 (1)
(1)
摘要 针对反电动势含有3次谐波的五相永磁同步电机(PMSM)开路和短路故障导致转矩脉动大的问题,该文提出一种基于扰动观测器的矢量控制(DOB-FOC)策略。该策略基于降阶正交变换矩阵在同步旋转坐标系上建立PMSM开路故障情况下的基波模型,将3次谐波反电动势、短路电流等作为扰动信号。在此基础上,设计扰动观测器,观测出以上扰动导致的转矩脉动,将其转化为q轴补偿电流前馈到q轴电流指令中,有效地抑制了故障导致的转矩脉动,并且实现了PMSM在开路和短路故障情况下的平稳无扰运行。仿真和实验结果验证了所提容错策略的有效性。
关键词:永磁同步电机(PMSM) 矢量控制(FOC) 开路故障 短路故障 扰动观测器
轮毂驱动具有效率高、驱动方式灵活等优点,因此成为电动汽车发展的趋势。由于永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)具有结构简单、功率密度大、效率高等优点,因此在轮毂驱动领域得到了广泛的应用[1]。相比三相PMSM,五相PMSM具有母线电流谐波小、转矩脉动低、控制自由度多等优势[2]。当某相发生故障时,无需额外硬件支持,仅需采用合适的容错控制策略就能继续平稳运行。
电机相开路和短路故障是比较常见的故障。当开路或短路故障发生后,不平衡的相电流将产生很大的转矩脉动,严重时将导致整个系统振荡,进而无法继续运行[3]。尽管定子采用单层分数槽集中绕组和容错齿方案,能有效增大相电感限制相短路电流,同时降低相与相之间的电磁耦合[4],但若没有合适的容错控制策略,不平衡的相电流仍会产生较大的转矩脉动[5]。重构非故障相电流,是获得平衡磁动势和确保故障电机容错运行的最直接方法。为获得该电流,一般采用故障前后不变的磁动势、镜像对称原理和最大转矩或最小铜耗三个准则[6]。
在开路容错电流基础上,确保故障电机平稳运行的关键是实现容错电流的跟踪控制。最简单的方法是在自然坐标系上采用电流滞环控制[7-9]。然而,这将导致开关频率不恒定,增加电磁兼容(Electro- magnetic Compatibility, EMC)设计难度[10]。比例谐振控制是一种有效跟踪交流信号的控制方法,其不但能避免以上问题,而且能实现电机开路和短路故障情况下的容错运行[11],但对于连续调速系统,将极大地增加控制器设计难度。直接转矩控制无法直接控制电流,但通过控制转矩和磁链也能间接实现电流跟踪控制。因此,将其和容错策略相结合能使电流矢量、定子磁链矢量在两相静止坐标系上的轨迹成为圆形,进而抑制故障导致的转矩脉动[12-15]。文献[12-14]基于抑制3次谐波思想合成虚拟容错电压矢量,并与直接转矩控制相结合,实现了五相异步电机开路故障情况下的平稳运行。文献[15]根据开路故障下电压矢量的特点设计了容错开关表,避免故障后控制系统的重构以及电压矢量的二次选择。尽管容错直接转矩控制能有效改善故障电机稳态和动态性能,然而相比矢量控制,滞环比较器使其存在较大的转矩脉动和电流谐波。
矢量控制能直接对同步旋转坐标系中的电流进行控制,具有很好的电流跟踪效果。当电机发生单相开路故障后,借助空间矢量解耦概念和开路容错电流,采用传统变换矩阵[16]、降阶变换矩阵[17-18]或降阶正交变换矩阵[19],都能有效抑制开路故障导致的转矩脉动[6]。当五相PMSM含有3次谐波反电动势时,在正常运行过程中注入3次谐波电流能提高其输出转矩[20]。然而,在开路故障情况下,永磁体的3次谐波磁场与基波电流相互作用将产生较大的2次和4次转矩脉动[21]。为减小由转子3次谐波磁场引起的转矩脉动,文献[22-23]在同步旋转dq坐标系中令故障电机转矩脉动为零得到电流参考值,在此基础上计算出铜耗最小的谐波电流,并在dq坐标系中将计算出的谐波电流注入。文献[24]在3次谐波空间定义降阶Clarke和Park变换矩阵,在此基础上推导出2次和4次转矩脉动的解析表达式,并结合铜耗最小或铜耗相等原则求出谐波电流,再在dq轴中注入该谐波电流。尽管以上两种谐波电流注入的方法均能抑制开路故障情况下3次谐波磁场导致的转矩脉动,但是注入的电流表达式比较复杂,且涉及的电机参数较多。
当含有3次谐波反电动势的五相PMSM发生短路故障时,在短路容错电流基础上,文献[5]采用电流滞环策略实现了短路故障情况下的电流跟随。文献[11]在自然坐标系上采用比例谐振实现了电流跟踪控制。另外,电流传感器的安装位置需要精心设计才能测得短路电流,极大地增加了系统的复杂度。
为抑制含有3次谐波反电动势的五相PMSM开路和短路故障导致的转矩脉动,同时使其在故障状态下的稳态和动态性能和正常情况下的性能相媲美,本文基于降阶正交变换矩阵,在dq坐标系上建立故障PMSM基波模型。在此基础上设计扰动观测器,进而提出一种基于扰动观测器的矢量控制(Disturbance-Observer-Based Field-Oriented Control, DOB-FOC)策略。为验证该策略的有效性,进行了相关仿真分析和实验研究。
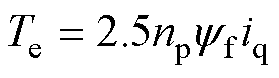
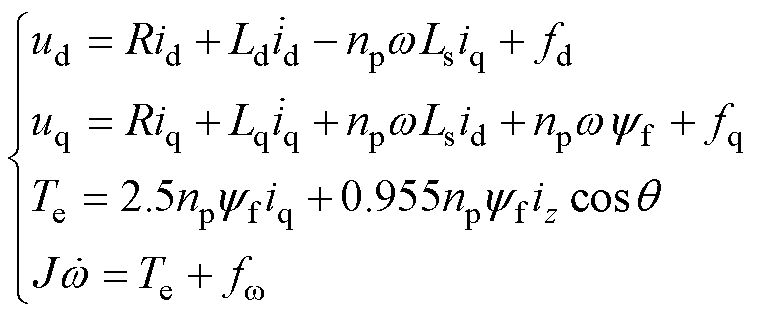
图1为五相20槽/18极PMSM拓扑,外转子采用模块化结构可有效避免漏磁,通过燕尾槽和额外的支撑固定转子。内嵌在外转子中的辐向永磁体具有聚磁效应,能提升电机输出转矩能力。分数槽单层集中绕组和容错齿实现相与相之间的磁和热隔离,以免一相发生故障后影响其他非故障相运行[21]。五相绕组星形联结,定子相互感的最大值相对自感非常小。因此,互感和相耦合的相关效应可忽略不计。自感Ls在一个周期内变化很小,可假设为常数。反电动势波形为梯形,其3次谐波占基波分量的20%[21]。本文将3次谐波反电动势导致的转矩脉动视作扰动的一部分,采用扰动观测器观测。因此,在建模过程中仅考虑基波成分,则该五相PMSM在dq轴上的基波数学模型可表示为
(1)
 (2)
(2)
式中,ud、uq和id、iq分别为定子相电压和相电流在d、q上的分量;R为相电阻; 为机械角速度;Te为电磁转矩;np为极对数;
为机械角速度;Te为电磁转矩;np为极对数; 为永磁磁链;Ls为电感。
为永磁磁链;Ls为电感。
图1 五相PMSM拓扑
Fig.1 Topology of five-phase PMSM
由于五相PMSM采用容错设计,当其某相发生开路或短路故障时,故障相不会影响正常相的运行,因此仅需解决由于缺相或短路引起的转矩脉动。不失一般性,假设A相发生开路故障。此时,故障PMSM剩余非故障相在自然坐标系上的电压模型可表示为
 (3)
(3)
式中,uB, uC, uD, uE、iB, iC, iD, iE、eB, eC, eD, eE分别为非故障相的相电压、相电流和反电动势。
当PMSM一相发生开路故障后,其控制自由度从原来的4个变为3个。因此,传统Clarke矩阵已不再适用于开路容错电流的变换。为了实现故障电机的容错矢量控制,变换矩阵需重新定义。为了确保故障情况下的3个自由度两两正交且控制能量转换的两个自由度仍然位于 平面上,同时另一个自由度位于和平面正交的平面z上且与平面垂直,定义降阶正交变换矩阵及其逆变换矩阵[19]分别为
平面上,同时另一个自由度位于和平面正交的平面z上且与平面垂直,定义降阶正交变换矩阵及其逆变换矩阵[19]分别为
 (4)
(4)
 (5)
(5)
式中, =
= 。
。
由于平面z中的自由度不参与能量转换,定义Park矩阵为
 (6)
(6)
式中,q 为转子电角度。
PMSM发生开路故障后,各相绕组交链的永磁磁链没有受影响,因此其相反电动势保持不变,在空间的位置也保持不变。然而,若采用式(4)和式(6)将其变换到dq轴上,其必然是脉动的。在建模过程中,对比正常情况下PMSM在dq轴上的基波模型,将故障情况下反电动势的脉动部分作为扰动的一部分;同时将电机参数摄动、未建模部分(如3次谐波反电动势)等干扰也作为扰动的一部分,采用式(4)和式(6)将式(3)变换到dq轴上,得到开路故障PMSM在dq坐标系上的模型为
 (7)
(7)
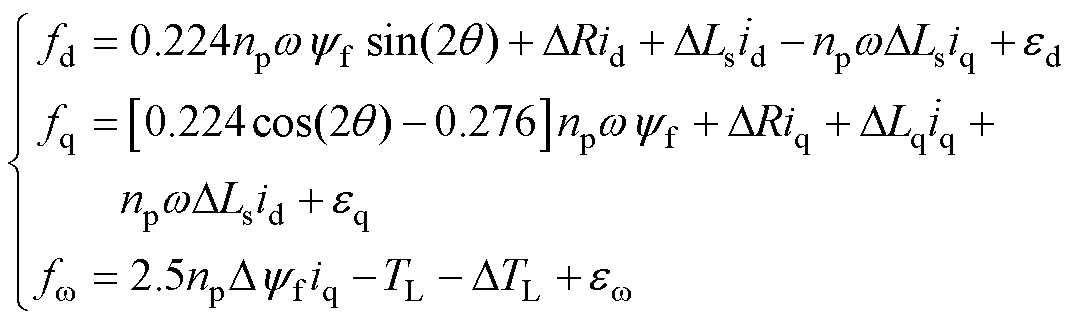
式中,J为转动惯量;iz为z平面的电流;fd、fq、 分别为参数摄动、外部扰动以及未建模部分(如3次谐波反电动势)引起的扰动。这些扰动可表示为
分别为参数摄动、外部扰动以及未建模部分(如3次谐波反电动势)引起的扰动。这些扰动可表示为
 (8)
(8)
式中,TL为负载; 、
、 、
、 、
、 分别为R、Ls、和TL的扰动量;
分别为R、Ls、和TL的扰动量; 、
、 、
、 为系统未建模扰动部分,包括3次谐波反电动势的扰动量。由式(7)可知,只需将电流iz控制为零,就能确保开路故障PMSM输出平稳的转矩。
为系统未建模扰动部分,包括3次谐波反电动势的扰动量。由式(7)可知,只需将电流iz控制为零,就能确保开路故障PMSM输出平稳的转矩。
当A相发生开路故障时,若PMSM反电动势仅含基波,A相电流为零,因此A相不产生转矩。此时,在不考虑外部扰动、3次谐波反电动势等情况下,仅需将id和iz控制为零,iq控制为恒定值,就能确保开路故障PMSM输出平稳转矩。然而,在外部存在扰动、反电动势存在3次谐波等情况时,故障PMSM输出的转矩将存在较大的脉动。若采用扰动观测器观测出上述扰动,并前馈给q轴电流指令,必然能确保该故障电机平稳运行。
当PMSM的A相发生短路故障时,由于采用容错设计,非故障相不受影响。此时,该故障PMSM转矩可看成是由非故障相电流与转子永磁磁链作用产生的转矩以及A相短路电流和转子永磁磁链作用导致的脉动转矩构成的。这两部分转矩相互之间不存在耦合。非故障相电流与转子永磁磁链作用产生的转矩如式(7)所示,因此可将短路电流导致的转矩脉动看成扰动量。采用扰动观测器观测扰动量,并前馈给q轴电流指令,就能有效抑制短路故障导致的转矩脉动。
PMSM发生故障后,继续采用id=0和iz=0控制,由式(7)可得
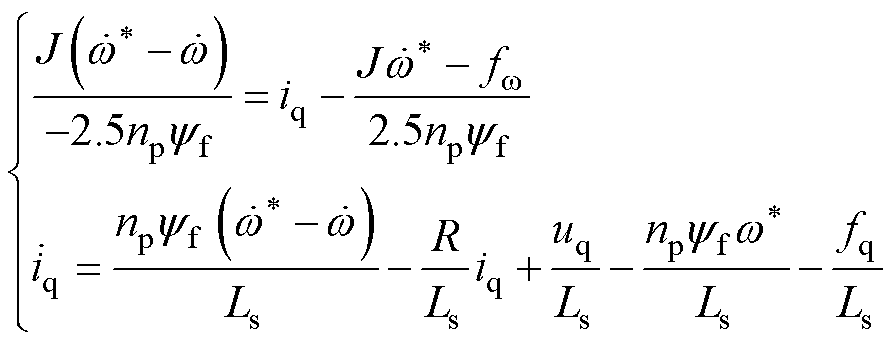 (9)
(9)
式中, 为参考机械角速度。
为参考机械角速度。
若定义状态变量为
 (10)
(10)
根据式(9)和式(10),故障PMSM的二阶扰动模型可表示为
 (11)
(11)
其中
根据不匹配/匹配扰动的定义,式(11)中,d1为不匹配扰动,d2为匹配扰动。匹配扰动能被PI控制有效抑制;而不匹配扰动很难被削弱。短路电流、外部扰动以及未建模部分(含3次谐波反电动势)等所引起的转矩脉动包含在不匹配扰动d1中。为抑制该扰动,需设法提取出该扰动,并前馈到系统中。根据式(11),所设计的扰动观测器[25]为
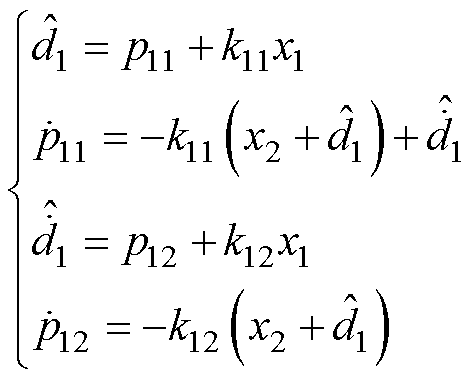 (12)
(12)
式中, 、
、 分别为
分别为 和
和 的估计值;p11、p12为辅助变量;k11和k12为观测器的增益,根据文献[25]稳定性证明和精度分析,k11、k12都应大于0以满足观测器稳定性的要求。
的估计值;p11、p12为辅助变量;k11和k12为观测器的增益,根据文献[25]稳定性证明和精度分析,k11、k12都应大于0以满足观测器稳定性的要求。
当反电动势仅含基波的PMSM发生开路故障后,采用文献[19]的容错控制策略,能抑制开路故障导致的转矩脉动;然而当PMSM的反电动势存在3次谐波,若补偿反电动势存在较大误差或外部扰动时,转矩脉动就无法有效抑制。然而,扰动观测器能将上述扰动估算出来,并将其前馈给q轴电流指令,进而有效抑制转矩脉动,从而提高PMSM开路故障情况下的运行性能,尤其是反电动势含有3次谐波的PMSM在开路故障情况下的抗扰性能。
由于PMSM采用容错设计,当发生相短路故障之后,非故障相不受短路故障相的影响,仍然能继续运行。非故障相电流产生的转矩与短路电流产生的转矩之间不存在耦合。因此,短路电流产生的转矩可认为是开路故障PMSM的外部扰动,采用扰动观测器估算出来,并结合开路容错策略,就能有效抑制短路故障导致的转矩脉动。
由式(11)可知,d1包含外部干扰、3次谐波反电动势产生的脉动转矩、永磁磁链变化导致的脉动转矩等。采用式(12)所示的DOB估算出这些扰动对应的电流,然后将观测值用于q轴电流指令的前馈补偿。由此,针对PMSM相开路或短路故障所提出的DOB-FOC策略如图2所示。
可见,当PMSM发生相开路或短路故障之后,无需考虑反电动势是否含有3次谐波,发生的是开路故障还是短路故障,仅需根据式(4)和式(6)在dq轴上建立其开路故障下的基波数学模型,然后在dq轴上设计扰动观测器,将观测出的扰动前馈给q轴电流指令,就能实现故障PMSM的平稳运行。
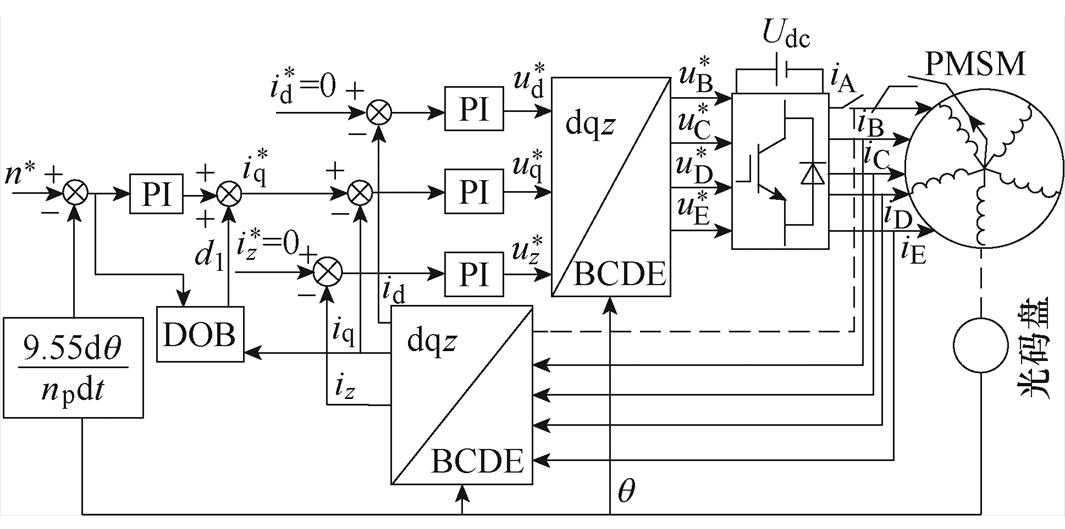
图2 基于DOB-FOC开路和短路容错控制框图
Fig.2 Block diagram of fault-tolerant control based on DOB-FOC under open-circuit or short-circuit fault
在文献[19]开路容错基波数学模型的基础上设计扰动观测器,无需考虑反电动势是否含有3次谐波就能有效估算出短路电流导致的转矩脉动,有效抑制开路和短路故障导致的转矩脉动。因此与文献 [19]中的容错控制(Fault-Tolerant Control, FTC)策略进行了对比分析,以验证本文所提DOB-FOC策略的有效性。五相PMSM参数见表1。转矩脉动评估采用文献[26]中转矩脉动标准差计算。
表1 五相PMSM参数
Tab.1 Five-phase PMSM parameters
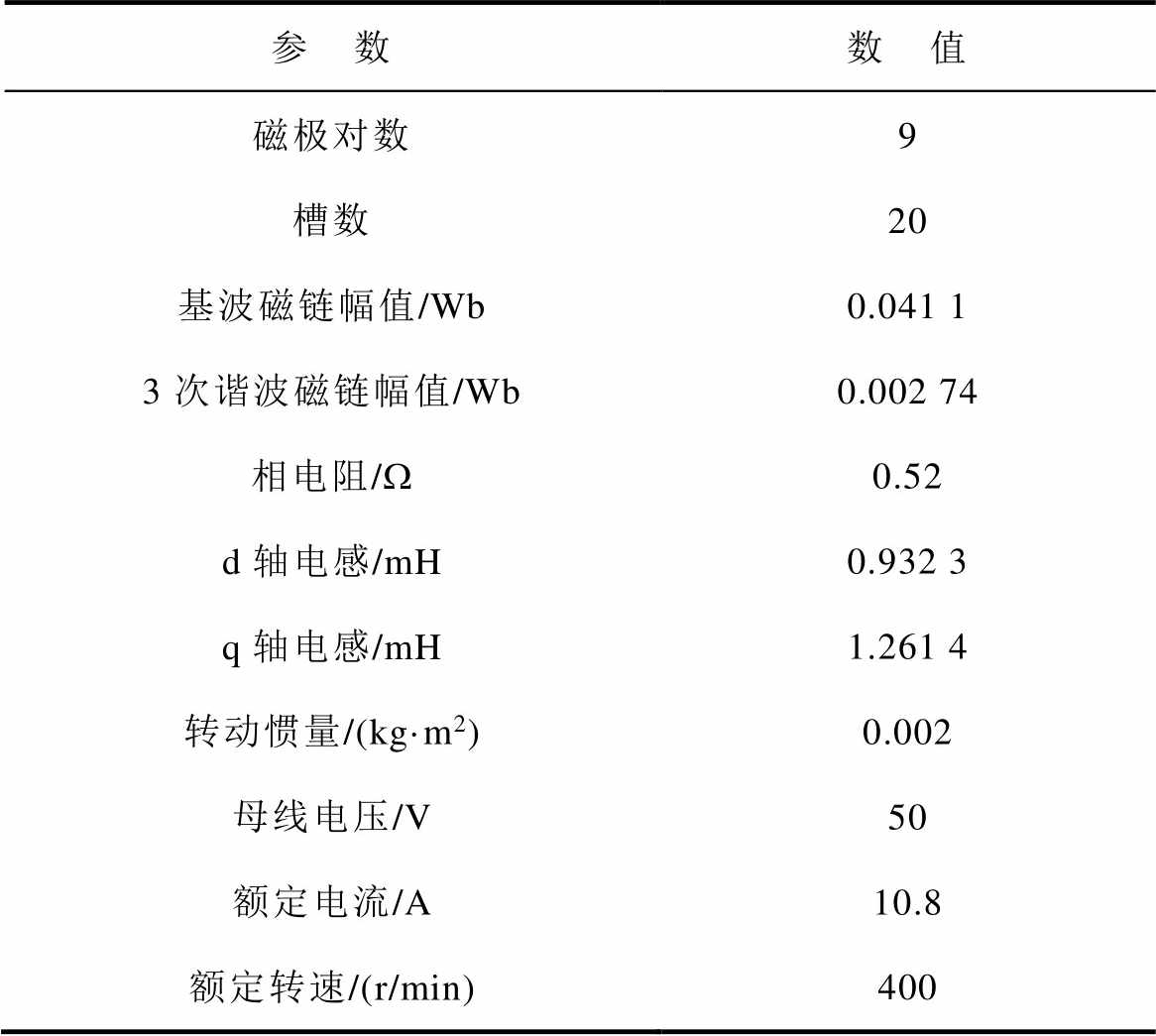
参 数数 值 磁极对数9 槽数20 基波磁链幅值/Wb0.041 1 3次谐波磁链幅值/Wb0.002 74 相电阻/W0.52 d轴电感/mH0.932 3 q轴电感/mH1.261 4 转动惯量/(kg·m2)0.002 母线电压/V50 额定电流/A10.8 额定转速/(r/min)400
假设PMSM反电动势仅含基波,采用FOC策略在转速400 r/min、负载转矩5 N·m下正常运行,在0.3 s发生开路或短路故障,并立即启动文献[19]的FTC策略,在0.4 s启动本文所提出的DOB-FOC策略,转矩和转速波形如图3所示。可见,FTC和DOB-FOC均能有效抑制开路故障导致的转矩脉动,电机转速平稳。当PMSM发生短路故障之后,采用FTC策略,电机输出转矩仍然有较大的脉动。由于仍然采用与正常运行情况下相同参数的速度控制器,短路电流引起的转矩脉动将导致电机速度出现一定的脉动。然而,当采用DOB-FOC策略后,短路故障导致的转矩脉动得到了有效地抑制,电机输出转矩性能和正常情况下相似,在采用和正常情况下相同的速度控制器转速波形仍然平滑。
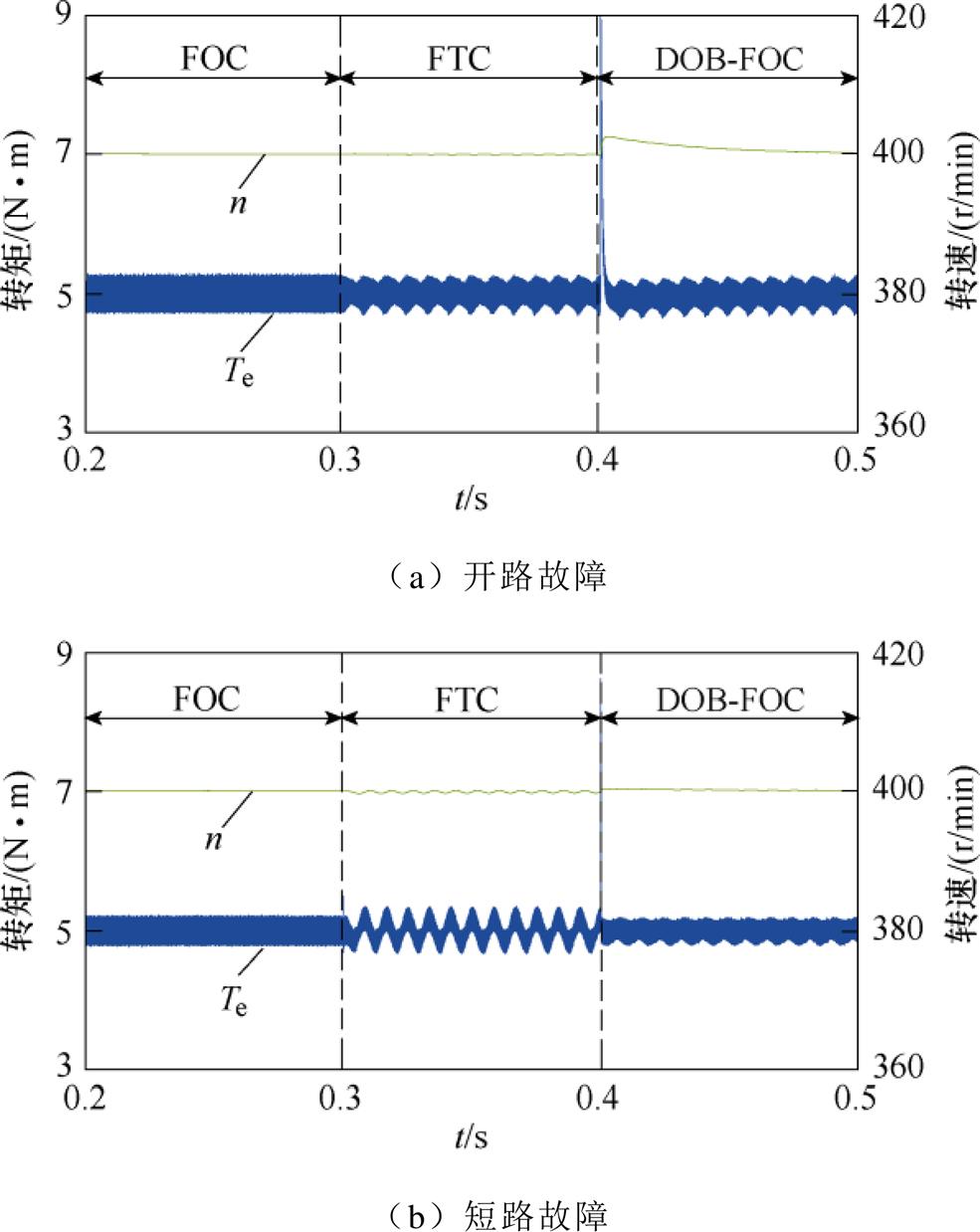
图3 反电动势仅含基波时正常到故障的转速和转矩响应
Fig.3 Responses of torque and speed from healthy operation to fault operation when back-EMFs only containing fundamental components
由表1可知,PMSM 3次谐波反电动势达到20%的基波幅值。反电动势含有20% 3次谐波时正常到故障情况下的转矩和电流响应如图4所示。由图4可见,正常情况下的转矩脉动为0.125 N·m;在文献[19]的FTC策略下,即使转速控制器不断调整以降低故障导致的转速波动,但是开路和短路故障导致的转矩脉动仍然无法抑制,其脉动分别为0.271 N·m和0.325 N·m,且转速存在较大的脉动。然而,采用DOB-FOC策略后,在与FTC策略相同速度控制器下,开路和短路故障导致的转矩脉动都能得到有效抑制,转矩脉动与正常情况下相似,分别为0.127 N·m和0.128 N·m,相比FTC分别降低了53.14%和60.61%,且转速曲线较光滑。
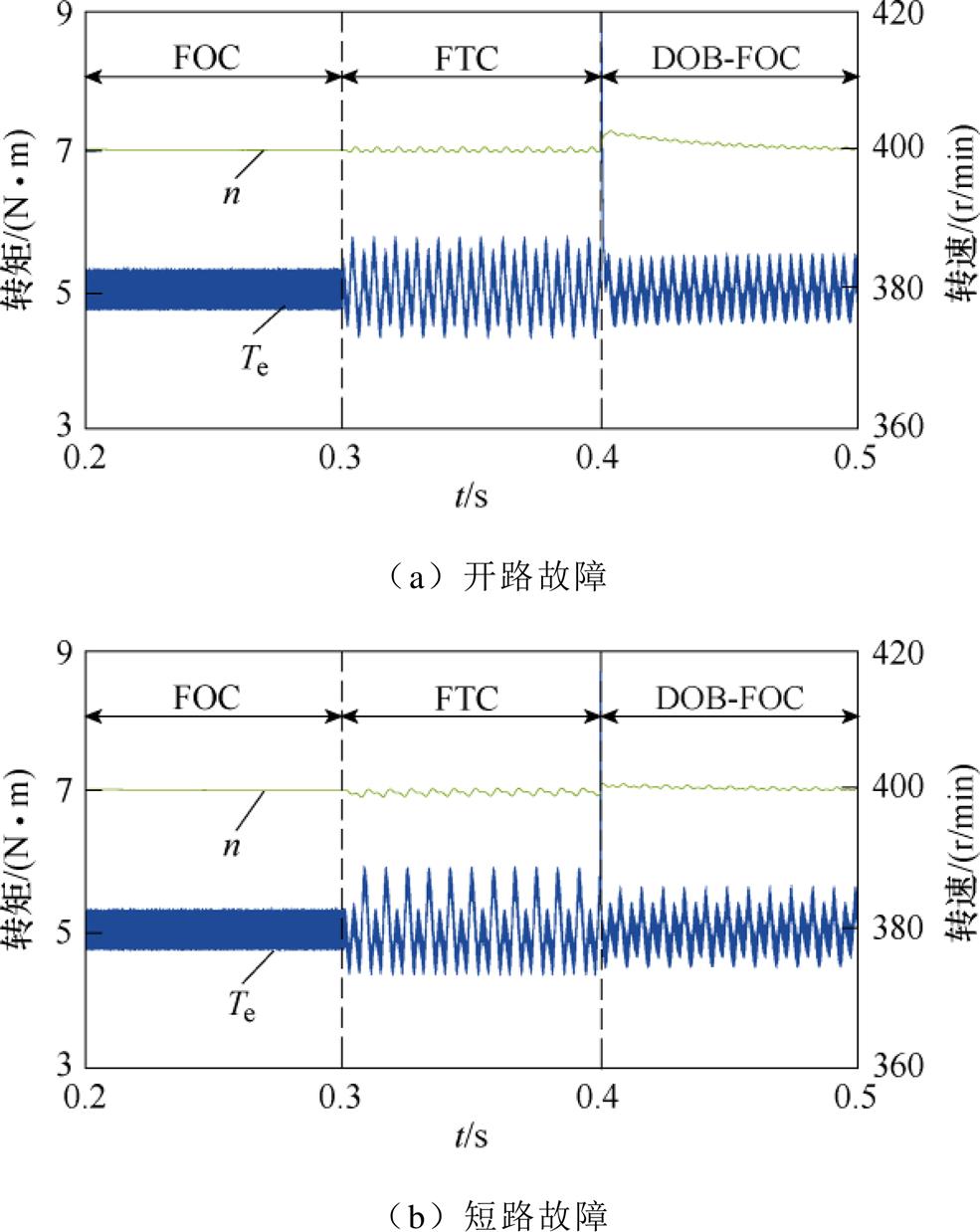
图4 反电动势含有20% 3次谐波时正常到故障情况下的转矩和电流响应
Fig.4 Responses of torque and speed from healthy operation to fault operation when back-EMF contains 20% third harmonic
为进一步验证本文所提DOB-FOC策略在五相PMSM开路和短路故障情况下的有效性,搭建了如图5所示的实验平台,并进行了稳态和动态性能测试,电机参数见表1。采用基于PM100CVA120功率模块和TMS320F2812 DSP的电压源逆变器驱动控制,伺服电动机和磁粉制动器作为负载。实验中采用继电器断开电机A相来模拟开路故障;通过继电器闭合电机A相与中心点的连接来模拟短路故障。采样时间Ts=100 ms。
五相PMSM在转速400 r/min、负载5 N·m稳态运行过程中发生开路或短路故障,100 ms后启动文献[19]的FTC策略。图6为该过程的转矩、转速和相电流波形。可见,正常情况下转矩平稳,转矩脉动为0.13 N·m,B相电流总谐波畸变率(Total Harmonic Distortion, THD)为14.16%;故障后,转矩出现了很大的脉动,短路情况下的转矩脉动尤为严重。容错运行时,FTC策略较好地抑制了转矩脉动,但其波动仍比较明显。开路容错运行情况下的转矩脉动为0.22 N·m,B相电流THD为14.58%;短路容错运行情况下转矩脉动为0.33 N·m,B相电流THD为13.95%。
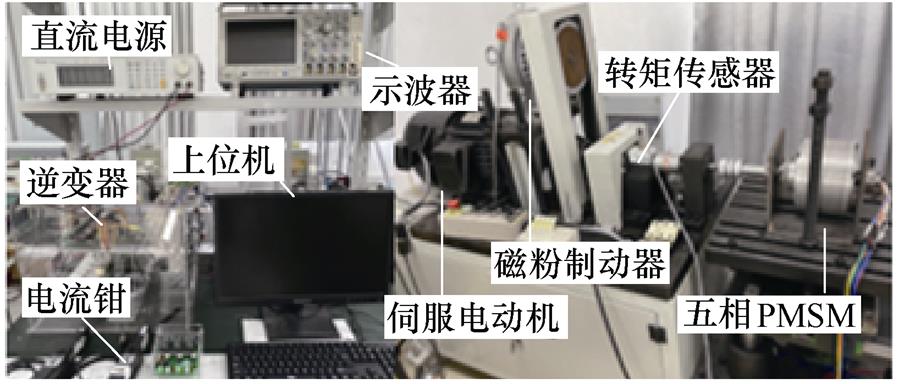
图5 五相PMSM实验平台
Fig.5 Experimental platform of five-phase PMSM
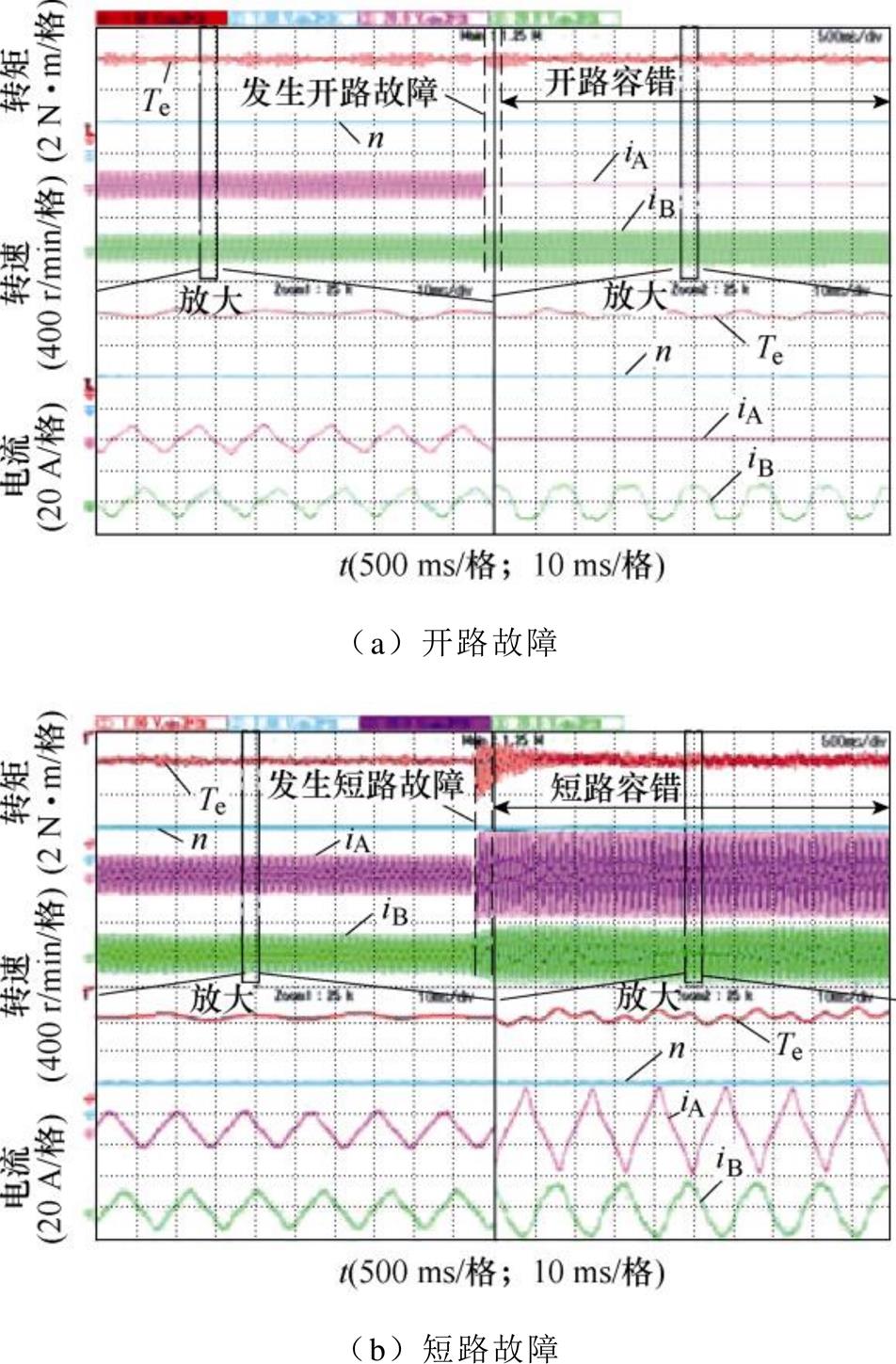
图6 从正常到故障下采用FTC运行过程中的转矩、转速和电流波形
Fig.6 Responses of torque, speed and current waveforms from healthy operation to fault operation with FTC
PMSM在稳态运行过程中,发生开路或短路故障,100 ms后启动本文提出的DOB-FOC策略,电机的转矩、转速和相电流波形如图7所示。需要强调的是,在开路和短路故障情况下的DOB-FOC策略中的速度环和电流环PI参数均与FTC以及正常情况下的相同,具体参数见表2。可见,开路故障下启用DOB-FOC后,开路故障导致的转矩脉动得到了有效抑制,转矩脉动为0.14 N·m,与正常情况相近;B相电流幅值增大且波形的正弦度较好,其THD为13.42%。短路故障下启用DOB-FOC后,转矩脉动得到有效抑制,迅速恢复到正常情况下的数值,转矩脉动仅为0.19 N·m,B相电流幅值增大,电流波形正弦度得到提升,其THD为11.13%。
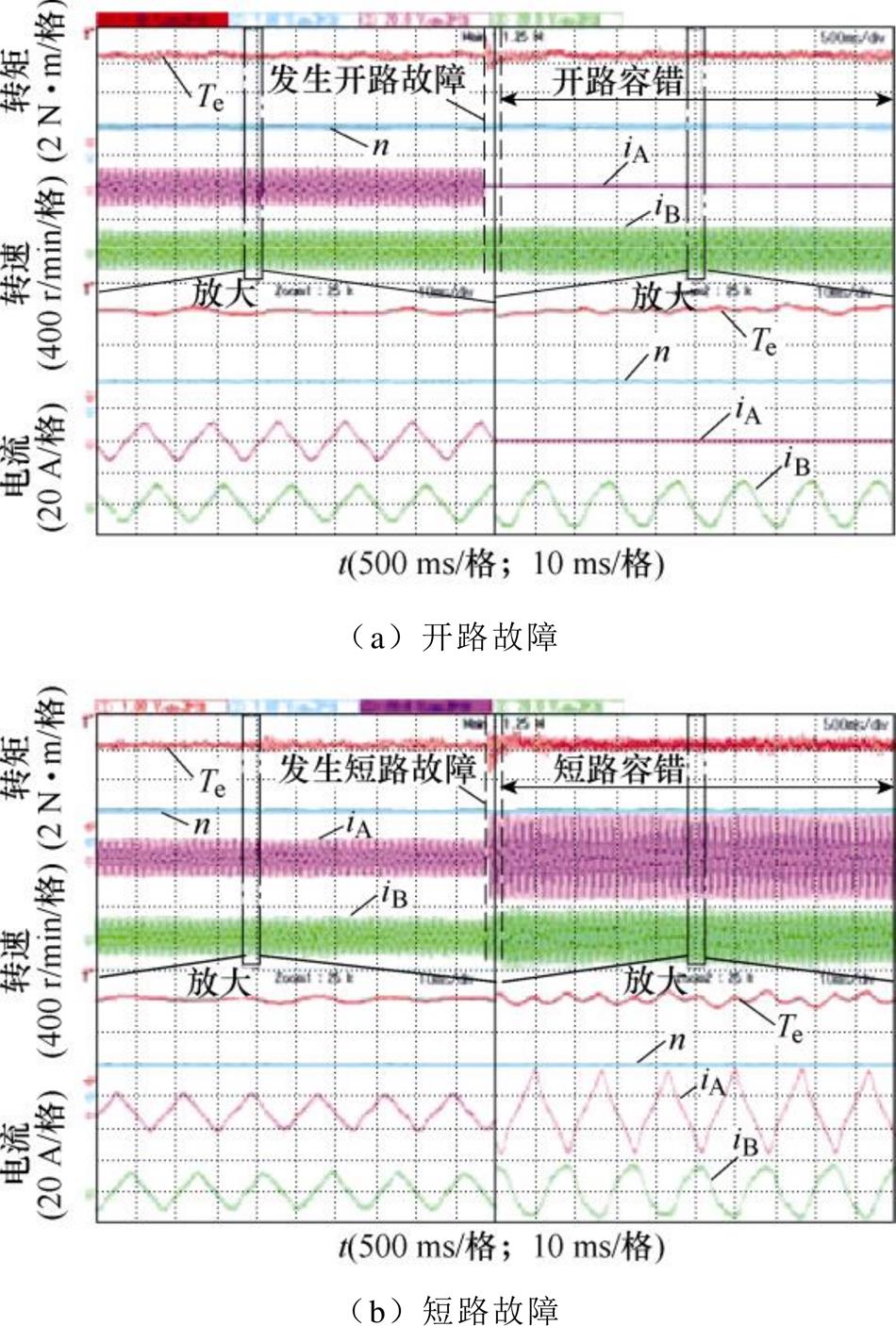
图7 从正常到故障下采用DOB-FOC运行时的转矩、转速和电流波形
Fig.7 Responses of torque, speed and current waveforms from healthy operation to fault-tolerant operation with proposed DOB-FOC
表2 PI控制器参数
Tab.2 PI controller parameters
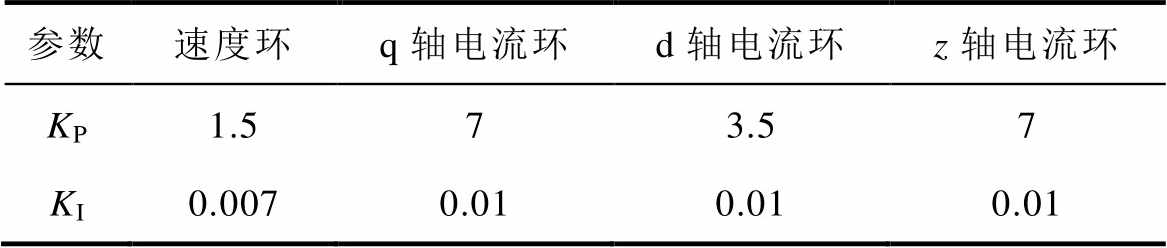
参数速度环q轴电流环d轴电流环z轴电流环 KP1.573.57 KI0.0070.010.010.01
图8为采用DOB-FOC策略运行时的扰动观测值d1、dq轴电流和A相电流波形。可见,故障发生后d1出现了较大的波动;短路故障情况下的d1波动比开路故障情况下明显。由于d1前馈补偿给q轴电流,致使dq轴电流出现了波动。因此,电机无论是发生开路或短路故障,扰动观测器都能将扰动有效估算出来,并前馈给q轴电流指令抑制转矩脉动,确保PMSM在故障情况下平稳运行。经实验确定,扰动观测器最佳增益为k11=1 500,k12=900。k11、k12越小,扰动观测器输出值越小,无法有效抑制由故障引起的转矩扰动;而k11、k12越大,扰动观测器输出幅值越大,亦会增大转矩扰动和噪声,无法改善电机故障状态下的运行性能。
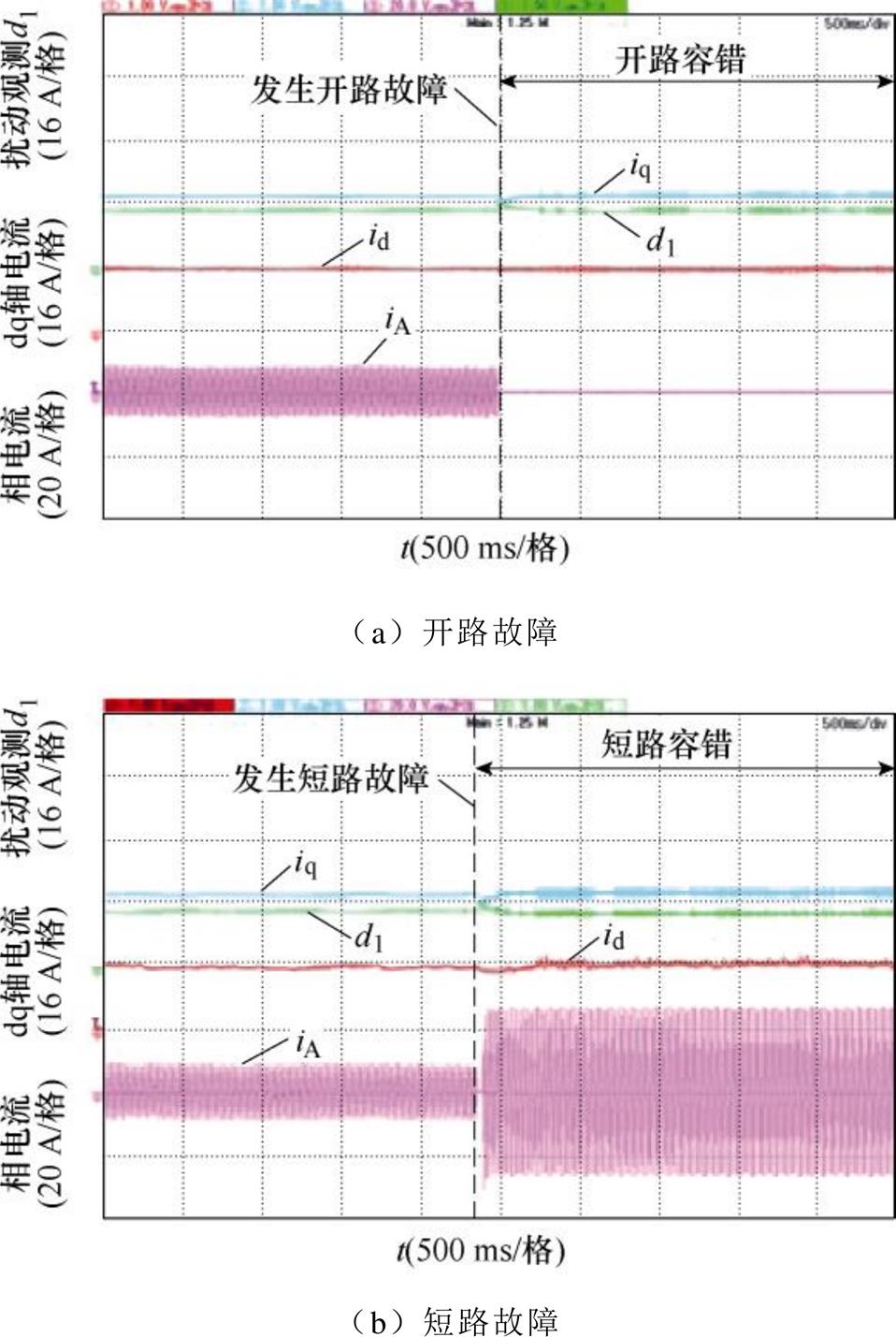
图8 从正常到故障下采用DOB-FOC运行时的扰动观测值和电流波形
Fig.8 Responses of disturbance observation and currents from healthy operation to fault-tolerant operation with DOB-FOC
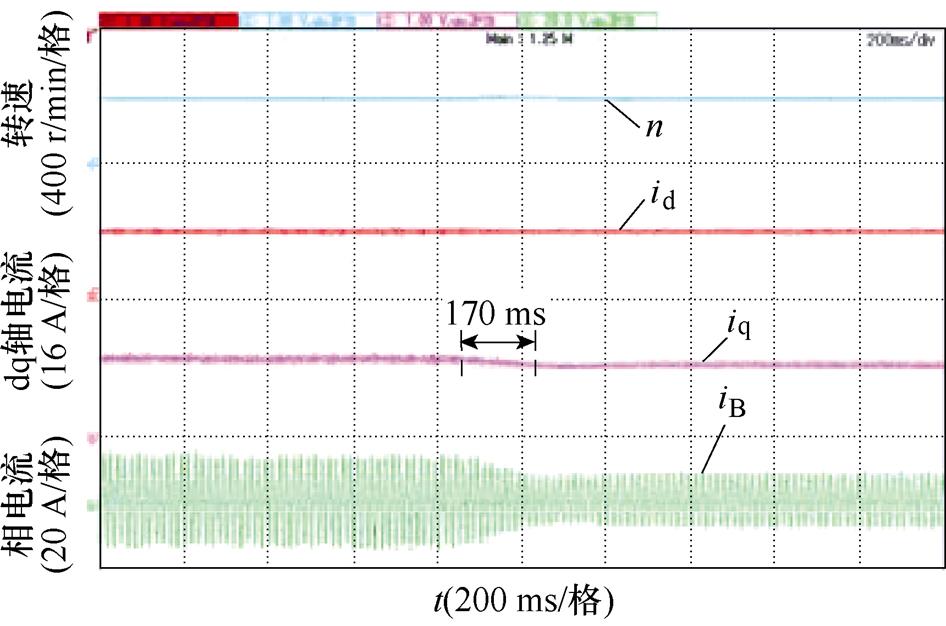
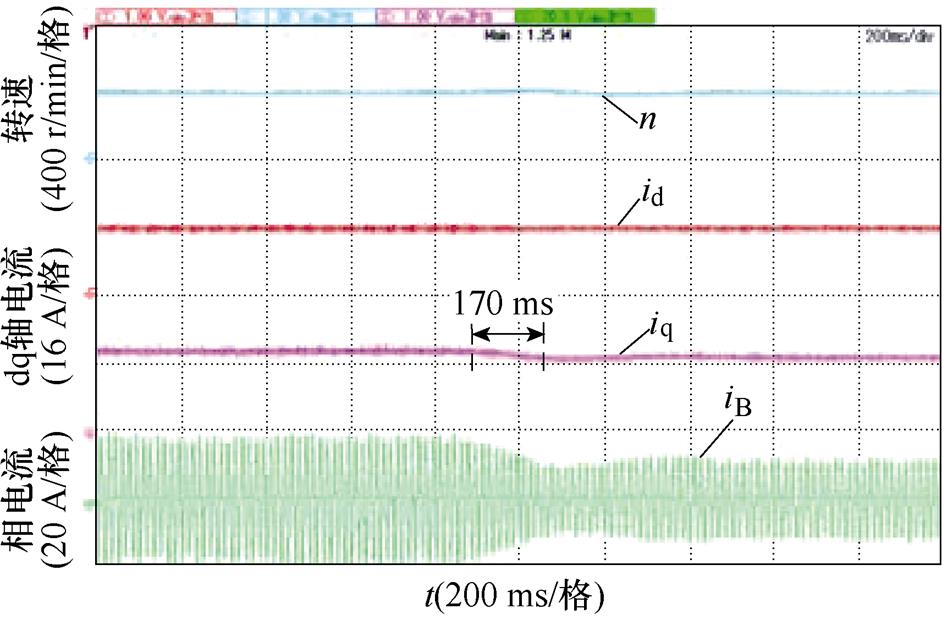
图9为PMSM在正常情况下,负载在3 N·m和5 N·m之间阶跃时的转速、dq轴电流以及B相电流响应。图10和图11分别为PMSM开路和短路故障情况下,启动DOB-FOC策略后,相同负载阶跃情况下的转速和电流响应。可见,在相同的速度环PI控制下,负载无论是向上还是向下阶跃,PMSM在开路和短路故障情况下的速度性能和正常情况下相当。在负载阶跃过程中,d轴电流基本保持不变,q轴电流的数值和变化趋势与正常情况下相似,其响应时间均为170 ms。因此,当PMSM发生开路或短路故障并启用DOB-FOC策略后,电机转速均能快速恢复到400 r/min,其速度抗负载扰动能力和正常情况下相当。
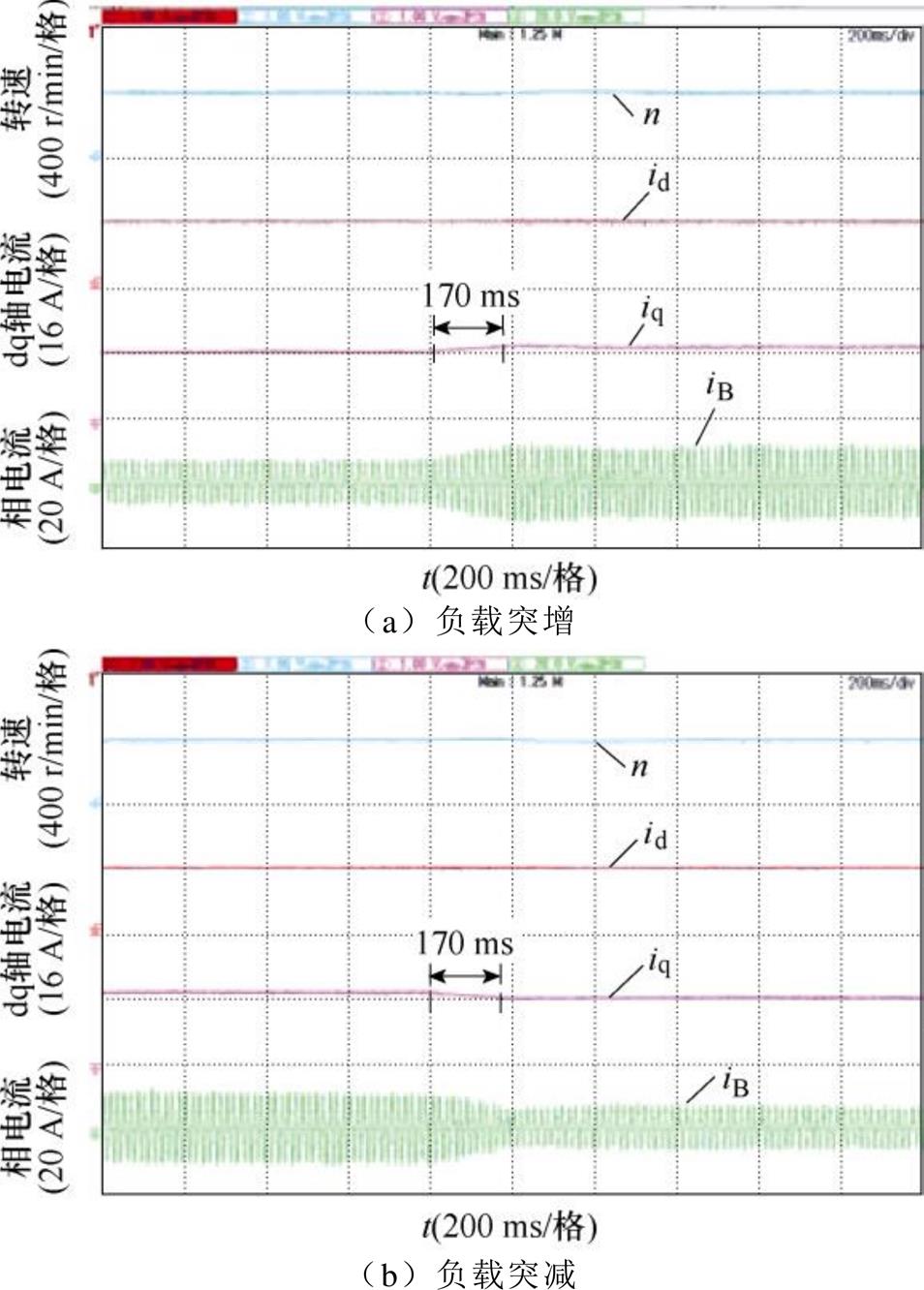
图9 正常运行时负载阶跃情况下转速和电流响应
Fig.9 Responses of speed and currents during load step changes under healthy condition
(a)负载突增
(b)负载突减
图10 开路故障下负载突变时的转速和电流响应
Fig.10 Responses of speed and currents during load step changes under open-circuit fault condition
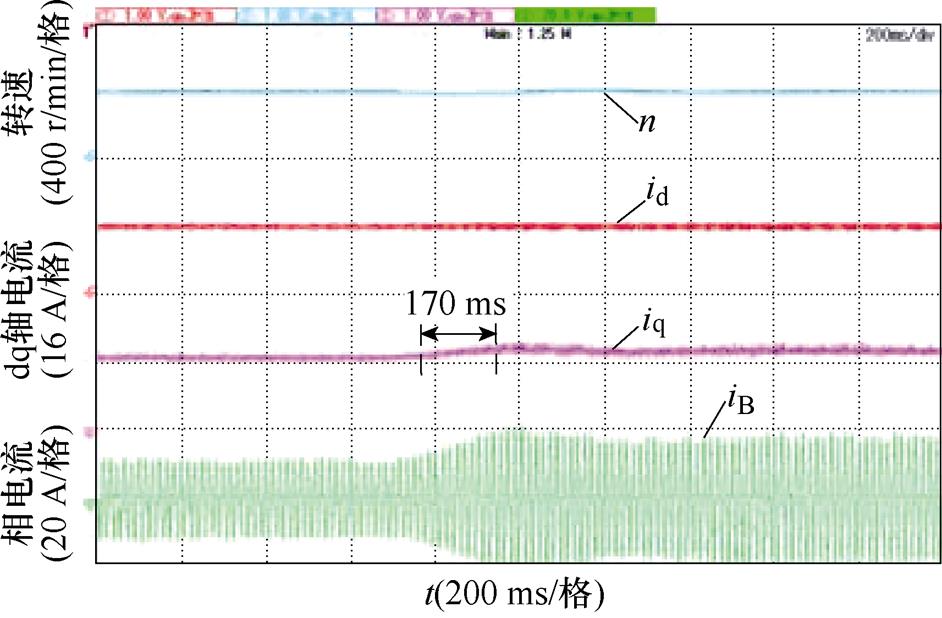
(a)负载突增
(b)负载突减
图11 短路故障下负载突变时的转速和电流响应
Fig.11 Responses of speed and currents during load step changes under short-circuit fault condition
图12为电机正常运行在负载为3 N·m的工况下,参考速度在300~400 r/min之间突变的转速、q轴电流以及A相和B相电流波形。图13和图14分别为PMSM发生开路和短路故障情况下,启动DOB-FOC策略后的转速和电流波形。比较图12~图14可知,电机故障情况下采用DOB-FOC策略后,转速突变过程中,q轴电流的变化趋势和稳态值与正常情况下基本相近。相比正常和开路容错情况下的相电流幅值,短路故障情况下的非故障电流幅值最大。更为关键的是,故障PMSM在采用DOB-FOC策略后极大地降低了故障对转速性能的影响,其动态性能和正常情况下相似,响应时间皆为240 ms。
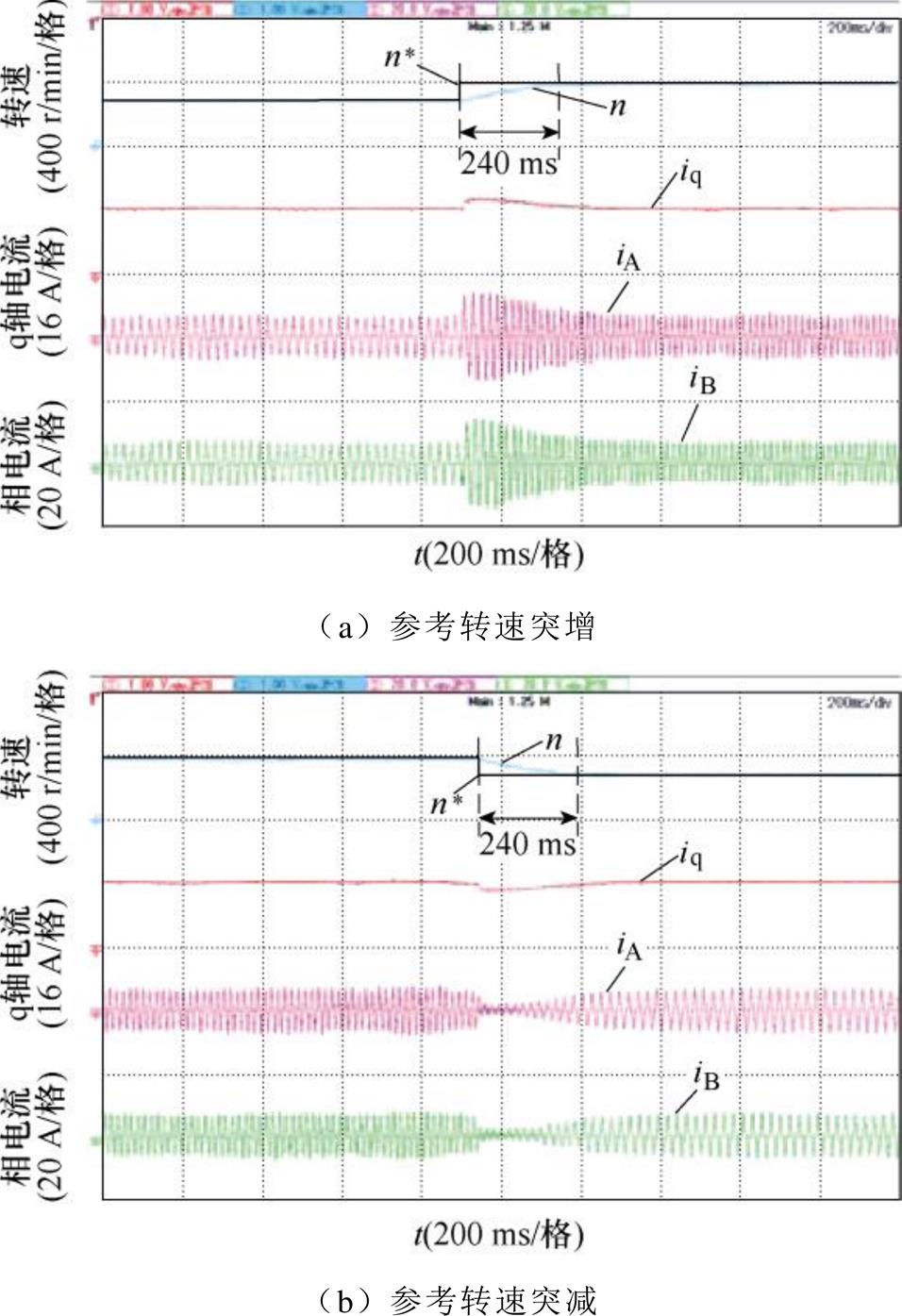
图12 正常运行时速度阶跃下的转速和电流响应
Fig.12 Responses of speed and currents during speed reference step changes under healthy condition
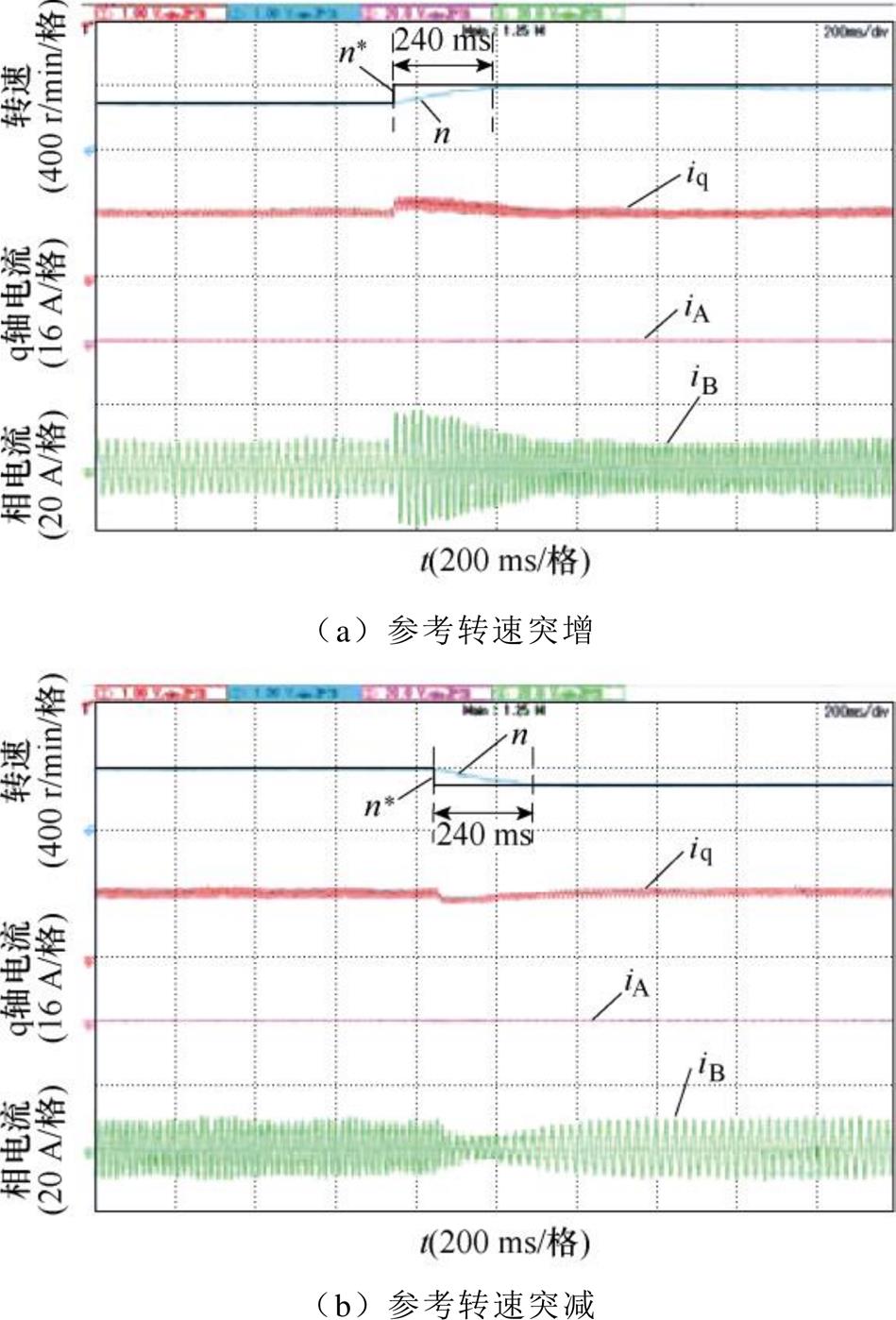
图13 开路故障下速度突变时的转速和电流响应
Fig.13 Responses of speed and current during speed reference step changes under open-circuit fault condition
本文为实现反电动势含3次谐波的五相PMSM在单相开路和短路故障情况下的无扰动平稳运行,提出了一种基于扰动观测器的容错矢量控制策略,有效抑制了故障导致的转矩脉动,并使故障PMSM的稳态和动态性能与正常情况下相媲美。其具有如下优点:
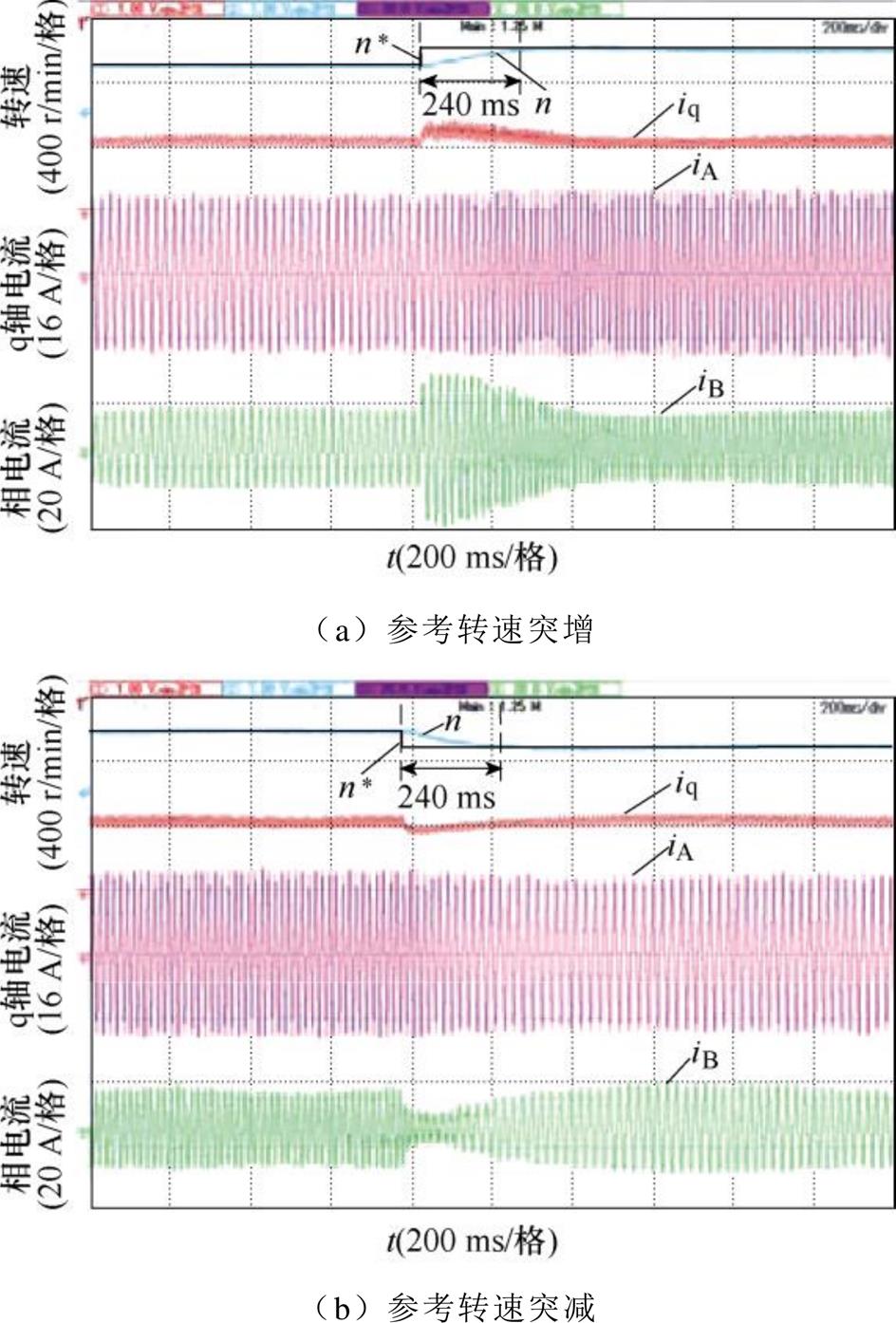
图14 短路故障下速度突变时的转速和电流响应
Fig.14 Responses of speed and currents during speed reference step changes under short-circuit fault condition
1)该策略只需建立故障电机的基波数学模型,无需考虑3次谐波反电动势,就能有效抑制开路和短路故障情况下的3次谐波反电动势导致的转矩 脉动。
2)该策略无需额外硬件支持就能有效估算出短路电流导致的转矩脉动,亦可有效观测出两相故障导致的扰动,增强了PMSM对故障、外部扰动的抗扰性能。
3)该策略不仅适用于反电动势仅含基波的PMSM,还适用于反电动势含3次谐波的PMSM,同时适用于相开路和相短路两种故障。
参考文献
[1] 卢浩, 杜怿, 刘新波, 等. 磁场调制型双馈无刷混合励磁电机及其静态性能分析[J]. 电工技术学报, 2020, 35(14): 2969-2978.
Lu Hao, Du Yi, Liu Xinbo, et al. Static performance analysis of magnetic field-modulated doubly-fed brushless hybrid excitation motor[J]. Transactions of China Electrotechnical Society, 2020, 35(14): 2969- 2978.
[2] 周华伟, 叶晨, 陈铖, 等. 基于转子磁链观测器的五相容错PMSM开路故障下的无位置传感器控制[J]. 电工技术学报, 2023, 38(2): 422-434.
Zhou Huawei, Ye Chen, Chen Cheng, et al. Rotor-flux observer based sensorless control of five-phase fault-tolerant PMSM with open-circuit fault[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 422-434.
[3] 周长攀, 刘海峰, 景国秀, 等. 双三相永磁同步电机缺相容错运行虚拟矢量间接修正方法及其在直接转矩控制中应用[J]. 电工技术学报, 2023, 38(2): 451-464.
Zhou Changpan, Liu Haifeng, Jing Guoxiu, et al. The indirect correction method of virtual vectors for dual three-phase permanent magnet synchronous motors under the open-phase fault and its application in the direct torque control[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 451-464.
[4] 孙玉华, 赵文祥, 吉敬华, 等. 高转矩性能多相组永磁电机及其关键技术综述[J]. 电工技术学报, 2023, 38(6): 1403-1420.
Sun Yuhua, Zhao Wenxiang, Ji Jinghua, et al. Overview of multi-star multi-phase permanent magnet machines with high torque performance and its key technologies[J]. Transactions of China Electrotech- nical Society, 2023, 38(6): 1403-1420.
[5] Wu Fan, Tong Chengde, Sui Yi, et al. Influence of third harmonic back EMF on modeling and remediation of winding short circuit in a multiphase PM machine with FSCWs[J]. IEEE Transactions on Industrial Electronics, 2016, 63(10): 6031-6041.
[6] Zhao Meiling, Liu Guohai, Chen Qian, et al. Fault- tolerant control of a triple redundant PMA-SynRM driven under single-phase open-circuit by mono- inverter[J]. IEEE Transactions on Power Electronics, 2021, 36(10): 11593-11605.
[7] 匡志, 杜博超, 徐浩, 等. 十五相永磁同步电机的驱动控制与容错运行[J]. 电工技术学报, 2019, 34(13): 2734-2743.
Kuang Zhi, Du Bochao, Xu Hao, et al. Drive control and fault-tolerant operation of fifteen phase per- manent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2019, 34(13): 2734-2743.
[8] 刘自程, 李永东, 郑泽东. 多相电机控制驱动技术研究综述[J]. 电工技术学报, 2017, 32(24): 17-29.
Liu Zicheng, Li Yongdong, Zheng Zedong. Control and drive techniques for multiphase machines: a review[J]. Transactions of China Electrotechnical Society, 2017, 32(24): 17-29.
[9] Park H, Kim T, Suh Y. Fault-tolerant control methods for reduced torque ripple of multiphase BLDC motor drive system under open-circuit faults[J]. IEEE Transactions on Industry Applications, 2022, 58(6): 7275-7285.
[10] 彭金融, 毛行奎, 崔文玲, 等. 基于插入无源二端口网络的噪声源阻抗提取方法研究[J]. 电工技术学报, 2023, 38(2): 523-532.
Peng Jinrong, Mao Xingkui, Cui Wenling, et al. Research on noise soure impedance extraction method based on inserting passive two-port network[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 523-532.
[11] Wang Huanran, Gu Chunyang, Wang Shuo, et al. Single-phase short-circuit fault tolerant control for five-phase permanent magnet machines with copper loss reduction[J]. IEEE Transactions on Industrial Electronics, 2023, 70(11): 11087-11097.
[12] Bermudez M, Gonzalez-Prieto I, Barrero F, et al. Open-phase fault-tolerant direct torque control technique for five-phase induction motor drives[J]. IEEE Transactions on Industrial Electronics, 2017, 64(2): 902-911.
[13] Bermudez M, Gonzalez-Prieto I, Barrero F, et al. An experimental assessment of open-phase fault-tolerant virtual-vector-based direct torque control in five- phase induction motor drives[J]. IEEE Transactions on Power Electronics, 2018, 33(3): 2774-2784.
[14] Zhang Li, Fan Ying, Cui Ronghua, et al. Fault- tolerant direct torque control of five-phase FTFSCW- IPM motor based on analogous three-phase SVPWM for electric vehicle applications[J]. IEEE Transactions on Vehicular Technology, 2018, 67(2): 910-919.
[15] 刘国海, 曹彦琳, 周华伟, 等. 基于新型开关表的五相永磁同步电机容错直接转矩控制[J]. 中国电机工程学报, 2021, 41(18): 6399-6408.
Liu Guohai, Cao Yanlin, Zhou Huawei, et al. Novel switching-table based fault tolerant DTC for five- phase PMSM[J]. Proceedings of the CSEE, 2021, 41(18): 6399-6408.
[16] Zhang Li, Zhu Xiaoyong, Cui Ronghua, et al. A generalized open-circuit fault-tolerant control strategy for FOC and DTC of five-phase fault-tolerant permanent-magnet motor[J]. IEEE Transactions on Industrial Electronics, 2022, 69(8): 7825-7836.
[17] Tian Bing, Wei Jiadan, Molinas M, et al. Neutral voltage modeling and its remediation for five-phase PMSMs under single-phase short-circuit fault tolerant control[J]. IEEE Transactions on Transportation Electrification, 2022, 8(4): 4534-4548.
[18] Tian Bing, An Quntao, Duan Jiandong, et al. Decoupled modeling and nonlinear speed control for five-phase PM motor under single-phase open fault[J]. IEEE Transactions on Power Electronics, 2017, 32(7): 5473-5486.
[19] Zhou Huawei, Zhao Wenxiang, Liu Guohai, et al. Remedial field-oriented control of five-phase fault- tolerant permanent-magnet motor by using reduced- order transformation matrices[J]. IEEE Transactions on Industrial Electronics, 2017, 64(1): 169-178.
[20] 高宏伟, 杨贵杰, 刘剑. 三次谐波注入式五相永磁同步电机矢量控制策略[J]. 中国电机工程学报, 2014, 34(24): 4101-4108.
Gao Hongwei, Yang Guijie, Liu Jian. A vector control strategy for five-phase PMSM with third harmonic injection[J]. Proceedings of the CSEE, 2014, 34(24): 4101-4108.
[21] 陈前, 夏雨航, 赵文祥, 等. 采用无差拍电流跟踪的五相梯形反电动势永磁电机开路容错控制[J]. 电工技术学报, 2022, 37(2): 368-379.
Chen Qian, Xia Yuhang, Zhao Wenxiang, et al. Open-circuit fault-tolerant control for five-phase permanent magnet motors with trapezoidal back-EMF by deadbeat current tracking[J]. Transactions of China Electrotechnical Society, 2022, 37(2): 368-379.
[22] 熊聪, 许海平, 周鹏, 等. 五相永磁同步电机单相开路故障的容错矢量控制策略[J]. 中国电机工程学报, 2019, 39(23): 7055-7064, 7118.
Xiong Cong, Xu Haiping, Zhou Peng, et al. Fault-tolerant field oriented control for five-phase permanent-magnet motors under single phase open fault[J]. Proceedings of the CSEE, 2019, 39(23): 7055-7064, 7118.
[23] Xiong Cong, Guan Tao, Zhou Peng, et al. A fault-tolerant FOC strategy for five-phase SPMSM with minimum torque ripples in the full torque operation range under double-phase open-circuit fault[J]. IEEE Transactions on Industrial Electronics, 2020, 67(11): 9059-9072.
[24] Liu Guohai, Lin Zhipeng, Zhao Wenxiang, et al. Third harmonic current injection in fault-tolerant five-phase permanent-magnet motor drive[J]. IEEE Transactions on Power Electronics, 2018, 33(8): 6970-6979.
[25] Ginoya D, Shendge P D, Phadke S B. Sliding mode control for mismatched uncertain systems using an extended disturbance observer[J]. IEEE Transactions on Industrial Electronics, 2014, 61(4): 1983-1992.
[26] Huang Linsen, Ji Jinghua, Zhao Wenxiang, et al. Duty-ratio-based direct torque control with enhanced harmonic current suppression for dual-three-phase permanent magnet motor[J]. IEEE Transactions on Power Electronics, 2022, 37(9): 11098-11108.
Abstract The unbalanced phase currents of a multiphase permanent magnet synchronous motor(PMSM) generate large torque fluctuations when an open-circuit or short-circuit fault occurs, which causes the whole system to oscillate or even not continue operating. A novel field-oriented control strategy based on disturbance- observer (DOB-FOC) is proposed to restrain torque fluctuations in the five-phase PMSM with third harmonic back electromotive forces (EMF) under open-circuit and short-circuit fault conditions.
Firstly, a fundamental PMSM model with open-circuit fault is built in the synchronous rotating frame using an orthogonal reduced-order transformation matrix. The third harmonic back EMF and short-circuit current are recognized as disturbances. Secondly, a disturbance observer is designed. Then, a feedforward compensatory current obtained from the estimated disturbances is added to the q-axis current reference. Finally, the torque fluctuations caused by the fault can be restrained effectively, and the PMSM with the proposed strategy can operate well under open-circuit and short-circuit faults.
Simulation shows that when the third harmonic back EMF is 0 or 20% of the fundamental amplitude, DOB-FOC can effectively suppress the fluctuating torque caused by open-circuit and short-circuit faults. Therefore, whether the back EMF contains the third harmonics, the faulty motor with DOB-FOC has a similar steady-state performance in healthy conditions.Experimental results demonstrate the feasibility and effectiveness of the proposed strategy. When the open-circuit or short-circuit fault occurs, the proposed DOB-FOC strategy is activated at once, and the fluctuating torque is restrained to 0.14 N·m and 0.19 N·m, respectively. When the load steps between 3 N·m and 5 N·m, the d-axis current almost remains unchanged, the q-axis current is like that under healthy conditions, and the response time is 170 ms. During the reference speed step changes, the DOB-FOC strategy significantly reduces the fault impact on the speed performance. Its dynamic performance is similar to that under healthy conditions, and its response time is 240 ms.
The following conclusions can be drawn from the theoretical analysis, simulation, and experimental results. (1)The proposed strategy can effectively suppress the fluctuating torque caused by the third harmonic back EMF under open-circuit or short-circuit faults. (2) DOB can effectively estimate torque fluctuations caused by short-circuit current and observe the disturbance caused by two-phase faults without additional hardware support. (3)The proposed strategy is suitable for PMSM with only fundamental back EMF or third harmonic back EMF.
keywords:Permanent magnet synchronous motor (PMSM), field-oriented control (FOC), open-circuit fault, short-circuit fault, disturbance observer
DOI: 10.19595/j.cnki.1000-6753.tces.230988
中图分类号:TM351
国家自然科学基金资助项目(52277052)。
收稿日期 2023-06-26
改稿日期 2023-07-20
周华伟 男,1980年生,教授,博士生导师,研究方向为电动汽车和电磁悬架用特种永磁电机驱动控制、容错控制等。E-mail: zhouhuawei@ujs.edu.cn(通信作者)
陈 铖 男,1995年生,博士研究生,研究方向为永磁电机控制。E-mail: 827181834@qq.com
(编辑 崔文静)