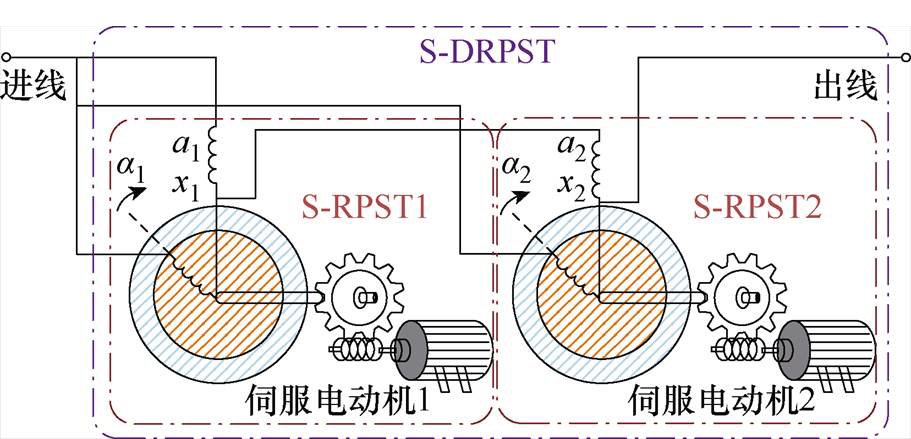
图1 S-DRPST拓扑结构
Fig.1 Topology of S-DRPST
摘要 针对高速铁路供电系统在高压电网引起的负序问题,该文参考旋转潮流控制器(RPFC)和静止无功补偿器(SVG)结构,提出一种基于单相双旋转移相变压器(S-DRPST)的新型负序补偿拓扑。首先,分析S-DRPST的工作原理并建立其稳态电压源模型。其次,在V/x牵引供电系统应用场景下,提出S-DRPST的负序电流补偿方法,即根据供电臂负载功率计算所需补偿电流表达式,进而得到两台S-DRPST输出电压幅值与相位,通过调节移相角大小实现电网侧电流的平衡。在此基础上,对单台S-DRPST移相角控制进行设计,补偿设备投入前利用柔性合环减小对牵引网的冲击,投入后采取移相角协调变速控制,使得移相角在接近设定值时降低转速,同时根据角度偏差协调转速控制,从而抑制输出电压振荡现象。最后,利用Matlab/Simulink软件搭建牵引供电系统进行仿真验证,在合环场景下将S-DRPST柔性投入牵引网,仅a相供电臂带负载的情况下,电压不平衡度从4.81%降低到了0.05%,在计及供电臂制动状态时不同工况的不平衡电压均被控制在0.1%以下,在牵引负载快速连续变化下S-DRPST能及时响应补偿负序电流,结果表明S-DRPST在高速铁路供电系统中具有良好的负序补偿效果。
关键词:高速铁路供电系统 单相双旋转移相变压器 负序电流补偿 移相角控制
目前,我国铁路积极提高基础设施建设和技术装备绿色化水平,逐步迈入高质量发展新时代[1]。而在高速铁路系统中,采用四象限脉宽调制(Pulse Width Modulation, PWM)控制的交直交型电力机车逐渐成为主要车型[2-4]。该车型相较于交直型电力机车具有牵引功率大、功率因数高和谐波含量低等优点,使得无功功率和低次谐波问题得以缓解,但牵引功率的提升加剧了电网负序问题[5]。另外我国多数牵引变电站设置在偏远地区,接入的系统强度偏小时,容易增大牵引负载在电网侧引起的负序电 流[6]。不平衡电流对电力系统的发电、输电、配电以及用电各个方面产生危害,影响电力系统的安全稳定运行[7-9]。因此,许多学者都致力于研究电气化铁路负序电流的抑制方案。
针对电气化铁路的负序问题,平衡变压器可以减轻或消除负序电流。但由于牵引负荷的动态随机性,两相负载功率通常不相等,平衡变压器难以消除电网侧的负序电流,这使其相较于非平衡变压器的优势被削弱[10]。铁路功率调节器(Railway Power Conditioner, RPC)能较好地治理电气化铁路存在的电能质量问题,但因其单位容量成本高昂而限制了推广应用[11]。已有学者致力于优化RPC的设计容量,文献[12]提出了一种计及再生制动能量的铁路功率调节器的柔性功率分配方法,在保证并网相关性能指标的前提下降低RPC的设计容量。文献[13]采用模块化RPC和新型SVC结合的方案减少RPC安装容量,提出了一种考虑再生制动能量反馈的混合铁路功率调节器补偿负序电流。RPC在保证补偿效果的同时降低负序补偿成本,具有一定的工程应用价值[14-15]。
20世纪90年代,美国GE公司提出了基于旋转移相变压器(Rotary Phase Shifting Transformer, RPST)的旋转潮流控制器(Rotary Power Flow Controller, RPFC)[16]。作为一种三相电磁式设备,RPFC响应速度逊于RPC,但在相同设计容量下具有更低的成本,为电气化铁路的负序补偿提供了一种新的思路。文献[17]将统一潮流控制(Unified Power Flow Controller, UPFC)和RPFC进行比较,指出RPFC的优势在于耐冲击能力强、运行损耗小以及造价较低。文献[18]对RPFC的稳态特性进行研究,指出RPFC补偿电压的幅值和相位受其主电路参数和转子角度影响。文献[19]进一步探索RPFC的电压调控能力,指出调节移相角的大小可以间接控制RPFC输出电压的幅值和相位,提出了一种用户侧电压闭环控制策略。RPFC的研究前景较为广阔,有必要探索将RPFC用于高速铁路供电系统的负序补偿方案。
鉴于高速铁路机车为单相交流供电,需要研究一种RPFC的单相拓扑用于其负序治理。文献[20]结合YNd变压器和单相静止无功补偿器(Static Var Generator, SVG)提出一种电气化铁路同相供电综合补偿方案及策略。文献[21]在文献[20]的基础上提出一种新型牵引补偿变压器与单相SVG结合的负序补偿方案和控制策略,降低了SVG的补偿容量,节约投资成本。单相SVG能较好地完成高速铁路牵引供电系统中负序问题的治理,同时也启示了RPFC单相拓扑的建立。
本文在上述分析的基础上提出了单相双旋转移相变压器(Single-phase Dual Rotary Phase Shifting Transformer, S-DRPST),并将S-DRPST应用于采用V/x牵引变压器的高速铁路供电系统。首先分析S-DRPST的拓扑结构及工作原理。其次按照应用场景分析系统电网侧和负载侧电压与电流的相量关系,在得到相量关系的基础上计算两个供电臂补偿电流,进而得到每台S-DRPST输出电压的表达式,并针对移相角提出了柔性合环和协调变速控制。最后通过仿真验证本文所提拓扑结构及补偿策略的可行性和有效性。
S-DRPST主要由2台单相旋转移相变压器(Single-phase Rotary Phase Shifting Transformer, S-RPST)组成,拓扑结构如图1所示。S-RPST的转子绕组作为一次绕组置于外侧连接电源,定子绕组作为二次绕组串联在线路中。一次绕组包括伺服电动机在内的转子驱动装置,伺服电动机可以驱动S-RPST转动一定的机械角度,从而连续调节定子绕组电压的相位,两个定子电压矢量合成作为S-DRPST串联在线路的输出电压。由于S-RPST一般采用多对极,控制过程中只需要转动很小的机械角度即可实现定子电压相位的显著调节。
图1 S-DRPST拓扑结构
Fig.1 Topology of S-DRPST
S-RPST的一次绕组在接通电源后,存在如下关系
 (1)
(1)
式中, 为一次绕组输入电压;
为一次绕组输入电压; 为二次绕组输出电压;k为一、二次绕组的有效匝比;a 为S-RPST定转子电压间的移相角。
为二次绕组输出电压;k为一、二次绕组的有效匝比;a 为S-RPST定转子电压间的移相角。
S-DRPST与RPC的对比见表1。RPC表现出响应速度快、动态调节能力强的特性,其成本主要在于大功率电力电子器件[5]。相比而言,S-DRPST响应速度逊于RPC,单位容量成本较低[16]。考虑S-DRPST和RPC在补偿过程中改变的有功功率和无功功率相同,因此二者设计容量相近。由于S-DRPST本身起到了降压变压器的作用,可直接接入牵引网,在设计体积上略小于RPC。
表1 S-DRPST与RPC的对比
Tab.1 Comparison of S-DRPST and RPC
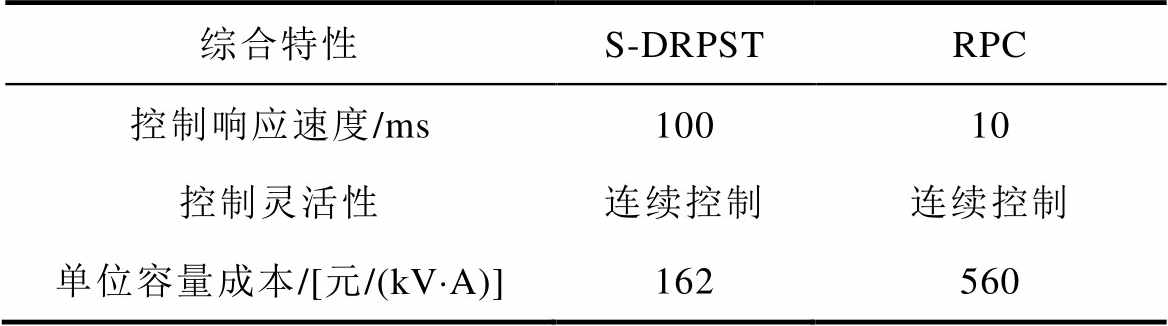
综合特性S-DRPSTRPC 控制响应速度/ms10010 控制灵活性连续控制连续控制 单位容量成本/[元/(kV×A)]162560
根据图1所示的拓扑结构,建立S-DRPST串联在线路时的等效电路如图2所示。其中,和分别为S-DRPST所在线路送端与受端电压; 为转子绕组并联电压;
为转子绕组并联电压; 和
和 分别为两个定子绕组电压;
分别为两个定子绕组电压; 为S-DRPST串联在线路的电压;
为S-DRPST串联在线路的电压; 为S-DRPST所在线路电流;
为S-DRPST所在线路电流; 和
和 分别为线路负载电流与转子绕组总电流;
分别为线路负载电流与转子绕组总电流; 和
和 分别为两个转子绕组电流;Zs1和Zs2分别为2台S-RPST定子绕组阻抗;Zr为S-RPST转子绕组阻抗;k1和k2分别为2台S-RPST定、转子的有效匝比;a1和a2分别为2台S-RPST定转子的移相角。
分别为两个转子绕组电流;Zs1和Zs2分别为2台S-RPST定子绕组阻抗;Zr为S-RPST转子绕组阻抗;k1和k2分别为2台S-RPST定、转子的有效匝比;a1和a2分别为2台S-RPST定转子的移相角。
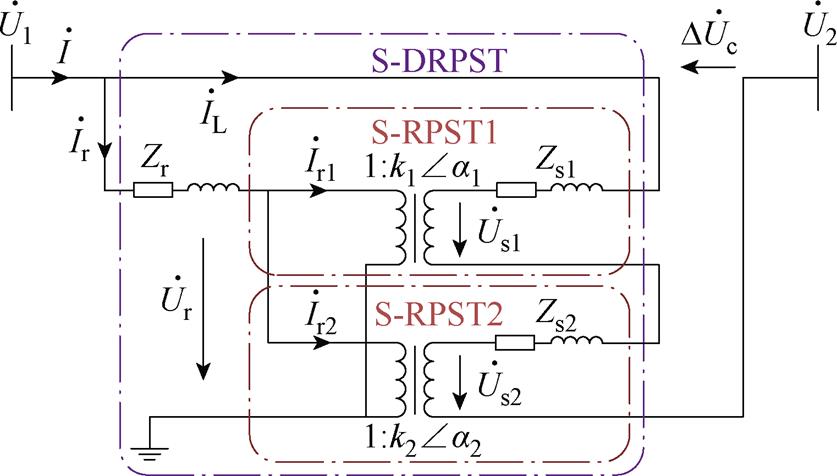
图2 S-DRPST等效电路
Fig.2 Equivalent circuit diagram of S-DRPST
S-RPST一次电压与二次电压和的关系为
 (2)
(2)
认为2台S-RPST定转子的有效匝数比相等,且定子绕组阻抗相同,即k1=k2=k,Zs1=Zs2=Zs。根据图2可得串联电压与所在线路电流的关系为
 (3)
(3)
式中,m为S-DRPST等效绕组匝比;k为S-DRPST定转子等效移相角,m 与k 分别为
 (4)
(4)
式(3)表明线路中S-DRPST可等效为一个受控电压源 与等效阻抗Z串联的形式,其表达式为
与等效阻抗Z串联的形式,其表达式为
 (5)
(5)
 (6)
(6)
S-DRPST的应用场景如图3所示,图中AT表示自耦变压器,T、R、F表示接触线、钢轨、负馈线。电网侧220 kV三相电压经过V/x变压器降压得到负载侧2×27.5 kV的单相电压,为交直交型高速铁路机车提供电能。2台电气参数相同的S-DRPST通过2个相等容抗的电容C1和C2连接到接触线和钢轨,用于实现两供电臂的电流控制。
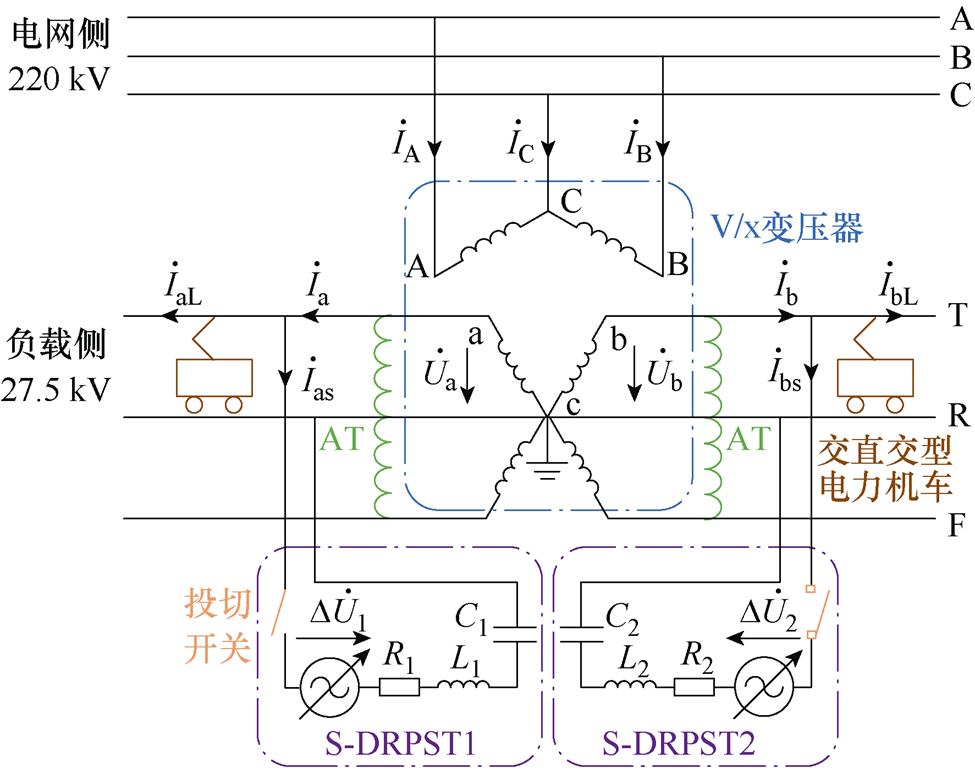
图3 S-DRPST应用场景
Fig.3 Application scenario diagram of S-DRPST
图3中, 和
和 分别表示a相与b相供电臂电压;
分别表示a相与b相供电臂电压; 和
和 分别表示2台S-DRPST输出电压;R1和R2分别表示2台S-DRPST的内电阻;L1和L2分别表示2台S-DRPST的内电感;
分别表示2台S-DRPST输出电压;R1和R2分别表示2台S-DRPST的内电阻;L1和L2分别表示2台S-DRPST的内电感; 、
、 、
、 表示电网侧的A、B、C三相电流;
表示电网侧的A、B、C三相电流; 和
和 分别表示a相与b相供电臂的总电流;
分别表示a相与b相供电臂的总电流; 和
和 分别表示a相与b相供电臂的负载电流;
分别表示a相与b相供电臂的负载电流; 和
和 分别表示a相与b相供电臂的补偿电流。
分别表示a相与b相供电臂的补偿电流。
参照图3给出的参考方向,不考虑交直交型电力机车谐波和无功功率的影响,以电网侧A相电压 为基准,则V/x变压器一次侧与二次侧的电气量满足
为基准,则V/x变压器一次侧与二次侧的电气量满足
 (7)
(7)
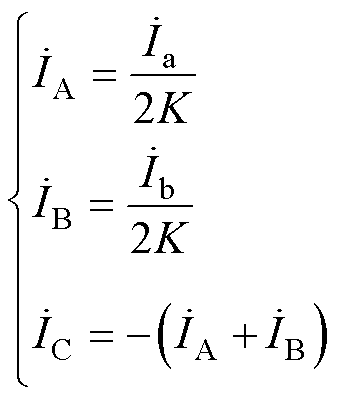 (8)
(8)
式中,K为V/x变压器电压比。
为了衡量S-DRPST的负序补偿性能,使用电压不平衡度作为评估指标,而文献[22]规定三相电力系统的电压不平衡度应低于2%,有
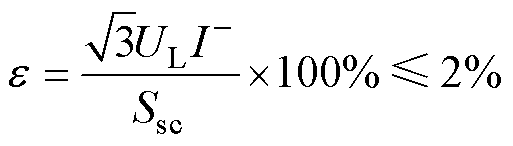 (9)
(9)
式中,UL为电网侧线电压; 为负序电流;Ssc为系统短路容量。
为负序电流;Ssc为系统短路容量。
S-DRPST补偿前,供电臂电流等于电力机车负载电流,其表达式为
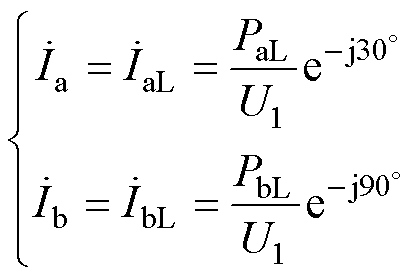 (10)
(10)
式中,PaL和PbL分别为a相与b相供电臂的负载功率,若负载功率大于0,则说明该供电臂从电网侧吸收功率,运行在牵引状态;反之,说明该供电臂给电网侧返送功率,运行在制动状态。
记|PaL|与|PbL|之差为|DPL|,根据补偿前PaL和PbL正、负及绝对值大小,将牵引供电系统分为表2所示的八种运行状态。
表2 牵引供电系统补偿前的运行状态
Tab.2 Operational status of the traction power supply system before compensation
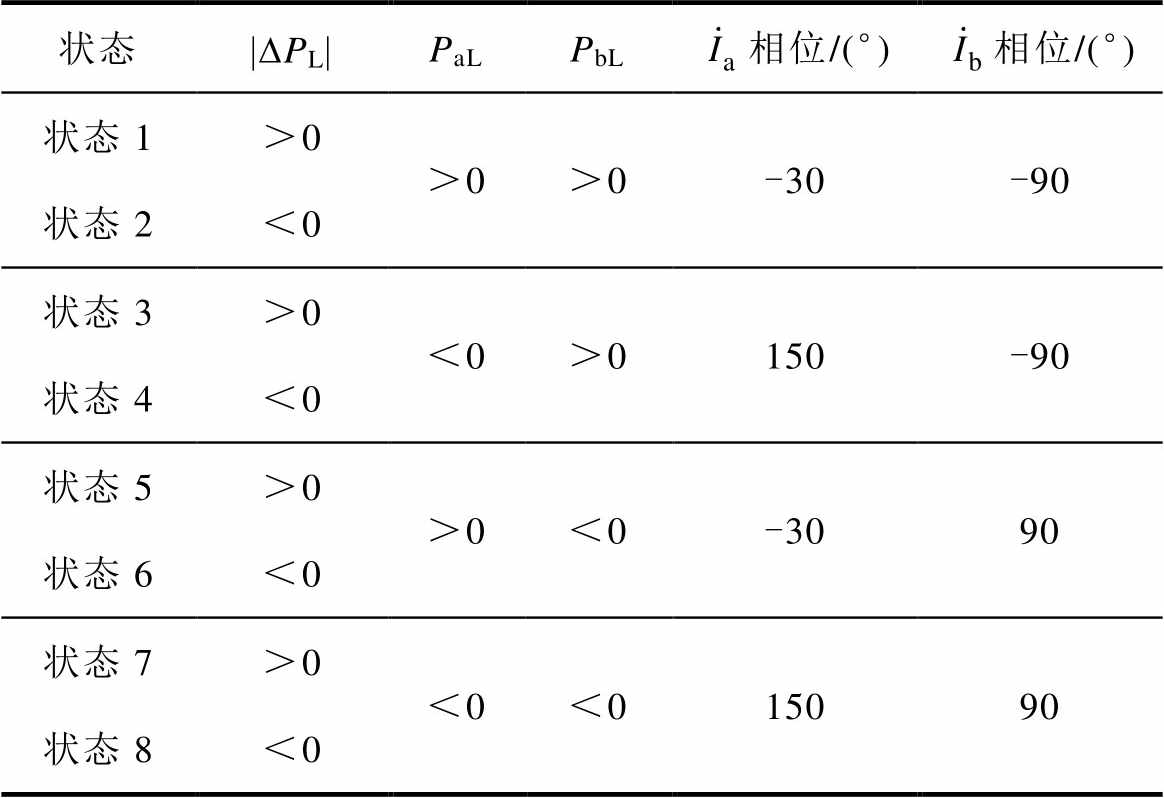
状态|DPL|PaLPbL相位/(°)相位/(°) 状态1>0>0>0-30-90 状态2<0 状态3>0<0>0150-90 状态4<0 状态5>0>0<0-3090 状态6<0 状态7>0<0<015090 状态8<0
以牵引供电系统运行在状态2为例,图4a为补偿前的系统相量图,电网侧三相电流不对称,存在负序电流分量。a相总电流全部为负载电流,在供电臂电压方向下仅存在有功分量 。同理,b相总电流在供电臂电压方向只有有功分量
。同理,b相总电流在供电臂电压方向只有有功分量 。
。
图4b为S-DRPST完全补偿后的系统相量图,2台S-DRPST的电流补偿控制可分为两步:第一步在a相和b相分别补偿有功电流 和
和 ,使有功补偿后两相总电流
,使有功补偿后两相总电流 和
和 大小相等,表达式为
大小相等,表达式为
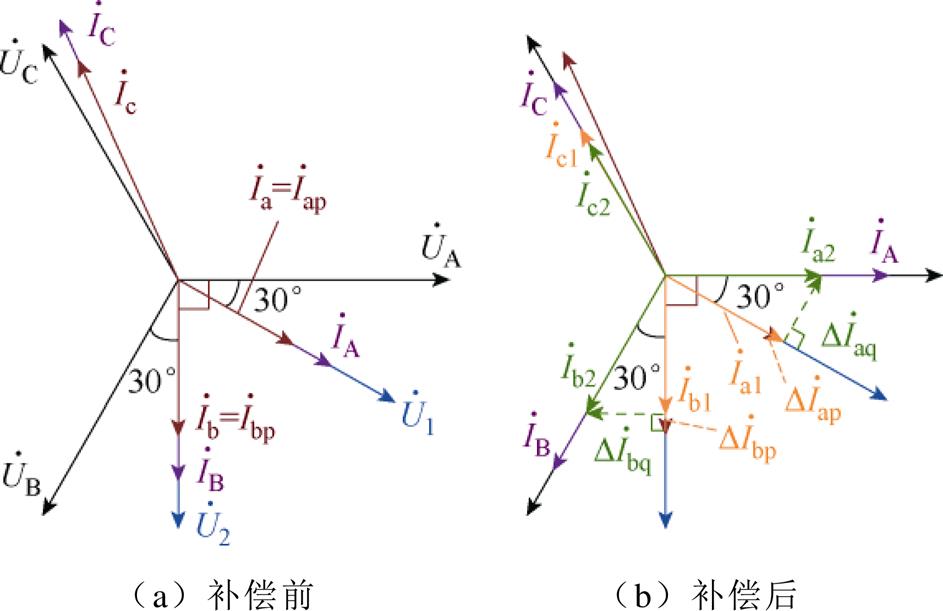
图4 系统在状态2下的相量图
Fig.4 Phase diagram of the system in state 2
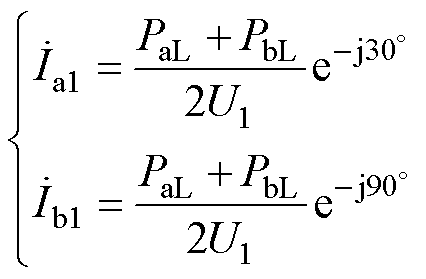 (11)
(11)
第二步在a相和b相分别补偿无功电流 和
和 ,使无功补偿后的两相总电流
,使无功补偿后的两相总电流 超前
超前 120°,此时电网侧三相电流对称,
120°,此时电网侧三相电流对称, 和
和 为
为
 (12)
(12)
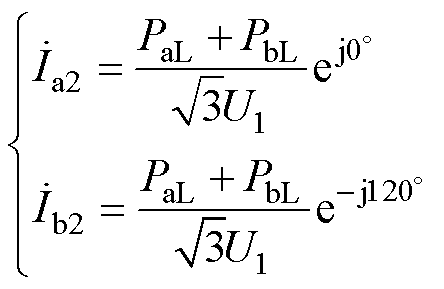
由式(12)和式(13)可知,根据PaL+PbL的正负性,系统在八种运行状态下的补偿过程可以分为如图5所示的两种情况。
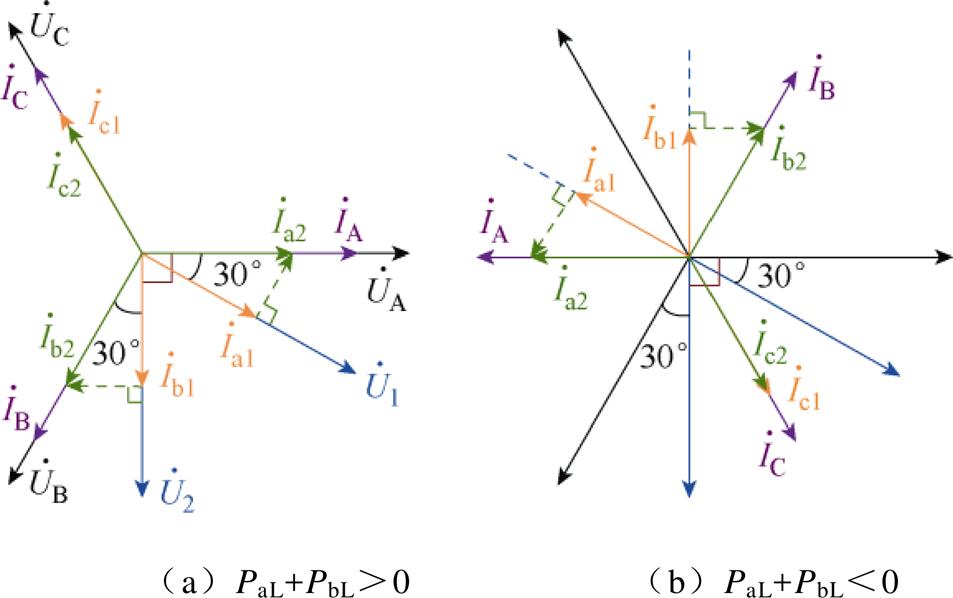
图5 系统的补偿过程
Fig.5 Compensation process of the system
由图5a、图5b所示相量关系可知,S-DRPST两步补偿的总电流 和
和 可表示为
可表示为
 (13)
(13)
基于上述分析可得,不论补偿前牵引供电系统在何种状态下运行,经过S-DRPST两步补偿调整两相供电臂的总电流,进而实现电网侧三相电流对称,消除负序电流。
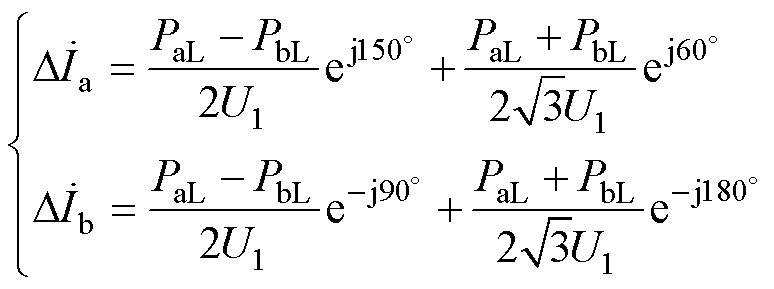
S-DRPST通过调节输出电压,改变所在支路电流,结合图3和式(14),2台S-DRPST提供的输出电压 (i=1, 2)分别为
(i=1, 2)分别为
 (14)
(14)
其中
j1=ej150° j2=e-j90° m1=ej60° m2=e-j180°
下面结合S-DRPST输出电压相量图6进行分析。由式(15)得到各自输出电压的幅值与相位设定值DUseti与qseti,认为每台S-DRPST中两个S-RPST定子侧电压幅值相等,即Usi1=Usi2=Usi,则输出电
压与定子电压 夹角设定值bseti为
夹角设定值bseti为
 (15)
(15)
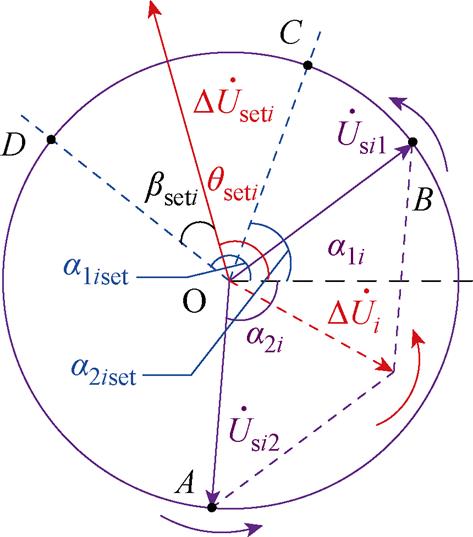
图6 S-DRPST输出电压相量图
Fig.6 Output voltage phase diagram of S-DRPST
S-RPST移相角的设定值a1iset和a2iset分别为
 (16)
(16)
S-RPST的移相过程如图5所示。S-RPST1沿圆弧BCD逆时针调节 使a1i接近设定值a1seti,S-RPST2根据设定值a2seti沿圆弧ABC逆时针调节
使a1i接近设定值a1seti,S-RPST2根据设定值a2seti沿圆弧ABC逆时针调节 的相位a1i,从而控制输出电压的幅值与相位满足设定要求。2台S-DRPST均按照上述过程控制各自的输出电压,进而改变a相和b相的补偿电流,最终实现电网侧三相电流对称。
的相位a1i,从而控制输出电压的幅值与相位满足设定要求。2台S-DRPST均按照上述过程控制各自的输出电压,进而改变a相和b相的补偿电流,最终实现电网侧三相电流对称。
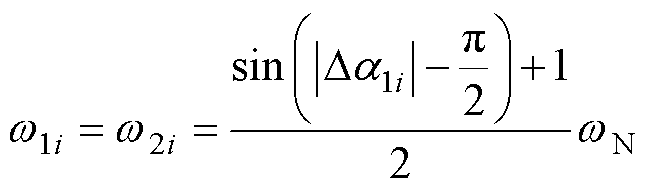
S-RPST移相角控制包括柔性合环和协调变速控制。S-DRPST在投入牵引网补偿高速铁路负序电流前,需要控制两个移相角的大小,减少合环对电网侧电流的冲击。将上述过程称为柔性合环,S-RPST在投入前的移相角 和
和 可表示为
可表示为
 (17)
(17)
式中,Ui和qi分别为供电臂电压 有效值和相位。
有效值和相位。
S-DRPST柔性合环后即可通过伺服电动机控制移相角转动实现负序补偿,当伺服电动机采用固定转速调节时输出电压可能会出现振荡的现象。定转速时的输出电压相量图如图7所示。如图7a所示,2台S-RPST采用固定转速运行,而两个移相角与设定值的偏差Da1i和Da2i通常不相同,因此会出现一台S-RPST移相角到达设定值而另外一台S-RPST继续旋转的情况。根据式(13)可知,另一台S-RPST继续运行会得出新的输出电压设定值,导致原本到达设定值的S-RPST重新运行,造成输出电压的振荡。如图7b所示,定子侧电压旋转至设定值后伺服电动机停止驱动,由于S-RPST具有一定的机械惯性,移相角会出现一定的超调,而在进一步的调节过程中可能出现反向超调的问题,同样造成输出电压振荡。
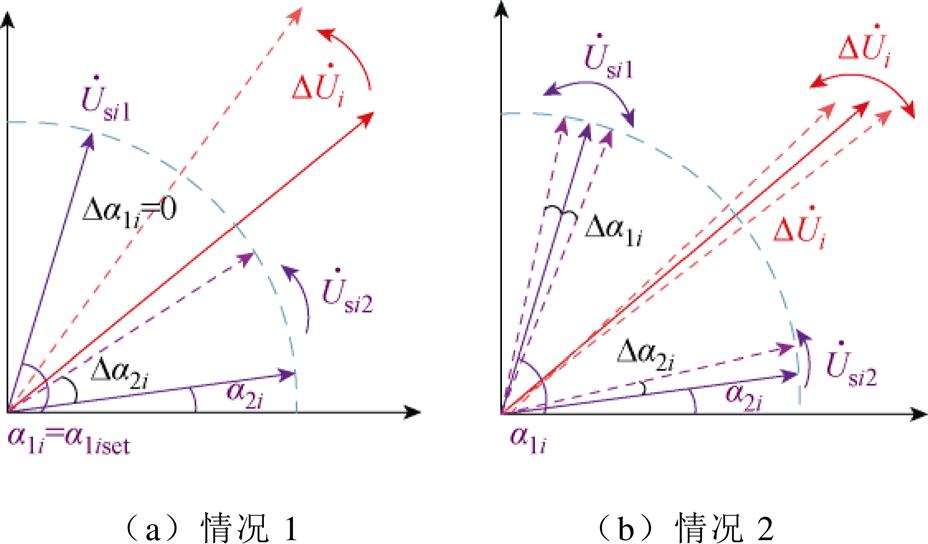
图7 定转速时的输出电压相量图
Fig.7 Output voltage phase diagram for constant speed
基于上述现象,需要对2台S-RPST的移相角进行协调变速控制。协调表现为a1i和a2i同时到达设定值,变速表现在a1i和a2i在接近设定值时降低伺服电动机转速并在达到设定值时停止。
S-RPST转速控制图如图8所示,横坐标表示运行时间t,纵坐标表示2台S-RPST的转速w,则曲线与坐标轴所围面积表示改变的移相角度数。以Da1i>Da2i为例,在移相角协调变速的控制下,2台S-RPST的移相角都在ts时刻到达设定值,并且越靠近设定值转速越慢,有效地避免了输出电压振荡的问题。
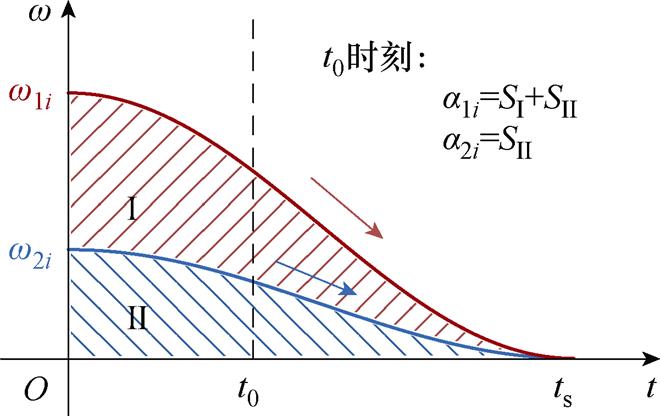
图8 S-RPST转速控制图
Fig.8 Speed control chart of S-RPST
假设伺服电动机的额定转速为wN,当2台S-RPST移相角实际值与设定值的偏差Da1i和Da2i相等且不为0时,则对2台伺服电动机转速w1i和w2i量化处理为
 (18)
(18)
当Da1i>Da2i时,第一台伺服电动机按照wN量化转速,第二台伺服电动机按照Da1i和Da2i的比例量化转速,故2台伺服电动机的转速w1i和w2i可以表示为
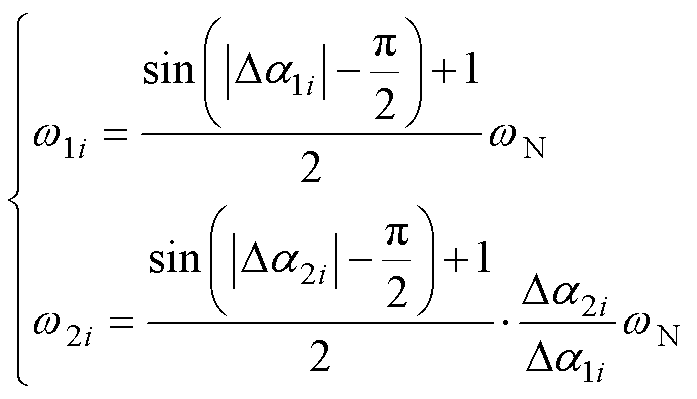 (19)
(19)
同理,当Da1i<Da2i时,2台伺服电动机的转速w1i和w2i可以表示为
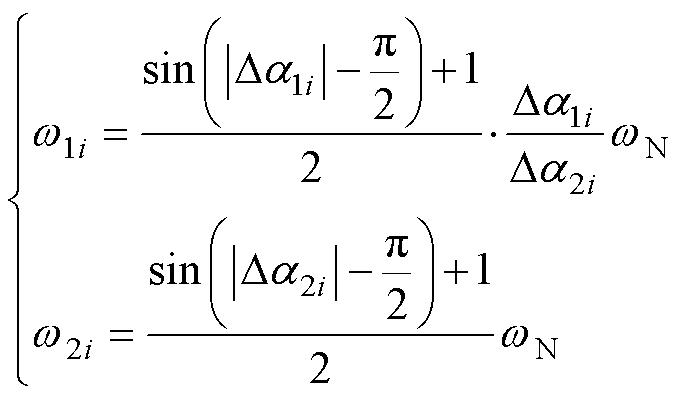 (20)
(20)
S-DRPST的负序补偿策略主要包括如图9所示的4个步骤:首先根据两个供电臂电压计算每台S-DRPST投入前的移相角和,实现补偿设备的柔性合环;其次测量两个供电臂的电流,计算2台S-DRPST所需补偿电压幅值和相位的设定值DUseti和qseti;然后利用式(15)和式(16)计算出每台S-DRPST移相角的设定值a1iset和a2iset,并与同一时刻的实际值a1i和a2i做差得到偏差Da1i和Da2i;最后通过移相角协调变速模块控制伺服电动机的转速,实现每台S-DRPST中两个移相角的控制。
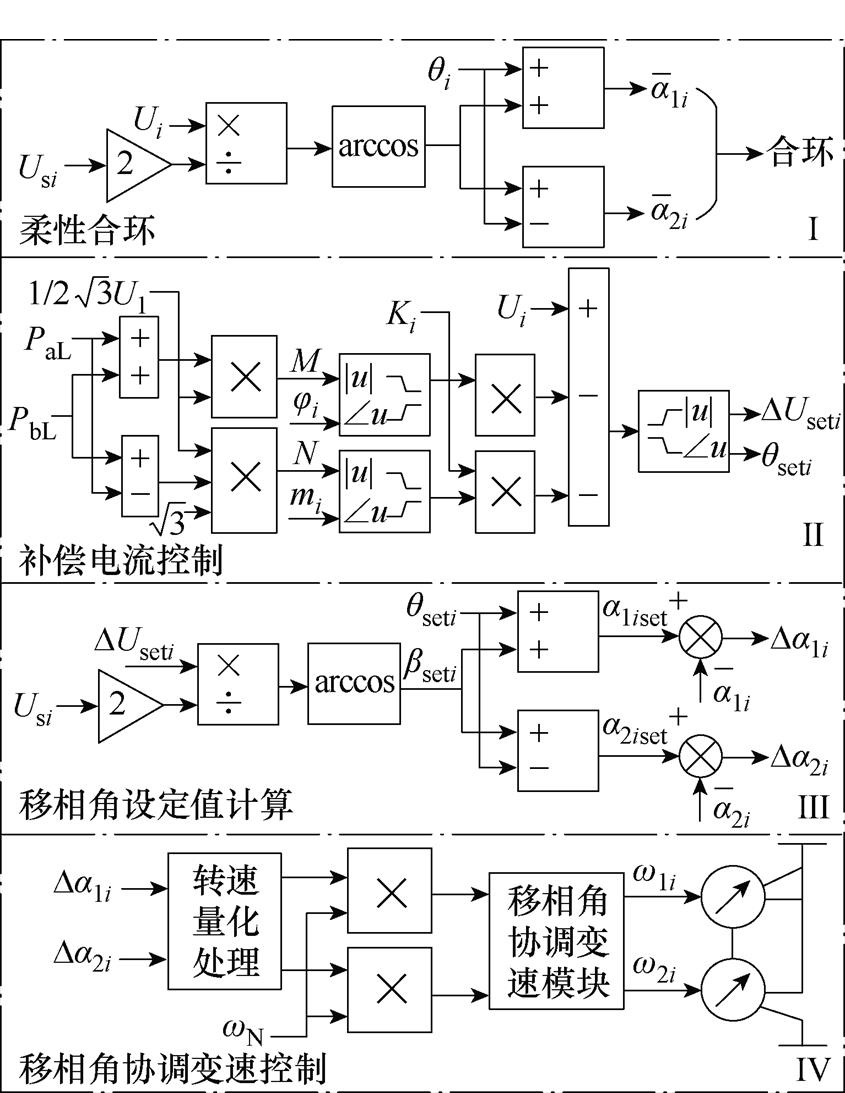
图9 S-DRPST负序补偿策略
Fig.9 Negative sequence compensation strategy of S-DRPST
本文根据图3建立高速铁路供电系统仿真模型,验证所提S-DRPST拓扑结构和控制策略的有效性,其中交直交型电力机车采用理想电流源和电阻并联进行等效。高速铁路供电系统仿真参数见表3。
表3 高速铁路供电系统仿真参数
Tab.3 The relationship between voltages and currents in different intervals
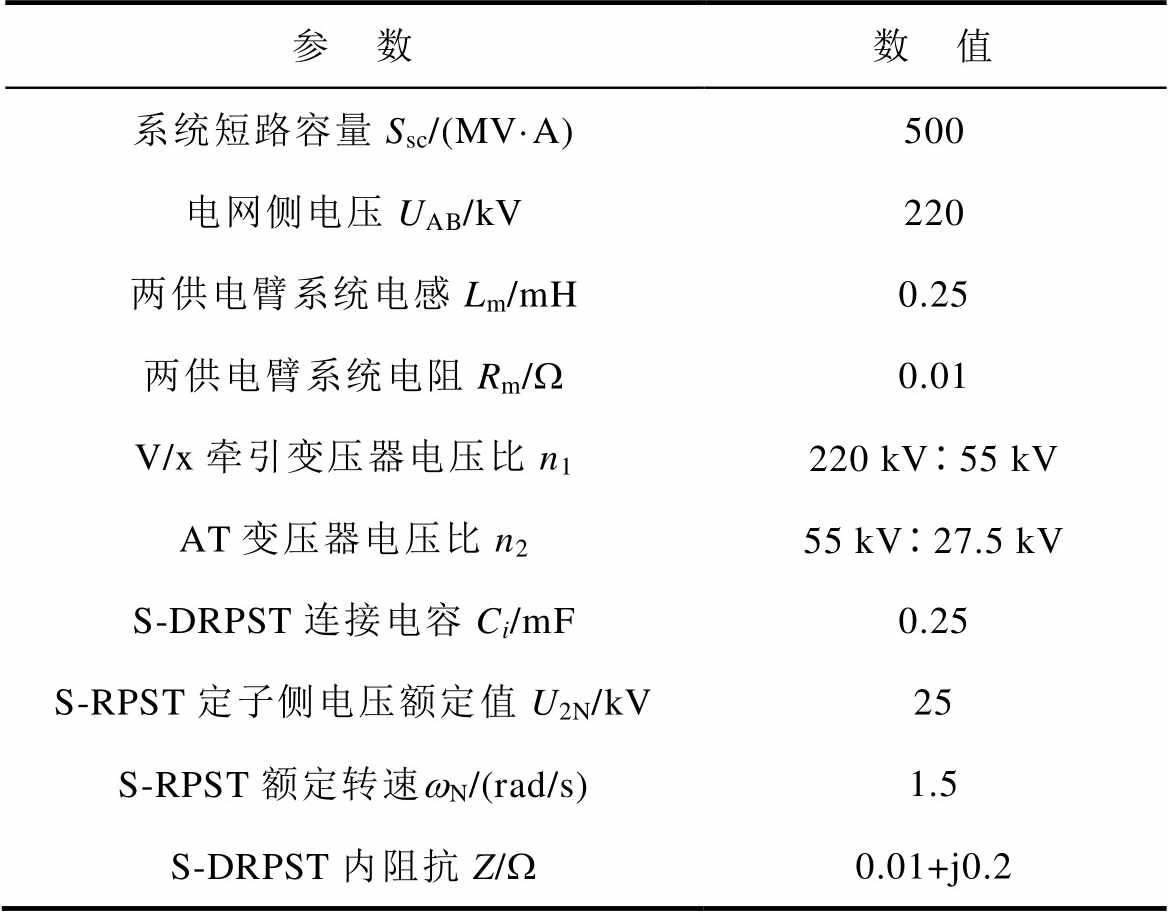
参 数数 值 系统短路容量Ssc/(MV·A)500 电网侧电压UAB/kV220 两供电臂系统电感Lm/mH0.25 两供电臂系统电阻Rm/W0.01 V/x牵引变压器电压比n1220 kV55 kV AT变压器电压比n255 kV27.5 kV S-DRPST连接电容Ci/mF0.25 S-RPST定子侧电压额定值U2N/kV25 S-RPST额定转速wN/(rad/s)1.5 S-DRPST内阻抗Z/W0.01+j0.2
为验证柔性合环的效果,在牵引负载不对称的情况下投入S-DRPST进行负序补偿仿真。此处设置a相负载功率为25 MW,b相负载功率为0 MW,在0.05 s和0.10 s分别投入和运行补偿装置,仿真结果如图10和图11所示。
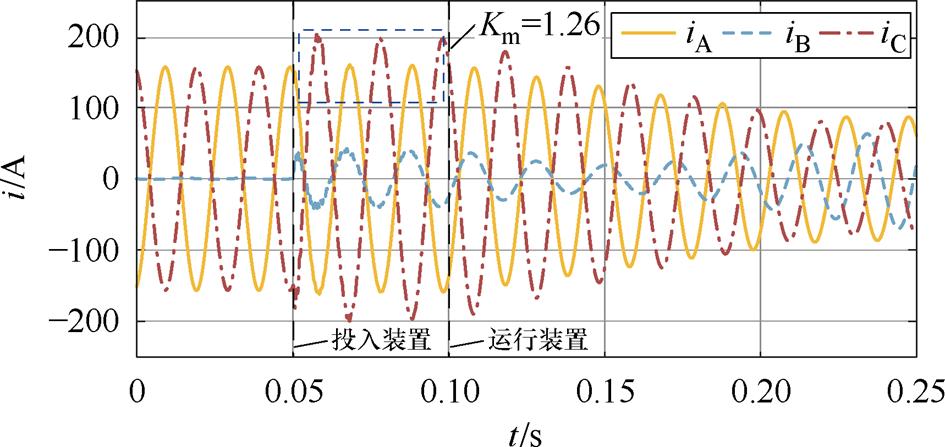
图10 直接合环时的仿真结果
Fig.10 Simulation results for direct loop closing
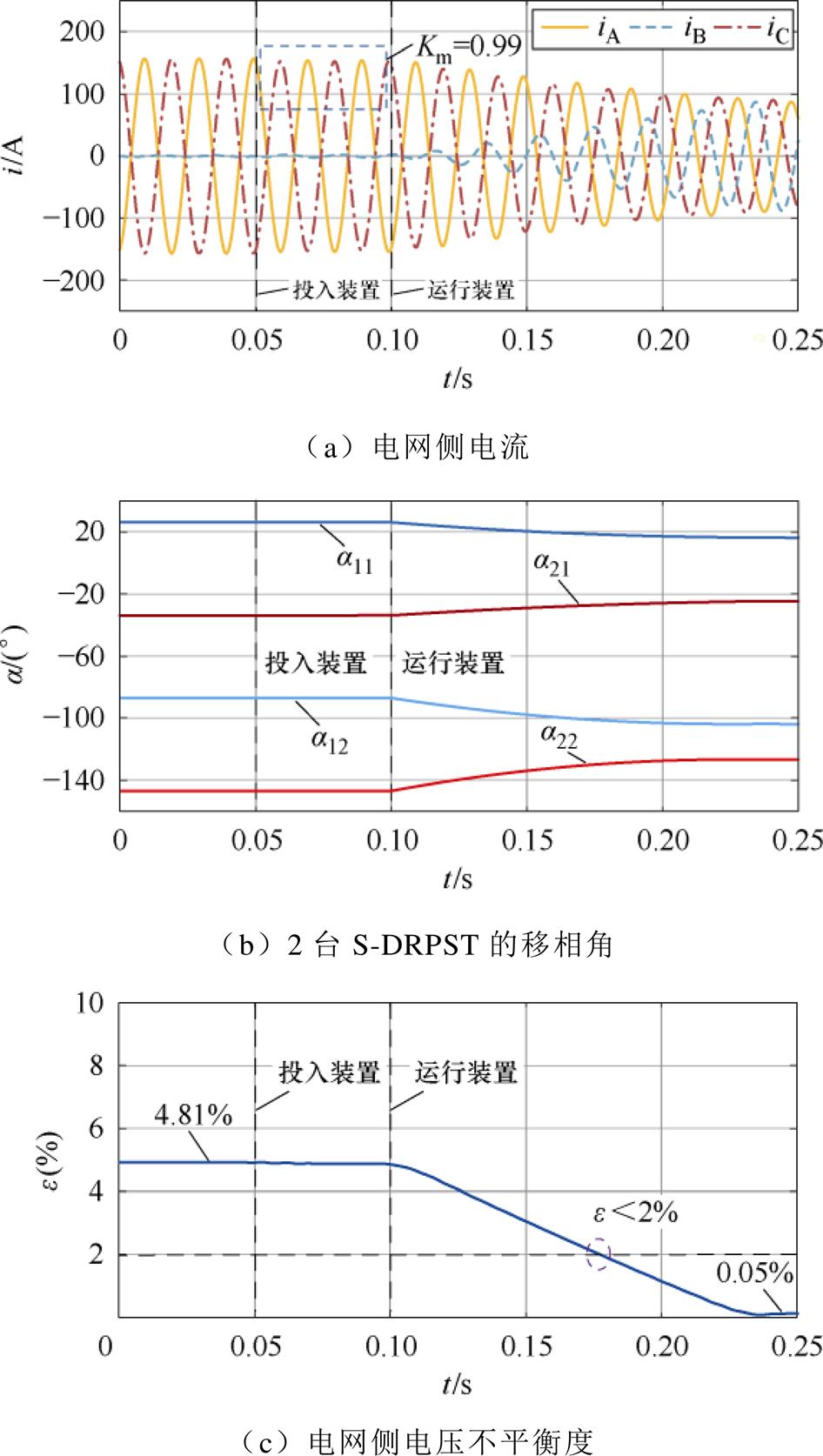
图11 柔性合环的仿真结果
Fig.11 Simulation results for flexible loop closing
记最大电流相投入装置前后的电流幅值为Im1和Im2,采用冲击系数Km=Im2/Im1描述S-DRPST合环为电网侧带来的电流冲击。根据图10可得,S-DRPST不进行移相角控制直接合环时Km=1.26,会在网侧造成较大的冲击电流。而图11a表明柔性合环能将Km降低至0.99,实现补偿装置的平稳投入。投入S-DRPST前B相电流为0,A相电流和C相电流较大,投入后运行补偿装置,电流经过约0.1 s的过渡后波形趋于三相对称。由图11b可见,在移相角协调变速模块的作用下,2台S-DRPST的移相角越靠近设定值变化速度越慢,并且每台S-DRPST的两个移相角最后同时达到设定值,达到了预期效果。图11c为电网侧电压不平衡度,在运行补偿装置后,电压不平衡度从4.81%降低到了0.05%,负序电压基本被消除。仿真结果表明,该装置在牵引负载不对称的情况下,仍能平稳地投入牵引网并且补偿负序电流。
考虑供电臂有牵引和制动两种运行状态,根据两相供电臂功率的正负性将仿真分为三种工况:工况1:PaL=-5 MW,PbL=-10 MW;工况2:PaL=15MW,PbL=-5MW;工况3:PaL=20MW,PbL=10MW。
两相供电臂运行状态改变时,仿真结果如图12所示。S-DRPST全程在牵引网运行,通过两对移相角的协调变速控制,使a、b两相供电臂电流幅值差减小,相位变化。不论供电臂运行在何种状态,S-DRPST均能将稳态电压不平衡度控制在0.1%以内,平衡电网侧三相电流。
由于高铁负载的波动性[11],a相和b相在不同时刻的牵引功率不同,为验证装置在牵引负载快速连续变化时的响应效果,负载波动情况如图13所示,图14为仿真结果。其中S-DRPST一直投入运行。
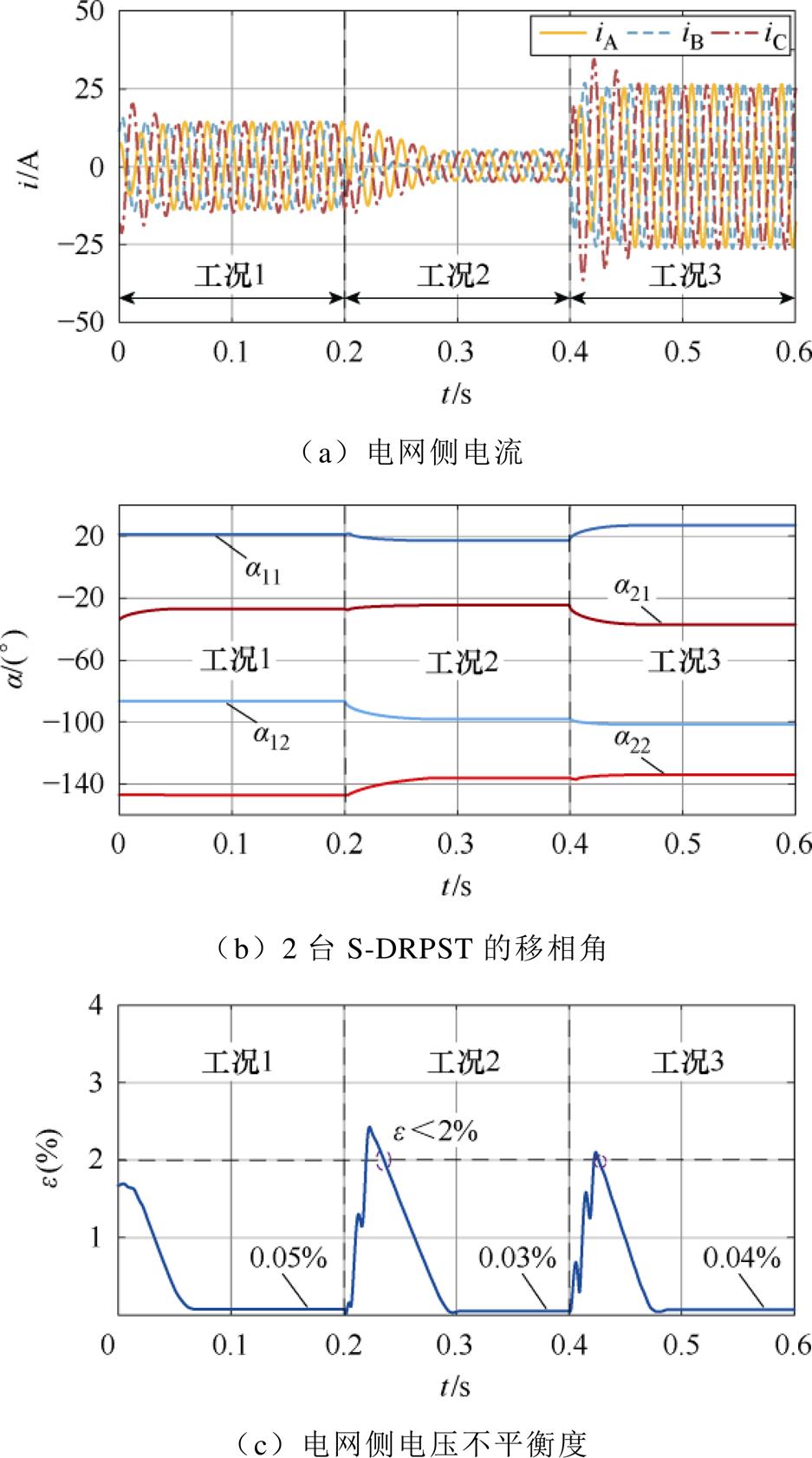
图12 计制动状态下的仿真结果
Fig.12 Simulation results under braking condition
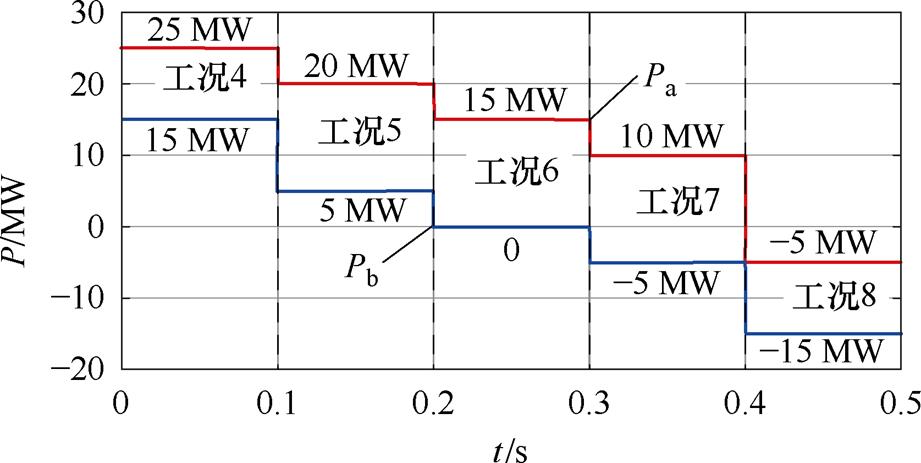
图13 负载波动情况
Fig.13 Load fluctuations
由图14a可得,S-DRPST在负载波动下调节电网侧电流快速过渡到稳态,具有良好的补偿效果。图14b说明随着负载的快速连续变化,移相角协调变速模块仍能起到预期的调节效果。各个工况之间移相角所需改变的幅度小,因而S-DRPST在额定转速下具有较快的补偿速度。由图14c可得,S-DRPST可以适应负载的变化及时做出调整,在100 ms以内将电压不平衡度控制在2%以下。
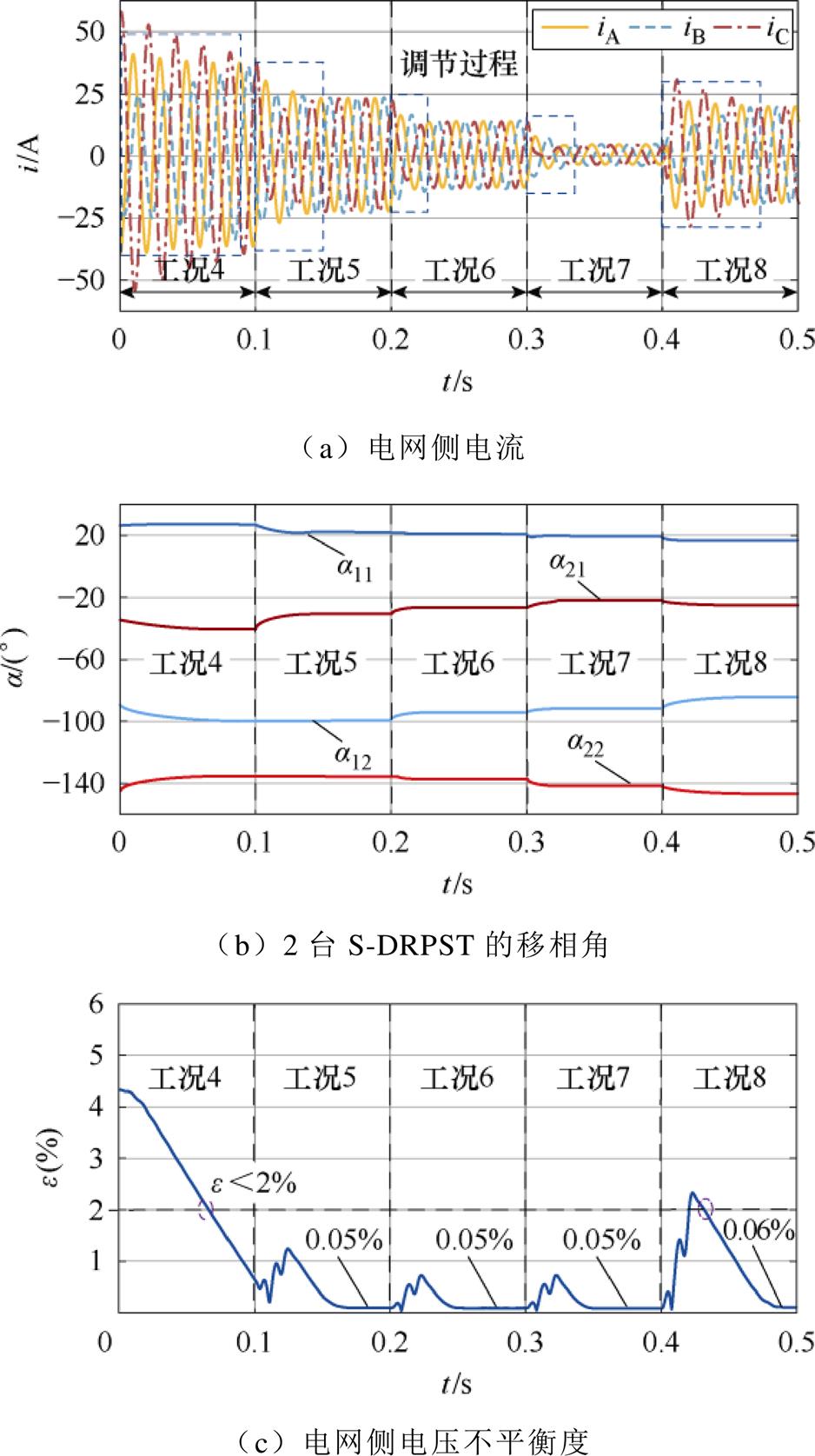
图14 动态响应特性仿真结果
Fig.14 Simulation results of dynamic response characteristics
本文采用S-DRPST解决高速铁路供电系统中的负序问题,提出了一种基于V/x变压器的负序电流补偿策略,仿真证明了S-DRPST的补偿效果并得出结论如下:
1)在采用V/x牵引变压器的高速铁路供电系统中,S-DRPST可调节移相角的大小输出一个幅值与相位均连续可调的补偿电压,从而改变供电臂总电流,实现电网侧电流对称。
2)S-DRPST的移相角控制包括柔性合环和协调变速控制,柔性合环减小了补偿设备投入带来的冲击电流,协调变速控制抑制调节过程中输出电压的振荡。
3)考虑供电臂牵引状态和制动状态的情况下,S-DRPST均能控制电网侧电流快速到达稳态并趋于三相对称,具有良好的调节效果。
4)当高速铁路负载功率快速连续波动时,S-DRPST能及时响应负载电流变化,调节移相角作出相应的负序电流补偿。同时本文提出的S-DRPST属于电磁式设备,单位容量成本优势明显,适用于既有的牵引供电系统,为高速铁路负序问题的治理提供了一种新思路。
参考文献
[1] 高扬, 朱宇, 齐彦昆, 等. 信息技术在铁路安全监督管理中的应用[J]. 中国铁路, 2023(9): 27-33.
Gao Yang, Zhu Yu, Qi Yankun, et al. Application of information technology in railway safety supervision and management[J]. China Railway, 2023(9): 27-33.
[2] 周净轩, 罗隆福, 王海龙. 基于双星型多电平潮流控制器与YNvd变压器的同相供电系统[J]. 电力系统保护与控制, 2019, 47(8): 9-16.
Zhou Jingxuan, Luo Longfu, Wang Hailong. Co-phase power supply system based on double star multilevel power flow controller and YNvd transformer[J]. Power System Protection and Control, 2019, 47(8): 9-16.
[3] Lu Qiwei, He Bangbang, Gao Zhixuan, et al. An optimized regulation scheme of improving the effective utilization of the regenerative braking energy of the whole railway line[J]. Energies, 2019, 12(21): 4166.
[4] Zhang Dinghua, Zhang Zhixue, Wang Weian, et al. Negative sequence current optimizing control based on railway static power conditioner in V/v traction power supply system[J]. IEEE Transactions on Power Electronics, 2016, 31(1): 200-212.
[5] 肖非然, 倪周, 闵永智, 等. 一种基于多智能体的多站协同高速铁路不平衡补偿方法[J]. 电工技术学报, 2020, 35(16): 3518-3528.
Xiao Feiran, Ni Zhou, Min Yongzhi, et al. Unbalanced compensation method of multi-station cooperative for high-speed railway based on multi- agent[J]. Transactions of China Electrotechnical Society, 2020, 35(16): 3518-3528.
[6] 张建辉, 许莹莹, 李云丰. 交流电网不平衡下铁路功率调节器负序电流完全补偿策略研究[J]. 中国电机工程学报, 2020, 40(10): 3144-3154.
Zhang Jianhui, Xu Yingying, Li Yunfeng. Completed compensation strategy research of railway power conditioner for negative-sequence current under unbalanced AC power grids[J]. Proceedings of the CSEE, 2020, 40(10): 3144-3154.
[7] 张光儒, 杨勇, 刘丽娟, 等. 光伏电站送出线路零序保护异常动作分析[J]. 电气技术, 2019, 20(1): 93-96.
Zhang Guangru, Yang Yong, Liu Lijuan, et al. Analysis of zero sequence protection action abnormally for photovoltaic power station transmission line[J]. Electrical Engineering, 2019, 20(1): 93-96.
[8] Roudsari H M, Jalilian A, Jamali S. Flexible fractional compensating mode for railway static power conditioner in a V/v traction power supply system[J]. IEEE Transactions on Industrial Elec- tronics, 2018, 65(10): 7963-7974.
[9] 罗忠游, 赵普志, 段玉, 等. 电气化铁路接入风电汇集地区电网的负序优化补偿策略研究[J]. 电力系统保护与控制, 2023, 51(19): 124-134.
Luo Zhongyou, Zhao Puzhi, Duan Yu, et al. A negative sequence optimization compensation strategy for an electrified railway connected to wind power integration areas[J]. Power System Protection and Control, 2023, 51(19): 124-134.
[10] Ding Hongqi, Ma Fujun, Han Rong, et al. Junction temperature optimization based compensation strategy of modular multilevel railway power conditioner[J]. IEEE Transactions on Power Electronics, 2022, 37(6): 6585-6598.
[11] 王鹏程, 李勇, 安柏楠, 等. 基于不对称接线平衡变压器的电气化铁路电能质量混合调节系统[J]. 电工技术学报, 2019, 34(21): 4590-4600.
Wang Pengcheng, Li Yong, An Bonan, et al. Asymmetrical connection balance transformer based hybrid power quality control system for electrical railway[J]. Transactions of China Electrotechnical Society, 2019, 34(21): 4590-4600.
[12] 何棒棒, 高志宣, 马超, 等. 一种考虑再生制动能量反馈的混合铁路功率调节器[J]. 电源学报, 2023, 21(2): 106-115.
He Bangbang, Gao Zhixuan, Ma Chao, et al. Hybrid railway power conditioner considering regenerative braking energy feedback[J]. Journal of Power Supply, 2023, 21(2): 106-115.
[13] 林锦杰, 李勇, 胡斯佳, 等. 计及再生制动能量的铁路潮流控制器功率柔性分配方法[J]. 电工技术学报, 2023, 38(22): 6121-6132.
Lin Jinjie, Li Yong, Hu Sijia, et al. Flexible power assignment method for railway power flow controller considering regenerative braking energy[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(22): 6121-6132.
[14] 张永胜. 基于Matlab和YALMIP的V/v型牵引供电系统负序电流优化方法[J]. 电气技术, 2020, 21(2): 44-49.
Zhang Yongsheng. Negative sequence current optimi- zation of V/v traction power supply system based on Matlab platform and YALMIP toolbox[J]. Electrical Engineering, 2020, 21(2): 44-49.
[15] 江友华, 房明硕, 王文吉, 等. 铁路功率调节器过渡态出力配置及控制策略研究[J]. 中国电机工程学报, 2020, 40(19): 6294-6308.
Jiang Youhua, Fang Mingshuo, Wang Wenji, et al. Research on output configuration and control strategy of railway power conditioner in transition state[J]. Proceedings of the CSEE, 2020, 40(19): 6294-6308.
[16] 颜湘武, 彭维锋, 贾焦心, 等. 基于转速自适应控制的旋转潮流控制器功率调节方法研究[J]. 中国电机工程学报, 2023, 43(13): 4971-4987.
Yan Xiangwu, Peng Weifeng, Jia Jiaoxin, et al. Research on power regulation method of rotary power flow controller based on speed adaptive control[J]. Proceedings of the CSEE, 2023, 43(13): 4971-4987.
[17] 谭振龙, 张春朋, 姜齐荣, 等. 旋转潮流控制器与统一潮流控制器和Sen Transformer的对比[J]. 电网技术, 2016, 40(3): 868-874.
Tan Zhenlong, Zhang Chunpeng, Jiang Qirong, et al. Comparative research on rotary power flow controller, unified power flow controller and Sen Transformer[J]. Power System Technology, 2016, 40(3): 868-874.
[18] 谭振龙, 张春朋, 姜齐荣, 等. 旋转潮流控制器稳态特性研究[J]. 电网技术, 2015, 39(7): 1921-1926.
Tan Zhenlong, Zhang Chunpeng, Jiang Qirong, et al. Study on steady state characteristics of rotary power flow controller[J]. Power System Technology, 2015, 39(7): 1921-1926.
[19] 颜湘武, 彭维锋, 邵晨, 等. 基于旋转潮流控制器的用户侧电压调控方法[J]. 电工技术学报, 2023, 38(增刊1): 70-79, 113.
Yan Xiangwu, Peng Weifeng, Shao Chen, et al. User-side voltage regulation method based on rotary power flow controller[J]. Transactions of China Electrotechnical Society, 2023, 38(S1): 70-79, 113.
[20] 王辉, 李群湛, 解绍锋, 等. 基于Dd接线变压器及静止无功发生器的电气化铁路同相供电综合补偿方案[J]. 中国铁道科学, 2020, 41(4): 116-126.
Wang Hui, Li Qunzhan, Xie Shaofeng, et al. Comprehensive compensation scheme of cophase power supply for electrified railway with Dd trans- former and static var generator[J]. China Railway Science, 2020, 41(4): 116-126.
[21] 王辉, 李群湛, 解绍锋, 等. 基于一种新型牵引补偿变压器的牵引变电群贯通供电系统负序补偿[J]. 电工技术学报, 2021, 36(10): 2140-2152.
Wang Hui, Li Qunzhan, Xie Shaofeng, et al. Compensation of interconnected power supply system of traction substation group based on a new type of traction compensation transformer[J]. Transactions of China Electrotechnical Society, 2021, 36(10): 2140- 2152.
[22] 国家质量监督检验检疫总局, 中国国家标准化管理委员会. 电能质量 三相电压不平衡: GB/T 15543- 2008[S]. 北京: 中国标准出版社, 2009.
Abstract The AC-DC-AC electric locomotive with four-quadrant pulse width modulation (PWM) control is gradually becoming the main type. Compared with traditional AC-DC electric locomotives, it alleviates reactive power and low-order harmonic problems of electrified railways. However, the increase in traction power exacerbates the negative sequence problem of the power grid. Therefore, referring to the structure of the rotary power flow controller (RPFC) and static var generator (SVG), a new negative-sequence compensation topology based on a single-phase dual rotary phase shifting transformer (S-DRPST) is proposed to suppress the unbalanced currents caused by traction loads on the grid side.
Firstly, S-DRPST is mainly composed of two single-phase rotary phase shifting transformers, which change the phase angle between the stator and rotor voltages by driving the S-RPST to rotate through a servo motor. The secondary side combines the two stator voltage vectors to form the output voltage of S-DRPST in series with the line, and changing the amplitude and phase of the output voltage can effectively control the line current of S-DRPST.
Then, the S-DRPST negative sequence compensation strategy is studied in the application scenario of V/x traction power supply system. Considering the traction and braking states of the electric train load, the amplitude and phase of the output voltage of two S-DRPSTs are calculated based on the power of the supply arm, and then the set value of the phase shift angle is obtained. At the same time, the phase shift angle control of a single S-DRPST is designed using flexible coupling before the compensation equipment is put into operation. After the equipment is put into operation, the coordinated variable-speed control for phase shift angle is adopted to suppress the output voltage oscillations.
Finally, a simulation model of the high-speed railway power supply system is established to verify the proposed S-DRPST topology and control strategy. The results show that the S-DRPST in the closed-loop scenario can flexibly reduce the impact current on the traction network, decreasing the impact coefficient from 1.26 to 0.99. Considering the traction and braking states of the power supply arm throughout the operation, the unbalanced voltages under different operating conditions are controlled to be below 0.1%. In scenarios where the traction load changes rapidly and continuously, the S-DRPST can respond promptly to compensate for negative-sequence currents, keeping the voltage imbalance within 2% in less than 100 ms.
The conclusions are as follows. (1) S-DRPST can adjust the phase shift angle in the V/x traction power supply system to change the total current of the supply arm and achieve a symmetrical current on the grid side. (2) In the phase shift angle control of S-DRPST, flexible coupling reduces the impact current caused by the compensation equipment, and the coordinated variable-speed control suppresses output voltage oscillations during the adjustment process. (3) S-DRPST controls the grid-side current to be three-phase symmetrical by considering the traction and braking states of the supply arm. (4) S-DRPST can respond promptly to rapid and continuous power fluctuations of high-speed railway loads and provide corresponding compensation. The proposed S-DRPST is an electromagnetic device with obvious advantages in unit capacity cost, which is suitable for existing traction power supply systems and addresses the negative sequence problem in high-speed railways.
keywords:High-speed railway power supply system, single-phase dual rotary phase shifting transformer, negative sequence current compensation, control of phase shift angle
DOI: 10.19595/j.cnki.1000-6753.tces.231863
中图分类号:TM922
国家自然科学基金资助项目(52207102)。
收稿日期 2023-11-08
改稿日期 2024-04-26
颜湘武 男,1965年生,教授,博士生导师,研究方向为新能源电力系统分析与控制、现代电力变换、新型储能与节能技术。E-mail: xiangwuy@ncepu.edu.cn
李秉桢 男,2000年生,硕士研究生,研究方向为新能源电力系统分析与控制。E-mail: bingzhenl@ncepu.edu.cn(通信作者)
(编辑 郭丽军)