图1 应用于AGV的WPT系统示意图
Fig.1 The schematic diagram of WPT system applied to AGV
摘要 在自动导引小车(AGV)中采用无线电能传输(WPT)可以提高AGV充电及搬运效率。相比于电动汽车,AGV的导航系统为WPT的应用增加了新的挑战。为降低系统的复杂性和成本,该文提出一种无线充电线圈结构:DAD线圈,该线圈既可以实现无线供电,又可以实现偏移检测。首先,结合DAD线圈的气隙磁场分布,对比方形线圈结构,分析DAD线圈导航和供电的原理;然后,对采用LCC-S型补偿拓扑的DAD线圈进行建模分析,提出具有耦合机构输出电压不受负载影响的谐振元件参数配置条件,进而给出耦合机构的电压增益、输出功率与传输效率表达式;最后,为验证所提出的 DAD 耦合机构偏移检测性能和系统传输特性,搭建30 mm间距的400 W无线充电样机装置,对DAD线圈的导航性能与供电性能进行了验证,在偏移范围为(-50~+50) mm之间,DAD线圈可以指示偏移方向与偏移大小,且效率波动在5%范围内,可以实现稳定的电能传输。
关键词:自动导引小车(AGV) 无线电能传输(WPT) 线圈 导航
随着“智能制造”“工业4.0”等概念的提出,自动导引小车(Automated Guided Vehicle, AGV)广泛应用于制造业、仓储物流中。2022年,中国工业应用自主移动机器人(Autonomous Mobile Robot, AMR)销售数量为93 000台(含销往海外市场),较2021年增长29.17%,市场规模达到185亿元,同比增长46.82%[1]。
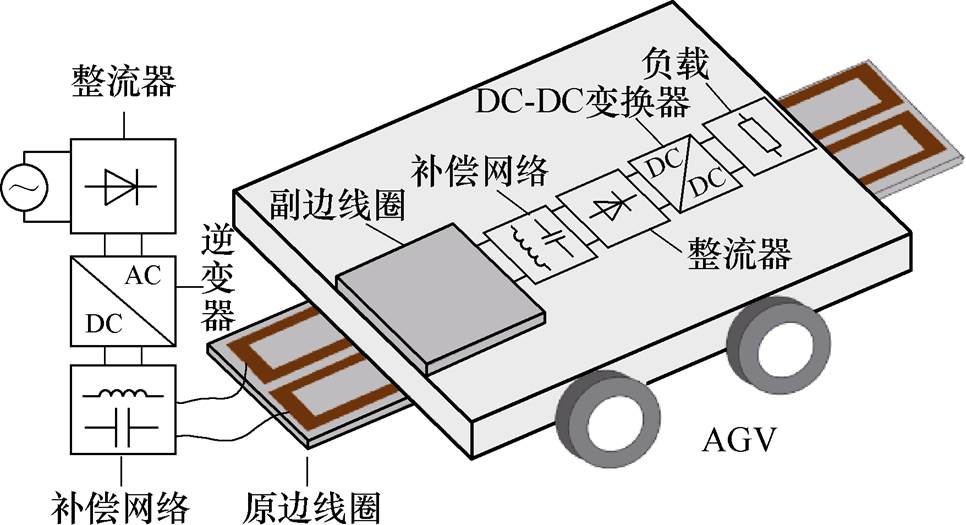
AGV通常采用电池驱动,充电方式主要有三种:手动充电、充电桩充电和无线充电。手动充电自动化程度低,正逐渐被淘汰。目前大多数AGV采用的是自动充电,需要到指定的充电桩进行较长时间的充电,此充电过程会造成工作任务的停滞,导致AGV工作效率降低,并且自动充电插口的插拔也易引起电火花,带来安全隐患。无线电能传输(Wireless Power Transfer, WPT)近几年发展迅速,目前其实验最高效率已可达到96%[2],虽然相比于充电桩充电效率仍然偏低,但其具有方便灵活、不易受环境影响、无需插拔、充电安全等优点[3-5],在交通运输、医疗器械、便携通信和航空航天等方面得到了广泛的应用[6-7]。无线充电技术的可移动性强,可在AGV工作期间或者行走过程中对其进行充电,节约充电时间;同时动态无线充电的使用还可有效解决储能装置容量限制问题,延长AGV的续航里程,具有广阔的应用前景[8-11]。应用于AGV的WPT系统示意图如图1所示。
图1 应用于AGV的WPT系统示意图
Fig.1 The schematic diagram of WPT system applied to AGV
目前,对无线充电技术的研究主要集中在对耦合机构的设计[12-15]和供电策略的研究[16-18],研究目标一般为提高系统供电效率与供电稳定性,主要以电动汽车为研究对象,对应用于AGV的WPT研究较少。文献[19]提出了一种基于副边位置监测的三相逆变器不平衡电流控制方法,与平衡电流控制系统相比,所提出的控制系统可以提高传输效率。文献[20]采用粒子群优化算法对W型线圈结构参数进行了优化,在AGV运动过程中实现了1.8 kW的稳定输出功率,整个系统的效率达到了92.7%。文献[21]提出了一种基于T/S拓扑的参数设计方法,以保持输出电流的稳定。
针对WPT系统而言,在电动汽车与AGV应用场景下的研究大多可相互借鉴,但AGV自身必需的导航系统为WPT的应用带来了新的挑战。按照导航原理分类,目前AGV主要采用磁条、二维码、激光、电磁四种导航方式进行导航。其中,二维码导航方式中的导航二维码容易磨损,需要定期维护;激光导航方式成本较高,对周围环境(如光线、地面条件等)要求相对苛刻;磁条与电磁导航的方式技术成熟、成本较低,是实际中AGV最常采用的导航方式,但需要加装额外的磁体或导线,与WPT系统中的原、副边磁场易相互干扰。目前对AGV导航的研究集中在导航算法的改进上[22-23],对导航的硬件实现关注较少,更少有文献关注无线充电与导航系统的互相干扰问题。文献[24]提出了一种应用于AGV的将导航与无线充电结合的MAC(move- and-charge)系统,通过接收侧电流反映AGV偏移程度进行导航,同时在30 mm导航范围内能保持85%以上的效率,但该系统无法识别AGV偏移方向,不能用于实际导航。
本文提出了一种应用于AGV动态无线充电系统的导航与供电一体化DAD线圈结构,该线圈既可以实现WPT系统中的电能传输,又能通过输出电压检测AGV的横向偏移量,后续AGV车载控制器通过对偏移量的读取与分析,发出控制AGV驱动系统的指令,实现完整的导航循迹过程。该线圈结构避免了导航与供电的相互影响,同时还能降低AGV系统的成本和复杂性。
本文首先结合DAD线圈的磁场分布情况,对导航与供电原理进行了说明,提出具有耦合机构输出电压不受负载影响的谐振元件参数配置条件;然后给出耦合机构的电压增益、输出功率与传输效率;最后搭建了30 mm间距的400 W实验样机,在偏移距离为 (-50~+50) mm的范围内,对DAD线圈的导航性能与供电性能进行了验证。
图2所示为采用DAD线圈的WPT系统电路,含工频整流器(Ⅰ)、全桥逆变器(Ⅱ)、LCC/S补偿拓扑(Ⅲ)、DAD线圈(Ⅳ)、整流滤波电路(Ⅴ)、Buck变换器(Ⅵ)6个部分。经设计,Buck变换器输入电压UL在65~105 V之间变化时,可实现48 V恒压输出,输出功率为400 W。
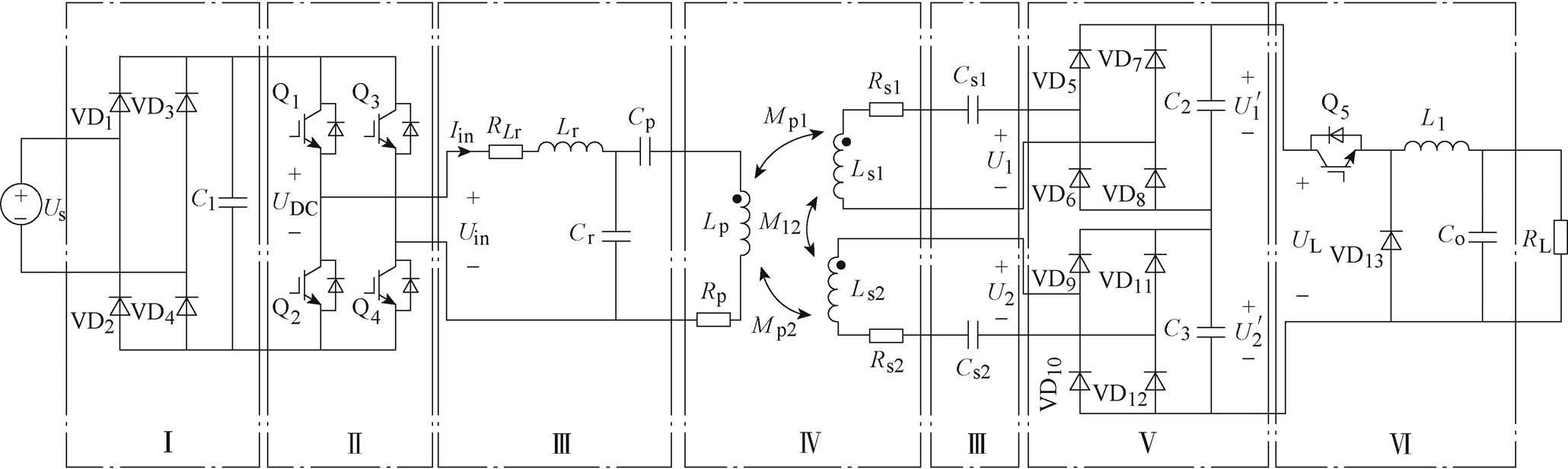
图2 采用DAD线圈的WPT系统电路
Fig 2 Circuit diagram of WPT system using DAD coil
在WPT系统中,副边线圈的偏移会引起原、副边互感的下降,一般偏移程度越大,互感下降越多,由于WPT线圈一般为轴对称结构,导致相反偏移方向下对线圈互感的影响相同,因此不能区分偏移方向。图3所示为较常用的方形线圈结构,其原、副边间的气隙磁场如图4所示,该线圈具有自身结构和磁场分布的对称性,且方形线圈磁路不能在气隙磁场内闭合,磁场泄露较大,方形线圈磁感应强度分布如图5所示,其磁场对周围环境有较强的电磁干扰,线圈的电能传输效率也较低。
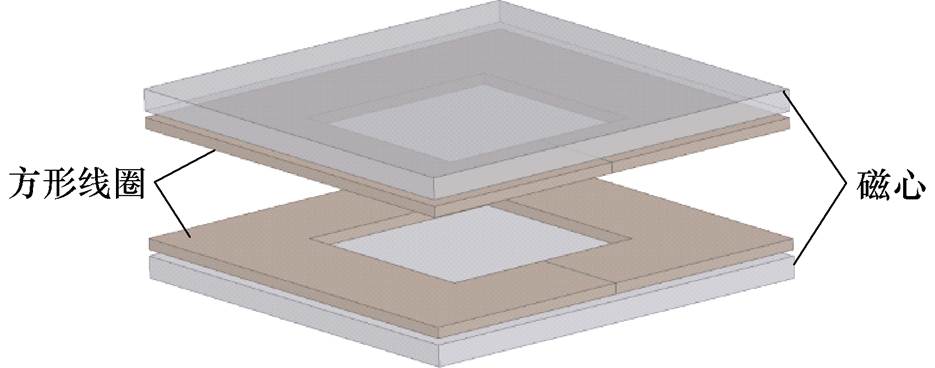
图3 方形线圈
Fig.3 Square coils
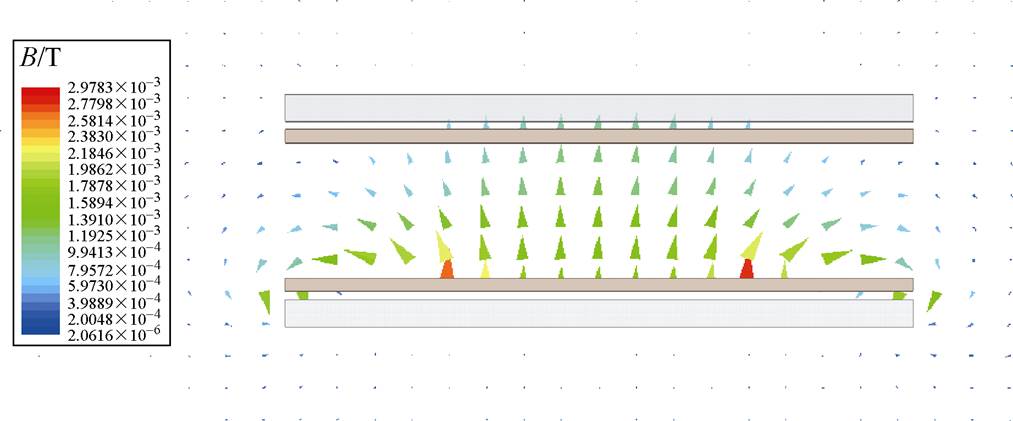
图4 方形线圈磁感应强度矢量分布
Fig.4 Magnetic induction intensity vector distribution of square coils
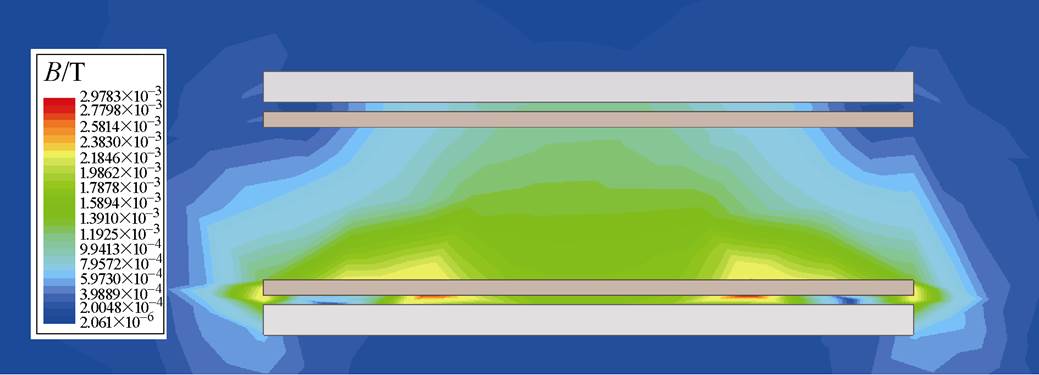
图5 方形线圈磁感应强度分布
Fig.5 Magnetic induction intensity distribution of square coils
本文提出的DAD线圈结构如图6所示。原、副边均由两个匝数尺寸相同、绕制方向相反的D型线圈组成。原边两D型线圈采用首尾相连的串联绕制方式,构成原边线圈P,副边两D型线圈S1和S2为单独绕制,绕制方向与对应的原边线圈相同。线圈S1和线圈S2与原边线圈P的互感分别为Mp1、Mp2。
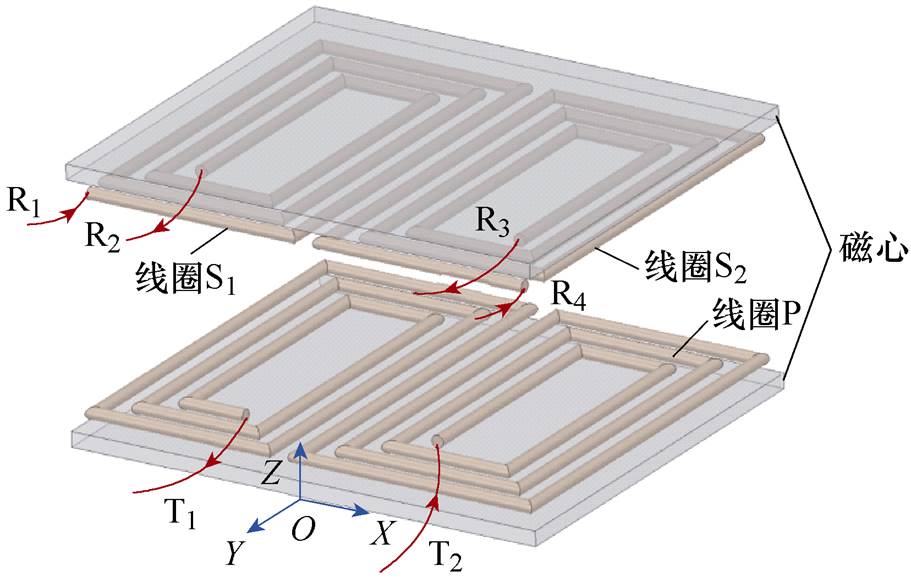
图6 DAD线圈结构示意图
Fig.6 DAD coils structure diagram
DAD线圈不仅电能传输效率较高,同时还能区分不同的偏移方向。由于DAD线圈相邻的D型线圈绕制方向相反,大部分磁力线在气隙磁场区域形成环形闭合磁场,漏磁较小,如图7和图8a所示,相较于方形线圈,原、副边耦合系数高,电能传输效率较高。当原、副线圈正对时,如图8a所示,相邻D型线圈的磁力线方向相反,密度相同;当发生偏移时,如图8b所示,磁力线发生扭曲,漏磁增大,Mp1、Mp2均降低。由于方向相反的磁力线相互抵消,导致在区域Ⅰ内磁感应强度低于区域Ⅱ,因此在该偏移方向下Mp1<Mp2,同理,在相反方向的偏移状态下Mp1>Mp2。综上所述,在不同偏移方向下,Mp1、Mp2相对大小不同,可根据比较Mp1、Mp2相对大小确定不同的偏移方向。
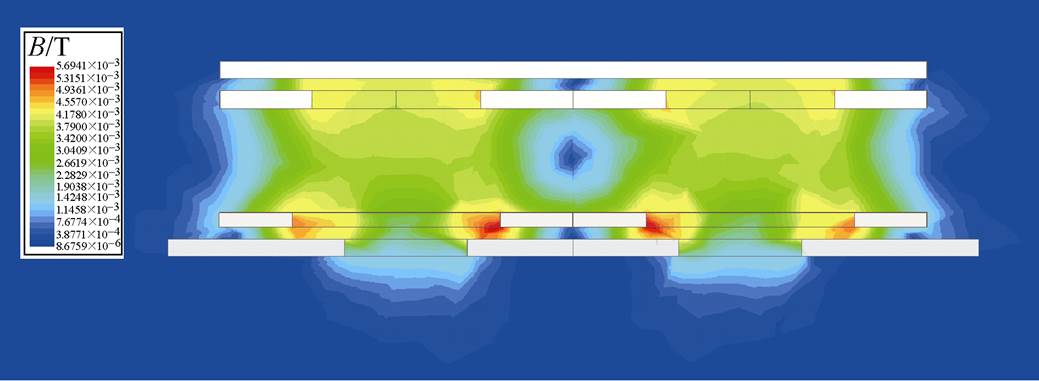
图7 DAD线圈磁感应强度分布
Fig.7 Magnetic induction intensity distribution of DAD coils
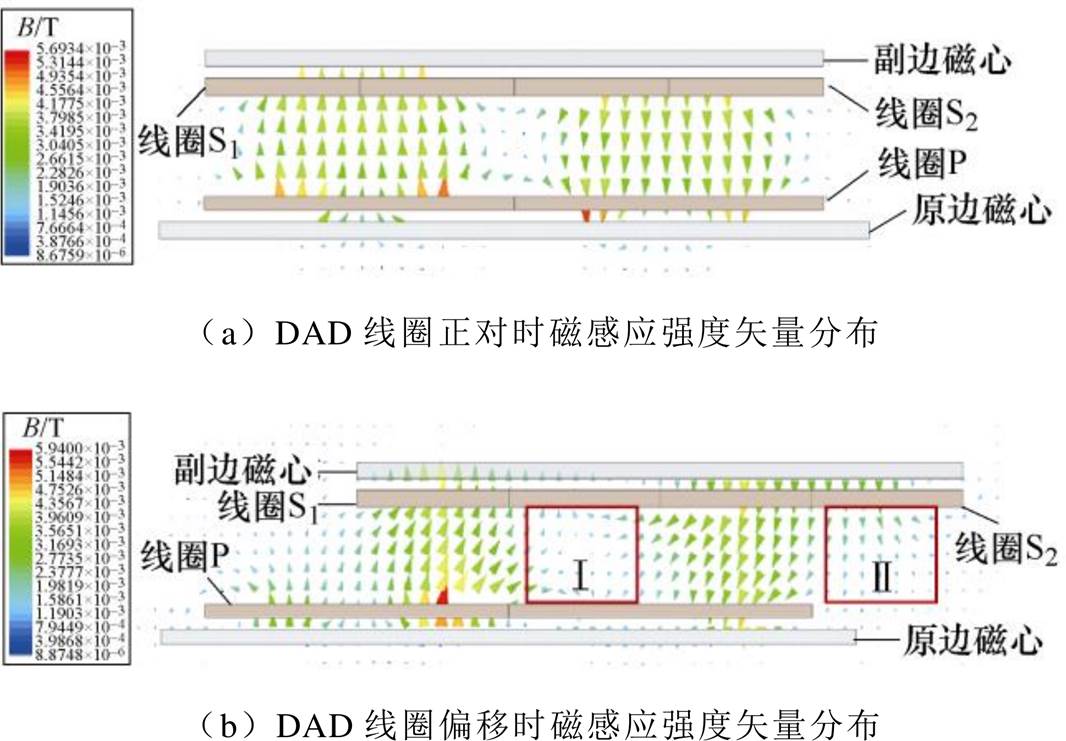
图8 DAD线圈磁感应强度矢量分布
Fig.8 DAD coils magnetic induction intensity vector distribution
线圈偏移方向与偏移量x示意图如图9所示,仿真得到的原、副边互感Mp1、Mp2随偏移量x的变化曲线如图10所示。与上文分析结果一致,当x<0时,Mp1>Mp2;当x>0时,Mp1<Mp2,不同偏移方向下互感相对大小不同,因此可以通过Mp1与Mp2的相对大小判断偏移方向;且随着x绝对值的增加,Mp1与Mp2的差值绝对值也逐渐增加,因此可用其差值绝对值判断偏移程度。综上所述,通过计算Mp1-Mp2可以实现偏移的判定,其值正、负可以判断偏移方向,其值大小可以判断偏移程度。
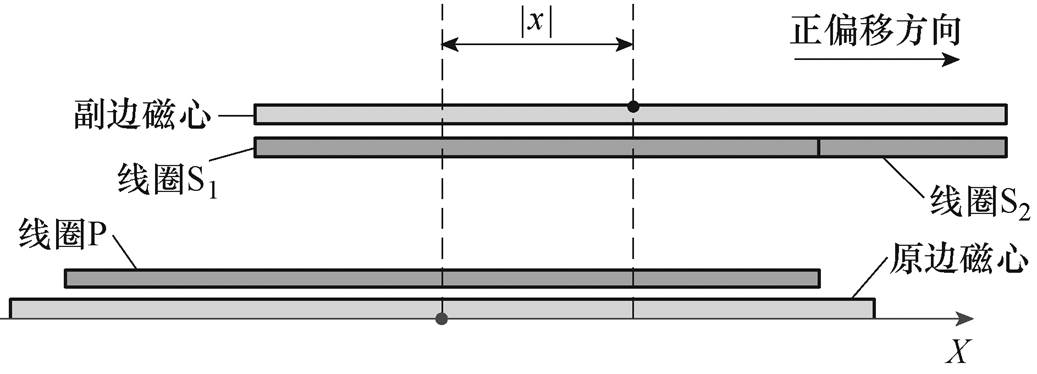
图9 线圈偏移方向与偏移量x示意图
Fig.9 Coil offset direction and offset x diagram
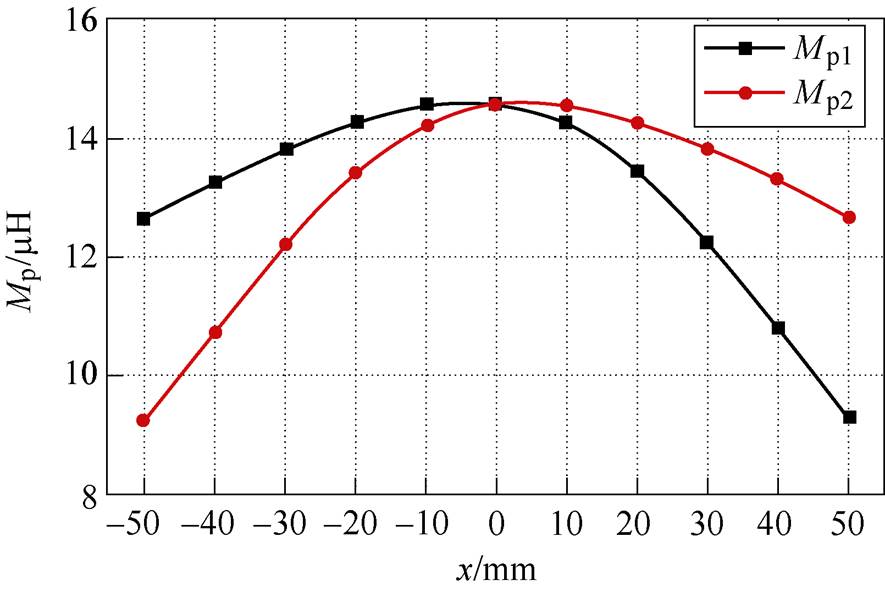
图10 原、副边互感随偏移距离的变化曲线
Fig.10 Curves of mutual inductance of primary and secondary side changing with offset distance
通过第2节的分析可以得出,DAD线圈原、副边互感Mp1、Mp2可反映偏移程度与偏移方向,通过适当的补偿拓扑设计可将互感的变化反映到可测量的电压电流参数中,同时补偿拓扑还能实现无功补偿,提高耦合机构传输效率。
LCC-S型补偿拓扑具有准恒压输出特性,当耦合机构输入电压不变时,其输出电压只与原、副边互感有关。采用LCC-S型补偿拓扑的耦合机构等效电路如图11所示。
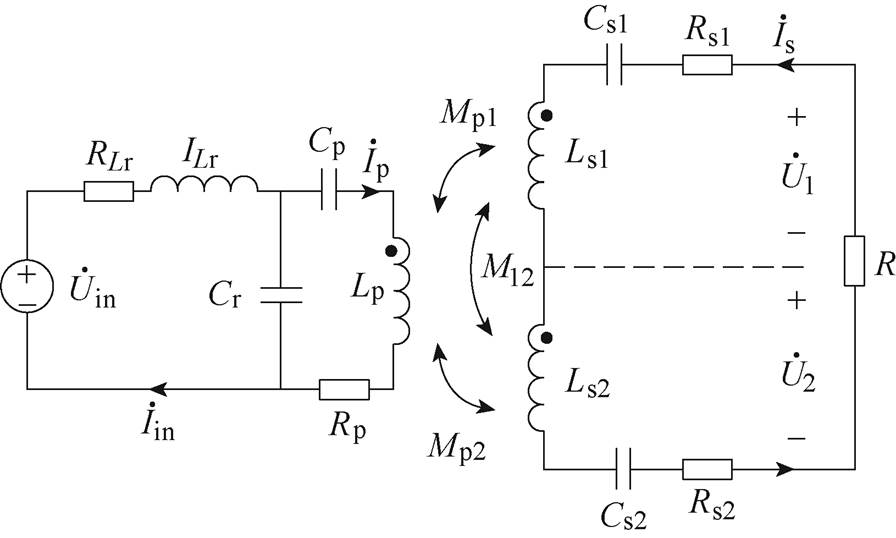
图11 LCC-S型补偿拓扑等效电路
Fig.11 LCC-S compensation topology circuit diagram
图11中, 、
、 为耦合机构的输入电压、电流,Lr、Cr、Cp、Lp组成原边谐振网络,RLr为谐振电感内阻,Rp为原边线圈内阻,M12为副边两线圈之间的互感,Ls1、Cs1、Ls2、Cs2组成副边谐振网络,Rs1和Rs2为副边线圈内阻,
为耦合机构的输入电压、电流,Lr、Cr、Cp、Lp组成原边谐振网络,RLr为谐振电感内阻,Rp为原边线圈内阻,M12为副边两线圈之间的互感,Ls1、Cs1、Ls2、Cs2组成副边谐振网络,Rs1和Rs2为副边线圈内阻, 和
和 为两线圈经补偿网络后的输出电压,R为副边的等效电阻。
为两线圈经补偿网络后的输出电压,R为副边的等效电阻。
根据霍尔基夫电压定律,对图11中的电路列写回路方程为
 (1)
(1)
在LCC-S型补偿网络中,应满足式(2)中的谐振条件为
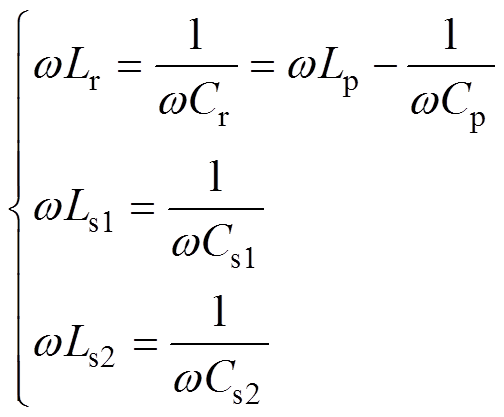 (2)
(2)
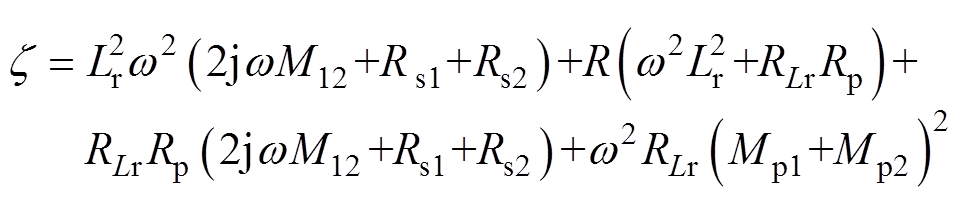
将回路电流方程代入式(2)的谐振条件,可求得各回路电流表达式为
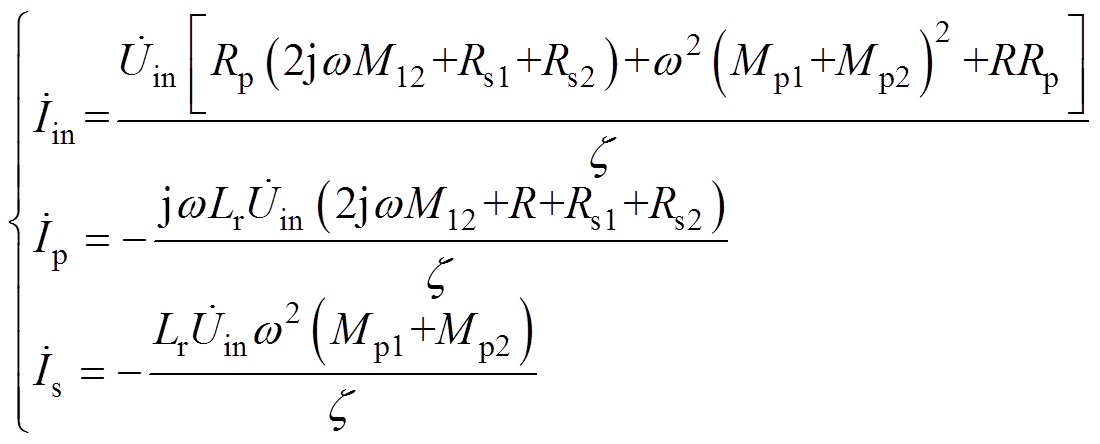 (3)
(3)
其中
进而可以求得输出电压与的表达式分别为
 (4)
(4)
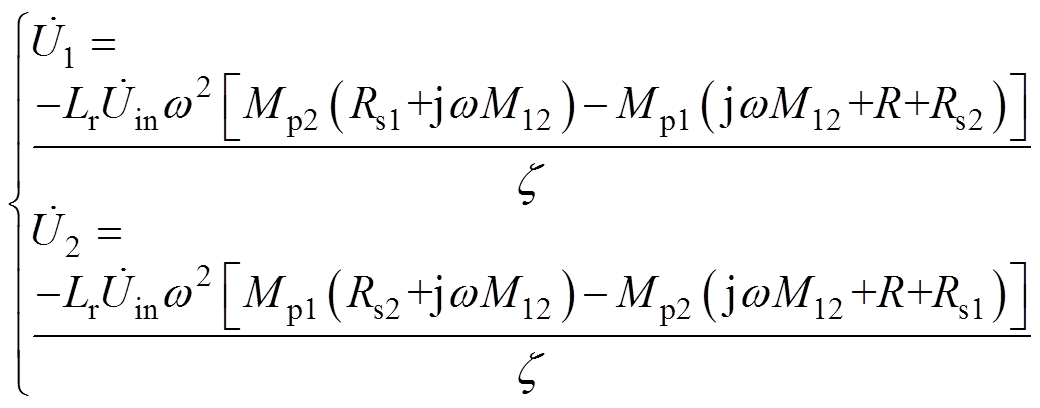
通过式(4)可以分析得到,输出电压与的表达式较为复杂,与原、副边互感Mp1、Mp2,副边间互感M12及线圈内阻Rp、Rs1、Rs2、RLr等都相关。由于实际中往往有Rp、Rs1、Rs2、RLr wMp1、wMp2、wM12、R,因此可忽略线圈内阻的影响,得到简化后的、表达式分别为
wMp1、wMp2、wM12、R,因此可忽略线圈内阻的影响,得到简化后的、表达式分别为
 (5)
(5)
从式(5)可以看出,、的值除与Mp1、Mp2有关外,与负载R和副边耦合电感M12均有关系。系统负载一般为电池电容等储能元件或电动机,其等效阻值往往会发生变化,因此会带来输出电压U1和U2的变化。输出电压U1随等效电阻R的变化曲线如图12所示,因和表达式结构相同,图12只给出了以U1曲线为例的情况。如此造成的弊端有两方面:①输出电压会随负载变化,无法实现对负载的稳定供电,加大副边DC-DC控制的难度;②输出电压的变化不仅与Mp1、Mp2相关外还受到负载等效电阻的干扰,输出电压的变化无法准确表征Mp1、Mp2的变化,偏移情况无法通过电压的变化反映。
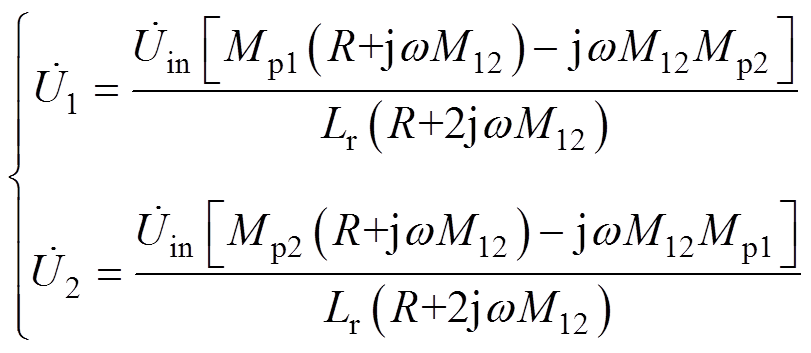
通过分析电路结构可知,造成输出电压随负载R改变的原因为副边线圈间交叉耦合互感M12的存在,因此对副边补偿电容参数值修正为
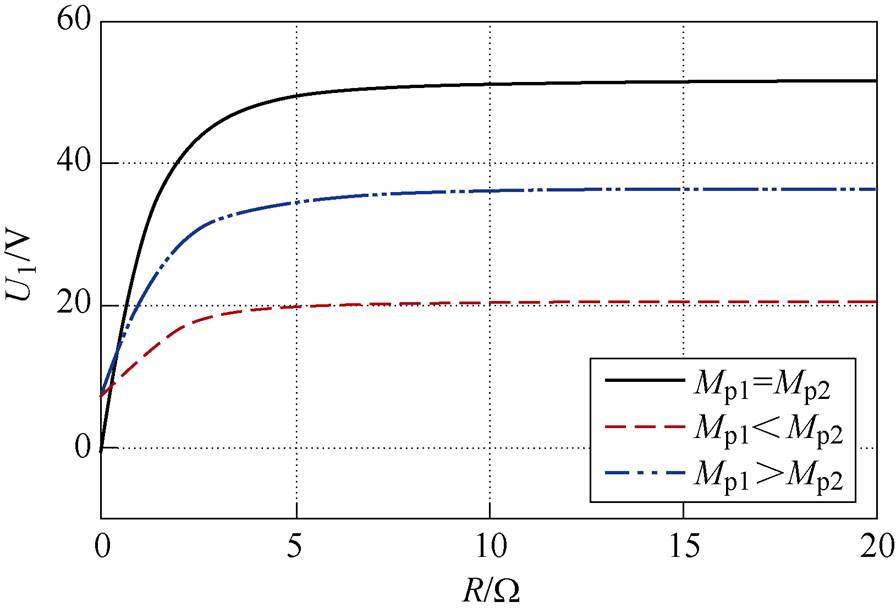
图12 不同互感关系下输出电压随等效电阻变化曲线
Fig.12 The curves of output voltage with equivalent resistance under different mutual inductance relationship
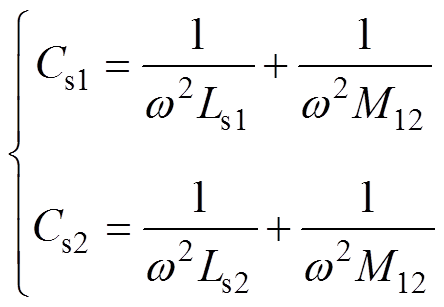 (6)
(6)
同上述过程,忽略线圈内阻后,得到输出电压与的表达式为
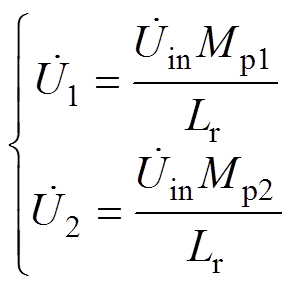 (7)
(7)
如式(7)所示,输出电压与耦合机构输入电压,原、副边之间互感Mp1、Mp2和谐振电感Lr有关。在WPT系统工作过程中,和Lr可保持不变,因此当Mp1、Mp2发生变化时,U1、U2也会随之改变,即U1、U2能完全表征Mp1、Mp2的变化,U1、U2的变化也完全由Mp1、Mp2的变化决定,且U1、U2分别与Mp1、Mp2成正比。
通过式(1)~式(7)可以推导出耦合机构电压增益、输出功率和系统效率的表达式分别为
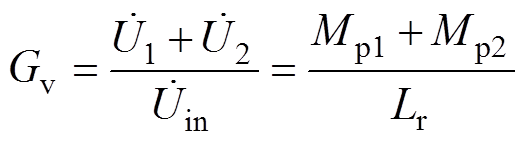 (8)
(8)
 (9)
(9)
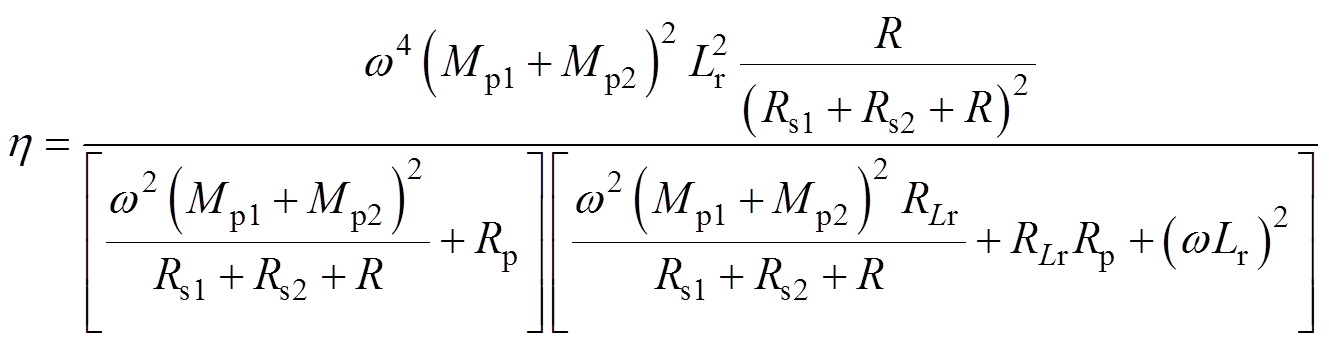 (10)
(10)
消除交叉耦合互感M12的影响后,从电能传输的角度,串联后的S1和S2可视为一个整体S,其与原边线圈的互感为Mp1+Mp2,此时与副边为单线圈结构时的输出功率和效率表达式相同,可有效简化DAD线圈的设计与控制过程。
图13所示为DAD线圈照片。图中,原边线圈宽度为450 mm,长度为800 mm,副边线圈长度和宽度为350 mm。原边线圈匝数为5匝,副边线圈匝数为4匝,原、副边线圈气隙为30 mm,仿真和实验测得的线圈自感随偏移量x的变化曲线如图14所示,仿真和实验测得的线圈互感随偏移量x的变化曲线如图15所示。
图14中,仿真和实验测得的原、副边自感随偏移量x变化较小,可认为基本不变,在偏移情况下也能实现较好的谐振补偿效果。实验测得的原边自感与仿真得到的自感值平均误差为10.06%(平均误差为在每个偏移点计算误差后取平均),实验测得的副边自感1与仿真得到的自感值平均误差为3.15%,实验测得的副边自感2与仿真得到的自感值平均误差为3.34%,误差较小,实验与仿真结果相吻合。
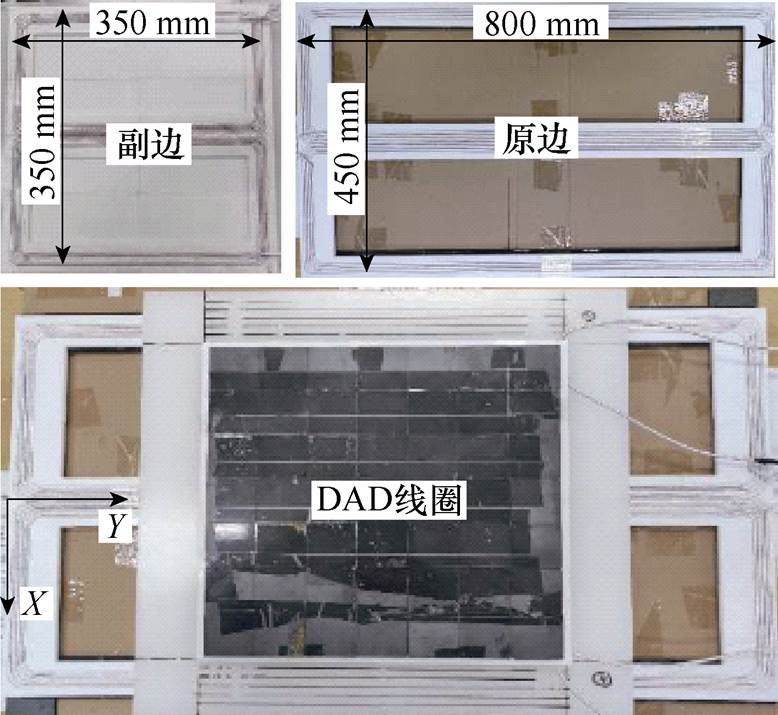
图13 DAD线圈照片
Fig.13 DAD coils photos
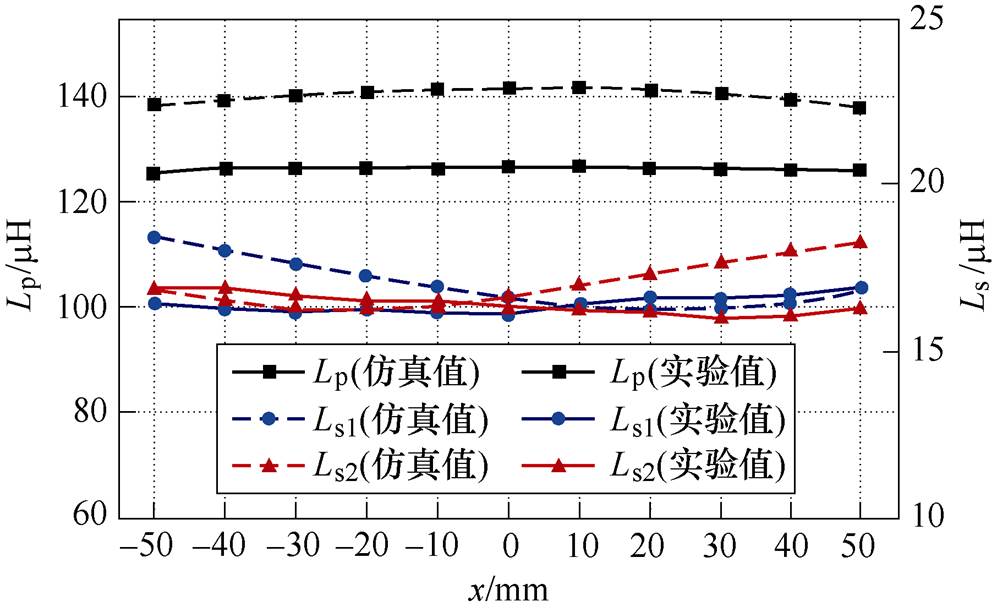
图14 仿真及实验测得原、副边自感随偏移x变化曲线
Fig.14 The curves of primary and secondary side self-inductance with offset measured by simulation and experiment
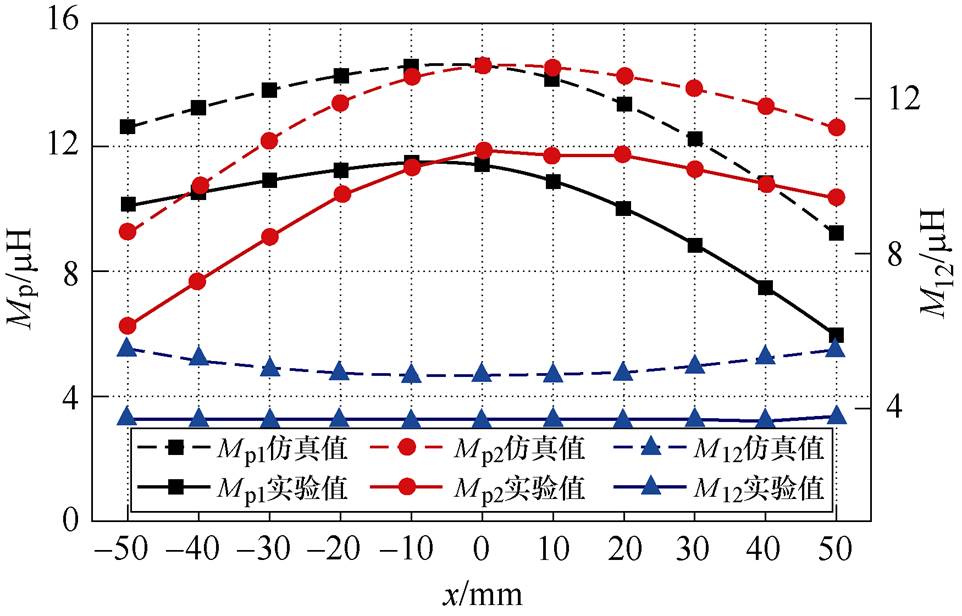
图15 仿真及实验测得原、副边互感随偏移x变化曲线
Fig.15 The curves of mutual inductance of primary and secondary sides with offset measured by simulation and experiment
图15中,副边线圈间互感M12随偏移量x变化较小,可以得到较好的补偿效果。原、副边互感值偏小且存在测量误差,导致与仿真相比有一定误差,但实验测量得到的互感变化曲线与仿真结果总体变化趋势一致,证明了第2节中提到的导航原理的正确性与可行性。注意到当线圈正对时,即x=0 mm时,由于原、副边绕制过程中存在的误差,导致互感值不同,会影响后续的偏移检测效果,因此在这种情况下,可采用互感变化差值对偏移大小和偏移方向进行判定,如图16所示。
图16中,互感变化值为当前偏移点位置的互感值与线圈正对时的互感值的差值,采用该值作为线圈偏移判断指标可以有效避免在线圈正对时原、副边两互感存在差异导致的偏移误判,可以更准确地刻画线圈偏移情况。即计算DMp1-DMp2,其符号正负表征偏移方向,其绝对值大小表征偏移量。

图16 互感变化值DMp1、DMp2随偏移量x变化曲线
Fig.16 The change curves of mutual inductance with offset x
在实际中,原边整流模块及副边DC-DC模块都较为成熟,对WPT系统性能影响较小,且不影响本研究中对线圈供电与导航性能的验证,因此实验中的电路仅包括图2中的Ⅱ~Ⅴ部分。图17所示为搭建的实验装置平台,实验台参数见表1。
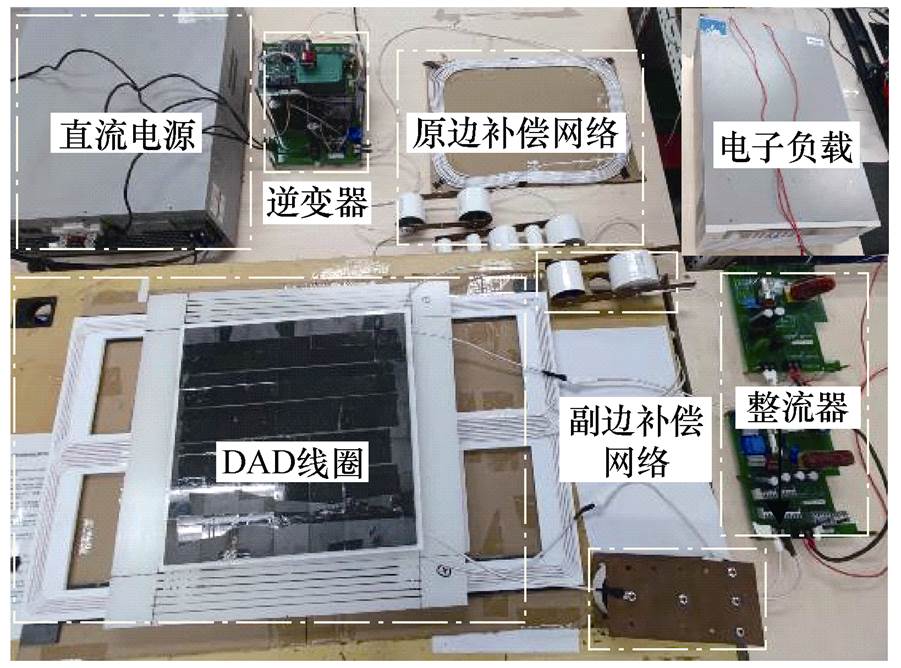
图17 实验台照片
Fig.17 Photos of the laboratory bench
表1 实验台参数表
Tab.1 Experimental bench parameters
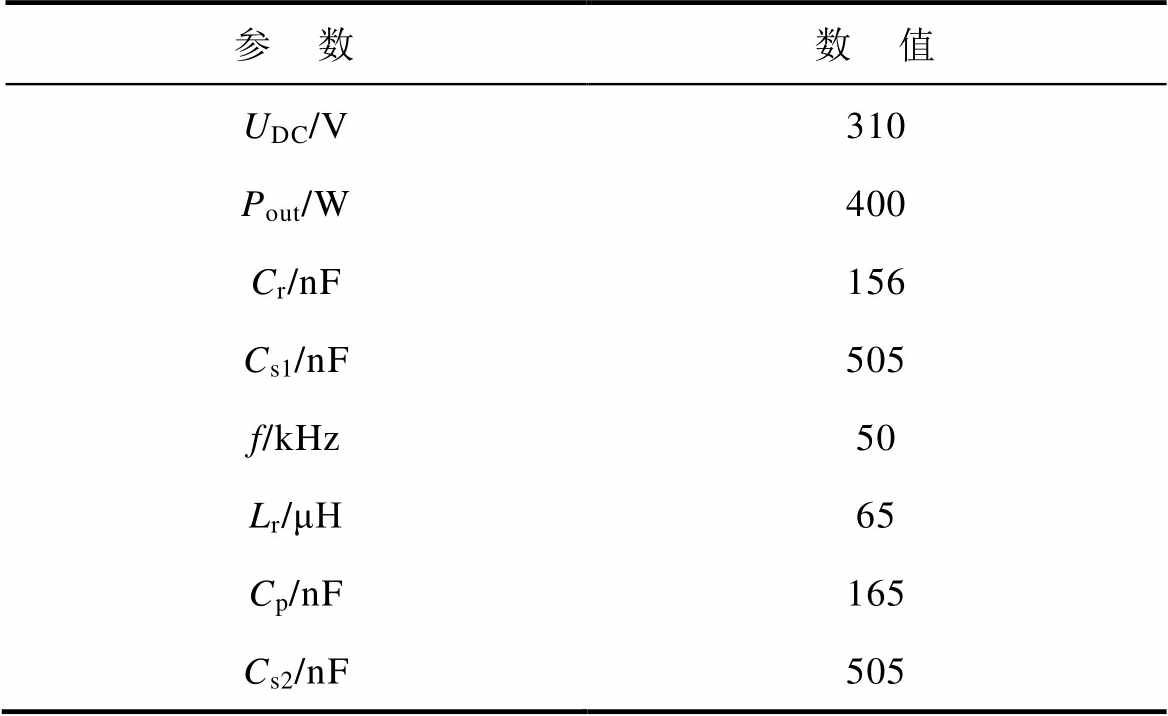
参 数数 值 UDC/V310 Pout/W400 Cr/nF156 Cs1/nF505 f/kHz50 Lr/μH65 Cp/nF165 Cs2/nF505
在恒定输入电压310 V,恒定输出功率400 W的条件下,沿图9和图13所示x轴方向进行偏移,测量了偏移范围在 (-50~+50) mm情况下整流输出电压 、
、 ,等效负载电压UL和系统效率h 随偏移的变化情况,分别如图18和图19所示。
,等效负载电压UL和系统效率h 随偏移的变化情况,分别如图18和图19所示。
图18为线圈输出电压随偏移x的变化情况。其中,图18a为两整流输出电压、随偏移x的变化情况。从图中可以看出,由于实际中两线圈绕制过程中的误差,导致线圈正对时原、副边互感Mp1、Mp2存在差异,进而导致输出电压、存在差异,即当原、副边正对时,两线圈输出整流电压不相等,会影响系统对偏移的判断。为了避免上述问题,如图18b所示,采用整流输出电压变化量 、
、 作为衡量线圈偏移情况的指标,输出电压变化量指当前整流输出电压与线圈正对时输出电压的差值。通过图18b可以看出,当偏移方向不同时,、相对大小不同,因此可根据相对大小判断线圈偏移方向;而随着偏移距离的增加,、差值绝对值增大。综上所述,通过对、数值的采集,结合x=0 mm时输出电压值,计算
作为衡量线圈偏移情况的指标,输出电压变化量指当前整流输出电压与线圈正对时输出电压的差值。通过图18b可以看出,当偏移方向不同时,、相对大小不同,因此可根据相对大小判断线圈偏移方向;而随着偏移距离的增加,、差值绝对值增大。综上所述,通过对、数值的采集,结合x=0 mm时输出电压值,计算 ,其符号正负表征偏移方向,绝对值表征偏移大小,即可完成对偏移情况的判断,进而完成对AGV驱动系统的控制,实现导航过程。
,其符号正负表征偏移方向,绝对值表征偏移大小,即可完成对偏移情况的判断,进而完成对AGV驱动系统的控制,实现导航过程。
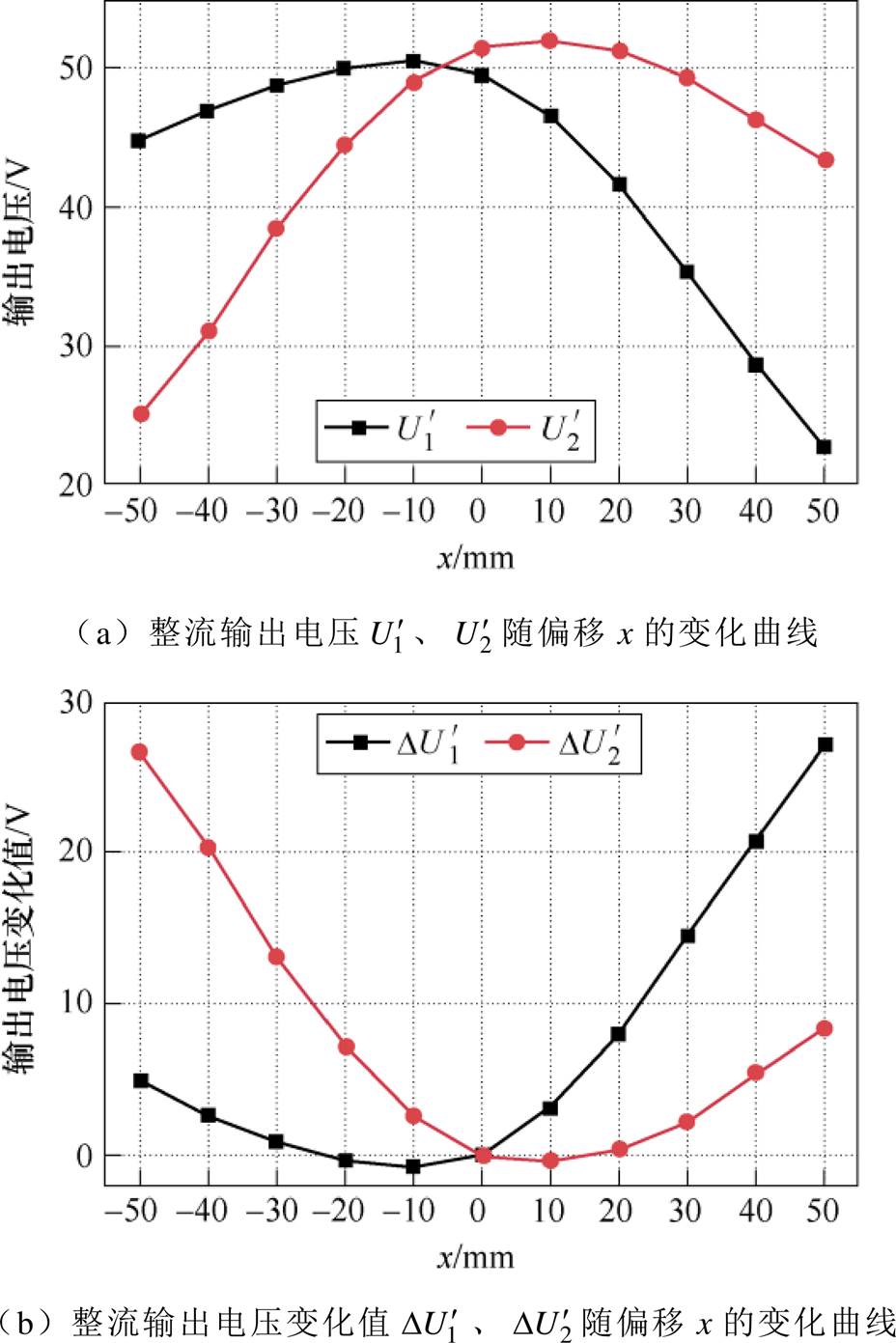
图18 整流输出电压值随偏移量x变化曲线
Fig.18 Rectifier output voltage value with offset x curves
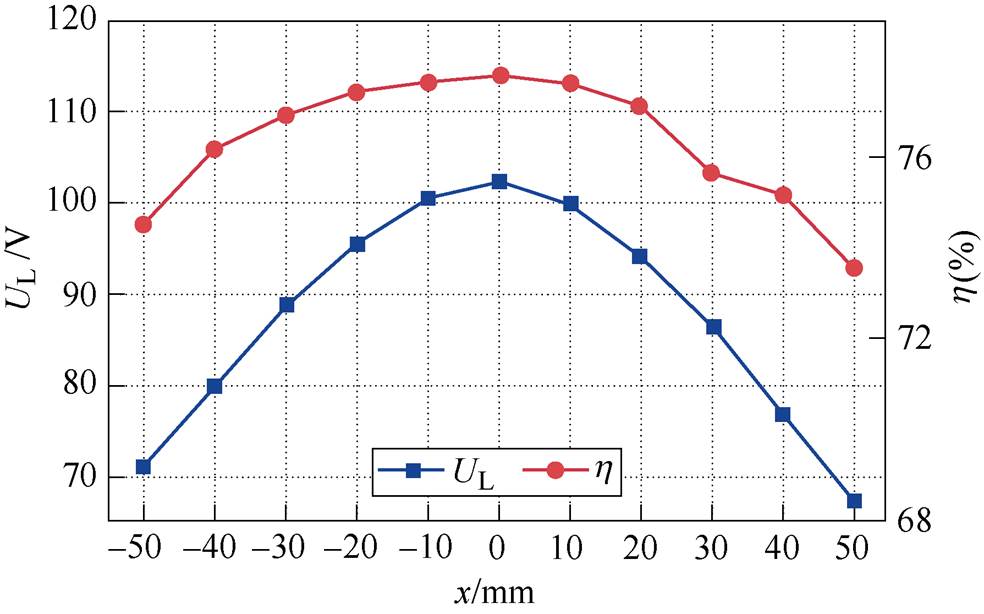
图19 输出电压UL和系统效率h 随偏移x变化曲线
Fig.19 The variation curves of output voltage UL and system efficiencyh with offset x
输出电压UL和系统效率h 随偏移x变化曲线如图19所示,在恒压310 V输入,恒功率400 W输出的情况下,WPT系统在 (-50~+50) mm范围内可以正常供电,输出电压UL在67~102 V之间,后续通过Buck电路,可实现48 V额定电压输出,符合设计的范围。系统效率在73.55%~77.80%之间,偏移情况下,系统效率波动在5%范围内,证明DAD线圈具有一定的抗偏移性。由于动态无线充电系统中,为兼顾经济性与控制复杂度,原边线圈一般较长,导致漏磁增加线圈效率较低,当前动态无线充电系统效率大多小于90%[16-18]。
图20所示为副边线圈分别在x=0 mm、x= -50 mm和x=+50 mm时的波形,其中逆变器输出电压 为幅值310 V的方波,频率为50 kHz,逆变器输出电流
为幅值310 V的方波,频率为50 kHz,逆变器输出电流 在完全补偿的情况下与电压同相。两整流器输出电压、近似为直流电压,波动率在5%范围内,且在不同偏移情况下的相对大小不同,与理论分析结果相同。
在完全补偿的情况下与电压同相。两整流器输出电压、近似为直流电压,波动率在5%范围内,且在不同偏移情况下的相对大小不同,与理论分析结果相同。
图21所示为AGV行驶过程中,发生不同方向的偏移,输出电压变化情况。从图21的波形可以看出,在行驶过程中发生不同方向的偏移电压会呈现出不同的相对大小,且电压的变化是随着偏移连续均匀的变化,与图19中静态点测试结果相吻合,进一步证明了该方案的可行性。
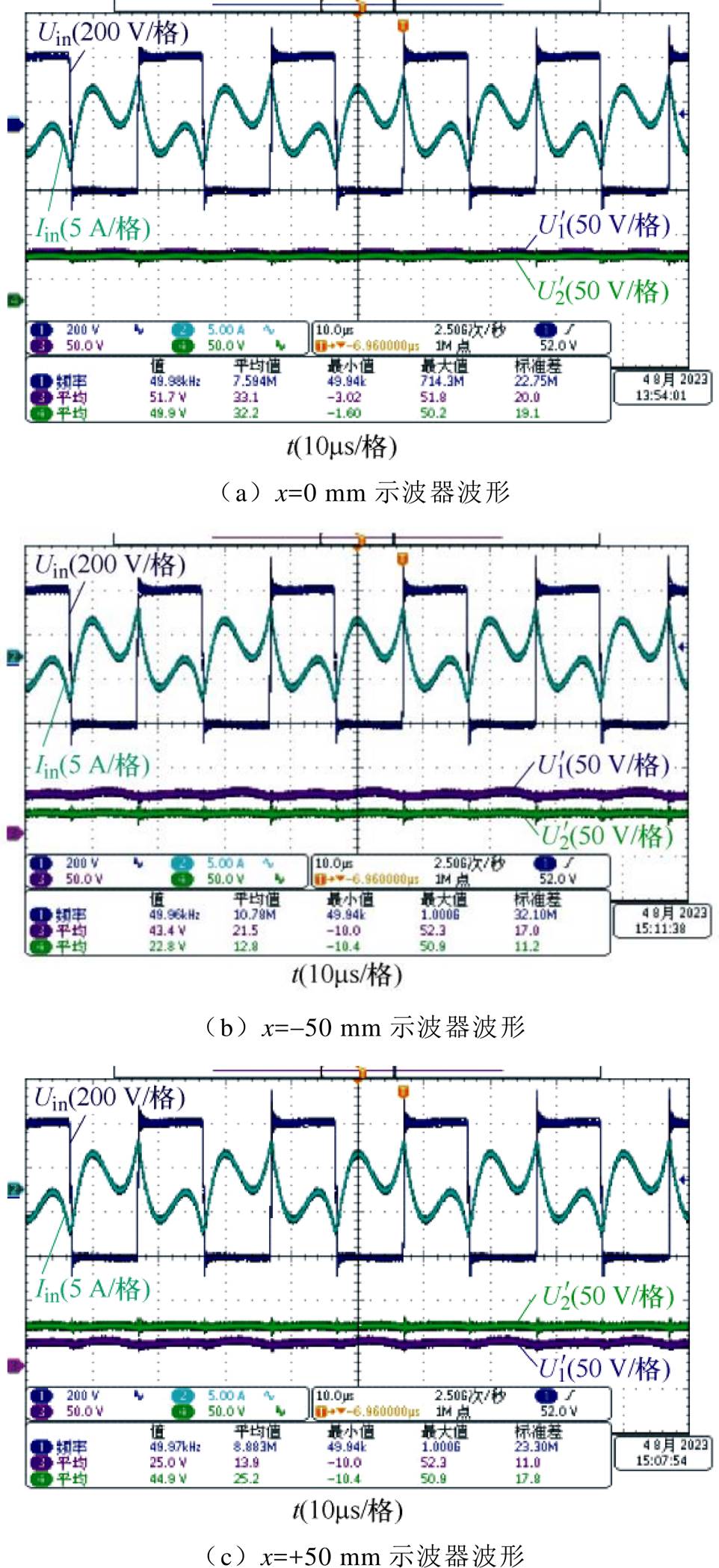
图20 不同偏移情况下示波器波形
Fig.20 Oscilloscope waveforms at different offsets
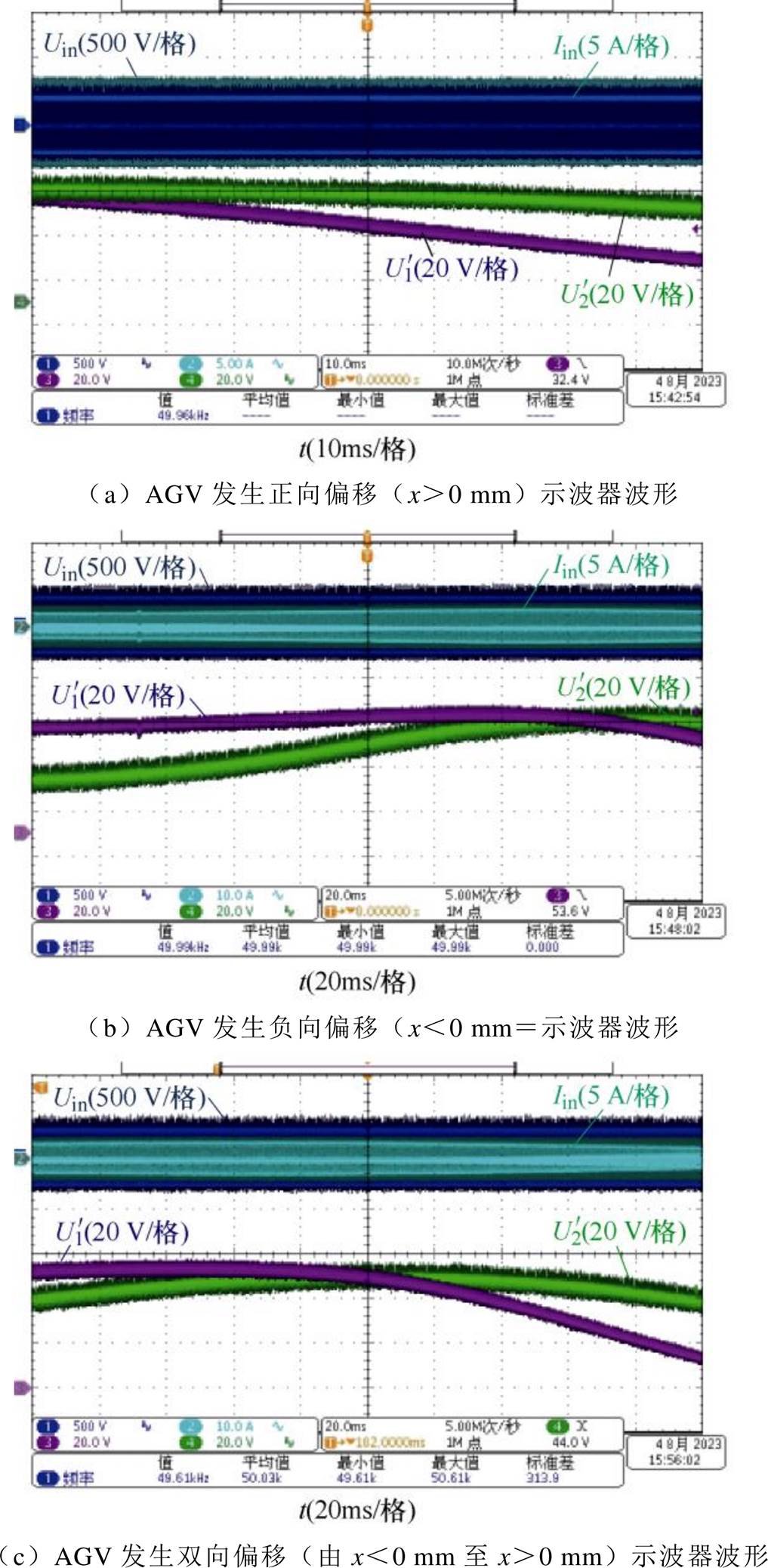
图21 行驶过程中不同偏移情况下示波器波形
Fig.21 Oscilloscope waveforms at different offsets during driving
本文提出了一种应用于AGV无线充电系统的导航与供电一体化DAD线圈。首先对比方形线圈,结合DAD线圈的磁力线分布,分析了DAD 线圈导航和供电的实现原理,接着对DAD线圈进行了建模分析,为提高其导航和供电效果,对LCC-S型补偿拓扑参数进行了改进。在此基础上,搭建了相应的实验平台,为验证导航性能,测量了DAD线圈的自感互感参数和输出电压随偏移x在 (-50~+50) mm范围内的变化曲线,变化趋势均与仿真结果一致,证明了导航原理正确性。针对线圈绕制差异导致x=0 mm时的误判问题,提出采用电压变化值表征偏移量,可实现更好的导航效果。同时x在(-50~+50) mm范围内,DAD线圈可以实现400 W的电能传输,效率波动在5%以内,证明了线圈的供电性能。
参考文献
[1] https://www.sohu.com/a/654363731_218783.
[2] Mahesh A, Chokkalingam B, Mihet-Popa L. Inductive wireless power transfer charging for electric vehicles-a review[J]. IEEE Access, 2021, 9: 137667- 137713.
[3] 赵争鸣, 张艺明, 陈凯楠. 磁耦合谐振式无线电能传输技术新进展[J]. 中国电机工程学报, 2013, 33(3): 1-13, 21.
Zhao Zhengming, Zhang Yiming, Chen Kainan. New progress of magnetically-coupled resonant wireless power transfer technology[J]. Proceedings of the CSEE, 2013, 33(3): 1-13, 21.
[4] 黄学良, 谭林林, 陈中, 等. 无线电能传输技术研究与应用综述[J]. 电工技术学报, 2013, 28(10): 1-11.
Huang Xueliang, Tan Linlin, Chen Zhong, et al. Review and research progress on wireless power transfer technology[J]. Transactions of China Elec- trotechnical Society, 2013, 28(10): 1-11.
[5] 范兴明, 莫小勇, 张鑫. 无线电能传输技术的研究现状与应用[J]. 中国电机工程学报, 2015, 35(10): 2584-2600.
Fan Xingming, Mo Xiaoyong, Zhang Xin. Research status and application of wireless power transmission technology[J]. Proceedings of the CSEE, 2015, 35(10): 2584-2600.
[6] 吴理豪, 张波. 电动汽车静态无线充电技术研究综述(上篇)[J]. 电工技术学报, 2020, 35(6): 1153-1165.
Wu Lihao, Zhang Bo. Overview of static wireless charging technology for electric vehicles: part Ⅰ[J]. Transactions of China Electrotechnical Society, 2020, 35(6): 1153-1165.
[7] 吴理豪, 张波. 电动汽车静态无线充电技术研究综述(下篇)[J]. 电工技术学报, 2020, 35(8): 1662-1678.
Wu Lihao, Zhang Bo. Overview of static wireless charging technology for electric vehicles: part Ⅱ[J]. Transactions of China Electrotechnical Society, 2020, 35(8): 1662-1678.
[8] 张献, 王杰, 杨庆新, 等. 电动汽车动态无线供电系统电能耦合机构与切换控制研究[J]. 电工技术学报, 2019, 34(15): 3093-3101.
Zhang Xian, Wang Jie, Yang Qingxin, et al. The power coupling mechanism and switching control for dynamic wireless power supply system of electric vehicle[J]. Transactions of China Electrotechnical Society, 2019, 34(15): 3093-3101.
[9] 崔淑梅, 宋贝贝, 王志远. 电动汽车动态无线供电磁耦合机构研究综述[J]. 电工技术学报, 2022, 37(3): 537-554.
Cui Shumei, Song Beibei, Wang Zhiyuan. Overview of magnetic coupler for electric vehicles dynamic wireless charging[J]. Transactions of China Elec- trotechnical Society, 2022, 37(3): 537-554.
[10] 宋凯, 朱春波, 李阳, 等. 用于电动汽车动态供电的多初级绕组并联无线电能传输技术[J]. 中国电机工程学报, 2015, 35(17): 4445-4453.
Song Kai, Zhu Chunbo, Li Yang, et al. Wireless power transfer technology for electric vehicle dynamic charging using multi-parallel primary coils[J]. Proceedings of the CSEE, 2015, 35(17): 4445-4453.
[11] Liu Qingyun, Hu S, Angeloudis P, et al. Dynamic wireless power transfer system for electric-powered connected and autonomous vehicle on urban road network[J]. IET Intelligent Transport Systems, 2021, 15(9): 1153-1166.
[12] 肖蕙蕙, 周青山, 熊山香, 等. 基于双层正交DD线圈抗偏移偏转的无线电能传输系统[J]. 电工技术学报, 2022, 37(16): 4004-4018.
Xiao Huihui, Zhou Qingshan, Xiong Shanxiang, et al. Wireless power transfer system based on double-layer quadrature double-D coupling structure with anti- misalignment and anti-deflection[J]. Transactions of China Electrotechnical Society, 2022, 37(16): 4004- 4018.
[13] 谢诗云, 杨奕, 李恋, 等. 基于双极性耦合磁场调控的高抗偏移偏转无线电能传输系统[J]. 电工技术学报, 2023, 38(18): 4838-4852.
Xie Shiyun, Yang Yi, Li Lian, et al. Wireless power transfer system with high misalignment tolerance based on bipolar coupling magnetic-field control[J]. Transactions of China Electrotechnical Society, 2023, 38(18): 4838-4852.
[14] 陈庆彬, 范峰, 汪金帅, 等. 无线电能传输磁耦合系统Litz线圈交流电阻精确评估方法[J]. 电工技术学报, 2022, 37(24): 6294-6305.
Chen Qingbin, Fan Feng, Wang Jinshuai, et al. Accurate evaluation method of litz coil AC resistance in wireless power transfer magnetically-coupled system[J]. Transactions of China Electrotechnical Society, 2022, 37(24): 6294-6305.
[15] 谭平安, 许文浩, 上官旭, 等. 无线电能传输系统中组合串绕六边形线圈的互感建模及参数优化[J]. 电工技术学报, 2023, 38(9): 2299-2309.
Tan Ping'an, Xu Wenhao, Shangguan Xu, et al. Mutual inductance modeling and parameter optimi- zation of wireless power transfer system with combined series-wound hexagonal coils[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(9): 2299-2309.
[16] 陈志鑫, 张献, 沙琳, 等. 基于频率调节的电动汽车无线充电互操作性提升方法研究[J]. 电工技术学报, 2023, 38(5): 1237-1247.
Chen Zhixin, Zhang Xian, Sha Lin, et al. Research on improving interoperability of electric vehicle wireless power transfer based on frequency adjustment[J]. Transactions of China Electrotechnical Society, 2023, 38(5): 1237-1247.
[17] 赵进国, 赵晋斌, 张俊伟, 等. 无线电能传输系统中有源阻抗匹配网络断续电流模式最大效率跟踪研究[J]. 电工技术学报, 2022, 37(1): 24-35.
Zhao Jinguo, Zhao Jinbin, Zhang Junwei, et al. Maximum efficiency tracking study of active impe- dance matching network discontinous current mode in wireless power transfer system[J]. Transactions of China Electrotechnical Society, 2022, 37(1): 24-35.
[18] Liu Sheng, Feng Yue, Weng Wanying, et al. Contactless-sensor-based output feedback control with maximum efficiency tracking technique in indu- ctive power transfer systems[J]. IEEE Transactions on Power Electronics, 2023, 38(7): 9218-9229.
[19] Kanazawa H, Uwai H, Kiuchi S, et al. Receiver- position-based unbalanced-current control for a three- to single-phase wireless power transfer system for AGVs[J]. IEEE Transactions on Industrial Electronics, 2023, 70(4): 3245-3256.
[20] Wang Deyu, Fu Chaowei, Zhao Qinglin, et al. A PSO-based optimization design of W-type noncontact transformer for stable power transfer in DWPT system[J]. IEEE Transactions on Industry Appli- cations, 2022, 58(1): 1211-1221.
[21] Yang Bin, Lu Yuanfang, Peng Yuner, et al. Analysis and design of a T/S compensated IPT system for AGV maintaining stable output current versus air gap and load variations[J]. IEEE Transactions on Power Electronics, 2022, 37(5): 6217-6228.
[22] Su Shijian, Zeng Xianping, Song Shuang, et al. Positioning accuracy improvement of automated guided vehicles based on a novel magnetic tracking approach[J]. IEEE Intelligent Transportation Systems Magazine, 2020, 12(4): 138-148.
[23] Rozsa Z, Sziranyi T. Obstacle prediction for automated guided vehicles based on point clouds measured by a tilted LIDAR sensor[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(8): 2708-2720.
[24] Jiang Chaoqiang, Chau K T, Liu Chunhua, et al. Move-and-charge system for automatic guided vehicles[J]. IEEE Transactions on Magnetics, 2018, 54(11): 1-5.
Abstract As the advent of the fourth industrial revolution develops all automated and connected systems in industries, automated guided vehicles (AGVs) have become essential technologies for factory production and logistics systems. Since the AGV should be automatically parked and charged in the charging station, wireless power transfer (WPT) technologies are inevitably used instead of plug-in-type power cables or conductive charging. Compared with electric vehicles, the navigation system of AGV adds new challenges to the application of WPT technology. Recent studies have paid less attention to this problem. This paper proposes a navigation and power supply integrated DAD coil.
This paper introduces the structure of DAD coils and analyzes the principle of the DAD coil navigation and power supply from the coil magnetic field perspective. Most magnetic lines of the DAD coil form an annular closed magnetic field in the air gap magnetic field area. The leakage magnetic field is small, the coupling coefficient between primary and secondary is high, and the coil efficiency is high. From the navigation perspective, under different offset directions, the mutual inductance of the two coils on the secondary side changes differently. Therefore, the offset direction can be judged according to the relative value of mutual inductance, and the offset value can be judged by the difference of mutual inductance.
Then, the DAD coil with an LCC-S compensation topology is modeled and analyzed, and the loop current equation is written. With the traditional compensation parameters, it is found that the value of the coil output voltage is related to the secondary coupling inductance. There are two disadvantages: (1) The load voltage changes with the load, which is not conducive to DCDC voltage modulation and voltage stability; (2) The way of characterizing the offset direction and offset value by the voltage output difference is disturbed by the load. Therefore, the compensation parameters are improved, making the output voltage of the two secondary coils only dependent on the input voltage of the coupling mechanism, mutual inductance between the primary and secondary sides, and resonant inductance Lr. In general, during the operation of the WPT system, Uin and Lr remain unchanged, U1 and U2 can fully characterize the changes of Mp1 and Mp2. The two secondary coils can be used as a whole, which is conducive to further analysis and optimization.
Finally, the navigation and power supply performance of the DAD coil is verified by experiments. The mutual inductance and self-inductance parameters are measured, verifying the correctness of the navigation principle. A 400 W wireless charging system was built. The coil output voltage, load voltage, and efficiency were measured in the range from -50 mm to +50 mm offset. It is proved that the offset direction can be judged by the relative value of the secondary output voltage, and the offset value can be judged by the voltage difference. Aiming at the misjudgment problem when x=0 caused by the coil winding difference, using the voltage change value to characterize the offset can achieve a better navigation effect. In the range from -50 mm to +50 mm, the DAD coil achieves 400 W stable power transmission, and the efficiency is between 73.55% and 77.80%.
keywords:Automated guided vehicle (AGV), wireless power transfer (WPT), coil, navigation
DOI: 10.19595/j.cnki.1000-6753.tces.230831
中图分类号:TM724
收稿日期 2023-06-02
改稿日期 2023-08-30
冯鸿运 女,2000年生,硕士研究生,研究方向为无线电能传输。E-mail: 21121419@bjtu.edu.cn
林 飞 男,1973年生,教授,博士生导师,研究方向为电力电子与电力传动。E-mail: flin@bjtu.edu.cn(通信作者)
(编辑 陈 诚)