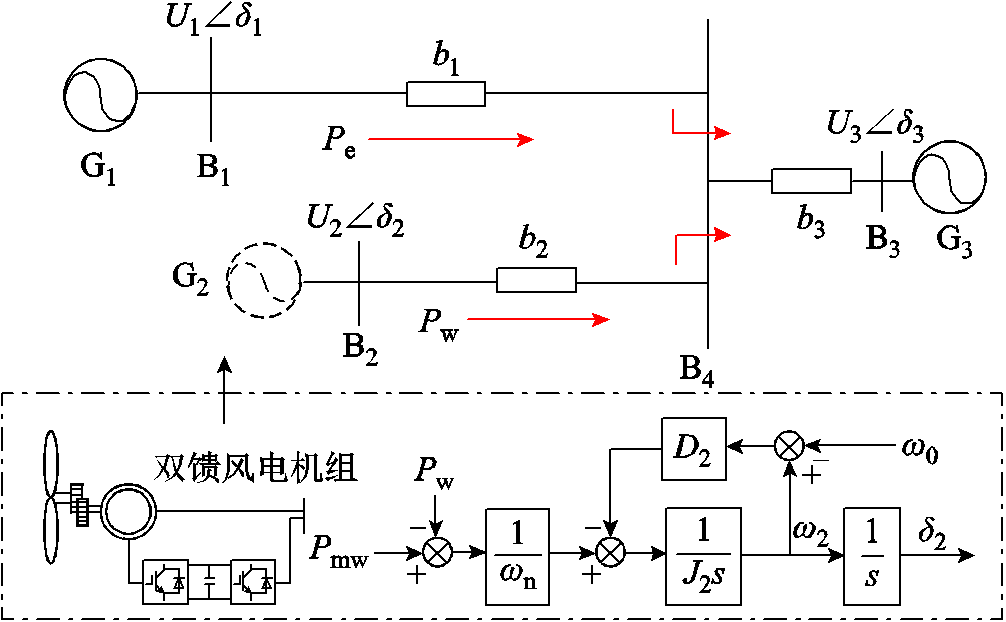
图1 双馈风电机组并网系统及虚拟同步机控制结构
Fig.1 Grid-connected system of doubly-fed wind turbine and control structure of virtual synchronous generator
摘要 新能源与同步发电机组间高效暂态能量转移是新型电力系统抑制功率振荡的关键。该文首先分析同步发电机组和双馈风电机组间处于虚拟同步运行时的虚拟轴系耦合关系;其次,通过非线性功率耦合,引入立方刚度,建立非线性弹性耦合下含风电的两自由度系统动态模型;再次,基于哈密顿原理,分析引入立方刚度后风电并网系统的暂态能量转移过程,推导机组间能量完全转移的必要条件,并提出双馈风电机组的非线性弹性耦合控制策略,依据所得必要条件完成控制器参数优化设计;最后,搭建风电高比例仿真系统,验证了双馈风电机组在所提控制方法下能够高效转移暂态能量,显著提升其功率振荡抑制和频率支撑能力。
关键词:风力发电 弹性耦合 功率振荡 虚拟同步 暂态能量
在“双碳”目标下,风电、光伏将大规模接入电网,但在新能源汇集区域,如新疆哈密等地,已多次出现功率振荡[1-3]。目前,高渗透新能源对系统动态稳定性的影响机理及快速并网支撑技术亟待研究。新能源采用最大功率跟踪控制提升了能源利用率,但也使其与电网电气解耦,失去了对系统稳定性的快速支撑能力[4-5]。受常规机组运行影响,新能源并网支撑仅关注如何模拟同步机的惯量及阻尼特性。在虚拟同步运行状态下,构网型新能源虽然可以具备与同步机相似的频率及电压支撑效果,但电力电子换流器的功率调节潜力并未得到充分释放。
近年来,虚拟同步控制下的新能源并网支撑受到了广泛关注,国家电网公司已在张北风光储基地、重庆巫溪等地陆续建设投运了多个虚拟同步机示范工程[6-7]。虚拟同步运行时,风电机组利用虚拟惯量响应系统频率变化,阻尼控制则用于抑制系统功率振荡。然而,随着虚拟同步技术研究的不断深入,已有文献发现引入虚拟惯量后,系统衰减特性会被削弱,且虚拟惯量和阻尼参数设计存在矛盾[8-9]。文献[10-11]指出虚拟惯量参数如果设置不当,容易引起功率振荡。不仅如此,虽然虚拟同步机具备了与同步机相似的动态特性,但是在面对电力系统中复杂的振荡类型时,虚拟同步机存在超调现象,甚至可能引发系统谐振[12-13]。文献[14]发现风电机组的虚拟惯量支撑存在频率超调问题,会延缓系统频率恢复。文献[15]提出一种虚拟惯量自适应控制策略,可有效改善系统频率支撑性能。文献[16-17]指出在一些运行工况下虚拟同步机表现出“负阻抗”特性,引发系统谐振。目前,虚拟同步机参数设计通常采用小信号分析法[18],但虚拟惯量和阻尼参数的设计矛盾依旧存在,虚拟惯量的引入不仅削弱了系统阻尼特性,还增加了系统谐振的风险,新能源并网支撑仅依靠虚拟同步机模拟同步机运行特性,无法满足友好并网要求,电力电子换流器赋予双馈风电机组(Doubly-Fed Induction Generator, DFIG)的友好并网潜力仍有待进一步激发。
为解决虚拟惯量和阻尼间存在的设计矛盾,文献[19-20]通过调整虚拟同步机的阻尼比,完成了虚拟惯量和阻尼参数的优化设计,降低了频率及功率的超调量。文献[21]以最小化扰动后系统不平衡能量为目标,基于遗传算法优化设计了虚拟惯量和阻尼参数,改善了系统的频率稳定性。文献[22]则通过神经网络算法对虚拟惯量进行自适应调整,改善了虚拟同步机的调频性能。文献[23]采用粒子群算法和Prony方法辨识了系统振荡模态,完成了虚拟惯量和阻尼参数优化设计,改善了系统频率稳定性和功率振荡抑制性能。在同步运行模式下,上述方案虽然通过复杂的控制算法折中处理了虚拟惯量与阻尼两种控制功能,在一定程度上改善了系统稳定性,但引入的控制算法需结合较为复杂的逻辑,增加了工程应用难度。结合电力系统暂态稳定机理,提升系统稳定性的关键是实现振荡过程中暂态能量的高效转移。在新能源与同步机之间建立轴系耦合必然可以为系统暂态能量提供新的转移路径。虚拟同步控制下,新能源机组与同步机的功角变化相同,机组间可近似视作刚性连接,由于虚拟同步机模拟常规同步机的功率特性,在此模式下完成的参数设计,使新能源的功率调节能力被限制在同步运行模式中,也导致了参数设计始终存在矛盾且无法调和。因此,分析同步机和虚拟机间的虚拟轴系耦合关系,将是揭示新能源暂态能量转移机理的关键,也是进一步释放新能源友好并网支撑性能,提升新型电力系统稳定性亟待突破的技术瓶颈,但目前仍需深入探讨。
为提升新能源的并网支撑性能,本文首先分析了同步机和虚拟同步机之间的弹性耦合特性,并引入立方刚度,建立了非线性弹性耦合下含风电的并网系统动态模型;其次,基于哈密顿能量函数分析方法,得到非线性弹性耦合下同步机和虚拟同步机之间惯量设置的条件,并基于双馈风电机组提出了非线性弹性耦合控制策略;最后,搭建仿真系统,验证双馈风电机组在所提控制策略下可高效转移系统暂态能量,大幅提升对系统功率和频率波动的抑制能力。
双馈风电并网系统拓扑和虚拟同步机控制系统结构如图1所示。双馈风电机组的虚拟转速w2经过积分环节得到虚拟功角d2,再输入转子侧换流器,进而实现对输出功率的控制[24-25]。通过引入惯量和阻尼环节,模拟了同步发电机的运行特性。在此控制模式下,双馈风电机组可等效为一台虚拟同步机(G2)。本文采用单机等值模型分析虚拟同步机与同步发电机之间的轴系耦合关系。该模型有利于分析虚拟同步机与一个同调机群或区域电网间的振荡能量转移问题。在实际系统中,区域内多台发电机或多区域互联系统之间的振荡需要多个虚拟同步机群与多组同调机群分别建立弹性耦合完成多模态振荡抑制。图1中,G1为同步发电机组;G3为参考电机,用于模拟电网。
图1 双馈风电机组并网系统及虚拟同步机控制结构
Fig.1 Grid-connected system of doubly-fed wind turbine and control structure of virtual synchronous generator
本文主要关注虚拟同步机与同步发电机之间的振荡问题。若多台发电机同频振荡,目前模型均采用单机等值处理方式,如图1所示,在电力系统稳定分析中可认为是两区域间或同调机群与参考节点之间的振荡问题。若多机之间存在非同频振荡,则应属于区域内机组之间的振荡问题。两种振荡类型的状态变量并不相同,前者是同步发电机与参考节点之间的功角偏差,后者则是多台同步发电机之间的功角偏差。对于多台同步机之间的振荡可通过建立关于同步机功角偏差状态变量的动态方程,形成多轴系耦合,以抑制多机振荡。
如图1所示,在虚拟同步控制下,双馈风电机组和与之并联运行的同步机可等效为同调机群,两者的功角变化相同,两机组间无直接功率耦合,双馈风电机组和同步机的输出功率均单向流入电网。此时两种机组的电磁功率可分别表示为
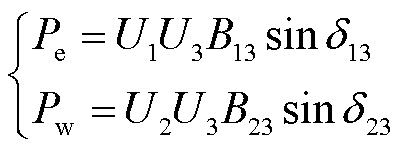 (1)
(1)
式中,U1、U2、U3分别为母线B1、B2、B3处的电压;d1、d2、d3分别为G1、G2、G3的功角,dij=di-dj,i, j=1, 2, 3;B13、B12、B23分别为G1与G3、G1与G2、G2与G3间的导纳;Pe和Pw分别为G1和G2的电磁功率。
为进一步提升双馈风电机组对系统暂态能量的转移效率,需在机组间建立新的功率耦合关系,使风电机组的功角变化不再与同步机相同,进而摆脱同步运行模式的束缚,为暂态能量开辟新的转移路径。
若双馈风电机组的功角具备独立性,不再与同步机同步变化,此时双馈风电机组和同步发电机的电磁功率可分别表示为
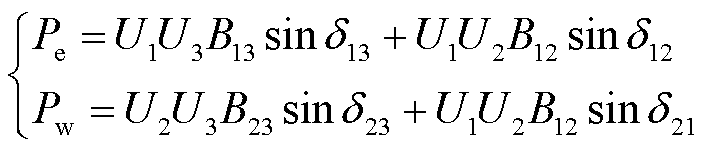 (2)
(2)
虚拟同步控制下,双馈风电机组能够模拟同步发电机的惯量和阻尼特性,两者的转子动态方程可表示为
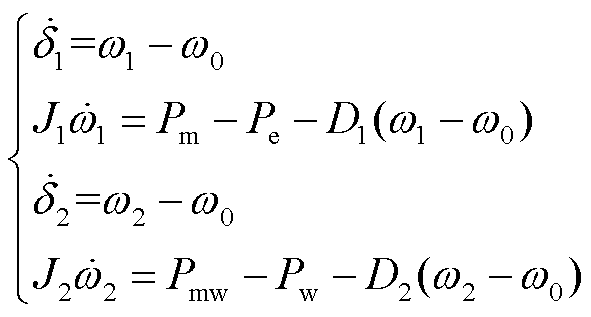 (3)
(3)
式中, 、
、 分别为G1、G2的角速度;
分别为G1、G2的角速度; 为系统同步角速度;D1、D2分别为G1、G2的阻尼系数;J1、J2分别为G1、G2的惯量;Pm、Pmw分别为G1、G2的机械功率。
为系统同步角速度;D1、D2分别为G1、G2的阻尼系数;J1、J2分别为G1、G2的惯量;Pm、Pmw分别为G1、G2的机械功率。
对式(2)线性化后,可得电磁功率小扰动方程为
 (4)
(4)
其中
 (5)
(5)
式中,d10、d20分别为功角d1、d2的初始值;Dd1和Dd2分别为同步机和双馈风电机组的功角变化量。
由式(4)可知,参数k2为Dd1-Dd2的比例系数,该系数决定了同步发电机与虚拟同步机转轴之间位置角偏差的位移量。结合机械振动理论,可将参数k2定义为虚拟联轴刚度,进而建立双馈风电机组和同步机之间的联轴耦合关系。引入虚拟联轴刚度后,双馈风电机组不再处于同步运行模式中,由于功角具备独立性,在系统振荡过程中,将更有利于发挥其功率支撑能力。
将式(4)代入式(3)并进行线性化后,可得系统小扰动方程为
 (6)
(6)
为进一步提高系统暂态能量的转移效率,实现暂态能量的单向高效转移,本文将引入立方刚度耦合,通过附加立方耦合,生成新的非线性耦合功率,建立双馈风电机组与同步机间的非线性弹性耦合关系。
由于式(6)中建立的虚拟同步控制下双馈风电并网系统的运动模型与机械领域中耦合非线性振子的两自由度运动模型具有相似性[26-27],并且参考近年来立方刚度耦合在航天领域整星减振技术中的成功应用,在虚拟同步机中引入新的立方刚度,具有理论依据和应用前景。引入立方刚度耦合后,两种机组间将建立起非线性功率耦合关系,为提升风电机组的并网支撑性能创造有利条件。
引入立方刚度耦合后,系统的小扰动方程可表示为
 (7)
(7)
引入非线性弹性耦合后,改变了风电机组与同步机间的功率耦合关系,风机可主动参与系统功率振荡,有利于进一步释放风电机组的并网主动支撑潜力。
现代控制领域中的哈密顿原理可用于计算系统暂态能量,进而分析系统的振荡特性。通过建立哈密顿能量函数,可分析非线性弹性耦合下系统暂态能量的转移原理。
为分析非线性弹性耦合控制下的双馈风电机组和同步发电机间的暂态能量转移原理,考虑式(7)的内在保守系统,可表示为
 (8)
(8)
引入新的时间尺度t=t(k1/J1)1/2,并进行以下变量代换,kn1=k2/k1,kn2=k3/k1,e=J2/J1,将其代入式(8)中可得
 (9)
(9)
为了分析双馈风电机组和同步机之间的暂态能量转移原理,本文通过复变量-平均法和多尺度展开方法推导系统的慢变方程。在此基础上建立哈密顿能量函数分析机组间暂态能量的转移过程,同时引入以下复变量替换:
 (10)
(10)
式中,w为双馈风电机组的振动频率;j1、j2为快变量w的慢变调制;“*”表示共轭。
对式(9)引入以下变量替换:
 (11)
(11)
式(9)可转换为
 (12)
(12)
将式(12)进行多尺度展开为
 (13)
(13)
式中, =t,
=t, =et。
=et。
其中,e0阶满足: 。由式(13)可知,j10、j20与t0无关。多尺度展开为一种数值近似处理方法,通过多尺度展开,提取系统的慢变方程。本文采用近似处理方式,仅考虑前两阶,忽略高阶小量,因而此处的多尺度展开与实际振荡时间不同。e1阶对t0积分得到的慢变方程为
。由式(13)可知,j10、j20与t0无关。多尺度展开为一种数值近似处理方法,通过多尺度展开,提取系统的慢变方程。本文采用近似处理方式,仅考虑前两阶,忽略高阶小量,因而此处的多尺度展开与实际振荡时间不同。e1阶对t0积分得到的慢变方程为
 (14)
(14)
对式(14)进行正则变换可得式(12)的两个首次积分为
 (15)
(15)
 (16)
(16)
对复变量j10和j20在复平面展开可得
 (17)
(17)
将式(17)代入式(15)中可得
 (18)
(18)
式中,n为常数;ncosq、nsinq分别为复变量j10、j20的幅值;a、b分别为复变量j10、j20的相位,f =a-b。由式(18)可知,机组间暂态能量的转移过程与q 密切相关。
由式(10)、式(11)和式(17)可得同步发电机的暂态能量为
 (19)
(19)
双馈风电机组和同步机间的能量转移过程可由q值的变化来体现,当q从0变化到p/2时,系统间暂态能量完成一次转移。
虚拟同步控制下,双馈风电机组对于暂态能量的转移效率虽然得到了提升,但暂态能量在系统间仍存在交互流动现象。利用复变量-平均法可得系统的暂态能量转移过程(详细推导过程见附录),如图2所示。
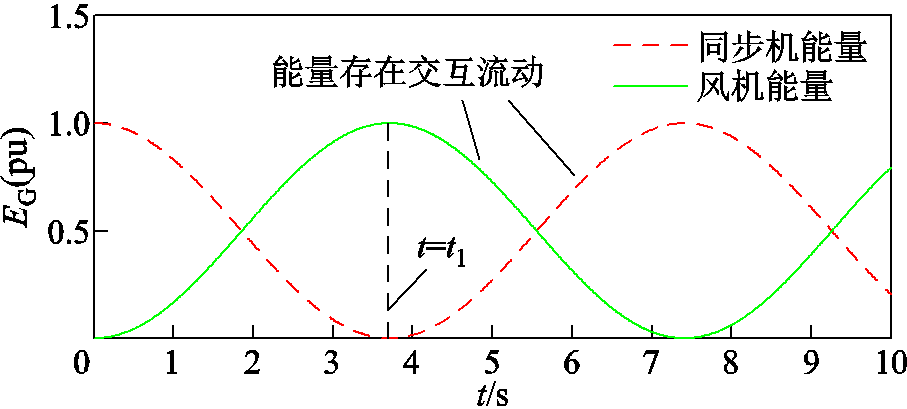
图2 虚拟同步控制下系统暂态能量转移过程
Fig.2 Transient energy transfer process of system under virtual synchronous control
由图2可知,在振荡过程中,风电机组会返送暂态能量,暂态能量在机组间交互流动未实现理想的振荡抑制效果。
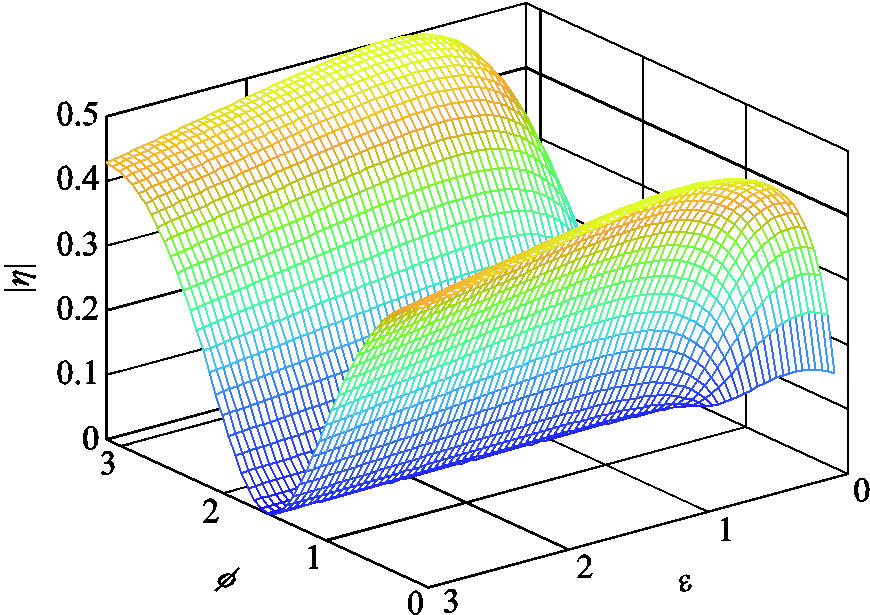
由附录式(A5)~式(A13)可得非线性弹性耦合控制下系统的能量转移过程,如图3所示。图3中,在非线性立方刚度耦合下,系统间暂态能量实现了单向高效转移。
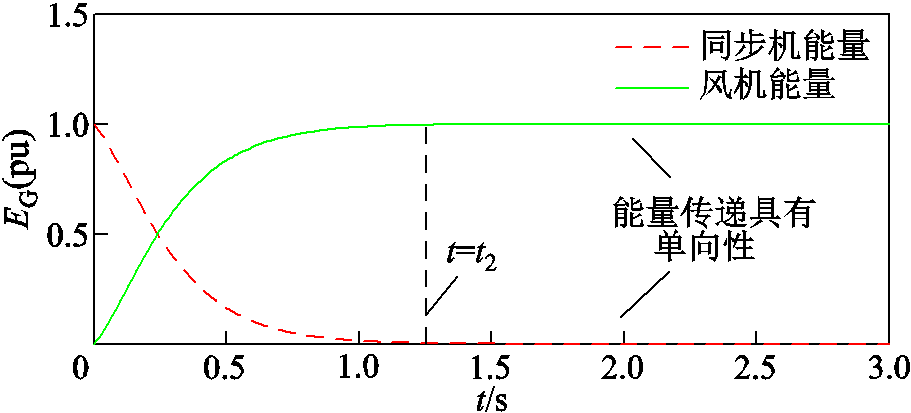
图3 非线性弹性耦合下系统暂态能量转移过程
Fig.3 Transient energy transfer process of systems under nonlinear elastic coupling
如图3所示,在非线性弹性耦合下,同步机与双馈风电机组间的功率转移特性已发生变化。此时,双馈风电机组对于系统功率振荡的抑制能力得到进一步提升,同步机中的暂态能量在非线性立方耦合作用下单向高效转移至双馈风电机组,且不再回流。相较于虚拟同步控制下该过程具有不可逆性。此外,如图2和图3所示,在非线性弹性耦合下时,机组间的暂态能量转移过程更短,t2<t1。因此,同步机暂态能量的衰减速度加快,风机参与系统功率调节的潜力得到有效激发,系统的稳定性得到了进一步提升。
假设初始时刻的暂态能量全部集中在同步机中(q(0)=0),同步机和双馈风电机组间暂态能量转移过程可表示为
 (20)
(20)
当q=p/2时,同步机的暂态能量为0,此时暂态能量全部转移到双馈风电机组。
同步机暂态能量的变化率可表示为
 (21)
(21)
当同步机振动能量为0时,同步机能量变化率也为0,其成立条件为dq/dt=0或者cosq=0。当同步机能量完全转移至双馈风电机组时,cosq =0,下面讨论dq/dt=0的情况。
因为式(14)与无关,所以dq/dt=0等价于dq/d=0,将式(17)代入式(14),令实部和虚部均为0可得
 (22)
(22)
由式(22)可知,当dq/d=0时,f=0或者f=p。当同步机能量变化率为0时,可知cosq =0为机组间能量完全转移的必要条件,下面讨论cosq =0时f的取值。
假设当f=0或f=p时,cosq=0,同步机的暂态能量可以完全转移至风电机组。其中,系统初始时的能量为
 (23)
(23)
将式(23)代入式(18)中,并做极限运算可得
 (24)
(24)
由式(24)可知,当变量 趋近于p/2时有
趋近于p/2时有
 (25)
(25)
式中,“~”表示等价无穷小。因为式(25)中左边项为常数,所以式(25)不成立,进而机组间暂态能量完全转移时 且
且 。因此下面继续讨论0<f<p的情况,式(24)可转换为
。因此下面继续讨论0<f<p的情况,式(24)可转换为
 (26)
(26)
因为当q 趋于p/2时,sin(p/2-q)趋于0,所以式(26)要有意义必须满足
 (27)
(27)
将暂态能量完全转移至风机时的常数n记作n0,由式(27)可得
 (28)
(28)
根据能量守恒定律,将式(23)和式(28)代入式(18),可得
 (29)
(29)
由于 ,所以可得
,所以可得
 (30)
(30)
解得
 (31)
(31)
式(31)表明双馈风电机组与同步机间暂态能量完全转移时惯量比需满足,即为能量完全转移的必要条件。
当引入非线性弹性耦合控制后,取系统参数kn1=0.05,kn2=0.2,由式(18)、式(23)和式(28)可求得系统的相轨迹,如图4所示。
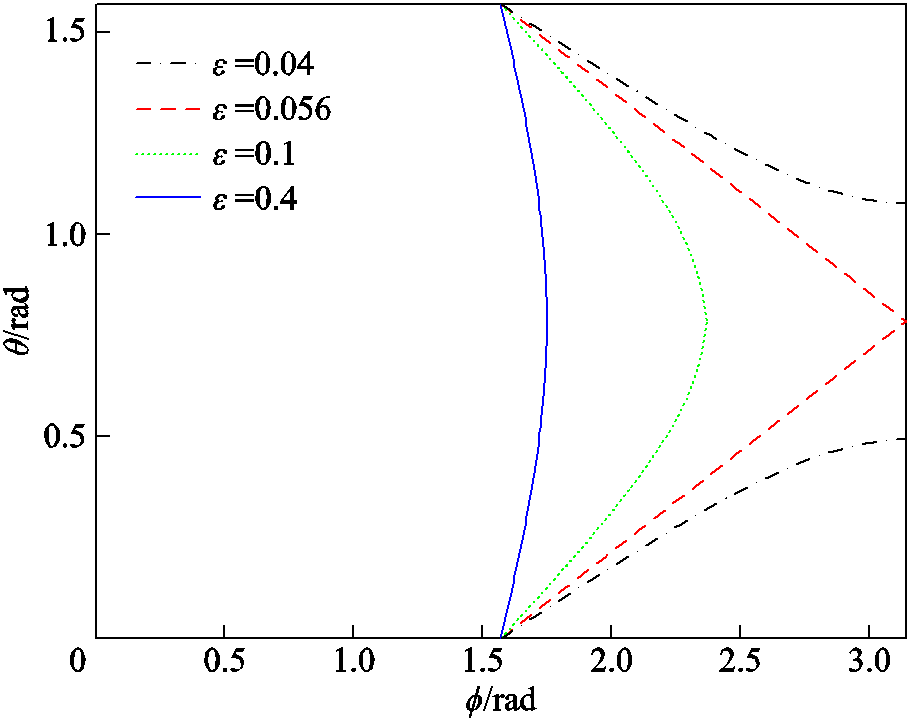
图4 非线性弹性耦合控制下系统相轨迹
Fig.4 System phase trajectory under nonlinear elastic coupling control
由图4可知,引入非线性弹性耦合后,当机组间惯量比满足所求得的能量完成转移条件时,q的值可由0变化至p/2,即完成暂态能量完全转移。而当e=0.04时,其q 值不能由0变化至p/2,即同步机暂态能量无法完全转移至风机。同时,在机组间惯量比取值合适时,非线性弹性耦合下,系统的暂态能量转移效率得到了进一步提升。
双馈风电机组和同步机间暂态能量转移的效率可表示为
 (32)
(32)
由式(18)、式(23)和式(32)可得表征系统暂态能量转移效率的相轨迹,如图5所示。
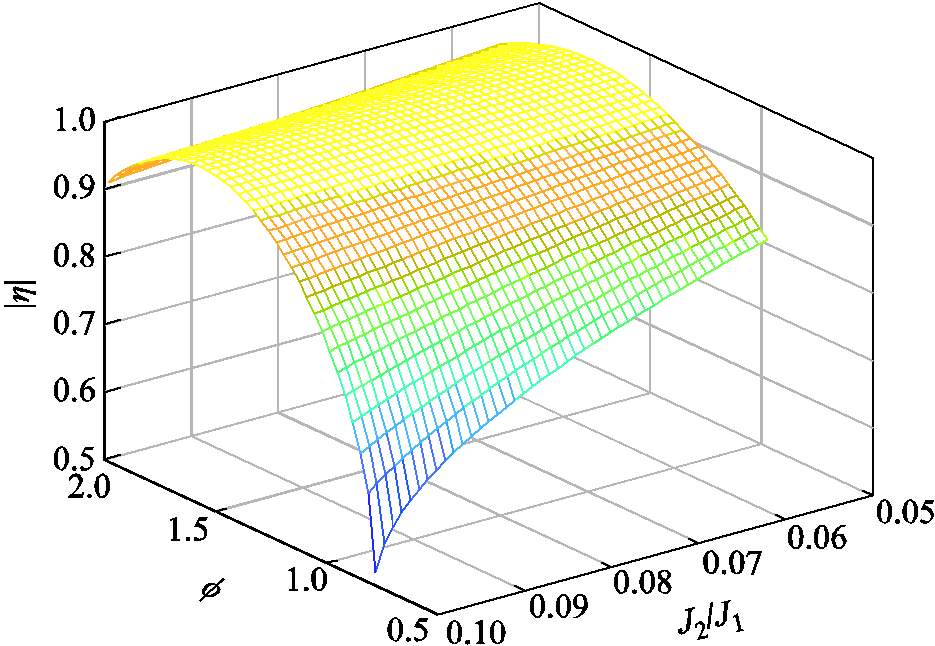
图5 非线性弹性耦合能量转移过程
Fig.5 Nonlinear elastic coupling energy transfer process
由图5可知,当f值满足式(28)中条件时,系统间能量转移效率达到最大,暂态能量实现了完全转移。在非线性弹性耦合控制下,双馈风电机组转移系统暂态能量的效率得到了提升,这将有利于增强其友好并网支撑能力。
对式(8)引入以下变量代换, ,
,  ,
,  ,
,  ,可得
,可得
 (33)
(33)
同时对式(33)进行式(10)~式(12)同理的变换步骤,得到慢变方程为
 (34)
(34)
式中, 。
。
将复变量表示为
 (35)
(35)
同时基于文献[28]中所提,慢变方程趋于平衡状态时有
 (36)
(36)
 (37)
(37)
将式(34)代入式(37),令实虚部等于0,可得
 (38)
(38)
式中,R1和R2分别为系数R1(t1)和R2(t1)的模值。
定义
 (39)
(39)
将式(39)代入式(38),可得
 (40)
(40)
变量E1和E2可分别近似表示同步机和双馈风电机组的暂态能量,取系统参数 ,e =0.4,=1,两者间的关系曲线如图6所示。
,e =0.4,=1,两者间的关系曲线如图6所示。
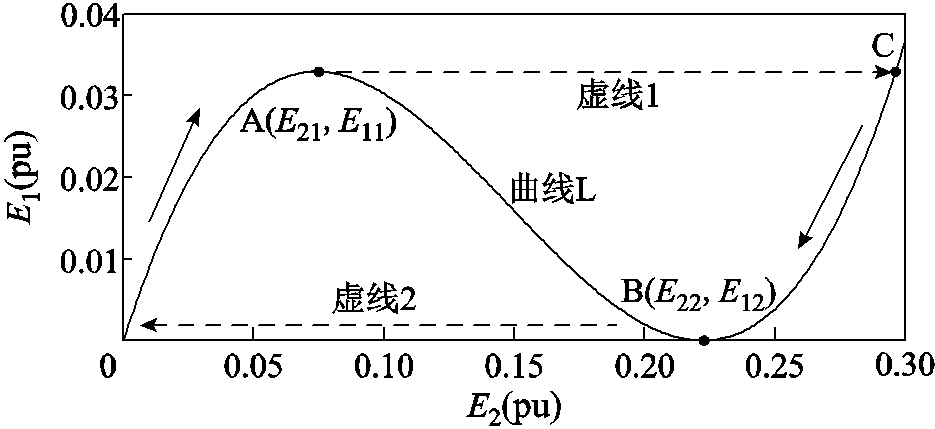
图6 能量转移关系曲线
Fig.6 Energy transfer relationship curve
参考机械动力学分析,引入立方刚度后,图6中系统间能量转移存在非线性跳跃现象,两条虚线1、2之间的曲线L为不稳定区域。在能量转移过程中,若初始能量等于极值点A时,暂态能量将从A点沿虚线1移动至C点,并沿着曲线L移动至极值点B处,最后沿虚线2方向移动至零点处。该过程中,能量的跳跃引起系统暂态能量单向转移至风电机组,并不再返还至同步机,实现了风电机组高效转移暂态能量的效果。其中,极值点A为实现能量完全转移的临界点,对式(40)求导可得
 (41)
(41)
令式(41)等于0,可求得
 (42)
(42)
将E21代入式(40)中,可得第一个极值点对应的E11值。
而由式(39)可得
 (43)
(43)
由式(10)可知,对于变量 有
有
 (44)
(44)
将系统参数代入式(43)中,可确定一个立方刚度值。此时,系统暂态能量实现完全转移,即该立方刚度为最优刚度值。
当风电机组与同步机之间的惯量比设置满足能量完全转移的必要条件后,进一步利用式(43)获得最优刚度,即可完成实现机组间能量完全转移所需的控制参数设计,从而确保所提控制对功率振荡的抑制效果。
采用非线性弹性耦合后,双馈风电机组的并网主动支撑控制系统结构如图7所示。
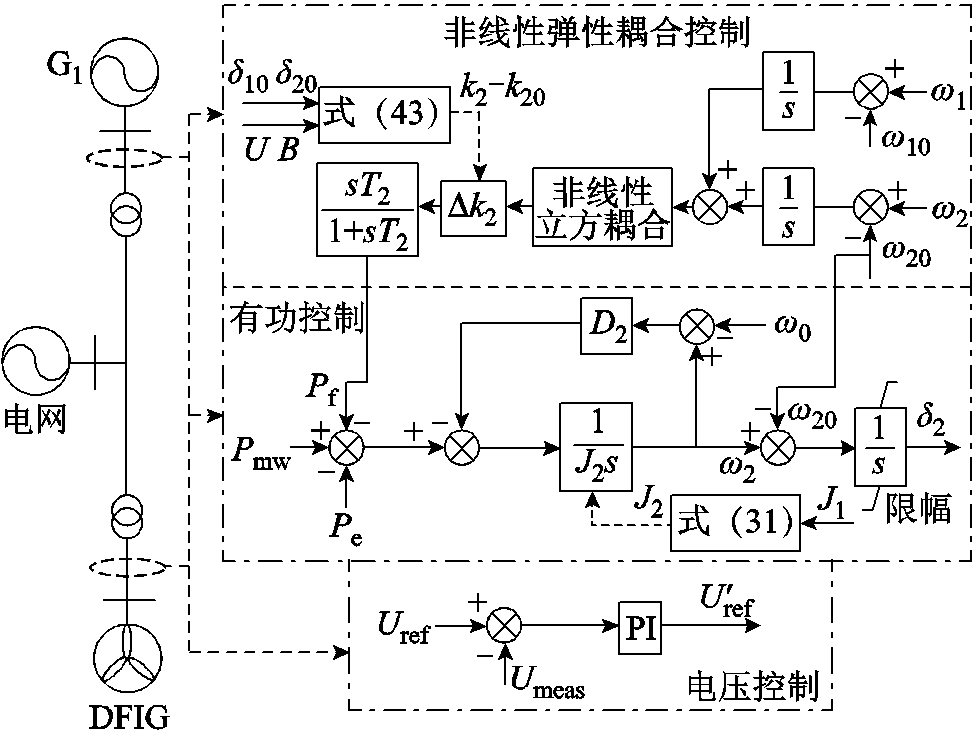
图7 双馈风电机组的并网主动支撑控制系统结构
Fig.7 Grid-connected active support control system structure of doubly-fed wind turbine
控制器主要包括非线性弹性耦合、虚拟惯量、阻尼及电压控制环节。控制器中关键参数的设置过程及控制流程如下。
在虚拟惯量控制环节中,通过同步机惯量J1和式(31)可计算获得双馈风电机组虚拟惯量J2的最佳取值范围,并输入有功控制环节。
在非线性刚度控制环节中,通过测量同步机和双馈风电机组的母线电压以及功角初值,计算获得系统的初始刚度值 ,再与式(43)中所求最优刚度值作差得到附加刚度
,再与式(43)中所求最优刚度值作差得到附加刚度 ,并输入非线性弹性耦合控制环节。通过上述控制流程保证非线性弹性耦合控制器实现系统间能量完全转移,进而高效抑制功率振荡。在实际系统中,同步机的功角可通过测量并网点处的电压相角来获取,无需建立远距离通信,有利于降低工程应用难度。若在含多双馈风电场的复杂电网中,所提控制策略是否需要广域测量,还需要进一步验证,这将是论文下一步的重点关注问题。
,并输入非线性弹性耦合控制环节。通过上述控制流程保证非线性弹性耦合控制器实现系统间能量完全转移,进而高效抑制功率振荡。在实际系统中,同步机的功角可通过测量并网点处的电压相角来获取,无需建立远距离通信,有利于降低工程应用难度。若在含多双馈风电场的复杂电网中,所提控制策略是否需要广域测量,还需要进一步验证,这将是论文下一步的重点关注问题。
在非线性弹性耦合控制环节中,双馈风电机组和同步机之间建立了非线性功率耦合关系。虚拟转速w2与其初始值 作差,再经积分环节,得到风电机组的功角Dd2。同理,可得同步机的功角Dd1。机组间功角差Dd2-Dd1经过非线性立方耦合以及参数整定环节生成非线性刚度后,产生新的非线性耦合功率
作差,再经积分环节,得到风电机组的功角Dd2。同理,可得同步机的功角Dd1。机组间功角差Dd2-Dd1经过非线性立方耦合以及参数整定环节生成非线性刚度后,产生新的非线性耦合功率 。最后,经过隔直环节输入有功控制系统。
。最后,经过隔直环节输入有功控制系统。
在有功控制环节中,为保证风电并网的主动支撑性能,采用转子二阶方程,包含了虚拟惯量和阻尼控制,保留了构网型控制的基本结构[29-31],有利于降低工程应用难度。为保证高效转移暂态能量,虚拟惯量的设置需满足所求得的能量完成转移的必要条件,由同步机惯量J1和式(31)可求得双馈风电机组虚拟惯量J2的最佳取值范围。由该过程设置的虚拟惯量以及非线性弹性耦合环节输入的非线性功率,可进一步优化控制过程,并生成新的虚拟转子角,提升风电机组对于系统功率的主动支撑性能。同时,为了保障风电机组并网的安全可靠性,在非线性弹性耦合控制的矢量变换环节后,可增设虚拟电阻模块[32-33],以避免电流的突变。
此外,并网支撑系统还包含电压控制环节,电压参考值 与测量值
与测量值 作差,再经过PI控制模块,生成新的电压参考值。所提非线性弹性耦合控制与电压控制解耦,在换流器裕度充足的情况下不影响电压支撑控制性能。同时,本文所提的非线性弹性耦合控制灵活可控,且无需建立机组间的通信,降低了工程应用难度。
作差,再经过PI控制模块,生成新的电压参考值。所提非线性弹性耦合控制与电压控制解耦,在换流器裕度充足的情况下不影响电压支撑控制性能。同时,本文所提的非线性弹性耦合控制灵活可控,且无需建立机组间的通信,降低了工程应用难度。
如图7所示,增设非线性弹性耦合控制环节后,风电机组和同步机之间将建立新的功率耦合关系,为风电机组高效率转移暂态能量开辟了新的路径,可有效提升其对系统稳定性的主动支撑性能。
为验证所提非线性弹性耦合下双馈风电机组的暂态能量转移效果,在DIgSILENT/PowerFactory仿真软件中,搭建风电高比例区域电网仿真系统,其拓扑结构如图8所示。其中,包含1个额定容量为200 MW的双馈风电场,采用单机倍乘模型,包含100台2 MW的DFIG,和三个火电厂(G1, G2和G3),容量分别为300、200和120 MW。负荷LA、LB、LC分别为130、190和120 MW。仿真系统中,风电场和火电厂均为等值机组。风电渗透率为风电场和火电厂的容量比,约为24.4%。本文所采用的IEEE 3机9节点仿真系统可用于风电高渗透率区域电网的机电暂态仿真。
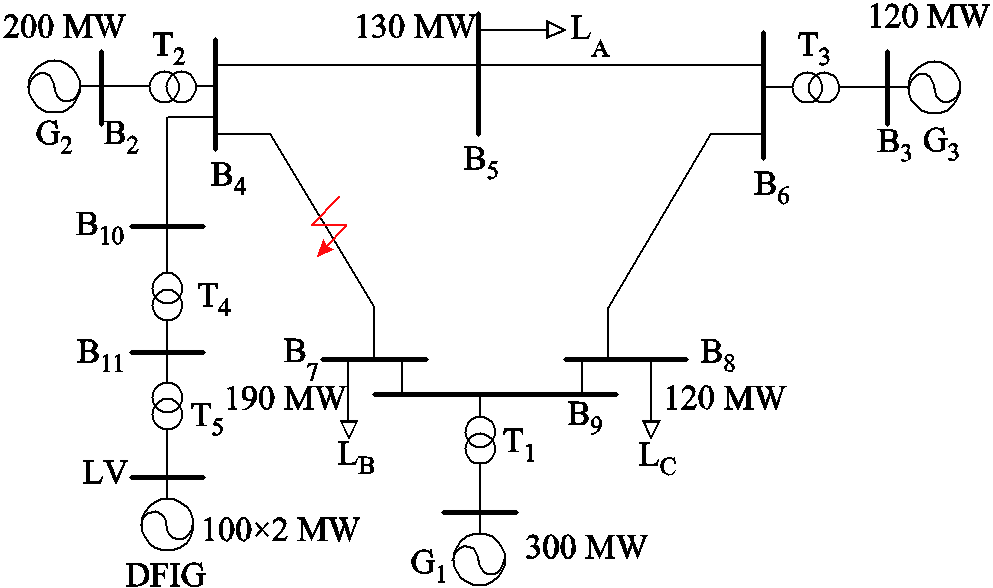
图8 风电高比例区域电网拓扑结构
Fig.8 Topology structure of regional power grid with high proportion of wind power
为确保所提控制的功率振荡抑制效果,首先基于所求能量转移的必要条件,即式(31),并结合同步机的惯量,设置双馈风电机组的虚拟惯量参数;其次,依据式(43)所求最优立方刚度,并结合算例系统参数求得具体刚度值;最后,将设置好的虚拟惯量和立方刚度输入控制器,以实现系统功率振荡抑制。
为验证非线性弹性耦合控制下所提能量完全转移的必要条件,设置2 s时母线B4与母线B7间线路发生三相短路,2.1 s时清除短路,得到非线性弹性耦合控制下不同惯量参数时的同步机G2的功率响应如图9所示。
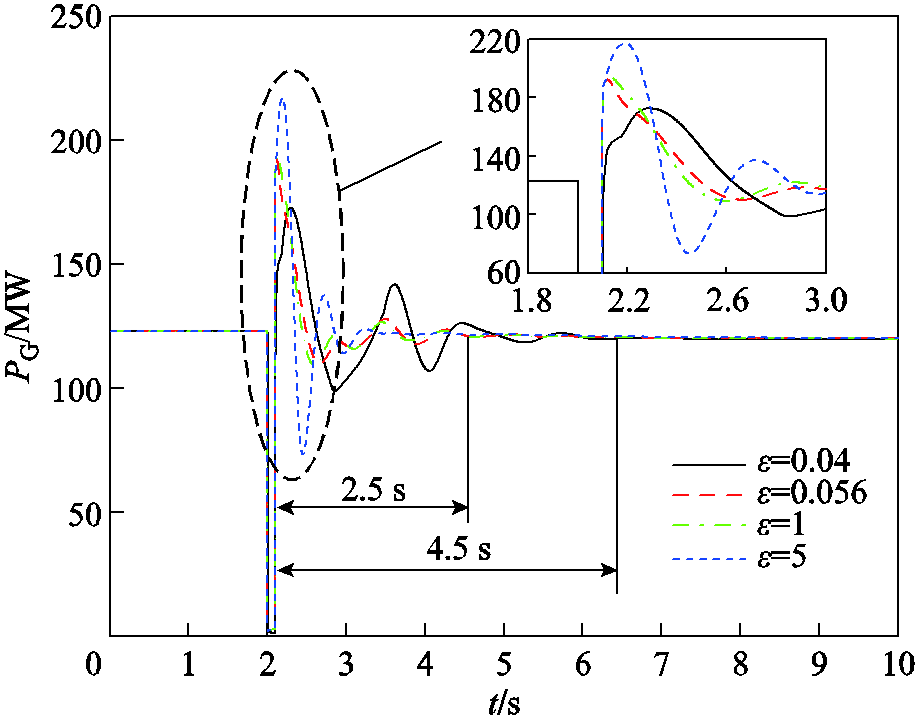
图9 惯量参数不同时G2的功率响应
Fig.9 The power response of G2 with different inertia parameters
由图9可知,当双馈风电机组与同步机间惯量比为0.04,小于0.056时,其对于功率振荡的抑制效果变差,同步机功率振荡幅值较大,且功率稳定时间为6.5 s。当机组间惯量比取值满足式(31)条件时,双馈风电机组对于系统功率振荡的抑制效果较好。此时,同步机功率振幅较小,功率稳定时间缩短至4.5 s。然而,虚拟惯量设置较大时,也会对系统稳定性构成威胁,当机组间惯量比由1增加至5时,功率振荡幅值较惯量比为1时有所增加,二者波峰处相差24 MW,波谷处相差36 MW。
为验证风电机组与同步机之间的非线性弹性耦合对系统能量转移的影响,设置2 s时母线B4与母线B7间线路发生三相短路,2.1 s时清除短路。在满足能量完全转移必要条件的基础上,取双馈风电机组虚拟惯量参数为J2=1.2(pu),系统参数k3=1,e =0.4,由式(43)可求得立方刚度最优值为0.04。立方刚度取值从0增加至0.06,同步机G2、双馈风电机组的功率响应如图10、图11所示。
图10 立方刚度不同时G2的功率响应
Fig.10 The power response of G2 with different cubic stiffness
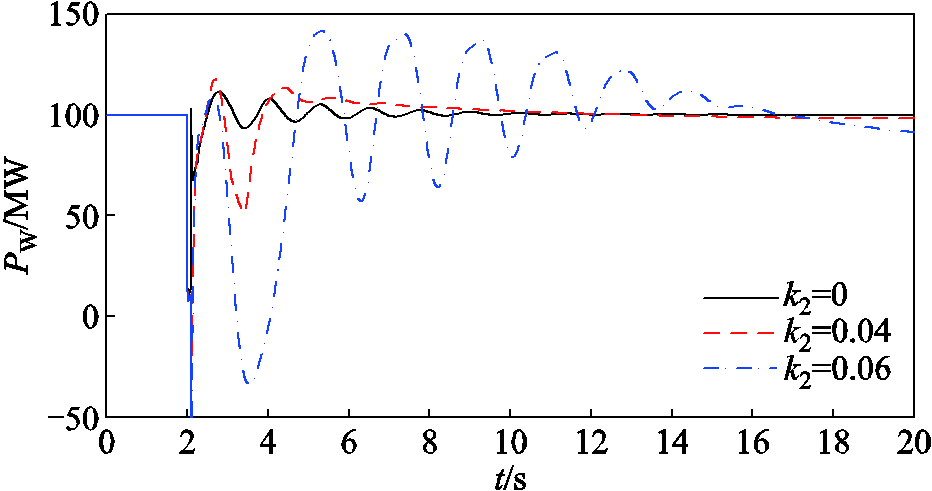
图11 立方刚度不同时双馈风电机组的功率响应
Fig.11 Power response of doubly-fed wind turbine with different cubic stiffness
由图10、图11可知,当立方刚度为0时,同步机功率振荡幅值为168 MW,振荡持续时间为 11 s。逐渐增大立方刚度至0.04时,在非线性弹性耦合下,双馈风机调整功率建立高效转移的能量转移路径,同步机功率振荡幅值减小至159 MW,并且振荡持续时间缩短至5 s,系统稳定性进一步提高。然而,当立方刚度继续增大至0.06时,双馈风电机组功率波形幅度增加,但能量转移效果不佳,导致5 s时同步机再次出现功率振荡,系统稳定性反而下降。
由测试结果可以看出,引入非线性弹性耦合控制后,需对机组惯量比和立方刚度参数进行合理设置,以高效转移系统暂态能量,实现最佳功率振荡抑制效果。
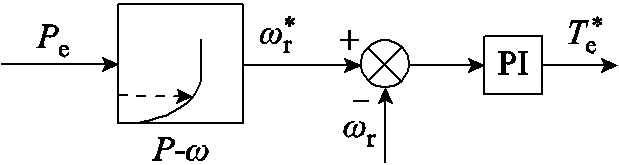
当双馈风电机组分别处于最大功率追踪控制、虚拟同步控制和非线性弹性耦合控制下时,使用QR/QZ法,计算系统的关键振荡模态,对系统的阻尼特性进行分析,最大功率追踪控制框图如附图1所示,测试结果见表1~表3和图12。
由模态1~3的参与因子相量图可知,模态1与同步机G1、G2和G3相关;模态2则与同步机G2和G3有关;模态3主要取决于风电机组。
表1 最大功率追踪控制时系统模态
Tab.1 System mode in maximum power tracking control

振荡模态特征值阻尼频率/Hz阻尼比 模态1-0.112 1+j5.056 60.804 80.022 1 模态2-0.996 5+j8.755 31.393 50.113 1 模态3-0.802 3+j13.668 72.175 40.058 6
表2 虚拟同步控制时系统模态
Tab.2 System mode in virtual synchronous control

振荡模态特征值阻尼频率/Hz阻尼比 模态1-0.528 1+j5.104 00.812 30.102 9 模态2-1.066 4+j8.737 91.390 70.121 1 模态3-0.802 0+j13.665 62.175 00.058 6
表3 非线性弹性耦合控制时系统模态
Tab.3 System mode in nonlinear elastic coupling control

振荡模态特征值阻尼频率/Hz阻尼比 模态1-1.350 1+j5.242 30.834 30.249 4 模态2-1.195 4+j8.667 51.379 50.136 6 模态3-0.801 1+j13.660 22.174 10.058 5
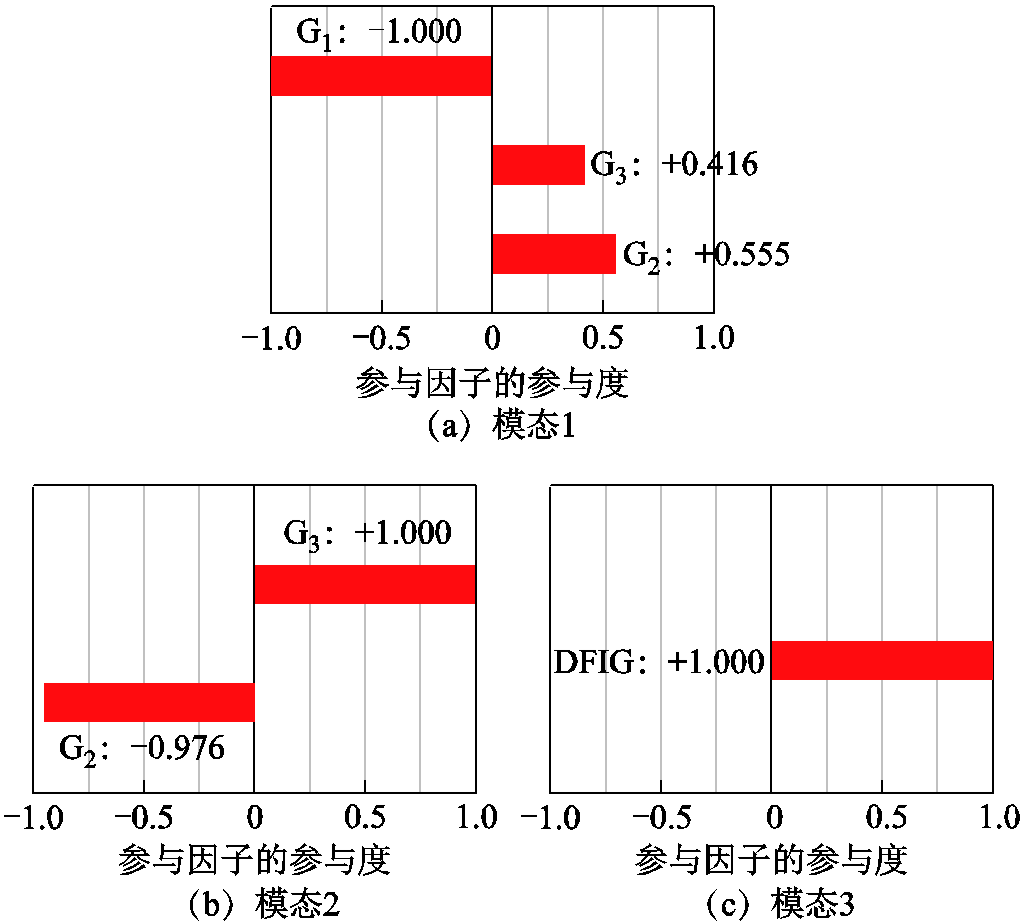
图12 模态1~3的参与因子相量图
Fig.12 Participation factor phasor diagram of modes 1~3
由表1~表3可知,当双馈风电机组处于最大功率追踪控制时,系统的振荡模态阻尼较差,其中系统关键模态1阻尼比仅为0.022 1。采用虚拟同步控制后,模态1的阻尼比增大至0.102 9;模态2阻尼比略微增大;模态3基本不变。引入非线性弹性耦合控制后,模态1阻尼比增大至0.249 4,其改善阻尼比效果约为虚拟同步的2倍;模态2阻尼比略微增大;模态3基本不变。由模态分析结果可知,由非线性弹性耦合有效地改善了系统衰减特性,使风电机组的振荡功率转移能力得到了显著提升。
为验证非线性弹性耦合下双馈风电机组对于系统频率的支撑作用,设置2 s时负荷LB突增10%,双馈风电机组分别采用最大功率追踪控制、虚拟同步控制和非线性弹性耦合控制时,系统动态响应如图13~图15所示。
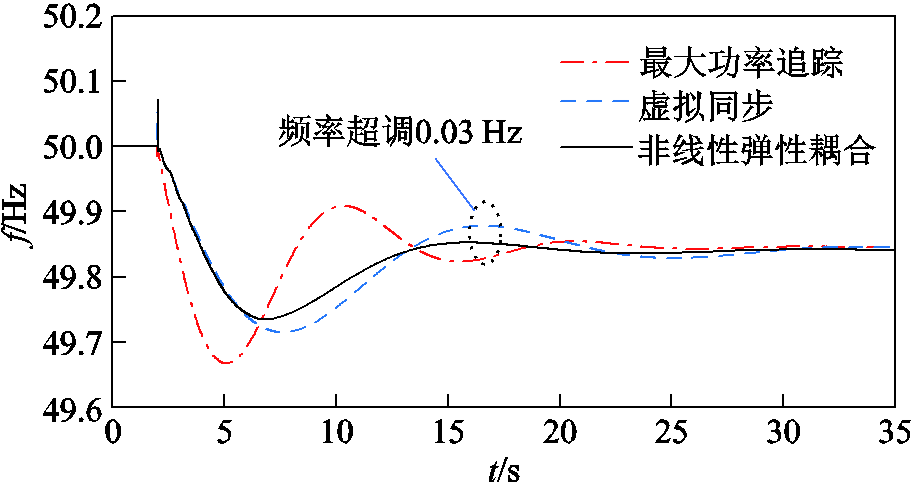
图13 负荷突增时系统频率的动态响应
Fig.13 Dynamic response of the system frequency during sudden load increase
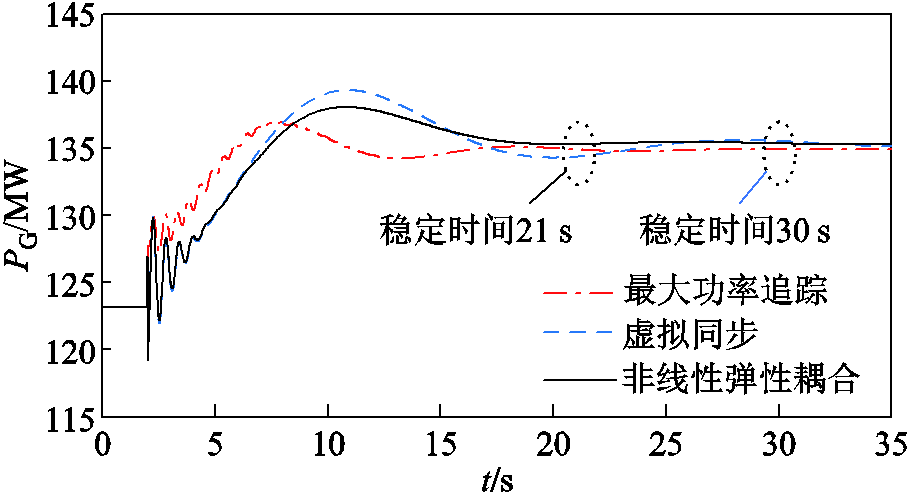
图14 负荷突增时同步机G2的功率响应
Fig.14 Power response of synchronous generator G2 during sudden load increase
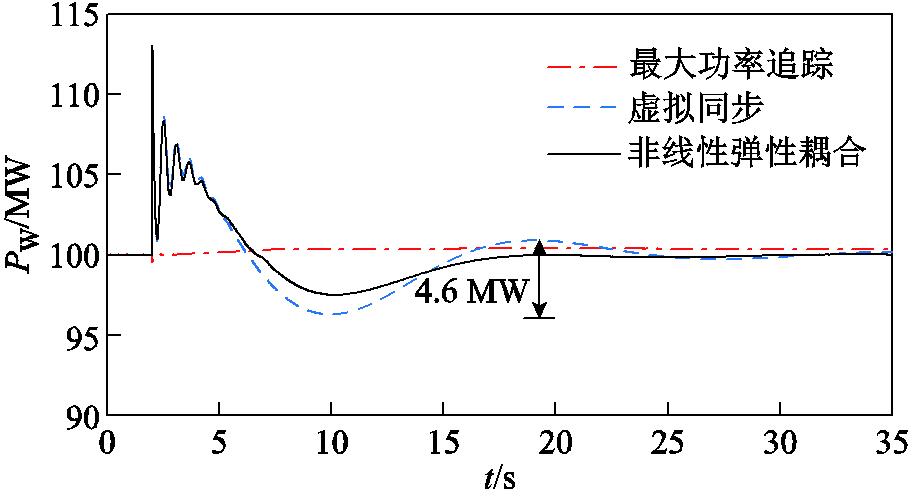
图15 负荷突增时双馈风电机组的功率响应
Fig.15 Power response of doubly-fed wind turbine during sudden load increase
由图13可知,处于最大功率追踪控制时,双馈风电机组不响应频率变化,导致系统频率明显降低,跌落至49.66 Hz。引入虚拟同步控制后,虚拟惯量对系统频率起到了支撑作用,系统频率降低至49.72 Hz,频率的降低幅度有所减小,但频率稳定时间延长至33 s,且频率仍存在0.03 Hz的超调量。引入非线性弹性耦合控制后,双馈风机对于频率的支撑能力得到增强,系统频率下降至49.73 Hz,且减小了频率的超调量。
如图14所示,引入虚拟同步控制后,风电机组通过虚拟惯量响应分担了同步机功率支撑任务。然而,在非线性弹性耦合控制下,不仅在频率跌落期间,同步机功率显著下降,并且在频率恢复期,同步机功率振荡幅值减小,功率稳定时间缩短至21 s。
如图15所示,引入虚拟同步控制后,双馈风电机组与同步机处于同步振荡模式中,其功率波动幅度最大为4.6 MW。在所提控制策略下,双馈风电机组的功率波动幅度减小,且功率稳定时间减少至 23 s。综上所述,增设非线性弹性耦合后,风电机组对系统频率的支撑作用更加理想。
为验证所提控制对系统功率振荡抑制的高效性,设置2 s时线路4-7发生三相短路故障,0.1 s后清除短路。双馈风电机组分别采用最大功率追踪控制、虚拟同步控制和非线性弹性耦合控制时,同步机G1、G2、G3和双馈风电机组的响应如图16~图21所示。
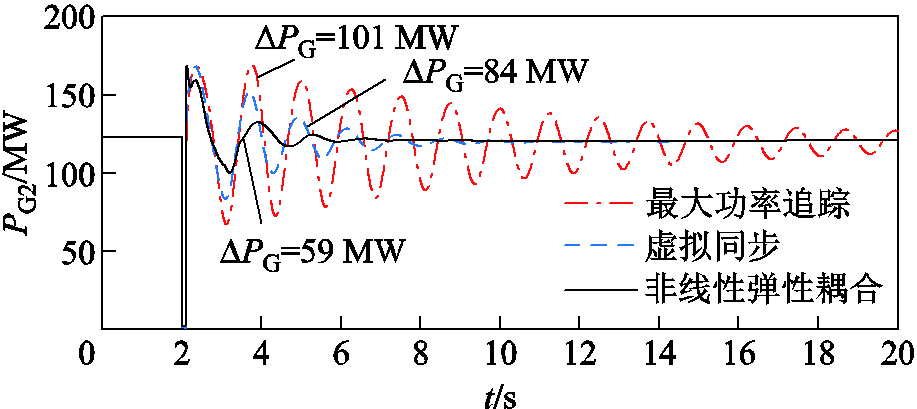
图16 短路时G2的功率响应
Fig.16 The power response of G2 during short circuit
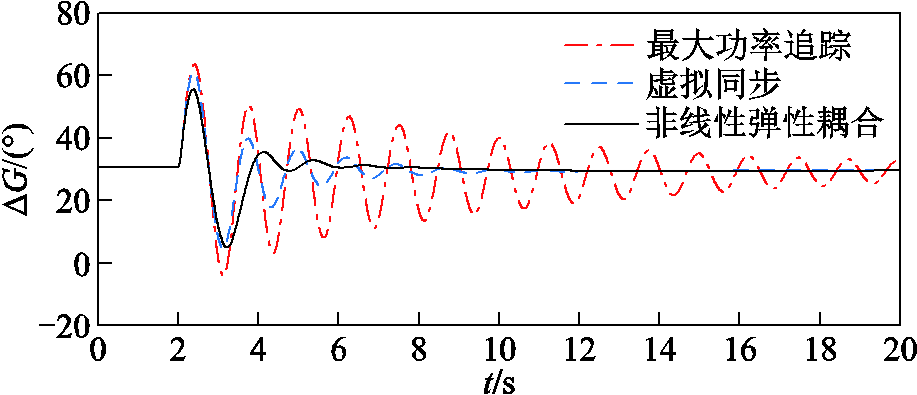
图17 短路时G2的功角响应
Fig.17 The power angle response of G2 during short circuit
如图20、图21所示,在非线性弹性耦合控制下,同步机G1和G3的功率振荡幅值均得到有效减小,同时,系统的振荡衰减速度加快,显著提升了多机系统的稳定性。测试结果表明,所提控制能够有效抑制不同模态的振荡,这也进一步验证了模态分析结果的正确性。
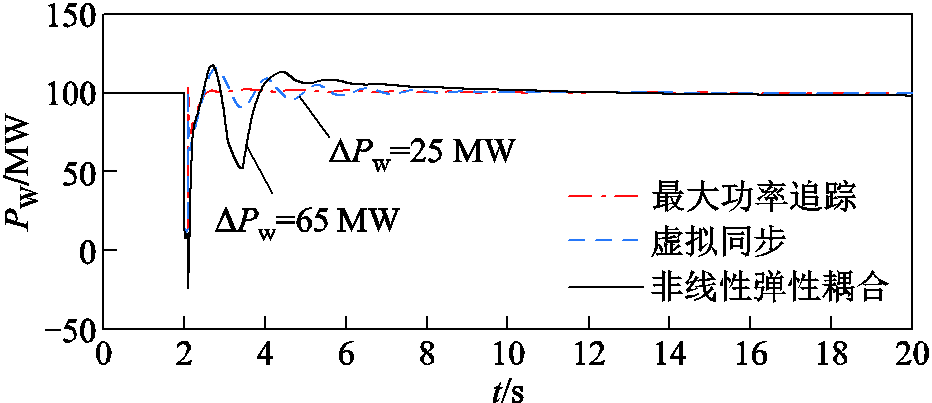
图18 短路时双馈风电机组的功率响应
Fig.18 The power response of doubly-fed wind turbine during short circuit
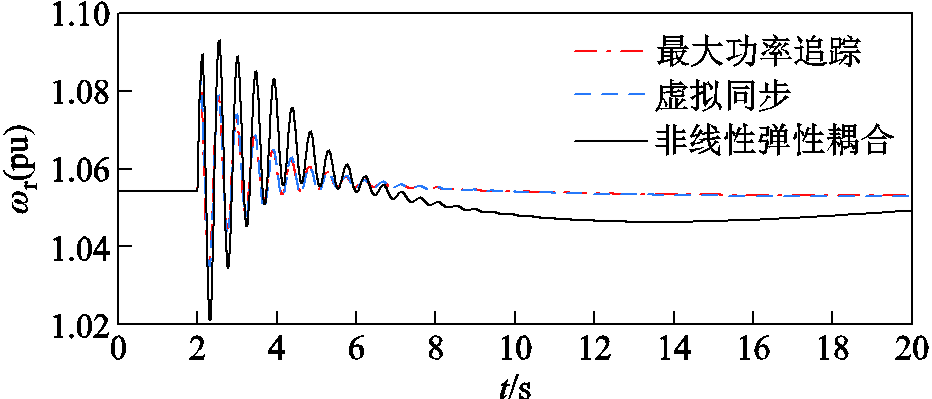
图19 短路时双馈风电机组的转速响应
Fig.19 Speed response of doubly-fed wind turbine during short circuit
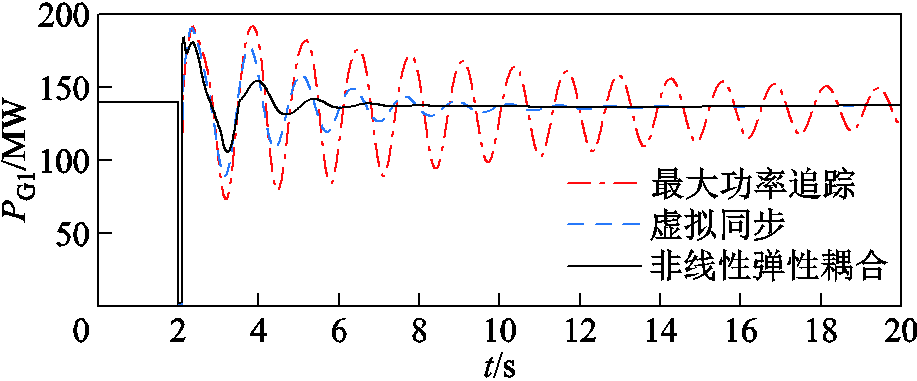
图20 短路时G1的功率响应
Fig.20 The power response of G1 during short circuit
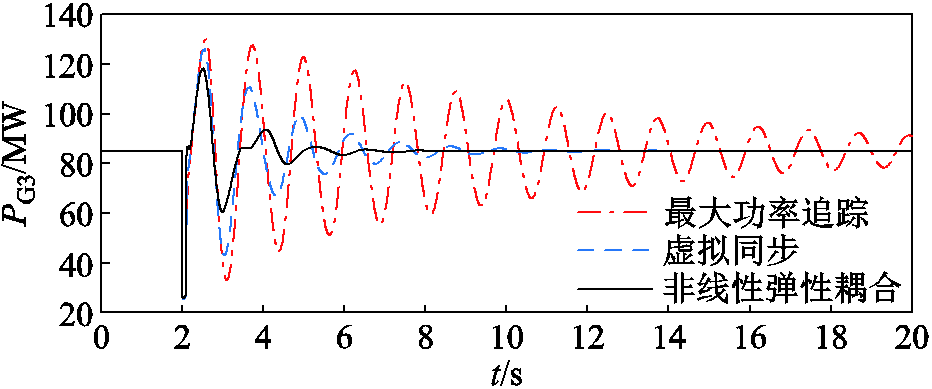
图21 短路时G3的功率响应
Fig.21 The power response of G3 during short circuit
故障期间,风电机组与同步机之间不需要保持虚拟弹性连接,提升其故障穿越性能。因此,本文假定风电机组已具备了故障穿越能力,所提控制策略更加关注故障发生后的系统持续性功率振荡,所以不再考虑故障期间的故障穿越曲线。
由图16~图18可知,最大功率追踪控制时,双馈风电机组几乎不响应功率振荡。短路故障清除后,同步机G2功率持续振荡,振荡时间达20 s以上。引入虚拟同步控制后,双馈风电机组利用阻尼控制在一定程度上抑制了系统功率振荡,振荡持续时间缩短至12 s。引入非线性弹性耦合后,双馈风电机组不再处于同步运行模式,风机对于系统功率的支撑潜力得到有效释放。故障清除后,同步机G2功率振荡幅值由169 MW减小至159 MW。同步机G2功角最大振幅减少5°,功角振荡衰减速度加快,缩短至7 s。非线性弹性耦合控制下,双馈风电机组转移同步机的暂态能量至自身,导致功率振幅及转速增大,在机械载荷允许情况下,所提控制可以更有效地激发双馈风电机组功率振荡抑制的主动支撑潜力。
为进一步验证0.04 s的通信延时影响,在非线性弹性耦合控制中增加了惯性滞后环节,以模拟通信延迟,测试结果如图22所示。
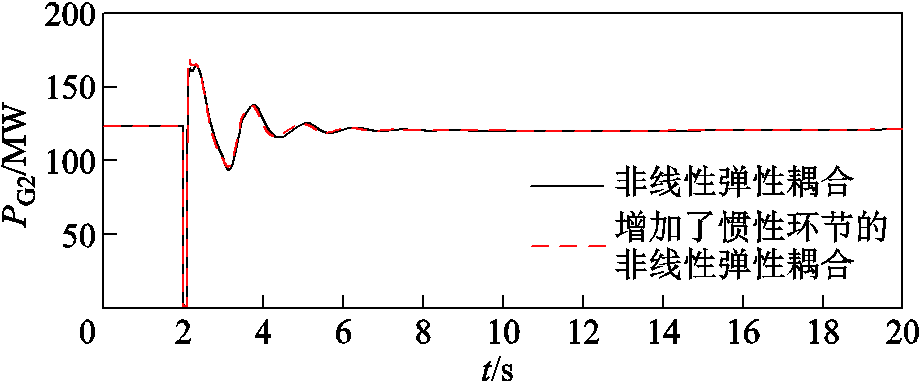
图22 通信延时对所提控制的影响
Fig.22 The influence of communication delay on the proposed control
从图22中可以看出,通信延时对非线性弹性耦合控制的振荡抑制效果影响较小。
为验证非线性弹性耦合单向转移暂态能量的高效性,设置2 s时负荷LB发生幅值为10 MW、频率为0.8 Hz的正弦功率扰动,表示为L=10sin(2p×0.8t),扰动持续23 s后清除。双馈风电机组分别采用最大功率追踪控制、虚拟同步控制和非线性弹性耦合控制时,系统的动态响应如图23、图24所示。
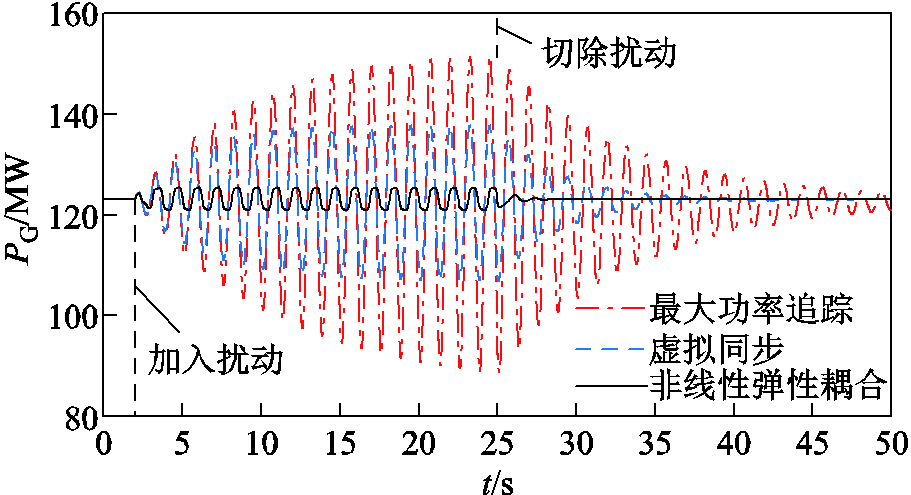
图23 加入扰动时G2功率的动态响应
Fig.23 Dynamic response of G2 power when disturbance is added
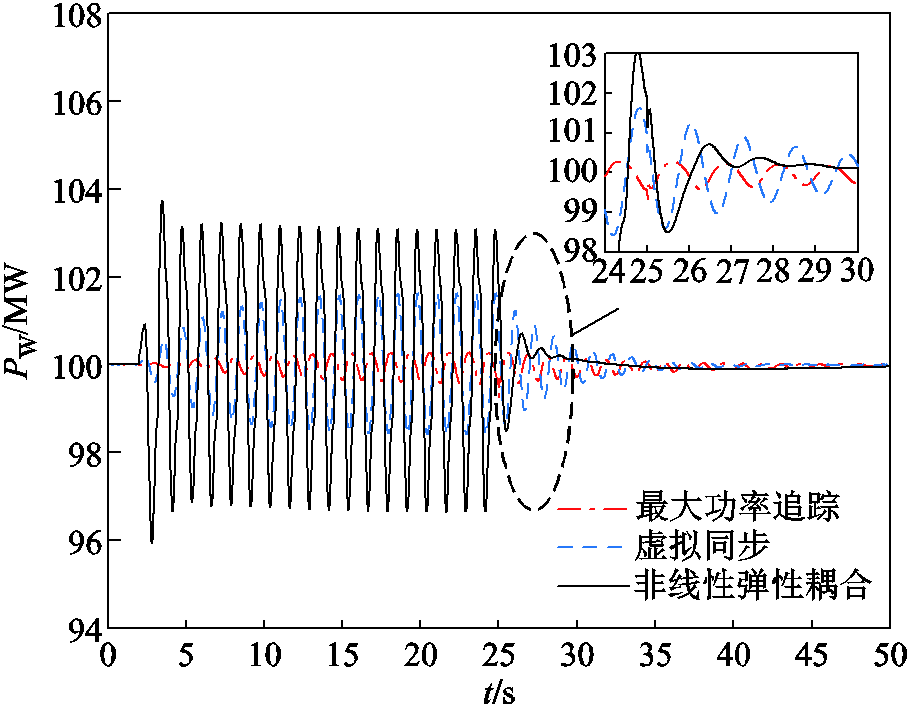
图24 加入扰动时双馈风电机组的功率响应
Fig.24 Power response of doubly-fed wind turbine when disturbance is added
由图23、图24可知,2 s加入扰动后,在最大功率追踪下,双馈风电机组不响应系统功率变化,同步机功率由123 MW增幅振荡至151 MW,25 s扰动切除后,功率仍持续振荡至50 s。虚拟同步控制对功率振荡具有抑制作用,振幅有所降低,但功率振荡幅度依然较大。引入非线性弹性耦合后,双馈风电机组单向高效转移暂态能量,同步机功率振幅显著减小,振荡幅度仅为2 MW,且扰动切除后3 s,同步机和双馈风电机组即可恢复稳定。
为进一步验证附加非线性弹性耦合对于不同扰动频率诱发谐振的抑制效果,改变参考电机G1的惯性时间常数,使系统固有频率分别变为0.3、1.3、1.8 Hz。设置2 s时,负荷LB发生幅值为10 MW,频率分别为0.3、1.3、1.8 Hz的正弦功率扰动,扰动持续23 s后清除。双馈风电机组采用最大功率追踪控制,虚拟同步控制和非线性弹性耦合控制时的系统动态响应如图25~图30所示。
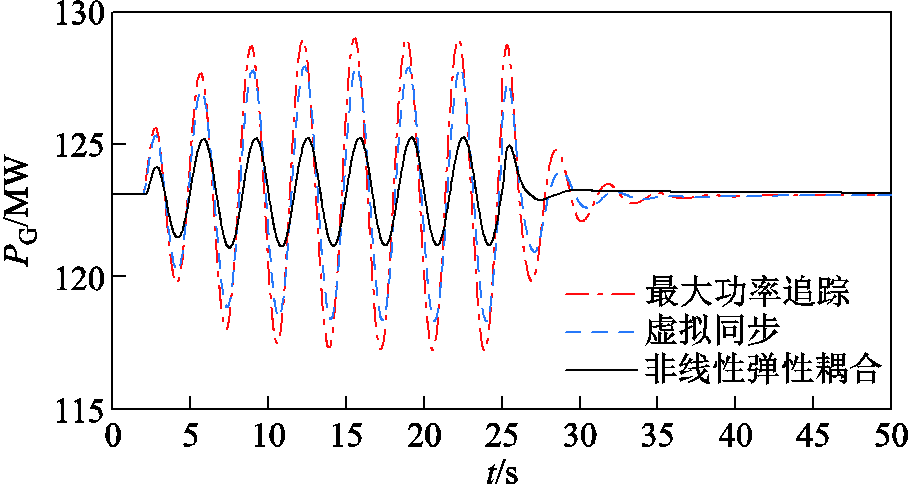
图25 扰动频率为0.3 Hz时G2功率的动态响应
Fig.25 Dynamic response of G2 power with a disturbance frequency of 0.3 Hz
如图25、图26所示,无附加控制下,扰动出现后,同步机功率振荡幅值由123 MW增至129 MW,切除扰动后,功率振荡持续至38 s。虚拟同步控制下,功率振荡幅值降低至127.9 MW,但仍持续振荡至35 s。非线性弹性耦合控制下,双馈风电机组功率调节效果更加显著,同步机功率振荡幅值降低至125 MW,且扰动切除后5 s内即可恢复稳定。
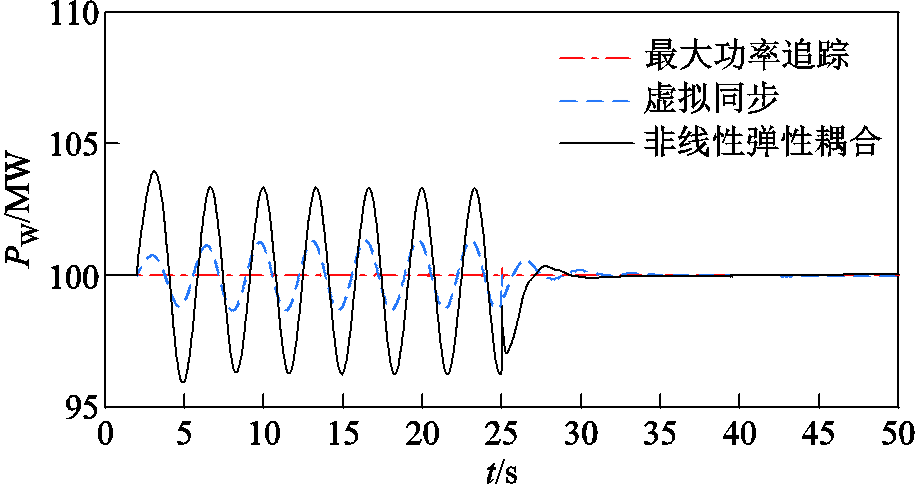
图26 扰动频率为0.3 Hz时双馈风电机组的功率响应
Fig.26 Power response of doubly-fed wind turbine with a disturbance frequency of 0.3 Hz
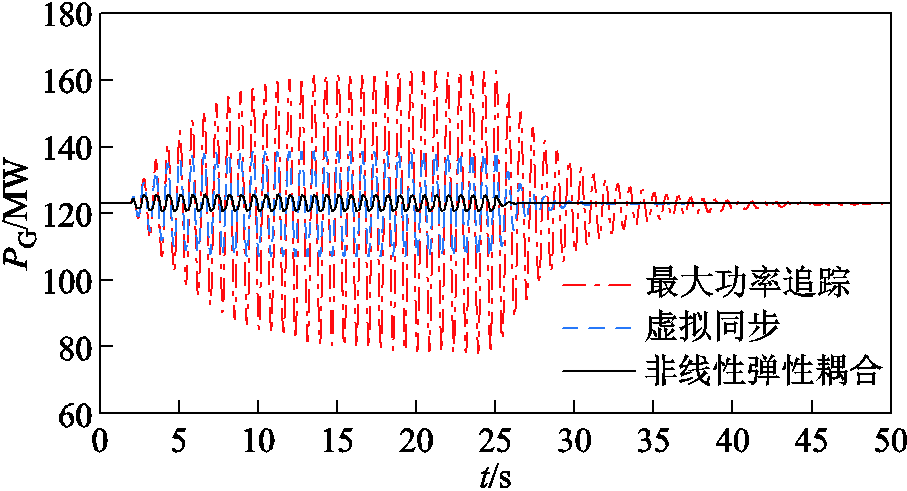
图27 扰动频率为1.3 Hz时G2功率的动态响应
Fig.27 Dynamic response of G2 power with a disturbance frequency of 1.3 Hz
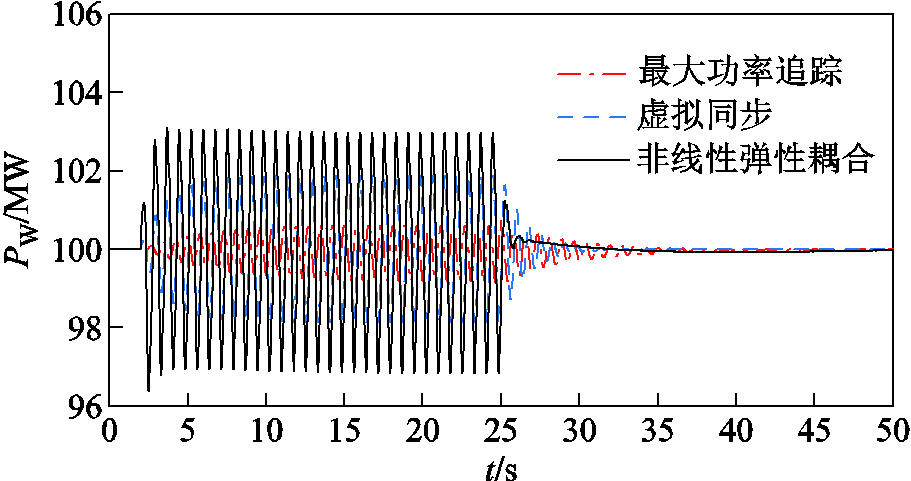
图28 扰动频率为1.3 Hz时双馈风电机组的功率响应
Fig.28 Power response of doubly-fed wind turbine with a disturbance frequency of 1.3 Hz
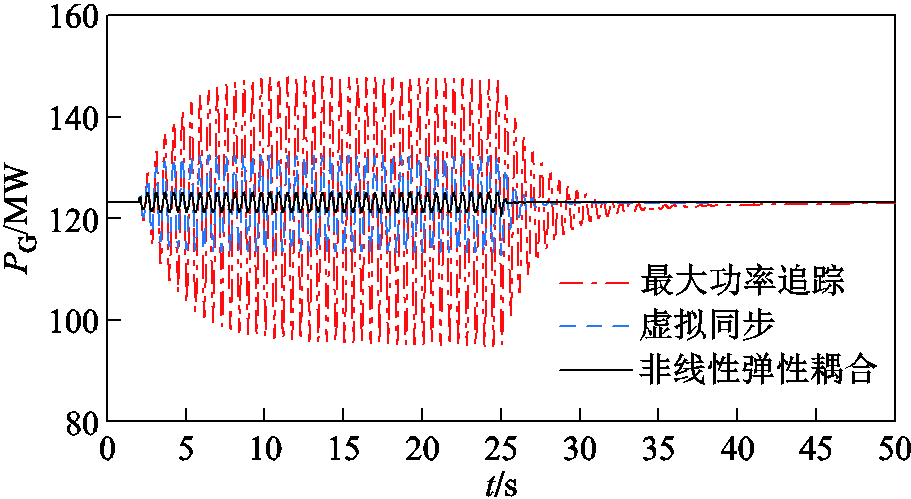
图29 扰动频率为1.8 Hz时G2功率的动态响应
Fig.29 Dynamic response of G2 power with a disturbance frequency of 1.8 Hz
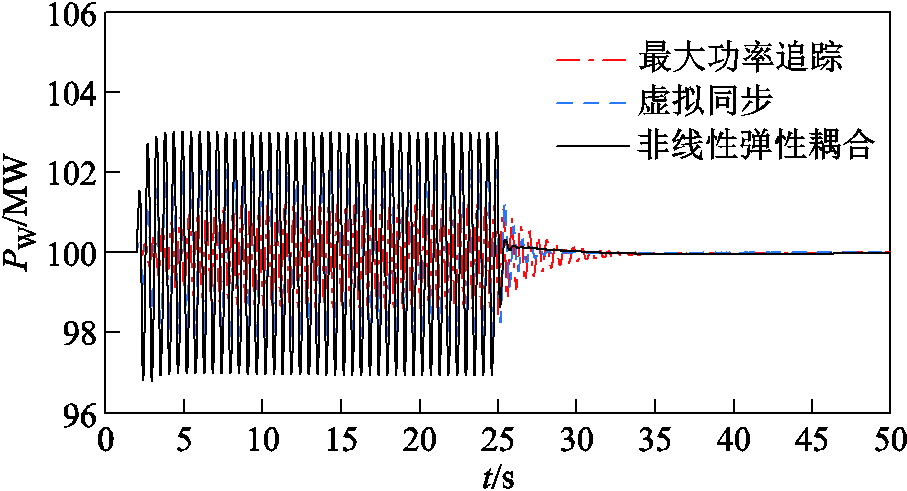
图30 扰动频率为1.8 Hz时双馈风电机组的功率响应
Fig.30 Power response of doubly-fed wind turbine with a disturbance frequency of 1.8 Hz
如图27、图28所示,系统固有频率为1.3 Hz时,加入虚拟同步控制后,同步机功率振荡幅值由最大功率追踪控制时的162.9 MW降低至138.8 MW,但振荡幅度仍较大,双馈风电机组抑制谐振能力有待提升。在所提控制下,由于非线性立方耦合作用,双馈风电机组高效转移暂态能量,同步机功率振荡幅值降低至125.6 MW,扰动切除后,1s内即可恢复稳定。
如图29、图30所示,系统固有频率为1.8 Hz时,双馈风电机组采用最大功率追踪和虚拟同步控制时,同步机功率振荡幅值分别为147.4 MW和132.3 MW,振荡幅度较大。采用非线性耦合控制后,功率振荡幅度减小至2.1 MW,切除扰动后恢复稳定时间仅为1 s,有效地提升了系统的稳定性。
由上述测试结果可以看出,虚拟同步控制由于抑振带宽不足,仅在系统固有频率为0.3 Hz时具有较好的振荡抑制效果。当扰动频率提升至1.3 Hz和1.8 Hz时,虚拟同步机对于系统谐振的抑制能力不足,系统功率振荡仍较为严重。引入非线性弹性耦合后,双馈风电机组在较宽的频带范围内,均能有效抑制系统谐振,且功率恢复稳定时间显著减少,大幅提高了系统的稳定性。
本文通过在双馈风电机组与同步发电机组间构建立方刚度耦合关系,提出了双馈风电机组的非线性弹性耦合控制策略,实现了将系统暂态能量高效转移至新能源侧,进一步优化了风电机组的并网支撑效果。结合理论分析和测试验证,得到以下结论:
1)虚拟同步控制下双馈风电机组忽略了与同步发电机组间的轴系耦合关系,虽然具有模拟同步机惯量响应和阻尼特性的能力,但机组间无功率转移,导致同步机振荡过程中暂态能量无法高效转移至新能源侧。
2)引入非线性刚度,在虚拟同步机与同步机之间建立功率耦合关系,可以高效率地将暂态能量单向转移至新能源侧。利用哈密顿能量函数,结合双馈风电机组暂态能量转移机理可知,当满足惯量比以及非线性刚度优化条件后,系统暂态能量将完全转移至风电机组。
3)在虚拟同步控制系统中增设非线性弹性耦合控制环节,不仅为风电机组的虚拟惯量提供了参数设计依据,并且与非线性弹性耦合协调配合可显著提升暂态能量转移效率。测试结果表明,非线性弹性耦合控制可进一步完善风电机组的频率支撑和功率振荡抑制能力。
非线性弹性耦合控制结构简单,在虚拟同步机有功控制系统中增设了非线性弹性耦合环节,该控制方案同样适用于直驱全功率风电机组,在其网侧变流器控制系统中附加非线性弹性耦合控制环节即可实现控制目标。
在非线性弹性耦合下,若风电场内风电机组电气距离较远可分别计算初始刚度,并采集并网点处电压相角信号,下发至每台需要参与振荡抑制的风电机组,计算其最优刚度,以实现预期控制效果。目前,风电场通信延时通常不超过40 ms,对于机电暂态时间尺度的功率振荡抑制影响相对较小。
附 录
1. 系统暂态能量转移过程公式推导
当处于虚拟同步控制下时,利用复变量-平均法可得系统的慢变方程为
 (A1)
(A1)
复变量j10和j20在复平面展开可得
 (A2)
(A2)
将式(A2)代入式(A1)中,令实部和虚部为0可得
 (A3)
(A3)
同步发电机的暂态能量可表示为
 (A4)
(A4)
取系统参数kn1=0.05,kn2=0.2,e=0.5,联合式(A3)和式(A4)可得虚拟同步控制下系统能量转移过程。
当处于非线性弹性耦合控制时,对式(7)引入以下变量代换:e=J2/J1,w0=(k1/J1)1/2,l1=D1/(eJ1),l2=D2/(eJ1),kn1= k2/J1,kn2= k3/J1,d=1/e。
通过复变量-平均法可得式(7)的慢变方程为
 (A5)
(A5)
式中, 。
。
用 的共轭和
的共轭和 的共轭分别乘以式(A5)中第一式和第二式,再用和分别乘以式(A5)共轭的第一式和第二式,再分别相加可得
的共轭分别乘以式(A5)中第一式和第二式,再用和分别乘以式(A5)共轭的第一式和第二式,再分别相加可得
 (A6)
(A6)
当l1=l2=0时,式(A6)即为系统的第一个首次积分。
 (A7)
(A7)
对式(A7)进行Laplace变换,可得
 (A8)
(A8)
式(A8)可化简为
 (A9)
(A9)
对式(A9)再进行Laplace反变换得
 (A10)
(A10)
对积分项在t1=0处进行泰勒展开,取前两项可得
 (A11)
(A11)
由式(A11)可得
 (A12)
(A12)
联合式(A10)、式(A11),同步机暂态能量可表达为
 (A13)
(A13)
取系统参数kn1=0.05,kn2=0.2,l2=2,e=0.5,通过式(A12)、式(A13)可得非线性弹性耦合控制时系统暂态能量的转移过程如图3所示。
2.仿真系统参数
附表1 双馈风电机组的参数
App.Tab.1 Parameters of doubly-fed wind turbine

参数数值参数数值 额定电压/kV0.69定子电阻(pu)0.01 额定功率/(kV·A)2 222定子电抗(pu)磁电抗(pu)0.13.5 额定频率/Hz50 转动惯量/(kg·m2)75
附表2 G2的参数
App.Tab.2 Parameters of G2

参数数值参数数值 额定电压/kV18定子电阻(pu)0.005 额定功率/MW200定子电抗(pu)直轴同步电抗xd(pu)0.11.72 额定频率/Hz50 惯量常数/s3交轴同步电抗xq(pu)1.66
附表3 虚拟同步控制参数
App.Tab.3 Virtual synchronous control parameters

参数 数值20.8030.819
附表4 非线性弹性耦合控制参数
App.Tab.4 Nonlinear elastic coupling control parameters

参数 数值1.20.80.0430.819
附表5 变压器参数
APP.Tab.5 Parameters of transformers

参数数值参数数值 XT1(pu)0.024XT4(pu)XT5(pu)0.0120.005 XT2(pu)0.23 XT3(pu)0.02
附表6 G1的参数
APP.Tab.6 Parameters of G1

参数数值参数数值 标称电压/kV16.5定子电阻(pu)0 额定功率/MW300定子电抗(pu)xd(pu)0.0830.36 额定频率/Hz50 惯量常数/s4xq(pu)0.24
附表7 G3的参数
APP.Tab.7 Parameters of G3

参数数值参数数值 标称电压/kV13.8定子电阻(pu)0 额定功率/MW120定子电抗(pu)xd(pu)0.0951.68 额定频率/Hz50 惯量常数/s4.7xq(pu)1.61
附表8 线路参数
APP.Tab.8 Parameters of lines

参数数值参数数值 R4-7+jX4-7(pu)0.007 8+j0.039 2R5-6+jX5-6(pu)0.008 0+j0.040 2 R7-9+jX7-9(pu)0.004 1+j0.020 6R4-10+jX4-10(pu)额定电压/kV0.007 8+j0.039 2230 R6-8+jX6-8(pu)0.011 0+j0.054 9 R8-9+jX8-9(pu)0.005 9+j0.029 4基准功率/(MV·A)100 R4-5+jX4-5(pu)0.005 9+j0.029 4
附图1 DFIG的最大功率追踪控制框图
App.Fig.1 The maximum power tracking control block diagram of DFIG
3. 虚拟同步模式下暂态能量转移
虚拟同步控制下,双馈风电机组对于暂态能量的转移存在改善空间,以下给出具体分析:在虚拟同步控制下,kn1=0, ,可得系统的哈密顿能量函数为
,可得系统的哈密顿能量函数为
 (A14)
(A14)
根据能量守恒以及系统的哈密顿能量函数可求得
 (A15)
(A15)
依据式(A15)可求得虚拟同步控制下系统暂态能量转移过程,如附图2所示。由附图2可知,风电机组与同步机间最多可转移一半的暂态能量,即机组间的能量转移效率最大为50%。因此,虚拟同步控制限制了风电机组转移暂态能量的效率,风电机组并网主动支撑性能仍存在改善空间。
附图2 虚拟同步控制下系统能量转移过程
App.Fig.2 System energy transfer process under virtual synchronous control
4. 暂态能量计算
2.1节中式(19)同步机暂态能量可表示为
 (A16)
(A16)
式中, 为同步机
为同步机 的角速度;
的角速度; 为系统同步角速度;
为系统同步角速度; 为同步机的功角;
为同步机的功角; 为同步机功角的初始值。
为同步机功角的初始值。
结合仿真算例利用式(A16)进行暂态能量的计算,其中参数均采用标幺值,测试结果如附图3所示。由附图3可知,G2的暂态能量在2~4 s内逐渐衰减至0,由于实际中风电机组的暂态能量转移效率无法达到100%,暂态能量在短时间内存在少量回流现象,但在所提控制下,如3.4节中图16所示,G2功率的最大波动幅度由101 MW减少至59 MW,双馈风电机组功率的最大波动幅度由0增至65 MW,可以进一步验证风电机组单向转移暂态能量的结论。
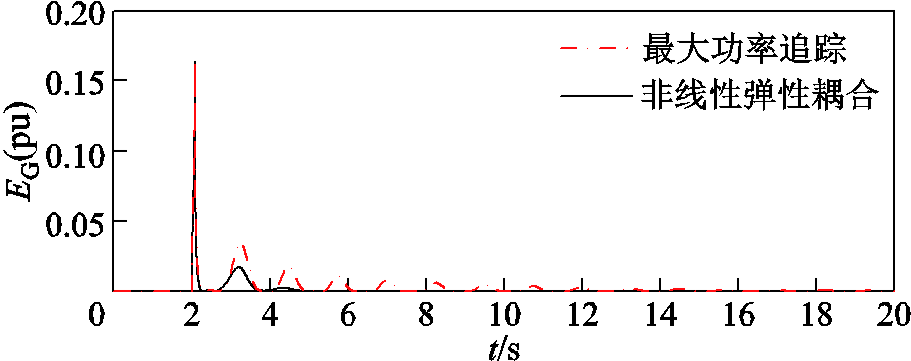
附图3  的暂态能量
的暂态能量
App.Fig.3 Transient energy of
参考文献
[1] 余希瑞, 周林, 郭珂, 等. 含新能源发电接入的电力系统低频振荡阻尼控制研究综述[J]. 中国电机工程学报, 2017, 37(21): 6278-6290.
Yu Xirui, Zhou Lin, Guo Ke, et al. A survey on low frequency oscillation damping control in power system integrated with new energy power generation[J]. Proceedings of the CSEE, 2017, 37(21): 6278-6290.
[2] 程珊珊, 王海鑫, 杨子豪, 等. 虚拟同步发电机对系统低频振荡的影响及抑制方法综述[J]. 太阳能学报, 2023, 44(8): 119-129.
Cheng Shanshan, Wang Haixin, Yang Zihao, et al. Overview of effect of virtual synchronous generators on low-frequency oscillation of power system and suppression methods[J]. Acta Energiae Solaris Sinica, 2023, 44(8): 119-129.
[3] 王一珺, 杜文娟, 王海风. 大规模风电汇集系统小干扰稳定性研究综述[J]. 电网技术, 2022, 46(5): 1934-1946.
Wang Yijun, Du Wenjuan, Wang Haifeng. Review on small signal stability analysis of large-scale wind power collection system[J]. Power System Technology, 2022, 46(5): 1934-1946.
[4] 徐筱倩, 黄林彬, 汪震, 等. 双馈风电机组虚拟惯量控制对电力系统机电振荡的影响分析[J]. 电力系统自动化, 2019, 43(12): 11-17, 43.
Xu Xiaoqian, Huang Linbin, Wang Zhen, et al. Analysis on impact of virtual inertia control of DFIG-based wind turbine on electromechanical oscillation of power system[J]. Automation of Electric Power Systems, 2019, 43(12): 11-17, 43.
[5] 张祥宇, 胡剑峰, 付媛, 等. 风储联合系统的虚拟惯量需求与协同支撑[J]. 电工技术学报, 2024, 39(3): 672-685.
Zhang Xiangyu, Hu Jianfeng, Fu Yuan, et al. Virtual inertia demand and collaborative support of wind power and energy storage system[J]. Transactions of China Electrotechnical Society, 2024, 39(3): 672-685.
[6] 吕志鹏, 盛万兴, 刘海涛, 等. 虚拟同步机技术在电力系统中的应用与挑战[J]. 中国电机工程学报, 2017, 37(2): 349-360.
Lü Zhipeng, Sheng Wanxing, Liu Haitao, et al. Application and challenge of virtual synchronous machine technology in power system[J]. Proceedings of the CSEE, 2017, 37(2): 349-360.
[7] 曹炜, 钦焕乘, 陆建忠, 等. 新型电力系统下虚拟同步机的定位和应用前景展望[J]. 电力系统自动化, 2023, 47(4): 190-207.
Cao Wei, Qin Huancheng, Lu Jianzhong, et al. Orientation and application prospect of virtual synchronous generator in new power system[J]. Automation of Electric Power Systems, 2023, 47(4): 190-207.
[8] 李少林, 王伟胜, 张兴, 等. 风力发电对系统频率影响及虚拟惯量综合控制[J]. 电力系统自动化, 2019, 43(15): 64-70.
Li Shaolin, Wang Weisheng, Zhang Xing, et al. Impact of wind power on power system frequency and combined virtual inertia control[J]. Automation of Electric Power Systems, 2019, 43(15): 64-70.
[9] 张波, 颜湘武, 黄毅斌, 等. 虚拟同步机多机并联稳定控制及其惯量匹配方法[J]. 电工技术学报, 2017, 32(10): 42-52.
Zhang Bo, Yan Xiangwu, Huang Yibin, et al. Stability control and inertia matching method of multi-parallel virtual synchronous generators[J]. Transactions of China Electrotechnical Society, 2017, 32(10): 42-52.
[10] 秦本双, 徐永海, 贾焦心. 基于机械导纳法的SGs/VSGs转矩–频率动力学建模与分析[J]. 中国电机工程学报, 2020, 40(21): 6903-6913.
Qin Benshuang, Xu Yonghai, Jia Jiaoxin. Modeling and analysis of SGs/VSGs torque-frequency dynamics based on mechanical admittance method[J]. Proceedings of the CSEE, 2020, 40(21): 6903-6913.
[11] 王亚维, 刘邦银, 段善旭, 等. 虚拟同步控制的暂态特性优化策略研究[J]. 中国电机工程学报, 2019, 39(20): 5885-5893, 6169.
Wang Yawei, Liu Bangyin, Duan Shanxu, et al. Research on transient characteristic optimization of virtual synchronization generator control strategy[J]. Proceedings of the CSEE, 2019, 39(20): 5885-5893, 6169.
[12] Wang Weiyu, Jiang Lin, Cao Yijia, et al. A parameter alternating VSG controller of VSC-MTDC systems for low frequency oscillation damping[J]. IEEE Transac-tions on Power Systems, 2020, 35(6): 4609-4621.
[13] 李武华, 王金华, 杨贺雅, 等. 虚拟同步发电机的功率动态耦合机理及同步频率谐振抑制策略[J]. 中国电机工程学报, 2017, 37(2): 381-391.
Li Wuhua, Wang Jinhua, Yang Heya, et al. Power dynamic coupling mechanism and resonance suppression of synchronous frequency for virtual synchronous generators[J]. Proceedings of the CSEE, 2017, 37(2): 381-391.
[14] 花赟玥, 杨超然, 何国庆, 等. 考虑小干扰稳定和频率稳定的虚拟惯量配置分析[J]. 清华大学学报(自然科学版), 2021, 61(5): 437-445.
Hua Yunyue, Yang Chaoran, He Guoqing, et al. Virtual inertia configuration analysis considering small-signal stability and frequency stability[J]. Journal of Tsinghua University (Science and Technology), 2021, 61(5): 437-445.
[15] 宋琼, 张辉, 孙凯, 等. 多微源独立微网中虚拟同步发电机的改进型转动惯量自适应控制[J]. 中国电机工程学报, 2017, 37(2): 412-424.
Song Qiong, Zhang Hui, Sun Kai, et al. Improved adaptive control of inertia for virtual synchronous generators in islanding micro-grid with multiple distributed generation units[J]. Proceedings of the CSEE, 2017, 37(2): 412-424.
[16] 于彦雪, 关万琳, 陈晓光, 等. 基于序阻抗的虚拟同步机同步频率谐振现象[J]. 电工技术学报, 2022, 37(10): 2584-2595.
Yu Yanxue, Guan Wanlin, Chen Xiaoguang, et al. Synchronous frequency resonance in virtual synchronousgenerator based on sequence-impedance[J]. Transactions of China Electrotechnical Society, 2022, 37(10): 2584-2595.
[17] 孙大卫, 刘辉, 吴林林, 等. 虚拟同步发电机对低频振荡的影响建模与特性分析[J]. 电力系统自动化, 2020, 44(24): 134-144.
Sun Dawei, Liu Hui, Wu Linlin, et al. Modeling and characteristic analysis on influence of virtual synchronous generator on low-frequency oscillation[J]. Automation of Electric Power Systems, 2020, 44(24): 134-144.
[18] 曾德银, 姚骏, 张田, 等. 虚拟同步发电机多机并联系统的频率小信号稳定性分析研究[J]. 中国电机工程学报, 2020, 40(7): 2048-2061, 2385.
Zeng Deyin, Yao Jun, Zhang Tian, et al. Research on frequency small-signal stability analysis of multi-parallel virtual synchronous generator-based system[J]. Proceedings of the CSEE, 2020, 40(7): 2048-2061, 2385.
[19] 王亚军, 杨立波, 马斌, 等. 虚拟同步机惯量及阻尼系数协调优化方法[J]. 电力系统保护与控制, 2022, 50(19): 88-98.
Wang Yajun, Yang Libo, Ma Bin, et al. Coordination and optimization strategy of virtual inertia and damping coefficient of a virtual synchronous generator[J]. Power System Protection and Control, 2022, 50(19): 88-98.
[20] Zhang Xiangyu, Zhu Zhengzhen, Fu Yuan, et al. Optimized virtual inertia of wind turbine for rotor angle stability in interconnected power systems[J]. Electric Power Systems Research, 2020, 180: 106157.
[21] 王淋, 巨云涛, 吴文传, 等. 面向频率稳定提升的虚拟同步化微电网惯量阻尼参数优化设计[J]. 中国电机工程学报, 2021, 41(13): 4479-4490.
Wang Lin, Ju Yuntao, Wu Wenchuan, et al. Optimal design of inertia and damping parameters of virtual synchronous microgrid for improving frequency stability[J]. Proceedings of the CSEE, 2021, 41(13): 4479-4490.
[22] Yao Fengjun, Zhao Jinbin, Li Xiangjun, et al. RBF neural network based virtual synchronous generator control with improved frequency stability[J]. IEEE Transactions on Industrial Informatics, 2021, 17(6): 4014-4024.
[23] 杨涛, 廖勇. 含双馈风电场的互联电力系统虚拟惯量与虚拟阻尼协调控制方法[J]. 电力自动化设备, 2020, 40(11): 92-100.
Yang Tao, Liao Yong. Coordinated control method of virtual inertia and virtual damping for interconnected power system with doubly-fed wind farm[J]. Electric Power Automation Equipment, 2020, 40(11): 92-100.
[24] 刘华志, 张祥宇, 李永刚, 等. 基于虚拟联轴的双馈风力发电机组功率振荡抑制技术[J]. 中国电机工程学报, 2022, 42(16): 5910-5921, 6166.
Liu Huazhi, Zhang Xiangyu, Li Yonggang, et al. Power oscillation suppression technology of DFIG-based wind generator based on virtual shaft coupling[J]. Proceedings of the CSEE, 2022, 42(16): 5910-5921, 6166.
[25] 刘华志, 张祥宇, 李永刚, 等. 双馈风电机组的虚拟联轴控制与暂态能量传递[J]. 中国电机工程学报, 2022, 42(19): 7007-7019.
Liu Huazhi, Zhang Xiangyu, Li Yonggang, et al. Transient energy transfer and virtual shaft coupling control of DFIG-based wind generation[J]. Pro-ceedings of the CSEE, 2022, 42(19): 7007-7019.
[26] 陈依林, 杜敬涛, 崔海健, 等. 不同类型水平弹簧组合刚度非线性吸振器的性能分析及稳定性研究[J]. 力学学报, 2023, 55(1): 192-202.
Chen Yilin, Du Jingtao, Cui Haijian, et al. Performance analysis and stability study of different types of nonlinear vibration absorbers with combined stiffness of horizontal springs[J]. Chinese Journal of Theoretical and Applied Mechanics, 2023, 55(1): 192-202.
[27] 柴凯, 李爽, 楼京俊, 等. 非线性能量阱系统的强调制响应研究[J]. 湖南大学学报(自然科学版), 2022, 49(8): 82-92.
Chai Kai, Li Shuang, Lou Jingjun, et al. Investigation on strongly modulated response of nonlinear energy sink system[J]. Journal of Hunan University (Natural Sciences), 2022, 49(8): 82-92.
[28] Nguyen T A, Pernot S. Design criteria for optimally tuned nonlinear energy sinks—part 1: transient regime[J]. Nonlinear Dynamics, 2012, 69(1): 1-19.
[29] 刘欣, 郭志博, 贾焦心, 等. 基于序阻抗的虚拟同步发电机并网稳定性分析及虚拟阻抗设计[J]. 电工技术学报, 2023, 38(15): 4130-4146.
Liu Xin, Guo Zhibo, Jia Jiaoxin, et al. Stability analysis and virtual impedance design of virtual synchronous machine based on sequence impedance[J]. Transactions of China Electrotechnical Society, 2023, 38(15): 4130-4146.
[30] 韩应生, 孙海顺, 秦世耀, 等. 电压源型双馈风电并网系统小扰动低频稳定性分析[J]. 电工技术学报, 2023, 38(5): 1312-1324, 1374.
Han Yingsheng, Sun Haishun, Qin Shiyao, et al. Low-frequency stability analysis of voltage-sourced doubly-fed wind power grid-connected system under small disturbance[J]. Transactions of China Electrotechnical Society, 2023, 38(5): 1312-1324, 1374.
[31] 颜湘武, 张伟超, 崔森, 等. 基于虚拟同步机的电压源逆变器频率响应时域特性和自适应参数设计[J]. 电工技术学报, 2021, 36(增刊1): 241-254.
Yan Xiangwu, Zhang Weichao, Cui Sen, et al. Time domain characteristics and adaptive parameter design of frequency response of voltage source inverter based on virtual synchronous machine[J]. Transactions of China Electrotechnical Society, 2021, 36(S1): 241-254.
[32] 程雪坤, 孙旭东, 柴建云, 等. 电网对称故障下双馈风力发电机的虚拟同步控制策略[J]. 电力系统自动化, 2017, 41(20): 47-54, 125.
Cheng Xuekun, Sun Xudong, Chai Jianyun, et al. Virtual synchronous control strategy for doubly-fed induction generator wind turbines under symmetrical grid faults[J]. Automation of Electric Power Systems, 2017, 41(20): 47-54, 125.
[33] 尚磊, 胡家兵, 袁小明, 等. 电网对称故障下虚拟同步发电机建模与改进控制[J]. 中国电机工程学报, 2017, 37(2): 403-412.
Shang Lei, Hu Jiabing, Yuan Xiaoming, et al. Modeling and improved control of virtual synchronous generators under symmetrical faults of grid[J]. Proceedings of the CSEE, 2017, 37(2): 403-412.
Abstract After large-scale integration of renewable energy such as wind power and photovoltaics into the power grid, the dynamic stability of the system is affected, resulting in different types of power oscillations. The doubly-fed wind turbine is electrically decoupled from the grid frequency due to the grid-connected inverter connected to the grid. When the system frequency changes, it cannot provide effective power support. The virtual synchronous generator can provide frequency and power support for the system by simulating the operation characteristics of the synchronous generator. In order to further improve the grid-connected support performance of doubly-fed wind turbine, this paper introduces a cubic stiffness coupling link into the active power control system of the virtual synchronous generator. By establishing a two-degree-of-freedom system dynamic model with wind power under nonlinear elastic coupling, a nonlinear elastic coupling control strategy for doubly-fed wind turbine is proposed.
Firstly, the virtual shafting coupling relationship between synchronous generator and doubly-fed wind turbine in virtual synchronous operation is analyzed. Secondly, a two-degree-of-freedom system dynamic model with wind power under nonlinear elastic coupling is established by introducing cubic stiffness through nonlinear power coupling. Thirdly, based on the Hamiltonian principle, the transient energy transfer process of the wind power grid-connected system after introducing the cubic stiffness is analyzed, and the inertia setting condition between the units are derived. Finally, a nonlinear elastic coupling control strategy based on doubly-fed wind turbine is proposed. And the parameters of controller are optimized according to the inertia setting condition. The doubly-fed wind turbine is used to efficiently transfer transient energy and effectively suppress power oscillation.
Simulation analysis of the proposed nonlinear elastic coupling control shows that under the nonlinear elastic coupling, when the power oscillation occurs in the system, the power support potential of the doubly-fed wind turbine is further released, and the transient energy of the synchronous generator is efficiently transferred to wind turbine, which effectively suppresses the system power oscillation. When the system frequency changes, the doubly-fed wind turbine reduces the drop amplitude of the system frequency by providing effective power support, and reduces the power fluctuation amplitude of the synchronous generator, which significantly improves the stability of the system.
The following conclusions can be drawn from the simulation analysis: (1) The doubly-fed wind turbine can provide inertia and damping support for the system under virtual synchronous control, but the synchronous operation mode limits the power support potential of the wind turbine, and the virtual inertia delays the recovery of the system frequency. (2) After satisfying the inertia ratio and cubic stiffness optimization conditions, the doubly-fed wind turbine under nonlinear elastic coupling can efficiently transfer the transient energy of the synchronous generator, effectively suppress the power oscillation, and significantly reduce the risk of system resonance. (3) Under the proposed nonlinear elastic coupling control strategy, the grid-connected support performance of the doubly-fed wind turbine is significantly improved by efficiently transferring the system transient energy to the new energy side. By comparing the stability support effects of maximum power point tracking control, virtual synchronous control and nonlinear elastic coupling control through simulation, it is verified that the doubly-fed wind turbine can more effectively release its power oscillation suppression and frequency support potential under the proposed control.
keywords:Wind power generation, elastic coupling, power oscillation, virtual synchronous, transient energy
DOI: 10.19595/j.cnki.1000-6753.tces.232071
中图分类号:TM614
国家自然科学基金(52277100)、河北省自然科学基金(E2023502038)和中央高校基本科研业务费专项资金(2023MS101)资助项目。
收稿日期 2023-12-13
改稿日期 2024-03-08
张祥宇 男,1984年生,副教授,博士,研究方向为新能源发电与智能电网。E-mail:zh.xy.sq@163.com(通信作者)
黄泳漩 男,2000年生,硕士研究生,研究方向为新能源并网稳定性分析及控制。E-mail:2061646345@qq.com
(编辑 赫 蕾)