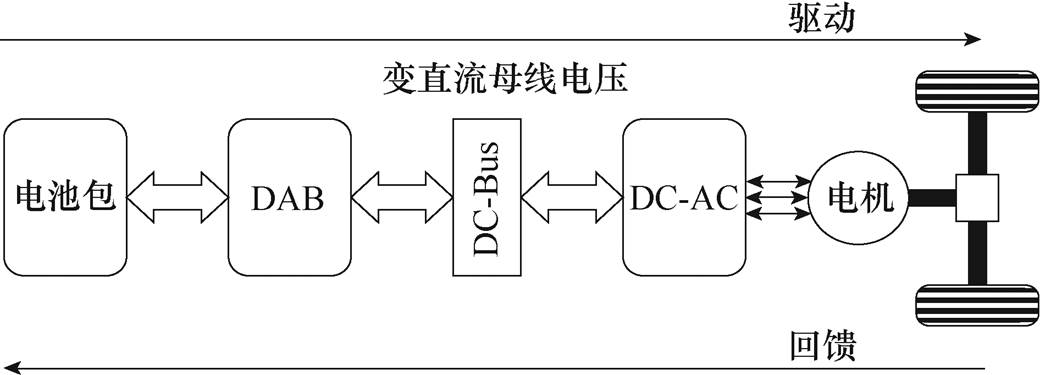
图1 直流侧前置DAB的电机驱动系统拓扑
Fig.1 Topology of motor drive system with DAB before DC bus
摘要 将双有源桥DC-DC变换器置于电动汽车动力电池与电机逆变器之间,可以根据电机实时转速动态调节系统直流母线电压,提升电机驱动系统的能量变换效率。然而,直流母线电压的大范围变化会带来双有源桥DC-DC变换器电流应力剧增的挑战。为此,该文分析直流母线电压动态变化条件下双有源桥DC-DC变换器的电流应力变化规律及优化方法,在此基础上提出一种模型预测与应力优化混合控制策略,将电流应力优化控制嵌入到模型预测控制中,在降低电流应力的同时还能提高系统的稳态和动态性能。另外,为了抑制模型参数失配对模型预测控制的不利影响,提出一种基于输出反馈的误差校正方法,以提高模型预测控制的参数鲁棒性。原型样机实验结果验证了所提控制策略的正确性和有效性,为直流侧前置双有源桥DC-DC变换器的电机控制器设计与控制提供了理论依据。
关键词:双有源桥 DC-DC变换器 模型预测控制 电流应力优化
随着人类经济社会的发展与进步,能源短缺和环境污染问题受到越来越多的关注。在交通领域,电力驱动系统因具有零排放、低噪声、高效率等优点,已经逐渐取代内燃机动力系统,成为新的发展趋势。目前,已经有多种技术路线的电动汽车获得了快速发展,如纯电动汽车、燃料电池电动汽车、混合动力汽车等[1-4]。
对于纯电动汽车的设计,其动力电池和直流母线的标称电压一般按照最高转速工况的需要而设计,其电压值较高(300~400 V)。然而,在实际通勤行驶中,电动汽车大部分时间均会处于中、低速工况,导致电机及其驱动器由于较高的母线电压而产生不必要的高损耗,降低系统能量利用效率[5-7]。对于燃料电池型电动汽车,它存在的一个主要缺点是燃料电池的输出电压和输出电流的抗干扰性较差,容易受到干扰并产生较大波动,影响后端的电机驱动系统正常工作。
为了解决上述问题,可在电动汽车动力电池与电机驱动器之间增加一级双向DC-DC变换器(Bi- directional DC-DC Converter, BDC),不仅能够提高系统的抗干扰性能,还能根据电机实时转速来动态调节直流母线电压幅值以提高电机系统能量转换效率[8-10]。文献[5]提出一种可变直流母线电压的电动汽车电机驱动系统,其实验结果表明:所提出的可变直流母线电压电机驱动系统和400 V固定电压电机驱动系统相比,在中、低速循环工况下,能够降低损耗9.33%、节约能量2.05%。
常用的BDC变换器有Buck-Boost、Cuk、Sepic- Zeta、正激、反激、半桥、全桥等多种拓扑类型。其中,双有源全桥(Dual Active Bridge, DAB)变换器具有拓扑结构对称、双向功率传输、电气隔离、宽软开关范围、高功率密度和易于控制等优点,被普遍认为是双向高频功率转换中最有前途的功率变换器,已广泛应用于各种能量变换场合。将DAB应用于电动汽车驱动控制是一个颇具发展前景的选择[11-13]。
将DAB变换器置于电动汽车动力电池与电机逆变器之间,可以根据电机实时转速动态调节系统直流母线电压,提升电机驱动系统的能量变换效率。然而,同时也将面临两大挑战:①电机驱动系统直流母线电压的大范围变化会引起DAB变换器输入输出电压不匹配,导致其电流应力剧增、软开关丢失、损耗增加等问题并降低系统效率;②电动汽车行驶时反复的加减速及制动操作,巨大能量的释放与回收过程不仅要求DAB变换器能承受高电压、大电流冲击,还要求DAB具有较快的动态响应速度。因此,降低电流应力和提高动态响应性能是DAB应用于电动汽车电机驱动系统时需要解决的两大关键问题。
对于电流应力问题,DAB电流应力的大小与其移相调制策略有关,其电流应力的最小点可以近似认为是效率的最高点,因此可以通过对电流应力的优化实现对效率的优化[14]。
DAB常用的移相调制策略有单移相(Single Phase Shift, SPS)、扩展移相(Extended Phase Shift, EPS)、双重移相(Double Phase Shift, DPS)和三重移相(Triple Phase Shift, TPS)等。SPS调制通过改变左右H桥输出电压间的相位差来调节传输功率大小和方向,实现简单,但是由于只有一个控制自由度,当DAB输入输出电压不匹配时,其电流应力将显著增大并丢失软开关特性,导致系统效率降低。EPS调制在单侧桥内添加额外的内移相角,拥有2个控制自由度,可以拓宽DAB的软开关范围、减小电流应力和回流功率,但是其正反两方向功率传输特性不同,电流应力优化算法也不一致,在功率传输方向切换时需要同步改变驱动信号,应用不 便[15-17]。DPS调制在双侧H桥同时增加内移相角,同样拥有2个控制自由度,在能量双向传输场合无需切换控制信号,且功率调节范围更宽,更适合于功率传输方向频繁切换的电机驱动控制应用[18-20]。TPS调制则在DPS调制的基础上可以控制两个内移相角的大小不相等,拥有3个控制自由度,能够获得更优的电流应力优化效果,但是其计算与优化过程过于复杂[21-24]。本文选择DPS作为DAB的移相调制策略。
DPS调制策略下,传输相同的功率存在无穷多种移相组合方式,不同组合方式的电流应力并不相同,寻找最小电流应力的过程即为电流应力优化。
传统电流应力优化一般采用分步法,将各个模态下的电流应力和功率方程联立并求导计算,最终获得最佳移相比。这种方法虽然能够求解出最佳移相比并降低电流应力,但是求解过程复杂且计算量较大,不利于工程应用[14]。固定输出功率下寻找最小电流应力的过程属于等式约束下的最优化求解问题,因此,可借助拉格朗日乘数法(Lagrange Multiplier Method, LMM)进行求解[25]。区别于传统电流应力优化方法,这类方法具有计算量小、计算过程简洁的优点。
对于动态响应性能问题,DAB变换器的动态响应性能取决于其具体控制策略。常用的控制策略有传统的PI控制[11]、负载电流前馈(Load Current Forward Feed, LCFF)控制[26]、滑模控制、模型预测控制(Model Predictive Control, MPC)[27-29]等。传统PI控制具有实现简单、适应性强等优点,但是其参数整定困难、快速性和准确性有所欠缺;负载电流前馈控制能够一定程度上提高DAB的动态响应性能;模型预测控制的动态控制性能更好、鲁棒性强,是传统控制策略的有效替代方案。
虽然模型预测控制已经广泛应用于电机控制器、并网逆变器等变流器的控制中,但由于DAB采用的移相调制方法与常规变流器采用的脉冲宽度调制(Pulse Width Module, PWM)方法有所不同,模型预测控制应用于DAB的相关研究尚不多见。
国内外已有的DAB模型预测控制大多基于SPS调制策略,没有应力优化特性。文献[27]提出了一种基于分组寻优的模型预测控制方法,能有效降低占空比穷举遍历的计算量,然而该方法仅针对单移相调制进行分析,只有一个控制自由度。文献[28]针对输出并联型DAB变换器动态响应慢及传输功率不均衡问题,提出一种模型预测控制策略及其功率均衡方法,该方法同样仅针对单移相调制策略,无法对电流应力进行优化。文献[29]提出一种基于扩展移相(EPS)的输出电压模型预测控制与梯度下降算法的混合控制策略,实现了回流功率优化,然而其控制方法不能直接用于DPS调制策略中,不适合于功率传输方向频繁切换的电机驱动控制应用场景。总之,上述关于DAB的模型预测控制相关研究要么不能处理DAB电流应力优化问题,要么不适合于电动汽车功率变换场景,亟待进一步深入研究。
为了解决DAB应用于电动汽车电机驱动系统所面临的电流应力优化和动态响应性能两大关键问题,本文将电流应力优化控制算法嵌入到模型预测控制策略中,提出一种模型预测与应力优化混合控制(Model Predictive Control and Current Stress Optimization, MPC-CSO)策略。同时,针对模型预测控制的参数失配问题,提出一种将预测误差实时反馈到预测模型中的在线误差校正方法。最后,在实验样机上对比了传统PI控制、负载电流前馈控制和所提出的模型预测与应力优化混合控制策略对DAB电流应力优化效果、稳态性能和动态性能控制效果。
图1为直流侧前置双有源桥DC-DC变换器的电动汽车电机驱动系统拓扑,其动力电池包和三相逆变器并不直接连接,而是通过DAB变换器相连。DAB根据汽车实时工况特性,调节内部移相控制角度,实现电能量的双向传输。例如,汽车正常行驶时,蓄电池输出电能并通过DAB变换器传输给三相逆变器及电机;而当汽车制动时,电机工作于发电机状态、输出电能,并通过三相逆变器和DAB回馈给蓄电池。本拓扑结构的最大优点是DAB可以根据电动汽车行驶工况动态调节其直流母线电压。
图1 直流侧前置DAB的电机驱动系统拓扑
Fig.1 Topology of motor drive system with DAB before DC bus
电动汽车驱动系统采用变直流母线电压方案,在中低速工况下,尽管DC-DC会产生一定的能量损耗,但由于功率转换器效率的大幅提高,电机驱动系统总体上仍具有更高的能量转换效率。文献[30]采用可变直流母线电压的控制策略,在低速工况下降低了电机驱动器的共模电压、谐波电流和开关频率。
总之,通过控制电机驱动系统的直流母线电压可以有效降低电流纹波、转矩脉动、共模电压、系统损耗,最终提高电机系统的整体能量利用效率和综合性能。
DAB由两个完全相同的全桥单元、高频变压器、辅助电感和直流支撑电容等构成,其拓扑结构如图2所示。图中,每个全桥单元由4个功率开关器件构成,分别用S1~S8表示,每个功率开关器件反并联一个续流二极管用于续流和实现软开关;T为高频变压器,其一、二次侧匝数比为n 1;L为变压器的漏电感和辅助电感之和;ui为输入侧电压,Ci为输入侧支撑电容;uo为输出侧电压,Co为输出侧支撑电容;vH1、vH2为变压器一、二次侧H桥的端口电压,iL为电感电流,io为负载电流。
1;L为变压器的漏电感和辅助电感之和;ui为输入侧电压,Ci为输入侧支撑电容;uo为输出侧电压,Co为输出侧支撑电容;vH1、vH2为变压器一、二次侧H桥的端口电压,iL为电感电流,io为负载电流。
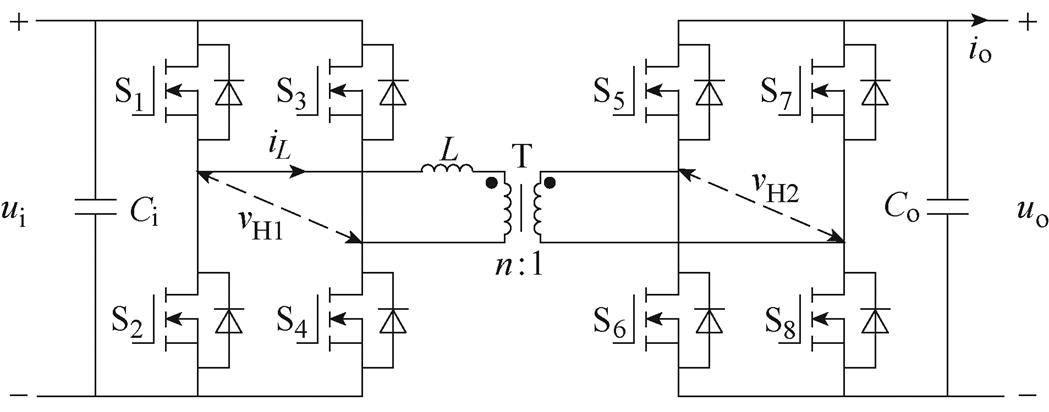
图2 DAB变换器拓扑结构
Fig.2 Topology of DAB converter
DAB的左右H桥均可等效为一个高频方波电压源,因此,DAB可以等效为两个高频电压源连接到一个电感两端。其基本工作原理类似于电力系统中的双机系统,可通过控制两个电压源间的相位差(移相角)来控制传输功率的大小和方向。
DAB变换器在DPS调制策略下的详细波形如图3所示。图中, 为桥内移相比,
为桥内移相比, 为桥间移相比,
为桥间移相比, 为半开关周期。
为半开关周期。 为一次侧H桥输出电压波形,
为一次侧H桥输出电压波形, 为二次侧H桥输出电压波形,均为三电平波形。根据DAB工作原理,电感电流
为二次侧H桥输出电压波形,均为三电平波形。根据DAB工作原理,电感电流 可表示为
可表示为
 (1)
(1)
根据移相比的大小关系,DPS移相调制具体可分为两种情况:①0≤<≤1;②0≤<≤1。现以第①种情况为例进行分析,第②种情况的分析类似。
DAB具有对称结构,当电压传输比
 时(k<1时情况类似),在一个周期内,电感电流具有对称性,有
时(k<1时情况类似),在一个周期内,电感电流具有对称性,有
 (2)
(2)
令 ,则有
,则有 ,
, ,
,
 ,
, ,
, ,
, ,
, 。根据电感两端电压、电流关系可以求得电感电流值为
。根据电感两端电压、电流关系可以求得电感电流值为
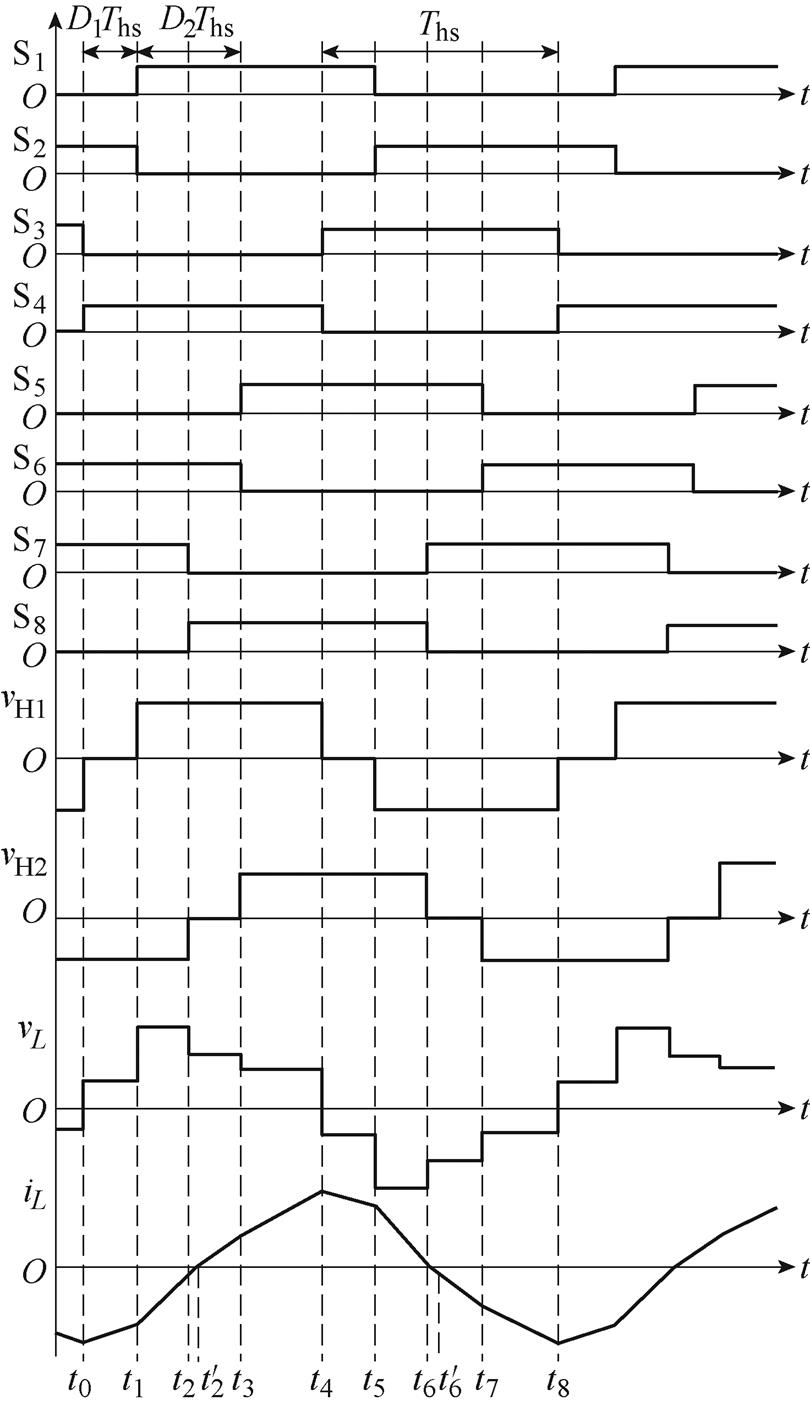
图3 DPS调制波形
Fig.3 Modulation waveforms of DPS
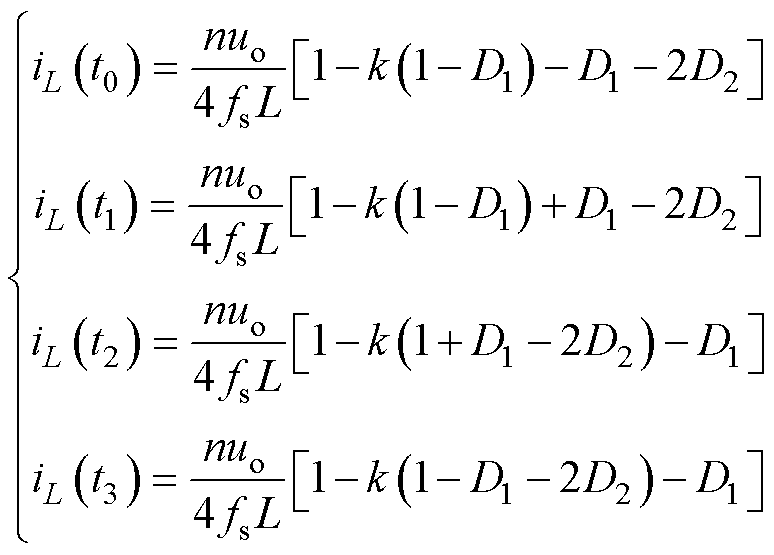 (3)
(3)
式中, 为开关频率,
为开关频率, 。
。
可得DAB的传输功率和电流应力分别为
 (4)
(4)
 (5)
(5)
 (6)
(6)
求出传输功率和电感电流的最大值分别为
 (7)
(7)
对输出功率和电流应力进行标幺化处理,得
 (8)
(8)
 (9)
(9)
当=0时,DPS退化为SPS,即SPS为DPS的一个特例。DPS的最大传输功率和最大电流应力与SPS相同,但SPS只有1个控制自由度,而DPS有2个控制自由度。因此,在相同传输功率下采用DPS调制存在无穷多种移相比组合,从而可以对电流应力进行优化,以获得更小的电流应力来提高 效率。
减小DAB的电流应力可以降低对功率开关器件的应力要求,降低系统导通损耗和开关损耗,提高系统效率。
DPS调制策略下,传输固定功率存在无穷多种移相比组合,必存在一组最佳移相比组合使得电感电流应力取得最小值,而寻找此最佳移相比组合的过程即为电流应力优化。传统电流应力优化方法一般采用分步法,将各个模态下的电流应力和功率方程联立求导计算,并最终获得最佳移相比。这种方法虽然能够求解出最佳移相比,但是求解过程复杂且计算量较大,不利于工程应用[18-20]。
根据最优化理论,DAB变换器在固定输出功率下求解最小电流应力移相比的过程属于等式约束下的最优化求解问题。可采用拉格朗日乘数法进行求解,相对于传统电流应力优化方法,具有计算量小、计算过程简洁的优点。具体步骤如下:
建立拉格朗日函数描述目标函数与约束函数的关系,目标函数为电流应力 ,约束函数为系统传输功率跟踪其参考值,即
,约束函数为系统传输功率跟踪其参考值,即 。建立的拉格朗日函数为
。建立的拉格朗日函数为
 (10)
(10)
式中, 为拉格朗日算子;
为拉格朗日算子; 为输出功率参考值。
为输出功率参考值。
将式(8)和式(9)代入式(10)后,对该拉格朗日函数求偏导,可以计算出最佳移相比使得电流应力最小。
 (11)
(11)
可得移相比与的关系为
 (12)
(12)
联立式(8)和式(12),可获得以传输功率 和电压传输比
和电压传输比 表示的最佳移相比的表达式为
表示的最佳移相比的表达式为
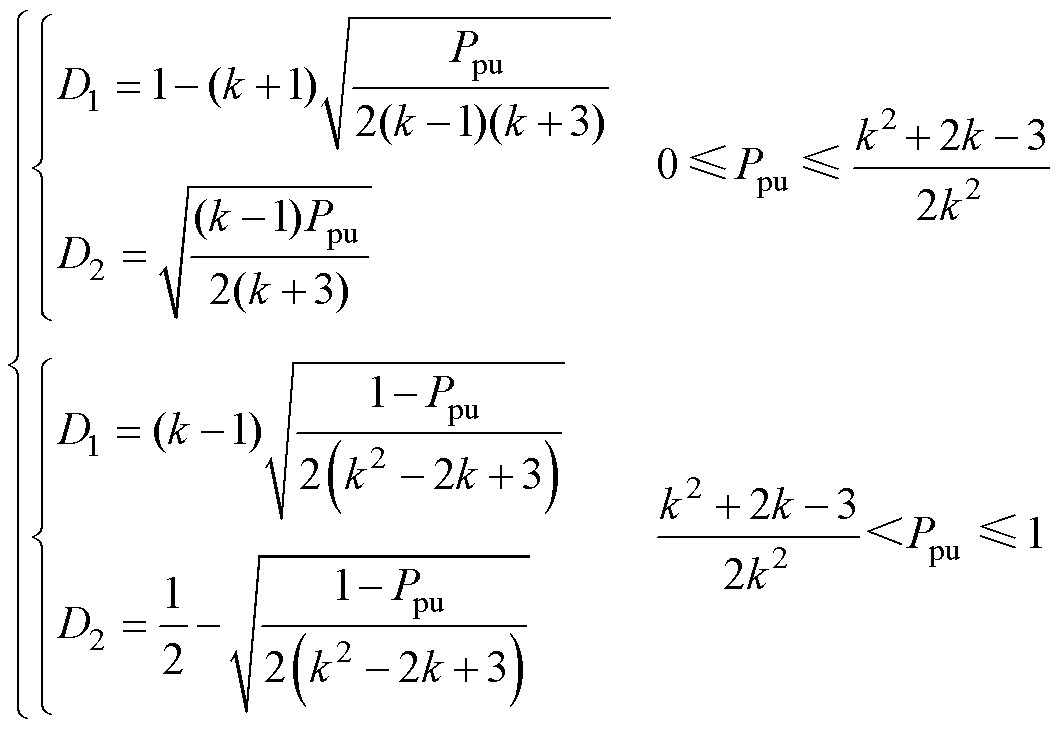 (13)
(13)
特殊地,当 时,传输功率为
时,传输功率为
 (14)
(14)
将式(14)代回式(9)可得最小电流应力为
 (15)
(15)
图4绘制了DAB在SPS调制和DPS调制下最小电流应力随传输功率和电压比变化的曲面。可见,DAB的最小电流应力与电压传输比呈正相关,与传输功率亦呈正相关。只有当电压比为1时,SPS和DPS的电流应力相等;当k>1时,DPS的电流应力均小于SPS。另外,当传输功率接近额定功率时,DPS和SPS的电流应力趋于相等。由此可知,相对于SPS,DPS在电流应力优化方面存在较大优势。
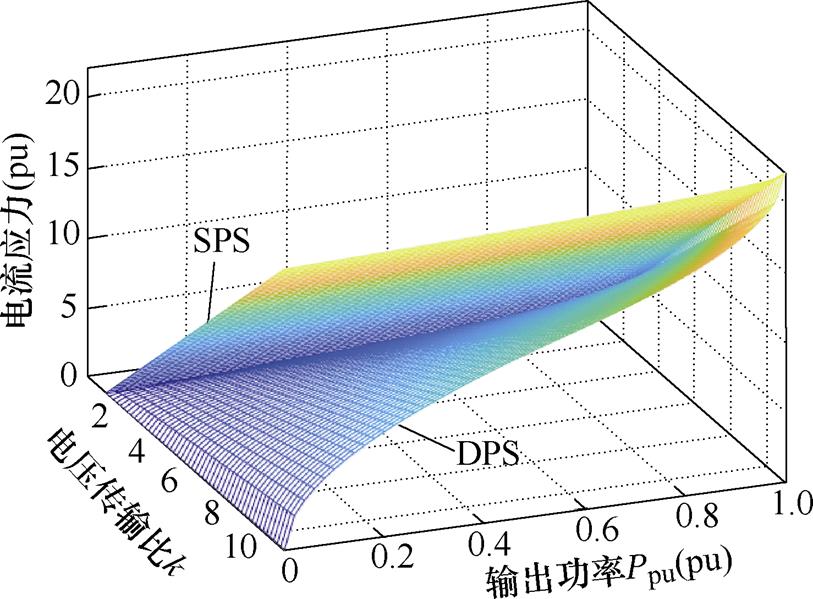
图4 SPS与DPS电流应力
Fig.4 Current stress of SPS and DPS
当电动汽车电机控制器采用变直流母线电压控制策略时,电机控制器前置DAB变换器大部分时间将处于电压传输比 状态,如果采用电流应力优化策略,则可以获得较小的电流应力,进而降低系统损耗并提高工作效率。
状态,如果采用电流应力优化策略,则可以获得较小的电流应力,进而降低系统损耗并提高工作效率。
模型预测控制(MPC)是在工业生产实践中产生的,它采用多步预测、滚动优化的控制方法,具有较好的控制性能和鲁棒性,近年来在电力电子领域获得了广泛的应用。采用模型预测控制可提高DAB的动态性能,具体地,通过定义成本函数来控制预测控制变量与其期望值之间的偏差,该偏差可以通过选择适当移相角组合来最小化,以实现快速的动态响应性能。
根据DAB拓扑电路,基于KCL定律,可建立DAB输出电容的状态空间平均模型,其与输出电压 、输出电流
、输出电流 、输出功率
、输出功率 和输出电容
和输出电容 相关。
相关。
 (16)
(16)
将式(5)代入式(16),可得
 (17)
(17)
式中, 为移相角组合函数,表示为
为移相角组合函数,表示为
 (18)
(18)
采用前向欧拉法对式(17)进行离散化处理,前向欧拉法公式为
 (19)
(19)
式中, 为当前时刻的输出电压值;
为当前时刻的输出电压值; 为下一时刻的输出电压值;T为控制周期。
为下一时刻的输出电压值;T为控制周期。
联立式(17)和式(19),可得离散化的状态空间模型为
 (20)
(20)
式中, 为移相角组合函数在当前时刻的控制量。
为移相角组合函数在当前时刻的控制量。
令 ,
, ,可得状态空间模型的简化表达式为
,可得状态空间模型的简化表达式为
 (21)
(21)
根据DAB的离散状态空间模型,模型预测控制根据DAB变换器在 时刻的输出电压,并假设未来N步时域内的移相控制量变化为,
时刻的输出电压,并假设未来N步时域内的移相控制量变化为,  ,…,
,…, ,之后维持不变,从而计算出预测时域P内的未来输出值为
,之后维持不变,从而计算出预测时域P内的未来输出值为
 (22)
(22)
式中, 为当前时刻预测出的未来第i步的输出电压值,
为当前时刻预测出的未来第i步的输出电压值, ;
; 为第j步的预测移相控制量,
为第j步的预测移相控制量, 。所有的预测输出电压值都可以用当前输出电压值和移相控制量线性表示。
。所有的预测输出电压值都可以用当前输出电压值和移相控制量线性表示。
对于DAB控制,预测时域P和控制时域N的取值大小对其控制性能及计算复杂度有影响。预测时域P可根据采样周期和建模时域长度选定,即采样周期和建模时域长度决定了预测时域P的上限。建模时域长度要求能基本涵盖系统的动态响应信息,本文中DAB的动态响应时间约为ms级,而系统采样周期为50 ms,因此建模时域长度约为20个点。由此可知,预测时域P的上限为20。而当P取值越大时,系统性能越接近稳态,系统动态响应能力将下降。预测时域P的下限需要大于控制时域N。类似地,N取值过大会降低系统动态响应能力,而N取值过小会导致系统振荡。
根据系统仿真结果,对于DAB控制,选取P=3~8,N=2~5时的控制效果已可基本满足系统稳态和动态性能要求。此外,考虑到本文使用STM32F405芯片作为运算处理器,计算能力有限,为了兼顾控制性能及计算复杂度,需要尽量选择较小的预测时域和控制时域,因此本文暂取P=3,N=2。
将式(22)写为矩阵形式,得到DAB预测模型的矩阵表达式为
 (23)
(23)
其中
DAB的控制目标有两个:①输出电压快速跟踪其参考值;②控制过程尽可能平滑稳定,不产生过大的超调和振荡。
可以通过构造如下的代价函数来评价其输出性能为
 (24)
(24)
式中, 为
为 时刻的输出电压参考值;
时刻的输出电压参考值; 为控制量权重因子,
为控制量权重因子, 时表示控制器不考虑控制量的大小,并尽量减小输出误差,取较大值表示将限制控制量的大小。
时表示控制器不考虑控制量的大小,并尽量减小输出误差,取较大值表示将限制控制量的大小。
采用滚动优化方法对代价函数进行求解,在每个采样时刻预测未来P步的变化,但仅采用第一步的控制量用于控制,下一个控制周期,继续滚动向前优化控制,即每一步都是当前时刻的最优控制。
优化求解的目标就是让代价函数取值最小,即
 (25)
(25)
代入式(23),仅考虑控制量D为相关变量,可以将代价函数进一步改写为
 (26)
(26)
式中, 为当前时刻电压采样值。
为当前时刻电压采样值。
对式(26)求极值,可得最优移相控制量为
 (27)
(27)
仅取第一步得控制量作用于DAB,即当前控制量为
 (28)
(28)
模型预测与应力优化混合控制原理如图5所示。
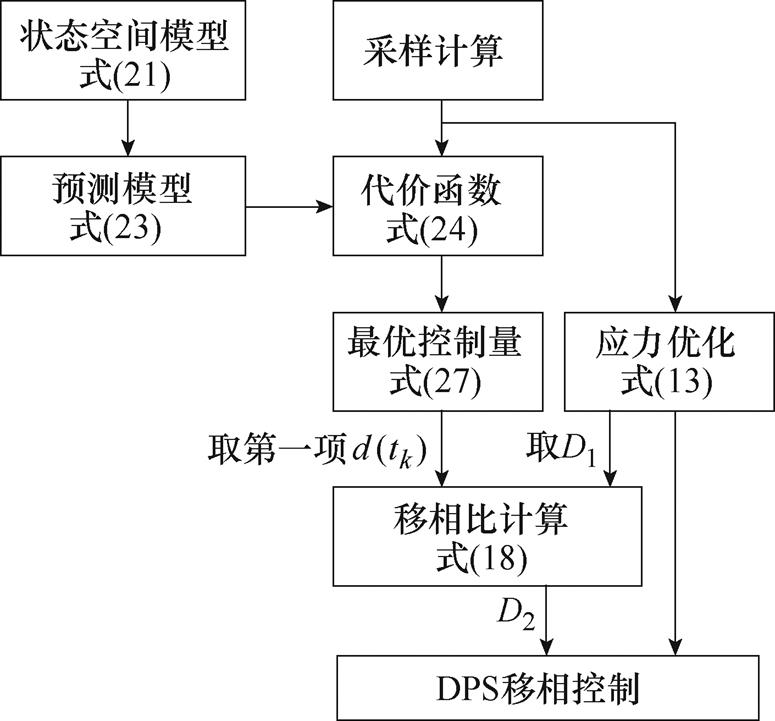
图5 模型预测与应力优化混合控制原理
Fig.5 Principle of model predictive control and current stress optimization
首先,基于系统状态空间模型,建立模型预测控制模型;其次,构造系统代价函数并求解出最优控制量,进一步计算出最优移相组合控制量 ;再次,再结合应力优化结果,利用式(13)和式(18)计算出内外移相比
;再次,再结合应力优化结果,利用式(13)和式(18)计算出内外移相比 和
和 ;最后,将内外移相比用于DPS控制。
;最后,将内外移相比用于DPS控制。
模型预测控制对系统的模型精度具有一定的依赖性,如果模型的参数产生偏差,即模型参数失配,模型预测控制将产生稳态误差。当DAB的电路参数存在误差时,会导致模型失配,控制输出将产生稳态误差值。
根据状态空间方程,DAB变换器的辅助电感值L和输出电容值Co均会对模型的控制精度产生影响。有必要分析模型预测控制算法对辅助电感和输出电容参数的敏感性。
假设辅助电感误差系数 和输出电容误差系数
和输出电容误差系数 分别为
分别为
 (29)
(29)
式中, 、
、 为控制模型中的理论值;
为控制模型中的理论值; 、
、 为电路中的实际值。
为电路中的实际值。
对不同误差系数下DAB的输出进行分析,研究其对输出误差的影响。
令输出电压误差比为
 (30)
(30)
式中, 为输出电压参考值。
为输出电压参考值。
在Matlab中进行仿真,假设辅助电感和输出电容的误差系数在0.5~1.5之间变化,可以获得DAB的输出误差比与参数误差系数的关系如图6所示。
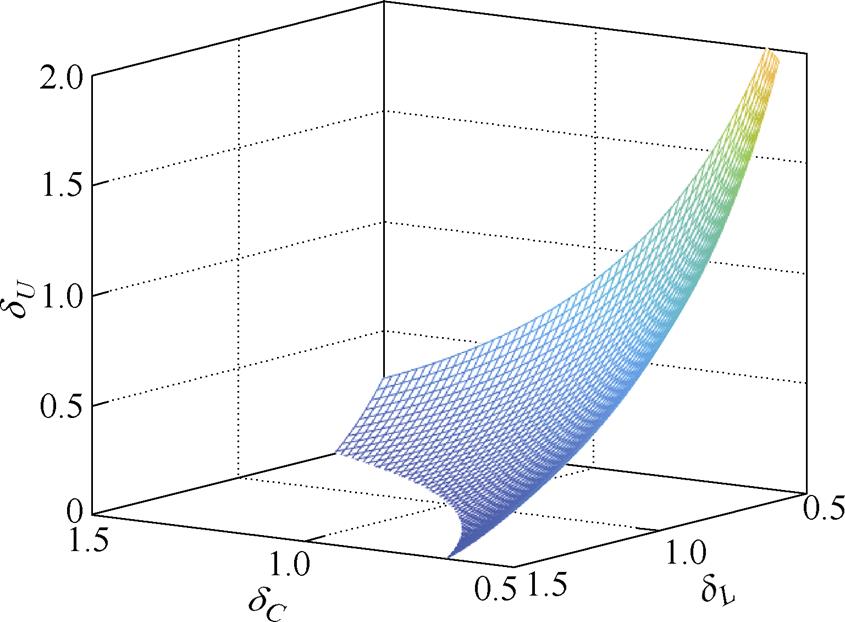
图6 DAB输出误差分析
Fig.6 Output error analysis of DAB
针对图6进行参数敏感性分析,当DAB模型误差系数=1时,输出稳态误差值为零,即没有误差;当 时,输出误差值达到2%;当
时,输出误差值达到2%;当 时,输出误差值同样达到2%。由此可知,传统模型预测控制对DAB模型参数的依赖较为明显,系统鲁棒性差。因此,当DAB模型参数失配时,传统模型预测控制将产生不可避免的稳态输出误差,需要采取相应措施来抑制模型失配的影响。
时,输出误差值同样达到2%。由此可知,传统模型预测控制对DAB模型参数的依赖较为明显,系统鲁棒性差。因此,当DAB模型参数失配时,传统模型预测控制将产生不可避免的稳态输出误差,需要采取相应措施来抑制模型失配的影响。
针对模型参数失配问题,主要的解决方案分为三大类:①建立扰动观测器来减小稳态误差,但是观测器的稳定性会降低系统控制性能;②进行在线模型参数估计,实施修正模型参数,但其缺点是计算过程非常复杂;③改进预测模型,增加误差反馈通道来抑制误差,原理相对简单且容易实现。
本文采用第③类方法,针对传统模型预测控制的模型参数失配问题,提出一种简单实用的稳态误差校正方法。具体地,通过将预测误差实时反馈到预测模型中,构成闭环负反馈来降低稳态误差。
控制对象及运行环境的非线性和不确定性,在k时刻实施控制作用后,k+1时刻的实际输出 和此前k时刻预测的输出
和此前k时刻预测的输出 不一定相等,将产生预测误差为
不一定相等,将产生预测误差为
 (31)
(31)
为了减小预测误差,可采用经过误差校正后的值对未来其他时刻预测值进行校正预测,即
 (32)
(32)
式中, 为误差校正因子。
为误差校正因子。
式(32)写成矩阵形式为
 (33)
(33)
式中, 为k+1时刻经误差校正后所预测的输出电压;
为k+1时刻经误差校正后所预测的输出电压;
 为误差校正向量。
为误差校正向量。
经校正后的 作为下一时刻的预测值,利用k+1时刻的预测初值预测了k+2, k+3,…, k+P时刻的输出值,可令
作为下一时刻的预测值,利用k+1时刻的预测初值预测了k+2, k+3,…, k+P时刻的输出值,可令
 (34)
(34)
可得未来P时域内的预测初值为
 (35)
(35)
通过引入误差修正,使系统成为一个闭环系统,能够提高系统的稳定性和控制性能,而且校正器只有当误差存在时才发生作用。
为了验证本文所提出的模型预测与应力优化混合控制策略的有效性,在实验室搭建DAB与电机控制的微型样机实验平台,如图7所示。该实验平台包括直流稳压电源、DAB、电机、逆变器、触摸屏和示波器等。核心组成单元DAB的主要参数见表1,系统开关周期、控制周期与采样周期相同,均为50 ms,即开关频率、控制频率和采样频率均为20 kHz。
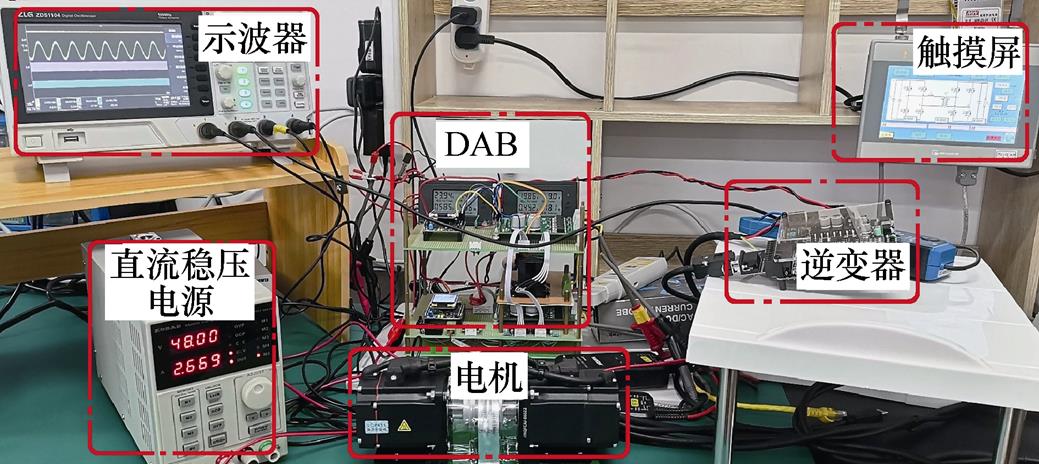
图7 DAB与电机控制微型实验平台
Fig.7 Scaled-down experimental platform of DAB and motor controller
表1 DAB参数
Tab.1 Parameters of DAB
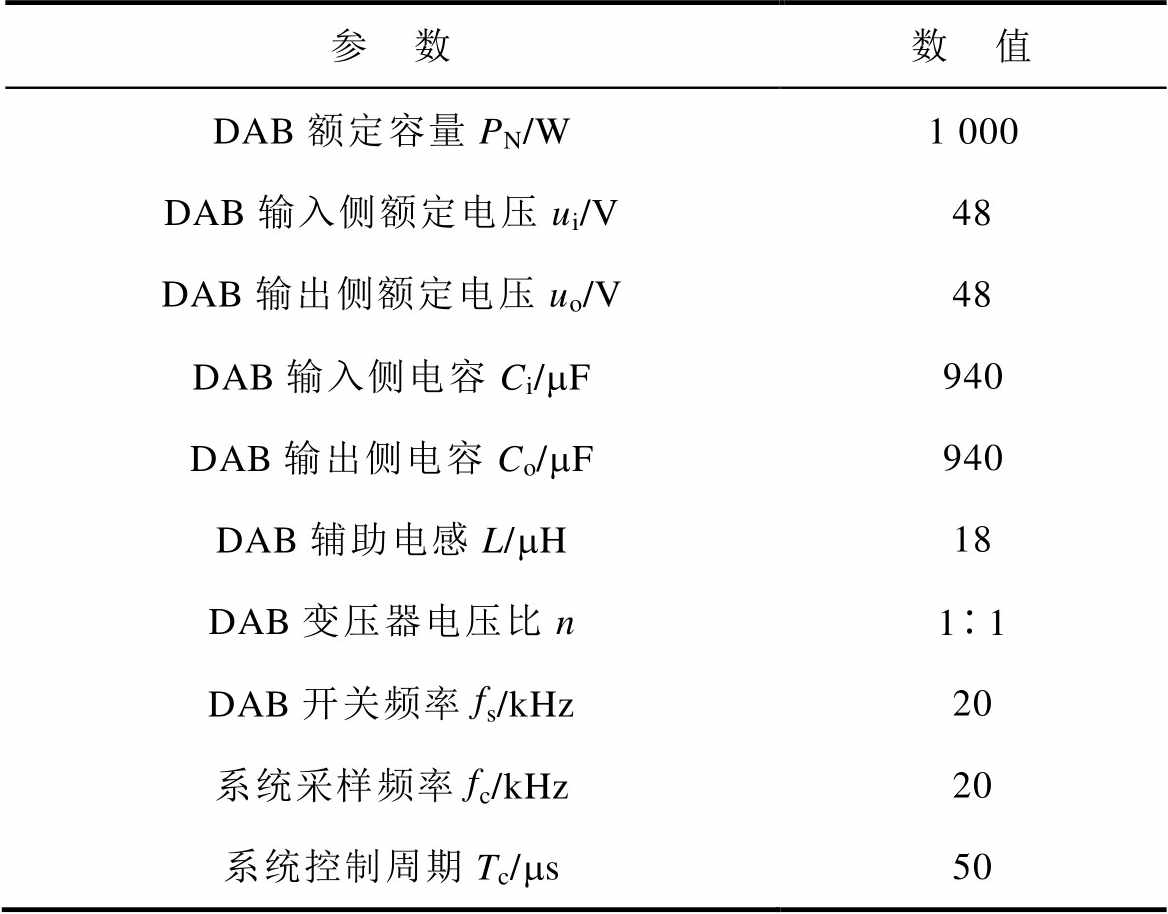
参 数数 值 DAB额定容量PN/W1 000 DAB输入侧额定电压ui/V48 DAB输出侧额定电压uo/V48 DAB输入侧电容Ci/mF940 DAB输出侧电容Co/mF940 DAB辅助电感L/mH18 DAB变压器电压比n11 DAB开关频率fs/kHz20 系统采样频率fc/kHz20 系统控制周期Tc/ms50
目前,国内外已有的DAB模型预测控制大多基于SPS调制策略,没有应力优化特性,而本文采用DPS调制策略,具有应力优化特性。因此,本文将与具有应力优化特性的其他先进控制策略[11, 26]进行对比,分别对纯电阻负载和电机负载下所提控制策略的稳态和动态性能进行实验验证。
DAB的负载采用纯电阻负载,选择基于SPS的PI控制(SPS-PI)[11]、基于DPS的PI控制(DPS- PI)[11]、基于DPS的负载电流前馈控制(DPS- LCFF)[26]和本文所提出的基于DPS的模型预测与应力优化混合控制(DPS-MPC-CSO)进行稳态控制性能比较。
图8为电阻负载下DAB采用不同控制策略下的稳态实验波形。设定DAB输入电压 =48 V、输出电压
=48 V、输出电压 参考值为32 V,电压比k=1.5,即DAB工作于电压不匹配状态。分别采用SPS-PI、DPS-PI、DPS-LCFF和DPS-MPC-CSO控制策略对DAB进行控制,观察每种控制策略下的波形。
参考值为32 V,电压比k=1.5,即DAB工作于电压不匹配状态。分别采用SPS-PI、DPS-PI、DPS-LCFF和DPS-MPC-CSO控制策略对DAB进行控制,观察每种控制策略下的波形。
SPS-PI控制下电感电流峰值为16.2 A,DPS-PI的电感电流峰值为13.1 A、DPS-LCFF的峰值电流为13.0 A,DPS-MPC-CSO的电感电流峰值为13.1 A。SPS-PI控制下的电感电流峰值要大于DPS-PI、DPS- LCFF和DPS-MPC-CSO控制下的电感电流峰值。
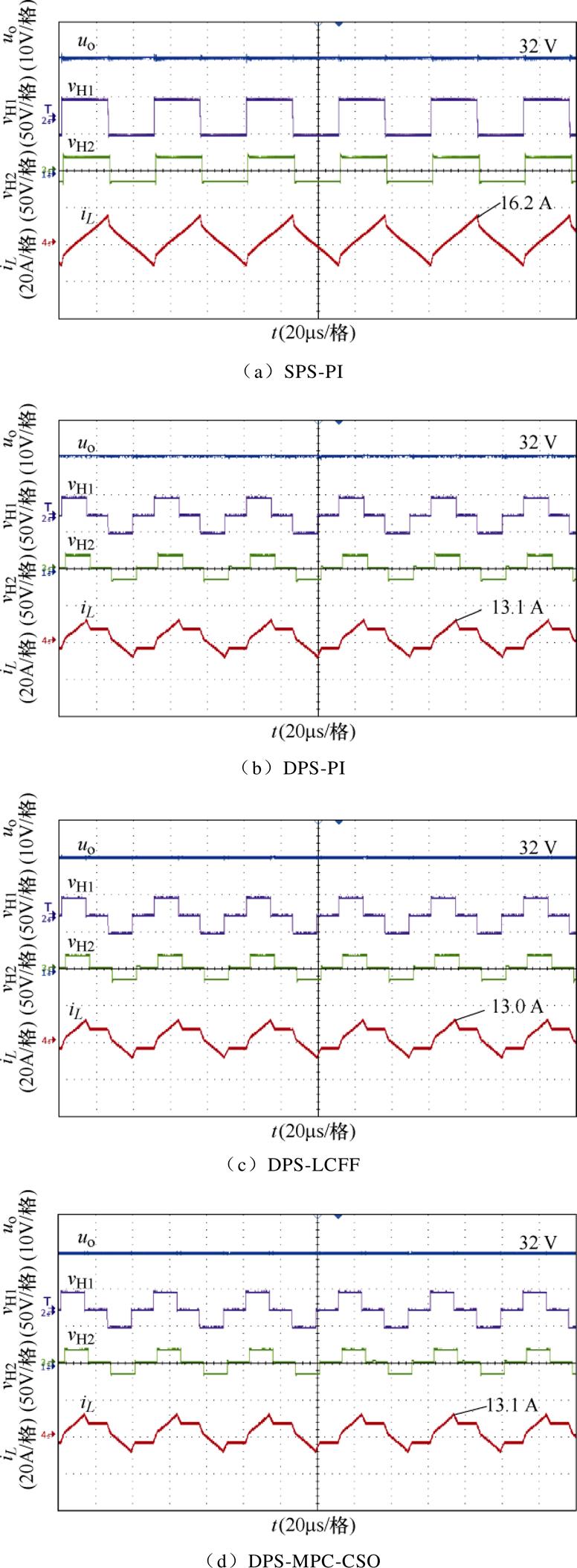
图8 稳态实验波形
Fig.8 Experimental waveforms of steady-state experiment
DPS-PI、DPS-LCFF和MPC-CSO控制下的电流应力基本相同。这是因为当k>1时,DPS-PI、DPS-LCFF和DPS-MPC-CSO采用了电流应力优化措施,其计算出的内相移角D1不是零,即DPS-PI、DPS-LCFF和DPS-MPC-CSO均可以有效地降低电流应力,这与理论分析结果一致。
图9为DAB电路在上述电阻负载下采用不同母线控制策略下的红外热成像,其控制策略及工作条件与图8稳态实验完全相同。由热成像可知,环境温度为24℃左右,DAB电路的热点主要围绕在MOSFET模块附近。其中,SPS-PI控制[11]下MOSFET温度为57.3℃,DPS-PI[11]控制下MOSFET温度为49.5℃,DPS-LCFF控制[26]下MOSFET温度为48.2℃,DPS-MPC-CSO控制下的MOSFET温度为48.4℃。考虑到红外热像仪的测量误差大约为1℃,可以认为SPS-PI控制下的功率器件温升值要远大于DPS-PI、DPS-LCFF和DPS-MPC-CSO控制下的温升值,而DPS-PI、DPS-LCFF和DPS-MPC-CSO控制下的温升值基本相同。由于功率器件温升值与其电流应力呈正相关,本实验结果与稳态电流应力实验结果可相互印证。总之,降低系统电流应力可有效降低其发热损耗,提高系统能量利用效率。
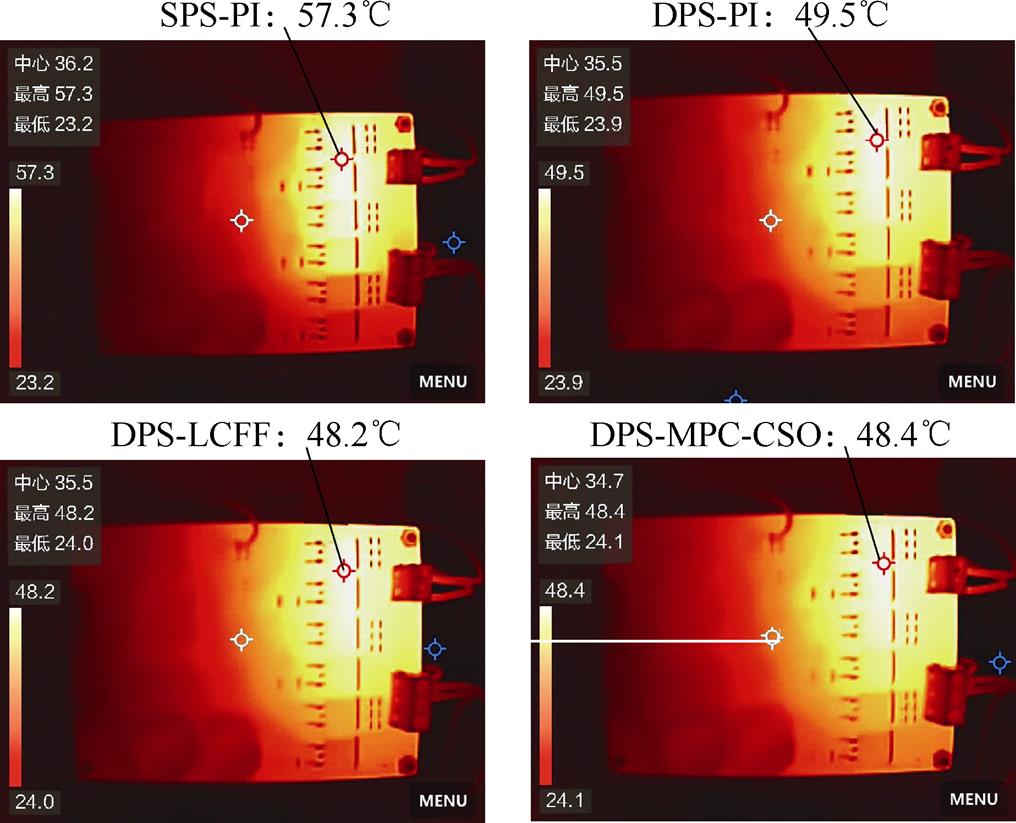
图9 稳态实验红外热成像
Fig.9 Infrared thermograph of steady-state experiment
为了验证所提模型预测与应力优化混合控制策略在动态性能方面的有效性,选择DPS-PI[11]、DPS- LCFF[26]和所提出的DPS-MPC-CSO共三种控制策略进行负载阶跃实验。
图10为负载电阻从R=6 W 突变到12 W 时的DAB变换器实验波形。DAB输入电压为48 V,输出电压参考值为32 V。DPS-PI的稳定时间和超调量分别为60 ms和7 V,DPS-LCFF的稳定时间和超调量分别为40 ms和4 V,DPS-MPC-CSO的稳定时间和超调量分别为5 ms和1 V。
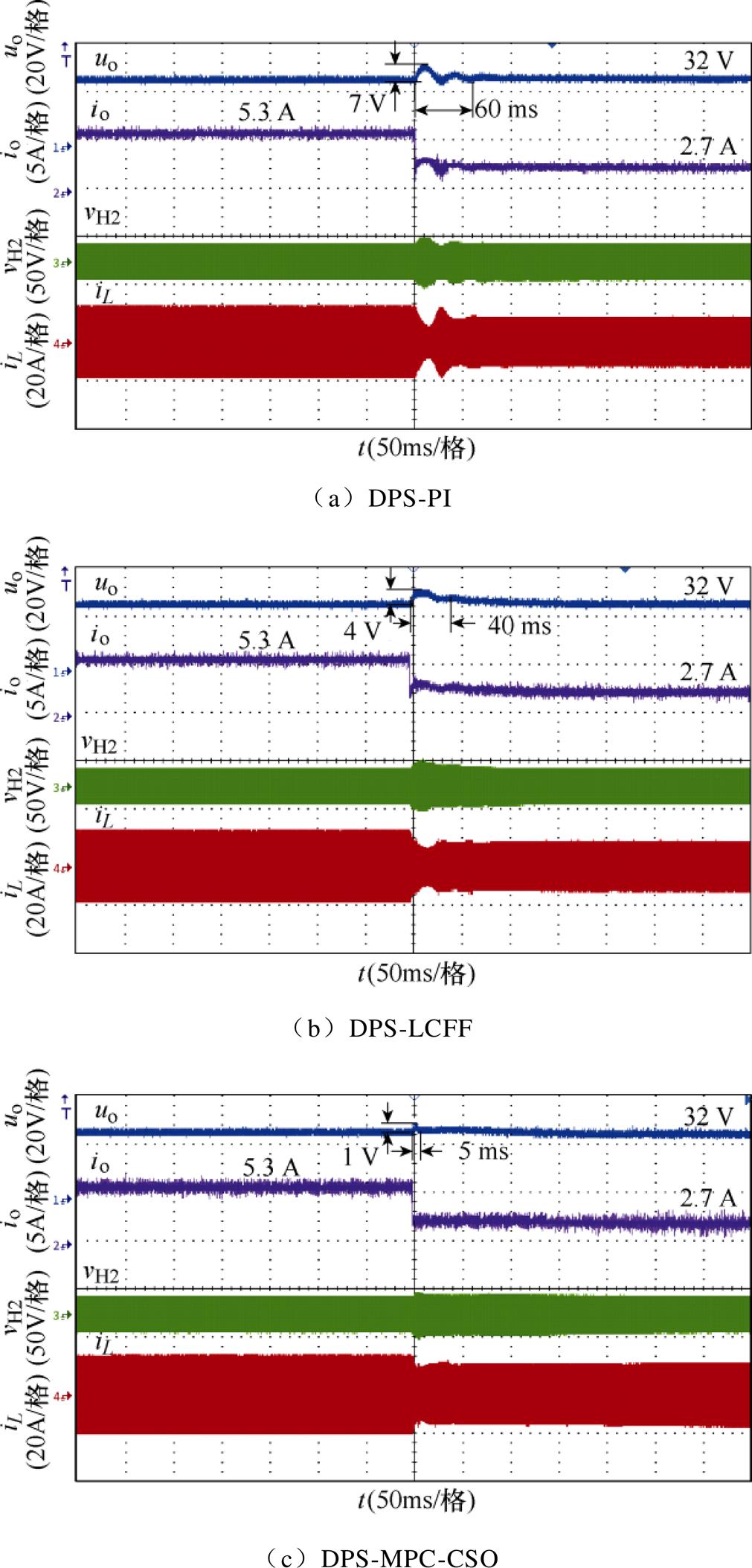
图10 动态实验波形
Fig.10 Experimental waveforms of dynamic experiment
比较三种方法的稳定时间和超调量指标,发现与其他两种方法相比,本文所提出的DPS-MPC- CSO的稳定时间和超调量可以忽略不计。
由于输出电压不受负载突变的影响,其幅值几乎保持不变,大大提高了系统的动态响应性能。
为了验证所提模型预测与应力优化混合控制策略在参数敏感性方面的有效性,对所提出的DPS- MPC-CSO控制策略进行了参数敏感性实验。
图11为带误差校正和不带误差校正两种情况下模型预测控制算法的输出电压控制精度对比。实验参数为:输入电压48 V,输出电压参考值32 V,t=5 s以前,采用带误差校正控制策略;t=5~15 s,不采用误差校正措施;t=15 s以后恢复误差校正措施。
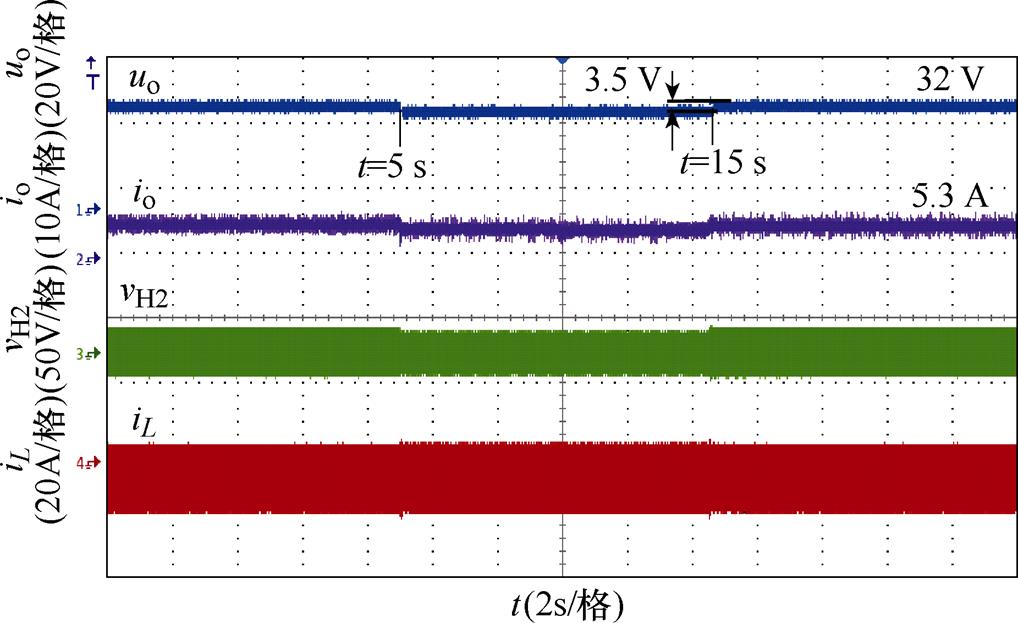
图11 参数敏感性实验波形
Fig.11 Experimental waveforms of parameter sensitivity
所提出的DPS-MPC-CSO模型基于辅助电感Ls=18 mH推导而来,当实际的物理电感值被修改为24 mH时,控制算法仍然按照18 mH进行计算。由图11可以看出,对于不带误差校正的DPS-MPC- CSO控制,当电感参数被改变时,输出电压产生稳态误差,约为3.5 V,而对于带误差校正的DPS-MPC- CSO控制,则可以消除该稳态误差。该实验结果表明,加入误差校正的模型预测控制方法对DAB电路参数不敏感,在不同电感下仍具有良好的控制精度,鲁棒性好。
在电机控制应用中,DAB的实际负载不是纯电阻,而是比电阻负载更复杂的三相逆变器及电机负载。为了验证提出的DPS-MPC-CSO控制方法在复杂负载情况下的控制性能,以采用三相逆变器拖动三相永磁电机的电机驱动系统作为DAB转换器的负载进行实验。电机驱动系统的参数见表2。
图12为系统稳态运行波形。系统采用变直流母线电压控制策略,输入电压48 V,当前输出电压参考值32 V,电压传输比k=1.5,对应的电机转速为2 000 r/min。由波形可以看出,电机运行平稳,且由于采用了电流应力优化措施,DAB电流应力约为13 A。
表3列出了三种不同速度工况下实验平台采用不同母线电压控制策略时的系统能量利用效率数据。定义了三种不同速度工况,分别为低速(1 000 r/min)工况、中速(2 000 r/min)工况和高速(3 000 r/min)工况,并分别采用两种不同母线电压控制策略进行控制。
表2 电机驱动系统参数
Tab.2 Parameters of the motor drive system
参 数数 值 (型号) 逆变器三相电压源逆变器 逆变器额定容量SN/(V·A)500 逆变器额定电压/V48 逆变器开关频率fs/kHz10 电机三相永磁同步电机 电机额定容量PN/W400 电机额定电压/V50 电机额定转速/(r/min)3 000
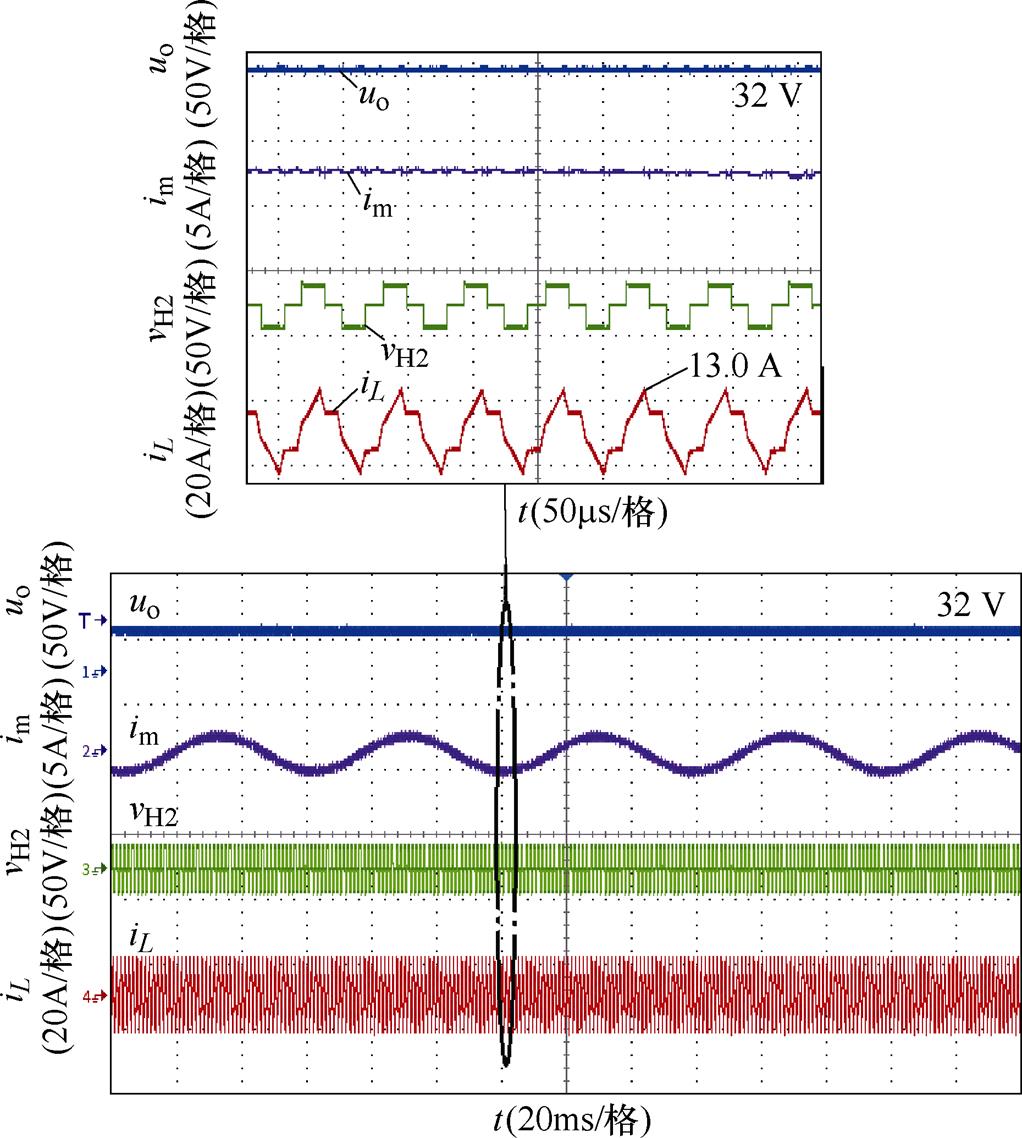
图12 稳态运行波形
Fig.12 The waveforms of the steady-state operation
表3 实验平台不同速度工况下效率对比
Tab.3 Comparison of efficiency of experimental platform under different speed conditions

速度工况母线电压控制策略DAB效率 (%)逆变器效率(%)综合效率 (%) 低速固定 (传统)—68.768.7 可变92.688.181.6 中速固定 (传统)—80.680.6 可变94.189.384.0 高速固定 (传统)—88.888.8 可变96.590.587.3
具体地,传统母线电压控制策略采用固定的母线电压,不论速度高低,均采用48 V母线电压进行控制;而可变母线电压控制策略则根据电机速度高低动态调整母线电压,低速(1 000 r/min)时母线电压为16 V,中速(2 000 r/min)时母线电压为32 V,高速(3 000 r/min)时母线电压为48 V。由表3可知,低速工况下系统综合效率由68.7%提高到了81.6%,中速工况下系统综合效率由80.6%提高到了84.0%,而高速工况下系统综合效率略有降低,由88.8%降到87.3%。
对比三种速度工况下效率数据,可得如下结论:采用可变直流母线电压控制策略时,虽然需要增加一级DAB变换环节,产生一定损耗,但是它能够较大程度地提高中低速工况下电机逆变器的转速与母线电压匹配度,进而提高逆变器工作效率,并最终提高系统综合效率。考虑到电动汽车在城市通勤的大部分时间处于中低速工况,本文所提解决方案具有一定的工程意义。
图13为电机加减速过程的波形。电机在6 s内从转速1 500 r/min加速到额定转速3 000 r/min,保持6 s,然后再在6 s内减速到1 500 r/min。电机在加速过程中系统直流母线电压从24 V逐渐升高到额定电压48 V,然后又逐渐降低到24 V。加减速过程中,三相逆变器的输出电流为对称的三相正弦波,低速时由于DAB输入输出电压不匹配,电流应力略大,约16.5 A,但随着电机转速不断增加,直流母线电压不断增加,达到额定电压时,电压传输比k=1,达到匹配状态,此时DAB的电流应力较小,约8.1 A。
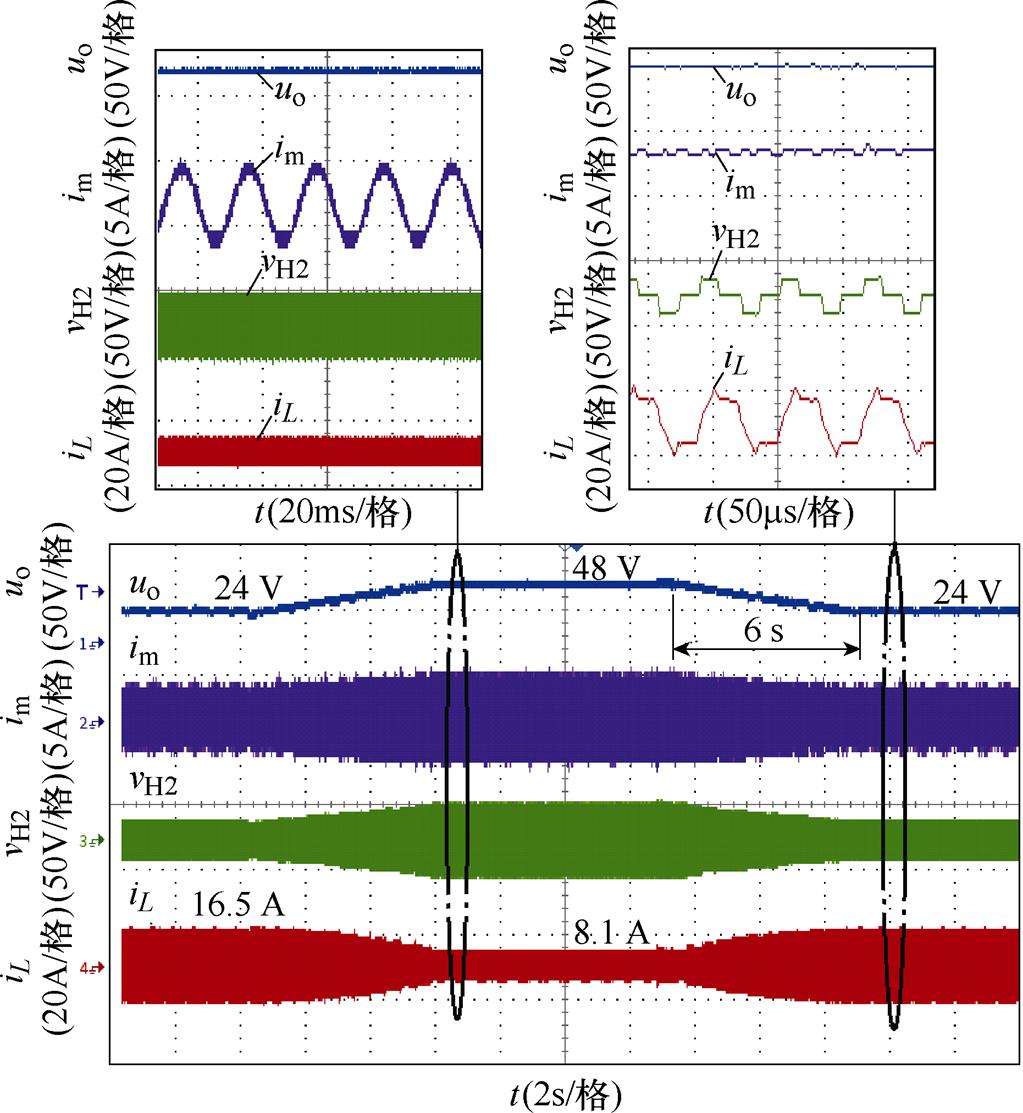
图13 变直流母线电压工作波形
Fig.13 The waveforms of variable DC bus voltage
本文将双有源桥DC-DC变换器置于电动汽车动力电池与电机控制器之间,可以根据电动汽车行驶工况动态调节直流母线电压,并提出一种模型预测与电流应力优化相混合的控制策略,总结如下:
1)与SPS-PI、DPS-PI和DPS-LCFF相比,所提出的DPS-MPC-CSO控制策略不仅具有良好的稳态性能,还具有优异的动态性能。当负载阶跃时,输出电压几乎保持不变,没有超调电压和快速的瞬态响应。
2)为了抑制模型参数失配对模型预测控制的不利影响,提出一种基于输出反馈的误差校正方法。参数灵敏度实验结果表明,该方法在不同电感条件下具有良好的动态性能,具有参数不敏感的优点,能提高模型预测控制的参数鲁棒性。
3)所提出的控制策略实现过程简单,具有较强的灵活性和适应性,能满足电动汽车电机驱动系统变直流母线电压工作要求。
参考文献
[1] 章回炫, 范涛, 边元均, 等. 永磁同步电机高性能电流预测控制[J]. 电工技术学报, 2022, 37(17): 4335-4345.
Zhang Huixuan, Fan Tao, Bian Yuanjun, et al. Predictive current control strategy of permanent magnet synchronous motors with high performance[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4335-4345.
[2] 边元均, 温旭辉, 范涛, 等. 车用电驱系统主动短路模型及参数设计[J]. 中国电机工程学报, 2022, 42(8): 3013-3023.
Bian Yuanjun, Wen Xuhui, Fan Tao, et al. Model and parameter design of active short circuit in vehicle electric drive system[J]. Proceedings of the CSEE, 2022, 42(8): 3013-3023.
[3] 章回炫, 范涛, 国敬, 等. 永磁同步电机位置信号误差的影响分析及消除[J]. 中国电机工程学报, 2020, 40(增刊1): 294-302.
Zhang Huixuan, Fan Tao, Guo Jing, et al. Analysis and elimination of position signal error of permanent magnet synchronous motor[J]. Proceedings of the CSEE, 2020, 40(S1): 294-302.
[4] 张栋, 范涛, 温旭辉, 等. 电动汽车用高功率密度碳化硅电机控制器研究[J]. 中国电机工程学报, 2019, 39(19): 5624-5634, 5890.
Zhang Dong, Fan Tao, Wen Xuhui, et al. Research on high power density SiC motor drive controller[J]. Proceedings of the CSEE, 2019, 39(19): 5624-5634, 5890.
[5] 张明远. 可变母线电压电机系统设计与降耗研究[D]. 上海: 上海交通大学, 2020.
[6] De Simone D, Piegari L. Modular multilevel converters for battery electric vehicles: variable dc voltage control to optimize battery lifetime[C]//2020 IEEE 14th International Conference on Compatibility, Power Electronics and Power Engineering (CPE- POWERENG), Setubal, Portugal, 2020: 137-142.
[7] Liu Libo, Götting G, Xie Jian. Loss minimization using variable DC-link voltage technique for permanent magnet synchronous motor traction system in battery electric vehicle[C]//2018 IEEE Vehicle Power and Propulsion Conference (VPPC), Chicago, IL, USA, 2019: 1-5.
[8] Gupta A, Ayyanar R, Chakraborty S. Novel electric vehicle traction architecture with 48 V battery and multi-input, high conversion ratio converter for high and variable DC-link voltage[J]. IEEE Open Journal of Vehicular Technology, 2021, 2: 448-470.
[9] Tao Wenjie, Wei Jiadan, Ji Jianhao, et al. The optimal direct torque control strategy for open-winding permanent magnet synchronous motor in variable DC voltage conditions[C]//2019 IEEE Energy Conversion Congress and Exposition (ECCE), Maryland, Baltimore, MD, USA, 2020: 4018-4023.
[10] Prabhakar K K, Chinthakunta U R, Singh A K, et al. Efficiency and performance analysis of DTC-based IM drivetrain using variable DC-link voltage for electric vehicle applications[J]. IET Electrical Systems in Transportation, 2018, 8(3): 205-214.
[11] 赵彪, 安峰, 宋强, 等. 双有源桥式直流变压器发展与应用[J]. 中国电机工程学报, 2021, 41(1): 288-298, 418.
Zhao Biao, An Feng, Song Qiang, et al. Development and application of DC transformer based on dual- active-bridge[J]. Proceedings of the CSEE, 2021, 41(1): 288-298, 418.
[12] Mu Shujun, Guo Zhiqiang, Luo Yong. Universal modulation scheme to suppress transient DC bias current in dual active bridge converters[J]. IEEE Transactions on Power Electronics, 2022, 37(2): 1322-1333.
[13] Shu Dongdong, Wang Haoyu, Zhou Mingde. Universal control scheme to achieve seamless dynamic transition of dual-active-bridge converters using zero-current-prediction[J]. IEEE Transactions on Industrial Electronics, 2022, 69(6): 5826-5834.
[14] 胡燕, 张天晖, 杨立新, 等. 双重移相DAB变换器回流功率优化与电流应力优化的对比研究[J]. 中国电机工程学报, 2020, 40(增刊1): 243-253.
Hu Yan, Zhang Tianhui, Yang Lixin, et al. Comparative study of reactive power optimization and current stress optimization of DAB converter with dual phase shift control[J]. Proceedings of the CSEE, 2020, 40(S1): 243-253.
[15] 杨向真, 王锦秀, 孔令浩, 等. 电压不匹配运行条件下双有源桥变换器的效率优化方法[J]. 电工技术学报, 2022, 37(24): 6239-6251.
Yang Xiangzhen, Wang Jinxiu, Kong Linghao, et al. Efficiency optimization method of DAB converters under wide-voltage operating conditions[J]. Transa- ctions of China Electrotechnical Society, 2022, 37(24): 6239-6251.
[16] 范恩泽, 李耀华, 葛琼璇, 等. 基于优化移相的双有源串联谐振变换器前馈控制策略[J]. 电工技术学报, 2022, 37(20): 5324-5333.
Fan Enze, Li Yaohua, Ge Qiongxuan, et al. Feedforward control strategy of dual active bridge series resonant converter based on optimized phase shift[J]. Transactions of China Electrotechnical Society, 2022, 37(20): 5324-5333.
[17] 涂春鸣, 管亮, 肖凡, 等. 基于扩展移相控制下双有源桥移相角优化选取与分析[J]. 电工技术学报, 2020, 35(4): 850-861.
Tu Chunming, Guan Liang, Xiao Fan, et al. Parameter optimization selection and analysis of dual active bridge based on extended phase shift control[J]. Transactions of China Electrotechnical Society, 2020, 35(4): 850-861.
[18] 高宇, 李若愚, 李林柘, 等. 三重移相调制模式下双有源变换器的直接功率控制[J]. 电工技术学报, 2022, 37(18): 4707-4719.
Gao Yu, Li Ruoyu, Li Linzhe, et al. Triple phase shift modulation-based direct power control strategy for a dual active bridge converter[J]. Transactions of China Electrotechnical Society, 2022, 37(18): 4707-4719.
[19] 王聪, 沙广林, 王俊, 等. 基于双重移相控制的双有源桥DC-DC变换器的软开关[J]. 电工技术学报, 2015, 30(12): 106-113.
Wang Cong, Sha Guanglin, Wang Jun, et al. The analysis of zero voltage switching dual active bridge DC-DC converters based on dual-phase-shifting control[J]. Transactions of China Electrotechnical Society, 2015, 30(12): 106-113.
[20] 吴俊娟, 孟德越, 申彦峰, 等. 双重移相控制与传统移相控制相结合的双有源桥式DC-DC变换器优化控制策略[J]. 电工技术学报, 2016, 31(19): 97- 105.
Wu Junjuan, Meng Deyue, Shen Yanfeng, et al. Optimal control strategy of dual active bridge DC-DC converter with combined dual-phase-shift and traditional-phase-shift controls[J]. Transactions of China Electrotechnical Society, 2016, 31(19): 97-105.
[21] 王攀攀, 徐泽涵, 王莉, 等. 基于三重移相的双有源桥DC-DC变换器效率与动态性能混合优化控制策略[J]. 电工技术学报, 2022, 37(18): 4720-4731.
Wang Panpan, Xu Zehan, Wang Li, et al. A hybrid optimization control strategy of efficiency and dynamic performance of dual-active-bridge DC-DC converter based on triple-phase-shift[J]. Transactions of China Electrotechnical Society, 2022, 37(18): 4720-4731.
[22] 王武, 雷文浩, 蔡逢煌, 等. 结合电流应力优化的双有源全桥DC-DC变换器自抗扰控制[J]. 电工技术学报, 2022, 37(12): 3073-3086.
Wang Wu, Lei Wenhao, Cai Fenghuang, et al. Active disturbance rejection control of dual-active-bridge DC-DC converter with current stress optimization[J]. Transactions of China Electrotechnical Society, 2022, 37(12): 3073-3086.
[23] 陈杨帆, 张宇. 输出短路故障下的DAB暂态过流分析[J]. 中国电机工程学报, 2021, 41(2): 667-681.
Chen Yangfan, Zhang Yu. Transient overcurrent analysis of dual active bridges under short circuits of loads[J]. Proceedings of the CSEE, 2021, 41(2): 667-681.
[24] Capó-Uiteras M, Oggier G G, Bullich-Massaguė E, et al. Analytical and normalized equations to implement the optimized triple phase-shift modulation strategy for DAB converters[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2023, 11(3): 3535-3546.
[25] 蔡逢煌, 石安邦, 江加辉, 等. 结合电流应力优化与虚拟电压补偿的双有源桥DC-DC变换器三重移相优化控制[J]. 电工技术学报, 2022, 37(10): 2559- 2571.
Cai Fenghuang, Shi Anbang, Jiang Jiahui, et al. Triple-phase-shift optimal control of dual active brige DC-DC converter with current stress optimization and virtual voltage compensation[J]. Transactions of China Electrotechnical Society, 2022, 37(10): 2559- 2571.
[26] 侯聂, 宋文胜, 武明义. 双向全桥DC-DC变换器的负载电流前馈控制方法[J]. 中国电机工程学报, 2016, 36(9): 2478-2485.
Hou Nie, Song Wensheng, Wu Mingyi. A load current feedforward control scheme of dual active bridge DC-DC converters[J]. Proceedings of the CSEE, 2016, 36(9): 2478-2485.
[27] 马宇鸣, 刘丛伟, 刘建伟, 等. 双有源桥DC-DC变换器的模型预测控制[J]. 冶金自动化, 2020, 44(增刊1): 78-85.
Ma Yuming, Liu Congwei, Liu Jianwei, et al. Model predictive control of dual active bridge converter[J]. Metallurgical Industry Automation, 2020, 44(S1): 78-85.
[28] 安峰, 宋文胜, 杨柯欣. 电力电子变压器的双有源全桥DC-DC变换器模型预测控制及其功率均衡方法[J]. 中国电机工程学报, 2018, 38(13): 3921-3929, 4034.
An Feng, Song Wensheng, Yang Kexin. Model predictive control and power balance scheme of dual-active-bridge DC-DC converters in power electronic transformer[J]. Proceedings of the CSEE, 2018, 38(13): 3921-3929, 4034.
[29] 周兵凯, 杨晓峰, 张智, 等. 能量路由器中双有源桥直流变换器多目标优化控制策略[J]. 电工技术学报, 2020, 35(14): 3030-3040.
Zhou Bingkai, Yang Xiaofeng, Zhang Zhi, et al. Multi-objective optimization control strategy of dual-active-bridge DC-DC converter in electric energy router application[J]. Transactions of China Electrotechnical Society, 2020, 35(14): 3030-3040.
[30] Li Jiayao, Song Wensheng, Yue Hao, et al. An improved MPC with reduced CMV and current distortion for PMSM drives under variable DC-bus voltage condition in electric vehicles[J]. IEEE Transactions on Power Electronics, 2023, 38(4): 5167-5177.
Abstract Placing a dual active bridge (DAB) DC-DC converter between the power battery and the motor controller of an electric vehicle can adjust the DC link voltage according to motor speed, improving the energy conversion efficiency of the motor drive system. However, it also brings the following challenges. The wide range variation of DC bus voltage in the motor drive system can cause mismatched input and output voltage of the DAB converter, resulting in problems such as a sharp increase in current stress, loss of soft switches, and increased losses, ultimately reducing system efficiency. Moreover, for the rapid release and recovery characteristics of enormous energy during electric vehicle operation, DAB converters need to withstand high voltage and current impacts, maintaining a fast dynamic response speed.
Therefore, the current stress characteristics and optimization methods of DAB converters under dynamic DC link voltage are analyzed, and the model predictive control method is studied. Accordingly, a control strategy that combines model prediction control and current stress optimization is proposed. The current stress optimization control is embedded into the model predictive control for improving the steady and dynamic performance of the system and reducing the current stress. In addition, the discrete state space model of the output capacitor is established according to the circuit topology. Then, the model predictive control strategy is used to calculate the future output voltage in the prediction time domain according to the current output voltage value of the DAB converter. Furthermore, a cost function is constructed to evaluate the output performance of the DAB converter, and a rolling optimization method is used to solve the cost function and calculate the optimized phase shift control combination variable. Finally, the internal and external phase shift ratios D1 and D2 are calculated. An error correction method based on output feedback is proposed to suppress the adverse effects of model parameter mismatch on model predictive control. With the error correction method, the proposed hybrid control of model prediction and current stress optimization has the advantage of parameter insensitivity and good dynamic performance under different inductance conditions, improving the parameter robustness.
A micro prototype experimental platform for the DAB converter and motor drive system is built in the laboratory. The proposed control strategy has good steady-state characteristics and can effectively reduce current stress, almost identical to other optimization control strategies. Regarding dynamic performance, the stability time and overshoot can be almost ignored, and the output voltage is unaffected by transient changes such as sudden load change. The experimental results show that the proposed control strategy has a simple imple- mentation process, strong flexibility, and adaptability, which can meet the requirements of variable DC bus voltage operation in electric vehicle motor drive systems. It provides a theoretical basis for the design and control of motor controllers featuring a DAB converter positioned before the DC link in EV applications.
keywords:Dual active bridge, DC-DC converter, model predictive control, current stress optimization
DOI: 10.19595/j.cnki.1000-6753.tces.230590
中图分类号:TM46
湖南省教育厅科学研究资助项目(22A0213)。
收稿日期 2023-05-01
改稿日期 2023-06-06
关维德 男,1981年生,讲师,硕士生导师,研究方向为电动汽车电驱动系统及其电能变换技术。E-mail: guanweide@csust.edu.cn(通信作者)
李 涛 男,1999年生,硕士研究生,研究方向为新能源发电及电力电子变换器控制。E-mail: 949459177@qq.com
(编辑 陈 诚)