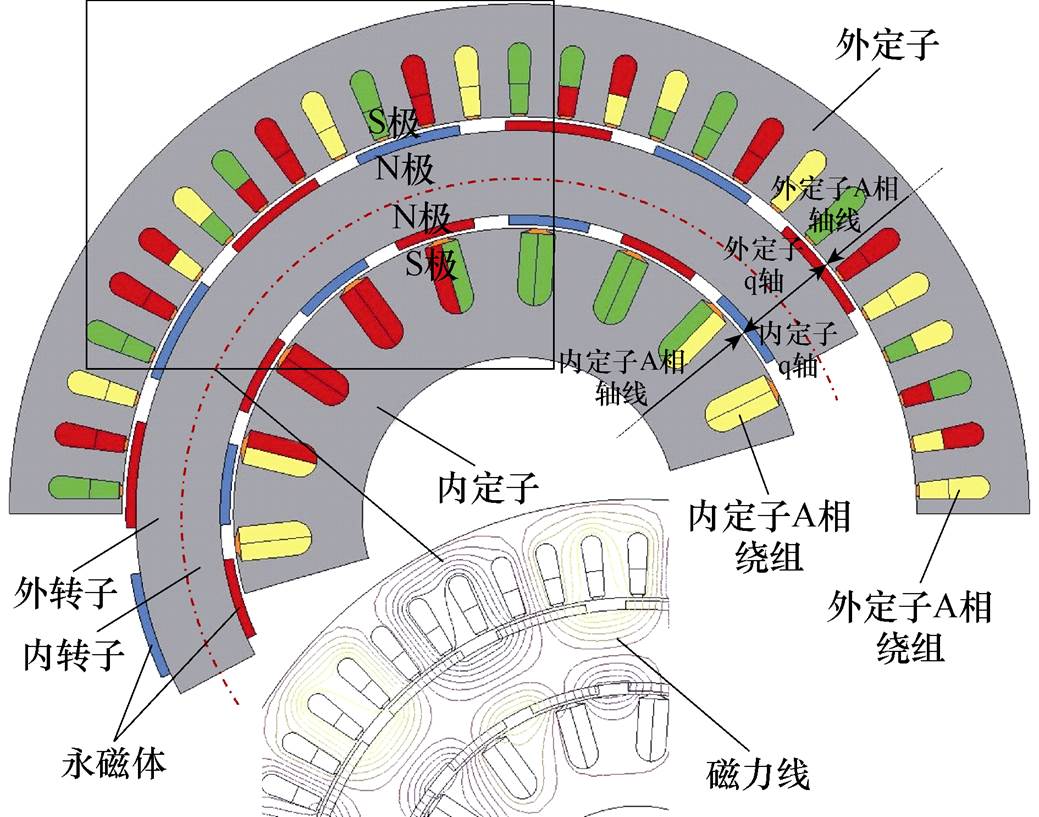
图1 DLHPMDM的二维半模型(初始时刻)
Fig.1 The 2D half model of DLHPMDM at the initial moment
摘要 双定子低速大转矩永磁直驱电机(DLHPMDM)具有高转矩密度和高效率等优点,是传统低速大转矩传动系统的良好替代方案。DLHPMDM可以看作由内、外两台电机构成的整体。绕组形式选择不仅直接影响内、外电机的转矩性能,内、外电机不同绕组形式的组合还会改变内、外电机输出转矩的叠加效果,最终影响DLHPMDM的转矩脉动水平。首先,基于双定子电机的转矩叠加原理,提出一种抑制DLHPMDM转矩脉动的设计方法,采用解析法分析内、外电机反电动势谐波相位差如何影响纹波转矩的叠加效果,并对内定子采用不同绕组形式时DLHPMDM的转矩性能进行仿真分析和初步验证。其次,考虑到绕组谐波引起的谐波电流对转矩脉动的影响,采用以电压源为激励的有限元分析进一步验证了内、外电机选用合理的绕组形式组合时,内、外电机纹波转矩的叠加削减作用能够有效降低DLHPMDM的转矩脉动。最后,采用转矩脉动最低的设计方案试制了一台DLHPMDM样机并完成相关实验,实验结果验证了分析的准确性。
关键词:双定子永磁直驱电机 绕组形式 转矩叠加原理 纹波转矩 转矩脉动
永磁直驱电机凭借高效率、高可靠性和低污染等优势,在低速大转矩传动系统中得到越来越广泛的应用[1-3]。然而,由于低速大转矩永磁直驱电机的体积通常较大,转矩密度较低,限制了其进一步发展和应用。相比于常规的单定子电机,双定子电机的双层气隙结构可以有效地提高电机的磁负荷,进而改善电机的转矩密度。文献[4]中提出了一种双定子永磁游标电机,具有高转矩密度和高功率因数的特点,适用于低速大转矩传动系统。将双定子结构应用于低速大转矩永磁直驱电机是重要的研究方向[5]。
径向磁通低速大转矩电机的内径通常较大。双定子电机可以看作在一台外定子低速直驱电机内部增加一个定子,通过额外布置一套绕组增加电负荷以提高输出转矩[6]。定子电流密度是限制低速大转矩电机效率和转矩密度的关键因素[7]。因此,绕组形式的选择是双定子低速大转矩永磁电机设计中的关键环节之一。由于低速直驱电机通常选用较高的极对数,学者们通过优化设计减少定子槽数,以更好地利用双定子电机的内部空间。文献[8]中提出一种新型多极双定子永磁电机,外定子采用分数槽集中绕组减少定子槽数,内定子采用游标结构减少槽数,使得空间得到更加充分的利用,进而改善了转矩密度。然而,采用集中绕组可能会引起较为严重的次谐波,导致气隙磁场的总谐波失真增加[9]。文献[10]基于一台风力发电机用低速直驱电机,对选用分布式绕组和集中绕组时的电磁性能进行比较,最终以抑制转矩脉动和提高效率的目标来选用集中绕组。绕组形式不仅决定着低速大转矩电机的转矩密度,还会影响转矩脉动和效率等其他性能。绕组形式的选择需要结合电机的具体设计要求综合考虑,是一个值得深入探究的课题。
双定子电机设计和建模的一种常用方法是将电机分为内电机和外电机分别进行设计,然后把两台电机整合为一个整体继续仿真和优化,确定最终的设计方案[11-12]。这种设计方法为优化双定子电机的转矩性能提供了新思路。依据转矩叠加原理,双定子电机的输出转矩等于内、外电机输出转矩的叠加。因此,降低双定子电机的转矩脉动时,不能仅考虑削弱内电机或外电机各自转矩脉动,还应当关注内、外电机之间输出转矩的叠加影响。文献[13]中设计了一台内、外电机具有相同极数和定子槽数的双定子低速直驱电机。由于极数和槽数相同,内、外电机具有相同的齿槽转矩周期数,通过调整内、外层永磁体之间的相对位置,使内、外电机的齿槽转矩因相位相反而叠加削弱,进而降低了双定子电机总的齿槽转矩。优化极槽数配合是降低电机转矩脉动的有效方法[14]。对于双定子电机而言,优化内、外定子槽数配合也能够降低电机的转矩脉动。文献[15]中,通过改变内、外定子的槽数配合,使内、外电机的齿槽转矩因反相而相互抵消。然而,分析和优化双定子电机内、外定子槽数组合的相关文献较少。并且,相关研究主要关注对双定子电机齿槽转矩的削弱。本文将关注内、外定子槽数配合对双定子电机纹波转矩的影响,并进一步探究内、外电机采用不同绕组形式组合时对电机转矩性能影响。
本文基于采用并联式磁路结构的DLHPMDM,提出一种使内、外电机纹波转矩叠加削减而降低DLHPMDM总转矩脉动的设计方法。通过对比内定子分别采用假分数槽分布绕组、真分数槽分布绕组和真分数槽集中绕组时电机的转矩性能,研究了内、外电机不同绕组形式的组合对DLHPMDM转矩脉动的影响。本文将采用解析法、以电流源为激励的有限元分析、以电压源为激励的有限元分析和样机实验四种方式对该方法进行验证。
DLHPMDM包含两个定子和一个转子,其转子磁路结构对电机的电磁性能具有重要影响。DLHPMDM的二维半模型(初始时刻)如图1所示。本文中研究的DLHPMDM采用了内、外磁路并联的结构。内、外层永磁体均以表面贴装的方式固定在转子的内、外表面。根据图中标注的永磁体极性,内、外相对的两块永磁体充磁方向相反。由图1中的磁力线云图可得,采用这种磁路结构时内、外磁路间磁耦合很小。因此,DLHPMDM可以被分为内、外两个独立的电机分别进行设计(在图1中由红色点画线分隔,外电机是由外定子和外转子构成的一台外定子电机,内电机是由内定子和内转子构成的一台内定子电机)。进而,电机的设计更加灵活方便,对内定子采用不用绕组形式时电磁性能的对比研究也更清晰直观。
图1 DLHPMDM的二维半模型(初始时刻)
Fig.1 The 2D half model of DLHPMDM at the initial moment
内、外电机的电流超前角能够分别被确定和调整是DLHPMDM设计和控制的基本原则之一。考虑到内、外电机之间的磁路耦合较小,外电机相对于q轴的电流超前角gou是通过外电机的单独模型确定的,内电机的电流超前角gin也是基于相同的方法获得。
DLHPMDM内、外两套绕组并联连接到一台逆变器,可以减少所需逆变器的台数以节省控制方面的成本。内、外绕组的理想并联运行要求:①并联的两套绕组之间没有环流;②负载时DLHPMDM能够按照内、外电机的额定功率合理地分配负载; ③运行时DLHPMDM的总电流ito不能超过逆变器限制的最大电流imax。为了实现内、外绕组的理想并联,内、外电机需要满足条件
 (1)
(1)
式中,fin和fou分别为内、外电机的频率; 和
和 分别为内、外电机的反电动势;iin和iou分别为内、外电机的相电流。根据式(1),内、外电机的反电动势在幅值和相位方面都应近似相等。在此前提下,并联的两套绕组间电压相位差小,进而减小了绕组间环流。通过调整gou和gin,内、外电机反电动势的相位条件即可被满足。反电动势的幅值可以通过改变每相串联匝数N1来调整。此外,因为低速电机的绕组匝数通常较多,绕组阻抗大能够进一步抑制绕组间环流。
分别为内、外电机的反电动势;iin和iou分别为内、外电机的相电流。根据式(1),内、外电机的反电动势在幅值和相位方面都应近似相等。在此前提下,并联的两套绕组间电压相位差小,进而减小了绕组间环流。通过调整gou和gin,内、外电机反电动势的相位条件即可被满足。反电动势的幅值可以通过改变每相串联匝数N1来调整。此外,因为低速电机的绕组匝数通常较多,绕组阻抗大能够进一步抑制绕组间环流。
极槽数配合是影响DLHPMDM转矩性能的一个关键设计参数。此外,内定子和外定子的槽数配合对双定子电机的输出转矩也会产生显著影响。为了实现低转速,DLHPMDM通常被设计成多极结构。因此,采用每极每相槽数q较小的分数槽绕组以减少定子槽数,避免定子齿部磁饱和。外定子采用q接近1的假分数槽分布绕组,可以使得定子齿部磁通密度保持在可接受的水平。相比于外定子,内定子可利用的空间小,所以更易发生磁饱和,可能需要进一步减少内定子的槽数。假分数槽分布绕组、真分数槽分布绕组和真分数槽集中绕组三种绕组形式将被应用于内定子上进行对比研究。
本文中内、外电机都是8对极,候选的定子槽数Q列在表1中。绕组系数是选择定子槽数时的首要考虑因素,高绕组系数表明绕组利用率高,即可以减少每相串联匝数以降低电机铜耗。当定转子相对位置变化一定角度时,齿槽转矩的幅值将随着齿槽转矩周期数的增加而减小。定转子相对位置变化360°机械角度时,齿槽转矩的周期数取决于定子槽数Q和极数2p的最小公倍数,定义式为
 (2)
(2)
因此,更大的最小公倍数有利于电机实现低齿槽转矩设计。此外,可选的并联支路数越多,每槽导体数Ns的选择范围越大,即
 (3)
(3)
式中,m为相数;a为并联支路数。进而,通过改变每相串联匝数调节内、外电机反电动势的幅值更为准确。
表1 候选的定子槽数
Tab.1 The candidates of stator slot number

参数真分数槽集中绕组 (y1=1)真分数槽分布绕组 (y1=2)假分数槽分布绕组 (y1=3) Q182124273336394251545760 q3/87/161/29/1611/163/413/167/817/169/819/165/4 kw10.9450.8900.8660.7660.9540.9450.9180.8900.9510.9410.9260.910 Nc14433648432528144624336816432912240 amax218114121214
注:y1是绕组节距;kw1是基波绕组系数;Nc是定转子相对位置变化360°机械角度时齿槽转矩的周期数;amax是最大可选并联支路数。
综合考虑三个选择因素后,采用假分数槽分布绕组时定子槽数取为54,采用真分数槽分布绕组时定子槽数取为36,采用真分数槽集中绕组时定子槽数取为18。本文对内定子采用不同绕组形式时电机的转矩脉动进行对比研究,不同方案中DLHPMDM的主要设计参数(列于表2中)保持相同。为了表述方便,将内定子槽数为18的DLHPMDM标记成方案A,将内定子槽数为36的DLHPMDM标记成方案B,将内定子槽数为54的DLHPMDM标记成方案C,所有方案中DLHPMDM的外定子均为54槽。
永磁电机的转矩脉动由齿槽转矩和纹波转矩两部分组成。在分析和抑制DLHPMDM的转矩脉动时,仅考虑绕组形式分别对内电机和外电机的影响是不充分的也是不准确的。对于双定子结构电机,内、外电机输出转矩的叠加对总转矩脉动的影响是复杂的,值得进行深入分析和研究。下面将基于双定子永磁电机的转矩叠加原理对内、外电机之间转矩的叠加作用进行分析。双定子永磁电机的转矩叠加原理是指铁心磁饱和程度较小时,电机的总转矩等于内、外电机的转矩叠加,即
表2 DLHPMDM的主要设计参数
Tab.2 Main design parameters of the DLHPMDM
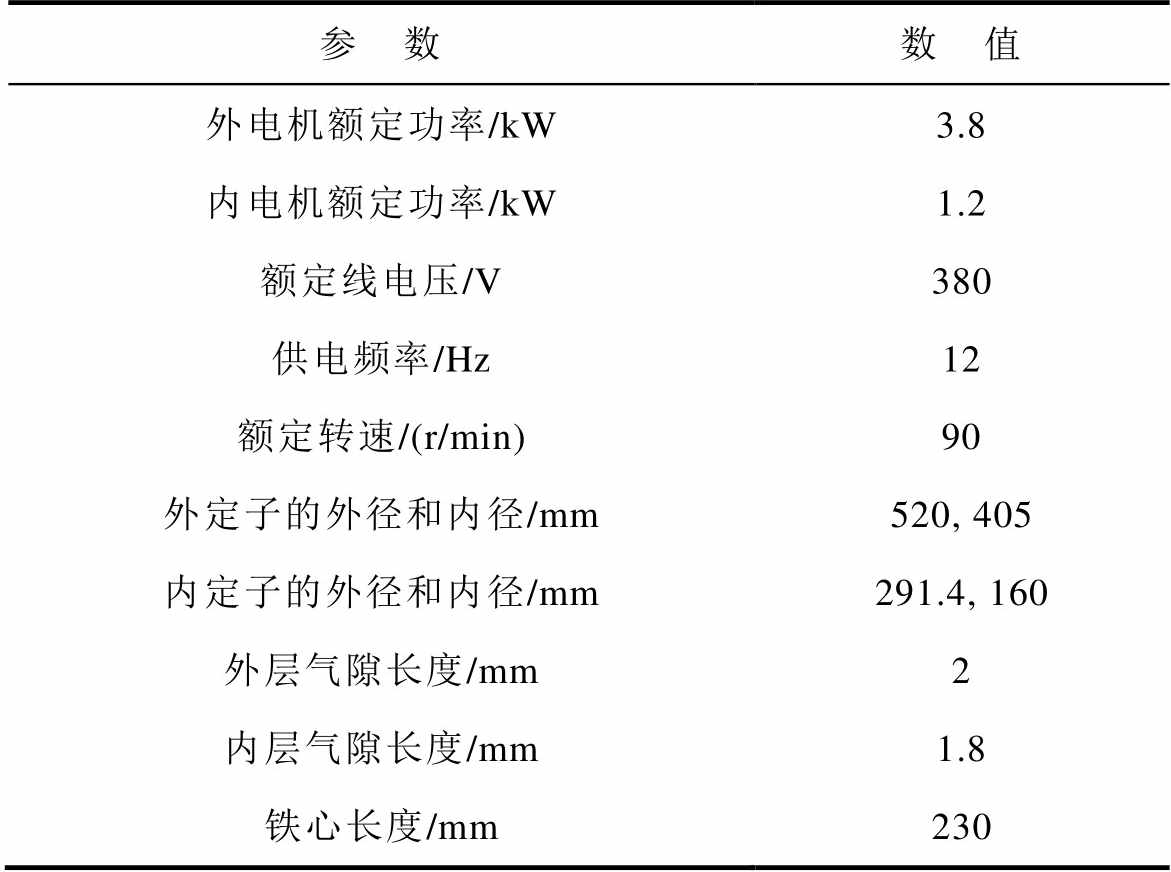
参 数数 值 外电机额定功率/kW3.8 内电机额定功率/kW1.2 额定线电压/V380 供电频率/Hz12 额定转速/(r/min)90 外定子的外径和内径/mm520, 405 内定子的外径和内径/mm291.4, 160 外层气隙长度/mm2 内层气隙长度/mm1.8 铁心长度/mm230
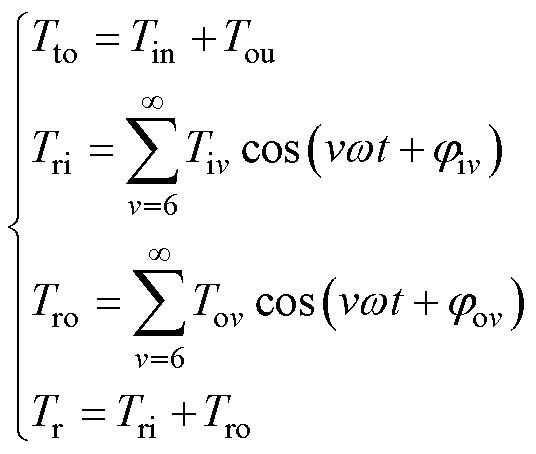 (4)
(4)
式中,Tto为DLHPMDM的总输出转矩;Tin和Tou分别为内电机和外电机的输出转矩;Tr为DLHPMDM的转矩脉动;Tri和Tro分别为内、外电机的转矩脉动;ν为谐波次数;Tiν和Toν分别为内电机和外电机的转矩脉动ν次谐波的幅值;jiν和joν分别为内、外电机的转矩脉动ν次谐波的相位。根据式(4),对于相同阶次的转矩脉动,内、外电机转矩脉动的叠加效果取决于相位jiν和joν之间的差值。当内、外电机转矩脉动的ν次谐波相位近似相同时,叠加后DLHPMDM的ν次转矩脉动的幅值近似等于Tiν和Toν之和。而当内、外电机转矩脉动的ν次谐波相位近似相反时,叠加后DLHPMDM的ν次转矩脉动的幅值近似等于Tiν和Toν之差。依据这一特点,如果使内、外电机转矩脉动的相位差接近于p,则内、外电机的转矩脉动可以实现“削峰填谷”的叠加削减效果,从而降低了DLHPMDM总的转矩脉动。
内电机和外电机的齿槽转矩都呈现周期性变化,内电机和外电机的齿槽转矩如图2所示,图中Tco为齿槽转矩的峰-峰值。为了更清晰地展示齿槽转矩的波形,图2中仅绘制了1/9电周期内的波形,即转子旋转了5°机械角度。结果表明,方案A和方案B的内电机在一个电周期内齿槽转矩的周期数是18;外电机和方案C的内电机在一个电周期内齿槽转矩的周期数是54。并且,随着齿槽转矩周期数的增多,外电机和方案C的内电机的齿槽转矩被明显削弱。此外,由图2可得内电机和外电机的齿槽转矩均被削弱到较低水平,因此不需要采用斜极、磁极偏移和优化永磁体形状等其他方法进一步降低齿槽转矩。
双定子永磁电机的内电机和外电机的齿槽转矩同样满足叠加原理,即总齿槽转矩为内电机和外电机齿槽转矩的叠加。当内电机和外电机齿槽转矩的周期数一致时,可以通过调整内电机和外电机之间的相对位置改变齿槽转矩的相位,进而使得内、外电机的齿槽转矩实现叠加削弱的效果。方案C内、外电机的齿槽转矩周期数相同,满足齿槽转矩叠加相削的使用条件。然而,根据图2中给出的数据,其内、外电机的齿槽转矩均已被削弱至较低水平(小于额定输出转矩的0.5%),即使实现最理想的叠加相削效果,DLHPMDM的转矩脉动仅降低0.11%,影响可以忽略,因此本文中不对齿槽转矩的叠加削弱作用进行详细研究分析。
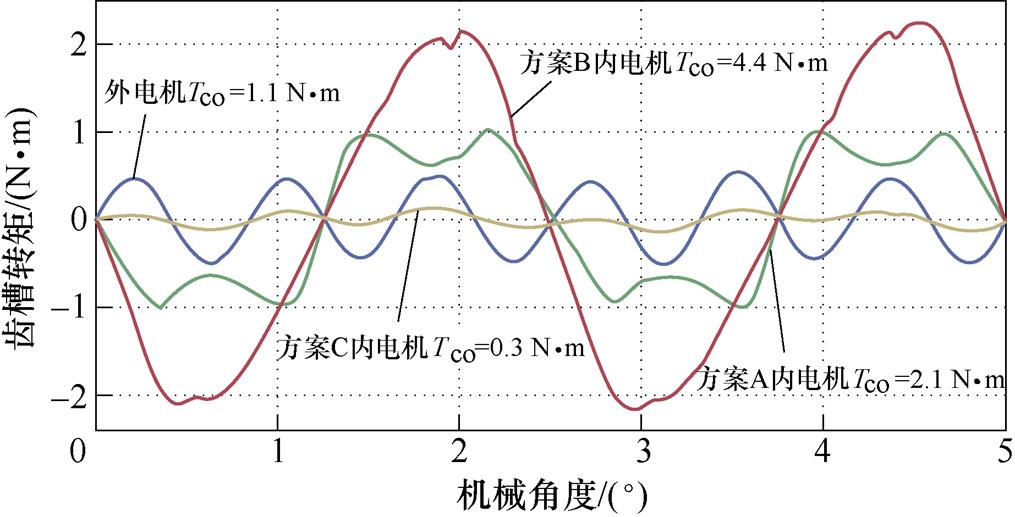
图2 内电机和外电机的齿槽转矩
Fig.2 The cogging torque of the inner and outer machines
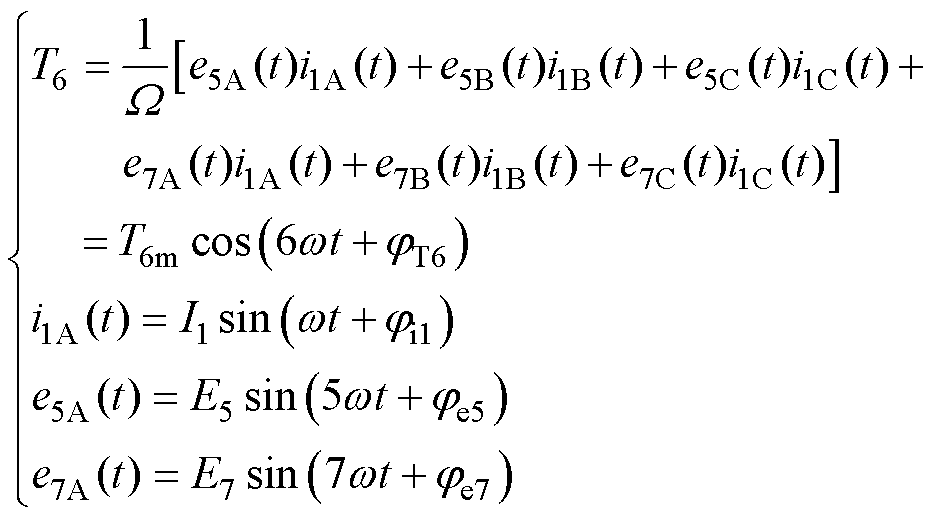
一般而言,永磁电机的纹波转矩中6倍频分量所占比重最大。仅考虑定子通入基波正弦电流的情况时,6倍频纹波转矩T6由反电动势的5次、7次谐波与基波电流相互作用产生,即
 (5)
(5)
式中,W 为机械角速度;w 为基波角频率;e5A(t)、e5B(t)、e5C(t)分别为A、B、C三相反电动势的5次谐波;e7A(t)、e7B(t)、e7C(t)分别为A、B、C三相反电动势的7次谐波;i1A(t)、i1B(t)、i1C(t)分别为A、B、C三相的基波电流;T6m为纹波转矩6次谐波的幅值;jT6为纹波转矩6次谐波的相位;I1为A相定子电流的基波幅值;ji1为A相定子电流的基波相位;E5和E7分别为A相反电动势5次和7次谐波的幅值;je5和je7分别为A相反电动势5次和7次谐波的相位。其中,反电动势的5次谐波和基波电流相互作用产生的6倍频纹波转矩分量可以表示为
 (6)
(6)
反电动势的7次谐波和基波电流相互作用产生的6倍频纹波转矩分量可以表示为
 (7)
(7)
本文中内、外电机的A相绕组轴线被设计为相互重合,并且内、外电机均以id=0控制逻辑运行,因此内、外定子电流的基波相位近似相同。在此前提下,内、外电机6倍频纹波转矩的叠加效果取决于反电动势谐波的相位差。
根据上述分析得到一种降低DLHPMDM转矩脉动的设计方法:在将DLHPMDM分为两个独立的电机分别进行设计时,不能仅关注绕组形式等参数对单一电机转矩脉动的影响,还应当考虑内、外电机转矩脉动之间的叠加作用。通过计算分析内、外电机反电动势谐波的相位关系可以预测转矩脉动的叠加效果,进而选择合适的绕组形式和参数利用叠加削减作用降低DLHPMDM总的转矩脉动。
DLHPMDM的内、外电机反电动势的相位差列于表3中。根据表中数据,方案B和方案C内、外电机反电动势的谐波近似为同相位,可以推测方案B和方案C的内、外电机的6倍频纹波转矩也近似同相位,叠加后呈现总转矩脉动增大的效果。而方案A的内、外电机反电动势的5次谐波近似相位相反,可推测其内、外电机的6倍频纹波转矩近似相位相反,叠加后呈现总转矩脉动降低的效果(尽管方案A的内、外电机反电动势的7次谐波相位近似相同,但经过计算,其7次谐波的幅值较低,对6倍频纹波转矩的影响可以忽略)。
表3 内电机和外电机反电动势的相位差
Tab.3 The phase difference of back EMFs between the inner and outer machines (单位: rad)
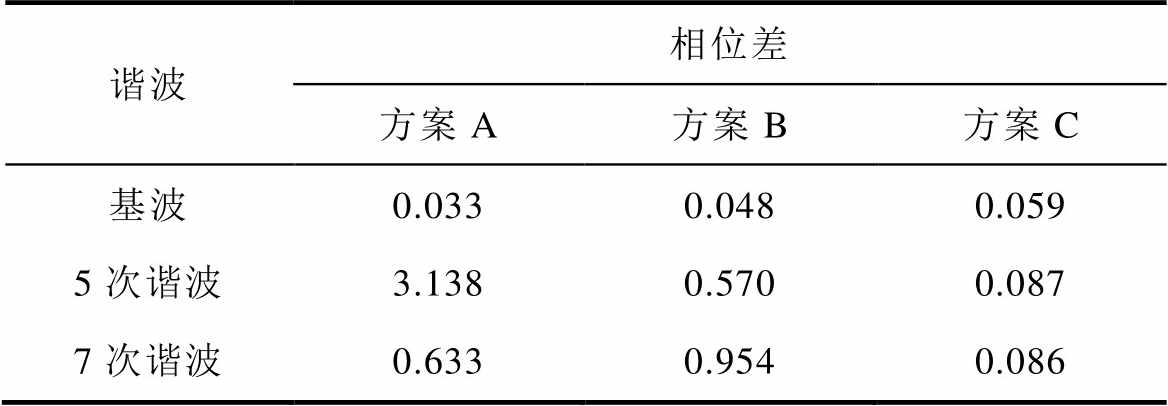
谐波相位差 方案A方案B方案C 基波0.0330.0480.059 5次谐波3.1380.5700.087 7次谐波0.6330.9540.086
根据式(5)~式(7)计算DLHPMDM的6倍频纹波转矩,结果如图3所示。由图3可得,对于方案A而言,其内、外电机的6倍频纹波转矩近似反相,使得DLHPMDM总的6倍频纹波转矩被叠加削弱。而方案B和方案C的内、外电机的6倍频纹波转矩近似同相,总的6倍频纹波转矩因直接叠加而增大,所得结果与前述的分析推测相符。DLHPMDM的内、外电机的绕组形式配合可以初步选定为方案A。
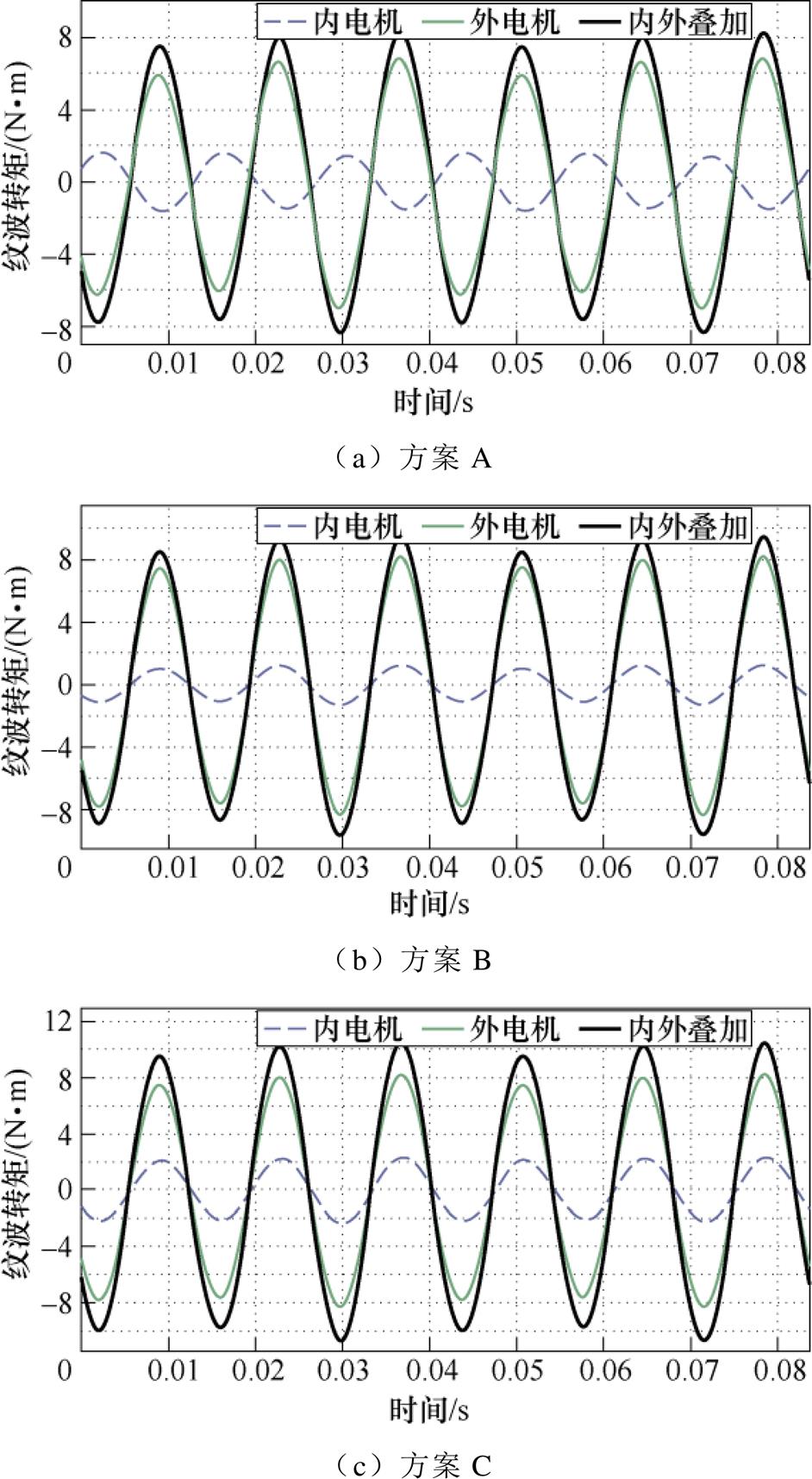
图3 DLHPMDM的6倍频纹波转矩
Fig.3 The 6th ripple torque of the DLHPMDM
对不同方案的DLHPMDM进行有限元分析,电机在额定负载下的输出转矩波形如图4所示,输出转矩的主要相关数据列于表4中。引入转矩脉动系数Rtr以评价电机转矩脉动的大小,转矩脉动系数的定义为
 (8)
(8)
式中,Tmax为输出转矩的最大值;Tmin为输出转矩的最小值;Tavg为输出转矩的平均值;Tp-p为输出转矩的峰-峰值。由图4a~图4c可得,对外电机和方案C的内电机而言,6倍频纹波转矩显然在转矩脉动的各阶次谐波中占主导地位。而方案A和B的内电机转矩脉动的谐波构成较为复杂。为进一步研究转矩谐波,对电机的输出转矩进行快速傅里叶分解,结果如图4d~图4f所示。
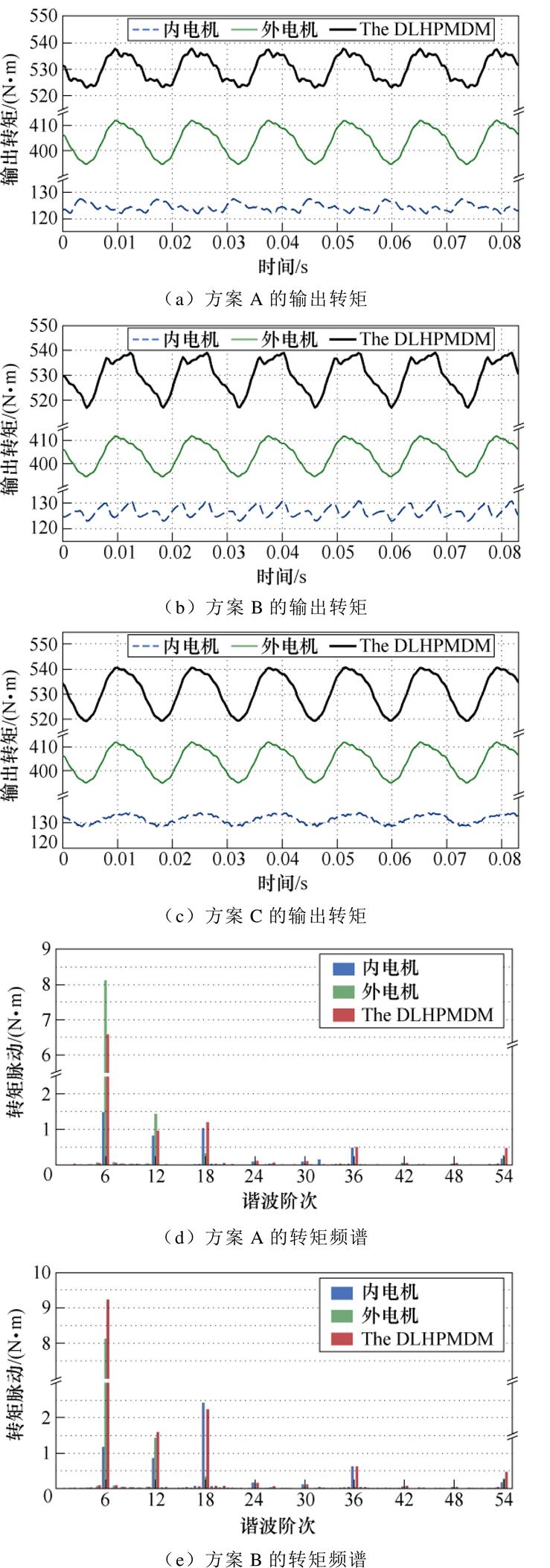
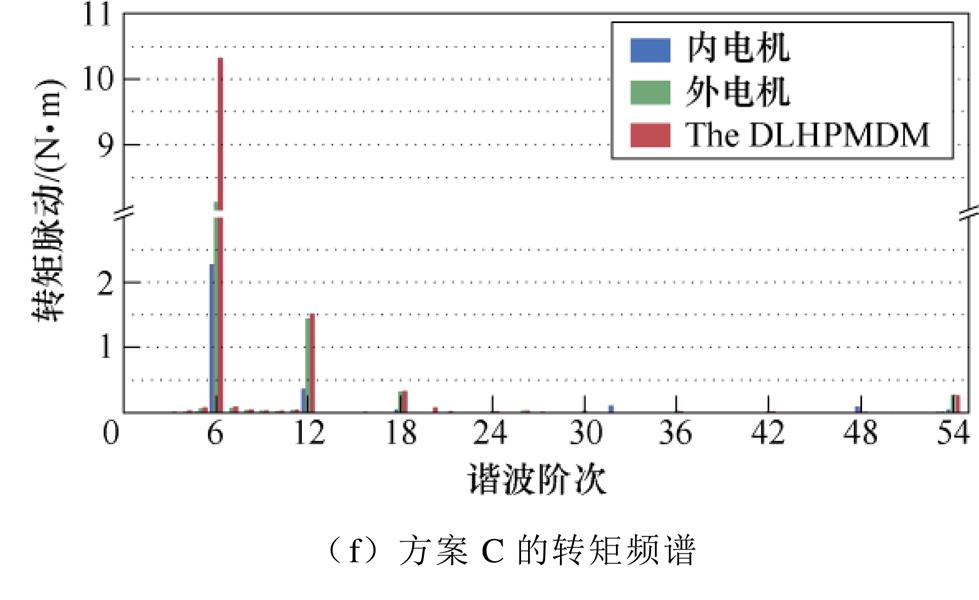
图4 DLHPMDM的转矩
Fig.4 Torque of the DLHPMDM
根据表4中数据,方案A的转矩脉动最低,其总转矩峰-峰值低于外电机的转矩峰-峰值。由图4d可得,方案A转矩脉动的6次谐波的幅值近似等于内、外电机转矩脉动的6次谐波幅值之差。由于内、外电机纹波转矩的叠加削减作用,有效降低了方案A的总输出转矩中纹波转矩。而方案C内电机转矩峰-峰值尽管最低,其总的转矩脉动却高于方案A。由图4f可得,方案C转矩脉动的6次谐波的幅值近似等于内、外电机转矩脉动的6次谐波幅值之和。内、外电机6倍频纹波转矩的直接叠加导致总输出转矩中6倍频纹波转矩增大。同样地,方案B转矩脉动的6次谐波的幅值近似等于内、外电机转矩脉动的6次谐波幅值直接叠加,使得电机总转矩脉动的值较大。
表4 DLHPMDM输出转矩的主要数据
Tab.4 Main data of output torque waveforms
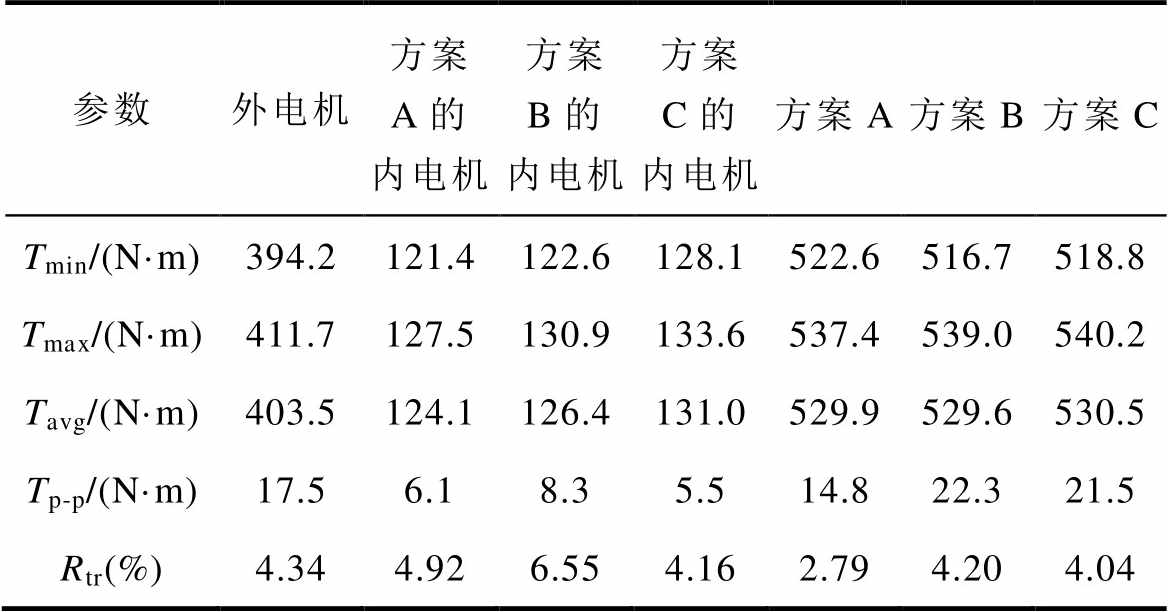
参数外电机方案 A的内电机方案 B的内电机方案 C的内电机方案A方案B方案C Tmin/(N·m)394.2121.4122.6128.1522.6516.7518.8 Tmax/(N·m)411.7127.5130.9133.6537.4539.0540.2 Tavg/(N·m)403.5124.1126.4131.0529.9529.6530.5 Tp-p/(N·m)17.56.18.35.514.822.321.5 Rtr(%)4.344.926.554.162.794.204.04
此外,方案A和方案B的内电机转矩脉动的18次谐波需要被特别注意,其主要由内电机的齿槽转矩构成,而非纹波转矩。根据2.2节中的分析,方案A和方案B的内电机在一个电周期内齿槽转矩的周期数为18,即齿槽转矩的频率为电机额定频率的18倍。将方案A和方案B内电机转矩脉动的18次谐波的幅值和图2中齿槽转矩的幅值进行对比,数值上吻合较好,验证了该分析。
通过对比不同方案DLHPMDM的转矩性能,初步验证了所提的降低DLHPMDM转矩脉动的设计方法。此外,以方案A为例,内电机的6倍频纹波转矩的幅值在一定范围内增大,则内、外电机纹波转矩的叠加削减效果更明显。因此,在内电机的设计过程中,为进一步降低DLHPMDM的转矩脉动,还可以探究如何提高内电机的纹波转矩。对于DLHPMDM的齿槽转矩而言,当内、外电机齿槽转矩周期数相同时,可以考虑叠加作用的影响。当内、外电机齿槽转矩周期数不同时,应通过优化设计分别削弱内、外电机的齿槽转矩以降低总的齿槽转矩。
在永磁电机的有限元分析中通常采用电流源作为激励。第2节忽略了谐波电流对电机转矩脉动的影响,基于常规的采用电流源激励的有限元仿真简化了对DLHPMDM转矩脉动的分析。考虑谐波电流的影响时[16],永磁电机的6倍频纹波转矩可以表示为
 (9)
(9)
式中,E1、E11和E13分别为A相反电动势基波、11次谐波和13次谐波的幅值;I5和I7分别为A相定子电流5次和7次谐波的幅值。永磁电机的有限元分析中,采用三相正弦电流激励时无法考虑绕组谐波引起的谐波电流的影响。因此,根据式(9),第2节仿真所得的转矩脉动低于实际值。与之相比,有限元分析中采用电压源激励能够实现对绕组谐波的分析,使得转矩脉动的仿真结果更加准确。此外,在实际应用中DLHPMDM需要搭配电压型逆变器使用,并且内、外两套绕组并联接在同一台逆变器。采用电压源激励的有限元仿真能够更加真实地反映DLHPMDM的实际运行情况。本节将基于一种以电压源为激励的有限元分析法[17],对DLHPMDM的内、外电机转矩脉动的叠加作用进行验证分析。首先以方案A为例,将电压源激励下DLHPMDM的输出转矩的结果与采用电流源激励时的仿真结果进行对比,转矩波形如图5所示,相关数据列于表5中。根据表中数据,当激励由电流源改为电压源后,DLHPMDM的转矩脉动显著增大,这是由谐波电流导致的。
采用电压源激励时定子电流频谱如图6所示。从图6中可以看出,采用电压源激励时定子电流中5次谐波的幅值较高。根据式(9),5次谐波电流可以和基波电动势作用产生6倍频转矩脉动。结合定子电流的仿真结果,DLHPMDM总定子电流中的5次谐波的幅值近似等于内、外电机5次谐波电流幅值之差,因为内、外电机5次谐波电流近似反相。如前文所述,作为内、外绕组并联的前提条件,内、外电机反电动势的基波相位被调整为近似相同。依据第2节的理论分析可以推测,内、外电机5次谐波电流和基波电动势作用产生的6倍频纹波转矩也满足叠加削减的相位条件。
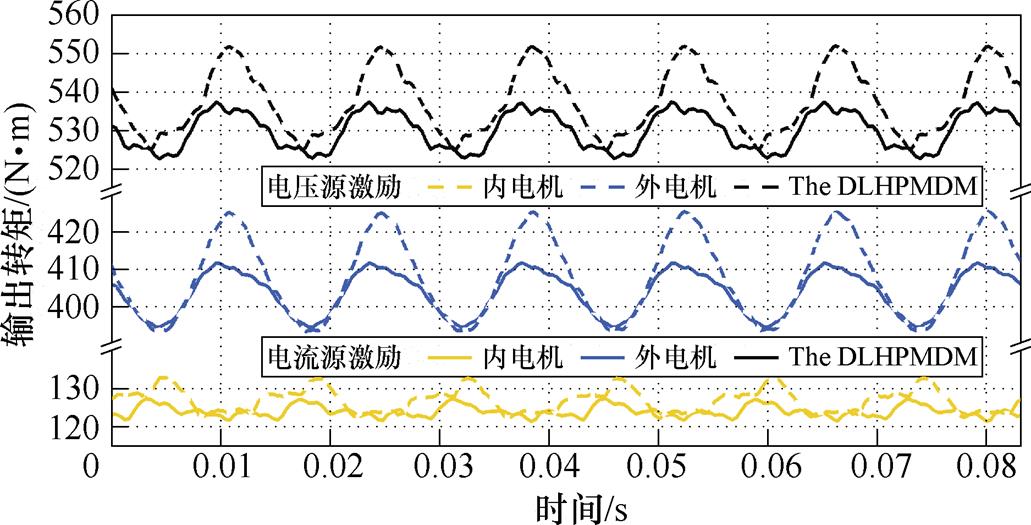
图5 采用不同激励时DLHPMDM的输出转矩
Fig.5 Torque of DLHPMDM with different excitations
表5 采用不同激励时输出转矩性能对比
Tab.5 Torque comparison with different excitations
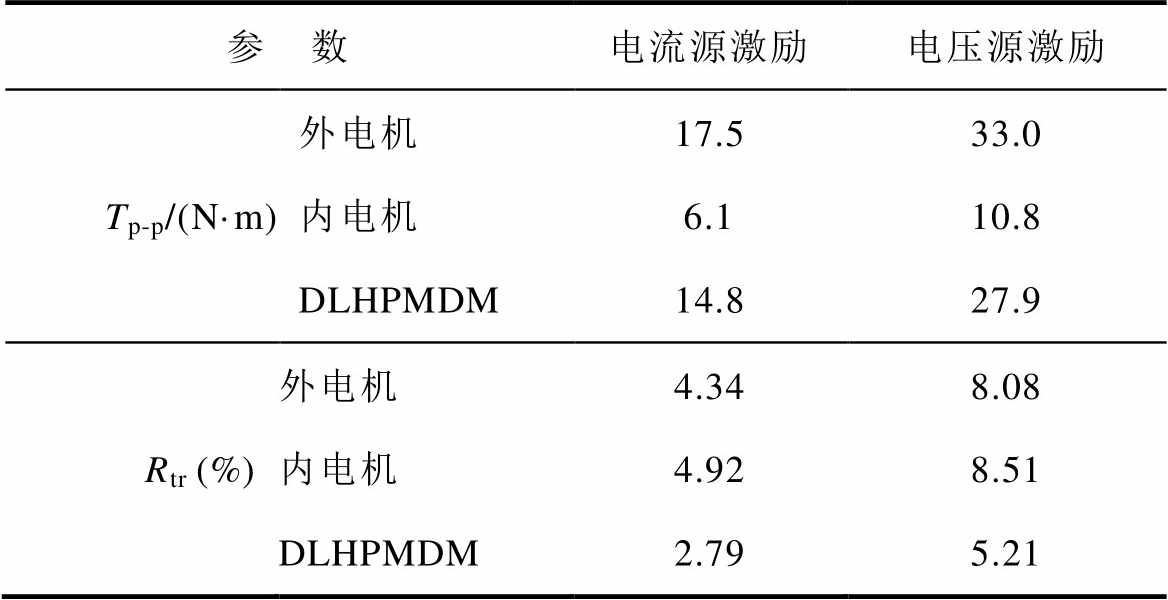
参 数电流源激励电压源激励 外电机17.533.0 Tp-p/(N·m)内电机6.110.8 DLHPMDM14.827.9 外电机4.348.08 Rtr (%) 内电机4.928.51 DLHPMDM2.795.21
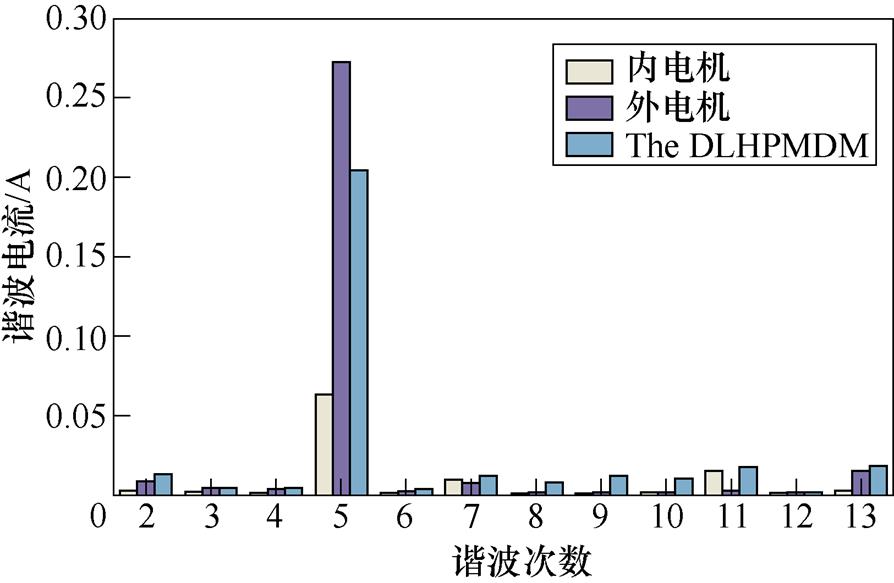
图6 采用电压源激励时定子电流频谱
Fig.6 The spectra of currents with voltage excitations
对采用不同激励源时DLHPMDM的输出转矩进行快速傅里叶分解,结果如图7所示。从图中可以看出,由于考虑了谐波电流的影响,采用电压源激励进行仿真时,内、外电机的6倍频转矩脉动都显著增加。DLHPMDM总的输出转矩中6倍频转矩脉动的幅值为11.87 N·m,近似等于内、外电机6倍频转矩脉动的幅值之差。结果表明,在内、外电机的基波电流相位一致且反电动势基波的相位也近似相同的前提下,采用电压源激励时,方案A仍满足2.1节分析的6倍频纹波转矩叠加削减的效果。
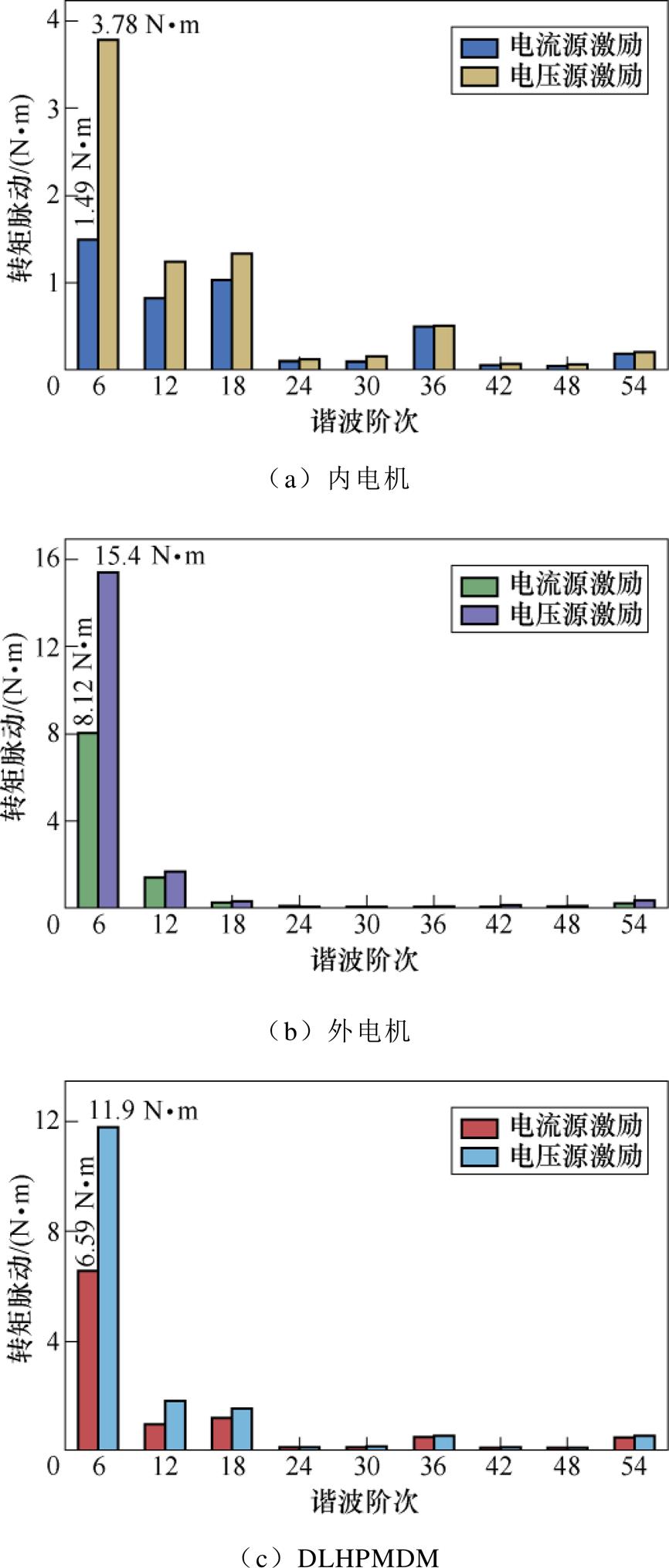
图7 采用不同激励时DLHPMDM输出转矩的频谱
Fig.7 The spectra of output torque of the DLHPMDM with different excitations
同样以电压源为激励对方案B和方案C的转矩性能进行有限元分析,输出转矩的波形如图8所示,相关数据列于表6中。由于考虑了绕组谐波的影响,采用电压源激励时两个方案内、外电机的转矩脉动相比于采用电流源激励时均显著增大。此外,通过对比表6中数据和方案A的仿真结果,考虑到谐波电流对转矩脉动的影响时,方案A内、外电机6倍频纹波转矩的叠加削减作用对总转矩脉动的抑制效果更加明显。相比于方案C,方案A的总转矩脉动水平由8.84%降低至5.21%。
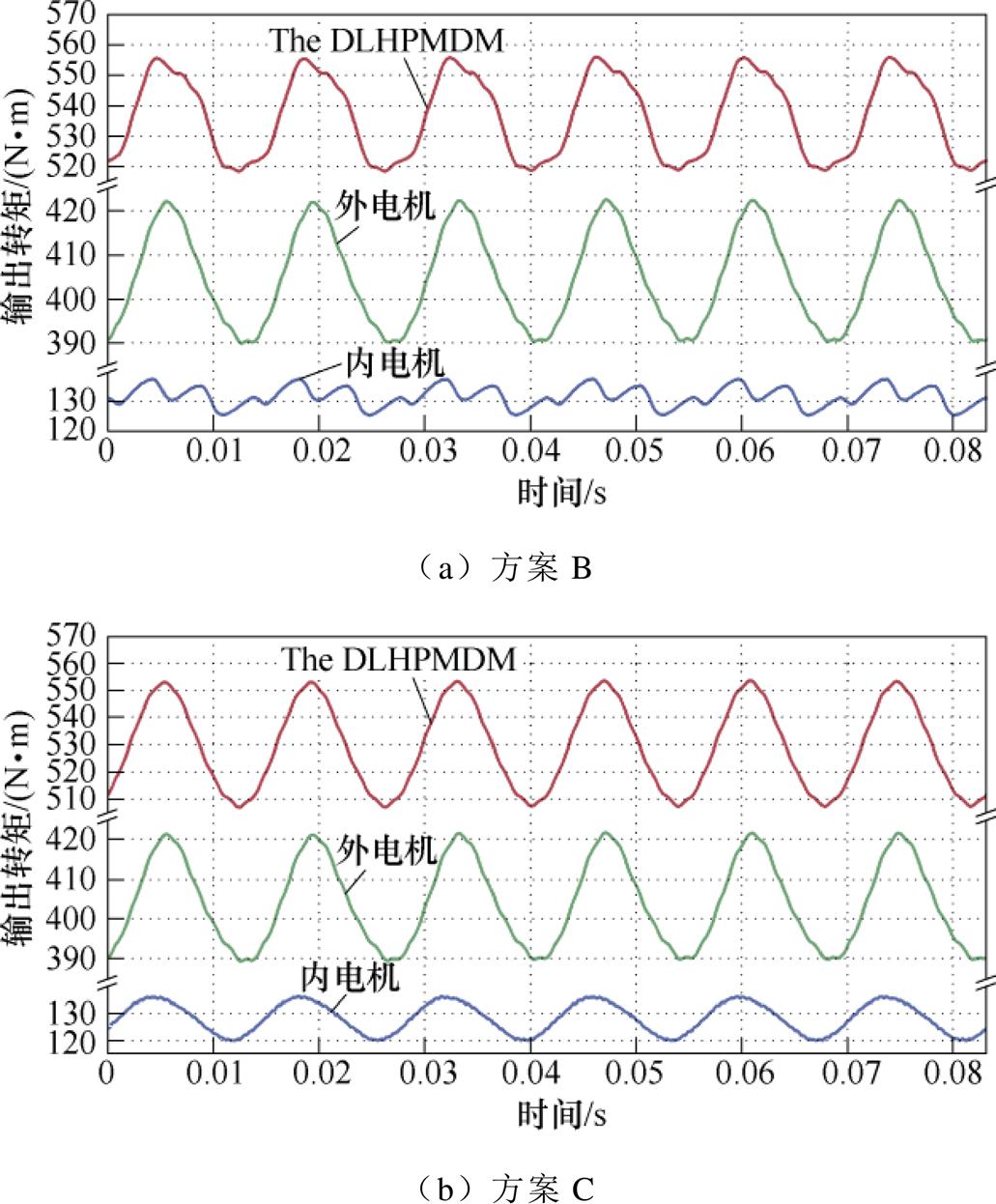
图8 采用电压源激励时方案B和方案C的输出转矩
Fig.8 The output torque of Project B and Project C with voltage excitations
表6 采用电压源激励时方案B和方案C的转矩性能
Tab.6 Torque performances of project B and project C with voltage excitations
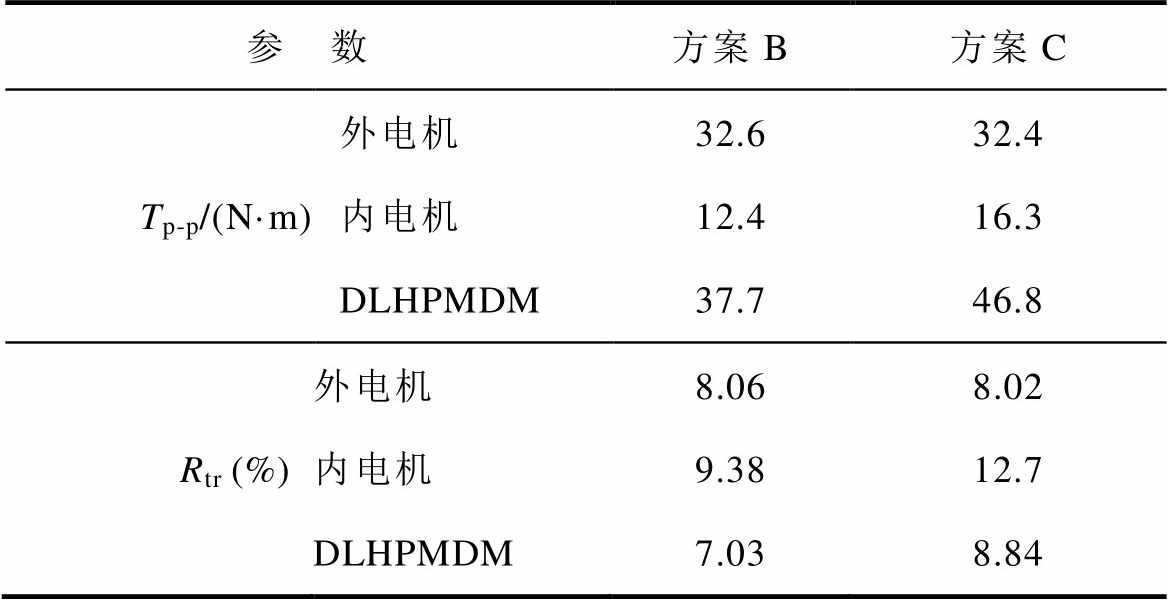
参 数方案B方案C 外电机32.632.4 Tp-p/(N·m)内电机12.416.3 DLHPMDM37.746.8 外电机8.068.02 Rtr (%) 内电机9.3812.7 DLHPMDM7.038.84
通过第2节有限元分析的验证,采用方案A时DLHPMDM的转矩脉动水平最低。最终,依据方案A生产了一台DLHPMDM样机并进行相关实验验证。样机及其实验平台如图9所示,其中用一台调速感应电机(工作在发电状态)和一台齿轮减速机配合提供低速大转矩负载。实验平台还包括各种传感器和探头用于测量样机的电磁性能。转矩/转速传感器选用了HBM公司的T10F,其具有较高的测试精度。
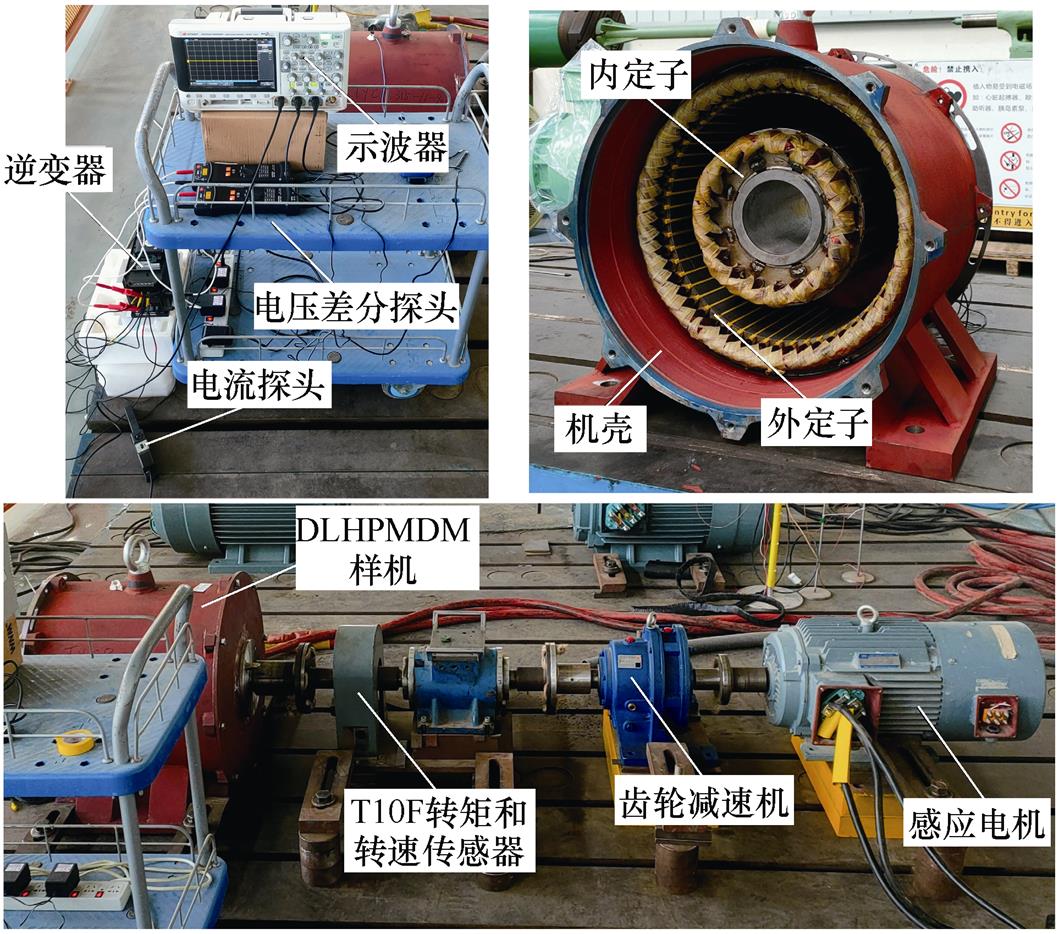
图9 DLHPMDM样机及其实验平台
Fig.9 The test platform of the DLHPMDM prototype
根据1.2节中分析,实现内、外绕组的并联要求内、外电机的反电动势在幅值和相位方面都应近似相等。为满足该条件,在DLHPMDM的装配过程中需要调整内、外定子之间的相对位置,以保证内、外电机的反电动势相位近似一致。在内、外定子压装进机壳时,需要使内、外定子轴向位置保持一致,以确保内、外电机的反电动势幅值近似相同。首先在额定转速下测量内、外电机的空载反电动势。空载反电动势的实验结果如图10所示,反电动势的实测值和仿真结果吻合较好。并且内、外电机的反电动势实测波形几乎重合,表明具有近似的幅值(内、外电机反电动势的基波幅值分别为313.5 V和309.1 V)和相位(相位差为0.018 rad)。实验结果验证了样机的设计和生产具有较高精度。
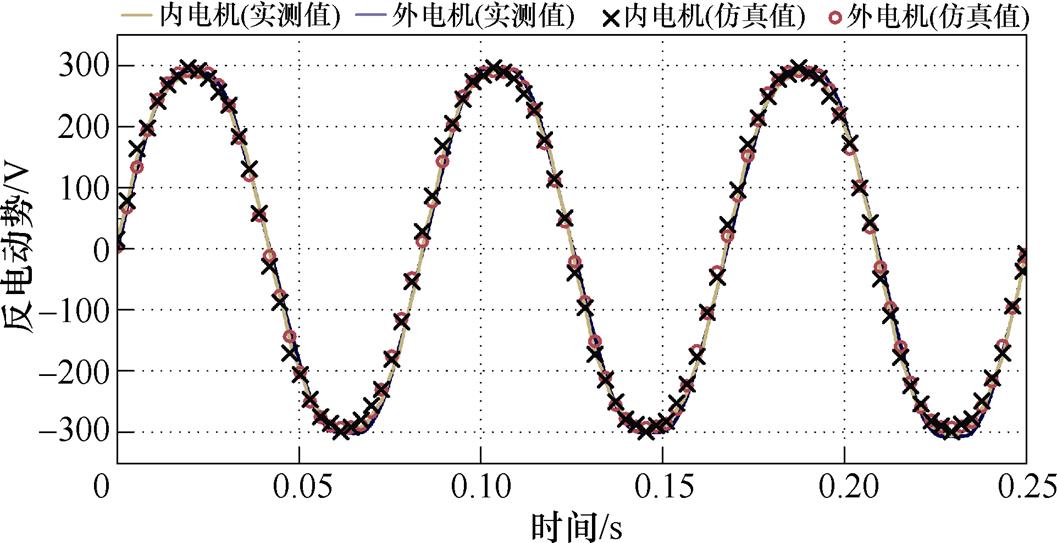
图10 空载反电动势的实验结果
Fig.10 Experimental results of back EMFs at no load
将DLHPMDM的内、外两套绕组并联连接在一台逆变器上进行样机负载实验,测得额定负载下的定子相电流如图11所示。对比实测结果和采用电压源激励时的仿真结果相差很小,验证了以电压源为激励的有限元分析的准确性。对实测电流数据作后处理,得到内、外电机定子相电流的有效值分别为2.15 A和6.38 A。内、外电机定子相电流的基波相位差仅有0.02 rad。根据实验结果,DLHPMDM样机的内、外电机6倍频纹波转矩叠加削减所需的反电动势和定子电流的相位条件均满足。
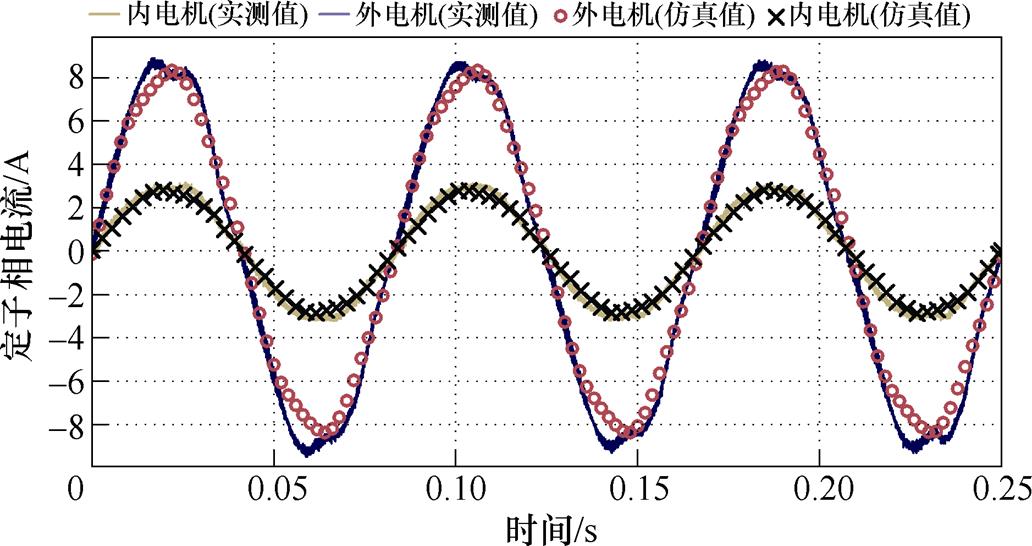
图11 额定负载时定子相电流的实验结果
Fig.11 Experimental results of currents at the nominal load
采用以磁粉制动器为负载的消耗法实验测试电机的转矩脉动,结果较为准确。然而,样机的额定输出转矩达到530 N·m,实验所需的大规格磁粉制动器难以获得。受限于实验条件,改用调速感应电机和减速机配套作为负载,采用对拖法进行样机的负载实验。在对拖法实验中,作为陪试电机的感应电机的转矩脉动可能对转矩测试的精度产生干扰。此外,负载大小的调节是通过改变感应电机频率实现的,实验过程中感应电机供电频率的微小变化可能导致负载的轻微波动,使电机的输出转矩产生波动,进而影响了测试精度。
尽管受实验条件影响,可能导致测得的转矩脉动高于实际值。实测转矩的结果如图12所示。图12中DLHPMDM的转矩脉动在可接受的水平。在图12所示的3个电周期的时间范围内,根据理论分析6倍频转矩脉动应该出现18个波峰。图中每个小波峰范围内,转矩脉动的峰-峰值约为30 N·m,与采用电压源激励时有限元仿真的结果近似。并且,实测的输出转矩的波形整体上与仿真得到的转矩波形相接近,这表明了本文对DLHPMDM转矩分析的准确性。
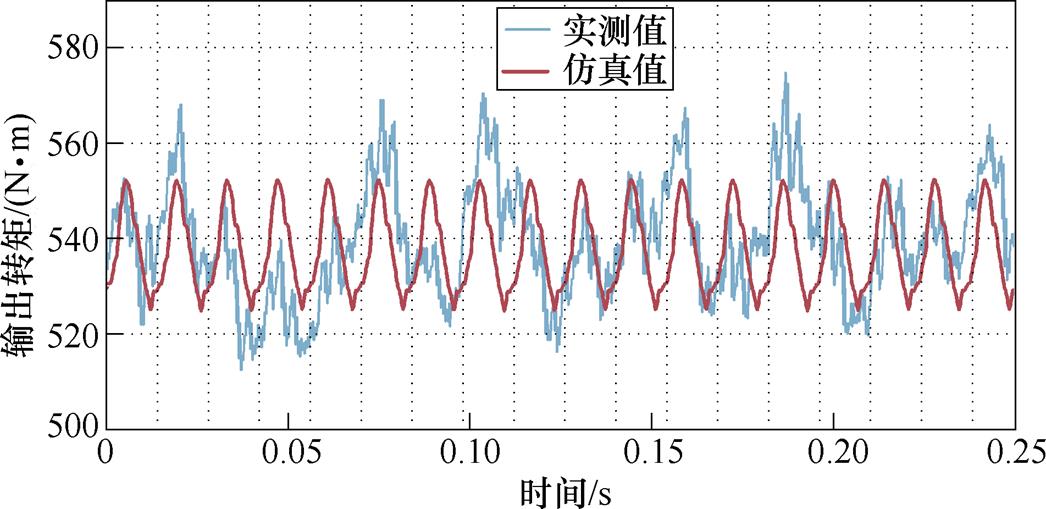
图12 DLHPMDM输出转矩的实验结果
Fig.12 Experimental results of output torque of the DLHPMDM
本文以三台5 kW 90 r/min的DLHPMDM为研究模型,基于双定子电机的转矩叠加原理探究了绕组形式对电机转矩性能的影响,提出一种抑制DLHPMDM转矩脉动的设计方法,即双定子电机分为内、外电机做初步设计时,通过分析内、外电机反电动势的谐波相位差预测内、外电机纹波转矩的叠加效果,然后选择合适的内、外电机绕组形式的组合实现电机转矩脉动的降低。
采用解析法和有限元法分析三个方案的转矩性能得出,利用内、外电机纹波转矩的叠加削减作用能够有效降低输出转矩的脉动水平。考虑到谐波电流对转矩脉动的影响时,该设计思路同样适用。通过选用合适的内、外电机绕组形式组合,DLHPMDM的转矩脉动由8.84%降低至5.21%。试制DLHPMDM样机进行相关实验,实验结果和仿真结果吻合得较好,验证了上述分析的有效性。本文描述的方法为双定子电机的低转矩脉动设计提供了思路。
参考文献
[1] 黄海林, 李大伟, 曲荣海, 等. 磁齿轮复合永磁电机拓扑及应用综述[J]. 电工技术学报, 2022, 37(6): 1381-1397.
Huang Hailin, Li Dawei, Qu Ronghai, et al. A review of magnetic geared machines: topologies and appli- cations[J]. Transactions of China Electrotechnical Society, 2022, 37(6): 1381-1397.
[2] 陶大军, 陈阳, 李凌霄, 等. MW级双并列转子低速永磁直驱电机设计方法与性能分析[J]. 电机与控制学报, 2023, 27(9): 82-90.
Tao Dajun, Chen Yang, Li Lingxiao, et al. Design method and performance analysis of MW-level dual- parallel rotor low-speed permanent magnet direct- driven motor[J]. Electric Machines and Control, 2023, 27(9): 82-90.
[3] 姚钢, 杨浩猛, 周荔丹, 等. 大容量海上风电机组发展现状及关键技术[J]. 电力系统自动化, 2021, 45(21): 33-47.
Yao Gang, Yang Haomeng, Zhou Lidan, et al. Deve- lopment status and key technologies of large-capacity offshore wind turbines[J]. Automation of Electric Power Systems, 2021, 45(21): 33-47.
[4] Zhao F, Lipo T A, Kwon B. A novel dual-stator axial-flux spoke-type permanent magnet vernier machine for direct-drive applications[J]. IEEE Transactions on Magnetics, 2014, 50(11): 1-4.
[5] 鲍晓华, 朱然, 刘佶炜, 等. 基于相位分析的双定子低速大转矩永磁同步电动机转矩脉动研究[J]. 电工技术学报, 2022, 37(22): 5660-5669.
Bao Xiaohua, Zhu Ran, Liu Jiwei, et al. Torque Ripple analysis of dual-stator surface mounted low- speed high-torque permanent magnet synchronous motors based on phase analysis[J]. Transactions of China Electrotechnical Society, 2022, 37(22): 5660- 5669.
[6] Zhang Jiaxu, Zhang Bingyi, Feng Guihong, et al. Design and analysis of a low-speed and high-torque dual-stator permanent magnet motor with inner enhanced torque[J]. IEEE Access, 2020, 8
[7] Liu Jiwei, Bao Xiaohua, Ni Youyuan, et al. A Novel semi-inserted dual-stator low-speed high-torque per- manent magnet drive motor[J]. Journal of Magnetics, 2018, 23(4): 1-6.
[8] Niu Shuangxia, Ho S L, Fu W N. A Novel direct-drive dual-structure permanent magnet machine[J]. IEEE Transactions on Magnetics, 2010, 46(6): 2036- 2039.
[9] Wang Chen, Zhang Zhuoran, Liu Ye, et al. Effect of slot-pole combination on the electromagnetic performance of ironless stator AFPM machine with concentrated windings[J]. IEEE Transactions on Energy Con- version, 2020, 35(2): 1098-1109.
[10] Ahsanullah K, Dutta R, Rahman M. Analysis of low-speed IPMMs with distributed and fractional slot concentrated windings for wind energy appli- cations[J]. IEEE Transactions on Magnetics, 2017, 53(11): 1-10.
[11] Zhang Zhaoyu, Yu Siyang, Zhang Fengge, et al. Electromagnetic and structural design of a novel low-speed high-torque motor with dual-stator and pm-reluctance rotor[J]. IEEE Transactions on Applied Superconductivity, 2020, 30(4): 1-5.
[12] 王玉彬, 程明, 花为, 等. 双定子永磁无刷电机裂比的分析与优化[J]. 中国电机工程学报, 2010, 30(30): 62-67.
Wang Yubin, Cheng Ming, Hua Wei, et al. Analysis and optimization of split ratio for double-stator permanent magnet brushless machine[J]. Proceedings of the CSEE, 2010, 30(30): 62-67.
[13] Zhang Jiaxu, Zhang Bingyi, Li Dongming, et al. Research on Cogging torque weakening of direct- drive permanent magnetmotor with inner enhance force[J]. IEEJ Transactions on Electrical and Electronic Engineering, 2022, 17: 160-168.
[14] Verez G, Barakat G, Amara Y, et al. Impact of pole and slot combination on vibrations and noise of electromagnetic origins in permanent magnet syn- chronous motors[J]. IEEE Transactions on Magnetics, 2015, 53(4): 1-4.
[15] Meng Ying, Lu Kaiyuan, Wu Lijian, et al. Reduction methods using canceling effect for cogging torque in dual-stator PM synchronous machines[C]//IEEE Inter- national Electric Machines & Drives Conference, San Diego, CA, USA, 2019, DOI: 101109/IEMDC.2019. 8785112.
[16] 鲍晓华, 吴长江, 胡云鹏, 等. 一种优化表插式永磁电机性能的方法[J]. 电工技术学报, 2018, 33(2): 238-244.
Bao Xiaohua, Wu Changjiang, Hu Yunpeng, et al. A method for optimizing performance of inset per- manent magnet motor[J]. Transactions of China Electrotechnical Society, 2018, 33(2): 238-244.
[17] Liu Jiwei, Di Chong, Li Shihao, et al. Modeling and design of a dual-stator low-speed high-torque permanent magnet drive machine for the ball mill application[J]. IEEJ Transactions on Electrical and Electronic Engineering, 2023, 18(7): 1195-1207.
Abstract By incorporating the merits of the high torque density, high efficiency, and compact size, the dual-stator low-speed high-torque permanent magnet drive machine (DLHPMDM) is an excellent alternative to the traditional machine in low-speed high-torque applications. For dual-stator machines, the total output torque equals the output torque superposition of inner and outer machines, namely the torque superposition principle of dual-stator machines. This principle can explain the mechanism of reducing the torque ripple of the dual-stator permanent magnet machines. Changing the pole-slot number combination is a crucial method to reduce the torque ripple of machines. However, in analyzing and mitigating torque ripple for the DLHPMDM, considering the inner and outer machines alone needs to be revised and more accurate. More attention should be paid to the superposition reduction effect of inner and outer torque ripple resulting from different phases. The combination number of inner and outer stator slots can affect the torque ripple of the DLHPMDM.
Based on the torque superposition principle of dual-stator machines, a design method is proposed to reduce the torque ripple of the DLHPMDM with the inner and outer windings connected in parallel. Generally, the 6th ripple torque accounts for the largest proportion of the torque ripple of permanent magnet machines. Suppose the phase difference between the 6th ripple torque of the inner and outer machines is close to p. In that case, the superposition reduction effect can be achieved, thereby reducing the total torque ripple of the DLHPMDM. When only considering the situation where the fundamental sinusoidal current is passed through the stator windings, the 6th ripple torque is caused by the following two cases. One is the interaction of the fundamental current and the 5th harmonic of the back EMF. The other is the interaction of the fundamental current and the 7th harmonic of the back EMF. The fundamental phases of the inner and outer stator currents are approximately the same. Therefore, when the DLHPMDM is divided into two independent machines for design, the superposition effect of 6th ripple torque of the inner and outer machines can be predicted by the phase relationship of the back-EMFs harmonics. Then, the appropriate winding form combination is determined to reduce the total torque ripple of the DLHPMDM by utilizing the superposition reduction effect.
Based on three projects of DLHPMDM with different winding forms installed on the inner stator, the influence of the harmonic phase difference of back EMFs of inner and outer machines on the superposition of the ripple torque is analyzed. By comparing torque performance, the winding form combination of the inner and outer stators is initially selected. Then, considering the influence of harmonic currents from winding harmonics, the torque ripple of DLHPMDM can be effectively reduced (from 8.84% to 5.21%) with a reasonable winding form combination. Finally, a prototype of the DLHPMDM is manufactured and tested. The results are well consistent with the simulated results, which verifies the feasibility of the low torque ripple design method.
keywords:Dual-stator permanent magnet drive machine, winding forms, torque superposition principle, ripple torque, torque ripple
DOI: 10.19595/j.cnki.1000-6753.tces.230548
中图分类号:TM351
国家自然科学基金资助项目(51977055)。
收稿日期 2023-04-27
改稿日期 2023-07-03
刘佶炜 男,1994年生,博士研究生,研究方向为永磁电机设计及优化。E-mail: liujiwei@mail.hfut.edu.cn
鲍晓华 男,1972年生,教授,博士生导师,研究方向为电机设计理论和技术等。E-mail: baoxh@hfut.edu.cn(通信作者)
(编辑 郭丽军)