图1 双边LCC型WPT系统结构
Fig.1 Structure of the proposed LCC-LCC topology WPT system
摘要 针对无线电能传输(WPT)系统的传输效率受耦合线圈之间的互感以及负载影响的特点,该文提出一种基于阻抗匹配技术的最大效率追踪及基于前馈PI控制的恒压输出复合控制方法。首先,对双边LCC型WPT系统的参数和传输效率进行分析,通过调整系统参数优化系统的传输效率。其次,在二次侧使用DC-DC变换器采用阻抗匹配的方法实现最大效率追踪,同时在一次侧采用DC-DC变换器利用前馈PI控制器闭环控制负载端电压实现恒压输出。该方法中,效率追踪和电压控制之间相互独立,互不干扰。此外,该方法还通过系统工作时的电路参数来估算线圈间的互感值,并通过线性拟合的方法对该估算互感值进行修正,得到更精确的互感估算值。最后,通过搭建实验平台验证了该方法的可行性和有效性。与PI控制相比,前馈PI控制方法在快速性和抗扰动性上均具有明显优势。
关键词:无线电能传输 最大效率追踪 恒压输出 前馈PI控制 互感识别
无线电能传输(Wireless Power Transfer, WPT)系统由于其与用电设备之间没有直接的电气连接,克服了传统有线充电方式在恶劣环境中的安全隐患,具有可靠性高、便携性强的优点,因此其在移动电子产品、植入式医疗设备及电动汽车等领域得到了广泛应用[1-5]。在WPT系统的工作过程中,负载的变化以及耦合机构之间的偏移通常会导致系统输出电压不稳定,且降低系统的电能传输效率[6]。为解决此问题,国内外学者对如何保持WPT系统电压稳定输出以及提高系统的运行效率进行了大量研究。
首先,在控制系统输出电压方面,为实现在系统工作条件改变情况下系统仍能保持稳定的电压输出,需要可靠的闭环控制策略[7-12]。文献[7-9]分别使用PI控制、基于遗传算法的PID控制和线性自抗扰控制(Linear Active Disturbance Rejection Con- troller, LADRC)使WPT系统进行恒压输出。文献[10-11]分别采用滑模控制和H∞ 鲁棒控制的非线性控制方法以提高WPT系统电压输出的鲁棒性。文献[12]中指出WPT系统工作在非谐振状态时具有一段恒压输出区间,此工作状态下可通过切换控制的方式控制WPT系统恒压输出。其次,在最大效率追踪方面,由于WPT系统只能在特定负载条件下实现最大效率传输[13],所以最大效率追踪的实现方法大多为阻抗匹配。阻抗匹配的方法主要有调节DC-DC变换器[14-15]、调节有源整流器的脉冲宽度[16]以及调节系统工作频率[17],此外,还可以通过调节无源器件网络实现无源阻抗匹配[18]以优化系统效率。最后,追踪系统最大效率的同时控制系统输出电压成为了当下研究的热点,为了WPT系统适应不同工作条件,文献[19]采取PI控制调节逆变器移相角和半控整流桥实现系统工作在最大效率的同时能够恒压输出。文献[20]通过对系统耦合系数进行辨识动态追踪系统最大效率同时用PI控制调节系统输出,进一步提高了WPT系统的实用性。由于WPT系统是一种典型的非线性系统,使传统的PID控制器的参数难以整定,且PID控制器存在“快速性”与“超调量”之间的矛盾[21],而新兴的LADRC控制器虽然在大部分情况下可替代PID控制器,但是LADRC并不适用于WPT系统这种对观测器带宽要求过高的应用场景。尽管滑模控制和H∞鲁棒控制的控制方法可以精确地控制WPT系统的输出电压,但是这两种方法对系统数学模型过于依赖,不利于控制更复杂的WPT系统。
前馈PI控制是一种广泛应用于工业控制系统的控制算法[22]。该算法将比例控制和积分控制相结合,同时引入前馈控制技术,以提高控制系统的响应速度和稳定性。前馈PI控制的工作原理是在PI控制器中添加前馈环节,用于预测被控对象的输出,根据预测值提前调节控制器的输出,以缩短被控对象的响应时间和调节误差。前馈环节的作用是基于被控对象的状态变化提前计算控制器的输出变化量,然后将其加到控制器的输出信号中,以消除系统的滞后效应[23]。由于前馈PI控制器能够对扰动进行实时补偿,因此本文采用前馈PI控制器控制WPT系统,相较于传统的PI控制器,前馈PI控制器能够为WPT系统提供更优良的控制效果。
为实现在负载以及耦合线圈互感变化条件下WPT系统恒压输出和最大效率追踪双重目标的控制需求,本文提出一种基于前馈PI控制与阻抗匹配技术的复合控制方法。对双边LCC型WPT系统的参数、效率和传输功率进行了详细分析,并进行了参数优化设计,以协调系统工作时的传输功率和传输效率。在此基础上,引入复合控制方法,即在一次侧采用前馈PI控制技术调节系统输出电压,在二次侧采用四开关管升降压电路实现阻抗匹配,同时引入了线圈互感估算方法以适应耦合机构可能发生偏移的WPT系统。该复合控制方法可以保证效率和电压两个控制回路之间的互不干扰,系统能够实现恒压输出并时刻保持较高效率运行。
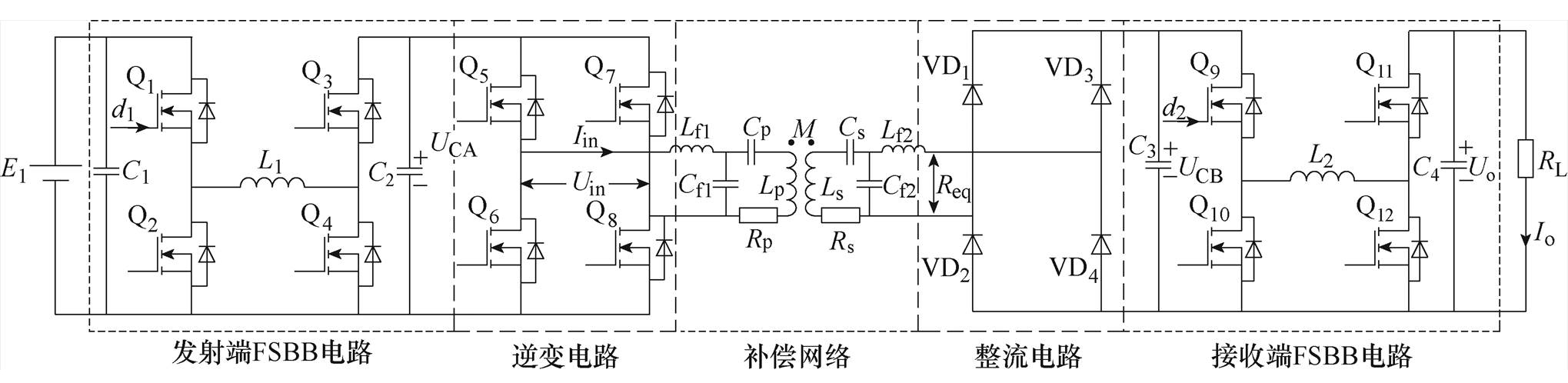
图1为双边LCC型WPT系统结构。其中,开关管Q1~Q4,电感L1与滤波电容C1、C2构成发射端四开关管升降压(Four-Switch Buck-Boost, FSBB)电路。开关管Q5~Q8作为逆变电路驱动一次侧耦合线圈。补偿电感Lf1、补偿电容Cp与Cf1构成了一次侧LCC补偿网络,Lp为一次侧耦合线圈自感,补偿电感Lf2、补偿电容Cs与Cf2构成了二次侧LCC补偿网络,Ls为二次侧耦合线圈自感,Rp和Rs分别为Lp和Ls的内阻。VD1~VD4构成整流电路。开关管Q9~Q12,电感L2与滤波电容C3、C4构成接收端FSBB电路。
图1 双边LCC型WPT系统结构
Fig.1 Structure of the proposed LCC-LCC topology WPT system
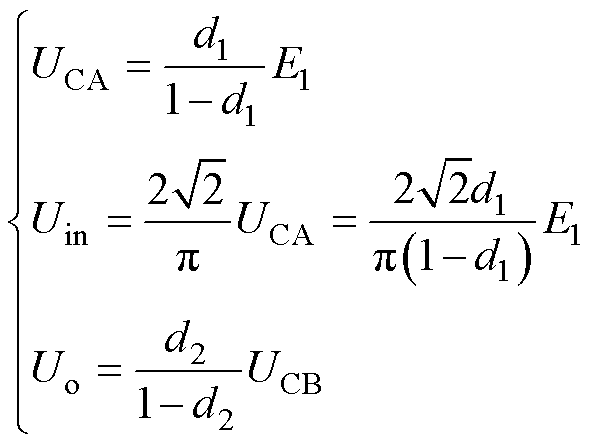
图1中,E1为直流输入电压,UCA为发射端FSBB电路输出电压,Uin为逆变器输出电压有效值,Req为二次侧等效交流电阻,Uo与Io分别为负载端电压与电流。图中,发射端FSBB电路中,Q1与Q4同时导通,Q2与Q3同时导通,且Q1与Q2交互导通,d1为Q1管的占空比,接收端FSBB电路同理,d2为Q9管的占空比。发射端FSBB电路用于调节逆变器输入电压从而控制Uin的值,接收端FSBB电路用于调节二次侧等效交流电阻Req实现最大效率追踪,其输入电压为UCB。易得各参数之间关系表达式为
 (1)
(1)
为简化计算,绘制双边LCC型WPT系统互感模型如图2所示。图中, 为逆变器输入电压基波有效值,
为逆变器输入电压基波有效值, 、
、 、
、 、
、 分别为各个回路电流有效值。
分别为各个回路电流有效值。
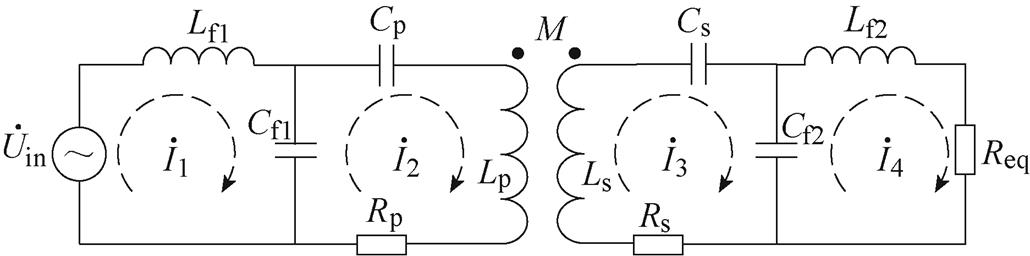
图2 双边LCC型WPT系统等效互感模型
Fig.2 LCC-LCC topology WPT system mutual inductance model
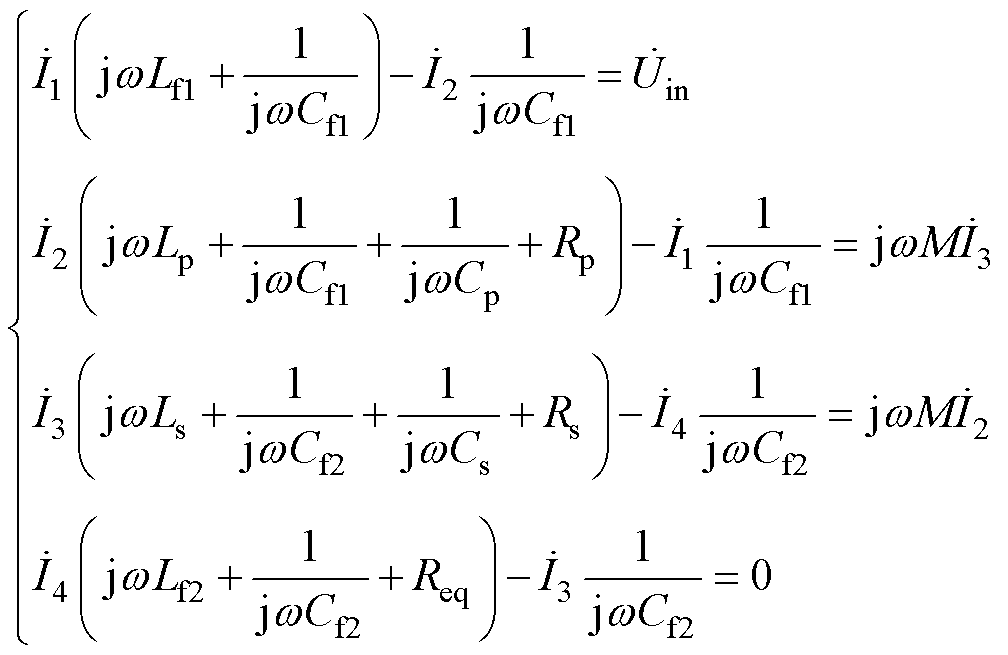
根据基尔霍夫电压定律(Kirchhoff’s Voltage Law, KVL),可列得电路表达式为
 (2)
(2)
根据式(2)可计算系统的输入功率与输出功率分别为
 (3)
(3)
进一步地,逆变器基波输出到负载的效率为
 (4)
(4)
对式(4)求导,得到系统传输效率最高时等效负载ROPT为
 (5)
(5)
双边LCC型WPT系统补偿拓扑结构的参数较多,为了使该WPT系统的性能满足实际需求,需要对其补偿参数进行优化设计。对双边LCC型WPT系统的传输功率进行分析,由于线圈内阻较小,分析系统传输功率时可忽略其影响。根据文献[24],双边LCC型WPT系统工作在谐振状态下且不考虑线圈内阻时,系统传输功率为
 (6)
(6)
由式(6)可知,WPT系统传输功率与二次侧等效电阻成正比,与线圈互感,一次侧、二次侧补偿电容参数,输入电压三者的二次方成正比。因此,在输入电压有效值不变,且二次侧等效电阻大小仅用于追踪系统最大效率的情况下,为了增加系统传输功率,需要改变耦合线圈之间的互感以及补偿电容的参数。通常条件下,增大线圈自感可以提高系统传输功率,但这也会不可避免地增大线圈面积及其内阻。因此,为了提高系统的传输功率,需要进一步分析谐振网络参数对系统传输功率的影响。
本文设计的WPT系统将根据第2节所提及的控制方法使系统持续追踪最大效率点,故在系统参数优化的分析中,假定系统始终工作在最大效率点,又由于线圈内阻对系统传输功率的影响可以忽略,因此不考虑线圈内阻对功率的影响[24]。基于此假设,将式(5)代入式(3),即可得到该系统在最大效率点时的传输功率及传输效率分别为
 (7)
(7)
由式(7)可知,在系统工作频率以及线圈间互感值一定,且系统工作在最佳效率点时,其最大效率主要受发射线圈内阻与接收线圈内阻影响。由于线圈内阻值及其自感值均与线圈的匝数呈正相关,减小线圈匝数能够减小线圈内阻,从而提高系统的最大效率,但同时,耦合线圈间的互感也会减小从而导致系统传输功率降低。因此,合理的线圈匝数能够保证系统具有足够的传输功率,同时保证较高的能量传输效率。
为了进一步分析线圈匝数与系统传输功率与传输效率的关系,需要分析线圈匝数与线圈内阻以及线圈自感值的关系。本文采用圆形线圈作为能量传输机构,线圈缠绕紧密且内径与外径之比较大。假设现有耦合机构均使用圆形线圈且匝数均为x,沿外径紧密绕制增加该线圈匝数,增加线圈匝数的同时保证较大的线圈内径与外径之比,最终线圈匝数变为 ,则倍数N与变化前后的线圈自感及其等效电阻的理论近似关系为
,则倍数N与变化前后的线圈自感及其等效电阻的理论近似关系为
 (8)
(8)
由于WPT系统的工作频率固定不变,耦合线圈中采用的利兹线极大地降低了高频率时的趋肤效应和邻近效应所导致的导体交流电损耗,因此式(8)中忽略了高频交流电导致的趋肤效应与邻近效应。令发射线圈与接收线圈的匝数相等,则变化前后的线圈间的互感值有
 (9)
(9)
将式(8)代入式(7)可以得到线圈匝数变为先前的N倍时,系统的传输功率与最大传输效率分别为
 (10)
(10)
式中, 为线圈匝数增加后,补偿电容Cf1变化后的值。式(10)表明,随着倍数N增大,系统的最大传输效率也越大,此时若补偿电容的值与线圈匝数倍增前的补偿电容Cf1的值相等,则系统的传输功率将增大。补偿电容与
为线圈匝数增加后,补偿电容Cf1变化后的值。式(10)表明,随着倍数N增大,系统的最大传输效率也越大,此时若补偿电容的值与线圈匝数倍增前的补偿电容Cf1的值相等,则系统的传输功率将增大。补偿电容与 的有以下参数关系
的有以下参数关系
 (11)
(11)
式中, 为线圈匝数增加后,补偿电容Cp变化后的值。式(11)表明,当倍数N增大时,要使补偿电容值与线圈匝数增加前的补偿电容Cf1值相等,可通过减小补偿电容值实现。
为线圈匝数增加后,补偿电容Cp变化后的值。式(11)表明,当倍数N增大时,要使补偿电容值与线圈匝数增加前的补偿电容Cf1值相等,可通过减小补偿电容值实现。
根据式(10)与式(11),随倍数N增大,即线圈匝数增加,传输效率及传输功率均会增加。因此,为实现最大传输效率同时提高系统的传输功率,可以适当增加耦合线圈匝数同时保证补偿电容Cf1与Cf2的值不变,通过减小补偿电容Cp与Cs的值从而确保系统工作在谐振状态。
实际设计时,倍数N的取值不宜过大,即不能过多地增加线圈匝数,否则线圈的内径与外径之比将变小,最终实际情况将与理论结果偏差较大,此时式(8)不成立。因此,倍数N的选取能够满足系统最大需求功率即可。
在保证补偿电容Cf1与Cf2的值为恒定值时,绘制倍数N(N<2)与系统的传输功率与最大传输效率关系如图3所示。由图3可知,随着倍数N增大,传输效率及传输功率均上升。
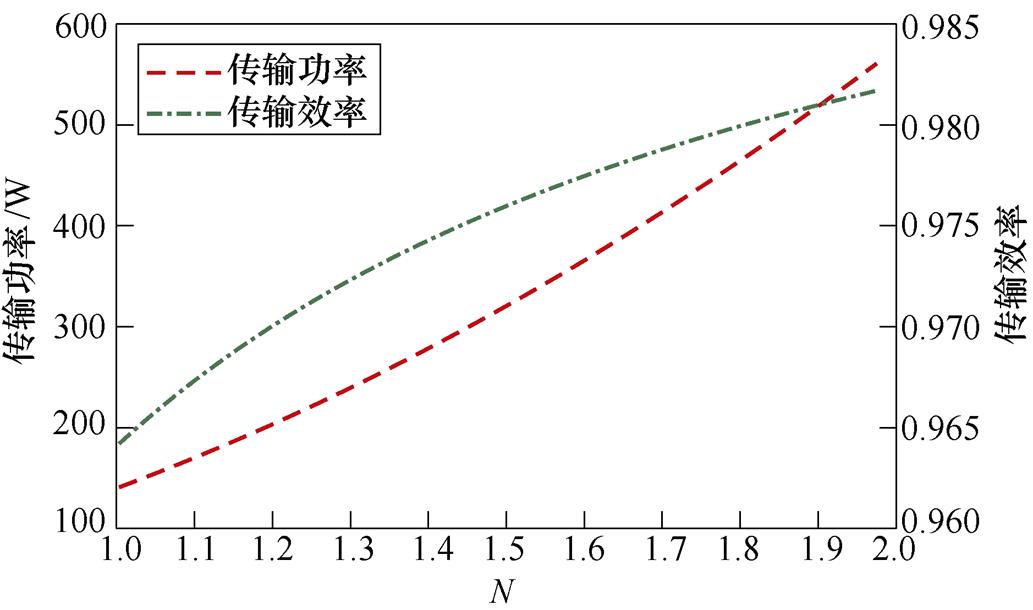
图3 倍数N与系统的传输功率及传输效率关系
Fig.3 The relationship between N and the output power and transmission efficiency of the system
基于以上分析,在双边LCC补偿拓扑的WPT系统中,一次侧、二次侧拓扑参数相同的情况下,WPT系统参数优化流程如图4所示。
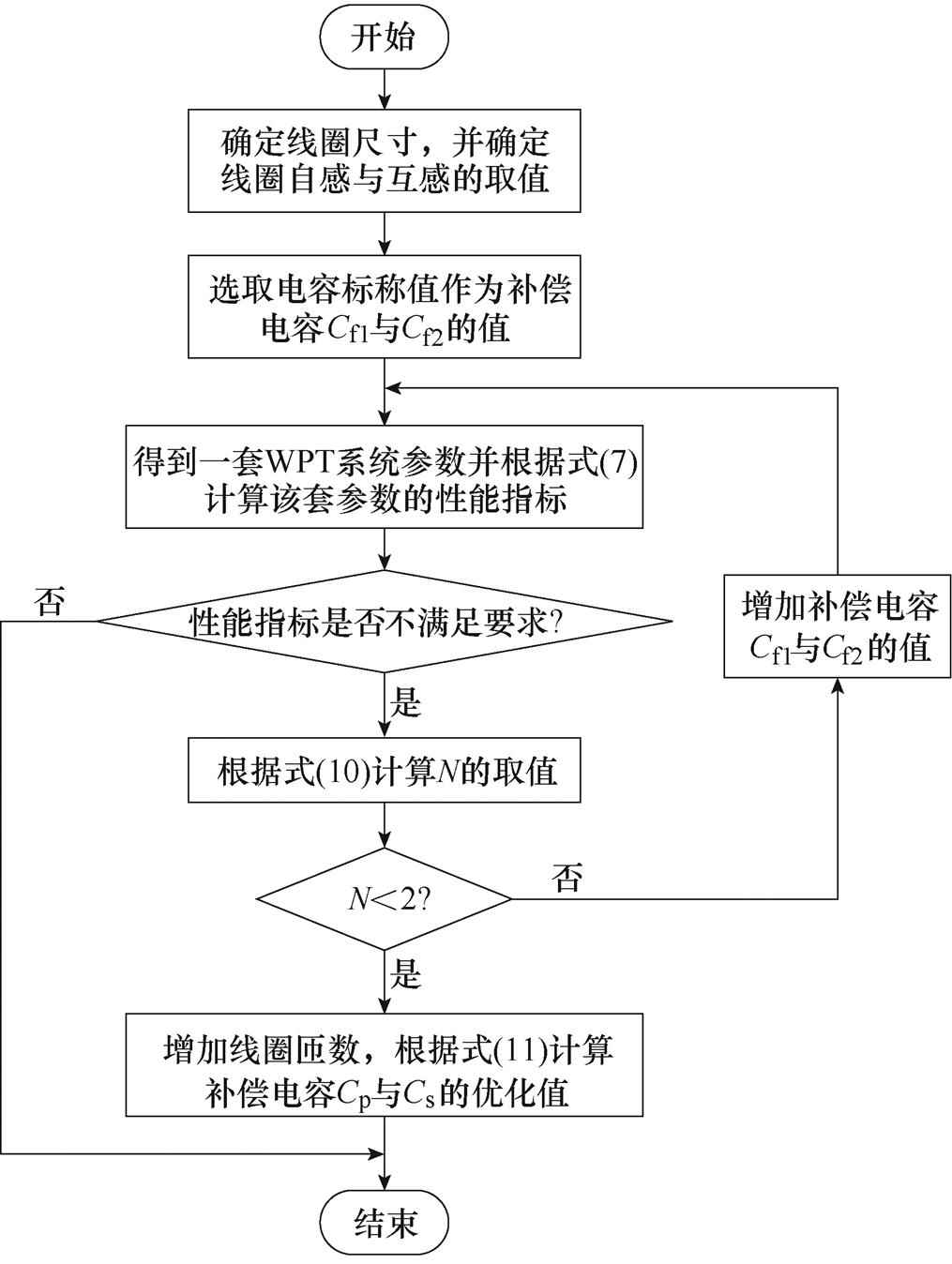
图4 WPT系统参数优化流程
Fig.4 Parameter Optimization Flowchart
图4中,首先根据WPT系统的应用场景确定耦合线圈的尺寸范围。考虑到后续可能需要增加线圈匝数,故确定基本尺寸时需要留有裕度。之后确定线圈基本尺寸并绕制完成后,测量得线圈自感Lp和Ls。再根据工作场景确定系统中线圈耦合系数值k,并根据 即可得到耦合线圈间的互感值。然后,选取一个电容标称值作为补偿电容Cf1与Cf2的值,根据线圈的自感值与补偿电容Cf1与Cf2的值计算得到WPT系统参数。最后,根据式(7),计算WPT系统的传输功率与传输效率,并判断该套参数是否满足WPT系统要求,若满足要求则结束参数优化设计,若不满足则需根据WPT所需的最高功率等级,结合式(10)计算出N的取值。若N<2,则增加线圈匝数并保持补偿电容Cf1与Cf2的值不变,并根据式(11)计算增加线圈匝数后补偿电容与
即可得到耦合线圈间的互感值。然后,选取一个电容标称值作为补偿电容Cf1与Cf2的值,根据线圈的自感值与补偿电容Cf1与Cf2的值计算得到WPT系统参数。最后,根据式(7),计算WPT系统的传输功率与传输效率,并判断该套参数是否满足WPT系统要求,若满足要求则结束参数优化设计,若不满足则需根据WPT所需的最高功率等级,结合式(10)计算出N的取值。若N<2,则增加线圈匝数并保持补偿电容Cf1与Cf2的值不变,并根据式(11)计算增加线圈匝数后补偿电容与 的优化值,结束参数优化设计。若 N>2,则需选取更大的电容标称值作为补偿电容
的优化值,结束参数优化设计。若 N>2,则需选取更大的电容标称值作为补偿电容 与
与 的值,并继续参数优化过程。
的值,并继续参数优化过程。
本文电源输入电压为30 V,在发射端FSBB电路不对逆变器输入电压进行升压处理的条件下,期望WPT系统在工作最大效率点时的传输功率达到200 W,优化设计得到的WPT系统的基本参数见表1。
表1 WPT系统参数
Tab.1 WPT system parameter
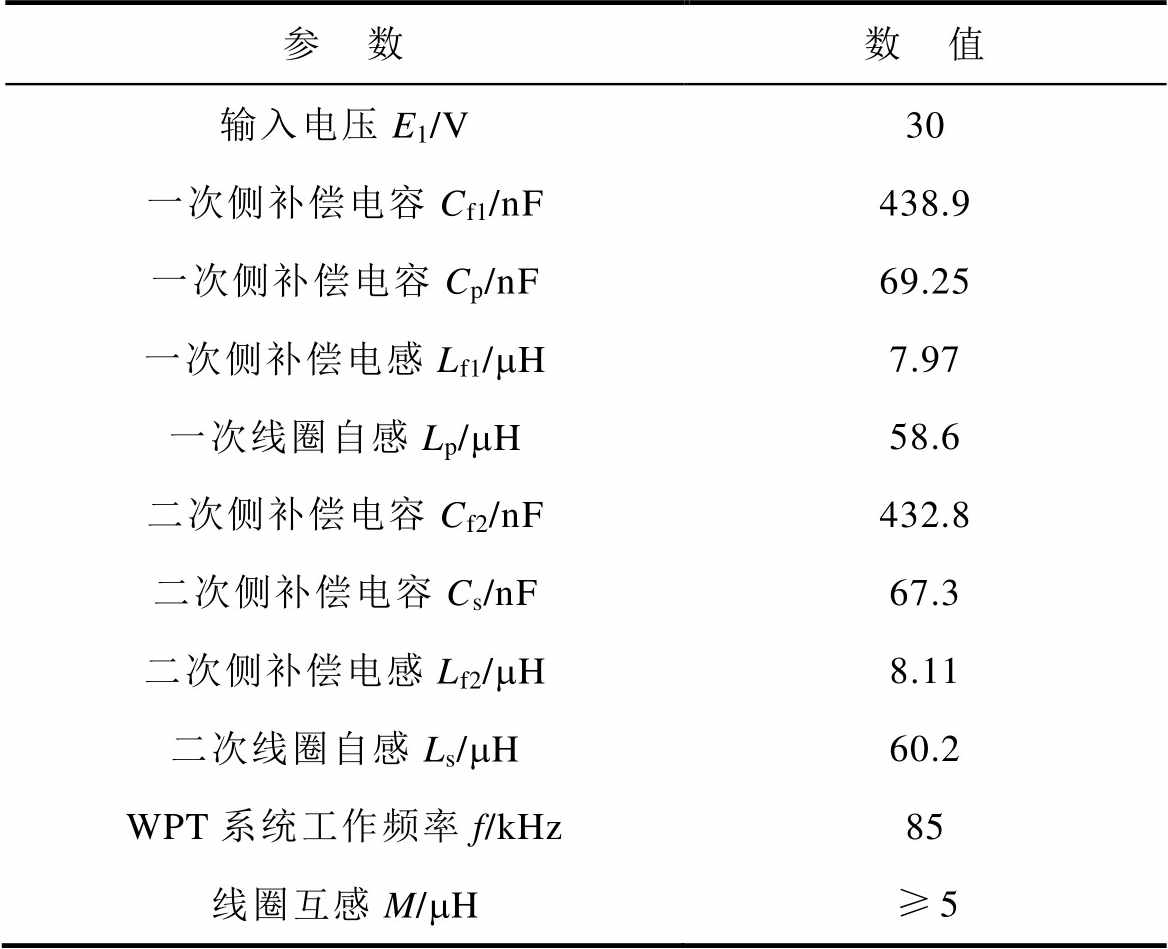
参 数数 值 输入电压E1/V30 一次侧补偿电容Cf1/nF438.9 一次侧补偿电容Cp/nF69.25 一次侧补偿电感Lf1/mH7.97 一次线圈自感Lp/mH58.6 二次侧补偿电容Cf2/nF432.8 二次侧补偿电容Cs/nF67.3 二次侧补偿电感Lf2/mH8.11 二次线圈自感Ls/mH60.2 WPT系统工作频率f/kHz85 线圈互感M/mH5
设定负载输出电压为20 V,则系统的最终传输功率将由负载电阻决定,第2节将介绍该WPT系统最大效率与恒压输出的复合控制方法。
由第1节的分析可知,当WPT系统的互感值确定后,可以求得系统最大传输效率时的最优等效负载ROPT,其值的大小可由式(5)表示。若系统能够一直追踪最优等效负载ROPT的值,则系统能够时刻都工作在最大效率点。为了追踪最优等效负载值,需要采用阻抗匹配的方法使WPT系统持续追踪最大效率点。
常用的阻抗匹配电路主要有Buck电路、Boost电路和Buck-Boost电路等,这三种基本拓扑工作在连续导通模式(Continous Conduction Mode, CCM)下时输入输出电压以及等效负载的关系见表2。
表2 DC-DC变换器关系表达式
Tab.2 DC-DC variator relation expression
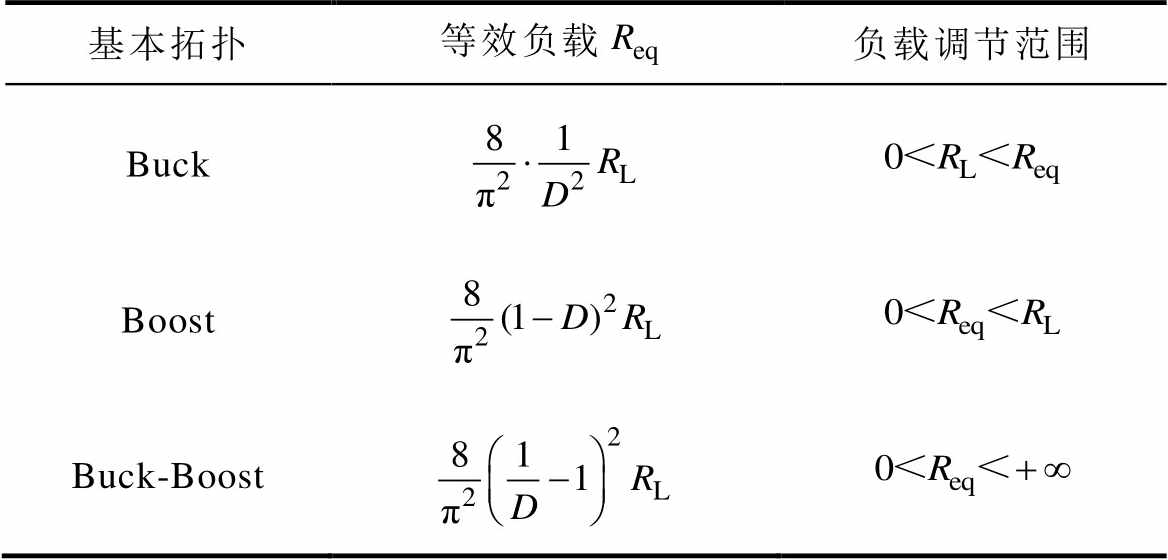
基本拓扑等效负载负载调节范围 Buck Boost Buck-Boost
理论上,Buck-Boost电路对负载的调节范围无穷大。因此,本文选择FSBB电路作为阻抗匹配电路。
为使FSBB电路工作在CCM下,定义该电路工作频率为fs,则电感L2满足
 (12)
(12)
若电路中所有元器件均为理想模型,则根据功率相等原则计算得到最大效率时最佳占空比d2为
 (13)
(13)
式中,RL取值可由其两端电压与流过的电流比值得到,即RL=Uo/Io。因此在负载值发生变化时,利用式(13)即可测得当前负载值,将负载值代入式(13)即可获得当前负载值所对应的最大效率下的最佳占空比d2。当控制器输出给接收端FSBB电路的PWM信号占空比为d2时,使系统时刻工作在最大效率点。
由1.2节的分析可知,当系统工作在最大效率点时,负载两端的输出电压为
 (14)
(14)
由式(14)可知,占空比d2会影响负载两端的电压,当占空比d2及电路基本补偿元件的参数均不发生改变时,调节Uin的大小是改变负载两端的输出电压唯一方法,而Uin的大小可以通过发射端FSBB电路进行调节。由式(1)可知,Uin的大小由电源电压E1以及占空比d1决定,最终得到
 (15)
(15)
当系统工作在最大效率点时,WPT系统的电压增益可表示为
 (16)
(16)
式中,K为负载两端电压相对电源电压的电压增益,即 ;K1用于简化电压增益的表达式,且K1的值与该WPT系统的固有参数有关,在线圈不发生偏移的情况下保持不变。当占空比d2的值改变,而电压增益K的值保持不变时,根据式(16)即可得到
;K1用于简化电压增益的表达式,且K1的值与该WPT系统的固有参数有关,在线圈不发生偏移的情况下保持不变。当占空比d2的值改变,而电压增益K的值保持不变时,根据式(16)即可得到 的估算值
的估算值 为
为
 (17)
(17)
式中,占空比d2的值可由式(13)确定,电压增益K的值可根据负载侧所需的输出电压值确定,在已知电源电压的情况下,K1的值仅在互感M发生变化的情况下改变。因此,在已知电源电压与互感值M的情况下,通过式(17)可直接计算得到估算值。控制器得到估算值后,此时由于实际电路并非理想的数学模型,负载两端电压与负载电压设定值之间仍有一定的误差,因此,考虑将该估算值作为WPT系统前馈控制部分的输入,同时通过依赖于误差函数,而不依赖于精确数学模型的PI控制器进行反馈控制,使负载两端电压完全等于负载电压设定值,最终得到的发射端FSBB电路占空比为d1。本文设计的带前馈补偿的PI控制结构如图5所示。
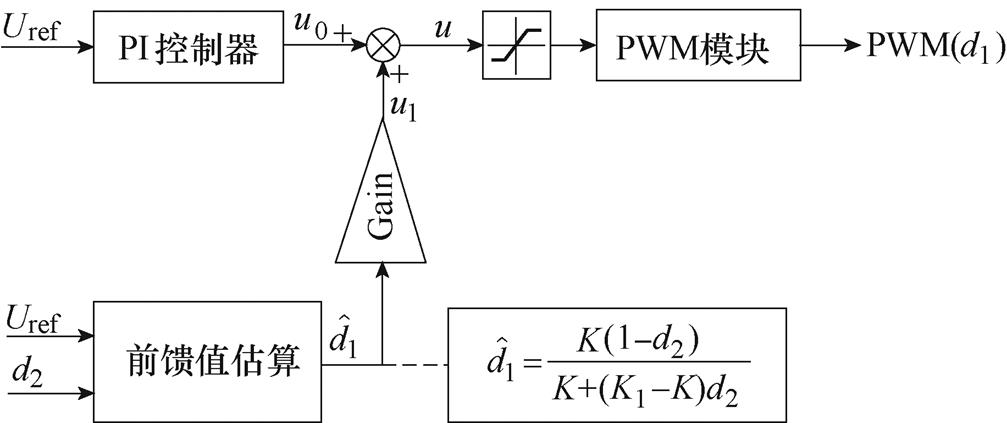
图5 WPT系统前馈PI控制结构
Fig.5 Block of the feed-forward PI control of WPT system
该控制方法通过对占空比进行估算,不仅能够提高系统的响应速率,同时还能实现较高的控制精度。在该前馈PI控制中,可以利用电力电子仿真建模工具对WPT系统进行参数预整定,以改善试凑法所需的多次实验来调节前馈值和PI参数的缺点。通过使用仿真建模工具,模拟不同前馈值和PI参数对WPT系统的控制效果。该方法可以减少实验所需的时间和成本,并更快地评估不同参数设置对系统性能的影响,从而得到最佳的前馈值和PI参数组合。
第2节分析中,给出了已知互感值条件下的WPT系统最大效率以恒压输出复合控制的方法,但WPT系统在实际的运行过程中,线圈间的相对位置往往会发生变化,这将改变线圈间的互感大小。因此,为使WPT系统更加稳定,需要实时估算线圈间的互感大小。WPT系统线圈间的互感大小可以利用当前时刻系统的电路参数来估算,涉及到原接收端FSBB电路的占空比d1及d2,并通过采集电路中各支路电流有效值大小,即可对互感值M进行估算。可以简单的测量得到整流桥输出电压直流有效值UCB,定义整流桥输入电压为U2,两者的关系为
 (18)
(18)
又根据式(2)可得
 (19)
(19)
联合式(18)、式(19)及表2中Buck-Boost电路的等效负载公式,可得到互感估算值 为
为
 (20)
(20)
由式(20)可知,通过检测UCB、Uo以及Io,即可估算当前的互感值。当WPT系统基本达到稳定运行状态,即电压输出基本达到稳态时,利用式(20)可得互感估算值。在条件允许的情况下,若WPT系统有条件在投入实际使用前可以进行预测试,则可利用3.2节中的互感估算值修正方法使估算得到的互感值更加接近实际值。
由于电路中半导体元件中存在压降,且WPT系统线路中存在寄生电阻与寄生电感,使得在3.1节中得到的互感估算值与实际值之间存在少量误差,为减小该误差,令互感修正值为 ,其与互感估算值之间的关系为
,其与互感估算值之间的关系为
 (21)
(21)
为得到参数k与b的值,需要得到多组实际互感值M与互感估算值的数据。为测得多组数据,先去除原接收端FSBB电路使WPT系统工作在开环状态,并测量线圈在不同相对位置时的多组实际互感值M并计算当前的互感估算值。将式(20)中的占空比d1、d2设置为0.5,可得到去除原接收端FSBB电路时互感估算值的表达式为
 (22)
(22)
在得到n组实际互感值M与互感估算值的数据后,利用最小二乘法对其进行线性拟合。设实际互感大小M的平均值为 ,互感估算值的平均值为
,互感估算值的平均值为 ,则拟合得直线斜率k与截距b分别为
,则拟合得直线斜率k与截距b分别为
 (23)
(23)
利用式(23)计算得到拟合直线斜率k与截距b的值后,即可根据式(21)对WPT系统的耦合系数值进行实时估计以完成最大效率追踪。综合第1节、第3节内容,该WPT系统控制流程如图6所示。
为验证本文所提WPT系统控制方法的有效性,根据图1所示的电路拓扑结构,搭建了如图7所示的实验平台,其中WPT系统工作频率采用85 kHz,发射端与接收端的FSBB电路开关频率均为100 kHz。
图7中,一次侧与二次侧的控制器均使用TMS320F28335型DSP处理器,用于采集系统工作时的电压和电流数据以及实现文中提到的控制算法,其中,处理器之间采用板载高速WiFi模块ESP8266进行无线通信,用于一次侧、二次侧的系统数据的传递。电路中使用的开关管型号为IRFB4227,负载电流大小利用霍尔传感器ACS724采集。采用Chroma 11050-5M来测量线圈的自感以及线圈间的互感,使用Tektronix MSO2024B示波器用来记录实验波形。耦合线圈是200股的利兹线绕制而成的圆环形结构,半径为13 cm,线圈间的气隙距离为5 cm。图7所述实验平台具体参数见表3。
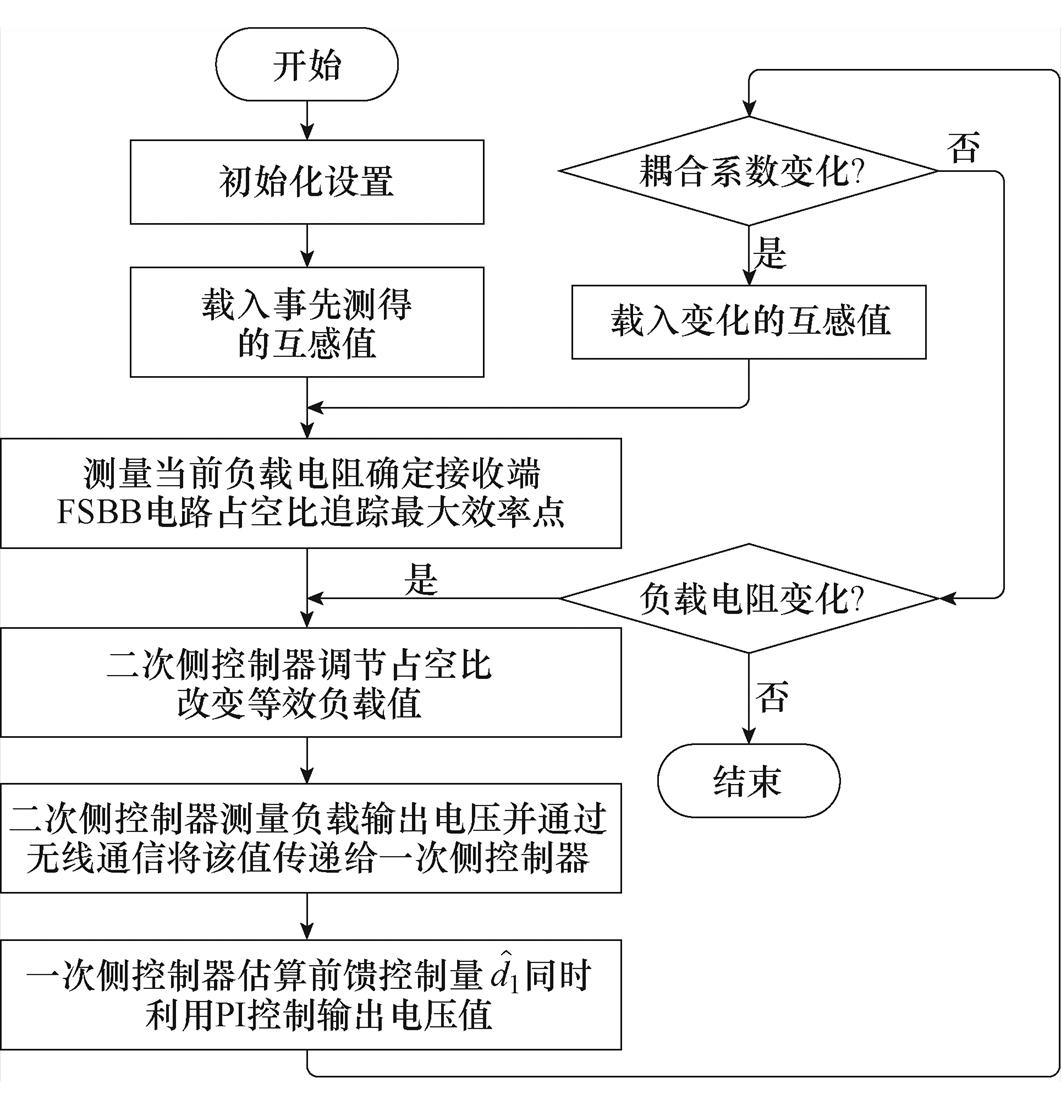
图6 控制流程
Fig.6 Control flowchart
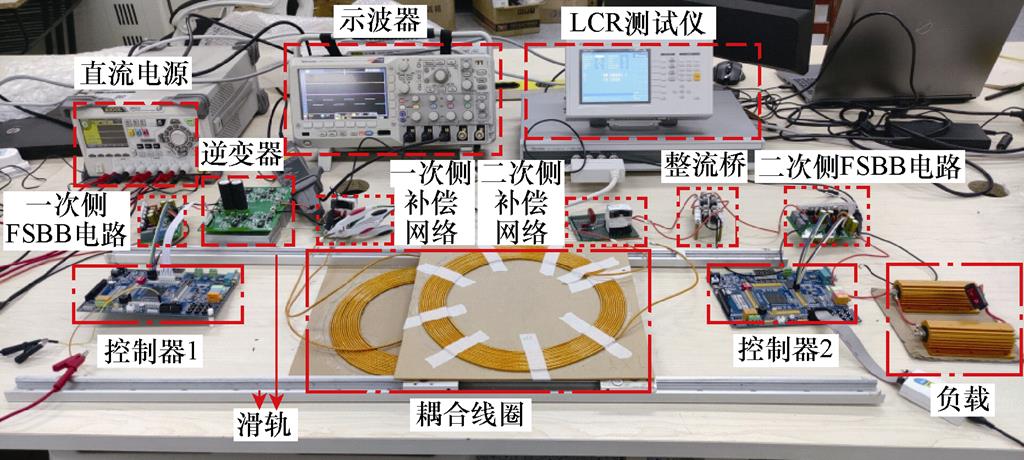
图7 实验平台
Fig.7 Experimental platform
表3 实验平台具体参数
Tab.3 Experimental platform specific parameters
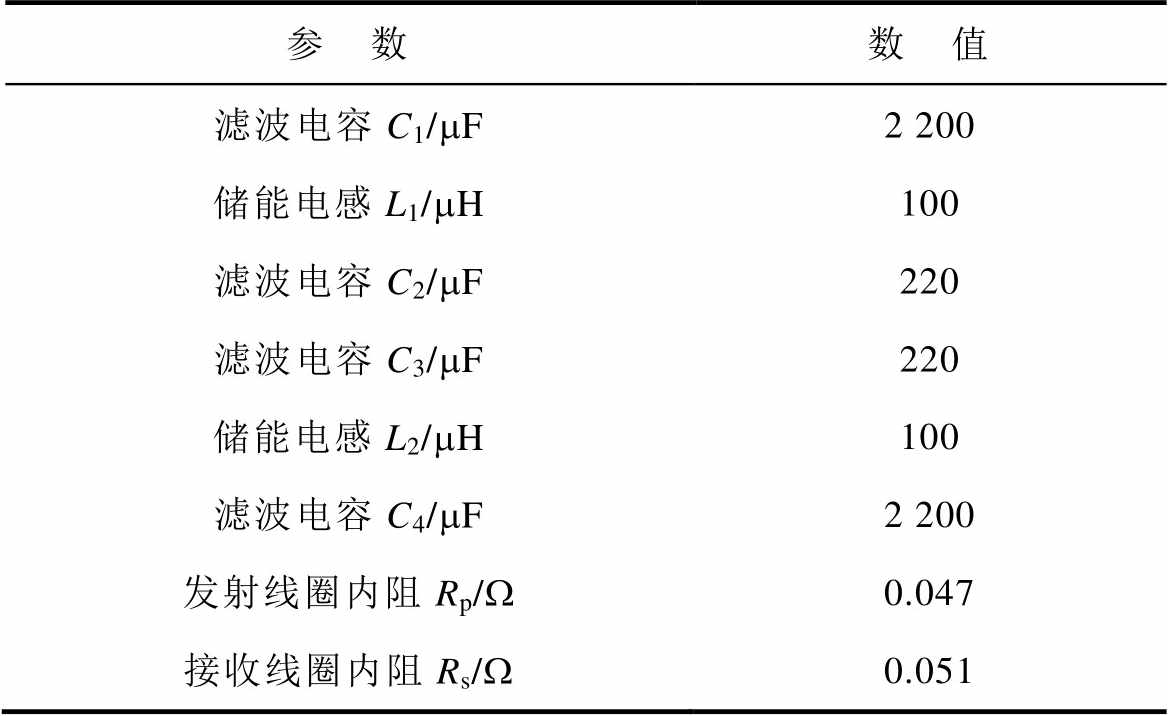
参 数数 值 滤波电容C1/mF2 200 储能电感L1/mH100 滤波电容C2/mF220 滤波电容C3/mF220 储能电感L2/mH100 滤波电容C4/mF2 200 发射线圈内阻Rp/W0.047 接收线圈内阻Rs/W0.051
为了验证理论分析,分别采用PI控制与前馈PI控制调节WPT系统的输出电压,通过仿真预整定,前馈PI控制器中的前馈值设置为0.8。在启动瞬态、负载突变、互感变化以及参考电压变化的四种实验条件下,对比分析控制效果,并在实验过程中记录了线圈间互感值的识别误差。
4.2.1 互感识别结果
实验中,由于线圈互感大小与线圈间的偏移距离有关,因此图7中的实验平台中使用了滑轨以便更好地记录线圈偏移距离与互感值的关系。线圈间的水平距离在 [-12, 12] cm范围变化,利用第3节中的实验方法得到一组互感实测值,互感实测值与估算值关系如图8所示。
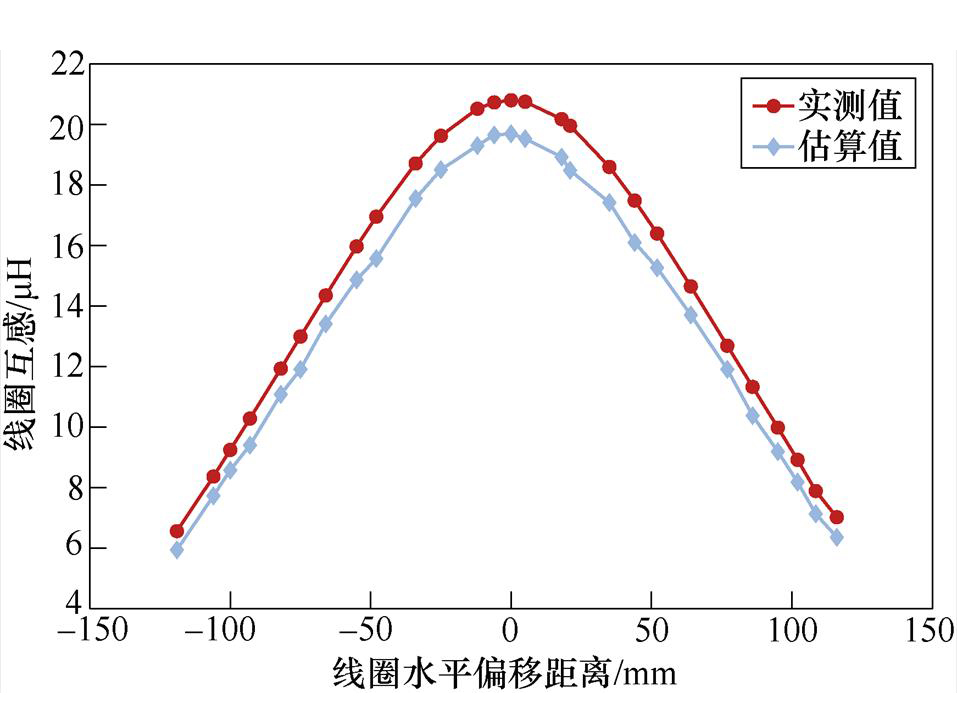
图8 互感实测值与估算值关系
Fig.8 Relationship between measured and estimated values of mutual inductance
将实验测得的数据代入式(23),即可求得线圈互感估算值修正系数,即k=1.045、b=0.389×10-6。将该修正系数代入式(21),得到互感估算修正值计算公式。得到互感估算修正值计算公式后,再次进行实验,测试得到一组新的互感实测值及估算值和对应的估算修正值与线圈水平偏移距离的数据,以检验估算值修正方案的可靠性,新测得的数据中互感实测值与估算值及估算修正值关系如图9所示。
图9中,互感估算值平均相对误差为4.74%,而互感估算修正值平均相对误差为0.69%。因此,实验结果表明,估算的互感值经过修正后,与互感实测值更为接近,验证了本文提出的互感识别方法的可行性。因此,在条件允许的情况下利用事先测得的数据来得到互感估算值的修正系数,然后通过式(21)可以更准确地估算线圈之间的互感值。
4.2.2 系统启动过程的测试结果
本节实验观测比较了前馈PI控制与普通PI控制的WPT系统启动响应速度。设定输出参考电压20 V,电源输入电压30 V,设置负载大小分别为1、5、10及20 W。逆变器输出电压、电流分别为Uin、Iin,得到的实验波形分别如图10与图11所示。
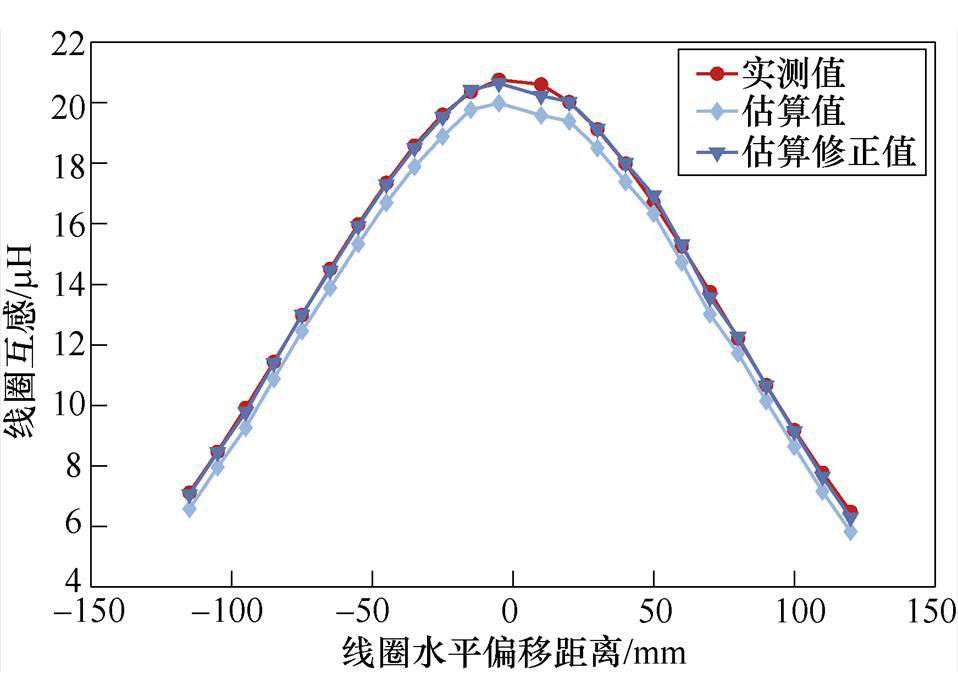
图9 互感实测值与估算值及估算修正值关系
Fig.9 Relationship between measured value of mutual inductance, estimated value and estimated modified value
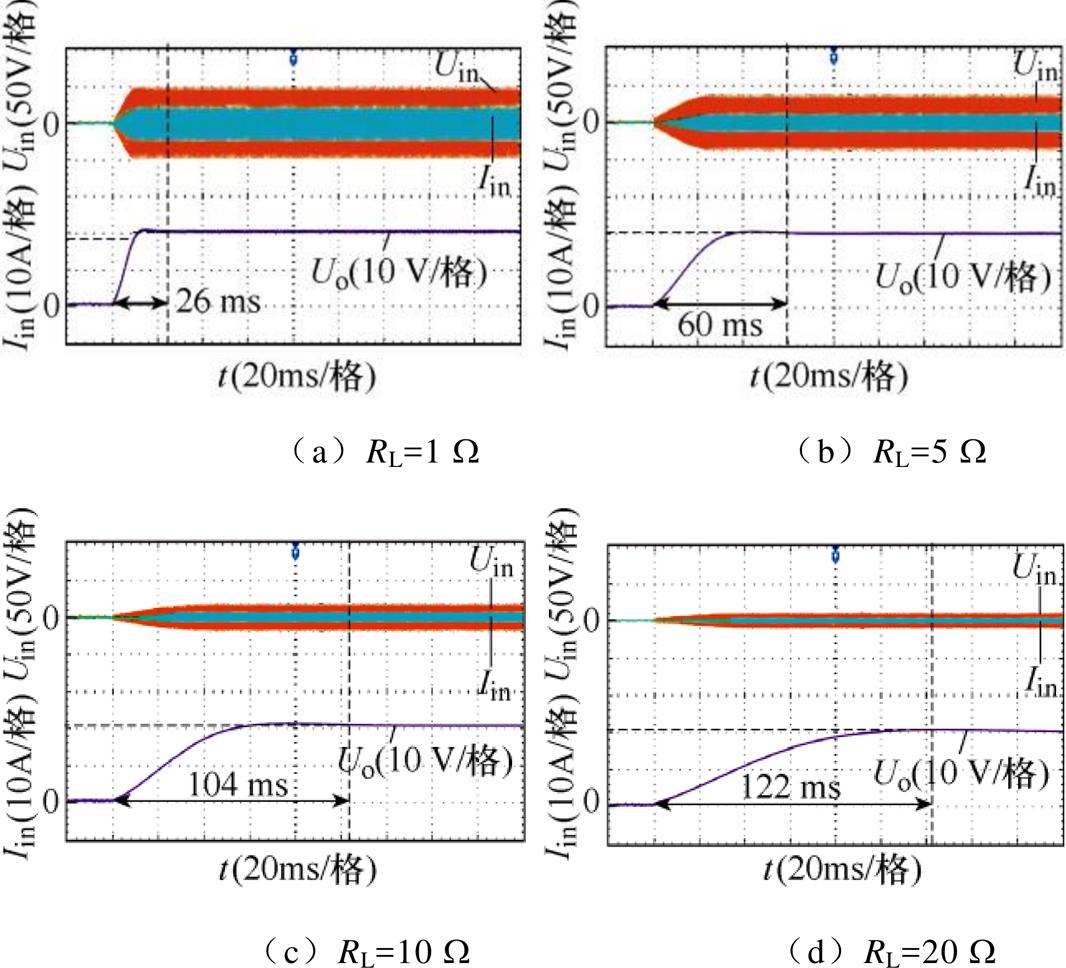
图10 PI控制下的系统启动波形
Fig.10 Startup waveforms for PI control
由图10和图11可知,在不同的负载下,系统启动时间有明显差异,即负载值越小系统输出电压越快达到设定值。原因在于单自由度FSBB电路与普通升降压电路特性一致,其响应速度与电路的负载大小有较大关系,负载值越大,响应速度越慢。在PI控制器下,WPT系统的启动速度受负载大小影响明显,而在前馈PI控制器下,由于提前估算了占空比d1的大小并进行了前馈补偿,WPT系统的启动速度受负载大小影响相对较小。因此,在负载值较大时前馈PI控制的启动速度远快于普通PI控制,实验结果验证了理论分析的正确性。
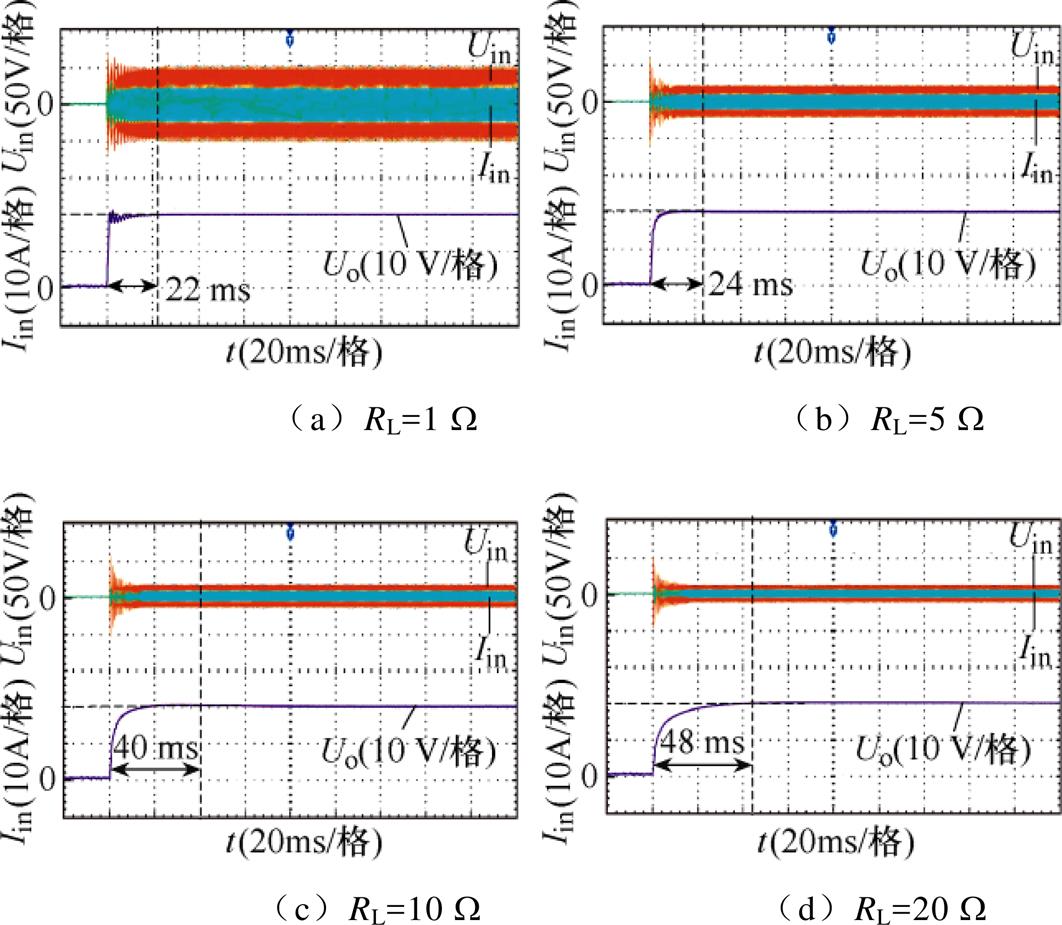
图11 前馈PI控制下的系统启动波形
Fig.11 Startup waveforms for feedforward PI control
4.2.3 负载及互感变化的测试结果
同4.2.2节,设定输出参考电压20 V,电源输入电压30 V。由表2给出的Buck-Boost电路阻抗匹配特性可知,当负载值变大时,为使系统等效负载值保持不变,接收端FSBB电路的占空比d2的值将增大,而式(15)表明,占空比d2增大后系统输出电压也将增大,因此负载大小从5 W 跳变到10 W 时,系统输出电压将产生一定的超调,此时发射端FSBB电路将调节占空比d1的大小以维持系统输出电压的稳定。图12展示了当系统负载值从5 W 跳变到10 W 时,PI控制以及前馈PI控制的输出波形。
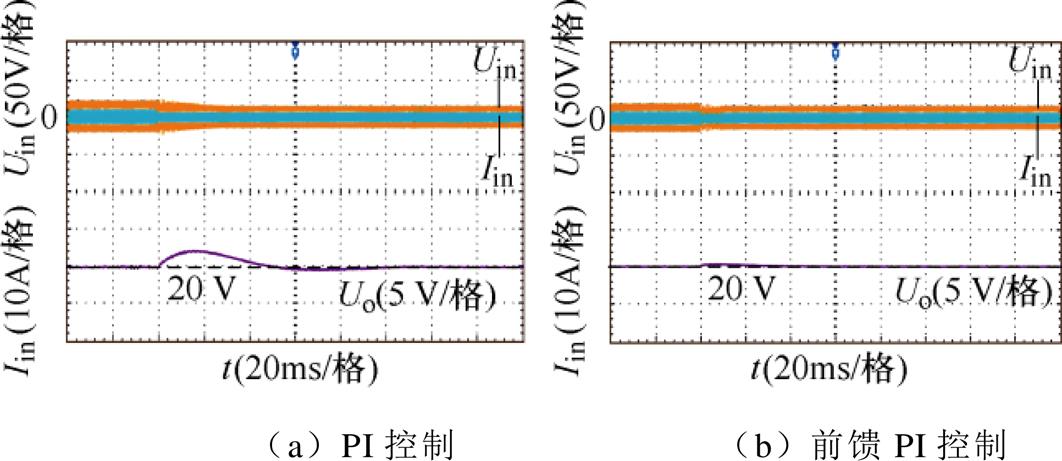
图12 负载突变瞬态波形
Fig.12 Transient waveforms of sudden change in load
图12中,PI控制器产生的最大超调量为2.95 V,而前馈PI控制器在占空比d2增大的同时,通过估算立即减小了占空比d1的值,仅产生了0.46 V的超调量。实验结果表明,前馈PI控制器在负载变化的WPT系统中表现出更好的鲁棒性。
由式(15)可知,互感值大小与输出电压值呈线性相关,当互感值增大时,发射端FSBB电路将减小占空比d1使系统输出电压稳定,在PI控制器中,d1完全通过误差反馈调整,而前馈PI控制中d1可根据式(17)进行估算,其中,式(17)中的互感值M可根据式(20)、式(21)估算得到,将该估算值进行前馈补偿,理论上可以减小系统由于线圈互感 变化而产生的超调。因此,设置负载大小恒定为5 W,输出电压参考值20 V,以测试系统线圈互感值变化时系统恒压输出效果。图13展示了当系统线圈互感值变化时,PI控制以及前馈PI控制的输出波形。
变化而产生的超调。因此,设置负载大小恒定为5 W,输出电压参考值20 V,以测试系统线圈互感值变化时系统恒压输出效果。图13展示了当系统线圈互感值变化时,PI控制以及前馈PI控制的输出波形。
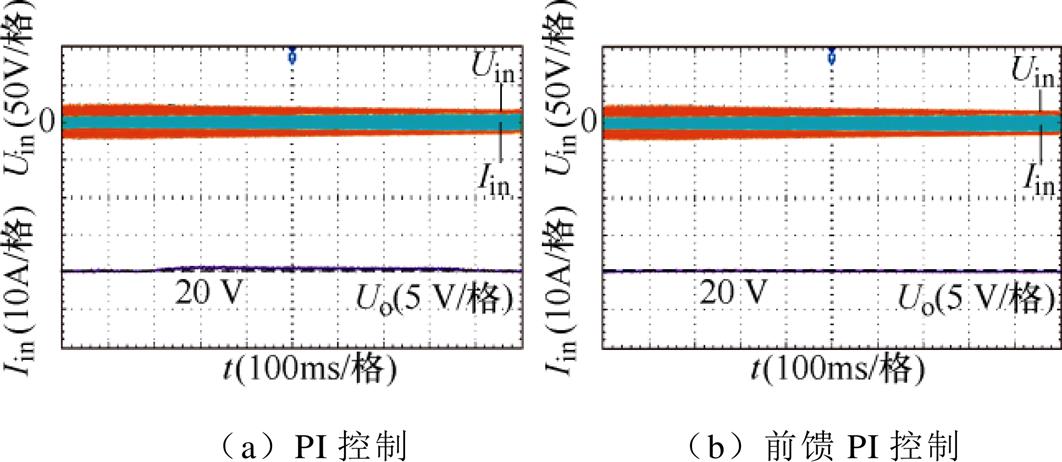
图13 系统线圈互感变化瞬态波形
Fig.13 Transient waveforms of system coil mutual inductance change
图13中,由于线圈互感的实际值在变化过程中无法动态测量,因此仅记录了测试中的互感初始值与互感最终值,其大小分别为9.18 mH和15.71 mH,变化过程持续0.5 s。其中,系统线圈互感变化时PI控制的最大超调量为0.55 V,而前馈PI控制中的超调量仅为0.1 V,实验结果表明,前馈PI控制器在系统线圈互感变化时同样具有更好的鲁棒性。
4.2.4 参考电压突变的测试结果
设置负载大小为5 W,输入电压30 V,设定参考输出电压从20 V跳变到30 V,以测试控制器对参考电压的跟踪性能,其瞬态波形如图14所示。
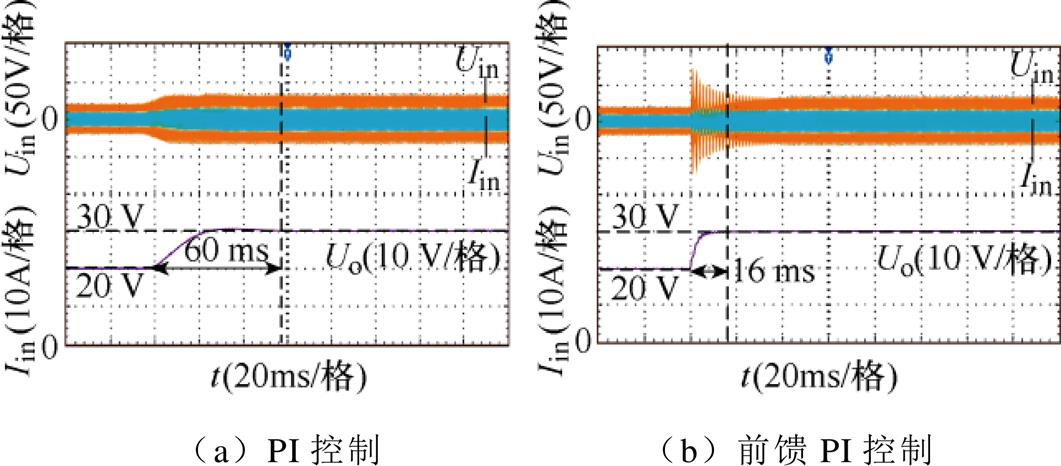
图14 系统参考电压跳变瞬态波形
Fig.14 System reference voltage trip transient waveforms
图14中,由于单自由度FSBB电路的响应速度较慢,PI控制器的响应速度远低于前馈PI控制器的响应速度,并产生了一定的超调。在PI控制器中,设定参考输出电压跳变瞬间,逆变器输入电压与电流均缓慢变化直至系统重新达到稳态,而在前馈PI控制器中,设定参考输出电压跳变瞬间,由于占空比d1也将跳变,故逆变器输入电压与电流也会迅速发生变化并产生一定的波动,最终慢慢达到稳定,其响应速度较普通PI控制器更快,且没有产生超调量。因此,前馈PI控制器相较于普通PI控制器对参考电压的跟踪性能更加优良。
4.2.5 整体实验结果分析
为得到传输效率与互感大小之间的关系,记录实验平台在负载大小为5 W,输入电压30 V,输出参考电压20 V,即系统稳态传输功率为80 W时,不同互感条件下系统达到稳定时的传输效率,结果如图15所示。
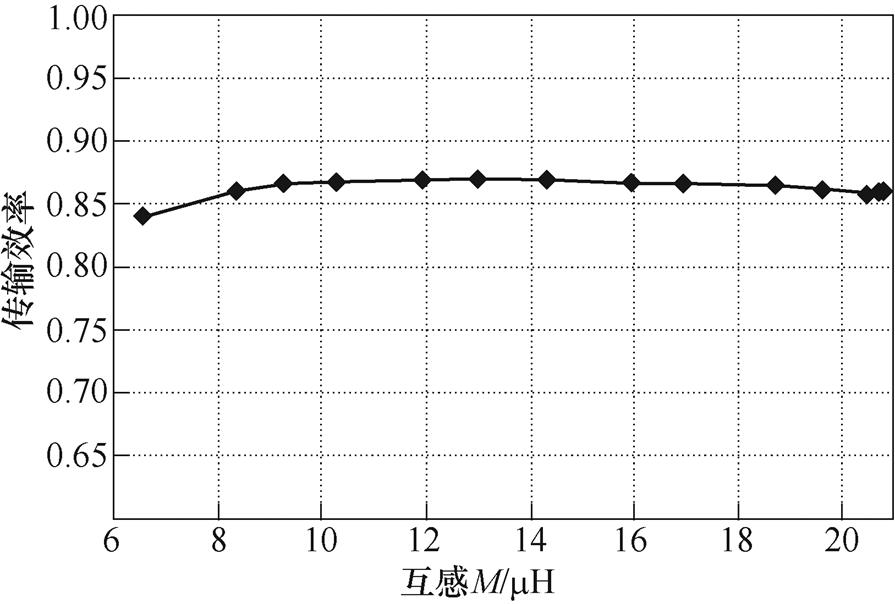
图15 传输效率与互感的关系
Fig.15 The relationship between transmission efficiency and mutual inductance
同理,为得到传输效率与负载大小之间的关系,记录实验平台在互感大小为9.24 mH,输入电压30 V,输出参考电压20 V时,不同负载条件下系统达到稳定时的传输效率,结果如图16所示。
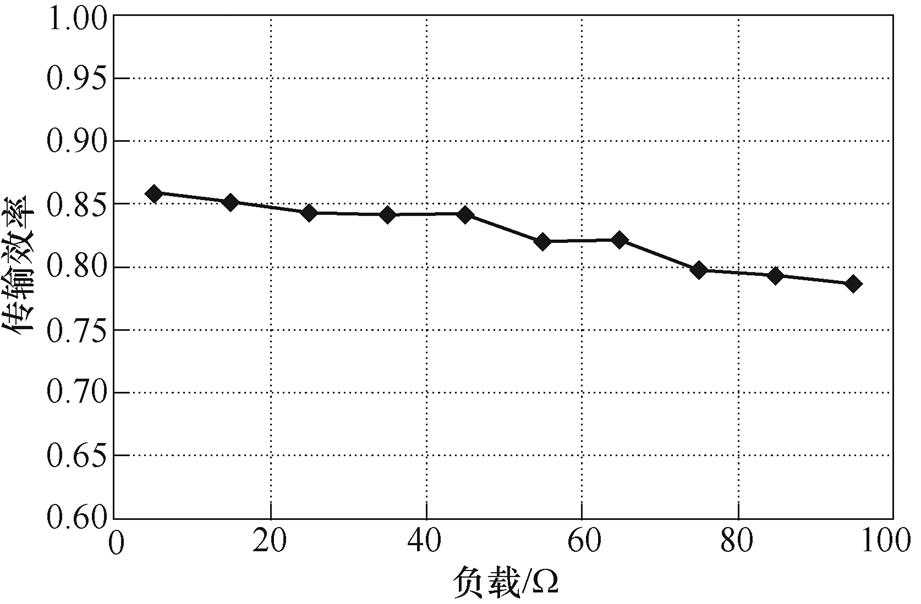
图16 传输效率与负载的关系
Fig.16 The relationship between transmission efficiency and load
图15表明,当系统运行在最大效率追踪的控制策略下时,线圈互感大小对系统传输效率影响较小,最大效率追踪效果较好。采用最大效率追踪控制后,系统根据估算得到线圈互感值,推算该互感值下的最佳等效负载大小,从而调节接收端FSBB电路的占空比d2,同时在检测到负载侧电压变化后,发射端FSBB电路调节占空比d1使负载侧电压维持稳定,保证最大效率追踪控制与恒压输出控制之间互不干扰。
根据式(10),理论上系统运行在最大效率追踪控制策略下时,由于FSBB电路的阻抗匹配作用,系统传输效率不会随负载大小改变。图16中,系统运行在最大效率追踪控制策略下,负载值越大,系统传输功率越低,系统的传输效率越低。该实验结果说明,接收端FSBB电路的阻抗匹配效果与理想效果存在一定的误差,可能的原因为,实际的储能元件并非理想模型,这对实验结果造成了一定影响。
总体实验结果表明,本文所提方法具有较快的系统响应速度以及较高的传输效率。尽管本文所提方法对数学模型依赖度较高,但该数学模型易于得到,且其准确度要求不高,通过前馈PI即可获得良好的控制效果。因此,本文提出的方法优势在于可使得适用于能量传输的WPT系统在宽范围负载变化时保持高效、恒压运行。
表4给出了本文控制方法与现有文献介绍的其他方法的对比。结果中,本文提出的控制方法具有调节时间较快、传输效率较高的特点。首先,WPT系统的性能与其系统补偿拓扑与参数密切相关,故需要对WPT系统进行参数优化使得WPT系统的传输功率和传输效率达到理想值。因此尽管文献[25]中WPT系统的传输效率较高,但传输功率不尽人意。其次,为了保证WPT的耦合机构间发生偏移的情况下依旧可以维持最大效率追踪效果,需要对WPT系统耦合线圈之间的互感值进行估算,尽管文献[9]中的WPT系统控制效果优越,但缺少对线圈之间互感值的估算,从而无法保证耦合线圈发生偏移时系统仍能保持较高的传输效率,限制了其控制方法的应用场景。最后,模型依赖程度是评估控制系统适用范围的重要指标之一,该方面前馈PI控制策略能够在模型依赖程度和系统控制性能之间取得良好的平衡,与文献[25]的H∞ 控制相比,前馈PI的设计更简单,而与文献[19-20]的PI控制器相比,前馈PI的设计略加复杂但能显著地提高系统的响应速度。综上所述,本文控制策略的贡献为,对双边LCC型WPT系统补偿参数的优化设计与耦合线圈间互感值的估算,同时辅助前馈PI的控制方法使得WPT系统在负载或线圈间相对位置变化时仍能保持高效、恒压运行。
表4 与现有文献所提控制方法的比较
Tab.4 Comparison with the methods proposed in the existing literatures
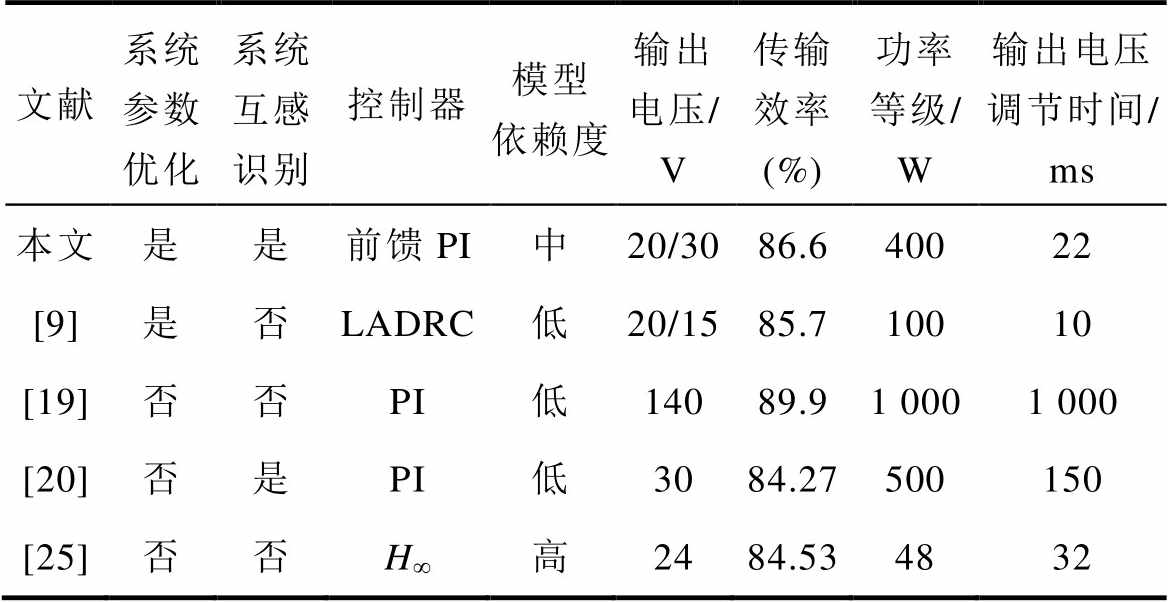
文献系统参数优化系统互感识别控制器模型依赖度输出电压/ V传输效率 (%)功率等级/ W输出电压调节时间/ ms 本文是是前馈PI中20/3086.640022 [9]是否LADRC低20/1585.710010 [19]否否PI低14089.91 0001 000 [20]否是PI低3084.27500150 [25]否否H∞高2484.534832
本文针对WPT系统的输出电压以及能量传输效率受二次侧负载值以及线圈间的偏移对的影响的问题,提出了一种最大效率追踪及负载侧恒压输出复合控制方法。具体工作包括:①分析了双边LCC型WPT系统特性并提出了补偿参数优化设计方法;②提出了WPT系统最大效率追踪方法,设计了适用WPT系统的前馈PI控制器;③给出了WPT系统耦合线圈互感估算方法,并通过线性拟合修正估算结果,提高了系统的鲁棒性。本文提出的前馈PI控制方法具有响应速度快、鲁棒性强等优点。实验结果表明,与传统PI控制相比,前馈PI控制器有快速、抗干扰、无超调等优势。该控制方法适用于多种静态WPT应用场合,如电动自行车、自动导引运输车(Automated Guided Vehicle, AGV)小车等,也可用于低速动态WPT系统。由于FSBB电路阻抗匹配的性能受到储能元件实际性能的影响,因此,在负载调节范围较宽时,将会影响WPT系统最大效率追踪效果。下一步可对FSBB电路阻抗匹配性能的提高方法做进一步研究。
参考文献
[1] 杨庆新, 张献, 章鹏程. 电动车智慧无线电能传输云网[J]. 电工技术学报, 2023, 38(1): 1-12.
Yang Qingxin, Zhang Xian, Zhang Pengcheng. Intelligent wireless power transmission cloud network for electric vehicles[J]. Transactions of China Elec- trotechnical Society, 2023, 38(1): 1-12.
[2] 李建国, 张波, 荣超. 近场磁耦合无线电能与信息同步传输技术的发展(上篇): 数字调制[J]. 电工技术学报, 2022, 37(14): 3487-3501.
Li Jianguo, Zhang Bo, Rong Chao. An overview of simultaneous wireless power and information transfer via near-field magnetic links (part I): digital modu- lation[J]. Transactions of China Electrotechnical Society, 2022, 37(14): 3487-3501.
[3] 李建国, 张波, 荣超. 近场磁耦合无线电能与信息同步传输技术的发展(下篇): 电路拓扑[J]. 电工技术学报, 2022, 37(16): 3989-4003.
Li Jianguo, Zhang Bo, Rong Chao. An overview of simultaneous wireless power and information transfer via near-field magnetic links (part Ⅱ): circuit topo- logy[J]. Transactions of China Electrotechnical Society, 2022, 37(16): 3989-4003.
[4] 陈凯楠, 蒋烨, 檀添, 等. 轨道交通350kW大功率无线电能传输系统研究[J]. 电工技术学报, 2022, 37(10): 2411-2421, 2445.
Chen Kainan, Jiang Ye, Tan Tian, et al. Research on 350kW high power wireless power transfer system for rail transit[J]. Transactions of China Electrotechnical Society, 2022, 37(10): 2411-2421, 2445.
[5] 张波, 荣超, 江彦伟, 等. 分数阶无线电能传输机理的提出及研究进展[J]. 电力系统自动化, 2022, 46(4): 197-207.
Zhang Bo, Rong Chao, Jiang Yanwei, et al. Proposal process and research progress of fractional-order wireless power transfer mechanism[J]. Automation of Electric Power Systems, 2022, 46(4): 197-207.
[6] 张亚伟, 王兴国, 朱箫. 考虑线圈偏移的无线充电系统恒流/恒压输出研究[J]. 电气技术, 2022, 23(6): 93-98, 108.
Zhang Yawei, Wang Xingguo, Zhu Xiao. Research on constant current/constant voltage output of wireless charging system under coil misalignments[J]. Elec- trical Engineering, 2022, 23(6): 93-98, 108.
[7] Xia Chenyang, Li Xinyu, Sun Qiqi, et al. Integrated control method for constant output voltage and maximum efficiency tracking of bilateral LCL compensation ICPT system[J]. IET Electric Power Applications, 2020, 14(10): 1956-1965.
[8] Neath M J, Swain A K, Madawala U K, et al. An optimal PID controller for a bidirectional inductive power transfer system using multi-objective genetic algorithm[J]. IEEE Transactions on Power Electronics, 2014, 29(3): 1523-1531.
[9] 夏晨阳, 李晓丽, 韩潇左, 等. IPT系统线性自抗扰恒压输出和最大效率跟踪复合控制方法[J]. 中国电机工程学报, 2022, 42(16): 6042-6052, 6178.
Xia Chenyang, Li Xiaoli, Han Xiaozuo, et al. A hybrid control method for achieving constant voltage output with LADRC and maximum efficiency tracking for IPT systems[J]. Proceedings of the CSEE, 2022, 42(16): 6042-6052, 6178.
[10] Yang Yun, Zhong Wenxing, Kiratipongvoot S, et al. Dynamic improvement of series-series compensated wireless power transfer systems using discrete sliding mode control[J]. IEEE Transactions on Power Elect- ronics, 2018, 33(7): 6351-6360.
[11] 李砚玲, 杜浩, 杨鸣凯, 等. 基于互质因子分解的感应电能传输系统双自由度H∞ 控制[J]. 电工技术学报, 2018, 33(20): 4746-4755.
Li Yanling, Du Hao, Yang Mingkai, et al. Two- degree-of-freedom H∞ control for inductive power transfer system based on coprime factorization[J]. Transactions of China Electrotechnical Society, 2018, 33(20): 4746-4755.
[12] 任洁, 刘野然, 岳鹏飞, 等. 基于参数优化法的输出抗偏移感应电能传输系统研究[J]. 中国电机工程学报, 2019, 39(5): 1452-1461.
Ren Jie, Liu Yeran, Yue Pengfei, et al. Study on anti-misalignment inductive power transfer system based on parameter optimized method[J]. Proceedings of the CSEE, 2019, 39(5): 1452-1461.
[13] Wang Xueqing, Xu Jianpiang, Ma Hongbo, et al. Inductive power transfer systems with digital switch- controlled capacitor for maximum efficiency point tracking[J]. IEEE Transactions on Industrial Elec- tronics, 2021, 68(10): 9467-9480.
[14] Fu Minfan, Ma Chengbin, Zhu Xinen. A cascaded boost-buck converter for high-efficiency wireless power transfer systems[J]. IEEE Transactions on industrial informatics, 2014, 10(3): 1972-1980.
[15] 吴月宝, 赵晋斌, 张少腾, 等. 基于径向基神经网络的多负载无线电能传输系统自适应阻抗匹配方法[J]. 电工技术学报, 2021, 36(19): 3969-3977.
Wu Yuebao, Zhao Jinbin, Zhang Shaoteng, et al. An adaptive impedance matching method based on radial basis function neural network in multi-load wireless power transfer systems[J]. Transactions of China Electrotechnical Society, 2021, 36(19): 3969-3977.
[16] Zhong Wenxing, Hui S Y. Maximum energy effici- ency tracking for wireless power transfer systems[J]. IEEE Transactions on Power Electronics, 2015, 30(7): 4025-4034.
[17] 邹静, 徐耘英, 彭娟娟, 等. 基于频率切换实现电池恒流和恒压充电的LCC-S补偿WPT系统研究[J]. 电源学报, 2023, 21(3): 117-124.
Zou Jing, Xu Yunying, Peng Juanjuan, et al. Research on LCC-S compensated WPT system based on frequency switching to realize CC and CV charging for battery[J]. Journal of Power Supply, 2023, 21(3): 117-124.
[18] Zhong Wenxing, Hui S Y. Reconfigurable wireless power transfer systems with high energy efficiency over wide load range[J]. IEEE Transactions on Power Electronics, 2018, 33(7): 6379-6390.
[19] 麦瑞坤, 刘野然, 陈阳. 基于最优等效负载控制的感应电能传输系统效率优化方法研究[J]. 中国电机工程学报, 2016, 36(23): 6468-6475, 6613.
Mai Ruikun, Liu Yeran, Chen Yang. Studies of efficiency optimization methods based on optimal equivalent load control in IPT systems[J]. Pro- ceedings of the CSEE, 2016, 36(23): 6468-6475, 6613.
[20] 赵进国, 赵晋斌, 张俊伟, 等. 无线电能传输系统中有源阻抗匹配网络断续电流模式最大效率跟踪研究[J]. 电工技术学报, 2022, 37(1): 24-35.
Zhao Jinguo, Zhao Jinbin, Zhang Junwei, et al. Maximum efficiency tracking study of active impe- dance matching network discontinous current mode in wireless power transfer system[J]. Transactions of China Electrotechnical Society, 2022, 37(1): 24-35.
[21] 韩京清. 从PID技术到“自抗扰控制”技术[J]. 控制工程, 2002, 9(3): 13-18.
Han Jingqing. From PID technique to active disturbances rejection control technique[J]. Basic Automation, 2002, 9(3): 13-18.
[22] Yan Xiaohui, Chen Mou, Feng Gang, et al. Fuzzy robust constrained control for nonlinear systems with input saturation and external disturbances[J]. IEEE Transactions on Fuzzy Systems, 2021, 29(2): 345- 356.
[23] Beschi M, Dormido S, Sanchez J, et al. Event-based PI plus feedforward control strategies for a distributed solar collector field[J]. IEEE Transactions on Control Systems Technology, 2014, 22(4): 1615-1622.
[24] 蔡进, 吴旭升, 胡风革, 等. 双边LCC感应耦合式无线电能传输系统的稳定性分析与效率优化设计[J]. 电工技术学报, 2020, 35(增刊2): 355-362.
Cai Jin, Wu Xusheng, Hu Fengge, et al. Stability analysis and efficiency optimization design of bilateral LCC inductively coupled power transmission system[J]. Transactions of China Electrotechnical Society, 2020, 35(S2): 355-362.
[25] Tan Linlin, Xie Huiru, Wu Zhijun, et al. An optimized power-efficiency coordinated control method for EVs charging and discharging applications[J]. IEEE Transactions on Industrial Electronics, 2023, 70(7): 7257-7267.
Abstract Currently, the critical challenge in the practical application of wireless power transfer (WPT) technology lies in the inability to guarantee a constant voltage output and high-efficiency power transmission. Many researchers have studied these two issues. However, most focus on the constant output voltage or system transmission efficiency separately. Therefore, this paper proposes a compound control method for maximizing efficiency tracking and maintaining a constant voltage output in a WPT system.
Firstly, four-switch buck-boost (FSBB) converters are added to the primary and secondary sides in a double-sided LCC compensation topology for the WPT system. The transmission power and efficiency of this structural WPT system are derived, and the compensation component parameters are analyzed. A method for optimizing the compensation component parameters is presented. Furthermore, a maximum efficiency tracking strategy is obtained by the impedance matching principle of the secondary side FSBB converter. A feedforward PI controller is designed based on the voltage gain expression of the WPT system, which controls the primary side FSBB converter to maintain a constant output voltage at the load terminals. Additionally, the mutual inductance value of the coupling coil is estimated according to the voltages and currents of each branch during the operation of the WPT system and the system's component parameters. A linear fitting method is proposed to correct the estimated mutual inductance value. Combined the maximum efficiency tracking strategy with the constant voltage control strategy, a compound control method is developed, and a flowchart of the control method is provided. Finally, the proposed compound control method is validated through experiments.
Experimental results show that the average relative error of the estimated mutual inductance and mutual inductance correction is 4.74% and 0.69%, respectively. The proposed mutual inductance estimation method is verified. Regarding constant voltage output, the feedforward PI control method has a fast response speed and strong disturbance rejection compared to the traditional PI control method. Regarding maximum efficiency tracking, when the load varies within the range of 1~50 W, the power transmission efficiency of the WPT system remains above 80%.
In conclusion, this paper studies the impact of system load and coil displacement on output voltage and energy transmission efficiency in WPT systems. A compound control method is proposed for maximum efficiency tracking and constant voltage output. The main conclusions are: (1) The characteristics of the double-sided LCC-type WPT system are analyzed, and a compensation parameter optimization design method is proposed. (2) A maximum efficiency tracking method for WPT systems is introduced, and a suitable feedforward PI controller is designed. (3) A mutual inductance estimation method is proposed for WPT systems, improving system robustness by correcting the estimation results with linear fitting. The proposed control method can be applied to static WPT occasions, such as electric bicycles, AGV vehicles, and low-speed dynamic WPT systems.
keywords:Wireless power transfer, maximum efficiency tracking, constant voltage output, feed-forward PI control, mutual inductance recognition
DOI: 10.19595/j.cnki.1000-6753.tces.230549
中图分类号:TM724
国家自然科学基金(61903129)和湖北工业大学博士科研启动基金(BSQD2020012)资助项目。
收稿日期 2023-04-27
改稿日期 2023-06-26
黄文聪 男,1977年生,博士,副教授,研究方向无线电能传输技术、电力电子与电力传动等。E-mail: hwc@hbut.edu.cn(通信作者)
饶天彪 男,2001年生,硕士研究生,研究方向为无线电能传输技术、电力电子与电力传动等。E-mail: 102200220@hbut.edu.cn
(编辑 陈 诚)