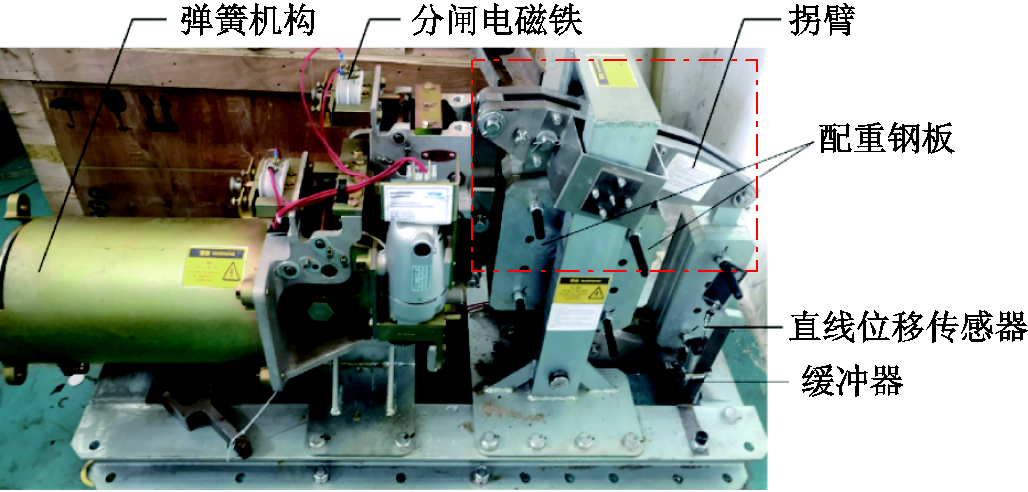
图1 高压断路器操动机构实验装置
Fig.1 Experimental equipment of high voltage circuit breaker operating mechanism
摘要 高压断路器是电力系统中关键的控制和保护设备,断路器机械特性的准确测量是其故障诊断和寿命预测的先决条件,对于保证系统的安全稳定运行具有重要意义。近年来,多种基于接触式传感器的机械特征监测方法被提出。但是,接触式传感器必须安装在断路器的本体结构上,存在诸多缺陷,例如传感器类型及安装位置对信号的影响、对机构正常工作的影响。针对传统接触式传感器的缺陷,该文提出一种基于机器视觉的机械特征提取方法。首先,使用高速图像采集系统采集机构的运动轨迹;然后,利用霍夫变换对视频图像中的关键角点进行自动定位;最后,基于Lucas-Kanade光流法跟踪关键角点的运动轨迹,得到高压断路器的机械特性。通过与行程传感器测量的数据对比,验证了上述方法的准确性。
关键词:高压断路器 机器视觉 霍夫变换 LK光流场法
高压断路器(High Voltage Circuit Breaker, HVCB)是电力系统中起保护和控制作用的关键电气设备,其运行状况直接决定着电力系统的运行安全和经济效益[1-3]。操动机构的机械故障是影响高压断路器可靠运行的主要故障类型之一[4-6]。目前,传统的高压断路器机械特性测量方法是在运动机构上安装加速度传感器、位移传感器、光栅传感器和旋转编码器[7-10]。
针对断路器零部件取早期故障的微弱故障特征,文献[11]使用加速度传感器将振动信号按照动作时序进行分时分割处理,利用混沌吸引子形态特性判断断路器零部件故障严重程度。文献[12]提出一种基于随机森林的多传感器联合决策方法,该方法改变了以传感器为单位的多传感器决策融合模式,集成了各传感器中子模型的诊断信息。文献[13]提出一种基于振动信号的高压断路器弹簧疲劳程度检测方法,该方法基于多个测点的振动信号分析来实现对弹簧疲劳程度的在线定量检测。文献[14]利用自适应噪声集合经验模态分解对高压断路器的振动信号逐步拆分,计算谱形状熵特征,由分群粒子群算法优化支持向量机模型对断路器操动状态进行辨识。文献[15]利用电流-振动信号构建故障特征数据集,通过定义“变异系数”细致描绘特征在样本类内和类间的波动性,根据特征敏感因子优选得到不同故障类型下的类聚几何最优特征集。
如前文所述,针对高压断路器的机械故障诊断已经得到了广泛研究,主要集中在传统机器学习算法的改进。如何准确提取高压断路器的机械特性,是基于机器学习算法进行故障诊断的关键。但是传感器类型及安装位置影响有效信号的采集,高压断路器型号众多且现场情况复杂多变,提取的振动信号和实验室模拟的信号存在差异,影响算法的实际使用效果[16]。此外,在操作上述现场实施方法时,传感器的安装和拆卸会给运动构件带来附加质量,干扰其正常运转,甚至某些安装方式会破坏断路器的机械结构,从而造成无法挽回的影响。
随着机器视觉技术的发展[17-18],基于机器视觉的高压断路器机械特征提取方法被陆续提出。文献[19]利用高速相机测量高压断路器合闸弹簧动态振动特性,研究了弹簧应力松弛故障对断路器合闸弹簧振动特性的影响。文献[20]利用高速相机采集了12 kV永磁机构断路器的速度特性,但是该方法严重依赖人工标记,不仅繁琐且容易引入人为误差。此外,在进行标记点(角点)位置选取时都忽略了部分标记点,因为图像梯度原因导致该点无法被准确定位和全程跟踪。
为了解决上述问题,本文提出了一种基于机器视觉的光流跟踪目标轨迹的改进方法。在采集到机构运动的视频图像之后,首先,利用Shi-Tomasi角点检测算法筛选出强角点并进行跟踪,采用OpenCV中自适应阈值处理技术对原始图像进行预处理;然后,使用霍夫变换算法自动定位理想中被检测的角点;最后,使用Lucas-Kanade (LK)光流场算法对角点进行轨迹跟踪并输出其运动轨迹曲线。经过实验对比论证,证明改进后的计算量大大减少,精度得到明显提高。
本文构建了高压断路器操动机构实验装置,如图1所示。该装置主要由弹簧机构、分合闸线圈、拐臂等组成,可以模拟弹簧操动机构的分合闸特性。合闸弹簧机构储能后,合闸线圈控制弹簧储能释放,由传动机构带动拐臂旋转,拐臂触碰缓冲器,合闸阶段完成,断路器维持在合闸状态。如图1所示,红色点画线区域为操动机构的运动拐臂,其运动轨迹较为明显且所在位置有利于视频采集。另外,在拐臂下方安装有直线位移传感器。
图1 高压断路器操动机构实验装置
Fig.1 Experimental equipment of high voltage circuit breaker operating mechanism
角点检测是计算机视觉系统中获取图像特征的一种方法,广泛应用于运动检测[21]、图像匹配[22-23]等领域。其中,Shi-Tomasi角点检测算法是一种基于窗口滑动模型的角点判别方法,通过灰度一阶导数在一定范围内是否最大来判断特征点是否为强角点。如果窗口中心点为I(x, y),平移为(u, v),则窗口的灰度变化为
 (1)
(1)
式中,S为窗口移动的区域; 为窗口函数,可以根据不同的需要赋予不同的权重;
为窗口函数,可以根据不同的需要赋予不同的权重; 为图像灰度;
为图像灰度; 为平移后的图像灰度。用泰勒展开式近似任意方向,有
为平移后的图像灰度。用泰勒展开式近似任意方向,有
 (2)
(2)
将式(2)代入式(1)可以得到 的新表达式,即
的新表达式,即
 (3)
(3)
其中,M为2×2矩阵,有
 (4)
(4)
式中, 、
、 为I(x, y)的偏微分,表示是在x和y方向上的梯度图。
为I(x, y)的偏微分,表示是在x和y方向上的梯度图。
若矩阵M的两个特征值中较小的一个大于阈值,则判定此像素点(x, y)为强角点。
本实验通过高速相机对高压断路器动作过程进行拍摄,设置采样率为4 788 f/s,分辨率为 1 024×1 024,然后对高压断路器操动机构的运行数据进行采集。
图2a所示为高压断路器合闸前运动拐臂的原始图像,图2b所示为利用Shi-Tomasi强角点检测算法得出的前100个强角点在运动拐臂上的分布情况(红色点表示为强角点)。后期将从其中选取最优位置的强角点进行轨迹跟踪。
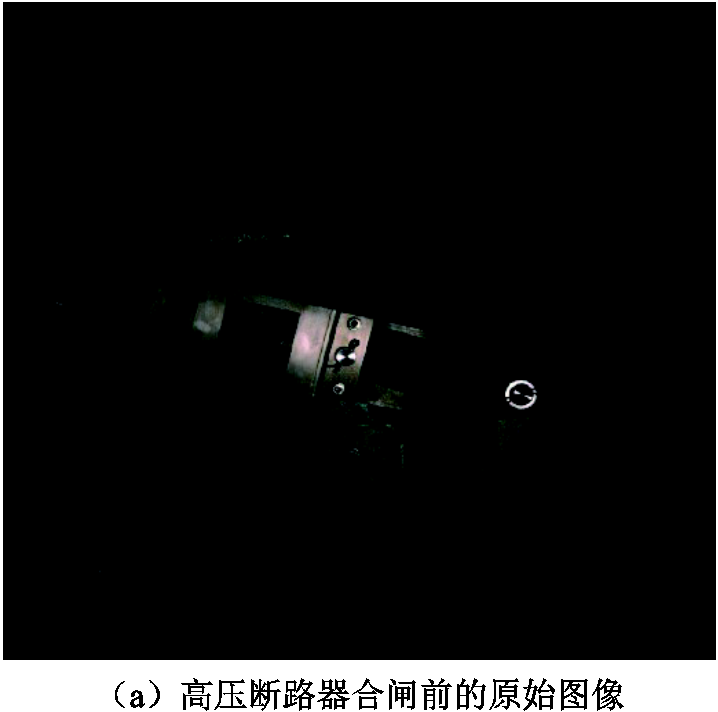
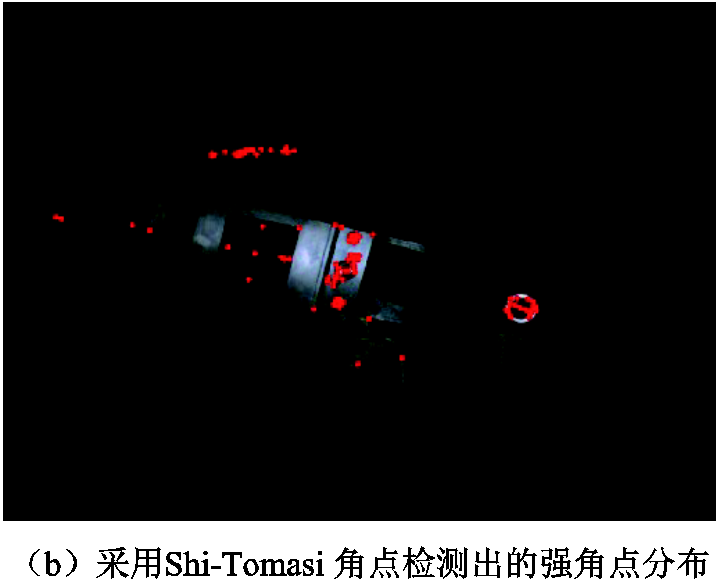
图2 高压断路器的角点检测
Fig.2 Corner detection of HVCB
在机器视觉中,光流算法一般可用于评估两幅连续变化图像之间的形变,而LK光流算法则是最常见的一种。具体来说,该算法在三个假设的基础上进行研究推导:①运动期间像素的灰度值不变;②两幅图像中的像素偏移很小;③与当前帧相邻的像素在下一帧中也应该相邻。
假定t时刻图像上有一灰度值是 的某点
的某点 。以该点的运动过程作为研究对象,在
。以该点的运动过程作为研究对象,在 时刻,该目标点移动到新位置,记为
时刻,该目标点移动到新位置,记为 ,此时的位置灰度表示为
,此时的位置灰度表示为
 ,基于灰度值不变的假设①,计算像素的灰度值为
,基于灰度值不变的假设①,计算像素的灰度值为
 (5)
(5)
根据假设②,式(6)由式(5)右边的泰勒展开式得到,有
 (6)
(6)
结合式(5)和式(6),除以δt,得到光流法的约束条件为
 (7)
(7)
式中,![]() 、
、![]() 分别为被选取角点的像素在水平和垂直方向上的速度;
分别为被选取角点的像素在水平和垂直方向上的速度; 为的偏微分。
为的偏微分。
在根据假设①和假设②得到光流基本约束方程的基础上,根据假设③,Lucas-Kanade光流法在待求解像素周围建立一个N×N的像素块,并得到N2约束方程,有
 (8)
(8)
采用最小二乘法对方程组进行求解。Ux和Uy的计算结果为
 (9)
(9)
LK光流法是一种可以表示图像像素瞬时速度的方法。因此,光流可以很好地描述运动目标的运动特性。
本文主要对断路器的合闸过程进行研究。使用LK光流场算法对目标角点进行轨迹跟踪。光流法可分为稠密光流和稀疏光流两种,二者在跟踪角点的数量上存在较大差异。稠密光流需计算图像中大量像素点的瞬时速度,因此数据量大、计算时间长。为了提高检测效率,本文将采用稀疏光流的采样方法,即只对一个角点进行光流跟踪,因为在同一个机械结构上,一个角点的运动轨迹就完全可以反映出当前断路器的运行状态。但这需要确定一个最优的角点,所以需要对角点的位置进行寻优。
由于现场光线和一些其他环境问题,断路器拐臂在运动过程中部分角点位置的灰度会发生变化,即无法满足LK光流算法的前提条件,导致部分角点无法被正常跟踪,所以需要首先对跟踪失败的角点进行筛选和剔除。然后结合操动机构动作机理和Shi-Tomasi角点检测的识别结果,在拐臂上选出4个具有代表性的角点进行对比。通过对4个角点的轨迹效果进行对比分析,最终选出符合拐臂运动分析的最优特征角点。具体步骤可以描述为:首先输入视频,将第一帧的灰度图像作为输入视频的前序灰度图像,同时创建一个蒙版用来进行运动角点轨迹的绘制。将相邻帧之间的图像和追踪点位置对比,得到输出状态矢量,同时更新上一帧的图像和追踪点位置,之后进行逐帧循环,从而完成所选角点的轨迹抓取,然后得到最后一帧中原视频图像与绘制轨迹的叠加图像,从而形成角点的运动轨迹图像如图3所示。图3a为在拐臂运动前选择的a、b、c、d四个不同位置的角点,图3b为拐臂运动后4个角点的运动轨迹。通过对比后发现,角点a、b、c在整个运动过程中移动距离较小,即运动前后对比差异不够明显,说明选用该3个角点不利于判别其运动状态。对比发现角点d处的前后移动距离最大(移动距离越大,其轨迹蕴含的信息量就越大,就越有利于对其进行故障分析),该点位于高压断路器拐臂与动力装置的连接处,最有利于分析高压断路器的运行状态。所以本文将对角点d产生的运动轨迹进行研究。
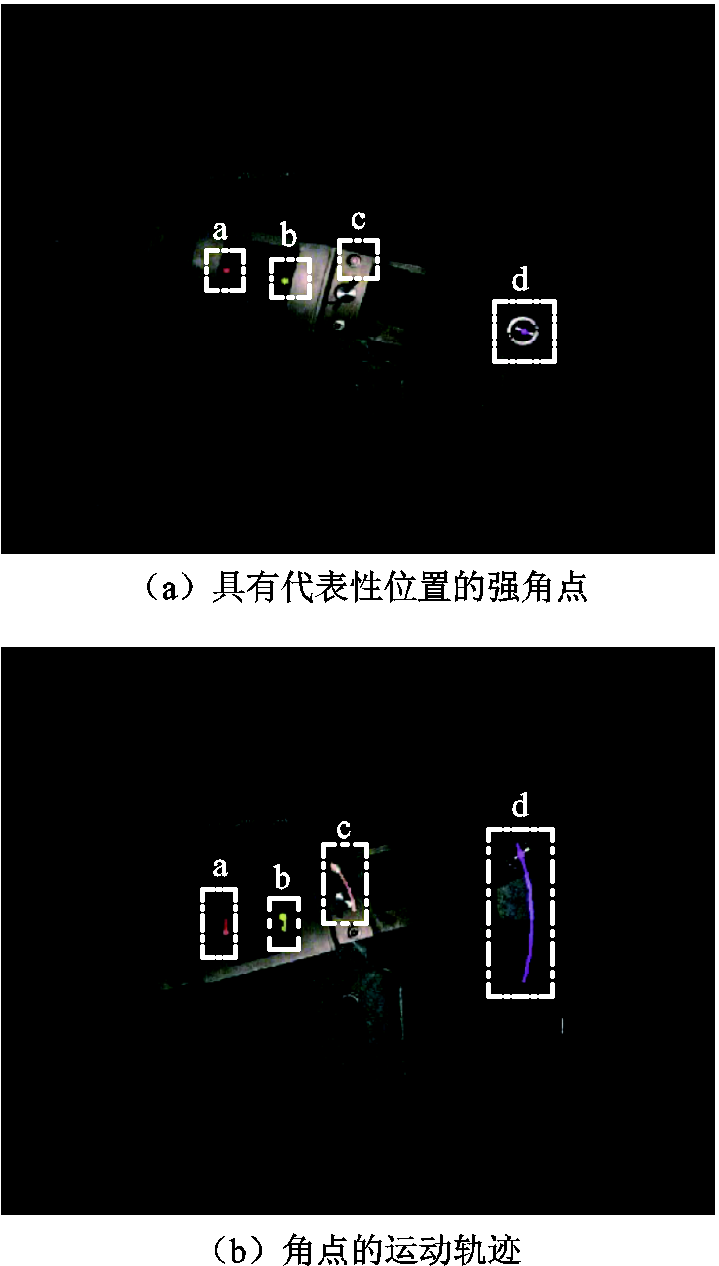
图3 高压断路器合闸前后不同角点轨迹对比
Fig.3 Comparison of different corner points during the closing period of HVCB
由于Shi-Tomasi 角点检测是检测的多个强角点,但是本文只需要对其中一个最优的角点进行跟踪监测,所以后期在对多个视频样本进行分析时只能通过人工使用鼠标定位选取角点的大概位置。由于视频的分辨率为1 024×1 024,即图像的长宽都由1 024个像素组成,而角点对应的只是其中一个像素。那么在对多个视频样本进行特征提取时无法凭借肉眼通过鼠标定位同一个位置的像素(定位同一个角点),这就会导致理论想要选取的角点与实际选取的角点存在位置上的偏差。如果前后定位的角点位置不一致,将会影响到所提取数据的准确性。
本文前后三次人工使用鼠标定位同一个位置的角点(为了避免不同视频样本之间存在的差异,所以在同一个视频样本上进行三次定位),然后对其运动轨迹进行分析。人工手动多次定位同一位置角点行程轨迹曲线的对比如图4所示,三次手动选择的角点分别对应三条运动轨迹。因为是同一个视频样本,所以理想状态下三次选取角点的运行轨迹应该完全重合,但从图4中可以明显看出,其轨迹曲线存在明显差异,且第一次手动定位的角点与第三次手动定位的角点对应的曲线差异最为明显(分别对应图中轨迹1与轨迹2)。由于人为的误差现象,这将会对后期高压断路器的故障判别和寿命评估带来不利的影响。
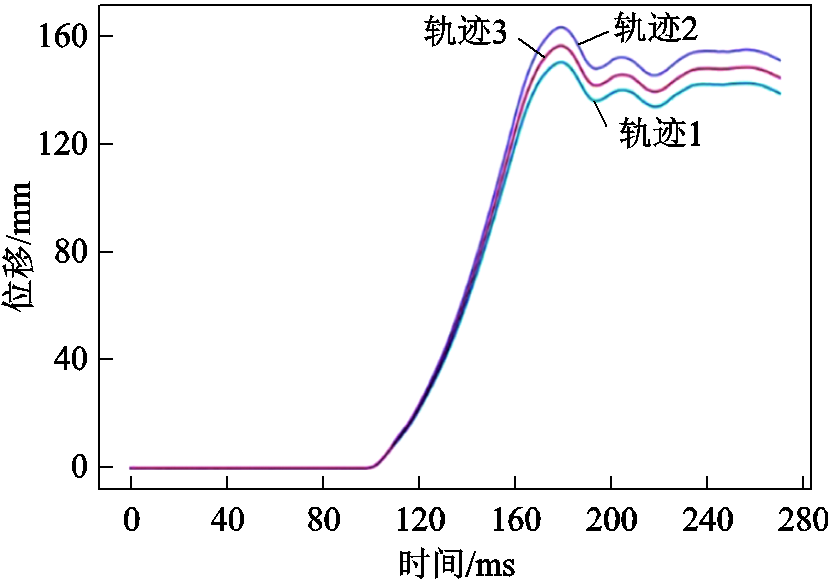
图4 人工手动多次定位同一位置角点行程轨迹曲线的对比
Fig.4 Comparison by manually positioning the corner points at the same position
为了解决手动定位角点带来的偏差问题,本文提出了一种霍夫变换的自动定位角点的方法。因本文定位的最优角点位于运动拐臂与动力装置的链接处,而且角点的外圈为一个圆形,所以就可以利用OpenCV中对应的霍夫变换图像识别算法去识别该圆在整个图像的位置信息,然后间接定位出圆心强角点。自动定位角点流程如图5所示。
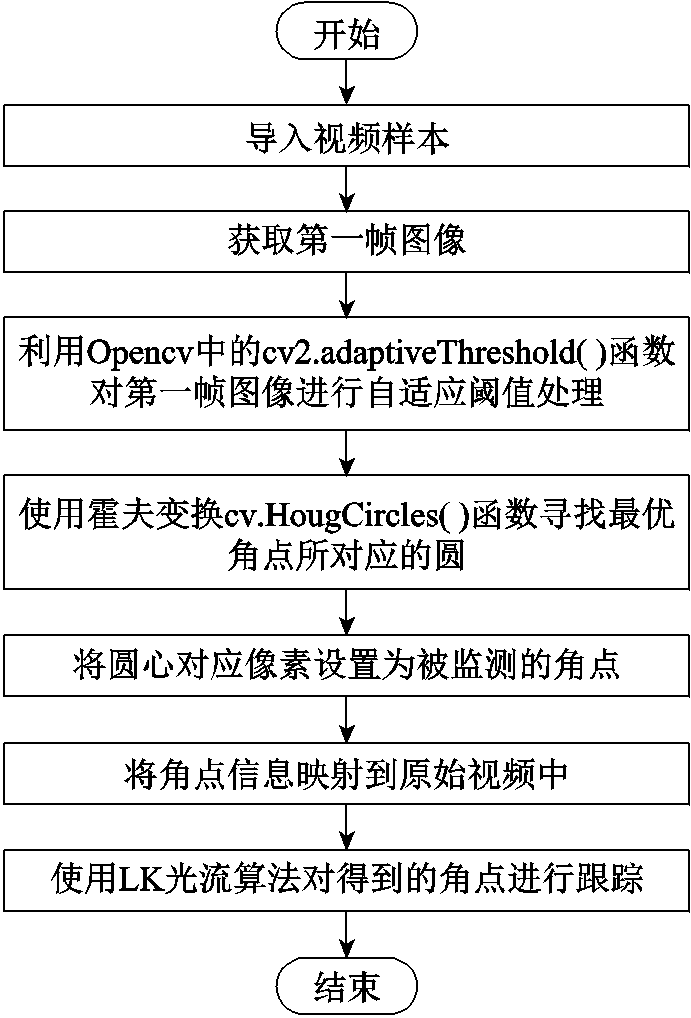
图5 自动定位角点流程
Fig.5 Flow chart of automatic corner location
但由于拐臂末端的连接点处的圆形部件在整体图中的比例太小,且图像的分辨率有限,导致图像边缘轮廓不够明显。拐臂末端局部放大如图6所示,图片的右上角为局部放大图,从放大图可以看出,圆形的边缘轮廓较为模糊,而且圆的外轮廓上存在两处断点情况,这容易导致霍夫变换对该圆的定位不够准确,或者存在无法定位该圆的情况,那么其对应的圆心强角点就无法正确的定位。
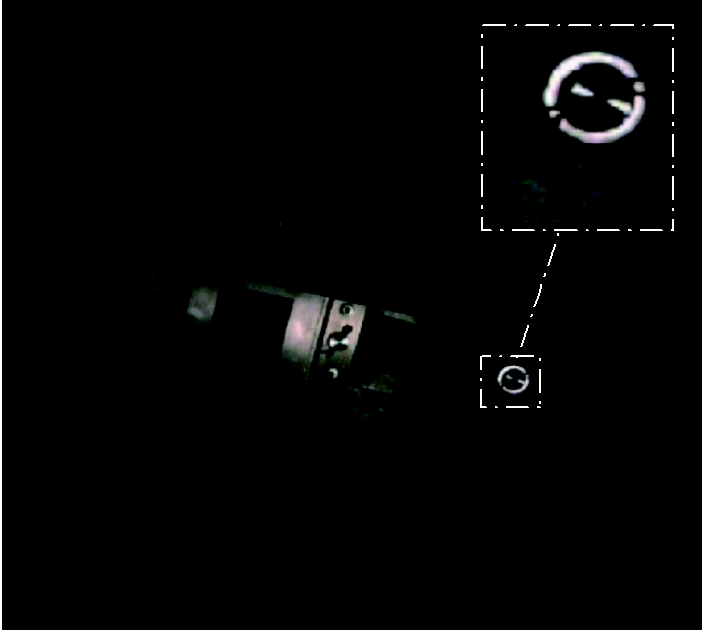
图6 拐臂末端局部放大
Fig.6 The partially enlarged view of the abductor arm
为了解决上述问题,本文首先需要对视频图像进行预处理,并尝试了主流的Canny边缘检测算法与自适应阈值处理,虽然Canny边缘检测算法具有良好的边缘检测精度和信噪比,但是却无法解决圆外侧的断点问题,但自适应阈值处理却可以同时解决以上两种问题。使用基于Python和OpenCV中的cv2. adaptiveThreshold()函数,阈值的最大值设置为255,并使用cv2.ADAPTIVE_THRESH_ GAUSSIAN_C的计算方法,阈值类型为cv2. THRESH_BINARY。所得效果如图7所示,图7a为经过自适应阈值处理后的第一帧图像,通过局部放大图可以看到,圆形轮廓变得更加清晰。霍夫变换算法的功能是识别图像中规则的圆形,图6中白色圆的外轮廓存在断点,即不规则,算法对其容易判断失败。但是经过自适应阈值处理后,将该圆的外轮廓变成黑色(见图7a),此时黑色圆的外轮廓不存在断点。
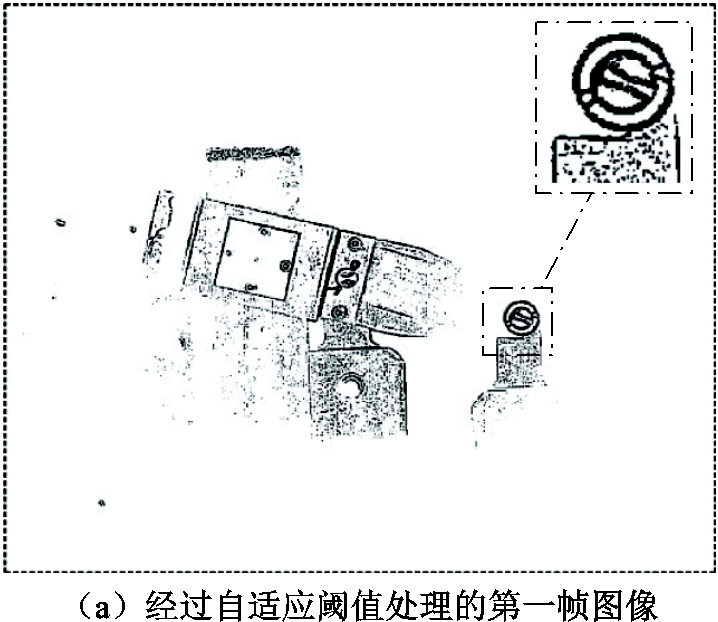

图7 自动定位角点
Fig.7 Automatic positioning of corner points
图7b为使用霍夫变换并经过可视化后的图像,红色圆圈为经过霍夫变换在预处理图像中寻找的目标圆,绿色实心点为自动输出的目标圆对应的圆心,即本文自动定位的最优角点。
然后,将该圆与其圆心的坐标信息映射到原始视频图像中,如图8a为将图7b得到的圆与圆心信息映射到原始图像中得到的效果,图8b为使用LK光流算法对自动获取的角点进行轨迹追踪。
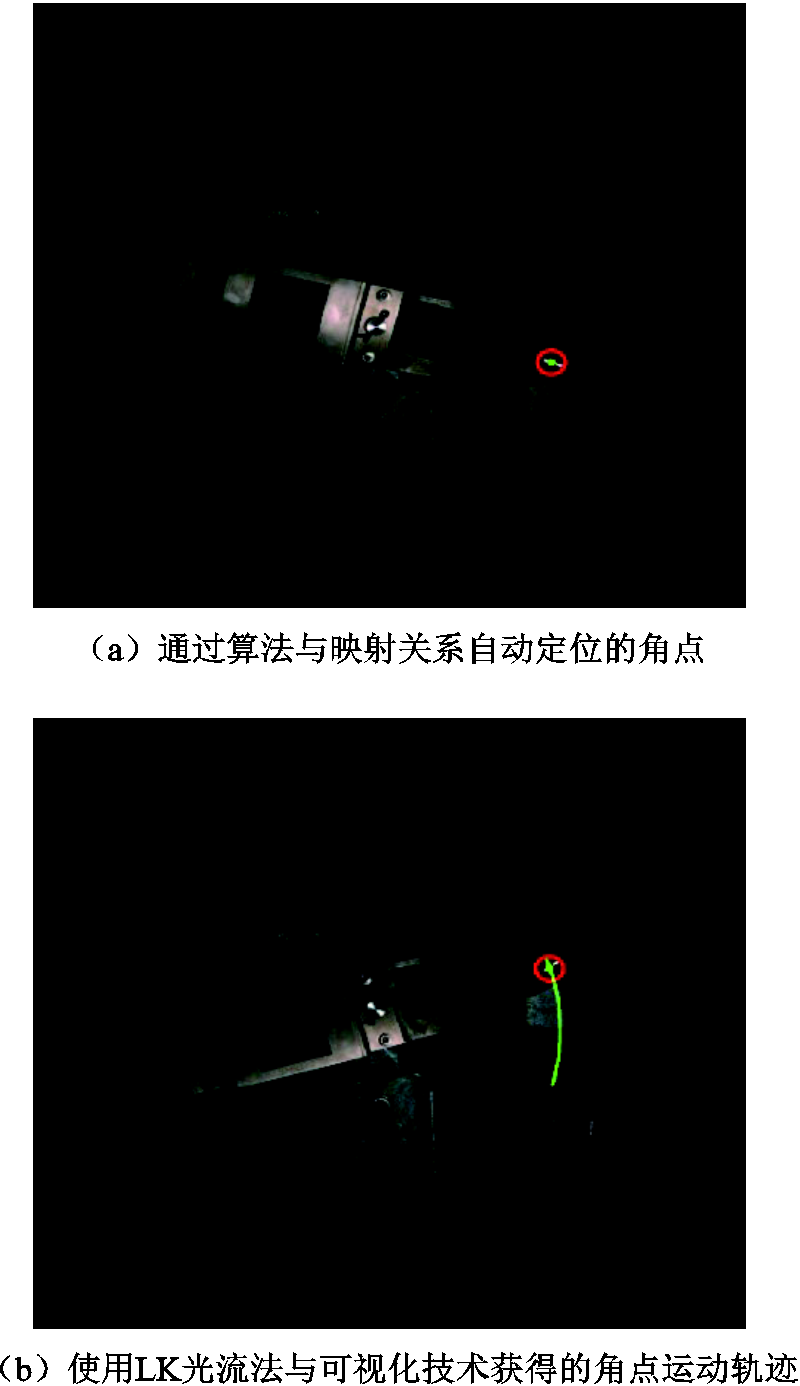
图8 角点的定位与跟踪
Fig.8 Positioning and tracking of corner points
基于机器视觉方法直接输出的是拐臂相关位置在视频样本中移动像素的数量,可测得拐臂实际的运动距离,然后通过比值关系得出单个像素在实际中对应的距离,由上述关系就可以得到角点准确的运动轨迹。
为了验证本文所提自动定位角点方法的有效性,利用该方法三次自动定位同一位置的最优角点。
自动定位角点轨迹误差对比如图9所示,三次自动定位的角点对应的运动轨迹已达到完全重合,且与图4的误差现象形成了鲜明的对比,说明自动定位的角点已经达到了理想的效果,彻底解决了人为定位角点带来的误差现象,证明了本文所提自动定位角点方法的优越性。
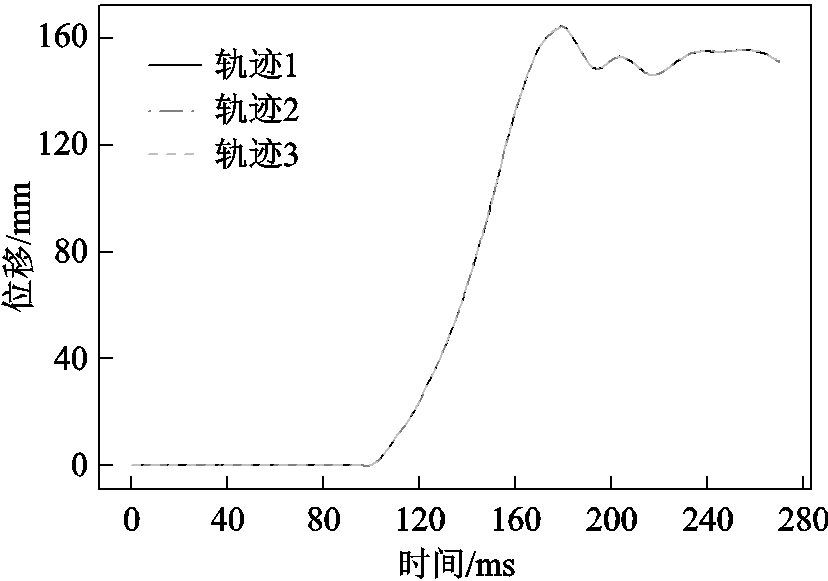
图9 自动定位角点轨迹误差对比
Fig.9 Trajectory error comparison of automatic positioning concer
在传统的方法中,通常会使用加速度传感器来测量目标物体在时间上的位移,并且取得了非常不错的效果[24]。接下来将会使用本文所提出的方法与加速度传感器测量的位移曲线进行对比。本实验采用的加速度传感器,其主要性能参数如下:使用频率范围为1~10 kHz;电荷/电压灵敏度为10 mV/g;共振频率大于等于50 kHz;传感器质量为0.56 g。
在拐臂末端相同位置加装上述加速度传感器,确保传感器的中心位置与本文选择的角点位置重合。实验将采样频率设置为10 kHz,利用加速度传感器得出的加速度信号在时间上的变化,对时域加速度信号进行双重积分,然后重构出位移信号。此外,拐臂下端安装有直线位移传感器。加速度传感器、直线位移传感器和机器视觉方法采集的行程曲线对比如图10所示。
由图10可以明显看出,直线位移传感器测出的行程曲线偏移了其他两种方法所得出的结果,这是因为直线拉杆对其运动干扰较大导致的。由于微型加速度传感器的体积与质量较小,对操动机构的干扰较小。可以看出,加速度传感器与机器视觉测量结果的差异非常小,而且在运动的前180 ms内两者的位移曲线基本吻合。这也证明了本文所提出的方法是完全有效的。
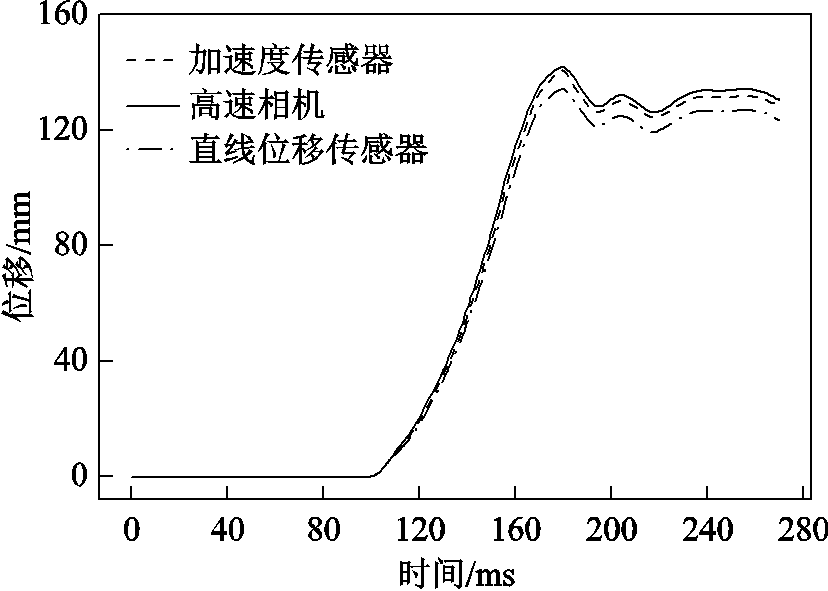
图10 传统传感器与机器视觉的位移曲线对比
Fig.10 Comparison of displacement curves measured by the traditional sensors and the proposed method
高压断路器机械特性测量的最终目的是实现故障的提前诊断和剩余机械寿命的评估,角点选择的不同会影响到机构的机械特性测量。角点选择的影响可以归纳为:
(1)首先选取的角点应为强角点,有利于被后期的算法跟踪,弱角点容易出现中途跟踪失败的情况,也就无法提取出完整的轨迹数据。
(2)角点的运动轨迹要足够长,因为越长的轨迹包含的信息量就越多,较多的信息量可有效提高后期诊断和预测的准确率。
(3)角点位置一旦确定,就要保证在不同状态下提取的所有轨迹数据都为同一位置角点的运动轨迹。后期的故障诊断和寿命评估均需要相关算法从相同位置轨迹中找出细微差别来判断状态,若中途换用其他位置角点的运动轨迹,就无法完成后期的工作。
本文所提方法同样适用于其他高压断路器的机械特征提取。不同型号高压断路器对应的操动机构结构也有所不同,若某一操动机构最佳提取位置不存在强角点,可以通过人工采用无损的方式在最优位置创造一个强角点,例如,采用记号笔在最优位置标记一个点,使该点的颜色与周围形成色差,就可使该位置的图像梯度升高,那么该点就变成了强角点。然后再使用本文所述方法利用霍夫变换对该点进行准确的自动定位,以达到自动提取和测量机械特性的目的。
在高压断路器机械特性监测中,采用接触传感器的侵入式测量方法可能会给其机械部件带来附加质量,影响测量结果。针对上述问题,本文提出了一种基于机器视觉的非接触机械特征测量方法,总结如下:
1)由于图像灰度的原因,导致很多角点无法被准确跟踪。为此,本文提出利用Shi-Tomasi角点检测算法来检测强角点。结果表明,该方法得出的角点都可以被准确地跟踪。
2)人工使用鼠标定位角点位置会产生一些偏差,导致提取数据不准确。为解决该问题,本文提出使用霍夫变换算法代替人工选取角点的方法。该方法可以准确地自动定位角点并提取高压断路器的机械特征,实现数据提取的自动化。
3)采用LK光流场算法对角点进行跟踪,并将轨迹曲线与加速度传感器测量的轨迹曲线进行对比。结果表明,两种方法得到的接触位移具有较高的相似性,验证了本文提出的基于机器视觉方法的有效性。
参考文献
[1] Sun Shuguang, Wen Zhitao, Du Taihang, et al. Remaining life prediction of conventional low-voltage circuit breaker contact system based on effective vibration signal segment detection and MCCAE-LSTM[J]. IEEE Sensors Journal, 2021, 21(19): 21862-21871.
[2] Asghar Razi-Kazemi A, Niayesh K. Condition monitoring of high voltage circuit breakers: past to future[J]. IEEE Transactions on Power Delivery, 2021, 36(2): 740-750.
[3] 陈龙龙, 魏晓光, 焦重庆, 等. 混合式高压直流断路器分断过程电磁瞬态建模和测试[J]. 电工技术学报, 2021, 36(24): 5261-5271. Chen Longlong, Wei Xiaoguang, Jiao Chongqing, et al. Electromagnetic transient modeling and test of hybrid DC circuit breaker[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5261-5271.
[4] Lü Yaqiong, Cao Xiaohua, Zhou Qianwen, et al. Safety and security study for shore power system: state-of-the-art[C]//2020 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Singapore, Singapore, 2021: 1306-1310.
[5] Yan Jing, Wang Yanxin. High-voltage circuit breaker intelligent diagnosis technology for mechanical faults under power internet of things context[C]//2020 IEEE International Conference on High Voltage Engineering and Application (ICHVE), Beijing, China, 2020: 1-4.
[6] Cao Chengcheng, Liu Mingliang, Li Bing, et al. Mechanical fault diagnosis of high voltage circuit breakers utilizing VMD based on improved time segment energy entropy and a new hybrid classifier[J]. IEEE Access, 2020, 8: 177767-177781.
[7] 关永刚, 杨元威, 钟建英, 等. 高压断路器机械故障诊断方法综述[J]. 高压电器, 2018, 54(7): 10-19. Guan Yonggang, Yang Yuanwei, Zhong Jianying, et al. Review on mechanical fault diagnosis methods for high-voltage circuit breakers[J]. High Voltage Apparatus, 2018, 54(7): 10-19.
[8] Zhang Jianzhong, Wu Yongbin, Xu Zheng, et al. Fault diagnosis of high voltage circuit breaker based on multi-sensor information fusion with training weights[J]. Measurement, 2022, 192: 110894.
[9] Wan Shuting, Chen Lei. Fault diagnosis of high-voltage circuit breakers using mechanism action time and hybrid classifier[J]. IEEE Access, 2019, 7: 85146-85157.
[10] Lin Lin, Wang Bin, Qi Jiajin, et al. A novel mechanical fault feature selection and diagnosis approach for high-voltage circuit breakers using features extracted without signal processing[J]. Sensors, 2019, 19(2): 288.
[11] 杨秋玉, 王栋, 阮江军, 等. 基于振动信号的断路器机械零部件故障程度识别[J]. 电工技术学报, 2021, 36(13): 2880-2892. Yang Qiuyu, Wang Dong, Ruan Jiangjun, et al. Fault severity estimation method for mechanical parts in circuit breakers based on vibration analysis[J]. Transactions of China Electrotechnical Society, 2021, 36(13): 2880-2892.
[12] 马速良, 武建文, 袁洋, 等. 多振动信息下的高压断路器机械故障随机森林融合诊断方法[J]. 电工技术学报, 2020, 35(增刊2): 421-431. Ma Suliang, Wu Jianwen, Yuan Yang, et al. Mechanical fault fusion diagnosis of high voltage circuit breaker using multi-vibration information based on random forest[J]. Transactions of China Electrotechnical Society, 2020, 35(S2): 421-431.
[13] 豆龙江, 何玉灵, 万书亭, 等. 基于振动信号的高压断路器弹簧疲劳程度检测方法[J]. 电工技术学报, 2022, 37(24): 6420-6430. Dou Longjiang, He Yuling, Wan Shuting, et al. Detection method of spring fatigue degree of high voltage circuit breaker based on vibration signal[J]. Transactions of China Electrotechnical Society, 2022, 37(24): 6420-6430.
[14] 赵书涛, 许文杰, 刘会兰, 等. 基于振动信号谱形状熵特征的高压断路器操动状态辨识方法[J]. 电工技术学报, 2022, 37(9): 2170-2178. Zhao Shutao, Xu Wenjie, Liu Huilan, et al. Operating state identification method of high voltage circuit breaker based on shape entropy characteristics of vibration signal spectrum[J]. Transactions of China Electrotechnical Society, 2022, 37(9): 2170-2178.
[15] 刘会兰, 许文杰, 赵书涛, 等. 面向高压断路器故障分类的电流-振动信号类聚几何敏感特征优选方法[J]. 电工技术学报, 2023, 38(1): 26-36. Liu Huilan, Xu Wenjie, Zhao Shutao, et al. Optimization method of clustering geometric sensitive features of current-vibration signals for fault classification of high-voltage circuit breakers[J]. Transactions of China Electrotechnical Society, 2023, 38(1): 26-36.
[16] 杨秋玉, 阮江军, 张灿, 等. 基于定量递归分析的高压断路器机械缺陷辨识及应用[J]. 电工技术学报, 2020, 35(18): 3848-3859. Yang Qiuyu, Ruan Jiangjun, Zhang Can, et al. Study and application of mechanical defect identification for high-voltage circuit breakers using recurrence quantification analysis[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3848-3859.
[17] 仲林林, 胡霞, 刘柯妤. 基于改进生成对抗网络的无人机电力杆塔巡检图像异常检测[J]. 电工技术学报, 2022, 37(9): 2230-2240, 2262. Zhong Linlin, Hu Xia, Liu Keyu. Power tower anomaly detection from unmanned aerial vehicles inspection images based on improved generative adversarial network[J]. Transactions of China Electrotechnical Society, 2022, 37(9): 2230-2240, 2262.
[18] 宋立业, 刘帅, 王凯, 等. 基于改进EfficientDet的电网元件及缺陷识别方法[J]. 电工技术学报, 2022, 37(9): 2241-2251. Song Liye, Liu Shuai, Wang Kai, et al. Identification method of power grid components and defects based on improved EfficientDet[J]. Transactions of China Electrotechnical Society, 2022, 37(9): 2241-2251.
[19] 王立军, 张拓, 刘光伟, 等. 基于机器视觉技术的高压断路器机械特性诊断[J]. 高电压技术, 2020, 46(6): 2148-2154. Wang Lijun, Zhang Tuo, Liu Guangwei, et al. Diagnostics on mechanical characteristics of high voltage circuit breaker based on machine vision technology[J]. High Voltage Engineering, 2020, 46(6): 2148-2154.
[20] 邓金秋, 张国钢, 耿英三, 等. 基于机器视觉的高压断路器速度特性测量方法研究[J]. 高压电器, 2018, 54(7): 189-194, 199. Deng Jinqiu, Zhang Guogang, Geng Yingsan, et al. Study on measurement method of speed characteristic of high voltage circuit breaker based on machine vision[J]. High Voltage Apparatus, 2018, 54(7): 189-194, 199.
[21] Algethami N, Redfern S. Combining accumulated frame differencing and corner detection for motion detection[C]//Proceedings of the Conference on Computer Graphics & Visual Computing, Guangzhou, China, 2018: 7-14.
[22] Bansal M, Kumar M, Kumar M, et al. An efficient technique for object recognition using Shi-Tomasi corner detection algorithm[J]. Soft Computing, 2021, 25(6): 4423-4432.
[23] Wang Changjie, Nian Hua. Algorithm of remote sensing image matching based on corner-point[C]//2017 International Workshop on Remote Sensing with Intelligent Processing (RSIP), Shanghai, China, 2017: 1-4.
[24] Han Sangbo. Measuring displacement signal with an accelerometer[J]. Journal of Mechanical Science and Technology, 2010, 24(6): 1329-1335.
Abstract High voltage circuit breaker (HVCB) is the key control and protection equipment in the power system. Accurate measurement of HVCB mechanical characteristics is a prerequisite for fault diagnosis and life prediction. Currently, several measurement methods using contact sensors have been proposed to extract the mechanical characteristics of HVCB. Contact sensors are mounted on the kinematic structure of the circuit breaker to extract the mechanical characteristics. However, the mounting imposes additional mass on the kinematic mechanism to interfere with its normal operation, and some mounting methods can cause damage to the HVCB. In response to the above problem, an improved method for tracking target trajectories based on machine vision with the optical flow is proposed in the presented paper. A high-speed camera is used to photograph the high-voltage circuit breaker operating mechanism, and then relevant information is extracted from the high-frame-rate video samples using relevant image processing algorithms.
Firstly, the crank arm of the HVCB operating mechanism is photographed by using a high-speed camera (4kHz and 1080*1080). Because of the great advantage of tracking individual target points and can effectively reduce computational effort, Lucas-Kanade (LK) optical flow method is introduced to track and monitor the target points in the video. However, the following problems are prone to occur in the data extraction process: (1) Since optical flow tracking is based on image grayscale changes, the target points in the image with weak grayscale changes cannot be tracked accurately. (2) The analysis of multiple video samples requires excessive reliance on the manual positioning of target corner points at the same location, which is prone to errors and increases the workload of the experimenters. To solve the above problem, the Shi-Tomasi corner detection algorithm is applied to filter out the strong corner points in the image that can be easily tracked, and find an optimal corner point from them for later optical flow tracking. The selection of the optimal corner point requires that its motion trajectory be relatively long, because the longer the trajectory the more information it contains. Then the Hough transform algorithm with the adaptive thresholding technique in OpenCV is used to automatically locate the target corner points. In OpenCV, CV2.adaptiveThreshold() function is applied, the maximum value of the threshold is set to 255, and the threshold type is set to CV2.THRESH_BINARY. This method does not require manual participation in the process of mechanical feature extraction, which can effectively avoid the error brought by manually. Finally, the proposed method is compared with the displacement curves measured by acceleration and displacement sensors, and the results indicate that the proposed method is completely effective.
The following conclusions can be drawn from the mechanical characteristics of HVCB extracted by the proposed method. (1) To solve the problem that some target points cannot be tracked, the Shi-Tomasi algorithm is applied to first filter the strong corner points that can be tracked. The results show that all the corner points derived from this method can be tracked accurately. (2) The use of the Hough transform algorithm can replace the manual positioning of target points, which can effectively reduce error and increase efficiency.
keywords:High voltage circuit breaker, machine vision, Hough transform, Lucas-Kanade optical flow method
DOI:10.19595/j.cnki.1000-6753.tces.L10106
中图分类号:TM51
山东省自然科学基金项目(ZR2021QE289)和电力设备电气绝缘国家重点实验室项目(EIPE22201)资助。
收稿日期 2023-02-01
改稿日期 2023-02-22
刘亚魁 男,1990年生,副教授,研究方向为输变电设备状态评估。E-mail:liuyakui@qut.edu.cn(通信作者)
李红运 男,1996年生,硕士研究生,研究方向为故障诊断。E-mail:1094584155@qq.com
(编辑 崔文静)