图1 换流变压器广场区域
Fig.1 Converter transformer square area
摘要 针对换流变压器上层存在巡视盲区的问题,拟采用无人机进行巡检,但换流变压器区域复杂的电磁环境可能使无人机受到干扰而失控,需规划安全的巡检路径。为此,该文根据某换流站实际布置和设备尺寸建立换流变压器广场区域三维模型,利用有限元法计算空间电磁场分布。基于无人机可承受的安全阈值,并结合盲区需要巡检的部位,规划路径如下:无人机由隔离墙外起飞,在靠近阀厅侧的小电场强度区域进入变压器巡检区域,下降至巡检高度后依次对大储油柜、高压套管、小储油柜、压力释放阀和在线滤油机进行巡检。路径上的最大电场强度为27 kV/m,最大磁感应强度为60 μT,均小于安全阈值。最后,根据规划路径进行实地飞行测试,可安全稳定地完成巡检作业。
关键词:换流变压器 无人机巡检 电磁场分布 路径规划
换流变压器是直流系统的重要设备,需要对其进行定期巡检[1-2]。换流变压器体积庞大,受视角影响,人工巡检难以对设备上层部件进行巡视,并且隔离墙上安装的摄像头角度较为固定,设备间易相互遮挡,部分关键部位难以监测[3-4]。而无人机(Unmanned Aerial Vehicle, UAV)可进行高空巡视、操作性高、灵活性好,能有效地弥补人工巡检的不足,解决高层设备巡视盲区,大幅提高巡检质量和效率[5-7]。但是,换流变压器区域复杂的电磁环境可能会使无人机受到干扰而失控,从而造成安全事故。因此,需对无人机巡检作业的飞行路径进行规划,保证无人机安全、高效地完成巡检。
换流变压器广场区域和变电站等设备环境复杂,无法直接测量其整体的电磁场分布。目前,国内外学者对于换流站、变电站等电磁环境的分析主要是通过建立整体模型进行数值计算[8-11],而且利用电磁场仿真计算输电线路附近的电磁场分布进行无人机巡检路径和方案的规划已经较为成熟,研究人员可通过无人机巡检安全距离实验和电磁场仿真研究无人机作业最小安全距离,保障无人机巡检作业的安全可靠[12-18]。高旭东[19]通过建立500 kV和750 kV的交流输电线路有限元仿真模型,计算得到无人机与500 kV输电线路的安全作业距离为0.9 m,与750 kV输电线路的安全作业距离为1.2 m。刘壮等[20]通过对小型旋翼无人机巡检安全距离试验研究,得到±500 kV直流输电线路(输送电流为3 kA时)直线塔无人机巡检作业最小安全距离为3 m。输电线路设备相对独立,周围空间较为空旷,而变电站和换流站区域设备密集,高压设备间距离有限,目前对于变电站和换流站的无人机巡检开展较少。
换流站中换流变压器区域设备复杂,安全间隔较小,无人机巡检主要考虑减小无人机体积以及更精确的无人机定位和控制。目前,电力巡检应用的无人机以多旋翼无人机为主,多旋翼无人机按机身体积可分为大型多旋翼无人机、中型多旋翼无人机和小型多旋翼无人机[21]。鉴于小型多旋翼无人机体积小、飞行稳定、能够悬停等特点,可以将小型多旋翼无人机应用在较狭小的环境中[22-23],在其机身上搭载实时动态(Real-Time Kinematic, RTK)载波相位差分定位系统,能够精准确定位置,精度可达cm级,确定航迹点即可实现无人机自主巡检飞行,使设备密集区域的巡检具有可行性[24]。巡检安全路径的确定成为关键,换流变压器区域电磁环境复杂,需要结合仿真计算结果和无人机的耐受电磁场阈值,规划安全路径。
为此,本文根据换流站中换流变压器区域的实际尺寸和结构建立500 kV换流站中换流变压器的三维仿真模型,对该区域空间电磁场进行仿真计算,基于无人机可承受的安全阈值,分析无人机巡检作业的安全区域,并根据无人机重点巡视部位进行巡检点和路径规划,最后根据规划的巡检路径开展实地飞行测试实验。
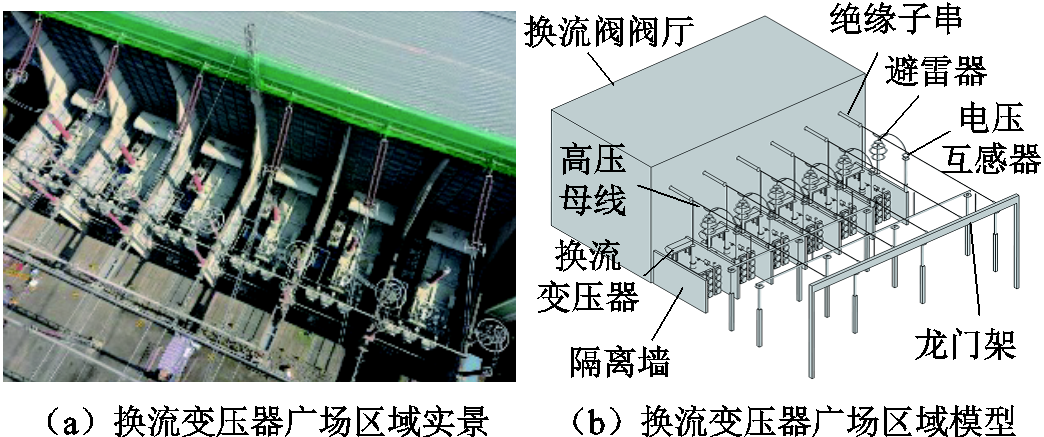
某500 kV换流站内换流变压器广场区域实景如图1a所示,主要构筑物和设备包括:阀厅及换流变压器防火墙、换流变压器本体及其附件、换流变压器进线构架、噪声隔离墙、避雷器、电压互感器、中性点连接线、三相进线等。建立换流变压器广场区域整体三维模型,如图1b所示。主要包括六台换流变压器、隔离墙、避雷器、换流阀阀厅、龙门架、金具等,换流变压器箱体的长、宽、高分别为9 704、3 744、4 700 mm;龙门架的宽和高分别为52 000 mm和20 000 mm;大储油柜的长、宽、高分别为4 600、2 490、2 985 mm;高压套管的直径和高度分别为1 200 mm和4 900 mm;小储油柜的长、宽、高分别为1 000、600、900 mm;压力释放阀的长、宽、高分别为408、301、150 mm;在线滤油机的直径和高度分别为406 mm和504 mm。由于主要分析空间电磁场,在不影响变压器区域电磁场分布的前提下对部分金具进行简化处理。
图1 换流变压器广场区域
Fig.1 Converter transformer square area
根据各设备结构大小控制不同的剖分尺寸,同时在独立设备外和细导线外建立包围设备的空气域用于剖分控制,部分设备模型剖分如图2所示。换流站的双极输送容量为3 000 MW,变压器交流输入端的电压等级为500 kV。因此,对换流变压器高压母线分别施加相位相差120°的三相交流电压和电流,对龙门架、避雷器、地面、外部空气边界和低压端金具等施加零电位。三相电压和电流在不同时刻产生的空间电磁场分布有差异,为此分别在不同相位时进行仿真分析。
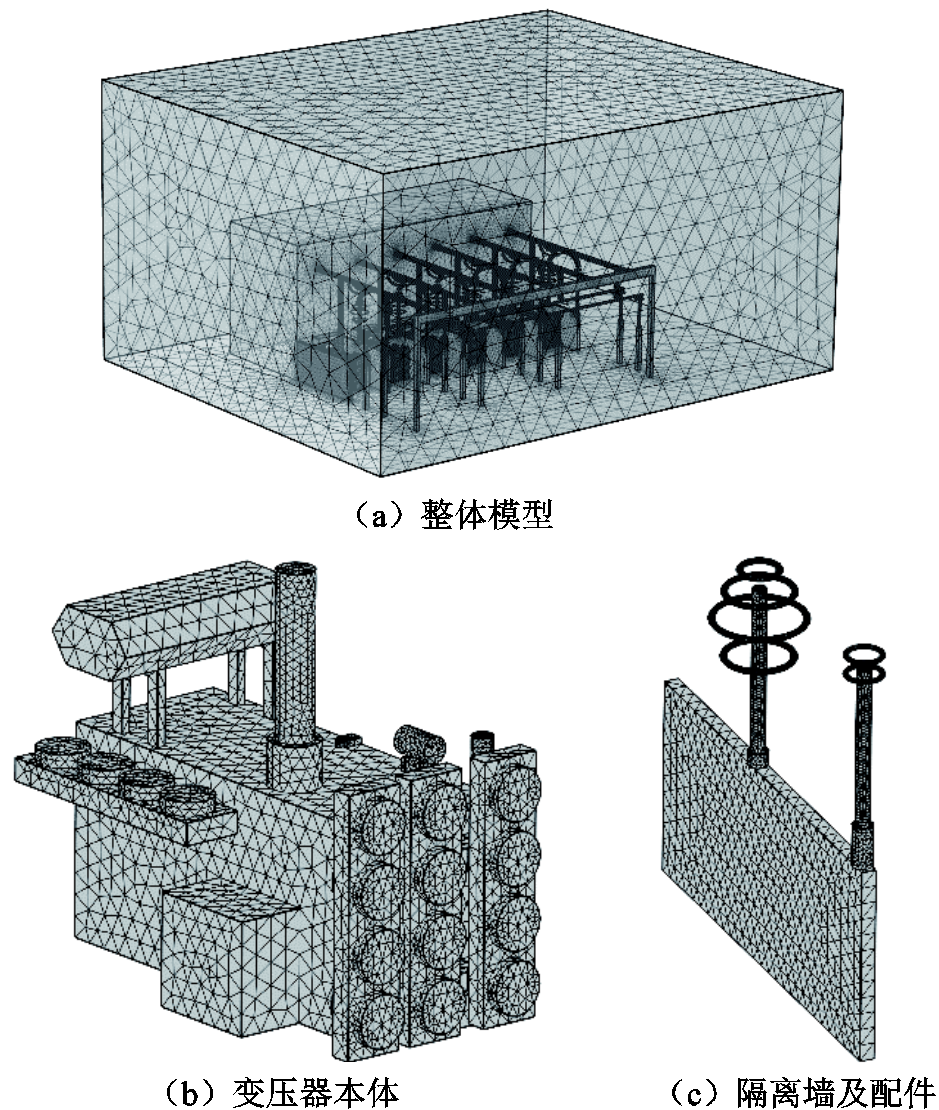
图2 模型剖分
Fig.2 Model partitioning
对比周期内不同时刻的电磁场计算结果,某一相导线电压或电流幅值最大时其附近电磁场幅值也最大。下文以最右边C相幅值最大时为例分析空间电磁场分布特性。
分别对变压器上方和高压母线上方的电场分布进行计算,结果如图3所示。由图3a和图3b可知,当高度较低位于变压器附近时,电场主要集中在高压套管附近;由图3c和图3d可知,当高度较高位于导线附近时,电场主要集中在高压母线附近。阀厅与高压母线间的绝缘子串附近的电场强度较小。因此,分别以高压套管和高压母线附近的电场强度最大点作为基准点,计算它们附近的电场强度,以分析无人机与高压套管和高压母线的电场安全距离,计算结果如图4所示。由图4可知,随着高度的不断增加,高压套管附近的电场强度呈现先增加后减小再增大再减小的趋势,与高压套管附近的导线布置相关;高压母线附近的电场强度则是随着高度增加先增大后减小,与高压母线的距离越远,电场强度越小。
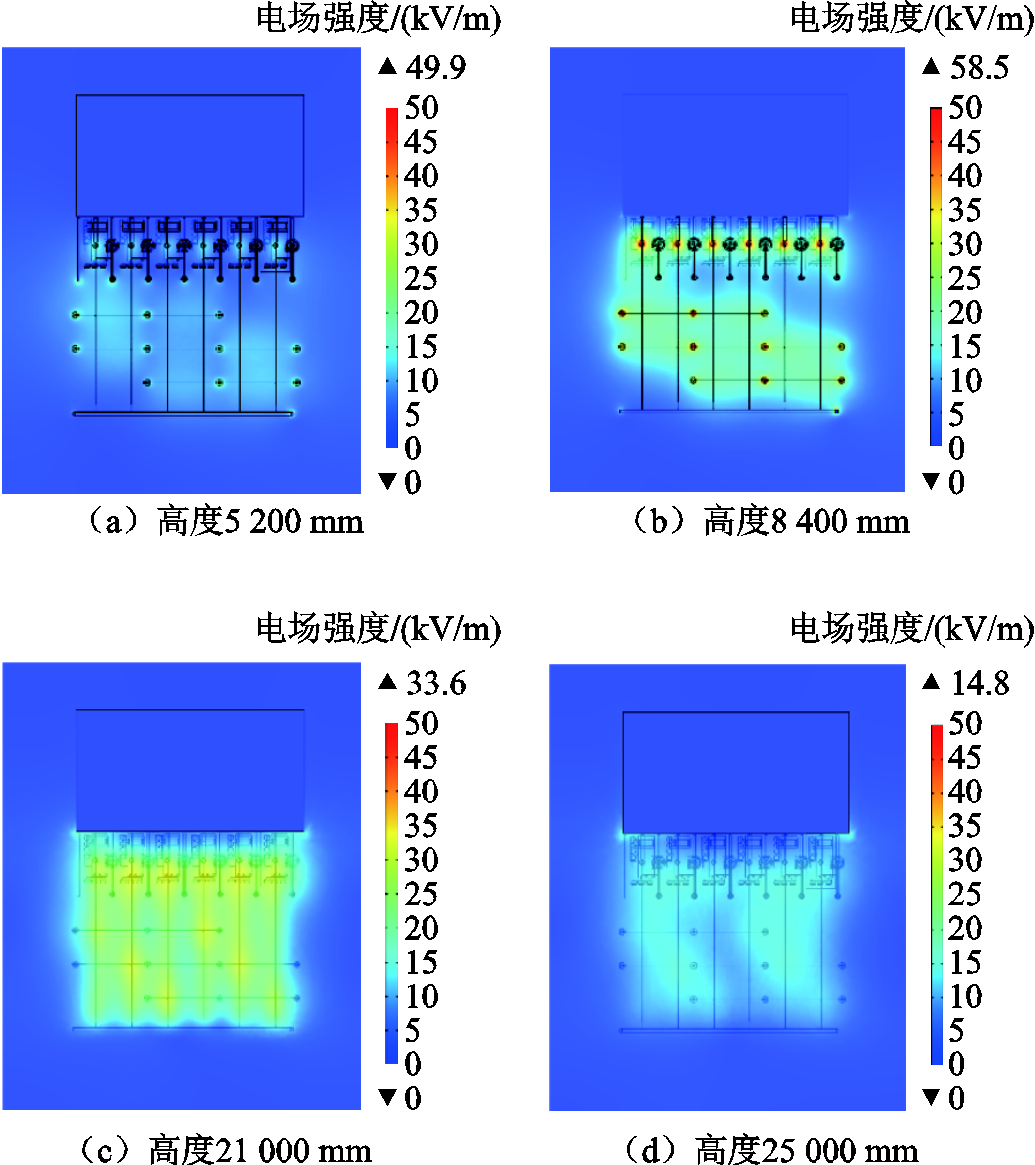
图3 换流变压器上方不同高度电场分布
Fig.3 Electric field distribution at different heights above converter transformers
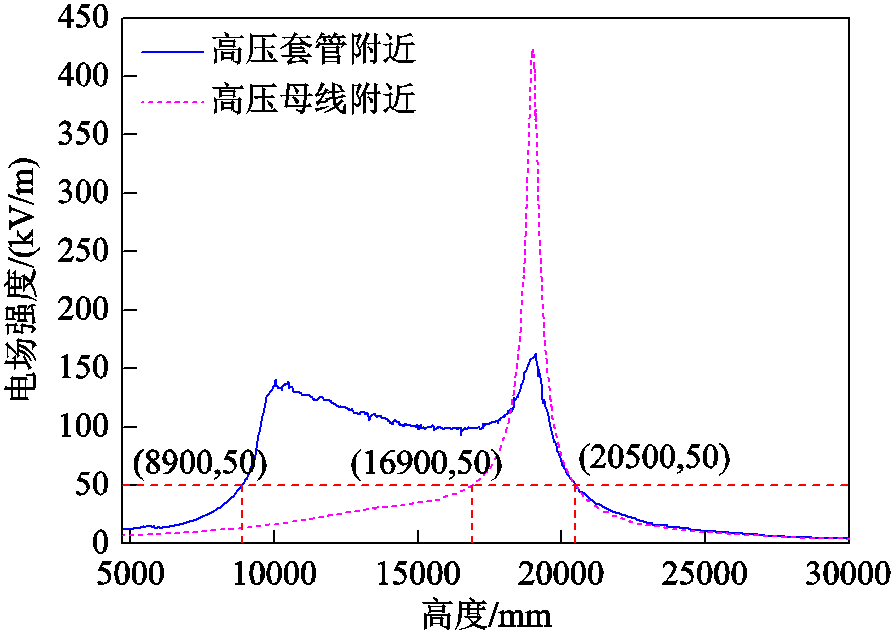
图4 高压套管和高压母线附近电场强度随高度的变化
Fig.4 Variation of electric field strength with height near high voltage bushing and busbar
对于组成无人机飞控系统和巡检系统的电子元器件,传感器的调理电路、保护电路在正常工作下所能抗电磁干扰的最大电场强度一般为50 kV/m,最大磁感应强度为100 μT[20]。在实验室进行无人机电磁场耐受试验测试得到,无人机与均压环发生放电时的平均击穿场强约为930 kV/m,磁感应强度达到370 μT以上时无人机的控制会受到影响。考虑到无人机的悬停精度和悬停位置可能会有一定的偏移,为保证巡检的绝对安全,本文以50 kV/m和100 μT作为安全区域的限值。由图4可知,在高度小于8 900 mm时和大于20 500 mm时,电场强度均小于50 kV/m。电场强度最大值出现在高压母线所在平面,高度为19 000 mm。因此,无人机与高压套管高压端的最小电场安全距离为700 mm,与高压母线的最小电场安全距离为1 500 mm。
换流变压器上方不同高度的磁场分布如图5所示。变压器附近的磁场主要集中在高压套管附近;导线上空的磁场主要集中在高压母线附近;阀厅与高压母线间的绝缘子串附近的磁感应强度较小。分别对不同高度时高压套管和高压母线附近的磁场进行计算,以分析无人机与高压套管和高压母线的磁场安全距离,计算结果如图6所示。
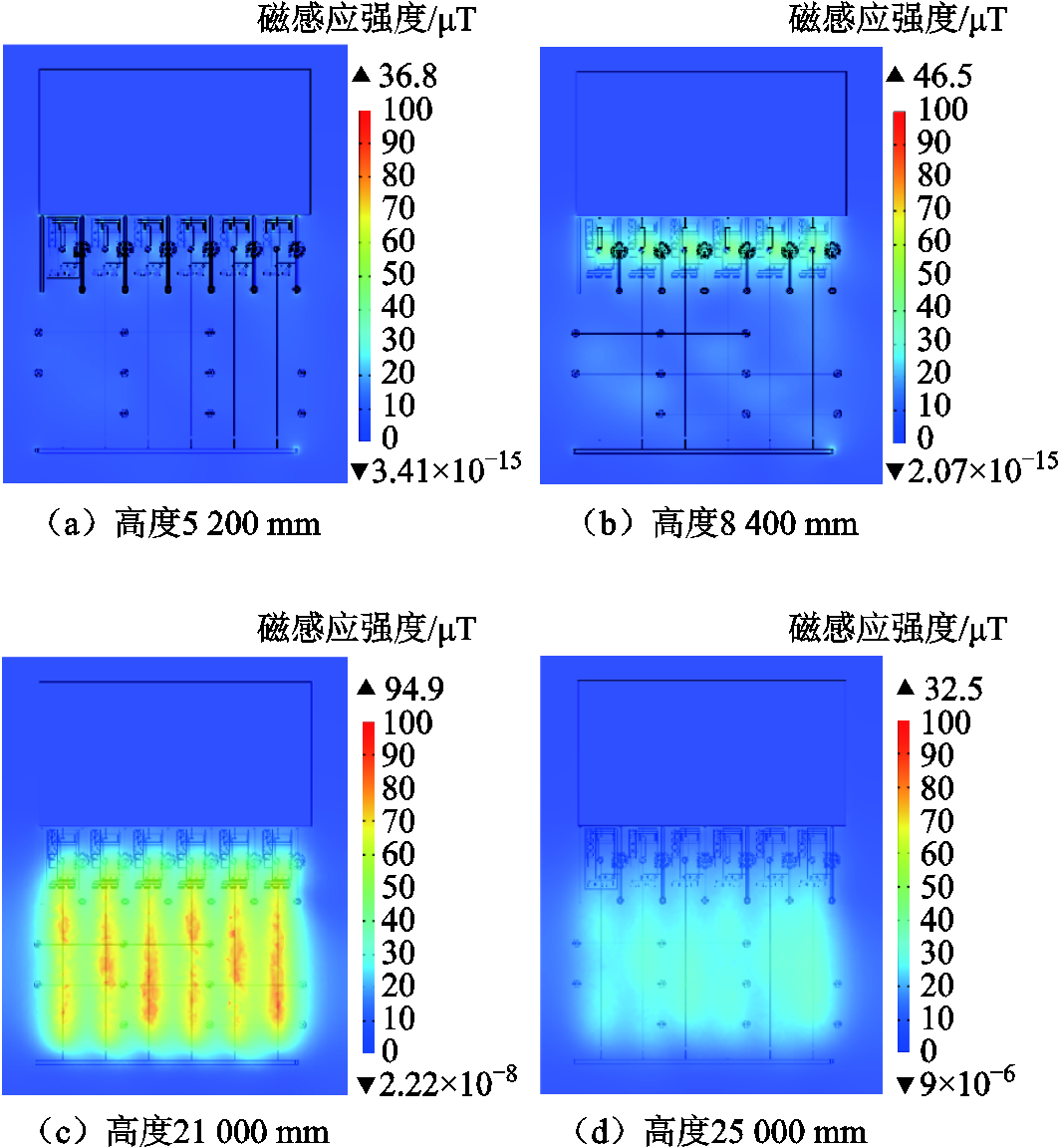
图5 换流变压器上方不同高度磁场分布
Fig.5 Magnetic field distribution at different heights above converter transformers
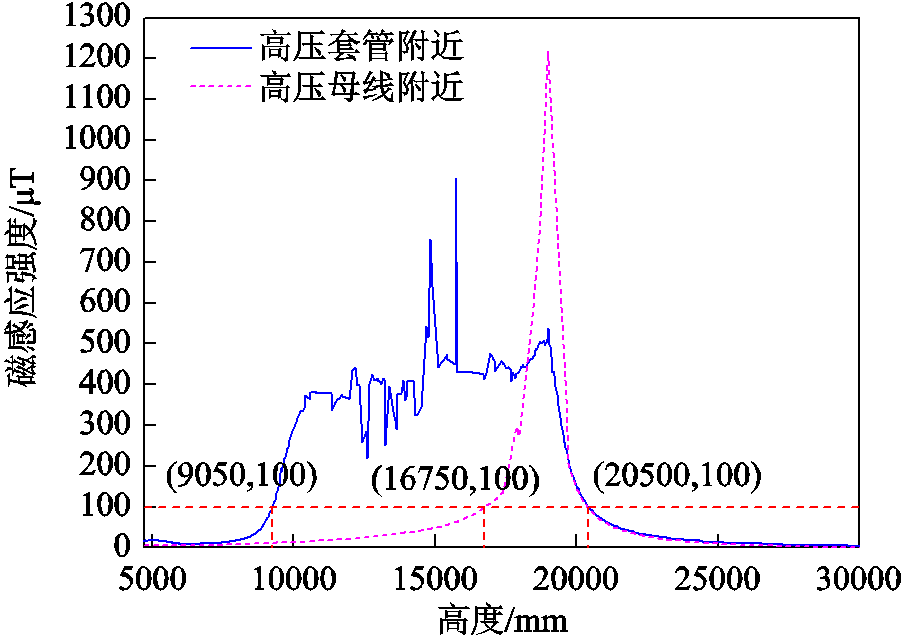
图6 高压套管和高压母线附近磁感应强度随高度的变化
Fig.6 Variation of magnetic field strength with height near high voltage bushing and busbar
由图6可知,随着高度的不断增加,高压套管附近的磁感应强度呈现先增加后振荡变化再减小的趋势;高压母线附近的磁感应强度则呈现先增大后减小的趋势。在高度小于9 050 mm和大于20 500 mm时,磁感应强度均小于100 μT。磁感应强度最大值同样出现在高压母线所在平面。因此,无人机与高压套管的最小磁场安全距离为550 mm,与高压母线的最小磁场安全距离为1 500 mm。
综上所述,电场和磁场主要集中在高压套管和高压母线附近,随着距两者距离的增加,电磁场强度逐渐减小。电场和磁场最大值均位于高压母线处,绝缘子串附近的电场和磁场分布较小。在高度小于8 900 mm和大于20 500 mm时,电场强度均小于50 kV/m,磁感应强度均小于100 μT,满足无人机正常运行所能承受的电场和磁场安全阈值。
根据换流站变压器的巡检作业需求和工作环境,选用四旋翼无人机,其机体尺寸较小,悬停精度高,可用于较狭窄环境的飞行作业。无人机展开尺寸为480 mm×570 mm×150 mm。
结合Q/GDW 10333—2016《±800 kV直流换流站运行规程》相关规定,考虑其中换流变压器的巡视盲区,设定无人机对换流变压器的巡检项目如下:①大储油柜的指示仪表是否正确;②储油柜、套管和法兰等处有无漏油痕迹;③压力释放装置是否完好;④滤油装置压力表指示是否正常等。因此,无人机需对大储油柜、高压套管、小储油柜、压力释放阀和在线滤油机进行巡检。
换流变压器上需要进行巡检的实物布置如图7a所示,A点为大储油柜指示仪表、B点为高压套管、C点为压力释放阀、D点为小储油柜、E点为在线滤油机。考虑换流变压器待巡检设备的各仪表分布位置和角度,无人机需下降至高压套管下方进行作业。换流变压器区域的空间较为狭窄,在进行巡检作业时,应尽量减少无人机姿态的调整,通过在巡检路径中调整云台角度对各巡检设备进行拍照。本文共选取六个巡检点分别对大储油柜、高压套管、小储油柜、压力释放阀和在线滤油机进行巡检,巡检点如图7b所示。点①和点⑥为高压套管的巡检点,对套管的漏油情况进行巡检;点②为大储油柜的巡检点,对大储油柜是否漏油和仪表指示情况进行巡检;点③为压力释放阀的巡检点,检查其有无被冲破;点④为小储油柜的巡检点,检查其有无漏油情况;点⑤为在线滤油机的巡检点,检查其压力表指示是否正常。
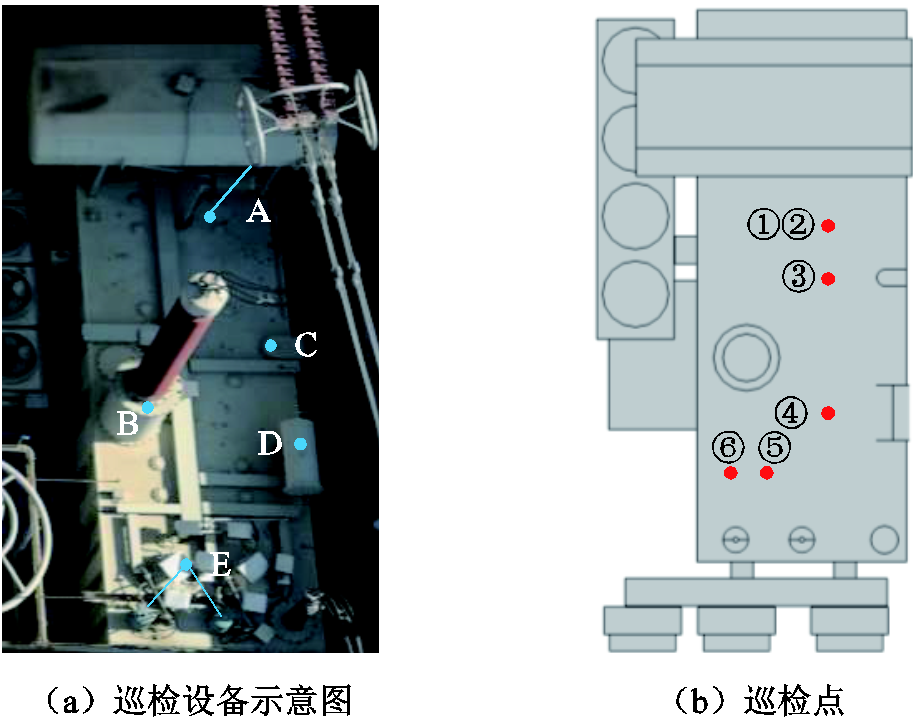
图7 换流变压器巡检设备和巡检点
Fig.7 Equipment on converter transformer that needs patrol inspection
无人机自主航迹巡检需要确定各巡检位置的悬停坐标。根据无人机电力巡检标准可知,无人机近距离巡检时的飞行速度应小于1 m/s,考虑换流变压器区域空间较为狭窄,飞行速度限制在0.5 m/s,该速度下测试无人机刹停所需距离不超过50 mm,而该无人机的水平和垂直定位精度偏差小于100 mm;高压系统瞬时故障切除时间一般为几十毫秒[25],故障时可能影响无人机控制,考虑切除时间和恢复时间,将偏移裕度设为250 mm,总偏移约为400 mm;考虑裕度后无人机悬停点及连接路径距各设备的距离至少大于1 m;进一步综合电场和磁场限值并考虑尽量采用直线路径,选择巡检点坐标信息见表1。
表1 各巡检点坐标
Tab.1 Patrol point coordinate
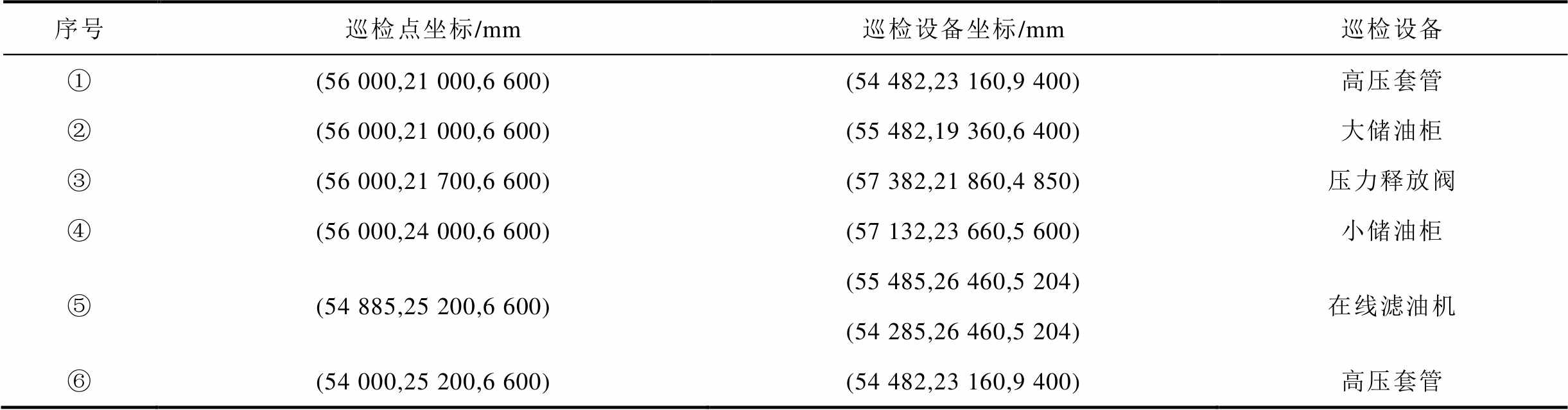
序号巡检点坐标/mm巡检设备坐标/mm巡检设备 ①(56 000,21 000,6 600)(54 482,23 160,9 400)高压套管 ②(56 000,21 000,6 600)(55 482,19 360,6 400)大储油柜 ③(56 000,21 700,6 600)(57 382,21 860,4 850)压力释放阀 ④(56 000,24 000,6 600)(57 132,23 660,5 600)小储油柜 ⑤(54 885,25 200,6 600)(55 485,26 460,5 204)(54 285,26 460,5 204)在线滤油机 ⑥(54 000,25 200,6 600)(54 482,23 160,9 400)高压套管
无人机在不同的巡检点巡检拍摄时,所对应的相机云台姿态角并不相同。相机云台姿态角见表2,具体为相机坐标系相对于系统坐标系下的偏航角α、滚转角β及俯仰角θ。偏航角α为实际航向与计划航向之间的夹角,顺时针为正;滚转角β为物体绕前后轴线转动的角度,即在水平方向旋转的角度,飞行和悬停过程保持机身水平,因此滚转角β为0°;俯仰角θ为机体轴与地面之间的夹角,向上为正。
表2 相机云台姿态角
Tab.2 Camera cloud table posture angle
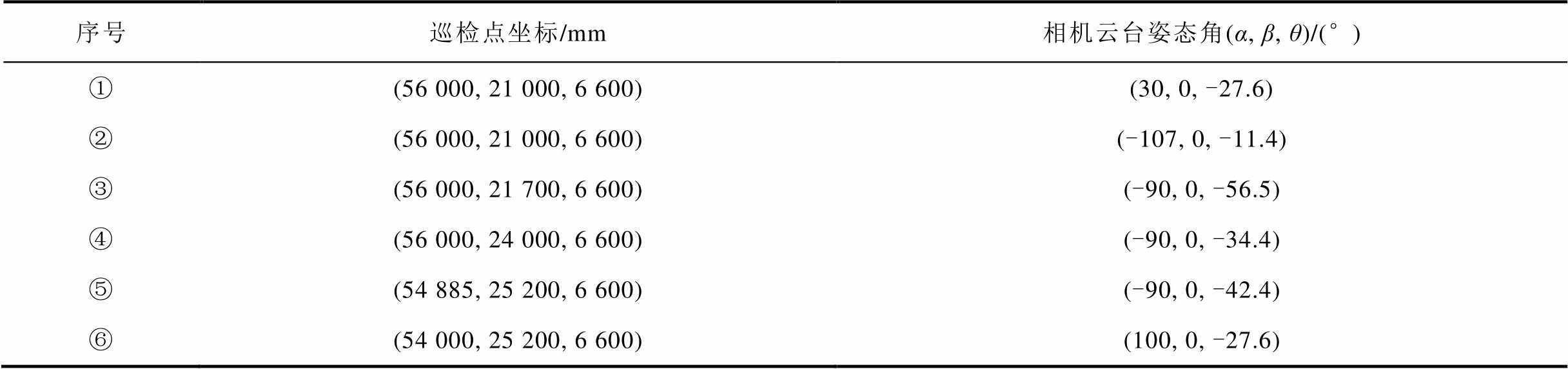
序号巡检点坐标/mm相机云台姿态角(α, β, θ)/(°) ①(56 000, 21 000, 6 600)(30, 0, -27.6) ②(56 000, 21 000, 6 600)(-107, 0, -11.4) ③(56 000, 21 700, 6 600)(-90, 0, -56.5) ④(56 000, 24 000, 6 600)(-90, 0, -34.4) ⑤(54 885, 25 200, 6 600)(-90, 0, -42.4) ⑥(54 000, 25 200, 6 600)(100, 0, -27.6)
根据3.1节中无人机巡检点的设置,对无人机巡检换流变压器的路径进行规划。由变压器区域的空间电磁场分布可知,阀厅墙面侧的电场和磁场强度很低,并且没有高压导线分布,无人机不会受到干扰。同时,由于换流变压器散热的需求,在变压器的前方和左侧安装有多台风机,风机运转带来的气流运动可能会对无人机的正常工作产生影响,在规划航迹时应该避开此强气流区域。因此,在保证安全距离的前提下,无人机由绝缘子串的右侧进入巡检区域。单台换流变压器的巡检路径如图8所示,巡检路径上与设备最近距离为距套管1.2 m。
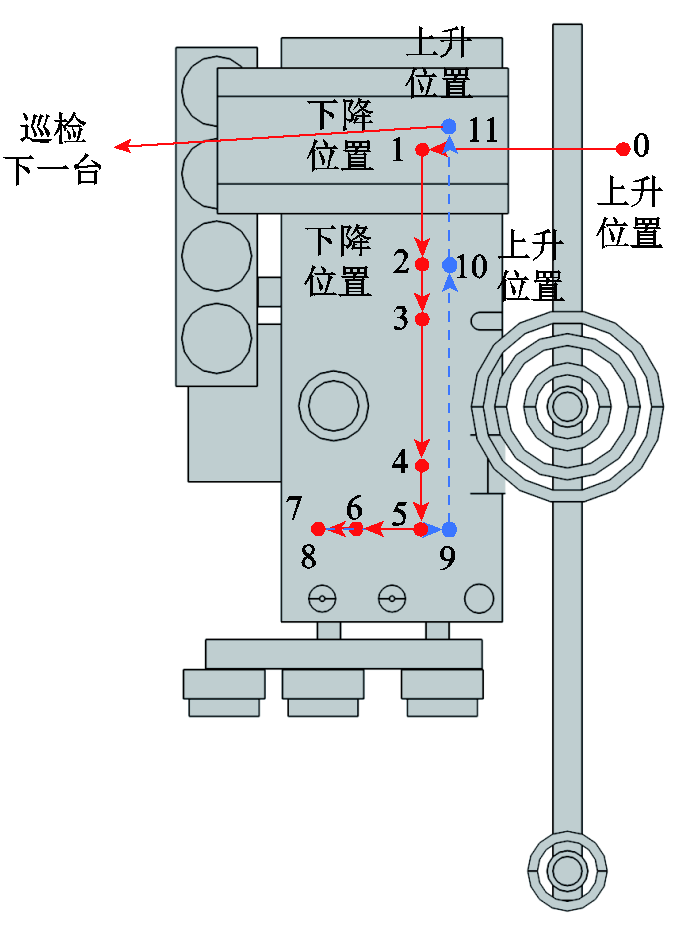
图8 单台换流变压器的巡检路径
Fig.8 Patrol path for single converter transformer
具体巡检步骤如下:①无人机在隔离墙外由点0起飞,垂直爬升至22 000 mm;②无人机水平飞行至点1正上方后,垂直下降至点1坐标;③无人机水平前进至点2正上方后,垂直下降至点2坐标悬停,并分别对高压套管和大储油柜指示仪表拍照;④保持飞行高度不变,水平前进至坐标3悬停并对压力释放阀拍照;⑤水平飞行至坐标4悬停并对小储油柜拍照;⑥水平前进至坐标5,调整机体姿态后再水平前进至坐标点6悬停,并对在线滤油机的压力表指示拍照;⑦水平前进至坐标7悬停并对高压套管拍照;⑧保持飞行高度不变,按8→9→10路径飞行至点10坐标后垂直爬升至8 700 mm;⑨水平前进至坐标11后再垂直爬升至22 000 mm,水平飞越至下一台换流变压器进行同样路径的巡检;⑩全部巡检作业完成后飞至降落点。换流变压器区域的整体巡检路径如图9所示。
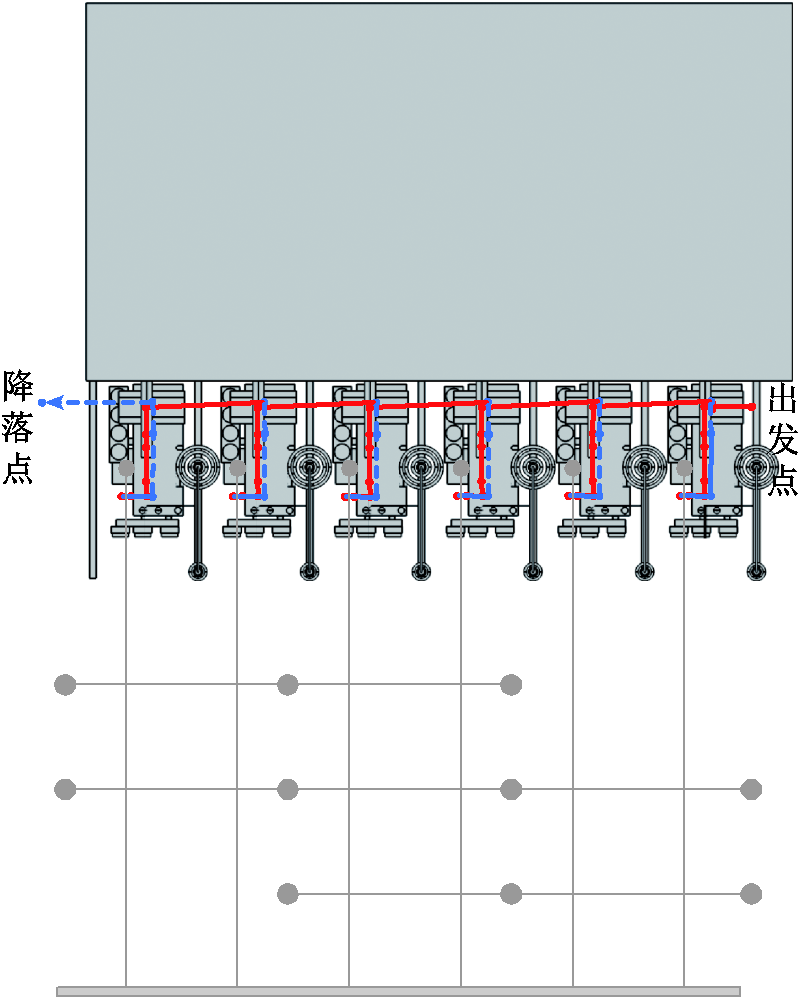
图9 换流变压器区域无人机巡检路径
Fig.9 Patrol path for uav in converter transformer area
为验证飞行路径穿行区域的安全性,在三维模型中绘制飞行路径,计算路径上的电场强度和磁感应强度,结果分别如图10和图11所示。由图10和图11可知,额定运行条件下无人机按此巡检路径飞行时,飞行路径上的最大电场强度为27 kV/m,最大磁感应强度为60 µT,均小于无人机机身所能承受的安全限值。根据GB/T 311.2—2013《绝缘配合第2部分:使用导则》相关规定,变压器侧需配合装设避雷器进行防护,此500 kV换流站的换流变压器侧经配合避雷器进行防护后,变压器的最大操作过电压约为1.8Um。以1.8Um作为极端情况下的运行电压进行仿真计算,得到此路径上的电场强度仍然能够满足安全限值。一般过电流情况下,无人机的巡检路径上磁感应强度不大于100 µT;接地短路情况下,可能导致路径上部分区域超过限制,但接地故障一般都在几十毫秒内切除,存在时间很短,对无人机的磁罗盘影响时间短、可恢复,短时偏移距离小于5 cm。考虑更大偏移裕度,以路径为中心,取半径500 mm圆柱面上的电磁场数值,最大电场强度为31.73 kV/m,最大磁感应强度为72.72 µT,满足安全限值。
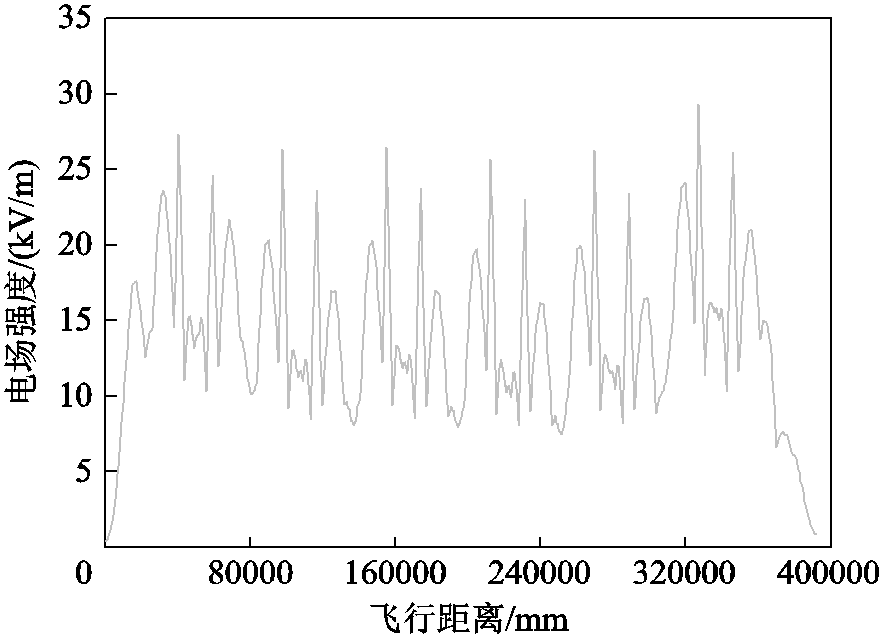
图10 巡检路径上的电场强度
Fig.10 Electric field intensity on patrol path
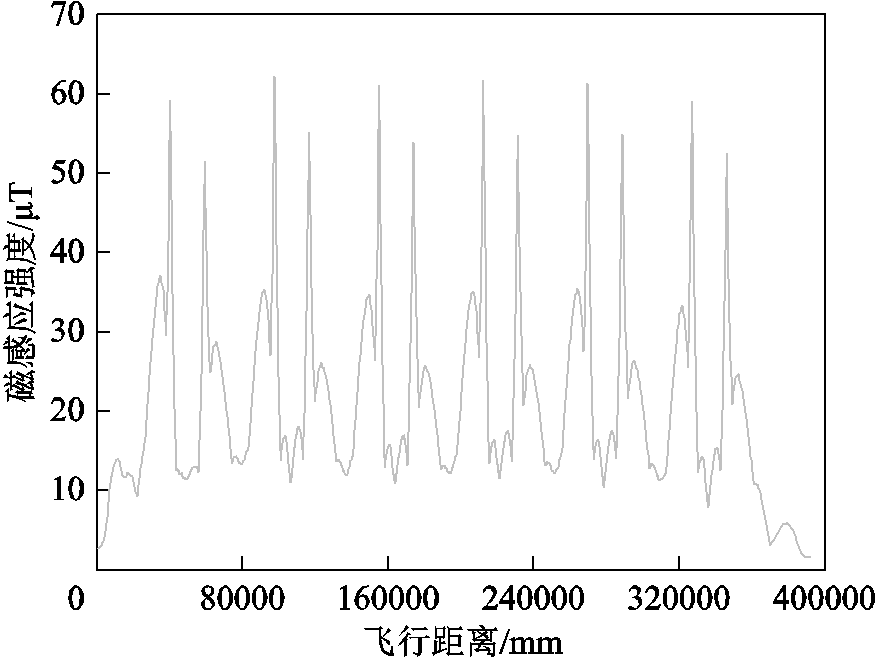
图11 巡检路径上的磁感应强度
Fig.11 Magnetic field intensity on patrol path
为保证巡检任务的规范化和可重复性,根据规划路径和巡检坐标设置航点任务,使其自主完成飞行巡检任务。为保证现场实验的安全,选择天气状况良好的一天进行实验,实验现场温度为10.9℃,湿度为58.5%,风速为2 m/s。现场实验步骤如下:
1)将规划巡检点的xy坐标转换为精确经纬度坐标,将规划巡检点的z坐标转换为飞行高度。
2)将巡检的航点和航迹信息导入无人机系统,并对无人机进行飞行前安全检查。
3)将无人机放置在指定的坐标原点,启动无人机并开始自主巡检任务,巡检过程拍照记录。
4)巡检完成,无人机飞至降落点并降落。关闭无人机后,导出巡检数据并归档。图12即为无人机实地飞行巡检拍摄的设备可见光和红外图像。

图12 无人机巡检拍摄的设备图像
Fig.12 Device image taken during UAV patrol
本文等比例地建立了某换流站换流变压器的仿真模型,对500 kV换流变压器区域的空间电磁场进行了计算,分析了无人机巡检换流变压器的安全飞行区域和无人机与巡检设备的安全距离,规划了无人机巡检点、巡检路径以及云台姿态,并利用自主巡检对换流变压器区域进行了实地飞行测试。结果表明:
1)换流变压器的强电磁场区域主要分布在高压套管和高压母线附近,绝缘子串附近电磁场强度较低,电场和磁场最大值均出现在高度为19 000 mm时。无人机与高压套管和高压母线的最小安全距离分别为700 mm和1 500 mm。
2)根据待巡检设备的巡检内容、设备坐标和安全距离等,对无人机巡检点和巡检路径进行规划,并对飞行路径上的电磁场强度进行求解,路径上的最大电场强度为27 kV/m,最大磁感应强度为60 µT;考虑路径偏移500 mm时,电场强度最大为31.73 kV/m,磁感应强度最大为72.72 µT,均小于无人机可承受的电磁场安全阈值。
3)根据规划的巡检路径进行实地测试,发现无人机可以按照巡检路径安全、可靠地完成巡检作业,电磁干扰对其影响很小,拍摄效果良好,很好地验证了路径的可行性和合理性。
参考文献
[1] 张文亮, 于永清, 李光范, 等. 特高压直流技术研究[J]. 中国电机工程学报, 2007, 27(22): 1-7. Zhang Wenliang, Yu Yongqing, Li Guangfan, et al. Researches on UHVDC technology[J]. Proceedings of the CSEE, 2007, 27(22): 1-7.
[2] 杨帆, 池骋, 刘刚, 等. 计及温度-电场强度非线性的换流变压器瞬态电场影响分析[J]. 电工技术学报, 2020, 35(23): 4971-4979. Yang Fan, Chi Cheng, Liu Gang, et al. Study on transient insulation condition of converter transformer based on nonlinearity between temperature and electric field[J]. Transactions of China Electrotechnical Society, 2020, 35(23): 4971-4979.
[3] 李冰, 王泽忠, 刘海波, 等. 直流偏磁下500kV单相变压器振动噪声的试验研究[J]. 电工技术学报, 2021, 36(13): 2801-2811. Li Bing, Wang Zezhong, Liu Haibo, et al. Experiment on vibro-acoustic characteristic of 500kV single-phase transformer under DC-bias[J]. Transactions of China Electrotechnical Society, 2021, 36(13): 2801-2811.
[4] 李冰, 王泽忠, 刘恪, 等. 特高压变压器直流偏磁对绕组电流的影响[J]. 电工技术学报, 2020, 35(7): 1422-1431. Li Bing, Wang Zezhong, Liu Ke, et al. Research on winding current of UHV transformer under DC-bias[J]. Transactions of China Electrotechnical Society, 2020, 35(7): 1422-1431.
[5] 黄炜昭, 皇甫学真, 陈建福, 等. 电网主设备运行维护策略辅助决策方法[J]. 电力系统自动化, 2013, 37(10): 119-123, 128. Huang Weizhao, Huangfu Xuezhen, Chen Jianfu, et al. An assistant decision-making method for operation and maintenance strategy of primary equipment in power grid[J]. Automation of Electric Power Systems, 2013, 37(10): 119-123, 128.
[6] 仲林林, 胡霞, 刘柯妤. 基于改进生成对抗网络的无人机电力杆塔巡检图像异常检测[J]. 电工技术学报, 2022, 37(9): 2230-2240, 2262. Zhong Linlin, Hu Xia, Liu Keyu. Power tower anomaly detection from unmanned aerial vehicles inspection images based on improved generative adversarial network[J]. Transactions of China Electrotechnical Society, 2022, 37(9): 2230-2240, 2262.
[7] 律方成, 牛雷雷, 王胜辉, 等. 基于优化YOLOv4的主要电气设备智能检测及调参策略[J]. 电工技术学报, 2021, 36(22): 4837-4848. Lü Fangcheng, Niu Leilei, Wang Shenghui, et al. Intelligent detection and parameter adjustment strategy of major electrical equipment based on optimized YOLOv4[J]. Transactions of China Electrotechnical Society, 2021, 36(22): 4837-4848.
[8] 程书灿, 赵彦普, 张军飞, 等. 电力设备多物理场仿真技术及软件发展现状[J]. 电力系统自动化, 2022, 46(10): 121-137. Cheng Shucan, Zhao Yanpu, Zhang Junfei, et al. State of the art of multiphysics simulation technology and software development for power equipment[J]. Automation of Electric Power Systems, 2022, 46(10): 121-137.
[9] 齐磊, 王星星, 李超, 等. ±1100kV特高压直流换流阀绝缘型式试验下的电场仿真及优化[J]. 高电压技术, 2015, 41(4): 1262-1271. Qi Lei, Wang Xingxing, Li Chao, et al. Electric field simulation and optimization of ±1100kV HVDC converter valve in insulation type test[J]. High Voltage Engineering, 2015, 41(4): 1262-1271.
[10] 李乃一, 彭宗仁, 杜进桥, 等. 特高压变电站工频电场模拟计算及其分布规律[J]. 高电压技术, 2012, 38(9): 2178-2188. Li Naiyi, Peng Zongren, Du Jinqiao, et al. Simulate calculation and distribution of power frequency electric filed in UHV substations[J]. High Voltage Engineering, 2012, 38(9): 2178-2188.
[11] 杜志叶, 阮江军, 干喆渊, 等. 变电站内工频电磁场三维数值仿真研究[J]. 电网技术, 2012, 36(4): 229-235. Du Zhiye, Ruan Jiangjun, Gan Zheyuan, et al. Three-dimensional numerical simulation of power frequency electromagnetic field inside and outside substation[J]. Power System Technology, 2012, 36(4): 229-235.
[12] 刘国嵩, 贾继强. 无人机在电力系统中的应用及发展方向[J]. 东北电力大学学报, 2012, 32(1): 53-56. Liu Guosong, Jia Jiqiang. UAV applications and development in the power system[J]. Journal of Northeast Dianli University, 2012, 32(1): 53-56.
[13] 郑含博, 李金恒, 刘洋, 等. 基于改进YOLOv3的电力设备红外目标检测模型[J]. 电工技术学报, 2021, 36(7): 1389-1398. Zheng Hanbo, Li Jinheng, Liu Yang, et al. Infrared object detection model for power equipment based on improved YOLOv3[J]. Transactions of China Electrotechnical Society, 2021, 36(7): 1389-1398.
[14] 郑中原, 刘桂华, 姜玲, 等. 采用周期边界条件计算高压交流输电线路附近的空间电场[J]. 高压电器, 2023, 59(1): 58-63. Zheng Zhongyuan, Liu Guihua, Jiang Ling, et al. Calculating the spatial electric field beneath a high voltage AC transmission line by using the periodic boundary condition[J]. High Voltage Apparatus, 2023, 59(1): 58-63.
[15] 王旭红, 李浩, 樊绍胜, 等. 基于改进SSD的电力设备红外图像异常自动检测方法[J]. 电工技术学报, 2020, 35(增刊1): 302-310. Wang Xuhong, Li Hao, Fan Shaosheng, et al. Infrared image anomaly automatic detection method for power equipment based on improved single shot multi box detection[J]. Transactions of China Electrotechnical Society, 2020, 35(S1): 302-310.
[16] 施孟佶, 秦开宇, 李凯, 等. 高压输电线路多无人机自主协同巡线设计与测试[J]. 电力系统自动化, 2017, 41(10): 117-122. Shi Mengji, Qin Kaiyu, Li Kai, et al. Design and testing on autonomous multi-UAV cooperation for high-voltage transmission line inspection[J]. Automation of Electric Power Systems, 2017, 41(10): 117-122.
[17] 程书灿, 赵彦普, 张军飞, 等. 电力设备多物理场仿真技术及软件发展现状[J]. 电力系统自动化, 2022, 46(10): 121-137. Cheng Shucan, Zhao Yanpu, Zhang Junfei, et al. State of the art of multiphysics simulation technology and software development for power equipment[J]. Automation of Electric Power Systems, 2022, 46(10): 121-137.
[18] 冯健, 罗日成, 王凤, 等. 110kV输电线路巡检无人机电磁环境效应分析[J]. 电力学报, 2021, 36(6): 498-504. Feng Jian, Luo Richeng, Wang Feng, et al. Electromagnetic environment effect analysis of 110kV transmission line patrol UAV[J]. Journal of Electric Power, 2021, 36(6): 498-504.
[19] 高旭东. 无人机线路巡检安全距离的分析与测量[D]. 太原: 太原理工大学, 2019.
[20] 刘壮, 杜勇, 陈怡, 等. ±500kV直流输电线路直线塔无人机巡检安全距离仿真与试验[J]. 高电压技术, 2019, 45(2): 426-432. Liu Zhuang, Du Yong, Chen Yi, et al. Simulation and experiment on the safety distance of typical ±500kV DC transmission lines and towers for UAV inspection[J]. High Voltage Engineering, 2019, 45(2): 426-432.
[21] 隋宇, 宁平凡, 牛萍娟, 等. 面向架空输电线路的挂载无人机电力巡检技术研究综述[J]. 电网技术, 2021, 45(9): 3636-3648.Sui Yu, Ning Pingfan, Niu Pingjuan, et al. Review on mounted UAV for transmission line inspection[J]. Power System Technology, 2021, 45(9): 3636-3648.
[22] 武帅, 蔡春伟, 陈轶, 等. 多旋翼无人机无线充电技术研究进展与发展趋势[J]. 电工技术学报, 2022, 37(3): 555-565. Wu Shuai, Cai Chunwei, Chen Yi, et al. Research progress and development trend of multi-rotor unmanned aerial vehicles wireless charging technology[J]. Transactions of China Electrotechnical Society, 2022, 37(3): 555-565.
[23] 方旭, 刘金琨. 四旋翼无人机三维航迹规划及跟踪控制[J]. 控制理论与应用, 2015, 32(8): 1120-1128. Fang Xu, Liu Jinkun. Three-dimension path planning and trajectory tracking control for quadrotor unmanned aerial vehicle[J]. Control Theory & Applications, 2015, 32(8): 1120-1128.
[24] 曾懿辉, 何通, 郭圣, 等. 基于差分定位的输电线路多旋翼无人机智能巡检[J]. 中国电力, 2019, 52(7): 24-30. Zeng Yihui, He Tong, Guo Sheng, et al. Research on multi-rotor UAV intelligent power line inspection based on differential positioning[J]. Electric Power, 2019, 52(7): 24-30.
[25] 郑涛, 何瑞, 潘志远, 等. MMC-HVDC换流变压器复杂性涌流产生机理及其影响分析[J]. 电力系统自动化, 2022, 46(23): 102-108. Zheng Tao, He Rui, Pan Zhiyuan, et al. Analysis on generation mechanism and influence of complex inrush current in MMC-HVDC converter transformer[J]. Automation of Electric Power Systems, 2022, 46(23): 102-108.
Abstract Converter transformers are important equipment in DC systems, and they need to be regularly inspected. However, due to the large volume of converter transformers, there are blind spots in both manual inspections and fixed camera inspections. Unmanned aerial vehicle (UAV) can conduct aerial patrols with high operability and flexibility, which can effectively compensate for the shortcomings of manual patrols, solve the blind spots of high-level equipment patrols, and significantly improve the quality and efficiency of patrols. However, the complex electromagnetic environment in the converter transformer area may cause UAV to be interfered and lose control, and a safe inspection path needs to be planned.
Firstly, a three-dimensional simulation model is established based on the actual layout and equipment size of the converter transformer square area of a 500 kV converter station. The spatial electromagnetic field distribution in the converter transformer square area under actual operating conditions is calculated using the finite element method. Then, based on the results of the magnetic field withstand test of the UAV and scholars' research on the ability of the UAV to resist electromagnetic interference, it was determined that it was very safe to fly within an electric field strength of 50 kV/m and a magnetic induction strength of 100 µT. Therefore, based on this safety threshold, the safe flight area range of the UAV is determined, and the inspection path of the UAV is planned in combination with the blind area of the converter transformer and the parts that need to be inspected. The planned path is as follows: The drone takes off from outside the isolation wall, enters the transformer inspection area in a small field strength area close to the valve hall side, descends to the inspection height, and then successively performs inspection on the large oil conservator, high voltage bushing, small oil conservator, pressure relief valve, and online oil filter. Finally, the electromagnetic field intensity on the planned UAV inspection path was calculated, and after verifying the safety of the inspection path, the actual flight inspection test of the converter transformer was carried out.
Through the above research and analysis, the following conclusions can be drawn: (1) The strong electromagnetic field region of the converter transformer is mainly distributed near the high-voltage bushing and high-voltage bus, and the electromagnetic field intensity near the insulator string is relatively low. The minimum safety distance between the UAV and the high-voltage bushing and busbar is 700 mm and 1 500 mm, respectively. (2) The maximum electric field intensity on the planned path is 27 kV/m, and the maximum magnetic flux density on the path is 60 µT. When considering the path offset of 500 mm, the maximum electric field intensity is 31.73 kV/m, and the maximum magnetic flux density is 72.72 µT, both of which are smaller than the electromagnetic field safety threshold that the UAV can withstand. (3) According to the planned inspection path, field tests were conducted and it was found that the drone could complete the inspection work safely and reliably according to the inspection path, with little impact of electromagnetic interference on it, and good shooting results, which well verified the feasibility and rationality of the path.
keywords:Converter transformer, unmanned aerial vehicle patrol inspection, electromagnetic field distribution, path planning
DOI:10.19595/j.cnki.1000-6753.tces.L10049
中图分类号:TM85
国家自然科学基金资助项目(51807110)。
收稿日期 2023-01-13
改稿日期 2023-02-19
普子恒 男,1987年生,副教授,博士生导师,研究方向为高压电器设备绝缘试验技术、输电线路智能运维等。E-mail:pzhdq@ctgu.edu.cn(通信作者)
张 隆 男,1996年生,硕士研究生,研究方向为高电压绝缘与试验技术。E-mail:460281911@qq.com
(编辑 李冰)