图1 六相PMSM与三相PMSM连接方式
Fig.1 Connection of six-phase PMSM and three-phase PMSM
摘要 用一台逆变器驱动两台永磁同步电机串联系统,可以通过控制不同平面的电压矢量实现对两台电机的独立解耦控制。该文提出在一台六相逆变器的六相平面和三相平面下同时注入旋转高频电压信号,通过解调静止坐标系下电流响应的负序分量来分别获得两台电机的转子初始位置角。同时为了提高观测精度,利用解调电流响应中正序分量所获得的误差角对解耦获得的转子初始位置角进行补偿。此外,对于六相串联三相永磁同步电机(PMSM)系统,考虑到系统中两台电机的浅磁饱和特性,在极性判断中利用了与传统单台永磁同步电机相反的结果来进行判断。根据该文所设计的旋转高频电压注入法,可以实现两台电机转子初始位置解耦观测。六相PMSM和三相PMSM的估计误差绝对值的平均值分别为3.72 °和1.81 °。最后,实验验证了所提观测算法的有效性。
关键词:六相串联三相永磁同步电机(PMSM)系统 旋转高频电压 浅磁饱和 转子初始位置 解耦观测
随着多相电机相数的增加,会使其拥有更高的控制自由度。因此,多相电机具有较强的容错能力、更高的控制灵活度,且电机的运行效率更高[1-4]。通过特定的绕组连接方式,可以实现用一套驱动系统控制多台多相电机的串联或并联解耦独立运行,这样可以减少整个系统所需要的控制平台数量,减小系统的体积和成本[5-6]。六相串联三相双电机系统非常适用于主从驱动系统中,并且还存在一个冗余自由度,在系统发生故障时可以实现容错控制。因此,串联系统在船舶驱动、多电飞机、航空航天、纺织、钢铁制造等应用场合具有更高应用价值。
为了追求更低成本、更高的控制精度,无位置传感器控制技术成为电机控制领域的主要研究方 向[7-8],同时在多相电机串联系统中也有了一些研究成果。文献[9]利用无位置传感器技术控制两台五相永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)串联运行。文献[10]通过仿真验证了六相串联三相PMSM系统利用扩展卡尔曼滤波器算法对两台电机转速估计的可行性。
转子位置角实时准确观测是确保永磁同步电机稳定运行的根本,而利用无传感器技术准确观测转子初始位置可以防止电机起动失步,确保电机平稳起动。根据文献调研,信号注入法在转子初始位置观测中已经成为了一种主流方法。低频信号注入 法[11-12]是在假定的d轴上注入一个低频信号,在实际q轴上会产生转矩。通过构造和调节误差函数,使其为零,可以估计出转子初始位置角。但转子抖动带来的不稳定性会影响估计精度。高频信号注入法[13-14]是向电机中注入高频电流或电压信号,受转子的凸极效应,产生的高频电压或电流响应中会包含转子位置角信息。经过信号解调,从响应中提取出转子位置角。由于在提取转子位置角时需要引入滤波器和锁相环等解调环节,在增加系统算法复杂性的同时会存在一定相位偏差。脉冲电压信号注入法[15]是向定子绕组中施加多组等幅等宽电压脉冲,通过检测和比较响应电流大小,确定转子的位置。但由于施加的电压矢量有限,转子初始位置检测误差较大,通常需要与其他方法联用。
根据上述分析,本文提出了利用旋转高频电压注入法来实现对六相串联三相PMSM系统转子初始位置的解耦观测。首先,在静止坐标系下注入旋转高频电压,通过解调静止坐标系下电流响应的负序分量得到两台电机初步的转子初始位置角。其次,为了提高估计精度,通过提取电流响应中正序分量所包含的误差角,并用其来补偿转子位置角[16]。此外,设计时为了防止磁路饱和带来的过电流,将两台电机设计成浅磁饱和永磁同步电机。对于浅磁饱和的永磁同步电机,在其d轴正、反方向上施加幅值相同、作用时间相同的脉冲电压时,可以得到d轴正向电流响应幅值小于反向电流响应幅值。利用该特性,完成了对两台电机磁极极性的判断。最后,在一套六相串联三相PMSM系统上,对所提方法进行研究,验证了其可行性。
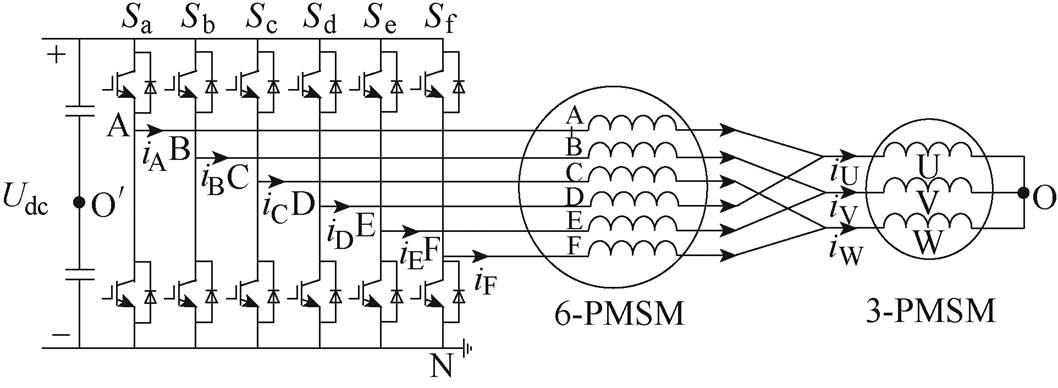
各自空间对称分布的六相PMSM和三相PMSM的定子相绕组分别为A~F和U~W。其中,三相PMSM采用星形联结,其U相与六相电机的AD相连接,V与BE相连,W与CF相连。逆变器输出电流为iA~iF,直流母线电压为Udc,而Si(i=a~f)表示逆变器各相桥臂的开关状态,具体连接方式如图1所示。
图1 六相PMSM与三相PMSM连接方式
Fig.1 Connection of six-phase PMSM and three-phase PMSM
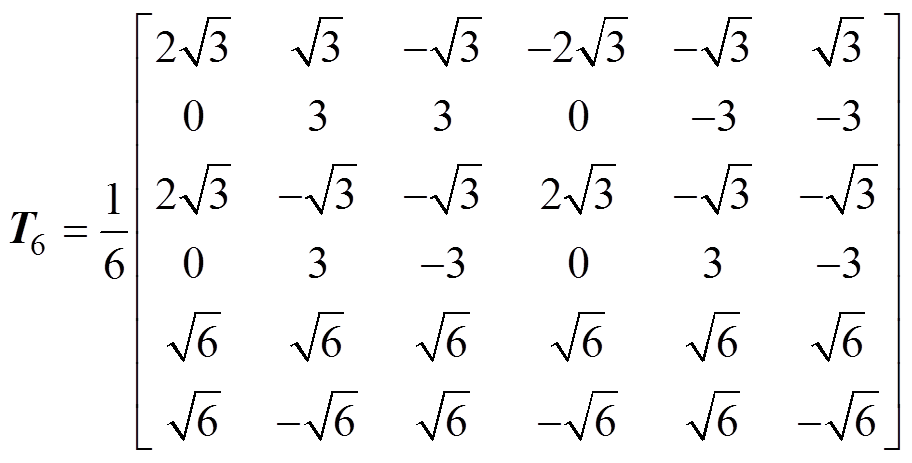
由文献[17]分析可知,通过恒功率变换矩阵T6可将串联系统数学模型由ABCDEF自然坐标系变换到abxyo1o2静止坐标系下,为方便揭示两台电机之间的解耦关系,所选择的变换矩阵T6为
 (1)
(1)
结合图1,单逆变器控制六相串联三相PMSM系统,实际是利用逆变器输出的初相依次互差60 °的电流控制六相PMSM,利用初相依次互差120 °的电流控制三相PMSM,而电流的频率由各自电机给定的转速决定,故控制两台电机的电流频率是任意的,而初相必须相差两倍。利用此性质实现两台PMSM各自的机电能量转换。根据分析可知,T6变换矩阵第一、二行为六相平面,第三、四行为三相平面,第五、六行为不参与机电能量转换的零序平面。
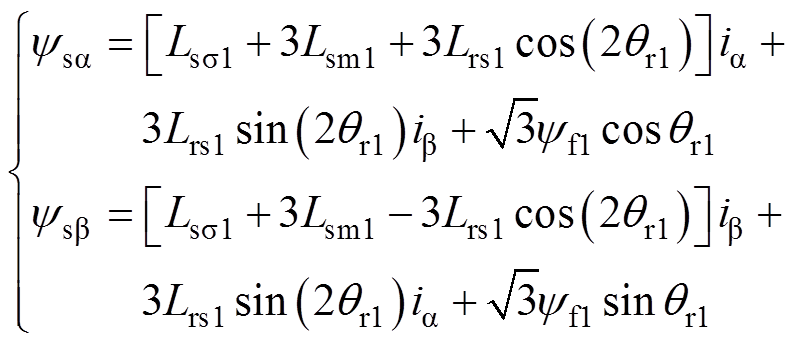
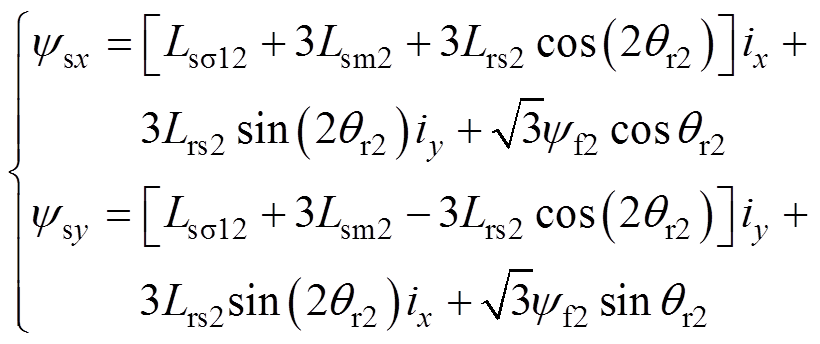
系统在静止坐标系ab、xy、o1o2下的磁链方程为
 (2)
(2)
 (3)
(3)
 (4)
(4)
其中
式中,Lss1和Lss2分别为六相PMSM和三相PMSM每相绕组的漏感;Ld1、Lq1分别为六相PMSM的d1、q1轴电感;Ld2、Lq2分别为三相PMSM的d2、q2轴电感;yf1、yf2为两台电机永磁体磁链幅值;qr1、qr2为两台电机的转子位置角;ia、ib、ix、iy、io1、io2为静止平面各轴系电流;ysa、ysb、ysx、ysy、yso1、yso2为静止平面内各轴系磁链;Lss12为三相平面内的漏感;Lsm1和Lrs1分别为六相平面的均值电感和均差电感;Lsm2和Lrs2分别为三相平面的均值电感和均差电感。
系统在静止坐标系ab、xy、o1o2下的电压方程为
 (5)
(5)
 (6)
(6)
 (7)
(7)
式中,Rs1、Rs2分别为六相PMSM、三相PMSM相绕组的电阻;ua、ub、ux、uy、uo1、uo2为静止平面各轴系电压。
从图1的电路拓扑可知,Si=1表示第i相桥臂上开下关;反之,Si=0则表示上关下开。以二进制方式对开关状态进行编号,SaSbScSdSeSf=000000~111111,则六相逆变器总共有26种开关状态,即共有26个基本电压矢量。
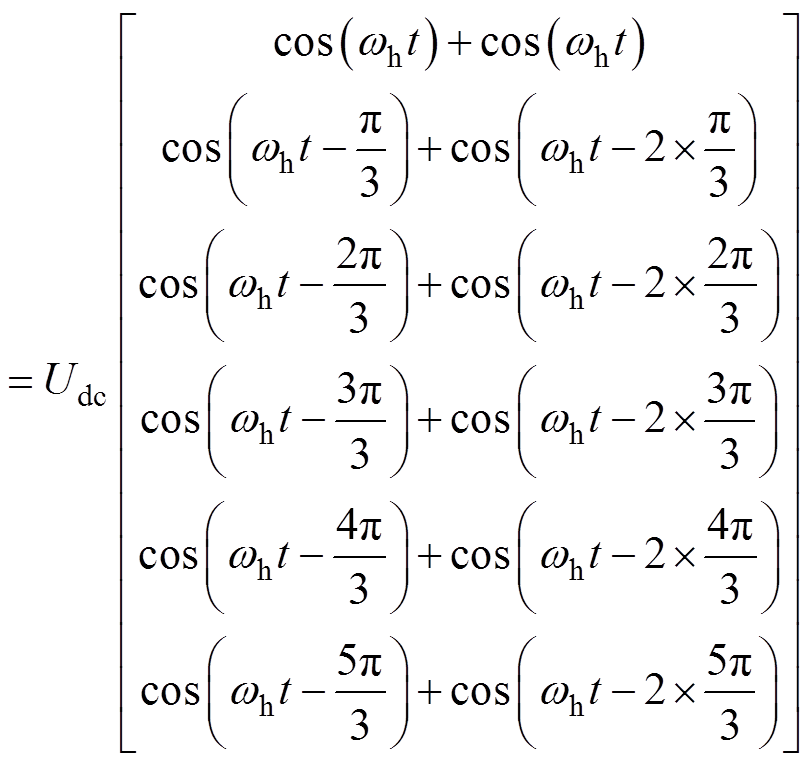
将每相的开关状态结合T6变换矩阵与直流母线电压Udc表示系统在abxyo1o2静止坐标系下电压方程,具体如下
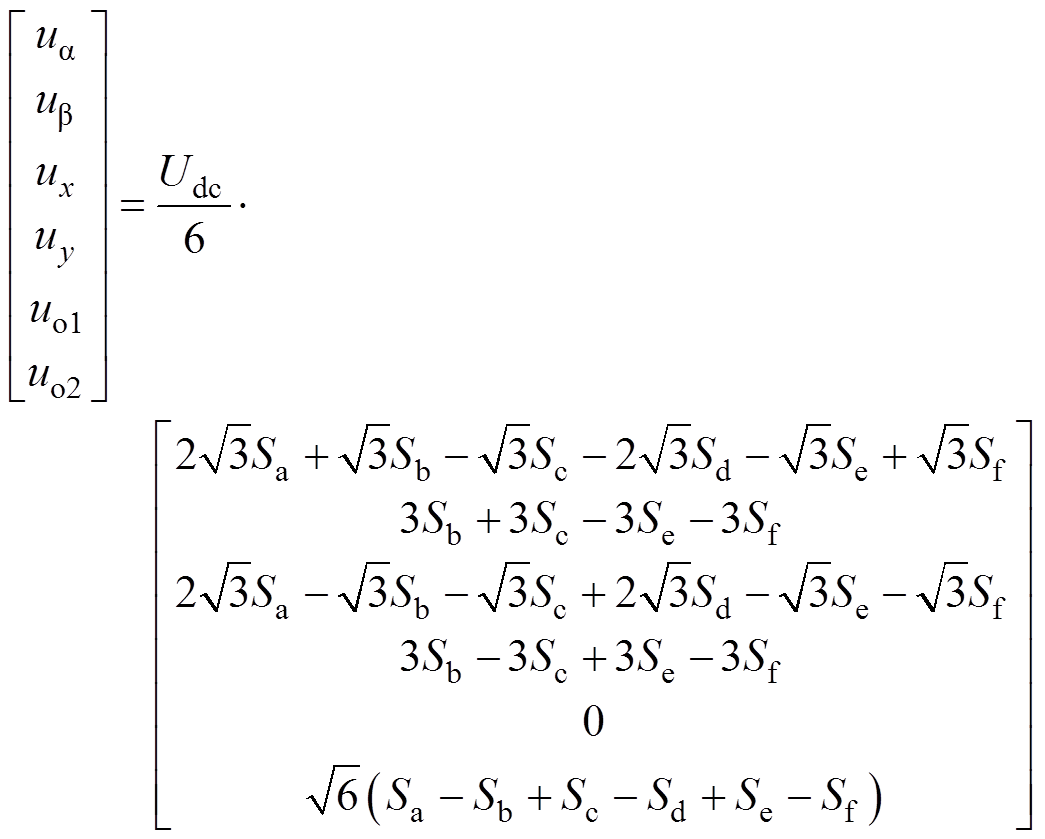 (8)
(8)
式中,uo1=0是因为uo1所在的零序平面电流初相依次相差360 °,当串联系统的中性点没有引出时,该平面的电流恒为零。由式(4)、式(7)可知,当io1为零时,uo1恒为零。
从式(2)~式(7)可知,在3个平面内,电流、磁链、电压是互不影响的,即可以通过控制对应平面内的电压来控制相应的磁链和电流,以实现对串联系统中两台电机的独立解耦控制。
图2给出六相平面和三相平面基本电压矢量,从矢量图中可以看出,当向系统内注入相应的基本电压矢量或相应的合成矢量时,只需控制其他平面的电压为零,就可以对相应的平面进行独立控制,而不会影响其他平面。
由上述分析可知,在静止坐标系下可以对六相PMSM和三相PMSM解耦控制,且由式(2)、式(3)、式(5)、式(6)可知,当向六相平面和三相平面分别注入旋转高频电压时,可以解耦观测出对应的转子位置角qr1和qr2。相应注入的旋转高频电压信号为
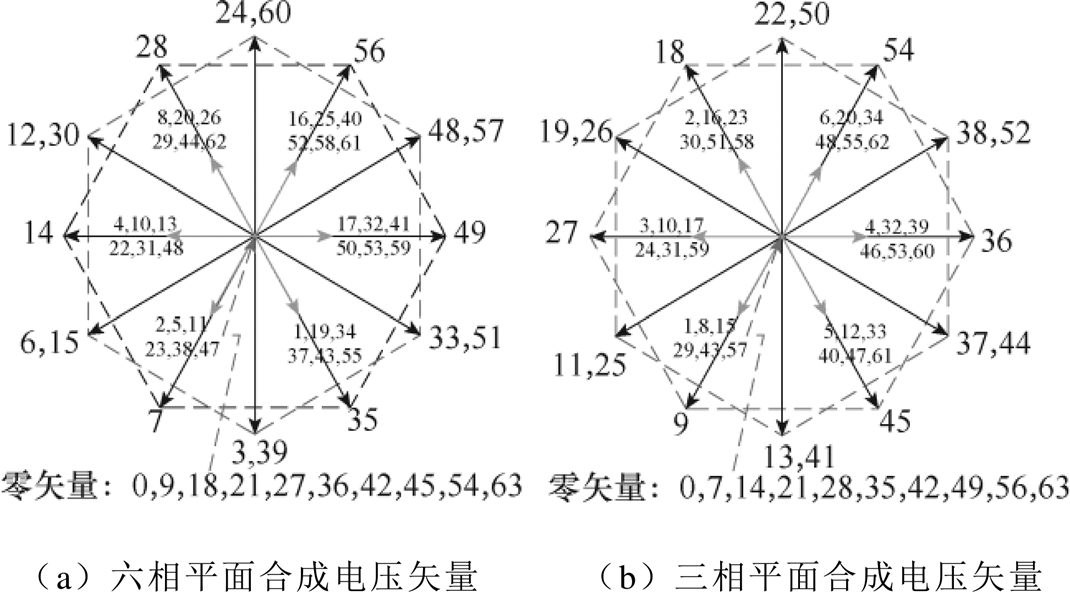
图2 基本电压矢量
Fig.2 Vector diagram of the fundamental voltage
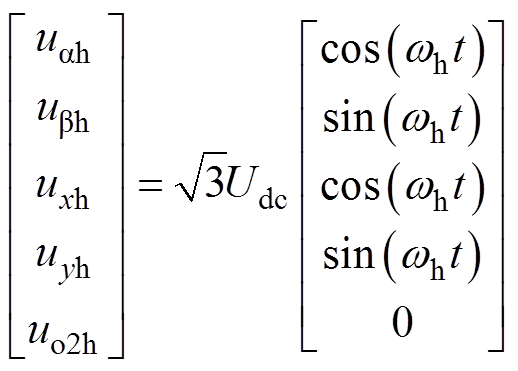 (9)
(9)
式中,wh为注入电压的角速度;uah、ubh、uxh、uyh、u02h为静止平面内各轴系注入的高频电压。此外,为了避免零序电流对观测可能带来的干扰,将注入的零序电压设为零。
将式(9)进行逆变换得到自然坐标系下的电压方程为
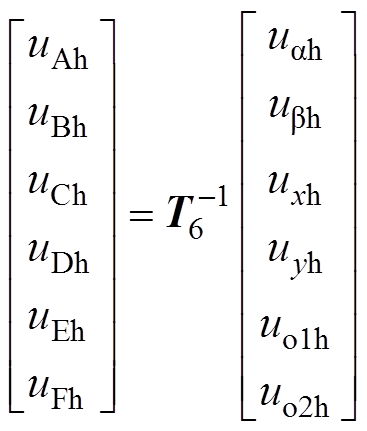
 (10)
(10)
式中,uAh、uBh、uCh、uDh、uEh、uFh为自然坐标系下各相注入的高频电压。前一部分为相位互差60 °的电压,该部分产生的电流作用于六相PMSM,不会流经三相PMSM。而后一部分为相位互差120 °的电压,该部分产生的电流作用于三相PMSM,而在六相互差180 °的两相绕组中流过了相同电流,故在六相PMSM中作用效果很小,因此该注入方案有效。
由于初始位置观测时电机转子是静止的,故wr1=0,wr2=0,并且定子绕组中注入的是高频电压信号,故可以忽略定子电阻压降,联立式(2)、式(3)、式(5)、式(6)及式(9),得到高频电压方程为
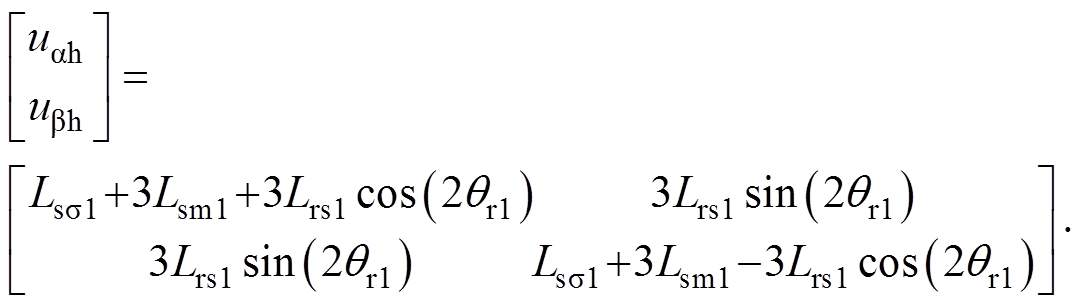
 (11)
(11)
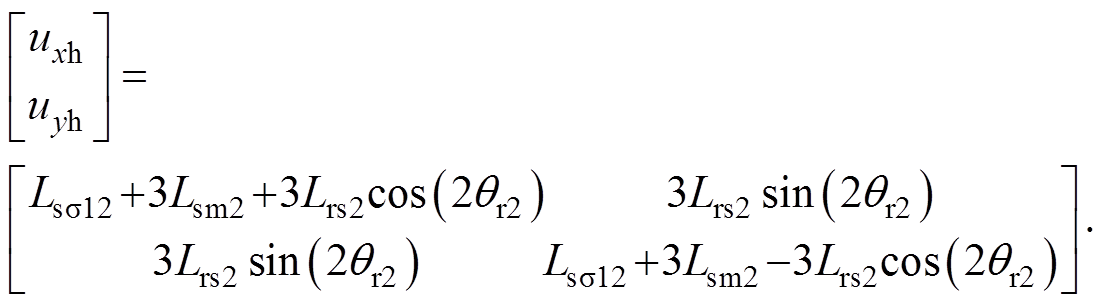
 (12)
(12)
从式(11)、式(12)中可知,估计转子初始位置可以通过检测并计算高频电流响应在静止坐标系ab、xy下的表达式得到,具体表达式为
 (13)
(13)
 (14)
(14)
其中
Lab=(Lss1+3Lsm1+3Lrs1)(Lss1+3Lsm1-3Lrs1)
Lxy=(Lss12+3Lsm2+3Lrs2)(Lss12+3Lsm2-3Lrs2)
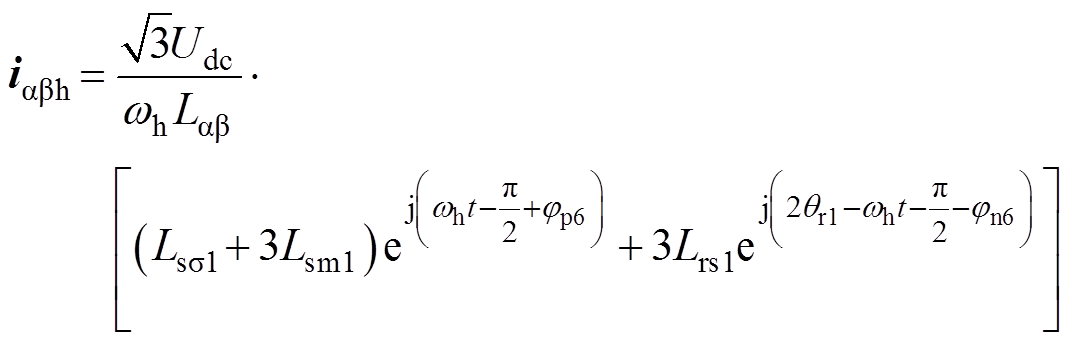
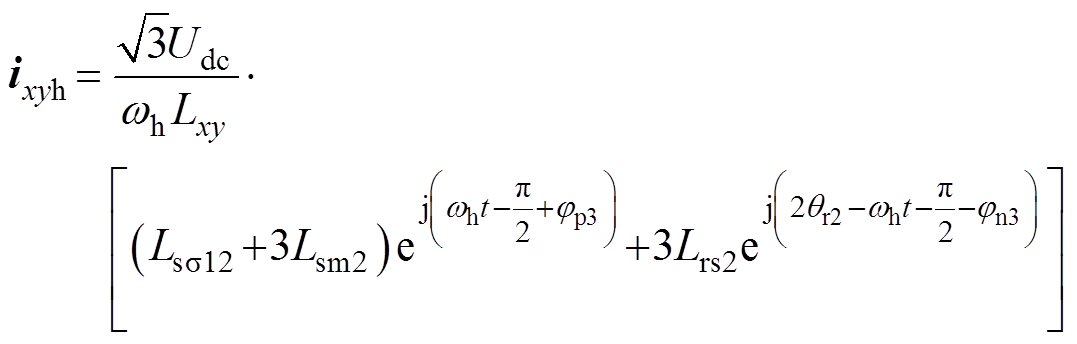
可知,通过解调高频电流响应iah、ibh、ixh、iyh,可以得到六相PMSM和三相PMSM的转子初始位置角,并且两台电机的转子初始位置是解耦的。虽然在三相平面的高频电流响应中包含了六相PMSM的漏感Lss1,但其值很小且波动很小,故可以将其视为三相PMSM漏感的一部分。将两个平面内的高频电流响应写成指数形式iabh、ixyh,具体形式为
 (15)
(15)
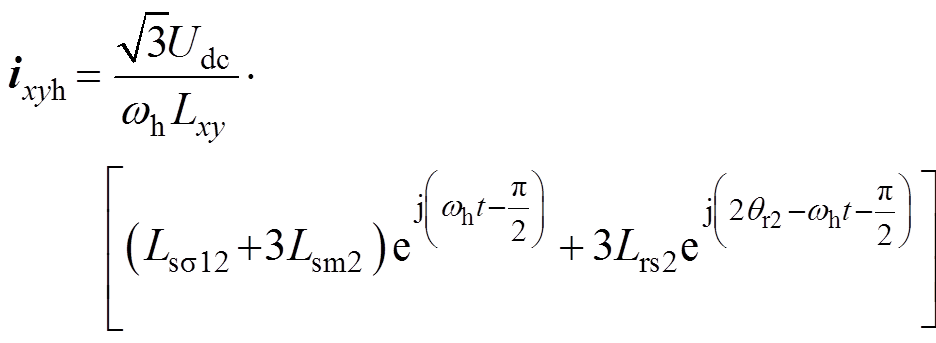 (16)
(16)
从式(15)、式(16)可知,六相PMSM和三相PMSM的转子初始位置角qr1、qr2在高频电流响应的负序分量中,因此可以通过解调电流响应负序分量的初始相位得到位置角信息。图3为两台PMSM转子初始位置解调框图。
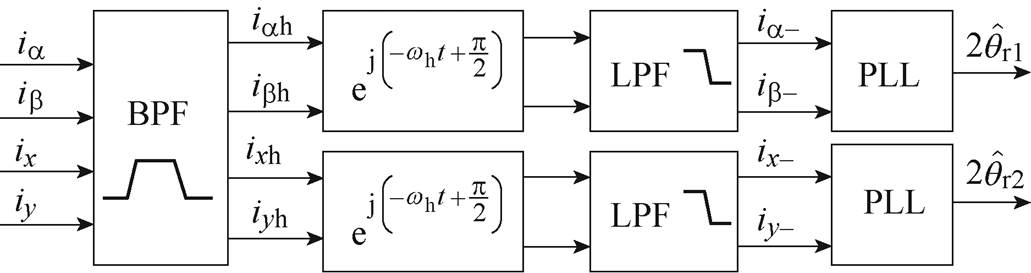
图3 转子初始位置解调框图
Fig.3 Demodulation diagram of rotor initial position
根据图3,采样的电流通过带通滤波器(Band Pass Filter, BPF)、三角函数运算和低通滤波器(Low Pass Filter, LPF)后得到了包含转子初始位置角信息的直流分量ia-、ib-与ix-、iy-,具体表达式为
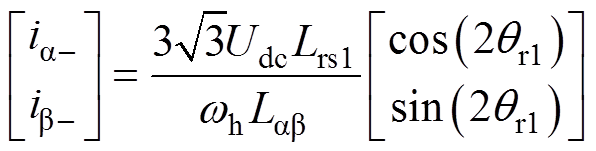 (17)
(17)
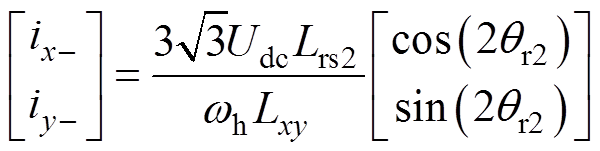 (18)
(18)
从式(17)、式(18)可知,经过解调后得到的包含转子初始位置角信息的直流分量是两倍的初始位置角。将该直流分量通过锁相环后就能得到六相PMSM和三相PMSM的两倍转子初始位置角 和
和 ,最后通过下文的极性判断得到最终的转子初始位置估计角qr1est和qr2est。
,最后通过下文的极性判断得到最终的转子初始位置估计角qr1est和qr2est。
从2.1节理论推导可知,利用旋转高频电压注入可以实现六相PMSM和三相PMSM转子初始位置的解耦观测,但该方案估计转子初始位置是忽略了两台电机的定子电阻[18]和转子不同位置饱和度不一样等因素。另外,实际中该方案的位置辨识精度受数字滤波器所产生的解调延时、数字采样计 算[19]、脉冲宽度调制(Pulse Width Modulation, PWM)输出以及死区时间等所产生的控制延时影响较大。这些因素都会给最终转子初始位置估计带来误差。因此,为了使最终的观测结果更加准确,需要对观测出来的角度进行补偿。由于这些误差不仅会出现在需要观测的高频电流负序分量中,同时在正序分量也会有所体现。鉴于此,本文通过解调电流正序分量中的误差角对初步的转子位置角观测进行在线补偿,来提高辨识精度。现将由外部因素对六相PMSM和三相PMSM正、负序电流带来的误差分别记为j6+、j6-和j3+、j3-。
除了考虑上述主要外部因素误差,还应当考虑自身注入的旋转高频电压信号带来的误差。以控制周期50 ms,注入信号频率为800 Hz为例。在实际中生成一个完整周期的正弦波信号需要25个控制周期,每个控制周期所占的角度为14.4 °,因此在每个控制周期内解调高频电流响应时会存在一定的角度误差。文献[20]用实验表明,仅改变注入信号的频率,在固定的角度上观测得到的转子初始位置角误差随频率的增大而增大。现将由于自身注入的旋转高频电压信号对六相PMSM和三相PMSM带来的误差分别记为jh6和jh3。
综合上述的误差分析,可以将式(15)、式(16)改写为
 (19)
(19)
 (20)
(20)
其中
jp6=j6++jh6 jn6=j6-+jh6
jp3=j3++jh3 jn3=j3-+jh3
式中,jp6、jn6分别为六相平面高频电流响应正、负序分量中总误差角;jp3、jn3分别为三相平面高频电流响应正、负序分量中总误差角。
利用高频电流响应中正序分量得到的误差角度对负序分量观测得到的转子位置角进行适当的补偿可以提高观测精度,转子位置误差补偿如图4所示。
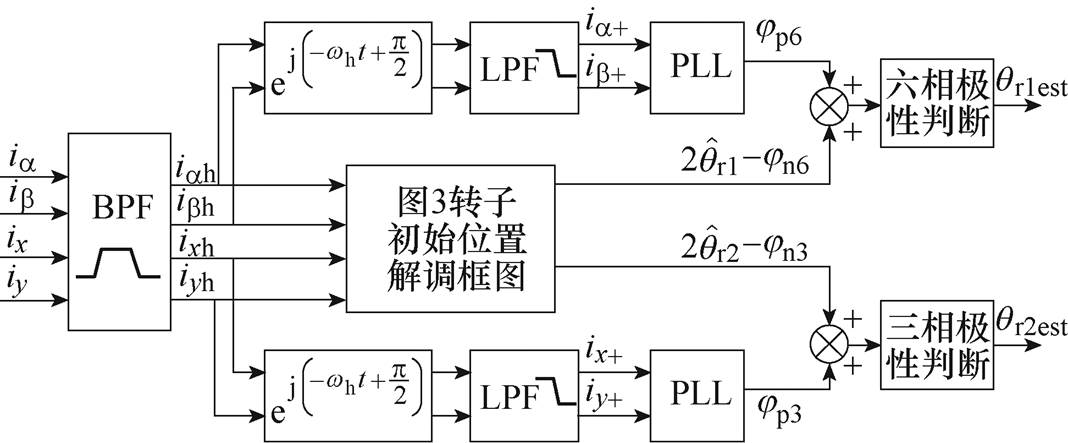
图4 转子位置误差补偿
Fig.4 Diagram of rotor position error compensation
经2.1节分析,通过对高频电流响应负序分量的提取可以观测得到两倍的转子初始位置角。而由于转子对称的凸极结构,单从高频响应电流中还不能对转子磁极的极性进行判断,还需增加极性判断算法进行甄别。转子极性判断是利用了永磁同步电机定子铁心非线性磁化特性来区分转子永磁体的N、S极。根据文献[21-22],针对传统单台PMSM为了充分利用材料,电机在设计时往往要令磁路处于轻微饱和状态,当外加的脉冲电压形成的磁动势增量沿d轴正方向时,会加深磁路的饱和,此时d轴的电感会减小,所产生的d轴电流就会增大;反之,当外加的脉冲电压形成的磁势增量沿d轴反方向时,所产生的d轴电流就会减小。
但是对于六相PMSM串联三相PMSM系统,经过对其连接方式和数学模型的分析可知,逆变器输出初相互差60 °的电流分量用来驱动六相电机,而初相互差120 °的电流分量用来驱动三相电机。换言之,在同时控制两台电机时,电路中存在着两种分量电流。假设两种电流分量频率也成两倍关系,且幅值都为I时,其合成电流为1.76I,如图5所示。
该合成的大电流对整个控制系统安全会造成不良影响。因此,针对该六相PMSM串联三相PMSM系统,两台电机设计成浅磁饱和永磁同步电机,所谓浅磁饱和就是电机的额定工作点一般设计在磁化曲线膝点以下的线性区内,如图6磁化曲线中k点所示。
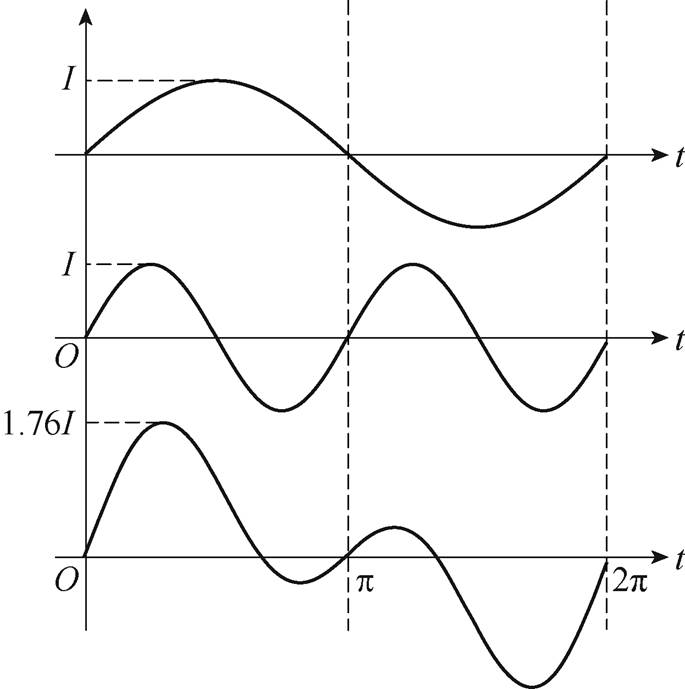
图5 合成电流
Fig.5 Current synthesis diagram
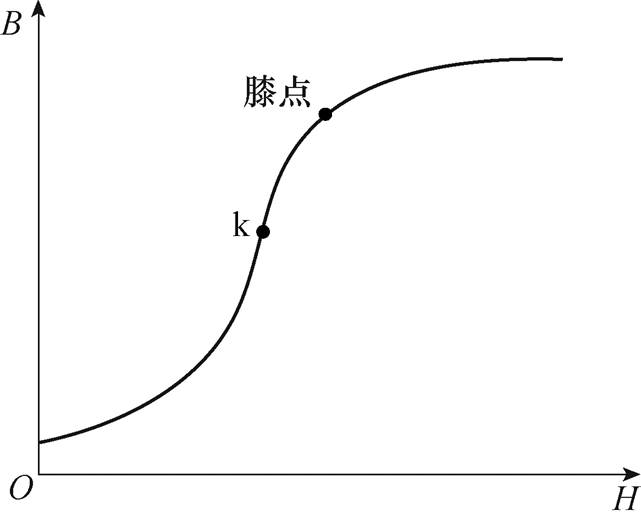
图6 磁化曲线
Fig.6 Magnetization curve
以六相PMSM为例,根据文献[23]所提方法,使用有限元分析六相PMSM在d轴上的磁链-电流波形。曲线上某一点的斜率即为该点的d轴电感值,磁链-电流曲线如图7所示。
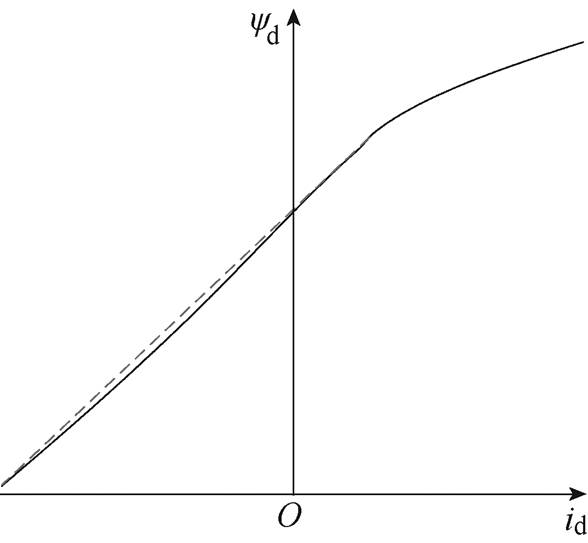
图7 磁链-电流曲线
Fig.7 Flux-current curves
从图7可以看出,当d轴电流为零时,此时yd即为永磁体磁链,且位于线性区间内。当沿着d轴正向和反向施加相同作用时间、相同大小的脉冲电压时,会出现反向的电流id-增量比正向id+大。因此使用多项式对有限元软件仿真得到的磁链-电流曲线,即图7,沿d轴正向和反向分别进行拟合得到正、反向磁链yd+与yd-,具体表达式为
 (21)
(21)
 (22)
(22)
电机静止时,在旋转坐标系下d轴电压表示为
 (23)
(23)
 (24)
(24)
式中,ud+、ud-分别为d轴正、反向施加的脉冲电压。在ud+=40 V,ud-=-40 V的情况下,求解式(23)、式(24)所示的非线性微分方程,分别得到两种情况下的id+、id-随时间的变化曲线,如图8所示。
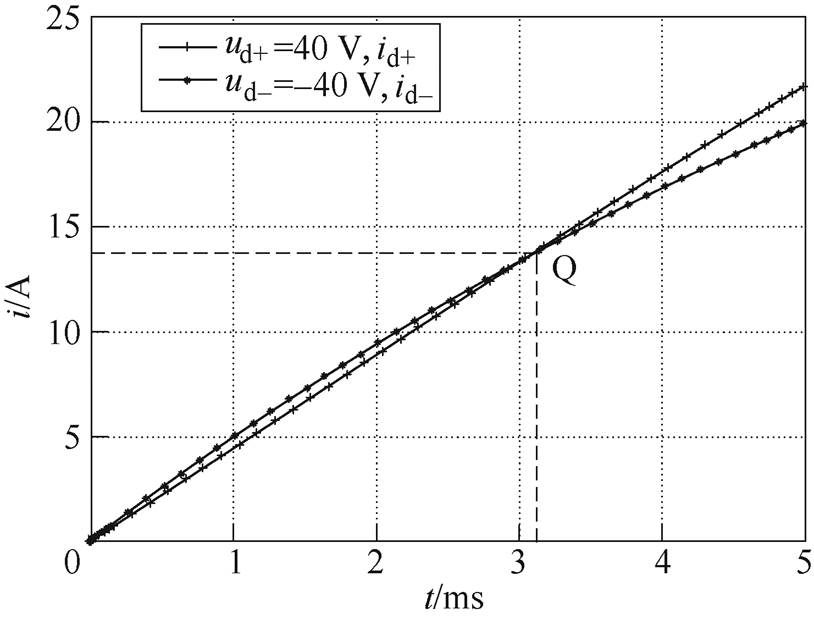
图8 电流-时间曲线
Fig.8 Current-time curves
由图8可知,所得到的正、反向电流时间曲线存在交点Q,Q点以下反向电流id-比正向电流id+大,该现象与传统设计的永磁同步电机所观测到的现象相反,而在Q点以上则与传统设计的永磁同步电机所观测到的现象相同。为了防止电流过大对整个系统带来的不良后果,本文利用交点以下的现象来进行极性判断。
根据对六相串联三相PMSM系统的分析可知,在极性判断中可以通过分别在六相PMSM和三相PMSM的静止坐标系ab 和xy内注入脉冲电压,然后根据各自旋转坐标系下d轴的电流大小来进行判断。由图2可知,在两个平面内互不影响的基本电压矢量较少,故需要使用合成电压矢量来提高极性判断的精度。本文是利用固定角度的合成电压矢量,将目标电压矢量投影至相应的静止坐标系中,就可得到对应的uja、ujb、ujx、ujy,最后经逆变器输出对应的脉冲电压。图9给出各自平面注入电压的合成电压矢量,将两个平面分成12个扇区,每个扇区占30 °,在相隔180 °的两个扇区内注入作用时间相同、幅值相等的脉冲电压。其中,在六相平面的合成电压矢量标号为m1~m12,三相平面内的合成电压矢量标号为n1~n12。此外表1根据图9给出了两台电机转子极性判断电压矢量选择。

图9 合成电压矢量
Fig.9 Vector diagram of the synthesize voltage
表1 两台电机转子极性判断电压矢量选择
Tab.1 Voltage vector selection for rotor polarity judgment of two motors
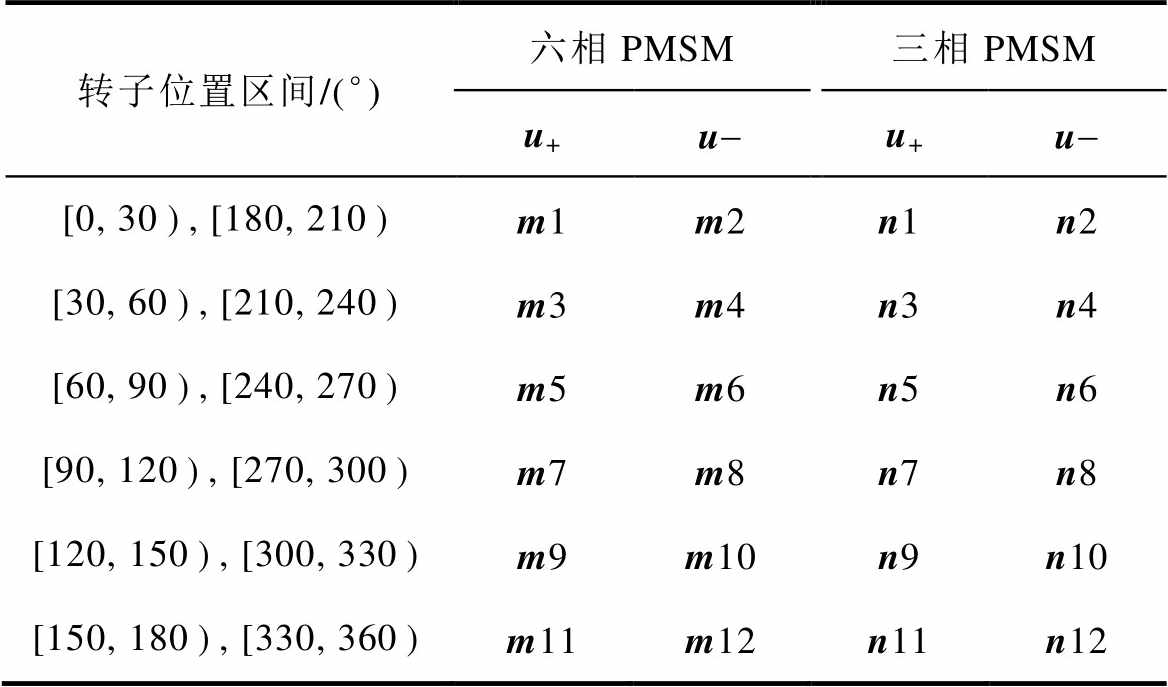
转子位置区间/(°)六相PMSM三相PMSM u+u-u+u- [0, 30, [180, 210m1m2n1n2 [30, 60, [210, 240m3m4n3n4 [60, 90, [240, 270m5m6n5n6 [90, 120, [270, 300m7m8n7n8 [120, 150, [300, 330m9m10n9n10 [150, 180, [330, 360m11m12n11n12
综上所述,根据估计得到的 和
和 ,向两个平面内先后分别注入两个方向相反的合成电压矢量,在对应的d轴正反方向作用得到相应的电流响应幅值,六相PMSM为id1+和id1-,三相PMSM为id2+和id2-。最终确定转子位置角为
,向两个平面内先后分别注入两个方向相反的合成电压矢量,在对应的d轴正反方向作用得到相应的电流响应幅值,六相PMSM为id1+和id1-,三相PMSM为id2+和id2-。最终确定转子位置角为
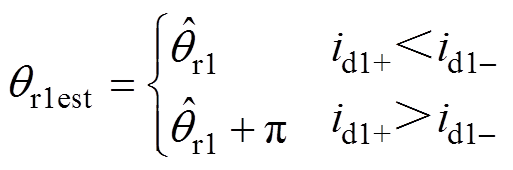 (25)
(25)
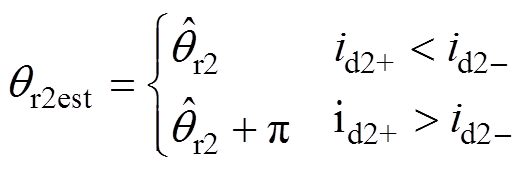 (26)
(26)
式中, 为六相PMSM的估计位置角;
为六相PMSM的估计位置角; 为三相PMSM的估计位置角;id1+、id1-分别为六相电机d轴正、反方向电流响应幅值;id2+、id2-分别为三相电机d轴正、反方向电流响应幅值。
为三相PMSM的估计位置角;id1+、id1-分别为六相电机d轴正、反方向电流响应幅值;id2+、id2-分别为三相电机d轴正、反方向电流响应幅值。
本文所提的六相串联三相永磁同步电机转子初始位置角解耦观测流程如图10所示。具体的实施过程如下:
(1)对两台电机进行初步的转子初始位置角解耦观测。根据式(9)在静止坐标系下注入旋转高频电压信号,通过解调对应的电流响应得到负序分量下的初始位置角 -jn6和
-jn6和 -jn3,以及正序分量误差角jp6和jp3。
-jn3,以及正序分量误差角jp6和jp3。
(2)角度误差补偿,提升估计精度。将解调静止坐标系下的电流响应得到的正序分量误差角jp6和jp3对初步估计的转子初始位置角分别进行补偿,得到两台电机精确的转子初始位置角和。
(3)两台电机的转子磁极极性判断。通过第(2)步得到的转子初始位置角和选择所在的扇区,根据图9的合成电压矢量,先后分别注入对应的正、反等幅等时的脉冲电压,然后通过式(25)、式(26)分别判断各自旋转坐标下d轴电流响应的幅值大小来确定最终两台电机的转子初始位置qr1est和qr2est。
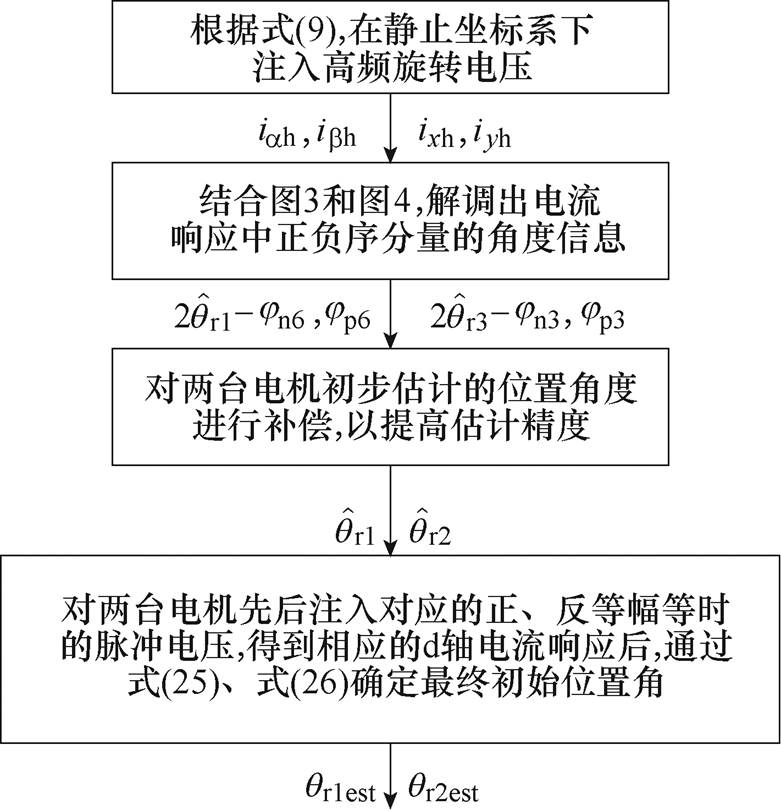
图10 解耦观测流程
Fig.10 Flow diagram of decoupled observation
本文对所提的利用一台逆变器对两台串联PMSM的转子初始位置角解耦观测进行实验研究。两台PMSM参数见表2,该系统采用一台六相逆变器驱动两台电机,两台PMSM均与装有增量式编码器的他励直流电机同轴相连,其中直流电机与滑动变阻器相连充当负载。六相逆变器的驱动信号由TMS320F2812为核心的控制板产生,控制周期为50ms,逆变器六相电流及直流母线电压由霍尔传感器采样获得,具体的实验样机实物如图11所示。
表2 六相和三相PMSM参数
Tab.2 Data of six-phase and three-phase PMSM
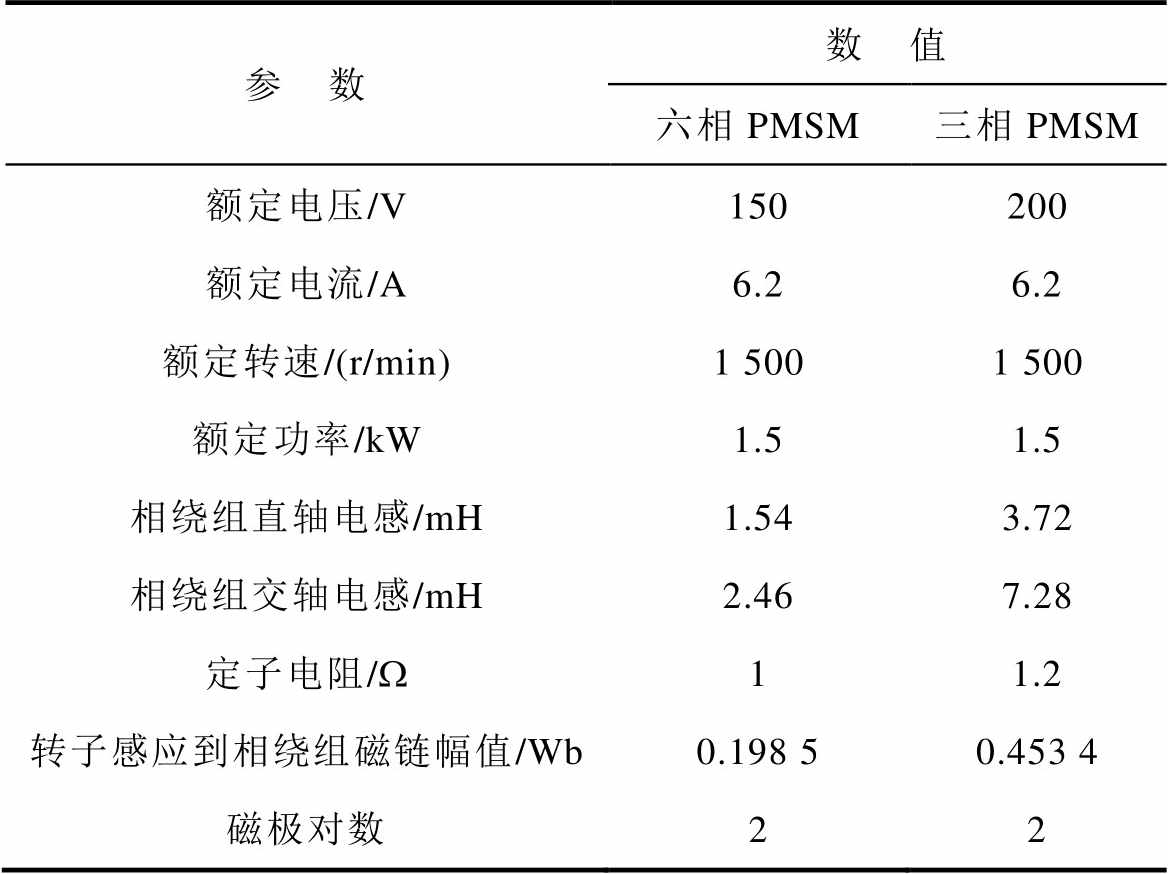
参 数数 值 六相PMSM三相PMSM 额定电压/V150200 额定电流/A6.26.2 额定转速/(r/min)1 5001 500 额定功率/kW1.51.5 相绕组直轴电感/mH1.543.72 相绕组交轴电感/mH2.467.28 定子电阻/W11.2 转子感应到相绕组磁链幅值/Wb0.198 50.453 4 磁极对数22
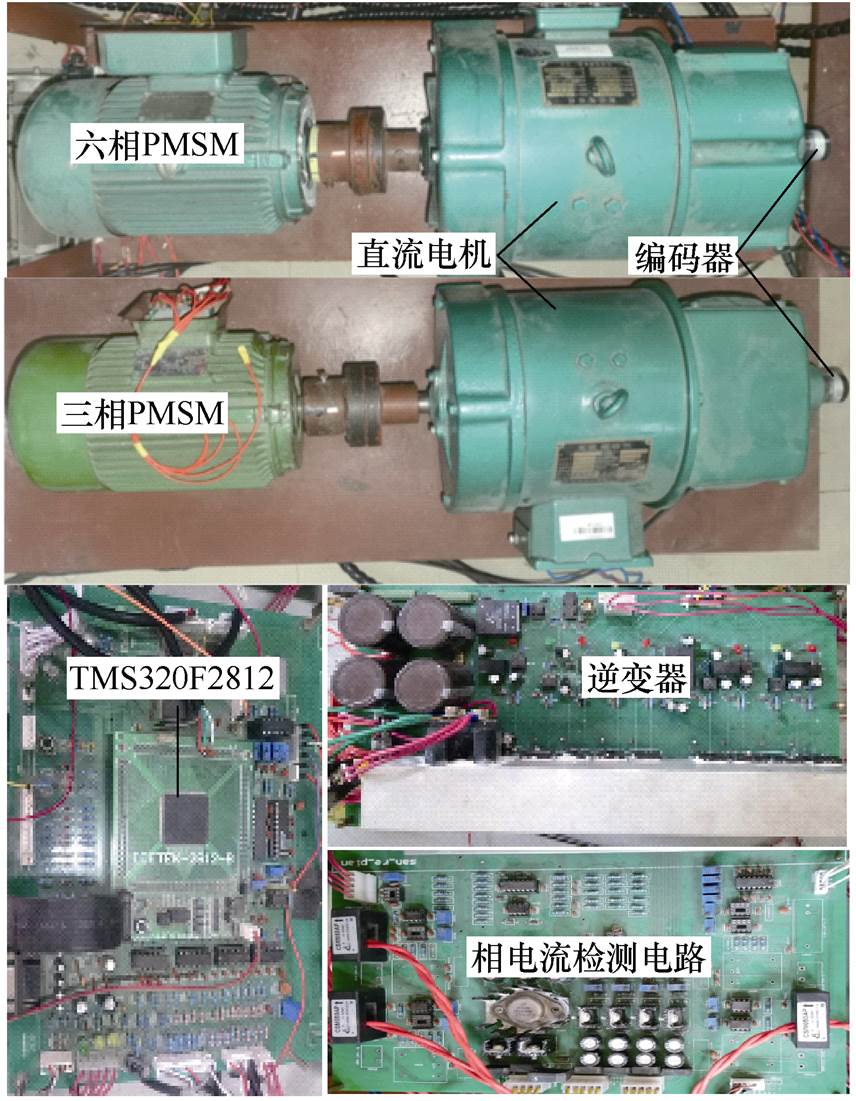
图11 实验样机
Fig.11 The photos of experimental prototype
根据2.4节所述的解耦观测流程,用于旋转高频电压注入的初步转子初始位置角估计时间为2 s;将两台电机初步解耦观测得到的转子位置角和,根据表1选择对应扇区的合成脉冲电压矢量用于极性判断,而极性判断的脉冲电压矢量注入为16个控制周期,即800 ms。图12给出实验结果,两台电机在0 °~360 °选取18个位置经行估计。实验结果表明,未经补偿的六相PMSM估计误差绝对值的平均值为10.89 °,三相PMSM为5.59 °;经过补偿后六相PMSM估计误差绝对值的平均值为3.72 °,三相PMSM为1.81 °。可以看出,本文所用的补偿方法对提高估计精度具有一定的效果。
两台电机转子位置角分别为0 °和180 °时,向六相PMSM注入m1和m2合成脉冲电压矢量,向三相PMSM注入n1和n2合成脉冲电压矢量。每个脉冲只注入一次,得到对应的d轴电流响应id1和id2,极性判断的电流响应如图13所示。qr1=0°和qr2=0°时,由m2脉冲电压矢量引起的电流响应幅值比m1大1.8 A;由n2脉冲电压矢量引起的电流响应幅值比n1大0.5 A。qr1=180 °和qr2=180 °时,由m2脉冲电压矢量引起的电流响应幅值比m1小1.7 A;由n2脉冲电压矢量引起的电流响应幅值比n1小0.4 A。实验结果表明,对于六相串联三相浅磁饱和PMSM的极性判断结果与传统单台PMSM相反。
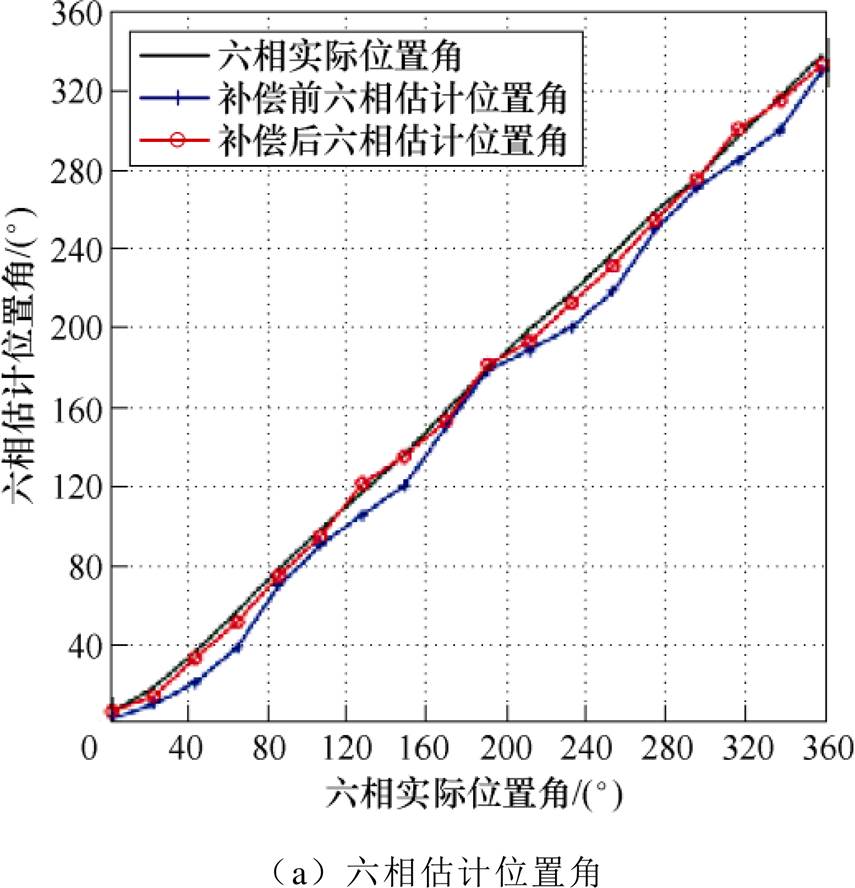
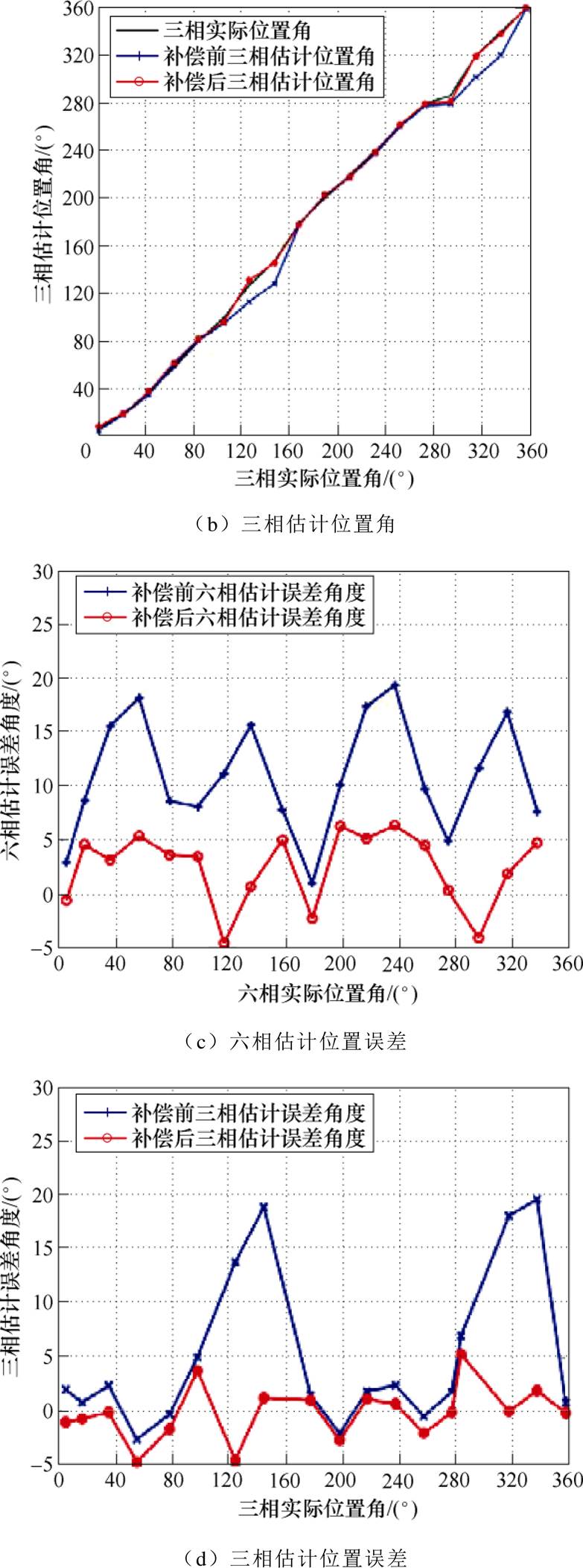
图12 两台电机位置估计实验结果
Fig.12 Experimental results of position estimation of two motors
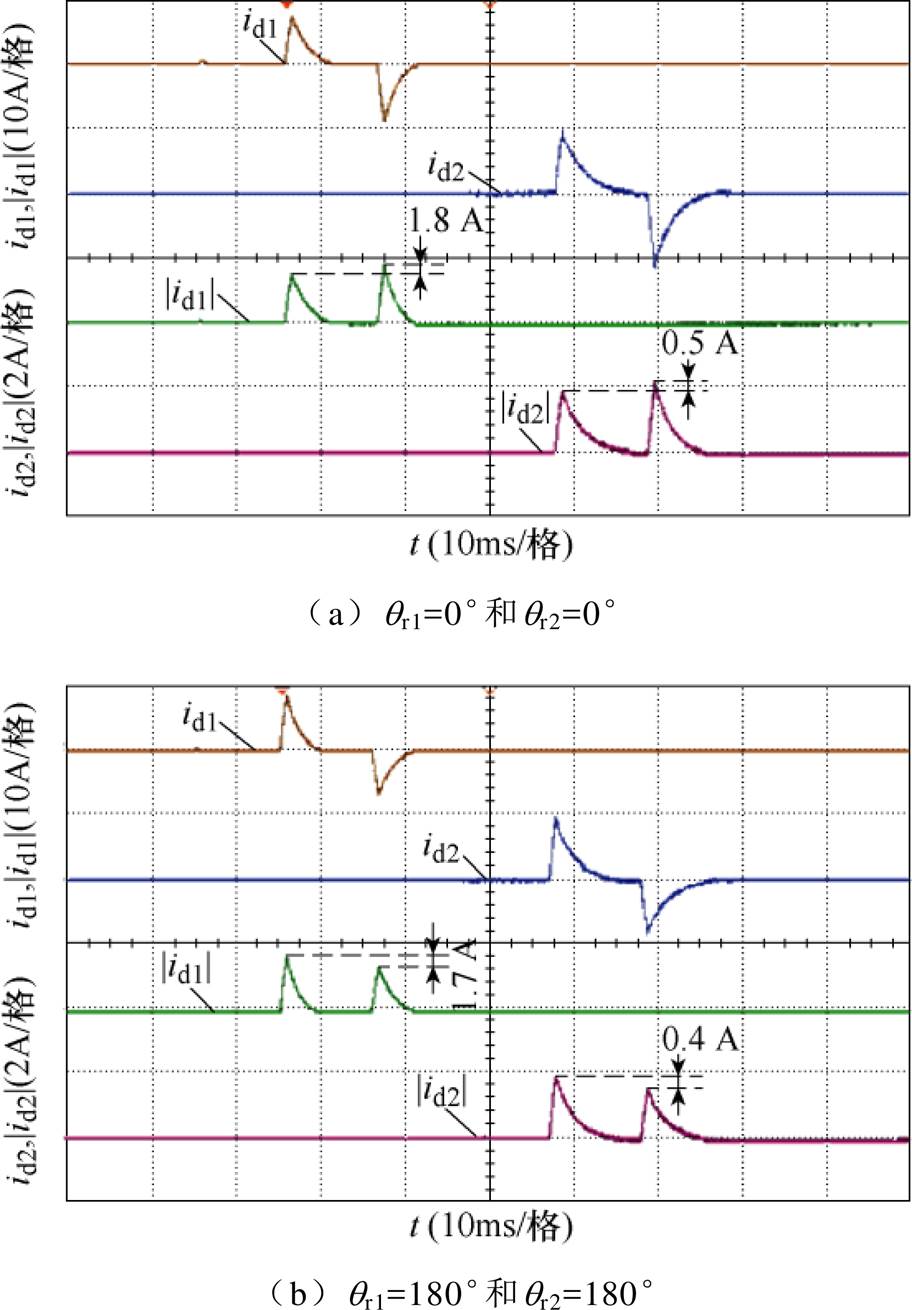
图13 极性判断的电流响应
Fig.13 Current response for polarity judgment
图14给出两台电机的解耦实验,从图中可以看出,当改变六相PMSM的转子位置角从156 °到338 °时,三相PMSM估计位置角有轻微的波动,但没有造成太大影响。同理改变三相PMSM的转子位置角从60 °到260 °时,对六相PMSM的估计位置角并未造成影响。实验表明,本文所提方法能实现对两台电机的转子初始位置角解耦观测。
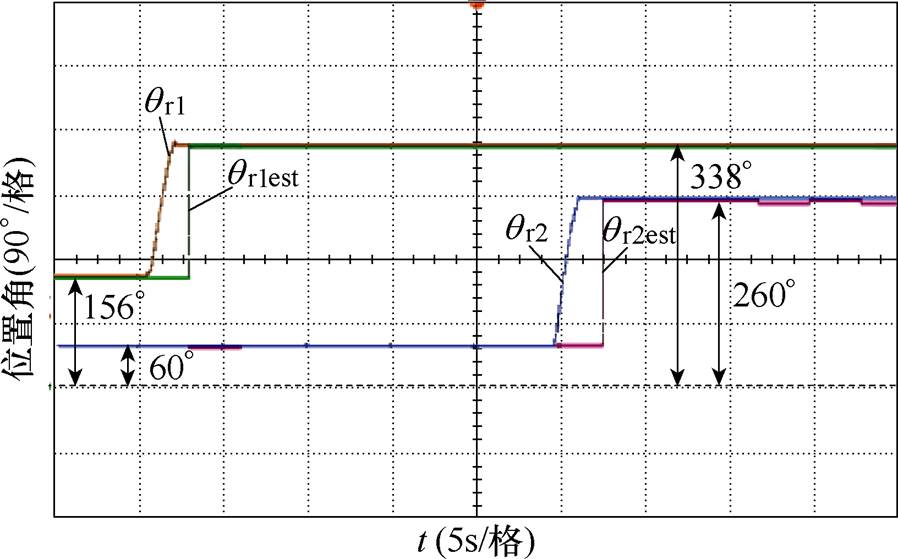
图14 解耦实验
Fig.14 Decoupling experiment
图15为六相PMSM静止在qr1=240 °时,给定转速400 r/min,带4.8 N·m负载起动波形。图16为三相PMSM静止在qr2=330 °时,给定转速300 r/min,带1.8 N·m负载起动波形。实验采用文献[24]直接转矩控制算法,起动前两台电机的转子初始位置角由本文所提方法获得,起动后由编码器测得。从实验结果看出,在两台电机获得估计的转子初始位置角信息后,均能同时平稳起动。
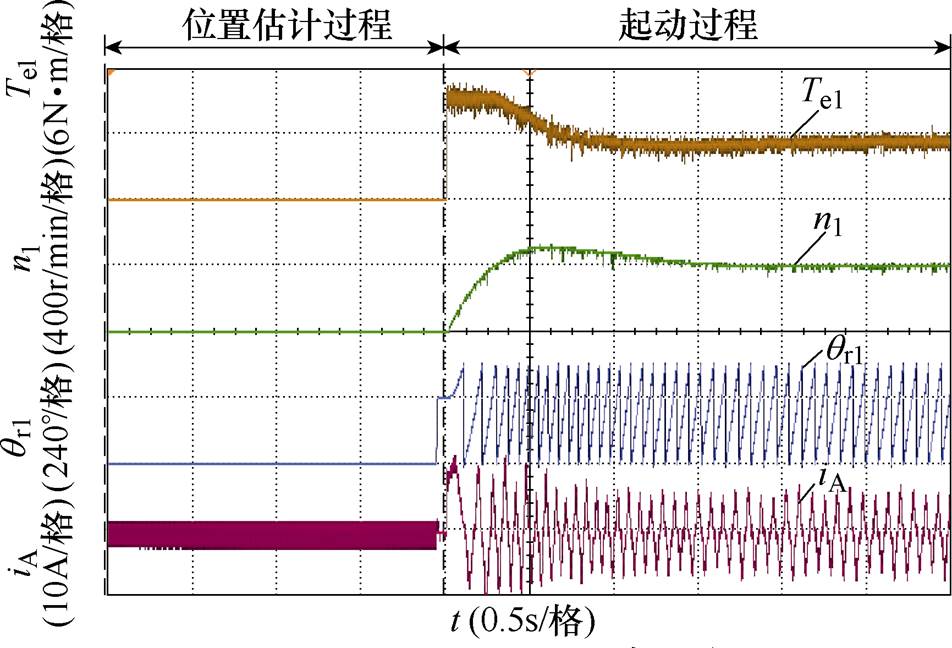
图15 六相PMSM带载起动实验
Fig.15 Six-phase PMSM start-up with load
本文对六相串联三相永磁同步电机提出了基于旋转高频电压注入的转子初始位置解耦观测方法。从理论分析到实验研究,可得出如下的结论:
1)根据理论分析,在静止坐标系ab 和xy下注入旋转高频电压可以在对应电流响应的负序分量中解耦观测得到两台电机的转子初始位置角。并利用电流响应中正序分量解调得到的误差角对估计的位置角进行补偿,提高估计精度。
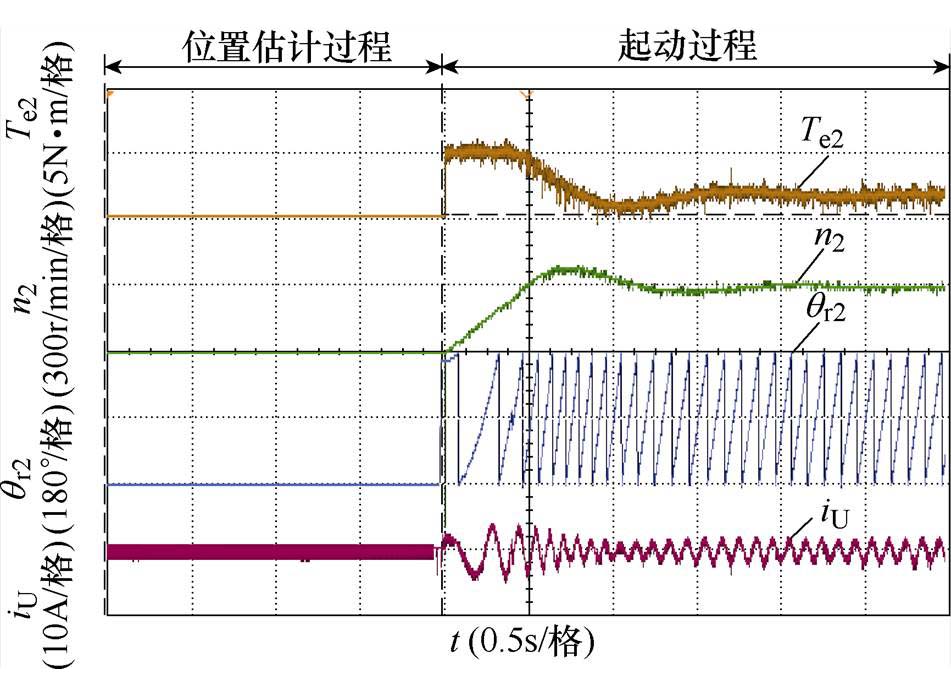
图16 三相PMSM带载起动实验
Fig.16 Three-phase PMSM start-up with load
2)利用串联系统中两台电机的浅磁饱和特性,在极性判断中通过正向电流响应幅值小于反向电流响应幅值的现象来进行判断。
3)实验结果表明,六相PMSM和三相PMSM的转子初始位置估计误差绝对值的平均值为3.72 °和1.81 °。使用估计得到的位置角可以同时带载起动两台电机,过程平稳。
参考文献
[1] Levi E. Multiphase electric machines for variable- speed applications[J]. IEEE Transactions on Indu- strial Electronics, 2008, 55(5): 1893-1909.
[2] 顾理成, 陈前, 赵文祥, 等. 五相永磁容错电机的相间短路容错控制[J]. 电工技术学报, 2022, 37(8): 1972-1981.
Gu Licheng, Chen Qian, Zhao Wenxiang, et al. Inter- phase short-circuit fault-tolerant control for five- phase permanent magnet fault-tolerant motors[J]. Transactions of China Electrotechnical Society, 2022, 37(8): 1972-1981.
[3] Suhel S M, Maurya R. A new switching sequences of SVPWM for six-phase induction motor with features of reduced switching losses[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(2): 100- 107.
[4] 赵勇, 黄文新, 林晓刚, 等. 基于权重系数消除和有限控制集优化的双三相永磁容错电机快速预测直接转矩控制[J]. 电工技术学报, 2021, 36(1): 3- 14.
Zhao Yong, Huang Wenxin, Lin Xiaogang, et al. Fast predictive direct torque control of dual three-phase permanent magnet fault tolerant machine based on weighting factor elimination and finite control set optimization[J]. Transactions of China Electrotech- nical Society, 2021, 36(1): 3-14.
[5] Xiao Zhicai, Wang Jing, Liu Huasong, et al. Active disturbance rejection control strategy for symmetrical six-phase and three-phase PMSM two-motor series- connected system[C]//2015 12th IEEE International Conference on Electronic Measurement & Instru- ments (ICEMI), Qingdao, 2016: 1354-1358.
[6] Saadeh O, Dalbah M, Dalala Z. Control of two five- phase parallel connected single source motor drives under balanced and unbalanced conditions[C]//2018 9th IEEE International Symposium on Power Elec- tronics for Distributed Generation Systems (PEDG), Charlotte, NC, USA, 2018: 1-6.
[7] 赵文祥, 刘桓, 陶涛, 等. 基于虚拟信号和高频脉振信号注入的无位置传感器内置式永磁同步电机MTPA控制[J]. 电工技术学报, 2021, 36(24): 5092- 5100.
Zhao Wengxiang, Liu Huan, Tao Tao, et al. MTPA control of sensorless IPMSM based on virtual signal and high-frequency pulsating signal injection[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5092-5100.
[8] 阙鸿杰, 全力, 张丽, 等. 基于自适应滤波器在线解耦的磁场增强型永磁电机无位置传感器控制[J]. 电工技术学报, 2022, 37(2): 344-354.
Que Hongjie, Quan Li, Zhang Li, et al. Sensorless control of flux-intensifying permanent magnet synchronous motor based on adaptive Notch filter online decoupling[J]. Transactions of China Electro- technical Society, 2022, 37(2): 344-354.
[9] Chen H C, Hsu C H, Chang Dakai. Speed control for two series-connected five-phase permanent-magnet synchronous motors without position sensor[C]//2016 IEEE 25th International Symposium on Industrial Electronics (ISIE), Santa Clara, CA, USA, 2016: 198-203.
[10] 刘陵顺, 苗正戈, 张海洋. 基于EKF对称六相PMSM两电机串联系统研究[J]. 船电技术, 2012, 32(1): 1-4.
Liu Lingshun, Miao Zhengge, Zhang Haiyang. Research on speed sensorless control of symmetrical six-phase PMSM system with series-connected based on EKF[J]. Marine Electric & Electronic Engineering, 2012, 32(1): 1-4.
[11] Leppanen V M, Luomi J. Observer using low- frequency injection for sensorless induction motor control-parameter sensitivity analysis[J]. IEEE Transactions on Industrial Electronics, 2006, 53(1): 216-224.
[12] 王亚伟, 章玮. 转子微动状态下永磁同步电机初始位置检测[J]. 电机与控制学报, 2021, 25(5): 1-6.
Wang Yawei, Zhang Wei. Initial position estimation for permanent magnet synchronous motors based on rotor micro-movement[J]. Electric Machines and Control, 2021, 25(5): 1-6.
[13] 杨健, 杨淑英, 李浩源, 等. 基于旋转高频电压注入的永磁同步电机转子初始位置辨识方法[J]. 电工技术学报, 2018, 33(15): 3547-3555.
Yang Jian, Yang Shuying, Li Haoyuan, et al. Initial rotor position estimation for IPMSM based on high frequency rotating voltage injection[J]. Transactions of China Electrotechnical Society, 2018, 33(15): 3547-3555.
[14] Liu Jiaming, Zhu Z Q. Sensorless control strategy by square-waveform high-frequency pulsating signal injection into stationary reference frame[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2014, 2(2): 171-180.
[15] 韦鲲, 金辛海. 表面式永磁同步电机初始转子位置估计技术[J]. 中国电机工程学报, 2006, 26(22): 104-109.
Wei Kun, Jin Xinhai. Initial rotor position estimate technique on surface mounted permanent magnet synchronous motor[J]. Proceedings of the CSEE, 2006, 26(22): 104-109.
[16] 彭威, 乔鸣忠, 蒋超, 等. 基于正序分量在线位置误差补偿的旋转高频注入法[J]. 电工技术学报, 2020, 35(24): 5087-5095.
Peng Wei, Qiao Mingzhong, Jiang Chao, et al. An online position error compensation method of rotating high-frequency injection based on positive sequence components[J]. Transactions of China Electrotech- nical Society, 2020, 35(24): 5087-5095.
[17] 陈光团, 周扬忠. 六相串联三相双永磁同步电机预测型直接转矩控制研究[J]. 中国电机工程学报, 2018, 38(15): 4526-4536, 4653.
Chen Guangtuan, Zhou Yangzhong. Research on a predictive direct torque control for the drive control system of six-phase PMSM and three-phase PMSM in series[J]. Proceedings of the CSEE, 2018, 38(15): 4526-4536, 4653.
[18] 高健伟. 基于高频注入法的永磁同步电机转子位置估计误差的分析[D]. 济南: 山东大学, 2012.
[19] 殷进军. LCL滤波并网逆变器的数字单环控制技术研究[D]. 武汉: 华中科技大学, 2012.
[20] Lin T C, Zhu Z Q. Sensorless operation capability of surface-mounted permanent-magnet machine based on high-frequency signal injection methods[J]. IEEE Transactions on Industry Applications, 2015, 51(3): 2161-2171.
[21] 万山明, 吴芳, 黄声华. 基于高频电压信号注入的永磁同步电机转子初始位置估计[J]. 中国电机工程学报, 2008, 28(33): 82-86.
Wan Shanming, Wu Fang, Huang Shenghua. Initial rotor position estimation of permanent magnet synchronous motor based on high frequency voltage signal injection method[J]. Proceedings of the CSEE, 2008, 28(33): 82-86.
[22] 鲁家栋, 刘景林, 卫丽超. 永磁同步电机转子初始位置检测方法[J]. 电工技术学报, 2015, 30(7): 105- 111.
Lu Jiadong, Liu Jinglin, Wei Lichao. Estimation of the initial rotor position for permanent magnet syn- chronous motors[J]. Transactions of China Electro- technical Society, 2015, 30(7): 105-111.
[23] 吴京周, 周扬忠, 钟天云. 反电动势三次谐波高占比五相永磁同步电动机转子初始位置估计方法[J]. 中国电机工程学报, 2022, 42(9): 3422-3432.
Wu Jingzhou, Zhou Yangzhong, Zhong Tianyun. Initial rotor position estimation method for five phase PMSM with high proportion of third harmonic back EMF[J]. Proceedings of the CSEE, 2022, 42(9): 3422-3432.
[24] 段庆涛, 周扬忠, 屈艾文. 六相串联三相PMSM缺相容错型低转矩脉动直接转矩控制[J]. 中国电机工程学报, 2019, 39(2): 347-358, 632.
Duan Qingtao, Zhou Yangzhong, Qu Aiwen. Open- circuit fault-tolerant direct torque control with low torque ripple for six-phase and three-phase PMSM series-connected system[J]. Proceedings of the CSEE, 2019, 39(2): 347-358, 632.
Abstract In reality, through the special winding connection mode, it can be realized that only one set of driving systems controls the series or parallel decoupling and independent operation of multiple multiphase motors. It not only reduces the size of the system, but also saves much cost of designing the drive system. As the number of motors increases, the number of encoders used to detect rotor position angle and speed increases, and the cost increases. Therefore, sensorless control technology has become the main research direction in the field of motor control for pursuing low cost and high control accuracy. For permanent magnet synchronous motors (PMSM), especially six-phase series three-phase double motor systems, accurate decoupling observation of initial rotor position is the first step to realizing sensorless control of dual motors and the key to ensuring a smooth start. Therefore, this paper proposes a method of rotating high-frequency voltage injection to realize the decoupling observation of the initial rotor position of a six-phase series three-phase PMSM system.
Firstly, rotating high-frequency voltages are injected simultaneously in the six-phase and three-phase planes, and the preliminary rotor position angles of the two motors are obtained by demodulating the negative sequence components of their current responses. Secondly, to improve the estimation accuracy, the error angle contained in the positive sequence component of the current response is extracted and used to compensate for the rotor position angle. In addition, the two motors are designed as shallow magnetic saturated PMSM to prevent the over-current caused by magnetic circuit saturation. When the pulse voltage of equal amplitude and width is applied to the positive and negative sides of d-axis, the current response amplitude of the d-axis forward is smaller than that of the reverse. Consequently, the polarity of the magnetic poles of the two motors is judged. As a result, the decoupled observation of the two motors’ rotor initial position is completed.
An experimental study was carried out on a set of six-phase series three-phase PMSM systems. In the experiment, 18 positions of the two motors were randomly selected for estimation. Without compensation, the experimental results show that the average of the absolute value of the estimation error of the six-phase PMSM is 10.89 °, and that of the three-phase PMSM is 5.59 °. After compensation, the value of the six-phase PMSM is 3.72 °, and that of the three-phase PMSM is 1.81 °. It shows that the compensation method can improve observation accuracy. The rotor polarity judgment of the two motors at 0 ° and 180 ° is also studied. The results show that for shallow magnetic saturation PMSM, the phenomenon that the amplitude of the d-axis forward current response is smaller than that of reverse can be used to complete the rotor polarity judgment. It is consistent with the current-time curve fitted by the finite element simulation.
The following conclusions can be drawn: (1) The error angle obtained from the positive sequence component in the current response is used to compensate for the rotor position angle obtained from the negative sequence component, which improves the estimation accuracy. (2) Based on the shallow magnetic saturation characteristic, the rotor polarity of the two motors is judged by the phenomenon that the current response amplitude of the d-axis forward is smaller than that of the reverse. (3) Experimental results show that the estimated position angle can be used to start two motors simultaneously with load, and the process is stable.
keywords:Six-phase and three-phase permanent magnet synchronous motor (PMSM) series-connected system, rotating high-frequency voltage, shallow magnetic saturation, initial position of rotor, decoupling observation
DOI: 10.19595/j.cnki.1000-6753.tces.220573
中图分类号:TM921.51
收稿日期 2022-04-14
改稿日期 2022-07-20
陈 涛 男,1997年生,硕士研究生,研究方向为现代调速系统。E-mail: 1426172711@qq.com
周扬忠 男,1971年生,博士,教授,博士生导师,研究方向为现代调速系统、新能源发电系统。E-mail: zhty_75313@sina.com(通信作者)
(编辑 崔文静)