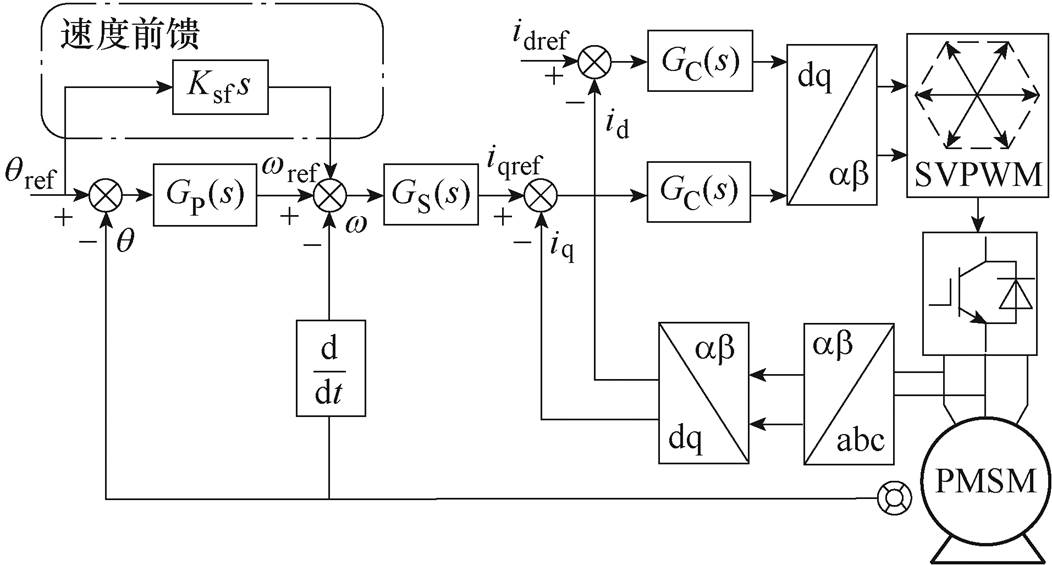
图1 三环结构框图
Fig.1 Block diagram of the three-closed-loop structure
摘要 为提高位置伺服系统轨迹跟踪精度及极限带宽,该文研究了一种位置-电流双环伺服结构,其位置控制采用结合相位超前环节的比例积分控制器(PI-Lead)。首先,探讨了P-PI-PI和PI-P-PI两种传统三环位置控制结构在轨迹跟踪精度上存在的局限,研究了速度前馈提升精度的机理及问题;然后,证明了PI-Lead双环结构相位超前环节对维持系统稳定的意义,详细分析了低通滤波器对系统性能的影响及其参数设计方法,给出了PI-Lead双环位置伺服系统基于闭环频域指标的参数整定策略;最后,对比分析了双环结构与传统三环结构的特点,推导了三种结构的位置极限带宽。实验结果表明,PI-Lead双环结构无需任何前馈补偿即可基本消除系统动态跟踪误差,并具有更高的位置环极限带宽。此外,由于减少了速度控制环节,其无需速度测量且参数整定更加简单。
关键词:永磁同步电机 无速度环位置伺服 动态跟踪误差 参数整定策略
交流位置伺服系统被广泛应用于光刻机、激光雷达、航空航天等领域[1-2]。如何进一步提升高精度位置伺服系统的轨迹跟踪精度和动态响应速度已成为研究的重点与难点之一[3]。
位置-速度-电流三环嵌套式结构在位置伺服系统中被广泛使用[4]。但对于一些位置轨迹跟踪精度要求严格的场合,一方面,速度环节会为系统引入一个大惯性延时环节,影响系统的动态响应性能;另一方面,受编码器精度与转速测量方法的影响,转速量化误差会直接影响系统的轨迹跟踪精度。
针对此问题,文献[5]在传统三环结构的基础上,为系统引入速度前馈与加速度前馈补偿环节,提高了系统的跟踪精度。但前馈量的获取需要对位置指令微分处理,指令中所含的阶跃分量及高频噪声将被放大,严重降低了系统的轨迹跟踪精度。当负载、位置指令变化时,前馈增益需重新整定,以增强轨迹跟踪能力。为此,文献[6]提出一种基于微分观测器的高信噪比数字前馈补偿方法,提高了伺服系统的前馈补偿效果。文献[7]将自适应滑模控制与迭代学习控制结合进行前馈补偿,以改善位置伺服系统的轨迹跟踪精度与鲁棒性,但算法复杂度增加。
上述方法均在位置-速度-电流三环嵌套式结构基础上增加前馈环节,减小位置伺服系统的跟踪误差。但速度环引起的系统延时、前馈量难以准确获取以及前馈系数整定复杂等问题依然存在。因此,众多学者以不使用前馈补偿为目标,通过改变位置伺服系统控制结构来实现高精度轨迹跟踪:一种为取消速度环,外环采用位置控制,内环采用电流控制的双闭环位置伺服系统[8-9];另一种则将位置、速度控制器一体化作为外环复合控制器,电流环仍作为内环的控制结构[10-11]等。文献[8]将一种采用比例微分(Proportional Derivative, PD)位置控制器的位置-电流嵌套式控制结构应用于机器人伺服系统中,使系统响应更迅速。文献[9]采用了全数字双环位置伺服系统,解决了三环结构中速度环滞后严重的问题,满足了更高的位置轨迹跟踪精度及动态响应性能的要求。文献[10-11]采用非线性控制策略,提高了系统的鲁棒性与跟踪精度,但算法较为复杂,有待进一步改进。此外,现有文献对于双环结构与传统三环结构的对比分析相对有限[9],轨迹跟踪精度更高、位置控制器含有积分环节的情况尚未被对比研究。
事实上,由于早期的模拟器件和运算放大器并不能实现理想的微分环节,工程师和学者们通常采用PI-Lead控制器来代替PID控制器[12]。近些年,随着数字化离散控制的发展,微分环节虽然可在数字控制芯片上通过离散化方法转换为差分方程实现,但放大了系统高频噪声,影响控制性能,因此PI-Lead控制作为一种简单实用的工业级算法,依然得到研究人员的广泛关注,例如,文献[13]基于PI-Lead控制结构,提出了一种自适应迭代学习控制方案,并在晶圆平台中成功应用,但其对于PI-Lead结构的机理分析相对有限。文献[14]在硬盘驱动伺服系统中采用PI-Lead结构与陷波滤波器结合的方式,实现了对磁盘振动的抑制。文献[12]将PI-Lead结构应用于永磁同步电机的控制当中,并提出基于开环截止频率的控制器参数整定方法,但物理意义更加明确的基于位置闭环带宽的控制器参数整定方法及结构中低通滤波器截止频率的选择策略仍然存在研究空间。除伺服系统外,PI-Lead控制器因其相位超前及抑制高频噪声的特性,也被广泛应用于其他领域,如蓄电池储能系统[15]、电力电子领域的升压变换器[16]、降压变换器[17]等应用中。
针对以上问题,本文首先分析了P-PI-PI三环结构(位置环采用比例,速度环和电流环采用比例积分控制)与PI-P-PI三环结构(位置环电流环采用比例积分,速度环采用比例控制)的特点,证明了其在轨迹跟踪精度上的局限,同时分析了传统三环结构增加速度前馈提升精度的机理及存在的问题。然后,详细推导了PI-Lead双环位置伺服系统控制结构的转变过程,阐述了相位超前环节对维持双环系统稳定的意义,重点分析了低通滤波器不同截止频率对系统性能的影响,为兼顾高频噪声抑制能力与系统稳定性,给出了低通滤波器参数设计范围。为简化双环结构参数整定过程并明确参数物理意义,在低通滤波器截止频率整定基础上,本文推导了PI-Lead双环结构基于闭环频域指标的参数整定策略。最后,通过理论分析与实验验证,证明了双环结构相比于两种传统三环结构的优越性,其在无需任何前馈补偿下即可消除动态跟踪误差;同时由于双环结构减少了速度环节,使得伺服系统参数整定更加简便;极限带宽的推导与实验证明了双环结构具有更高的位置极限带宽。
由于位置-速度-电流三环结构是伺服系统中最基本的控制结构,根据各环路控制器的不同,本节以P-PI-PI三环结构以及PI-P-PI三环结构为例,分析两者的闭环频域参数整定方法及各自的优缺点。
传统位置-速度-电流三环结构控制框图如图1所示,本文涉及的各项参数及含义见表1。三环结构中电流控制器GC(s)一般采用PI控制,GP(s)、GS(s)可在P、PI控制间进行取舍。
图1 三环结构框图
Fig.1 Block diagram of the three-closed-loop structure
表1 系统参数及其含义
Tab.1 Parameters description of system
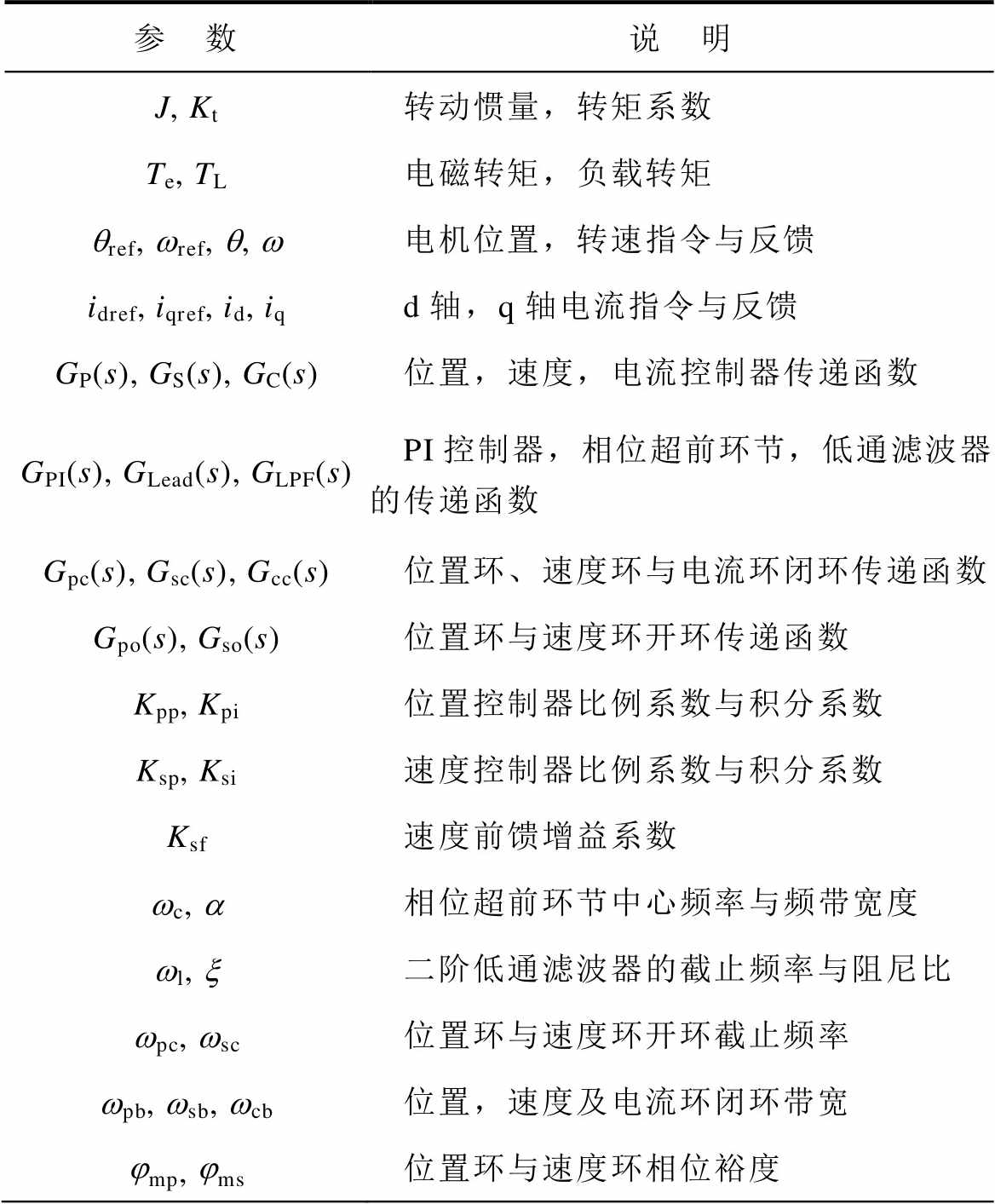
参 数说 明 J, Kt转动惯量,转矩系数 Te, TL电磁转矩,负载转矩 qref, wref, q, w电机位置,转速指令与反馈 idref, iqref, id, iqd轴,q轴电流指令与反馈 GP(s), GS(s), GC(s)位置,速度,电流控制器传递函数 GPI(s), GLead(s), GLPF(s)PI控制器,相位超前环节,低通滤波器的传递函数 Gpc(s), Gsc(s), Gcc(s)位置环、速度环与电流环闭环传递函数 Gpo(s), Gso(s)位置环与速度环开环传递函数 Kpp, Kpi位置控制器比例系数与积分系数 Ksp, Ksi速度控制器比例系数与积分系数 Ksf速度前馈增益系数 wc, a相位超前环节中心频率与频带宽度 wl, x二阶低通滤波器的截止频率与阻尼比 wpc, wsc位置环与速度环开环截止频率 wpb, wsb, wcb位置,速度及电流环闭环带宽 jmp, jms位置环与速度环相位裕度
(续)
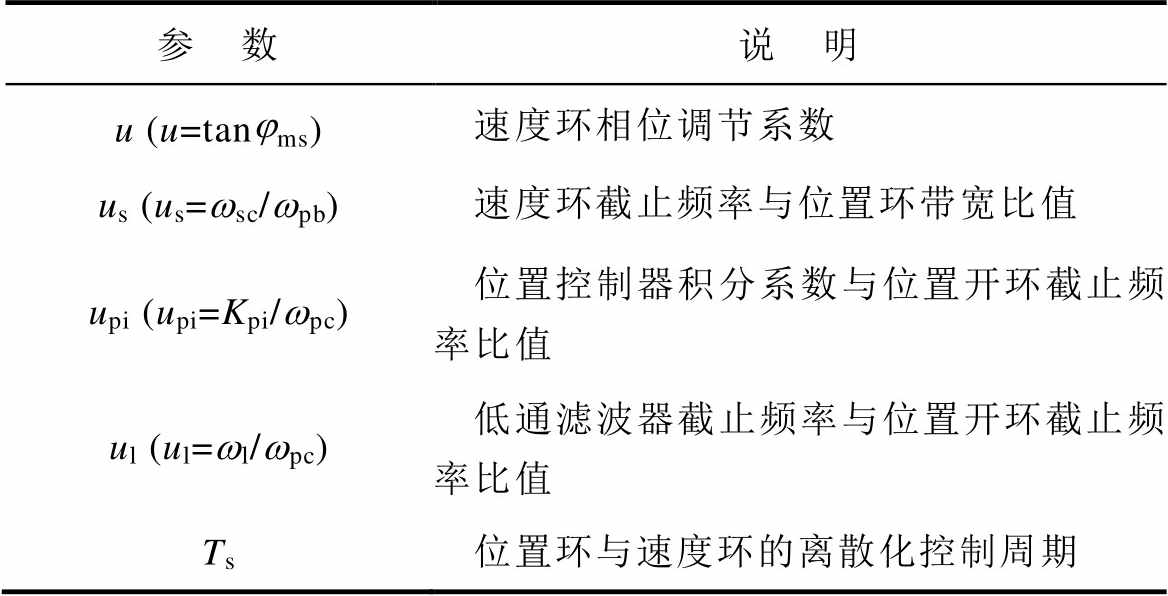
参 数说 明 u (u=tanjms)速度环相位调节系数 us (us=wsc/wpb)速度环截止频率与位置环带宽比值 upi (upi=Kpi/wpc)位置控制器积分系数与位置开环截止频率比值 ul (ul=wl/wpc)低通滤波器截止频率与位置开环截止频率比值 Ts位置环与速度环的离散化控制周期
本节首先讨论P-PI-PI三环结构,对于表贴式永磁同步电机,d轴电流采用id=0控制方式,三环简化控制框图如图2所示。

图2 三环简化控制框图
Fig.2 Simplified block diagram of three-loop structure
由于电流环带宽远高于速度环带宽,本文将电流闭环传递函数等效为1分析。P-PI-PI三环结构中速度和位置控制器的传递函数可表示为
 (1)
(1)
由闭环传递函数幅值衰减0.707的闭环带宽定义,可得速度环闭环频域参数整定公式为
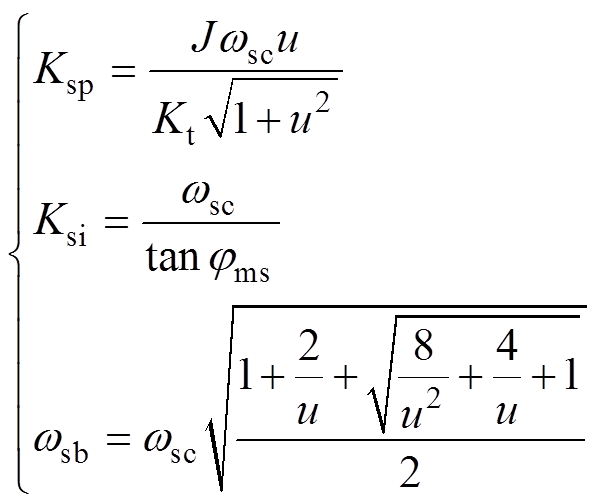 (2)
(2)
位置环开环传递函数Gpo(s)为
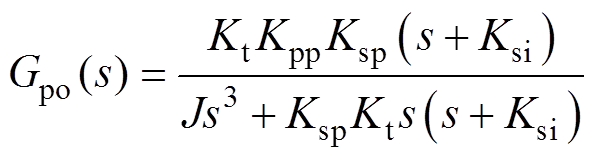 (3)
(3)
同样由闭环带宽定义,得位置控制器参数为
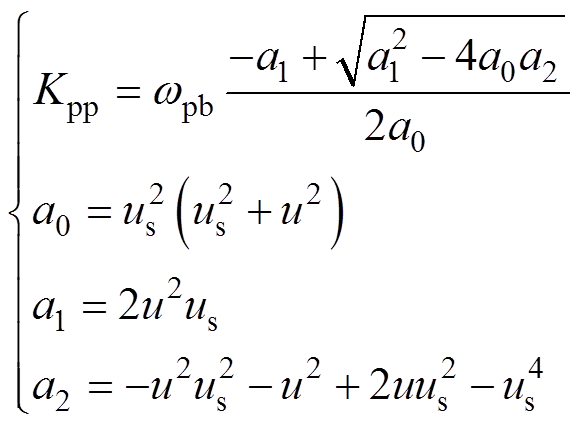 (4)
(4)
式中,a0、a1、a2为辅助变量。由此,系统可按照期望的相位裕度和闭环带宽配置P-PI-PI控制器参数。由式(3)可知,P-PI-PI三环结构为Ⅰ型系统,当位置指令为匀速的斜坡信号时,存在恒定的稳态位置误差,因此需要进行改进。
为消除稳态误差,可为P-PI-PI三环结构引入图1所示的速度前馈,提高其轨迹跟踪能力。三环结构结合速度前馈后的位置开环传递函数Gpo_f(s)为
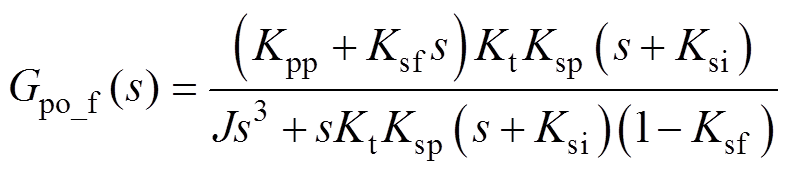 (5)
(5)
结果表明,当三环结构的速度前馈系数Ksf设置为100 %时,系统型号提高,消除了恒转速段的稳态误差,提高了系统轨迹跟踪精度。但一方面,由式(5)可知,前馈系数为任何其他数值时,系统仍为Ⅰ型系统,恒转速段的位置稳态误差仍然存在,因此其轨迹跟踪精度对速度前馈系数敏感;另一方面,由于速度前馈是建立在三环结构基础上的优化算法,因此仍然存在速度环引入的如速度测量噪声及速度控制器参数整定等问题。此外,对只能够获取位置指令信息的伺服控制器而言,速度前馈信号需由位置指令微分获取,额外引入高频噪声问题,影响系统性能,需进一步改进。
为消除位置斜坡指令下P-PI-PI三环结构的稳态误差,除增加速度前馈外,还可采用PI-P-PI三环结构,本文中比例积分控制器均采用式(1)的形式。得到位置环开环传递函数Gpo(s)及速度、位置控制器参数分别为
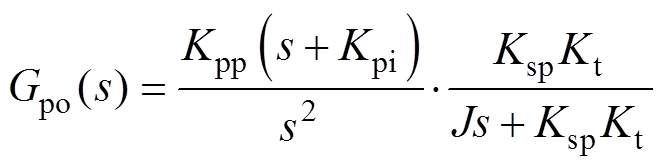 (6)
(6)
 (7)
(7)
根据闭环带宽定义,可得位置期望开环截止频率与位置闭环带宽之间的比值为
 (8)
(8)
从而实现根据期望的位置闭环带宽和相位裕度,从频域的角度明确控制器参数的物理意义,并对控制器参数进行配置。
对比式(3)与式(6)所示的两种三环结构,可得PI-P-PI三环结构为Ⅱ型系统,其无需速度前馈即可实现对匀速指令无稳态误差跟踪,但对于恒加速指令仍然存在稳态误差,因此需要对结构进行改进。
为进一步提高位置伺服系统跟踪精度,本节采用了PI-Lead双环结构,但现有文献对其参数整定与机理分析存在一定局限,因此本节提出一种基于闭环频域指标的参数整定方法,使得参数意义更加明确,同时阐明了相位超前环节与低通滤波器不同截止频率对系统性能的影响。
直接移除图2所示三环结构中的速度环,变为位置-电流双环结构,当位置控制器采用PI控制器GPI(s)时,系统奈奎斯特图如图3中实线所示,曲线顺时针包围(-1, 0)点两圈,由于系统无S右半平面的开环极点,因此系统存在两个不稳定的闭环极点,系统不稳定,需要对位置控制器进行改进。其不稳定的主要原因在于系统积分项过多,导致严重的相位滞后,因此需要在位置控制器中引入相位补偿环节。微分环节虽然具有正90 °的相频特性,能够补偿相位滞后,但其高频增益无穷大的特性,会放大位置传感器量化误差等高频噪声,影响系统的正常工作。因此,可为位置PI控制器串联一个相位超前环节,提高相位裕度,恢复系统稳定。相位超前环节含有一个极点和一个零点,其传递函数表达式GLead(s)[18]为
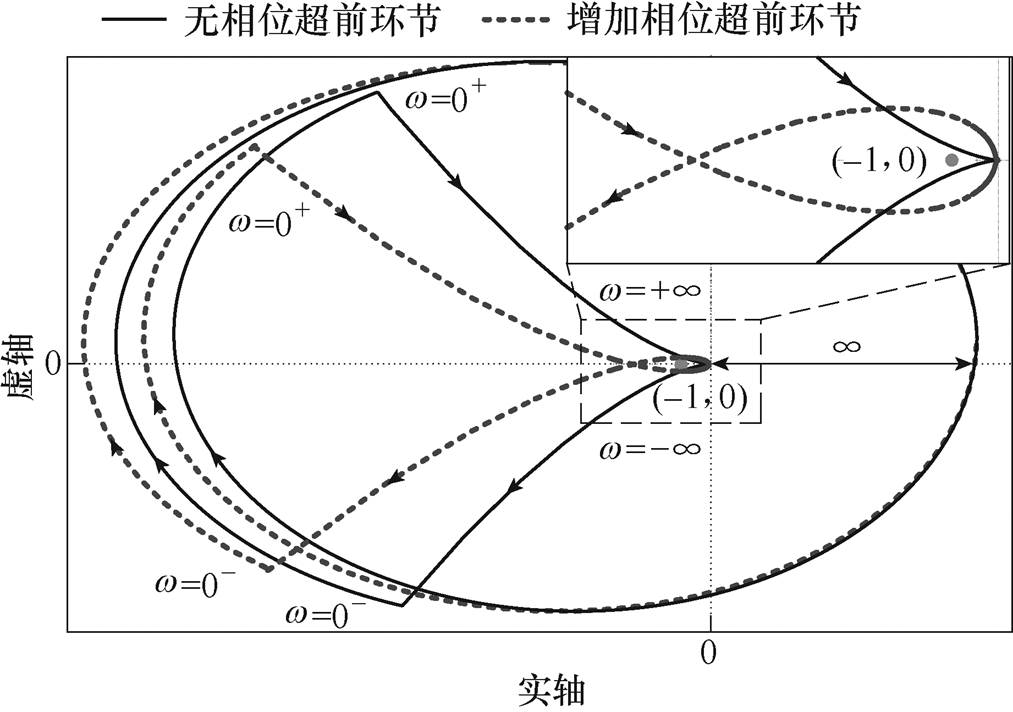
图3 有无相位超前环节的双环结构奈奎斯特图
Fig.3 Nyquist diagram of dual-loop structure with and without phase lead loop
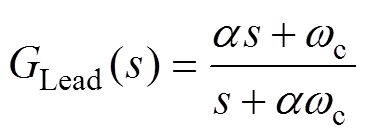 (9)
(9)
将其与位置PI控制器级联,并将wc设置为位置开环期望截止频率wpc,补偿系统相位裕度,使系统恢复稳定。补偿后系统奈奎斯特图如图3中虚线所示,曲线围绕(-1, 0)点顺时针逆时针各旋转一圈,包围(-1, 0)点圈数的代数和为0,系统恢复稳定。
为抑制高频噪声,进一步串联加入二阶巴特沃斯滤波器GLPF(s)。改进后的PI-Lead双环结构控制框图如图4所示。位置控制器的表达式为
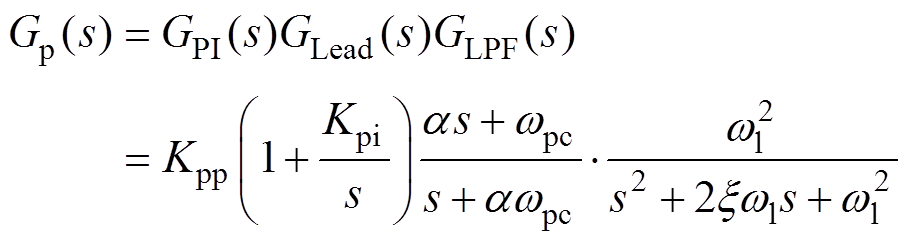 (10)
(10)
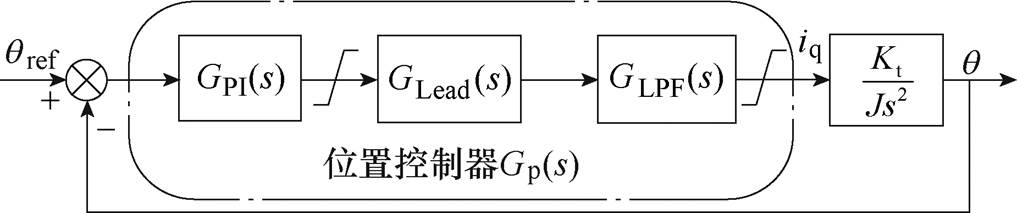
图4 PI-Lead双环结构控制框图
Fig.4 Block diagram of PI-Lead controller structure
系统的开环传函Gpo(s)可以表示为
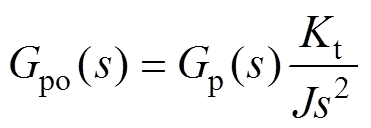 (11)
(11)
综上所述,PI-Lead双环结构减去了三环结构的速度环,通过引入相位超前环节保证系统的稳定,并引入二阶巴特沃斯滤波器,来抑制系统的高频噪声。
低通滤波器虽然能够抑制高频噪声,但存在相位滞后等问题,下面分析低通滤波器不同带宽对系统性能的影响。首先推导低通滤波器对系统稳态精度的影响,双环结构位置稳态跟踪误差为
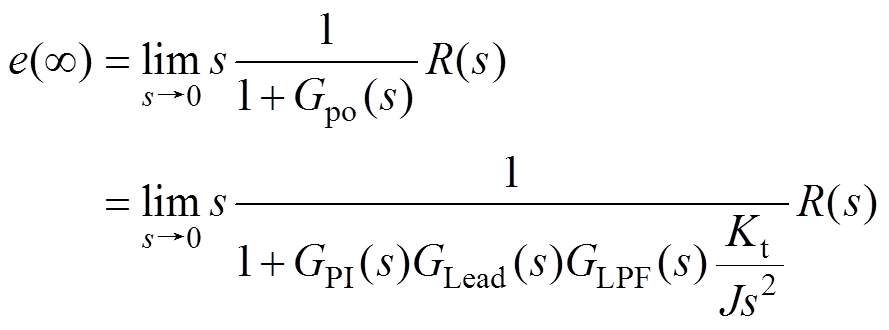 (12)
(12)
式中,R(s)为输入指令信号的拉普拉斯变换。
低通滤波器在s趋近于0时有
 (13)
(13)
由于低通滤波器串联在位置开环传递函数Gpo(s)中,因此由式(13)可知,低通滤波器的引入不会影响式(12)所示的双环结构位置稳态误差。
其次分析低通滤波器对系统带宽与相位裕度的影响,将s=jwpc代入GLPF(s)得到
 (14)
(14)
其引起的相位滞后为
 (15)
(15)
式(15)表明,随着低通滤波器截止频率wl的降低,双环结构开环截止频率wpc处的相位滞后增加,系统相位裕度降低,因此过低的低通滤波器截止频率wl会降低系统稳定性。因此,设计低通滤波器截止频率需要兼顾高频噪声抑制及相位滞后引起的稳定性问题,实际应用中可令式(15)所示的低通滤波器引起的相位裕度滞后小于经验值10 °,可得低通滤波器截止频率设计范围为
 (16)
(16)
由式(14)可得低通滤波器在位置开环截止频率wpc处的幅值为
 (17)
(17)
当低通滤波器截止频率按式(16)所示范围设计时,式(17)的幅值范围为
 (18)
(18)
结果表明,低通滤波器在式(16)所示设计范围对系统开环截止频率处幅值衰减小于0.01,因此低通滤波器对系统开环截止频率的影响可以忽略。
位置开环传递函数在高频段的斜率能够反映系统高频噪声抑制能力。由式(10)和式(11)可得,有无低通滤波器的双环结构在高频段的斜率分别为-80 dB/dec以及-40 dB/dec的衰减,因此采用低通滤波器能够增强系统高频噪声抑制能力,为使低通滤波器充分发挥高频噪声抑制能力,在式(16)的基础上,进一步补充低通滤波器截止频率不超过位置控制器的奈奎斯特频率作为上限约束,即
 (19)
(19)
为验证上述推导的有效性,双环结构中低通滤波器截止频率分别为30倍与5倍位置开环截止频率及无低通滤波器情况下位置开环Bode图如图5所示。
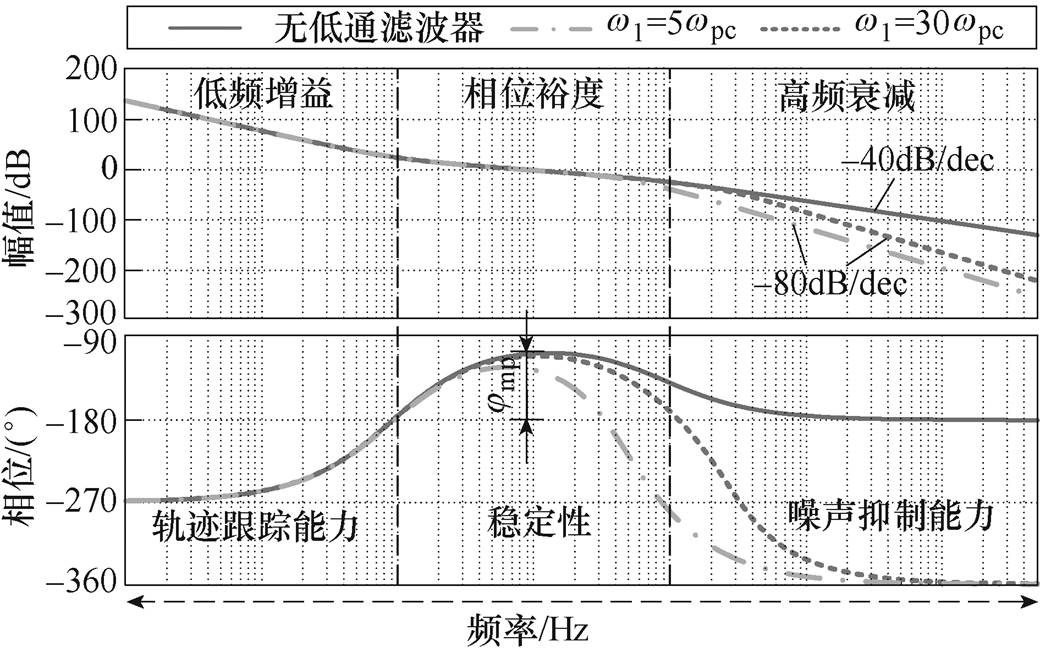
图5 双环结构不同低通滤波器截止频率Bode图
Fig.5 Bode of dual loop structure with different cut-off frequencies of low-pass filter
结果表明,低通滤波器对位置开环Bode图低频段影响较小,因此低通滤波器不会影响双环结构的轨迹跟踪精度;在高频段,引入低通滤波器能够提高幅值衰减斜率由-40 dB/dec到-80 dB/dec,提高系统的高频噪声抑制能力;在中频段,低通滤波器会降低相位裕度,影响稳定性。系统位置开环截止频率受低通滤波器截止频率的影响较小。为兼顾高频噪声抑制能力与稳定性的要求,可按式(16)与式(19)所示的范围设计低通滤波器的截止频率。
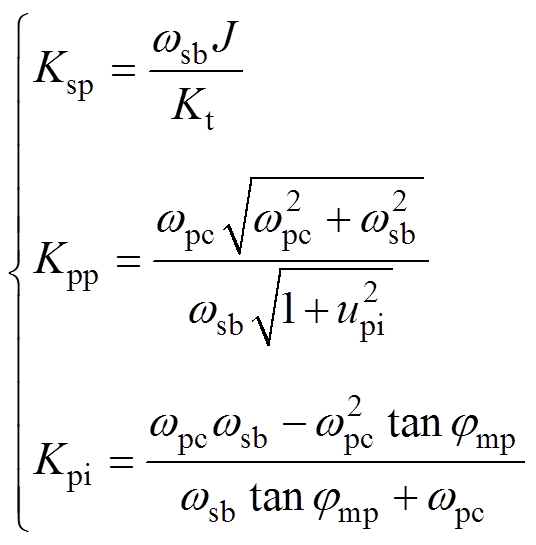
双环结构的开环Bode图如图5所示,其主要分为三个区间,其中参数w pc、Kpi、a 决定了系统的带宽、低频段指令跟踪性能、闭环系统稳定性,而wl和x 决定了高频段噪声抑制性能[12, 18-19]。为使系统具有wpc的位置开环期望截止频率以及jmp的相位裕度,控制器参数频域整定公式为
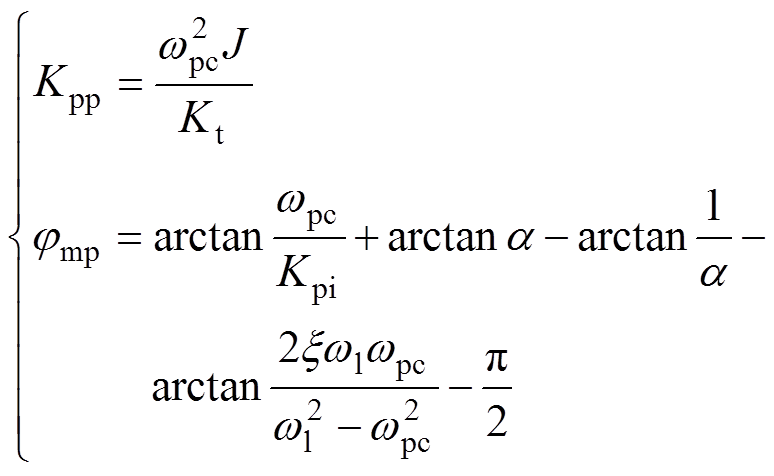 (20)
(20)
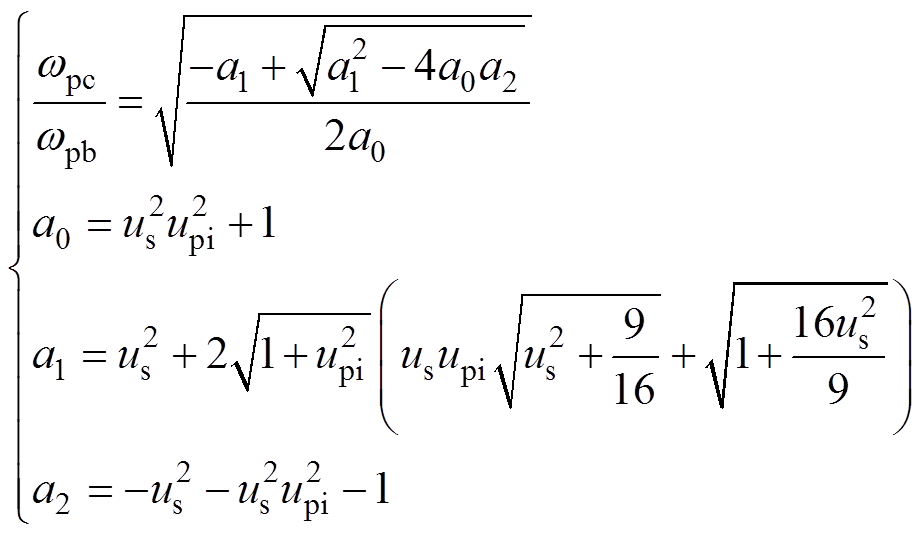
根据闭环带宽定义,位置开环截止频率与闭环带宽之间的表达式为
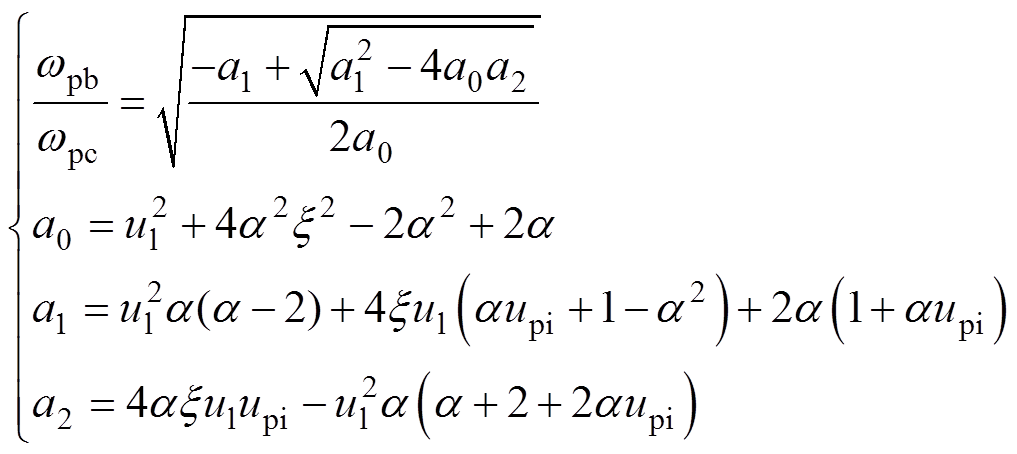 (21)
(21)
式(20)和式(21)建立了PI-Lead结构位置闭环频域指标与控制器参数之间的联系。基于上述结果,PI-Lead双环结构参数整定过程如图6所示。

图6 PI-Lead双环结构参数整定过程
Fig.6 PI-Lead structure parameter tuning process
工程中各参数可按表2所示经验值配置,此时参数整定过程得到进一步简化。
表2 双环结构参数设计范围
Tab.2 Design range of dual-loop structure parameters
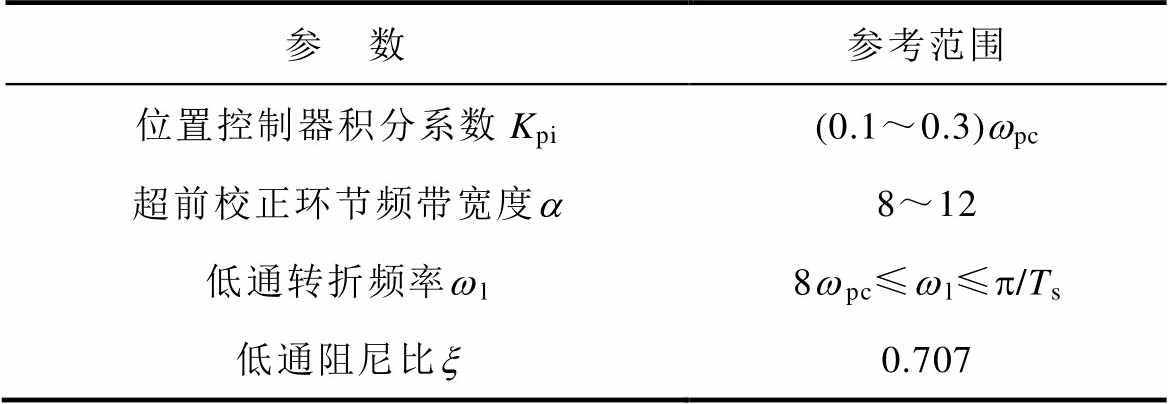
参 数参考范围 位置控制器积分系数Kpi(0.1~0.3)wpc 超前校正环节频带宽度a8~12 低通转折频率wl8wpc≤wl≤p/Ts 低通阻尼比x0.707
图7所示的三种结构控制框图表明,其差异体现在G1(s)、G2(s)和G3(s)区域,如式(22)所示,其主要区别之一在于位置开环传递函数所含积分环节的数量,PI-Lead结构最多,而P-PI-PI结构最少。
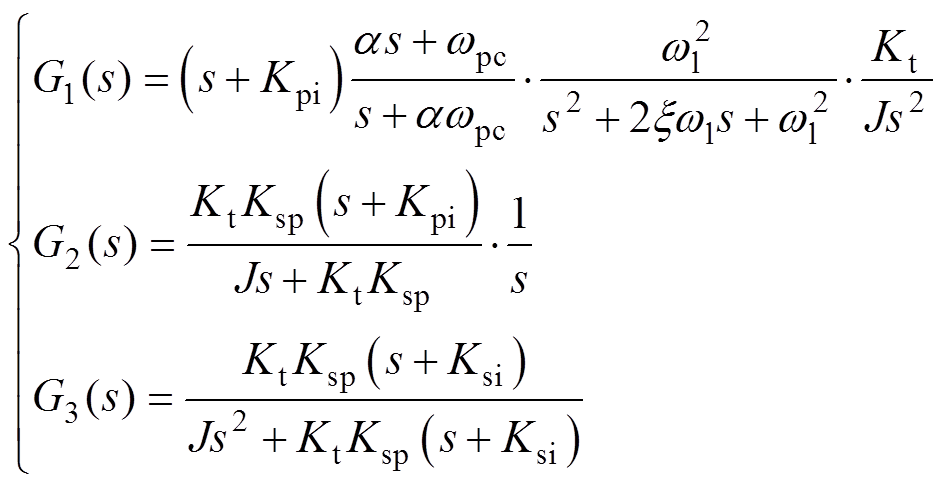 (22)
(22)
相同期望位置开环截止频率下,三者的位置开环Bode图如图8所示。
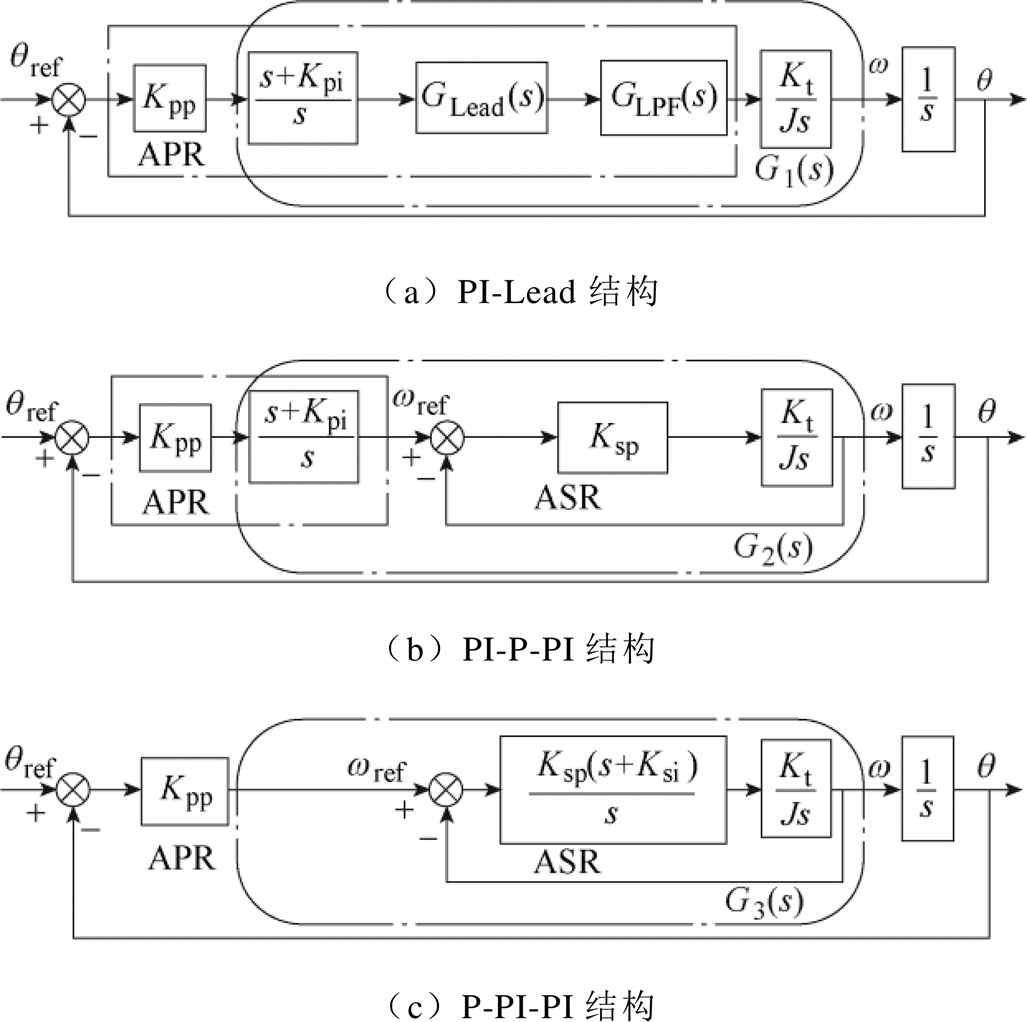
图7 PI-Lead与三环控制结构对比
Fig.7 Comparison of PI-Lead and three-loop structure
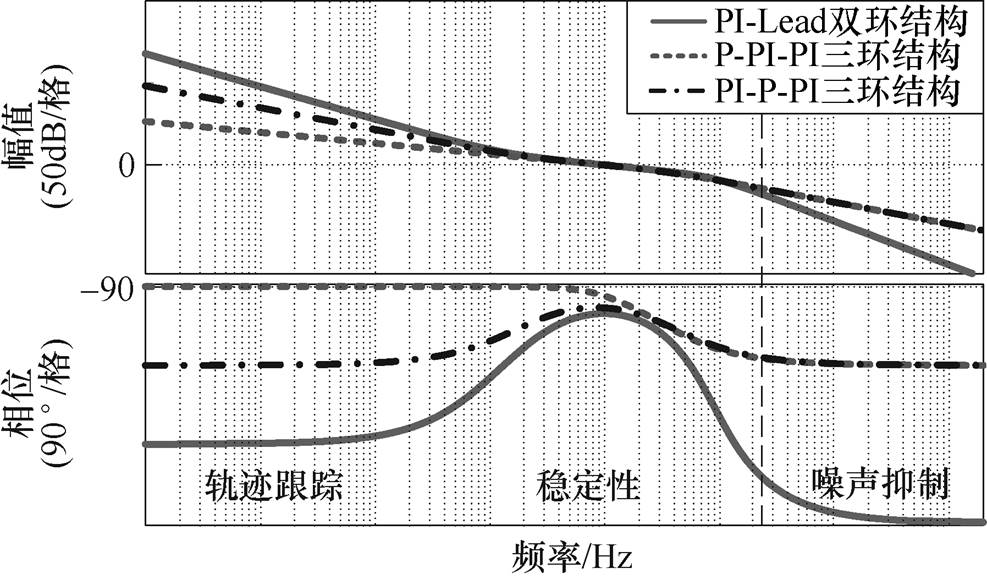
图8 PI-Lead与三环结构开环Bode图
Fig.8 Bode diagram of PI-Lead and three-loop
在低频段,系统的指令跟踪性能与幅值增益呈正相关,因此图8中PI-Lead结构稳态位置跟踪精度更高。为定量分析三种控制结构稳态位置跟踪精度的差异,由式(12)所示稳态误差计算公式及开环传递函数式(3)、式(6)及式(11),可得三种结构在定位指令下稳态误差均为0。匀速指令下P-PI- PI结构存在vref/Kpp的稳态误差,而其余两种结构均能够零稳态误差跟随,证明了P-PI-PI结构轨迹跟踪精度最低。恒加速度指令下,仅有PI-Lead结构能够零静差跟随,证明其具有最高的轨迹跟踪精度。
在高频段,图8中PI-Lead结构高频段的幅值更低,所以其高频噪声抑制能力更强。
为对比三种结构位置极限带宽能力,并为双环结构位置环期望带宽的设计提供理论依据,首先进一步完善系统的数学模型,将电流环闭环传递函数Gcc(s)等效为纯滞后环节,数字化离散的影响等效为零阶保持器Gh(s),其公式[20]为
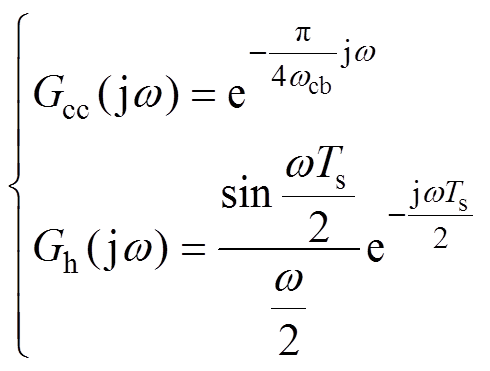 (23)
(23)
考虑相位延迟后三种结构相位裕度为
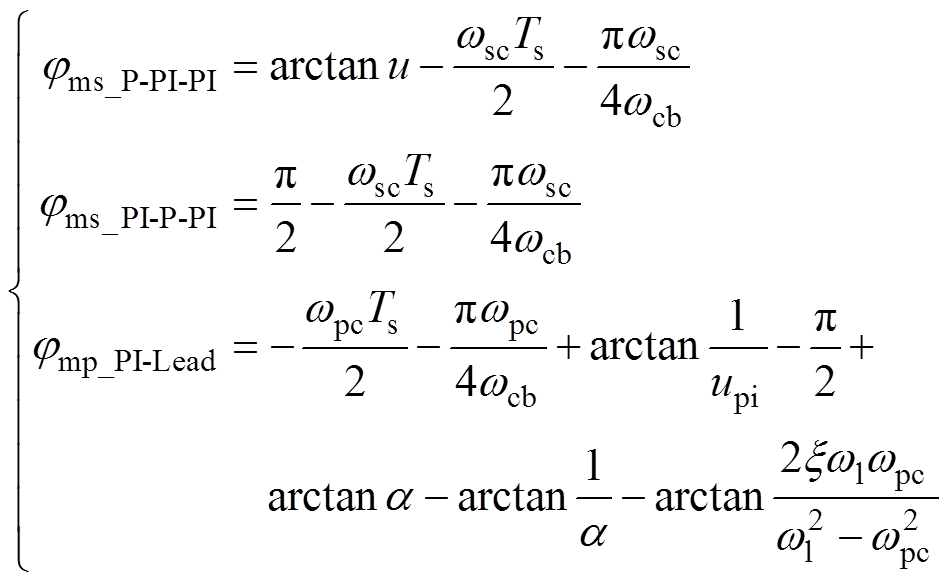 (24)
(24)
为保证稳定,以式(24)所示的相位裕度大于零作为极限带宽约束条件,同时为简化三环结构参数整定过程,令速度环与位置环期望带宽比值固定设置为5[17]。实际工业应用中,不可避免地存在由建模不完全引起的额外延时环节,为保证系统稳定,取实际位置环极限带宽为理论极限带宽的60 %,得到三种控制结构极限位置开环截止频率为
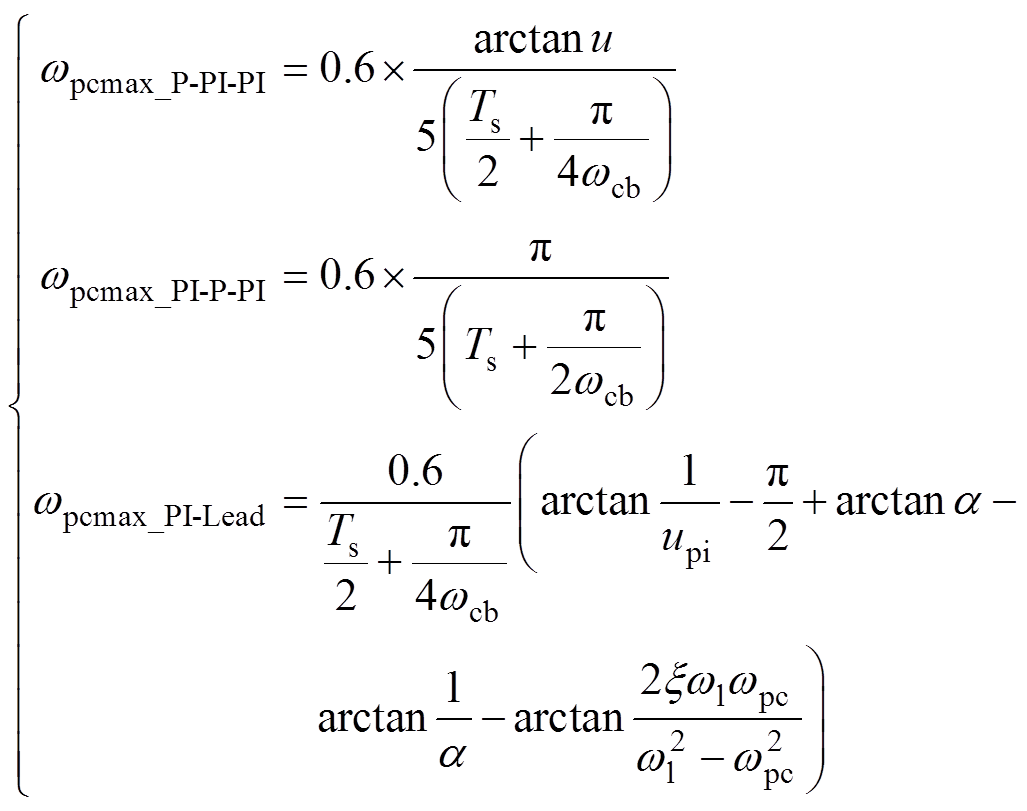 (25)
(25)
由式(25),令Ts=1/2 000 s,jms=80 °,a =10,ul=10,upi=0.2,绘制出在不同电流环闭环带宽下三种结构的位置环极限带宽如图9所示,结果表明,PI-Lead双环结构具有最高的位置环极限带宽,即具有更高的动态响应性能。同时,式(25)也为三种结构在实际工程应用中期望位置环带宽的配置提供参考范围,减少了试凑过程,进一步简化了参数整定的复杂度。
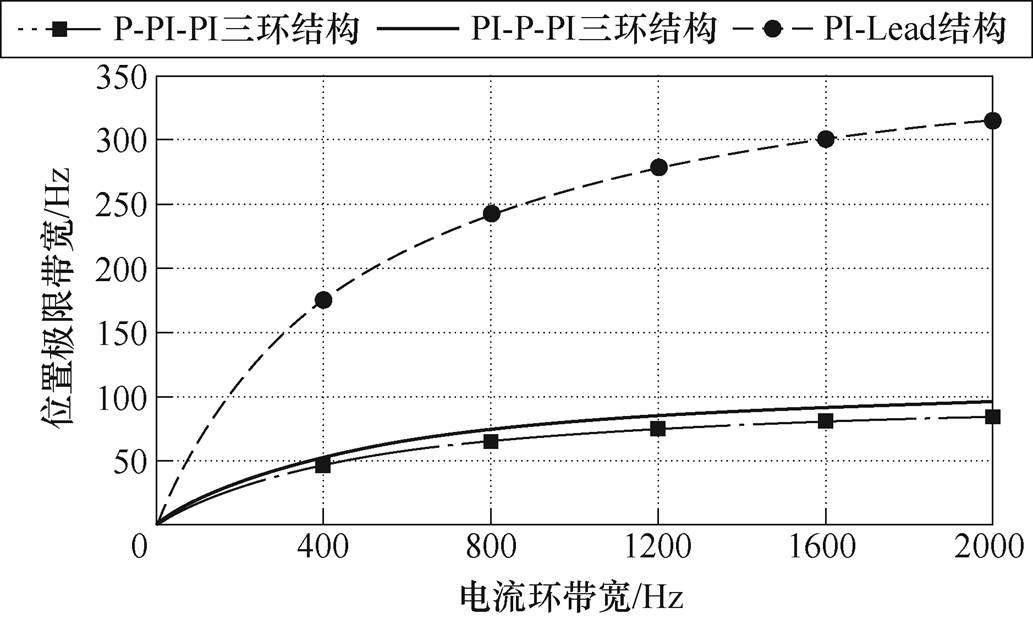
图9 不同电流环带宽下三种控制结构位置极限带宽
Fig.9 Position limit bandwidth of three structures under different current loop bandwidths
综上所述,P-PI-PI三环结构稳定性更高,但其轨迹跟踪精度较差,需引入速度前馈提高精度。PI-P-PI三环结构能够在恒转速位置指令下无稳态误差跟随,但恒加速度指令下仍存在稳态误差。PI-Lead双环结构具有更高的轨迹跟踪精度、高频噪声抑制能力以及位置环极限带宽,但其为Ⅲ型系统,稳定性相对较差,有待进一步研究。
实验平台如图10所示,控制芯片采用Xilinx公司的Zynq7020芯片,电流环由芯片中FPGA实现,速度、位置环由ARM实现,电机参数见表3。
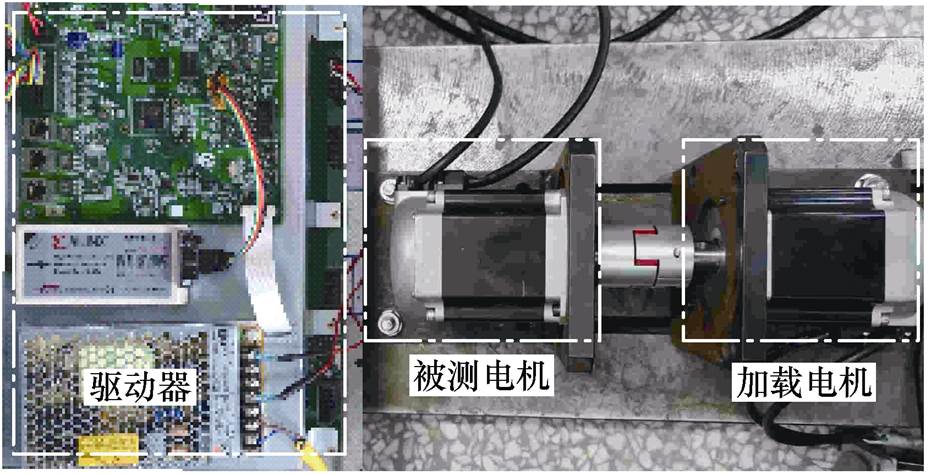
图10 实验平台
Fig.10 Experimental platform
为保证实验条件相同,双环结构与两种三环结构的位置闭环期望带宽和位置环相位裕度分别被设置为40 Hz和65 °,电流控制器参数完全相同。在频率40 Hz,幅值0.12 rad的正弦位置指令下,三种控制结构响应波形如图11所示。
实验结果表明,双环结构、PI-P-PI结构与P-PI- PI结构位置反馈分别衰减为指令的0.753、0.682和0.668,且三者相位滞后Dj 均小于90 °,虽然实际系统为数字化离散系统,且存在逆变器非线性因素影响,但三种控制结构幅值衰减均在0.707倍附近,验证了所提频域参数整定方法的有效性。
表3 电机参数
Tab.3 Motor parameters
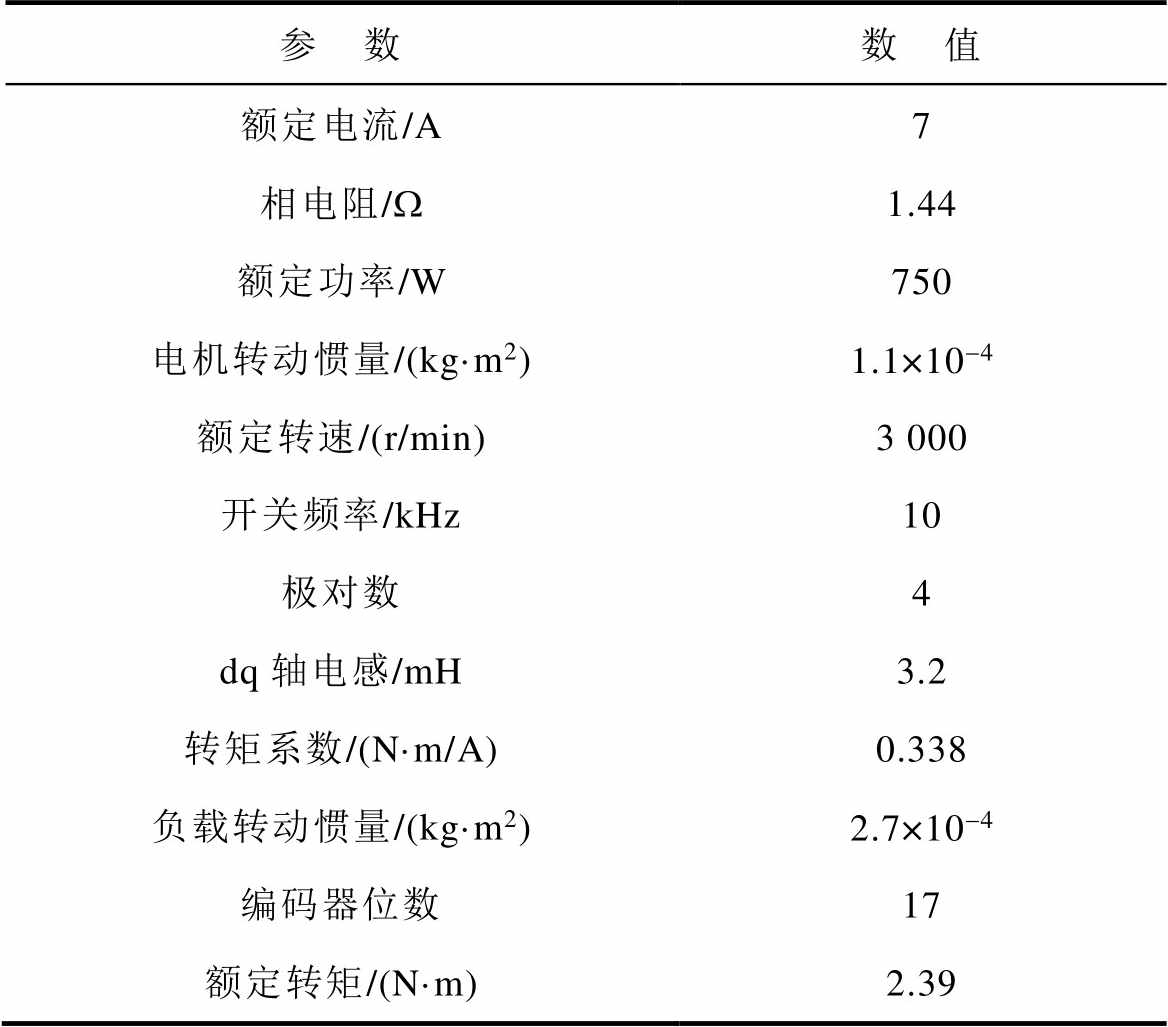
参 数数 值 额定电流/A7 相电阻/W1.44 额定功率/W750 电机转动惯量/(kg·m2)1.1×10-4 额定转速/(r/min)3 000 开关频率/kHz10 极对数4 dq轴电感/mH3.2 转矩系数/(N·m/A)0.338 负载转动惯量/(kg·m2)2.7×10-4 编码器位数17 额定转矩/(N·m)2.39
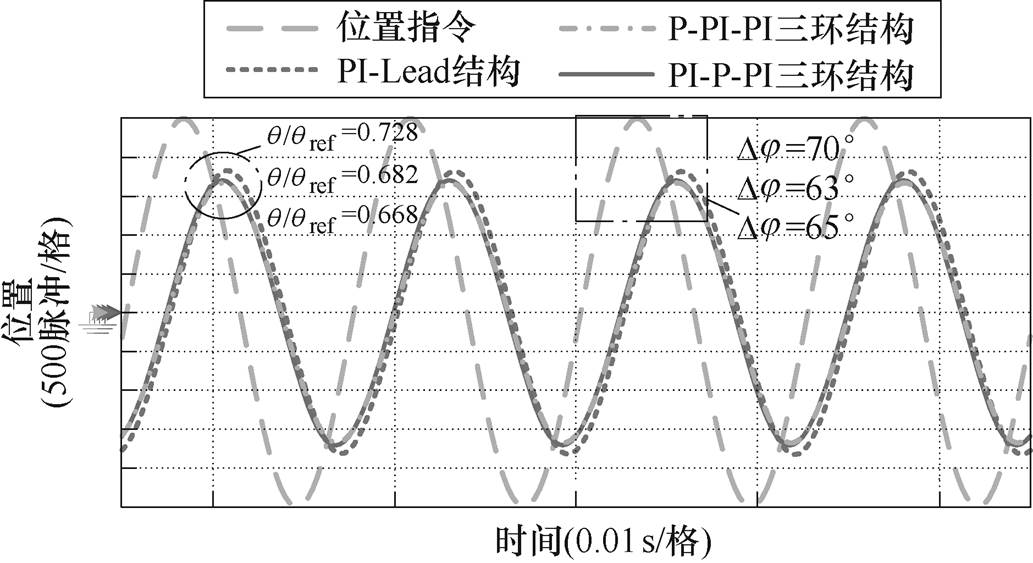
图11 三种控制结构频域参数整定方法验证(a =10, w l=8wpc, wsb=100 Hz)
Fig.11 Verification of gain scheduling methods based on frequency domain for three kinds of control structures(a =10, w l=8wpc, wsb=100 Hz)
为在最优性能下对比三种结构,本节进行极限带宽搜索实验。位置指令为周期1s的S曲线,最大加速度与速度分别为800 rad/s2与80 rad/s。双环结构带宽初始值为70 Hz,每周期递增30 Hz,直至系统失去稳定,PI-Lead结构实验结果如图12所示。
三环结构极限带宽搜索实验结果如图13所示,令速度环与位置环闭环带宽比值为5[21],初始位置带宽为15 Hz,每周期递增5 Hz,直至系统不稳定。
实验结果表明,当PI-Lead双环结构带宽提高到极限带宽fmax=250 Hz时,系统出现失稳问题。为保证系统稳定,参考Ziegler-Nichols法思想[6],取闭环带宽为0.6fmax,即150 Hz进行后续实验。三环极限带宽搜索结果表明,当P-PI-PI结构与PI-P-PI结构位置带宽分别提高到45 Hz和50 Hz时,系统出现不稳定问题,由于限幅环节的存在系统不会发散,而是使q轴电流产生正负饱和的振荡,同样选择0.6fmax(27 Hz与30 Hz)作为后续实验中设置的位置闭环带宽。三种控制结构极限带宽的差异表明,双环结构由于减少了速度环节,其具有更高的位置极限带宽。
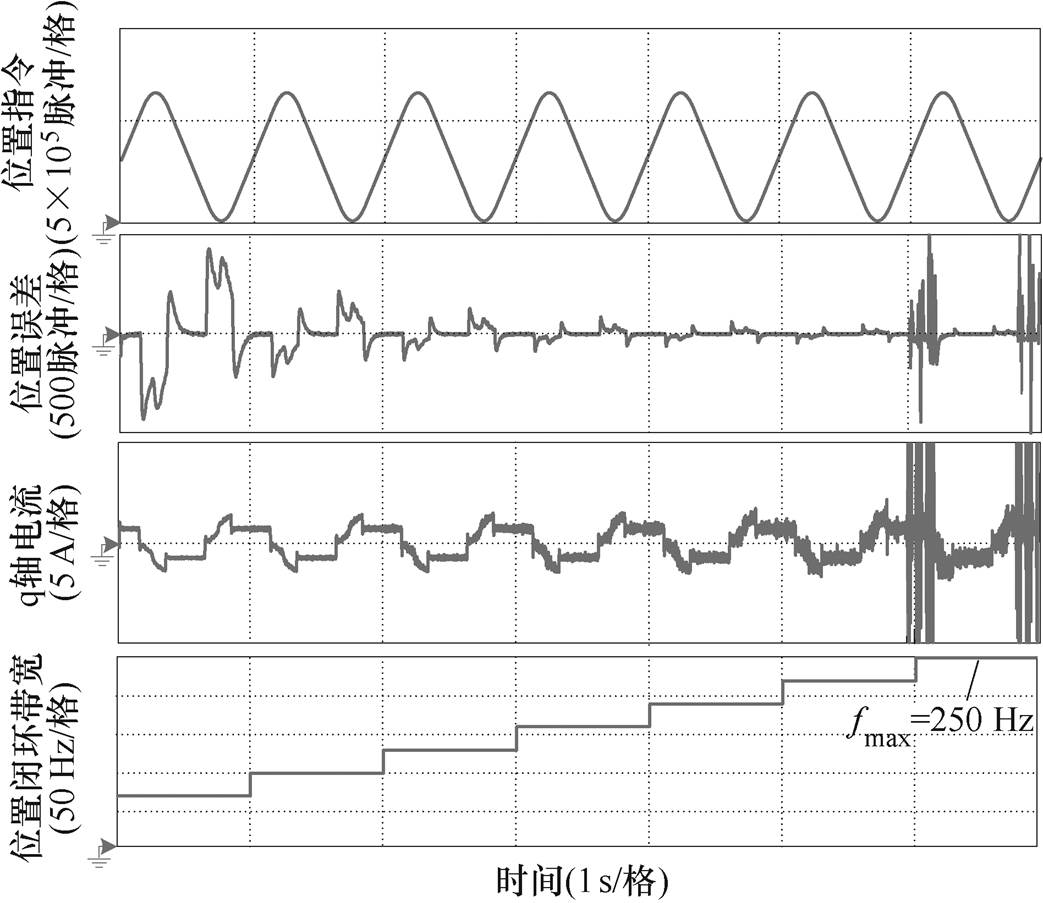
图12 PI-Lead结构极限带宽搜索过程
Fig.12 Limit bandwidth search of PI-Lead structure
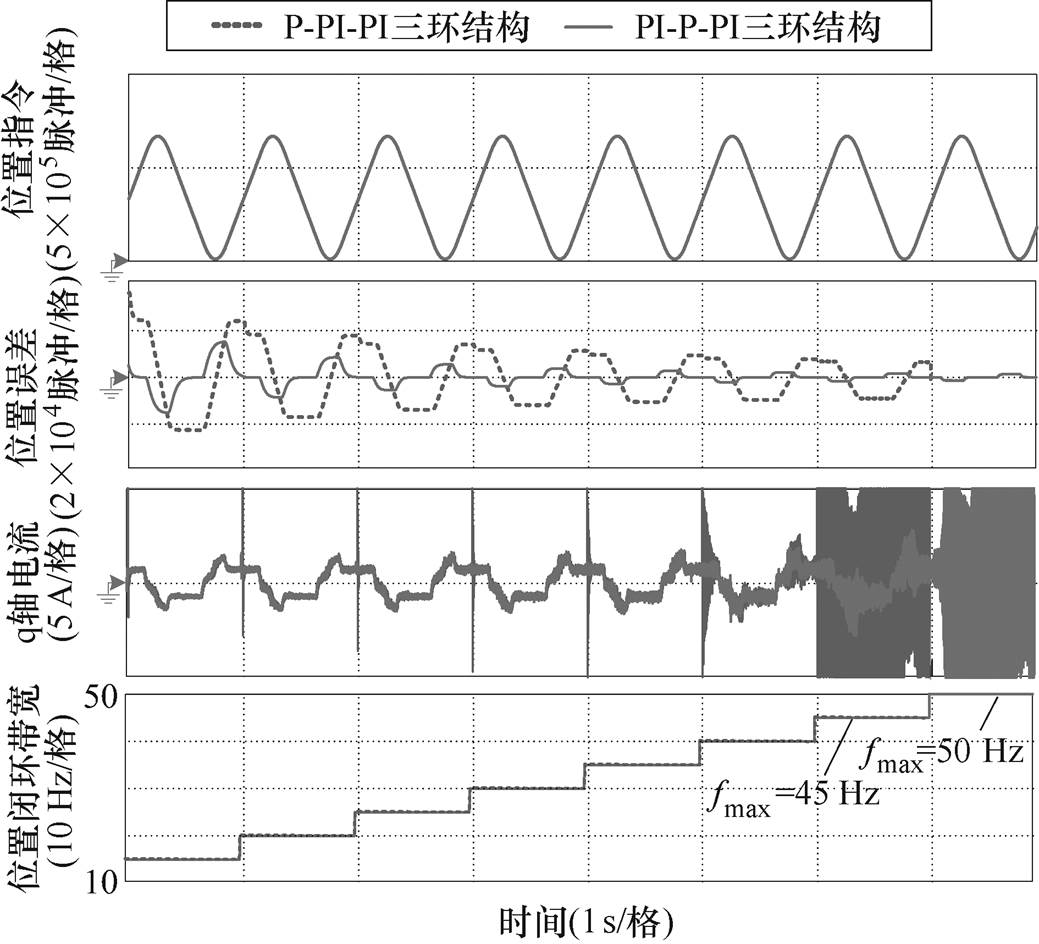
图13 三环结构极限带宽搜索过程
Fig.13 Limit bandwidth search of three-loop structure
三种控制结构在实验参数下的低频正弦指令跟踪能力对比实验如图14所示。位置指令被设定为频率0.5 Hz,幅值3 rad的正弦信号。实验结果表明,低频正弦指令下,双环结构的最大位置误差Dqmax仅为38个脉冲,而PI-P-PI与P-PI-PI的最大误差分别为178个脉冲以及1 520个脉冲。因此,对于低频正弦指令,PI-Lead结构具有很高的跟踪精度。
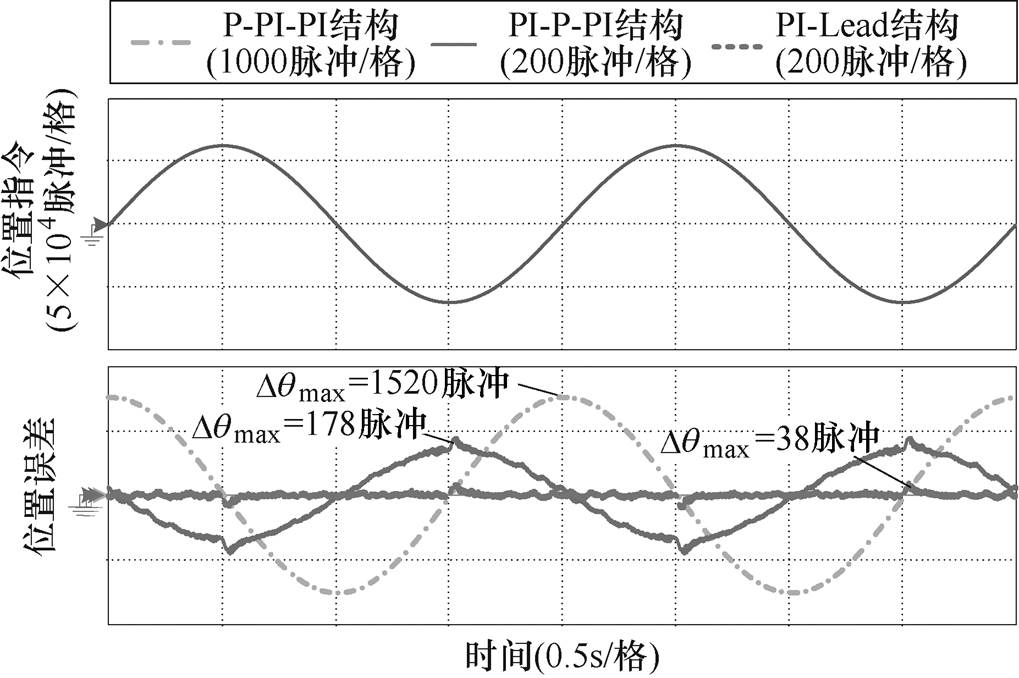
图14 三种控制结构低频正弦响应波形
Fig.14 Low-frequency sinusoidal response waveforms
三种控制结构位置斜坡响应波形如图15所示,其中位置指令采用工业常见的七段式S曲线,加加速度、加速度及速度分别设置为400 rad/s3、100 rad/s2及50 rad/s。为定量分析三种结构的位置误差,引入方均根值ERMSE及算术平均值 评价位置误差,有
评价位置误差,有
 (26)
(26)
式中,Dq(i)为位置误差的第i个数据;N为计算范围内数据的总数量。
实验结果表明,暂态段双环结构动态跟踪误差可控制在12个脉冲以内。匀速段PI-Lead结构与PI-P-PI结构位置误差算术平均值基本一致,仅为0.1个脉冲,双环位置误差方均根值与PI-P-PI仅相差一个脉冲,且两者均远小于P-PI-PI三环结构的8 065个脉冲,证明了其在匀速段具有很高的轨迹跟踪能力。定位段中,三种结构均能将位置误差控制在1个脉冲以内,三者具有基本相同的定位能力。
恒加速度响应实验结果如图16所示,其中位置指令为S曲线,加速度为200 rad/s2,速度为100 rad/s,往复周期为4 s。
结果表明,在恒加速段,P-PI-PI结构无法跟随位置指令;PI-P-PI结构存在959个脉冲的位置稳态误差;而双环结构恒加速度段位置误差最小,最大误差仅有40个脉冲,证明了其轨迹跟踪精度的优势。
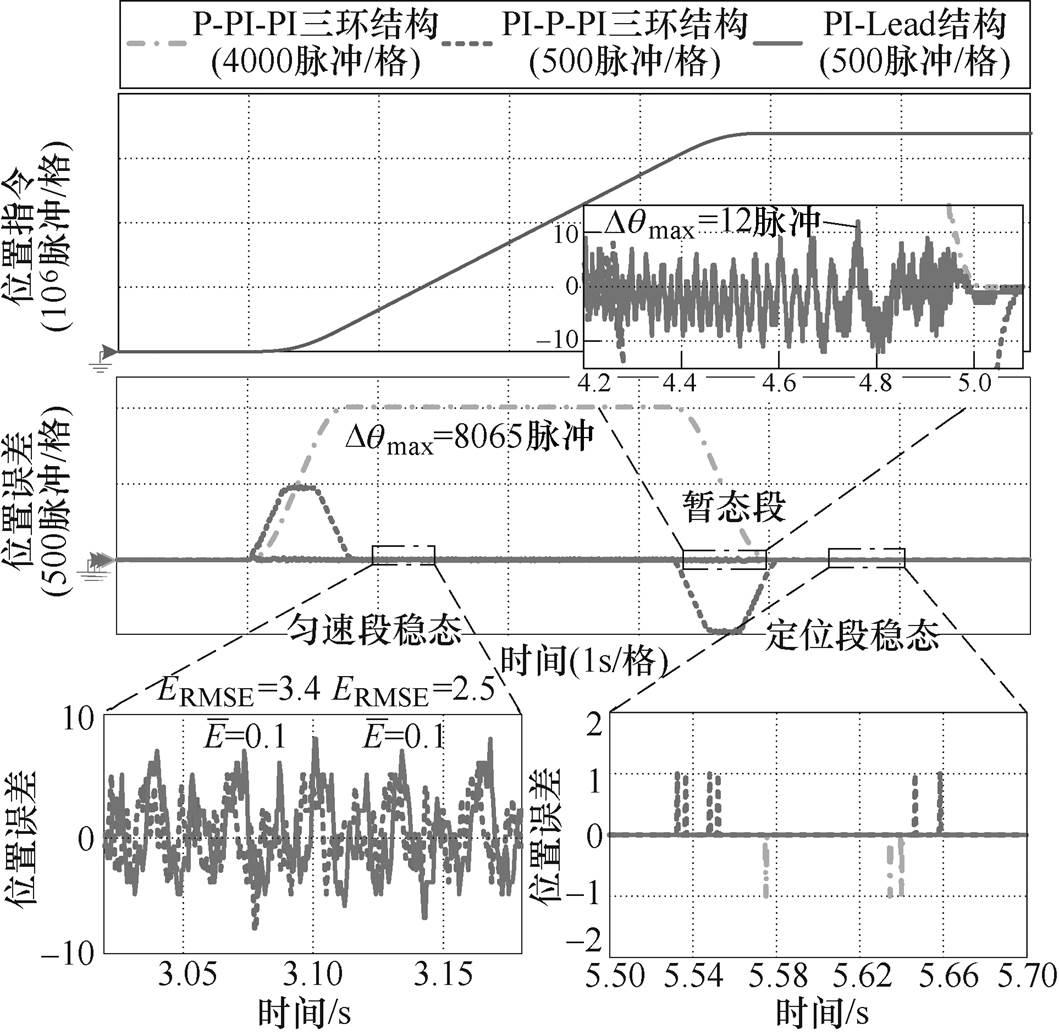
图15 三种控制结构斜坡定位响应波形
Fig.15 Slope and positioning response waveforms of three structures
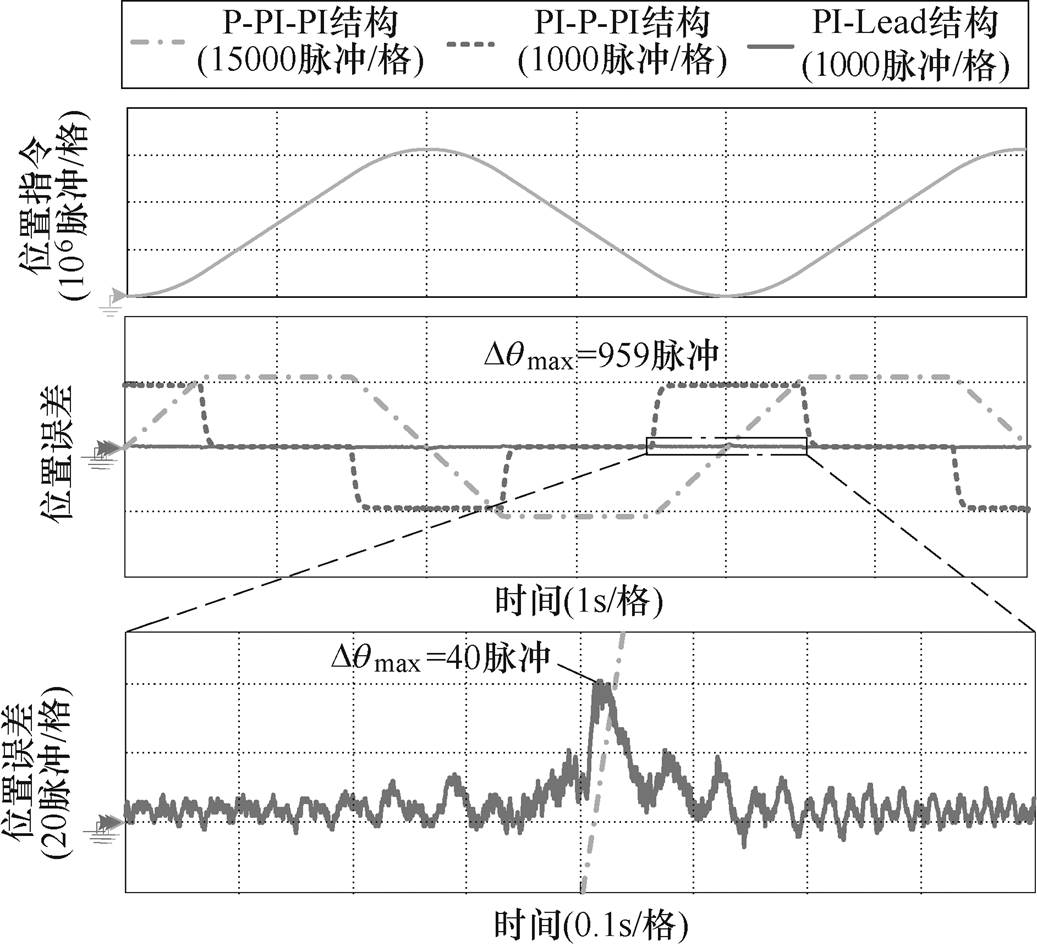
图16 三种控制结构S曲线下响应波形
Fig.16 Response waveforms of three structures under S curve
工业中常用的结合速度前馈的P-PI-PI三环结构与双环结构轨迹跟踪精度对比实验如图17所示,其中位置指令为S曲线,加速度、速度分别为500 rad/s2和200 rad/s,在2 s后定位停车,三环结构速度前馈系数分别为95 %、100 %及105 %。
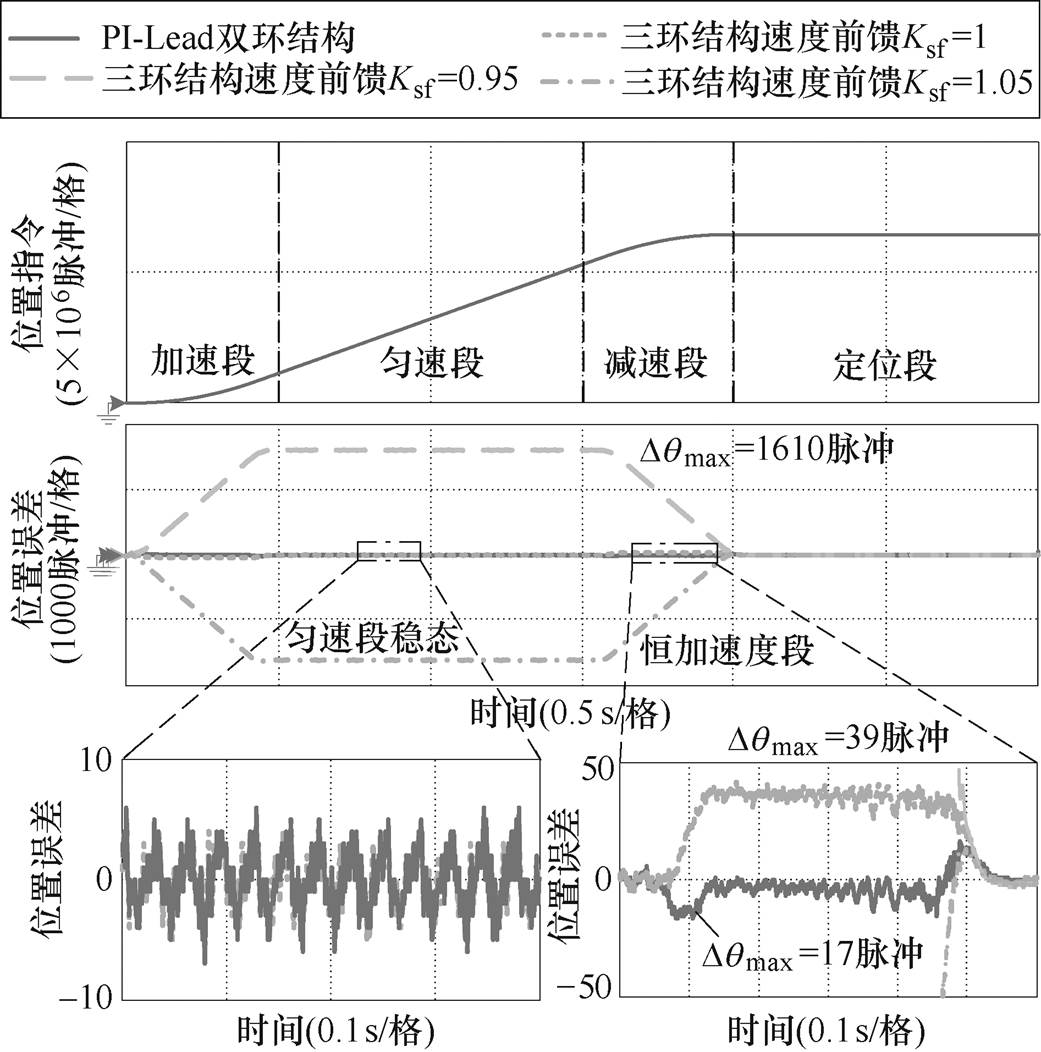
图17 三环结合速度前馈结构与双环结构跟踪精度实验
Fig.17 Three loop structure with speed feedforward and PI-Lead structure trajectory tracking accuracy experiment
结果表明,P-PI-PI结构加入100 %速度前馈后,其匀速段稳态误差基本消除,与双环结构基本一致,但加速段仍存在恒定的位置误差(39脉冲),而双环结构位置误差相对更小。双环结构在恒加速段起始暂态过程中,产生了较小的超调(17脉冲),证明了其相对稳定性较差,因此更适用于对超调要求不严格而对位置精度要求很高的领域,如车载激光雷达伺服系统。同时,位置稳态误差对三环结构前馈系数敏感,当前馈系数为95 %与105 %时,系统分别出现欠补偿和过补偿问题,分别产生了1 610与-1 600脉冲的匀速段稳态误差,导致三环结构速度前馈系数整定相对困难。
三种结构抗扰性能对比实验如图18所示。位置指令暂态段为S曲线,第0.5 s进入定位状态。第1 s、1.5 s处分别突加突卸2.39 N·m额定负载。结果表明,在定位状态突加额定负载,双环、PI-P-PI、P-PI-PI结构的最大位置误差分别为739、698、484脉冲,P-PI-PI结构抗扰能力相对较强,双环结构与PI-P-PI结构抗扰能力基本一致。
双环结构低通滤波器转折频率分别为30倍、8倍位置开环截止频率及无低通滤波器下,位置、速度、q轴电流反馈时域与傅里叶分析结果如图19所示。其中位置指令为S曲线,匀速段速度为100 rad/s,加减速段加速度为200 rad/s2。
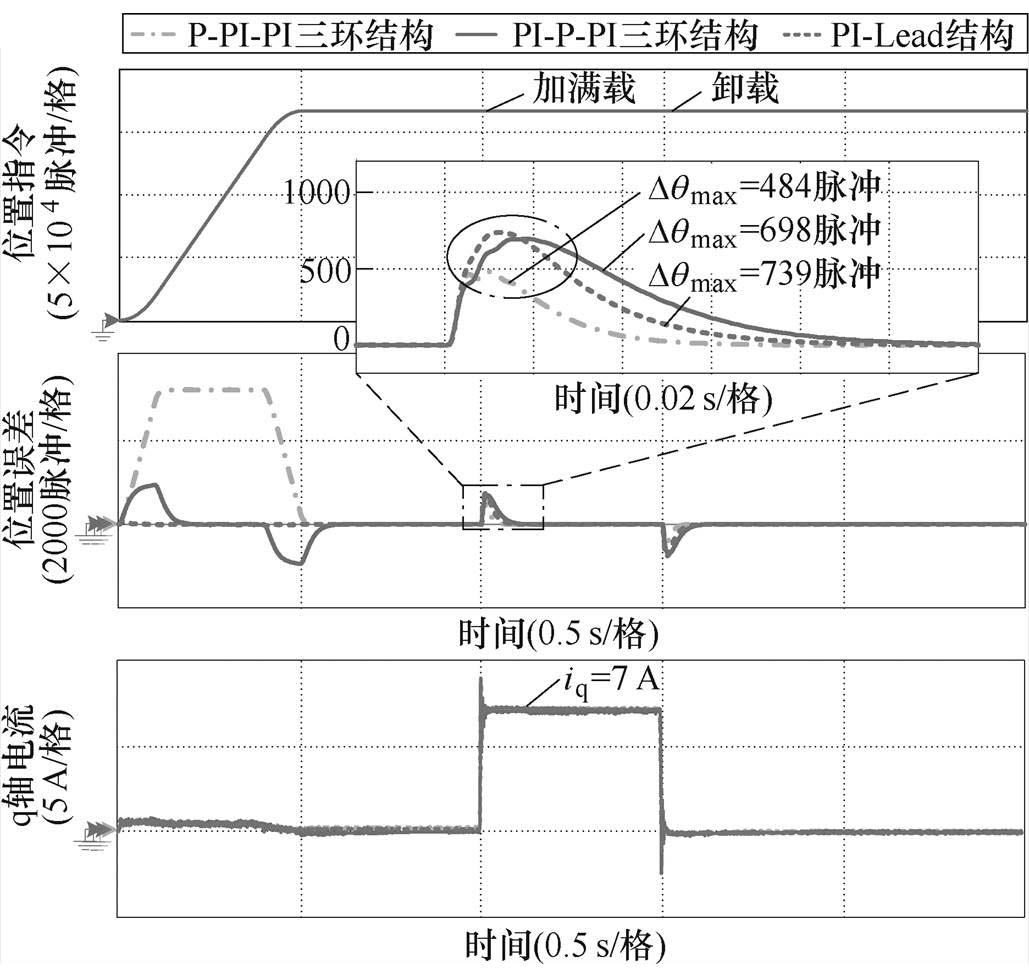
图18 三种控制结构加载实验波形
Fig.18 Experimental waveforms of three structures under loading
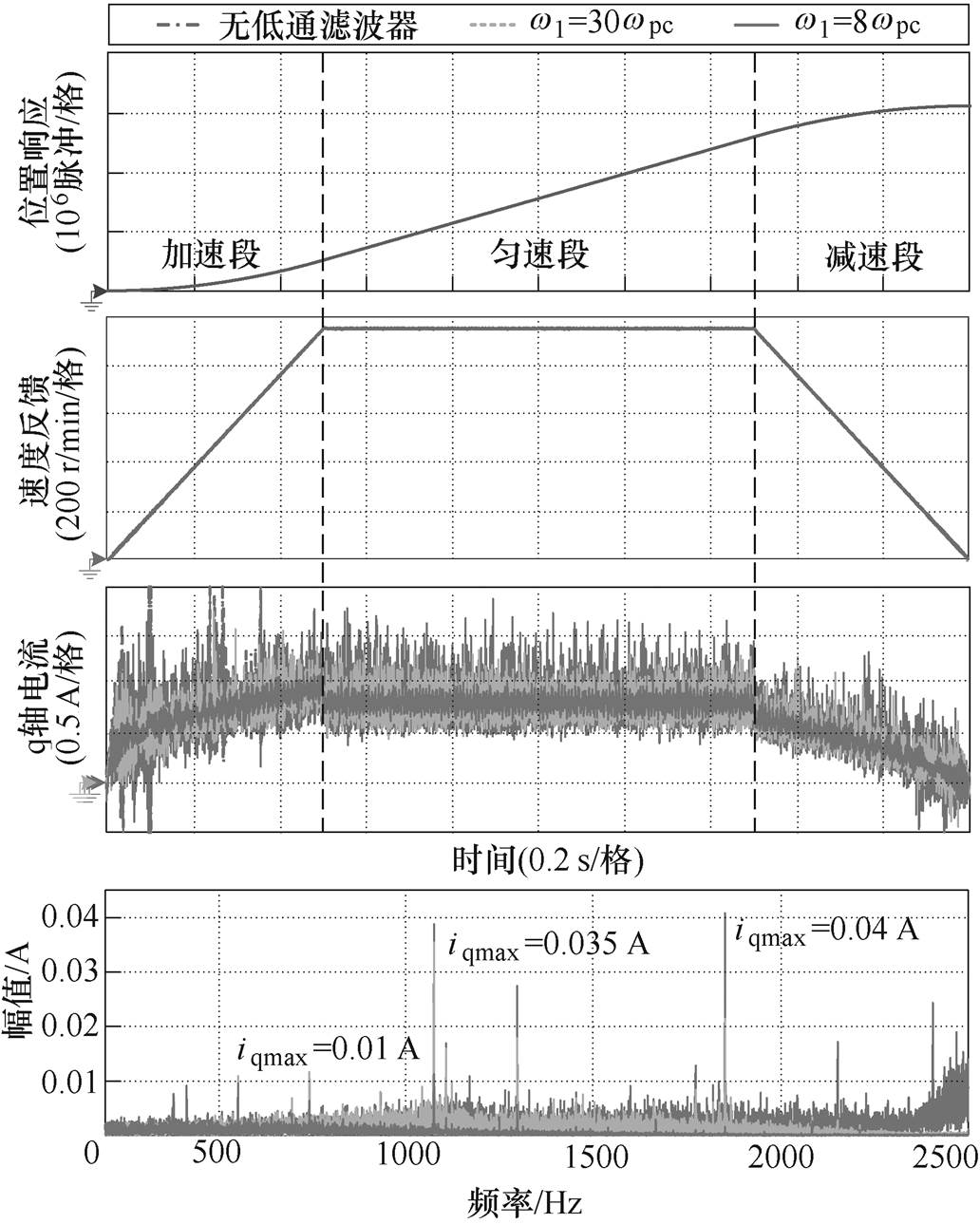
图19 双环结构不同低通截止频率噪声抑制波形
Fig.19 Noise suppression waveforms of dual loop with different low-pass cutoff frequencies
结果表明,引入低通滤波器后,q轴电流时域的包络线明显变细,降低了高频噪声,且随着低通滤波器截止频率降低,高频噪声抑制能力增强。图19中q轴电流傅里叶分析结果表明,双环结构无低通滤波器时高频噪声最大为0.04 A,低通滤波器截止频率分别为30倍及8倍位置开环截止频率,能够将噪声降低到0.035 A和0.01 A,证明了低通滤波器能够显著提高系统的高频噪声抑制能力。
图20给出PI-Lead结构与两种三环结构均按4.2节实验带宽参数下的高频噪声抑制对比实验,其中双环结构低通滤波器截止频率设置为8wpc。实验结果表明,P-PI-PI三环结构与PI-P-PI三环结构均存在0.02 A左右的高频振动峰值,而PI-Lead双环结构振动峰值更低,为0.01 A。在大于1 000 Hz的高频范围,双环结构噪声含量更低,证明了双环结构相比于三环结构具有更强的高频噪声抑制能力。
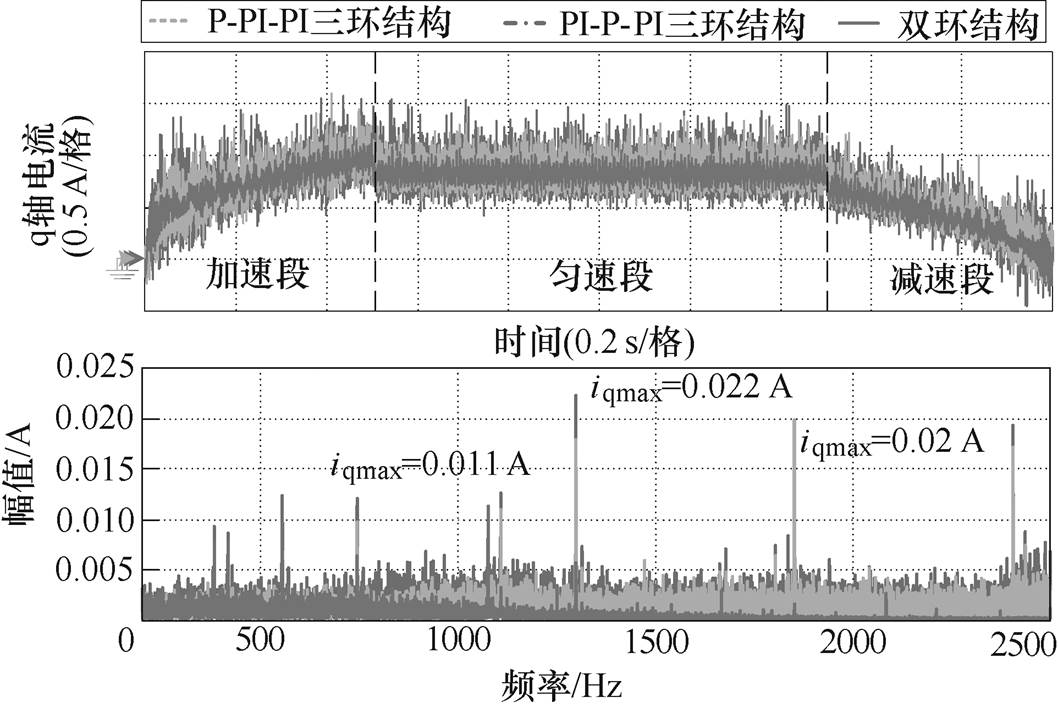
图20 双环结构与三环结构高频噪声抑制能力对比实验
Fig.20 Comparison experiment of high frequency noise suppression of PI-Lead structure and three loop structure
为提高位置伺服系统的动态轨迹跟踪精度,本文研究了一种PI-Lead双环结构,证明了其中相位超前环节对维持系统稳定的重要意义。为均衡高频噪声抑制能力与对系统稳定性的影响,给出了低通滤波器截止频率的参数设计方法,并进一步推导了PI-Lead结构基于闭环频域指标的参数整定策略。通过详细的理论对比分析与实验,证明了PI-Lead双环结构相比于三环结构具有如下特点:首先,由于PI-Lead结构减去了速度环,简化了控制器参数整定过程,便于调试,避免了速度测量噪声等问题;同时PI-Lead结构具有更高的位置极限带宽与轨迹跟踪精度,其在无需任何前馈的情况下,能够消除三环结构存在的动态跟踪误差,解决了前馈系数整定复杂的问题;但由于双环结构是Ⅲ型系统,其稳定性有待进一步提升。
参考文献
[1] 赵文祥, 刘桓, 陶涛, 等. 基于虚拟信号和高频脉振信号注入的无位置传感器内置式永磁同步电机MTPA控制[J]. 电工技术学报, 2021, 36(24): 5092- 5100.
Zhao Wengxiang, Liu Huan, Tao Tao, et al. MTPA control of sensorless IPMSM based on virtual signal and high-frequency pulsating signal injection[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5092-5100.
[2] 李家祥, 汪凤翔, 柯栋梁, 等. 基于粒子群算法的永磁同步电机模型预测控制权重系数设计[J]. 电工技术学报, 2021, 36(1): 50-59, 76.
Li Jiaxiang, Wang Fengxiang, Ke Dongliang, et al. Weighting factors design of model predictive control for permanent magnet synchronous machine using particle swarm optimization[J]. Transactions of China Electrotechnical Society, 2021, 36(1): 50-59, 76.
[3] 王璨, 李国冲, 杨桂林, 等. 基于生物智能环状耦合的嵌入式永磁同步直线电机高精度位置协同控制研究[J]. 电工技术学报, 2021, 36(5): 935-943.
Wang Can, Li Guochong, Yang Guilin, et al. Research on position cooperative control of high-precision embedded permanent magnet synchronous linear motor based on biological intelligence loop coupling[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 935-943.
[4] 王立俊, 赵吉文, 董菲, 等. 基于自适应内模观测器的永磁同步直线电机高带宽强鲁棒预测电流控制策略研究[J]. 中国电机工程学报, 2019, 39(10): 3098-3107.
Wang Lijun, Zhao Jiwen, Dong Fei, et al. High- bandwidth and strong robust predictive current control strategy research for permanent-magnet synchronous linear motor based on adaptive internal model observer[J]. Proceedings of the CSEE, 2019, 39(10): 3098-3107.
[5] 嵇启春, 孙育刚. 位置伺服系统控制算法的研究[J]. 电气传动, 2010, 40(5): 60-62.
Ji Qichun, Sun Yugang. Research of position servo system control algorithm[J]. Electric Drive, 2010, 40(5): 60-62.
[6] 李长红, 陈明俊, 韩耀鹏. 基于最大相位裕度的位置伺服系统设计[J]. 电工技术学报, 2015, 30(20): 10-20.
Li Changhong, Chen Mingjun, Han Yaopeng. Design of position servo system based on maximum phase margin[J]. Transactions of China Electrotechnical Society, 2015, 30(20): 10-20.
[7] Liu Jing, Li Hongwen, Deng Yongting. Torque ripple minimization of PMSM based on robust ILC via adaptive sliding mode control[J]. IEEE Transactions on Power Electronics, 2018, 33(4): 3655-3671.
[8] Bejarano-Rincon A, Hernandez-Guzman V M. PD trajectory tracking control without velocity for rigid robots with PMSM[C]//2016 12th Congreso Inter- nacional de Ingeniería, Santiago de Queretaro, Mexico, 2016: 1-6.
[9] 滕福林, 胡育文, 刘洋, 等. 位置/电流两环结构位置伺服系统的跟随性能[J]. 电工技术学报, 2009, 24(10): 40-46.
Teng Fulin, Hu Yuwen, Liu Yang, et al. Tracking performance of position servo system only with position and current loops[J]. Transactions of China Electrotechnical Society, 2009, 24(10): 40-46.
[10] Yin Zhonggang, Gong Lei, Du Chao, et al. Integrated position and speed loops under sliding-mode control optimized by differential evolution algorithm for PMSM drives[J]. IEEE Transactions on Power Elec- tronics, 2019, 34(9): 8994-9005.
[11] 刘春强, 骆光照, 涂文聪, 等. 基于自抗扰控制的双环伺服系统[J]. 中国电机工程学报, 2017, 37(23): 7032-7039, 7095.
Liu Chunqiang, Luo Guangzhao, Tu Wencong, et al. Servo systems with double closed-loops based on active disturbance rejection controllers[J]. Pro- ceedings of the CSEE, 2017, 37(23): 7032-7039, 7095.
[12] Chen Yangyang, Yang Ming, Liu Kaiyuan, et al. Reversed structure based PI-Lead controller anti- windup design and self-commissioning strategy for servo drive systems[J]. IEEE Transactions on Indu- strial Electronics, 2022, 69(7): 6586-6599.
[13] Fu Xuewei, Yang Xiaofeng, Zanchetta P, et al. Frequency-domain data-driven adaptive iterative lear- ning control approach: with application to wafer stage[J]. IEEE Transactions on Industrial Electronics, 2021, 68(10): 9309-9318.
[14] Li Ying, Guo Guoxiao, Wang Youyi. Reset control for midfrequency narrowband disturbance rejection with an application in hard disk drives[J]. IEEE Transactions on Control Systems Technology, 2011, 19(6): 1339-1348.
[15] Datta U, Kalam A, Shi Juan. Battery energy storage system to stabilize transient voltage and frequency and enhance power export capability[J]. IEEE Transa- ctions on Power Systems, 2019, 34(3): 1845-1857.
[16] Maurya C P, Hote Y V, Siddhartha V. Design of PI- Lead controller for a plant having a right-half-plane zero[C]//2017 International Conference on Circuits, Controls, and Communications, Bangalore, India, 2018: 1-6.
[17] Garg M M, Vijay Hote Y, Pathak M K. Design and performance analysis of a PWM DC-DC Buck con- verter using PI-Lead compensator[J]. Arabian Journal for Science and Engineering, 2015, 40(12): 3607- 3626.
[18] 杨瑞. 精密永磁直线同步电机系统扰动抑制方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2020.
[19] Ahmadi D A, Saikumar N, Hosseinnia H. Tuning guidelines for fractional order PID controllers: rules of thumb[J]. Mechatronics, 2018, 56: 26-36.
[20] Chen Yangyang, Yang Ming, Long Jiang, et al. Analysis of oscillation frequency deviation in elastic coupling digital drive system and robust Notch filter strategy[J]. IEEE Transactions on Industrial Elec- tronics, 2019, 66(1): 90-101.
[21] Hsu C J, Lai Y S. Novel online optimal bandwidth search and autotuning techniques for servo motor drives[J]. IEEE Transactions on Industry Applications, 2017, 53(4): 3635-3642.
Abstract AC position servo system has been widely used in the industrial field, and how to improve the tracking accuracy and dynamic response performance of the position servo system has become one of the focuses and difficulties of the research. Although the position-speed-current three-loop nested structure is commonly used in position servo systems, for some occasions with strict position tracking accuracy requirements, on the one hand, the speed loop will introduce a large inertia delay link to the system, which will affect the dynamic response performance; on the other hand, the speed quantization error introduced by the encoder accuracy and speed measurement method will also directly affect the tracking accuracy of the system. In order to improve the position tracking accuracy and dynamic response performance of the servo system, this paper studies a position-current dual-loop servo control structure with speed loop free and analyzes characteristics of the dual-loop servo control structure and the traditional position-speed-current three-loop structure, thus providing a theoretical basis for the selection and choice of different position servo control structures in practical applications.
Firstly, the paper discusses the limitations of two traditional three-loop structures in tracking accuracy, gives the mechanism of speed feedforward to equivalently improve the system type number and the position tracking accuracy by configuring appropriate feedforward coefficients, and points out that the tracking accuracy is sensitive to the feedforward coefficients. Then the significance of the phase-leading link is proved that it can maintain the stability of the dual-loop structure. Besides, the influence of the second-order low-pass filter in each frequency band of the studied dual-loop control structure is analyzed in detail. The cut-off frequency design range of the low-pass filter is obtained under the trade-off between high-frequency noise suppression capability and stability requirements. Finally, the parameter tuning strategy of dual-loop control structure based on closed-loop frequency domain index is given.
In order to provide a theoretical basis and guideline for the selection and choice of the speed loop’s existence in practical application, this paper analyzes the characteristics of the dual-loop structure with speed loop free and the traditional position-speed-current three-loop structure in low-frequency band, middle-frequency band, and high-frequency band. Then, the position limit bandwidth of the three structures is derived, and the relationship between the current loop bandwidth and the position loop limit bandwidth is given. Finally, the experimental verification is carried out on a 750 W commercial permanent magnet synchronous motor and its matched motor driver. The experimental results show that the dual-loop structure with speed loop free can eliminate the dynamic tracking error of the system without any feedforward compensation under multiple position trajectories. It has higher limit bandwidth of the position loop and a stronger ability to suppress high-frequency noise than three-loop structures. In addition, because the speed control loop is reduced, the speed measurement link is unnecessary, and the parameter adjusting procedure is simpler.
keywords:Permanent magnet synchronous motor, position servo with speed loop free, dynamic tracking error, parameter tuning strategy
DOI: 10.19595/j.cnki.1000-6753.tces.220166
中图分类号:TM351
国家自然科学基金资助项目(51991385)。
收稿日期 2022-01-29
改稿日期 2022-03-14
杨 明 男,1978年生,教授,博士生导师,研究方向为电力电子技术及应用、交流永磁伺服系统和智能控制应用。E-mail: yangming@hit.edu.cn(通信作者)
刘铠源 男,1998年生,硕士研究生,研究方向为交流永磁伺服系统。E-mail: liukaiyuan_hit@163.com
(编辑 崔文静)