图1 有限转角力矩电机工作原理说明
Fig.1 Illustration of the working principle of LATM
摘要 有限转角力矩电机(LATM)具有结构简单、控制方便、可靠性高、力矩密度大等优点,因而其作为一种在有限转角内直驱工作的电动作动器已广泛应用于国民经济的诸多领域。该文首先介绍了LATM的理论基础,包括LATM的工作原理、矩角特性、主要拓扑结构及其演变思路,并补充了一些特殊的拓扑结构。其次,归纳了LATM的设计方法,并分析了如何抑制LATM工作区间内的力矩波动、提升区间内的输出力矩以及拓宽工作区间。然后,讨论了LATM在是否考虑非线性时的数学模型与控制方法。最后,对LATM的应用领域进行了归纳和介绍,总结展望了LATM及其相关技术研究的主要发展方向。
关键词:有限转角力矩电机 拓扑 设计方法 矩角特性 数学模型 控制方法
有限转角力矩电机(Limited Angle Torque Motor, LATM)是一种无需另加其他机械装置便能在一定的角度内绕轴线转动或者往复摆动的电机[1-2]。其常作为电动作动器,应用于有限转角内力矩要求小于1 kN·m的电动直驱工作[3-7],相比于传统的液动和气动作动器,无需管道等设备,且可线控驱动;相比于基于电机带减速齿轮箱的电动作动器,没有机械上的非线性问题,从而可用于精确定位[8-9]。由于LATM具有结构简单、控制方便、可靠性高、力矩密度大等优点[10-11],基于各种工作原理的LATM得到了快速发展,并广泛应用于阀门[12–17]、磁盘存储器[18-19]、卫星遥感[20-21]、天线定位[22]、舵机[23]、高压断路器[24]、医疗机械[25]、阻力伞锁[26]、高速扫描振镜[27]等领域。
目前,国内外对于LATM的研究主要集中于工业界,针对LATM的归纳很少[17, 28]。此外,应用领域对于LATM的特性需求具有特殊性,使得有关设计、优化等各方面的考虑与以往针对传统旋转电机的有较大出入。为此,本文回顾总结了国内外学者在LATM方面的研究工作,首先,简述了LATM的工作原理和矩角特性,介绍了主要的拓扑结构及其演变思路,并补充归纳了一些特殊的拓扑结构;其次,根据LATM设计考虑上的特殊性,归纳总结了设计方法和矩角特性优化的研究现状;然后,针对LATM的控制问题从数学模型和控制方法两个角度进行综述;最后,介绍了LATM的主要应用领域,并探讨了LATM未来发展的方向。
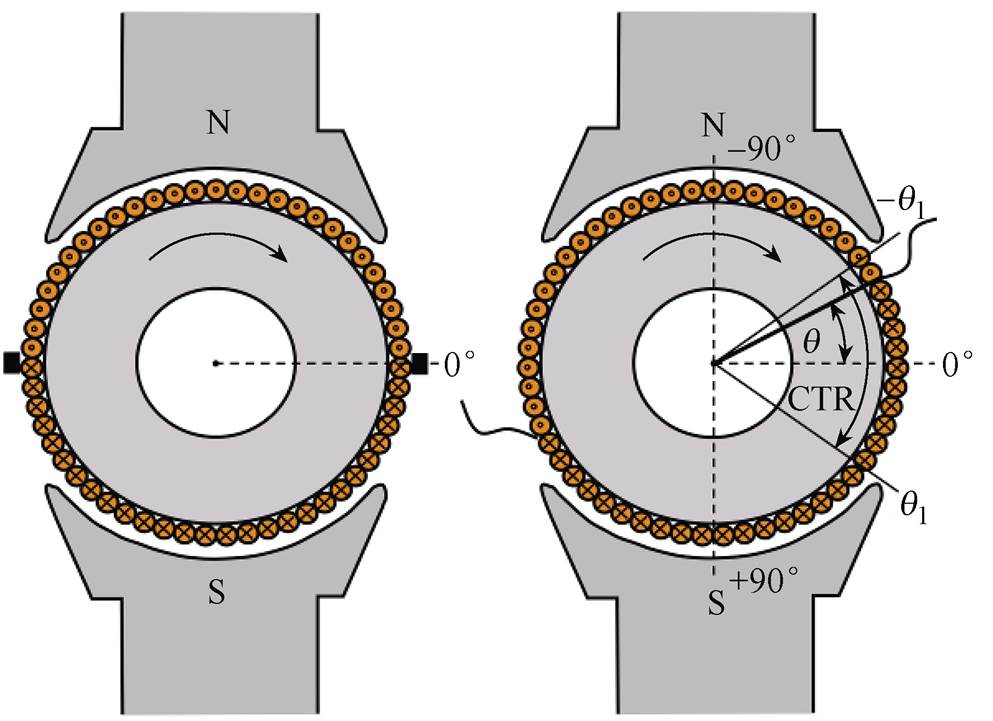
由于LATM的工作原理可以参考传统的直流有刷电机,从而也被称为有限转角无刷直流力矩电 机[1]。直流有刷电机的示意图如图1所示,图1中, q 为转子转角位置。在直流电机中,励磁磁场尽可能设计为等气隙磁通密度,以感应梯形反电动势波,在换向器的作用下每一主极下的电枢电流方向一致,使得电机可向某一方向连续旋转,多个线圈串联从而输出几乎恒定的力矩。如果电刷随电枢一同旋转,使得各线圈成为连接关系固定的单相绕组并采用柔软导线引出,则通以某一方向电流后,转子向某一方向可转动的角度范围不超过180 °,也即实现了有限转角运动。变换电流的方向就能改变输出力矩的方向,实现转子向不同转向的偏转。
图1 有限转角力矩电机工作原理说明
Fig.1 Illustration of the working principle of LATM
输出力矩与转子转角的关系即LATM最重要的特性——矩角特性。如图1所示,假定在可转动范围内,绕组输入某一方向的正向电流时,转子上输出力矩为正的转向为正转角方向。则绕组输入恒定正向的直流电流、转子从负最大转角-q1正向旋转到正最大转角q1的矩角特性如图2所示,图中,p为极对数,T为输出力矩,TN为额定输出力矩。该特性中的恒力矩区间(Constant Torque Range, CTR)也即LATM的工作区间,CTR内要求输出力矩的大小与输入电流成正比,与转速以及转子位置无关。CTR的大小与区间内输出最大力矩的大小是LATM的两个最重要的静态性能指标。
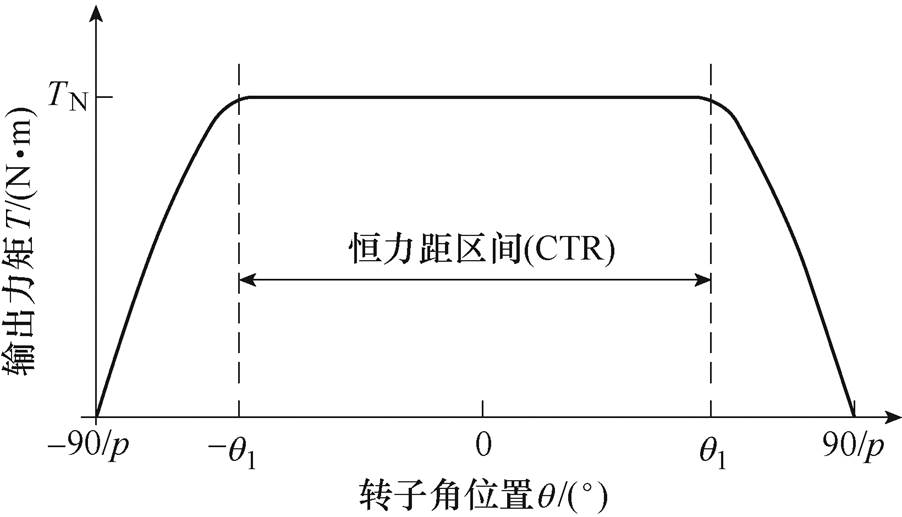
图2 有限转角力矩电机恒力矩区间
Fig.2 Illustration of the CTR of LATM
1.2.1 拓扑的分类与演变
LATM的结构种类繁多,其分类方式亦有多种,如可按励磁方式分为电磁式和永磁式,永磁式又可按照运动部件分为动圈式、动永磁体式和动软铁 式[2-3],按照运动方向还可以分为单向旋转和双向旋转[29]等,图3给出LATM按励磁方式的分类[30-31]。
由1.1节中的有限转角无刷直流电机可知,双向旋转LATM工作时具有以下特征:转子处于零位时,两个正交作用的磁动势使得转子旋转;随着转子向某一方向旋转角度的增大,两个磁动势方向夹角减小直至同向。以下依据结构特点分为两条思路,由有限转角无刷直流电机通过结构演变得到几种LATM的主要拓扑:由有限转角无刷直流电机演变为环形铁心式LATM,如图4所示;由有限转角无刷直流电机经继电器原理式到双边电励磁式最后演变为等极槽式LATM,如图5所示。
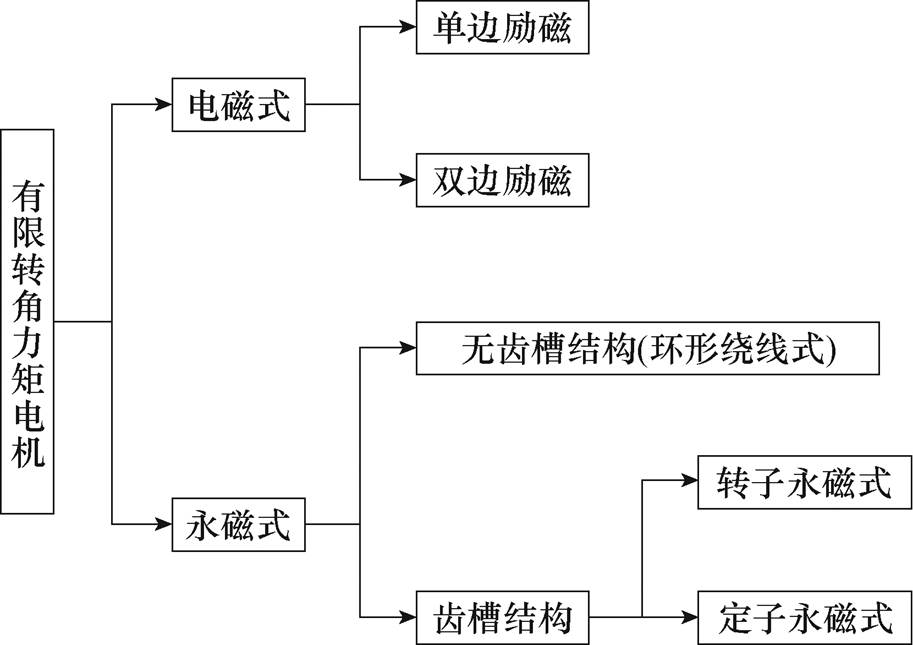
图3 有限转角力矩电机拓扑分类
Fig.3 Classification of LATM topologies
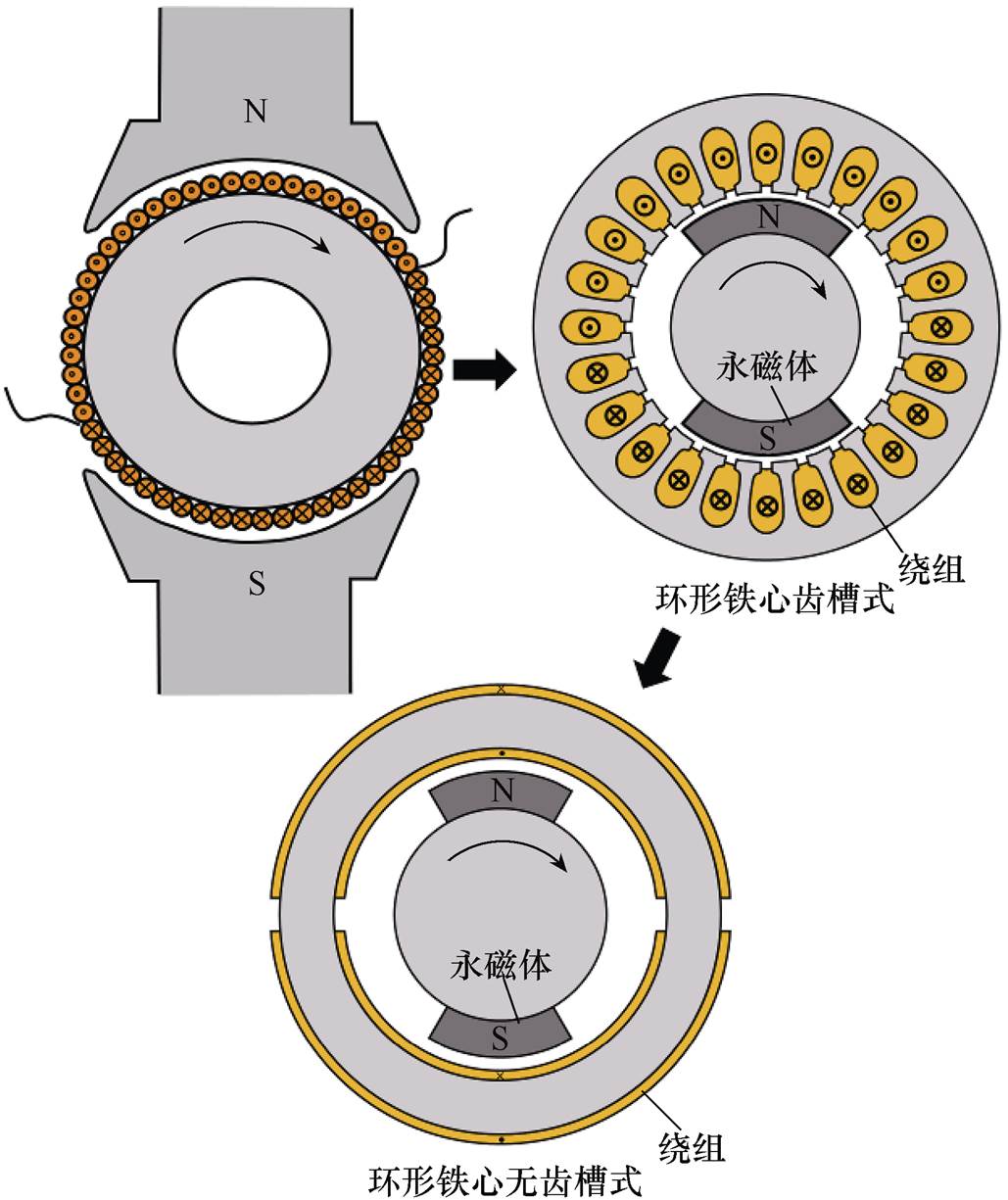
图4 环形铁心式有限转角力矩电机拓扑演变
Fig.4 Topological evolution of toroidal LATM
演变思路一:对有限转角无刷直流电机,定转子互换且转子的电励磁凸极结构变为永磁式结构即得到环形铁心齿槽式LATM;再将定子变为无齿槽结构、鼓形绕组改用环形绕组即得到环形铁心无齿槽式LATM。
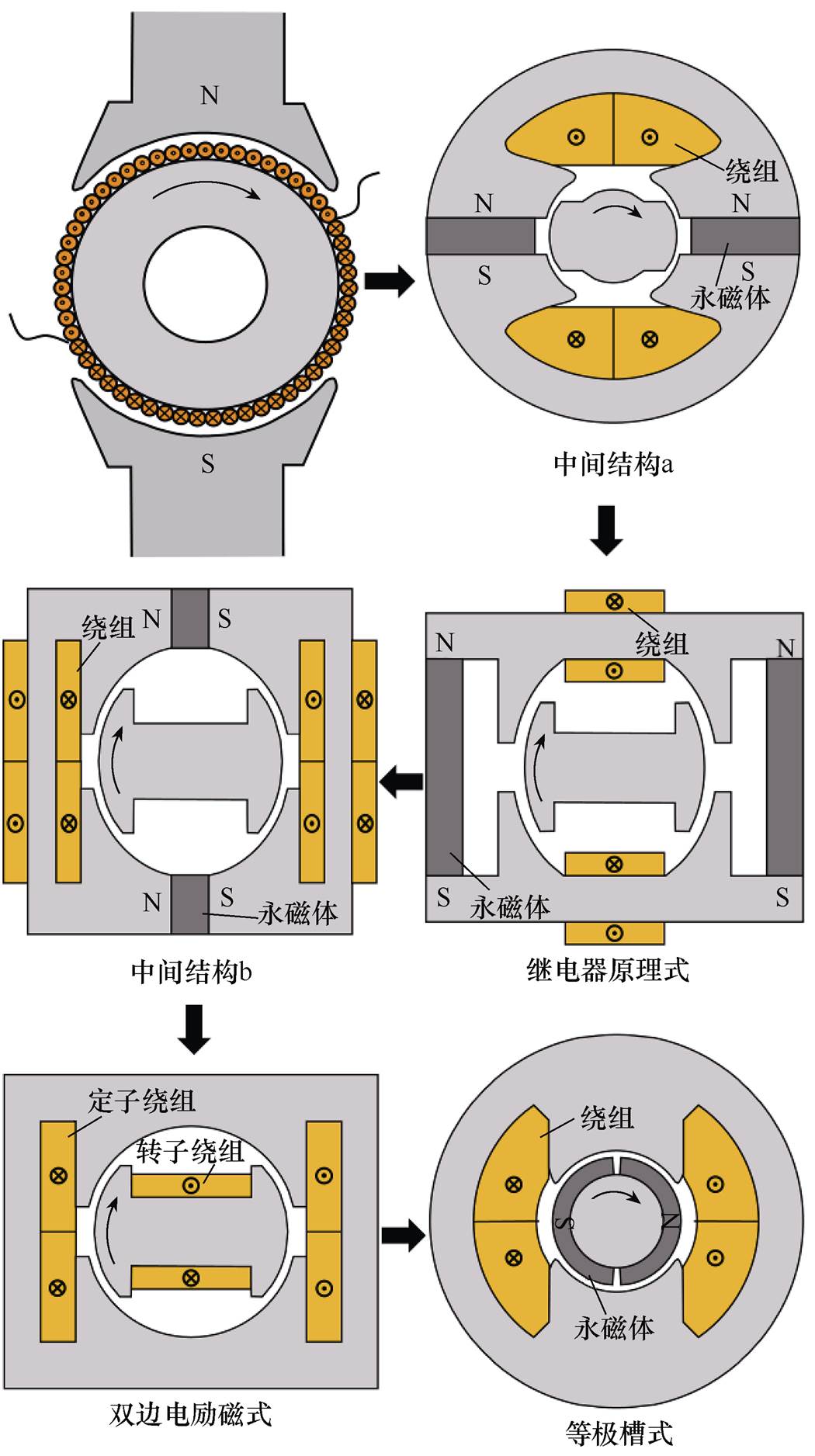
图5 等极槽式有限转角力矩电机拓扑演变
Fig.5 Topological evolution of equi-polar slot LATM
演变思路二:对有限转角无刷直流电机,将定子磁极开槽并嵌放原位于转子上的电枢绕组,经由极靴以继续提供水平方向的电枢磁动势,磁极改由竖直方向上励磁的永磁体经过磁轭和极靴继续提供竖直方向上的励磁磁动势,同时转子变为凸极铁心以产生磁阻转矩旋转,从而得到了中间结构a;中间结构a的圆形拓扑变为方形拓扑,集中绕组改用缠绕于定子轭部的环形绕组,即得到了继电器原理式LATM;再将定子上的永磁体和绕组分别用绕组和永磁体替换即得到了中间结构b;将中间结构b定子上的永磁体变为凸极铁心转子上的励磁绕组,以继续提供水平方向上的磁动势,即得到了双边电励磁式LATM;再将方形拓扑变为圆形拓扑,电励磁凸极转子变为永磁式结构,即得到了等极槽式LATM。
以上拓扑的工作原理由演变过程不难看出。需要说明的是,早期LATM的方形拓扑或电励磁结构是受限于永磁体材料的发展所造成的。实际上,中间结构a以及永磁体表贴式结构都是在稀土永磁体发展以后才得到应用,近年来,国内有学者针对中间结构a进行研究[32-35]。由以上演变可见,等极槽式其实就是继电器原理式的优化结构。而永磁体表贴式转子结构的环形铁心式和等极槽式LATM也是目前应用最为广泛的两种拓扑结构。
1.2.2 主要拓扑介绍
继电器原理式(Laws’s relay)首先于1952年由A. E. Laws提出,其工作原理基于“磁阻最小原理”且存在多种变体结构。作为最早的定子永磁式无刷电机[36],继电器原理式的电枢绕组和励磁永磁体均在定子侧,这使得其转子结构简单、坚固可靠。继电器原理式常见为如图5所示的两极旋转结构,但是采用多极、电励磁及直线结构也都是可行的[6, 37-38],一种直线结构如图6所示。
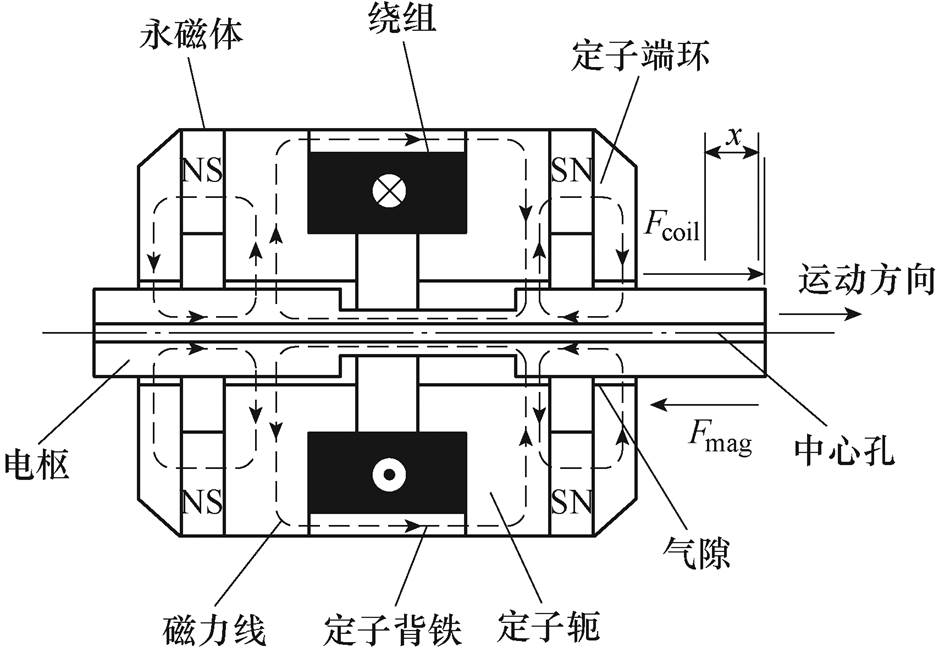
图6 继电器原理式直线作动器[38]
Fig.6 Laws’s relay linear actuator[38]
对于LATM的理论研究,直到1978年,英国的C. Dawson和H. R. Bolton才首次对双边电励磁式LATM的矩角特性进行了分析,并指出了矩角特性中力矩的变化主要受定子铁心饱和的影响[4]。由于双边励磁使得定子铁心不易出现饱和,因而其相较于继电器原理式有更大的CTR,但两种结构均因存在磁阻转矩使得矩角特性为穹顶形状。由于仅在有限转角内转动,双边电励磁式的转子励磁绕组可以直接由柔软导线作为引出线。
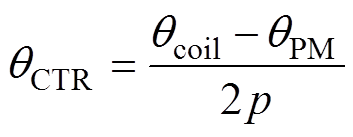
同样是C. Dawson和H. R. Bolton,在1982年首次对环形铁心无齿槽式进行了分析[31]。环形铁心式与双边电励磁式均出于扩大CTR的需求于同一时期被提出。早期的环形铁心无齿槽式与双边电励磁式的矩角特性类似,二者最大区别在于环形铁心式采用了永磁转子因而没有绕组焦耳损耗以及引出线,二者之间的经济性比较与电机的尺寸有关。理想情况下,图4中径向充磁的稀土永磁表贴式转子与气隙中均匀电枢绕组作用,有
 (1)
(1)
式中, 为恒力矩区间的大小;
为恒力矩区间的大小; 为绕组相带所占总的机械角度;
为绕组相带所占总的机械角度; 为永磁体所占总的机械角度。当电流一定时,永磁转子的极弧系数a 与矩角特性波形的关系如图7所示,该图亦反映了工作区间内的力矩幅值与CTR的矛盾关系。
为永磁体所占总的机械角度。当电流一定时,永磁转子的极弧系数a 与矩角特性波形的关系如图7所示,该图亦反映了工作区间内的力矩幅值与CTR的矛盾关系。
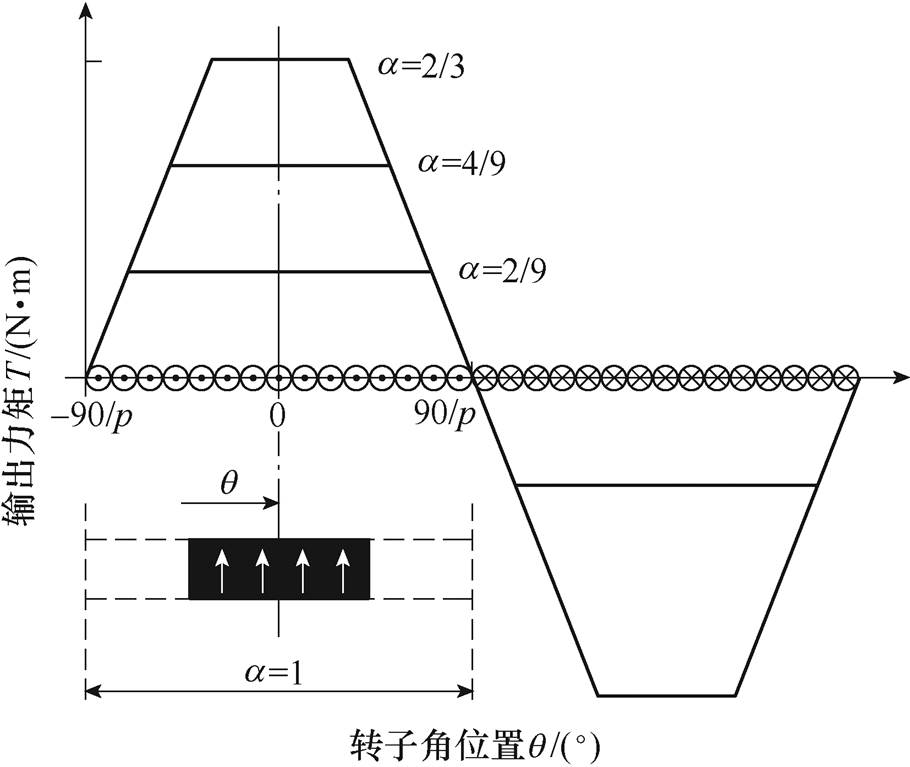
图7 环形铁心无齿槽式有限转角力矩电机的矩角特性
Fig.7 Torque-angle characteristic of toroidal slotless LATM
随着永磁体材料的发展,环形铁心无齿槽式因其出色的CTR而迅速占领了LATM的市场,目前有关LTAM的文献大多都是对环形铁心式特别是无齿槽式LATM的研究[17, 29, 31, 39-51]。由于环形铁心无齿槽式LATM的绕组直接存在于气隙中且绕组利用率低导致其力矩密度较低,同时为获得理想的输出性能,该结构对于绕线的工艺有一定的要求,如要做到每层导体数相等以获得在铁心内圆上均匀排列的电枢绕组[39, 41]。出于提升力矩密度的目的,学者们提出了环形铁心齿槽式LATM。其绕组嵌放于定子槽中从而增大了气隙磁通密度,同时齿槽结构为绕组提供了更好的散热条件,从而提高了工作电流密度。然而,环形铁心齿槽式有限转角力矩电机的矩角特性如图8所示,定子开槽引入了齿槽转矩从而影响了其应用[40, 45]。
等极槽式同样在永磁体材料发展以后得到应用。由于其CTR同样受齿槽转矩的影响而难以确定,因而应用并不如环形铁心无齿槽式广泛,多见于相关文献中对已有工业产品的介绍,直到1994年,M. Christian才直接对等极槽式结构进行研究分析[52]。该结构巧妙地利用了等极槽结构的特点,从而在一定区间内避免了定子开槽带来的影响,当铁磁材料处于线性状态时,其齿槽转矩可以用单极-槽口单元模型来分析。当转子在图5所示磁极对着槽口位置左右两边的工作区间内转动时,如果定子铁心材料始终处于线性状态,则在该区间内磁阻与磁共能大小基本保持不变,也即齿槽转矩基本为零。由于产生明显齿槽转矩的区间通常大于槽口宽,因而等极槽式的CTR大概为一半的槽距角[53]。
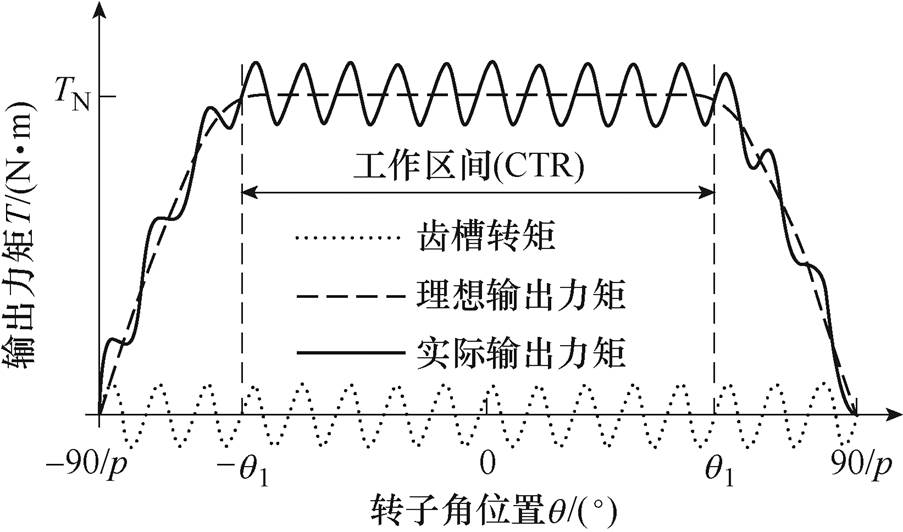
图8 环形铁心齿槽式有限转角力矩电机的矩角特性
Fig.8 Torque-angle characteristic of toroidal slotted LATM
考虑到齿槽转矩以及铁心利用率的问题,等极槽式一般采用四极及以上的极数,相较于采用鼓形绕组的环形铁心齿槽式,其集中绕组具有更短的绕组端部从而降低了铜耗。等极槽式在保留了高力矩密度的同时又具备一定的CTR,从而等极槽式与环形铁心无齿槽式成为目前LATM研究的两大热点拓扑。国内哈尔滨工业大学的邹继斌和禹国栋等近年来针对等极槽式LATM的性能分析、结构设计与优化等方面进行了深入研究[30, 54-61]。
根据不同领域的应用需求,LATM形成了多种多样的拓扑结构,以上五种主要拓扑就有许多变体结构,本节就LATM其他的一些拓扑结构进行补充。
环形铁心式除了图4中极弧系数小于1的结构外,还有一种极弧系数约等于1而绕组相带较小的结构,如图9所示。
图9a所示结构在一些小型的、对CTR要求低的LATM中有应用,如振镜电机,在这类电机中转子永磁体一般直接采用两极的磁环,定子绕组一般采用鼓形绕组使其结构紧凑,便于加工制造。图9b所示结构由于其齿槽转矩而没有应用[47],实际上如果将该结构的空槽变为铁心,相邻的通同向电流的槽整合为一个槽就演变为了等极槽式结构,这反映了等极槽式LATM的优越性以及各主要拓扑工作原理的统一性。
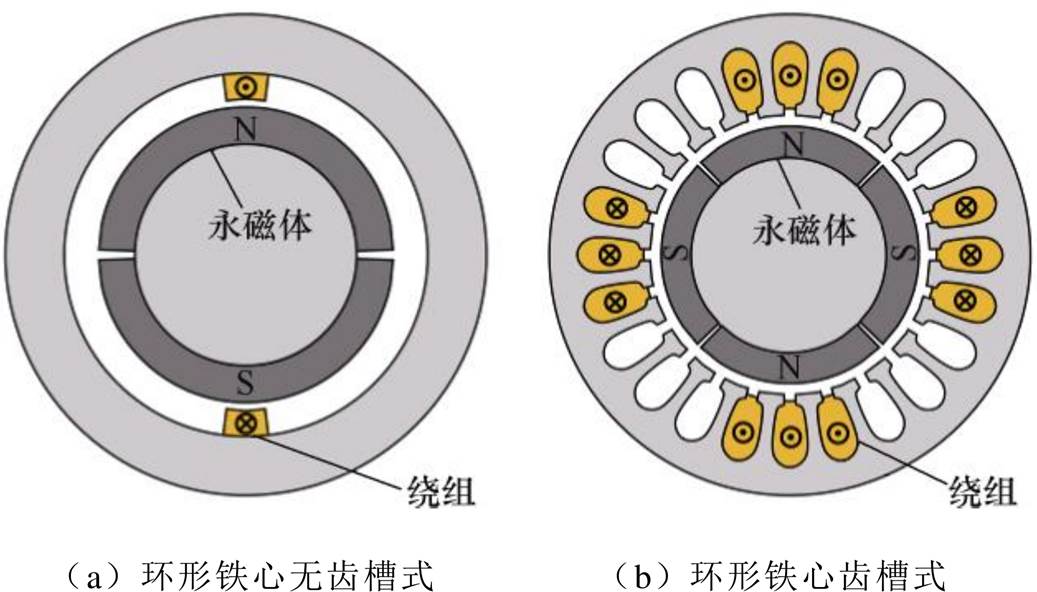
图9 宽极弧环形铁心式有限转角力矩电机
Fig.9 Toroidal LATM with wide pole arc
值得一提的是,LATM与同为在有限区间内工作的音圈电机(Voice Coil Motor,VCM)极为相似,只是LATM是一种特种旋转电机而VCM是一种特种直线电机,且VCM更加重视高频响应、高精度等性能,因而其运动部件多为线圈[19, 30]。音圈电机中有一类轴向磁通弧形结构常应用于硬盘驱动器中,如图10a所示[63]。该结构作为旋转式的VCM可以看作轴向磁通结构的环形铁心无齿槽式LATM的弧形结构,因而环形铁心式LATM的优化设计亦可参考研究较多的VCM[10, 64-67]。此外,还有其他一些弧形结构的LATM应用于特定领域[13-14, 62],如图10b~图10d所示。
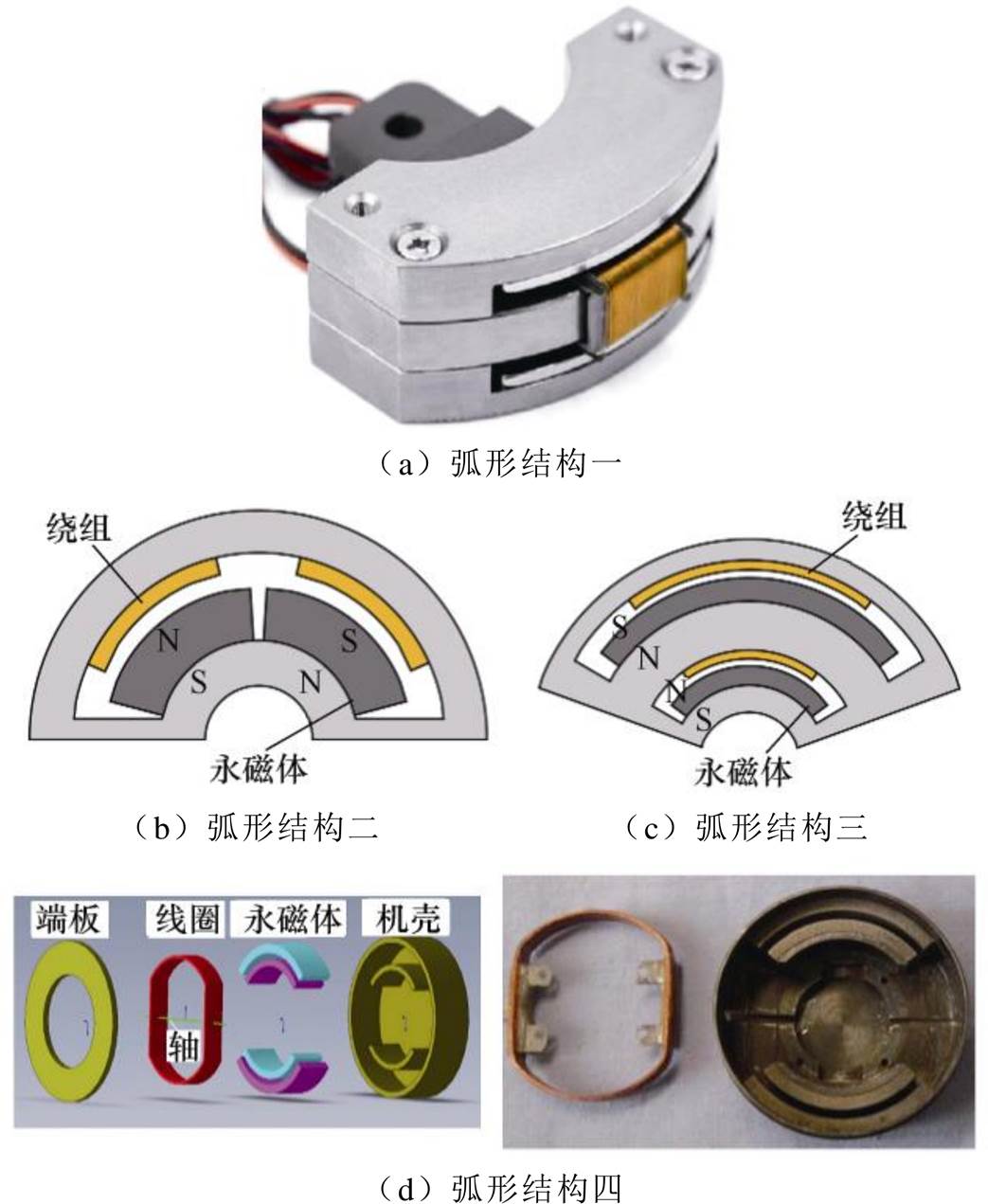
图10 弧形结构有限转角力矩电机[19, 62]
Fig.10 Arc structure LATM[19, 62]
有一种单向旋转的轴向磁通变磁阻LATM,由于其较低的成本而在汽车的各种气路阀门中得到广泛应用[68-70]。该电机仅有一套用于轴向励磁的线圈,其“蝴蝶结”状的转子与定子及导磁外壳形成闭合磁路,利用转子转动时的变磁阻效应以提供力矩,如图11a所示。由于轴向磁通的结构使得铁心的导磁面积增加而不容易出现饱和,因此其矩角特性十分优异。图11b、图11c展示了其他一些轴向磁通结构的LATM。
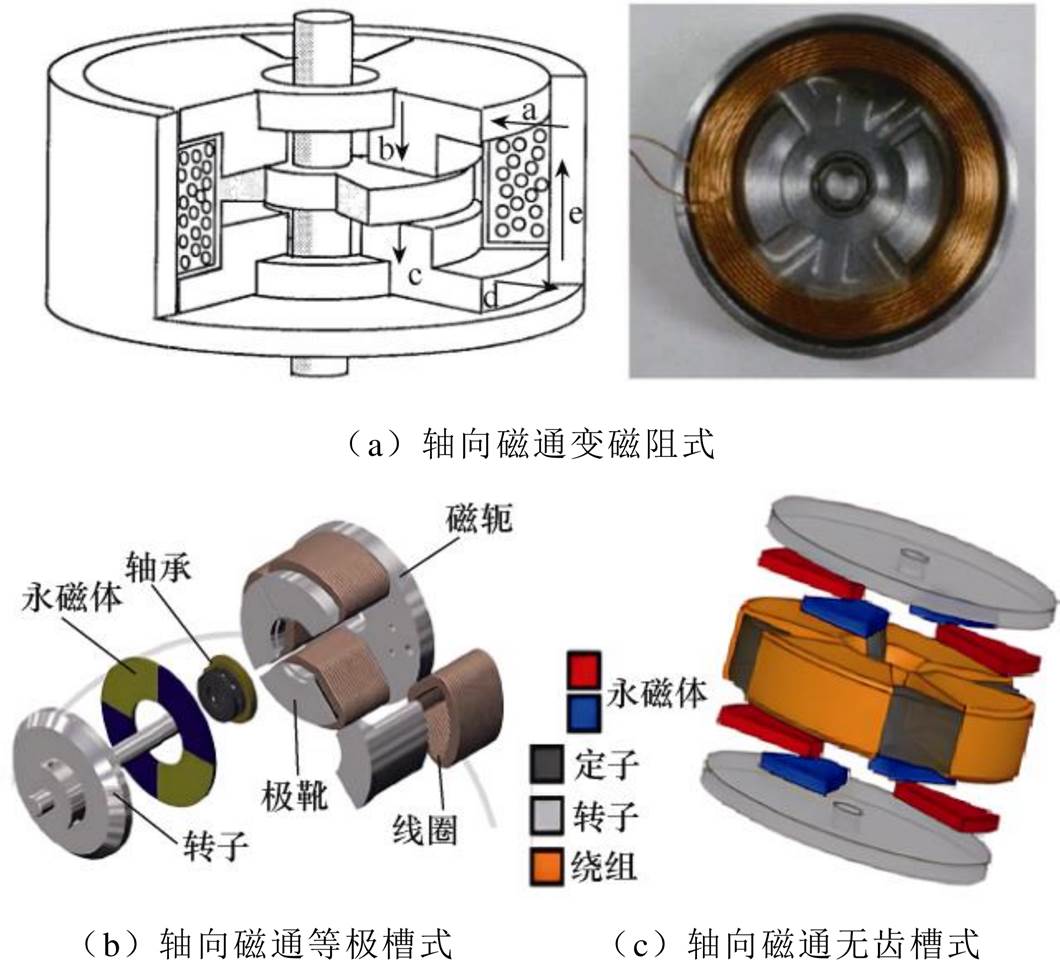
图11 轴向磁通有限转角力矩电机[68-71]
Fig.11 Axial flux LATM[68-71]
还有一些特殊的有限转角电机主要关注有限转角和定位等功能,其矩角特性其实已经不再符合前述对于LATM的要求,其中一些拓扑结构如图12所示[26-72, 73]。
LATM作为一类特种电机具有其独特的拓扑结构及矩角特性的要求,使得其在设计考虑上区别于常规电机。按照第1节工作原理中的规定,环形铁心无齿槽式以及等极槽式的矩角特性分别如图13a和图13b所示。由图13可见,这两种拓扑在工作区间内均不能输出恒定的力矩,原因如下:对于环形铁心无齿槽式LATM,当转子位于如图4所示零位时,其电枢反应的影响为一半助磁、一半去磁,如图14a所示。随着转子向正向旋转,电枢反应助磁作用增强,由于电机仅有磁极下的绕组产生力矩,且分布于气隙中的环形绕组直接受到电枢反应作用后气隙磁场的作用,使得正向旋转时输出力矩随着转角的增大而增大,如图13a所示。
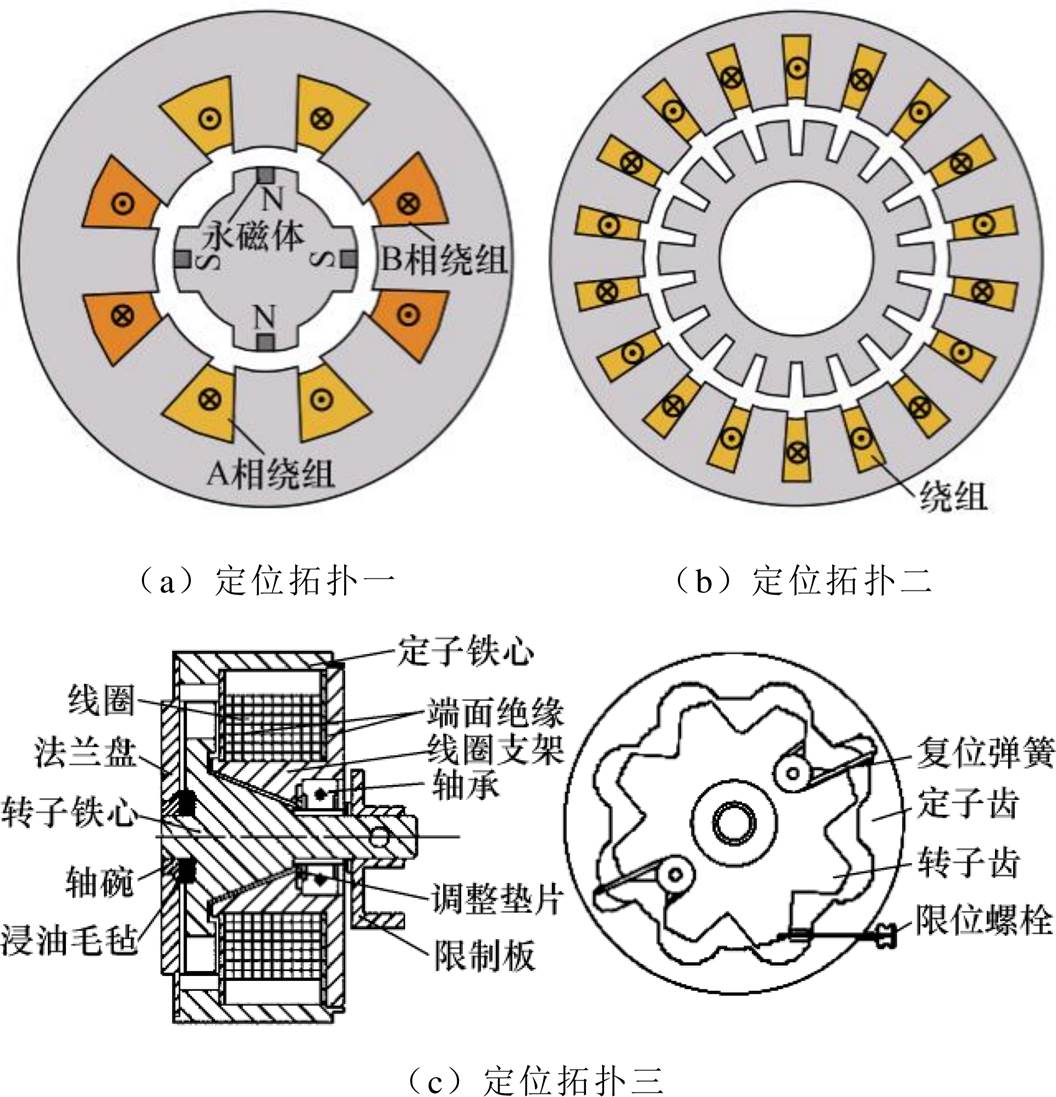
图12 定位有限转角力矩电机[26]
Fig.12 LATM for positiooning[26]
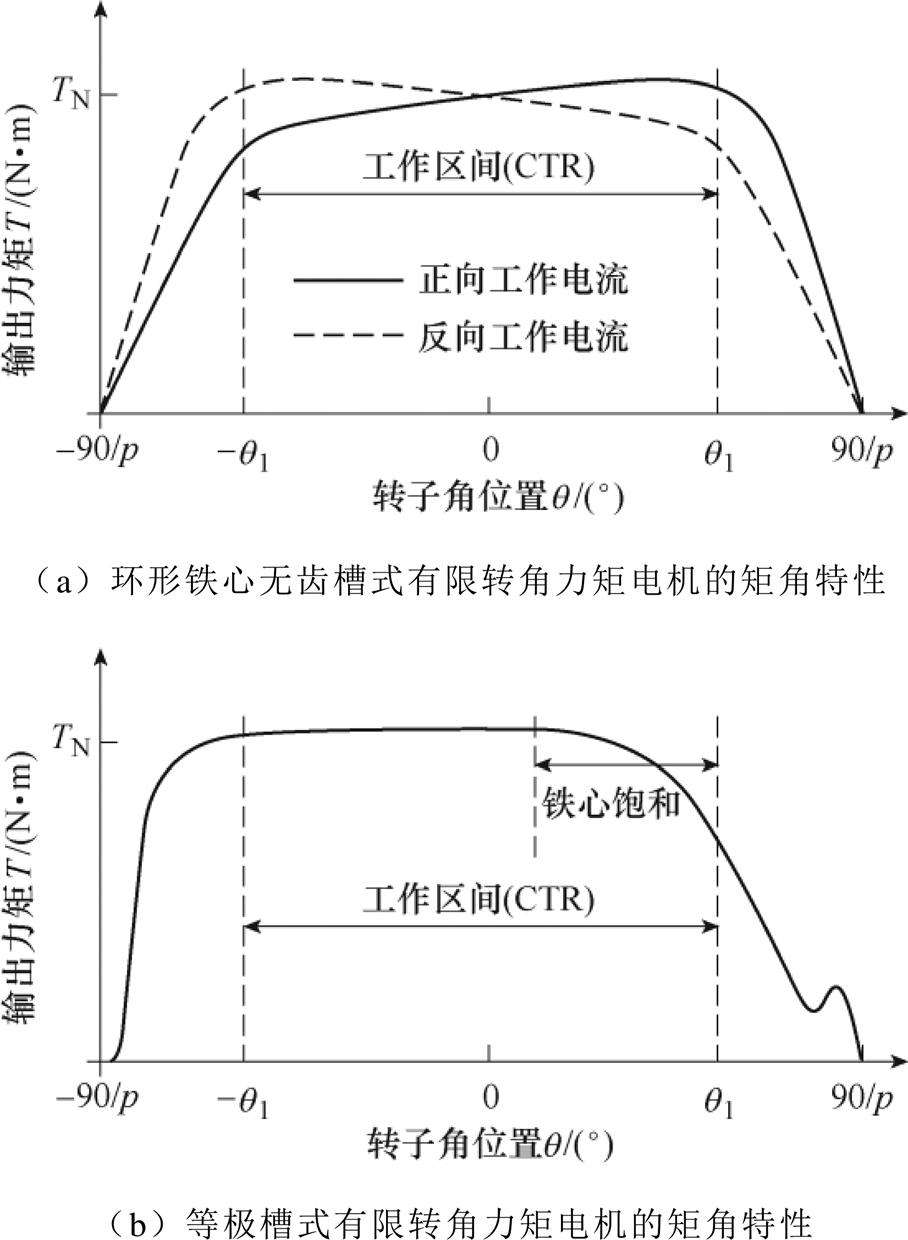
图13 有限转角力矩电机的矩角特性
Fig.13 Torque-angle characteristicsof LATMs
对于等极槽式LATM,电枢磁场通过影响定子铁心的饱和程度,进而改变矩角特性。空载时,当转子位于如图5所示位置时,等极槽的结构使得励磁磁场仅经由定子齿顶部闭合,随着转子旋转角度的增大,经由定子齿和磁轭闭合的励磁磁通占比将越来越大,在图14b中体现为单个定子齿中磁动势的积分从零随着转子旋转角度增大而增大。由于电机采用集中绕组,负载时单个定子齿上的电枢磁动势极性确定,且电枢磁场全部经由定子齿和磁轭闭合,在图14b中体现为单个定子齿上的磁动势积分总是增大了电枢磁动势的部分。因而,随着转子向正向旋转,经由定子齿和磁轭闭合的总磁通越来越大,一旦定子铁心材料在某一转角位置达到拐点,则在此之后的正转角工作区间内铁心将会越来越饱和,从而减少了绕组匝链磁链的变化,最后造成力矩跌落,如图13b所示。
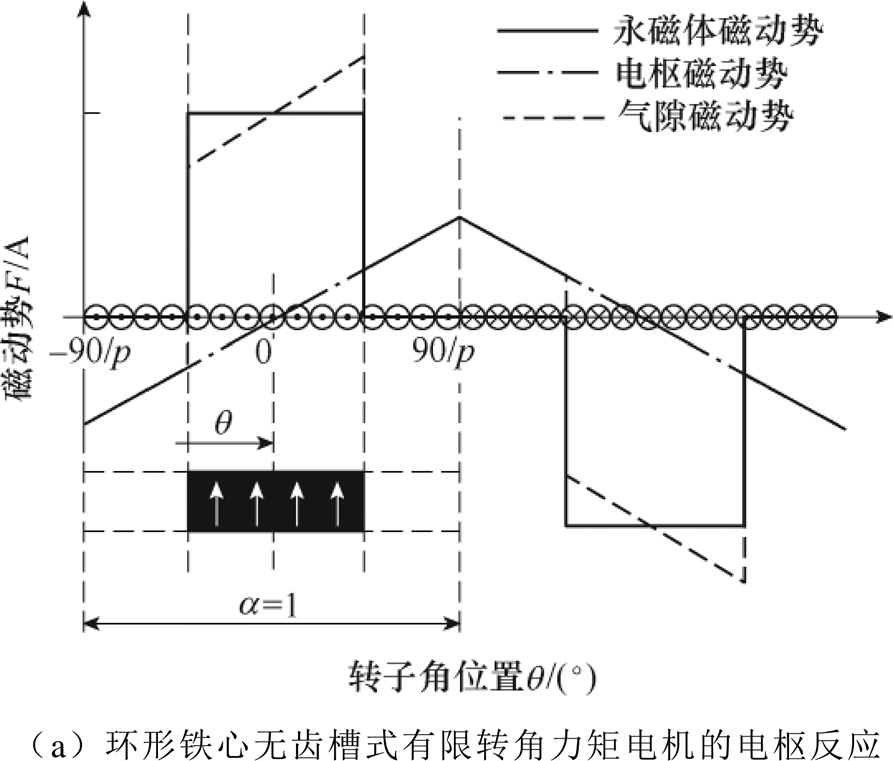
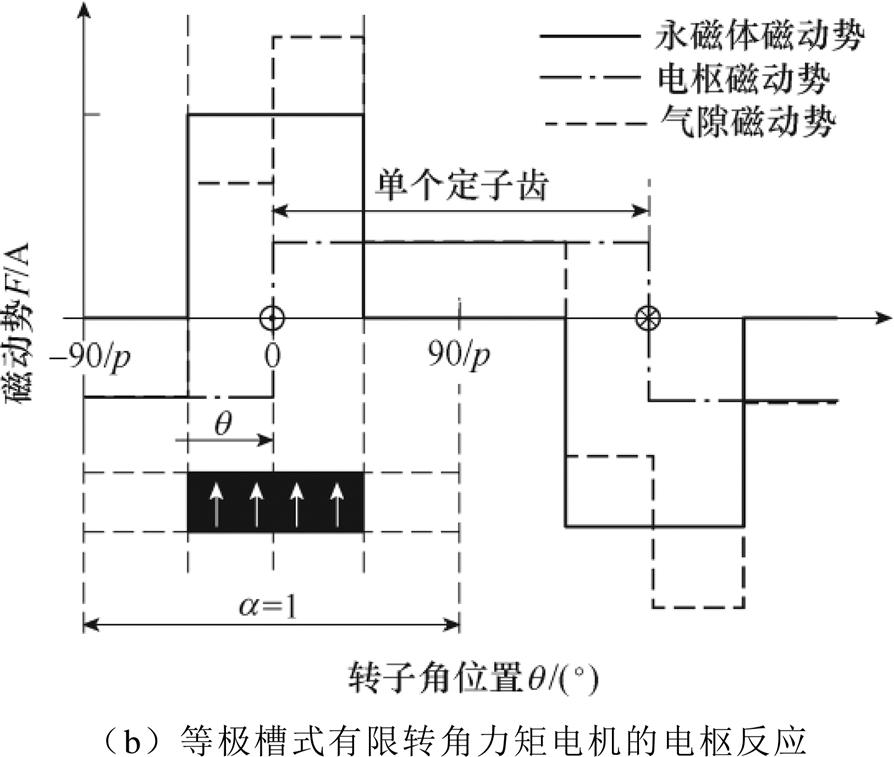
图14 有限转角力矩电机的电枢反应
Fig.14 Armature reaction of LATM
本节就LATM的设计方法和矩角特性的优化这两方面进行综述。
2.1.1 等效磁路法
等效磁路(Equivalent Magnetic Circuit, EMC)法可以通过选择是否考虑多层磁网络、铁磁材料非线性及随空间和时间变化的磁阻以获得不同的模型精度。文献[4]首次利用EMC研究了双边电励磁式LATM,将同一齿下对应不同极性极面的两个部分划分为随转角位置变化的两个磁阻元件,结合磁共能法推导出线性情况下在工作区间内的力矩公式。文献[4]还指出,铁心磁阻对于矩角特性的影响很大,在考虑铁磁材料的非线性时应根据材料特性采用迭代法逐转角计算矩角特性。由第1节的演变可知,继电器原理式[6, 32-33]和等极槽式LATM[30, 57, 60]均可采用将定子齿分为两部分的EMC来分析矩角特性:文献[6]通过与实测矩角特性的比较,说明了在铁心高度饱和的状态下,由于忽略了漏磁路的影响以及集总磁路元件的误差,即便采用迭代法考虑了铁磁材料的非线性也有较大误差;文献[60]则考虑了主极磁场和电枢磁场的漏磁路,建立了更为精确的EMC,如图15所示,其计算结果与有限元计算结果吻合,但是模型的建立与求解较为复杂。因此,在设计需要工作于铁心高度饱和状态的齿槽式LATM时可采用其他方法。
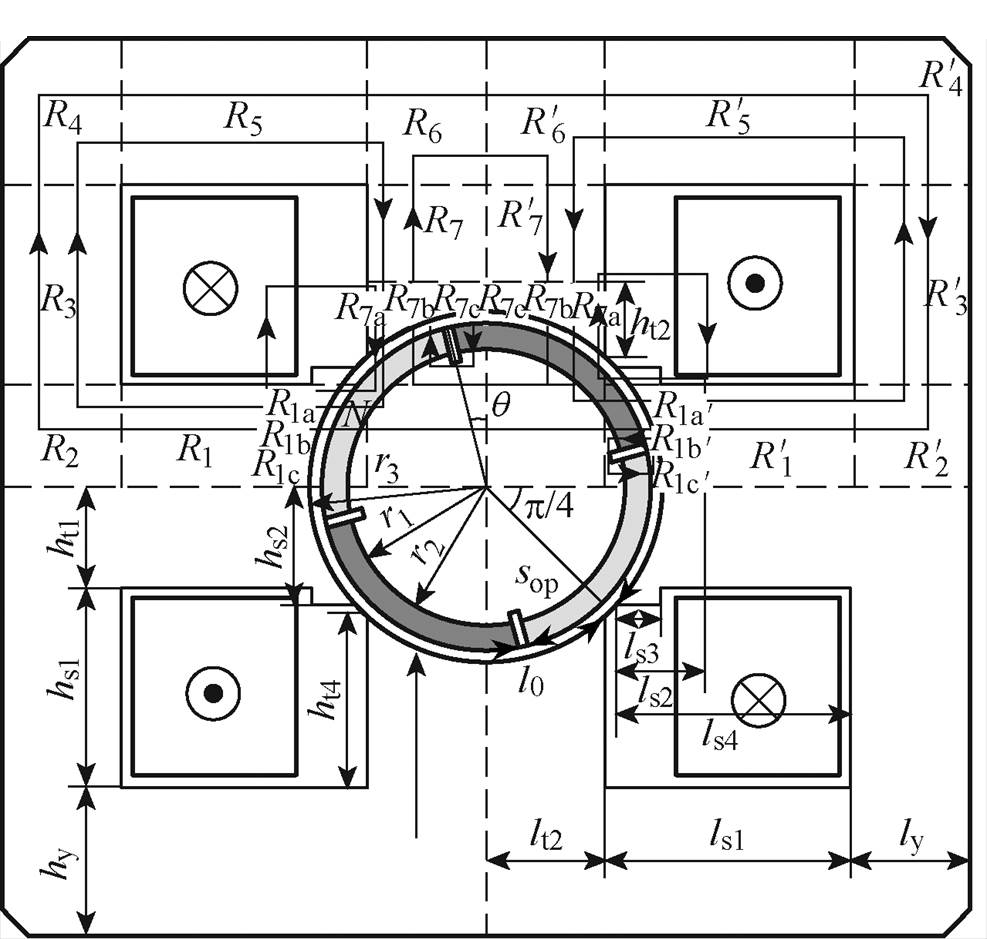
图15 等极槽式有限转角力矩电机的等效磁路模型[60]
Fig.15 Equivalent magnetic circuit model of equi-polar slot LATM[60]
有关环形铁心无齿槽式EMC的研究较多也更为全面[31, 39, 41, 43-44, 46-48, 62, 71, 74]:文献[31]推导了环形铁心无齿槽式LATM采用不同转子结构时的电感参数;文献[41, 43]通过将电枢磁动势分为极面下的固定部分和不在极面下的随转子转角位置变化的部分,从而考虑了电枢反应的影响;文献[71, 74]给出了轴向磁通结构的环形铁心无齿槽式LATM的EMC,并说明铁心饱和同样会造成环形铁心式LATM输出力矩的跌落;文献[44, 46]考虑了铁磁材料的非线性,对环形铁心无齿槽式的EMC做了更为细致的划分,且提出了基于转子坐标系的广义EMC以便于求解。环形铁心无齿槽式有限转角力矩电机的等效磁路模型如图16所示。
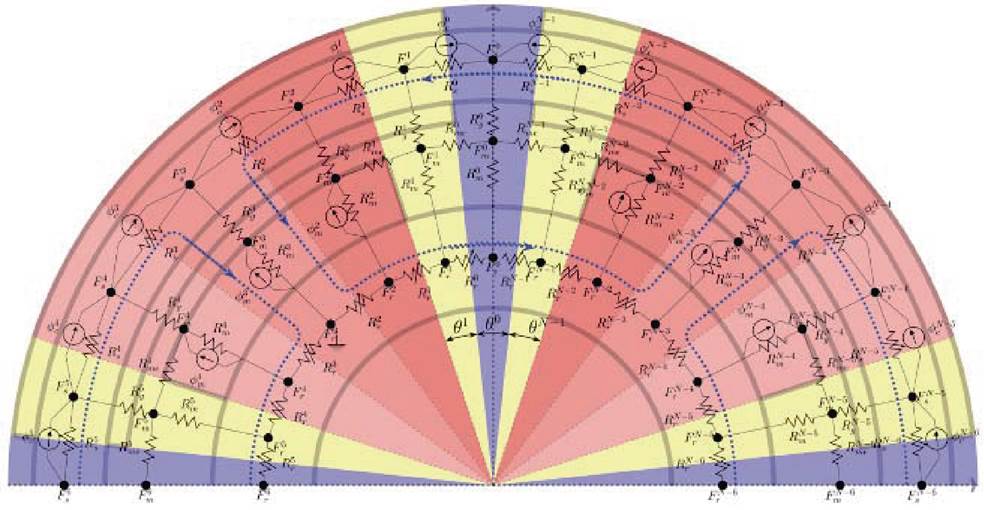
图16 环形铁心无齿槽式有限转角力矩电机的等效磁路模型[44]
Fig.16 Equivalent magnetic circuit model of toroidal slotless LATM[44]
另外,文献[75]还基于迭代计算将热路法与EMC结合,得到了双边电励磁式LATM基于绕组温升的电磁力矩公式,从而可以快速评估尺寸变化对于电机过载系数等重要性能的影响;文献[68]建立了变磁阻轴向磁通LATM的EMC,并且推导了在驱动器给定情况下的设计公式。
2.1.2 解析法
解析法多与计算机结合用于电机的参数优化,相比于直接用有限元法,可以节约大量时间[76-77]。文献[71]将轴向磁通结构的环形铁心无齿槽式LATM设计在材料线性区,从而可将EMC计算的永磁体励磁磁场与准三维解析模型计算的电枢反应磁场叠加得到磁场分布;文献[30, 54, 59]通过简化定子齿部以及假设铁心磁导率无穷大,利用磁场子域模型可以快速计算等极槽式LATM的齿槽转矩,从而给出CTR,并且用于结构参数的优化,文献还给出了不同极槽数的等极槽式LATM的CTR参考值用于初步的设计参考,等极槽式有限转角力矩电机的恒力矩区间估计见表1;文献[45]在铁心磁导率无穷大的假设下,分别建立了外转子和内转子结构的环形铁心无齿槽式LATM的磁场子域模型,并推导得到了电磁力矩的解析公式。
表1 等极槽式有限转角力矩电机的恒力矩区间估计[59]
Tab.1 Estimation of CTR for equi-polar slot LATM[59]

极槽数恒力矩区间/(°) 4/436 6/622 8/816 10/1011 12/127
2.1.3 有限元法
EMC和解析法均不能精确地考虑铁心饱和的情况,然而LATM的铁心在过载时一般设计在饱和状态,尤其是齿槽式结构的力矩特性将同时受齿槽转矩和材料饱和的影响,从而CTR变得难以估计,所以有限元法对于LATM的设计是不可或缺 的[6, 13, 30, 61, 68, 78]。文献[61]还利用有限元法通过多项式函数拟合得到等极槽式LATM的输出力矩与定子齿槽相关尺寸的联系,并用于矩角特性的优化。
2.1.4 决策法
随着计算机的发展,利用各种优化算法对电机细节尺寸进行优化已成为趋势[79-81]。LATM的优化目标一般为最大化力矩/电流、力矩/惯量和CTR,以及最小化体积与损耗[44, 46, 48, 60-62, 74, 82]。
伊朗M. Mirsalim等将科学决策方法应用于LATM,针对多方案进行性能、制造工艺和经济性等多方面的比较,以确定最优设计方案。文献[42]采用了公理化设计(Axiomatic Design, AD)方法,考虑了成本和热性能两个标准,通过计算信息公理中的信息量来选择最佳的制造工艺方案;文献[43]采用层次分析(Analytic Hierarchy Process, AHP)法,从质量、体积、时间常数、铜损和机械间隙五个方面进行考量来选择最优设计;文献[83]则比较了公理化设计与层次分析法两种方法,指出公理化设计最小化了专家判断的影响,更符合工业设计的需求。
多目标优化算法虽然能够找到最优解,但是十分耗时并且占用计算资源。科学决策方法可以方便考虑更多因素,在众多设计中选择出最优解,但这些设计不一定涵盖全局最优解。因而,可以采用多目标优化算法与决策法相结合的方式以节省计算资源,获得较优的设计。
2.2.1 力矩波动
CTR是LATM的重要性能指标,理想情况下其仅与永磁体极弧系数、绕组相带大小及槽口宽度等尺寸参数有关。然而在实际工作中,齿槽转矩、电枢反应及铁磁材料的非线性将会导致矩角特性恶化从而使得CTR减小,因而力矩波动的优化问题一直是研究热点[29-30, 47, 50-51, 55, 57, 60-61, 84-85]。
针对环形铁心式受电枢反应影响的问题,文献[29]提出将可变电阻并联于被分成各个小区间的电枢绕组中,从而可以任意改变输入电流与输出力矩的函数关系,该改进形式称为具有线性补偿的LATM。
针对环形铁心齿槽式受齿槽转矩影响的问题,文献[50, 84]研究了开辅助槽、斜极和斜槽对于齿槽转矩和输出力矩的影响,分析认为,由于斜极、斜槽会降低输出力矩的大小,因此建议采用开辅助槽来降低齿槽转矩,但是该方法效果有限;文献[47, 51]在定子上额外添加一个空槽,以提高齿槽转矩基波的谐波次数,从而减小了齿槽转矩的峰峰值,但是该方法会带来不平衡磁拉力。
针对等极槽式易受定子齿部饱和影响的问题,文献[55, 61]通过将平行齿尖优化为尖角形齿尖,增大了槽口的磁阻,从而减小了通过相邻齿尖闭合的电枢漏磁,减小了极靴的饱和程度进而改善了矩角特性;文献[30, 57, 60]进一步将等极槽式的定子结构改为方形,从而增大了定子齿的体积使其更不易饱和,同时还针对该结构提出了将线圈仅缠绕在一半的定子齿上的方法,可以更加灵活地设计没有缠绕线圈的齿以优化齿槽转矩。
2.2.2 CTR的优化
除了对工作区间内力矩波动问题的研究以外,如何进一步提高CTR内的输出力矩以及拓宽CTR亦是LATM的研究热点[47, 50, 57, 60, 71, 86, 87]。
针对输出力矩的提升,文献[10, 74, 86]均在环形铁心无齿槽式中采用了Halbach的磁极阵列结构,通过增大永磁体厚度的方式以增大气隙磁通密度进而提高输出力矩,但该方法会减小CTR;文献[71]针对轴向磁通结构的环形铁心无齿槽式LATM绕组内圆更厚的问题,提出将电枢磁轭改为截面为梯形的环轭,从而将等气隙改为等物理间隙的结构,在相同体积和输入功率的情况下将输出力矩提升了17%;文献[57, 60]通过将等极槽式圆形结构的定子改为方形,同时扩大了槽面积和齿面积,从而在减小齿槽转矩的同时将输出力矩提升了约20%。
针对CTR的进一步拓宽,文献[46]在环形铁心无齿槽式LATM中采用准Halbach的磁极阵列结构,并结合EMC进行了多目标优化,发现该结构可以在提升气隙磁通密度的同时使得气隙磁通密度更加平稳,从而在一定程度上消除了工作区间内的力矩波动,扩大了CTR;文献[87]改进了环形铁心无齿槽式LATM,提出了单极宽转角力矩电机(Unipolar Wide Angle Torque motor, UWAT)和双极宽转角力矩电机(Bi-polar Wide Angle Torque motor, BWAT)两种结构,如图17所示,两种结构都将CTR拓宽到了270 °左右,但是均会造成输出力矩的下降;文献[47, 50]根据环形铁心式矩角特性的特征,提出利用CTR以外的线性区域,通过控制电枢电流以扩大CTR,在同样的极弧系数下可以将原本50 °的CTR扩大至60 °。
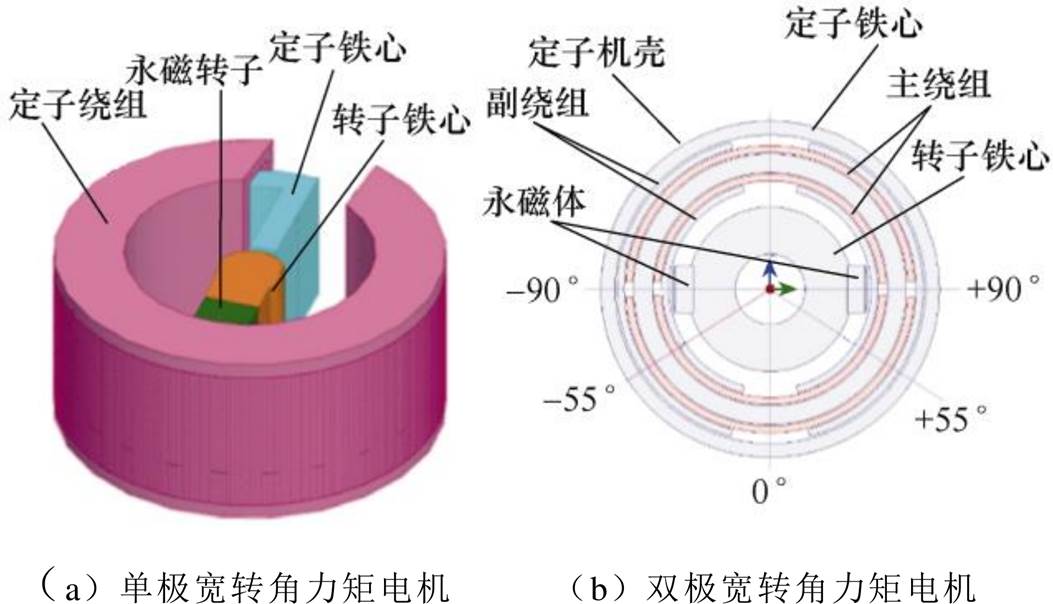
图17 宽转角力矩电机[87]
Fig.17 Wide angle torque motor[87]
最后,由于LATM的力矩波动和力矩密度都与铁磁材料的性能有关,因此研究饱和点更高的、加工性能好的铁磁材料对于提高LATM的性能至关重要[3, 17, 37, 61, 88-89]。
在CTR内LATM无法独自实现定位功能,因此LATM常与回中弹簧配合应用于开环位置控制系统,或者与位置传感器配合应用于闭环位置控制系统,恒力矩矩角特性如图18a所示。对于继电器原理式和双边电励磁式,由于矩角特性为穹顶形状,实际上过去多将其矩角特性直接设计为斜率为负的直线以应用于定位要求不高的开环位置控制系统,线性变力矩矩角特性如图18b所示[6]。得益于电力电子器件的快速发展,闭环控制的成本越来越低,又由于其相比于开环控制动态性能更好、位置控制精度更高,因而目前LATM基本都采用闭环控制。不过,在许多应用中出于可靠性的考虑,为了能使LATM在断电时回到安全位置通常加装回中弹簧,另外回中弹簧对于来回摆动的工作模式也有益处。
然而由第2节可知,CTR并不是真正的恒力矩区间,且LATM的输出力矩会受到铁磁材料饱和等多种因素的影响,实际应用时又会受到温度及负载等因素的干扰。因而,对于LATM这个多变量的非线性时变系统,想要获得理想的动态性能就需要研究其精确的数学模型或者采用鲁棒性强的控制方法。
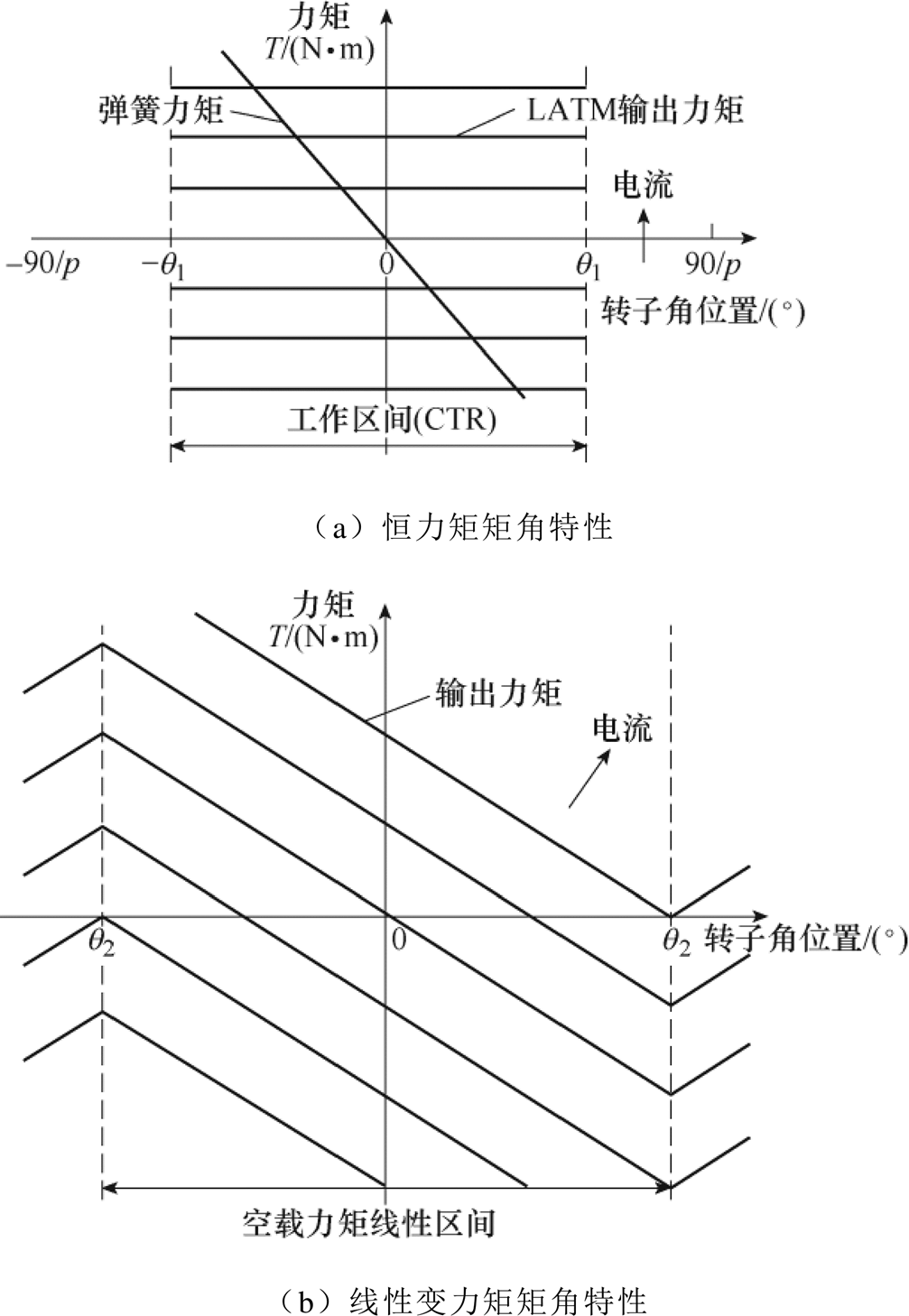
图18 不同应用的矩角特性
Fig.18 Torque-angle characteristics for different applications
3.1.1 线性数学模型
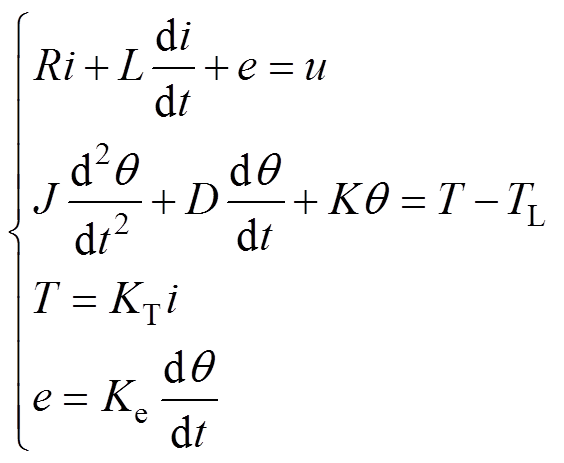
由第1节的有限转角无刷直流电机及矩角特性可知,LATM的线性数学模型可以直接类比直流电机推导[15, 28, 30]得出
 (2)
(2)
式中,R为绕组电阻;i电枢电流;L为绕组电感;e为反电动势幅值;u为端电压;J为转子转动惯量; 为转子角位置;D为黏性阻尼系数;K为回中弹簧刚度;T为电磁力矩;TL为负载力矩;KT为电磁力矩系数;Ke为反电动势系数。
为转子角位置;D为黏性阻尼系数;K为回中弹簧刚度;T为电磁力矩;TL为负载力矩;KT为电磁力矩系数;Ke为反电动势系数。
线性数学模型通过拉普拉斯变化后得到的框图如图19所示。
3.1.2 精确数学模型
采用线性数学模型需要LATM的矩角特性完全符合图2的理想情况。而由第1节对拓扑结构的讨论可知,一些结构的输出力矩本就含有磁阻转矩或齿槽转矩,因而即便在铁磁材料处于线性状态时也不具备该条件,如继电器原理式。此外,由第2节矩角特性优化可知,实际工作时LATM的矩角特性受电枢反应的影响,因而也难以保证在CTR内输出恒定的力矩。为精确描述实际工作时非线性的矩角特性需要采用其他方法[90-91]。文献[11, 26, 30, 56, 58]采用有限元结合函数拟合的方法得到磁链、电感及电磁力矩的拟合函数,建立了LATM的精确数学模型;文献[9, 92]在线性模型的基础上,通过实验测量建立查阅表格来考虑矩角特性的变化;除了对LATM本身精确数学模型的构建以外,文献[9, 93]对摩擦、弹簧、机械间隙以及温度等电机电磁性能以外的非线性因素进行了分析,并建立了数学模型。
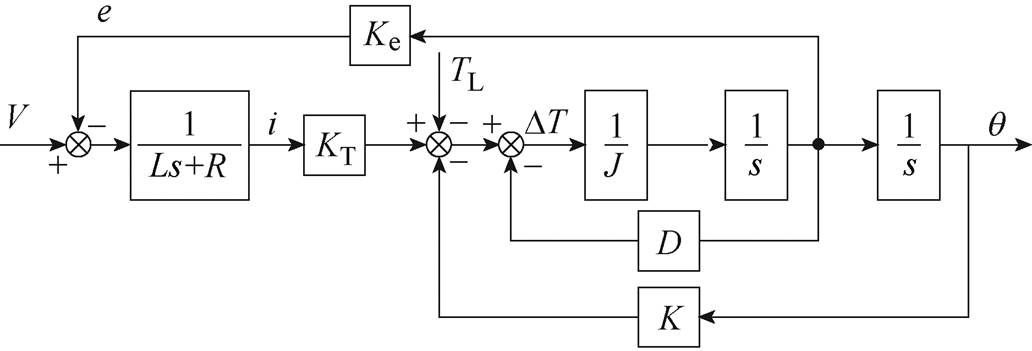
图19 有限转角力矩电机的线性数学模型框图
Fig.19 Block diagram of linear mathematical model of LATM
在考虑矩角特性的非线性时,以上方法需要依靠有限元或者实验测量来建立数据表,虽然表格建立好以后的动态特性仿真比起场路耦合法要节省不少时间,但是建立数据表依旧很耗时。因而采用鲁棒性强的控制方法是获得理想动态性能的更好选择。
3.2.1 线性控制方法
PID控制作为一种经典的控制方法,由于其简单、有效与实用的特性,目前仍是应用最广泛的控制方法[94]。PID控制常与LATM的线性数学模型结合进行动态性能的仿真和参数整定[11, 17, 56, 62, 78, 95-97]。文献[95]给出了针对LATM控制时调试PID参数的步骤,比较了三种不同的PID闭环控制方案,得出采用位置环、角加速度环、角速度环、电流环的四闭环控制方案性能最佳,并具有良好的抗负载干扰能力;为了适应对电机不同的控制需求,针对LATM的PID控制参数优化的问题,文献[27, 97]分别利用模糊控制和回溯搜索优化算法(Backtracking Search Optimization Algorithm, BSOA)对控制参数进行整定,优化后的控制器具有更快的响应速率、更小的超调量以及更强的抗干扰能力;考虑到PID控制的精度受系统数学模型的影响,文献[17, 56]分别通过将被控阀门的数学模型和考虑温度变化的热阻模块融入闭环控制,改善了PID控制器的鲁棒性。
3.2.2 非线性控制方法
除了将PID控制与其他控制相结合形成智能PID控制以提升控制器的鲁棒性以外,学者们还采用了各种现代控制方法以应对LATM在实际控制中受到负载扰动、电机参数变化及力矩特性非线性等因素影响造成的模型不确定的问题,其中主要应用的控制方法为滑模控制[9, 10, 67, 98-104]。文献[9, 99]分别提出了基于超螺旋算法的二阶滑模控制和基于径向基神经网络的滑模控制,并与传统PID控制比较得出滑模控制具有更好的稳定性、快速性及对于扰动的鲁棒性;文献[10, 67]均采用非线性高增益观测器(High Gain Observer, HGO)与滑模控制相结合的控制方法,提供了更加快速和精确的非线性自适应控制,其中文献[10]还利用基于谐波平衡法的改进双继电反馈法对LATM进行了参数识别。
此外,文献[98]提出一种基于非线性观测器的控制方法,其将所有的不确定因素以及外部扰动都视为系统扰动,基于观测器的函数估计主动对扰动进行实时补偿,从而使得该非线性系统的输出与输入线性化,降低了对于LATM精确数学模型的要求,可以为50Hz、峰峰值为20 °的三角波参考信号提供精确的跟踪控制;文献[101]针对周期性扫描运动的控制,提出了基于H∞ 最优控制理论的重复控制方法,为LATM提供了更加稳定、精确的高频位置跟踪控制。
由于LATM能够在工作区间内输出与转速和转角无关而仅与电流成正比的恒定力矩,因而被广泛应用于位置随动系统中有限转角内的扫描、定位和开关运动,使得其又被称为“摆动电机”。
扫描型相机的焦面只需单片电荷耦合器件(Charge Coupled Device, CCD),其通过加装摆镜以实现扫描成像,具有较低的研制难度和成本以及提供大视场和高分辨率的能力,因而成为各成像系统的研究热点。出于对高分辨率的追求,扫描成像在窄视场内的工作方式使得其不能采用传统的连续圆周扫描方式,而只能采用有限转角方式。根据其工作原理,成像质量取决于对摆镜运动的精确控制,具体为要求扫描系统在扫描线性段内具有高精度以满足高线性度,在非线性段内响应速度快以满足高效率。扫描运动控制通常采用位置伺服控制的方法将扫描运动转换为周期性的角位置信号来实现,根据运动规律,控制电机的工作模式分为慢速正程扫描和快速回扫两个过程[105]。LATM本身优异的力矩特性保证了慢速正程扫描的高线性度,高力矩转动惯量比则保证了快速回归的高效率,且其相较于步进电机不存在低速抖动的现象及失步的可能性,因此LATM成为了扫描控制系统中控制电机的最佳选择,目前已广泛应用于遥感系统、超声波成像、激光成像等领域[20, 27, 33, 40, 62, 92, 101, 105-108]。文献[40]介绍了应用于印度INSAT-2卫星中高分辨率辐射计双向扫描成像系统中的两款LATM,用于慢速扫描镜的最大输出力矩为200 mN·m、CTR为100 °,用于快速扫描镜最大输出力矩为350 mN·m、CTR为30 °。在扫描成像系统中,表现在成像失真度上的线性精度和成像清晰度上的重复精度是检验LATM质量的标准,也体现了LATM用于高精度伺服控制的能力[3]。
LATM仅与电流成正比的输出力矩特性使得其适用于做持续的定位控制,加上电动作动器在能效、质量、体积、成本、可靠性及控制等方面的优势,由LATM直驱的电动作动器取代传统的液动、气动作动器已成为趋势。由于体积合适,LATM作为旋转直驱伺服阀(Rotate Direct Drive Valve,RDDV)的伺服电动机得到广泛应用:实现空调系统以及废气循环系统空气流量的自动控制[9, 68-69, 78];实现内燃机的可变气门正时(Variable Valve Timing, VVT),以显著提升经济性[12-14,95,109-111],文献[110]提出了一种由LATM、谐振弹簧-阀门系统以及将电机旋转运动转换为直线运动的开槽凸轮构成的电磁阀驱动系统(Electromagnetic Valve Drive system, EMVD),电磁阀驱动系统装置如图20所示,该装置实现了燃气轮机的电子调速以适应负载变化[15, 17, 112]。除了能够实现线控驱动外,直驱的电液伺服阀还具有抗污染能力强的特点[74, 113-115]。
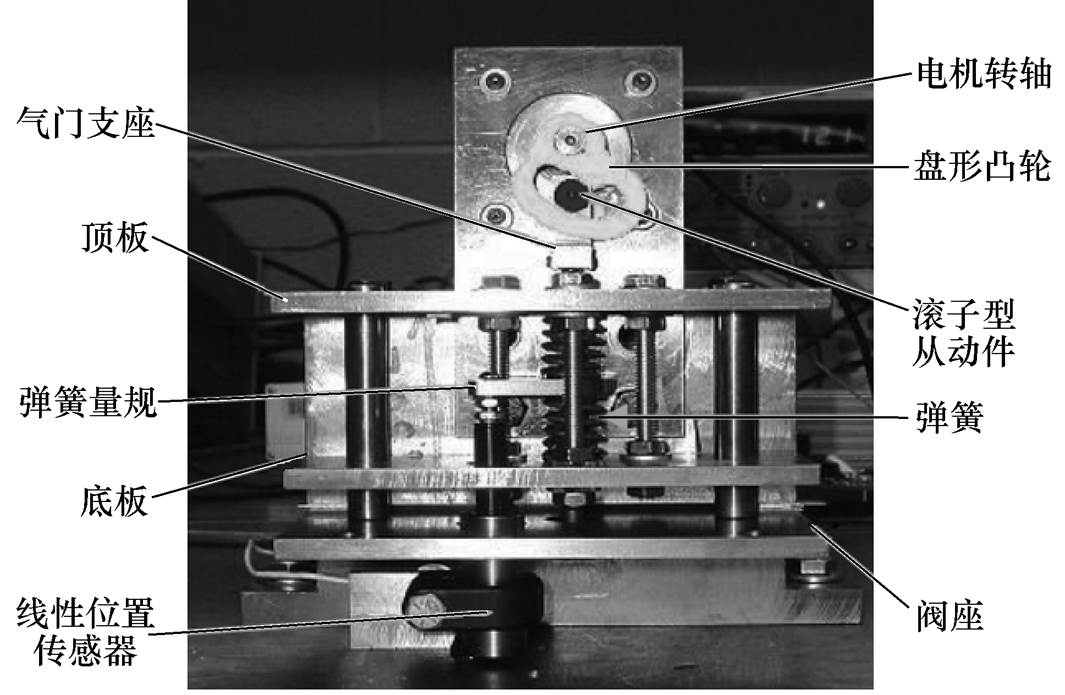
图20 电磁阀驱动系统装置[110]
Fig.20 EMVD apparatus[110]
在航空航天领域,由于LATM直驱的电动作动机构具有结构简单、维护方便、可靠性高、质量轻及惯量低等特点,将其应用于多电飞机、无人机、导弹及卫星等先进飞行器中已成为该领域的重要研究课题之一。舵机系统作为飞行自动控制系统中必不可少的组成部分,其仅在有限的转角内进行工作,文献[11, 23, 116]中将LATM用于直接控制舵面的舵机系统研究,表明其能有效及可靠地调整飞行器的飞行高度;在卫星运动的过程中需要持续在有限转角内调整天线的指向以确保通信的质量,文献[22, 87]研究了将零齿槽转矩的环形铁心无齿槽式LATM用于天线定向的驱动装置,实现了天线位置的连续高精度定向控制;文献[117]还研究了一种采用低惯量动圈式无齿槽式LATM的力矩测量系统,用于测量控制卫星姿态的反作用飞轮的输出力矩以实现对其的精确控制。
除了上述有关扫描摆动以及定位功能的应用外,文献[24, 118]利用储能电容作为电源将LATM用于高压断路器分合闸的智能控制,并通过实验测得动触头的行程曲线验证了LATM作动器的可行性,体现了LATM用于开关控制的能力;当铁磁材料处于线性区时,匀速下反电动势有与CTR相同大小的恒电动势区间,且该区间内反电动势大小与角速度呈线性关系,从而文献[29,119]将环形铁心齿槽式结构用作扫描控制系统中的测速元件即有限转角测速发电机,与LATM相比,有限转角测速发电机的绕组匝数更多、线径更小。此外,有限转角测速发电机在连续旋转时还能用作脉冲发电机以获得正负半周近似矩形的电压。
由前述可见,LATM作为一种提供特殊运动方式的电机,根据不同的应用需求已经发展出了各种各样的拓扑结构,而科技发展将对LATM提出更多、更高的要求。目前,LATM的研究热点与未来发展方向如下。
在一些追求高可靠性的场合,如航空航天领域,对LATM提出了冗余结构的要求,即希望电机具备两套及以上能力相同又具有热隔离和磁隔离的绕组。文献[120-121]分别采用了在相同槽内嵌放多套绕组,或者间隔槽嵌放多套绕组的方式以实现多余度,然而这些方法降低了单套绕组工作的输出能力且绕组之间的耦合较强;文献[46]采用两台环形铁心无齿槽式LATM轴向布置的方法以实现冗余结构,然而该方法不适用于绕组端部较长齿槽式LATM。除了多余度的要求,在机器人关节、光机扫描系统等领域还对LATM提出了多自由度的要求,文献[122]将VCM与LATM组合,研制了具有轴向与周向两自由度的电机并应用于机器人关节控制。因此,研究新的拓扑结构以拓展LATM的功能及应用是其发展方向。
在现有拓扑的基础上,如何进一步拓宽CTR以及提高电机的输出力矩是LATM不变的研究热点。如在前述阀门控制的应用中,有时对电机回到机械零位时阀门的位置有不同的要求。此时,如果设计的LATM的CTR仅能满足阀门的工作区间,就必须通过调整电机的安装位置来实现不同阀门的需求,这种做法繁琐且精度低。而如果能在保持输出能力的情况下拓宽CTR,则仅需通过调整回中装置的零位就可实现阀门零位的调整。另外,在一定的CTR下,更大的力矩输出能力通常也意味着更小的体积及质量或者更强的故障切除能力,这对航空航天等应用领域具有极其重要的意义。通过第2节对现有文献的总结可以发现,研究采用具有高饱和点的铁磁材料、进一步研究分析LATM的电磁机理并在此基础上优化定转子的结构是未来的研究方向。
损耗不仅会影响电机的运行状态,针对不同应用的损耗分析还会影响电机的设计与选择。工作于定位状态的LATM,其损耗来自绕组通直流电的焦耳损耗,而当电机跟随位置指令变换位置或直接做高频周期性摆动时,铁心损耗便不可忽略。LATM铁心损耗的计算有其特殊性,以动永磁体式结构为例,定子铁心同时受脉振的电枢磁场和摆动的转子主极磁场作用,与连续旋转电机有所区别。目前,有关特定运行状态下LATM损耗计算的研究较少,文献[58]研究了位置跟随信号为正弦信号时等极槽式LATM的铁耗计算,其根据第3节的电机数学模型及PID控制策略搭建了位置跟随特性分析模型用以获取工作电流,进而利用有限元计算铁耗,得到该运行状态下LATM的铁耗与电机的摆动频率、摆动幅度均呈二次函数关系。LATM的运行状态决定了电机损耗,而损耗产生的热效应导致电机参数的变化又反过来影响电机的运行状态。因此,LATM的损耗计算以及多物理场耦合分析是未来的研究方向。
由于LATM特殊的工作方式,需要有针对性地研究新的测试方法并且提高测量精度。如LATM矩角特性的测试,传统的测量方法是利用在输出轴工装上悬挂砝码以得到不同电流和转角下的输出力矩,该方法受限于砝码固定的质量,难以获得某一固定电流下的矩角特性,因而多用于理想情况下力矩系数的测定,且该方法需要人为反复观察转角位置,耗时长且精度难以保证[113]。而采用转矩传感器测试则通常需要专门针对LATM设计测试平台,且传感器本身昂贵、经济性较差。因此,研究专门的测试装置及技术以更精确地获得LATM的力矩常数、矩角特性、调节特性等电机参数特性,以及电机工作时的角速度、角加速度等变量,从而指导改善电机的设计是LATM实际应用中的研究重点。
本文对LATM进行了系统的介绍,从其原理和特性出发,根据现有文献的研究成果较为全面地阐述了LATM的拓扑结构、设计方法、性能优化手段、数学模型、控制方法、应用领域与未来发展方向。总体而言,LATM多变的拓扑结构、优异的矩角特性及简单的数学模型使其作为有限转角内的电动作动器具有巨大优势。目前,根据不同的应用领域,国内外已有企业形成了LATM的系列化产品,如美国的Aeroflex公司、通用扫描公司等,研究新型拓扑结构以扩展应用领域也是LATM目前的研究热点。由于LATM的矩角特性亦存在非线性问题,因而其矩角特性的进一步优化、多物理场耦合分析及测试技术的研制是未来的发展方向。随着研究人员对电机性能的进一步探索,LATM将有更为广阔的应用前景。
参考文献
[1] 桂竞存. 有限转角无刷直流力矩电机[J]. 电工电能新技术, 1984, 3(3): 45-49.
Gui Jingcun. Limited angle brushless DC torque motor[J]. Advanced Technology of Electrical Engin- eering and Energy, 1984, 3(3): 45-49.
[2] 徐加甫. 有限转角力矩电动机[J]. 自动化仪表, 1982, 3(4): 27-29, 62.
Xu Jiafu. Finite angle torque motor[J]. Process Auto- mation Instrumentation, 1982, 3(4): 27-29, 62.
[3] 谢果良, 杨媛霞, 张吟蓉. 高性能有限转角电动机发展概况[J]. 微电机, 1988, 21(1): 24-28.
Xie Guoliang, Yang Yuanxia, Zhang Yinrong. Develop- ment survey of high performance finite angle motor[J]. Mcromotors Servo Technique, 1988, 21(1): 24-28.
[4] Dawson C, Bolton H R. Performance prediction of a wide-angle limited-motion rotary actuator[J]. Pro- ceedings of the Institution of Electrical Engineers, 1978, 125(9): 895-898.
[5] Huber J E, Fleck N A, Ashby M F. The selection of mechanical actuators based on performance indices[J]. Proceedings of the Royal Society of London Series A: Mathematical, Physical and Engineering Sciences, 1997, 453(1965): 2185-2205.
[6] Bolton H R, Shakweh Y. Performance prediction of laws's relay actuator[J]. IEE Proceedings B Electric Power Applications, 1990, 137(1): 1-13.
[7] 徐殿国, 白凤强, 张相军, 等. 形状记忆合金执行器研究综述[J]. 电工技术学报, 2022, 37(20): 5144-5163.
Xu Dianguo, Bai Fengqiang, Zhang Xiangjun, et al. A review of the research on shape memory alloy actuators[J]. Transactions of China Electrotechnical Society, 2022, 37(20): 5144-5163.
[8] Bolton H R. Design aspects of electromagnetic actuators[C]//IEE Colloquium on Magnetic Materials for Sensors and Actuators (Digest No. 1994/183), London, UK, 2002: 6/1-6/5.
[9] Ahmed F S. Analysis, modeling, identification and control of pancake DC torque motors: application to automobile air path actuators[J]. Mechatronics, 2012, 22(2): 195-212.
[10] Chen S L, Kamaldin N, Teo T J, et al. Towards comprehensive modeling and large angle tracking control of a limited angle torque actuator with cylindrical Halbach[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(1): 431-442.
[11] Yu Guodong, Xu Yongxiang, Zou Jibin, et al. Modeling and analysis of limited-angle torque motor considering nonlinear effects[J]. IEEE Transactions on Transportation Electrification, 2020, 6(4): 1457-1465.
[12] 宋恩哲, 姚崇, 孙军, 等. 有限转角直流力矩电机作为柴油机调速执行机构的控制策略研究[J]. 内燃机工程, 2009, 30(1): 45-50.
Song Enzhe, Yao Chong, Sun Jun, et al. Design and research of LABLTM's controlling strategy for diesel engine speed actuator[J]. Chinese Internal Com- bustion Engine Engineering, 2009, 30(1): 45-50.
[13] Qiu Yihui, Perreault D J, Kassakian J G, et al. A custom-designed limited-angle actuator for an electro- mechanical engine valve drive part I: conceptual design[C]//5th IET International Conference on Power Electronics, Machines and Drives (PEMD 2010), Brighton, UK, 2010: 1-6.
[14] Qiu Yihui, Perreault D J, Kassakian J G, et al. A custom-designed limited-angle actuator for an elec- tromechanical engine valve drive part Ⅱ: fabrication and evaluation[C]//5th IET International Conference on Power Electronics, Machines and Drives (PEMD 2010), Brighton, UK, 2010: 1-6.
[15] Farhad T, Hosein F, Mojtaba A. Gray-box modeling of a pneumatic servo-valve[J]. Acta Polytechnica Hungarica, 2010, 7(5): 129-142.
[16] Jang G H, Seo S W, Kim C W, et al. Self-aligning limited-angle rotary torque PM motor for control valve: design and experimental verification[J]. IEEE Transactions on Applied Superconductivity, 2020, 30(4): 1-5.
[17] Tsai C C, Lin S C, Huang H C, et al. Design and control of a brushless DC limited-angle torque motor with its application to fuel control of small-scale gas turbine engines[J]. Mechatronics, 2009, 19(1): 29-41.
[18] 何松波, 顾鸿祥. 自屏蔽式音圈电机[J]. 计算机研究与发展, 1984, 21(4): 27-34, 17.
He Songbo, Gu Hongxiang. Self-shielding voice coil motor[J]. Journal of Computer Research and Develop- ment, 1984, 21(4): 27-34, 17.
[19] 柴嘉伟, 贵献国. 音圈电机结构优化及应用综述[J]. 电工技术学报, 2021, 36(6): 1113-1125.
Chai Jiawei, Gui Xianguo. Overview of structure optimization and application of voice coil motor[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1113-1125.
[20] 尹达一. 有限转角驱动机构在国外航天遥感系统中的应用[J]. 红外, 2003, 24(5): 5-10.
Yin Dayi. Application of finite angle driving mechanism to foreign space remote sensing systems[J]. Infrared, 2003, 24(5): 5-10.
[21] 李勇, 王亮, 张波, 等. 航空用盘式绕组旋转式音圈电机的热应力与热变形分析[J]. 电工技术学报, 2015, 30(12): 181-185.
Li Yong, Wang Liang, Zhang Bo, et al. Analysis of thermal stress and deformation of disk winding rotary voice coil motor used in space[J]. Transactions of China Electrotechnical Society, 2015, 30(12): 181-185.
[22] 褚立新, 林辉. 基于积分反推原理的天线定向伺服技术研究[J]. 中国空间科学技术, 2008, 28(1): 54-59.
Chu Lixin, Lin Hui. Study of antenna pointing servo system based on integral back-stepping scheme[J]. Chinese Space Science and Technology, 2008, 28(1): 54-59.
[23] 骆光照, 王鹏, 吴梅, 等. 直接驱动电动舵机的混合H2/H∞ 控制器设计[J]. 西北工业大学学报, 2004, 22(5): 649-652.
Luo Guangzhao, Wang Peng, Wu Mei, et al. Mixed H2/H∞ control of direct-drive electromechanical actuator (EMA)[J]. Journal of Northwestern Poly- technical University, 2004, 22(5): 649-652.
[24] 林莘, 李永祥, 马跃乾, 等. 高压断路器新型电机操动机构的动态特性分析[J]. 电机与控制学报, 2009, 13(2): 216-221, 226.
Lin Xin, Li Yongxiang, Ma Yueqian, et al. Dynamic characteristics analysis on novel motor actuator of high voltage circuit breaker[J]. Electric Machines and Control, 2009, 13(2): 216-221, 226.
[25] 王强, 王喜太, 张晓玉. 基于微电机的下肢康复训练系统的研究与开发[J]. 微电机, 2010, 43(1): 18-20.
Wang Qiang, Wang Xitai, Zhang Xiaoyu. Research and development of rehabilitative exercises systems of lower limbs based on micro-motor[J]. Micromotors, 2010, 43(1): 18-20.
[26] 陈益广, 刘均喜. 磁阻反应式有限转角电机特性分析[J]. 电工技术学报, 2017, 32(5): 19-25.
Chen Yiguang, Liu Junxi. The characteristic analysis of limited angle reluctance motor[J]. Transactions of China Electrotechnical Society, 2017, 32(5): 19-25.
[27] 郭志强, 余红英, 刘琛. 基于模糊PID的高速振镜电机控制[J]. 微特电机, 2019, 47(4): 61-65.
Guo Zhiqiang, Yu Hongying, Liu Chen. High-speed galvanometer motor control based on fuzzy PID[J]. Small & Special Electrical Machines, 2019, 47(4): 61-65.
[28] Zhang Y, Smith I R, Kettleborough J G. Performance evaluation for a limited-angle torque motor[J]. IEEE/ ASME Transactions on Mechatronics, 1999, 4(3): 335-339.
[29] 何松波. 有限转角电机[J]. 微特电机, 1976, 4(3): 16-31.
He Songbo. Finite angle motor[J]. Small & Special Machines, 1976, 4(3): 16-31.
[30] 禹国栋. 集中绕组有限转角力矩电机及其特性的研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.
[31] Dawson C, Bolton H R. Limited motion rotary actuators of the toroidal-stator, permanent-magnet rotor type[J]. IEE Proceedings B Electric Power Applications, 1982, 129(4): 190-198.
[32] 刘华源, 王自强, 杨帆. 一种有限转角力矩电机的设计方法[J]. 微电机, 2013, 46(1): 17-20, 66.
Liu Huayuan, Wang Ziqiang, Yang Fan. A limited angle torque motor design[J]. Micromotors, 2013, 46(1): 17-20, 66.
[33] Yu Zheyan, Wang Ziqiang. Analysis and simulation of a limited-angle torque motor[J]. Applied Mechanics and Materials, 2014, 668/669: 601-606.
[34] 刘杰, 赵友坤, 范雪蕾, 等. 一种定子双励磁有限转角力矩电机设计[J]. 微电机, 2019, 52(8): 20-22.
Liu Jie, Zhao Youkun, Fan Xuelei, et al. The invention relates to a stator double excitation torque motor with limited turning angle[J]. Micromotors, 2019, 52(8): 20-22.
[35] 姜保军, 周鹏飞. 一种永磁有限转角电机的磁场分析[J]. 重庆交通大学学报(自然科学版), 2020, 39(8): 119-124.
Jiang Baojun, Zhou Pengfei. Magnetic field analysis of a permanent magnet limited angle motor[J]. Journal of Chongqing Jiaotong University (Natural Science), 2020, 39(8): 119-124.
[36] Cheng Ming, Hua Wei, Zhang Jianzhong, et al. Overview of stator-permanent magnet brushless machines[J]. IEEE Transactions on Industrial Elec- tronics, 2011, 58(11): 5087-5101.
[37] Evans S A, Smith I R, Kettleborough J G. Static and dynamic analysis of a permanent magnet rectilinear Laws' relay actuator[J]. IEE Proceedings-Electric Power Applications, 1999, 146(1): 11-16.
[38] Evans S A, Smith I R, Kettleborough J G. Permanent- magnet linear actuator for static and reciprocating short-stroke electromechanical systems[J]. IEEE/ASME Transactions on Mechatronics, 2001, 6(1): 36-42.
[39] 桂竞存. 稀土永磁有限转角力矩电机的设计计算[J]. 微电机, 1986, 19(1): 14-18.
Gui Jingcun. Design and calculation of rare earth permanent magnet finite angle torque motor[J]. Mcromotors Servo Technique, 1986, 19(1): 14-18.
[40] Murali Krishna P, Kannan N. Brushless DC limited angle torque motor[C]//Proceedings of International Conference on Power Electronics, Drives and Energy Systems for Industrial Growth, New Delhi, India, 2002: 511-516.
[41] Zarandi R N, Kelk H M, Toorani F, et al. Com- prehensive design of a toroidally-wound limited angle torque motor[J]. International Review of Electrical Engineering, 2011, 6(1): 198-206.
[42] Roohnavazfar M, Houshmand M, Nasiri-Zarandi R, et al. Using axiomatic design theory for selection of the optimum design solution and manufacturing process plans of a limited angle torque motor[J]. Journal of Manufacturing Science and Engineering, 2014, 136(5): 051009.
[43] Nasiri-Zarandi R, Mirsalim M, Cavagnino A. Analysis, optimization, and prototyping of a brushless DC limited-angle torque-motor with segmented rotor pole tip structure[J]. IEEE Transactions on Industrial Electronics, 2015, 62(8): 4985-4993.
[44] Wu Shuai, Zhao Xiangyu, Li Xiao, et al. Preliminary design and optimization of toroidally wound limited angle servo motor based on a generalized magnetic circuit model[J]. IEEE Transactions on Magnetics, 2016, 52(9): 1-9.
[45] Hekmati P, Yazdanpanah R, Mirsalim M, et al. Radial-flux permanent-magnet limited-angle torque motors[J]. IEEE Transactions on Industrial Elec- tronics, 2017, 64(3): 1884-1892.
[46] Wu Shuai, Zhao Xiangyu, Jiao Zongxia, et al. Multi-objective optimal design of a toroidally wound radial-flux halbach permanent magnet array limited angle torque motor[J]. IEEE Transactions on Indu- strial Electronics, 2017, 64(4): 2962-2971.
[47] Li Yong, Ma Pengcheng, Wang Qian, et al. Analysis, modeling, and verification of limited angle torque motors with irregular slot numbers for performance improvement[J]. IEEE Transactions on Energy Con- version, 2020, 35(2): 1004-1013.
[48] Yazdanpanah R. Analytical study, design and opti- mization of radial-flux PM limited-angle torque motors[J]. Scientia Iranica, 2020, 29(4): 1975-1982.
[49] Ma Pengcheng, Wang Qian, Li Yong, et al. Operational range extension method for limited-angle torque motors with irregular slot numbers[J]. IET Electric Power Applications, 2021, 15(5): 570-578.
[50] Ma Pengcheng, Wang Qian, Li Yong, et al. Research on torque ripple suppression of the slotted limited angle torque motor[J]. IEEE Transactions on Mag- netics, 2021, 57(2): 1-6.
[51] 王海燕, 张雪英, 王真, 等. 分数槽绕组有限转角电动机的设计及仿真[J]. 微特电机, 2009, 37(8): 9-11.
Wang Haiyan, Zhang Xueying, Wang Zhen, et al. Design and simulation of fractional slot winding in limited angle motor[J]. Small & Special Electrical Machines, 2009, 37(8): 9-11.
[52] Christian M. A new multipurpose servo valve for fast applications[C]//SAE Technical Paper Series, Detroit, Michigan, USA, 1994, 103: 1097-1103.
[53] Bianchi N, Bolognani S. Design techniques for reducing the cogging torque in surface-mounted PM motors[C]//Conference Record of the 2000 IEEE Industry Applications Conference. Thirty-Fifth IAS Annual Meeting and World Conference on Industrial Applications of Electrical Energy (Cat. No.00CH37129), Rome, Italy, 2002: 179-185.
[54] Yu Guodong, Zou Jibin, Xu Yongxiang, et al. Estimation of maximum angular operation range for permanent-magnet slotted limited-angle torque motor[J]. IEEE Transactions on Magnetics, 2015, 51(11): 1-5.
[55] Yu Guodong, Zou Jibin, Xu Yongxiang, et al. Torque performance improvement of a radial-flux slotted limited-angle torque motor by tapered tooth-tip[J]. IEEE Transactions on Applied Superconductivity, 2016, 26(7): 1-5.
[56] Yu Guodong, Xu Yongxiang, Zou Jibin, et al. Analysis and experimental validation of dynamic performance for slotted limited-angle torque motor[J]. IEEE Transactions on Magnetics, 2017, 53(11): 1-5.
[57] Yu Guodong, Xu Yongxiang, Zou Jibin, et al. Development of a radial-flux slotted limited-angle torque motor with asymmetrical teeth for torque performance improvement[J]. IEEE Transactions on Magnetics, 2019, 55(7): 1-5.
[58] 于浩. 等极槽有限转角电机力矩特性优化与热问题研究[D]. 哈尔滨: 哈尔滨工业大学, 2020.
[59] 禹国栋, 徐永向, 邹继斌, 等. 等极槽式有限转角力矩电机磁场解析计算与恒转矩区间分析[J]. 中国电机工程学报, 2021, 41(7): 2538-2546.
Yu Guodong, Xu Yongxiang, Zou Jibin, et al. Analytical calculation of magnetic field and constant torque range analysis of slotted limited-angle torque motor with identical pole-slot number[J]. Proceedings of the CSEE, 2021, 41(7): 2538-2546.
[60] Yu Guodong, Xu Yongxiang, Lin Tianyu, et al. Nonlinear EMC modeling and analysis of permanent- magnet slotted limited-angle torque motor[J]. IEEE Transactions on Industrial Electronics, 2021, 68(9): 8507-8518.
[61] Yu Hao, Yu Guodong, Xu Yongxiang, et al. Torque performance improvement for slotted limited-angle torque motors by combined SMA application and GA optimization[J]. IEEE Transactions on Magnetics, 2021, 57(2): 1-5.
[62] Zou Jibin, Yu Guodong, Xu Yongxiang, et al. Development of a limited-angle torque motor with a moving coil[J]. IEEE Transactions on Magnetics, 2016, 52(7): 1-5.
[63] Smith K J, Graham D J, Neasham J A. Design and optimization of a voice coil motor with a rotary actuator for an ultrasound scanner[J]. IEEE Transactions on Industrial Electronics, 2015, 62(11): 7073- 7078.
[64] Choi Y M, Ahn D H, Gweon D G, et al. Halbach magnetic circuit for voice coil motor in hard disk drives[J]. Journal of Magnetics, 2010, 15(3): 143-147.
[65] Xu Zhaoping, Chang Siqin. Improved moving coil electric machine for internal combustion linear gen- erator[J]. IEEE Transactions on Energy Conversion, 2010, 25(2): 281-286.
[66] Hiemstra D B, Parmar G, Awtar S. Performance tradeoffs posed by moving magnet actuators in flexure-based nanopositioning[J]. IEEE/ASME Transa- ctions on Mechatronics, 2014, 19(1): 201-212.
[67] Wu Shuai, Jiao Zongxia, Yan Liang, et al. Develop- ment of a direct-drive servo valve with high- frequency voice coil motor and advanced digital controller[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(3): 932-942.
[68] McCann R A, Suriano J R. Optimized design and 3D finite element analysis of a rotary actuator[C]//IAS '95. Conference Record of the 1995 IEEE Industry Applications Conference Thirtieth IAS Annual Meeting, Orlando, FL, USA, 2002: 492-497.
[69] Ahmed F S, Laghrouche S, Bagdouri M E. Pancake type DC limited angle torque motor: modeling and identification, application to automobile air path actuators[J]. IFAC Proceedings Volumes, 2010, 43(7): 431-436.
[70] Lee E C, Kwon S O, Lee H Y, et al. Effects of rotor pole angle on torque characteristics of a limited-angle torque motor[C]//2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 2017: 1-6.
[71] Hekmati P, Mirsalim M. Design and analysis of a novel axial-flux slotless limited-angle torque motor with trapezoidal cross section for the stator[J]. IEEE Transactions on Energy Conversion, 2013, 28(4): 815-822.
[72] 马瑞卿, 刘景林, 刘卫国. 具有磁阻效应的永磁式有限转角无刷力矩电动机[J]. 微特电机, 2005, 33(7): 5-8.
Ma Ruiqing, Liu Jinglin, Liu Weiguo. Permanent magnet limited angle brushless torque motor based on reluctance effect[J]. Small & Special Machines, 2005, 33(7): 5-8.
[73] 樊战亭, 刘卫国, 贺安超. 有限转角力矩电动机转矩分析和优化[J]. 微特电机, 2012, 40(2): 1-3.
Fan Zhanting, Liu Weiguo, He Anchao. Limited angle torque motor torque analysis and optimization[J]. Small & Special Electrical Machines, 2012, 40(2): 1-3.
[74] Li Xiao, Wu Shuai, Jiao Zongxia, et al. Design and analysis of a Limited angle torque motor with dual Halbach arrays[C]//2015 IEEE International Confer- ence on Advanced Intelligent Mechatronics (AIM), Busan, Korea (South), 2015: 401-406.
[75] Dawson C, Bolton H R. Design of a class of wide- angle limited-rotation rotary actuators[J]. Proceedings of the Institution of Electrical Engineers, 1979, 126(4): 345-350.
[76] 张守首, 郭思源. 基于子域分析模型的实心转子感应电机磁场解析[J]. 电工技术学报, 2021, 36(20): 4285-4296.
Zhang Shoushou, Guo Siyuan. Analytical solution of magnetic field in solid rotor induction machine based on subdomain model[J]. Transactions of China Electrotechnical Society, 2021, 36(20): 4285-4296.
[77] 赵士豪, 陈进华, 张驰, 等. 不均匀气隙表贴式永磁同步电机磁场解析计算[J]. 电工技术学报, 2022, 37(14): 3502-3513.
Zhao Shihao, Chen Jinhua, Zhang Chi, et al. Analytical calculation of magnetic field of permanent magnet synchronous motor with uneven air gap structure[J]. Transactions of China Electrotechnical Society, 2022, 37(14): 3502-3513.
[78] Gutfrind C, Dufour L, Liebart V, et al. An approach to the prototyping of an optimized limited stroke actuator to drive a low pressure exhaust gas recir- culation valve[J]. Sensors, 2016, 16(5): 735.
[79] 孙毅, 蔡顺, 林迎前, 等. 永磁辅助同步磁阻电机顶层优化设计(英文)[J]. 电工技术学报, 2022, 37(9): 2306-2318.
Sun Yi, Cai Shun, Lin Yingqian, et al. Top-level design pattern of pm-assisted synchronous reluctance machines[J]. Transactions of China Electrotechnical Society, 2022, 37(9): 2306-2318.
[80] Bramerdorfer G. Multiobjective electric machine optimization for highest reliability demands[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(2): 71-78.
[81] 张文晶, 徐衍亮, 李树才. 新型盘式横向磁通永磁无刷电机的结构原理及设计优化[J]. 电工技术学报, 2021, 36(14): 2979-2988.
Zhang Wenjing, Xu Yanliang, Li Shucai. Structure principle and optimization of a novel disk transverse flux permanent magnet brushless motor[J]. Transa- ctions of China Electrotechnical Society, 2021, 36(14): 2979-2988.
[82] Widdowson G P, Howe D, Evison P R. Computer- aided optimization of rare-earth permanent magnet actuators[C]//International Conference on Computa- tion in Electromagnetics, London, UK, 1991: 93-96.
[83] Roohnavazfar M, Houshmand M, Zarandi R N, et al. Optimization of design parameters of a limited angle torque motor using analytical hierarchy process and axiomatic design theory[J]. Production & Manu- facturing Research, 2014, 2(1): 400-414.
[84] 胡小飞, 刘超, 王毅, 等. 单相无刷有槽有限转角电机的分析与优化[J]. 电工技术学报, 2019, 34(13): 2744-2751.
Hu Xiaofei, Liu Chao, Wang Yi, et al. Analysis and optimization of single phase brushless slotted limited angle torque motor[J]. Transactions of China Elec- trotechnical Society, 2019, 34(13): 2744-2751.
[85] 郭立志, 郑楚良, 王和. 半浸油式有限转角力矩电机的设计与仿真[J]. 微特电机, 2021, 49(1): 22-25.
Guo Lizhi, Zheng Chuliang, Wang He. Design and simulation of semi-immersed limited angle torque motor[J]. Small & Special Electrical Machines, 2021, 49(1): 22-25.
[86] Ionică I, Modreanu M, Boboc C, et al. Tridimensional modeling for a DC, limited angle, torque motor of size 16[C]//2016 International Conference and Expo- sition on Electrical and Power Engineering (EPE), Iasi, Romania, 2016: 235-239.
[87] Krishnan S, Sreejith M R, Sajeev K A, et al. A comparative design approach of a novel wide angle torque motor for pointing mechanism for space application[C]//2018 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Chennai, India, 2019: 1-5.
[88] 刘有恩, 刘勇, 葛红岩, 等. 大角位移有限转角力矩电机辅助齿的设计与优化[J]. 现代机械, 2021(3): 47-52.
Liu Youen, Liu Yong, Ge Hongyan, et al. Design and optimization of auxiliary gear tooth for limited angle torque motor with large angular displacement[J]. Modern Machinery, 2021(3): 47-52.
[89] 曾子元, 刘有恩, 吴和远, 等. 一种双余度有限转角力矩电机的设计研究[J]. 现代机械, 2019(6): 17-21.
Zeng Ziyuan, Liu Youen, Wu Heyuan, et al. Design of a dual redundancy limited angle torque motor[J]. Modern Machinery, 2019(6): 17-21.
[90] 谢冰川, 张岳, 徐振耀, 等. 基于代理模型的电机多学科优化关键技术综述[J]. 电工技术学报, 2022, 37(20): 5117-5143.
Xie Bingchuan, Zhang Yue, Xu Zhenyao, et al. Review on multidisciplinary optimization key tech- nology of electrical machine based on surrogate models[J]. Transactions of China Electrotechnical Society, 2022, 37(20): 5117-5143.
[91] Lee J S, Choi G. Modeling and hardware-in-the-loop system realization of electric machine drives—a review[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(3): 194-201.
[92] Smith I R, Kettleborough J G, Zhang Y. Simplified modelling and dynamic analysis of a Laws’ relay actuator[J]. Mechatronics, 1999, 9(5): 463-475.
[93] Ahmed F S, Laghrouche S, El Bagdouri M. Overview of the modelling techniques of actuator non-linearities in the engine air path[J]. Proceedings of the Institu- tion of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2013, 227(3): 443-454.
[94] Qiao Yue, Zhao Tianyi, Gui Xianguo. Overview of position servo control technology and development of voice coil motor[J]. CES Transactions on Electrical Machines and Systems, 2022, 6(3): 269-278.
[95] 赵华伟. 有限转角力矩电机作为柴油机电子调速执行机构的设计与研究[D]. 哈尔滨: 哈尔滨工程大学, 2008.
[96] Jagadeeshwaran A, Padma S, Shankar S V, et al. Development of limited angle brushless torque motor control drive for scan mirror mechanism[J]. Inter- national Journal of Engineering and Technology, 2013, 5(5): 3907-3913.
[97] Precup R E, Balint A D, Radac M B, et al. Back- tracking search optimization algorithm-based approach to PID controller tuning for torque motor systems[C]// 2015 Annual IEEE Systems Conference (SysCon) Proceedings, Vancouver, BC, Canada, 2015: 127- 132.
[98] Chen Jianchi, Prempain E, Wu Qinghua. Observer- based nonlinear control of a torque motor with perturbation estimation[J]. International Journal of Automation and Computing, 2006, 3(1): 84-90.
[99] 许辉, 王自强. 基于神经网络的有限转角力矩电动机滑模控制[J]. 微特电机, 2015, 43(11): 39-42, 48.
Xu Hui, Wang Ziqiang. Sliding mode controller of limited angel torque motor based on neural network[J]. Small & Special Electrical Machines, 2015, 43(11): 39-42, 48.
[100] Zhang Y, Smith I R, Kettleborough J G. Accurate tracking control of a limited angle torque motor[J]. Electric Machines & Power Systems, 1999, 27(11): 1191-1199.
[101] Du Chunyang, Li Tiecai, Cao Zhengcai. Accurate tracking control of a limited angle torque motor[C]// 38th IAS Annual Meeting on Conference Record of the Industry Applications Conference, Salt Lake City, UT, USA, 2004: 744-748.
[102] 武志涛, 李帅, 程万胜. 基于扩展滑模扰动观测器的永磁直线同步电机定结构滑模位置跟踪控制[J]. 电工技术学报, 2022, 37(10): 2503-2512.
Wu Zhitao, Li Shuai, Cheng Wansheng. Fixed structure sliding mode position tracking control for permanent magnet linear synchronous motor based on extended sliding mode disturbance observer[J]. Transactions of China Electrotechnical Society, 2022, 37(10): 2503-2512.
[103] 韩国强, 陆哲, 吴孟霖, 等. 基于改进滑模控制策略的开关磁阻电机直接瞬时转矩控制方法[J]. 电工技术学报, 2022, 37(22): 5740-5755.
Han Guoqiang, Lu Zhe, Wu Menglin, et al. Direct instantaneous torque control method for switched reluctance motor based on an improved sliding mode control strategy[J]. Transactions of China Electro- technical Society, 2022, 37(22): 5740-5755.
[104] 魏惠芳, 王丽梅. 永磁直线同步电机自适应模糊神经网络时变滑模控制[J]. 电工技术学报, 2022, 37(4): 861-869.
Wei Huifang, Wang Limei. Adaptive fuzzy neural network time-varying sliding mode control for permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 861-869.
[105] 汤恩生, 原劲鹏. 基于锁相环的摆动扫描控制系统模型分析[J]. 中国空间科学技术, 2013, 33(6): 74-80.
Tang Ensheng, Yuan Jinpeng. Model analysis of PLL swing scanning control system[J]. Chinese Space Science and Technology, 2013, 33(6): 74-80.
[106] 王劲强. 星载相机扫描镜控制系统研究[D]. 长沙: 国防科学技术大学, 2004.
[107] 刘晓玮. 扫描型热像仪扫描控制技术研究[D]. 西安: 西安工业大学, 2013.
[108] 刘晓玮, 江婷婷, 李扬, 等. 基于DSP的光机扫描控制技术[J]. 兵工自动化, 2015, 34(2): 86-89.
Liu Xiaowei, Jiang Tingting, Li Yang, et al. Technique of scanning control based on DSP[J]. Ordnance Industry Automation, 2015, 34(2): 86-89.
[109] Scattolini R, Siviero C, Mazzucco M, et al. Modeling and identification of an electromechanical internal combustion engine throttle body[J]. Control Engin- eering Practice, 1997, 5(9): 1253-1259.
[110] Parlikar T A, Chang W S, Qiu Y H, et al. Design and experimental implementation of an electromagnetic engine valve drive[J]. IEEE/ASME Transactions on Mechatronics, 2005, 10(5): 482-494.
[111] Qiu Yihui, Perreault D J, Keim T A, et al. Nonlinear system modeling, optimal cam design, and advanced system control for an electromechanical engine valve drive[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(6): 1098-1110.
[112] 肖然, 周明, 郝守刚. 有限转角直流力矩电机位置伺服驱动器设计[J]. 微电机, 2008, 41(1): 37-39, 42.
Xiao Ran, Zhou Ming, Hao Shougang. Design of position servo driver for DC limited angle torque motor[J]. Micromotors Servo Technique, 2008, 41(1): 37-39, 42.
[113] 胡小飞, 王毅, 苏静静, 等. 旋转直驱伺服阀用有限转角电机的设计与研究[J]. 微特电机, 2021, 49(11): 25-29.
Hu Xiaofei, Wang Yi, Su Jingjing, et al. Design and research of a lmited-angle torque motor for the rotate direct drive valve[J]. Small & Special Electrical Machines, 2021, 49(11): 25-29.
[114] 付华军. 某新型RDDV伺服阀的设计与仿真分析[J]. 液压与气动, 2014(1): 45-48.
Fu Huajun. Design and simulation analysis of new RDDV servovalve[J]. Chinese Hydraulics & Pneu- matics, 2014(1): 45-48.
[115] Yu Jue, Zhuang Jian, Yu Dehong. Modeling and analysis of a rotary direct drive servovalve[J]. Chinese Journal of Mechanical Engineering, 2014, 27(5): 1064-1074.
[116] Zhang Xinhua, Wang Tianyi, Huang Jian, et al. Design of a novel limited angle toque motor with compound Halbach array for electric direct-drive servo system in aerospace vehicle[C]//2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 2019: 1-6.
[117] Zou Jibin, Yu Guodong, Xu Yongxiang, et al. Development of a slotless limited-angle torque motor for reaction wheels torque measurement system[J]. IEEE Transactions on Magnetics, 2014, 50(11): 1-4.
[118] 李永祥, 林莘, 徐建源. 高压断路器有限转角永磁电机操动机构两种定子结构[J]. 电工技术学报, 2010, 25(5): 61-68.
Li Yongxiang, Lin Xin, Xu Jianyuan. Two stator structures of limited angle permanent magnet motors for operating mechanism on high voltage circuit breaker[J]. Transactions of China Electrotechnical Society, 2010, 25(5): 61-68.
[119] 王筠. 有限转角测速发电机设计[J]. 微特电机, 2004, 32(2): 16-17.
Wang Yun. The design of the limited angle tacho- generator[J]. Small & Special Machines, 2004, 32(2): 16-17.
[120] 马瑞卿, 刘卫国, 罗兵. 双余度有限转角力矩电动机控制技术[J]. 微电机(伺服技术), 2000, 33(3): 24-26, 34.
Ma Ruiqing, Liu Weiguo, Luo Bing. Controlling of dual-redundancy limited angle torque motor[J]. Micro- motors (Servo Technique), 2000, 33(3): 24-26, 34.
[121] Zhou You, Li Dawei, Huang Lihao, et al. Design of a limited-angle torque motor with magnetic zero- returner for aviation fuel valve[C]//2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 2020: 654-660.
[122] Overboom T T, Jansen J W, Lomonova E A, et al. Design and optimization of a rotary actuator for a two- degree-of-freedom z f-module[J]. IEEE Transactions on Industry Applications, 2010, 46(6): 2401-2409.
Abstract A limited angle torque motor (LATM) can rotate around the axis within a certain angle without requiring additional mechanical devices. LATMs are often used as electrically powered actuators, which are applied to the direct drive control with a torque requirement of less than 1 kN·m within a limited angle. Compared with traditional hydraulic and pneumatic actuators, no piping or other transmission equipment is required. Compared with the traditional electrically powered actuator of the rotary motor with gearbox, LATM has no non-linearity problem caused by the transmission mechanism and has the advantages of simple structure, convenient control, high reliability, and high torque density. Therefore, LATMs are widely used in various application fields that require only a limited rotation angle.
There are many different structures of LATM and various ways to classify them. At the same time, there are similarities in the working principles of serval main topologies that have been used so far. In this paper, the working principles of each main topology are introduced by evolving the DC motor into these topologies, which leads to the relationship between output torque and rotor angle, the characteristic of most interest in applications of LATM. Then, various LATM topologies and their characteristics are presented in detail. Among these topologies, the toroidal slotless LATM and equi-polar slot LATM are the two most widely used topologies and research focuses.
The torque-angle characteristic of LATM has a constant torque range (CTR), where the output torque is proportional to the input current and independent of the speed and rotor position. Thus, it is the operating range of LATM. The magnitude of CTR and the maximum output torque in the range are the two most important static performance indicators of LATM. Since CTR is affected by the cogging torque, armature reaction, and nonlinearity of the ferromagnetic material, this paper presents the application of the equivalent magnetic circuit methods, the analytical methods, the finite element method, and the decision-making methods in LATM design. Moreover, this paper discusses how to suppress the torque ripple within CTR and how to further improve the magnitude of CTR and the maximum output torque in the range.
Mathematical models and control methods are indispensable to achieving precise control of LATM. The linear mathematical model can be analogous to that of a DC motor. However, accurate nonlinear mathematical models must rely on the finite element method or experimental data. Thus, robust control methods are better for obtaining the desired dynamic performance. This paper presents the application of PID and improved PID control methods in LATM control, and the application of various modern control methods considering the effects of load disturbances, motor parameter variations, and nonlinearity of the torque-angle characteristic.
According to the swing scanning and positioning functions of LATM, three typical application fields- imaging system, servo valve, and aircraft attitude-are detailed in this paper, and other applications are roughly introduced. With the development of science and technology, the study of new structures, optimization of the torque-angle characteristic, loss calculation, multi-physics field coupling analysis, and testing techniques will become the main development trend in LATM research. As researchers improve motor performance, LATM will have a broader application prospect.
keywords:Limited angle torque motor, topology, design method, torque-angle characteristic, mathematical model, control method
DOI: 10.19595/j.cnki.1000-6753.tces.221693
中图分类号:TM359.6
国家自然科学基金优秀青年科学基金项目(52122705)和国家自然科学基金重大项目(51991382)资助。
收稿日期 2022-09-06
改稿日期 2022-11-09
王铭杰 男,1998年生,硕士研究生,研究方向为永磁电机设计。E-mail: mingjiewang@hust.edu.cn
李大伟 男,1989年生,教授,博士生导师,研究方向为新型永磁电机、伺服电机和电动飞机用电机系统。E-mail: daweili@hust.edu.cn(通信作者)
(编辑 崔文静)