
图1 磁保持继电器有限元网格图
Fig.1 Finite element meshes of magnetic latching relay
摘要 触头弹跳引起的触点磨损和触点粘接等故障对继电器电寿命有重要影响。考虑磁保持继电器在簧片弹性形变和触头碰撞的相互作用下触头复杂的弹跳情况,将模型定义为刚体的处理方法不能还原柔性体簧片的实际运动状态。通过Ansys LS-DYNA,基于运动方程、材料本构方程和边界条件建立继电器动力学数学模型。通过Ansys Maxwell,基于麦克斯韦方程组建立继电器电磁学模型。通过Matlab交换不同物理场模型数据,实现相同时间域内两种模型多物理场的耦合计算和数据交互。通过与实验数据对比验证了仿真模型的准确性。在仿真基础上,探究静簧片弹性模量、铁心线圈电压和常闭静簧片预压力对触头弹跳的影响。证明了通过三维瞬态多物理场耦合仿真能够真实地还原继电器产品的工作状态,缩短产品的开发设计周期。
关键词:磁保持继电器 动态特性 Ansys LS-DYNA 触头弹跳
继电器作为一种电控开关器件,广泛应用在生产生活的各个领域,其性能影响用电设备的可靠性与稳定性。触头的接触情况对继电器的稳定性具有重要的影响[1],可能导致触点电气磨损和触点熔焊等故障[2]。继电器触头弹跳主要来自于触头碰撞和簧片振动。张高延等[3]根据梁弯曲理论得到簧片的振动特性,在产品设计中避免簧片发生共振。李亚峰等[4]提出了触头弹跳分段振动微分方程并通过仿真得到验证。Jiang Li等[5]通过粒子群优化算法和遗传算法相结合的方式得出继电器结构参数的最优解,以减少碰撞和降低成本。为了保证继电器的可靠动作,一些学者不改变继电器的结构参数,从电器控制的角度来抑制弹跳。吴敬轩等[6]基于无模型自适应控制方法,通过电器在线数据实时优化电磁机构控制策略来抑制弹跳。除此之外,随着计算机软件的不断发展,通过三维动态仿真技术研究继电器弹跳的影响因素可以有效地提升产品设计质量和效率,具有重要的实际应用价值。李兴文等[7]借助Ansys建立三维有限元电磁模型,通过插值查表获取各个时刻电磁吸力,再对ADAMS进行二次开发,实现电路、电磁场和机械运动方程的耦合求解[8-10]。林抒毅、何晓燕等[11-12]在电磁学模型的处理上采取同样的插值方式,针对动力学模型引入了基于连续介质力学有限元法的Ansys LS-DYNA分析触头弹跳。游颖敏等[13]使用Ansys LS-DYNA模拟动触头的碰撞过程。翟国富、杨文英等[14-15]分别在弹簧-振子模型和Kelvin-Voigt模型的基础上,结合模型运动方程和电磁机构有限元模型,通过Flux和ADAMS建立模型,研究触头的弹跳现象,付饶等[16]基于此方法模拟触点超程退化过程。Yu Hao等[17]利用有限元仿真软件对电磁系统和接触弹簧系统建模,研究电磁系统和弹簧系统关键参数的变化对电动势的影响,最终得出结构优化参数。Liu Lanxiang等[18]建立了基于刚体碰撞的继电器弹跳模型,计算了固定接触和运动接触之间的非线性接触力,并给出了不同参数下触头弹跳变化规律。苏秀苹、乔延华等[19-20]借助ADAMS分析了磁保持继电器的动态性能,并进行了优化设计。
簧片弹性形变和触头碰撞的相互作用,增大了触头运动状态的分析难度。准确地模拟簧片的运动状态是保证动态特性仿真结果具有可靠参考价值的重要前提。对于簧片式继电器的动态特性仿真,使用多体动力学软件将模型定义为刚体的动态特性仿真方法不能还原柔性体簧片的实际运动状态,无法准确得到触头弹跳情况,需要考虑簧片在发生弹性形变时的非线性变形。通过建立继电器刚柔耦合动力学模型能够保证动态特性仿真的准确性与可靠性。传统的模型刚柔耦合方法是借助Ansys有限元软件获取建立柔性体所需的模态中性文件MNF,通过将模态中性文件导入ADAMS的刚体模型中实现刚柔模型的耦合。除了材料属性外,柔性体的形变还会受到模态阶数和模态中性文件导出关键点的影响,其柔性体的计算精度还可以进一步提升。
本文在以上研究的基础上,采用有限元软件Ansys LS-DYNA建立动力学模型。通过Ansys LS-DYNA处理簧片的非线性变形,实现刚性体与柔性体的动力学分析。采用Ansys Maxwell求解继电器电磁模型,通过Matlab建立动力学模型和电磁学模型的数据交互通道,完成多物理场耦合继电器动态特性求解。利用示波器测试继电器电压电流波形,验证仿真模型的准确性。最后利用上述模型分析触头弹跳的影响因素,指导继电器产品设计,进一步提升产品设计效率。
磁保持继电器的优势在于:仅需要在继电器动作时提供电流,永磁体可维持继电器的稳定状态,能够避免持续通电线圈热能的积累,提升了继电器的工作效率和安全可靠性[21]。本文研究的磁保持继电器的三维有限元网格模型如图1所示,主要包括静簧片、动簧片、静触头、动触头、传动部件(滑动块、转动块)、衔铁、轭铁和铁心等部件。继电器线圈参数见表1。
图1 磁保持继电器有限元网格图
Fig.1 Finite element meshes of magnetic latching relay
表1 继电器线圈参数
Tab.1 Relay coil parameters

参数数值 线圈电压/V12 线圈匝数930 线圈电阻/Ω36
磁保持继电器电磁系统结构示意图如图2所示。稳定状态下,线圈中无电流,依靠永磁体磁场在衔铁和轭铁间产生电磁吸力,使衔铁稳定吸合。当线圈中通入产生相反方向磁场的电流时,永磁体磁场被电流反向磁场削弱,磁路中总磁场逐渐减小,直至线圈电流磁场强于永磁体磁场后,衔铁与轭铁间的电磁力由吸力状态转变为斥力状态,衔铁开始转动,与轭铁分离。当衔铁转动至水平位置时,电磁力对衔铁的作用也达到平衡,但在衔铁惯性的作用下,会继续向另一侧转动。超过水平位置后,永磁体磁场与线圈电流磁场同向,电磁力表现为吸力状态,促使衔铁加速转动,直至稳定吸合。最终撤去线圈电流,由永磁体磁场保持衔铁稳定吸合。
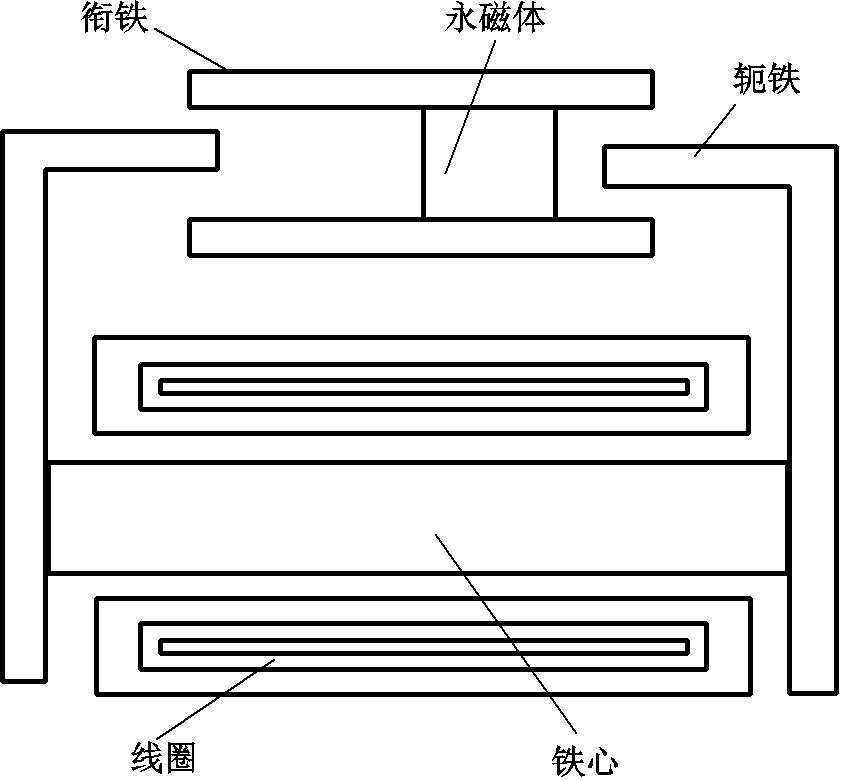
图2 磁保持继电器电磁系统结构示意图
Fig.2 Schematic diagram of electromagnetic system of magnetic latching relay
由于整体运动过程在毫秒级时间内发生,所以忽略模型中摩擦、接触及碰撞产生的热能。为了准确得到继电器接触碰撞引起的簧片形变和触头弹跳,采用运动方程、本构方程和边界条件对继电器运动组件的运动过程进行约束。
1.1.1 初始条件
取初始时刻的质点坐标为 。在任意t时刻,该质点坐标为
。在任意t时刻,该质点坐标为 ,其质点运动可表示为
,其质点运动可表示为
 (1)
(1)
在t=0时,初始条件为
 (2)
(2)
式中, 为质点速度;
为质点速度; 为初始速度;i、j代表三个坐标方向。
为初始速度;i、j代表三个坐标方向。
1.1.2 本构方程
由广义胡克定律表示,本构方程参数受触头、衔铁及传动部件的材料影响。
 (3)
(3)
式中, 为可动组件的材料应力;
为可动组件的材料应力; 为材料弹性常数;k、l为缩并计算的哑标;
为材料弹性常数;k、l为缩并计算的哑标; 为可动组件应变率。触头材料参数见表2。
为可动组件应变率。触头材料参数见表2。
表2 触头材料参数
Tab.2 Contact material parameters

触头材料密度/(kg·m-3)弹性模量/MPa泊松比 银氧化锡10.5×10377 0000.34
1.1.3 运动方程
一切物体的运动都需要满足质量守恒定律、动量守恒定律和能量守恒定律。以“三定律”构建继电器动力学模型的运动方程。
1)质量守恒方程
 (4)
(4)
式中, 为可动组件当前质量密度;
为可动组件当前质量密度; 为可动组件初始质量密度;
为可动组件初始质量密度; 为变形体变形前后的相对体积。
为变形体变形前后的相对体积。
2)动量方程
 (5)
(5)
式中, 为可动组件单位质量柯西应力;
为可动组件单位质量柯西应力; 为可动组件单位质量体积力;
为可动组件单位质量体积力; 为可动组件单位质量加速度。
为可动组件单位质量加速度。
3)能量方程
 (6)
(6)
式中, 为可动组件能量关于时间的微分;
为可动组件能量关于时间的微分; 为当下可动组件的体积;
为当下可动组件的体积; 为偏应力;p为压力;
为偏应力;p为压力; 为可动组件应变率张量;q为体积粘性阻力。、、及下文中相似表示方式指的是对应矩阵中第
为可动组件应变率张量;q为体积粘性阻力。、、及下文中相似表示方式指的是对应矩阵中第 行、第
行、第 列元素。
列元素。
1.1.4 边界条件
应力边界条件
 (7)
(7)
位移边界条件
 (8)
(8)
接触边界条件
 (9)
(9)
式中, 为面应力载荷;
为面应力载荷; 为边界外法向余弦;
为边界外法向余弦; 为给定的位移函数。
为给定的位移函数。
根据动力学问题有限元方法,离散化的结构动力方程为
 (10)
(10)
式中,M为结构质量矩阵;C为阻尼矩阵; 为节点的加速度向量;
为节点的加速度向量; 为载荷向量;
为载荷向量; 为内力向量;
为内力向量; 为沙漏阻力向量。由于采用了缩减积分,因此会引起沙漏效应。在动力响应计算中,沙漏模态将不受控制,导致计算结果的数值振荡。通过增加沙漏黏性阻力来解决沙漏问题。选取具有8节点的六面体单元,在各个节点沿
为沙漏阻力向量。由于采用了缩减积分,因此会引起沙漏效应。在动力响应计算中,沙漏模态将不受控制,导致计算结果的数值振荡。通过增加沙漏黏性阻力来解决沙漏问题。选取具有8节点的六面体单元,在各个节点沿 轴方向引入沙漏阻尼力
轴方向引入沙漏阻尼力 ,其表达式为
,其表达式为
 (11)
(11)
式中,k为六面体单元8个节点, ;
; 为沙漏模态;
为沙漏模态; 为沙漏模态的模。
为沙漏模态的模。
![]() (13)
(13)
式中, 为指定常数;
为指定常数; 为材料的声速;
为材料的声速; 为单元体积。
为单元体积。
对于上述离散化动力方程,采用显式的中心差分方法求解,其递推格式为
 (14)
(14)
其中
式中, 为
为 时刻的节点加速度向量;
时刻的节点加速度向量; 为
为 时刻的速度向量;
时刻的速度向量; 为
为 时刻的节点位置坐标向量。
时刻的节点位置坐标向量。
Ansys LS-DYNA推荐阻尼系数 计算公式为
计算公式为
 (15)
(15)
式中, 为结构固有频率。
为结构固有频率。
对弹性形变的静簧片进行模态分析,求取其前六阶模态固有频率,见表3。根据模态分析结果和结构实际振动结果对比,选取其最低阶固有频率。
表3 静簧片前六阶模态固有频率
Tab.3 The first six modes natural frequencies of the stator reed
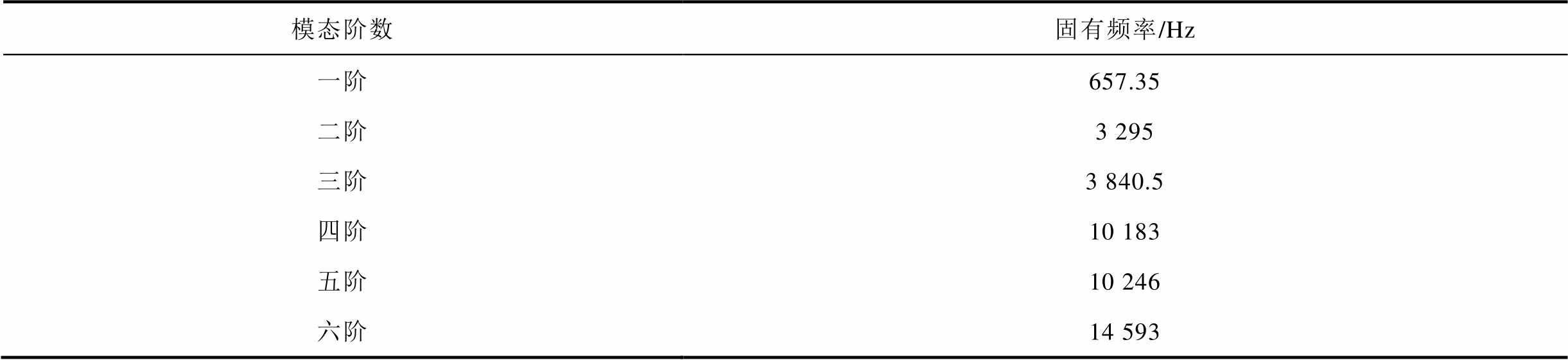
模态阶数固有频率/Hz 一阶657.35 二阶3 295 三阶3 840.5 四阶10 183 五阶10 246 六阶14 593
继电器触头是两个弧形面相接触,其接触形式可看作点接触。采用对称罚函数法计算接触力。首先在有可能产生接触的部件之间定义主从接触。在进行每一步长的计算时,检查每个从节点是否穿过主界面,没有出现穿透的从节点不做处理;出现穿透的从节点和主界面之间引入接触力。该接触力的大小与穿透深度、主界面刚度成正比。其物理意义是在从节点和主界面之间等效一个法向弹簧,以限制穿透。以此类推,再检查每个主节点对从界面的穿透情况,计算接触力,其表达式为
 (16)
(16)
式中, 为穿透深度;
为穿透深度; 为接触点处单元外向法线单位矢量;
为接触点处单元外向法线单位矢量; 为接触单元的刚度因子
为接触单元的刚度因子 ,
, 、
、 、
、 分别为接触单元的体积模量、体积和面积,为罚因子,程序默认值为0.1,仿真中并未发现较大穿透量,因此保持默认罚因子值。设时刻摩擦力为
分别为接触单元的体积模量、体积和面积,为罚因子,程序默认值为0.1,仿真中并未发现较大穿透量,因此保持默认罚因子值。设时刻摩擦力为 ,则时刻可能产生的摩擦力
,则时刻可能产生的摩擦力![]() 为
为
 (17)
(17)
式中, 为界面刚度;
为界面刚度; 为节点位移增量。时刻的摩擦力计算公式为
为节点位移增量。时刻的摩擦力计算公式为
 (18)
(18)
式中, 为最大摩擦力,
为最大摩擦力, ,
, 为摩擦系数。根据企业提供的技术参数,触头摩擦系数取值0.1。
为摩擦系数。根据企业提供的技术参数,触头摩擦系数取值0.1。
应用显式计算方法可无需计算迭代,为了保持数值稳定性,采用变步长积分法,每一时刻的积分步长取决于网格中最小单元的尺寸,提高了计算效率。
三维瞬态电磁模型是在边界条件和初始条件的约束下,依托麦克斯韦方程产生。
1)电压平衡方程
 (19)
(19)
式中, 为励磁电压;R为线圈电阻;i为电流;
为励磁电压;R为线圈电阻;i为电流; 为磁链;
为磁链; 为电感。
为电感。
当衔铁在电磁转矩的作用下发生转动后,电压平衡方程可改写为
 (20)
(20)
式中, 为运动反电动势;
为运动反电动势; 为衔铁运动速度;
为衔铁运动速度; 为衔铁位移。
为衔铁位移。
2)时变电磁场方程组
三维电磁模型中的电磁转矩由线圈励磁磁场产生,根据麦克斯韦定律,时变电磁场控制方程为
 (21)
(21)
式中,E为电场强度;D为电通量密度, ,
, 为介质介电常数;H为磁场强度;B为磁通密度,
为介质介电常数;H为磁场强度;B为磁通密度, ,为磁导率;
,为磁导率; 为电流密度,
为电流密度, ,
, 为电导率;
为电导率; 为电荷密度。
为电荷密度。
电磁转矩通过虚位移法求得。假设物体在受力方向上发生微小“虚位移”,根据磁场能量、力、力矩之间的关系可求得电磁转矩M为
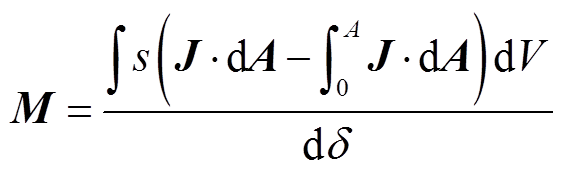 (22)
(22)
式中,A为磁矢位; 为虚位移;
为虚位移; 为体积;
为体积; 为物体质心到转轴的距离。
为物体质心到转轴的距离。
磁保持继电器动态过程可分为电磁动态过程和动力学动态过程。分别建立三维瞬态电磁场模型和动力学模型,两者在时间域内保持一致。在每一个时间步内,耦合计算结果,实现机-电-磁多物理场耦合的瞬态模型仿真[22]。
将电磁场三维实体模型导入Ansys Maxwell;设置线圈激励源,利用Simplorer搭建线圈外电路,耦合外电路与电磁场模型;根据衔铁的实际运动状态设定转动参数,绘制运动域及空气包,借助Simplorer中运动控制器件控制衔铁的运动状态;采用动态网格划分技术,每步求解后重新生成网格;划分求解域;设定求解参数。最终将耦合的Ansys Maxwell和Simplorer导入Simulink函数模块,通过对Simulink的控制实现对三维瞬态电磁场模型的控制,得出电磁系统动态特性,获取电磁转矩、线圈电流等参数。
将动力学三维实体模型导入Ansys LS-DYNA进行前处理。首先根据物体实际运动状态绘制模型网格。为了减少计算单元数量提高计算效率,选择绘制六面体单元网格,在模型发生弯曲变形和接触碰撞的位置细化网格,在其余静止或刚性体运动部位绘制稍稀疏网格。其次设定材料参数,根据模型的实际运动状态添加约束、设定接触对,对衔铁施加载荷。最后设定求解条件,参数与电磁学模型相匹配。为了提高建模效率和仿真的自动化程度,以上操作均通过APDL实现。
通过电磁场模型获取衔铁受到的电磁转矩,通过动力学模型计算出在簧片反力下衔铁的转动情况。建立Ansys Maxwell/Simplorer/Simulink和Ansys LS-DYNA之间的数据接口,即可实现相同时间域下三维瞬态电磁场模型和动力学模型的数据交互和动态耦合。联合仿真流程如图3所示。
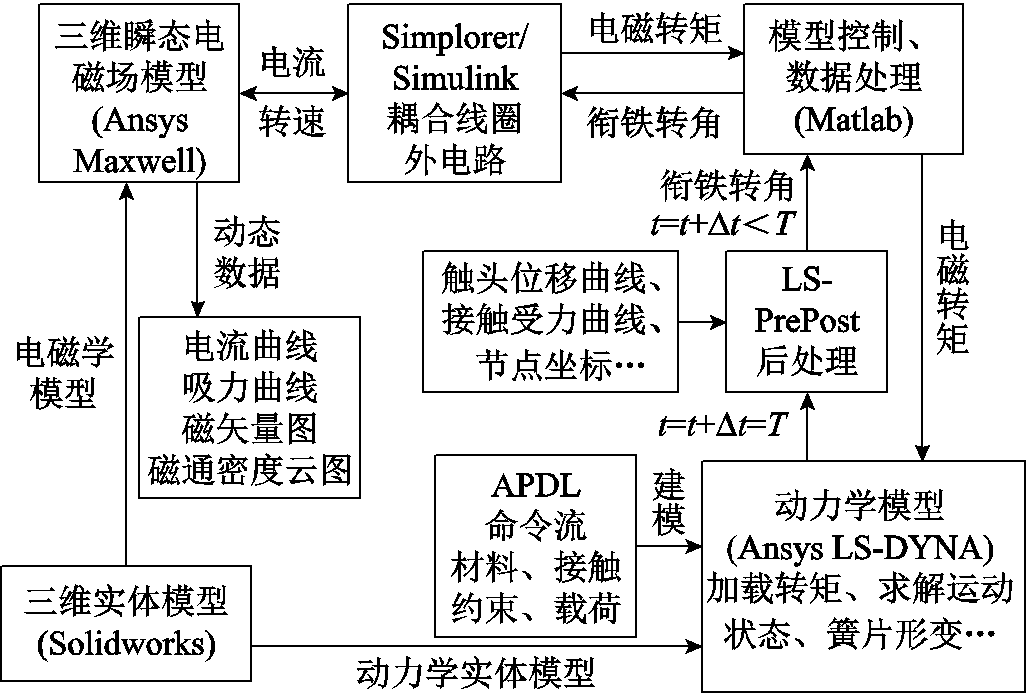
图3 联合仿真流程
Fig.3 Co-simulation flow chart
1)第1个步长
设衔铁初始转速为0,在第一个时间步内,启动三维瞬态电磁学模型,将初始转速通过Simulink赋给Simplorer运动控制器件,在此转速下,通过Simulink指令控制电磁学模型运行一个步长后暂停,并将此时的转矩曲线导出至后台文本文件中。通过APDL中VREAD指令,将生成的转矩文件导入动力学模型,并作为衔铁的转矩载荷,在求解一个步长的时间后停止动力学模型,并对动力学模型进行后处理,计算在此转矩驱动下衔铁的转速,并输出至后台文本中,第一步结束。
2)第2个步长
在第二个时间步长开始时,通过Simulink读取后台衔铁转速值,再次赋给Simplorer运动控制器件,控制Ansys Maxwell中衔铁运动,得出电磁转矩曲线,再暂停。动力学模型利用Ansys LS-DYNA的重启动功能,在上一个步长计算的基础之上,读取此时的转矩曲线,并对后台计算文件进行修改,然后进行重启动,取得下一个步长的衔铁转速。
3)步长循环
当累积的总时间步长达到所设定的总仿真时间时,计算停止。电磁学模型在Simulink的控制下,可在每步长任意启动和暂停来刷新参数,但在Ansys LS-DYNA基础上的动力学模型,无法暂停计算刷新数据,所以采用重启动功能,在上一步长的基础上更新计算文件并重启动计算,保证计算过程的连续性。全过程仿真控制程序由Matlab编写实现。
通过建立三维瞬态电磁学模型和动力学模型,对磁保持继电器的动态过程进行耦合计算。磁保持继电器参数为:线圈电压12V,线圈电阻36 ,线圈匝数930匝,求解步长0.001 25~0.1ms,计算时间15ms。通过高速摄像机和示波器等对继电器进行测试,动态特性测试实验装置如图4所示。其中,示波器用来采集继电器线圈电压及电流波形;固定装置用来固定继电器,防止触头动作带动继电器整体运动影响拍摄;卤素灯作为照明光源,其光谱中没有红外线和紫外线,显色性高;PC端图像采集控制高速摄像机拍摄、保存拍摄结果;采用Phantom M310高速摄像机拍摄继电器触头运动过程,最大记录速度可达650 000f/s,分辨率为1 280×800,最小曝光时间为1μs,配合PC端图像采集软件,可以获取大量图片。
,线圈匝数930匝,求解步长0.001 25~0.1ms,计算时间15ms。通过高速摄像机和示波器等对继电器进行测试,动态特性测试实验装置如图4所示。其中,示波器用来采集继电器线圈电压及电流波形;固定装置用来固定继电器,防止触头动作带动继电器整体运动影响拍摄;卤素灯作为照明光源,其光谱中没有红外线和紫外线,显色性高;PC端图像采集控制高速摄像机拍摄、保存拍摄结果;采用Phantom M310高速摄像机拍摄继电器触头运动过程,最大记录速度可达650 000f/s,分辨率为1 280×800,最小曝光时间为1μs,配合PC端图像采集软件,可以获取大量图片。

图4 动态特性测试实验装置
Fig.4 Dynamic characteristics test experimental device
仿真得到磁保持继电器线圈电流曲线如图5所示。将仿真电流曲线与实测电流曲线进行比较。实验测得继电器电流曲线拐点时刻为7.25ms,仿真求得曲线拐点出现时刻为7.10ms,与实测曲线相比误差为2.11%。铁心、衔铁等铁磁材料在继电器工作过程中被励磁线圈产生的磁场磁化,由于磁滞效应和磁路中永磁体的影响,使铁磁材料内部存在剩磁。当继电器重复动作时,由于剩磁的存在,铁磁材料的磁化曲线将出现偏移,模型中铁磁材料非线性的磁化曲线难以被精确模拟。上述原因使得仿真电流曲线在ab电流上升阶段与实验结果存在差异。
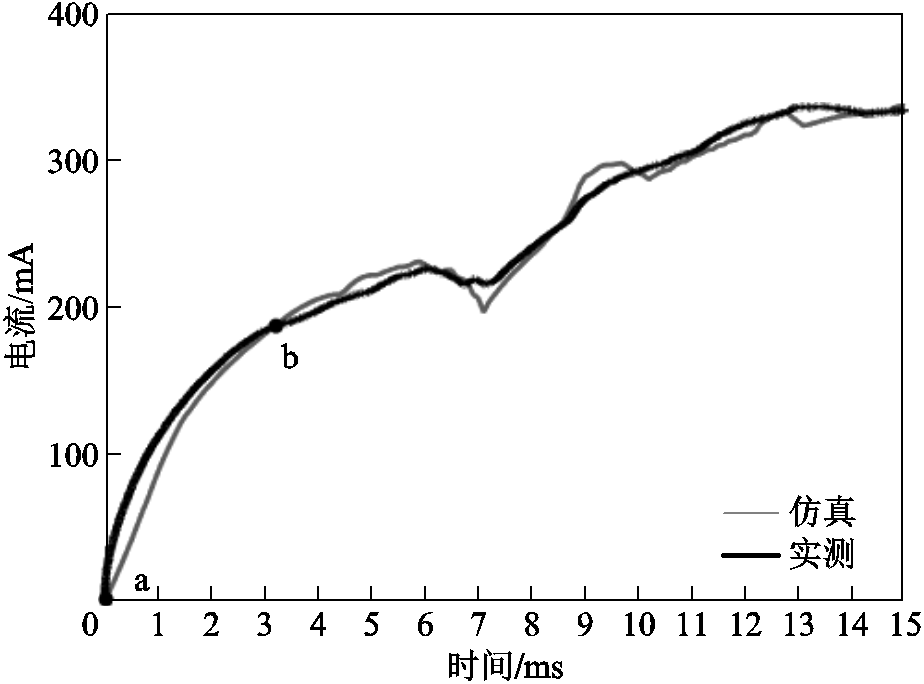
图5 仿真与实测电流曲线
Fig.5 Simulation and measured current curves
在继电器运动过程中,根据式(20)继电器线圈电压平衡方程可知,衔铁转速将对电流曲线产生影响。随着衔铁运动速度的变化,、R、 的方向不变,
的方向不变, 与的变化方向相反。在U不变的前提下,当衔铁和轭铁碰撞后,运动速度反向,运动反电动势由正变负,增大;速度回正,运动反电动势为正时
与的变化方向相反。在U不变的前提下,当衔铁和轭铁碰撞后,运动速度反向,运动反电动势由正变负,增大;速度回正,运动反电动势为正时 又减小。如此增大再减小,导致电流曲线上出现了不光滑的“凸起”。实测结果中电流曲线凸起较小是由于继电器转轴和转动块之间、滑动块和转动块之间存在较大摩擦,衔铁回弹转动的角度小。仿真模型中电磁转矩是通过虚位移法求解得出,在计算时忽略了电磁系统中的损耗部分(电阻损耗、衔铁转动摩擦力等),因此并未在仿真中转动衔铁处施加摩擦,所以衔铁回弹转动的角度会大于实际值。转动块-滑动块连接处结构如图6所示,转动衔铁和滑动块连接处存在一定间隙,由于滑动块的限制,增大的回弹角度是转动块在此间隙处的运动,对滑动块和触头运动基本无影响,但增大的角度将导致仿真中电流曲线的凸起程度大于实测值。
又减小。如此增大再减小,导致电流曲线上出现了不光滑的“凸起”。实测结果中电流曲线凸起较小是由于继电器转轴和转动块之间、滑动块和转动块之间存在较大摩擦,衔铁回弹转动的角度小。仿真模型中电磁转矩是通过虚位移法求解得出,在计算时忽略了电磁系统中的损耗部分(电阻损耗、衔铁转动摩擦力等),因此并未在仿真中转动衔铁处施加摩擦,所以衔铁回弹转动的角度会大于实际值。转动块-滑动块连接处结构如图6所示,转动衔铁和滑动块连接处存在一定间隙,由于滑动块的限制,增大的回弹角度是转动块在此间隙处的运动,对滑动块和触头运动基本无影响,但增大的角度将导致仿真中电流曲线的凸起程度大于实测值。
图6 转动块-滑动块连接处结构图
Fig.6 Structure of rotary block-sliding block joint
触头压力及位移测量装置如图7所示,在继电器触头端施加压力,使用数显推拉力计测量触头受到压力大小和触头位移量。分别使用传统模型刚柔耦合方法和Ansys LS-DYNA对簧片受力及形变情况进行模拟(两种方法均采用六面体网格单元、柔性体网格数量相近、仿真步长相同、在同一台计算机上运行),仿真及实验结果如图8所示。
图7 触头压力及位移测量装置
Fig.7 Measuring device for contact pressure and displacement
由图8可知,传统方式的触头位移结果约为实测位移的二分之一;Ansys LS-DYNA仿真的触头位移结果与实测结果基本一致。不同仿真方法结果对比见表4。在触头受到相同压力的情况下,传统方式的触头位移平均相对误差为53.11%,簧片形变偏小,簧片表现较硬;Ansys LS-DYNA仿真的触头位移平均相对误差为1.36%。二者仿真所用时间相差不大。
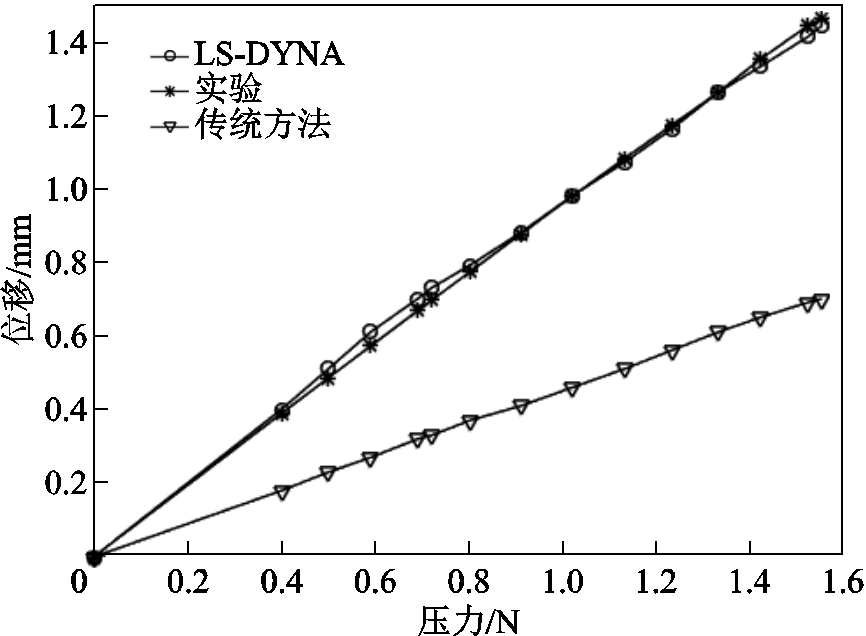
图8 不同建模方法及实验结果对比
Fig.8 Comparison of different modeling methods and experimental results
表4 不同仿真方法结果对比
Tab.4 Comparison of results of different simulation methods

方法平均相对误差(%)仿真所用时间/s LS-DYNA1.36246 传统方法53.11198
综合以上数据,相比于传统方式,Ansys LS-DYNA对于柔性体簧片的计算结果更加精准。当柔性体形变对实物的运动状态有较大影响时,如触头弹跳的影响因素,选用Ansys LS-DYNA能够得出更精确的簧片形变量。
动触头被固定在较厚动簧片上与传动部件固连,静触头被固定在较薄静簧片上。随着衔铁转动带动传动机构和动触头运动,并与静触头发生碰撞,引起静簧片摆动。
一帧高速摄像机拍摄的继电器运动过程如图9 所示。在继电器动静触头上粘贴标记点,通过高速摄像机拍摄继电器运动过程,分别提取图片中触头标记点位置和参考标记点位置,参考标记点实际圆心距为2mm,利用相似原理,得出动静触头的运动轨迹如图10所示。
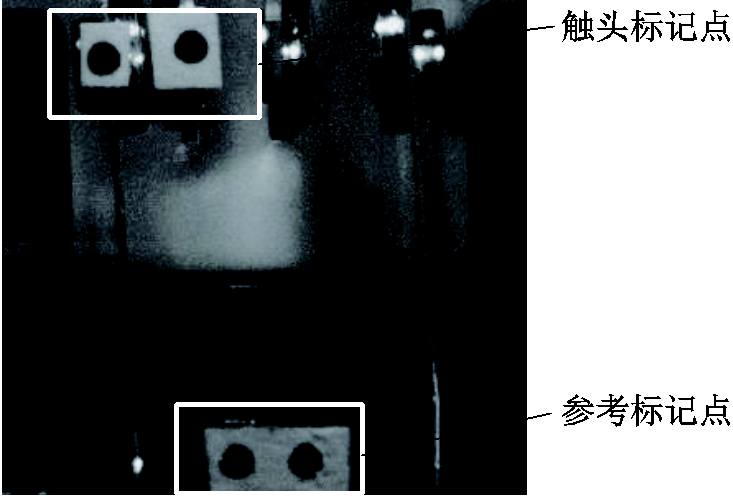
图9 继电器运动过程(一帧)
Fig.9 Relay process(a frame)
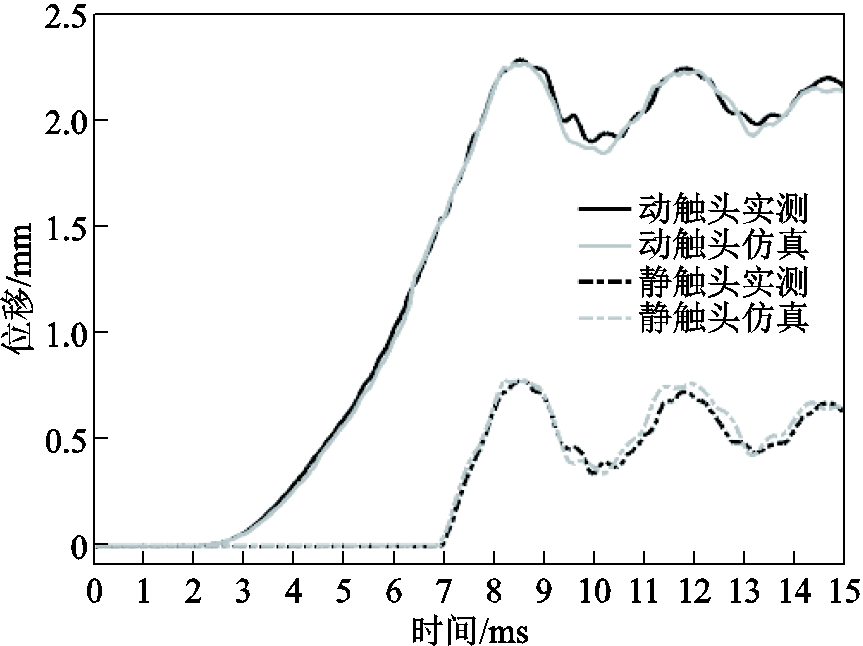
图10 仿真与实测动静触头位移情况
Fig.10 Simulation and measurement of dynamic and static contact displacement
由于粘贴的参考标记点形状与正圆存在差距,在图形识别时标记点圆心坐标存在误差;并且在触头运动过程中,粘贴在触头上的标记点随簧片摆动会存在一定角度的倾斜,摄像机拍摄视角与标记点不完全垂直,导致实测运动轨迹存在细微误差。比较两组实测与仿真曲线,动触头和静触头的运动趋势基本一致。
在继电器同一组静触头上外接一5V/5.1kΩ的负载。动静触头断开时,同组静触头两端电压为负载电压5V;动静触头吸合时,动簧片将同组静触头连接起来,此时触头两端电压为0V,以此观察继电器触头的弹跳情况。实验测得继电器的弹跳时间见表5。实测触头平均弹跳时间为3.074ms。
表5 实测触头弹跳时间
Tab.5 Measured contact bounce time
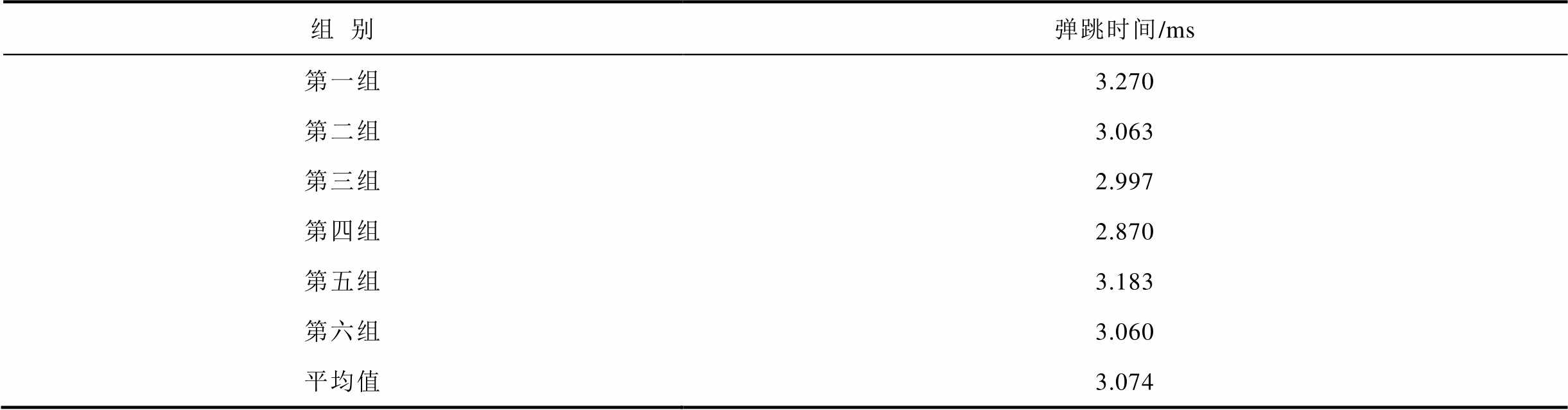
组别弹跳时间/ms 第一组3.270 第二组3.063 第三组2.997 第四组2.870 第五组3.183 第六组3.060 平均值3.074
同一继电器多次测量弹跳结果示意图如图11所示。5V(高电平)表示动静触头断开,0V(低电平)表示动静触头吸合。除第三组之外,其余五组弹跳规律为:动静触头初次碰撞—多次碰撞弹跳(约1ms)—吸合(约1ms)—多次碰撞弹跳(约1ms)—稳定吸合。动静触头的接触面为弧面,分别提取动触头和静触头弧面曲线轨迹,在同一时刻下,当两条曲线相交则为动静触头接触,触头状态记为0,反之触头断开,触头状态记为1。由此,得到仿真触头弹跳示意图如图12所示。仿真弹跳时间为3.264ms,相对误差6.18%。与实测结果相比,约7~8ms内,仿真断开(高电平)次数较多;约8~9ms内,仿真实测基本一致,触头保持吸合状态;约9~10ms内,仿真断开(高电平)次数少于实测。仿真与实测弹跳次数不完全一致,但仿真弹跳趋势与实测基本相同。
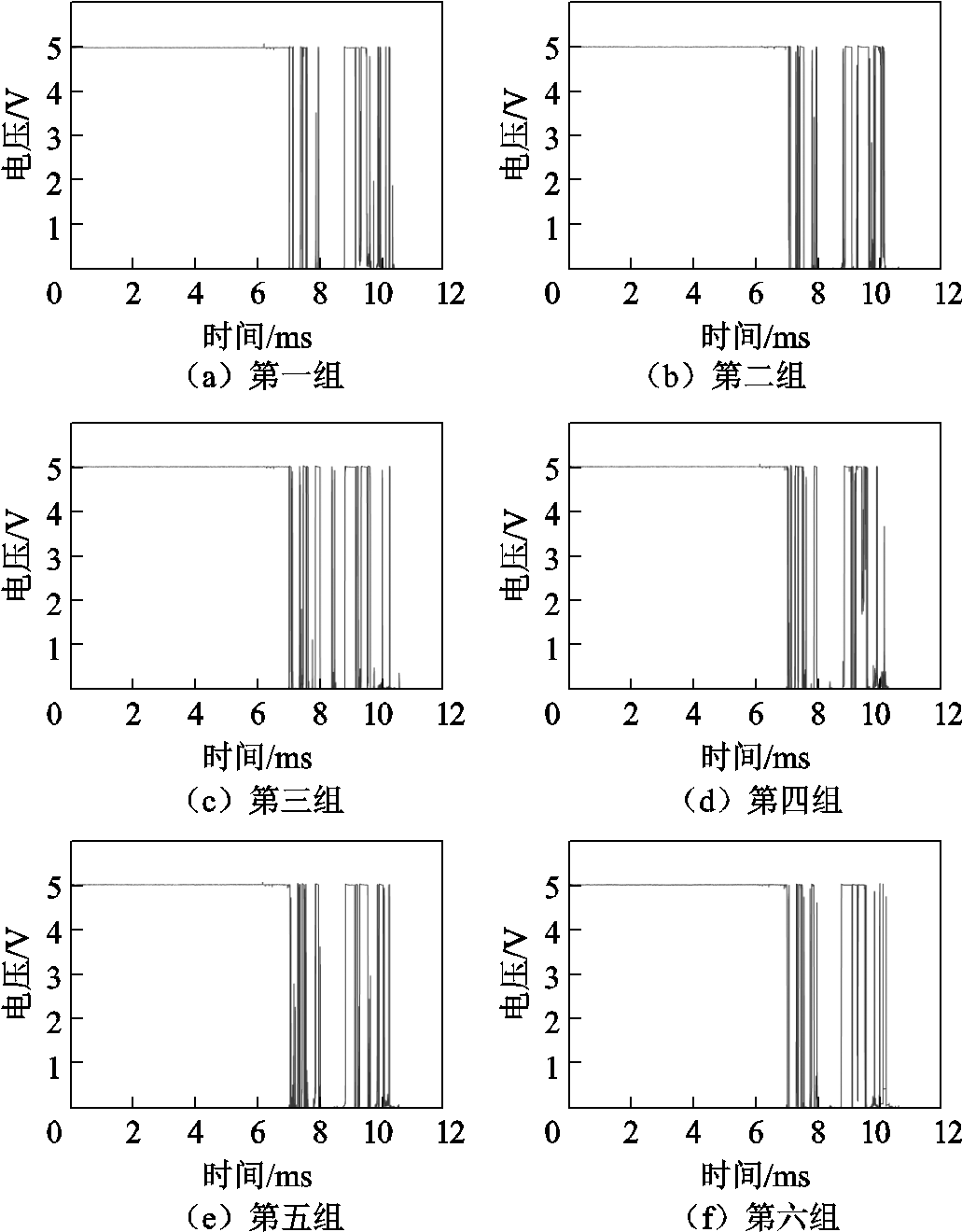
图11 实测触头弹跳示意图
Fig.11 Schematic diagram of measured contact bounce
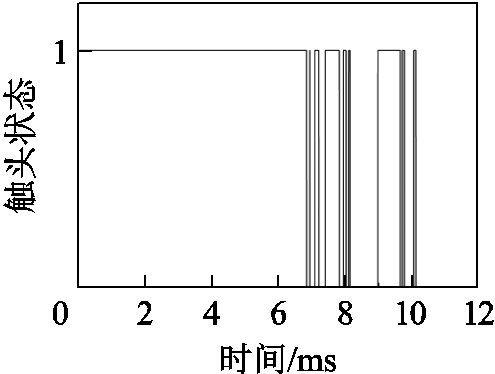
图12 仿真触头弹跳示意图
Fig.12 Schematic diagram of simulated contact bounce
通过对比电流曲线,触头运动轨迹和触头弹跳情况验证了本文所采用的基于Ansys Maxwell/ Ansys LS-DYNA的多物理场耦合模型的准确性。在此基础之上分析触头弹跳的影响因素。
继电器线圈通电后,产生电磁吸力驱动衔铁带动传动机构及触头运动。动静触头碰撞时,引起“一次弹跳”。随着动静触头碰撞,静簧片发生弯曲变形,之后在弹性作用下,恢复初始状态,呈现上下摆动的运动状态。在极短的时间下,衔铁的实际转动速度很快,所以在衔铁和轭铁第一次碰撞后,不会立即将自身动能全部损耗掉,会导致衔铁回跳,经过几次碰撞后,衔铁的能量都在碰撞中损耗尽后,衔铁稳定吸合。在衔铁回跳时,也会带动传动机构(动触头)上下运动,由此引发继电器触头的“二次弹跳”。本文分别研究静簧片弹性模量、铁心线圈电压和常闭静簧片预压力对触头弹跳的影响。
动静触头碰撞导致静簧片产生弹性形变,推动动触头共同摆动,伴随着摆动过程中各种能量损耗增加,直至静簧片不再摆动,动静触头稳定吸合。在摆动过程中,动静触头运动状态不会完全相同,会产生多次微小碰撞,影响触头稳定吸合时间。弹性模量影响簧片材料的应力应变情况,在其他参数条件相同下,本文分别计算了静簧片弹性模量分别为125~160GPa下,触头的弹跳时间和最大位移,如图13所示。
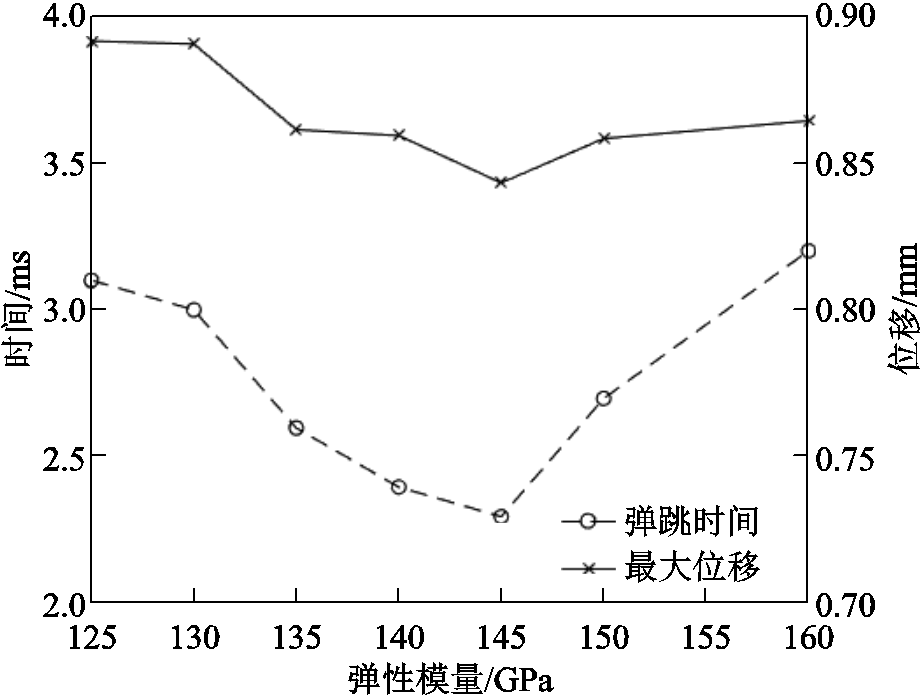
图13 不同静簧片弹性模量,触头弹跳时间和最大位移
Fig.13 Contact bounce time and maximum displacement under different elastic moduli of static reed
从图13中可以看出,静簧片弹性模量与触头弹跳时间和最大位移不是单调变化关系。当静簧片弹性模量在125~145GPa范围内,随着弹性模量的增大,触头弹跳时间和最大位移随之减小;静簧片弹性模量在145~160GPa范围内,随着弹性模量的增大,触头弹跳时间和最大位移随之增大。样机中静簧片弹性模量为125GPa,由图13中曲线可知,此种材料并非抑制触头弹跳的最佳材料。在继电器优化设计时,可通过选择弹性模量在单调变化范围内的材料来调整触头的弹跳情况。
对线圈施加电压产生驱动衔铁运动的电磁吸力,推动传动机构,使触头碰撞。不同的线圈电压产生的电磁吸力不同,引起触头弹跳的剧烈程度也不相同。12~60V线圈电压下触头的弹跳时间和最大位移如图14所示。
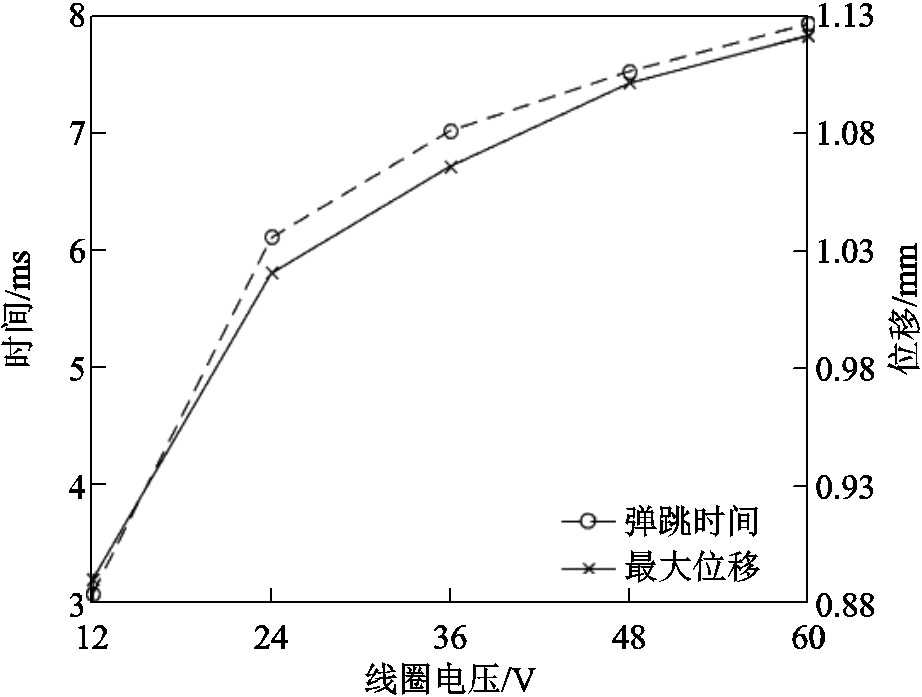
图14 不同铁心线圈电压下触头的弹跳时间和最大位移
Fig.14 Bounce time and maximum displacement of contact under different core coil voltage
从图14中可以看出,继电器线圈励磁电压在12~60V间变化时,触头的最大位移随着线圈电压的增大而增大。并且随着线圈电压的增大,触头的弹跳时间与最大位移的变化趋势几乎相同。当线圈电压取12V时,触头的最大位移为0.891mm,弹跳时间为3.074ms;当线圈电压为24V时,触头的最大位移为1.02mm,增加了约14.5%,此时的弹跳时间为6.1ms,增加了约1倍。
12~60V线圈电压下继电器的动作时间见表6。线圈电压越大,产生的电磁转矩越大,从通电至动、静触头第一次接触的时间就越短。良好的继电器性能需要快速可靠地动作。通过增大线圈电压可以减小动作时间,但在线圈线径和匝数不变的条件下会导致线圈发热,存在安全隐患,并且额定线圈电压值通常为定值,不能任意调节和改动。因此,通过调节励磁电压抑制弹跳优化方式不便于应用在实际产品优化中,可为理论分析提供参考。
表6 继电器动作时间
Tab.6 Relay operation time

线圈电压/V动作时间/ms 127.0 245.3 364.7 484.5 604.4
继电器常闭静簧片在动静触头断开时处于形变的状态,由永磁体产生的吸力压缩簧片使其变形。当线圈电磁激励抵消永磁体吸力时,在常闭静簧片弹性形变和电磁系统吸力的作用下,驱动衔铁转动。预压力是继电器动作初期的推动力,常闭静簧片的预压力不同,将影响衔铁转动的速度和时间。不同预压力下,电磁转矩为0时衔铁转速见表7,预压力越大,衔铁转速越快。
表7 不同预压力下,电磁转矩为0时衔铁转速
Tab.7 The armature speed under different precompressions when the electromagnetic torque is 0

预压力/N衔铁转速/(r/min) 0.254135.928 0.412139.878 0.573210.113 0.779259.286 0.955378.739
在其他物理参数不变的条件下,本文分别计算了静簧片预压力在0.254~0.955N触头的弹跳时间和最大位移,如图15所示。
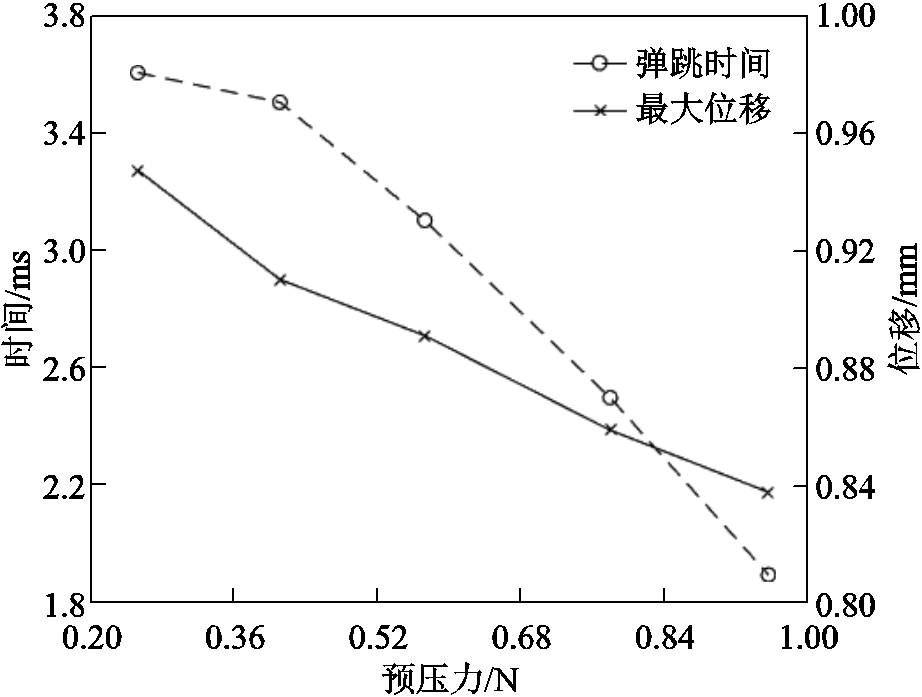
图15 不同常闭静簧片预压力下的弹跳时间和最大位移
Fig.15 Bounce time and maximum displacement of under different normally closed static reed precompressions
由图15可见,随着常闭静簧片预压力不断增大,触头的弹跳时间和最大位移随之减小。原因在于:预压力主要对继电器动作初期运动状态产生影响,缩短了动作时间中初始运动的时间。随着电磁转矩增大和预压力消失,继电器之后的运动状态受电磁转矩的影响。不同预压力下触头闭合前衔铁受到的电磁转矩和动作时间如图16所示。从图16可以看出,预压力越小,动作时间越长,电磁转矩的增长越大。电磁转矩的驱动越大,触头碰撞的弹跳情况越剧烈,弹跳时间和最大位移越大。因此,在常闭动静触头能够稳定吸合的条件下,增大常闭静簧片预压力可以缩短动作时间,抑制触头弹跳。
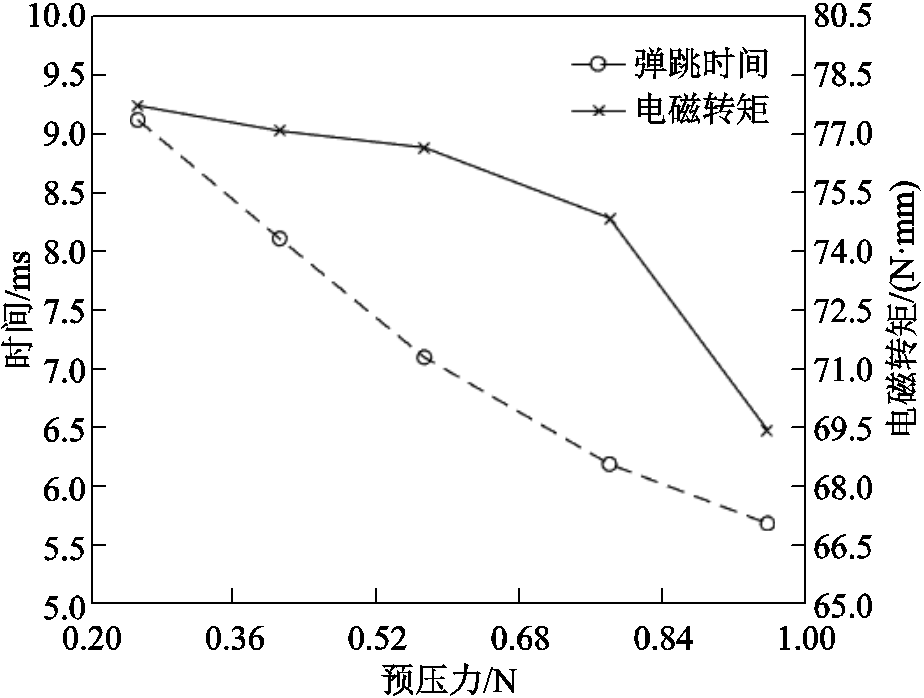
图16 不同常闭静簧片预压力下的动作时间和触头碰撞前衔铁电磁转矩
Fig.16 Action time under different normally closed static reed precompressions and armature electromagnetic torques before contact collision
本文通过建立磁保持继电器的电磁学模型和动力学模型,实现多物理场的瞬态耦合仿真,求解继电器动态特性,并以此模型对触头弹跳影响因素进行分析。结论如下:
1)采用Ansys LS-DYNA能够实现对继电器柔性体簧片和其余刚体部件动力学仿真。在此基础上通过Matlab建立Ansys Maxwell与Ansys LS-DYNA的数据交互接口,实现多物理场联合仿真。
2)通过机-电-磁多物理场耦合仿真,得到磁保持继电器的动态特性和触头的运动情况。通过与试验结果对比,二者的吻合程度较好。
3)在常开动静触头能够稳定吸合的前提下,选择弹性模量较大的静簧片材料可以抑制触头弹跳。
4)减小继电器线圈电压能够抑制弹跳,增大继电器线圈电压能够减小继电器动作时间。但继电器线圈电压通常为固定值,不能随意改动,改变线圈电压抑制弹跳的优化方式受到线圈电压值的限制。因此,线圈电压对弹跳的影响可作为理论分析的参考。
5)常闭静簧片的预压力与触头弹跳时间和最大位移成反比,在不影响继电器触头通断的前提下,增大常闭静簧片预压力能够有效抑制触头弹跳。
参考文献
[1] 房雅琦, 任万滨. 电磁继电器触点闭合回跳现象的实验研究[J]. 电器与能效管理技术, 2020(6): 5-9.
Fang Yaqi, Ren Wanbin. Experimental investigation of contact bounce phenomena occurred in electromagnetic relay[J]. Electrical & Energy Management Technology, 2020(6): 5-9.
[2] 孙曙光, 王锐雄, 杜太行, 等. 基于粗糙集与证据理论的交流接触器预期电寿命预测[J]. 电工技术学报, 2020, 35(10): 2158-2169.
Sun Shuguang, Wang Ruixiong, Du Taihang, et al. Expected electrical life prediction of AC contactor based on rough set and evidence theory[J]. Transactions of China Electrotechnical Society, 2020, 35(10): 2158-2169.
[3] 张高廷, 曹云东, 刘炜. 簧片式继电器固有振动特性研究[J]. 电工技术学报, 2020, 35(2): 292-299.
Zhang Gaoting, Cao Yundong, Liu Wei. The natural vibration characteristics of reed relay[J]. Transactions of China Electrotechnical Society, 2020, 35(2): 292-299.
[4] 李亚峰, 王发展, 王雁琨, 等. 接触器触头系统弹跳行为仿真及影响因素分析[J]. 机械科学与技术, 2021, 40(1): 55-62.
Li Yafeng, Wang Fazhan, Wang Yankun, et al. Bumping behavior simulation and influencing factors analysis of contact system in AC contactor[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(1): 55-62.
[5] Jiang Li, Wang Rui, Yuan Jing, et al. Optimization design of electromagnetic relay based on improved particle swarm optimization algorithm[C]//2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi'an, China, 2018: 202-205.
[6] 吴敬轩, 许志红. 电磁接触器吸合过程无模型自适应控制策略[J]. 中国电机工程学报, 2020, 40(5): 1663-1673.
Wu Jingxuan, Xu Zhihong. A model-free adaptive control strategy for actuation of electromagnetic contactors[J]. Proceedings of the CSEE, 2020, 40(5): 1663-1673.
[7] 李兴文, 陈德桂, 孙志强, 等. 交流接触器动态过程及触头弹跳的数值分析与实验研究[J]. 中国电机工程学报, 2004, 24(9): 229-233.
Li Xingwen, Chen Degui, Sun Zhiqiang, et al. Numerial analysis and experimental investigation of dynamic behavior and contact bounce of ac contactor[J]. Proceedings of the CSEE, 2004, 24(9): 229-233.
[8] 鲍光海, 吴守龙. 接触器短路分断特性的动力学仿真及实验研究[J]. 电工技术学报, 2014, 29(9): 181-186.
Bao Guanghai, Wu Shoulong. Dynamics simulation and experimental research on short-circuit breaking characteristics of contactor[J]. Transactions of China Electrotechnical Society, 2014, 29(9): 181-186.
[9] 刘建强, 陈爱峰, 闫一凡, 等. 高速列车电磁接触器可靠性评估方法[J]. 电工技术学报, 2018, 33(增刊2): 461-471.
Liu Jianqiang, Chen Aifeng, Yan Yifan, et al. Reliability evaluation method of electromagnetic contactor used in high-speed train[J]. Transactions of China Electrotechnical Society, 2018, 33(S2): 461-471.
[10] 荣命哲, 娄建勇, 王小华. 永磁式接触器动触头动作特性仿真分析与试验研究[J]. 中国电机工程学报, 2005, 25(1): 109-113.
Rong Mingzhe, Lou Jianyong, Wang Xiaohua. Simulation analysis and experimental research of operating characteristic for moving contact of contactor with permanent magnet actuator[J]. Proceedings of the CSEE, 2005, 25(1): 109-113.
[11] 林抒毅, 许志红. 交流接触器三维动态过程数值计算与分析[J]. 中国电机工程学报, 2014, 34(18): 2967-2975.
Lin Shuyi, Xu Zhihong. Simulations and numerical analysis on 3D dynamic process of alternating current contactors[J]. Proceedings of the CSEE, 2014, 34(18): 2967-2975.
[12] 何晓燕, 许志红. 交流接触器虚拟样机设计技术[J]. 电工技术学报, 2016, 31(14): 148-155.
He Xiaoyan, Xu Zhihong. Virtual prototyping technology of AC contactor[J]. Transactions of China Electrotechnical Society, 2016, 31(14): 148-155.
[13] 游颖敏, 王景芹, 舒亮, 等. 基于音频特征的交流接触器电寿命预测方法[J]. 电工技术学报, 2021, 36(9): 1986-1998.
You Yingmin, Wang Jingqin, Shu Liang, et al. The method of electrical life prediction considering the audio characteristics of AC contactor[J]. Transactions of China Electrotechnical Society, 2021, 36(9): 1986-1998.
[14] 翟国富, 樊薇薇, 叶雪荣, 等. 具有回跳特征的电磁继电器动态反力计算模型[J]. 电工技术学报, 2009, 24(1): 88-94.
Zhai Guofu, Fan Weiwei, Ye Xuerong, et al. Dynamic reaction calculation model of the relay considering bounce[J]. Transactions of China Electrotechnical Society, 2009, 24(1): 88-94.
[15] 杨文英, 刘兰香, 刘洋, 等. 考虑碰撞弹跳的接触器动力学模型建立及其弹跳特性影响因素分析[J]. 电工技术学报, 2019, 34(9): 1900-1911.
Yang Wenying, Liu Lanxiang, Liu Yang, et al. Establishing of contactor dynamic model considering collision bounce and analysis of influencing factors of bounce characteristics[J]. Transactions of China Electrotechnical Society, 2019, 34(9): 1900-1911.
[16] 付饶, 梁慧敏, 叶雪荣, 等. 接触器触点超程分析及其退化状态的诊断[J]. 电工技术学报, 2020, 35(1): 125-133.
Fu Rao, Liang Huimin, Ye Xuerong, et al. Analysis of the contact overtravel of contactor and its degradation state evaluation[J]. Transactions of China Electrotechnical Society, 2020, 35(1): 125-133.
[17] Yu Hao, Liang Huimin, Bo Kai, et al. Virtual prototype and optimal design of short circuit current capability of magnetic latching relay[C]//2018 IEEE Holm Conference on Electrical Contacts, Albuquerque, NM, USA, 2019: 124-129.
[18] Liu Lanxiang, Yang Wenying, Chai Yuyang, et al. A new theoretical model to study the closing bounce characteristics of the electromagnetic relay under capacitive loads[J]. IEEE Transactions on Components, Packaging and Manufacturing Technology, 2020, 10(8): 1358-1366.
[19] 苏秀苹, 杜士平. 三相磁保持继电器动态特性分析及容差设计[J]. 电器与能效管理技术, 2018(4): 50-54.
Su Xiuping, Du Shiping. Dynamic characteristic analysis and tolerance design of three phase magnetic latching relay[J]. Electrical & Energy Management Technology, 2018(4): 50-54.
[20] 乔延华, 赵琳, 苏秀苹, 等. 基于ADAMS的磁保持继电器的动态性能分析及优化设计[J]. 科学技术与工程, 2019, 19(8): 107-113.
Qiao Yanhua, Zhao Lin, Su Xiuping, et al. Dynamic performance analysis and optimization design of magnetic latching relay based on ADAMS[J]. Science Technology and Engineering, 2019, 19(8): 107-113.
[21] 薛毓强, 吴金龙. 基于分布参数磁路模型的永磁接触器吸力特性[J]. 电工技术学报, 2014, 29(7): 222-228.
Xue Yuqiang, Wu Jinlong. Study of attractive force characteristics based on magnetic distributed parameter circuit model of permanent magnet contactors[J]. Transactions of China Electrotechnical Society, 2014, 29(7): 222-228.
[22] 赵升, 舒亮, 吴自然, 等. 电磁-永磁复合型接触器数值仿真与控制方法[J]. 电工技术学报, 2020, 35(5): 1083-1092.
Zhao Sheng, Shu Liang, Wu Ziran, et al. Numerical simulation and control method of electromagnetic-permanent composite contactor[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 1083-1092.
Abstract Contact wear and contact adhesion caused by contact bounce have an important impact on the electrical life of relay. Considering the complex contact bounce of the magnetic latching relay under the interaction of elastic deformation of the reed and contact collision, the processing method defining the model as rigid body cannot restore the actual motion state of the flexible reed. The collision of the rigid body leads to the deformation of the spring of the flexible body, which affects the action time and bounce of the relay. The accurate simulation of the movement state of the reed is an important prerequisite to ensure that the simulation results of dynamic characteristics have reliable reference value.
In order to improve the accuracy and reliability of dynamic characteristics simulation, a rigid flexible coupling dynamic model is established to simulate the movement state of the relay. The traditional rigid flexible coupling method of model is to obtain the modal neutral file required for the establishment of flexible body with the aid of finite element software, and realize the coupling of rigid flexible model by importing the modal neutral file into the rigid body model of multi-body dynamics software. In addition to material properties, the deformation of flexible bodies is also affected by the mode order and the key points derived from the modal neutral file. Based on the motion equation, material constitutive equation and boundary conditions, the mathematical model of the motion field of the relay is established. Considering the impact of collision deformation of components on relay operation process, symmetrical penalty function method, hourglass coefficient and damping coefficient are used to deal with collision, contact and deformation of components. With the dynamics software Ansys LS-DYNA, the rigid flexible coupling model of relay electromagnetic system, contact system and transmission mechanism is established. Use APDL to build mechanical dynamics model. The electromagnetic model of relay is established based on Maxwell equations, the three-dimensional finite element model of electromagnetic system components is established by using the electromagnetic software Ansys Maxwell, and the external circuit of relay excitation coil is established by using the simulation software Ansys Simplorer. The electromagnetic system component model and the external circuit of the coil are coupled to form the relay electromagnetic model. Compared with the traditional circuit editor coupling mode, Ansys Simplorer has a stronger control function and a Simulink communication interface to receive the motion data of the relay. Simulink is used to control the start stop and data processing of the electromagnetic model. There is no ready-made data interaction channel between the electromagnetic model and the dynamic model. The Matlab program is used to control the data exchange of different physical field models, so as to realize the coupling calculation and data interaction of multiple physical fields of the two models in the same time domain.
The simulation results of the relay coil current curve, the reed shape variable of the dynamic model and the contact movement track are basically consistent with the measured results; Both the simulation and actual measurement of contact bounce show the phenomenon of bounce pull in bounce stable pull in, which verifies the accuracy of the multi physical field coupling model. On the basis of simulation, the influence of static spring elastic modulus, core coil voltage and normally closed static spring preload on contact bounce is investigated.
The 3D transient multi physical field coupling simulation can truly restore the working state of the relay product, simulate the dynamic characteristics of the relay and the contact movement. The larger elastic modulus and the larger pre pressure of the normally closed static spring can optimize the structural design of the relay and inhibit the contact bounce.
keywords:Magnetic latching relay, dynamic characteristics, Ansys LS-DYNA, contact bounce
DOI:10.19595/j.cnki.1000-6753.tces.211312
中图分类号:TM581.3
收稿日期 2021-08-17
改稿日期 2021-11-28
鲍光海 男,1977年生,博士,副教授,研究方向电器及其系统智能化与故障诊断。E-mail:19428733@qq.com(通信作者)
王金鹏 男,1995年生,硕士研究生,研究方向为电器多物理场耦合建模与虚拟样机设计技术。E-mail:569936850@qq.com
(编辑 赫蕾)