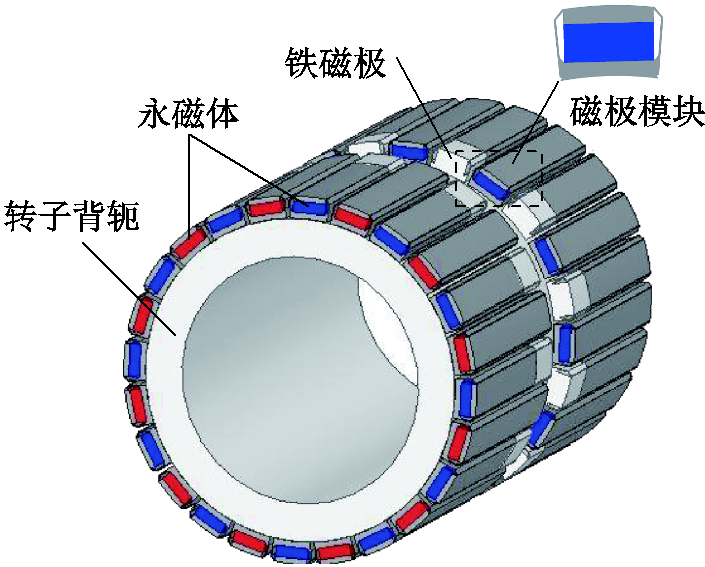
图1 HESM转子拓扑结构
Fig.1 Rotor topology of the HESM
摘要 针对分析混合励磁同步电机电磁特性时,三维有限元法计算量大、耗时长,解析法难以考虑铁磁材料饱和影响的问题,提出一种改进的三维等效磁网络模型。该模型考虑了模块化定子齿和转子极靴不均匀饱和,磁极间漏磁、磁极端部漏磁和定子槽内漏磁,能够快速预测具有模块化定转子结构的新型混合励磁同步电机的电磁特性;在建模过程中,根据电机转动时定转子的相对位置,建立相应的气隙磁导等效模型,以进行动态分析。利用该模型,计算了混合励磁同步电机的气隙磁通密度分布、磁链、反电动势和转矩,分析了电机的励磁调节能力。最后,将计算结果与三维有限元、样机实验结果进行比较,验证了该模型的准确性和有效性,为具有三维磁通路径特性的复杂结构电机提供一种快速的初期设计方法。相比于传统模型,该模型精度提高约9.5%;相比于三维有限元法,该模型所需计算时间仅为其0.05%。
关键词:混合励磁同步电机 三维等效磁网络模型 三维有限元分析 电磁特性分析
混合励磁同步电机(Hybrid Excitation Synchronous Machines, HESM)由永磁和电励磁两种励磁源组合而成,具有气隙磁场调节方便、高转矩密度、效率高、弱磁操作简单等优点,在工业驱动、新能源交通运输装备和新能源发电等领域具有广阔的应用前景[1-6]。但与常规永磁同步电机相比,HESM的磁通路径在空间中呈三维分布,不能使用传统二维电机设计方法,导致HESM的初期设计、性能分析更为困难。
为了分析HESM的电磁性能,通常采用有限元分析(Finite-Element Analysis, FEA)法[7]、基于拉普拉斯-泊松方程的解析法和等效磁网络(Equivalent Magnetic Network, EMN)。FEA虽然计算结果精确,但是在电机设计初期,经常需要对电机结构参数进行改进,使用高精度网格的三维FEA会占用大量的存储资源,并且消耗大量的计算时间[8]。解析法是快速获取电机性能的有效工具之一,但是该方法难以考虑铁磁材料饱和的影响,会降低计算精度[9]。而EMN在FEA法和解析法之间取了很好的折中,将电机内磁通分布均匀的部分划分为形状规则的磁通管,且磁通管的数量远远小于FEA法中网格剖分的数量,计算时间大打折扣。此外,认为每个磁通管内的磁通密度均保持一致,可以容易地考虑铁磁材料的非线性饱和问题,且计算结果的精度接近FEA。
目前,利用EMN模型预测电磁性能的方法已经成功应用到各类设备之中。例如应用到表贴式永磁电机[10]、内置式永磁电机[11]、直线旋转电机[12]、轴向磁通永磁同步电机[13]、横向磁通永磁同步电机[14-16]以及磁悬浮轴承[17-18]等。但对于具有三维磁通路径结构的HESM,相关研究仍相对较少。
文献[15]建立了新型盘式横向磁通永磁无刷电机的变网络EMN简化模型,根据该模型计算出的负载时磁链和电磁转矩波形与FEA相比,存在较大的偏差。文献[16]针对一台新型横向磁通永磁同步电机建立了EMN模型,将三维磁路转换为二维,并引入深度系数的概念对定子齿进行细化剖分。但由于磁路的简化和忽略了部分漏磁的影响,通过该模型计算出的电感和反电动势与FEA相比仍有一定误差。文献[19]建立了一种磁通切换混合励磁电机的EMN模型,探索了磁桥部分磁通密度的估算方法。但该模型对电机磁桥部分的划分简单,大大降低了计算精度,增磁和去磁情况下的电磁特性与FEA相比误差较大。文献[20]针对一台存在轴向、周向磁通路径的混合励磁电机,建立了其二维EMN模型,验证了所提出的等效二维FEA模型的有效性,但未考虑饱和的影响。文献[21-22]建立了新型混合励磁发电机的EMN模型,但忽略了电机的局部饱和与部分漏磁的影响,计算结果与FEA相比误差很大。文献[23]针对一台新型轴向磁通混合励磁电机,建立了三维EMN模型,该模型考虑了铁心饱和、极间漏磁、电励磁导磁环等漏磁的影响,提高了模型的计算精度,但轴向电机与径向电机存在结构差异,所提模型不适用于径向电机。
本文针对新型模块化HESM,提出了一种改进的三维非线性动态EMN模型,用来预测HESM的电磁特性和调磁能力。研究电机在转动过程中,气隙等效磁阻的变化情况,建立对应的等效气隙模型,提高了动态分析的速度。模型考虑了模块化定子齿和转子极靴不均匀饱和,磁极间、磁极端部和定子槽内漏磁的影响。基于改进的EMN模型,分别计算了HESM的气隙磁通密度分布、磁链、反电动势和转矩,验证了考虑模块化定子齿和转子极靴不均匀饱和以及漏磁的必要性,并分析了HESM励磁调节能力。最后,制作了一台HESM样机,将三维非线性EMN模型的计算结果与三维FEA、样机实验结果进行比较,验证了该模型的准确性和有效性,为具有三维磁通路径特性的电机提供了一种快速的初期设计方法。
新型模块化HESM由传统永磁电机和电励磁电机组合而成,转子采用挂极结构,单个磁极为一个模块;定子采用挂齿结构,单个定子齿为一个模块,其转子和定子拓扑结构分别如图1和图2所示。
图1 HESM转子拓扑结构
Fig.1 Rotor topology of the HESM
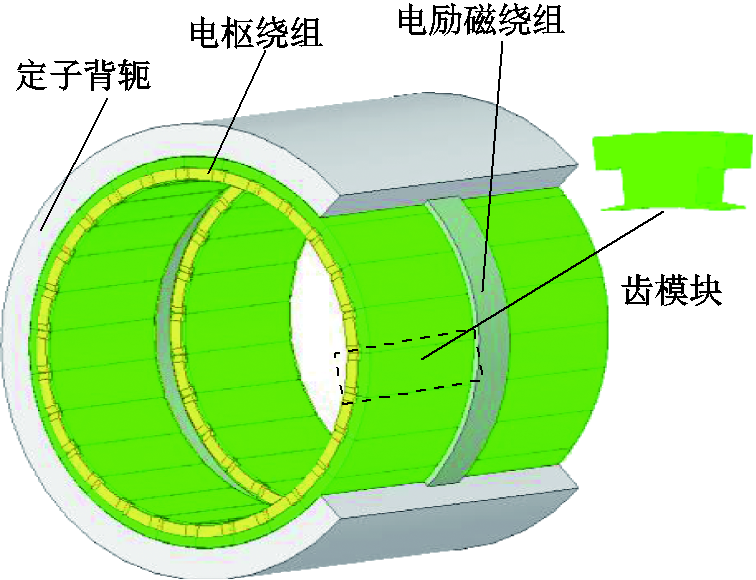
图2 HESM定子拓扑结构
Fig.2 Stator topology of the HESM
HESM沿轴向可分为三段,如图3所示。中间段转子采用磁极交替的形式,永磁磁路和电励磁磁路为并联关系,降低了电机的不可逆去磁风险,提高了磁通调节能力,该段命名为混合励磁磁极段。两侧段为增加的传统永磁同步电机,可以在拓宽调速范围的同时提高电机的转矩密度,该段命名为永磁体磁极段。定子上的两段电枢铁心和转子上的磁极分别通过定子、转子背轭固定在一起,实现电磁和机械上的联系。
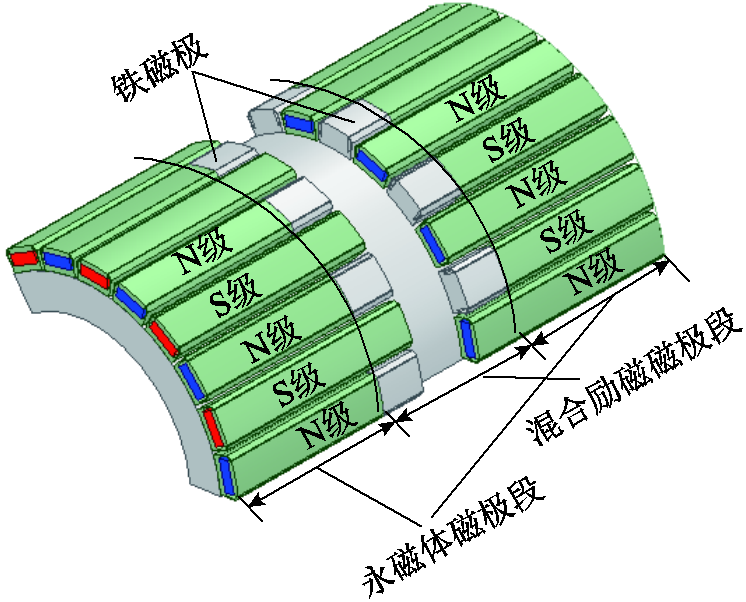
图3 HESM轴向分段示意图
Fig.3 Diagram of the HESM axial segmentation
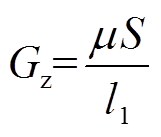
与FEA相似,由于电机结构具有对称性,满足周围性边界条件[24],可用8极9槽的单元电机建立EMN模型,减少计算量并提高计算速度。根据电机的磁通走向,可以得到轴向、切向和径向三种典型的等效磁导。三种典型的磁通方向如图4所示,磁导计算公式分别为
 (1)
(1)
 (2)
(2)
 (3)
(3)
式中,Gz为轴向磁导;Gq为切向磁导;Gj为径向磁导;S为单元的面积;l1为单元的轴向长度;R1为外径;R2为内径;θ1为单元中心角的弧度;μ为相对磁导率。
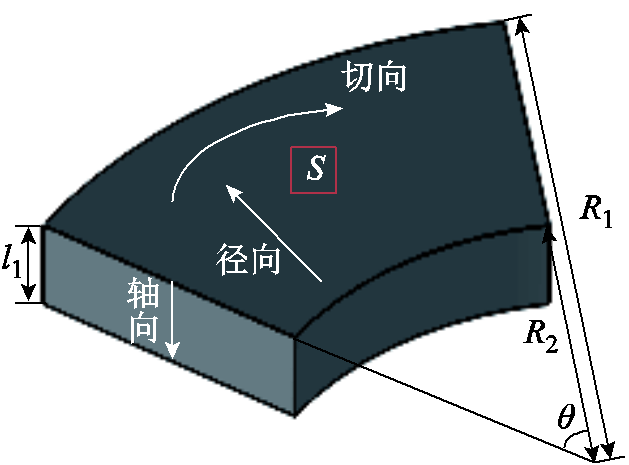
图4 三种典型磁通方向
Fig.4 Typical magnetic flux directions
由于模块化定子齿和转子极靴部分存在严重的局部饱和现象,为保证EMN模型的准确性,有必要对定子齿和转子极靴进行密集地分割。根据定子齿的形状,齿尖分成9个元件,齿中分成3个元件,齿根分成1个元件,如图5所示。极靴分成24个元件,如图6所示。其中,Gtr和Gtt是齿尖切向和径向磁导,Gt和GST是齿中和齿根磁导,Gshoe和GPM是极靴和永磁体磁导。
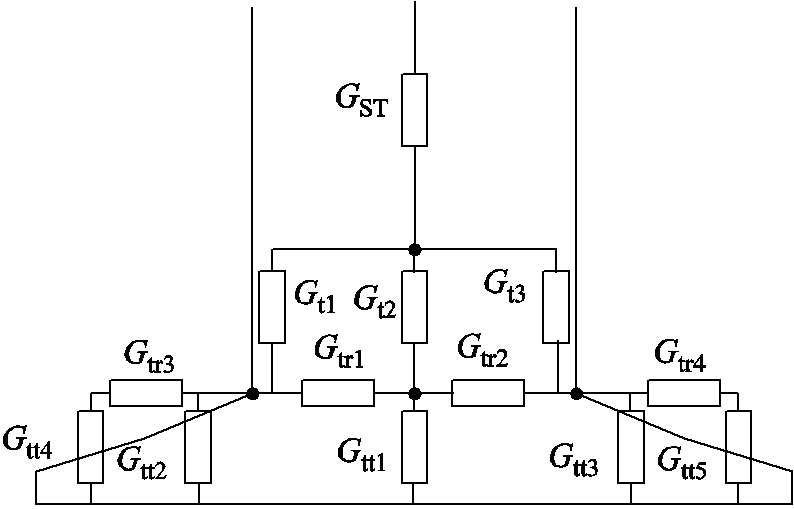
图5 模块化定子齿磁导分割
Fig.5 Stator tooth permeance division
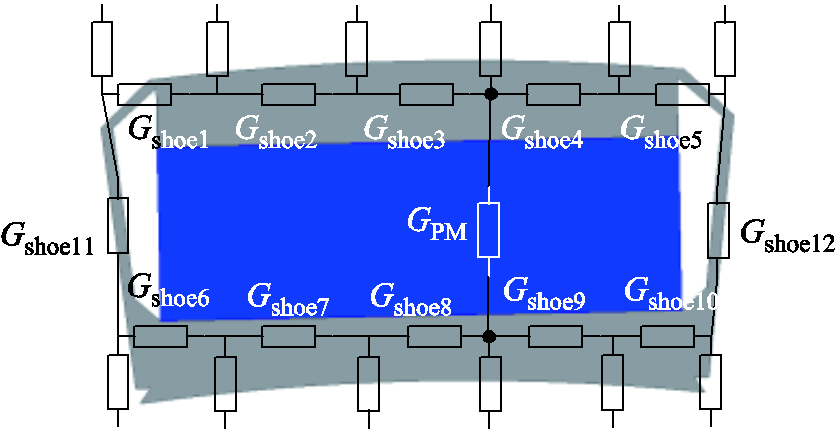
图6 转子极靴磁导分割
Fig.6 Rotor pole shoe permeance division
合理考虑漏磁的影响也是建模的关键。电机的漏磁主要包括磁极间、磁极端部和定子槽内漏磁。
转子磁极间的漏磁和磁极端部的漏磁如图7所示。两者均可以等效为一个矩形加两个1/4圆环的磁通管结构。磁导计算公式分别为
 (4)
(4)
 (5)
(5)
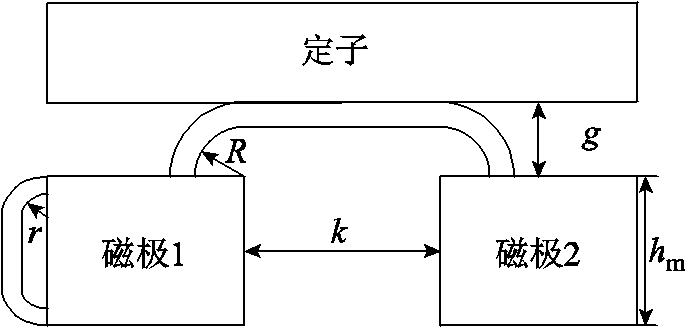
图7 转子漏磁示意图
Fig.7 Schematic diagram of rotor pole flux leakage
定子槽内的漏磁示意图如图8所示。可将该路径等效成矩形、梯形和半圆结构。磁导计算公式为
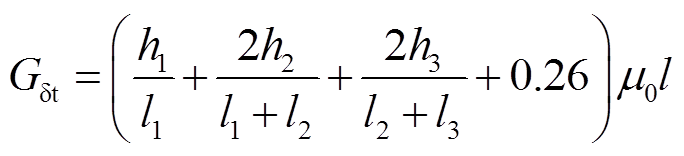 (6)
(6)
式中,Gdm、Gde、Gdt分别为磁极间、磁极端部和槽内漏磁导;μ0为真空磁导率;g为气隙长度;lp为磁极轴向长度;l为电机的轴向长度;K为极间宽度;hm为磁极厚度;R、r为磁通管圆弧处半径;l1、l2、l3和h1、h2、h3分别为各部分槽宽与槽高。
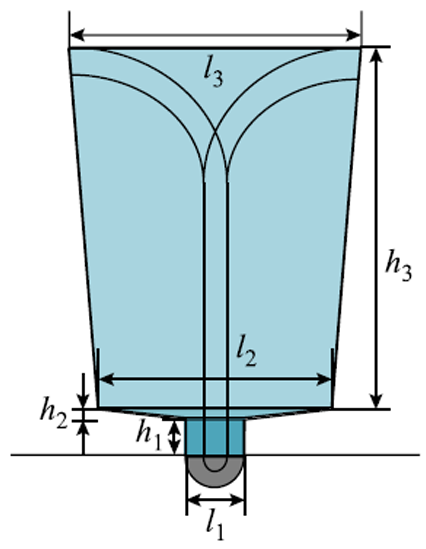
图8 定子槽内漏磁示意图
Fig.8 Schematic diagram of stator slot flux leakage
因为空气的磁导率要比铁磁材料小得多,尽管气隙的长度很小,仍然会对整个EMN的精度产生很大的影响。因此,气隙磁导的合理等效至关重要。随着电机转子的运动,磁力线路径在不停地变化,气隙部位的等效磁导也随之改变。以一个极距为例,可以把转动过程中等效气隙磁导的变化分为八种情况,其中两两对称。非对称的四种模型如图9所示。转子磁极为铁磁极时该建模同样适用。
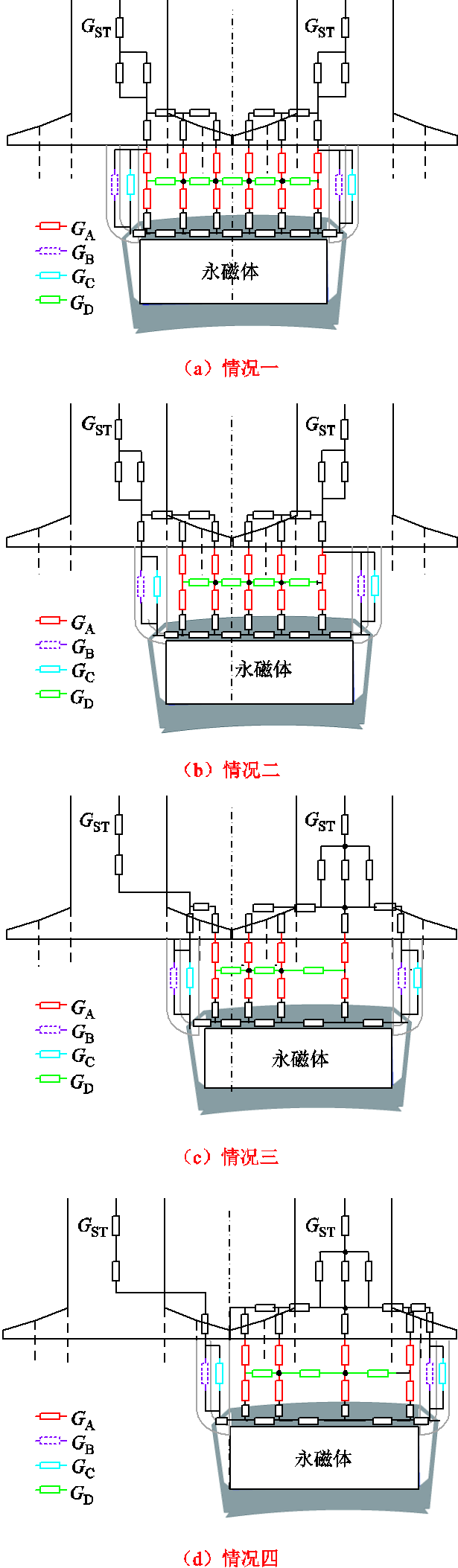
图9 不同位置下的等效气隙磁导模型
Fig.9 Equivalent air gap permeance model in different positions
根据对气隙等效磁导的分析,可以得到GA、GB、GC和GD四种典型气隙磁导,磁通管的形状如图10所示[16]。这些磁通管等效磁导表达式分别为
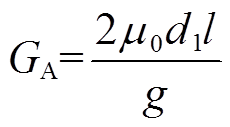 (7)
(7)
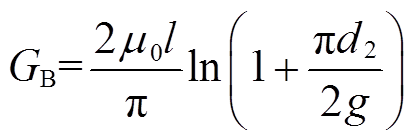 (8)
(8)
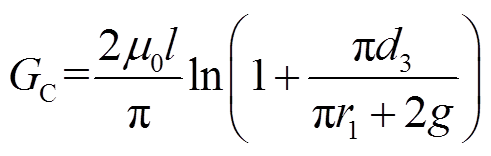 (9)
(9)
 (10)
(10)
式中,d1、d2、d3分别为对应磁通管宽度;r1为1/4圆环磁通管半径。
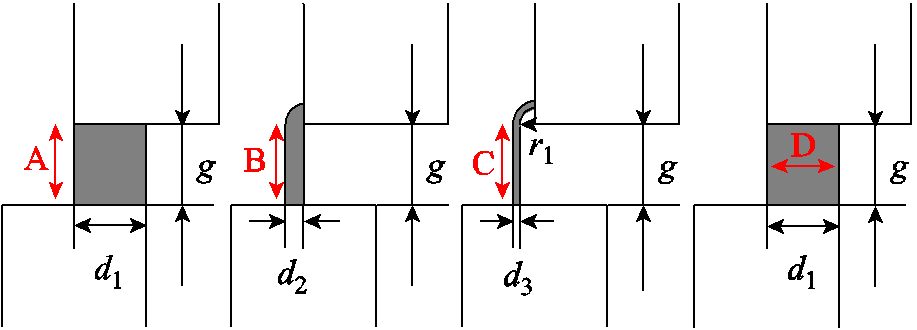
图10 四种典型气隙磁导
Fig.10 Four typical air-gap permeance
通过分割和等效,建立HESM一对极下的三维EMN模型,如图11所示。为了更方便、快速地计算电磁性能,可将一对极下的三维EMN模型转化为局部单元电机的二维EMN模型,如图12所示。
图11中,FDC为直流励磁磁势,FPM-N1、FPM-S1为混合励磁段N、S极永磁体磁势,FPM-N2、FPM-S2为永磁体段N、S极永磁体磁势,Giron为铁磁极磁导,Gr为转子磁导,Gy、Gg分别为轭部、气隙磁导。
基于电路和磁路的相似性,利用节点电压法求解所提出的EMN模型。模型中各参量的关系为
 (11)
(11)
 (12)
(12)
 (13)
(13)
 (14)
(14)
式中,F为磁通矩阵;F(i) 为节点i的磁通;G为磁导矩阵;G(i, j)为节点i与节点j之间的磁导;F为磁动势矩阵;F(i)为节点i的磁动势;n为节点数;m为支路数。
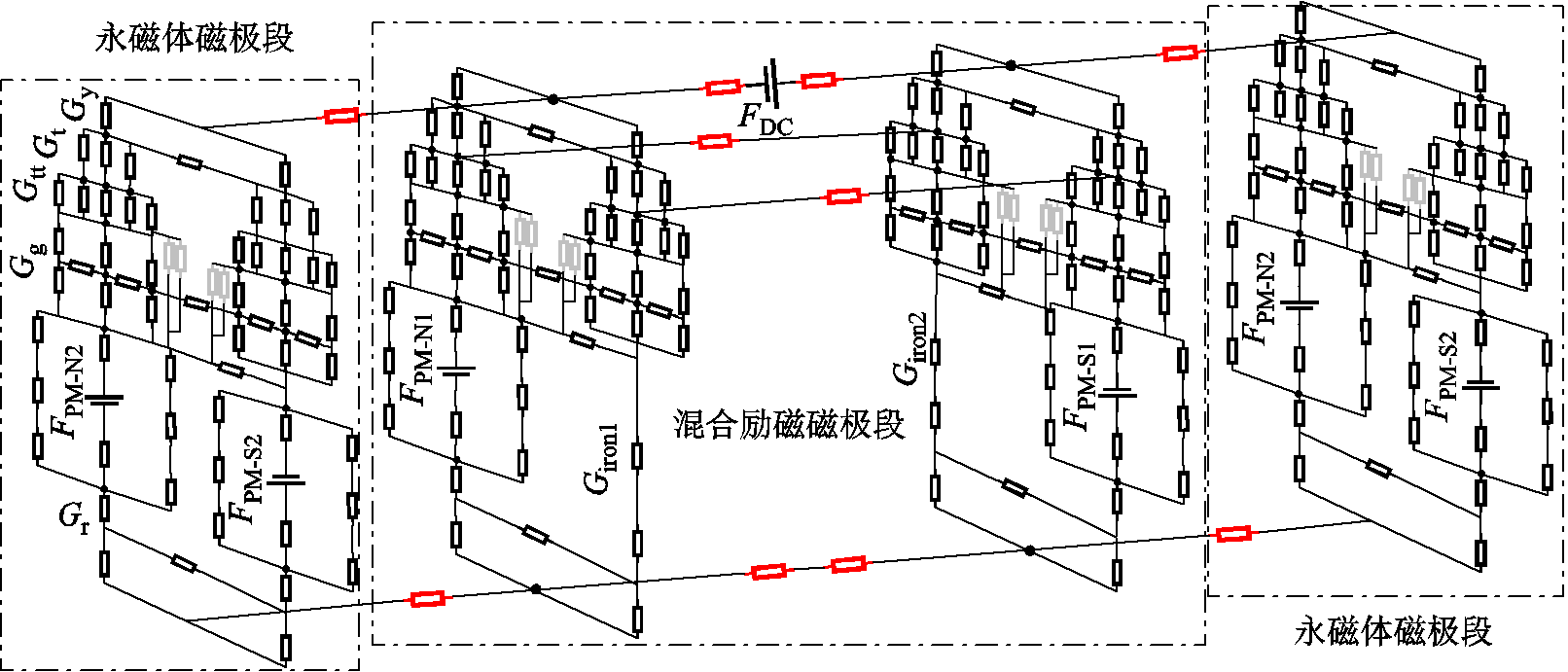
图11 一对极的三维等效磁网络图
Fig.11 3-D EMN diagram of a pair of poles
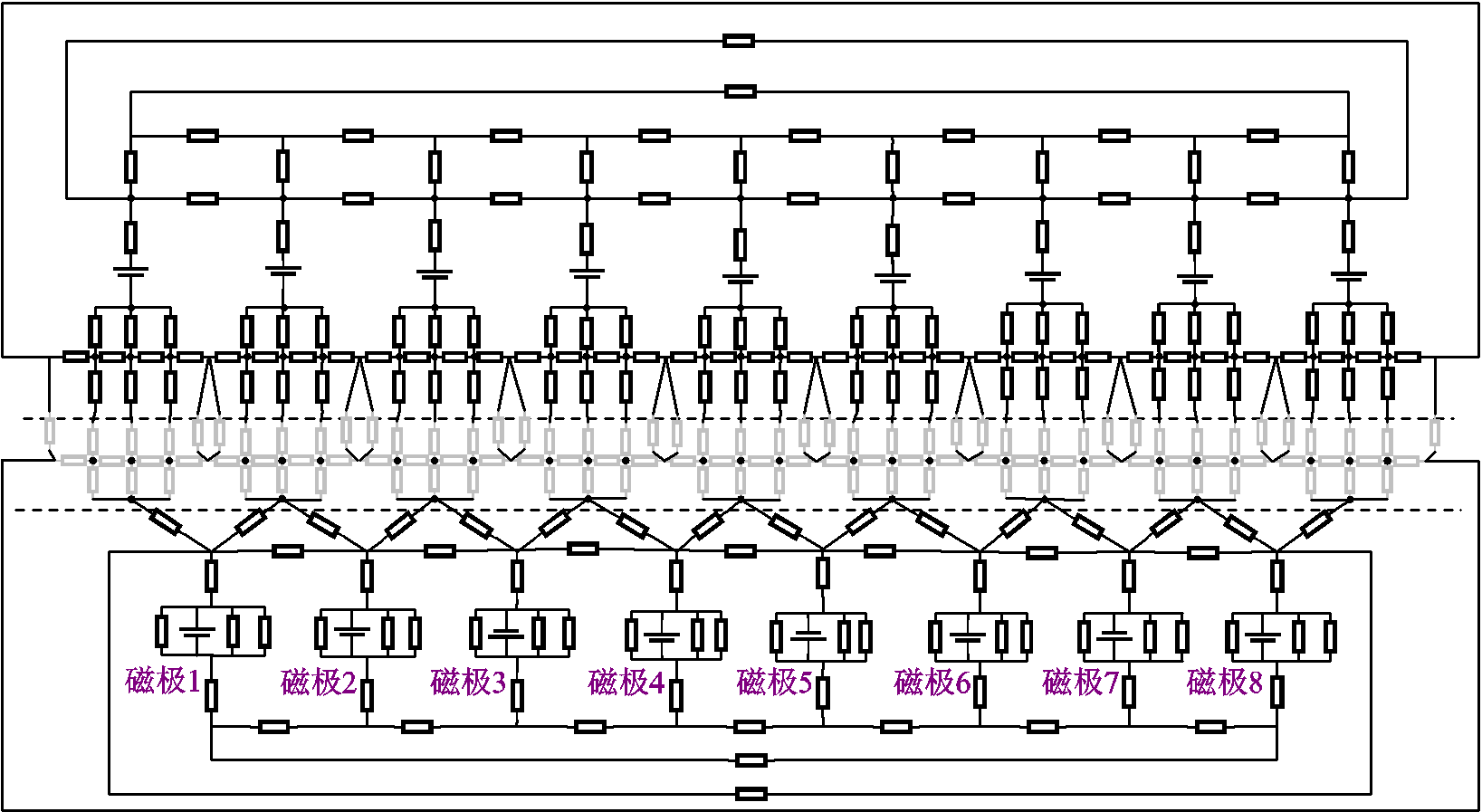
图12 单元电机的局部二维等效磁网络图
Fig.12 Local 2-D EMN diagram of unit motor
在得到磁动势矩阵F后,可求取磁导所对应的磁通密度B,计算式为
 (15)
(15)
式中,A为i与j两节点之间磁通经过的截面积。
求解得到磁通密度B后,假设所有磁导率的初始值,对铁磁材料的非线性B-H特征曲线进行插值得到相对磁导率μk,使用式(16)加快迭代循环的速度[13]。
 (16)
(16)
式中,p1=0.95,p2=0.05;μup为更新后的相对磁导率。
迭代计算的终止条件取决于所定义的误差μerror,当满足式(17)误差条件时,磁导率收敛。
 (17)
(17)
式中,μerror为所设定的误差值。
迭代计算过程如图13所示。当某个转子位置的迭代后,调整连接节点,更换新的转子位置进行迭代计算,直到完成一个周期,输出结果。

图13 迭代计算流程
Fig.13 Flowchart of the iterative calculation process
为了快速对新型模块化HESM进行磁场分析与电磁特性研究,建立了单元电机的三维FEA模型,如图14所示。HESM的主要参数见表1。

图14 有限元模型
Fig.14 Geometry model of 3-D FEA
表1 HESM的主要参数
Tab.1 Main parameters of the HESM
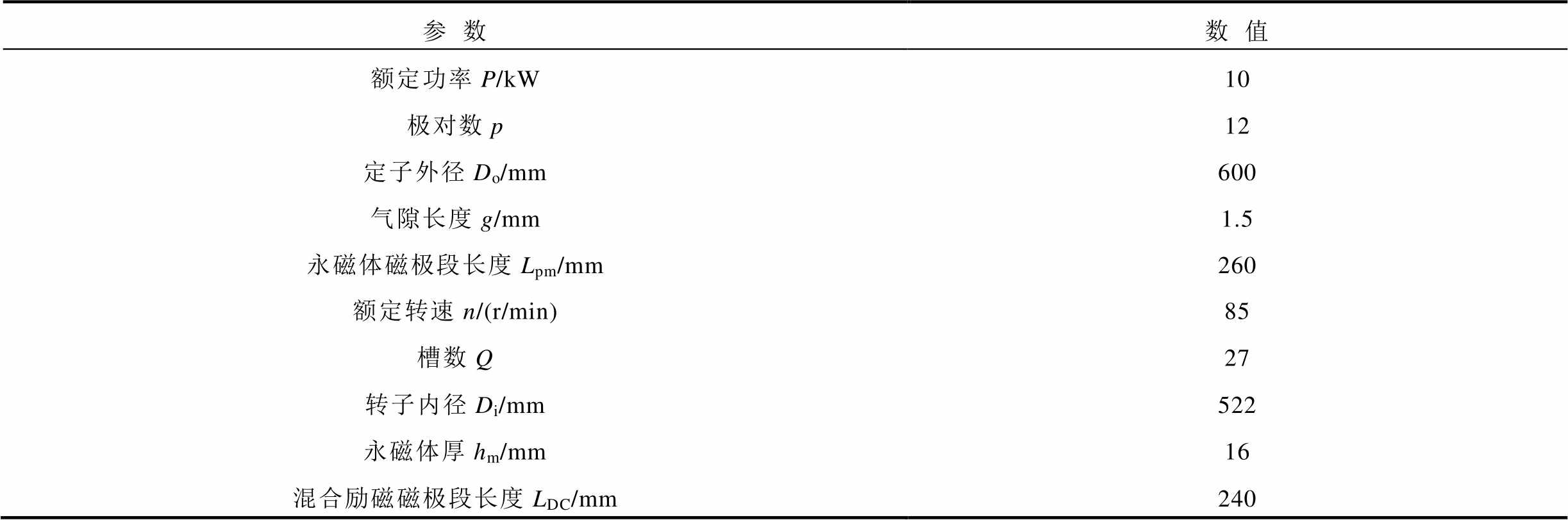
参数数值 额定功率P/kW10 极对数p12 定子外径Do/mm600 气隙长度g/mm1.5 永磁体磁极段长度Lpm/mm260 额定转速n/(r/min)85 槽数Q27 转子内径Di/mm522 永磁体厚hm/mm16 混合励磁磁极段长度LDC/mm240
图15展示了直流励磁磁动势为2 000A时去磁、无直流励磁和增磁状态下的三维气隙磁通密度分布。可以看出,直流励磁电流对永磁体区域的气隙磁通密度影响很小,而对铁磁极区域的气隙磁通密度影响很大。
为了验证模型的正确性,本文分别用考虑模块化定子齿和转子极靴不均匀饱和、漏磁前后的两种EMN模型,计算了三种状态下的空载气隙磁通密度,其对比结果如图16所示。为了区分两种模型的计算结果,将传统的EMN模型表示为EMN2,改进的EMN模型表示为EMN1。
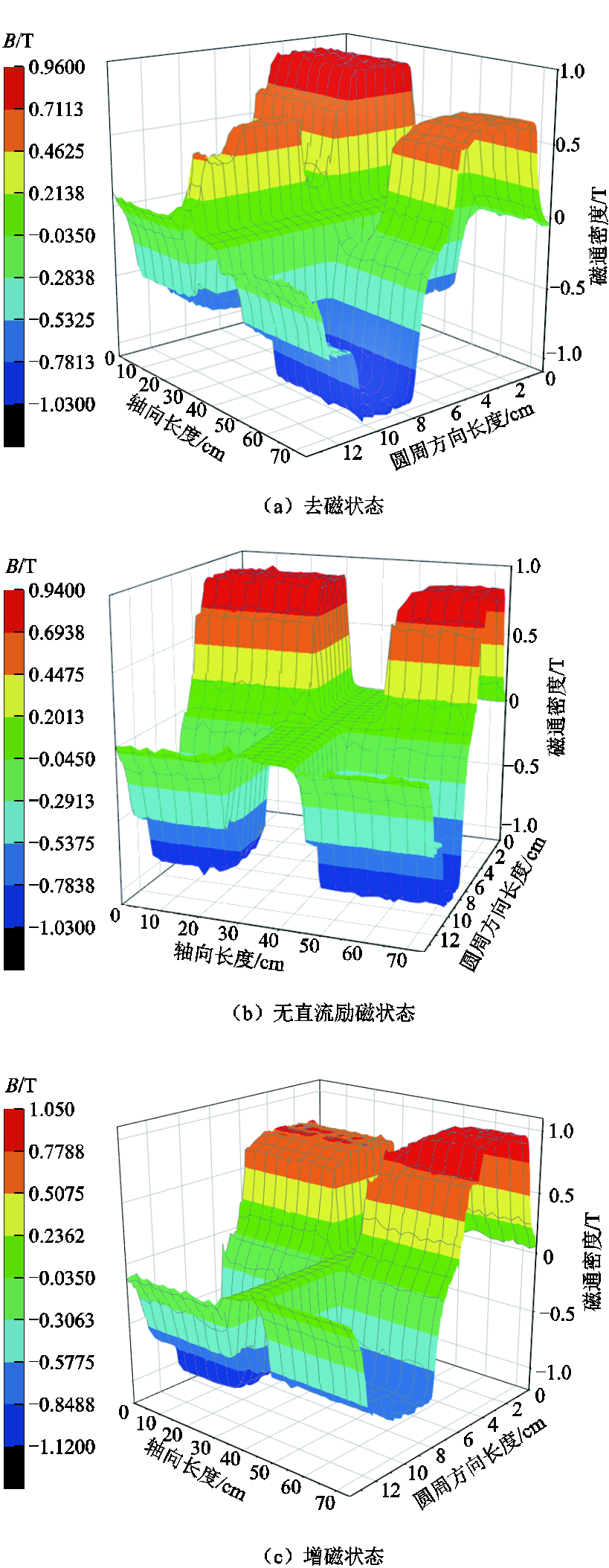
图15 三维气隙磁通密度图
Fig.15 3D air gap flux density map
可以看出,EMN2模型在气隙磁通密度波形幅值处的计算结果与FEA结果吻合较好,而在过零处和波形凹陷处的气隙磁通密度与FEA结果存在明显的偏差,见虚线框中。对于EMN1模型而言,整体气隙磁通密度波形与FEA结果吻合良好。为了对比两种磁网络和FEA结果的差别,利用式(18)进行EMN模型与FEA模型之间的误差比较。
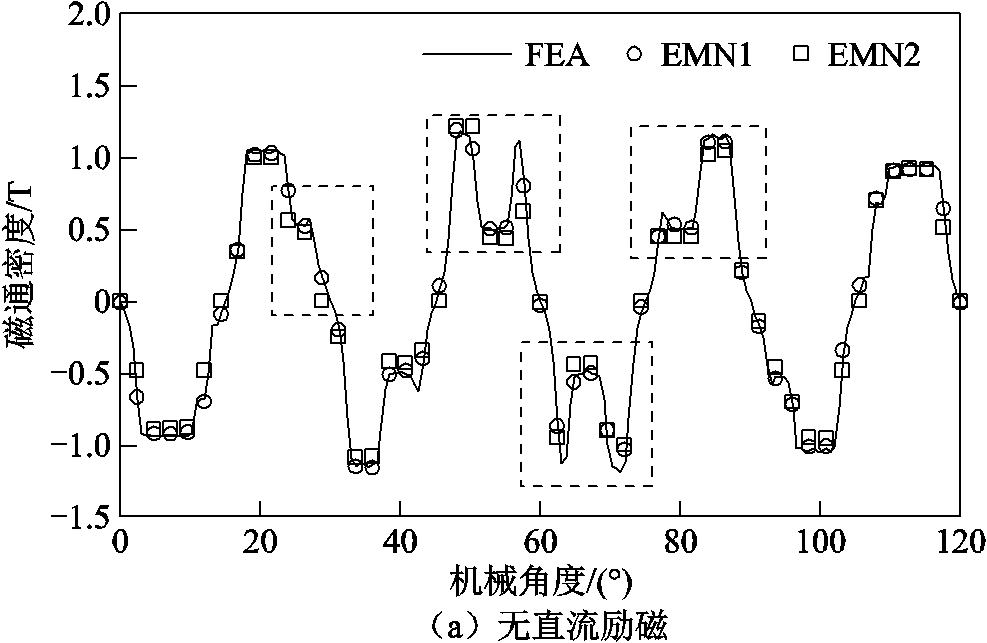
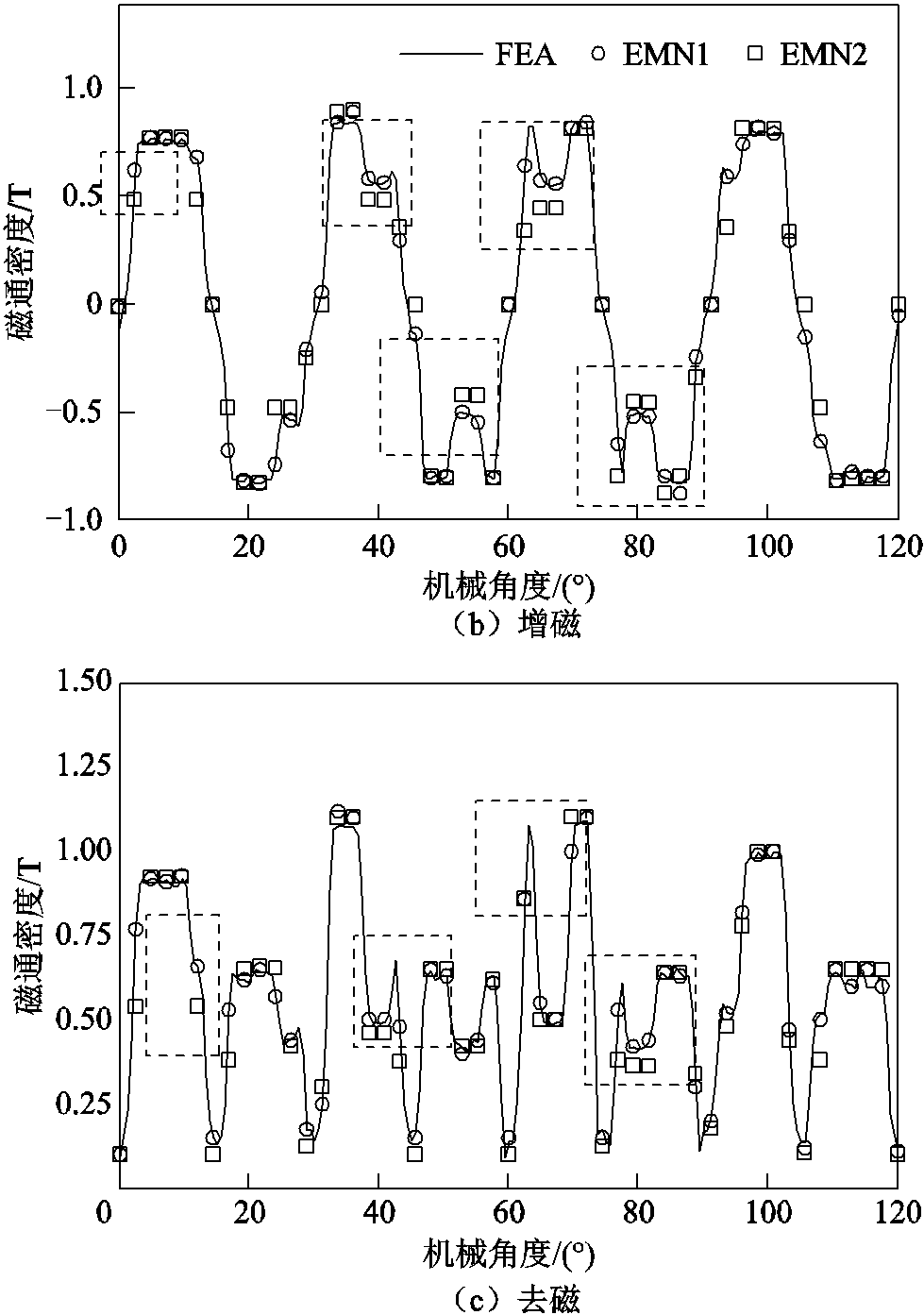
图16 气隙磁密对比情况
Fig.16 Air gap flux density comparison
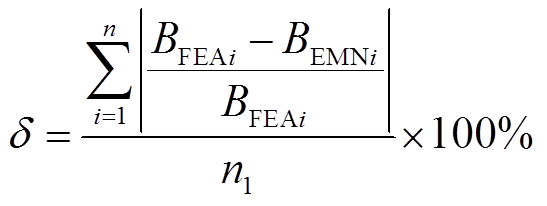 (18)
(18)
式中,d为所定义的计算误差;BEMNi为EMN模型第i个磁导处的气隙磁通密度值;BFEAi为与模型相同位置处第i个磁导的FEA计算磁通密度值;n1为EMN模型中的气隙磁导单元数目。
通过计算误差可以得到,EMN2模型在无直流、增磁和去磁三种状态下的误差分别为12.3%、12.9%、11.1%,而EMN1模型的误差分别为2.96%、2.38%、2.34%,证明了考虑模块化定子齿和转子极靴不均匀饱和以及漏磁的影响后,可以大幅提高EMN模型的计算精度。
磁链的计算公式为
 (19)
(19)
式中,Y为相磁链;N为该相绕组的匝数;Ra为气隙处半径;θ为转子的位置角;θa为一个线圈的节距角。
空载时,混合励磁磁极段的三种情况下磁链对比结果如图17a所示。当电枢电流为14.4A时,混合励磁磁极段的三种情况下磁链对比结果如图17b所示,可以看出改进的EMN模型与FEA计算结果基本一致。此外,还可以看出空载和负载时磁链曲线的幅值相近,这是因为电机的电枢反应起了较弱的去磁作用。
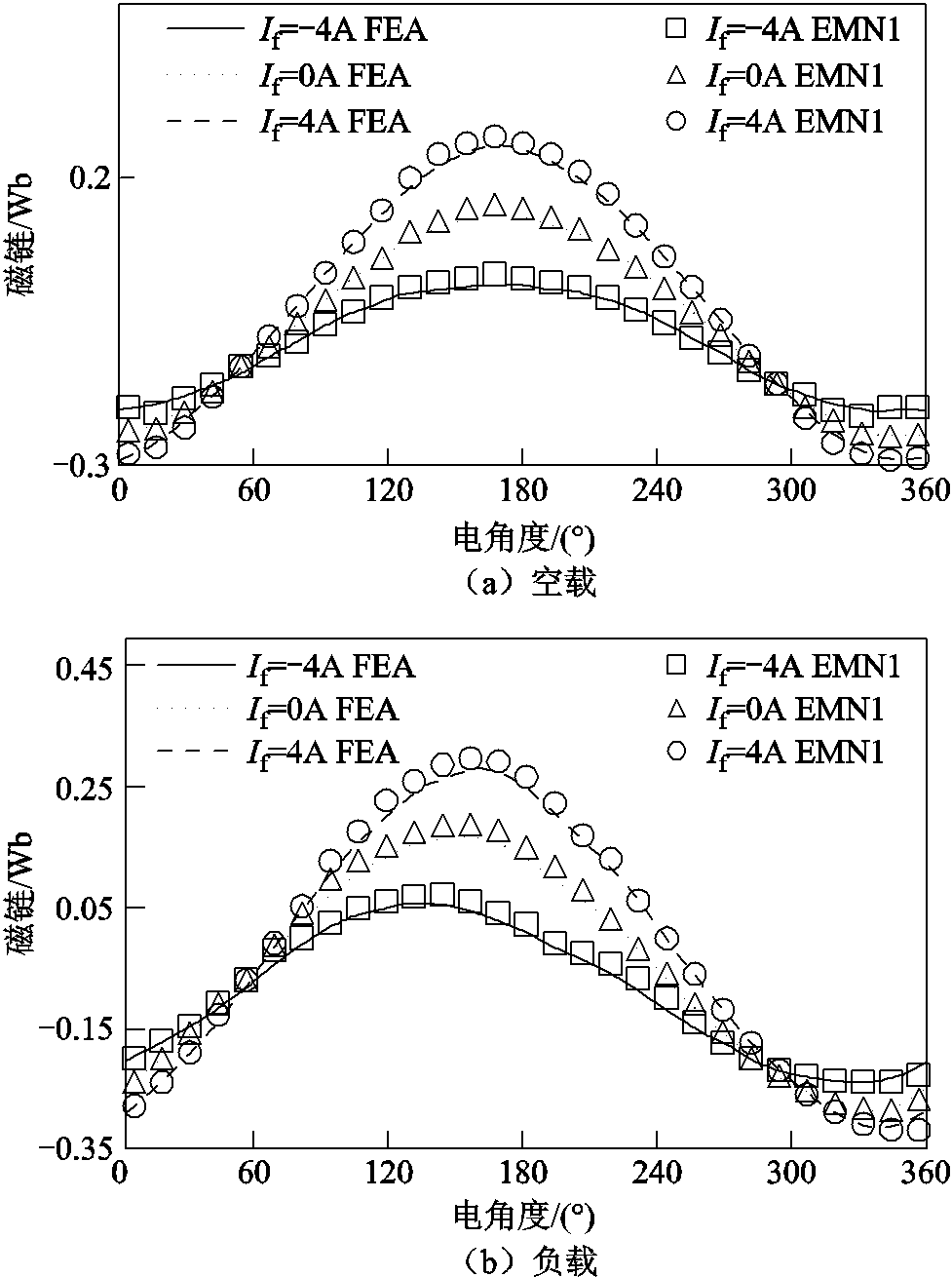
图17 空载和负载的磁链对比波形
Fig.17 No-load and on-load flux linkage waveforms
反电动势E可以根据上面计算得到的磁链获得,其计算公式为
 (20)
(20)
三种状态下的空载和负载反电动势波形分别如图18a和图18b所示。对比后发现,改进后的EMN模型和FEA的结果基本相同,对磁链的求导放大了误差,但仍在可接受范围,能够证明模型的准确性。
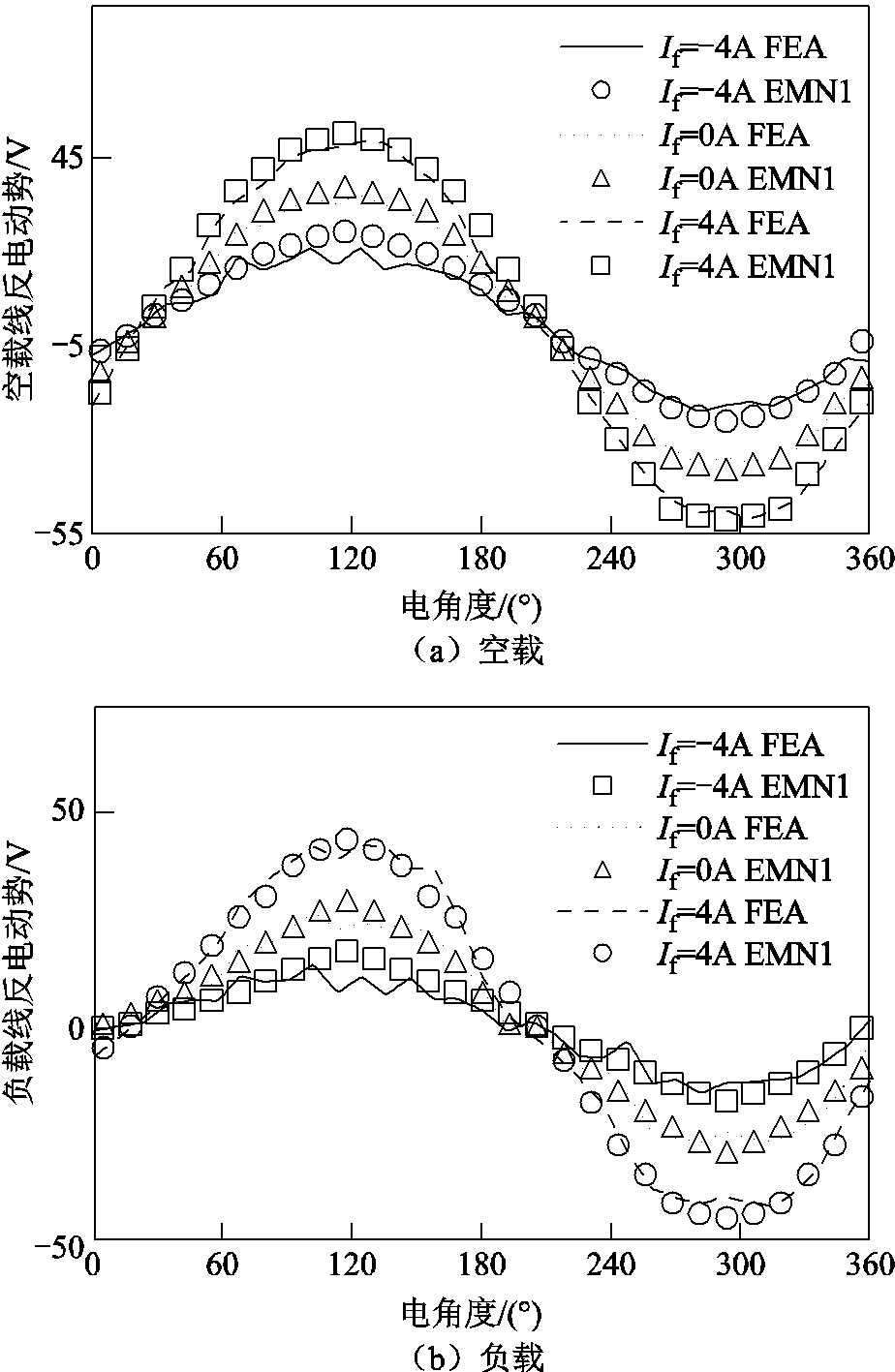
图18 空载和负载反电动势波形对比
Fig.18 No-load and on-load back-EMF waveforms
FEA和EMN模型的计算时间比较见表2。可以看出,EMN模型可以节省大量时间,满足精度的同时提高了计算效率,应用在电机的初期设计时更具有优势。
表2 计算时间比较
Tab.2 Comparison of calculation time

方法计算时间网格数计算机内存/GB计算机处理器 EMN9.7s3098Intel(R)3.20GHz FEA297min176 4328Intel(R)3.20GHz
为了进一步验证EMN模型的正确性,制造了一台10kW 24极/27槽的样机,并测试了该HESM的电磁特性。样机和实验测试平台如图19所示。
图20为不同励磁电流情况下,改进后的EMN模型与FEA和实验测试得到的反电动势有效值结果对比。可以看出,随着励磁电流的不断增大,三种方法的计算结果始终保持着相同的趋势,吻合度良好。

图19 样机与测试平台
Fig.19 Prototype structure and test platform
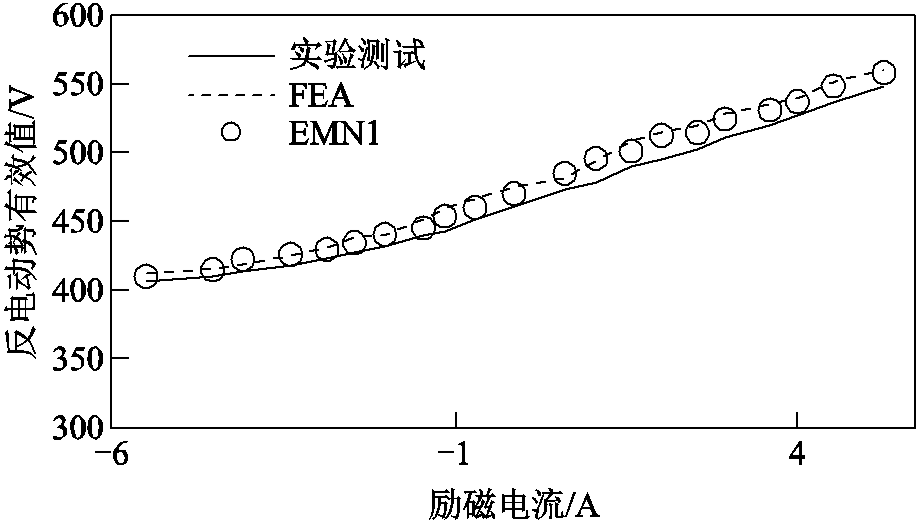
图20 不同励磁电流下反电动势有效值对比
Fig.20 Comparison of the effective value of back-EMF under different excitation currents
平均电磁转矩Tavg可以利用式(21)进行计算。
 (21)
(21)
式中,id为d轴电流;iq为q轴电流; 为d轴磁链;
为d轴磁链; 为q轴磁链;p为极对数;if为励磁电流;Mf为电枢绕组和励磁绕组的互感。
为q轴磁链;p为极对数;if为励磁电流;Mf为电枢绕组和励磁绕组的互感。
图21为改进后的EMN模型与FEA和实验得到的电磁转矩对比,可以看出模型计算结果和FEA与实验基本一致。
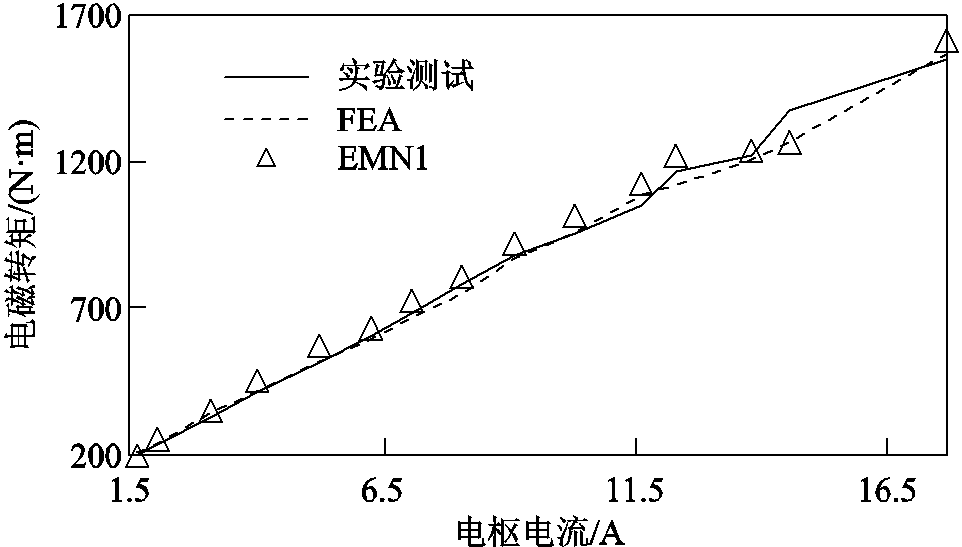
图21 不同电枢电流下电磁转矩对比
Fig.21 Comparison of electromagnetic torque under different armature currents
针对分析HESM电磁特性时,三维FEA建模困难、耗时长的问题,且现有的EMN建模方法不能满足新型模块化HESM的特殊结构,本文提出了一种能够充分考虑模块化定子齿和转子极靴的三维非线性动态EMN分析模型。该模型考虑了模块化定子齿和转子磁极的不均匀饱和,磁极间、磁极端部和定子槽内漏磁的影响,能够实现基本电磁特性的快速计算和调磁特性的初步分析。研究了电机在转动过程中,气隙等效磁阻的变化情况,建立了对应的等效气隙模型,提高了该模型动态分析的速度。
基于改进前后的EMN模型,计算了电机在三种工作情况下的气隙磁通密度分布,改进后的模型精度分别提高了9.34%、10.52%、8.76%,证明了考虑模块化定子齿和转子磁极不均匀饱和、漏磁的必要性。利用改进后的EMN模型,计算了磁链、反电动势和转矩。
最后,将三维EMN模型计算结果与三维FEA、样机实验结果进行比较,验证了该模型的快速性和有效性。精度较传统的EMN模型提高了大约9.5%,计算耗时仅为有限元的0.05%,为后续新型HESM的快速计算奠定了理论基础。
参考文献
[1] 朱孝勇, 程明, 赵文祥, 等. 混合励磁电机技术综述与发展展望[J]. 电工技术学报, 2008, 23(1): 30-39.
Zhu Xiaoyong, Cheng Ming, Zhao Wenxiang, et al. An overview of hybrid excited electric machine capable of field control[J]. Transactions of China Electrotechnical Society, 2008, 23(1): 30-39.
[2] 张卓然, 王东, 花为. 混合励磁电机结构原理、设计与运行控制技术综述及展望[J]. 中国电机工程学报, 2020, 40(24): 7834-7850.
Zhang Zhuoran, Wang Dong, Hua Wei. Overview of configuration, design and control technology of hybrid excitation machines[J]. Proceedings of the CSEE, 2020, 40(24): 7834-7850.
[3] 佟明昊, 程明, 许芷源, 等. 电动汽车用车载集成式充电系统若干关键技术问题及解决方案[J]. 电工技术学报, 2021, 36(24): 5125-5142.
Tong Minghao, Cheng Ming, Xu Zhiyuan, et al. Key issues and solutions of integrated on-board chargers for electric vehicles[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5125-5142.
[4] Ullah W, Khan F, Umair M. Design and optimization of segmented PM consequent pole hybrid excited flux switching machine for EV/HEV application[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(3): 206-214.
[5] 戴理韬, 高剑, 黄守道, 等. 变速恒频水力发电技术及其发展[J]. 电力系统自动化, 2020, 44(24): 169-177.
Dai Litao, Gao Jian, Huang Shoudao, et al. Variable-speed constant-frequency hydropower generation technology and its development[J]. Automation of Electric Power Systems, 2020, 44(24): 169-177.
[6] 姚钢, 杨浩猛, 周荔丹, 等. 大容量海上风电机组发展现状及关键技术[J]. 电力系统自动化, 2021, 45(21): 33-47.
Yao Gang, Yang Haomeng, Zhou Lidan, et al. Development status and key technologies of large-capacity offshore wind turbines[J]. Automation of Electric Power Systems, 2021, 45(21): 33-47.
[7] 卢浩, 杜怿, 刘新波, 等. 磁场调制型双馈无刷混合励磁电机及其静态性能分析[J]. 电工技术学报, 2020, 35(14): 2969-2978.
Lu Hao, Du Yi, Liu Xinbo, et al. Static performance analysis of magnetic field-modulated doubly-fed brushless hybrid excitation motor[J]. Transactions of China Electrotechnical Society, 2020, 35(14): 2969-2978.
[8] Liu Ye, Zhang Zhuoran, Wang Chen, et al. Electromagnetic performance analysis of a new hybrid excitation synchronous machine for electric vehicle applications[J]. IEEE Transactions on Magnetics, 2018, 54(11): 1-4.
[9] Bali H, Amara Y, Barakat G, et al. Analytical modeling of open circuit magnetic field in wound field and series double excitation synchronous machines[J]. IEEE Transactions on Magnetics, 2010, 46(10): 3802-3815.
[10] Hsieh M F, Hsu Y C. A generalized magnetic circuit modeling approach for design of surface permanent-magnet machines[J]. IEEE Transactions on Industrial Electronics, 2012, 59(2): 779-792.
[11] Liu Guohai, Wang Yong, Chen Qian, et al. Design and analysis of a new equivalent magnetic network model for IPM machines[J]. IEEE Transactions on Magnetics, 2020, 56(6): 1-12.
[12] 郭凯凯, 郭有光. 磁通反向直线旋转永磁电机三维非线性等效磁路模型分析[J]. 电工技术学报, 2020, 35(20): 4278-4286.
Guo Kaikai, Guo Youguang. 3D nonlinear equivalent magnetic circuit model analysis of a flux reversal linear rotary permanent magnet machine[J]. Transactions of China Electrotechnical Society, 2020, 35(20): 4278-4286.
[13] Tong Wenming, Wang Shuai, Dai Shanhong, et al. A quasi-three-dimensional magnetic equivalent circuit model of a double-sided axial flux permanent magnet machine considering local saturation[J]. IEEE Transactions on Energy Conversion, 2018, 33(4): 2163-2173.
[14] 赵玫, 于帅, 张华强. 聚磁式横向磁通永磁直线电机的变磁导等效磁网络[J]. 电机与控制学报, 2020, 24(4): 12-22.
Zhao Mei, Yu Shuai, Zhang Huaqiang. Variable permeability equivalent magnetic circuit network of flux-concentrated transverse flux permanent magnet linear machine[J]. Electric Machines and Control, 2020, 24(4): 12-22.
[15] 徐衍亮, 吴巧变, 宫晓. 新型盘式横向磁通永磁无刷电机的变网络等效磁路模型[J]. 电工技术学报, 2016, 31(17): 147-153.
Xu Yanliang, Wu Qiaobian, Gong Xiao. Network-varying equivalent magnetic circuit modeling of novel disk transverse-flux permanent magnet brushless machine[J]. Transactions of China Electrotechnical Society, 2016, 31(17): 147-153.
[16] 张昌锦, 陈志辉, 梅庆枭, 等. 横向磁通永磁同步电机非线性动态等效磁网络模型分析[J]. 中国电机工程学报, 2019, 39(1): 307-314, 345.
Zhang Changjin, Chen Zhihui, Mei Qingxiao, et al. Nonlinear dynamic equivalent magnetic network model analysis of transverse flux permanent magnet synchronous motor[J]. Proceedings of the CSEE, 2019, 39(1): 307-314, 345.
[17] 叶品州, 李红伟, 于文涛, 等. 考虑材料非线性及涡流影响的径向电磁轴承等效磁路建模[J]. 电工技术学报, 2020, 35(9): 1858-1867.
Ye Pinzhou, Li Hongwei, Yu Wentao, et al. Equivalent magnetic circuit modeling of radial active magnetic bearing considering material nonlinearity and eddy current effects[J]. Transactions of China Electrotechnical Society, 2020, 35(9): 1858-1867.
[18] 禹春敏, 邓智泉, 梅磊, 等. 基于精确磁路的新型混合型轴向-径向磁悬浮轴承研究[J]. 电工技术学报, 2021, 36(6): 1219-1228.
Yu Chunmin, Deng Zhiquan, Mei Lei, et al. Research of new hybrid axial-radial magnetic bearing based on accurate magnetic circuit[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1219-1228.
[19] Hua Wei, Zhang Gan, Cheng Ming, et al. Electromagnetic performance analysis of hybrid-excited flux-switching machines by a nonlinear magnetic network model[J]. IEEE Transactions on Magnetics, 2011, 47(10): 3216-3219.
[20] Liu Ye, Zhang Zhuoran, Geng Weiwei, et al. A simplified finite-element model of hybrid excitation synchronous machines with radial/axial flux paths via magnetic equivalent circuit[J]. IEEE Transactions on Magnetics, 2017, 53(11): 1-4.
[21] Nedjar B, Hlioui S, Vido L, et al. Hybrid Excitation Synchronous Machine modeling using magnetic equivalent circuits[C]//2011 International Conference on Electrical Machines and Systems, Beijing, China, 2011: 1-6.
[22] Zhu Changqing, Wang Xiuhe, Zhao Wenliang, et al. Performance analysis on a surface-mounted permanent magnet synchronous generator with hybrid excitation based on equivalent magnetic circuit[C]//2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 2019: 1-5.
[23] Hou Jining, Geng Weiwei, Li Qiang, et al. 3-D equivalent magnetic network modeling and FEA verification of a novel axial-flux hybrid-excitation in-wheel motor[J]. IEEE Transactions on Magnetics, 2021, 57(7): 1-12.
[24] 黄允凯, 周涛. 基于等效磁路法的轴向永磁电机效率优化设计[J]. 电工技术学报, 2015, 30(2): 73-79.
Huang Yunkai, Zhou Tao. Efficiency optimization design of axial flux permanent magnet machines using magnetic equivalent circuit[J]. Transactions of China Electrotechnical Society, 2015, 30(2): 73-79.
Abstract Hybrid excitation synchronous machines (HESM), due to the advantages of convenient air gap magnetic field regulation, high torque density and high efficiency, are widely used in industrial applications, new energy transportation equipment and power generation. The three-dimensional (3D)finite element analysis (FEA) is widely used in machine design due to the ability to consider saturation and complex geometries. However, it is time-consuming due to the need for high-precision mesh. The analytical method based on Laplace-Poisson equation is one of the effective tools to quickly obtain the machines performance, but it is difficult to consider the influence of core saturation, which will reduce the calculation accuracy. In order to achieve balance between calculation accuracy and calculation time, this paper proposes an improved 3D nonlinear dynamic equivalentic magnetic network(EMN) model to predict the electromagnetic characteristics and magnetic modulation capability of the HESM.
Firstly, the topology of HESM with modularized stator and rotor structure is introduced, and the axial, tangential and radial equivalent permeances in the motor are analyzed. Secondly, based on the magnetic flux tube theory, the 3D EMN model of the HESM is established considering the influence of non-uniform saturation of modular stator teeth and rotor pole shoes, flux leakage between magnetic poles, end flux leakage and the flux leakage in stator slots. Finally, the change laws of the equivalent permeances of the air gap during the machine rotation is studied, and the corresponding equivalent air gap permeance model is established to improve the speed of EMN dynamic analysis. Compared with the traditional 3D EMN model, the proposed 3D EMN model can further improve the calculation accuracy while ensuring the calculation speed for the HESM.
The calculated air-gap flux density waveforms, flux linkage waveforms, back electro motive force (EMF) and torque by the proposed 3D EMN model are compared with FEA and experimental results. For the three states of no excitation current, magnetizing and demagnetizing, the air gap flux density errors calculated by the proposed 3D EMN model are 2.96%、2.38%、2.34% respectively, which is greatly reduced compared with the traditional 3D EMN model. The improvement of the calculation accuracy proves the effectiveness of the improved EMN model by taking into account the influence of non-uniform saturation and flux leakages. The flux linkage waveforms and back EMF waveforms calculated by the model under no-load and load conditions are also in good agreement with FEA results, and the calculation errors are within the acceptable ranges. The electromagnetic torques calculated by the proposed 3D EMN model under different armature currents is basically consistent with the experimental and FEA results, which also shows the validity of the proposed model. In addition, the calculation time of the proposed 3D EMN model is only 0.05% of that of the FEA.
The following conclusions can be drawn from the above analysis: ①Compared with traditional 3D EMN, the calculation accuracy of the proposed 3D EMN model is improved by about 9.5% due to the consideration of non-uniform saturation of modular stator teeth/rotor pole shoes, and end flux leakage between magnetic poles. ②Compared with FEA, the proposed 3D EMN model has shorter calculation time while ensuring calculation accuracy, since the number of nodes divided in the proposed model is far less than FEA. ③The proposed modelis universal for HESM, which bring convenience to the design and optimization of related types of motors.
keywords:Hybrid excitation synchronous machines, 3D equivalent magnetic network model, 3D finite-element analysis, electromagnetic performance analysis
DOI: 10.19595/j.cnki.1000-6753.tces.211647
中图分类号:TM351
国家自然科学基金(51677122,51907129)和霍英东教育基金会青年教师基金(171049)资助项目。
收稿日期 2021-10-15
改稿日期 2021-11-23
佟文明 男,1984年生,教授,博士生导师,研究方向为特种电机及其控制与电机多物理场仿真分析。E-mail:twm822@126.com(通信作者)
王 萍 男,1997年生,硕士研究生,研究方向为混合励磁同步电机等效磁网络模型及其控制策略。E-mail:wangping@smail.sut.edu.cn
(编辑 郭丽军)