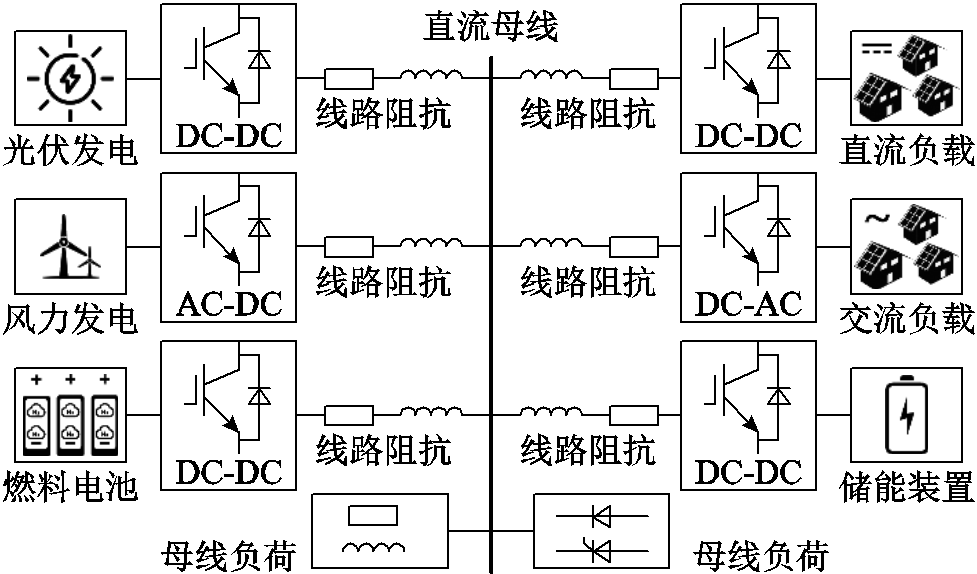
图1 直流微电网常见结构
Fig.1 The common diagram of DC microgrids
摘要 基于一致性算法的直流微电网协同控制仅需相邻分布式电源的关键运行信息,即可实现全局电压调节和功率按容分配,是微电网控制的有效手段。然而,现有方案消耗大量通信资源且控制环节设计繁杂,限制了其应用。针对上述问题,该文提出一种集成式协同控制策略,将电压调节器和电流调节器集成为一体,降低了系统的通信依赖,简单有效地实现了控制目标。在此基础上,采用改进一致性算法,使得系统对测量噪声及初始化条件具有强鲁棒性。考虑到高开环增益下系统不稳定与低开环增益下控制性能欠佳这一矛盾,进一步提出一种双曲正切-比例非线性控制器,扩大了参数选择范围,提升了系统控制品质。此外,建立直流微电网状态空间的全局模型,证明了系统的输入-状态稳定性,并阐明了控制器参数对系统稳定性的影响。最后,通过硬件在环实验,对所提方法进行了多工况测试。结果表明,所提方法可在保证系统“即插即用”能力的前提下,实现高品质的电压调节和功率分配。
关键词:直流微电网 分布式协同控制 分布式发电 一致性算法 非线性控制
随着能源和环境问题日趋严峻,构建清洁低碳安全高效的能源体系和新能源占比逐渐提高的新型电力系统成为学术界和工业界的研究热点[1]。然而新能源出力的天然波动性和新能源并网的低惯量性也为电网的经济、可靠运行带来了巨大挑战[2-3]。针对上述问题,微电网作为一个有效的解决方案应运而生。
微电网是指由分布式电源、储能装置、能量转换装置、负荷、监控和保护装置等组成的小型发配电系统。其中直流微电网因其运行效率高,且不存在变压器励磁涌流、频率同步、电能质量等问题[4],逐渐得到了更多的关注。常见的直流微电网系统结构图如图1所示。
直流微电网的控制目标主要为:高精度电压调节和各电源功率按容分配[5]。前者有利于维持微电网的正常运行,后者有利于实现各单元的出力优化。为了满足上述控制目标,微电网的分层控制体系被广泛应用。在该体系中常见的三种实现方式分别为集中式控制、分散式控制和分布式控制[6-8]。其中分布式控制无需中心控制器,仅利用系统局部信息对本地施加控制指令。该方法既不依赖全局系统的中心控制器,又可实现各单元的“即插即用”,同时还能保证系统较高的控制精度,兼具集中式控制和分散式控制的优点。
图1 直流微电网常见结构
Fig.1 The common diagram of DC microgrids
经过多年以来的研究探索,分布式控制已在无人机编队控制、通信网络拥塞控制等领域崭露头角,具有重要科学价值和实际推广价值。文献[9]对微电网中的分布式协同控制方法进行综述,对比分析了分布式控制方法的优势,总结了其在微电网应用中的研究现状,指出该研究领域亟须解决的问题和未来发展方向。其中,基于多智能体一致性算法的微电网分布式协同控制策略得到了广泛的研究[10-13]。
文献[10]主要研究内容为微电网多源的协同控制,通过分析得出直流微电网均流、调压控制的本质在于寻找目标虚拟阻抗,其利用一致性算法更新下垂控制中的虚拟阻抗大小,并深入分析了通信延时对系统的影响。文献[11]研究电池储能设备荷电状态的一致性控制,其将荷电状态作为控制器输入量,实时调节储能单元的输出功率,促使各单元荷电状态趋于一致。文献[12]研究微电网的运行成本协同优化,每个单元利用一致性算法根据相邻节点的运行成本信息,产生本地的功率参考,并对本地变流器施加控制。文献[13]探索了双极型直流微电网的协同控制策略,针对由于负荷变化而引起的正负极电压不平衡,根据一致性理论,在下垂控制方程中添加不平衡度辅助项,实现了极间电压不平衡度的一致性。上述成果从不同研究对象出发,完善或拓展了直流微电网的协同控制策略。
然而,经过国内外学者的多年探索,文献[14]中提出的方法被认为是直流微电网中经典分布式协同控制策略之一,对该领域内绝大部分研究工作产生了深远的影响。其采用一种基于动态一致性算法的电压观测器来估计平均电压,电压调节器通过该估计值与额定值之差生成电压校正项。除此之外,每个分布式电源的本地电流和相邻电源的输出电流作差后求和,通过电流调节器生成电流校正项。最终系统通过两个校正项动态地调整本地电压设定点。
相较于其他策略,该方法中每个控制量都有较为直观的物理概念,因此其控制系统设计思路更清晰。然而,上述方案仍存在以下三点问题:
1)该方法需要各分布式节点每个周期由通信网络同时得到相邻分布式电源的电压和电流信息,其较高的数据吞吐量对通信线路带宽要求较高,提高了实际工程应用中通信系统的构建成本,且不利于微电网系统的节点扩展。
2)该方法中为分别实现均压和均流的控制目标,使用了两个PI控制器。然而均压PI控制器与均流PI控制器之间存在复杂的耦合关系,为取得最优控制品质,需要进行大量且繁琐的参数整定工作。
3)该方法中电压观测器采用的一致性算法需遵循初始化条件,当节点自由进入或退出,初始化条件遭到破坏,从而引起观测误差,降低控制品质。
因此,需要一种低通信依赖的、可“即插即用”的分布式协同控制策略来实现直流微电网的高品质运行。
本文提出了一种直流微电网集成式高品质协同控制策略,主要完成了以下工作:①提出了一种具有强鲁棒性的电压观测器,解决了对测量信号噪声敏感的问题,无需任何初始化条件,保证了系统良好的“即插即用”特性;②提出了将电压和电流调节器集成为一体的协同控制策略,仅需相邻单元的电压信息便可实现全局控制目标,降低了通信量并简化了控制回路;③提出了一种双曲正切-比例非线性控制器,保证了所提方法中比例系数具有较宽的选择范围,可在系统稳定运行的前提下,进一步取得高品质控制效果;④对所提方法进行了输入-状态稳定性证明,阐明了控制器系数对全局稳定性的影响,并通过硬件在环(Hardware-in-Loop, HiL)实验平台,证明了所提方法在多种工况下的有效性。
针对文献[14]存在的问题,本文提出一种集成式协同控制策略。
多智能体系统是由一群具备一定感知、通信、计算和执行能力的智能体通过通信等方式关联成的一个复杂网络系统[15]。而一致性算法是多智能体系统的信息交互、计算等过程中常见方法之一。微电网本身为多个分布式电源的集群系统,各个运行单元均可视为智能体单元,各单元之间通过通信网络交换电压和功率信息。
对于一个包含 个单元的直流微电网系统,其通信网络拓扑结构可以用一个无向或有向图
个单元的直流微电网系统,其通信网络拓扑结构可以用一个无向或有向图 来表示。在本文研究的直流微电网中,每个单元之间均可以相互通信,因此为无向图。如图2即为包含有个节点的无向图,其中设定
来表示。在本文研究的直流微电网中,每个单元之间均可以相互通信,因此为无向图。如图2即为包含有个节点的无向图,其中设定 为节点集合,
为节点集合, 为图边集合。若节点
为图边集合。若节点 可以传递信息给节点
可以传递信息给节点 ,则
,则 ,考虑到本文所研究的为无向图,则等价于
,考虑到本文所研究的为无向图,则等价于 。所以,假设,即可认为节点与节点在通信拓扑上相邻。
。所以,假设,即可认为节点与节点在通信拓扑上相邻。
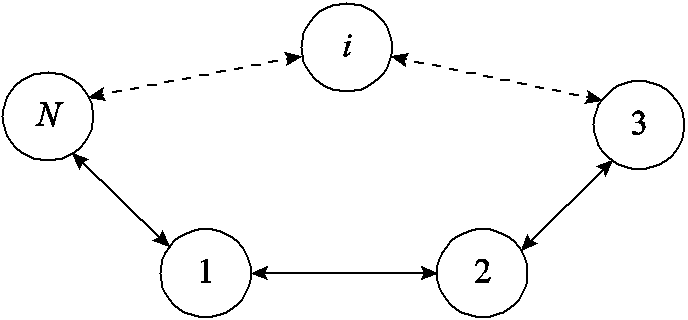
图2 包含N个节点的无向图
Fig.2 An undirected graph containing N nodes
为了更好地表示直流微电网内的通信连接关系,需定义如下三个矩阵,作为一致性算法的基础。
1)定义 阶邻接矩阵
阶邻接矩阵 表示节点之间的通信权重,若,则
表示节点之间的通信权重,若,则 ,否则
,否则 。
。
2)定义阶的度矩阵 表示每个节点连接到它的边的个数,因此度矩阵为对角阵。
表示每个节点连接到它的边的个数,因此度矩阵为对角阵。
3)定义拉普拉斯矩阵 为
为
 (1)
(1)
矩阵与信息交互结构相关,表征节点之间的通信强度。值得一提的是,矩阵中各行元素相加为0,因此其必定具有一个特征值为0。
在多智能体一致性算法中,可以分为平均一致性、最大一致性、最小一致性及跟随一致性等,分别对应不同的系统最终状态[16]。
针对本文所研究的孤岛直流微电网协同控制目标,最理想状态是每个单元的输出电压全部稳定跟随额定值,然而各分布式电源之间要存在功率的交互必定要求每个单元间存在电压差。因此这里采用平均一致性算法,将电压观测器得出的平均电压作为控制目标,其中对应的系统估计状态 为
为
 (2)
(2)
式中, 为单元i电压观测器的输入变量;N为单元数量。因此最终系统状态会收敛于各单元输入变量的平均值。文献[14]中采用了经典的动态一致性算法,有
为单元i电压观测器的输入变量;N为单元数量。因此最终系统状态会收敛于各单元输入变量的平均值。文献[14]中采用了经典的动态一致性算法,有
 (3)
(3)
式中, 为节点观测到的平均电压值
为节点观测到的平均电压值 ;为节点本地的输出电压值
;为节点本地的输出电压值 ;
; ;Ni为与节点i相邻节点的集合。
;Ni为与节点i相邻节点的集合。
令 和
和 ,式(3)可以写成矩阵形式,即
,式(3)可以写成矩阵形式,即
 (4)
(4)
由式(3)可知,一致性算法是完全分布式的控制方法,每个单元仅需与邻居节点交换观测得到的平均电压,便可以实现各个节点电压收敛至平均值。
基于式(3)的分布式控制方法虽已取得良好的控制效果,但还存在以下两方面问题。
1)式(3)中存在的 是输入电压的微分项,微分对测量噪声的高频分量具有放大作用,因此该公式对测量噪声敏感。
是输入电压的微分项,微分对测量噪声的高频分量具有放大作用,因此该公式对测量噪声敏感。
2)式(3)需满足初始化条件
 (5)
(5)
然而,当任意节点进入或离开系统,将会破坏该条件,引起电压观测器的观测误差,难以保证“即插即用”特性。
为克服上述两方面问题,本文采用一种改进动态一致性算法[17],即
 (6)
(6)
 (7)
(7)
 (8)
(8)
式中,a为电压观测器系数, 。该算法可保证各节点观测值渐近收敛至输入项的平均值,附录中证明1对该算法的收敛性进行了说明。此外,由式(6)可得,该算法直接避免了输入信号微分项的存在,解决了对测量噪声敏感的问题,而同时该算法中额外积分项的存在带来了对初始条件的鲁棒性。在4.1节中,测试了改进的一致性算法对输入信号噪声和初始化条件的鲁棒性。
。该算法可保证各节点观测值渐近收敛至输入项的平均值,附录中证明1对该算法的收敛性进行了说明。此外,由式(6)可得,该算法直接避免了输入信号微分项的存在,解决了对测量噪声敏感的问题,而同时该算法中额外积分项的存在带来了对初始条件的鲁棒性。在4.1节中,测试了改进的一致性算法对输入信号噪声和初始化条件的鲁棒性。
除此之外,此改进算法还引入了两个邻接系数,分别为 和
和 ,定义
,定义 和
和 分别为邻接矩阵
分别为邻接矩阵 和
和 所对应的拉普拉斯矩阵,其中称为比例拉普拉斯矩阵,称为积分拉普拉斯矩阵。因此该算法相较于经典一致性算法拥有额外自由度去调整收敛性能。根据图论原理,可以写出对应矩阵形式为
所对应的拉普拉斯矩阵,其中称为比例拉普拉斯矩阵,称为积分拉普拉斯矩阵。因此该算法相较于经典一致性算法拥有额外自由度去调整收敛性能。根据图论原理,可以写出对应矩阵形式为
 (9)
(9)
 (10)
(10)
 (11)
(11)
式中
本文所提方法与文献[14]相比,只包含电压观测器和电压调节器两个主要部分,不需要电流调节器的存在,即消除了对邻居节点电流信息的需求。以节点为例,控制框图如图3所示。
首先,额定电压 和第个节点观测得到的平均电压
和第个节点观测得到的平均电压 之差与比例环节
之差与比例环节 相乘后得到
相乘后得到 表达式为
表达式为
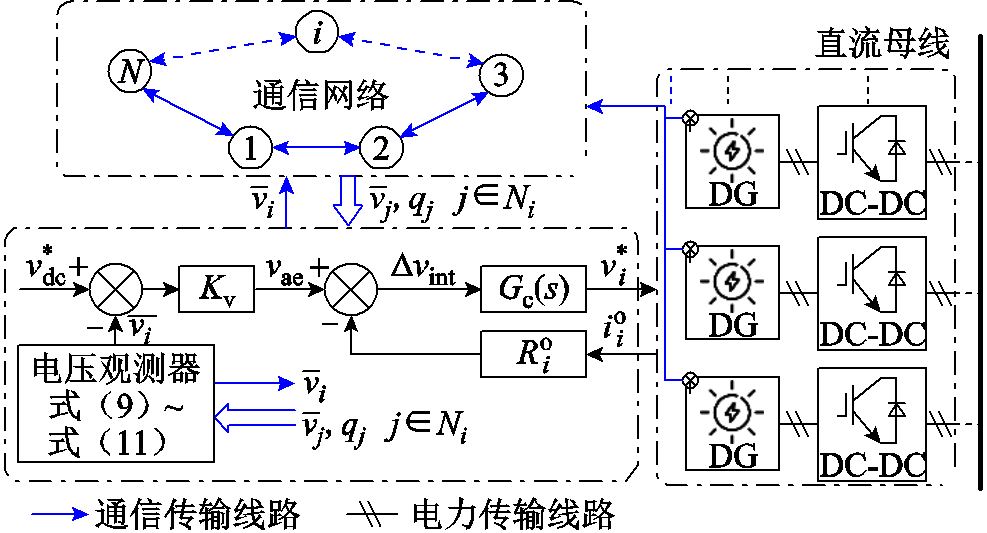
图3 集成式直流微电网协同控制框图
Fig.3 The integrated distributed control schematic diagram of DC microgrids
 (12)
(12)
式中,为比例控制器系数。
定义虚拟压降为 ,之后与之差送入
,之后与之差送入 调节器,其中设计为
调节器,其中设计为
 (13)
(13)
最后,可以得到变换器的动态电压参考值为
 (14)
(14)
其中,的频域特性类似于积分环节,可以做到消除和之间的误差,即在系统处于稳态情况下,认为 ,即
,即 。因此由式(12)得
。因此由式(12)得
 (15)
(15)
对于稳定状态下的系统,所有节点的观测值均达成一致,即 。所有节点取值均相同的情况下,式(15)的分子均为一个相同的常数,可得
。所有节点取值均相同的情况下,式(15)的分子均为一个相同的常数,可得
 (16)
(16)
对此,写为对应的容量比形式,即
 (17)
(17)
式中, 与
与 分别为、节点容量。因此只需要按预设的容量反比设定
分别为、节点容量。因此只需要按预设的容量反比设定 与
与 的比值,就可以完成功率的按容分配。
的比值,就可以完成功率的按容分配。
值得一提的是,所提方法中 送入调节器后,直接生成了电压参考值
送入调节器后,直接生成了电压参考值 给到本地物理层。因此,所提方法允许灵活接入不同的一次控制策略。
给到本地物理层。因此,所提方法允许灵活接入不同的一次控制策略。
至此,所提方法的电压调节和功率共享是按集成为一体的方式同时实现的。只使用了作为本地反馈项,而不是使用两个单独的电压和电流调节器,避免了在工程使用中复杂的参数设计环节,有效地简化了控制系统的设计。
如图3所示,所提方法采用了基于式(9)~式(11)的电压观测器,其额外带来了节点对邻居节点 信息的需求。需要补充说明的是,若所提的集成式协同控制策略采用与文献[14]中相同的电压观测器,则只需要邻居节点的电压信息。换而言之,对信息的需求并非由所提协同控制方法造成的。
信息的需求。需要补充说明的是,若所提的集成式协同控制策略采用与文献[14]中相同的电压观测器,则只需要邻居节点的电压信息。换而言之,对信息的需求并非由所提协同控制方法造成的。
因此,在采用相同电压观测器的前提下,所提的集成式协同控制方法相较于经典控制方法无需邻居节点电流信息,降低了对通信带宽的要求,提高了系统运行可靠性,减小了实际工程应用中通信系统构建的成本。而改进的电压观测器仅作为一种高品质控制效果的实现手段,额外赋予了系统对测量噪声及初始化条件的强鲁棒性。
上述方案在仅需邻居节点电压信息的前提下,实现了电压调节与功率按容分配,降低了与邻居节点的通信消耗,方案简单可靠有效。
然而由于PI控制器中的积分项依赖历史输入数据,若控制外环采用PI控制器,则需要在有分布式节点离开或接入时全部节点复位积分项。这种方式虽可以有效地保证“即插即用”特性,但其需要将复位信号同时同步地给到各节点,否则仍会导致观测误差存在。考虑到通信延时等因素,这一点在实际工程应用中难以实现。
此外,该方法还需要中心控制器检测各节点接入或退出状态,以此向各节点发出同步复位信号,这种方式破坏了所提策略完全分布式的控制架构。存在单点故障的问题,系统可靠性差。
因此本文工作中外环电压调节器不采用PI控制器,而选择了比例控制器,但比例环节的使用会给电压调节带来误差。可将式(15)改写为
 (18)
(18)
可见电压调节误差中比例系数出现在分母项中,因此只要使得值足够大,便可以保证电压误差在可接受范围内。在第4节中的结果也验证了这一结论,即当 时,电压调节精度可达99.5%,这一数据完全符合行业内的电压偏差标准±5%。此外,传统下垂控制方程[5]为
时,电压调节精度可达99.5%,这一数据完全符合行业内的电压偏差标准±5%。此外,传统下垂控制方程[5]为
 (19)
(19)
通过对比可得,所提方法的虚拟压降减小了倍。因此,在值取到较大的情况下,所提方法电压调节效果将远优于传统下垂控制策略。
然而,若要实现外环精度的进一步提高,需要继续增大值。但同时过大的值会引起系统的不稳定,因此参数整定过程存在系统控制效果和系统稳定性之间的矛盾,第3节将对此进行详细分析。
因此,针对上述矛盾,本文提出了如图4所示的双曲正切-比例非线性控制器。
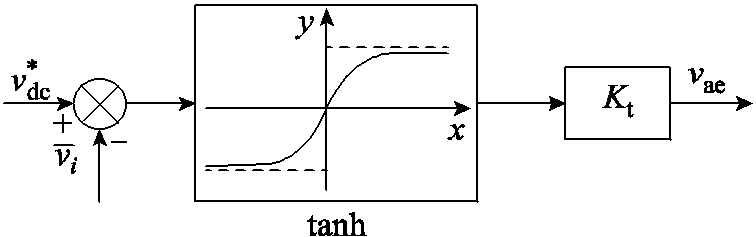
图4 电压外环控制框图
Fig.4 The voltage outer loop control schematic diagram
双曲正切函数(以下简称 )是双曲函数的一种,其为一个连续的函数。函数表达式为
)是双曲函数的一种,其为一个连续的函数。函数表达式为
 (20)
(20)
此时外环电压调节的控制方程为
 (21)
(21)
当系统进入稳态后,依旧可以认为的值是一个不变的常数 ,采用比例控制器和双曲正切-比例控制器电压误差分别为
,采用比例控制器和双曲正切-比例控制器电压误差分别为
 (22)
(22)
 (23)
(23)
将式(23)代入式(20),解出电压误差的表达式为
 (24)
(24)
在这里仍然设定 为一个较大的常数,因此可以认为
为一个较大的常数,因此可以认为 这一项趋近于0。由附录中定理1可以将式(24)改写为
这一项趋近于0。由附录中定理1可以将式(24)改写为
 (25)
(25)
将式(25)与式(22)对比可得,只要> ,即可保证
,即可保证 。
。
令 ,
, 分别为全局输出电流和全局电压参考,
分别为全局输出电流和全局电压参考, 和
和 分别为系统的虚拟阻抗矩阵与比例系数矩阵。双曲正切函数在自变量趋于正无穷时,函数值接近于1,因此调节初期电压动态响应方程为
分别为系统的虚拟阻抗矩阵与比例系数矩阵。双曲正切函数在自变量趋于正无穷时,函数值接近于1,因此调节初期电压动态响应方程为
 (26)
(26)
这种对电压误差天然的限幅特性,能够抑制系统调节初期产生的振荡,使得所提控制器中具有较大的取值范围而不影响系统的稳定运行与调节速度。
此外,所提方法基于双曲函数数学关系,在实际工程应用中,多采用坐标旋转数字计算(Coordinate Rotation Digital Computer, CORDIC)算法实现[18],实现过程简单成熟。
本节中仅对双曲正切-比例控制器的电压调节原理进行了数学推导,关于该控制器对系统暂态和稳态性能的影响分析,将在3.3节中阐明。
节点之间二次控制的通信周期远小于本地控制周期,因此在对二次控制回路进行设计时,可以忽略变换器的本地动态调节过程,认为每个变换器的输出电压可以完全追踪给定值,即 。
。
此外,为了推导简便,后续均对系统调节初期和稳定状态进行分析,其中双曲正切函数图像如图4所示。在调节初期,电压误差 较大,因此误差经过双曲正切函数后将被钳制为1,随着电压误差逐渐减小,系统工作点将逐渐接近坐标原点。对稳定工作点下的双曲正切函数进行线性化为
较大,因此误差经过双曲正切函数后将被钳制为1,随着电压误差逐渐减小,系统工作点将逐渐接近坐标原点。对稳定工作点下的双曲正切函数进行线性化为
 (27)
(27)
可见,当系统处于稳定工作点附近时,非线性函数将几乎对系统调节不产生影响,所提的非线性控制器将近似转变为比例线性控制器。稳态工作点下系统的动态响应方程为
 (28)
(28)
将式(28)代入式(9)~式(11)中,且定义新状态变量为 ,由此可得直流微电网全局稳态模型为
,由此可得直流微电网全局稳态模型为
 (29)
(29)
式中, 为全体元素为1的N阶矩阵。由1.1节可知,0是矩阵的一个特征值,因此,矩阵
为全体元素为1的N阶矩阵。由1.1节可知,0是矩阵的一个特征值,因此,矩阵 不是一个Hurwitz矩阵。
不是一个Hurwitz矩阵。
由式(29)可得,系统的全局模型为一个线性时不变系统。其中 对应于系统输入
对应于系统输入 ,而
,而 对应于系统扰动
对应于系统扰动 。因此,可以应用经典的基于状态-空间表达式的稳定性进行分析。
。因此,可以应用经典的基于状态-空间表达式的稳定性进行分析。
令和为强连接且权重平衡无向图的拉普拉斯矩阵。设观测器系数 ,系统的输入与扰动均有界,即
,系统的输入与扰动均有界,即 且
且 。那么,对于任意的初始状态
。那么,对于任意的初始状态 ,
, ,所提集成式协同控制策略下的直流微电网系统为输入-状态稳定。证明过程如下。
,所提集成式协同控制策略下的直流微电网系统为输入-状态稳定。证明过程如下。
令 。由拉普拉斯矩阵性质可得,
。由拉普拉斯矩阵性质可得, 。定义
。定义 ,使得矩阵
,使得矩阵 是一个正交矩阵,即
是一个正交矩阵,即 ,其中
,其中
 。对式(29)进行矩阵变换得到
。对式(29)进行矩阵变换得到
 (30)
(30)
经过矩阵变换后的全局模型为
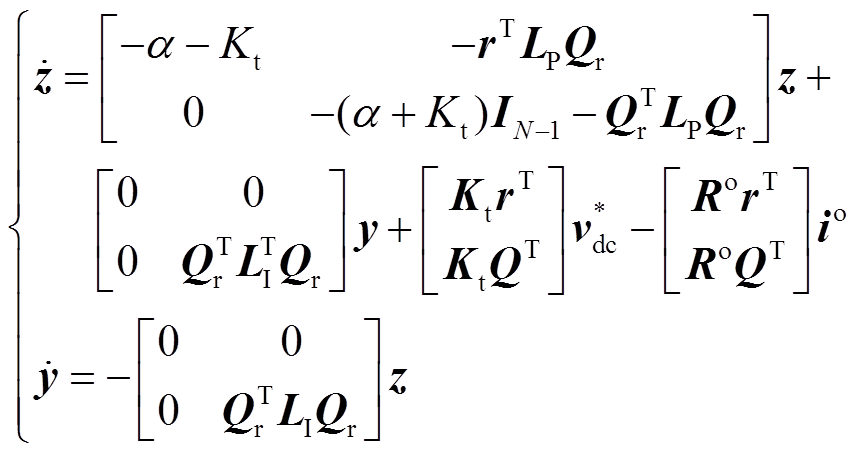 (31)
(31)
显而易见,该全局模型中 的第一项
的第一项 导数为0,即
导数为0,即 。因此,为一个常数,对稳定性并不会产生影响。之后的分析将不考虑的作用,构建新的状态变量
。因此,为一个常数,对稳定性并不会产生影响。之后的分析将不考虑的作用,构建新的状态变量 ,剩余全局模型为
,剩余全局模型为
 (32)
(32)
其中
 (33)
(33)
矩阵 左上角是一个标量矩阵
左上角是一个标量矩阵 ,其为一个Hurwitz矩阵。因此矩阵的剩余部分为
,其为一个Hurwitz矩阵。因此矩阵的剩余部分为
 (34)
(34)
由附录中的定理2与定理3可知,矩阵 也为一个Hurwitz矩阵。因此,矩阵为Hurwitz矩阵,其所有的特征值均具有负实部。对式(35)求解得
也为一个Hurwitz矩阵。因此,矩阵为Hurwitz矩阵,其所有的特征值均具有负实部。对式(35)求解得
 (35)
(35)
对于Hurwitz矩阵而言,有
 (36)
(36)
由文献[17]得出系数 与
与 的选取原则为
的选取原则为
 (37)
(37)
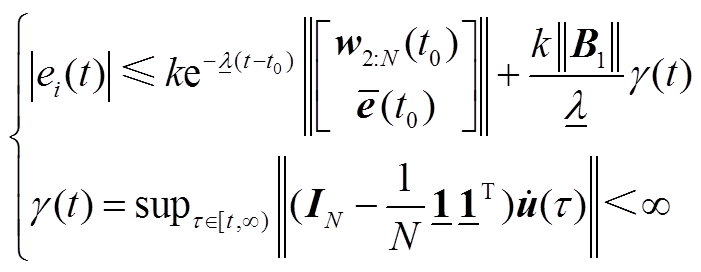
式中, 为矩阵的最大特征值。由此,可以得出式(35)中的范数上界表达式为
为矩阵的最大特征值。由此,可以得出式(35)中的范数上界表达式为
若 且,系统零输入响应将指数衰减至0,零状态响应也为有界的。综上所述,全局系统为输入-状态稳定。证明完毕。
且,系统零输入响应将指数衰减至0,零状态响应也为有界的。综上所述,全局系统为输入-状态稳定。证明完毕。
当值增加时,由式(33)和特征值概念可得,矩阵 最大特征值将变大,对应着
最大特征值将变大,对应着 的值也将变大。对于式(38),增大会加快零输入响应衰减至0的速度,并减小零状态响应系数绝对值
的值也将变大。对于式(38),增大会加快零输入响应衰减至0的速度,并减小零状态响应系数绝对值 。此外,结合第2节中的描述,可以得出的增大能够加快系统动态响应速度,且提高系统电压调节精度。
。此外,结合第2节中的描述,可以得出的增大能够加快系统动态响应速度,且提高系统电压调节精度。
然而,在采用比例控制器时,由式(28)可得,比例系数的取值将会影响系统电压调节的变化速率。尤其是在系统调节初期,电压误差 较大,若设定较大的比例系数将会引起系统电压的快速变化,从而导致系统发生剧烈振荡,引起保护器件误动作,危害系统的稳定运行。在4.2.1节中(图12、图14)通过实验证实了这一点。
较大,若设定较大的比例系数将会引起系统电压的快速变化,从而导致系统发生剧烈振荡,引起保护器件误动作,危害系统的稳定运行。在4.2.1节中(图12、图14)通过实验证实了这一点。
当电压外环采用双曲正切-比例控制器时,系统调节初期的电压动态响应方程为式(26),此时电压误差经过双曲正切环节后的值 被钳制为1。在调节初期到稳态运行的过程中,电压误差逐渐减小至0,双曲正切-比例控制器最终近似转换为比例控制器。此时,双曲正切-比例控制器相较于比例控制器有更大的增益,这将保证所提方法有着更快的节点电压一致收敛速度。在4.2.1节中通过实验证明了这一点。
被钳制为1。在调节初期到稳态运行的过程中,电压误差逐渐减小至0,双曲正切-比例控制器最终近似转换为比例控制器。此时,双曲正切-比例控制器相较于比例控制器有更大的增益,这将保证所提方法有着更快的节点电压一致收敛速度。在4.2.1节中通过实验证明了这一点。
因此,该控制器本质上为对电压误差的一种自适应调节方法,避免了因调节初期较大的电压误差与较大的比例系数同时作用于系统而导致的系统振荡,从而缓解了系统响应速度、控制精度与稳定性之间的矛盾。因此,相较于采用比例控制器,所提方法提高了比例系数的取值上限。
此外,由第3节得出的结论可知,若值大于,可提高系统电压调节精度。其中 ,可通过设计合理的虚拟电阻大小来确保取值大小合理,因而保证可以较为容易地取到比大的值,从而提高系统调节精度。
,可通过设计合理的虚拟电阻大小来确保取值大小合理,因而保证可以较为容易地取到比大的值,从而提高系统调节精度。
本节主要的结果验证包含两部分。第一部分为对改进一致性算法的效果验证,该项内容的验证基于PLECS仿真软件。在较为简易的仿真模型下测试了算法对噪声和初始条件的鲁棒性,并在与经典算法的对比,证明了改进算法优越性,详见4.1节。
第二部分为对所提协同控制方法的硬件在环实验,实验结果验证了所提协同控制方法在多种工况下的有效性,详见4.2节。本实验在2个PLECS RT Box上完成,其配备了丰富的数字和模拟接口以及集成FPGA的运算模块。其中一个RT Box用于模拟直流微电网主电路,另一个用于当作实时控制器运行所提控制方法,具体实验平台如图5(本节实验测试中仅用到图示平台中的A, B, C)。其中主电路系统与控制器系统之间通过模拟通道传输数据。硬件在环实验中考虑了数据的采样、传输和计算时间、通信延时等方面,相较于离线仿真更接近于真实物理系统。

图5 硬件在环实验平台
A—上位机;B—实时控制器;C—主电路模拟器;D—功率变换平台;E—直流电源
Fig.5 Hardware-in-the-loop experimental bench
除此之外,从工程实际角度出发,对本节开展的效果验证过程做出如下设定。
设定1:出于对安全的考虑,所有分布式节点变流器输出电压与电流均严格设定于保护阈值之内。
设定2:由于通信带宽的限制,基于一致性算法的电压观测器应采用较大的时间常数,而各分布式电源的本地控制回路中采用较小的时间常数。
改进一致性算法相较于经典一致性算法提高了对测量噪声和初始化条件的鲁棒性。因此,本节中将从以上两个方面与经典一致性算法进行效果对比验证。搭建仿真的模型中包含四个恒定电压源节点,其电压分别为420、410、390、380 V,经典算法和改进算法中采用的邻接系数均设定为1。
需要补充说明的是,本节仅针对采用不同一致性算法的电压观测器进行测试,考量测量噪声和初始化条件对观测器的影响。因此仿真模型中仅包含四个恒定电压源与对应电压观测器,各节点间没有功率线路连接,即不考虑各节点间的功率交互,控制目标为各节点电压观测值可以一致收敛至400 V。
4.1.1 噪声鲁棒性测试
设定算法中所有变量初始值均为0,即满足式(5),在节点1电压源中叠加噪声,该噪声值为呈正态分布的随机数,在这里取m=0,s=0.08。叠加测量噪声后的控制效果如图6所示。图6中0~5 s展示了采用经典一致性算法下的观测平均值波形,5~10 s展示了采用改进一致性算法下的观测平均值波形。可见,采用改进算法后的观测值受噪声影响更小,控制效果更好。因此,改进算法对测量噪声具有强鲁棒性,应用于所提直流微电网协同控制框架可实现高品质的电压调节。
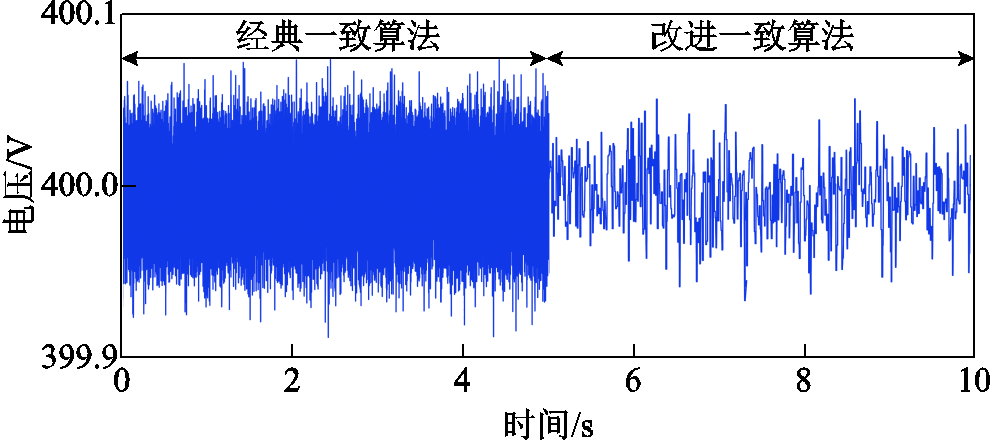
图6 叠加测量噪声后的控制效果
Fig.6 Performance of improved consensus algorithm after superimposing measurement noise
4.1.2 初始化条件鲁棒性测试
在节点电压源无叠加噪声的情况下,设定节点1的电压观测器变量初始值为2 V,这将破坏式(5)的平衡条件。图7与图8分别展示了经典一致性算法与改进一致性算法在这种情况下的表现。显而易见,改进一致性算法在不满足初始化条件的情况下,仍可以使各节点观测值正确收敛至400 V,但经典一致性算法下的各节点无法正确收敛,观测得到的电压值在稳态时为397.5 V,存在约为2.5 V的误差。此外,式(5)等式两端不平衡度越大,观测误差也将随之增大。因此,改进一致性算法对初始化条件具有鲁棒性,允许各个节点任意进入和离开微电网系统,保证了系统的“即插即用”能力。
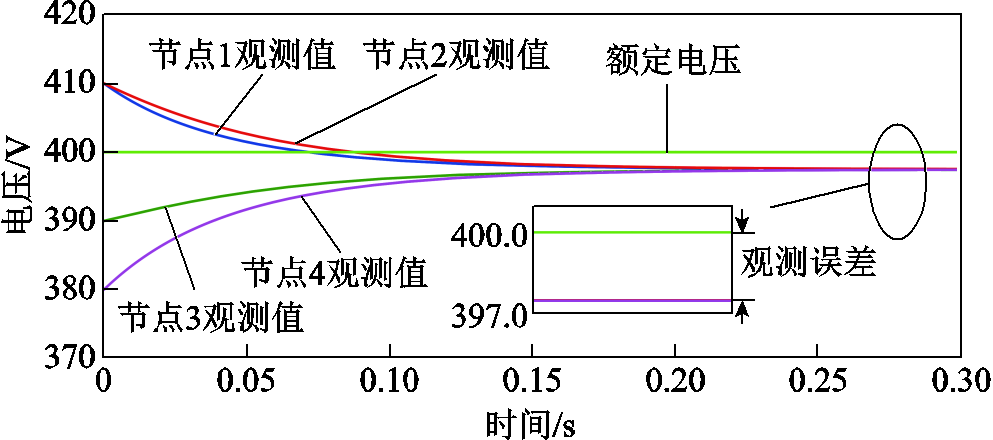
图7 改变初始条件后经典算法控制效果
Fig.7 Control effect of classical algorithm after changing initial conditions
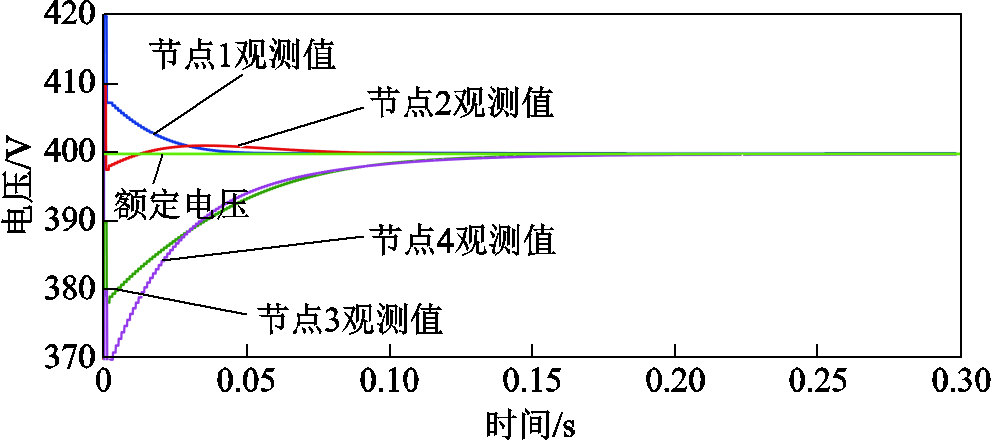
图8 改变初始条件后改进算法控制效果
Fig.8 Control effect of improved algorithm after changing initial conditions
本实验中采用四个分布式电源并联构成的孤岛直流微电网系统,它们之间的通信结构为首尾相连的环状拓扑,所有节点的邻接系数均满足 ,具体如图9所示。其中,线路阻抗建模为阻感形式,本地负载与公共母线负载建模为阻性,
,具体如图9所示。其中,线路阻抗建模为阻感形式,本地负载与公共母线负载建模为阻性, 为其等效总母线负载。具体实验关键参数见表1。
为其等效总母线负载。具体实验关键参数见表1。
表1 硬件在环实验关键参数
Tab.1 Key parameters of HiL experiment
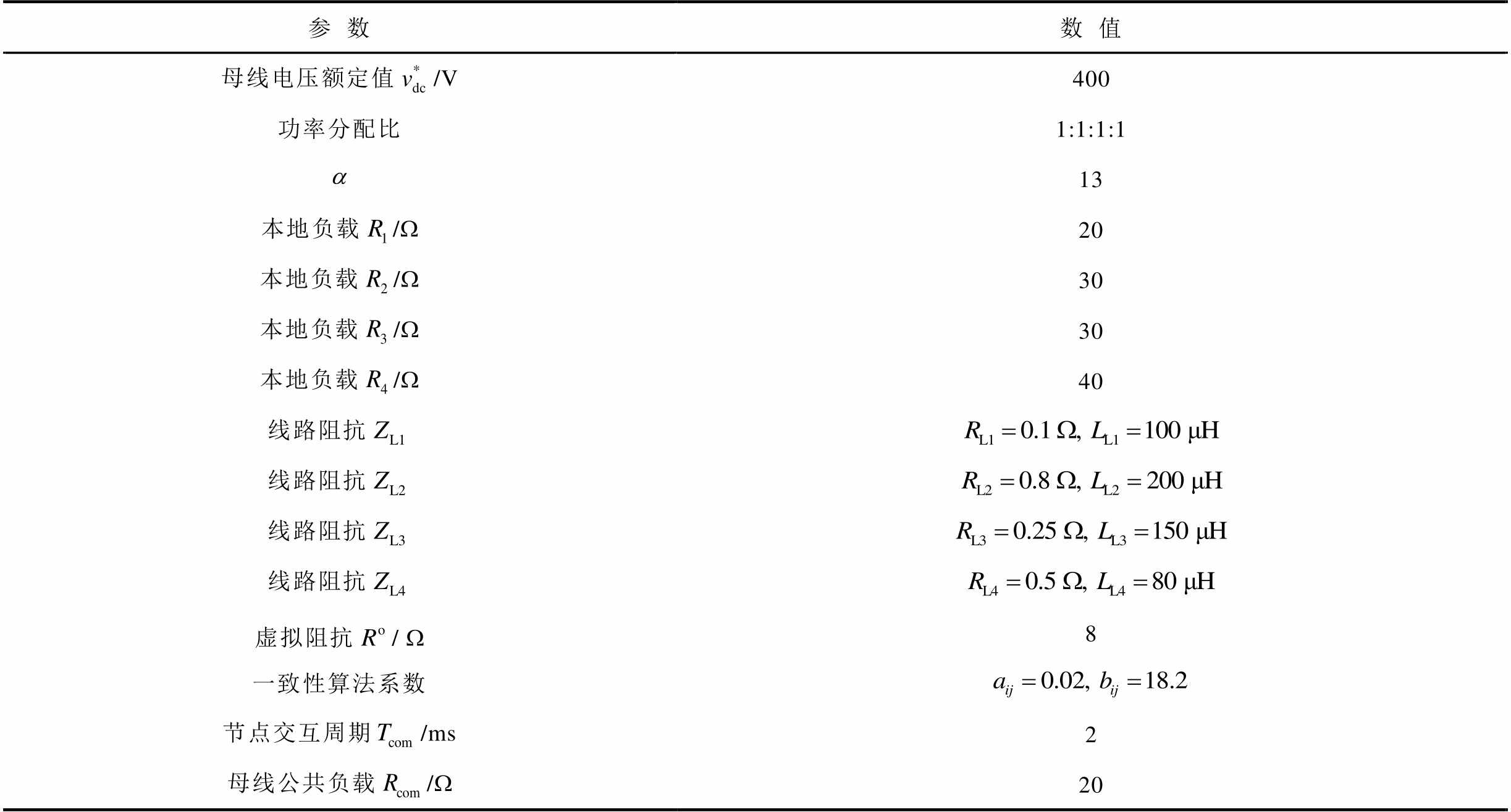
参数数值 母线电压额定值/V400 功率分配比1:1:1:1 13 本地负载/W20 本地负载/W30 本地负载/W30 本地负载/W40 线路阻抗 线路阻抗 线路阻抗 线路阻抗 虚拟阻抗/ W8 一致性算法系数 节点交互周期/ms2 母线公共负载/W20
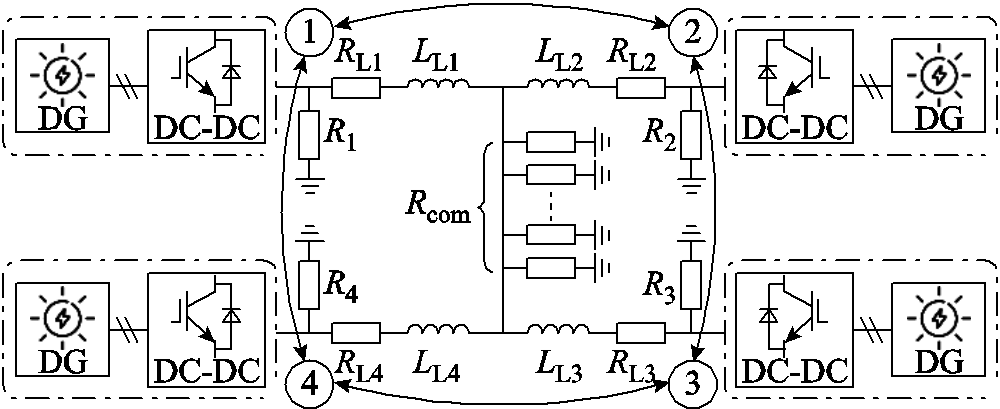
图9 4节点孤岛直流微电网系统拓扑结构
Fig.9 The isolated DC microgrid system with 4 nodes network topology
4.2.1 效果验证
图10中分别展示了本文所提方法的电流和电压控制效果。为了评估该方法的暂态过程中的电压调节和功率分配性能,在0.5 s与1.5 s时分别引入了母线负载突增和母线负载突降,其中,0.5 s时负载从20  突变为10 ,1.5 s时负载从10 突变回20 。可以看出,所提方法可在不发生剧烈电压变化的情况下快速实现新的均流状态。
突变为10 ,1.5 s时负载从10 突变回20 。可以看出,所提方法可在不发生剧烈电压变化的情况下快速实现新的均流状态。
图11中展示了文献[14]中经典方法的电流和电压控制效果。可见,两种方法均可实现精准的电压调节与功率分配目标,然而相较于本文所提方法,经典方法中电压与电流调节均基于PI控制器,不仅计算量较大,且控制带宽有限,从而导致电压与电流收敛速度较慢,在相同的暂态调节过程中,需约0.5 s才可达到一致收敛状态,本文所提方法仅需0.35 s。由此可得,所提方法有更好的暂态响应速度。
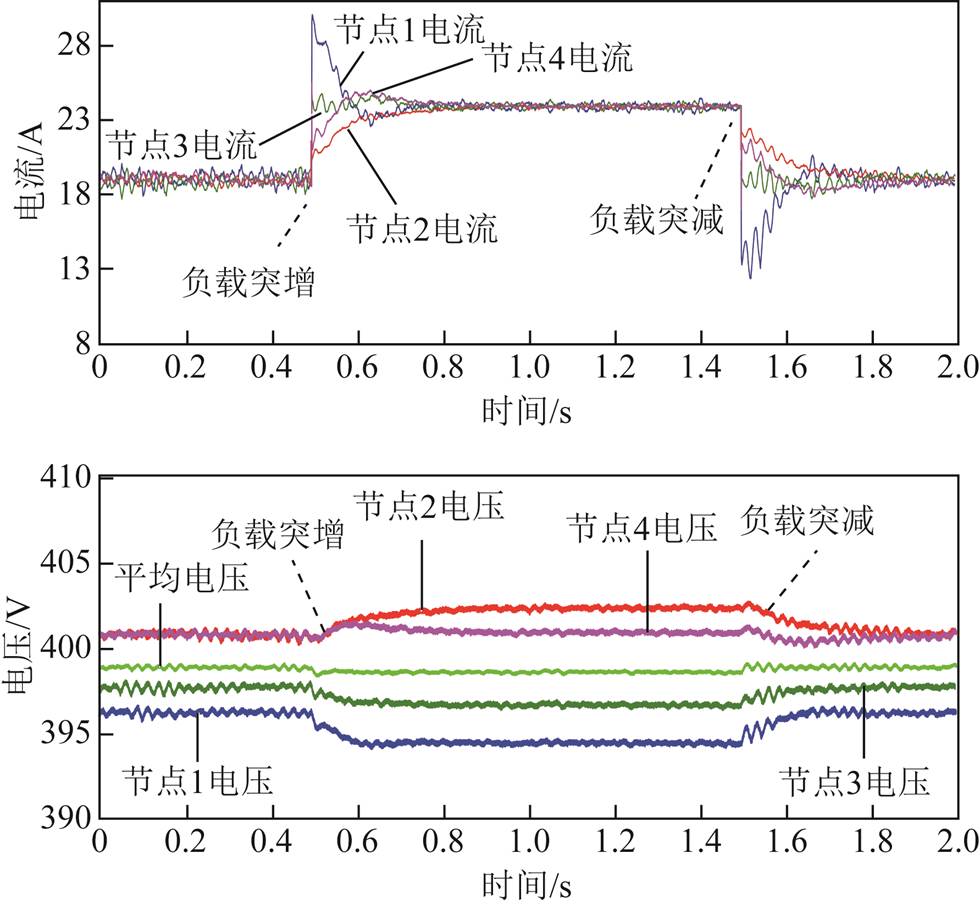
图10 所提方法电流和电压控制效果
Fig.10 The current and voltage performance of the proposed method
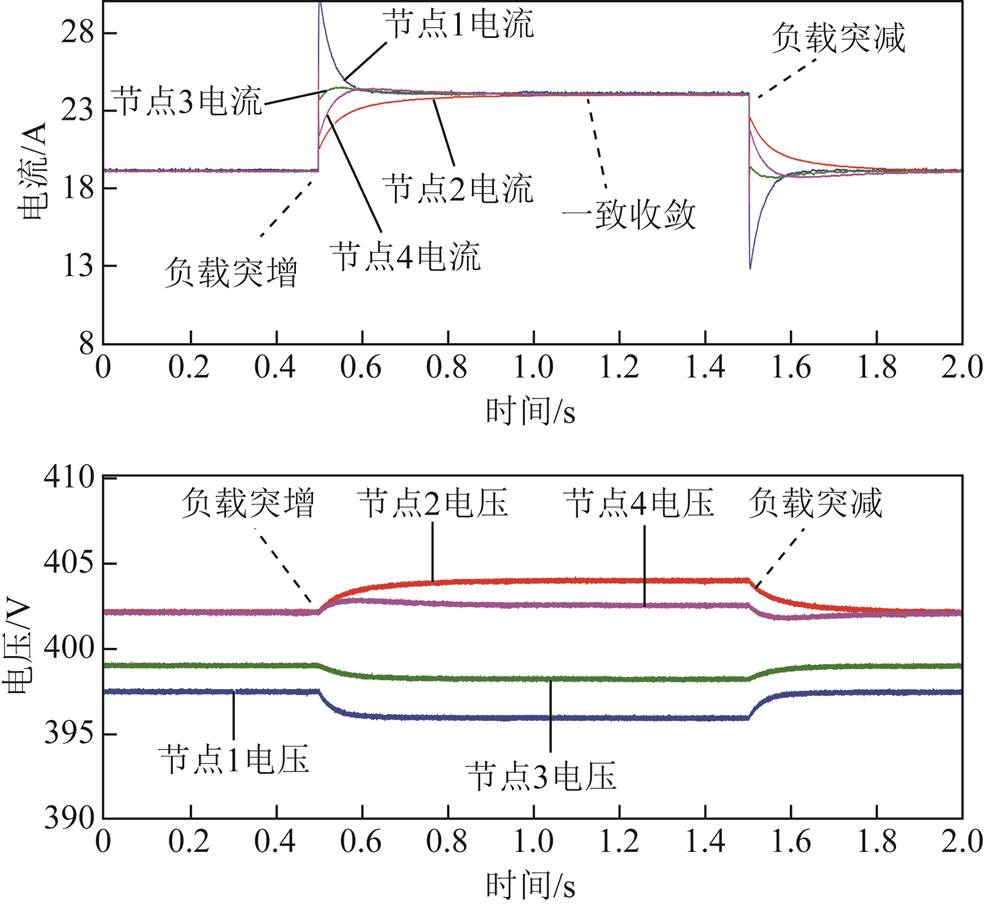
图11 经典方法电流和电压控制效果
Fig.11 The current and voltage performance of the classic method
在此需要说明的是,本文遵循的参数设计原则为在兼顾系统稳定性的前提下,尽可能最大化控制品质。然而直流微电网系统中线路阻抗未知且多时间尺度控制策略混杂,因此难以得到全局精确的数学模型,为参数的量化计算带来很大困难。
本文所提方法仅需整定比例系数,因此采用较为简单的试凑法来确定参数。通过选取不同比例系数,观测系统响应波形,确定引起系统不稳定的比例系数临界值,将该值确定为比例系数整定值。
以比例控制器为例,图12展示了较大比例控制器系数下的电压波形。当 时系统电压已产生较为剧烈的振荡,在
时系统电压已产生较为剧烈的振荡,在 时系统电压调节过程呈现发散趋势,这也佐证了3.3节中的论述。因此,在保证系统稳定性的同时为了不失良好的动态性能,进行多组系数试验。下述测试中比例控制器的系数取
时系统电压调节过程呈现发散趋势,这也佐证了3.3节中的论述。因此,在保证系统稳定性的同时为了不失良好的动态性能,进行多组系数试验。下述测试中比例控制器的系数取 =150,双曲正切-比例控制器的系数取=320。
=150,双曲正切-比例控制器的系数取=320。
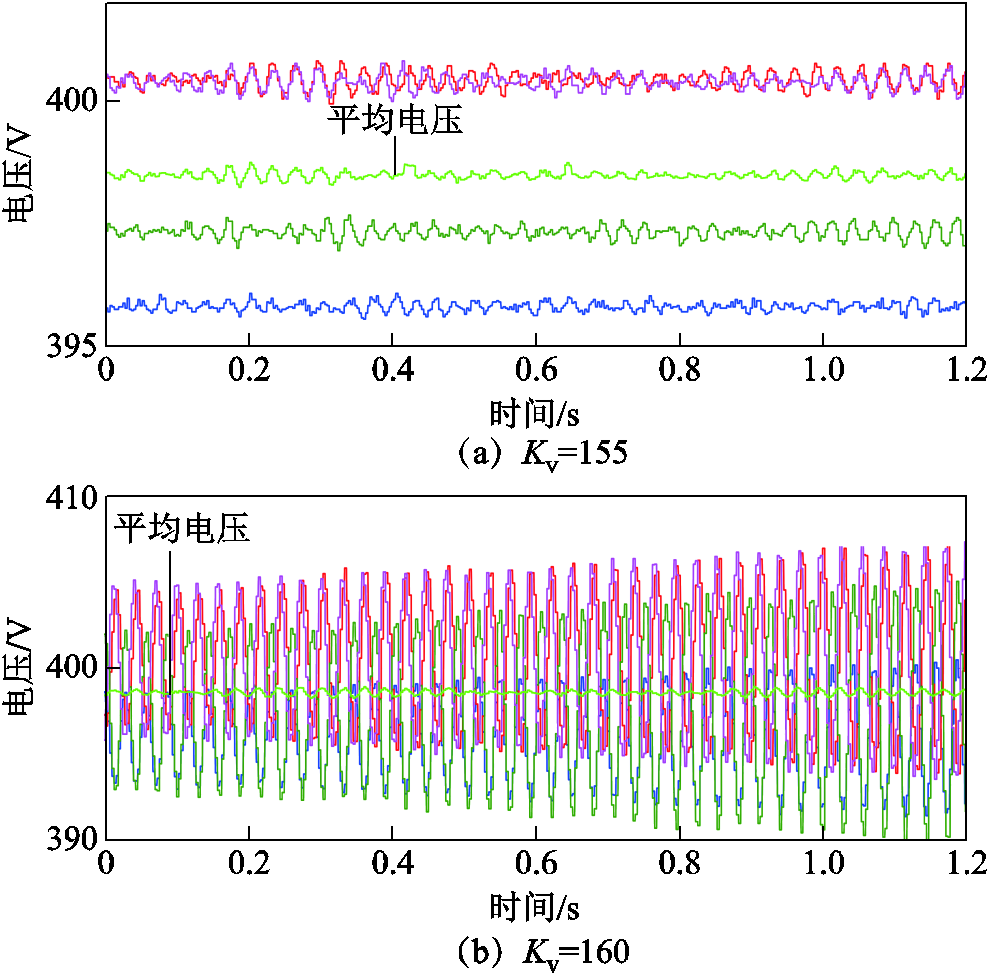
图12 不同系数下的系统电压调节效果
Fig.12 System voltage regulation effect under different coefficient
图13中分别展示了采用不同控制器的稳态电压调节。由图13可知,本文所提方法电压调节精度可达399 V,相较于采用比例控制器的398.2 V,稳态精度有进一步的提升。图14中分别展示了系统启动时的电压暂态波形,可以得出采用比例控制器下的电压会产生一定的振荡,且平均电压的降落较大,严重损害了系统控制品质,影响负荷的电能质量。而采用双曲正切-比例控制器下的电压振荡得到有效抑制,电压的调节过程将更平滑,平均电压的降落也大大减小。此外,对0.25~0.4 s内的波形进行放大后可得出,采用比例控制器下的节点电压处于收敛阶段,而采用双曲正切-比例控制器下的节点电压将更快地达到一致性收敛。因此,综上可以得出,双曲正切-比例控制器可以在保证较大的控制系数下同时实现高精度的稳态调节与平滑快速的暂态调节。
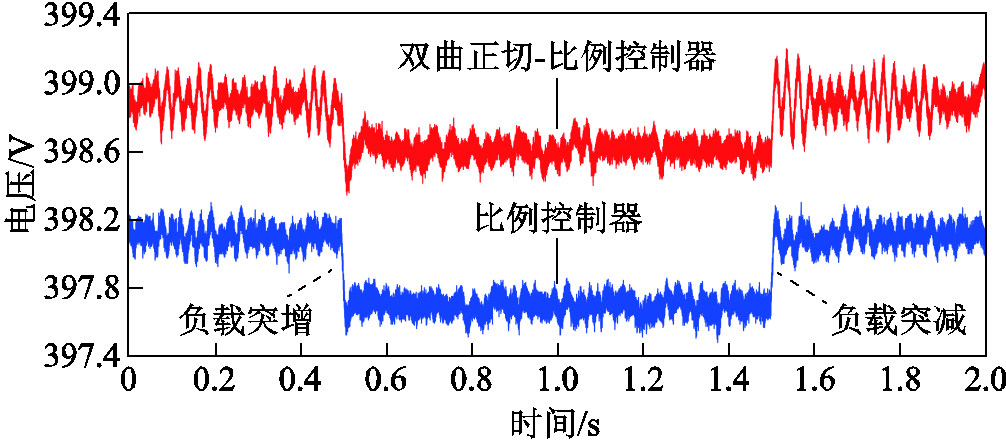
图13 电压调节精度对比
Fig.13 Comparison of voltage regulation accuracy
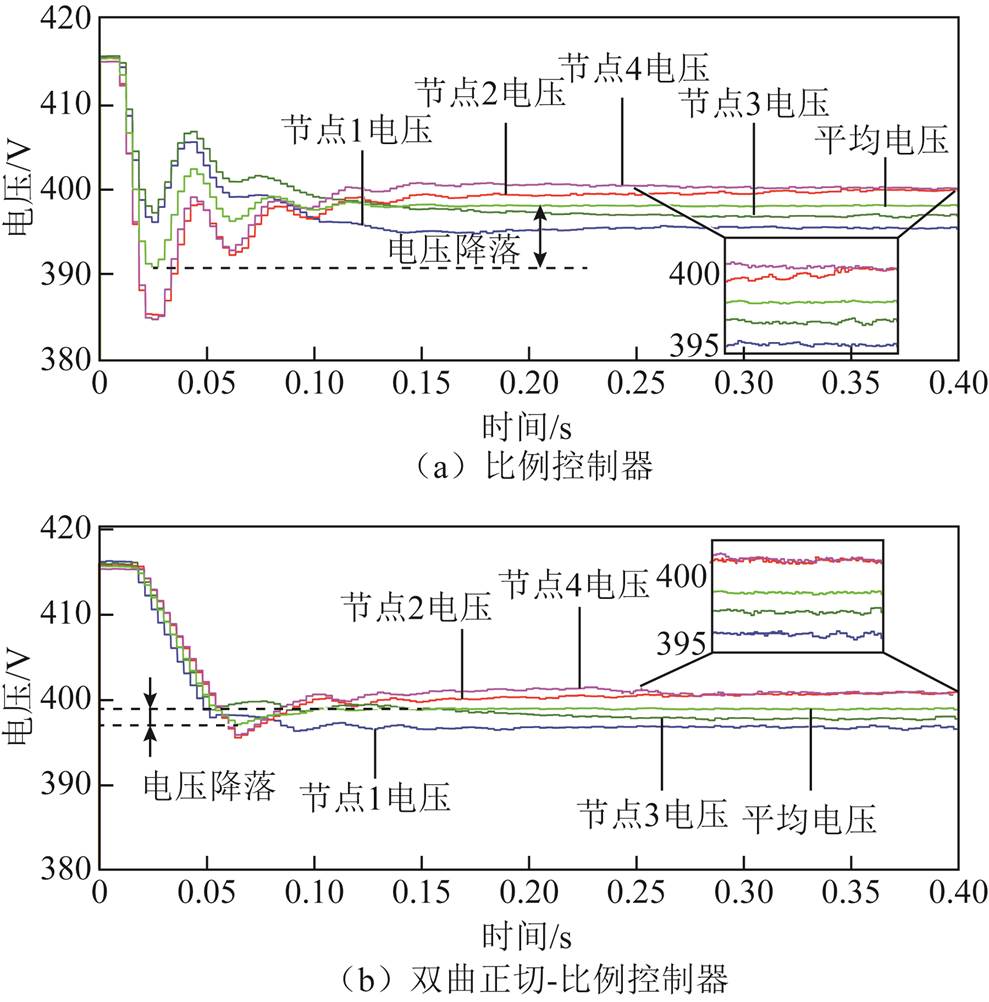
图14 系统启动时电压调节效果对比
Fig.14 Comparison of voltage regulation effect when the system is started
4.2.2 通信失败工况测试
本节测试本文所提方法面对通信失效时的强韧性。假设节点1发生通信故障,其无法通过通信收取来自节点2和节点4的信息,也无法给节点2和节点4自己的信息。为了最小化通信失败后的影响,这里采用一种“握手”机制,即一旦节点2和节点4无法收取到来自节点1的信息,便将相应邻接系数 和
和 置为0。同时为加强与其余节点的通信联系,节点2和节点3、节点4和节点3的邻接系数
置为0。同时为加强与其余节点的通信联系,节点2和节点3、节点4和节点3的邻接系数 和
和 变为原来的2倍。
变为原来的2倍。
基于上述假设,在0 s设定节点1出现故障,同时依然分别在0.5 s与1.5 s引入负载突变,测试结果如图15所示。可以看出,当节点发生通信故障后,本文所提方法无论是在稳态运行过程还是在暂态调节过程中几乎不受到影响,对通信故障具有弹性。
4.2.3 “即插即用”能力测试
本节通过禁用和启用各节点通信和输出功率来测试所提方法的“即插即用”特性。其中,关于禁用节点通信的测试机制采用了与4.2.2节相同的“握手”机制。在0.5 s时节点4退出系统,在1.5 s时节点4再进入系统,整个动态响应过程如图16所示。可见,当节点4离开系统后,其余三个节点仍可以自动准确地重新分配功率,且三个节点的电压平均值可以维持在额定值附近(其中,节点4的电压由其外部电路决定)。当节点4再次进入系统后,再次启用节点4的通信,系统再次回到四个节点正常协同工作状态。因此,所提方法具有即插即用能力。
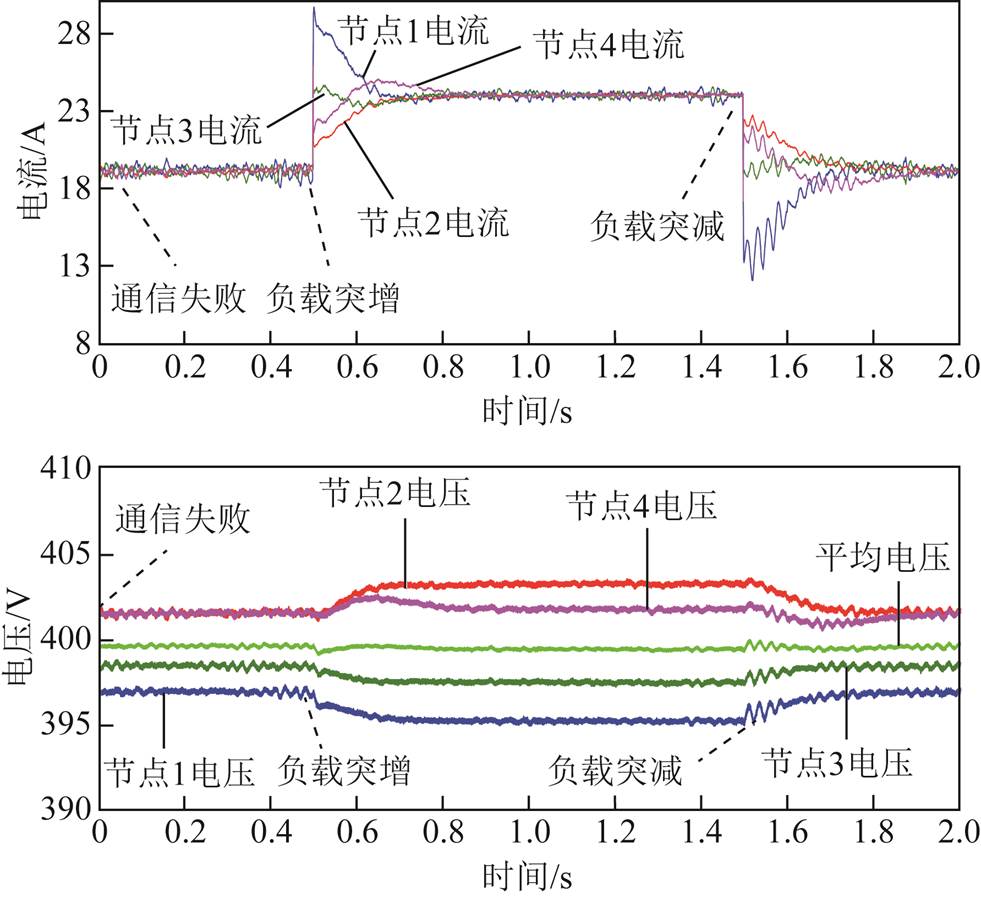
图15 通信失败下系统性能测试
Fig.15 System performance when communication fails
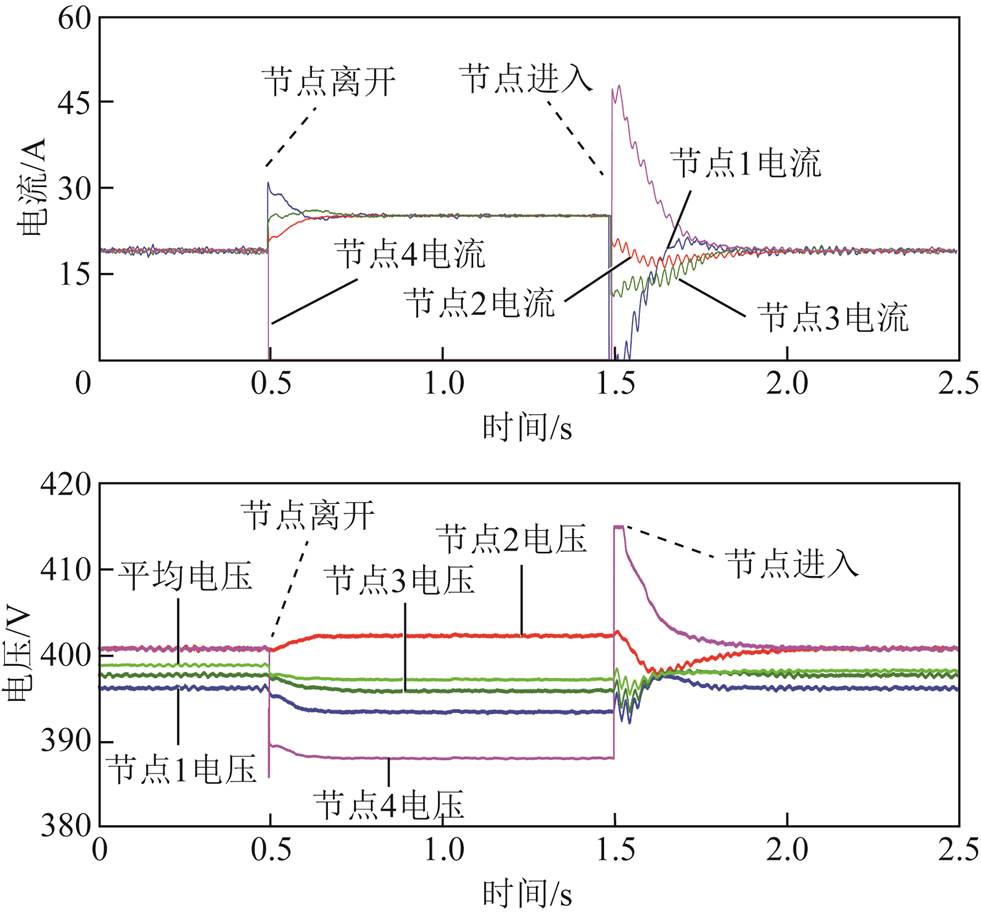
图16 系统“即插即用”性能测试
Fig.16 System “plug and play” performance test
4.2.4 本地负载变化影响
各节点本地负载的大小将直接影响功率分配效果。因此,本节测试了所提方法中本地负载变化的影响,在0.5 s与1.5 s时对节点4分别引入了本地负载突增和本地负载突降。其中,0.5 s时负载从40 突变为20 ,1.5 s时负载从20 突变回40 。测试结果如图17所示,由于节点4直接提供瞬时功率,因此节点4的输出电流具有最大的波动。然而,本文所提方法的控制设计与微电网参数无关,所以在本地负载变化的情况下,本文所提方法可以较快地消除不平衡电流,且维持平均电压在额定值附近。
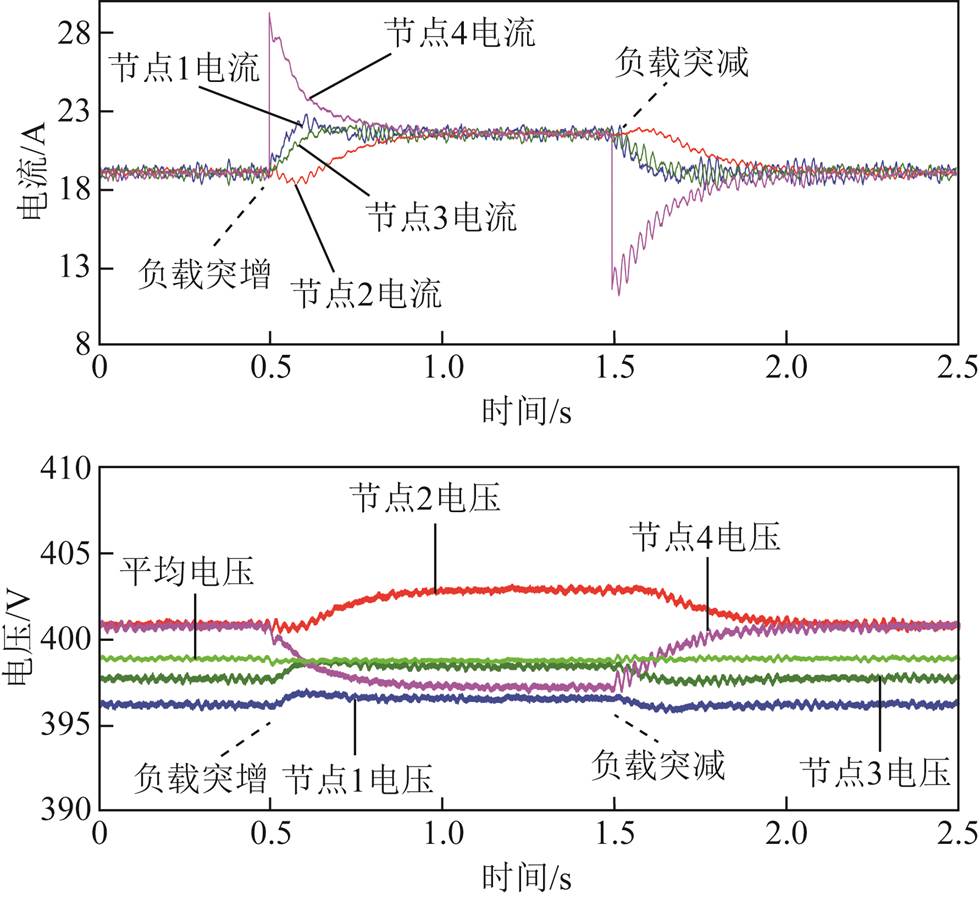
图17 本地负载变化时系统性能测试
Fig.17 System performance when local load changes
4.2.5 不同通信网络拓扑影响测试
图9中选取的通信网络拓扑有着较强的通信可靠性同时又保证了网络的稀疏性。本节中测试了所提方法在如图18所示两种不同通信网络拓扑下的控制效果。其中,图18a的通信拓扑相较于图18b连通度有所降低,因此,图18b中电压与电流收敛速度较为变慢,但所提方法仍可以在较低连通度的通信拓扑下保证精准的电压调节和功率分配。
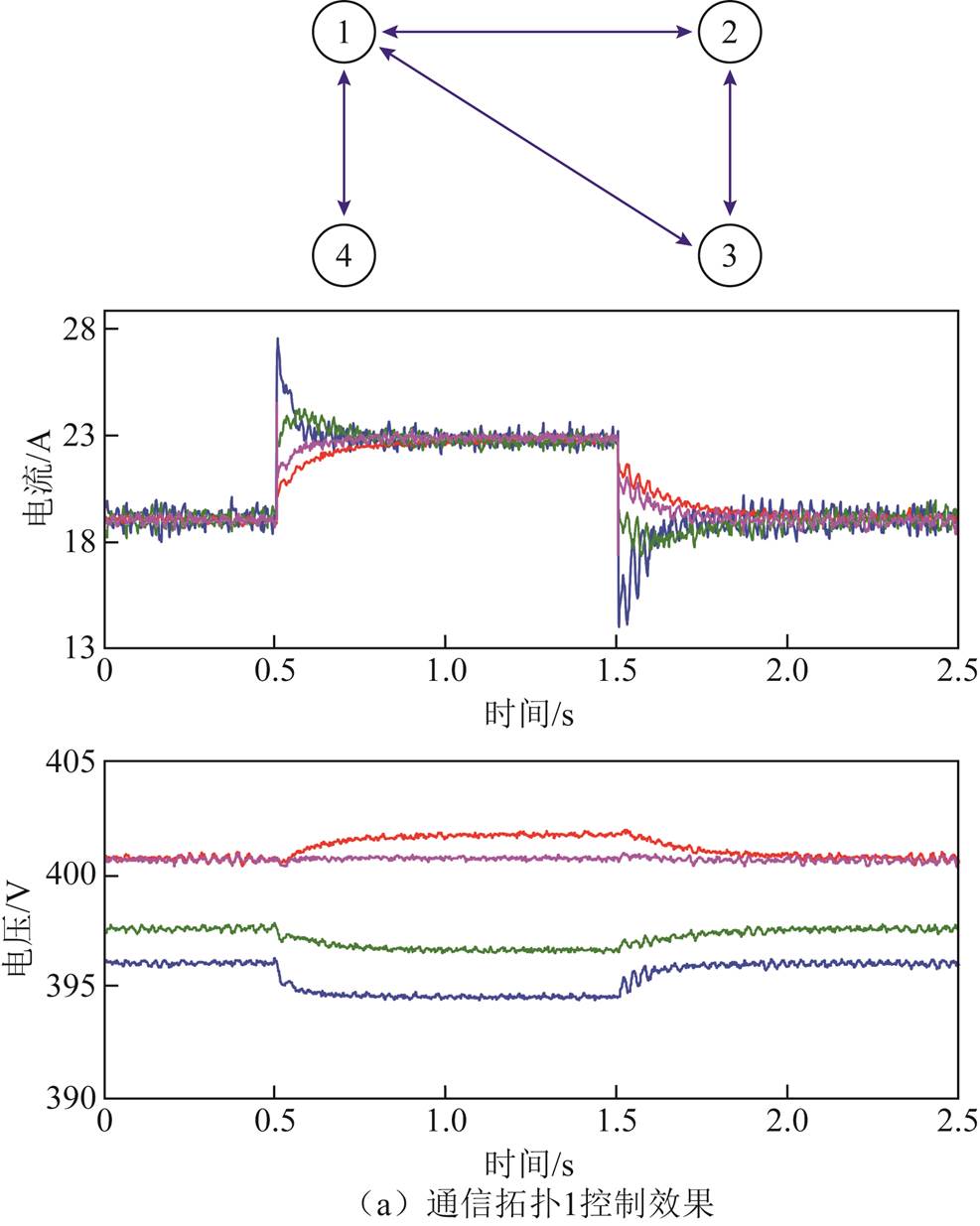
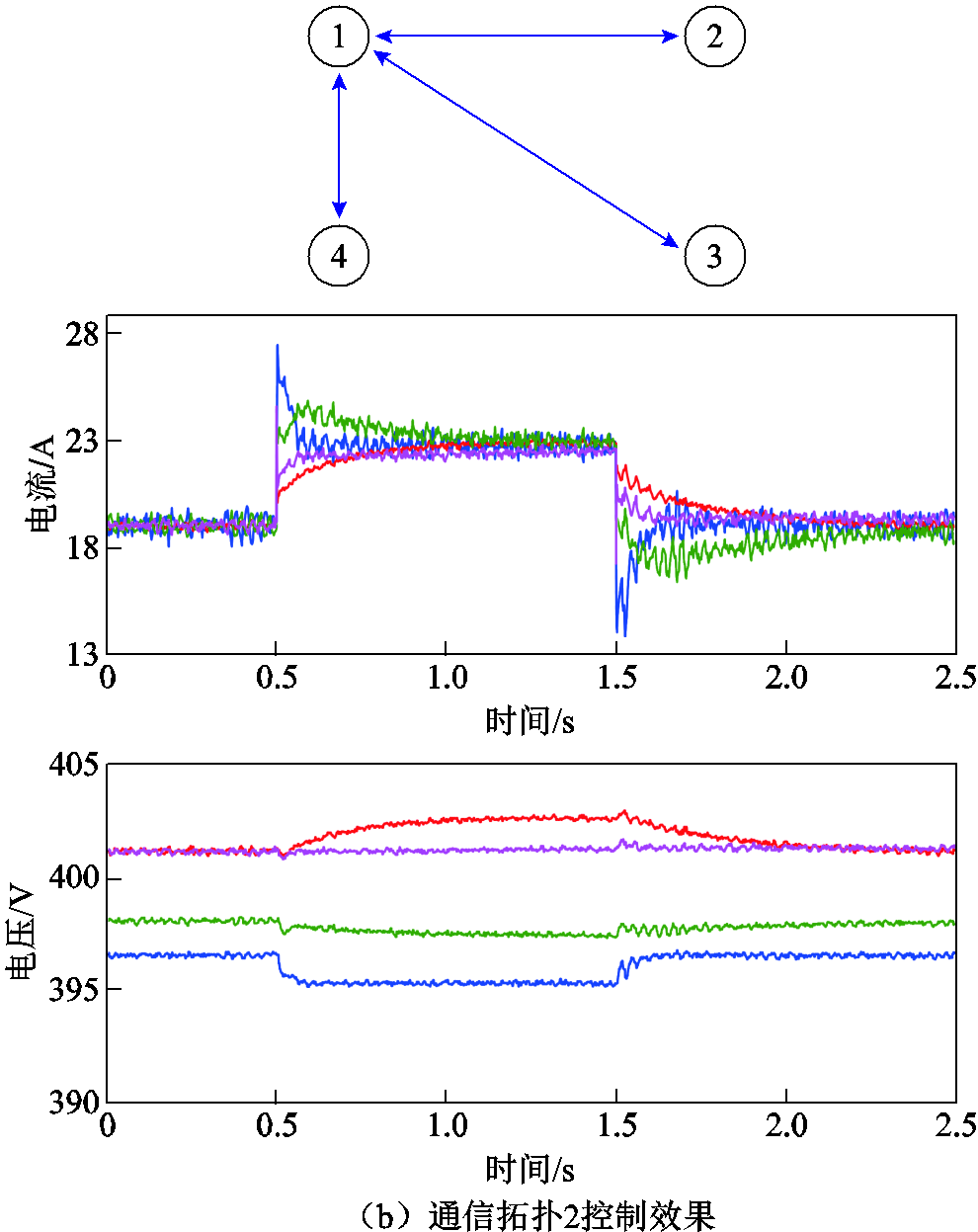
图18 不同通信网络拓扑下的控制效果
Fig.18 Control effect under different communication network topologies
直流微电网的运行目标主要包括母线电压的精准调节与各单元功率的精确分配,为实现此目标,经典协同控制方法需要从通信网络中同时获取相邻节点电压和电流信息,对通信带宽提出了较高的要求。本文提出一种集成式高品质协同控制策略,将电压调节和电流调节的目标集成为一体,无需获取相邻节点电流信息,从理论上减少了一半的通信量,大大降低了实际工程中通信线路的构建成本。此外,为进一步获得高品质的控制效果,本文分别提出了改进的电压观测器与双曲正切-比例控制器。前者相较于经典观测器,可实现观测电压对测量噪声的脱敏,并保证微电网内各节点无需初始化条件的自由退出与接入;后者针对线性控制器在参数选择上的局限性,可兼顾系统全局稳定性的同时,提高系统的暂态响应速度与动态调节精度。上述工作均经过理论推导证明了输入-状态稳定性,并通过硬件在环实验测试验证了多种运行工况下的有效性。
附 录
定理1:在同一自变量的趋向过程中,若两个无穷小之比的极限为1,则称这两个无穷小是等价的。其中当 时,有
时,有 。
。
定理2:假设矩阵 ,同时满足
,同时满足 且矩阵
且矩阵 是可逆的,因此矩阵
是可逆的,因此矩阵 是Hurwitz矩阵[19]。
是Hurwitz矩阵[19]。
 (A1)
(A1)
定理3:假设矩阵 的秩为
的秩为 ,令
,令 分别为其零特征值对应的左右特征向量。令矩阵
分别为其零特征值对应的左右特征向量。令矩阵 的列为构成扩张空间
的列为构成扩张空间 (与
(与 向量正交)的一组基,令矩阵
向量正交)的一组基,令矩阵 的列为构成扩张空间
的列为构成扩张空间 (与
(与 向量正交)的一组基。此时,
向量正交)的一组基。此时, 可逆[19]。
可逆[19]。
证明1:改进一致性算法具有渐近收敛性。
定义系统平均电压 为
为
 (A2)
(A2)
节点 收敛误差
收敛误差 为
为
 (A3)
(A3)
收敛误差可分解为两部分,一部分为一致性收敛分量( 方向),另一部分为非一致性收敛分量(与正交方向)。定义变换矩阵
方向),另一部分为非一致性收敛分量(与正交方向)。定义变换矩阵 ,其中
,其中 ,满足
,满足 ,对此有变量变换:
,对此有变量变换:
 (A4)
(A4)
代入式(29),可得等效数学模型为
 (A5)
(A5)
其中
 (A6)
(A6)
由定理2与定理3可知,矩阵 为Hurwitz 矩阵,因此可以使用输入-状态稳定性理论对收敛误差进行分析。其中关于输入-状态稳定性理论与分析手段已在第3.2节中展开详细叙述。
为Hurwitz 矩阵,因此可以使用输入-状态稳定性理论对收敛误差进行分析。其中关于输入-状态稳定性理论与分析手段已在第3.2节中展开详细叙述。
令 和
和 为强连接且权重平衡无向图的拉普拉斯矩阵。因此节点
为强连接且权重平衡无向图的拉普拉斯矩阵。因此节点 收敛误差可以写为
收敛误差可以写为
 (A7)
(A7)
其中关于 的取值也可由式(36)、式(37)得出,即
的取值也可由式(36)、式(37)得出,即 取决于矩阵的特征值。对于任意的
取决于矩阵的特征值。对于任意的 ,当
,当 时,式(9)~式(11)轨迹满足
时,式(9)~式(11)轨迹满足
 (A8)
(A8)
因此,改进一致性算法具有渐近收敛性,收敛速度取决于。
参考文献
[1] 吴珊, 边晓燕, 张菁娴, 等. 面向新型电力系统灵活性提升的国内外辅助服务市场研究综述[J]. 电工技术学报, 2023, 38(6): 1662-1677. Wu Shan, Bian Xiaoyan, Zhang Jingxian, et al. A review of domestic and foreign ancillary services market for improving flexibility of new power system[J]. Transactions of China Electrotechnical Society, 2023, 38(6): 1662-1677.
[2] 高海力, 谭建成. 大型光储联合虚拟同步发电机技术综述[J]. 电气技术, 2018, 19(1): 1-4, 9. Gao Haili, Tan Jiancheng. The overview of the vsg technology of grid connected large-scale PV-storage hybrid system[J]. Electrical Engineering, 2018, 19(1): 1-4, 9.
[3] 姜云鹏, 任洲洋, 李秋燕, 等. 考虑多灵活性资源协调调度的配电网新能源消纳策略[J]. 电工技术学报, 2022, 37(7): 1820-1835. Jiang Yunpeng, Ren Zhouyang, Li Qiuyan, et al. An accommodation strategy for renewable energy in distribution network considering coordinateddispatching of multi-flexible resources[J]. Transactions of China Electrotechnical Society, 2022, 37(7): 1820-1835.
[4] 李霞林, 郭力, 王成山, 等. 直流微电网关键技术研究综述[J]. 中国电机工程学报, 2016, 36(1): 2-17. Li Xialin, Guo Li, Wang Chengshan, et al. Key technologies of DC microgrids: an overview[J]. Proceedings of the CSEE, 2016, 36(1): 2-17.
[5] 朱珊珊, 汪飞, 郭慧, 等. 直流微电网下垂控制技术研究综述[J]. 中国电机工程学报, 2018, 38(1): 72-84, 344. Zhu Shanshan, Wang Fei, Guo Hui, et al. Overview of droop control in DC microgrid[J]. Proceedings of the CSEE, 2018, 38(1): 72-84, 344.
[6] Bidram A, Davoudi A. Hierarchical structure of microgrids control system[J]. IEEE Transactions on Smart Grid, 2012, 3(4): 1963-1976.
[7] Li Yu, Zhang Zhenbin, Dragičević T, et al. A unified distributed cooperative control of DC microgrids using consensus protocol[J]. IEEE Transactions on Smart Grid, 2021, 12(3): 1880-1892.
[8] 刘忠, 杨陈, 蒋玮, 等. 基于一致性算法的直流微电网储能系统功率分配技术[J]. 电力系统自动化, 2020, 44(7): 61-69. Liu Zhong, Yang Chen, Jiang Wei, et al. Consensus algorithm based power distribution technology for energy storage system in DC microgrid[J]. Automation of Electric Power Systems, 2020, 44(7): 61-69.
[9] 杨珺, 侯俊浩, 刘亚威, 等. 分布式协同控制方法及在电力系统中的应用综述[J]. 电工技术学报, 2021, 36(19): 4035-4049. Yang Jun, Hou Junhao, Liu Yawei, et al. Distributed cooperative control method and application in power system[J]. Transactions of China Electrotechnical Society, 2021, 36(19): 4035-4049.
[10] 吕振宇, 吴在军, 窦晓波, 等. 基于离散一致性的孤立直流微网自适应下垂控制[J]. 中国电机工程学报, 2015, 35(17): 4397-4407. Lü Zhenyu, Wu Zaijun, Dou Xiaobo, et al. An adaptive droop control for the islanded DC microgrid based on discrete consensus algorithm[J]. Proceedings of the CSEE, 2015, 35(17): 4397-4407.
[11] 王炜信, 段建东, 张润松, 等. 孤岛电网中多储能设备SOC一致性优化策略[J]. 电工技术学报, 2015, 30(23): 126-135. Wang Weixin, Duan Jiandong, Zhang Runsong, et al. Optimal state-of-charge balancing control for paralleled battery energy storage devices in islanded microgrid[J]. Transactions of China Electrotechnical Society, 2015, 30(23): 126-135.
[12] Li Chendan, Savaghebi M, Vasquez J C, et al. Multiagent based distributed control for operation cost minimization of droop controlled AC microgrid using incremental cost consensus[C]//2015 17th European Conference on Power Electronics and Applications (EPE'15 ECCE-Europe), Geneva, Switzerland, 2015: 1-9.
[13] 杨美辉, 周念成, 王强钢, 等. 基于分布式协同的双极直流微电网不平衡电压控制策略[J]. 电工技术学报, 2021, 36(3): 634-645. Yang Meihui, Zhou Niancheng, Wang Qianggang, et al. Unbalanced voltage control strategy of bipolar DC microgrid based on distributed cooperation[J]. Transactions of China Electrotechnical Society, 2021, 36(3): 634-645.
[14] Nasirian V, Moayedi S, Davoudi A, et al. Distributed cooperative control of DC microgrids[J]. IEEE Transactions on Power Electronics, 2015, 30(4): 2288-2303.
[15] 周烨, 汪可友, 李国杰, 等. 基于多智能体一致性算法的微电网分布式分层控制策略[J]. 电力系统自动化, 2017, 41(11): 142-149. Zhou Ye, Wang Keyou, Li Guojie, et al. Distributed hierarchical control for microgrid based on multi-agent consensus algorithm[J]. Automation of Electric Power Systems, 2017, 41(11): 142-149.
[16] 楼冠男. 对等模式下独立微电网分布式电压控制研究[D]. 南京: 东南大学, 2018.
[17] Kia S S, Van Scoy B, Cortes J, et al. Tutorial on dynamic average consensus: the problem, its applications, and the algorithms[J]. IEEE Control Systems Magazine, 2019, 39(3): 40-72.
[18] Meher P K, Valls J, Juang T B, et al. 50 years of CORDIC: algorithms, architectures, and applications[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2009, 56(9): 1893-1907.
[19] Freeman R A, Yang Peng, Lynch K M. Stability and convergence properties of dynamic average consensus estimators[C]//Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 2007: 338-343.
Abstract The cooperative control of DC microgrids based on consensus algorithm can make each distributed generation to achieve voltage regulation and power sharing by capacity, which only required key operating information of neighboring units. But most of the existing control strategies have the following problems: (1) Each distributed node needs to obtain the voltage and current information of neighboring nodes from the communication network, which requires higher communication bandwidth. (2)The complex coupling of two PI controllers which are used to achieve the control objectives of voltage and power respectively makes the setting of controller parameters tedious. (3) The voltage observer based on classical consensus algorithm need to follow the initialization conditions strictly and cannot guarantee the plug and play characteristics of the system. Therefore, to address these issues, this paper proposes an integrated high-quality cooperative control strategy of DC microgrids.
Firstly, the voltage and current regulators are integrated, which can achieve control goals more simply and drop out the need for current information of neighboring units. Secondly, the improved consensus algorithm is adopted to make the system robust to the measurement noise and initialization conditions. Thirdly, considering the contradiction between system instability under high open-loop gain and poor control performance under low open-loop gain, a hyperbolic tangent-proportional nonlinear controller is proposed to enlarge the parameter selection range and improve the control quality of the system. Finally, a global model of the DC microgrid considering the cyber network is established in the form of a state-space-model. The input-to-state stability analysis is carried out. Meanwhile the influence of controller parameters on system stability is illustrated in the round.
The hardware-in-the-loop (HiL) experiment verifies the control effect of the proposed method and the performance of the proposed method under various working conditions, including communication failure, the plug and play characteristics, local load changes, different communication network topologies. The results show that the proposed cooperative control strategy can realize accurate voltage regulation and power sharing within 0.3 s. In the face of bus load or local load changes, it shows good transient performance and steady state accuracy. Meanwhile, because of the proposed hyperbolic tangent-proportional nonlinear control, the initial shock of system adjustment has been effectively suppressed and the steady-state accuracy of the system has been effectively improved. The voltage observer with consensus algorithm can greatly reduce the influence of measurement noise and doesn't require strict initialization. When any node enters or exits the system, the system can still redistribute power automatically and accurately. In addition, the proposed method is resilient to communication failure and different communication network topologies. All the above results show the superiority of the proposed method.
The conclusion of this paper can be drawn as follows: (1) The proposed voltage observer with improved consensus algorithm is robust to measurement noise and initialization conditions, which can improve the quality of control and guarantee the plug and play capacity. (2) The proposed cooperative control strategy can realize accurately voltage regulation and power sharing. Compared with the classic control method, it can reduce communication traffic half in theory. (3) The proposed hyperbolic tangent-proportional nonlinear controller can alleviate the contradiction between control quality and system stability. It is simple and effective to improve the control quality.
keywords:DC microgrid, distributed cooperative control, distributed generation, consensus algorithm, nonlinear control
DOI:10.19595/j.cnki.1000-6753.tces.221387
中图分类号:TM732
深圳市科技计划(JCYJ20210324132616040)、山东省重点研发计划(重大科技创新工程)(2019JZZY020805)和国家自然科学基金(52277192、52277191)资助项目。
收稿日期 2022-07-19
改稿日期 2022-09-15
张 昊 男,1999年生,硕士研究生,研究方向为分布式发电与微网。E-mail:zhang.hao@mail.sdu.edu.cn
李 真 女,1983年生,博士研究生,副研究员,研究方向为宽禁带半导体器件可靠性、新能源变流装备与系统检-容错控制。E-mail:zhenli0901@sdu.edu.cn(通信作者)
(编辑 赫蕾)