 (1)
(1)
摘要 该文提出一种应用于永磁同步电机的级联式高性能显式模型预测控制算法,基于多参数规划思想建立系统参数化模型,离线求解有约束条件下的最优解并以状态量的分段仿射函数形式保存,解决了连续控制集模型预测控制算法在线求解的算力需求问题;全面介绍了显式模型预测控制的应用思想及设计流程,分析了在永磁同步电机控制中模型失配、死区效应、数字延时等非理想因素带来的影响并给出了应对措施;与传统PI控制算法进行对比,通过仿真与实验验证了显式模型预测控制算法的有效性及优越性。
关键词:永磁同步电机(PMSM) 显式模型预测控制 最优化控制 转速预测控制 电流预测控制
在新世纪“双碳”国家能源战略大背景下,伴随着“电动化、智能化、网联化”相互赋能,我国的电动汽车产业发展已经进入了一个崭新的阶段。
在三电之一的电机控制领域中,过去数十年间应用最为广泛的PI控制策略属于经典的多环路控制策略(multiloop control)[1],基于误差调节的控制思想使其具有较强的普适性,但是也仍然存在一些问题:PI控制的增益系数通常只在特定的工作区内表现优异,缺乏针对电机状态变化的优化考虑[2];电机d、q轴之间的耦合项被定义为扰动,前馈交叉解耦等策略将影响到系统的动态性能[3];控制量的选择没有考虑到系统的约束条件,如定子电流大小以及电压源逆变器的最大可输出电压,限制了电驱系统的性能及效率,且由于积分控制器的存在,抗饱和策略的引入可能会导致线性系统的不稳定[4]。
20世纪70年代于过程工业提出的预测类控制算法标志着业界控制思想开始由调节向寻优方向的转变,从基于脉冲、阶跃响应模型的预测算法[5-6]到广义预测控制(General Predictive Control, GPC)的提出[7-8],再到结合最优化控制以及李雅普诺夫稳定性思想的综合性理论,经过数十年的发展,模型预测控制(Model Predictive Control, MPC)算法已经成为针对多输入多输出、具有复杂约束条件的非线性动态系统的有效控制策略,其实现思想是在每一个控制周期内,基于系统预测模型及当前的状态量(测量值或估计值),求解代价函数(cost function)在预测时域内最优的控制序列,选取第一个控制量作用于控制对象,并不断重复该过程。然而,受限于MPC对于寻优问题的巨大算力需求,直到近些年来,随着计算处理单元的迅速发展和各类新算法的提出,才开始广泛应用于电力电子和电机控制领 域[9]。
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)控制领域中,根据是否需要脉冲宽度调制(Pulse Width Modulation, PWM)技术,MPC分为有限控制集(Finite Control Set, FCS)及连续控制集(Continuous Control Set, CCS)两类[10]。FCS直接以逆变器开关组合为控制动作,遍历求解使得代价函数最优的开关状态,并延伸出了一系列优化算法,如多矢量控制[11-17]、多步控制[18-19]等;CCS控制策略依赖PWM技术,基于系统模型及代价函数求解一个最优化控制问题,最优控制量以幅值及相位皆连续可调的电压矢量表达,保证了固定的开关频率。最优化控制问题一般为无约束或有约束的二次规划形式,对于无约束问题,基于代数黎卡提方程求解的最优控制量具有解析解形式,此类控制方法也被称之为线性二次型调节器(Linear Quadratic Regulator, LQR)。对于有约束问题,由于约束条件的复杂性,其最优解不存在解析解形式,可以通过一些数值求解方法求得近似最优的数值解,如梯度投影法、内点法、有效集法等,但是对于电机系统此类响应时间要求较快的控制对象,很难在较短的控制周期内完成对于目标问题的迭代求解[20]。显式模型预测控制(Explicit Model Predictive Control, EMPC)思想的提出[21],将有约束问题在线求解的数值解形式转化为离线关于状态量的分段仿射(Piecewise Affine, PWA)函数显式表达,有效地解决了MPC在线求解困难的问题。
本文提出一种基于EMPC思想的高性能永磁同步电机控制策略。采用多参数规划思想分别建立电流控制及转速控制的系统线性化模型,消除状态之间的耦合及非线性环节影响,离线求解在有效约束条件下使得代价函数最优的控制量并以分段仿射函数的形式保存,实际运行中通过查询当前状态量组合所在分区,获取对应的最优控制量。对MPC应用中的模型失配、数字延时、死区效应等问题进行了全面分析并给出了相应的解决方案,基于一套全自动对拖测试平台验证了算法的有效性。
MPC的三大组成要素分别为:预测模型、代价函数、滚动优化,定义线性时不变系统预测模型为
(1)
式中,A、B、C为系统常系数矩阵;x、u分别为系统的状态及控制向量;t为时间。
x、u的维度及约束条件定义为
 (2)
(2)
式中, 为状态量约束多面体;
为状态量约束多面体; 为控制量约束多面体;n为状态量维度;m为控制量维度[20]。
为控制量约束多面体;n为状态量维度;m为控制量维度[20]。
假设系统在t时刻所有状态量x皆可测量或可估计得到,定义预测时域(t→t+N)内的有约束有限时间尺度最优化控制(Constrained Finite Time Optimal Control, CFTOC)问题(在MPC中称之为代价函数)为
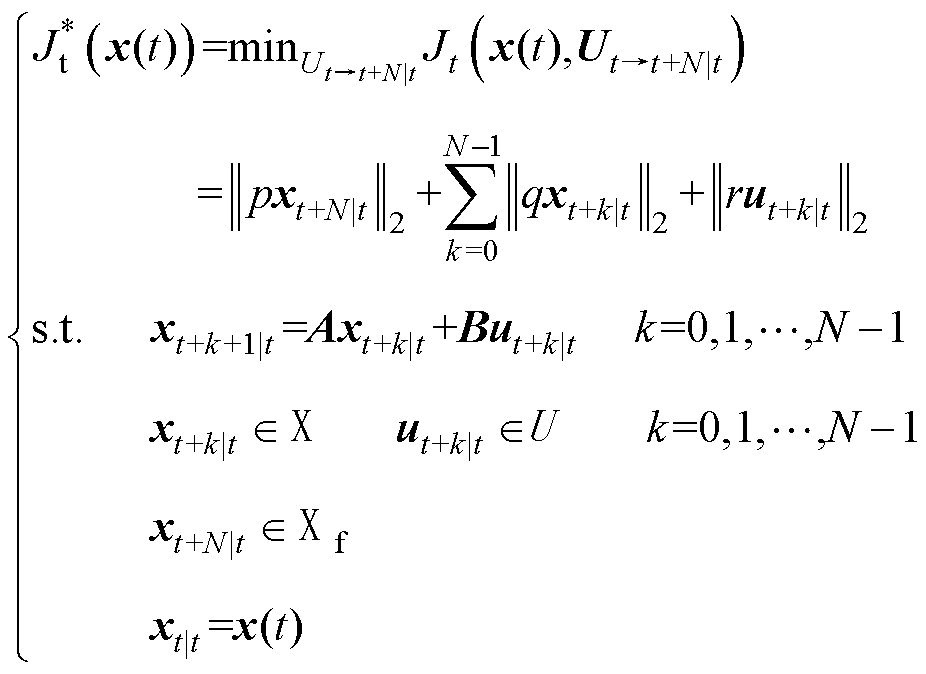 (3)
(3)
式中,p、q、r为代价函数中对于不同控制目标的权重因子; 为对于系统终端状态的约束,代价函数通常选择为
为对于系统终端状态的约束,代价函数通常选择为 型范数定义为二次规划问题;定义xt为t时刻的状态值;x(t)为t时刻测量或估计得到的状态值;
型范数定义为二次规划问题;定义xt为t时刻的状态值;x(t)为t时刻测量或估计得到的状态值; 为代价函数式(3)求解的最优控制量,后文统一记为
为代价函数式(3)求解的最优控制量,后文统一记为 ;
; 为基于xt及所得到的在t+k时刻的状态预测值。由式(3)的约束条件可知,对于最优化控制问题而言,除了对于状态量及输入量的线性不等式约束外,线性系统本身也是一种等式约束,预测时域内任意时刻的状态皆可通过系统初始值及最优控制量迭代求解。
为基于xt及所得到的在t+k时刻的状态预测值。由式(3)的约束条件可知,对于最优化控制问题而言,除了对于状态量及输入量的线性不等式约束外,线性系统本身也是一种等式约束,预测时域内任意时刻的状态皆可通过系统初始值及最优控制量迭代求解。
首先讨论系统约束条件带来的问题,定义状态可行集(Feasible Set, FS) 为
为
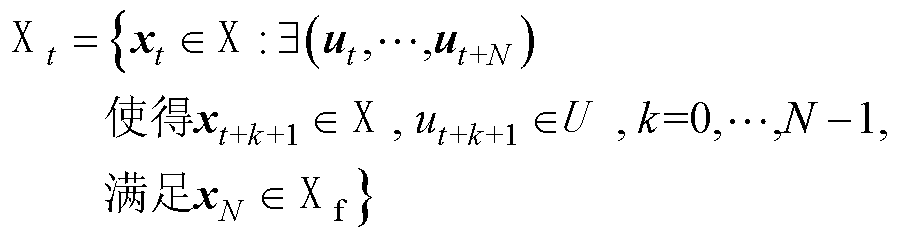 (4)
(4)
对于可行集内的任意状态量xt都可以求得最优控制量,使得在预测时域内的状态量满足约束条件。
从t~t+N内,状态量及控制量应当处于一个如式(5)所示的高维约束多面体 内,t时刻的可行集是在状态坐标系上的投影[20]。在EMPC问题中,随系统时间递推,预测时域内的可行集将随之发生改变,基于此产生了最大控制不变集
内,t时刻的可行集是在状态坐标系上的投影[20]。在EMPC问题中,随系统时间递推,预测时域内的可行集将随之发生改变,基于此产生了最大控制不变集 的定义,即找到一个最大的状态约束集,使得无论控制量取何值,预测时域内的状态量皆可满足系统约束。
的定义,即找到一个最大的状态约束集,使得无论控制量取何值,预测时域内的状态量皆可满足系统约束。
 (5)
(5)
式中,G、E、W为系统约束矩阵。
定义终端状态约束集为最大控制不变集,反向递推预测时域内的状态可行集如图1所示。该过程充分说明了EMPC处理有约束问题的优越性,即在不同的时刻不能以简单的绝对值限幅策略对控制量进行限制,约束条件的存在不仅是对于控制器执行能力的限制,还需保证在控制量的作用下,未来的状态量运行轨迹也要符合可行集范畴。
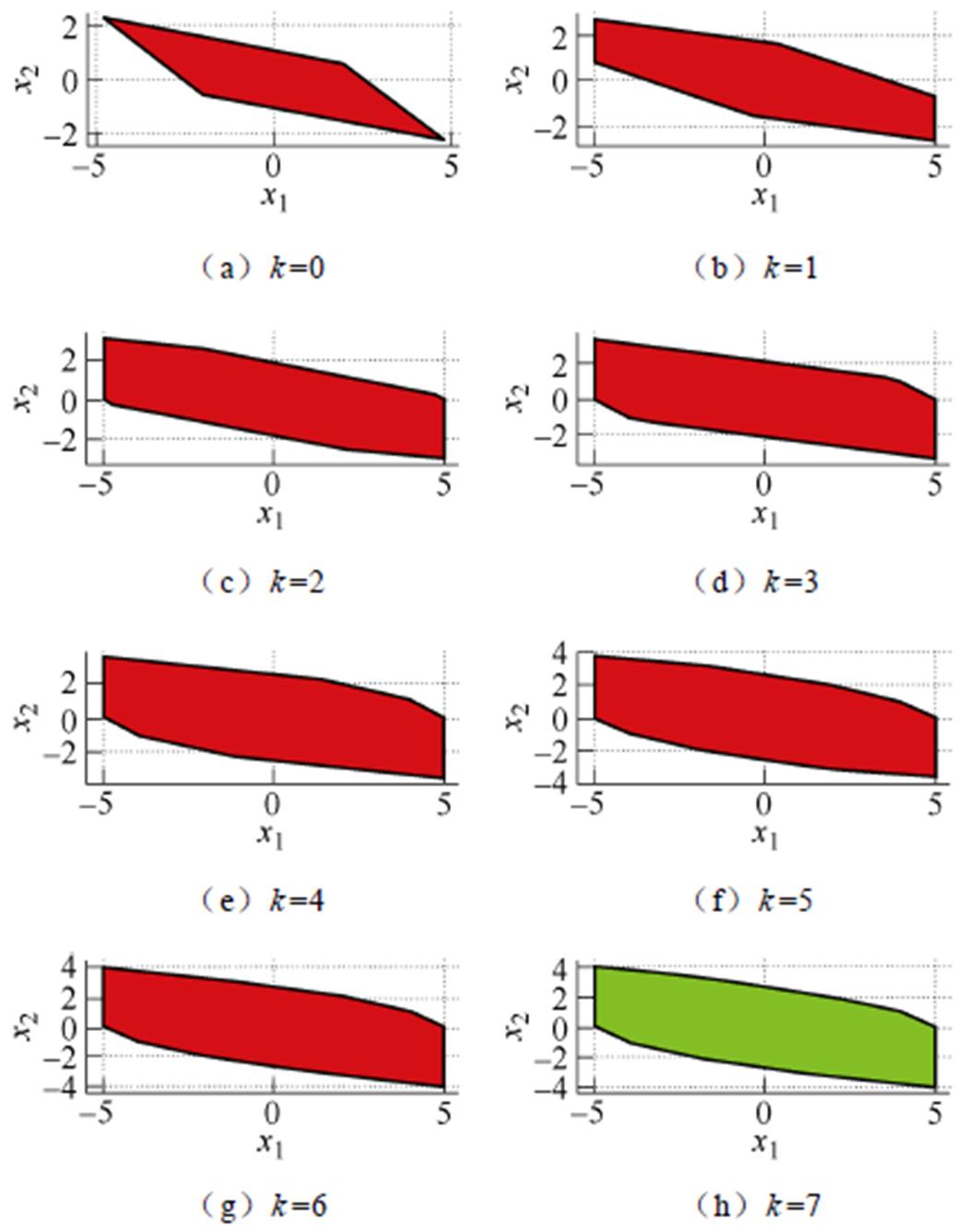
图1 控制不变集 的迭代求解
的迭代求解
Fig.1 Propogation of control invariant set
将线性系统本身定义的等式约束代入到代价函数中,采用批处理法将待求的多时间尺度问题转化为基于系统当前状态值x(t) 的单时间尺度内的多维控制问题,有
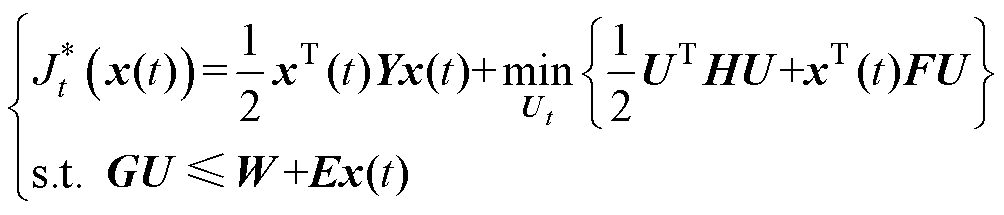 (6)
(6)
式中,Y、H、F皆为系统参数及权重系数所定义的常系数矩阵[21],且 。
。
定义t时刻的新控制变量zt如式(7)所示,zt为原问题控制量Ut及状态量x(t)的线性仿射组合,则式(6)所示原问题可转化为标准的二次规划形式如式(8)所示。
 (7)
(7)
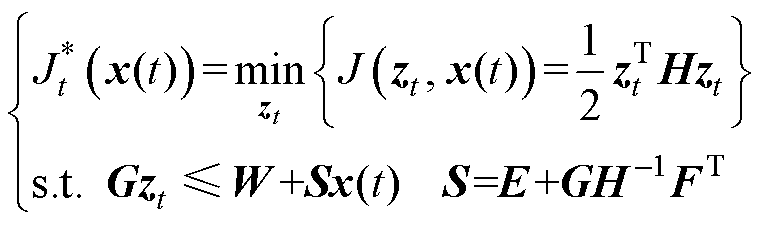 (8)
(8)
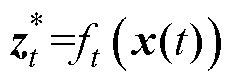
式(8)是一个凸二次规划问题。由于约束条件的存在,该问题无法求出基于线性时不变(Linear Time Invariant, LTI)状态反馈控制律的解析解,基于各类数值求解方法的在线策略需要耗费大量的计算时间,且预测时域越长,所需的计算资源越大。对于此问题,滚动时域控制(Receding Horizon Control, RHC)方法在t时刻基于系统当前测量的状态值,将长时间尺度最优化控制问题转化为重复进行的短时间尺度控制问题求解,在下一拍中只将最优控制序列中的第一项 应用到系统式(1),基于系统当前状态测量值的预测计算,也解决了由各类非理想因素带来的轨迹偏移问题,RHC思想如图2所示。但即使如此,在线求解所需的计算时间依然无法满足电机控制系统的快速响应要求。
应用到系统式(1),基于系统当前状态测量值的预测计算,也解决了由各类非理想因素带来的轨迹偏移问题,RHC思想如图2所示。但即使如此,在线求解所需的计算时间依然无法满足电机控制系统的快速响应要求。
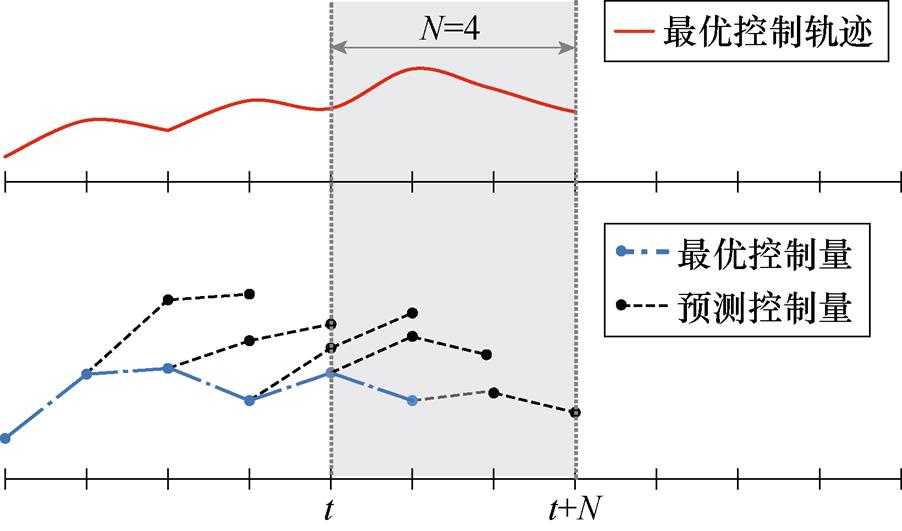
图2 滚动时域控制
Fig.2 Receding horizon control
对于式(8)所示的CFTOC问题,基于运筹学中的多参数规划理论将其转化为多参数二次规划问题(Multiparametric Quadratic Program, Mp-QP)。将状态量看做参数,研究在整个状态范围内的最优解变化趋势,根据Karush-Kuhn-Tucker(KKT)条 件[22]离线求出在不同状态组合下的最优解,显含状态量为
 (9)
(9)
Mp-QP的最优解存在两种情况:在约束条件内部或者在约束条件边界上。根据最优解是否触发约束条件进行临界区域(Critical Region, CR)划分如式(10)所示,CRA(x)为最优解处于约束条件边界时的分区,CRNA(x)为最优解在约束条件内部时的分区。
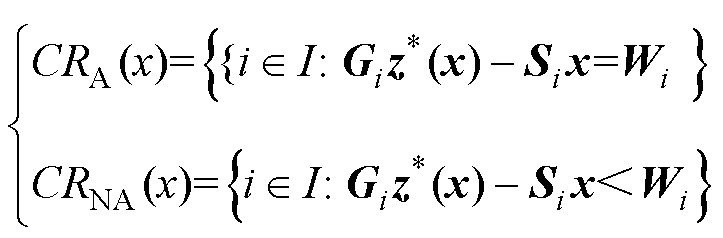 (10)
(10)
式中,i I={1,…, r}为约束条件下标,r为约束条件个数。
I={1,…, r}为约束条件下标,r为约束条件个数。
对于在CRNA(x)分区内的最优解,原问题等效为LQR问题,不再过多讨论。对于约束条件成立的最优解分区CRA(x),基于KKT条件求得在不同约束条件成立下的最优解为

 (11)
(11)
式中, 为关于状态量x(t)的分段仿射函数。
为关于状态量x(t)的分段仿射函数。
将式(11)代入式(7)可得到原CFTOC问题的最优解显式表达如式(12)所示,每个时刻的最优解 都是当前时刻状态量x(t)的函数,在不同的临界分区内对应不同的函数显式表达。
都是当前时刻状态量x(t)的函数,在不同的临界分区内对应不同的函数显式表达。
 (12)
(12)
式中,fi为仿射函数关系;Fi、gi分别为在分区i内最优解和状态量的仿射系数。
EMPC的实现思想完全涵盖RHC的理念,实现逻辑如图3所示,离线计算在不同状态分区下的CFTOC问题最优解,确定在状态空间上关于最优解的显式函数表达,在线控制算法基于状态当前值确定所属临界分区从而得到对应的仿射控制律,只取预测时域内的第一个控制量,作用到系统完成控制。最优控制律以PWA的形式储存在处理器中,由于函数调用中只有乘加运算,不含除法,且分区查询代码也较为简单,大大提高了MPC应用的便利性。
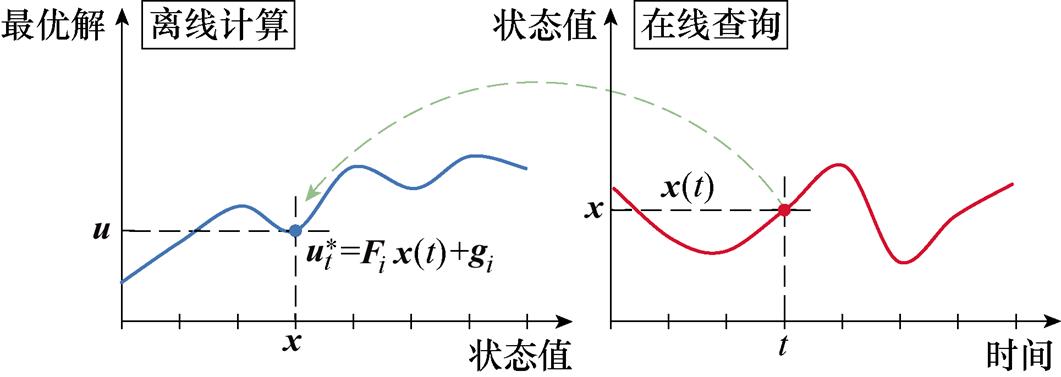
图3 EMPC控制逻辑
Fig.3 EMPC control logic
电机系统MPC可分为级联与非级联控制两种方式,为了实现对于电气环节的快速响应及有效抗扰,基于磁场定向控制(Field Oriented Control, FOC)策略沿用级联控制结构分别实现EMPC电流及转速内外环控制,电机控制框图如图4所示。外环为转速控制,内环为电流控制,分别构建EMPC控制器,外环的输出是内环指令 ,内环输出为转子坐标系电压指令
,内环输出为转子坐标系电压指令 ,采用空间矢量脉冲宽度调制(Space Vector Pulse Width Modulation, SVPWM)策略完成电机控制。
,采用空间矢量脉冲宽度调制(Space Vector Pulse Width Modulation, SVPWM)策略完成电机控制。
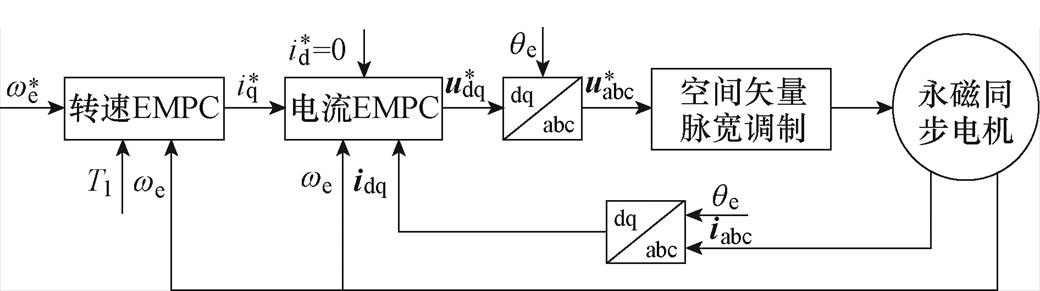
图4 EMPC电机控制框图
Fig.4 EMPC motor control block diagram
EMPC设计第一步是确定系统预测模型及代价函数,PMSM离散化电流控制模型为
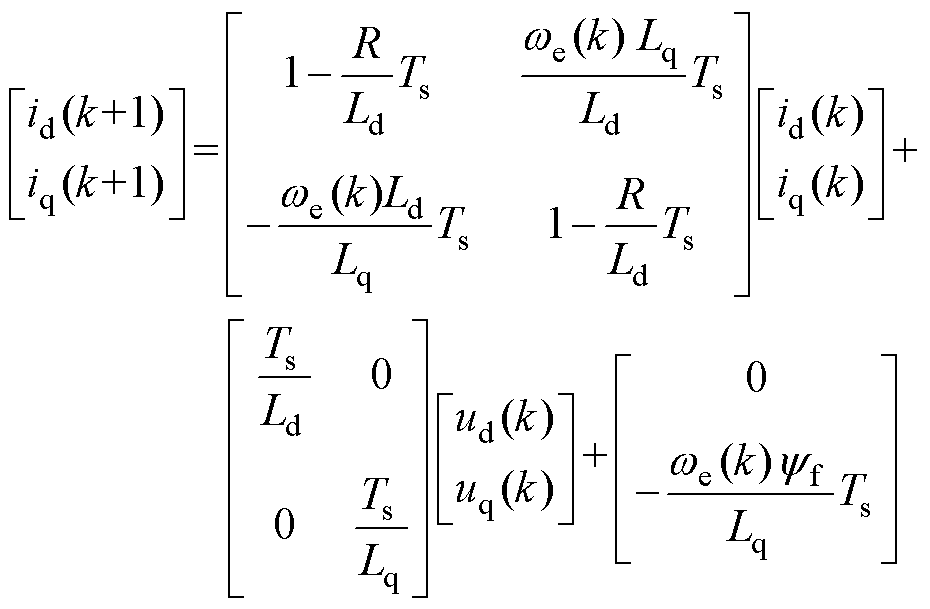 (13)
(13)
式中,ud(k)、uq(k)分别为k时刻电机d、q轴电压;id(k)、iq(k)分别为k时刻电机d、q轴电流; 为k时刻电角速度;R为电机电阻;Ld、Lq分别为d、q轴电感;
为k时刻电角速度;R为电机电阻;Ld、Lq分别为d、q轴电感; 为磁链;Ts为预测模型离散时间步长。
为磁链;Ts为预测模型离散时间步长。
电流模型中存在d、q轴之间的耦合及转速项带来的非线性环节。基于多参数规划理论对其进行参数化建模,由于转速非线性项及耦合项皆可测量,将其看作常数扰动项,作为KKT条件划分临界分区的判定项,此时系统转移矩阵中只存在与电机参数及离散步长有关的常数项,解决了d、q轴之间的耦合问题,实现了PMSM电气环节线性化建模。电机控制中以实现d、q轴电流指令跟踪为目标,为实现无静差跟踪,将电流指令值 增补到状态项中,电流控制模型为
增补到状态项中,电流控制模型为
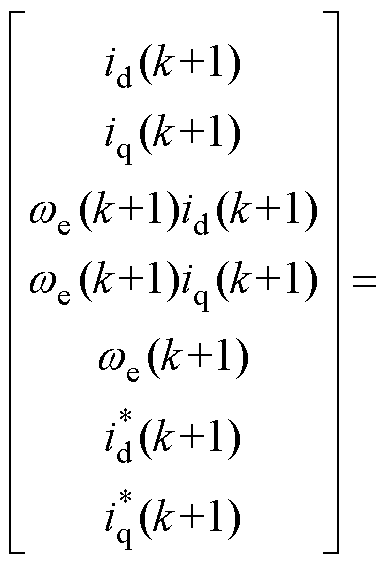
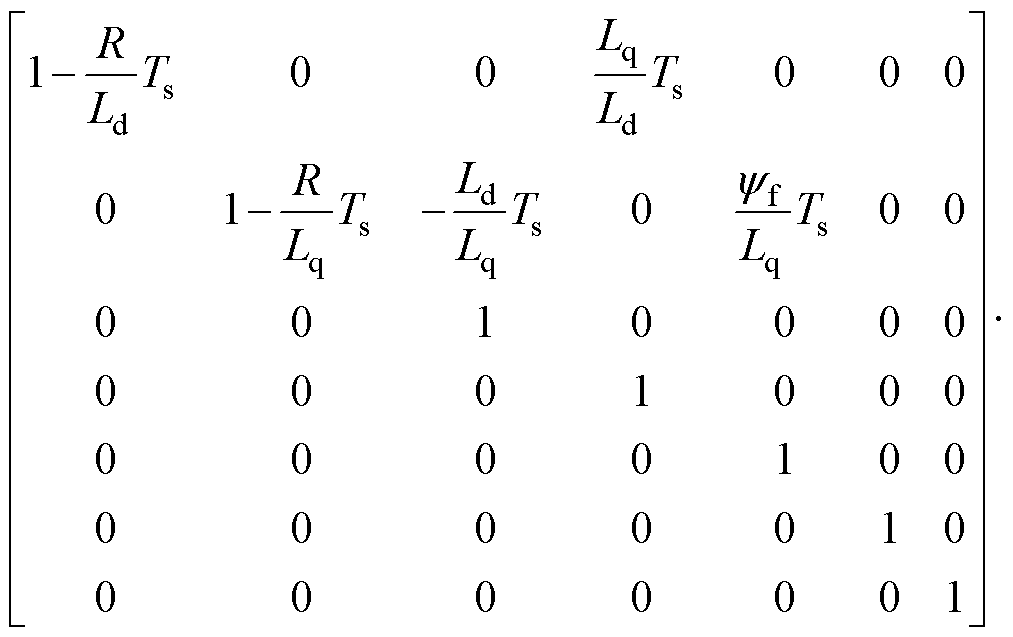
 +
+
 (14)
(14)
预测模型确定后要定义代价函数,以求得在预测时域满足控制目标的最优控制量,定义EMPC电流控制代价函数为
 (15)
(15)
式中,Pc为电流控制权重系数。
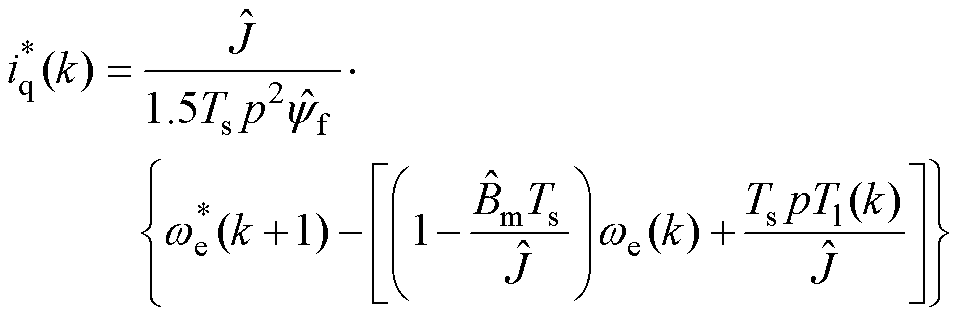
EMPC电机转速外环模型为
 (16)
(16)
式中, 、Tl(k)分别为k时刻的转速指令及负载扰动;p为电机极对数;Bm为阻尼系数;J为转动 惯量。
、Tl(k)分别为k时刻的转速指令及负载扰动;p为电机极对数;Bm为阻尼系数;J为转动 惯量。
在电机级联控制中,转速外环的输出为电流内环的q轴电流指令,以转速跟踪为控制目标,定义转速外环代价函数为
 (17)
(17)
式中,Ps为转速控制权重系数。
预测模型的建立需要考虑离散步长,离散步长越小意味着模型越精确。确定了预测时域及代价函数后,模型离散步长直接表征预期的响应时间及控制量大小,因此首先要考虑控制对象的时间常数,避免出现控制量更新频率太快而系统无法响应的情况。对于电机系统而言,内外环的时间常数差异较大,采用非级联控制可能会出现二者性能难以兼顾的问题,级联控制方式的优势体现在可以对内外环选用不同的离散步长以满足各自需求。本次实验功率器件选择ABB公司的5SNG 1000X170300的IGBT,开关频率设置为5 kHz,电流、位置、转速等参与控制信息的采样频率设置为5 kHz,电流环电气时间常数较小,能够实现较快的动态响应,与逆变器频率保持一致为5 kHz,转速环机械时间常数较大,可选择数倍慢于内环的控制频率运行,经多次仿真与实验,设置为500 Hz,有
 (18)
(18)
此外还需要考虑预测时域N的选择,其表示对于系统未来状态预测的拍数,等于待求解最优化控制问题及最优解的维度,TsN表示在本次求解中待预测的绝对时间跨度,因此N越长,对于系统未来的预测越全面,随之也会加剧问题求解的难度,导致临界分区数激增,由于RHC策略的存在,预测时域只需要能够包含系统动态特性即可。对于级联控制而言,无论是从电压指令给出到电流响应,还是从电流指令给出到转速响应,考虑到数字控制的延迟特性,选择预测时域N=3可保证对于系统未来实现完整的预测。值得一提的是,由于约束条件的存在,使得跟踪误差最小的最优解未必能在预测时域内完成指令跟踪。
EMPC中以不等式约束形式对状态量及控制量限定边界,纳入到最优化控制问题的求解。电机系统在工作中受到的主要约束为电压及电流约束,电压约束是指电机最大输出电压受到电源限制,电流约束由电机温升和功率器件所决定,有
 (19)
(19)
式中,udc为直流母线电压;Umax为逆变器基于SVPWM方法能产生的最大相电压峰值;电流约束由电机温升和功率器件所决定,Imax为电机相电流最大值。
EMPC问题不能处理如式(19)所示的非线性约束,以多边形近似的方式将其转化为线性约束如式(20)所示,EMPC电压及电流约束限制如图5所示。
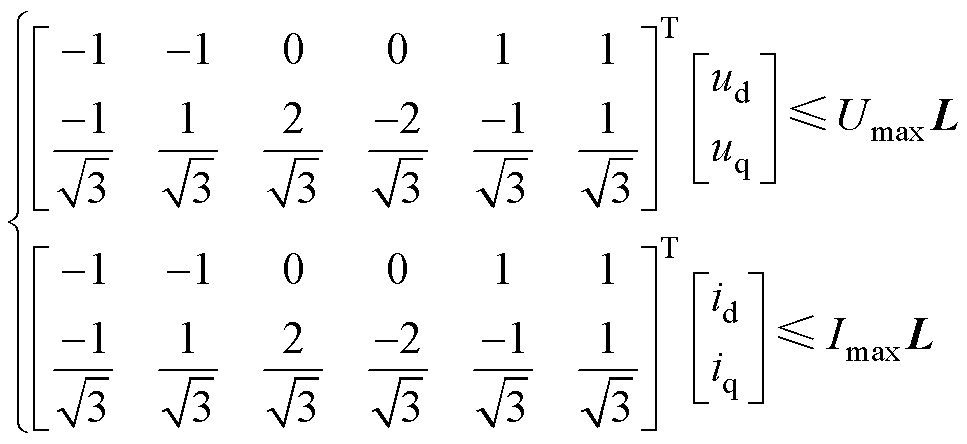
其中
 (20)
(20)
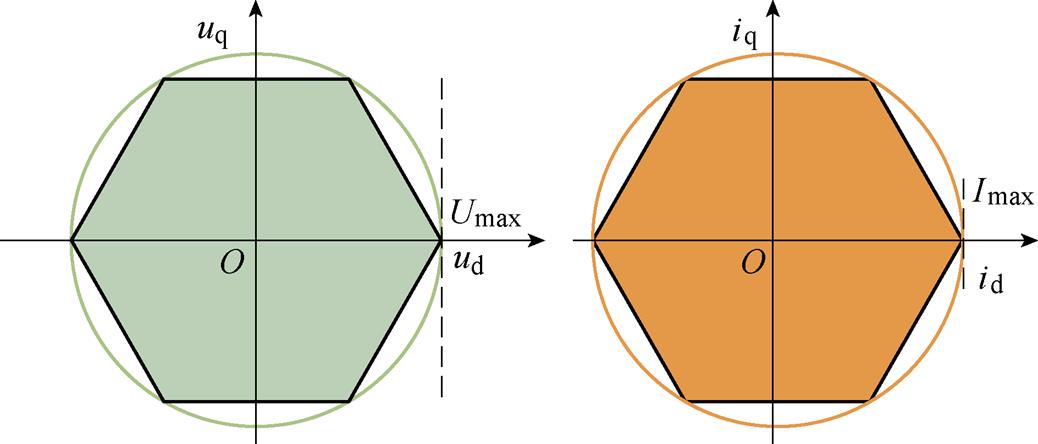
图5 电压及电流约束
Fig.5 Voltage and current constrains
转速外环控制在电流约束的基础上,定义转速约束以及负载转矩约束为
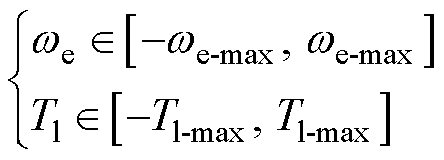 (21)
(21)
式中, 、
、 分别为转速及负载转矩的约束最大值。
分别为转速及负载转矩的约束最大值。
由于约束条件的存在,EMPC不具备统一的解析解形式,约束条件的存在有两方面影响:一是对于控制量的直接约束;二是基于状态约束反推的间接约束。以指令跟踪为目标,在约束条件未激活的主分区内,分析参数失配的影响,定义在第k拍的代价函数为
 (22)
(22)
式中, 为惩罚系数矩阵。
为惩罚系数矩阵。
对控制量求梯度为0,得到在k拍的无约束最优解为

 (23)
(23)
依照式(13)推导的电流控制模型,将式(13)代入式(23),得到电流内环在k拍的最优解为
 (24)
(24)
式中, 、
、 、
、 、
、 为模型离线求解所用参数。
为模型离线求解所用参数。
在不考虑数字延时及逆变器等非线性等因素引起的电压偏差下,令 ,将式(24)电压指令代入式(13)电流预测方程,得到第k+1拍电流为
,将式(24)电压指令代入式(13)电流预测方程,得到第k+1拍电流为
 (25)
(25)
求得k+1拍电流误差如式(26)所示,当参数误差皆为0时,电流误差为0。
 (26)
(26)
式中, 分别为d、q轴电流误差;
分别为d、q轴电流误差; 、
、 、
、 、
、 为各项电气参数误差。
为各项电气参数误差。
在id=0工况下,d轴电流误差主要受Lq影响;q轴电流受Lq、R、 影响,且随着k+1拍电流指令与k拍电流值的差值越大,电感误差的影响也越明显。在id(k)=0 A、iq(k)=10 A、
影响,且随着k+1拍电流指令与k拍电流值的差值越大,电感误差的影响也越明显。在id(k)=0 A、iq(k)=10 A、 =80π rad/s工况下,给定电流指令
=80π rad/s工况下,给定电流指令
 、
、
 ,各项参数失配对于电流误差的影响如图6所示。
,各项参数失配对于电流误差的影响如图6所示。
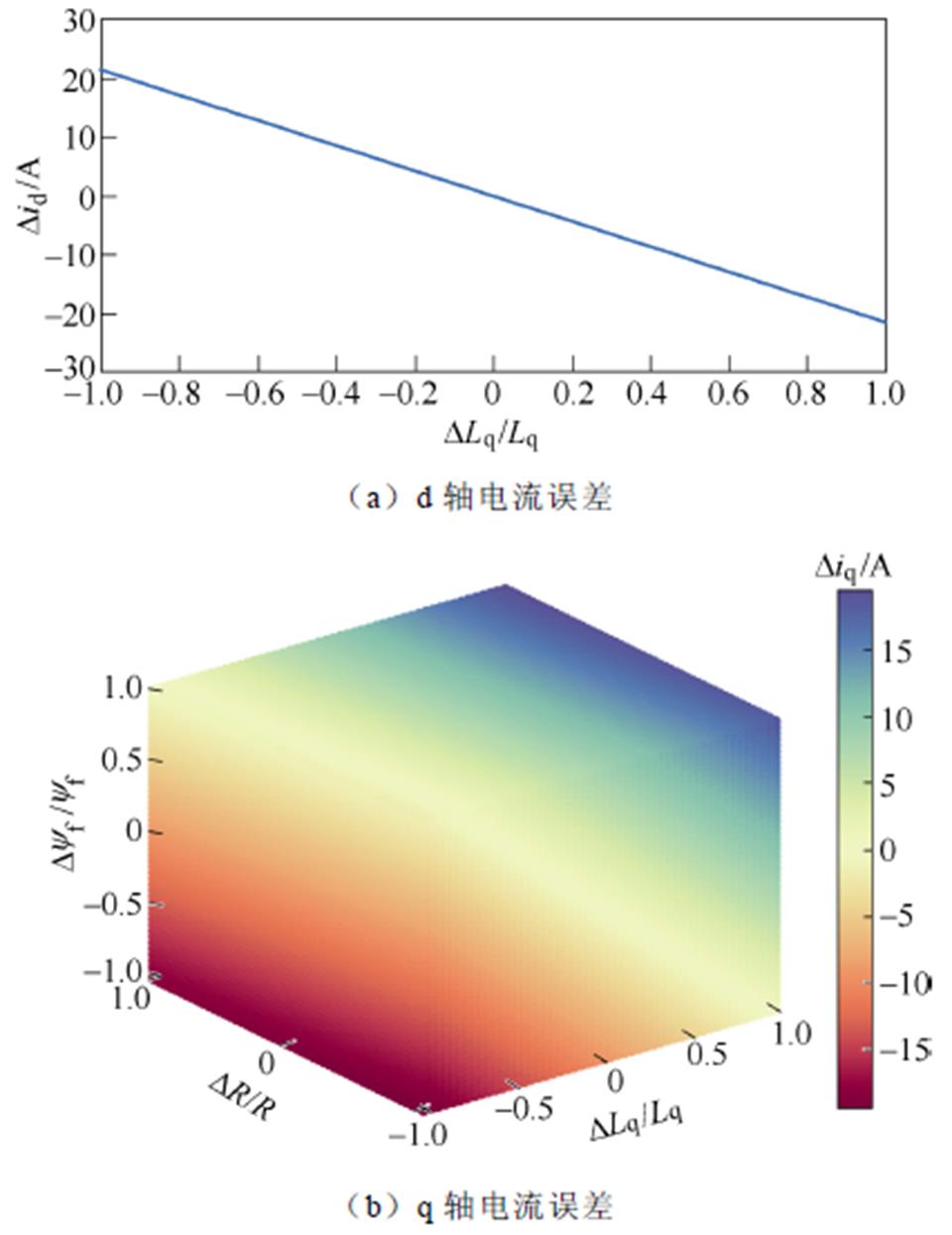
图6 dq轴电流误差示意图
Fig.6 Diagram of dq axis current error
将式(16)代入式(23),转速外环在k拍的最优解为
 (27)
(27)
式中, 为模型离线求解所用参数。
为模型离线求解所用参数。
将式(27)代入转速预测方程式(16),k+1拍转速为
 (28)
(28)
k+1拍转速误差如式(29)所示, =60π rad/s工况下,给定电角速度指令
=60π rad/s工况下,给定电角速度指令 =80π rad/s,各项参数失配对于转速误差影响如图7所示。
=80π rad/s,各项参数失配对于转速误差影响如图7所示。
 (29)
(29)
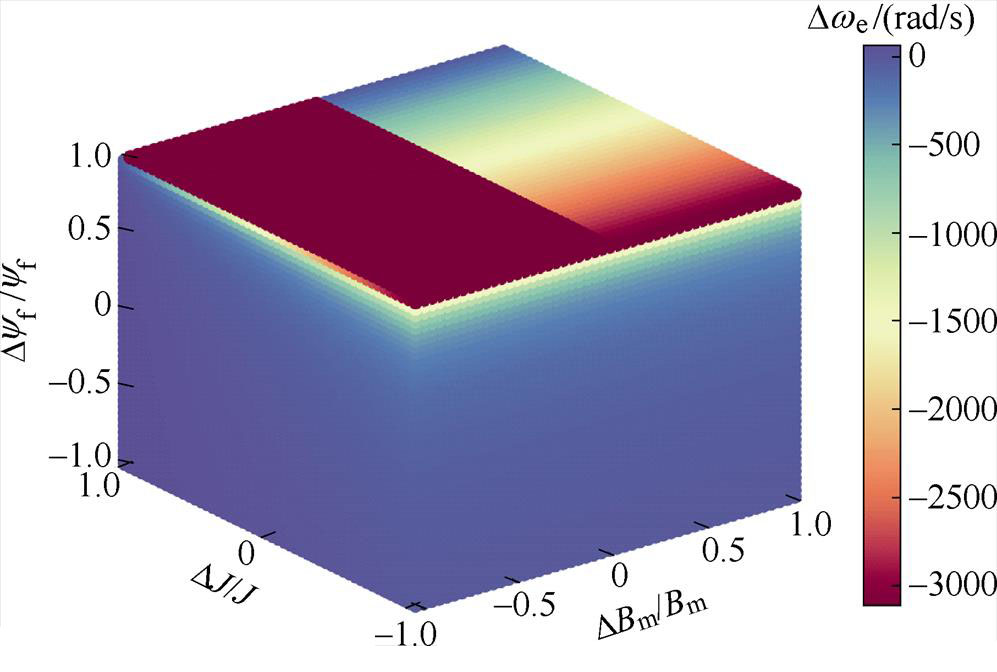
图7 电角速度误差示意图
Fig.7 Diagram of electric angular velocity error
DSP的数字延时特性也属于模型失配范畴,数字控制时序如图8所示,简而言之,即数字延时导致电压指令无法即刻生效,在MPC的应用中将会引起电流振荡甚至失稳[23]。
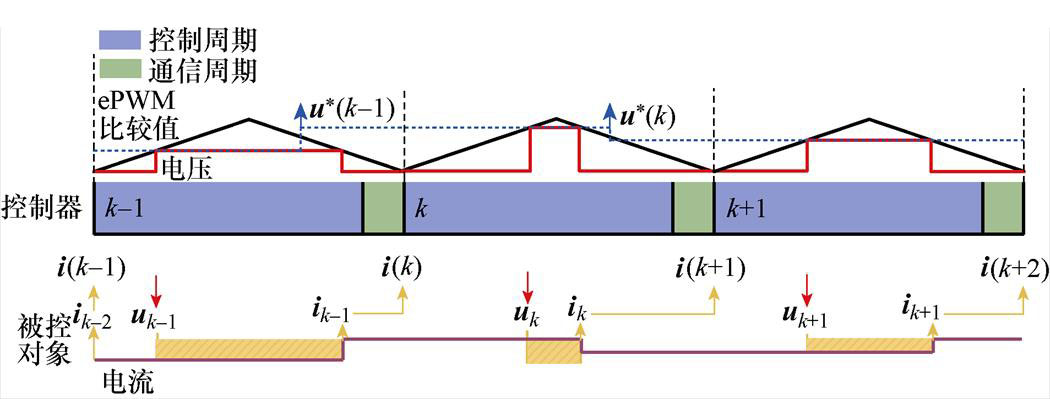
图8 DSP控制时序
Fig.8 DSP control timing diagram
定义uk、ik分别为第k拍的真实电压、电流,u*(k)为第k拍计算得到的指令电压,i(k)为第k拍的采样电流,二者关系为
 (30)
(30)
在k-1拍计算的电压指令u*(k-1),在k拍下发,记为uk,经过一拍的作用产生电流ik,并于k+1拍采样,即期望在k+1拍采样的电流值到达指令值,需要于k-1拍进行计算,于k拍下发,有
 (31)
(31)
其中
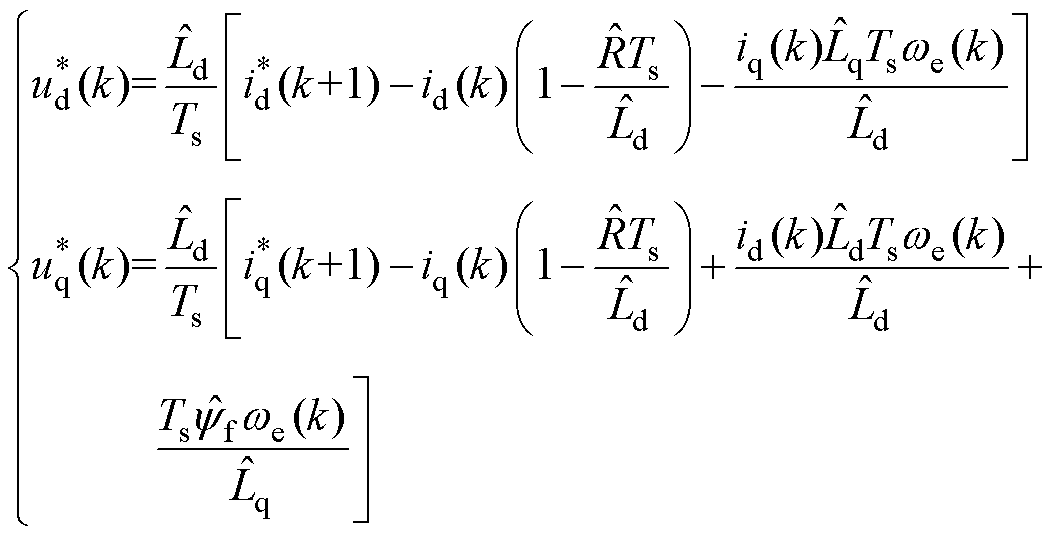
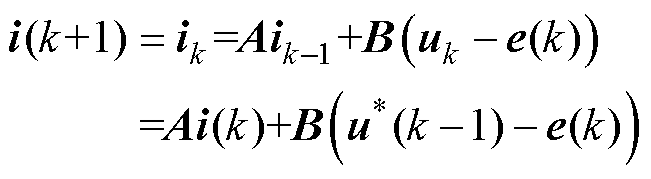
以电流指令i*(k+1)替换i(k+1),结合式(12)最优控制量的EMPC表达,则在k-1拍的最优解表达如式(32)所示,显而易见此时式中i(k)属于未知项,基于电气方程以电流预测值 代替,如式(33)所示。
代替,如式(33)所示。
 (32)
(32)
 (33)
(33)
由此可知,在k-1拍的求解过程分为两个步骤:第一步是基于k-2拍的电压指令电压与k-1拍采样电流i(k-1)计算在k拍的采样电流;第二步是基于i(k)与k+1拍的电流指令值,求解指令电压u*(k-1),将式(32)中计算所需变量皆以采样值表示,改写为
 (34)
(34)
为方便理解,k拍待求的最优解u*(k)的表达式为
 (35)
(35)
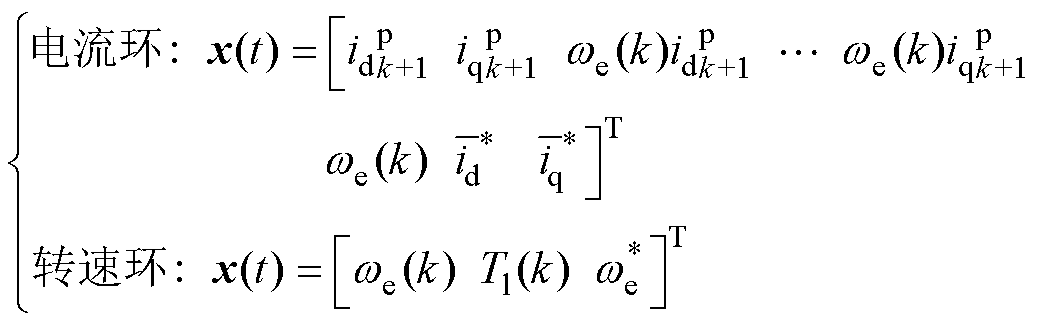
体现在EMPC数字控制过程中,即电流环在k拍进行临界分区查询时使用预测得到的k+1拍电流预测值 作为输入,如式(36)所示,转速环采样频率10倍于转速环控制频率,因此不必做转速预测。
作为输入,如式(36)所示,转速环采样频率10倍于转速环控制频率,因此不必做转速预测。
 (36)
(36)
在数字控制中还需要考虑角度延时带来的问题。在FOC策略中,磁场定位的准确性直接影响控制性能,当电压指令作用到电机时,转子已经转过了一定的角度,有
 (37)
(37)
式中, 为
为 拍的角度误差。磁场定位偏差意味着电压指令偏差,由于MPC本身不具有对误差的调节能力,因此会使得控制目标偏离运行轨迹,且随着转速升高,角度延时可能会引起控制失稳[25]。因此角度补偿也是MPC应用中不可或缺的部分。
拍的角度误差。磁场定位偏差意味着电压指令偏差,由于MPC本身不具有对误差的调节能力,因此会使得控制目标偏离运行轨迹,且随着转速升高,角度延时可能会引起控制失稳[25]。因此角度补偿也是MPC应用中不可或缺的部分。
在EMPC应用中,逆变器非线性将带来两方面影响:一是死区电压使得EMPC电压指令与作用到电机的真实电压有区别,产生预测误差,进而导致求解的最优控制量误差[26],由于缺乏对于跟踪误差的校正机制,控制目标将出现偏置误差;二是死区电压将会产生高次电流谐波,引起转矩脉动[27-29]。
考虑逆变器非线性效应的负载对地电压Vag为
 (38)
(38)
式中,Vce、Vd分别为功率器件管压降及二极管压降;Ta为A相导通时间;Tsw为逆变器开关周期;ia为A相电流;sign(ia)为A相电流符号,定义由逆变器流向负载为正方向。可知,开关周期内的平均电压由导通时间及电流流向决定。
可求得A相电压为
 (39)
(39)
式中,Tb、Tc分别为B、C相导通时间。
死区时间内上下桥臂处于关闭状态,负载通过续流二极管被钳位至udc或0,死区效应下有效导通时间为
 (40)
(40)
式中,M为导通时间偏差; 为A相理想导通时间;Ton、Toff、Td分别为功率器件开通、关闭及死区时间。
为A相理想导通时间;Ton、Toff、Td分别为功率器件开通、关闭及死区时间。
在死区影响下的A相电压为
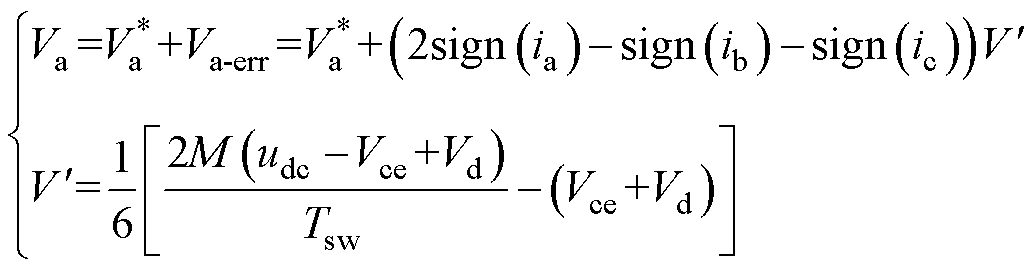 (41)
(41)
式中, 为A相理想电压;Va-err为死区引起的A相失真电压;
为A相理想电压;Va-err为死区引起的A相失真电压; 为失真电压幅值。可知,在相电压坐标系上死区失真电压随电流方向呈六步阶梯波变化,如图9所示。因此在EMPC应用中需要进行死区补偿。
为失真电压幅值。可知,在相电压坐标系上死区失真电压随电流方向呈六步阶梯波变化,如图9所示。因此在EMPC应用中需要进行死区补偿。
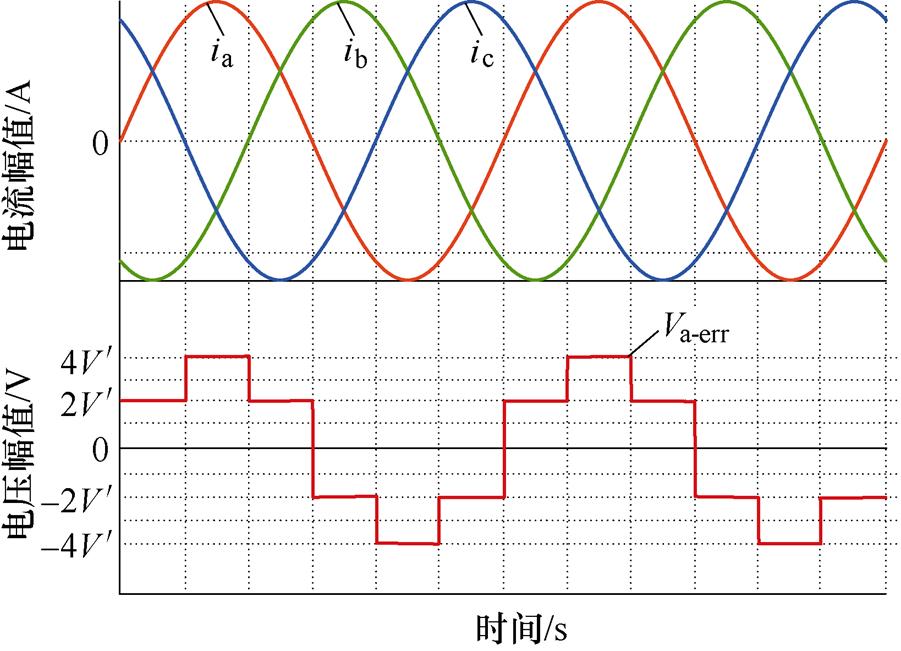
图9 死区失真电压(A相)
Fig.9 Dead zone distortion voltage (phase A)
体现在DSP数字化实现过程中,对EMPC查询得到的最优电压控制量进行电压重构,首先将三相失真电压变换到dq坐标系,有
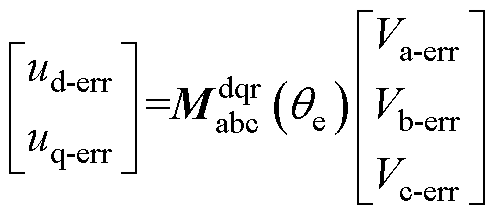 (42)
(42)
式中, 、
、 分别为d、q轴失真电压;
分别为d、q轴失真电压; 、
、 分别为B、C相失真电压;
分别为B、C相失真电压; 为定子ABC坐标系到旋转dqr坐标系的变换矩阵。在进入SVPWM发波环节之前,更新电压指令
为定子ABC坐标系到旋转dqr坐标系的变换矩阵。在进入SVPWM发波环节之前,更新电压指令 为
为
 (43)
(43)
模型失配是MPC算法在应用中的共性问题,包括预测模型之外的扰动及模型内参数失配[30-31],2.3~2.5节皆属于模型失配范畴。由于EMPC的最优控制量只取决于当前状态值,与历史无关,因此无法保证系统实现无静差跟踪,常见的方法是构建扰动模型[32-33]或者在环路中加入积分器[2]。本文构建非线性积分环节为
 (44)
(44)
式中,Ks、Kc分别为转速及电流环误差积分系数; 、
、 分别为初始转速、dq轴电流指令;
分别为初始转速、dq轴电流指令; 、
、 分别为更新后的转速、电流控制指令,在EMPC查询时代替原指令。非线性积分环节看作是对于失配部分的建模,可以较为普适地解决由各类非理想因素带来的跟踪误差问题,且EMPC最优解是基于约束条件得到的,不会出现在PI控制中的积分饱和现象。
分别为更新后的转速、电流控制指令,在EMPC查询时代替原指令。非线性积分环节看作是对于失配部分的建模,可以较为普适地解决由各类非理想因素带来的跟踪误差问题,且EMPC最优解是基于约束条件得到的,不会出现在PI控制中的积分饱和现象。
体现在EMPC数字化实现过程中,即在k拍进行临界分区查询时将式(36)所示的状态量更新为
 (45)
(45)
基于KKT条件的CFTOC问题离线求解需要进行约束条件与最优解的逻辑判定。随着系统状态量维度的增高,人工求解的难度大大提升,本文使用基于Matlab软件的多参数工具箱(Multi-Parametric Toolbox 3.0)完成问题定义及求解[34]。按照2.1节、2.2节定义的问题及约束条件,定义母线电压约束峰值udc=150 V,电流峰值Imax=100 A,预测时域N=3,算法实现流程如图10所示,左侧为离线部分,展示从系统定义到最优控制律代码生成的过程,并标注了MPT3工具箱相关函数,主要函数用法在本文附录中展示;右侧为在线部分,展示最优控制律查询及相关非理想因素补偿策略。
在电流控制中,由于状态维度过高,为展示分区效果,定义电角速度=80π rad/s,控制指令 , ,d、q轴电流临界分区如图11所示,图中每一个色块代表一个临界分区,对应不同的最优控制量显式表达,第一个临界分区CR1的最优解显示表达如式(46)所示,包含3个预测步长的最优控制量,分区在图11中以白色色块标出。不同分区内的最优代价函数如图12所示。根据式(15)定义代价函数定义,当J=0时系统可以完成无静差跟踪。由图12可知,在当前可行域内,所有分区都存在最优解满足J=0。
,d、q轴电流临界分区如图11所示,图中每一个色块代表一个临界分区,对应不同的最优控制量显式表达,第一个临界分区CR1的最优解显示表达如式(46)所示,包含3个预测步长的最优控制量,分区在图11中以白色色块标出。不同分区内的最优代价函数如图12所示。根据式(15)定义代价函数定义,当J=0时系统可以完成无静差跟踪。由图12可知,在当前可行域内,所有分区都存在最优解满足J=0。
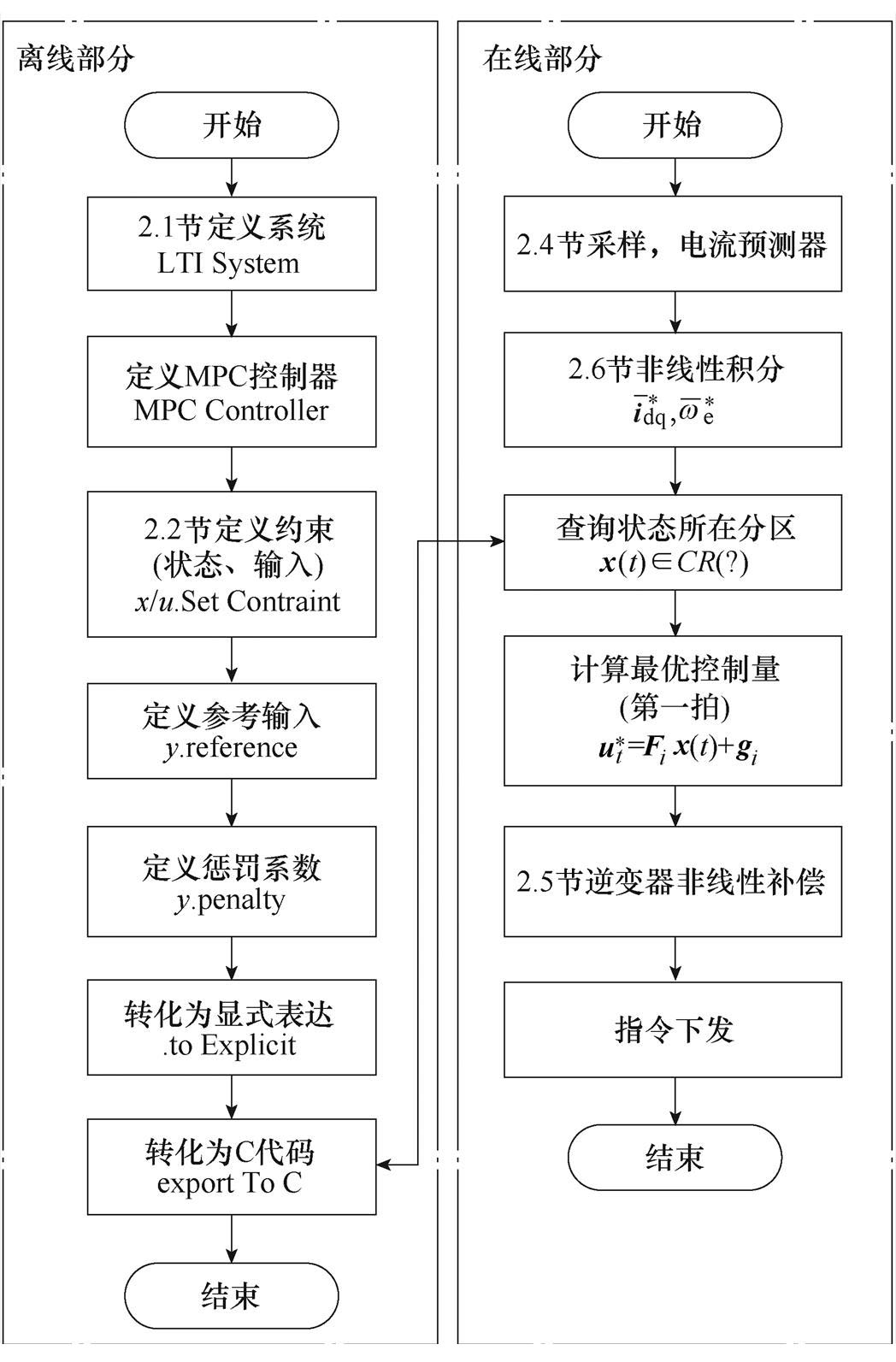
图10 EMPC流程
Fig.10 EMPC flow chart
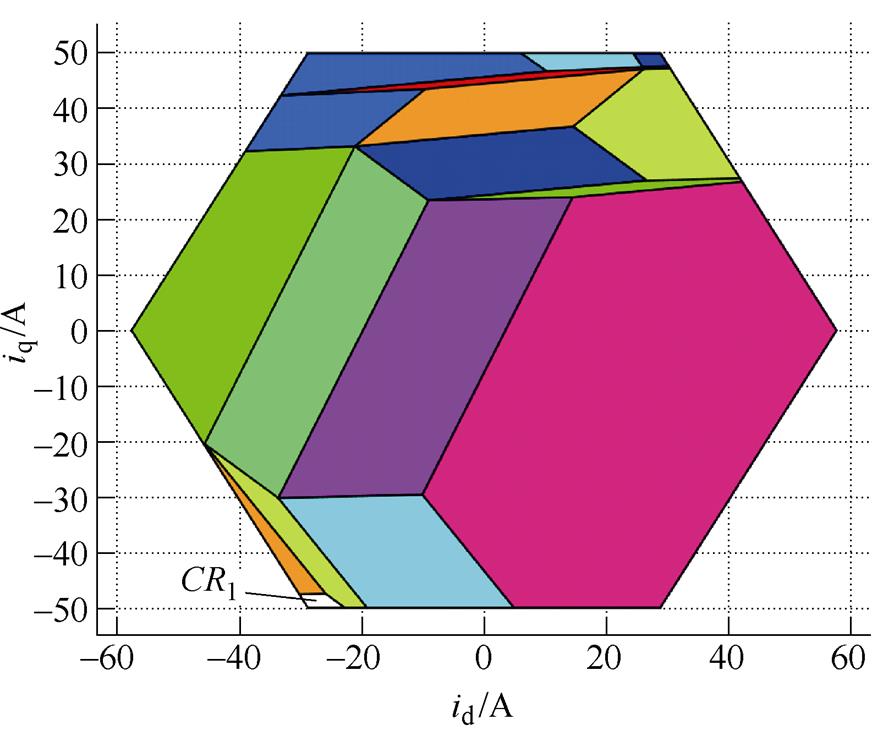
图11 EMPC临界分区-电流控制
Fig.11 EMPC critical region-current control
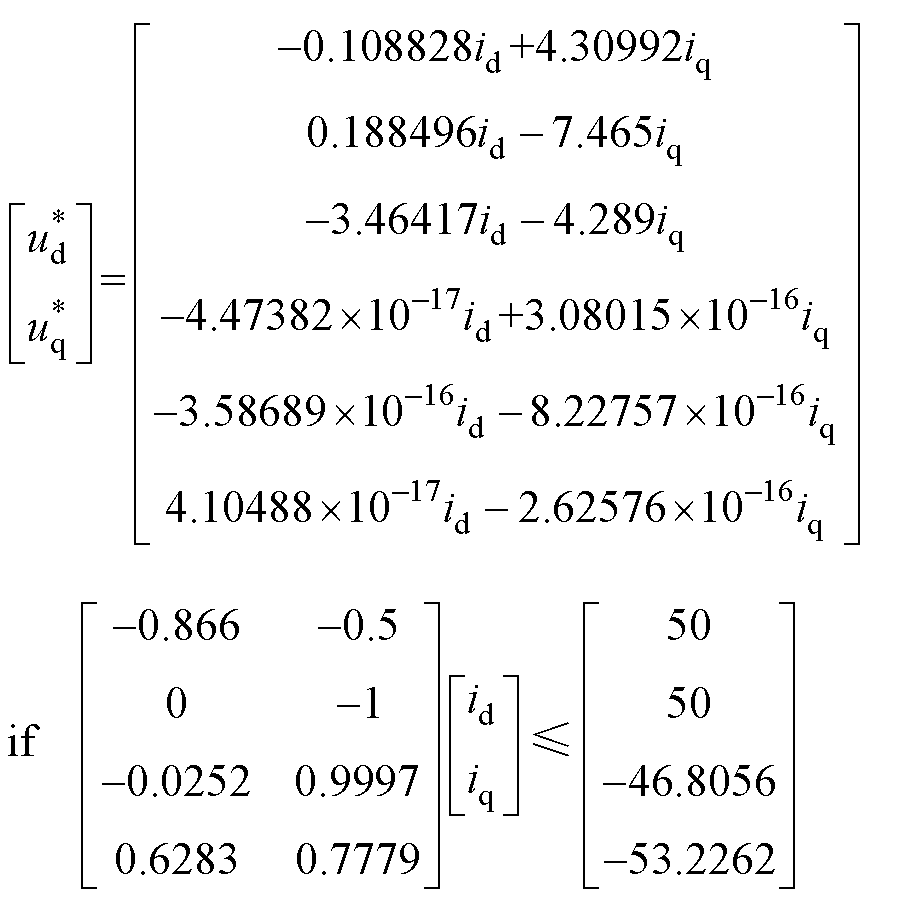 (46)
(46)
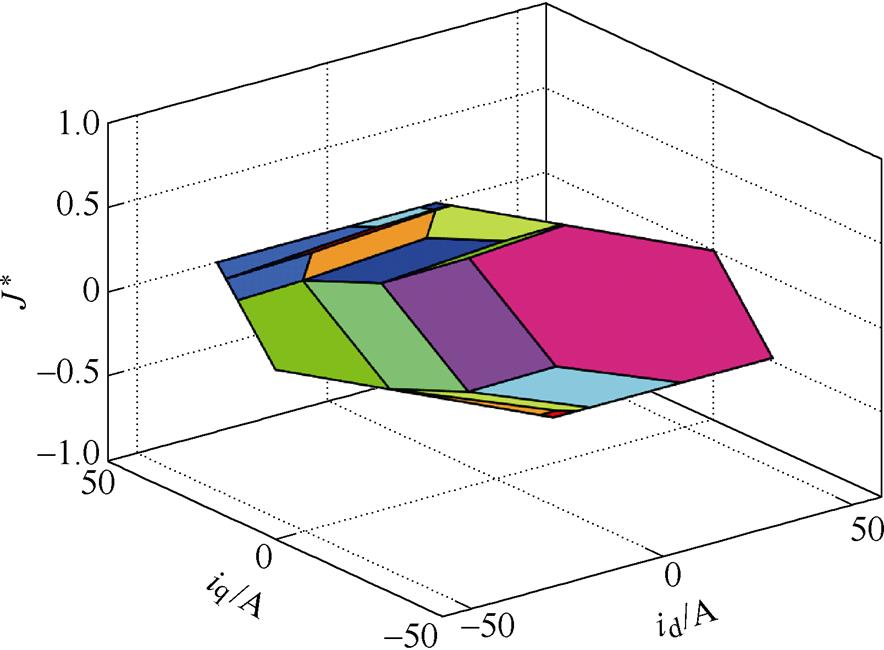
图12 不同分区内的最优代价函数-电流控制
Fig.12 Optimal cost functions within different partitions-current control
转速控制定义电角速度约束 =1 000 rad/s,负载转矩约束Tl-max=200 N·m,定义电角速度指令
=1 000 rad/s,负载转矩约束Tl-max=200 N·m,定义电角速度指令 =80π rad/s,预测时域N=3。该工况下的临界分区如图13所示,第一个临界分区CR1的最优解显示表达如式(47)所示,在图13中以白色色块标出,图中灰色色块为无解区,即在该区域内无法满足式(4)的可行集定义。
=80π rad/s,预测时域N=3。该工况下的临界分区如图13所示,第一个临界分区CR1的最优解显示表达如式(47)所示,在图13中以白色色块标出,图中灰色色块为无解区,即在该区域内无法满足式(4)的可行集定义。
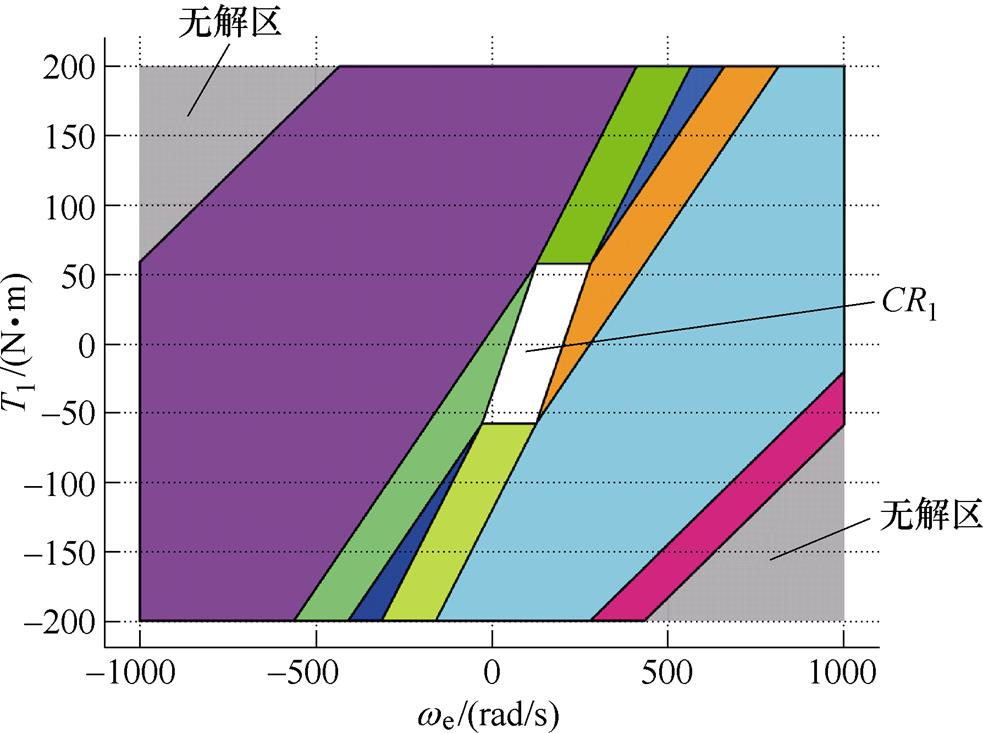
图13 EMPC临界分区-转速控制
Fig.13 EMPC critical region-speed control
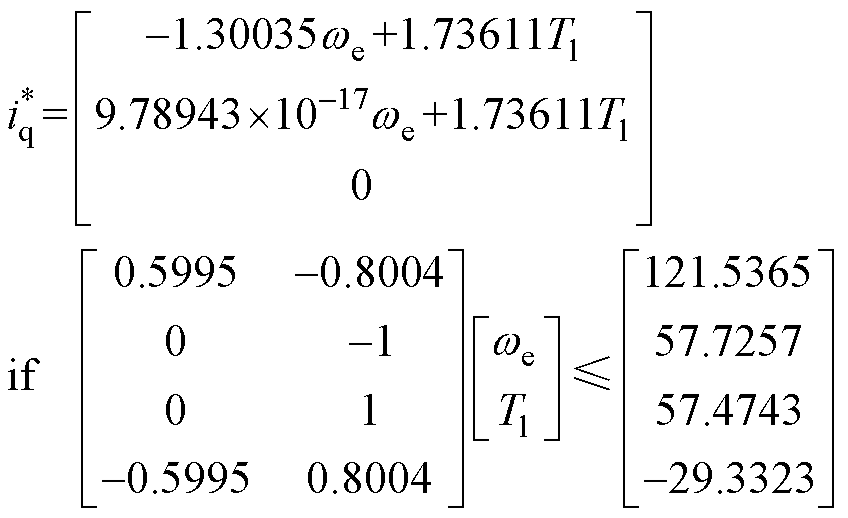 (47)
(47)
不同分区内的最优代价函数如图14所示,可知除无解分区外,还存在代价函数不等于0的分区,即约束条件的存在使得最优解在预测时域内无法完成跟踪目标。
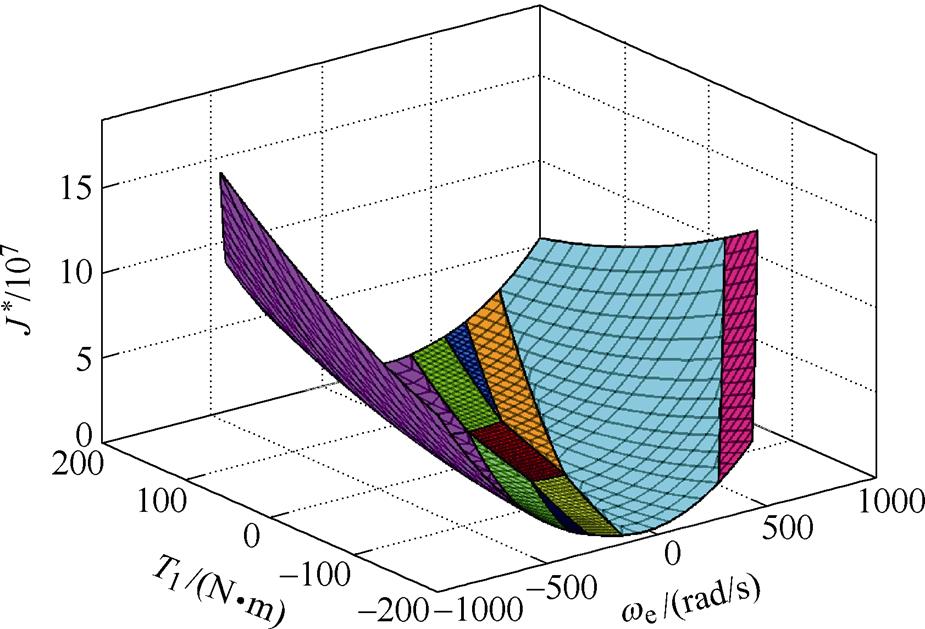
图14 EMPC临界分区-转速控制
Fig.14 EMPC critical region-speed control
为验证EMPC电机控制算法的有效性及2.3~2.6节对于模型失配、逆变器非线性等问题的分析。基于Simulink仿真平台搭建仿真模型,仿真工况如下:直流母线电压为150 V,逆变器开关频率为fs=5 kHz,功率器件死区时间设置为3 ms,仿真电机参数与实验电机保持一致,见表1。前文参照电机系统建模,电机转速约束及指令皆以电角速度 表示,在后文仿真与实验中电流与转速控制设定工况保持不变,为方便理解,统一以电机转速n表示。
表示,在后文仿真与实验中电流与转速控制设定工况保持不变,为方便理解,统一以电机转速n表示。
电流控制仿真设定永磁同步电机工作在转速模式,运行工况n=600 r/min(=80π rad/s),于0.02 s处给定电流阶跃指令 ,
, 。图15a、图15b分别展示d、q轴电流在各项参数失配下的跟踪情况及加入非线性积分后的控制效果,参数失配设置为真实参数的2倍,即算法中所用电阻、dq轴电感、磁链参数皆设置为真实参数的2倍。结合式(26)分析结果可知,d轴电流稳态精度受Lq参数影响较大,q轴电流稳态精度受
。图15a、图15b分别展示d、q轴电流在各项参数失配下的跟踪情况及加入非线性积分后的控制效果,参数失配设置为真实参数的2倍,即算法中所用电阻、dq轴电感、磁链参数皆设置为真实参数的2倍。结合式(26)分析结果可知,d轴电流稳态精度受Lq参数影响较大,q轴电流稳态精度受 参数影响较大,当加入非线性积分环节后,可以有效消除由参数失配带来的稳态误差,但是会对系统的动态性能造成一定影响,图中展示了在不同积分系数下的控制效果,在本文后续实验中选择非线性积分系数Kc=0.02。
参数影响较大,当加入非线性积分环节后,可以有效消除由参数失配带来的稳态误差,但是会对系统的动态性能造成一定影响,图中展示了在不同积分系数下的控制效果,在本文后续实验中选择非线性积分系数Kc=0.02。
表1 永磁同步电机参数
Tab.1 Parameters of PMSM
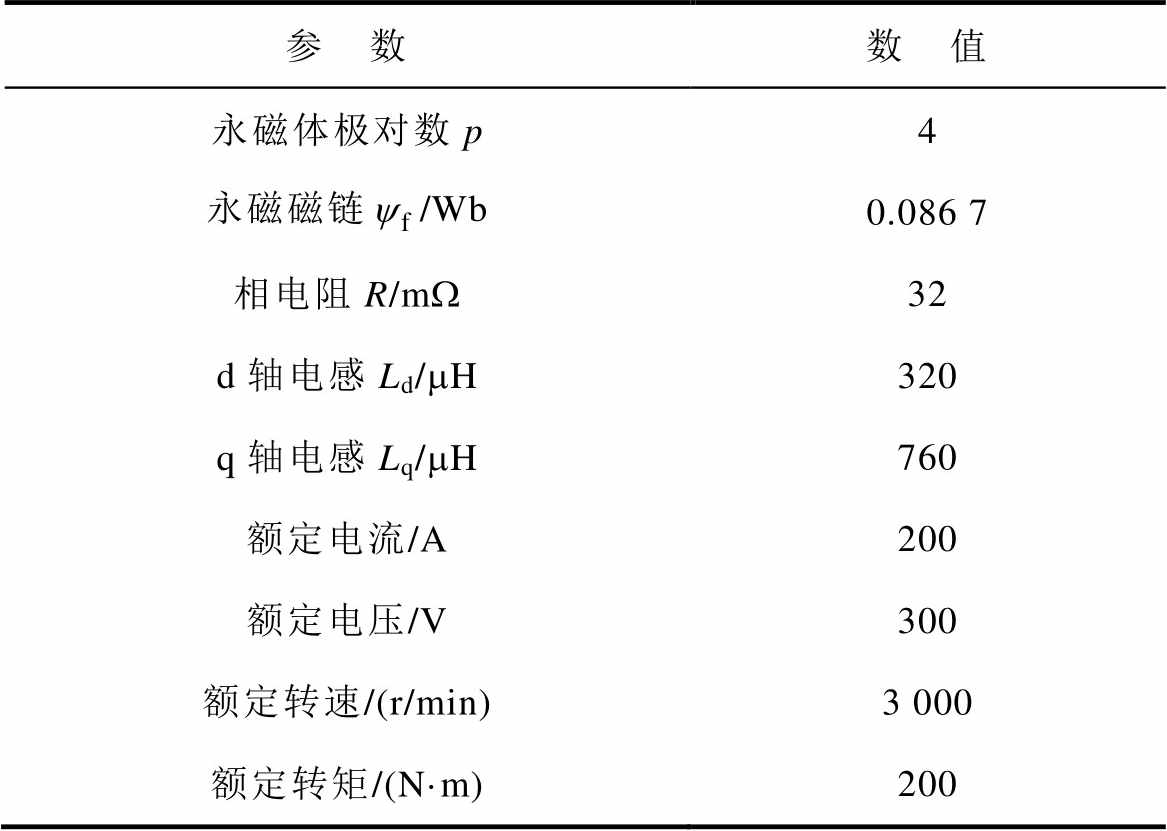
参 数数 值 永磁体极对数p4 永磁磁链/Wb0.086 7 相电阻R/mW32 d轴电感Ld/mH320 q轴电感Lq/mH760 额定电流/A200 额定电压/V300 额定转速/(r/min)3 000 额定转矩/(N·m)200
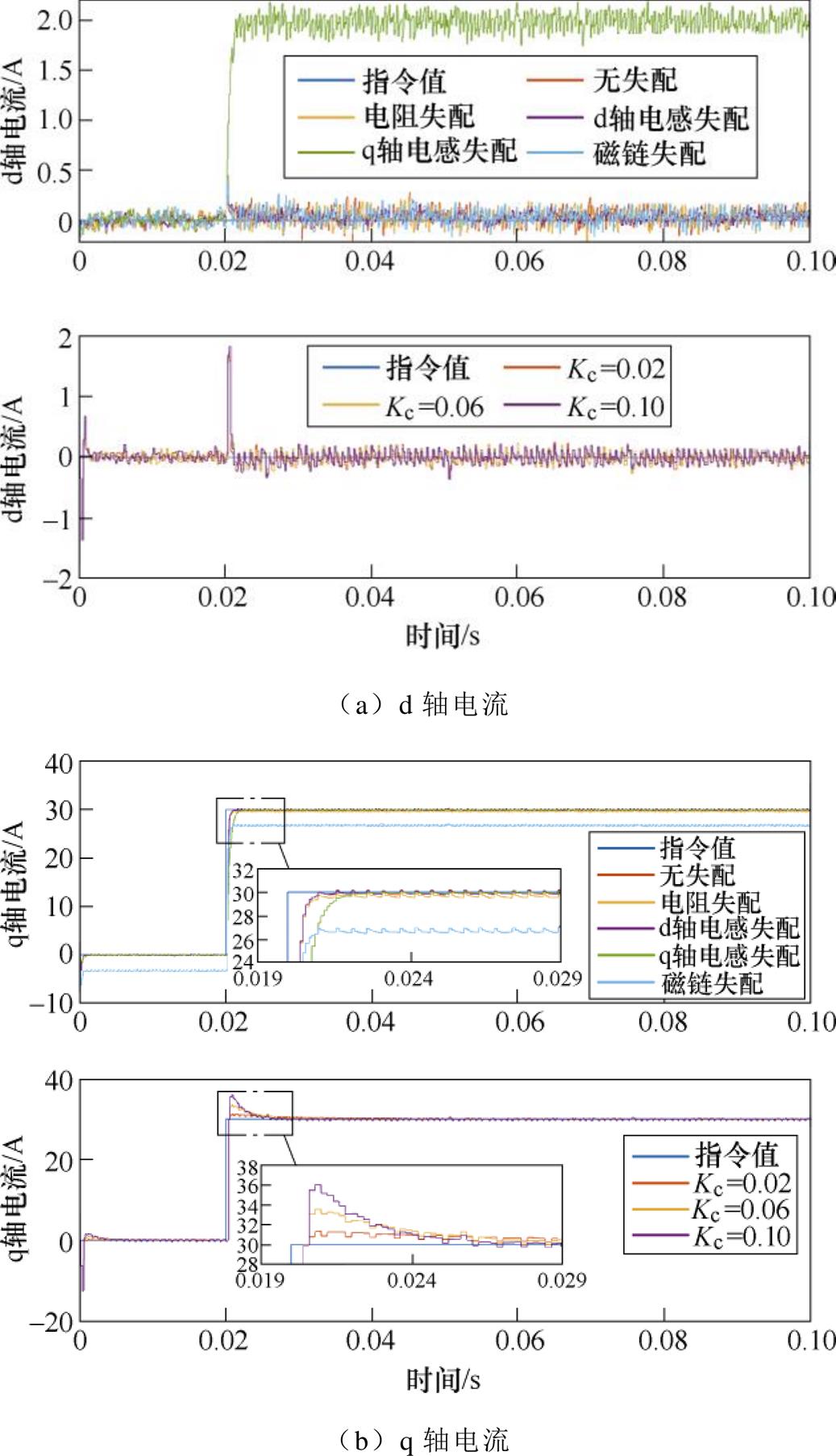
图15 参数失配-电流控制仿真
Fig.15 Parameter mismatch-current control simulation
图16a、图16b为死区影响下的EMPC电流控制效果,图16c为d、q电流快速傅里叶变换(Fast Fourier Transform, FFT)分析,二者皆出现了明显的6次谐波,且q轴电流已经无法完成指令跟踪。基于式(41)~式(43)进行电压重构后有效解决了偏置误差及电流谐波的问题。
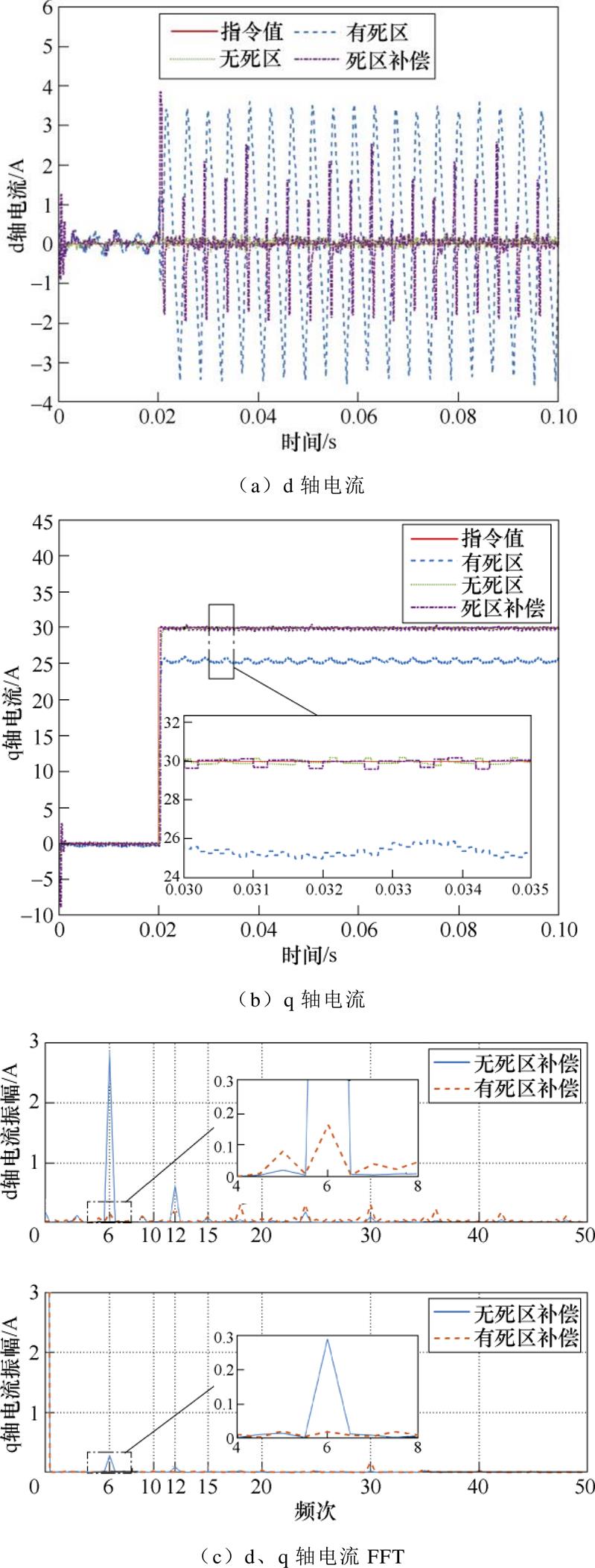
图16 死区效应-电流控制仿真
Fig.16 Deadzone effect-current control simulation
图17a、图17b展示d、q轴电流由DSP数字延时及角度延时带来的影响,以及基于式(35)~式(37)的补偿效果。如2.4节分析,数字延时将导致大幅电流振荡,角度延时导致FOC磁场定位偏差,在d轴上出现偏置误差。
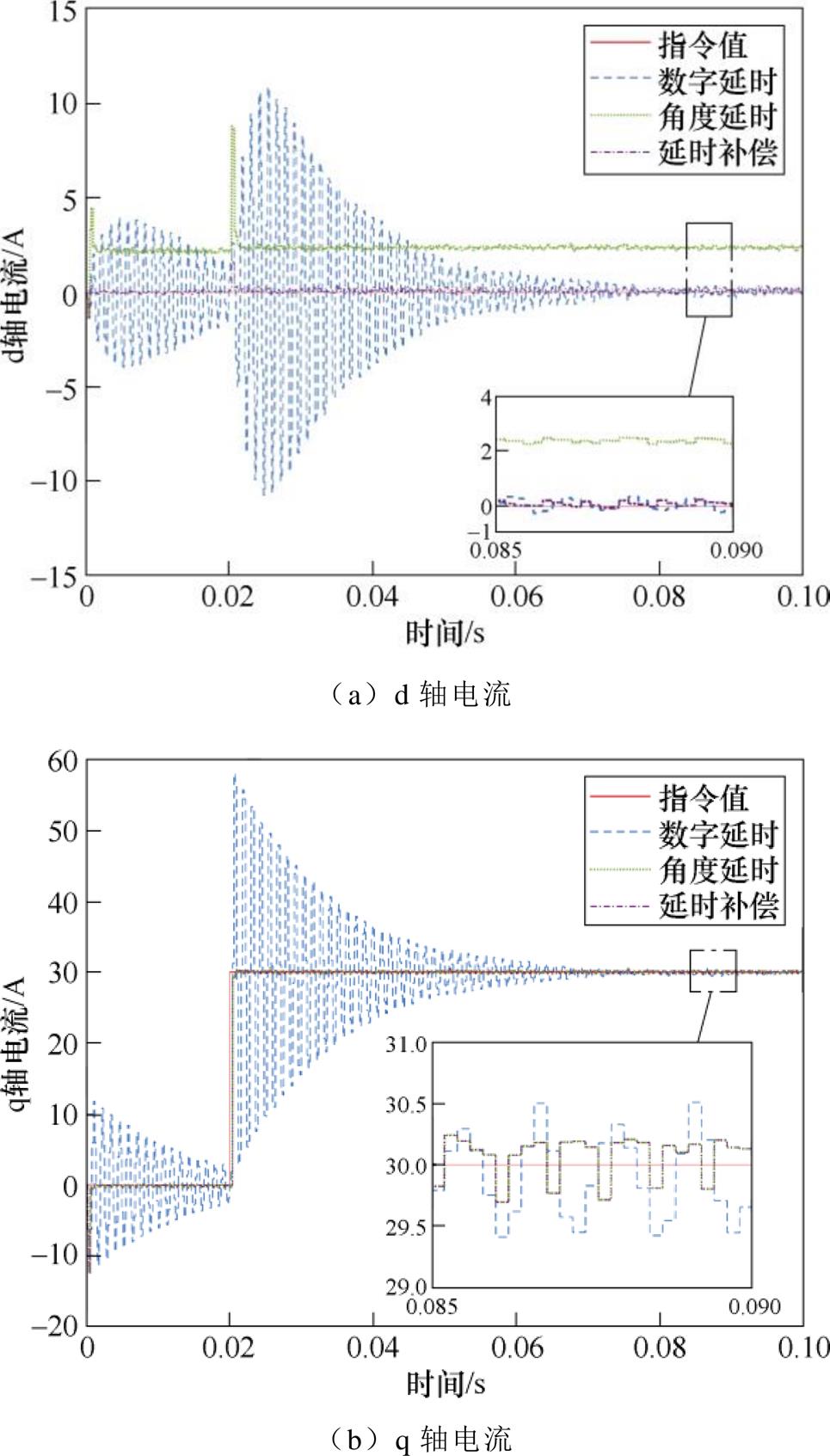
图17 数字延时、角度延时-电流控制仿真
Fig.17 Digital delay、angle delay-current control simulation
转速控制仿真设定永磁同步电机工作在转矩模式,在0.02 s处给定转速阶跃指令n*=600 r/min,0.06 s处给定负载阶跃Tl=20 N·m。图18展示各项参数失配对于转速控制的影响以及加入非线性积分后的控制效果,结合式(29)分析结果,转速控制稳态精度受磁链参数影响较明显,本文后续实验中选择非线性积分系数Ks=0.01。图19为转速控制中的死区效应以及死区补偿效果,在未加死区补偿工况下,EMPC转速控制无法完成无静差跟踪。
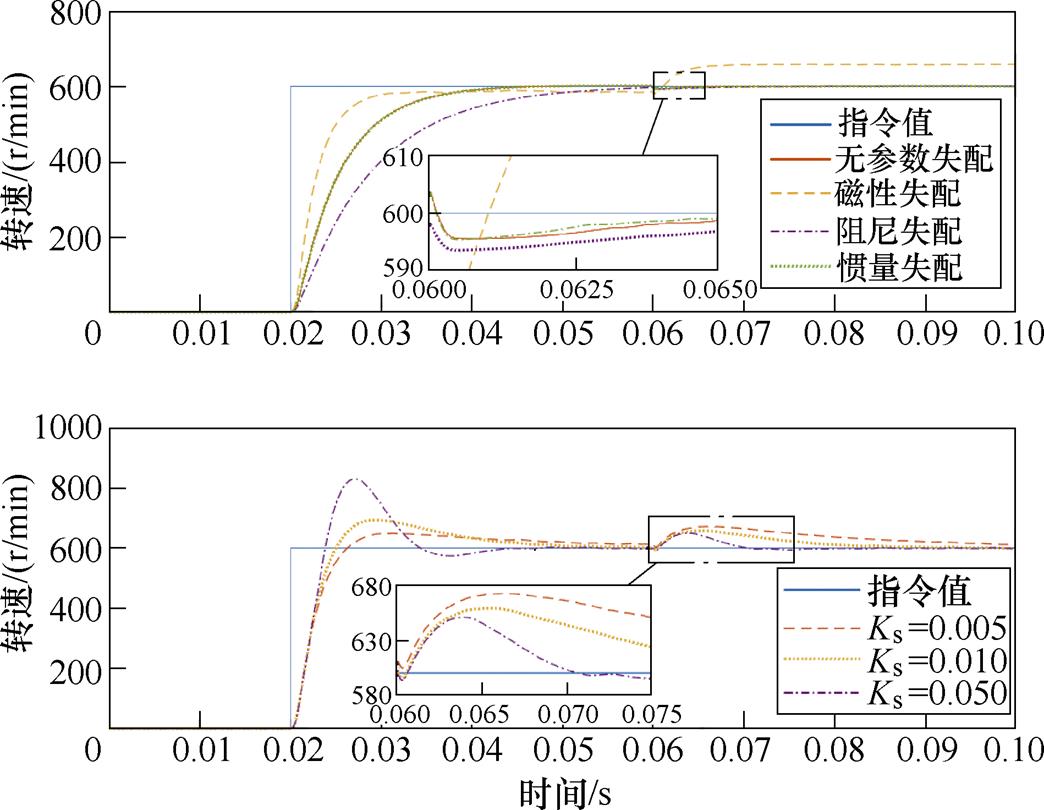
图18 参数失配-转速控制仿真
Fig.18 Parameter mismatch-speed control simulation
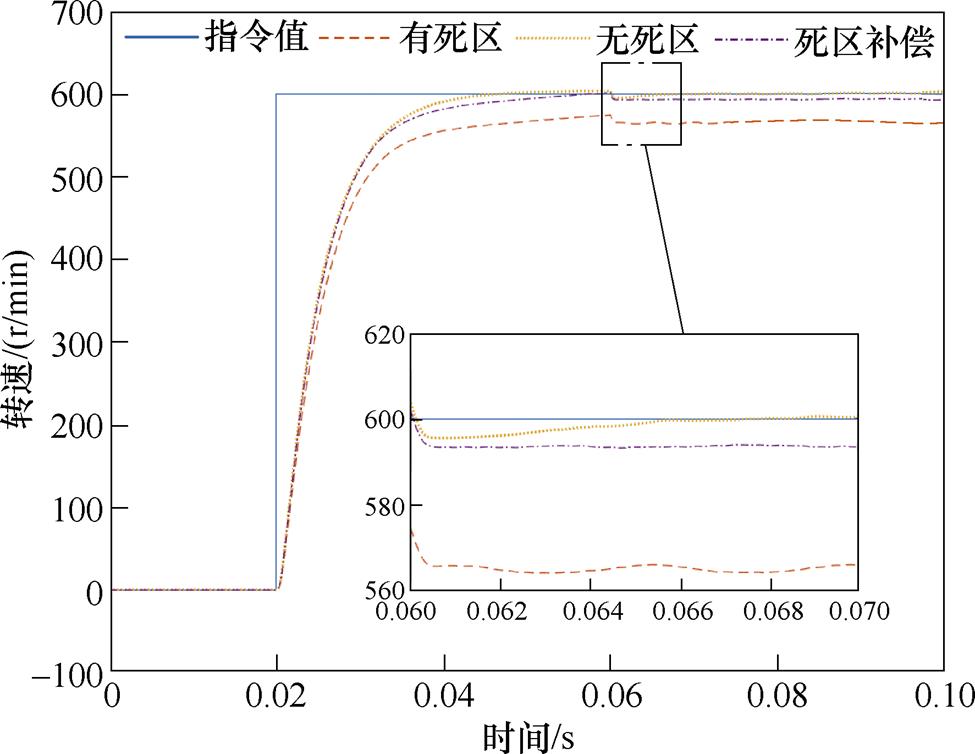
图19 死区效应-转速控制仿真
Fig.19 Deadzone effect-speed control simulation
搭建了基于TI公司TMS320F2838d作为主控芯片的实验平台,该芯片有两个C28x架构的32位CPU,每个CPU各有44 KB的本机RAM及共享128 KB的全局RAM。EMPC最优控制律转化为C代码后,控制律系数以数组形式保存,芯片内存占用如图20所示,单位为字(2 bytes),共生成以MPT为前缀的8个数组。图20中,以_S为后缀的是转速控制分区数组,无后缀的是电流控制分区数组。其中MPT_A\B\NC数组用于判定当前状态量是否处于全局状态约束范围内,MPT_HTB\FTB\GTB数组用于判定当前状态量所处的临界分区编号,MPT_F\G数组为该分区内的最优控制律系数。芯片内存占用空间如式(48)所示,转速控制分区数组占用空间1 418×2 bytes,约2.8 KB,电流控制分区数组占用空间13 226×2 bytes,约26.4 KB。逆变器开关频率fs=5 kHz,控制周期总时长为200 ms,在转速环与电流环查询程序前后分别对GPIO引脚进行置位,通过示波器采集引脚电平得到的程序运行时间如图21所示,转速环程序查询时间为12.364 8 ms,电流环程序查询时间为54.110 4 ms。
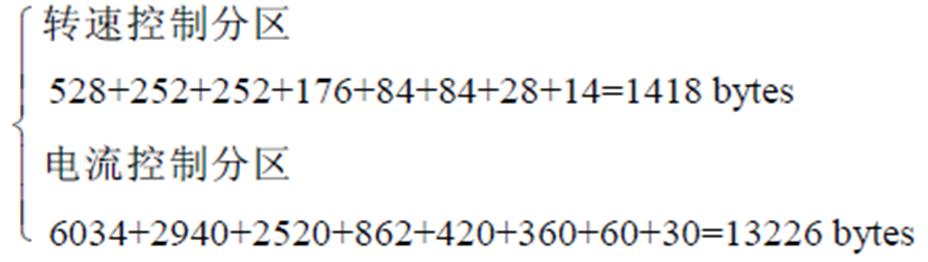 (48)
(48)
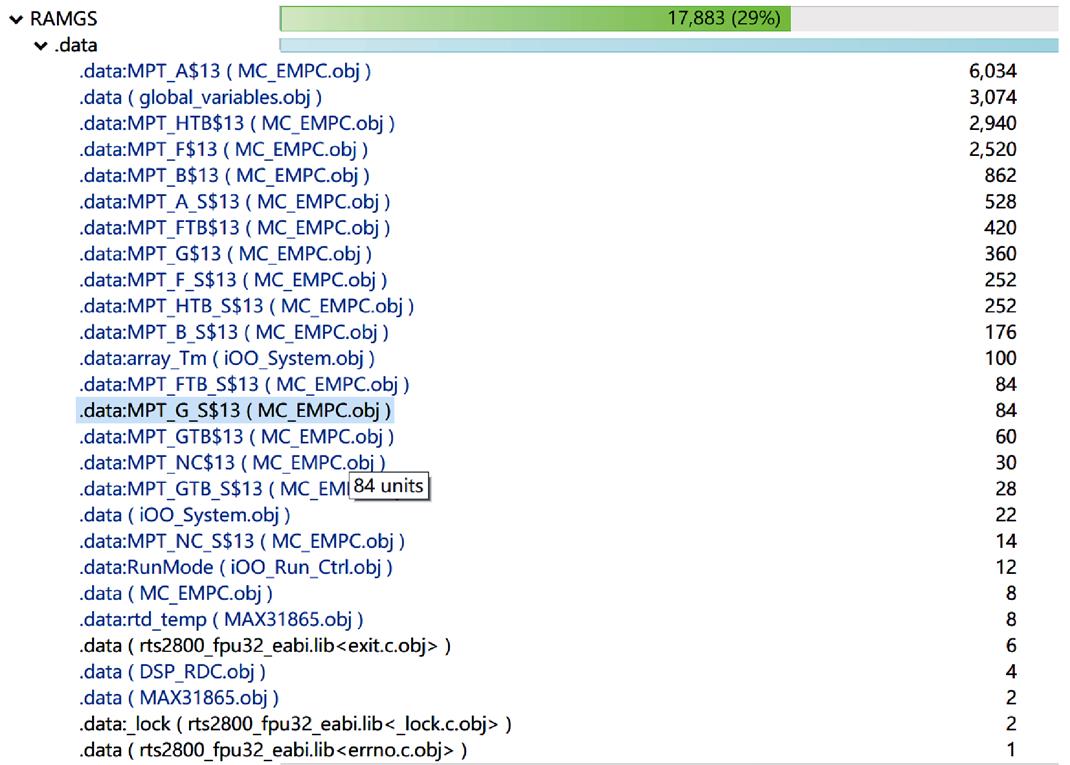
图20 PWA内存占用
Fig.20 PWA memory
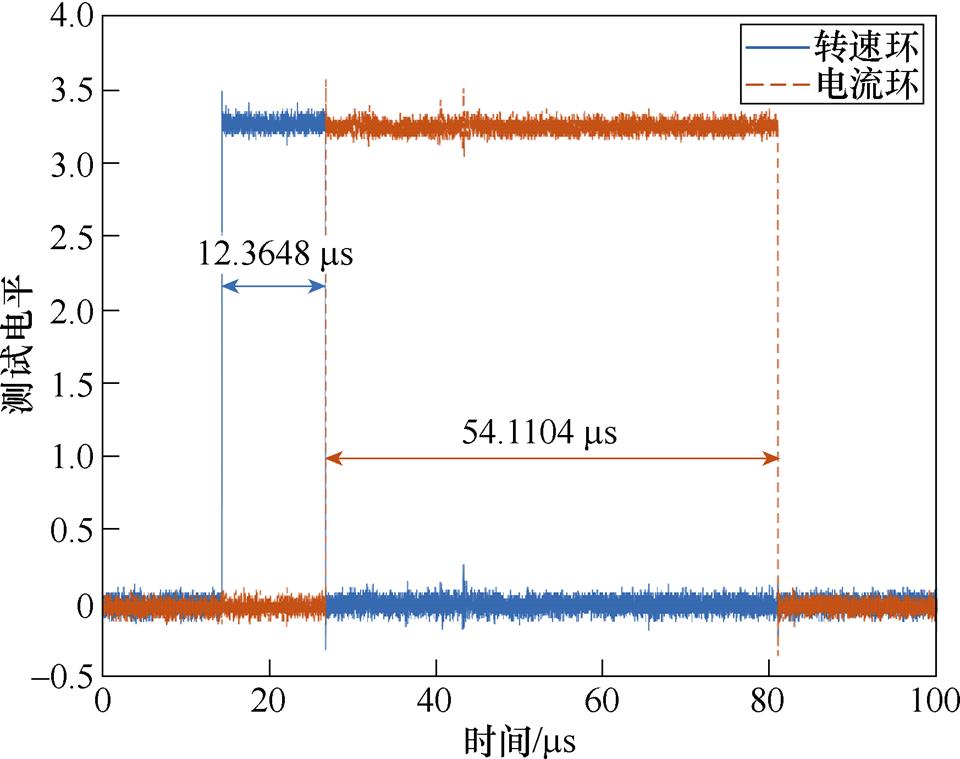
图21 控制程序运行时间(示波器采集)
Fig.21 Control program running time (oscilloscope acquisition)
控制器同时驱动两台永磁同步电机同轴共母线运行,共享控制信息,L电机工作在电流环、R电机工作在转速环,A电机工作在电流环、B电机工作在转速环,电机台架及控制器如图22所示。

图22 对拖实验平台
Fig.22 Back-to-back testing platform
电流实验工况与仿真保持一致,由B电机稳速在600 r/min,A电机给定电流指令,。为展现参数失配及非线性补偿的影响,实验所用参数皆按照3.1节仿真工况设置为表1参数的2倍,DSP发波环节设置死区时间3 ms,且不做电流预测。图23展示EMPC在参数失配、死区效应、数字延时影响下的电流控制效果,参数失配与死区效应皆导致系统产生偏置误差,数字延时导致系统在响应阶段出现振荡,与2.3~2.6节分析及仿真结论保持一致。
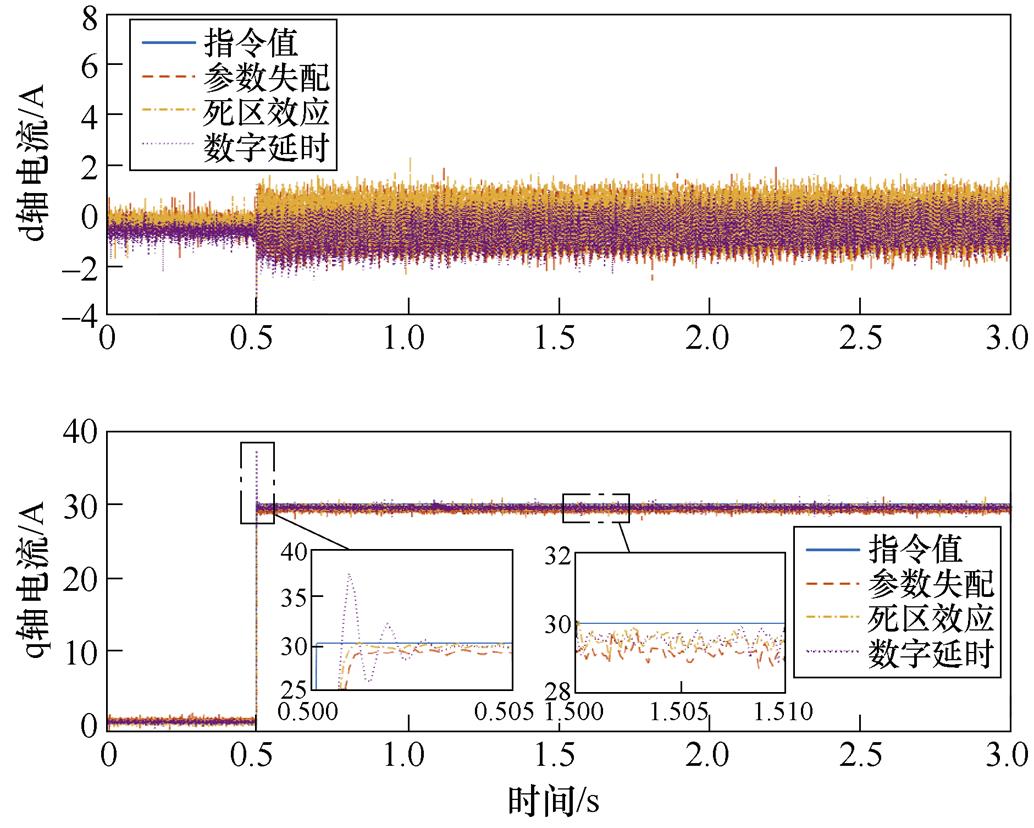
图23 参数失配、死区效应、数字延时-电流控制实验
Fig.23 Parameter mismatch、dead zone effect、digital delay-current control experiment
保留失配参数及死区时间,对各类非理想因素进行补偿后,图24a、图24b展示在相同工况下EMPC与PI两种控制策略的效果对比,图24c展示两种算法的电压指令对比及不同状态下EMPC激活的临界分区。PI控制中由于环路之间的耦合影响,q轴电流加载给d轴电流带来明显的扰动影响,经过0.1 s后回到稳态,q轴电流于0.5 s处加载后,经过0.1 s到达指令值,且伴随着一定的超调;EMPC算法于0.5 s处给定电流指令,指令下发之前,电机处于临界分区CR7,在指令响应初期电机状态发生变化,切换到临界分区CR22,该分区内控制电压运行在约束边界,保证最大化的电压利用率,d、q轴电流皆经过7个控制周期到达指令值,用时0.001 4 s,相较PI算法表现出明显的快速性,有效降低耦合效应的同时无超调现象,进入稳态后最优控制电压处于约束内部,切换到临界分区CR17。需要注意的是,EMPC最优控制律是控制电压与临界分区内状态量的仿射关系,并不指代控制电压量本身,CR7与CR17各自指代一组控制律,该分区内对应的最优控制量皆处于约束内部,CR22分区对应的最优控制量都处于约束边界。图25展示两种算法d、q轴电流FFT分析结果,相较于PI控制,EMPC算法表现出了更好的谐波电流抑制能力。
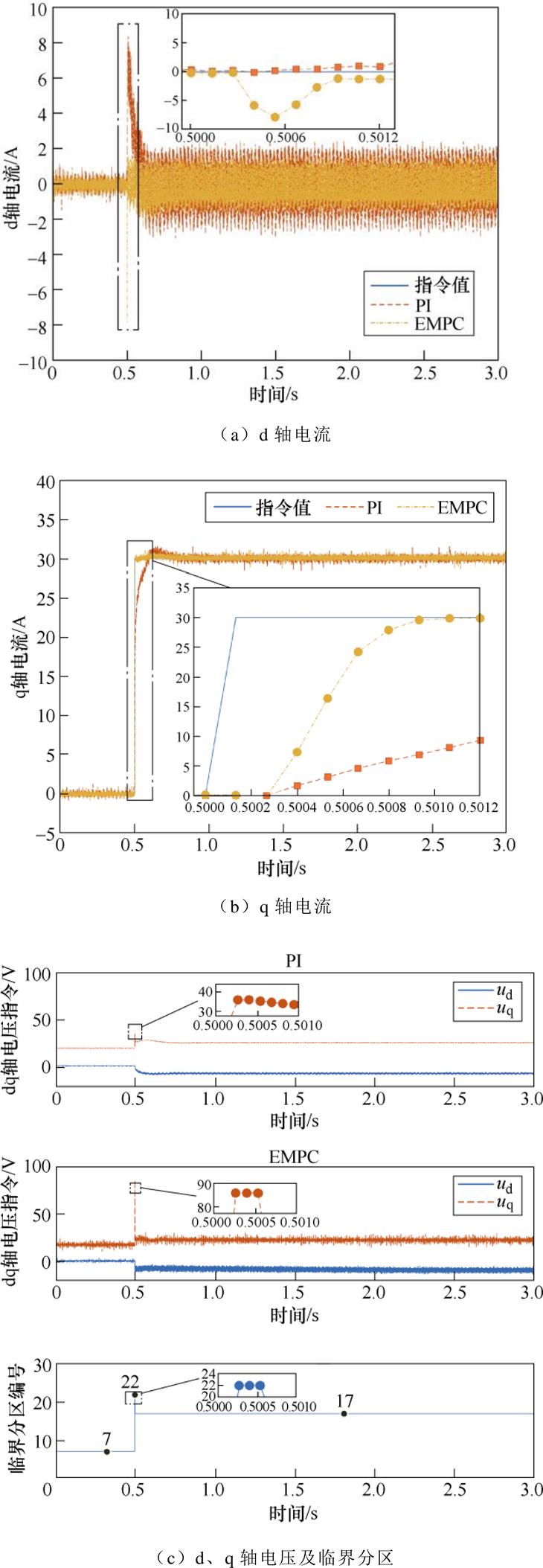
图24 EMPC、PI电流控制实验
Fig.24 EMPC、PI current control experiment
转速实验工况与仿真保持一致,给定R电机转速阶跃指令n*=600 r/min,图26展示在参数失配及死区效应影响下的转速控制效果,二者都产生了偏置误差,与2.3、2.5、3.2节仿真及理论分析吻合。
对非理想因素进行补偿后,图27a展示EMPC与PI两种控制策略的效果对比,于0.5 s处给定转速指令,PI算法经过1 s到达稳态,伴随着较为明显的超调现象;EMPC算法经过0.3 s到达指令值且无超调现象。转速环的最优控制量为电流环q轴电流指令,图27b展示动态过程中两种算法的q轴电流指令对比及EMPC临界分区切换情况,转速环模型不存在如电流环模型d、q轴的状态耦合。PI控制在指令跟踪初期也可以响应最大约束电流,但是由于机械环节响应速度较慢,基于误差调节的方式无法快速找到最优解,仍然有超调现象存在。EMPC算法在动态响应过程中最优控制量到达约束边界,临界分区由CR9切换到CR15,进入稳态后控制量回到约束内部,切换到CR12。图27c展示电流内环控制电压指令。4.1节对EMPC电流控制分析完毕,此处不再展开。
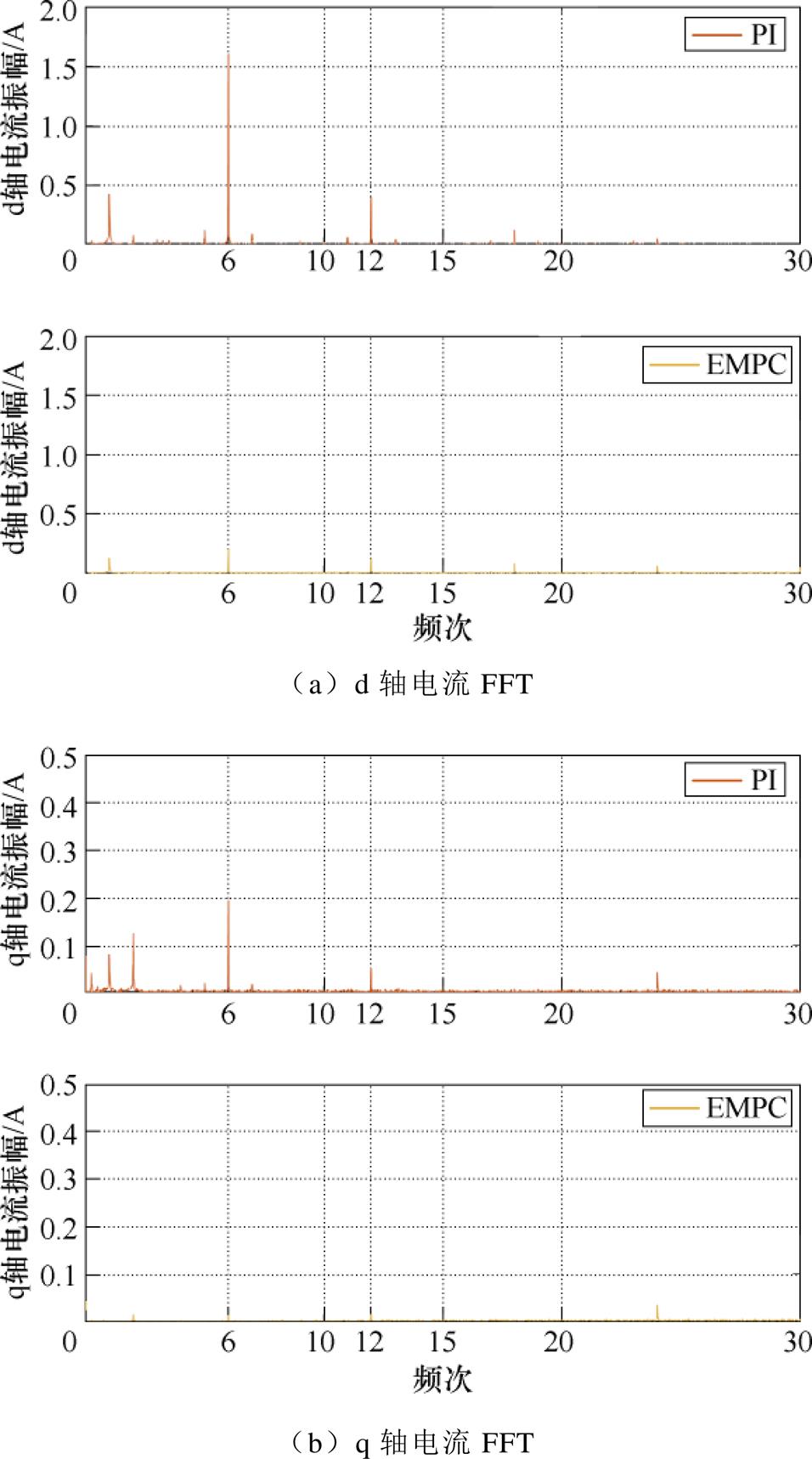
图25 EMPC、PI FFT-电流控制实验
Fig.25 EMPC、PI FFT-current control experiment
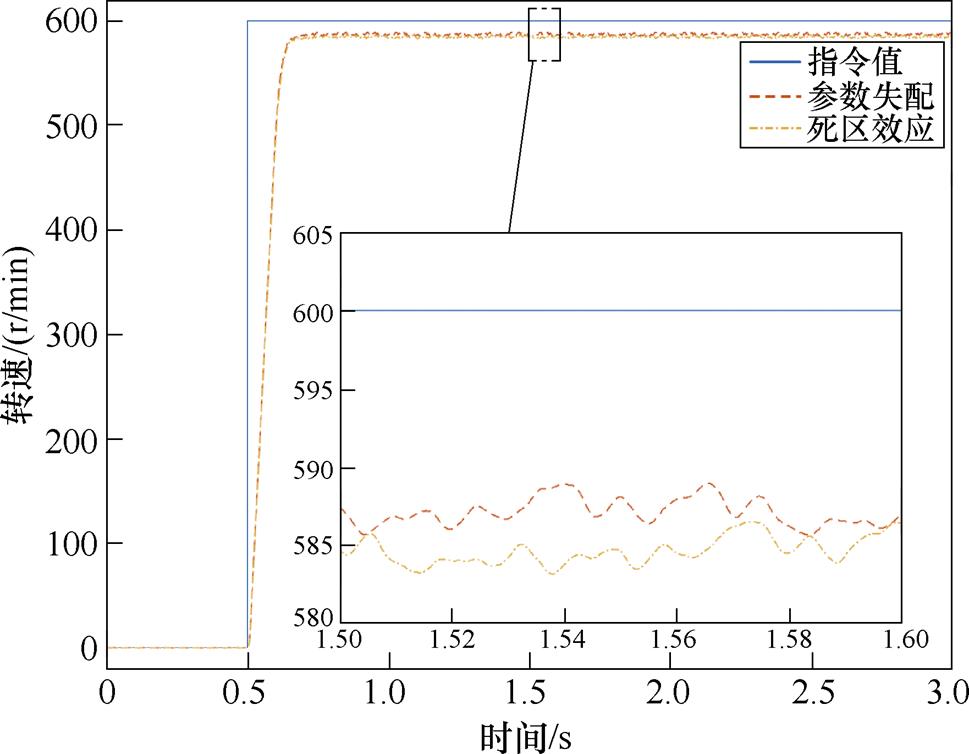
图26 参数失配、死区效应-转速控制实验
Fig.26 Parameter mismatch、dead zone effect-speed control experiment
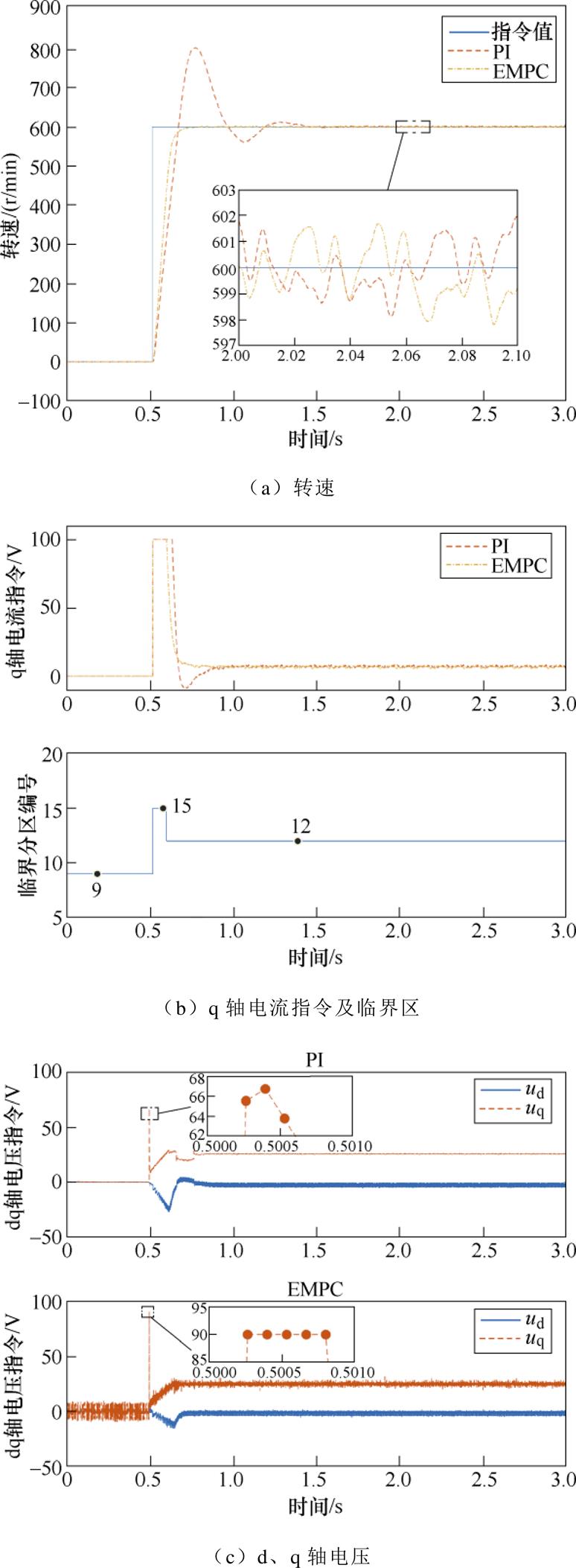
图27 EMPC、PI-转速控制实验
Fig.27 EMPC、PI-speed control experiment
保持相同的控制参数,R电机进入稳态后,由L电机给定30 A电流负载,图28a为PI与EMPC两种算法在突加负载时的转速数据对比。PI控制最大超调量65 r/min,经过0.5 s回到稳态;EMPC算法最大超调量6 r/min,经过0.1 s回到稳态,电流动态响应更为平滑。图28b展示两种算法q轴电流指令对比及EMPC临界分区,EMPC电流指令平滑无振荡,保证了在扰动下对于转速指令的快速响应,该工况下临界分区保持在CR12,最优控制律未发生变化,图28c展示电流内环控制电压指令。
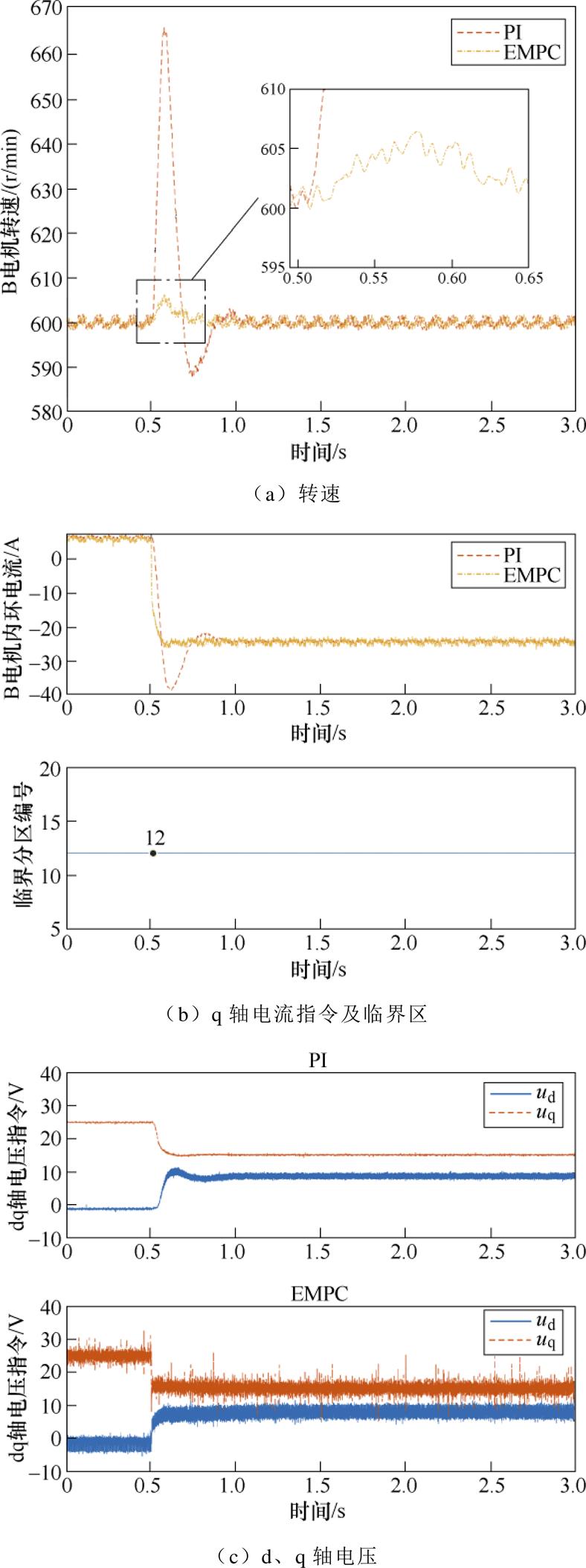
图28 EMPC、PI-转速控制实验
Fig.28 EMPC、PI-speed control experiment
本文针对高性能永磁同步电机控制提出一种级联式EMPC算法,以电流及转速跟踪目标为代价函数,通过离线求解有约束问题的最优解,以分段仿射函数的显式表达存储于多面体临界分区中,解决了传统MPC在线求解算力消耗大的问题。基于多参数规划思想完成系统线性化建模,消除了电机系统环路之间的耦合项及非线性转速项带来的扰动。在模型中加入非线性积分环节,普适性地解决了各类模型失配带来的影响。通过仿真及实验验证了算法的有效性及优越性,得到以下结论:
1)相较于抗饱和策略只能应用于一些特定工作点,并可能导致系统的不稳定,EMPC算法将模型及各类约束条件纳入控制问题的求解,包含了控制过程中所有的动态特征,保证系统线性稳定的同时得到了更好的动态性能。
2)相较于PI控制,EMPC算法的高带宽特性使其具有更快的动态响应速度及谐波抑制能力;基于多变量控制思想的设计方法使其不再需要考虑系统状态之间的耦合作用;基于可行域求解的最优控制量可以满足全域的控制需求,不再需要根据工况进行繁琐的调参工作。
附录 MPT3工具箱函数介绍
MPT3工具箱网址:http://www.tbxmanager.com/
1. Model=LTISystem (‘A’, A, ‘B’, B, ‘C’, C, ‘D’, D, ‘T_s ’, Ts):系统定义函数,定义线性时不变系统,ABCD矩阵定义如2.1节及表1所示。
2. Ctrl=MPCController (model, horizon):控制器函数,基于线性时不变系统定义,horizon为预测时域。
3. Px/Pu=Polyhedron (‘A’, A, ‘b’, b):多面体函数,定义约束多面体,{x|Ax≤b}。
4. x/u.setConstraint ( ):对状态量及控制量分别设置控制器约束。
5. y.reference ( ):设置输出参考指令。
6. y.penalty ( ):设置输出惩罚系数。
7. Ectrl=model.toExplicit:将控制器转化为显式MPC。
8. Ectrl.exportToC:将最优控制律转化为C代码。
参考文献
[1] Cui Kai, Wang Chenchen, Gou Lifeng, et al. Analysis and design of current regulators for PMSM drives based on DRGA[J]. IEEE Transactions on Trans- portation Electrification, 2020, 6(2): 659-667.
[2] Belda K, Vošmik D. Explicit generalized predictive control of speed and position of PMSM drives[J]. IEEE Transactions on Industrial Electronics, 2016, 63(6): 3889-3896.
[3] Mariethoz S, Domahidi A, Morari M. High-bandwidth explicit model predictive control of electrical drives[J]. IEEE Transactions on Industry Applications, 2012, 48(6): 1980-1992.
[4] De Doná J A, Goodwin G C, Seron M M. Anti-windup and model predictive control: reflections and con- nections[J]. European Journal of Control, 2000, 6(5): 467-477.
[5] Richalet J, Rault A, Testud J L, et al. Model algorithmic control of industrial processes[J]. IFAC Proceedings Volumes, 1977, 10(16): 103-120.
[6] Richalet J, Rault A, Testud J L, et al. Model predi- ctive heuristic control[J]. Automatica, 1978, 14(5): 413-428.
[7] Clarke D W, Mohtadi C, Tuffs P S. Generalized predictive control-part I. the basic algorithm[J]. Automatica, 1987, 23(2): 137-148.
[8] Clarke D W, Mohtadi C, Tuffs P S. Generalized predictive control-part II extensions and inter- pretations[J]. Automatica, 1987, 23(2): 149-160.
[9] Rodriguez J, Cortes P. Predictive control of power converters and electrical drives[M]. Chichester, West Sussex, UK: John Wiley & Sons, 2012.
[10] Karamanakos P, Liegmann E, Geyer T, et al. Model predictive control of power electronic systems: methods, results, and challenges[J]. IEEE Open Journal of Industry Applications, 2020, 1: 95-114.
[11] Zhang Yongchang, Xie Wei, Li Zhengxi, et al. Low-complexity model predictive power control: double-vector-based approach[J]. IEEE Transactions on Industrial Electronics, 2014, 61(11): 5871-5880.
[12] Zhang Yongchang, Xie Wei. Low complexity model predictive control-single vector-based approach[J]. IEEE Transactions on Power Electronics, 2014, 29(10): 5532-5541.
[13] 陈荣, 翟凯淼, 舒胡平. 永磁同步电机双矢量固定开关频率模型预测控制研究[J]. 电工技术学报, 2023, 38(14): 3812-3823.
Chen Rong, Zhai Kaimiao, Shu Huping. Predictive control of dual vector fixed switching frequency model for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2023, 38(14): 3812-3823.
[14] 李祥林, 薛志伟, 阎学雨, 等. 基于电压矢量快速筛选的永磁同步电机三矢量模型预测转矩控制[J]. 电工技术学报, 2022, 37(7): 1666-1678.
Li Xianglin, Xue Zhiwei, Yan Xueyu, et al. Voltage vector rapid screening-based three-vector model predictive torque control for permanent magnet syn- chronous motor[J]. Transactions of China Elec- trotechnical Society, 2022, 37(7): 1666-1678.
[15] 张珍睿, 刘彦呈, 陈九霖, 等. 永磁同步电机幅值控制集模型预测控制策略[J]. 电工技术学报, 2022, 37(23): 6126-6134.
Zhang Zhenrui, Liu Yancheng, Chen Jiulin, et al. Amplitude control set model predictive control strategy for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2022, 37(23): 6126-6134.
[16] 郑长明, 阳佳峰, 高昂, 等. 永磁同步电机长线变频驱动系统定频滑模预测电流控制[J]. 电工技术学报, 2023, 38(4): 915-924.
Zheng Changming, Yang Jiafeng, Gao Ang, et al. Fixed switching frequency sliding-mode predictive current control of a PMSM variable-frequency drive system with long cables[J]. Transactions of China Electrotechnical Society, 2023, 38(4): 915-924.
[17] 周奇勋, 刘帆, 吴紫辉, 等. 永磁同步电机转矩与定子磁链模型预测控制预测误差补偿方法[J]. 电工技术学报, 2022, 37(22): 5728-5739.
Zhou Qixun, Liu Fan, Wu Zihui, et al. Model predictive torque and stator flux control method for PMSMs with prediction error compensation[J]. Transactions of China Electrotechnical Society, 2022, 37(22): 5728-5739.
[18] Geyer T, Quevedo D E. Performance of multistep finite control set model predictive control for power electronics[J]. IEEE Transactions on Power Elec- tronics, 2015, 30(3): 1633-1644.
[19] Scoltock J, Geyer T, Madawala U K. A comparison of model predictive control schemes for MV induction motor drives[J]. IEEE Transactions on Industrial Informatics, 2013, 9(2): 909-919.
[20] Borrelli F, Bemporad A, Morari M. Predictive control for linear and hybrid systems[M]. New York: Cambridge University Press, 2017.
[21] Bemporad A, Morari M, Dua V, et al. The explicit linear quadratic regulator for constrained systems[J]. Automatica, 2002, 38(1): 3-20.
[22] Boyd S, Vandenberghe L. Convex optimization[M]. Cambridge, UK: Cambridge University Press, 2004.
[23] Springob L, Holtz J. High-bandwidth current control for torque-ripple compensation in PM synchronous machines[J]. IEEE Transactions on Industrial Elec- tronics, 1998, 45(5): 713-721.
[24] Abdel-Rady I M Y, El-Saadany E F. An improved deadbeat current control scheme with a novel adaptive self-tuning load model for a three-phase PWM voltage-source inverter[J]. IEEE Transactions on Industrial Electronics, 2007, 54(2): 747-759.
[25] 国敬, 范涛, 章回炫, 等. 高速低载波比下永磁同步电机电流环稳定性分析[J]. 中国电机工程学报, 2019, 39(24): 7336-7346, 7506.
Guo Jing, Fan Tao, Zhang Huixuan, et al. Stability analysis of permanent magnet synchronous motor current loop control at high speed and low carrier ratio[J]. Proceedings of the CSEE, 2019, 39(24): 7336-7346, 7506.
[26] Chen Jiahao, Mei Jie, Yuan Xin, et al. Online adapta- tion of two-parameter inverter model in sensorless motor drives[J]. IEEE Transactions on Industrial Electronics, 2022, 69(10): 9860-9871.
[27] Choi J W, Sul S K. Inverter output voltage synthesis using novel dead time compensation[J]. IEEE Transa- ctions on Power Electronics, 1996, 11(2): 221-227.
[28] Park Y, Sul S K. A novel method utilizing trapezoidal voltage to compensate for inverter nonlinearity[J]. IEEE Transactions on Power Electronics, 2012, 27(12): 4837-4846.
[29] Hwang S H, Kim J M. Dead time compensation method for voltage-fed PWM inverter[J]. IEEE Transa- ctions on Energy Conversion, 2010, 25(1): 1-10.
[30] Young H A, Perez M A, Rodriguez J. Analysis of finite-control-set model predictive current control with model parameter mismatch in a three-phase inverter[J]. IEEE Transactions on Industrial Elec- tronics, 2016, 63(5): 3100-3107.
[31] Wipasuramonton P, Zhu Z Q, Howe D. Predictive current control with current-error correction for PM brushless AC drives[J]. IEEE Transactions on Industry Applications, 2006, 42(4): 1071-1079.
[32] Muske K R, Badgwell T A. Disturbance modeling for offset-free linear model predictive control[J]. Journal of Process Control, 2002, 12(5): 617-632.
[33] Faanes A, Skogestad S. Offset-free tracking of model predictive control with model mismatch: experi- mental results[J]. Industrial & Engineering Chemistry Research, 2005, 44(11): 3966-3972.
[34] Herceg M, Kvasnica M, Jones C N, et al. Multi- parametric toolbox 3.0[C]//2013 European Control Conference (ECC), Zurich, Switzerland, 2013: 502-510.
Abstract Since the 1970s, model predictive control (MPC) algorithms have proven to be effective control strategies for multi-input and multi-output nonlinear dynamic systems with complex constraints. However, due to the significant computational demands associated with optimization problems, applying MPC to control objects with fast response time requirements, such as motor systems, presents challenges in achieving iterative solutions for constrained problems within short control cycles. This paper proposes a high-performance control strategy for permanent magnet synchronous motors based on the explicit model predictive control (EMPC) concept. The strategy involves the establishment of linearized models for current and speed control using multiparametric programming to eliminate coupling effects and nonlinear influences between states. The offline solution yields optimal control actions under effective constraint conditions, stored as piecewise-affine functions. During operation, the corresponding optimal control actions are obtained by querying the partition containing the current state combination. The paper comprehensively analyzes model mismatch, digital delay, and dead-zone effects in EMPC applications and provides corresponding solutions. A fully automated dyno test platform verifies the proposed algorithm's efficacy.
The paper introduces the theoretical foundations of multiparametric programming and presents a comprehensive design process for explicit model predictive control. It establishes linearized models for controlling current and speed in permanent magnet synchronous motors while linearizing voltage and current constraints. The effects of parameter mismatch, digital delay, and inverter nonlinearity on EMPC are analyzed, and respective compensatory measures are proposed. The EMPC problem definition and optimal control law are solved using the MPT3 toolbox, displaying critical partitions and optimal cost functions under different state combinations. The simulation verifies the algorithm and the preceding analysis of various non-ideal factors. Experimental validation is conducted on a motor dyno test platform, comparing the performance of EMPC with a proportional-integral (PI) control algorithm. In the current control scenario, when given a 30 A current step command, the PI algorithm exhibits a response time of 0.1 s, while the EMPC algorithm responds in 0.001 4 s. In speed control, with a 600 r/min speed step command, the PI algorithm takes 1 s to respond, whereas the EMPC algorithm responds in 0.3 s. When subjected to load disturbances, the PI algorithm reaches a steady state after 0.5 s, while the EMPC algorithm reaches a steady state after 0.1 s. The experimental results demonstrate that EMPC effectively reduces coupling effects without overshooting because each control is optimized under constraints, exhibiting superior harmonic current suppression capabilities.
Based on the theoretical analysis and experimental results, the following conclusions can be drawn:
(1) The EMPC algorithm incorporates models and various constraints into the control problem, which can encompass all dynamic characteristics during the control process, guarantee linear stability, and achieve better dynamic performance compared to anti-saturation strategies.
(2) Due to the high bandwidth characteristic, the EMPC algorithm has faster dynamic response and harmonic suppression than PI control. The design approach based on multivariable control does not consider coupling effects between system states, and the optimal control action obtained through feasible region-solving meets global control requirements. Thus, it eliminates the need for cumbersome tuning based on operating conditions.
Keywords:Permanent magnet synchronous motor (PMSM), explicit model predictive control, optimal control, speed prediction control, current prediction control
刘忠永 男,1995年生,博士研究生,研究方向为永磁同步电机控制、模型预测控制等。E-mail: lzy@mail.iee.ac.cn
范 涛 男,1981年生,研究员,博士生导师,研究方向为永磁电机分析与优化设计、先进电机控制、高性能电力电子装备电子系统设计开发等。E-mail: fantao@mail.iee.ac.cn(通信作者)
中图分类号:TM341
DOI: 10.19595/j.cnki.1000-6753.tces.230547
国家重点研发计划资助项目(2021YFB2500600)。
收稿日期 2023-04-27
改稿日期 2023-06-07
(编辑 崔文静)