
图1 电动汽车驱动充电系统结构
Fig.1 Electric vehicle drive and charging system structure diagram
摘要 传统电动汽车驱动和充电系统相互独立工作,存在充电容量小、质量体积大、成本高等问题。而驱动充电一体化系统通过将电机绕组和逆变器进行合理重构,复用于充电系统,可以实现系统轻量化和高度集成化,进一步提高系统功率密度。该文首先对当前国内外提出的驱动充电一体化拓扑结构进行归纳总结分类,论述各类型一体化拓扑结构的工作原理、优点以及存在的主要问题;然后,针对目前驱动充电一体化系统存在的关键技术问题对电动汽车不同运行模式下的控制策略进行综述;最后,对电动汽车驱动充电一体化系统的发展趋势进行展望。
关键词:驱动充电系统 一体化拓扑 电动汽车 控制策略
近年来,能源短缺与环境污染问题日益严峻,新能源汽车作为一种清洁能源交通工具得到快速发展,并获得广泛关注[1-2]。纯电动汽车以蓄电池和驱动电机构成系统动力来源,技术成熟且成本低,拥有巨大的发展优势。然而,作为电动汽车运行过程中提供能量补给的重要环节,充电系统是其重要的基础支撑系统[3-4]。能否方便、高效地为车载电源充电,成为制约电动汽车产业化发展的关键因素之一。
目前,电动汽车充电系统主要有两类:一类是非车载充电系统;另一类是车载充电系统。非车载充电系统通常集成在充电桩及大型充电机内,安装在停车场、车库等固定场所,其充电功率一般在50 kW以上,以直流电输出方式为主,充电速度快,但存在基础设施投资大和需要特别维护等问题,并且由于需要较大充电功率,还需要重视对电网的保护[5]。车载充电系统通常直接安装在电动汽车上,当电动汽车接入三相或者单相交流电后,借助车载充电系统将交流电转换为直流电,充电功率等级较低,但其充电所需时间较长,一般适用于汽车闲置状态下充电[6]。并且由于车载充电系统内部存在大量电力电子器件,容易造成电网输入电流波形畸变、功率因数降低等问题,需要加入功率因数校正(Power Factor Correction, PFC)模块。
随着电动汽车电池技术的发展,电动汽车的续航里程不断增加,对公共充电桩的依赖已显著降低,而对更加便利的私人充电桩需求日益增加[7-8]。采用直流快充方式需要建造大量充电桩,占用大量土地面积且造价昂贵。同时,大规模直流充电站对充电技术和充电安全性要求相对较高,大多在白天运行,进一步加重了电网的运行负担。而交流慢充式的私人充电桩一般在夜间充电,一定程度上缓解了电网压力。此外,采用车载充电系统可以针对车载电源特性进行专门设计,充电功率和充电电流小,减小对车载电源的损耗,可以很好地完善能源管理系统。因此,交流慢充式的车载充电系统是缓解电动汽车充电问题的有效解决方案[9]。
虽然车载充电系统能够使电动汽车不再依赖充电桩,充电更加方便,但是目前大多数电动汽车中驱动和充电系统是相互独立分别运行的,会造成电动汽车体积与质量的增加,使得车载充电系统容量受到限制[10]。为了解决这一问题,有关研究将驱动系统和充电系统集成,提出“驱动充电一体化”拓扑结构,通过将驱动系统中部分器件复用于充电系统来实现功率变换器功能高度集成化,以提高车载设备的利用率并有效降低成本。
目前,国内外研究人员已提出了不同类型的驱动充电一体化拓扑结构,在实现车载充电系统性能方面各有差异。本文介绍了驱动充电一体化系统的结构及其发展历程,在已有研究的基础上,梳理了近年来各文献中提出的驱动充电一体化拓扑结构,并对其进行分类和总结,针对当前一体化系统存在的关键技术问题对相关控制策略进行详细分析。最后,对驱动充电一体化系统及其控制策略的发展趋势进行展望。
近年来,电动汽车产业发展迅速,传统电动汽车中电机驱动系统和充放电系统是相互独立的。汽车中变换器、电机和控制器等组件通常仅用于驱动运行,当电池能量不足时,通过另外一套车载充电系统为电池充电。典型的车载充电系统通常由AC- DC变换器、PFC模块和DC-DC变换器构成,如图1a所示。由于车载充电系统中存在大量电力电子器件,容易造成电网输入电流波形畸变、功率因数降低等问题,需要加入PFC模块以减小电路中的谐波损耗。然而,这种相互独立的系统结构不可避免地增加了汽车的体积和质量,驱动系统和充电系统的集成可以解决这一问题。
图1 电动汽车驱动充电系统结构
Fig.1 Electric vehicle drive and charging system structure diagram
将电动汽车驱动系统中变换器部分器件、电机绕组加以重构,结合相关控制器复用于充电系统中,可以实现驱动和充电功能的集成化,如图1b所示。驱动模式下,电动汽车通过功率变换器驱动电机运行,当切换至充电模式时,电机绕组和变换器开关器件复用于充电系统为电池充电。电动汽车驱动充电一体化概念最早在1985年由D. Thimmesch提出,将电动乘用车中的电池充电器集成到逆变器电路组件中,在34 kW功率等级的驱动变换器基础上实现了3.6 kW的车载充电功能[11]。W. E. Ripple于1990年申请了一种将三相逆变器组件和交流电源供电的直流电源充电器组件集成的专利,设计了通过单相交流电网给车载电源充电的拓扑结构和系统方案,节省了设备组件的成本和质量以及所需的空间[12]。至此,电动汽车驱动充电一体化系统成为一个研究热点。
法国法雷奥发动机和电气系统公司对电动汽车多相电机集成驱动充电拓扑结构进行研究,提出能量宏观表示法,可大大降低电流和转矩脉动等电机驱动控制性能[13]。奥地利应用科学大学为降低消费者和汽车制造商成本开展双向集成车载充电器的研究,通过仿真模拟验证了电压定向控制的可行性[14]。韩国现代起亚汽车公司对比分析了不同集成电池充电器案例,验证了使用两个逆变器的交错控制方法为最佳,可大幅降低输入电流纹波[15]。美国马里兰大学研究了用于电动汽车和混合动力汽车的集成车载充电器,经测试在电动和再生制动模式下均可达到复合谐波标准并且能以高功率因数运行,但需要增加额外的AC-DC变换单元[16]。瑞典查尔姆斯理工大学从永磁电机绕组入手对用于混合动力汽车的集成充电器展开研究,建立有限元模型来模拟系统瞬态性能[17];并综述了不同类型的隔离与非隔离集成充电器,提出一种基于裂相永磁电机的隔离型高功率双向集成充电器,但仍需要离合器等少量额外部件并缺少实验验证[18]。加拿大温莎大学致力于研究内置阻尼杆永磁电机在电动汽车集成充放电中的应用,解决了传统内置式永磁电机绕组用作交流充电电感在静止条件下产生不平衡阻抗的问题[19]。国内比亚迪公司将逆变器复用于充电系统中,提出了一种电动汽车集成控制系统,需要额外的LC滤波器参与充电[20]。河北工业大学提出将电机绕组中心抽头引出,可以很好地解决充电模式绕组电流平衡问题,但增加了系统中的开关器件数量[21]。南京航天航空大学针对功率等级较高的电动汽车提出了一种驱动充电集成拓扑,实现了高功率因数、电气隔离、较强容错能力等功能[22]。
驱动充电一体化拓扑结构相对于传统电动汽车驱动充电系统改进的思路有以下两点:①驱动系统元器件复用于充电系统;②复用电机绕组或者改变电机结构重构驱动充电一体化系统。
随着对电动汽车驱动充电一体化系统的深入研究,根据不同的应用场合已提出不同的拓扑结构。其中,根据电机类型可以分为基于永磁电机和基于无永磁体电机的驱动充电一体化系统;根据充电并网类型可以分为基于单相并网和基于三相并网的驱动充电一体化系统;根据是否存在电气隔离可以分为隔离型和非隔离型驱动充电一体化系统;其他特殊驱动充电一体化系统是基于特殊电机或改变电机内部结构设计,包括多相电机、分裂绕组电机和开路绕组电机等[23-27]。
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)、无刷直流电机(Brushless DC motor, BLDC)、感应电机(Induction Motor, IM)和开关磁阻电机(Switched Reluctance Motor, SRM)是大多数电动汽车的首选驱动电机[28-29]。其中,PMSM和BLDC为永磁电机(Permanent Motor, PM),IM和SRM为无永磁体电机。PMSM功率密度、功率因数和效率高,但成本也相对较高;BLDC调速范围广、转矩特性优异、效率高,但其恒功率范围有限,适用于功率等级在300 W以下的单一速度和稳定速度运行的场合;IM的控制技术成熟,调速性能较好,多用于高速大功率电动汽车,但其在小负荷范围内效率较低;SRM相对成本较低,具有转速范围宽、散热能力强等优势,但其存在噪声和转矩脉动等问题。针对这些类型电机,研究人员提出了各种集成驱动充电方案。
文献[30]提出基于PMSM定子绕组开路的驱动充电一体化系统拓扑如图2所示,驱动系统中的逆变器被复用于充电系统中,PMSM定子绕组被重构为充电系统中的网侧滤波电感,集成的驱动充电系统相比于传统车载充电器大大减小了所占电动汽车的体积与质量。在驱动模式下,通过数字信号控制开关S1、S2、S3,使电机绕组呈星形联结;当系统处于充电模式时,通过控制开关使电机定子绕组开路并与电网连接构成电动汽车充电系统,定子绕组用作网侧滤波电感可以滤除网侧电流谐波,在实现储能元件与电网能量双向流动的同时还可以实现车与网互联(Vehicle-to-Grid, V2G)功能。
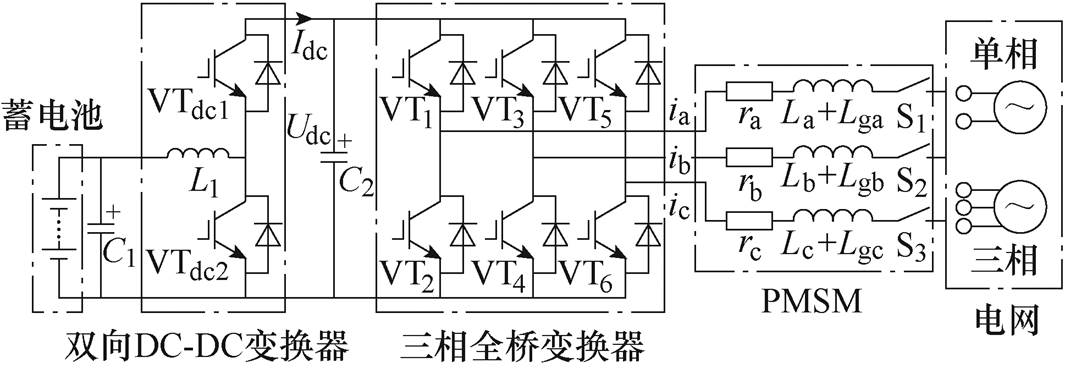
图2 基于PMSM定子绕组开路的驱动充电一体化拓扑
Fig.2 Drive-charging integrated topology based on open PMSM stator winding
与传统相互独立的车载驱动系统和充电系统相比,基于PMSM定子绕组开路的驱动充电一体化系统在集成度方面具有明显的经济型优势,但仍存在以下问题:
(1)充电模式下,交流电网与车载电源之间缺少电气隔离,存在一定的安全隐患,不利于内部电力电子器件的可靠运行。
(2)电机定子绕组开路重构为充电系统,当电机绕组中流过交流电流产生电磁转矩,驱动转子旋转或者振颤时,会造成一定的旋转损耗。
文献[30]对驱动充电一体化系统存在的电机转子振动噪声问题进行研究与改进,分析对比了单相全桥变换模式、三相全桥变换模式和三相四桥臂变换模式下电磁转矩、系统重构复杂程度和滤波特性等方面的优缺点。这些模式下,系统在充电状态中均可解决电磁转矩问题,单相全桥变换模式下电机绕组结构不发生变化,电机重构复杂程度小。然而,改进的驱动充电一体化系统只能接单相电网充电,由于电源受容量限制,充电功率有限,充电时间长。
针对PMSM绕组电感值低,充电过程容易产生转矩,以及IM和SRM两种无永磁体电机存在效率低等问题,文献[31]设计了一种新型的双凸极电磁电机(Doubly Salient Electromagnetic Machine, DSEM)。DSEM是一种非永磁电机,分离的励磁绕组和电枢绕组使其可以被很好地应用于驱动充电一体化系统中,如图3所示。电动模式下,开关Q1、Q2关闭,蓄电池经前级DC-DC变换器和逆变器驱动DSEM工作;充电模式下,开关Q1、Q2打开,DSEM的电枢绕组用作三相脉冲宽度调制(Pulse Width Modulation, PWM)整流器的滤波绕组,三相电网经整流器再反向使用DC-DC变换器为蓄电池充电。
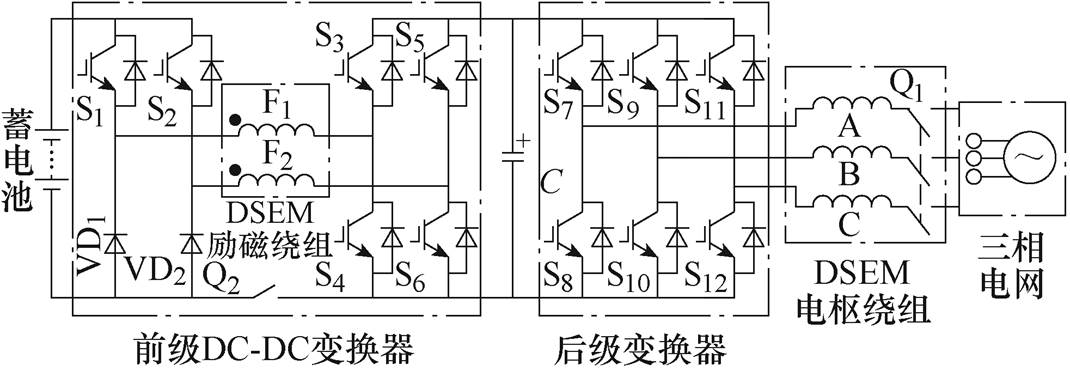
图3 基于DSEM的驱动充电一体化拓扑
Fig.3 Drive-charging integrated topology based on DSEM
当系统工作在充电模式下时,电网输出的三相交流电经过电枢绕组将产生高转矩,因此,DSEM的输出转矩需要保持为零以减少转子振动。文献[31]提出的一体化拓扑在电动模式下两组励磁绕组F1、F2流过的电流方向相同,电机正常驱动工作;在充电模式下,两组励磁绕组F1、F2中流过的电流方向相反,电机整体去磁,此时电枢绕组中通入三相电流也不会产生励磁转矩。在此结构下,系统可以获得更好的充电性能并减小系统电流纹波,但充电系统中缺少电气隔离,并且由于其反电动势呈非正弦性,可能导致磁场畸变,引发较大的转矩脉动。
文献[32]提出了一种基于四相八槽六极(8/6)SRM的驱动充电一体化系统,如图4所示。图中,La14、La23、Lb14、Lb23、Lc14、Lc23、Ld14、Ld23分别为电机A、B、C、D四相绕组电感,NA、NB、NC、ND为四相的中心抽头节点。所研究的拓扑结构采用分体式变换器拓扑结构并与中心抽头SRM绕组相结合,四相功率变换器分为两个双相变换器,电池E1经两相变换器Ⅰ为SRM的A、B相供电,电池E2经两相变换器Ⅱ为SRM的C、D相供电。在驱动模式下,变换器拓扑相当于传统非对称半桥拓扑,具有较好的容错能力并能提高系统可靠性。并且两个变换器均可以工作在再生制动模式下回收制动能量,实现驱动模式下电池荷电状态(State of Charge, SOC)平衡。静止模式下可以通过改变接线方式平衡电池E1和电池E2之间的电压。充电模式下,该系统支持车载动力电池直流和交流充电,具有多电平变换器的特点。然而,电机设计时绕组需要分开,中心抽头节点需要被包含在变换器中,并且充电过程中拓扑结构中每个相位电感会随转子位置变化而变化。
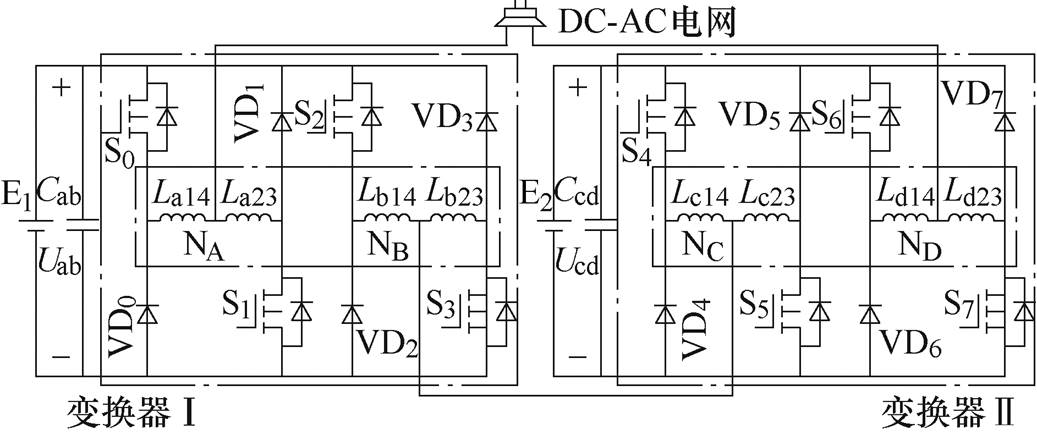
图4 基于SRM的驱动充电一体化拓扑
Fig.4 Drive-charging integrated topology based on SRM
同步磁阻电机(Synchronous Reluctance Motor, SynRM)具有高可靠性、高效率和低成本等优点,结构上没有永磁体,相比于PMSM制造成本相对较低,同时避免了SRM运行时转矩脉动和噪声大的问题。文献[33]针对电动汽车驱动充电一体化系统设计了一种六相同步磁阻电机,电机采用绕组冗余设计,使其在充电时可用作变压器。充电模式下,SynRM的一组绕组连接至逆变器,另一组连接至交流电网,如图5所示。对充电模式下转子旋转和锁定两种情况下系统性能进行测试,结果表明,与三相电网连接时旋转转子充电性能最佳,而与单相电网连接时锁定转子充电性能最佳。但同样需要考虑绕组电感受转子位置影响的问题。另一方面,这种电机类型目前在电动汽车牵引中应用较少,因为它在功率密度、比转矩和功率因数方面的性能较弱[34]。
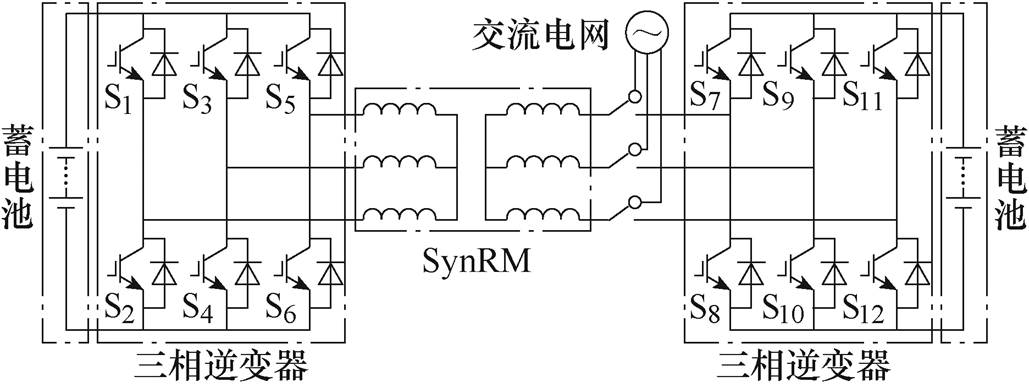
图5 基于SynRM的驱动充电一体化拓扑
Fig.5 Drive-charging integrated topology based on SynRM
电动汽车充电技术的发展使得对便捷的私人充电桩需求日益增加,私人充电桩大多配置在居民小区或者室内停车场内,所用电源主要以单相或者三相交流电为主。单相电源插座的广泛使用促进了具有单相充电能力的电动汽车的发展,并且单相交流充电可以减小充电时脉动功率对车载电池寿命的影响。然而,单相充电只能提供缓慢的充电水平。
文献[35]提出的驱动充电一体化拓扑结构如图6所示。在驱动模式下,车载储能电源通过双向DC-DC变换器,经三相桥式变换器为电机提供驱动功率,如图6a所示。在充电模式下,单相交流电网经二极管桥和电机绕组以及双通道交错升压转换器进行整流,再经双向DC-DC变换器为车载电源充电,如图6b所示。
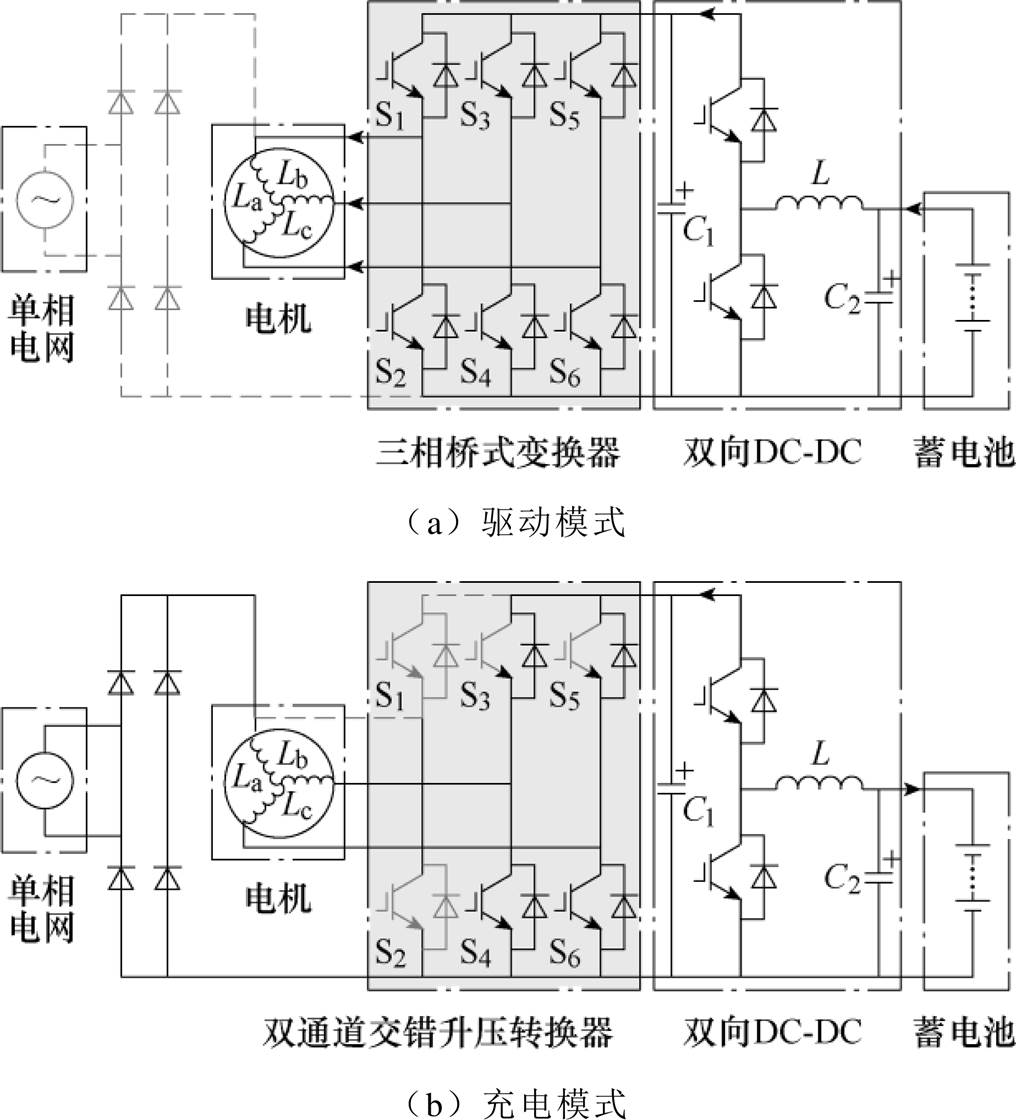
图6 文献[35]提出的单相并网驱动充电一体化拓扑
Fig.6 Drive-charging integrated topology based on single-phase grid connection proposed in Ref.[35]
文献[35]所提出的拓扑结构的优点是不需要额外附加大的电感或者电容,在额定功率下只需要附加一个二极管桥。充电模式下,电机的三相绕组被复用于双通道交错升压转换器中,可以有效消除电流纹波,且只需要连接三相交流电机的相端,不需要连接绕组中性点或者绕组中点。同时,采用单相交流充电可以防止充电期间电机转子旋转。
文献[36]提出一种用于电动汽车的驱动充电一体化系统,如图7所示。该系统中功率转换器由双有源桥(Dual Active Bridge, DAB)DC-DC变换器和三相四桥臂DC-AC变换器构成。为减小直流母线上的电容尺寸,采用有源缓冲器和一个小的薄膜电容器代替传统大电容,来抑制直流母线电压波动,提高系统效率。系统采用单相电网接口,充电过程中电机绕组被重新用作网侧滤波器,可以减少驱动充电一体化系统所占体积,同时,相同的基频电流流过电机三相绕组,可以抵消电机内部产生的转矩。DAB变换器可以将车载储能电源和交流电网隔离,避免电网充放电时对电池或者电网造成冲击。但采用隔离式DC-DC变换器会增加电路所占电动汽车内体积与质量,并且相较于非隔离式DC-DC变换器效率较低。
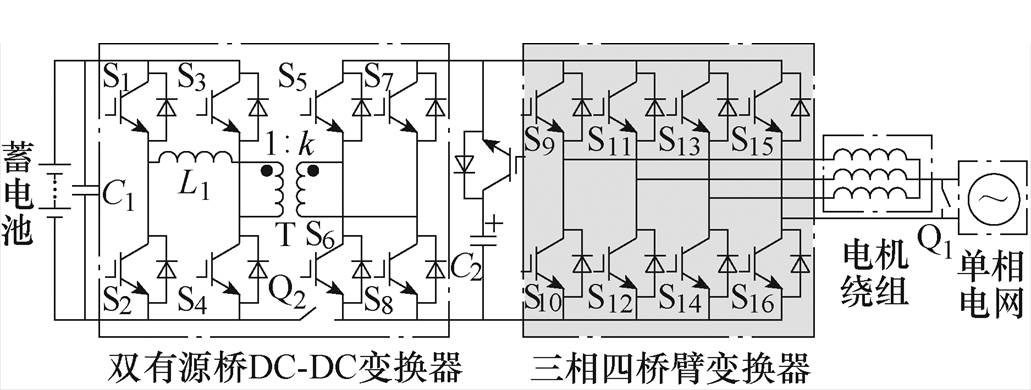
图7 文献[36]提出的单相并网驱动充电一体化拓扑
Fig.7 Drive-charging integrated topology based on single-phase grid connection proposed in Ref.[36]
由于单相充电的功率水平受充电电源容量限制,采用三相电网可以实现快速电池充电。文献[37]提出的驱动充电一体化系统如图8所示,变换器部分由电流源转换器和三相桥式逆变器组成。充电模式下,此系统结构不需要对原驱动系统做任何调整,也不需要设计额外的开关元件改变拓扑结构或者重新配置系统拓扑,即可实现与驱动系统功率相当的高功率三相集成充电。文献[19]设计了一种转子内装阻尼杆的内置式PMSM用于驱动充电一体化系统,解决了转子堵转状态下各电枢等效电感值不相等的问题,在充电状态下转子需要机械堵转,避免不必要的转矩产生,然而这样会增加磨损,降低系统效率。文献[37]提出的拓扑结构相比于文献[19]中提出的一体化拓扑结构,可以防止充电期间电机转子旋转,减少不必要的系统磨损。然而,需要将额外的三相接口变换器接入驱动系统中来构成驱动充电一体化系统,电气隔离需要由车外三相供电变压器实现。
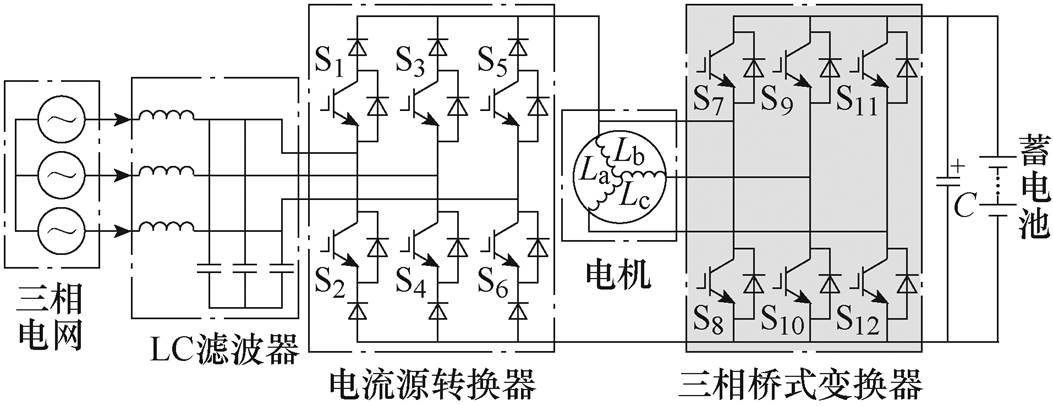
图8 基于电流源变换器的驱动充电一体化拓扑
Fig.8 Drive-charging integrated topology based on current source converter
目前,对于大多数三相充电的驱动充电一体化系统来说,电机绕组作为充电/V2G模式下拓扑结构中的一部分,绕组中通入交变电流产生旋转磁场将使系统在充电过程中产生转矩和振动[38]。一些三相充电的驱动充电一体化系统中,建议采用转子机械闭锁装置、离合器等以及通过机械开关使定子绕组重新排布,以避免电动汽车充电过程中产生转矩和振动[39-41]。然而,这些方法会降低系统性能,增加系统磨损。因此,实现充电过程中电机零转矩在电动汽车驱动充电一体化系统研究过程中具有较大挑战性。
文献[36]提出的一体化系统拓扑中包含DAB变换器,可以满足系统对大功率密度和高安全性能的要求,控制策略简单,可以消除充电转矩,但只能用于单相电网集成充电。文献[42]在文献[36]的基础上做出改进,通过继电器可以改变系统拓扑工作在不同的模式下,车载电源既可以连接至单相电网充电也可以连接至三相电网充电。文献[43]提出了一种采用耦合磁性器件(Coupled Magnetic Device, CMD)的隔离型驱动充电一体化系统,如图9所示。通过调整升压转换器中开关器件的相位,CMD可分别用作驱动模式下DC-DC变换器的升压电感器和充电模式下AC-DC变换器的隔离变压器。驱动模式下,低压电池经DC-DC变换器再经逆变器驱动电机工作,直流母线电压可以根据负载情况实时调整以提高系统效率;充电模式下,电网电压经隔离型AC-DC变换器和矩阵变换器为低压电池充电。提出的新型耦合磁性器件可以增强电路中的电感,同时降低开关频率,但需要增加额外的矩阵变换器。
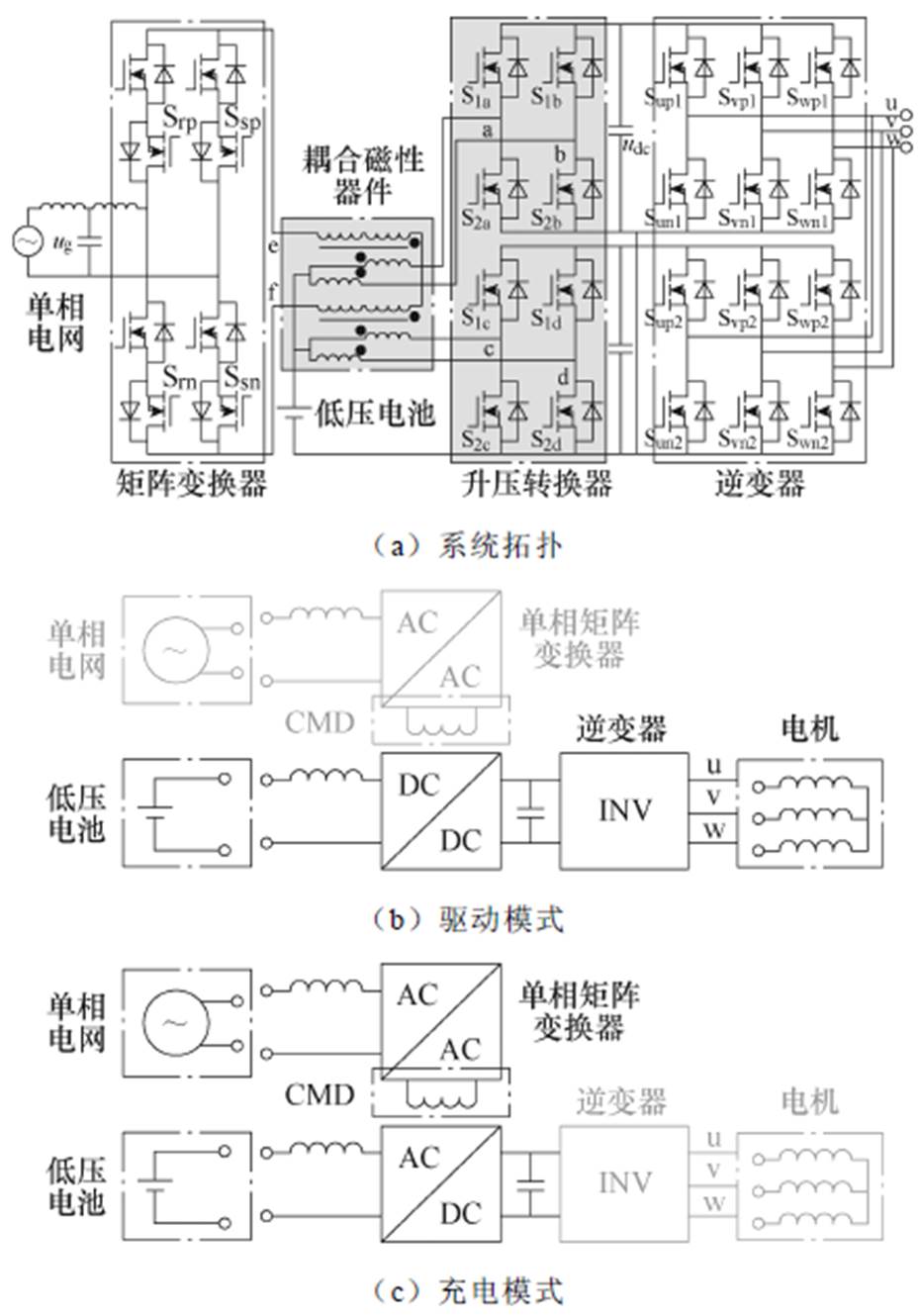
图9 采用耦合磁性器件的隔离型驱动充电一体化拓扑
Fig.9 Isolated drive-charging integrated topology using coupled-magnetic device
在已有的研究中,电机绕组复用于充电系统中通常作为充电模式下变换器中的电感,其还可以用作充电系统中的隔离变压器。当电机绕组在充电模式下被复用作隔离变压器时,其可以在静止状态下运行,也可以在旋转状态下运行。
文献[44]提出一种驱动充电一体化系统,在充电模式下,绕线转子感应电机用作降压变压器,转子绕组通过滑环和接触器连接至三相电网,定子绕组仍然连接到逆变器。采用机械锁避免在充电期间转子旋转,并且由于系统工作效率与定子和转子之间的气隙长度相关,造成较大的磁化电流,影响系统效率。文献[45]提出了一种基于双定子绕组PMSM的隔离式驱动充电一体化拓扑如图10所示,驱动模式下两组独立绕组互相串联;充电模式下,逆变器侧绕组(绕组1)用于使转子与三相电网同步,电网侧绕组(绕组2)在同步时与三相电网连接,在充电期间电机转子旋转,两组三相绕组在充电模式下充当旋转变压器。根据绕组1上感应的三相电压,由三相逆变器控制电池充电。由于与驱动模式相比,电压减半,因此最大充电功率也被限制在额定电机功率的一半。并且实际应用中,在转子轴和车轮之间需要一个离合器避免充电时电动汽车运动。此拓扑结构在20 kW的六绕组分相永磁电机系统中也得到了验证,系统在充电模式下具有快速的动态响应能力,可以以单位功率因数运行,但电池充电效率有待提高且电机谐波方面需要改进[46]。
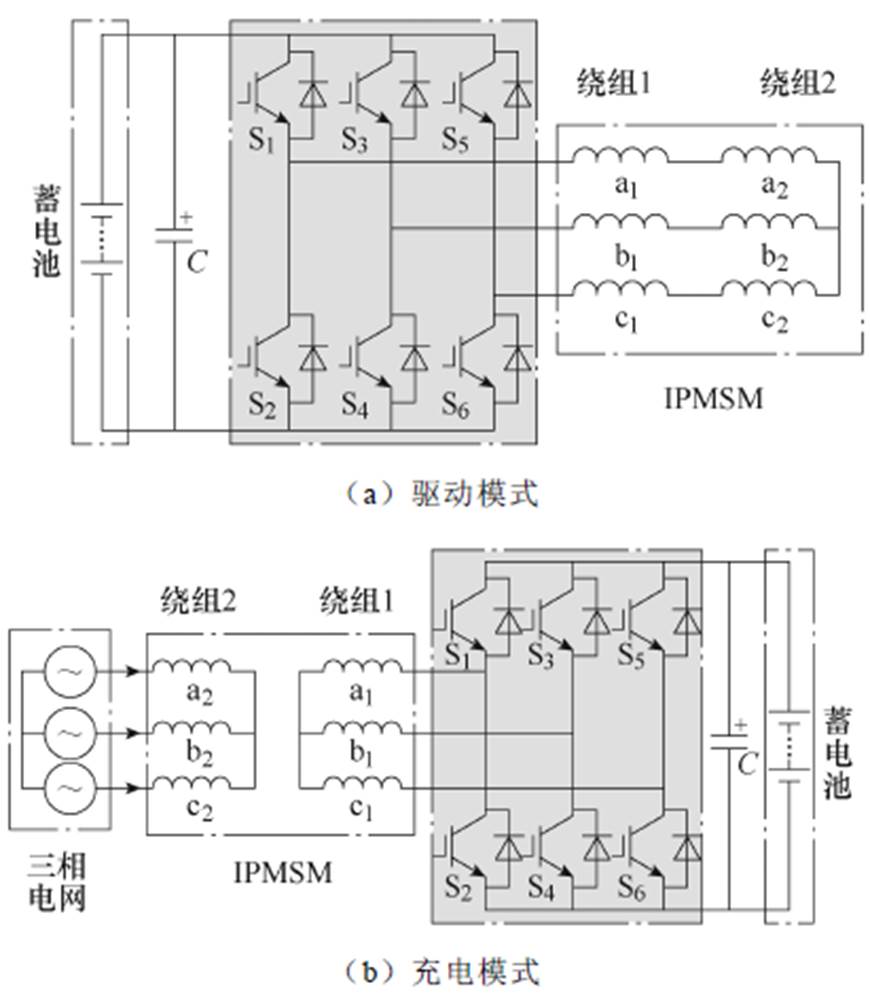
图10 基于双定子绕组PMSM的驱动充电一体化拓扑
Fig.10 Drive-charging integrated topology based on double stator winding PMSM
多相电机具有容错运行能力强、转矩脉动小、可复用绕组相数多等优点,受到越来越多的关注,近年来被广泛应用于电动汽车驱动充电一体化系统中[47]。文献[48]提出了一种基于六相开放式绕组电机的驱动充电一体化系统,如图11所示。由带有开放式绕组的对称六相电机、十二支路双向转换器和双向DC-DC变换器组成。三相电网的每一相都直接连接到定子绕组的两个中间相,因此,在进行模式切换时,无需额外的机械开关。
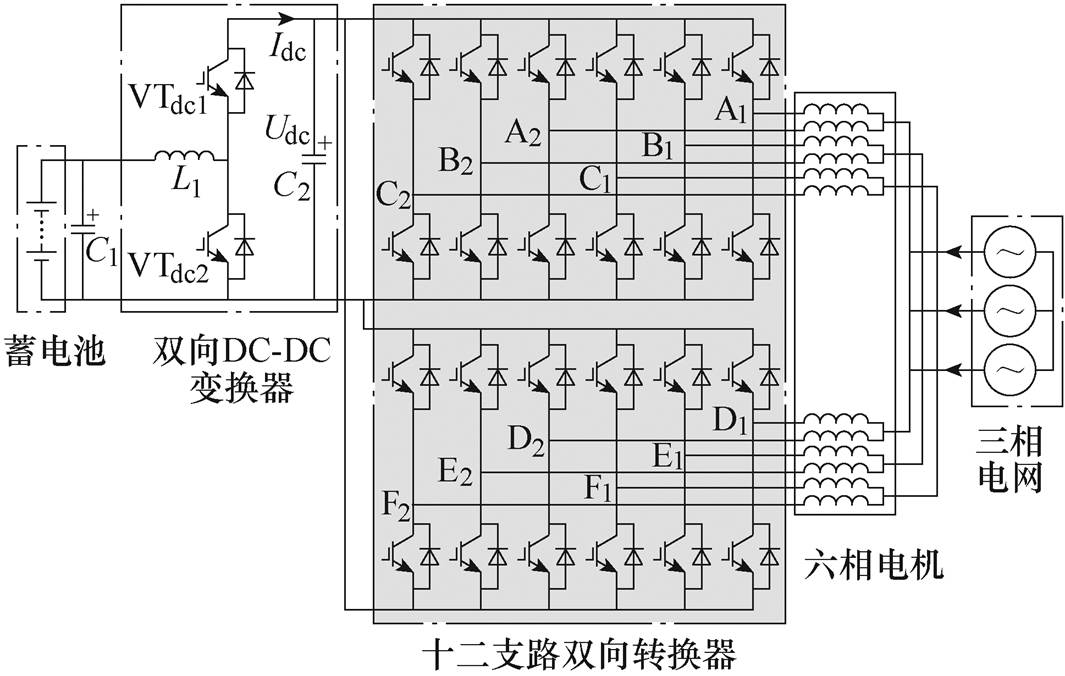
图11 基于六相开放式绕组电机的驱动充电一体化拓扑
Fig.11 Drive-charging integrated topology based on a six-phase open-end winding motor
文献[48]提出的驱动充电一体化系统可以直接将六相电机连接到三相电网,充电模式下不需要额外的机械开关,也不会产生平均电磁转矩,并且在提出的控制策略下以低总谐波畸变率和单位功率因数工作。同时,提出的系统拓扑与传统六相电机相比具有较高的容错能力。但拓扑中需要采用十二支路双向转换器,增加了一体化系统的质量与体积。
文献[49]提出一种基于对称六相电机的驱动充电一体化系统,其拓扑结构如图12所示。驱动系统中的九开关变换器以及对称六相电机绕组被复用于充电系统中。驱动模式下,Q1、Q2闭合,Q3打开,六相电机作为具有孤立中性点的电机工作;充电模式下,Q1、Q2打开,Q3闭合,九开关转换器转变为传统三相脉宽调制整流器,并经过电机绕组连接至三相电源。相较于传统车载充电系统减少了器件数量,并且可以避免充电模式下电机产生电磁转矩。但模式切换过程中需要额外的机械开关(继电器)来重新配置硬件结构,并且提出的拓扑结构中没有电气隔离,需要外加三相变压器。相比于文献[49]中传统的12相拓扑结构,减少了开关器件的数量,但需要更高的额定电压和额定电流。
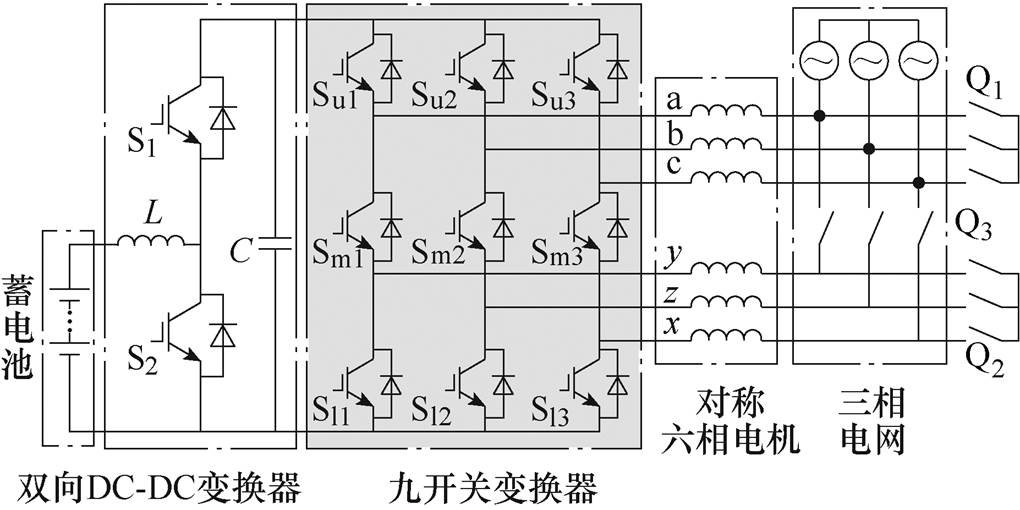
图12 基于对称六相电机的驱动充电一体化拓扑
Fig.12 Drive-charging integrated topology based on symmetrical six-phase motor
文献[50]提出一种基于五相电机的驱动充电一体化系统,适用于多相电机驱动系统,驱动模式下的逆变器和电机绕组同样被复用于充电模式中,在进行模式切换时不需要对系统中的元器件进行重新配置,只需要两个开关即可实现模式切换。并且由于多相电机中存在额外的自由度,可以避免充电模式下电流流过定子绕组产生电磁转矩,电机转子不需要被机械锁定。此系统拓扑结构在七相电机中也得到了实验验证,证明此拓扑可以被扩展至更高相数的驱动充电一体化系统中[51-52]。
文献[53]提出的集成双逆变器驱动和三相充电的驱动充电一体化系统在文献[37]的基础上作出改进,提出的一体化系统由一个三相LC滤波器、一个三相电流源转换器、一个双逆变器和两个储能单元组成,如图13所示。在驱动模式下,双逆变器驱动永磁同步电机电动运行,并且在系统中器件发生故障的情况下也可以依靠单个逆变器驱动电机工作,提高了系统的容错能力。充电模式下,采用双逆变器可以降低充电系统中的电流纹波,提高开关频率,减少所需的电机绕组漏感,网侧采用较小的LC滤波器即可。同时,通过双逆变器驱动器电机绕组保持相等的电流,可以平衡电机绕组电流,确保电机不会在充电模式下产生转矩而旋转。
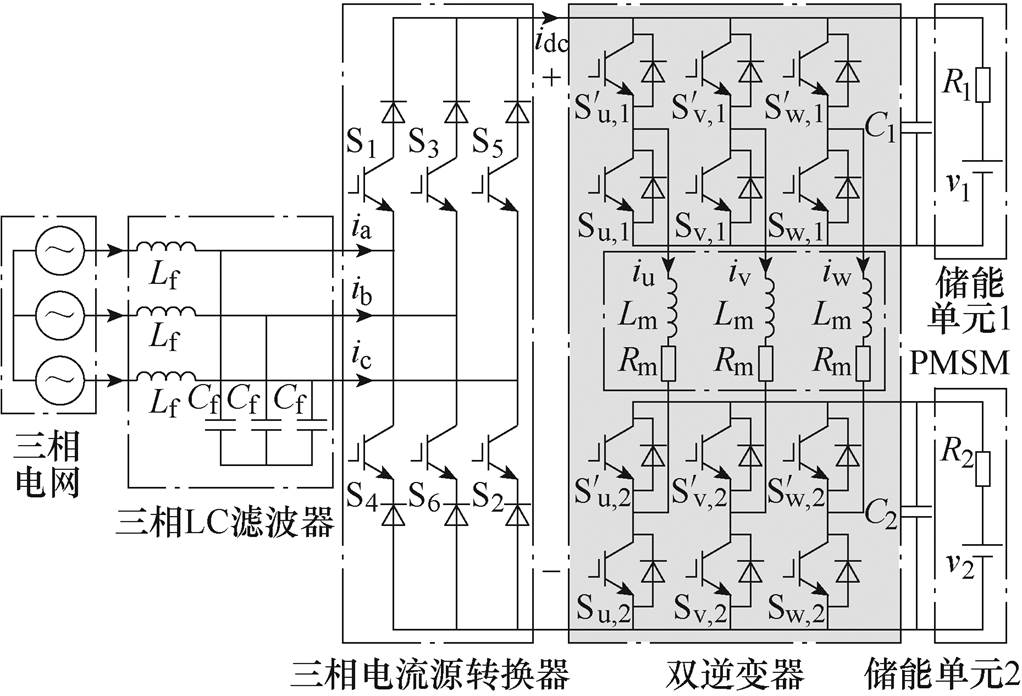
图13 基于双逆变器的驱动充电一体化拓扑
Fig.13 Drive-charging integrated topology based on the dual-inverter drive
在充电过程中,除了直接连接三相交流电网对车载储能电源进行快速充电,还可以采用直流电源接LC滤波器或者直接连接直流电源为车载储能电源充电,此外,通过将单相电网端子连接到三相电流源转换器输入中的两个,也可以实现低功率的单相交流充电。
为了进一步提高电动汽车驱动和充电系统的耦合程度,通过改变电机结构或者设计特种电机,使得电机不仅能用于驱动系统动力源,还可以用于在充电模式下实现电气隔离功能。因此,国内外学者对用于驱动充电一体化系统的特殊电机结构进行了设计与研究。
文献[54]设计了一种具有隔离充电和非隔离充电功能的分段式双定子SRM驱动充电一体化系统,如图14所示,可以减少功率开关器件的数量,同时系统可以实现驱动、非隔离充电和隔离充电等多种工作模式。驱动模式下,继电器K1、K2打开,蓄电池经两套逆变器对内外定子供电,整流桥处于空闲状态。非隔离充电模式下,继电器K1打开,继电器K2关闭,构成集成整流桥变换器、内定子绕组及其功率变换器的非隔离充电拓扑结构,并且选择合适的转子位置可以实现无转矩控制。隔离充电模式下,继电器K1关闭、继电器K2打开,外定子作为电动机由交流电网供电,带动转子转动,将电能转化为机械能,内定子作为发电机运行,将机械能转化为电能,通过控制内定子转换器对蓄电池充电。隔离充电模式下,双定子SRM可以作为旋转变压器传输具有电隔离功能,并且内外定子之间几乎没有磁场耦合。
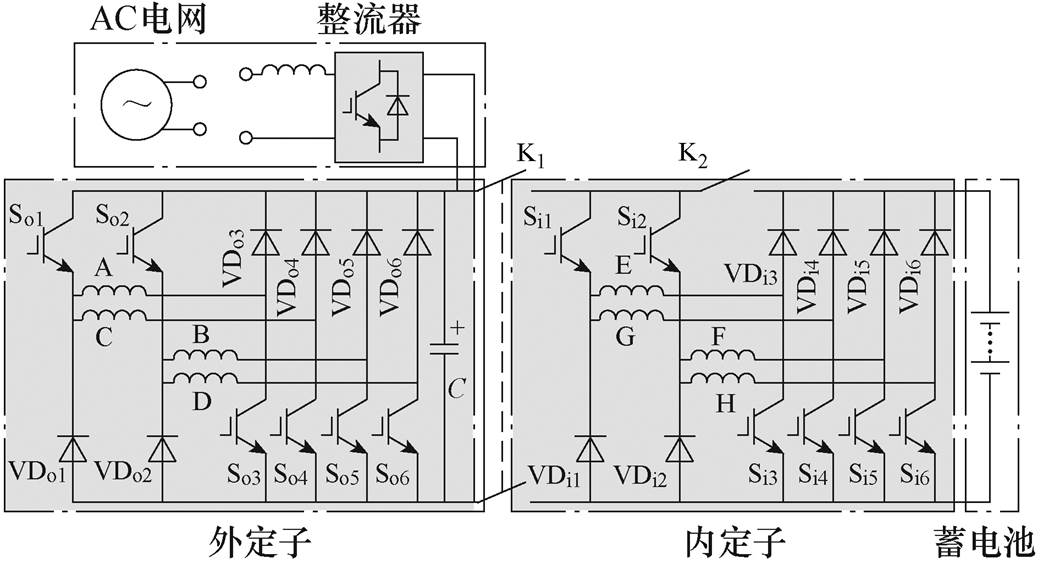
图14 基于分段式双定子SRM的驱动充电一体化拓扑
Fig.14 Drive-charging integrated topology based on segmented double-stator SRM
文献[54]中提出的驱动充电一体化系统在非隔离充电模式下,将电机绕组复用于储能电感,充电效率高,但交流电网与电池存在直接的电气连接,充电安全性能较低。而在隔离充电模式下,电池与电网之间存在电气隔离,但在此模式下电机损耗较大,充电效率低于非隔离充电模式。
本节对电动汽车驱动充电一体化系统在选用电机类型、是否采用电气隔离和零转矩控制以及额外设备等方面进行了对比分析,见表1。其中,一体化系统的部分参数在文献中未提及,在表中已用“—”标注。
表1 驱动充电一体化拓扑结构对比
Tab.1 Comparison of drive-charging integrated topology

文献电机类型隔离充电零转矩控制额外设备接入电机内部点复用电机绕组 [30]PMSM否是开关器件是是 [31]DSEM否是开关器件是是 [32]SRM否—无是是 [33]SynRM是否开关器件否是 [35]PMSM否是二极管桥否是 [36]IM是是有源缓冲器否是 [37]PMSM否—LC滤波器电流源转换器否是 [19]PMSM否否隔离变压器是是 [42]PMSM是—继电器电感器否否 [43]—是—单相矩阵变换器否否 [44]IM是否继电器否是 [45]PMSM是否继电器否是 [46]PM是否继电器否是 [48]PMSM否是无是是 [49]IM否是开关器件是是 [50]IM否是开关器件 EMI滤波器是是 [53]PMSM否是LC滤波器电流源转换器是是 [54]SRM是是继电器整流器是是
通过对驱动充电一体化拓扑结构相关文献综述,能够提炼出以下关于一体化系统拓扑研究过程中仍存在的亟待解决的几个关键技术问题:
(1)系统电气隔离问题。考虑到电动汽车工作在充电和V2G模式下的系统运行安全性,电网与车载电池之间通常需要进行电气隔离。一些文献通过加入隔离变压器或者采用隔离式DC-DC变换器来实现电气隔离,但会增加一体化系统体积和成本;另一些文献中将电机绕组重构为旋转变压器,可以节约成本并提高系统安全性,但充电/V2G模式下需要采用合适的控制策略进行充电与电网同步控制,同时系统能量转换效率和转子旋转损耗也是需要关注的问题。
(2)电机转子振动噪声问题。大多数电动汽车中采用IM和PMSM,当电机绕组在充电时复用为滤波电感,流经电机绕组的三相交流电流会引起电磁转矩产生,采用机械锁定方法可以避免充电期间转子旋转,但存在效率降低、噪声和磨损增加等缺点,并且PMSM长期工作在交流磁场,涡流损耗和磁滞损耗会增大,导致磁钢发热问题;另外,若电机绕组复用于高频电力电子电路中,其涡流损耗和磁滞损耗也会增加,进一步恶化磁钢发热问题;采用单相交流充电可以防止充电期间电机转子旋转,但充电功率较小,并且对充电接口有一定局限性;将绕组中点抽头引出并通入相同的电流,也可以解决旋转问题,但增加了开关器件,提高了电机制造成本和难度,需要设计相应的零转矩控制策略;将电机绕组重构为旋转变压器,增加了电机结构和控制策略设计的复杂性,并且带来了旋转损耗问题。
(3)车载电池电压与直流母线电压、电网电压匹配问题。传统电机驱动系统采用单级变换器结构,然而车载电池一般为低压电池系统,并且AC-DC变换器对直流侧电压也有一定限制。因此,通常在系统中加入双向DC-DC变换器构成双极变换器拓扑,虽然会造成额外的变换器功率损耗,但是可以更好地匹配车载电池电压与直流母线电压、电网电压,另外,需要采用合适的驱动充电控制策略来动态控制直流母线电压,提高整个系统效率。
电动汽车驱动充电一体化系统具有多功能运行模式,包括驱动模式、制动模式、充电模式和V2G模式,不同的运行模式都需要相应的控制策略进行调控。因此,针对不同运行模式下的一体化系统拓扑结构,研究者们对其控制策略进行了分析研究。
文献[55]设计了一种基于SRM的驱动充电一体化系统,采用电流滞环控制方法控制系统运行在牵引电池单独驱动、发电机单独驱动、牵引电池和发电机共同驱动以及退磁能量回收四种驱动模式,并将直流母线侧电容C3电压uC3和转速的关系查找表加入电压控制闭环中,如图15所示,根据转速值选择电压给定值控制双向DC-DC变换器。该驱动控制策略下系统具有较好的高速运行性能,但当电动汽车运行工况复杂多变时,系统驱动模式下无法动态跟踪负载变化。
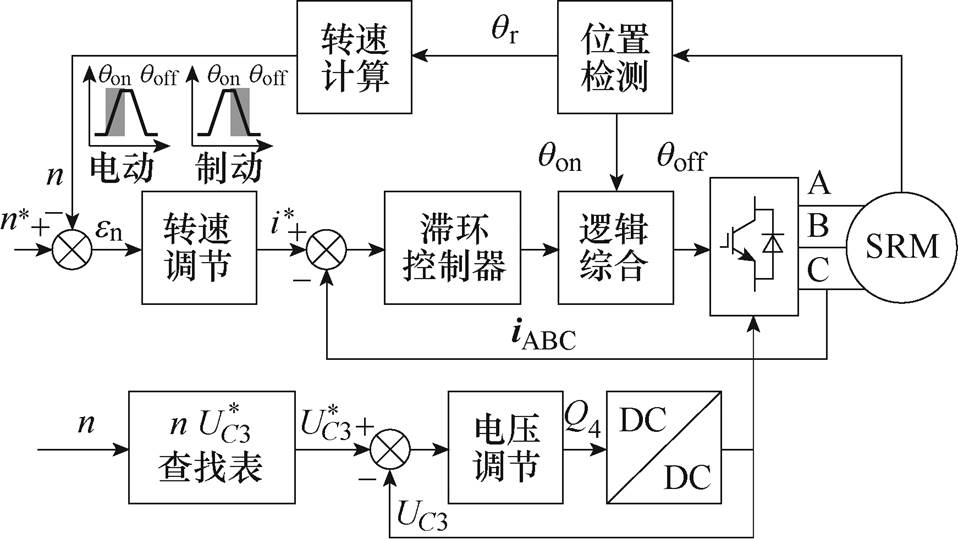
图15 驱动模式下电流滞环控制策略
Fig.15 Current hysteresis control strategy under the driving mode
文献[56]针对文献[31]中所设计的驱动充电一体化系统,提出了一种用于驱动模式的电流协调控制策略,能够显著降低系统铜损,提高系统效率和动态性能,如图16所示。控制方案中将最小铜损(Minimum Copper Loss, MCL)法和最大励磁电流(Maximum Field Current, MFC)法相结合,将参考转速和反馈转速之间的误差值作为判断条件,当转速误差超过设定的阈值时,采用MFC法并将其最大励磁电流设定为额定值的1.5倍以提高加速时的输出转矩性能;当转速误差小于阈值时,根据MCL法得到励磁电流参考值。为了防止动态过程中直流母线电压波动,将直流母线电压闭环加入控制环中,最终可以得到q轴电流参考值,实现多目标电流协调控制。该控制方法可以有效降低系统铜损,提高系统承载能力和运行效率,并且在动态加速过程中能够消除直流母线电压波动,大大提高系统稳定性。
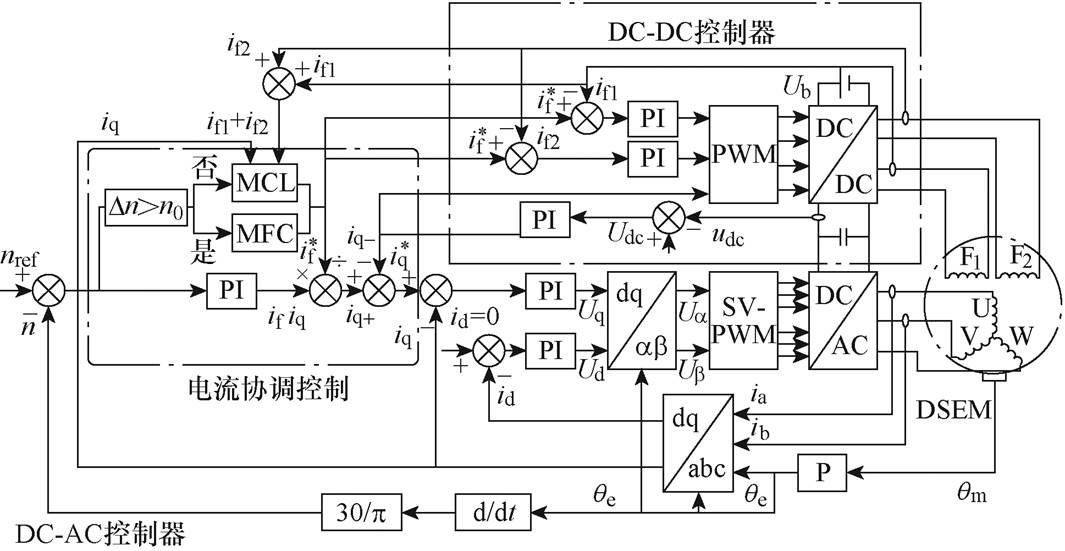
图16 驱动模式下电流协调控制策略
Fig.16 Current coordination control strategy under the driving mode
当电动汽车在运行过程中频繁刹车或持续下坡时,电机处于制动工况,此时直流母线上会产生大量再生能量,通常通过电阻以热能形式消耗,不仅造成能源浪费,还会因为温升引发车辆安全问题。采用动力电池将这部分能量进行回收再利用,可以大大提高系统能量利用效率。文献[32]针对图4所示的基于四相八槽六极(8/6)开关磁阻电机的驱动充电一体化系统,提出了驱动和制动模式下的控制框图,如图17所示。通过改变导通角 和关断角
和关断角 控制电磁转矩方向来改变电机运行模式,当给定速度小于实际速度时,有源相位绕组处于下降电感区对应关断角位置产生负转矩,判断得到电机处于制动模式。当控制变换器Ⅰ和变换器Ⅱ其中一个工作在制动模式,另一个将处于禁用模式,不仅可以回收制动能量,还可以调整两电池E1和E2的SOC平衡。文献[32]采用两组电池和变换器结构来提高系统可靠性,但由于电池比功率低的特性,需要频繁大电流充放电以满足负载侧大功率需求并快速回收再生能量,会大大缩短电池寿命。同时,提出的控制策略没有考虑电池充放电特性,无法对电池充放电进行控制。
控制电磁转矩方向来改变电机运行模式,当给定速度小于实际速度时,有源相位绕组处于下降电感区对应关断角位置产生负转矩,判断得到电机处于制动模式。当控制变换器Ⅰ和变换器Ⅱ其中一个工作在制动模式,另一个将处于禁用模式,不仅可以回收制动能量,还可以调整两电池E1和E2的SOC平衡。文献[32]采用两组电池和变换器结构来提高系统可靠性,但由于电池比功率低的特性,需要频繁大电流充放电以满足负载侧大功率需求并快速回收再生能量,会大大缩短电池寿命。同时,提出的控制策略没有考虑电池充放电特性,无法对电池充放电进行控制。
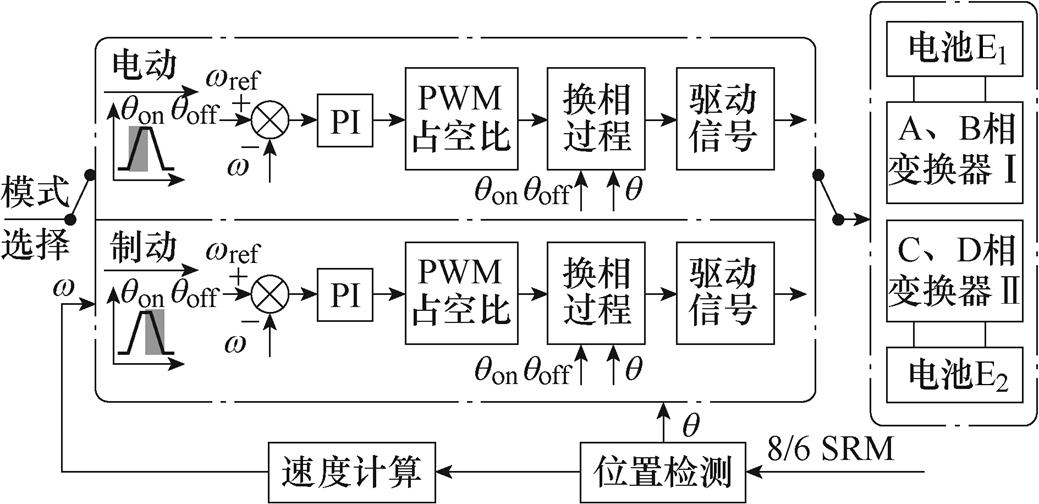
图17 文献[32]提出的驱动和制动模式下控制框图
Fig.17 Control block diagram under driving and braking modes proposed in Ref.[32]
文献[57]提出了一种用于无刷直流电机驱动充电一体化系统的再生充电控制方案,如图18所示。针对电动汽车在负载突变情况下控制系统实时跟踪性能较差的问题,结合模糊控制和滑模控制技术提出了基于Tagaki-Sugeno的模糊滑模控制用于再生充电控制,建立了表征变换器非线性动态性能的线性小信号模型,能够更好地跟踪系统中的电压电流时变信号,提高系统充电效率和系统稳定性。但制动模式下采用恒压充电方式,充电初期电流较大,对电池寿命影响较大,并且无法实时跟踪负载功率快速回收直流母线侧再生能量。
传统电动汽车将单一蓄电池用作系统动力来源,当负载侧突增大功率需求或者直流母线有大量再生能量集聚时,由于蓄电池功率密度低无法快速匹配负载功率需求,并且大电流充放电也会缩短电池寿命。而超级电容具有高功率密度、循环寿命长等特点,通常与蓄电池结合构成混合电源系统,兼顾高能量密度和高功率密度,还可以延长动力电池使用寿命[58-60]。并且,V2G模式下超级电容还可以及时有效参与电网频率调节,根据电网负荷变化快速切换,提供瞬时功率。因此,蓄电池-超级电容混合电源系统被广泛应用于电动汽车中,为了能够充分发挥储能元件各自的优势,使系统性能最优,需要研究合适的功率控制策略用于混合电源系统中储能元件之间的功率分配[61-63]。
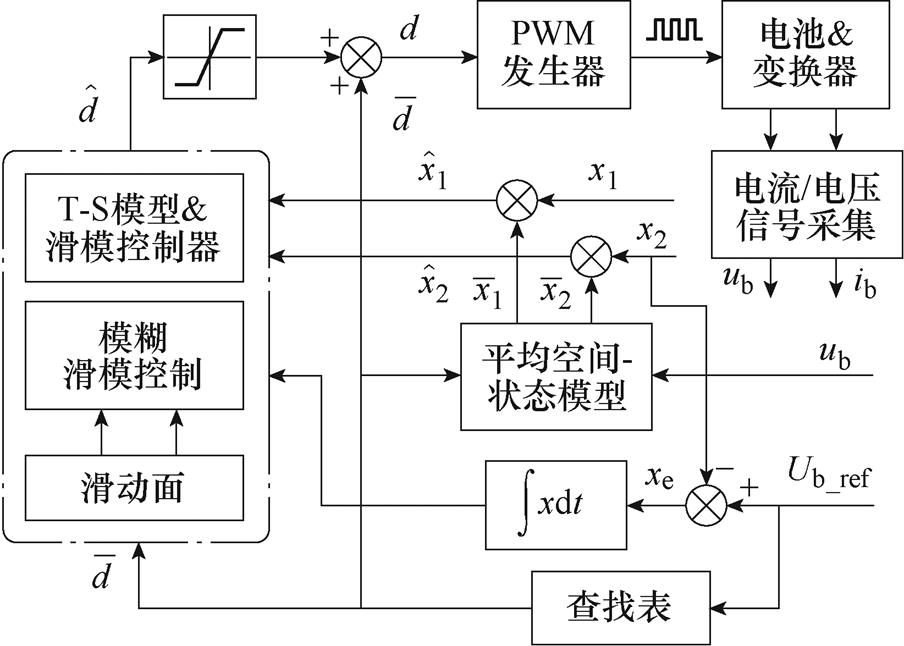
图18 基于Tagaki-Sugeno的模糊滑模再生充电控制
Fig.18 Regenerative charging control based on Tagaki-Sugeno fuzzy sliding-mode
文献[64]针对电动汽车电池/超级电容混合储能系统功率分配问题,提出了一种多目标优化功率控制策略,如图19所示,以延长电池寿命和减小混合储能系统功率损耗。利用动态规划对不同驱动周期数据集进行优化求解,采用神经网络对动态规划结果进行训练,从而实现在线功率最优分配。然而,提出的控制策略仍然依赖已知的驾驶周期和高计算负担,不确定的复杂变化工况下的实时动态性能有待提高。
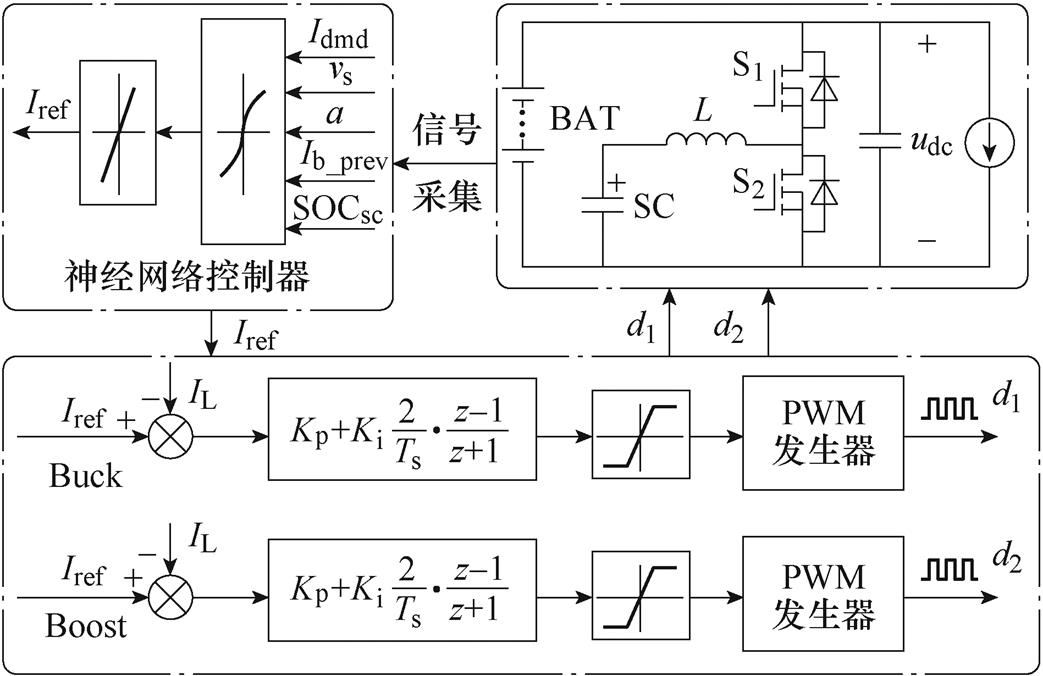
图19 电动汽车混合储能系统多目标优化功率控制策略
Fig.19 Multi-objective optimal power control strategy for hybrid energy storage system of electric vehicle
目前,电动汽车驱动充电一体化系统中电机绕组复用于充电拓扑将会引入一些新的问题:①引起电机转矩和噪声问题;②电机绕组用于滤波器电感值难以评估。2.6节中介绍的基于多相电机驱动充电一体化拓扑,虽然可以避免充电模式下电机产生转矩,但部分拓扑充电模式下电机仍会不断振动,产生噪声。并且,充电模式下同一转子位置处各相气隙长度不同,导致电机各相绕组参数也不同,充电时各相电流不平衡,国内外一些学者从控制策略角度对比进行了研究[65-66]。
文献[67]针对五相混合励磁磁通开关电机提出了一种充电模式电流控制方法。为了保证多相电机绕组并联式一体化系统充电时各相绕组中电流平衡,文献[67]提出了电流滞环控制和电流矢量控制两种绕组电流平衡算法,如图20所示。电流滞环控制方法直接将四相绕组给定电流与实际电流值作差,再经比例谐振控制器后由PWM发生器生成占空比信号。电流矢量控制方法是将实际电流值经坐标变换后与电流给定值作差,经比例谐振控制器后得到静止两相电压矢量,再经坐标变换得到五相电压矢量通过PWM发生器生成占空比信号。
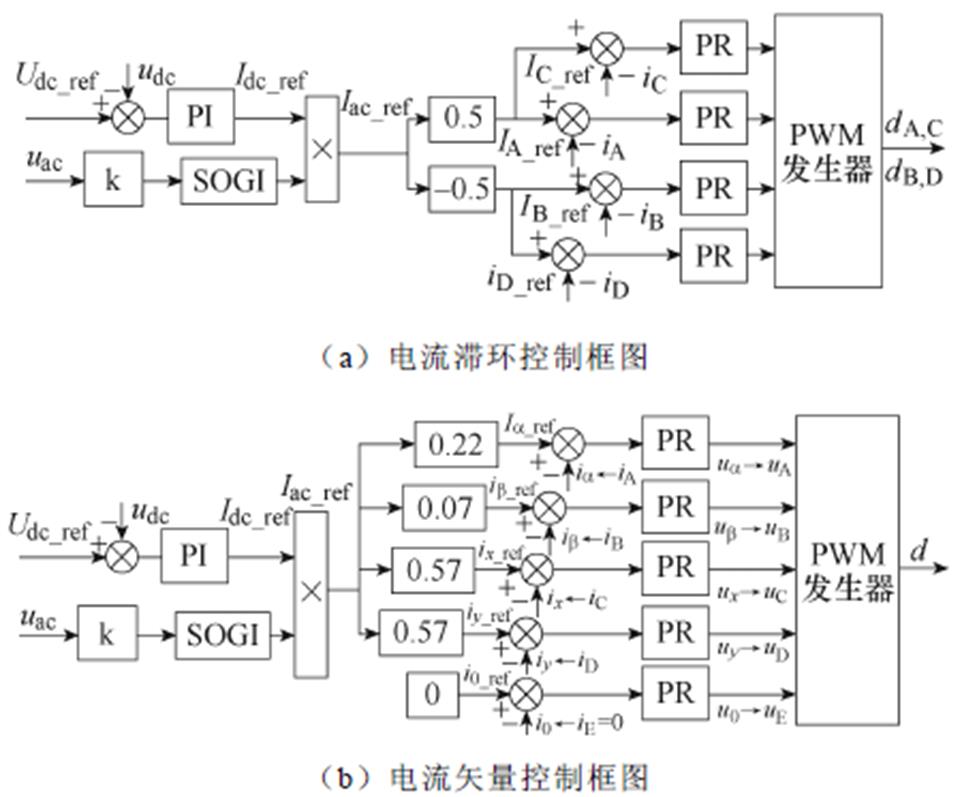
图20 基于五相电机的驱动充电一体化系统电流平衡控制方法
Fig.20 Current balance control method of drive-charging integrated system based on five-phase motor
文献[68]针对电动汽车六相驱动充电一体化系统,提出了一种脉宽调制转子定位方法来确定转子位置,可以实现电机零转矩充电。此方法同样需要在电动汽车充电之前根据提出的位置法将转子旋转到转矩消除位置,当充电开始后,电机转矩在0附近仍有微小波动。并且,为了实现充电过程电气隔离,需要额外的隔离变压器。
文献[69]为避免六相电机驱动充电复用时存在的环流问题,采用双模块三相电机,提出了一种优化并网电流控制策略,通过调整定子磁动势来实现永磁同步电机驱动系统复用充电时单相和三相零转矩并网控制。如图21a所示,单相并网时电机A相绕组接入单相电网,A相电网电流iA等于电网电流,并且根据建立的B相电网电流iB、C相电网电流iC与电机d轴位置角 之间的约束关系,经3s/2r坐标变换得到dq轴给定电流,最后使用比例-谐振调节得到变压器电压输出经空间矢量调制输出驱动信号。
之间的约束关系,经3s/2r坐标变换得到dq轴给定电流,最后使用比例-谐振调节得到变压器电压输出经空间矢量调制输出驱动信号。
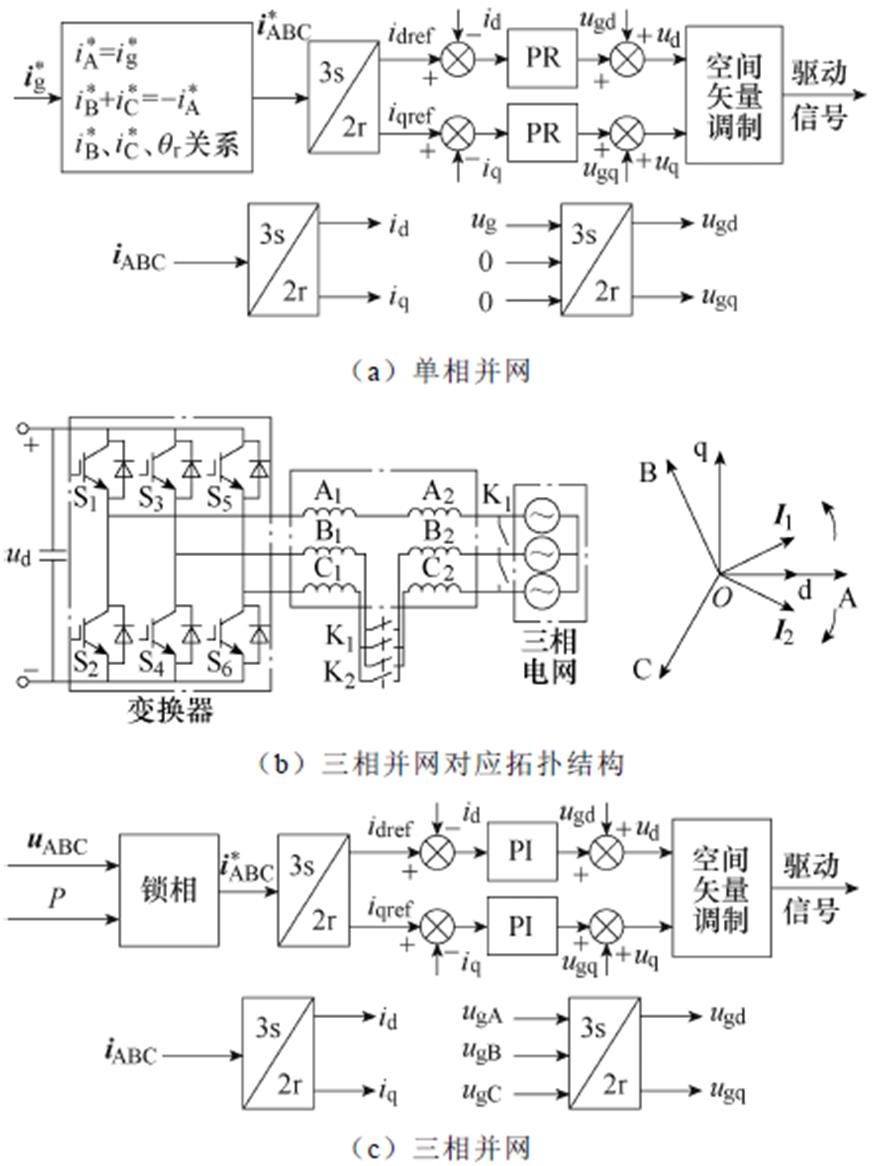
图21 基于双模块三相电机驱动充电一体化系统电流控制策略
Fig.21 Current control strategy of drive-charging integrated system based on dual-module three-phase motor
图21b为接三相电网时系统驱动充电切换拓扑,当电机工作在驱动模式时,K1继电器闭合,K2继电器断开;当电机工作在充电模式时,K1继电器断开,K2继电器闭合。当电机接三相电并网时,两套绕组的电流矢量I1、I2幅值相等,旋转方向相反,电机的永磁转矩和磁阻转矩相互抵消。三相并网控制过程中需要确定充电功率P,经锁相环、电流环,最后经空间矢量调制得到变换器驱动信号。因此,三相并网情况下可以实现电机零转矩控制。
然而,上述一体化系统在每次充电前都需要对转子进行定位,以确保d轴位置与一相绕组对齐;提出的驱动充电一体化拓扑切换时需要经继电器切换,较为复杂,并且电路中缺少电气隔离装置,系统安全性能较低。
文献[70]提出了基于零转矩充电运行的统一判据,对等效滤波器电感进行了分析,为不同类型的电动汽车提供了通用的设计方案。针对丰田普锐斯汽车一体化系统,验证了统一判据与提出的高性能控制策略的可行性。充电模式下控制框图由电压外环、电流内环、相电流均衡补偿以及交错脉宽调制构成,如图22所示。采用陷波滤波器滤除直流母线电压外环中较大的纹波分量;采用比例谐振控制器实现高功率因数;通过交错脉宽调制提高等效开关频率,降低输入电流开关纹波;经相电流均衡补偿以保证相电流平衡。
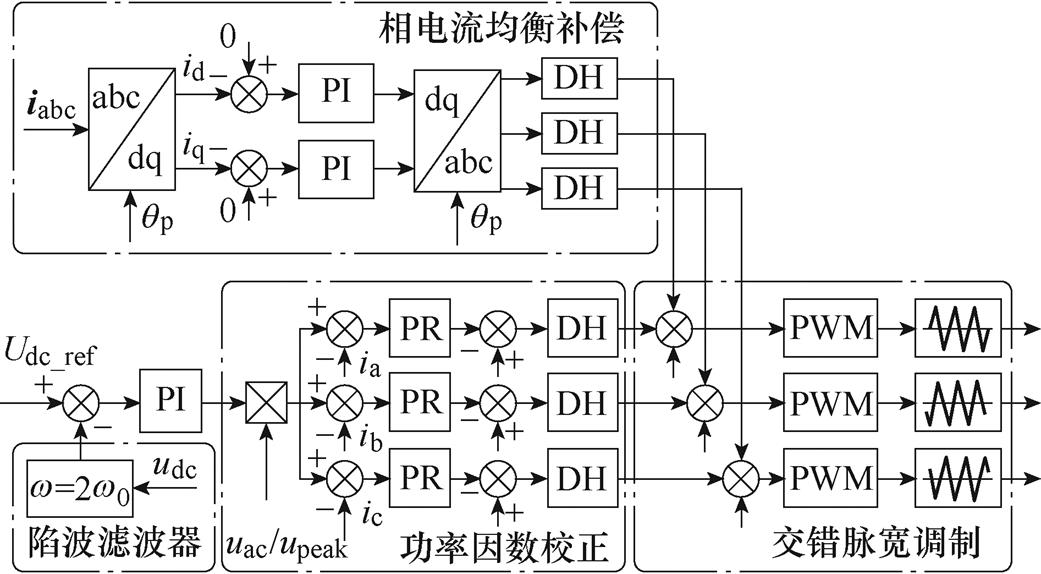
图22 文献[70]提出的零转矩充电运行控制策略
Fig.22 Zero-torque charging operation control strategy proposed in Ref.[70]
本节针对电动汽车不同运行模式下提出的相关控制策略进行了对比分析,见表2。通过对驱动充电一体化系统控制策略相关文献进行综述,对一体化系统不同运行模式控制过程中仍待解决的核心问题总结如下:
(1)驱动/制动运行模式下需要考虑采用优化控制策略实现电机高输出转矩和高功率密度,提高系统的功率输出能力。考虑采用双极式拓扑结构并对其中的双向DC-DC变换器进行控制,快速跟踪负载功率,优化电池放电过程,减少电流纹波和直流母线波动,并能够实现能量回收再利用,提高系统能量利用率。
表2 不同运行模式下控制策略对比
Tab.2 Comparison of control strategies under different operating modes

运行模式参考文献控制方法对比分析 驱动/制动模式[55]电流滞环控制高速运行性能,但无法动态跟踪负载变化 [56]多目标电流协调控制有效降低铜损,提高系统运行效率和稳定性 [32]考虑电机制动控制快速回收制动能量,频繁大电流充放电缩短电池寿命 [57]模糊滑模再生充电控制实时跟踪电压电流信号,但恒压充电初期电流较大 [64]基于混合储能系统的多目标优化功率控制实现在线功率最优分配,但依赖已知驾驶周期和高计算负担 充电/ V2G模式[67]基于五相电机的电流平衡控制保证多相电机充电时各相绕组中电流平衡 [68]基于六相电机的脉宽调制转子定位方法实现零转矩充电,但转矩在0附近仍有波动 [69]基于双模块三相电机的优化并网电流控制实现零转矩充电,但需要对转子定位,模式切换较为复杂 [70]基于零转矩充电的统一判据降低电压电流纹波的同时实现高功率因数并保证相电流平衡
(2)现有文献在充电/V2G模式下相关控制策略主要针对零转矩与充电各相电流平衡控制,需要寻求相关优化控制策略以提高充电效率,改善电源系统充电性能,能够在快速充电的同时减小电池损耗,并且可以根据电网需求,实现任意功率因数运行,辅助电网进行电能质量调节。
电动汽车驱动充电一体化系统将传统驱动系统中变换器和电机绕组等部件在充电系统中重新使用,可以节省成本,减轻汽车体积与质量,是提高电动汽车功率密度的主要趋势之一。目前,电动汽车驱动充电一体化系统作为一项前瞻性的创新技术,仍有许多关键问题亟待解决。未来,电动汽车驱动充电一体化系统依旧是一大研究热点,本文对其后续的研究与发展方向展望如下:
(1)由于电动汽车驱动系统和充电系统在使用周期上是独立的,并且驱动系统通常是针对高功率设计的,复用于充电系统可以增加充电功率。为了满足便携性及经济性的要求,需尽量减少附件元器件与部件的数量,降低系统制造成本。同时,一体化拓扑结构应尽可能简单,避免系统中机械开关失灵造成的设备故障及损耗问题,以提高系统可靠性。
(2)传统充电系统采用单级式拓扑,结构简单,但需要并联大电容在AC-DC变换器直流侧,对保护电路要求较高。为了更好地处理车载电池与直流母线电压匹配问题,需要构建双级式拓扑,第一级为AC-DC变换器负责整流和功率因数校正,第二级为DC-DC变换器负责电压匹配。因此,挖掘新的电机结构用于驱动充电一体化系统中,设计文献[31]中具有两套独立绕组的双凸极电磁电机或者混合励磁电机等,将成为一个持续发展的研究方向。
(3)为了实现电动汽车安全、可靠充电运行,往往需要在车载电源与交流电网之间加入电气隔离,加入额外的设备如隔离式DC-DC变换器或隔离变压器均会带来系统体积成本增加的问题,通过设计特殊电机结构并将电机绕组进行重构成为旋转变压器同样可以实现充电系统中电气隔离,但充电模式下系统的可靠性与电气隔离部分的能量转换效率及损耗问题,都将是一体化系统未来的研究热点。
(4)电动汽车一体化系统充电过程中流经电机绕组的电流会产生电磁转矩,因此,充电模式下需要将电机转子机械固定,使其停转,而磁场在带有凸极性的转子磁导作用下易产生感生电压畸变,会带来严重的振动噪声问题,同时涡流损耗和磁滞损耗也会增大,引发磁钢发热问题。目前,大多数学者针对一体化系统充电模式下零转矩控制进行研究,同时对充电模式下电机绕组电感值不等问题进行电流均衡控制;另外,采用特殊电机结构在充电模式下,将电机绕组复用于起电气隔离作用的旋转变压器时,通过保证电机转子与两套绕组电气量同步,即始终保持同步旋转,也可以减少电机振动噪声。上述两种一体化系统拓扑设计与控制研究也是未来发展的一个研究热点。
(5)目前,对电动汽车驱动充电一体化系统的研究大多停留在拓扑结构改进,以及驱动模式下电机性能、充电/V2G模式下零转矩控制和单位功率因数控制等相关控制策略的设计等方面。而对电动汽车制动模式下一体化系统进行能量回收再利用的相关研究较少。此外,由于电动汽车运行工况复杂多变,系统运行模式随机切换,研究其在一个运行周期内的系统运行效率也是一种研究方向。电动汽车电动和驱动模式下,对负载能量进行实时跟踪、储能元件能量检测以及采用混合能源系统进行能量动态分配研究,实现系统能量利用效率提升;充电和V2G模式下,根据混合能源系统充放电效率进行控制优化,辅助电网进行电能质量调节,但需要注意的问题是,在实现充电/V2G模式下效率最优控制的同时还需保证驱动模式下电机性能。另外,还可通过设计多目标能量效率优化控制策略,以电动汽车多种运行模式下系统运行效率为优化目标,从而实现一个完整运行周期内的电源系统能量利用效率最优。
为了解决传统车载充电系统质量体积大、充电容量受限等问题,有关研究提出了“驱动充电一体化”拓扑结构,通过将驱动系统中部分器件复用于充电系统中,并采取相应控制策略实现驱动充电一体化,以实现电动汽车中功率变换系统轻量化和高度集成化。本文在已有研究的基础上,根据电动汽车不同应用场合,对近年来各文献提出的各类驱动充电一体化系统进行分类梳理,详细阐述了各类型一体化系统的拓扑结构及优缺点。然后,对目前驱动充电一体化系统中存在的问题进行归纳总结,并针对这些问题对电动汽车不同运行模式下的控制策略进行了综述。最后,展望了电动汽车驱动充电一体化系统可能的研究方向,为后续进一步研究一体化系统提供了借鉴。
随着电动汽车技术的不断发展,驱动充电一体化系统设计已成为必然趋势,未来的研究工作中,在充分考虑器件高效复用功能的同时,考虑整个系统能量利用效率的综合优化设计也将成为该研究领域进一步突破与发展的关键。
参考文献
[1] Su Yiyan, Liang Deliang, Kou Peng. MPC-based torque distribution for planar motion of four-wheel independently driven electric vehicles: considering motor models and iron losses[J]. CES Transactions on Electrical Machines and Systems, 2023, 7(1): 45-53.
[2] 姚一鸣, 赵溶生, 李春燕, 等. 面向电力系统灵活性的电动汽车控制策略[J]. 电工技术学报, 2022, 37(11): 2813-2824.
Yao Yiming, Zhao Rongsheng, Li Chunyan, et al. Control strategy of electric vehicles oriented to power system flexibility[J]. Transactions of China Electro- technical Society, 2022, 37(11): 2813-2824.
[3] Yu Zhiyue, Gan Chun, Ni Kai, et al. Dual-electric- port bidirectional flux-modulated switched reluctance machine drive with multiple charging functions for electric vehicle applications[J]. IEEE Transactions on Power Electronics, 2021, 36(5): 5818-5831.
[4] Gao Jialou, Sun Wei, Jiang Dong, et al. Improved operation and control of single-phase integrated on- board charger system[J]. IEEE Transactions on Power Electronics, 2021, 36(4): 4752-4765.
[5] Raherimihaja H J, Zhang Qianfan, Xu Guoqiang, et al. Integration of battery charging process for EVs into segmented three-phase motor drive with V2G-mode capability[J]. IEEE Transactions on Industrial Elec- tronics, 2021, 68(4): 2834-2844.
[6] 佟明昊, 程明, 许芷源, 等. 电动汽车用车载集成式充电系统若干关键技术问题及解决方案[J]. 电工技术学报, 2021, 36(24): 5125-5142.
Tong Minghao, Cheng Ming, Xu Zhiyuan, et al. Key issues and solutions of integrated on-board chargers for electric vehicles[J]. Transactions of China Elec- trotechnical Society, 2021, 36(24): 5125-5142.
[7] Tong Minghao, Cheng Ming, Wang Sasa, et al. An on-board two-stage integrated fast battery charger for EVs based on a five-phase hybrid-excitation flux- switching machine[J]. IEEE Transactions on Indu- strial Electronics, 2021, 68(2): 1780-1790.
[8] 刘莹, 王辉, 漆文龙. 电动汽车驱动系统与蓄电池充电一体化混合拓扑研究综述[J]. 电力自动化设备, 2013, 33(10): 143-149, 156.
Liu Ying, Wang Hui, Qi Wenlong. Summary of integrated topology of EV traction system and battery charging system[J]. Electric Power Automation Equipment, 2013, 33(10): 143-149, 156.
[9] Mukundan S, Dhulipati H, Lai Chunyan, et al. Design and optimization of traction IPMSM with asymmet- rical damper bars for integrated charging capability using evolutionary algorithm[J]. IEEE Transactions on Energy Conversion, 2018, 33(4): 2060-2069.
[10] Li Xianglin, Shen Fawen, Yu Shiyang, et al. Flux- regulation principle and performance analysis of a novel axial partitioned stator hybrid-excitation flux- switching machine using parallel magnetic circuit[J]. IEEE Transactions on Industrial Electronics, 2021, 68(8): 6560-6573.
[11] Thimmesch D. An SCR inverter with an integral battery charger for electric vehicles[J]. IEEE Transa- ctions on Industry Applications, 1985, IA-21(4): 1023-1029.
[12] Ripple W E. Integrated traction inverter and battery charger apparatus: U.S. Patent 4920475[P]. 1990- 04-24.
[13] Bruyère A, De Sousa L, Bouchez B, et al. A multiphase traction/fast-battery-charger drive for electric or plug-in hybrid vehicles: solutions for control in traction mode[C]//2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 2011: 1-7.
[14] Glanzer G, Sivaraman T, Buffalo J I, et al. Cost- efficient integration of electric vehicles with the power grid by means of smart charging strategies and integrated on-board chargers[C]//2011 10th Inter- national Conference on Environment and Electrical Engineering, Rome, Italy, 2011: 1-4.
[15] Woo D G, Choe G Y, Kim J S, et al. Comparison of integrated battery chargers for plug-in hybrid electric vehicles: Topology and control[C]//2011 IEEE Inter- national Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 2011: 1294- 1299.
[16] Dusmez S, Khaligh A. A novel low cost integrated on-board charger topology for electric vehicles and plug-in hybrid electric vehicles[C]//2012 Twenty- Seventh Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 2012: 2611-2616.
[17] Zhao Shuang, Haghbin S, Wallmark O, et al. Transient modeling of an integrated charger for a plug-in hybrid electric vehicle[C]//Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 2011: 1-10.
[18] Haghbin S, Lundmark S, Alakula M, et al. Grid- connected integrated battery chargers in vehicle applications: review and new solution[J]. IEEE Transactions on Industrial Electronics, 2013, 60(2): 459-473.
[19] Lu Xiaomin, Iyer K L V, Mukherjee K, et al. Investigation of integrated charging and discharging incorporating interior permanent magnet machine with damper bars for electric vehicles[J]. IEEE Transactions on Energy Conversion, 2016, 31(1): 260-269.
[20] 魏维, 王洪军, 周伟. 电动汽车及其集成控制系统: CN103182951A[P]. 2015-11-25.
[21] 孙鹤旭, 张厚升. 电动汽车驱动一体化系统牵引模式下逆变器的开路容错控制策略[J]. 电测与仪表, 2016, 53(17): 34-38, 43.
Sun Hexu, Zhang Housheng. A novel tolerant control strategy for the inverter of the EV integrated traction system[J]. Electrical Measurement & Instrumentation, 2016, 53(17): 34-38, 43.
[22] 李春杰, 黄文新, 卜飞飞, 等. 电动汽车充电与驱动集成化拓扑[J]. 电工技术学报, 2017, 32(12): 138-145.
Li Chunjie, Huang Wenxin, Bu Feifei, et al. The integrated topology of charging and drive for electric vehicles[J]. Transactions of China Electrotechnical Society, 2017, 32(12): 138-145.
[23] Abdel-Majeed M S, Eldeeb H M, Metwly M Y, et al. Postfault operation of onboard integrated battery charger via a nine-phase EV-drive train[J]. IEEE Transactions on Industrial Electronics, 2021, 68(7): 5626-5637.
[24] Yu Feng, Zhang Wei, Shen Yanchi, et al. A nine- phase permanent magnet electric-drive-reconstructed onboard charger for electric vehicle[J]. IEEE Transa- ctions on Energy Conversion, 2018, 33(4): 2091- 2101.
[25] Vidya V, Kaarthik R S. Modeling and control of an integrated battery charger with split-phase machine[J]. IEEE Transactions on Industry Applications, 2021, 57(2): 1588-1597.
[26] Zhang Qianfan, Raherimihaja H J, Xu Guoqiang, et al. Design and performance analysis of segmented three-phase IPMSM for EVs integrated battery charger[J]. IEEE Transactions on Industrial Elec- tronics, 2021, 68(10): 9114-9124.
[27] Semsar S, Soong T, Lehn P W. On-board single-phase integrated electric vehicle charger with V2G fun- ctionality[J]. IEEE Transactions on Power Electronics, 2020, 35(11): 12072-12084.
[28] Yang Zhi, Shang Fei, Brown I P, et al. Comparative study of interior permanent magnet, induction, and switched reluctance motor drives for EV and HEV applications[J]. IEEE Transactions on Transportation Electrification, 2015, 1(3): 245-254.
[29] 闫文举, 陈昊, 刘永强, 等. 一种用于电动汽车磁场解耦型双定子开关磁阻电机的新型功率变换器[J]. 电工技术学报, 2021, 36(24): 5081-5091.
Yan Wenju, Chen Hao, Liu Yongqiang, et al. A novel power converter on magnetic field decoupling double stator switched reluctance machine for electric vehicles[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5081-5091.
[30] 张飞龙, 王晓琳, 顾聪, 等. 基于电机定子绕组开路的电机驱动和充放电集成系统研究[J]. 电工技术学报, 2019, 34(18): 3778-3787.
Zhang Feilong, Wang Xiaolin, Gu Cong, et al. Research on integrated system of motor drive and charging/discharging based on open motor stator winding[J]. Transactions of China Electrotechnical Society, 2019, 34(18): 3778-3787.
[31] Wei Jiadan, Chen Jinchun, Liu Peng, et al. The optimized triloop control strategy of integrated motor- drive and battery-charging system based on the split- field-winding doubly salient electromagnetic machine in driving mode[J]. IEEE Transactions on Industrial Electronics, 2021, 68(2): 1769-1779.
[32] Hu Yihua, Gan Chun, Cao Wenping, et al. Split converter-fed SRM drive for flexible charging in EV/HEV applications[J]. IEEE Transactions on Indu- strial Electronics, 2015, 62(10): 6085-6095.
[33] Herrera D, Villegas J, Galván E, et al. Synchronous reluctance six-phase motor proved based EV power- train as charger/discharger with redundant topology and ORS control[J]. IET Electric Power Applications, 2019, 13(11): 1857-1870.
[34] Credo A, Villani M, Fabri G, et al. Adoption of the synchronous reluctance motor in electric vehicles: a focus on the flux weakening capability[J]. IEEE Transactions on Transportation Electrification, 2022, 9(1): 805-818.
[35] Shi Chuan, Tang Yichao, Khaligh A. A single-phase integrated onboard battery charger using propulsion system for plug-in electric vehicles[J]. IEEE Transa- ctions on Vehicular Technology, 2017, 66(12): 10899-10910.
[36] Wang Zheng, Zhang Yue, You Shuai, et al. An integrated power conversion system for electric traction and V2G operation in electric vehicles with a small film capacitor[J]. IEEE Transactions on Power Electronics, 2020, 35(5): 5066-5077.
[37] Shi Chuan, Tang Yichao, Khaligh A. A three-phase integrated onboard charger for plug-In electric vehicles[J]. IEEE Transactions on Power Electronics, 2018, 33(6): 4716-4725.
[38] Gao Jialou, Jiang Dong, Sun Wei, et al. Zero torque three phase integrated on-board charger by multi- elements motor torque cancellation[C]//2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 2019: 563-568.
[39] De Sousa L, Silvestre B, Bouchez B. A combined multiphase electric drive and fast battery charger for Electric Vehicles[C]//2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 2011: 1-6.
[40] Subotic I, Bodo N, Levi E. Integration of six-phase EV drivetrains into battery charging process with direct grid connection[J]. IEEE Transactions on Energy Conversion, 2017, 32(3): 1012-1022.
[41] Abdel-Khalik A S, Massoud A, Ahmed S. Interior permanent magnet motor-based isolated on-board integrated battery charger for electric vehicles[J]. IET Electric Power Applications, 2018, 12(1): 124-134.
[42] Cheng He, Wang Wuhui, Liu Hailong, et al. Integrated multifunctional power converter for small electric vehicles[J]. Journal of Power Electronics, 2021, 21(11): 1633-1645.
[43] Chiang G T, Shuji T, Takahide S, et al. Coupled magnetic-based integrated isolated onboard battery charger and boost motor drive unit for electric vehicles[J]. IEEE Transactions on Transportation Electrification, 2022, 8(1): 135-148.
[44] Lacressonniere F, Cassoret B. Converter used as a battery charger and a motor speed controller in an industrial truck[C]//2005 European Conference on Power Electronics and Applications, Dresden, Germany, 2006: 1-7
[45] Haghbin S, Lundmark S, Alakula M, et al. An isolated high-power integrated charger in electrified-vehicle applications[J]. IEEE Transactions on Vehicular Technology, 2011, 60(9): 4115-4126.
[46] Haghbin S, Khan K, Zhao Shuang, et al. An integrated 20-kW motor drive and isolated battery charger for plug-in vehicles[J]. IEEE Transactions on Power Electronics, 2013, 28(8): 4013-4029.
[47] 李永恒, 刘陵顺. 基于九开关变换器的对称六相永磁同步电机集成车载驱动系统研究[J]. 电工技术学报, 2019, 34(增刊1): 30-38.
Li Yongheng, Liu Lingshun. The research of integrated vehicle drive system of symmetrical six- phase permanent magnet synchronous motor based on nine-switch converter[J]. Transactions of China Elec- trotechnical Society, 2019, 34(S1): 30-38.
[48] Raherimihaja H J, Zhang Qianfan, Na Tuopu, et al. A three-phase integrated battery charger for EVs based on six-phase open-end winding machine[J]. IEEE Transactions on Power Electronics, 2020, 35(11): 12122-12132.
[49] Diab M S, Elserougi A A, Abdel-Khalik A S, et al. A nine-switch-converter-based integrated motor drive and battery charger system for EVs using symmetrical six-phase machines[J]. IEEE Transactions on Indu- strial Electronics, 2016, 63(9): 5326-5335.
[50] Subotic I, Bodo N, Levi E. An EV drive-train with integrated fast charging capability[J]. IEEE Transa- ctions on Power Electronics, 2015, 31(2): 1461-1471.
[51] Subotic I, Bodo N, Levi E. Single-phase on-board integrated battery chargers for EVs based on multi- phase machines[J]. IEEE Transactions on Power Electronics, 2015, 31(9): 6511-6523.
[52] Subotic I, Bodo N, Levi E. Integration of six-phase EV drivetrains into battery charging process with direct grid connection[J]. IEEE Transactions on Energy Conversion, 2017, 32(3): 1012-1022.
[53] Wang Sitan, Lehn P W. A three-phase electric vehicle charger integrated with dual-inverter drive[J]. IEEE Transactions on Transportation Electrification, 2022, 8(1): 82-97.
[54] Cheng He, Zhang Dongbin, Liao Shuo, et al. Inte- grated drive converter of SDS-SRM with isolation and nonisolation charging capabilities for electric vehicle[J]. IEEE Transactions on Industrial Electro- nics, 2022, 69(9): 8679-8691.
[55] Cheng He, Wang Zelu, Yang Shiyang, et al. An integrated SRM powertrain topology for plug-In hybrid electric vehicles with multiple driving and onboard charging capabilities[J]. IEEE Transactions on Transportation Electrification, 2020, 6(2): 578- 591.
[56] Chen Jinchun, Wei Jiadan, Zhai Xiangyu, et al. The currents coordinative control strategy for integrated motor-drive and battery-charging system based on the split-field-winding DSEM in driving mode[J]. IEEE Transactions on Industrial Electronics, 2023, 70(5): 4505-4515.
[57] Zhang Xizheng, Wang Yaonan, Liu Guorong, et al. Robust regenerative charging control based on T-S fuzzy sliding-mode approach for advanced electric vehicle[J]. IEEE Transactions on Transportation Electrification, 2016, 2(1): 52-65.
[58] 宋清超, 陈家伟, 蔡坤城, 等. 多电飞机用燃料电池-蓄电池-超级电容混合供电系统的高可靠动态功率分配技术[J]. 电工技术学报, 2022, 37(2): 445- 458.
Song Qingchao, Chen Jiawei, Cai Kuncheng, et al. A highly reliable power allocation technology for the fuel cell-battery-supercapacitor hybrid power supply system of a more electric aircraft[J]. Transactions of China Electrotechnical Society, 2022, 37(2): 445-458.
[59] 袁佳歆, 曲锴, 郑先锋, 等. 高速铁路混合储能系统容量优化研究[J]. 电工技术学报, 2021, 36(19): 4161-4169, 4182.
Yuan Jiaxin, Qu Kai, Zheng Xianfeng, et al. Optimizing research on hybrid energy storage system of high speed railway[J]. Transactions of China Electrotechnical Society, 2021, 36(19): 4161-4169, 4182.
[60] 邓文丽, 戴朝华, 韩春白雪, 等. 计及再生制动能量回收和电能质量改善的铁路背靠背混合储能系统及其控制方法[J]. 中国电机工程学报, 2019, 39(10): 2914-2924.
Deng Wenli, Dai Chaohua, Han Chunbaixue, et al. Back-to-back hybrid energy storage system of electric railway and its control method considering regen- erative braking energy recovery and power quality improvement[J]. Proceedings of the CSEE, 2019, 39(10): 2914-2924.
[61] Shen Di, Lim C C, Shi Peng. Fuzzy model based control for energy management and optimization in fuel cell vehicles[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14674-14688.
[62] 耿安琪, 胡海涛, 张育维, 等. 基于阶梯能量管理的电气化铁路混合储能系统控制策略[J]. 电工技术学报, 2021, 36(23): 4916-4925.
Geng Anqi, Hu Haitao, Zhang Yuwei, et al. Control strategy of hybrid energy storage system for elec- trified railway based on increment energy mana- gement[J]. Transactions of China Electrotechnical Society, 2021, 36(23): 4916-4925.
[63] 周美兰, 冯继峰, 张宇, 等. 纯电动客车复合储能系统功率分配控制策略研究[J]. 电工技术学报, 2019, 34(23): 5001-5013.
Zhou Meilan, Feng Jifeng, Zhang Yu, et al. Research on power allocation control strategy for compound electric energy storage system of pure electric bus[J]. Transactions of China Electrotechnical Society, 2019, 34(23): 5001-5013.
[64] Shen Junyi, Khaligh A. A supervisory energy mana- gement control strategy in a battery/ultracapacitor hybrid energy storage system[J]. IEEE Transactions on Transportation Electrification, 2015, 1(3): 223- 231.
[65] Pando-Acedo J, Milanés-Montero M I, Romero- Cadaval E, et al. Improved three-phase integrated charger converter connected to single-phase grid with torque cancellation[J]. IEEE Access, 2021, 9: 108266- 108275.
[66] Ali S Q, Mascarella D, Joos G, et al. Torque cancelation of integrated battery charger based on six-phase permanent magnet synchronous motor drives for electric vehicles[J]. IEEE Transactions on Transportation Electrification, 2018, 4(2): 344-354.
[67] Tong Minghao, Cheng Ming, Hua Wei, et al. A single-phase on-board two-stage integrated battery charger for EVs based on a five-phase hybrid- excitation flux-switching machine[J]. IEEE Transa- ctions on Vehicular Technology, 2020, 69(4): 3793- 3804.
[68] Xiao Yang, Liu Chunhua, Yu Feng. An effective charging-torque elimination method for six-phase integrated on-board EV chargers[J]. IEEE Transa- ctions on Power Electronics, 2020, 35(3): 2776-2786.
[69] 蒋栋, 高加楼, 李柏杨, 等. 电动汽车电机驱动系统零转矩充电复用技术简介[J]. 电工技术学报, 2022, 37(19): 4862-4871.
Jiang Dong, Gao Jialou, Li Boyang, et al. Introduction of integrated motor drive-charger technologies for electric vehicle with zero torque[J]. Transactions of China Electrotechnical Society, 2022, 37(19): 4862- 4871.
[70] He Shaomin, Xu Zhiwei, Chen Min, et al. General derivation law with torque-free achieving of integral on-board charger on compact powertrains[J]. IEEE Transactions on Industrial Electronics, 2021, 68(2): 1791-1802.
Abstract As a clean energy transportation, electric vehicles have attracted more and more attention due to their mature technology and low cost. However, the ability to charge the on-board power supply easily and efficiently has become a key factor limiting the industrialization of electric vehicles. Currently, AC slow- charging on-board charging system is considered as an effective solution to alleviate the charging problem of electric vehicles.
The on-board charging system can make electric vehicles less dependent on charging posts and more convenient to charge. However, traditional drive and charging systems operate independently, which undoubtedly causes an increase in the size and weight of electric vehicles and limits the charging capacity. Therefore, the drive-charging integrated topology has been proposed to improve the utilization of on-board devices and effectively reduce costs.
At present, the proposed drive-charging integrated systems vary in terms of their on-board charging system performance. Based on the existing studies, the drive-charging integrated topologies proposed in literatures have been sorted out, classified, and summarized according to different applications. It can be found that voltage matching, fast energy matching, electrical isolation, and rotor vibration noise in charging mode are still the key technical issues that need to be solved. The control strategies used to optimize the system performance in different operation modes are reviewed.
The research on drive-charging integrated systems is one of the main trends to increase the power density of electric vehicles. There are still many problems. As a major research hotspot in the future, the following aspects related to the drive-charging integrated system should be considered:
(1) Minimizing the number of accessory components and simplifying the topology are essential for achieving portability and cost-effectiveness, thereby reducing manufacturing costs and enhancing system reliability by mitigating equipment failures and losses caused by switching devices.
(2) To better deal with the problem of matching the voltage between the on-board battery and the DC bus, a two-stage topology needs to be constructed. Tapping into new motor structure designs with two independent windings will be a continuous development research direction.
(3) In-depth studies are required to improve the system reliability in charging mode and to address issues of energy conversion efficiency and losses in the electrical isolation section.
(4) The current flowing through the motor winding during the charging mode can produce electromagnetic torque. The motor winding multiplexed as a charging inductor using current equalization control and multiplexed as a resolver to reduce motor vibration noise will be a hot spot for future research.
(5) For motoring and braking modes, the studies on real-time tracking of load energy, energy detection of energy storage elements, and dynamic energy distribution of hybrid power systems are conducted to improve energy utilization efficiency. In the charging and V2G modes, control optimization based on the charging and discharging efficiency of the hybrid power system and auxiliary power quality regulation of the grid are required. In addition, adopting a multi-objective optimal control strategy to achieve optimal energy utilization efficiency of the power system in a complete operating cycle will become a major focus in integrated system research.
Keywords:Drive-charging system, integrated topology, electric vehicles, control strategy
王晓姬 女,1996年生,博士研究生,研究方向为电动汽车驱动充电一体化系统。E-mail: wangxiaoji@mail.sdu.edu.cn
王道涵 男,1980年生,教授,博士生导师,研究方向为新能源汽车驱动系统设计与控制。E-mail: dhwang@sdu.edu.cn(通信作者)
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.230583
国家自然科学基金项目(51977125)和深圳市科技计划项目(JCYJ20210324141409023, JCYJ20220530141007017)资助。
收稿日期 2023-05-01
改稿日期 2023-05-19
(编辑 崔文静)