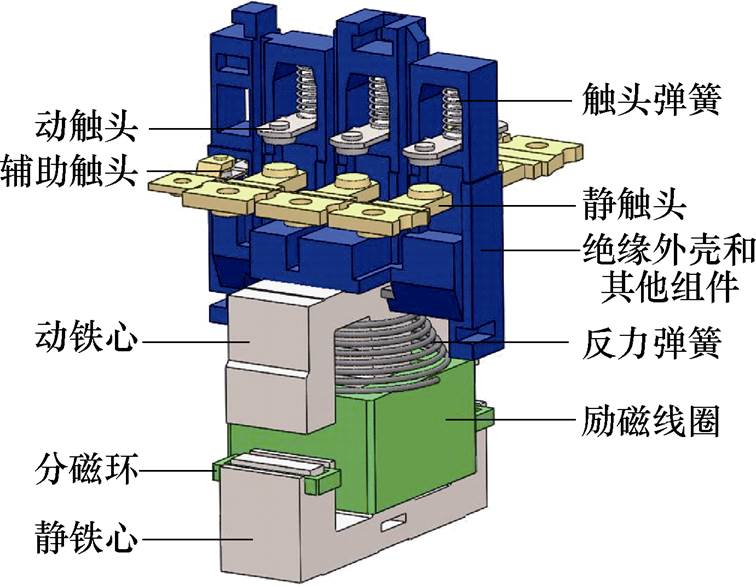
图1 交流接触器结构
Fig.1 Structure of AC contactor
摘要 交流接触器的吸持大多通过单一控制线圈电流或电压实现,因此无法兼顾可靠吸持和节能运行的要求,该文对交流接触器不可靠吸持特性进行理论分析、建模仿真和实验测试,得到动、静铁心分离过程中线圈感应电动势的变化规律,并以此为基础,提出一种基于多反馈参量的交流接触器自适应吸持控制策略。以交流接触器正常运行中的触头电流、线圈电流以及不可靠吸持发生时线圈的感应电动势为反馈参量,通过对参量的监测并根据不同的工作状态输出相应的控制信号,使接触器即使处于较低的吸持电压下,依然具备较高的吸持稳定性。基于该策略,设计了控制模块并进行实验验证。结果表明,利用该控制策略可以有效实现接触器的节能运行与可靠吸持,减小吸持能耗并提高交流接触器的工作稳定性。
关键词:交流接触器 多反馈参量 自适应吸持控制 感应电动势
交流接触器是一种用于频繁接通和断开交流主电路和大容量控制电路的电器,直接影响低压配电系统、自动控制系统的运行可靠性[1-2]。随着交流接触器的大量使用,能耗成了不容忽视的问题[3-4]。相较于吸合时动、静触头间的接触电阻引起的能耗和毫秒级起动阶段的线圈能耗,线圈的吸持能耗成了最主要的来源,如何兼顾可靠吸持与节能保持成了吸持过程控制的研究重点。
为了实现交流接触器的节能运行,目前较为常见的有以线圈电压为控制量的直流低电压保持方式和以线圈电流为控制量的直流低电流保持方式。低电压保持控制策略通过线圈双电源切换供电,在起动时线圈采用高电压励磁,保持过程则切换为低电压电源供电,可有效地减小吸持能耗[5-7]。然而温升问题普遍存在于长时间通电以及工作在各种复杂环境的接触器中,线圈电阻不可避免地增大,倘若采用恒定的线圈电压控制方式,将不能保证接触器工作的可靠性。低电流保持控制方式采用单一电源进行供电,以线圈电流作为控制参量,可分为开环和闭环两种控制方式,具体表现为占空比是否恒定。开环控制采用恒定高占空比励磁起动,恒定低占空比进行保持,忽略线圈电阻的影响,因此控制的有效性同样受到温升的制约。而带线圈电流反馈的闭环控制方式通过实时控制线圈电压的占空比,使线圈电流保持在恒定值,可以有效避免温升引发的不可靠吸持问题[8-10]。为了保证可靠吸持,闭环控制方式通常采用临界吸持电流的数倍作为吸持电流参考值[11]。这将造成额外的能耗,无法实现真正意义的节能运行。而在过低的保持电流控制方式下动、静触头间的电动斥力可能导致接触器不可靠吸持[12-14],此外,为了维持恒定的吸持电流,线圈励磁回路的开关电子器件需要不停地通断,将带来附加的开关损耗。由于上述两种方式均采用固定的保持电压或电流参考值,导致其适应性不强。因此,本文以减少能耗为出发点,提出一种基于多反馈参量的自适应吸持控制策略。通过实时监测触头电流、线圈电流、线圈感应电动势,自适应地调整吸持电压,保证了接触器即使处于较低的吸持电压下,依然具备较高的吸持稳定性。
为减小吸持能耗,吸持电压或吸持电流参考值须尽可能低,且应具备自适应调节功能,以确保控制的有效性不受交流接触器老化、机构特性改变的影响,因此,反馈参量的选定、检测及判断显得尤为重要。文献[15]在交流接触器励磁线圈上外绕一个辅助线圈,分析了分断过程中动、静铁心分离与辅助线圈感应电动势之间存在一定的关系。因此,本文通过理论推导、仿真以及实验,对不可靠吸持发生时感应电动势的变化规律进行分析,为将感应电动势作为不可靠吸持事件的反馈信号提供基础。
本文以某型号的交流接触器为研究对象,结构示意图如图1所示。该交流接触器主要由电磁机构(包括反力弹簧、励磁线圈、静铁心、分磁环、动铁心),触头系统(包括触头弹簧、静触头、动触头和辅助触头)、绝缘外壳以及其他附件组成。
图1 交流接触器结构
Fig.1 Structure of AC contactor
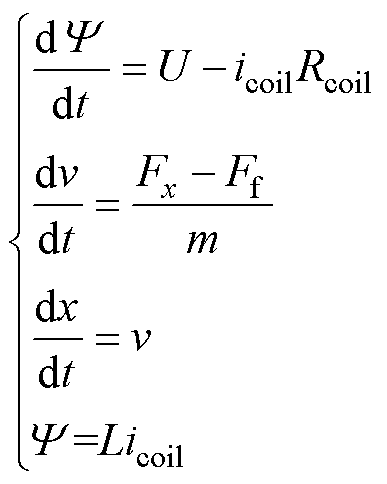
电磁机构动态过程包含电、磁、机械参量的变化,其动态特性可用动态方程组描述为
 (1)
(1)
式中, 为磁路中磁链;U为励磁电压;icoil为线圈电流;Rcoil为线圈电阻;v为铁心运动速度;t为时间;Fx为电磁吸力;Ff为电磁系统反力;m为电磁系统运动部件质量;x为铁心位移;L为磁路电感。
为磁路中磁链;U为励磁电压;icoil为线圈电流;Rcoil为线圈电阻;v为铁心运动速度;t为时间;Fx为电磁吸力;Ff为电磁系统反力;m为电磁系统运动部件质量;x为铁心位移;L为磁路电感。
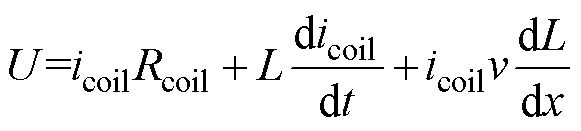
吸合过程中,随着铁心的运动,将产生运动反电动势icoilvdL/dx,此时电磁机构磁路电压平衡方程式为
 (2)
(2)
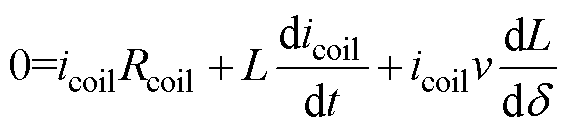
为了产生不可靠吸持事件,将线圈励磁电压设为0V,则不可靠吸持发生过程中的电压平衡方程可表示为
 (3)
(3)
式中,d 为动、静铁心之间的气隙。在动、静铁心分离初期,气隙非常小,忽略漏磁,则磁路电感可表示为
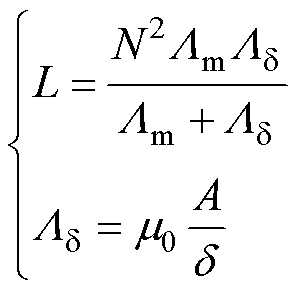 (4)
(4)
式中,N为励磁线圈匝数; 为铁心磁导;
为铁心磁导; 为气隙磁导;A为铁心截面面积;
为气隙磁导;A为铁心截面面积; 为空气磁导率。将式(4)代入式(3),整理后可得
为空气磁导率。将式(4)代入式(3),整理后可得
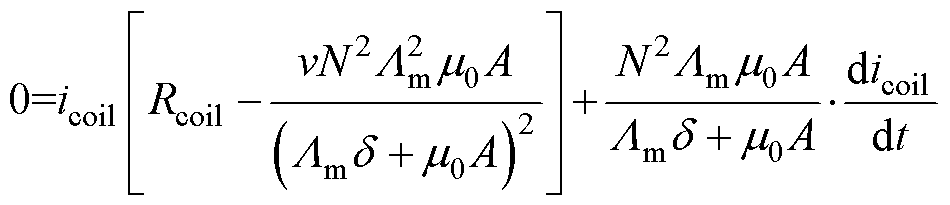 (5)
(5)
求解上述方程得到icoil的通解为
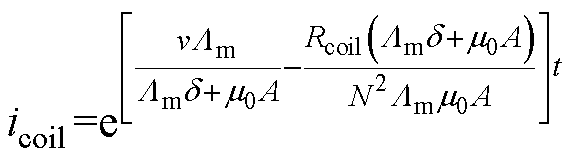 (6)
(6)
由于接触器励磁线圈与辅助线圈套在同一铁心极柱上,近似于同心变压器,可得
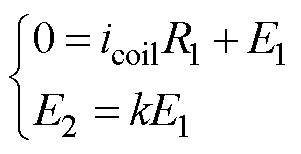 (7)
(7)
式中,R1为励磁线圈绕组漏阻;E1为励磁线圈感应电动势;E2为辅助线圈感应电动势(下称感应电动势);k为辅助线圈与励磁线圈的匝数比。联立式(5)~式(7)可得
 (8)
(8)
由于icoil为e的指数函数,恒大于零,即icoil>0,因此,E2<0,即感应电动势在动、静铁心分离期间应为负电动势。
为了验证理论推导的准确性,建立Simulink与Flux的联合仿真模型,对接触器的吸持过程进行仿真分析。图2为具有双层线圈的接触器电磁机构模型,其中辅助线圈套在励磁线圈外,用于感应电动势的检测。联合仿真过程另文叙述。
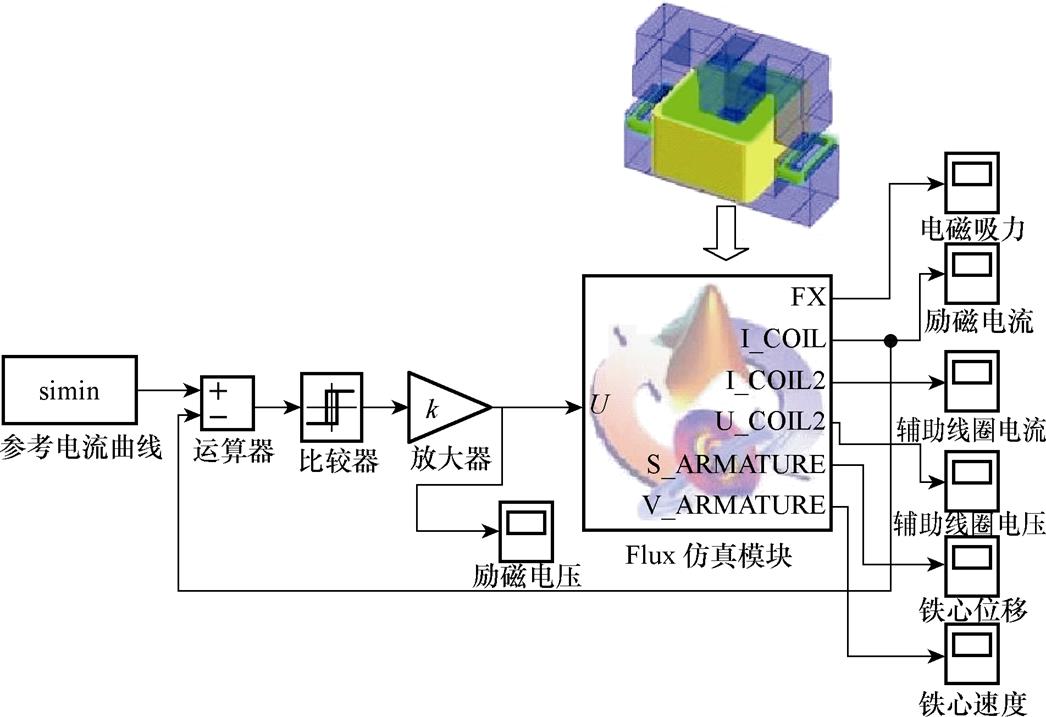
图2 联合仿真原理
Fig.2 Schematic diagram of joint simulation
为了研究不可靠吸持发生时接触器各参量变化情况,在铁心吸持阶段,使接触器线圈断电,触发不可靠吸持事件。由于仿真过程计算量大,迭代时间冗长,因此,本文对仿真模型和控制方式进行一定的简化,对接触器采用带线圈电流反馈的闭环控制方式起动并稳定吸持一段时间后,在50ms时刻使线圈断电。仿真结果如图3所示,图3中包含了接触器起动和吸持过程的接触器的动态特性。图中从上到下依次为线圈电压、线圈电流、线圈感应电动势以及铁心位移曲线。
如图3所示,动、静铁心在t1时刻分离,在反力弹簧的作用下,在t2时刻动铁心返回最大工作气隙处。在这个过程中,线圈电流先增大后减小,而感应电动势存在反向增大而后减小的趋势。
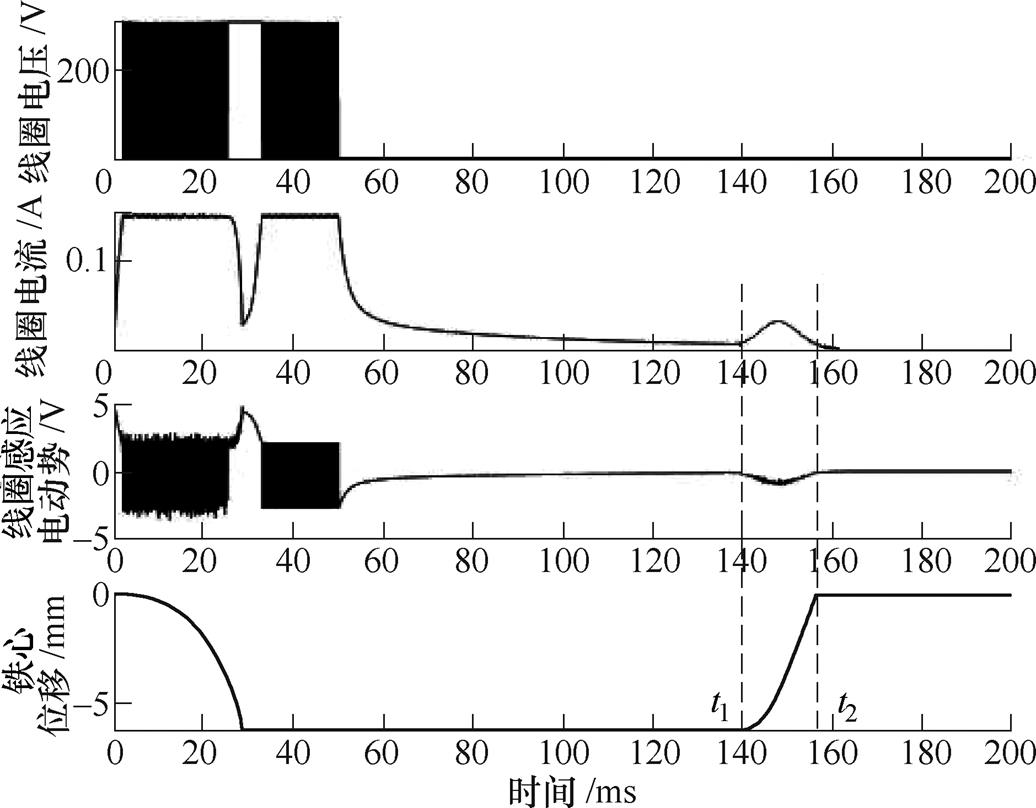
图3 仿真结果
Fig.3 Simulation results
从线圈开始断电到铁心分离前,由于铁心速度为零,此时电磁机构的磁路电压平衡方程为
 (9)
(9)
线圈断电后,电流呈下降趋势,当线圈电流自由衰减到不足以维持接触器吸持时,铁心开始分离,线圈中产生阻碍电流减小的运动反电动势icoilvdL/dd,此时电磁机构的磁路电压平衡方程如式(3)所示。由于铁心分离过程电感变化率dL/dd 为负,其运动反电动势也为负,铁心刚开始分离时由于线圈电流较小,icoilRcoil不足以平衡运动反电动势,故运动反电动势出现后便占据主要地位,迫使线圈电流上升,因此t1时刻线圈电流出现拐点,电流变化率dicoil/dt> 0。随着电流上升,icoilRcoil与Ldicoil/dt不断增大,直到运动反电动势不足以维持电流的上升,电流达到最大值,随后开始下降。根据式(8),电流的变化过程将会导致辅助线圈产生一个先反向增大而后减小的负感应电动势。
为了验证感应电动势的变化规律,在某型号的交流接触器线圈外加绕一个辅助线圈,以测试感应电动势;采用位移传感器测得动铁心的位移曲线;在触头上串联一个电阻并为触头回路施加一个5V的直流电压,测得触头动作信号。图4为线圈感应电动势变化规律。
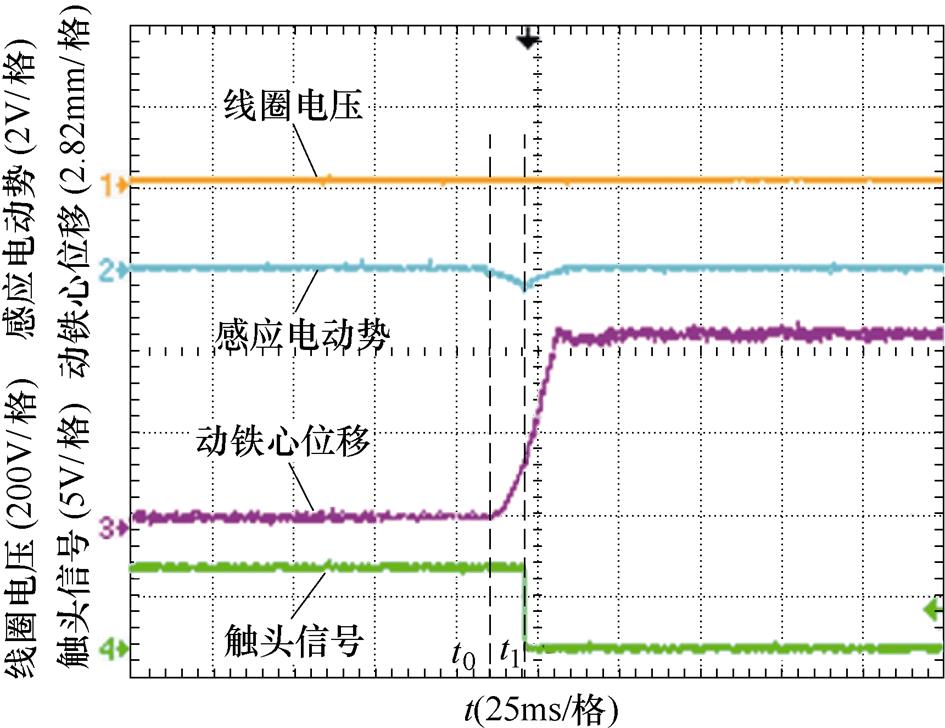
图4 线圈感应电动势变化规律
Fig.4 Variation law of induced EMF of the coil
图4中四条曲线从上到下依次为线圈电压、线圈感应电动势、动铁心位移曲线、触头信号(高电平为触头闭合,低电平为断开)。t0时刻动、静铁心分离,此时辅助线圈两端出现负的感应电动势,随后感应电动势逐渐增大;t1时刻铁心走完接触器超程,触头随之分断,动铁心继续运动直到最大行程处。从图4中可见,从感应电动势出现到触头分断的时间间隔达10ms以上,在这段时间内足以对接触器进行二次控制。
为满足交流接触器以闭环控制方式起动和自适应吸持的需要,本文设计了接触器线圈控制拓扑电路,如图5所示。图中VS为交流电源;V2为保持阶段的数控直流电压源,可以为线圈提供可调节的保持电压;VD3、VD4、VD6、VD7组成整流电路;C1为滤波电容;Q1、Q2、Q3为场效应开关管,可快速通断回路。由于续流回路的存在,导致分断过程中线圈电流变化缓慢,机构释放时间长,因此选择续流回路可控的设计方案,在释放过程中关断Q2,以加快机构的释放;VD1、VD2、VD5为快恢复二极管,可以防止VS和V2所在的支路同时导通,避免短路。
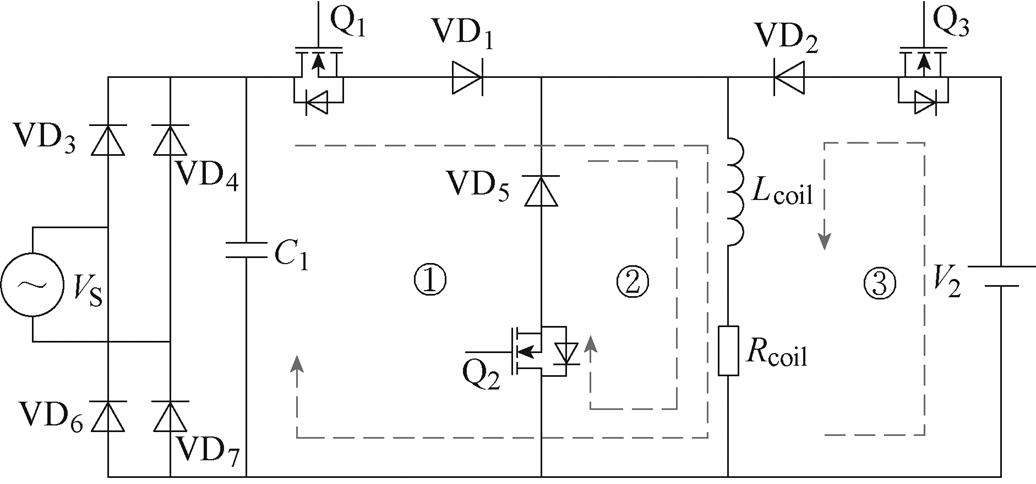
图5 线圈控制拓扑电路
Fig.5 Topology circuit of the coil control
该电路具有三种工作模态:①当Q1导通、Q3截止时,线圈由VS供电,实现高电压励磁;②当Q1、Q3截止时,由于线圈近似于一个电感,线圈电流不能突变,此时Q2、VD5将作为线圈的续流回路;③当Q1截止、Q3导通时,线圈由V2供电,处于低电压保持状态。这三种工作模态对应的电流流向轨迹如图5中虚线所示。
为了满足吸持电压值可调的要求,本文设计了如图6所示的数控开关电源降压斩波电路。该电路以TI公司的同步降压控制器LM5117为核心,通过单片机改变数字电位器MCP41010的电阻值,实现电源输出电压可调。
在接触器吸持过程中,影响吸持稳定性的因素分为内部因素和外部因素。内部因素包括线圈长期通电以及环境温度升高引发的线圈电阻增大,导致线圈吸持电流减小,无法维持正常的吸持过程;还包括由于触头系统通过的电流过大导致触头间电动斥力而引发的不可靠吸持。外部因素为接触器运行于恶劣环境下,如:使接触器振动引发的不可靠吸持。通过电流传感器检测线圈电流和触头电流可判定当前是否可能发生不可靠吸持现象。而从本文第1节对感应电动势的仿真与实验可知,感应电动势的出现几乎与不可靠吸持事件的发生同步,且感应电动势出现到触头分断的时间间隔较长,可以对接触器进行二次控制。因此,本文将线圈电流、触头电流以及线圈感应电动势作为反馈参量,利用数控开关电源输出可调的特点,自适应调整吸持电压,保证了接触器即使处于较低的吸持电压下,依然具备较高的吸持稳定性,其控制系统框图如图7所示。
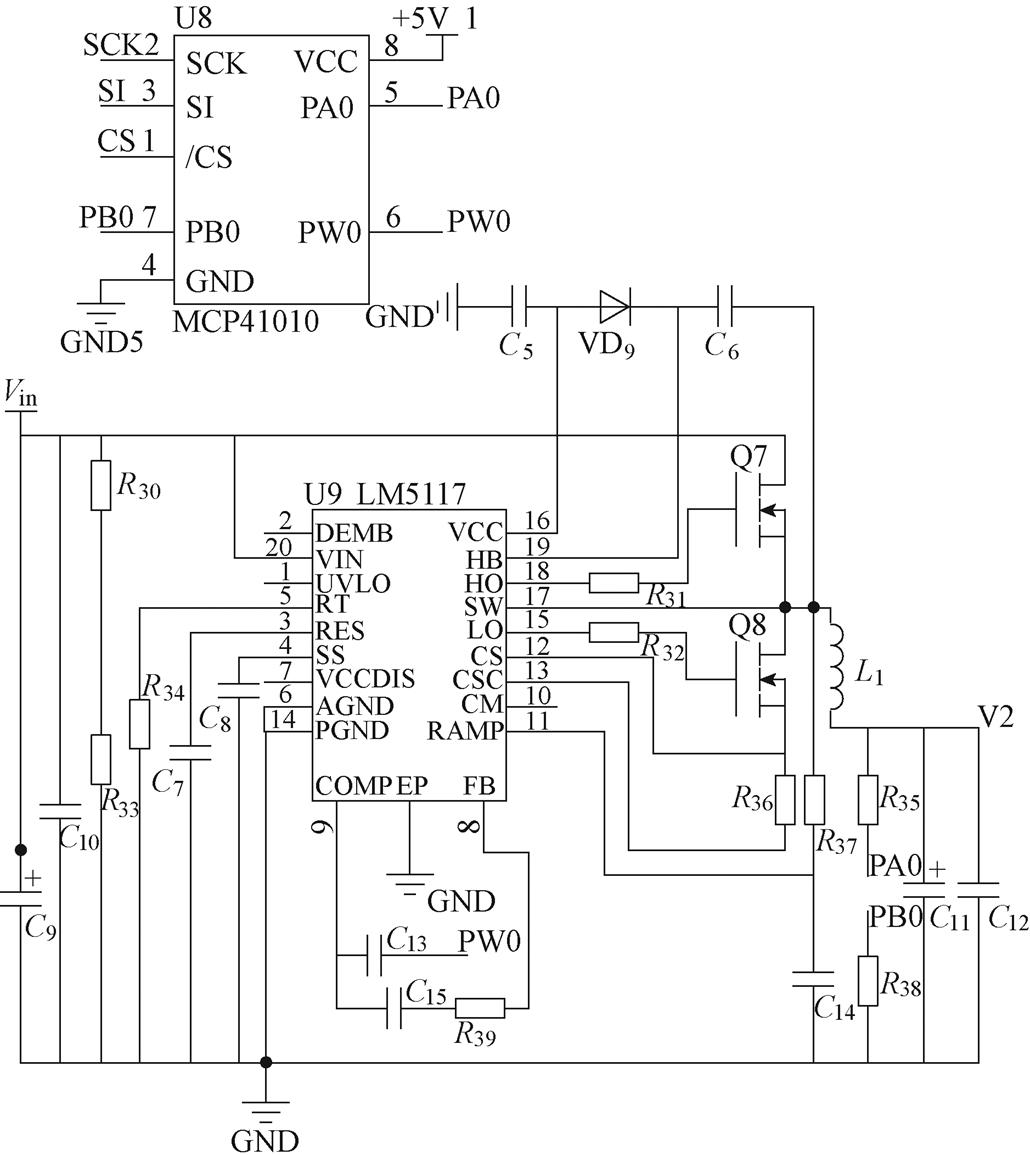
图6 数控开关电源降压斩波电路
Fig.6 Buck chopper circuit of numerical control switching power supply
吸持电压设定值Ur由吸持电压设定值基础分量Ur1与吸持电压设定值叠加分量Ur2、Ur3共同 决定。
在吸合过程完成后,线圈并不会马上切换为低电压保持,而是再持续一小段时间的强励磁,在这段时间内,单片机将完成对触头电流Icontact的检测,并根据一定的触头电流梯度In设定对应的初始吸持电压参考值Ur1,即
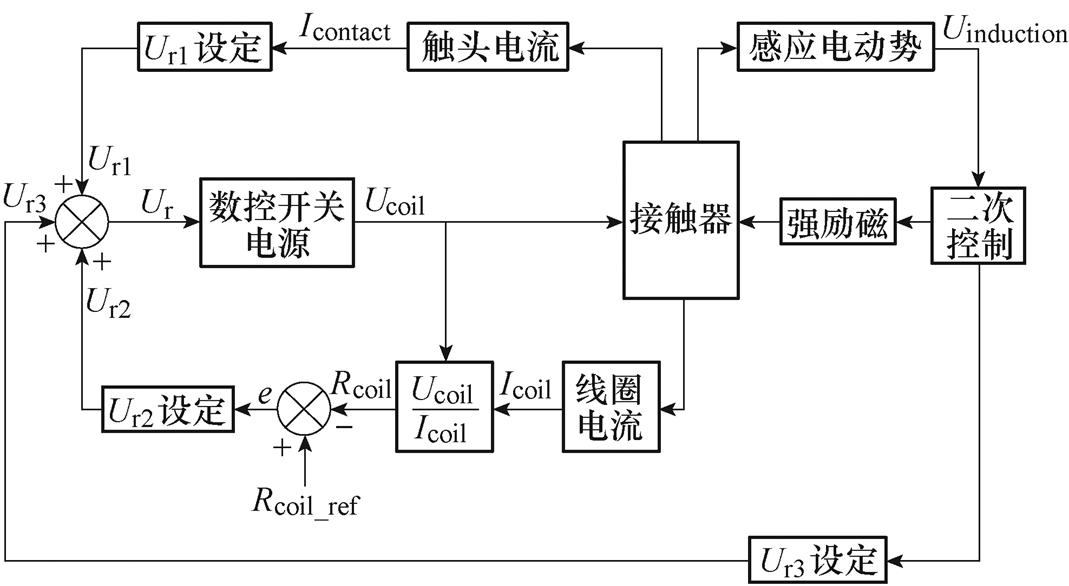
图7 多反馈参量自适应吸持控制系统框图
Fig.7 Block diagram of adaptive holding control system based on multiple feedback parameter
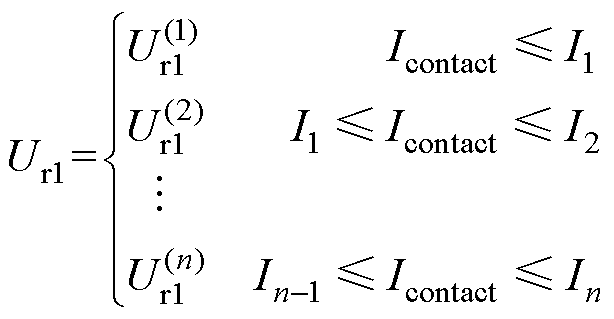 (10)
(10)
此时有
 (11)
(11)
即初始吸持电压完全由Ur1决定。强励磁过程结束后,系统将开启对线圈电流以及感应电动势的检测,此后保持对这三个反馈量的实时监测,直至吸持过程结束。
基于线圈电流反馈的控制策略实质是对线圈电阻的实时计算,通过单片机将采集得到的线圈电压Ucoil与线圈电流Icoil计算实际线圈电阻Rcoil,并与常温下线圈电阻Rcoil_ref进行比较,即
 (12)
(12)
当接触器由于长期工作或外部温升等原因导致线圈电阻变大时,若e值超过了线圈电阻变化阈值,此时系统将在原有的吸持电压设定值上叠加分量Ur2,Ur2的设定方法与Ur1相似,此时有
 (13)
(13)
即此时的吸持电压将由Ur1与Ur2共同决定。
以上两种参量的设定值皆是出于接触器本体在正常情况下的考虑。当接触器发生老化、机构特性改变,或是接触器在某一时刻由于外部振动或触头电流瞬时急剧增大导致基于触头电流反馈控制来不及反应时,可能引发不可靠吸持问题。若此时铁心被斥开,线圈将有感应电动势出现。在感应电动势达到一定阈值后被单片机所识别,此时系统将对接触器进行二次控制,对线圈采取强励磁措施,使动铁心在走完超程前重新被吸上(可以保证在这个过程中触头依然处于闭合状态),随后系统将在原有的吸持电压设定值上增加叠加分量Ur3,则此时的吸持电压将由Ur1、Ur2与Ur3共同决定,即有
 (14)
(14)
虽然基于感应电动势的自适应吸持控制可以有效避免所有可能导致接触器误动作的因素,但在控制中为了使铁心分离后再次吸合需要较大的励磁电流,将造成额外的能耗。而在大部分情况下,触头电流以及线圈温升为缓慢变化过程,将触头电流以及线圈电流作为基本反馈参量,自适应调节吸持电压,可避免基于感应电动势的自适应控制的触发次数,减少强励磁的能耗,通过将初始保持电压设定在一个较低的值,降低接触器运行过程中的能耗,兼顾了接触器节能运行与可靠吸持,并大幅度提升接触器在不同工作环境下的适应能力。
为了验证该自适应吸持控制策略的可行性,本文设计了控制模块,并进行实验验证。
如上文所述,由于初始保持电压设定值较低,交流接触器过载时触头间所产生电动斥力可能引发接触器误动作。实验模拟触头电流突然变大和恢复常态,验证基于触头电流反馈的自适应吸持控制策略有效性。基于触头电流的自适应吸持实验结果如图8所示。
由图8a可见,常态下触头电流为5A,在t0时刻主回路并入同样大小的负载,主回路电流增大至10A,单片机检测到触头电流增大后,在t1时刻输出信号,随后线圈电压逐渐上升。图8b为触头电流在t2时刻从非常态(10A)恢复为常态(5A),经过一段时间后,在t3时刻线圈吸持电压将缓慢恢复原来的吸持电压值,可避免误检测以及触头电流短暂性恢复常态又转为非常态。
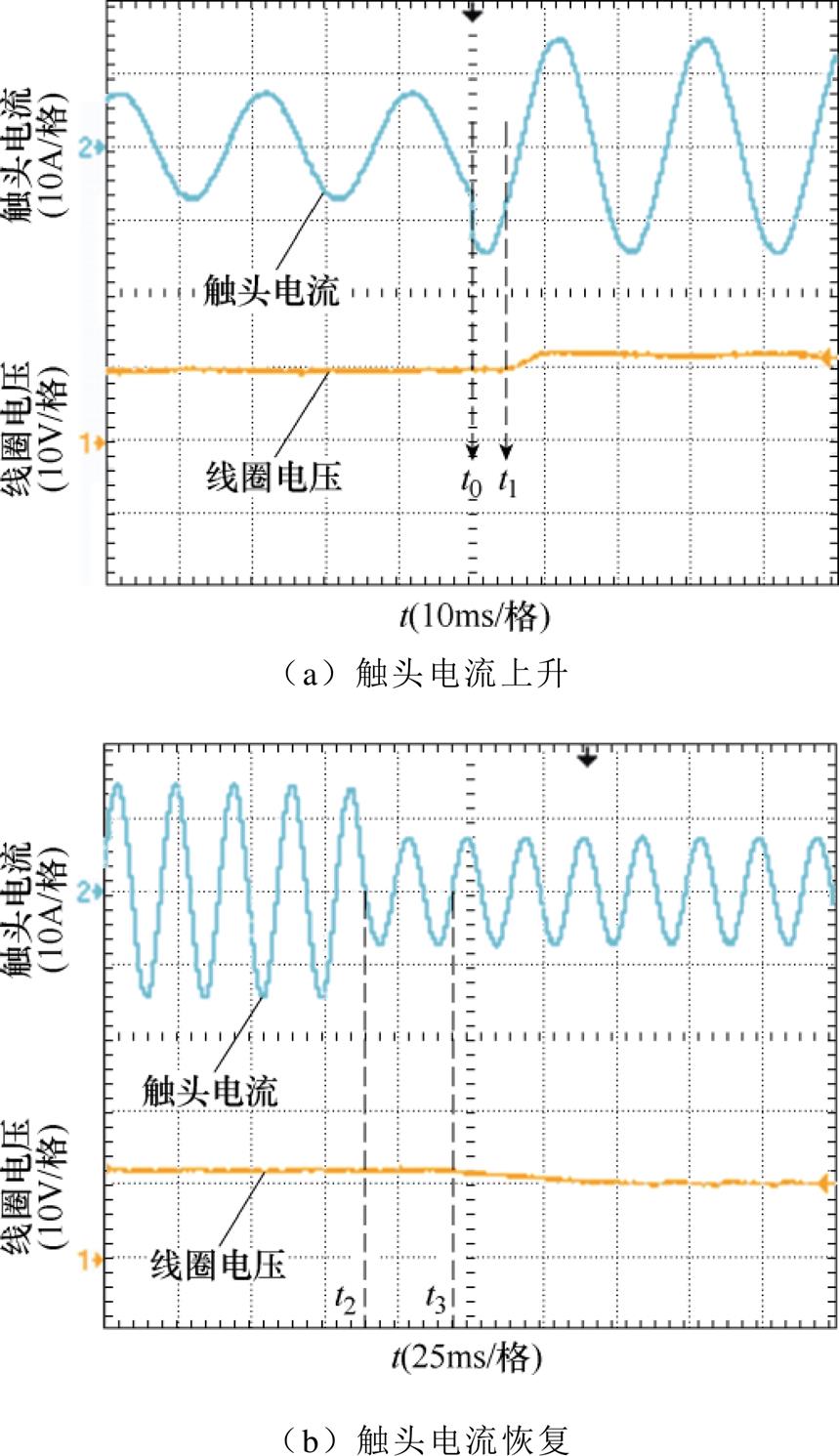
图8 基于触头电流的自适应吸持实验结果
Fig.8 Experimental results of adaptive holding based on contact current
线圈电流作为影响电磁吸力的重要物理量,其波动将影响接触器吸持过程的稳定性。线圈长时间通电或者周围环境温度升高将不可避免地导致线圈电阻增大,线圈电流随之减小,此时基于触头电流的吸持电压设定值将无法保证接触器吸持的可靠性。将线圈电流作为反馈参量,由单片机进行采集并调整输出电压,实现自适应调整。
为模拟线圈电阻增大引发的不可靠吸持问题,对交流接触器进行模拟实验,在某时刻为线圈回路串入一个阻值为10%左右线圈电阻的电阻,验证自适应吸持控制的有效性。基于线圈电流的自适应吸持实验结果如图9所示。
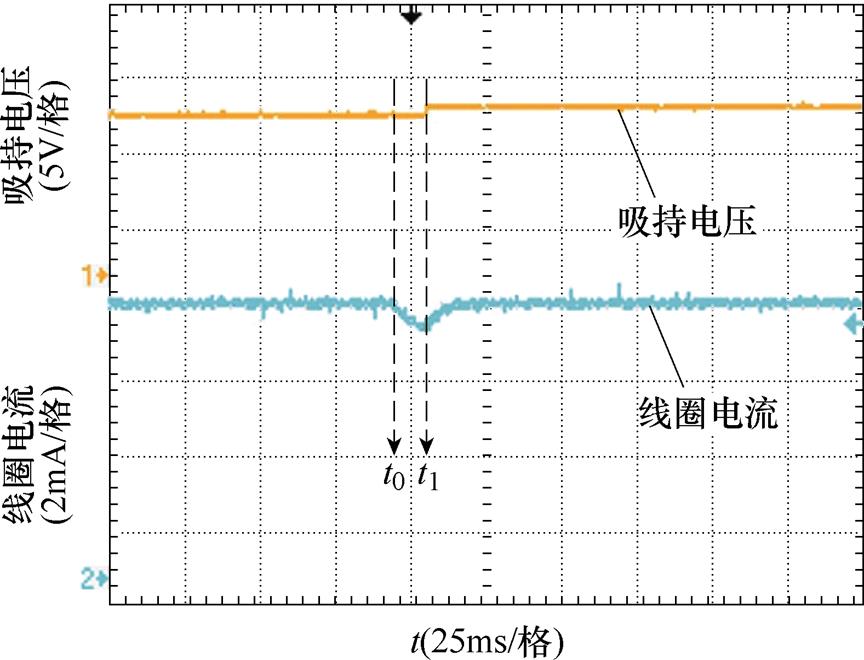
图9 基于线圈电流的自适应吸持实验结果
Fig.9 Experimental results of adaptive holding based on coil current
从图9中可见,在t0时刻线圈回路串入电阻,由于线圈近似于一个储能电感,因此线圈电流并不会马上跌落,而是缓慢下降,在t1时刻线圈电流达到触发阈值,随后单片机输出信号,使保持电源输出电压上升,线圈电流随之上升,完成自适应调整过程。
为验证该控制策略的有效性,在强励磁后为接触器设置一个较低的保持电压,使其无法可靠吸持,通过自适应吸持控制后,接触器可靠保持,实验波形如图10所示。
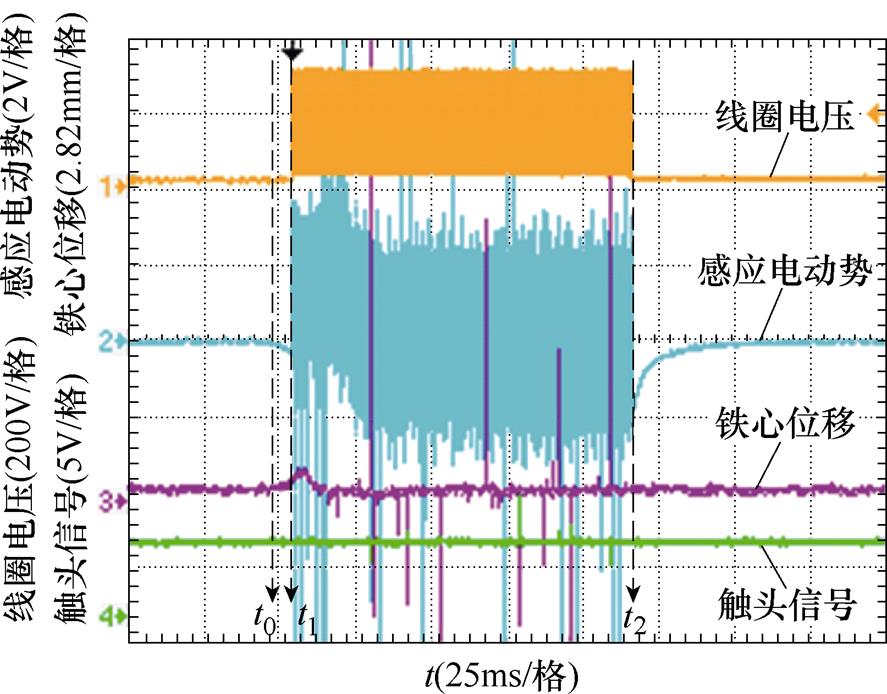
图10 基于线圈感应电动势的自适应吸持实验结果
Fig.10 Experimental results of adaptive holding based on coil induced EMF
t0时刻,线圈电流不足以维持保持状态,动、静铁心分离,线圈出现感应电动势;单片机检测到感应电动势后,在t1时刻对线圈进行强励磁,铁心重新吸合,强励磁结束后,在t2时刻提高保持电压,防止铁心再次斥开。从图10中铁心位移曲线和触头信号波形可以看到,铁心在分离一段距离后被再次吸上,在这个过程中触头始终保持闭合状态,说明了控制的有效性。在t1~t2之间由于线圈强励磁导致感应电动势出现高频信号,为了避免感应电动势反馈控制的误触发,将在强励磁过程中关闭对感应电动势的检测。
本文以减小交流接触器吸持能耗为出发点,同时考虑了交流接触器的可靠运行,提出了一种多反馈参量自适应吸持控制策略,通过实时监测触头电流、线圈电流以及线圈感应电动势,使接触器处于一个较低的吸持电压下,可以最大程度地减小接触器的能耗,并同时具备较高的吸持稳定性。设计了控制模块并进行实验,验证了该控制策略的可行性。结果表明,该控制模块可以有效实现以下功能:
1)当触头电流发生变化时,吸持电压可以根据触头电流变化幅值做出反应,说明该控制策略可以有效防止过载可能引发的接触器不可靠吸持。
2)当线圈电流下降到一定阈值时,使保持电源的输出电压上升,保证了交流接触器在线圈长期通电以及环境温度升高导致线圈发热时,仍可以可靠运行。
3)当接触器发生老化、机构特性改变,或是由于外部振动及其他突发情况导致的接触器不可靠吸持事件发生时,该多反馈参量自适应吸持控制策略将基于感应电动势对接触器进行二次控制,有效防止动、静触头分离,保证主回路的正常工作。
参考文献
[1] 李奎, 张国盼, 郑淑梅, 等. 基于实时服役参数的交流接触器电寿命最大化控制策略[J]. 电工技术学报, 2021, 36(9): 1976-1985.
Li Kui, Zhang Guopan, Zheng Shumei, et al. A control strategy for maximizing the electrical life of AC contactors based on real-time operating para- meters[J]. Transactions of China Electrotechnical Society, 2021, 36(9): 1976-1985.
[2] 游颖敏, 王景芹, 舒亮, 等. 基于音频特征的交流接触器电寿命预测方法[J]. 电工技术学报, 2021, 36(9): 1986-1998.
You Yingmin, Wang Jingqin, Shu Liang, et al. The method of electrical life prediction considering the audio characteristics of AC contactor[J]. Transactions of China Electrotechnical Society, 2021, 36(9): 1986- 1998.
[3] 赵升, 舒亮, 吴自然, 等. 电磁-永磁复合型接触器数值仿真与控制方法[J]. 电工技术学报, 2020, 35(5): 1083-1092.
Zhao Sheng, Shu Liang, Wu Ziran, et al. Numerical simulation and control method of electromagnetic- permanent composite contactor[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 1083- 1092.
[4] 李立志, 史仍辉, 李杰正. 交流接触器磁保吸双线圈电磁驱动器的研究[J]. 电工技术学报, 2014, 29(增刊1): 145-148.
Li Lizhi, Shi Renghui, Li Jiezheng. Research on two-coil magnetic latching electromagnetic actuator for AC contactor[J]. Transactions of China Electro- technical Society, 2014, 29(S1): 145-148.
[5] 陈德为, 张培铭. 基于人工鱼群算法的智能交流接触器虚拟样机优化设计[J]. 电工技术学报, 2011, 26(2): 101-107.
Chen Dewei, Zhang Peiming. Virtual prototype optimal design of intelligent AC contactors based on artificial fish-swarm algorithm[J]. Transactions of China Electrotechnical Society, 2011, 26(2): 101-107.
[6] Bai Yongjiang, Yang Xu, Zhang Dan, et al. Con- ducted EMI mitigation schemes in isolated switching- mode power supply without the need of a Y- capacitor[J]. IEEE Transactions on Power Electronics, 2017, 32(4): 2687-2703.
[7] 苏晶晶, 许志红. 新型抗晃电的接触器智能控制器[J]. 低压电器, 2011(23): 12-17.
Su Jingjing, Xu Zhihong. New intelligent controller for anti-voltage sag[J]. Low Voltage Apparatus, 2011(23): 12-17.
[8] 罗海海, 许志红. 组合式开关智能分相控制技术的研究[J]. 电器与能效管理技术, 2016(1): 14-21.
Luo Haihai, Xu Zhihong. Research on intelligent individual-phase control technology for combined- switches[J]. Electrical & Energy Management Tech- nology, 2016(1): 14-21.
[9] 庄杰榕, 许志红. 基于升压斩波级联方式的接触器控制模块设计[J]. 中国电机工程学报, 2016, 36(15): 4281-4290.
Zhuang Jierong, Xu Zhihong. Design of the contactor control module based on the cascade boost-chopper[J]. Proceedings of the CSEE, 2016, 36(15): 4281-4290.
[10] 许志红, 汤龙飞. 智能交流接触器一体化仿真及数字控制技术[J]. 中国电机工程学报, 2015, 35(11): 2870-2878.
Xu Zhihong, Tang Longfei. Co-simulation and digital control technology of the intelligent AC contactor[J]. Proceedings of the CSEE, 2015, 35(11): 2870-2878.
[11] 庄杰榕, 许志红. 电磁接触器多变量反馈吸持控制策略的研究[J]. 中国电机工程学报, 2019, 39(5): 1516-1526.
Zhuang Jierong, Xu Zhihong. The multivariate feedback control strategy for electromagnetic conta- ctor holding[J]. Proceedings of the CSEE, 2019, 39(5): 1516-1526.
[12] 纽春萍, 陈德桂, 张敬菽, 等. 电动斥力作用下低压断路器分断特性的研究[J]. 电工技术学报, 2005, 20(7): 34-38.
Niu Chunping, Chen Degui, Zhang Jingshu, et al. Research on the breaking characteristics of low- voltage circuit breaker with the effect of electrody- namic repulsion force[J]. Transactions of China Electrotechnical Society, 2005, 20(7): 34-38.
[13] Zhou Lianke, Man Sida, Wang Zhaobin, et al. On the relationship between contact $a$-spots features and electrodynamic repulsion force for electrical appa- ratus[J]. IEEE Transactions on Components, Packaging and Manufacturing Technology, 2018, 8(11): 1888- 1895.
[14] 庄杰榕, 许志红. 智能电磁接触器自抗扰电流模型预测控制[J]. 电工技术学报, 2018, 33(23): 5449- 5458.
Zhuang Jierong, Xu Zhihong. The active disturbance rejection with current model predictive control for intelligent electromagnetic contactor[J]. Transactions of China Electrotechnical Society, 2018, 33(23): 5449- 5458.
[15] 许志红, 张培铭. 基于神经网络的智能交流接触器分断过程设计模型的建立[J]. 电工电能新技术, 2005, 24(4): 22-25, 29.
Xu Zhihong, Zhang Peiming. Neural network based design model for intelligent AC contactor in breaking course[J]. Advanced Technology of Electrical Engin- eering and Energy, 2005, 24(4): 22-25, 29.
Abstract With the extensive use of AC contactors, energy consumption has become a problem that cannot be ignored, in which the coil holding energy consumption is the main source. In order to reduce the energy consumption, the reference value of the holding voltage or current must be as low as possible, and the control system should have the adaptive adjustment function to ensure that the effectiveness of the control is not affected by the aging of the AC contactor or the change of the mechanism characteristics. The closed-loop control mode with coil current feedback can effectively avoid the unreliable holding problem caused by temperature rise by controlling the duty cycle of the coil voltage in real time to keep the coil current at a constant value. However, the closed loop control mode usually uses several times of the critical holding current as the reference value, which will cause additional energy consumption and cannot achieve energy-saving operation in real sense. At the same time, the switching electronic devices in the coil excitation circuit need to be on and off constantly, that will bring additional switching losses. Consequently, giving consideration to both reliable holding and energy saving has become the research focus of holding process control. This paper proposes an adaptive holding control strategy based on multiple feedback parameters, which make the contactor have high holding stability even under low holding current.
Through theoretical derivation, simulation and experiment, this paper analyzes the change rule of induced electromotive force when unreliable holding event occurs, and draws the conclusion that the generation of induced electromotive force is almost synchronous with the occurrence of unreliable holding events, and the time interval from the occurrence of induced electromotive force to the contacts breaking is more than 10ms. During this period of time, it is sufficient for secondary control of the contactor. The topology control circuit of the contactor coil is designed, which can adaptively adjust the holding voltage by using the numerical control switching power supply to meet the needs of AC contactor starting and adaptive holding in the closed-loop control mode.
Taking coil current, contact current and coil induced electromotive force as feedback parameters, an adaptive holding control strategy for AC contactors based on multiple feedback parameters is proposed. Under normal conditions, the contact current and coil current are used as basic feedback parameters to adaptively adjust the holding voltage. If the moving iron core and the static one are separated abnormally, an induced electromotive force of the coil will be generated. When the induced electromotive force reaches a certain threshold, it will be detected by the single chip microcomputer in the control circuit. At this time, the coil is excited strongly by the circuit to make the moving iron core close again to ensure the reliability of the holding.
Based on the control strategy, the control module is designed and tested. The results show that the control module can achieve the following functions. ① When the contact current increases, the holding voltage of the coil can change according to the change amplitude of the contact current, indicating that the control strategy can effectively prevent the unreliable holding of the contactor caused by overload. ② When the coil current drops to a certain threshold, the output voltage of the holding power supply rises, ensuring that the AC contactor can still operate reliably when the coil is powered on for a long time or the coil is heated due to the rise of the ambient temperature. ③ In case of aging of the contactor, change of mechanism characteristics, or unreliable holding of the contactor due to external vibration and other emergencies, the multiple feedback parameter adaptive holding control module will conduct secondary control on the coil based on the induced electromotive force, effectively prevent the separation of moving and static contacts, and ensure the normal operation of the main circuit.
Keywords:AC contactor, multiple feedback parameters, adaptive holding control, induced electromotive force
中图分类号:TM572.2
DOI: 10.19595/j.cnki.1000-6753.tces.211586
福建省高校产学合作资助项目(2019H6009)。
收稿日期 2021-10-05
改稿日期 2022-01-24
E-mail: liuxj@fzu.edu.cn(通信作者)
杨 程 男,1996年生,硕士研究生,研究方向为电机与电器。
E-mail: 549046091@qq.com
(编辑 郭丽军)