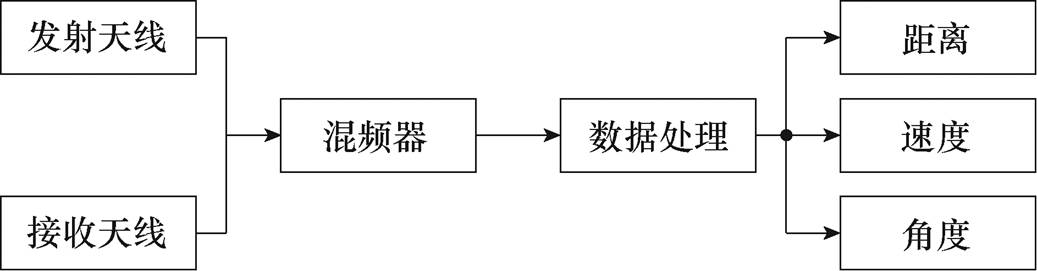
图1 调频连续波雷达原理
Fig.1 Schematic diagram of FMCW radar
摘要 电动汽车无线充电系统的一次线圈和二次线圈之间存在大空间气隙以及高强度磁场,可能对进入充电区域的生物体造成电磁伤害。因此,系统需要配备可靠、灵敏的生物体检测装置,以便在生物体侵入保护区域时及时降低或关闭充电功率。该文研究一种基于77GHz毫米波雷达并结合卡尔曼滤波和数据关联算法的运动异物检测方法,首先通过调频连续波雷达测量运动异物的速度、距离和角度;其次融合卡尔曼滤波、目标聚类和数据关联算法实现多目标运动异物的轨迹跟踪。仿真和实验结果表明,该方法能够高精度地测量运动异物的位置和速度,并具备相邻多目标检测和跟踪能力。
关键词:电动汽车无线充电 生物体检测 毫米波雷达 卡尔曼滤波 轨迹跟踪
无线充电具有无需插拔、安全可靠、自动化和智能化程度高等优点,能够有效提高充电的便捷性并提供优越的用户体验[1],有望成为未来电动汽车慢充应用场景下的主要充电模式。电动汽车无线充电系统(Electric Vehicle Wireless Charging System, EV-WCS)的功率一般为kW级,比如SAEJ2954标准定义了3.7kW、7.7kW、11kW和22kW四个功率等级[2]。在此功率等级下,无线充电系统的车载部件(Vehicle Assembly, VA)与地面部件(Ground Assembly, GA)之间的空间区域内存在高强度、高频率的磁场。该磁场强度通常会超过相关标准规定的磁场暴露限值,对偶然进入无线充电区域的生物体造成潜在的电磁危害[3]。因此,需要配备生物体检测(Living Object Detection, LOD)装置来对进入预设保护区域的人类及动物等生物体(活物)进行有效检测,以便系统在检测到有活物进入充电区域时,及时降低充电功率或停止充电,并在检测到活物离开保护区域后自动恢复充电。
现有EV-WCS活物检测方法主要可分为两类[4]:一类是基于场的检测方法,如文献[5]通过检测安装于充电线圈上方的梳状电容传感器的容值变化来实现生物体检测,但是该方法易受充电线圈电流以及充电线圈与电容传感器之间的电容耦合的影响,并且只能检测进入充电线圈上方的生物体;另一类是基于波的检测方法,主要包括热成像仪[6]、超声波传感器和雷达[7]等。热成像仪的检测效果受环境的影响大,在夜晚或者下雪、高温炎热等条件下检测精度低甚至完全无法检测。超声波传感器难以区分静止物体和运动物体,并且要求探头暴露在系统壳体外面,容易受粉尘、积雪等遮挡,导致无法实现全天候工作。相比而言,毫米波雷达具有全天候工作、受环境影响小和穿透能力强等优点,已在活物检测领域有着广泛的应用。例如,文献[8]基于毫米波雷达开发了一款能够识别周围行人的盲人手杖,从而辅助盲人安全行走。文献[9]通过安装在车内的毫米波雷达来监测驾驶员和乘客的心跳和呼吸等生命体征,从而提高驾驶安全性,避免车辆上锁后有孩童遗留在车内。文献[10]开发了基于毫米波雷达的室内人员检测和跟踪系统,可用于安全预警。目前已实现规模化商用的代表性毫米波雷达有24GHz和77GHz两个波段。其中,77GHz雷达相比于24GHz雷达具有更小的体积和更高的精度,并且近年来随着工艺的不断成熟,成本也不断下降,因此是EV-WCS活物检测领域一种具有潜力的检测技术。例如,文献[11]研究了基于毫米波雷达的汽车无线充电系统活物检测,但是该方法不能实现多目标检测与轨迹跟踪。
对于运动目标轨迹的跟踪,有助于LOD系统对运动目标是否进入或离开充电区域进行更加可靠的判断,降低对运动目标漏检和误检的概率,提高检测准确性。另外,充电区域内有可能同时出现多个生物体,因此有必要引入多目标跟踪技术。在当前的多目标跟踪技术中,状态估计和数据关联是两个关键问题。状态估计可以获得目标的状态量并对其进行滤波,形成目标的运动轨迹[12]。数据关联可以确定当前量测点的来源,将当前量测点与上一时刻的量测点进行关联[13],与状态估计结合即可生成多个目标的运动轨迹。在电动汽车无线充电系统中引入多目标跟踪机制可以获得更多活物在充电区域内部和附近区域的状态信息,系统可以利用这些信息综合判断是否需要停止充电,以便及时、准确地发出预警信号,从而更好地保护进入充电区域的生物体。目前,关于汽车无线充电活物检测方法的研究总体较少,标准尚不完善,检测精度还没有具体数值的界定[14]。另外,现有研究主要专注于无线充电区域内有无活物的判断,缺少活物多目标检测和运动轨迹跟踪方面的研究。
综上所述,本文研究基于77GHz毫米波雷达的多目标运动异物检测和轨迹跟踪方法,以提高活物检测的准确性和可靠性,更好地满足电动汽车无线充电活物检测中的应用需求。首先,分析调频连续波雷达实现距离、速度和角度测量的原理;其次,阐述多目标运动物体检测和轨迹跟踪算法;最后,通过实验验证运动目标检测算法的正确性,并通过仿真和实验验证多目标轨迹跟踪的有效性。
调频连续波(Frequency Modulated Continuous Wave, FMCW)雷达既可测距又可测速,在近距离测量方面具有显著优势。因此,本文选择的是FMCW雷达,其工作原理如图1所示,包括发射天线和接收天线。FMCW雷达通过发射天线将调制后的信号发射出去,接收天线接收反射信号,再利用傅里叶变换解算出目标物体的距离、速度和角度。其中,发射波是频率随时间以线性规律增加的正弦波,通过测量反射信号与发射信号之间的延时、频率和相位差异来确定目标的距离和速度。
图1 调频连续波雷达原理
Fig.1 Schematic diagram of FMCW radar
当FMCW雷达的发射信号遇到运动物体时会形成反射,根据多普勒效应,反射信号与发射信号之间会产生频率差。接收天线把接收到的信号送入混频器中进行混频得到一个中频输出信号。该中频信号同样是一个正弦波信号,其特点是任意时刻的瞬时频率等于两个输入信号的瞬时频率差,初始相位 等于两个输入信号的初始相位差。中频信号的表达式为
等于两个输入信号的初始相位差。中频信号的表达式为
 (1)
(1)
 (2)
(2)
式中,d为运动物体与雷达之间的距离;vc为光速;s为发射信号频率随时间变化的速率。利用傅里叶变换等数据处理方法计算出中频信号的频率f后,就可以得到d。
对于运动物体,多个反射信号的频率接近,但是相位差别较大,可推导出相位差为
 (3)
(3)
式中,Dd为发射间隔Tc内的目标移动距离;l 为发射信号起点处的波长。通过计算得到相邻反射信号对应的中频信号相位差,就可以得出Dd,进而可计算出物体的运动速度v=Dd/Tc。
角度的计算需要配置多个等间距分布的接收天线。当两个接收天线之间的距离远小于物体与雷达的距离时,可以近似认为反射信号是平行射向各个接收天线的。对于同一个发射信号,不同的接收天线所接收到的反射信号存在相位差,通过推导得出相位差与角度的关系为
 (4)
(4)
式中,ja为雷达接收信号和发射信号的相位差;q 为运动物体相对于雷达法线方向的角度。
与速度的计算原理类似,通过计算相位差ja,就可以得出运动物体相对于雷达法线方向的角度q。
本文采用的是2发4收毫米波雷达,数据处理流程如图2所示。恒虚警率检测(Constant False- Alarm Rate, CFAR)可以根据输入信号大小自适应地确定阈值。当输入信号大于阈值时,认为有目标;否则,认为没有目标。毫米波雷达发射的是调频连续波信号,也称为chirp信号,该信号的特点是频率随时间呈线性变化。对每个chirp对应的中频信号进行采样,然后进行一维快速傅里叶变换(Fast Fourier Transform, FFT),并将结果按接收天线和chirp编号进行排列,如图3所示。最后得出一个4×N×M的矩阵,矩阵中的每个元素都是一维FFT处理后的值。矩阵的峰值位置的横坐标可以通过式(2)转换为检测到的运动物体相对于雷达的距离值。
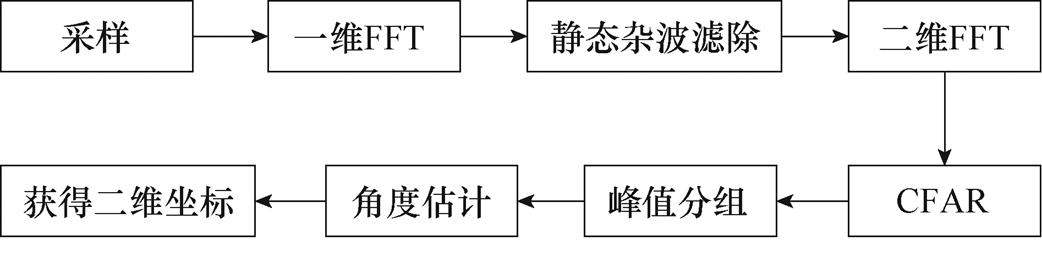
图2 数据处理流程
Fig.2 Flowchart of data processing
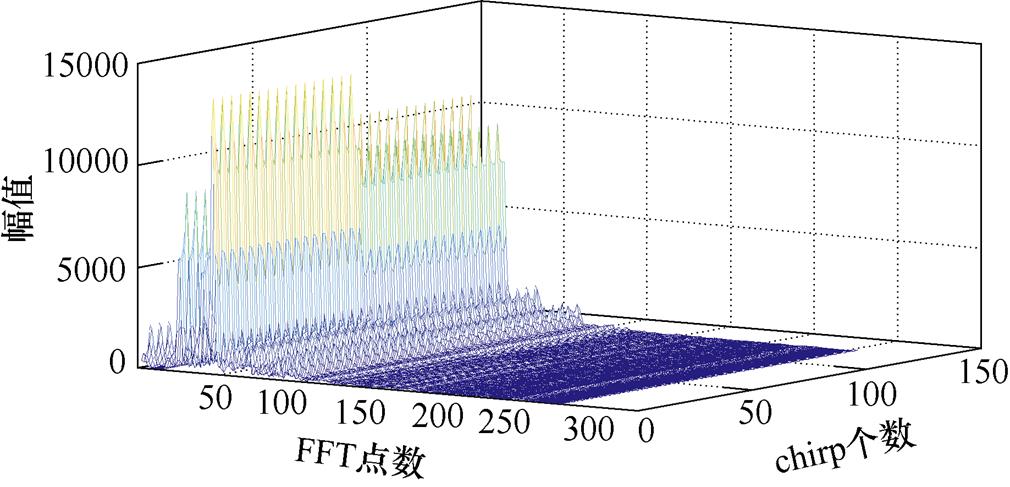
图3 距离数据矩阵的可视化表达
Fig.3 Visual representation of distance data matrix
将每个接收天线对应的数据提取出来,得到4个N×M的矩阵。对矩阵的每一列进行二维FFT处理,并将四个接收天线处理结果的模相加,得到一个N×M的检测矩阵。对检测矩阵进行二维CFAR处理,检测出峰值位置并进行峰值分组,选择每组中最大的峰值作为有效峰值。峰值位置的纵坐标可以通过式(3)转换为运动物体的速度值。
将四个接收天线中对应的有效峰值位置坐标提取出来,进行三维FFT处理,峰值位置的横坐标可以通过式(4)转换为运动物体相对于雷达发射天线中点法线的角度值。
需要指出的是,LOD的目标是能够及时检测出进入预设保护区域的生物体,并采取相应的保护措施,以避免对生物体造成潜在的电磁伤害;但由于单个FMCW雷达的测量范围有限,因此实际应用中往往需要通过多个雷达的协同才能实现对预设保护区域的全覆盖。通过设定每个雷达的检测角度、距离等参数阈值,可以由多个雷达组合形成满足应用要求的特定形状的检测区域,如椭圆形、长方形等。根据运动物体的速度方向判断有运动物体进入保护区域时,降低充电功率或停止充电;当运动物体离开保护区域时,则恢复充电功率。
2.2.1 运动模型
运动模型是一种用于描述目标实际运动物理状态的模型[15]。基于运动模型,可以通过目标上一时刻的运动状态估计出当前时刻的运动状态,因此运动模型的建立是目标跟踪的基础。由于实际中目标运动具有不确定性,建立一个在任何条件下都能准确且适用的运动模型十分困难,所以大部分现有的运动模型都是在一定的假设条件下建立的。如果在某种假设条件下建立的运动模型不能准确地反映目标的实际运动情况,则会使跟踪的精度降低甚至无法跟踪。常用的运动模型有匀速模型和匀加速模型。
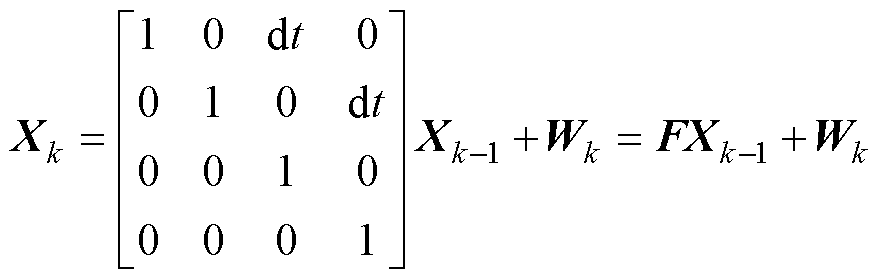
匀速模型假设目标处于匀速直线运动状态。被跟踪目标的状态量可以表示为X=[LxLyvxvy]T,其中Lx和Ly为x轴和y轴方向上的距离,vx和vy为x轴和y轴方向上的速度,其模型方程可以描述为
 (5)
(5)
式中,Xk和Xk-1分别为k时刻和k-1时刻目标的状态量;F为k-1时刻到k时刻的状态转移矩阵;Wk为过程噪声;dt为时间间隔。
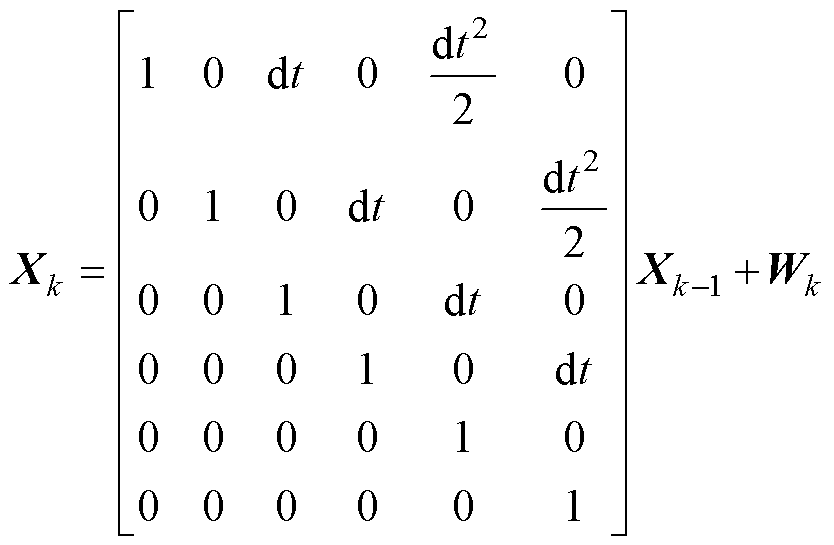
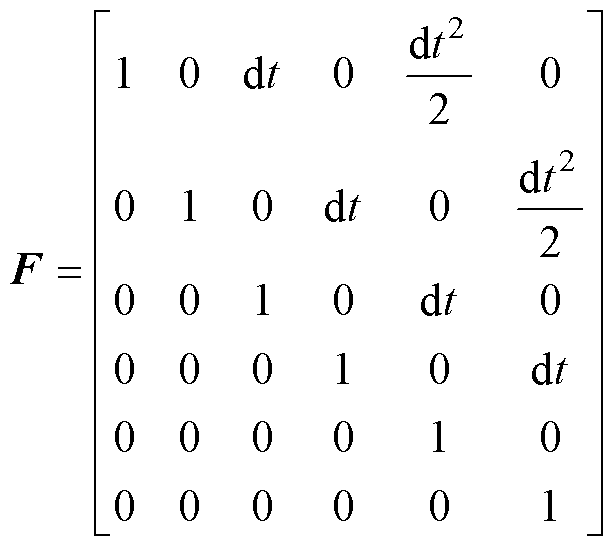
在假设目标为匀加速直线运动状态时,被跟踪目标的状态量可以表示为X=[LxLyvxvyaxay]T,其中ax和ay为x轴和y轴方向上的加速度,其余量的含义和匀速模型相同。匀加速状态下的模型方程可表示为
 (6)
(6)
匀速运动模型和匀加速运动模型的速度或加速度总体上并非不变,从式(5)和式(6)可知,由于存在过程噪声Wk,速度和加速度本身随着状态的变化也在迭代更新,所以运动目标不是严格的匀速运动或匀加速运动时依然可以采用这两种运动模型。当短时间内目标在x轴和y轴方向上的运动可以近似为匀速直线运动或匀加速直线运动时,采用上述两种运动模型能够在减少计算量的同时达到较高精度。汽车无线充电场景下活物检测的对象主要是猫、狗等小动物,以及人类。考虑到这些被检测目标进出检测区域具有明显的随意性,连续多个时刻内保持匀速的可能性较低,因此本文采用匀加速模型来描述活物的运动特征。
2.2.2 卡尔曼滤波
无线充电过程中,高频电流会对雷达产生一定的噪声干扰;同时,雷达受分辨率的限制无法精确地表达活物的位置和速度,所以有必要采用滤波算法来提高检测精度,以及轨迹跟踪的可靠性。卡尔曼滤波通过系统输入输出观测数据对系统状态进行最优估计[16],尤其适用于运动状态频繁变化的运动行为预测,是一种广泛应用的跟踪滤波算法,具有优异的综合性能。卡尔曼滤波主要分为预测和更新两个阶段,预测阶段可以根据运动模型建立状态方程和观测方程,状态方程可以根据上一时刻的最优估计值得到当前时刻的预测值。由于雷达的测量值与运动状态量往往不一致,所以观测方程可以将预测的状态量转换为传感器的测量值。更新阶段可以对状态方程的预测值和观测方程的观测值进行加权,得到一个综合考虑预测值和测量值的当前时刻的最优估计值。本文引入卡尔曼滤波算法,以减少噪声的影响,提高目标轨迹跟踪精度。
当传感器的测量值与目标运动的状态量为线性关系时,可以使用线性卡尔曼滤波。此时,预测阶段状态方程和误差协方差矩阵分别为
 (7)
(7)
 (8)
(8)
观测方程为
 (9)
(9)
式中,Zk为由预测值转换生成的观测量;H为状态量转换为观测量的观测矩阵;Q为过程噪声的协方差;Vk为观测噪声,即传感器噪声; 为误差协方差矩阵。
为误差协方差矩阵。
当采用匀加速运动模型时,状态转移矩阵为
若传感器可以直接观测到目标x轴和y轴方向上的距离,则观测量Zk=[Rx Ry]T,此时观测矩阵为
更新阶段的过程如下。
 (10)
(10)
 (11)
(11)
 (12)
(12)
 (13)
(13)
式中,S为新息协方差矩阵;Rk为观测噪声的方差;K为卡尔曼增益;Z为当前时刻传感器的测量值; 为k时刻的最优估计值。
为k时刻的最优估计值。
卡尔曼滤波通过对预测和更新两个过程的反复迭代,可以实现实时滤波处理,提高跟踪精度。在实际应用中,雷达的测量值(距离、角度和速度)大多是在极坐标下表示的,而跟踪的过程在直角坐标系下进行,所以状态量和测量值之间的关系往往是非线性的,这时观测矩阵H无法给出,需要采用扩展卡尔曼滤波算法。
扩展卡尔曼滤波通过泰勒级数展开,忽略二阶及以上的高阶项,将非线性模型近似为线性模型,使用雅可比矩阵来代替观测矩阵H,再进行线性卡尔曼滤波。
雅可比矩阵的定义为
当采用匀加速运动模型时,若传感器的观测量为距离、角度和速度,即Zk=[dq v]T,则对应的雅可比矩阵为

2.2.3 目标聚类
由于汽车无线充电的活物检测区域较小(通常在1m以内),而77GHz毫米波雷达的分辨率较高,所以检测到的目标一般为扩展目标,即一个目标会产生多个检测点。同时,在实际的检测中由于环境的原因可能会产生与目标无关的检测点,即杂波点。所以需要对多个检测点进行聚类以减少后续的计算量,同时需要剔除杂波点。在进行多目标跟踪时,由于目标数量未知,并且考虑到不同目标产生的多个检测点密度大致相同,所以本文采用DBSCAN(density-based spatial clustering of applications with noise)算法进行聚类。DBSCAN[17]是一种基于密度的聚类方法,它将点云分成密度大致相同的多个簇,其示意图如图4所示。这种方法不需要预先给定簇的数量,而且对于点云的形状没有严格要求。另外,由于杂波点的密度和检测点的密度往往存在明显差异,所以该方法能够有效剔除杂波点。
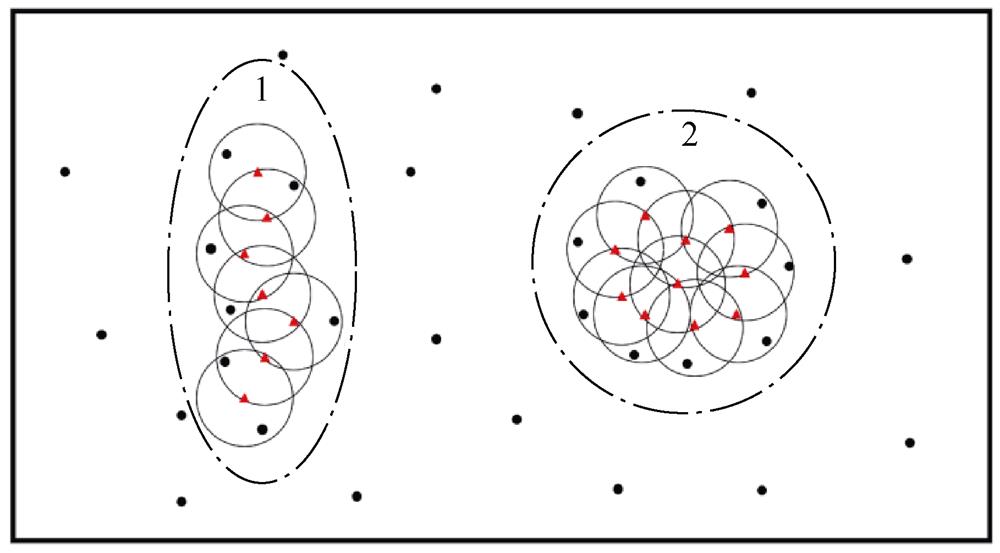
图4 DBSCAN聚类算法示意图
Fig.4 Schematic of DBSCAN clustering algorithm
DBSCAN算法需要事先确定参数MinPts和e ,其中MinPts表示每个簇中最少包含的点数,e 表示空间邻域的范围。假设在某个数据点的e 邻域范围内存在至少MinPts个其他点,则认为该点为核心点。若某个核心点的e 邻域范围内存在其他核心点,则认为两个核心点及其邻域范围内的点为同一类。图4中,红色三角形的点为核心点,DBSCAN算法在点云中聚类出两个目标,在两个目标邻域范围之外的点则为离散数据点。
2.2.4 数据关联
为了保证活物检测的准确性和可靠性,无线充电系统需要考虑多个生物体同时存在或进出检测区域的情况。当预设保护区域内同时出现多个生物体时,系统需要对各个目标的轨迹进行跟踪。数据关联是多目标跟踪的一个重要环节。实现多目标跟踪的重点在于对当前检测点的来源进行判断,即当前检测点与已有的航迹进行匹配[18]。单一的卡尔曼滤波只能实现对单个目标的跟踪,当检测范围内出现多个目标时,若卡尔曼滤波的预测值和传感器的测量值无法匹配,则在计算过程中会出现发散的情况,导致跟踪错误进而影响活物检测系统的判断。进行数据关联后,可以将检测到的目标点进行分类,再分别对每一类进行跟踪,从而实现多目标跟踪。
关联波门是数据关联的基础。它是整体检测区域中的子区域,其波门中心由预测值决定,波门大小由新息协方差决定。落入关联波门内的检测点称为候选点。常用的波门形状包括环形、矩形、椭圆形和极坐标下的扇形,本文选择椭圆形波门。
椭圆形波门是根据马氏距离生成的一种波门。马氏距离通过样本的分布规律可以有效表示两个样本的相似程度,其定义为
 (14)
(14)
式中,xa为当前时刻雷达检测到的点;ya为某一航迹上一时刻对当前时刻的预测值; 为对应航迹上一时刻的新息协方差。
为对应航迹上一时刻的新息协方差。
若检测点与预测点的马氏距离小于阈值g (跟踪门的门限),则该检测点为候选点,即
 (15)
(15)
式中,门限g 根据卡方分布获得,卡方分布的自由度由测量值Z的维数决定。对于毫米波雷达,测量值是三维数据,则卡方分布的自由度为3。
在数据关联中,直接选择与预测值点的马氏距离最小的候选点作为航迹关联点的方法称为最近邻域法。最近邻域法简单、实时性好,在少杂波和目标稀疏的情况下具有较好的性能,但是在多杂波或跟踪目标密集的时候关联效果较差。
联合概率数据关联算法(Joint Probabilistic Data Association, JPDA)是一种在概率数据关联算法的基础之上提出的数据关联算法。它通过排列组合和穷举的思想,计算出最高概率的关联方式,能够对密集杂波环境下的多目标进行有效跟踪。JPDA认为每个检测点既有可能来源于已有航迹,也有可能来源于虚警,通过计算每个检测点与已有航迹的关联性,建立确认矩阵。确认矩阵中既包括了检测点来源于已有航迹的可能,也包括了检测点是虚警的可能性。将确认矩阵进行拆分,生成关联矩阵,然后计算关联矩阵的关联概率,得到检测点来源于已有航迹的概率和来源于虚警的概率,最后将每个检测点的状态量进行加权平均,得到目标状态的最终估计值[19]。
假设有M个已有航迹,当前时刻有N个检测点,则确认矩阵可以表示为
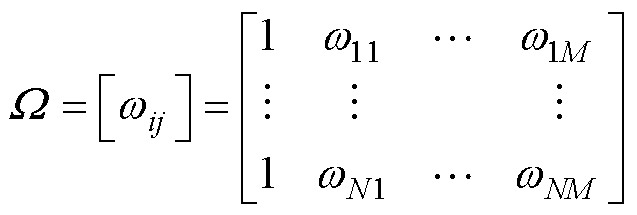
确认矩阵的每个元素非0即1,wij为1表示第i个检测点与第j个航迹关联,反之,wij为0表示第i个检测与第j个航迹不关联,确认矩阵的第一列都为1表示所有检测点都有可能来源于虚警。
得到确认矩阵后按照排列组合的方法进行拆分,生成对应每种可能的关联矩阵。拆分的过程需要遵循以下两个基本准则:
(1)每个检测点的来源是唯一的,即每一行有且仅有一个元素为1,其余为0。
(2)每个航迹最多关联一个检测点,即除第一列以外,其他列中最多有一个元素为1。
得到关联矩阵后,计算每个关联矩阵的关联概率bij。假设与某个航迹关联的概率服从高斯分布Nij(Zi(k)),则关联概率为
 (16)
(16)
式中,c为归一化常数;V为关联波门的面积;t为量测指示器,表示第j个观测点是否和某一个真实的轨迹关联;d 为目标指示器,表示是否存在与第i个航迹关联的观测点,t 和d 均为二进制数; 为预设的目标检测概率;f 为虚警数量;
为预设的目标检测概率;f 为虚警数量; 是虚警数量为f 的概率。
是虚警数量为f 的概率。
一般有两种模型,即参数模型和非参数模型。若杂波的数量f 服从泊松分布,则为参数模型,此时可表示为
 (17)
(17)
式中,lp为泊松分布系数,表示虚警的空间密度,此时关联概率bij为
 (18)
(18)
式中, 为对应的归一化常数。
为对应的归一化常数。
若杂波的数量 服从均匀分布,则为非参数模型,此时可表示为
服从均匀分布,则为非参数模型,此时可表示为
 (19)
(19)
式中,e 为常数。此时关联概率bij为
 (20)
(20)
式中, 为对应的归一化常数。
为对应的归一化常数。
计算得到关联概率bij后,利用全概率公式对卡尔曼滤波中的状态量和协方差矩阵进行更新。
 (21)
(21)
 (22)
(22)
式中,为卡尔曼滤波后的最优估计值; 为关联后的最终估计值;
为关联后的最终估计值; 为预测值。
为预测值。
综上所述,考虑到汽车无线充电的活物检测区域较小,多目标跟踪时多个活物的运动轨迹靠近甚至交叉的可能性较大;另外,充电过程中由于高频电流产生的杂波也可能较为密集,本文选择JPDA数据关联算法。JPDA的优势在于杂波和目标密集时依然具有良好的性能。
本节将通过实验和仿真,验证第1节和第2节所述多目标运动物体检测和轨迹跟踪方法的有效性。搭建的实验系统如图5所示,一次侧和二次侧均采用LCC谐振补偿结构[20],接收线圈(外轮廓260×260mm2,共10匝)和发射线圈(外轮廓580× 420mm2,共20匝)尺寸根据SAEJ2954中的WPT1/Z1标准设计,线圈距离11cm,详细参数配置见表1。CAN收发模块用于将毫米波雷达的检测结果上传到上位机。实验中采用的77GHz毫米波雷达型号为TIIWR1642。该雷达集成了C674x DSP和ARM Cortex-R4F微控制器,具有4GHz的连续带宽,水平视角为120°,垂直视角为30°,参数配置为:最大探测距离为9m,距离分辨率为0.044m,最快探测速度为2m/s,速度分辨率为0.13m/s。根据文献[3]的研究结果,当无线充电功率为7.7kW和22kW时,安全距离分别为0.6m和0.7m。因此,本文所采用的毫米雷达的距离测量范围和分辨率能够满足汽车无线充电活物检测应用的要求。
表1 实验系统参数
Tab.1 Parameters of the experimental prototype
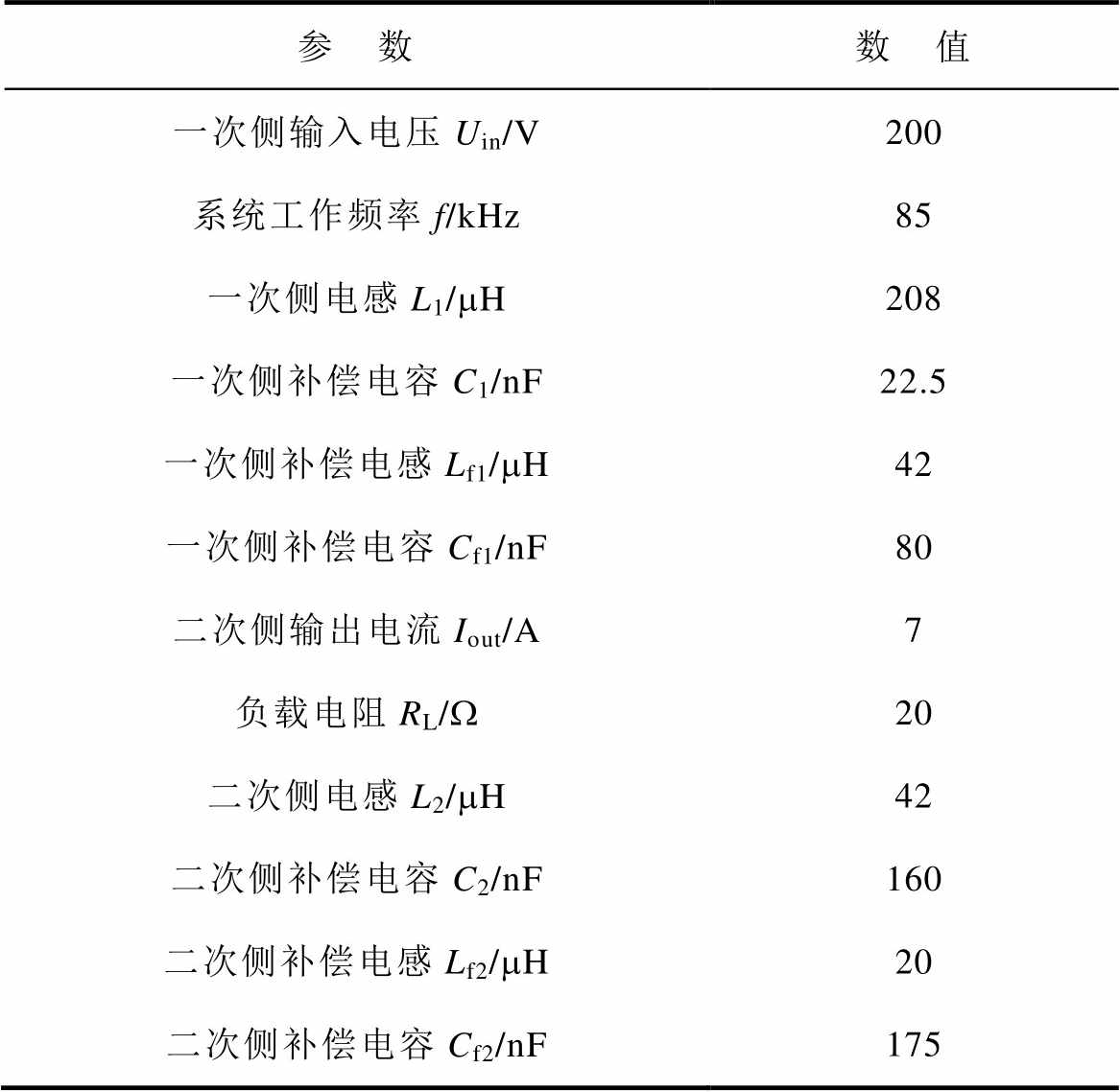
参 数数 值 一次侧输入电压Uin/V200 系统工作频率f/kHz85 一次侧电感L1/mH208 一次侧补偿电容C1/nF22.5 一次侧补偿电感Lf1/mH42 一次侧补偿电容Cf1/nF80 二次侧输出电流Iout/A7 负载电阻RL/W20 二次侧电感L2/mH42 二次侧补偿电容C2/nF160 二次侧补偿电感Lf2/mH20 二次侧补偿电容Cf2/nF175
为了验证图2中所示距离、角度和速度测量算法的有效性,构建了如图5所示的实验场景,毫米波雷达置于线圈边沿10cm处。扇形区域为设定的单个雷达检测区域,整个大扇形区域的角度为120°,每个小扇形区域为30°。分别在开启和关闭充电功率条件下(二次侧输出功率为1kW时的实验波形如图6所示,其中1~4通道分别为逆变器输出电压、逆变器输出电流、一次侧线圈电流和负载电流),开展了以下四组测试:
(1)测试一,单个运动物体位于雷达0°方向、60cm处。
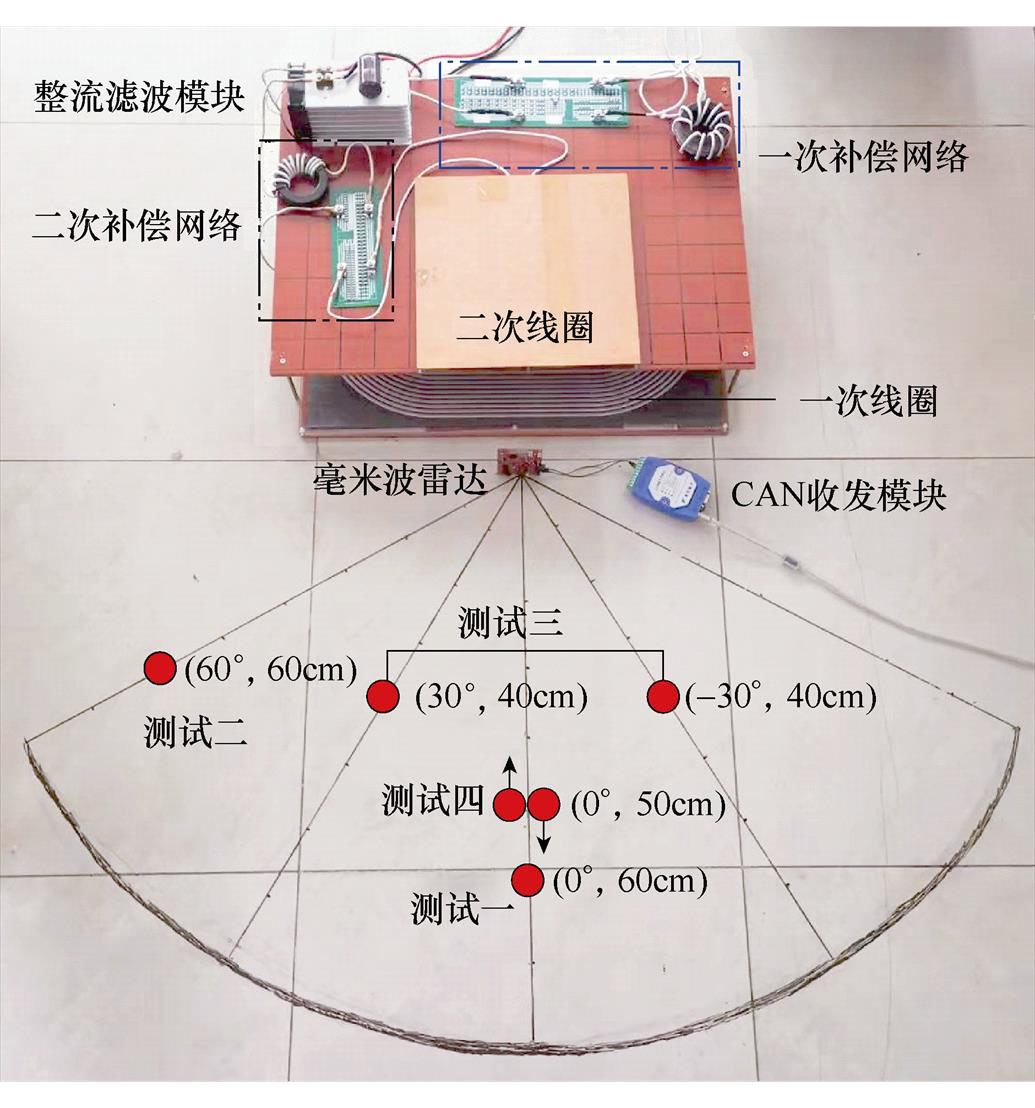
图5 实验系统实物照片
Fig.5 Photograph of the experimental system
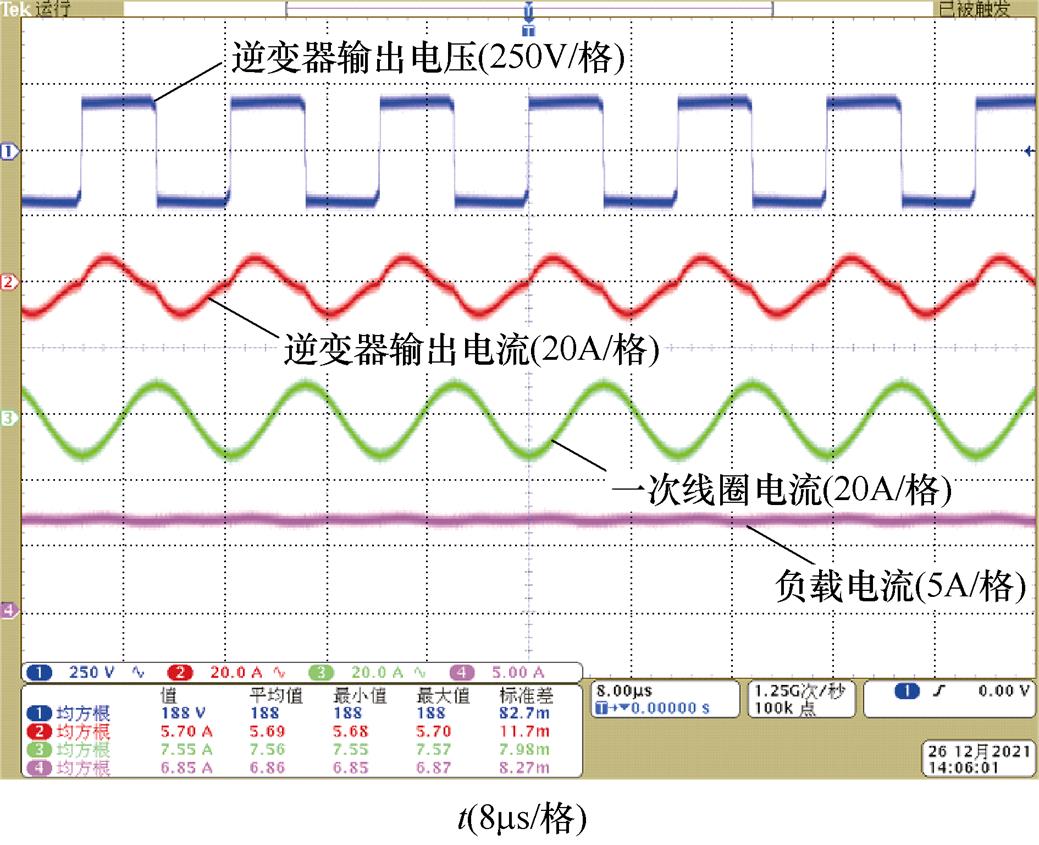
图6 1kW功率输出实验波形
Fig.6 Experimental waveforms related to 1kW output power
(2)测试二,单个运动物体位于雷达60°方向、60cm处。
(3)测试三,两个运动物体分别位于雷达30°和-30°方向、40cm处。
(4)测试四,两个运动物体位于雷达0°方向、50cm处,运动方向相反。
实验中,采用成人的拳头模拟运动物体。经过静态杂波滤除算法滤除周边静态物体后的运动物体检测结果见表2。从实验结果可以看出,本文开发的运动异物检测方法能够较为准确地检测出预设范围内的运动物体的距离、角度和数量,距离测量误差在2cm以内;具有较高的距离分辨率,能够区分距离较近的相邻运动物体,满足汽车无线充电实际应用中对于多个目标生物体检测的需求;无线充电功率开启与否,对检测精度没有明显影响。需要指出的是,在多次实验过程中,很难保持运动物体的位置一致,因此表2中给出的是通过多次测量取平均值的结果。
表2 运动物体检测结果
Tab.2 Results of moving object detection
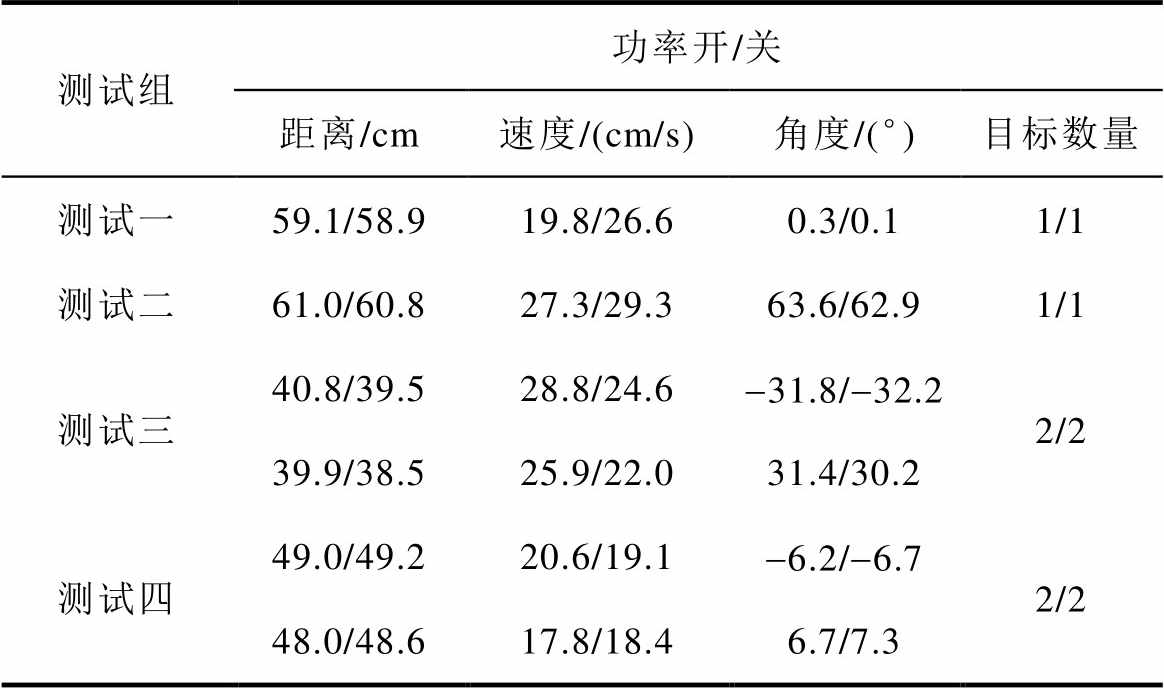
测试组功率开/关 距离/cm速度/(cm/s)角度/(°)目标数量 测试一59.1/58.919.8/26.60.3/0.11/1 测试二61.0/60.827.3/29.363.6/62.91/1 测试三40.8/39.528.8/24.6-31.8/-32.22/2 39.9/38.525.9/22.031.4/30.2 测试四49.0/49.220.6/19.1-6.2/-6.72/2 48.0/48.617.8/18.46.7/7.3
仿真场景配置如图7所示,检测区域扇形角度为(-60°, 60°),半径为1m;充电警戒区域的扇形角度为(-60°, 60°),半径为0.7m。当目标进入检测区域时开始对其进行跟踪,当目标进入充电警戒区域时,系统应降低充电功率或停止充电,直到充电警戒区域内没有活物才恢复正常充电。
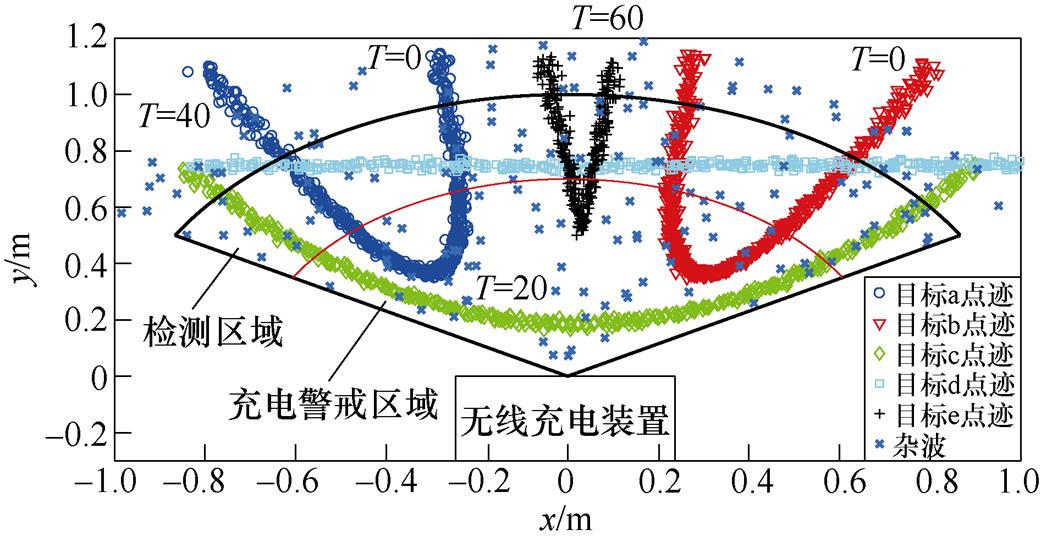
图7 仿真数据点分布
Fig.7 Distribution of simulation data
本节对5个匀加速目标进行仿真模拟,整个跟踪过程共计120个时刻,时间间隔dt =0.05s。目标a和b从第一个时刻开始运动,目标c在第20个时刻开始运动,目标d在第40个时刻开始运动,目标e在第60个时刻开始运动。目标a的初始位置和状态为[-0.8m, 1.1m, 0.25m/s, -0.5m/s, -0.055m/s2, 0.17m/s2],目标b的初始位置和状态为[0.8m,1.1m, -0.25m/s, -0.5m/s, 0.055m/s2, 0.17m/s2],目标c的初始位置和状态为[0.9m,0.75m, -0.35m/s, -0.45m/s, 0m/s2, 0.18m/s2],目标d的初始位置和状态为[1m,0.75m, -0.38m/s, 0m/s, -0.04m/s2, 0m/s2],目标e的初始位置和状态为[0.1m,1.1m, -0.05m/s, -0.4m/s, 0m/s2, 0m/s2]。第五个目标在靠近无线充电装置的过程中加入了速度方向的突变,即将沿y轴的速度方向突然调转180°。5个目标均为扩展目标,在生成目标点迹图时加入了噪声,噪声的密度满足泊松分布、坐标满足均匀分布。图7给出了仿真中120个时刻内所有目标点及噪声点的分布情况。
DBSCAN算法中,MinPts为3, 为0.05。实时对检测到的点进行聚类,以减少后续处理的计算量,聚类结果及误差如图8所示。从图中可以看出,DBSCAN算法可以有效滤除杂波点,最大聚类误差不超过3cm,5个目标聚类的平均误差分别为0.63cm、0.66cm、0.48cm、0.60cm和0.71cm。
为0.05。实时对检测到的点进行聚类,以减少后续处理的计算量,聚类结果及误差如图8所示。从图中可以看出,DBSCAN算法可以有效滤除杂波点,最大聚类误差不超过3cm,5个目标聚类的平均误差分别为0.63cm、0.66cm、0.48cm、0.60cm和0.71cm。
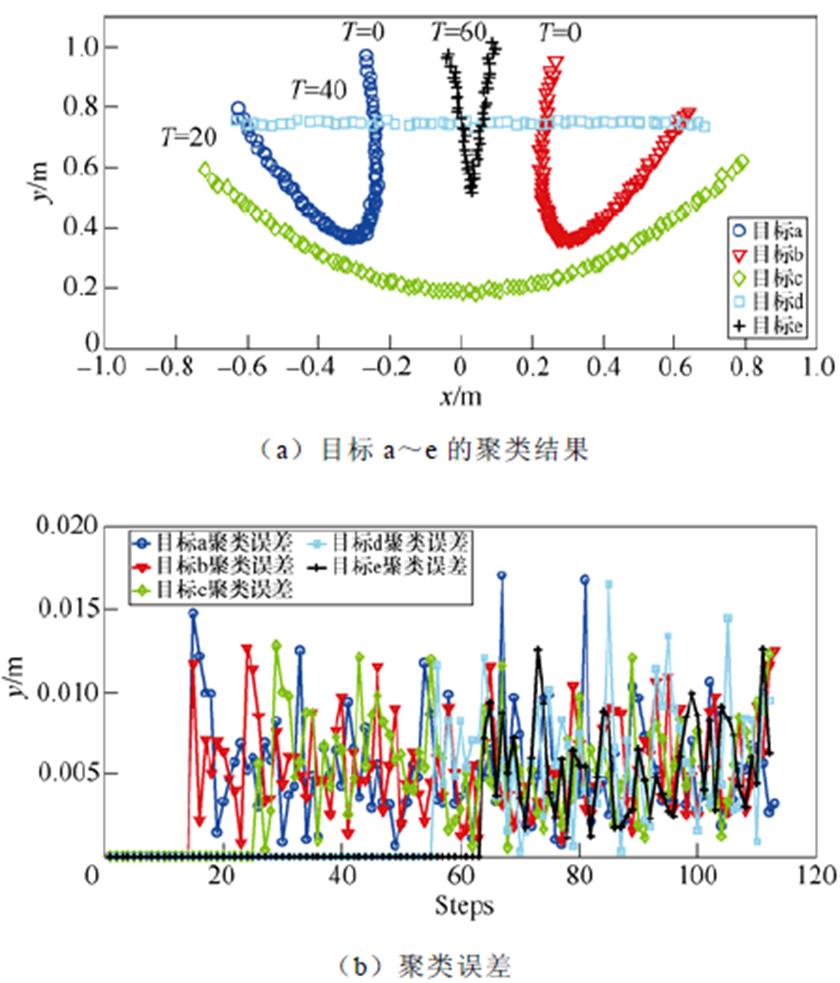
图8 目标聚类结果及误差
Fig.8 Clustering results and errors of target clustering
图9a给出了对5个目标的实际轨迹和跟踪结果,图9b给出了轨迹跟踪的方均误差。可以看出,本文算法能够对多个目标同时进行跟踪。每个目标的跟踪误差最大值均出现在初期,并且跟踪误差随时间整体呈下降趋势,下降到一定程度后保持稳定。当有新的跟踪目标出现时,雷达依然可以对其进行跟踪,并且在经过一段时间后,跟踪误差可以下降到较低水平。在各个目标出现后的15个时刻内的跟踪误差平均值分别为0.58cm、0.67cm、0.87cm、3.3cm和0.42cm。每个目标在出现15个时刻以后的跟踪误差平均值分别为0.35cm、0.39cm、0.39cm、1.2cm和0.92cm。每个目标整体的跟踪误差平均值分别为0.39cm、0.43cm、0.47cm、1.8cm和0.78cm。
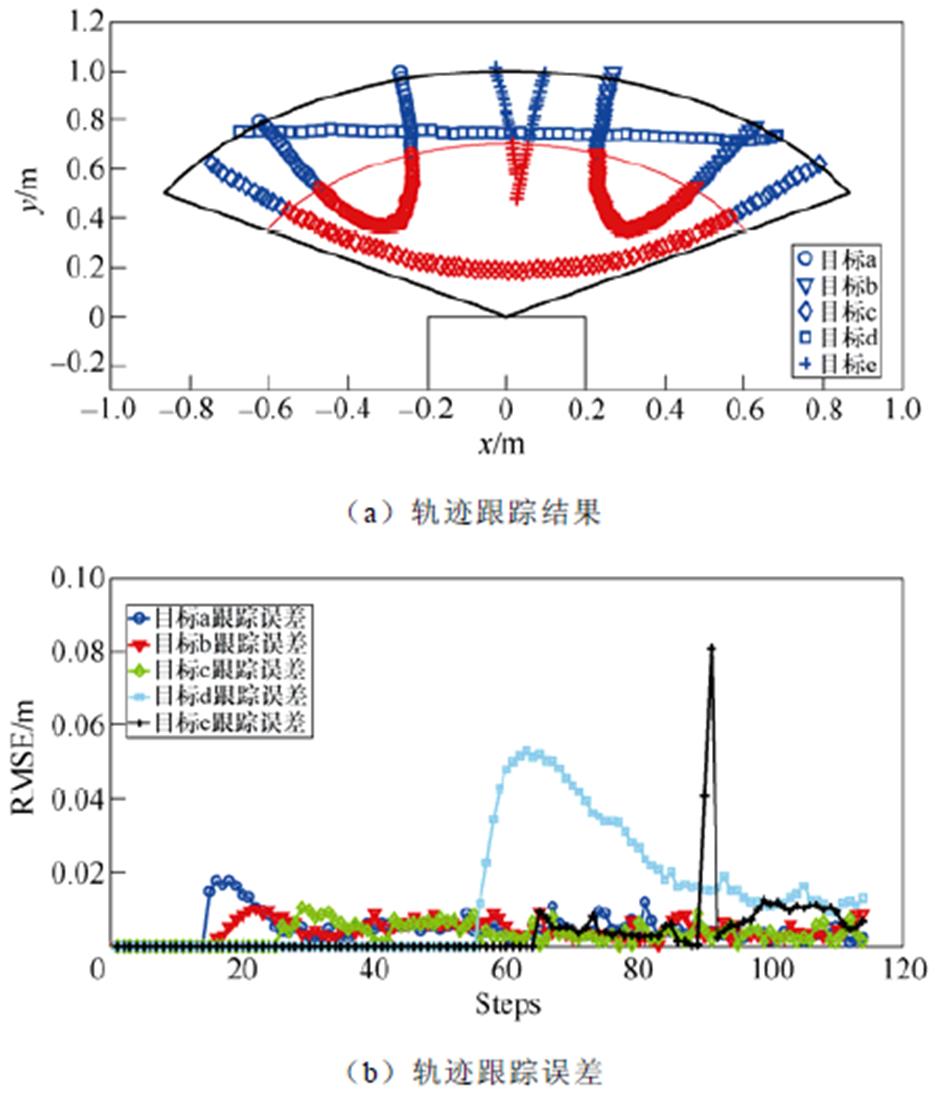
图9 5个目标轨迹跟踪结果及误差
Fig.9 Results and errors of trajectory tracking of five objects
另外,由图9可知,目标e在运动过程中加入了速度方向的突变,所以在突变瞬间出现了目标丢失。这是因为数据关联的依据是相邻时刻之间距离、角度和速度三个量的关系,速度方向如果突然发生明显改变,则会造成关联失败,此时完全根据卡尔曼滤波的预测值生成轨迹。连续多个时刻关联失败则取消对当前轨迹的跟踪,利用检测点重新生成目标轨迹。同时,由于本文采用的是匀加速运动模型,生成轨迹的过程中会更倾向于目标进行曲线运动,因此在对目标d跟踪时前15个时刻的误差较大,后续误差逐渐降低。
为了进一步验证本文运动物体轨迹跟踪算法的有效性,在系统二次侧输出功率1kW的条件下,开展了以下三组轨迹跟踪实验测试:
(1)测试a:运动物体从雷达(0°, 80cm)处运动至(0°, 40cm)处,然后再返回起始点。
(2)测试b:运动物体从雷达(-30°, 80cm)处运动至(-30°, 20cm)处,然后再返回起始点。
(3)测试c:运动物体从雷达(30°, 80cm)处运动至(30°, 20cm)处,然后再返回起始点。
三组轨迹跟踪实验结果如图10所示。可以看出,雷达检测点分布在参考轨迹5cm范围以内,各个运动物体的跟踪轨迹和参考轨迹的重合度较高,说明本文算法对不同方向、不同距离的运动物体均能准确地进行轨迹跟踪。需要说明的是,由于实验中采取手动移动测试物体的方式,无法准确获取各个运动物体每个时刻的真实位置,也难以保证模拟运动物体始终严格按照参考轨迹运动,因此本文并未对轨迹跟踪实验结果做定量误差分析。
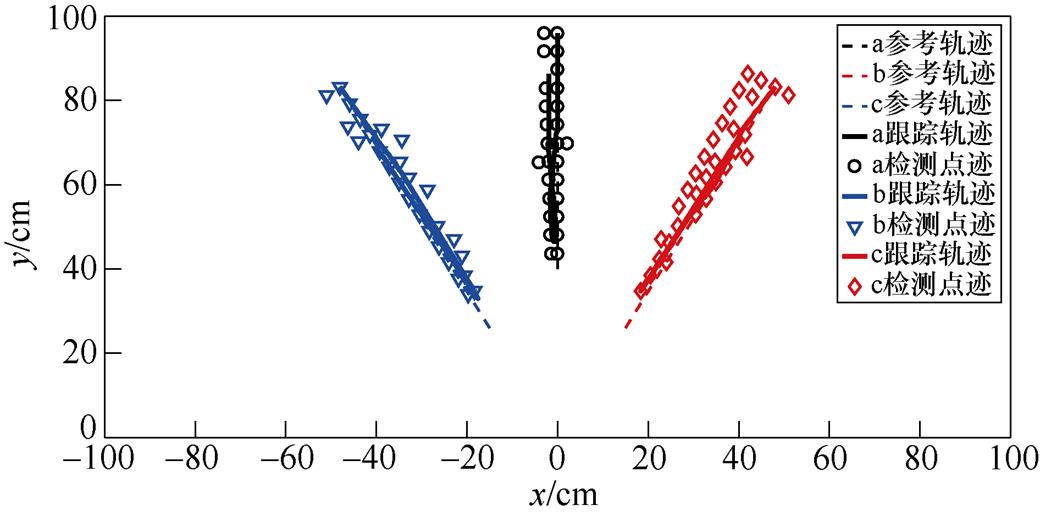
图10 三组轨迹跟踪实验结果
Fig.10 Experimental results of trajectory tracking
无线充电系统活物检测应用中,相比于仅采用雷达原始测量数据,使用滤波后的值作为判断活物是否进入充电区域的依据会更加准确。引入轨迹跟踪机制后,活物检测系统可以根据目标运动轨迹和趋势采取更加精细化的保护措施。比如,当检测到运动目标向充电区域靠近且有进入充电保护区域的趋势时,系统可以提前降低充电功率,当活物进入充电保护区域后再关闭充电功率;当检测到运动目标从充电保护区域向外运动至一定距离时,则自动恢复充电。这也将有助于提高活物检测的准确率和可靠性。
为了避免电动汽车无线充电区域内的高频高功率磁场对活物造成潜在的电磁伤害,本文研究了一种基于77GHz毫米波雷达的运动异物检测和运动轨迹跟踪方法。阐述了毫米波雷达实现距离、速度和角度测量的基本原理,并进行了实验验证。结果表明,该方法具有较高的距离测量精度,且能够实现多目标检测,满足电动汽车无线充电活物检测的需求。在运动异物检测的基础上,引入了结合卡尔曼滤波和联合概率数据关联算法的运动轨迹跟踪机制,以对充电区域外一定范围内和充电区域内部的运动物体进行跟踪。仿真和实验结果表明,卡尔曼滤波算法可以平滑目标运动轨迹,存在杂波和目标轨迹交叉的情况下,联合概率数据关联算法依然能够完成数据关联,实现多目标跟踪。
本文实现活物检测的原理是多普勒效应。从本质上来讲,任何与雷达之间存在相对运动的物体都将使雷达产生响应。因此,从硬件层面并不能明确区分运动物体是生物体或非生物体,故本文并未严格区分运动物体和生物体。在未来的工作中,将尝试通过目标的运动特征、点云形状和相同距离下的反射信号强度等差异从算法层面来实现生物体和非生物体的区分,以更好地满足无线充电系统活物检测的应用需求。
参考文献
[1] 薛明, 杨庆新, 章鹏程, 等. 无线电能传输技术应用研究现状与关键问题[J]. 电工技术学报, 2021, 36(8): 1547-1568.
Xue Ming, Yang Qingxin, Zhang Pengcheng, et al. Application status and key issues of wireless power transmission technology[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1547-1568.
[2] 吴理豪, 张波. 电动汽车静态无线充电技术研究综述(上篇)[J]. 电工技术学报, 2020, 35(6): 1153-1165.
Wu Lihao, Zhang Bo. Overview of static wireless charging technology for electric vehicles: part Ⅰ[J]. Transactions of China Electrotechnical Society, 2020, 35(6): 1153-1165.
[3] Zhao Jun, Wu Zhijun, Li Nailiang, et al. Study on safe distance between human body and wireless charging system of electric vehicles with different power and frequencies[J]. Electrical Engineering, 2020, 102(4): 2281-2293.
[4] Zhang Yiming, Yan Zhengchao, Zhu Jiaqi, et al. A review of foreign object detection (FOD) for inductive power transfer systems[J]. eTransportation, 2019, 1: 100002.
[5] Jeong S Y, Kwak H G, Jang G C, et al. Living object detection system based on comb pattern capacitive sensor for wireless EV chargers[C]//2016 IEEE 2nd Annual Southern Power Electronics Conference, Auckland, New Zealand, 2016: 1-6.
[6] Sonnenberg T, Stevens A, Dayerizadeh A, et al. Combined foreign object detection and live object protection in wireless power transfer systems via real-time thermal camera analysis[C]//2019 IEEE Applied Power Electronics Conference and Expo- sition, Anaheim, CA, USA, 2019: 1547-1552.
[7] 苏玉刚, 侯信宇, 戴欣. 磁耦合无线电能传输系统异物检测技术综述[J]. 中国电机工程学报, 2021, 41(2): 715-727.
Su Yugang, Hou Xinyu, Dai Xin. Review of foreign object detection technology in magnetic coupling wireless power transfer system[J]. Proceedings of the CSEE, 2021, 41(2): 715-727.
[8] Cardillo E, Li Changzhi, Caddemi A. Millimeter- wave radar cane: a blind people aid with moving human recognition capabilities[J]. IEEE Journal of Electromagnetics, RF and Microwaves in Medicine and Biology, 2022, 6(2): 204-211.
[9] Schwarz C, Zainab H, Dasgupta S, et al. Heartbeat measurement with millimeter wave radar in the driving environment[C]//2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 2021: 1-6.
[10] Zhao Peijun, Lu C X, Wang Jianan, et al. Human tracking and identification through a millimeter wave radar[J]. Ad Hoc Networks, 2021, 116: 102475.
[11] Poguntke T, Schumann P, Ochs K. Radar-based living object protection for inductive charging of electric vehicles using two-dimensional signal processing[J]. Wireless Power Transfer, 2017, 4(2): 88-97.
[12] 黄晶, 李勇, 胡林. 基于数据关联和改进统计模型的激光雷达目标跟踪研究[J]. 汽车工程, 2018, 40(3): 356-362.
Huang Jing, Li Yong, Hu Lin. A research on target tracking by LIDAR based on data association and improved statistical model[J]. Automotive Engin- eering, 2018, 40(3): 356-362.
[13] 靳标, 李聪, 郭交, 等. 多普勒信息辅助的杂波环境下多目标跟踪算法[J]. 电子科技大学学报, 2019, 48(4): 511-517.
Jin Biao, Li Cong, Guo Jiao, et al. Multi-target tracking in clutter aided by Doppler information[J]. Journal of University of Electronic Science and Technology of China, 2019, 48(4): 511-517.
[14] 张献, 邢子瑶, 薛明, 等. 无线电能传输系统异物检测技术研究综述[J]. 电工技术学报, 2022, 37(4): 793-807.
Zhang Xian, Xing Ziyao, Xue Ming, et al. Overview of foreign object detection in wireless power transfer system[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 793-807.
[15] 卢晓东, 辛佳宁, 顾嘉耀, 等. 析构时间相关模型的面对称飞行器机动估计[J]. 宇航学报, 2021, 42(2): 167-174.
Lu Xiaodong, Xin Jianing, Gu Jiayao, et al. Maneuvering estimation for plane-symmetric aircraft based on destructive time-dependent model[J]. Journal of Astronautics, 2021, 42(2): 167-174.
[16] 乔少杰, 韩楠, 朱新文, 等. 基于卡尔曼滤波的动态轨迹预测算法[J]. 电子学报, 2018, 46(2): 418- 423.
Qiao Shaojie, Han Nan, Zhu Xinwen, et al. A dynamic trajectory prediction algorithm based on Kalman filter[J]. Acta Electronica Sinica, 2018, 46(2): 418- 423.
[17] 胡金磊, 赖俊驹, 黎阳羊, 等. 基于自适应DBSCAN算法的开关柜绝缘状态评价方法[J]. 电工技术学报, 2021, 36(增刊1): 344-352.
Hu Jinlei, Lai Junju, Li Yangyang, et al. Evaluation method of switchgear insulation state based on adaptive density based spatial clustering of appli- cations with noise algorithm[J]. Transactions of China Electrotechnical Society, 2021, 36(S1): 344-352.
[18] 龚轩, 乐孜纯, 王慧, 等. 多目标跟踪中的数据关联技术综述[J]. 计算机科学, 2020, 47(10): 136- 144.
Gong Xuan, Le Zichun, Wang Hui, et al. Survey of data association technology in multi-target tracking[J]. Computer Science, 2020, 47(10): 136-144.
[19] 侯淋, 杨顺华. 光电雷达多目标跟踪技术发展分析[J]. 电光与控制, 2021, 28(8): 65-70.
Hou Lin, Yang Shunhua. Analysis on development of IRST multi-target tracking technologies[J]. Electronics Optics & Control, 2021, 28(8): 65-70.
[20] Li Siqi, Li Weihan, Deng Junjun, et al. A double- sided LCC compensation network and its tuning method for wireless power transfer[J]. IEEE Transa- ctions on Vehicular Technology, 2015, 64(6): 2261- 2273.
Moving Foreign Object Detection and Track for Electric Vehicle Wireless Charging Based on Millimeter-Wave Radar
Abstract In recent years, the electric vehicle wireless charging system (EV-WCS) has been widely concerned because it is safe, reliable, automatic, and environment-friendly. The high-frequency and high-power electromagnetic field between the transmitting coil and receiving coil of an EV-WCS may be harmful to an intruded living object. Therefore, a reliable and sensitive living object detection device has to be equipped to reduce or close the charging power as living objects entering the wireless charging region. Existing studies mainly focused on the presence/absence detection of living objects, but lacked research on multiple object detection and moving trajectory track, which are both benefit for practical applications. This paper develops a 77GHz millimeter-wave radar-based moving foreign object detection method based on Kalman filter and data association algorithms. Simulation and experiments are both implemented to verify the effectiveness of the proposed method.
Firstly, principle of the frequency modulated continuous wave radar is introduced. Formulations for calculating distance, velocity, and angle, are deduced. Secondly, a method that combines a Kalman filter with target clustering and data association algorithms is developed to track the moving trajectories of multiple objects. In particular, the Kalman filter is employed to reduce the influence of measurement noises. The DBSCAN algorithm is used for target clustering. The joint probabilistic data association algorithm is utilized to track multiple object trajectories. Finally, the proposed method is evaluated with simulation and experiments on TI IWR1642 77GHz radar in terms of measurement accuracy and multiple objects track.
The results show that the proposed method can simultaneously measure the distance, velocity, angle, and number of moving objects with an average distance error of 2cm. Particularly, it can distinguish multiple objects that are very close to each other. With the DBSCAN algorithm, the proposed method can cluster five simulated objects with a maximum error of 3cm, and average errors of 0.63cm, 0.66cm, 0.48cm, 0.60cm, and 0.71cm, respectively. In addition, the proposed method is able to track the trajectories of the five objects within 15 calculating cycles, and the average errors are 0.35cm, 0.39cm, 0.39cm, 1.2cm, and 0.92cm, respectively. Also, experimental results indicate that the proposed method can track the moving object with a position error band of 5cm.
Conclusions of the paper can be summarized as follows: ① The proposed method is able to detect the position and velocity of moving foreign objects accurately, and the maximum error for distance measurement is within 2cm. ② The proposed method can realize presence detection and trajectory track of multiple adjacent moving objects. ③ With the capability of moving object track, the proposed method is valuable for improving reliability of living object detection, and realizing more reasonable protection. For instance, the wireless charging system can determine to lower or close the output power by considering the position range and moving trend of objects.
Keywords:Electric vehicle wireless charging, living object detection, millimeter-wave radar, Kalman filter, trajectory tracking
中图分类号:TM724
DOI: 10.19595/j.cnki.1000-6753.tces.211570
广东省重点领域研发计划资助项目(2020B0404030004)。
收稿日期 2021-10-07
改稿日期 2021-11-30
E-mail: ytian@szu.edu.cn
田劲东 男,1973年生,教授,研究方向为光学检测技术及其应用。
E-mail: jindt@szu.edu.cn(通信作者)
(编辑 郭丽军)