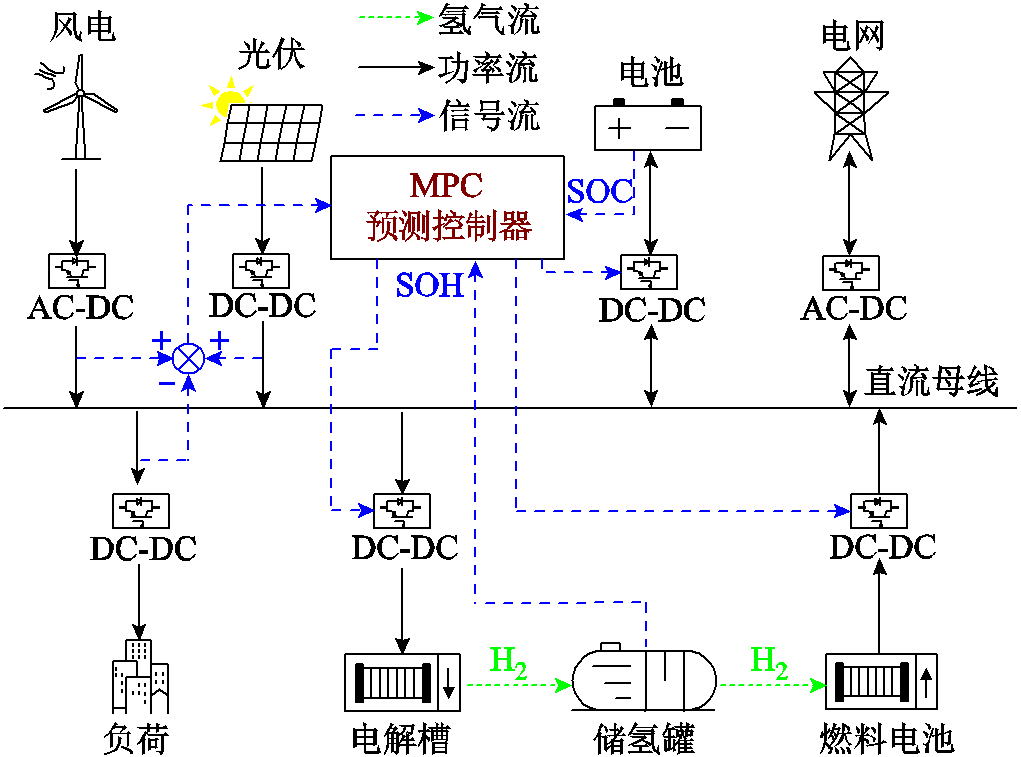
图1 风-光-储-氢耦合系统结构
Fig.1 Wind-photovoltaic-storage-hydrogen coupling system structure
摘要 该文针对风-光-储-氢系统中风光的波动性、储氢的动态响应特性,实时在线优化匹配储-氢功率与风-光功率问题,提出基于权重调节模型预测控制(MPC)的风-光-储-氢耦合系统在线功率调控方法。文中构建了风-光-储-氢耦合能源系统拓扑结构,建立了耦合系统状态空间模型,以耦合系统功率平衡为目标,以制氢功率、燃料电池功率和电池功率为控制变量,根据氢储能和电池储能的特性及各约束条件将目标函数转换为二次规划问题进行求解,并在自定义s-函数建立的MPC控制器中依据复合储能系统的状态信息对权重因子进行调节,实现了控制器的参数自适应,最后完成了功率控制层与能量管理层的闭环仿真。通过仿真分析,对比三种调控方法,验证了该文所提基于变权重MPC功率调控方法的有效性和优越性。
关键词:风-光-储-氢耦合系统 权重调节 模型预测控制 功率调控 闭环仿真
2021年10月,国务院印发《2030年前碳达峰行动方案》,方案提出在“十四五”期间要加快新型电力系统的构建,推动能源绿色低碳转型,确保2030年前实现碳达峰目标。因此,大力发展以风电和光伏为代表的新能源是实现“双碳”目标的必经之路,是构建新型电力系统的当务之急[1-4]。同时,氢能作为一种新兴的电力系统储能方式,具有绿色低碳、功率和能量可分开设计的特点,并具有长期大容量能量存储潜力,故将电-氢储能进行协调配合可以提高对可再生能源的消纳能力及电网的调节能力。因此风-光-储-氢耦合系统的开发利用将成为充分利用风光资源的优选方案之一[5-13]。目前可再生能源的研究主要以风光发电为主,由于受季节性和天气的影响,风光发电具有间歇性和不确定性,加之负荷的随机性,使得源-储-荷在功率动态平衡方面研究的重要性逐渐体现。由于在风-光-储-氢系统中各单元工作状态不尽相同,电池储能的寿命受到循环次数的限制,因此电池储能不适用于深度充放电的转换;氢气罐作为氢气的存储容器对于储氢水平也有着较高的要求,可见在平抑由负荷变化及风光发电系统引起的功率波动时,不仅要兼顾考虑各储能元件的功率约束条件,而且也要考虑电池的荷电水平和储氢罐的储氢含量满足在正常区间内。因此提高系统的动态功率平衡能力、增强氢储系统的安全性与电储系统的可靠性是目前风-光-储-氢耦合系统亟须解决的问题。
国外对风-光-储-氢能源耦合系统运行的优选方法进行了大量研究。西班牙学者P. García等针对风-光-储-氢系统采用了自适应神经模糊推理方法,结合并网功率约束、氢气罐液位、电池荷电状态(State of Charge, SOC)提出了基于自适应神经模糊系统(Adaptive Network-based Fuzzy Inference System, ANFIS)的并网能量管理策略[14]。文献[15]采用两级转换器将风光系统和电池集成,与光伏组件接口的DC-DC转换器采用基于模型预测控制(Model Predictive Control, MPC)的最大功率点跟踪(Maximum Power Point Tracking, MPPT)方法。文献[16]介绍了一个位于加拿大萨尼亚地区的风-光-储-氢可再生能源混合系统,针对电解槽和燃料电池的优化运行设计了模型预测控制器,以实现更好的功率管理。F. R. S. Sevilla等学者将模型预测方法应用到含有电转气装置的混合能源系统中,通过氢气储能提高了夏季光伏的利用率,在瑞士引起了广泛的关注[17]。文献[18-19]提出了基于MPC方法的并网系统能量管理策略,该方法有效地提高了可再生能源的利用率并减少了电网的电力消耗。国内也有很多学者展开了研究,蔡国伟等构造了一种风电/制氢/燃料电池/超级电容器,其耦合于直流母线的结构,基于规则的控制,根据电容器的荷电状态及功率约束条件获得10种运行模式,确保了功率的协调流动[20]。文献[21]在此基础上考虑了储氢罐压力,实现了风光氢系统的在线能量调控。新疆大学邓浩等针对风-储-氢系统考虑了燃料电池和电解槽的响应延迟问题,结合超级电容的荷电状态,提出了含有8种运行模式的能量管理控制策略[22]。
上述研究均对混合能源系统的功率调控有着重要意义。文献[20-22]中基于规则的控制策略逻辑简单且便于实现,能够实现系统功率的动态平衡,减小风电、光伏随机性与波动性对系统的影响,但是基于规则控制策略的好坏取决于规则的设定,因此会存在弃风、弃光现象,从而导致可再生能源不能得到充分的利用。文献[14]中基于模糊控制的调控方法不需要被控对象模型和输入输出关系,但是模糊控制的设计依赖设计者的经验,因此其准确性受到影响。针对混合能源系统储能对象不单一、约束条件较为复杂的特点,更多学者将模型预测方法应用到功率调控中[17-19]。但是文献[17]对于电转气装置没有考虑电-氢和氢-电转换电气特性上的不同,且在控制器中在同一时间只有一种储能方式参与功率调节。文献[19]针对不同情景进行了验证,但是在每种情景采用了固定权重作为分配原则。文献[23]在电氢耦合系统中应用的模型预测控制可以处理多变量问题,具有优越的在线优化性能,但是只考虑了在能量管理层进行模拟而未结合功率控制层进行闭环仿真。
从当前的研究结果可以看出,MPC算法已在能量管理策略中得到初步应用,但研究人员都没有依据复合储能系统的状态变量信息对权重因子进行调节,而复合储能系统的状态变量与权重调节对耦合系统的储能功率分配有着重大的影响。因此基于电池荷电状态(SOC)与储氢罐荷氢水平(State of Hydrogen, SOH)信息提出了权重可调节的MPC方法。本文的主要贡献在于使得耦合能源系统与电网交互功率最小,在混合储能装置得到充分利用的同时增强了氢储系统的安全性与电储系统的可靠性。为了增强可控功率设备的可靠性,本文根据9种运行模式设定了权重因子的变化规则。首先构建耦合能源系统拓扑结构,在自定义s-函数模块模拟的MPC控制器中建立状态空间方程,以耦合能源系统与电网交互功率最小为目标函数,并进行优化问题的求解;然后将能量管理层产生的功率输入到功率控制层进行闭环仿真,实现风-光-储-氢耦合系统的在线能量调控;最后定义相关指标评价不同控制策略的效果,验证本文所提策略的有效性。
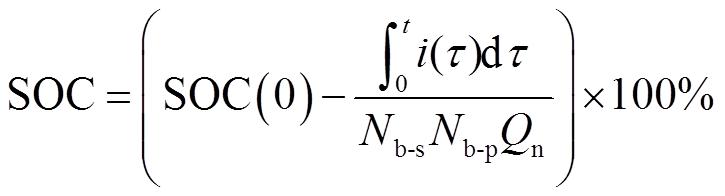
风-光-储-氢耦合系统结构如图1所示。系统由风电、光伏、电解槽、储氢罐、燃料电池、电池、负荷及电网构成。风电、光伏为本系统的主要能量来源,直流母线电压由电网维持稳定,MPC控制器将电储能和氢储能的功率进行在线调控分配。当风电、光伏出力大于负荷需求时,控制系统启动电池DC-DC变流器和电解槽DC-DC变流器,多余功率由电池和电解槽吸收,电解槽通过电解水制氢将电能以氢能形式存储,若电池SOC和储氢罐SOH均达到上限,此时电池和电解槽停止工作,系统剩余功率由电网消纳;当风电、光伏出力小于负荷需求时,控制系统启动电池DC-DC变流器和燃料电池DC-DC变流器,缺额功率由电池和燃料电池供给,燃料电池通过消耗氢气来供电,若电池SOC和储氢罐SOH均到达下限,此时电池和燃料电池停止工作,电网为系统提供缺额功率。
图1 风-光-储-氢耦合系统结构
Fig.1 Wind-photovoltaic-storage-hydrogen coupling system structure
风电机组机械功率[21]为
 (1)
(1)
式中,ρair为空气密度;Rw为风轮机叶轮半径;Cp为叶片的风能转换效率系数;vw为风速。
光伏阵列U-I方程为
 (2)
(2)
式中,Npv_p与Npv_s分别为光伏阵列中光伏组件并联数和串联数;Isc为短路电流;Uoc为开路电压;C1、C2为修正系数[19]。
本文电解采用碱式电解模型,则电解槽数学模型[21]可表示为
式中,Uel为电解槽输出电压;Nel为电解槽串联个数;Iel为直流电流;ΔG为电化学反应过程的Gibbs自由能变;z为每次反应电子转移数;F为法拉第常数;r1、r2为电解液欧姆电阻参数;Tel为电解槽温度;Acell为电解模块面积;si和ti均为电极过电压系数,i=1, 2, 3。
电解槽的产氢速率可以根据法拉第定律获得,其数学模型可表示为
 (4)
(4)
式中, 为电解槽产氢速率;
为电解槽产氢速率; 为法拉第效率。
为法拉第效率。
本文燃料电池采用质子交换膜燃料电池(Proton Exchange Membrane Fuel Cell, PEMFC),其数学模型[21]可表示为
 (5)
(5)
 (6)
(6)
式中,Ufc为PEMFC电池组电压;Ifc为燃料电池电流;Nfc为燃料电池串联个数;Enernst为热力学电动势;Uact为活化过电压;Uohm为欧姆过电压;Uconc为浓度差过电压; 为燃料电池耗氢速率。
为燃料电池耗氢速率。
储氢罐的氢气含量取决于电解槽的产氢速率和燃料电池的耗氢速率,这里认为储氢模型为理想模型,不存在氢气泄漏的情况,其模型[21]可表示为
 (7)
(7)
 (8)
(8)
式中, 为
为 时刻储氢罐净储氢率;
时刻储氢罐净储氢率; 和
和 分别为时刻电解槽产氢速率和燃料电池耗氢速率;nsto(t0)为t0时刻氢罐储氢含量。
分别为时刻电解槽产氢速率和燃料电池耗氢速率;nsto(t0)为t0时刻氢罐储氢含量。
储氢罐的荷氢水平可以根据理想气体状态方程获得,其数学模型为
 (9)
(9)
式中,R为气体常数;Tsto为储氢罐温度;Vsto为储氢罐体积;psto_max为储氢罐压力上限。
电池数学模型[21]可表示为
 (11)
(11)
式中,E为电池电动势;SOC为电池荷电状态;E0为初始内电动势;K为极化电压常数;Au为电压变化系数;Bc为容量变化系数;Qn为电池额定容量;i(τ)为充放电电流;Ct为极化效应系数;Tb为电池温度;SOC(0)为电池荷电状态初值;Nb-s和Nb-p分别为电池组中电池串联和并联个数。
风电、光伏、电解槽、燃料电池、电池、负荷及电网通过变流器汇集于直流母线,各单元变流器控制策略如图2所示。
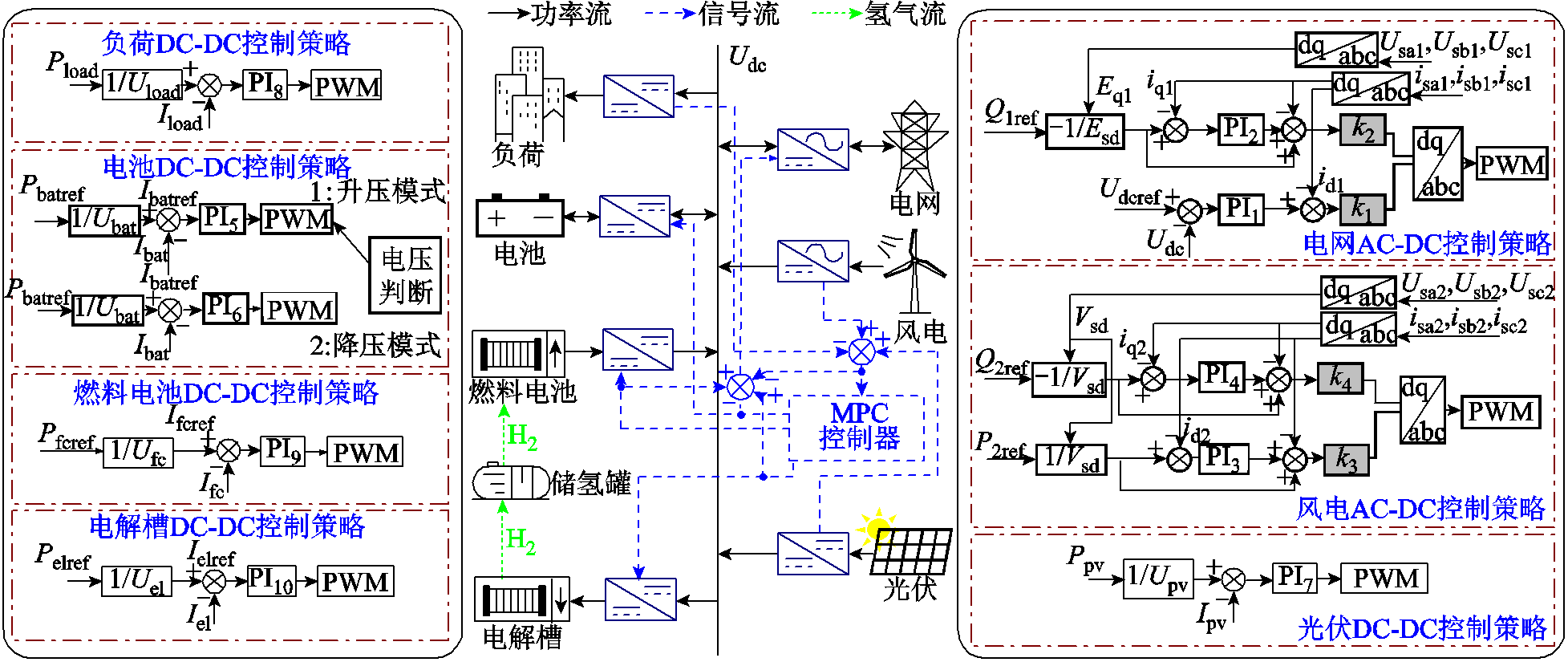
图2 系统各单元变流器控制策略
Fig.2 Converter control strategy diagram of each unit of the system
基于反馈线性化方法完成定有功功率和定无功功率的非线性解耦控制,其中电网无功功率参考值Q1ref=0,风电无功功率参考值Q2ref=0。整个系统分为内环和外环控制,内环控制解决电流的快速跟踪控制问题,外环控制用于确定id和iq参考值的大小。
由MPC控制器计算获得电解槽参考功率Pelref,Pelref与电解槽端电压Uel相除产生电流参考值Ielref,电流参考值Ielref与电流实际值Iel的误差经过PI控制产生控制信号。
由MPC控制器计算获得燃料电池参考功率Pfcref,Pfcref与燃料电池电压Ufc相除产生电流参考值Ifcref,电流参考值Ifcref与电流实际值Ifc的误差经过PI控制产生控制信号。
光伏系统采用单向DC-DC控制器,其控制结构如图2所示。
电池采用双向DC-DC控制器,由MPC控制器计算获得参考功率Pbatref,Pbatref与电池电压Ubat相除,产生的电流参考值Ibatref与Ibat的误差经过PI控制产生控制信号。
权重可调节MPC的功率调控方法如图3所示。该方法是基于闭环控制的功率调控方案,能够随着系统的变化实现在线动态调整可控能源设备的功率。
图3 风-光-储-氢在线能量调控方法框图
Fig.3 Framework of on-line energy regulation method for wind-photovoltaic-hydrogen-storage
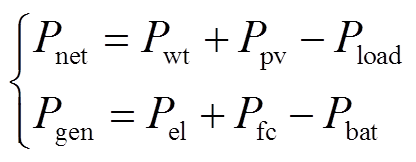
风-光-储-氢耦合系统功率平衡方程可表示为
 (12)
(12)
式中,Pwt与Ppv分别为风电和光伏的有功功率;Pbat、Pfc和Pel分别为电池、燃料电池和电解槽的有功功率;Pload为负荷需求功率;Pgrid为电网与耦合系统的交互功率。本文参考功率方向选取规则为:Pfc<0表示燃料电池发出功率,Pbat>0表示电池发出功率,Pel>0表示电解槽吸收功率,Pgrid>0表示电网从耦合系统中吸收电能。
净功率与可控能源设备产生的功率可以分别表示为
 (13)
(13)
式中,Pnet为净功率,是可再生能源与负荷需求之间的差额;Pgen为可控能源设备产生的功率。Pnet可能会出现正、负、零三种情况,当Pnet=0时,风电、光伏产生的电能恰好满足负荷的需求;当发电能力过剩(Pnet>0)时,燃料电池停止工作,若电池SOC和储氢罐SOH均在约束范围内,则由电解槽和电池吸纳剩余功率;当发电能力不足时(Pnet<0)时,电解槽停止工作,若电池SOC和储氢罐SOH均在约束范围内,则由燃料电池和电池提供缺额功率。
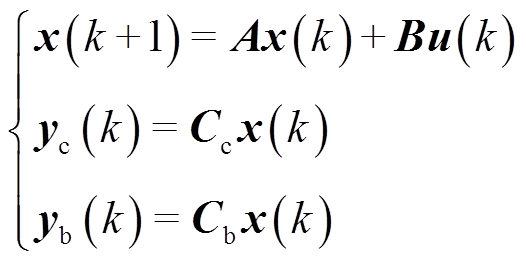
线性离散系统状态空间表达式为
 (14)
(14)
式中,k为当前时刻;k+1为下一时刻;x为状态变量;u为控制变量; 为被控输出变量;
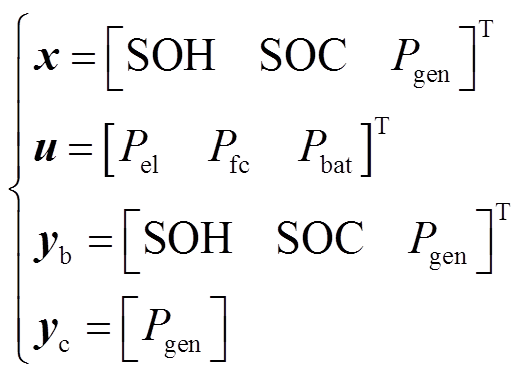
为被控输出变量; 为约束输出变量;A与B分别为系统矩阵和控制矩阵;Cc为被控输出矩阵;Cb为约束输出矩阵。本文选取储氢罐SOH、电池SOC、可控能源功率Pgen作为状态变量,选取电解槽功率Pel、燃料电池功率Pfc、电池功率Pbat作为控制变量,选取储氢罐SOH、电池SOC、可控能源设备功率Pgen作为约束输出,选取可控能源设备功率Pgen作为被控输出。则该系统状态变量、控制变量、输出变量矩阵表示为
为约束输出变量;A与B分别为系统矩阵和控制矩阵;Cc为被控输出矩阵;Cb为约束输出矩阵。本文选取储氢罐SOH、电池SOC、可控能源功率Pgen作为状态变量,选取电解槽功率Pel、燃料电池功率Pfc、电池功率Pbat作为控制变量,选取储氢罐SOH、电池SOC、可控能源设备功率Pgen作为约束输出,选取可控能源设备功率Pgen作为被控输出。则该系统状态变量、控制变量、输出变量矩阵表示为
 (15)
(15)
系统矩阵、控制矩阵、被控输出矩阵和约束输出矩阵分别表示为

其中
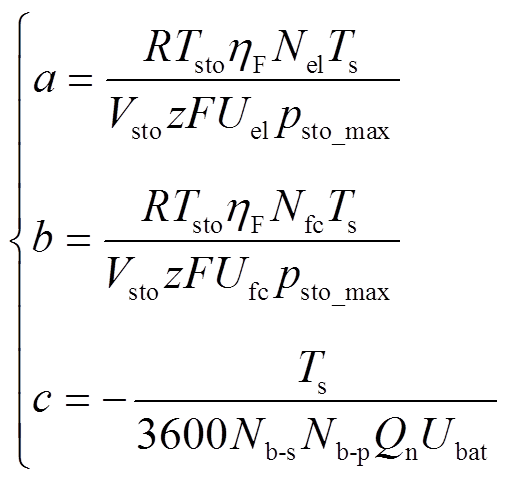 (16)
(16)
式中,Ts为系统采样时间。
风-光-储-氢耦合系统功率目标函数为
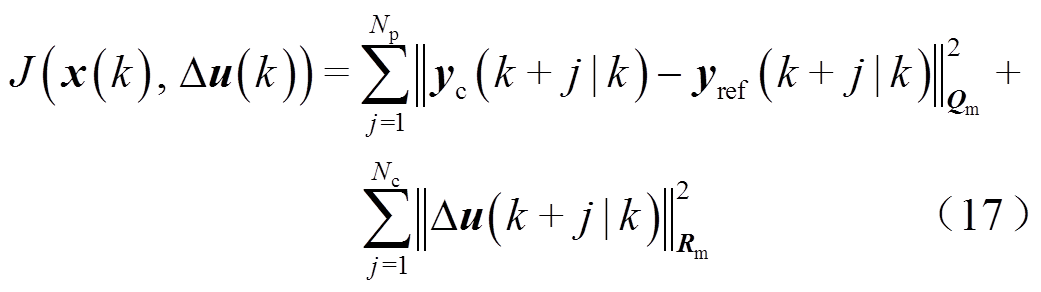
其中
 (18)
(18)
式中,k+j|k表示k时刻对k+j时刻的预测;yref为给定的参考轨迹;Δu为控制变量的增量;Np为预测时域;Nc为控制时域;Qm为对输出误差的加权矩阵;b为预测控制输出误差的加权因子;Rm为对控制增量的加权矩阵;li(i=1, 2, 3)为控制增量的加权因子,l1、l2、l3分别为对电解槽功率Pel、燃料电池功率Pfc、电池功率Pbat的重视程度[24]。本文选取净功率Pnet作为参考轨迹yref(k+ j|k),控制目标是被控输出Pgen跟踪给定的参考输入Pnet。
可控能源设备功率约束条件为
 (19)
(19)
电池SOC及储氢罐SOH约束条件为
 (20)
(20)
控制增量约束条件为
 (21)
(21)
式中,下标“max”和下标“min”分别代表对应变量上、下限。
将电-氢混合储能进行协调配合可以有效提高储能单元对可再生能源的消纳,减少对电网的冲击。考虑到电池深度充放电对其循环次数及寿命的影响,故本文将电池SOC状态范围划分为安全区间和缓冲区间;考虑到氢气罐作为氢气的存储容器对于储氢水平也有着较高的要求,因此将储氢罐SOH状态范围也分为安全区间和缓冲区间。MPC控制器权重工况如图4所示。图中,SOC_op1、SOC_op2分别为电池安全区间下限、电池安全区间上限;SOH_op1、SOH_op2分别为储氢罐安全区间下限、储氢罐安全区间上限。
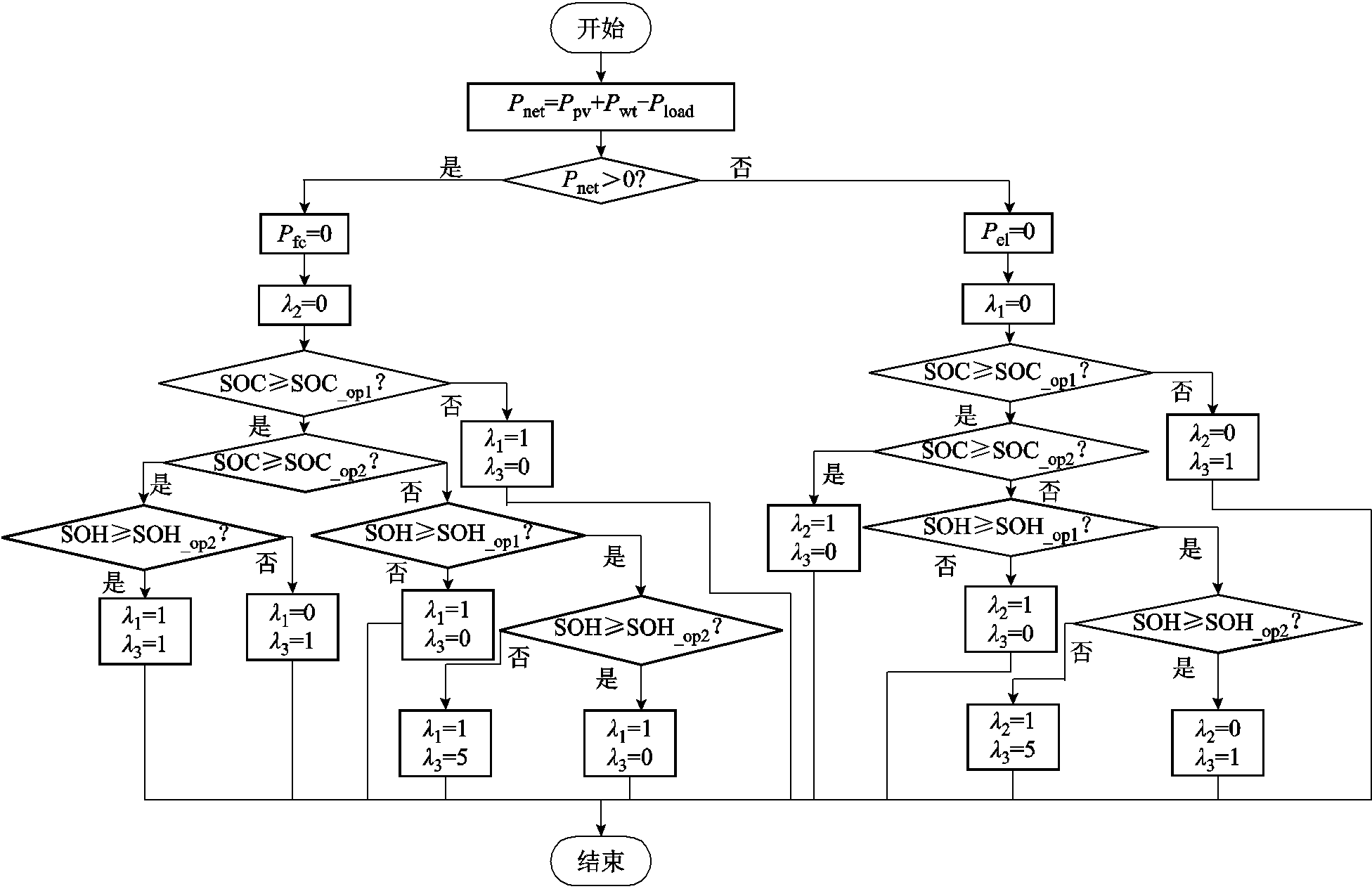
图4 MPC控制器权重取值工况
Fig.4 MPC controller weight value condition
对于输出误差的加权矩阵Qm,若加权因子β越大,表明对应的控制输出越接近给定的参考输入,当加权因子β增加到一定数值时,曲线跟踪效果不会再发生明显提升。本文重点是对控制增量的加权矩阵Rm进行分析,控制增量加权因子li越大,表明对应的控制动作变化越小[23]。当净功率Pnet>0时,系统存在剩余功率,此时燃料电池发出功率为0,对应于l2=0,电解槽与电池吸收的功率取决于l3、l1;当净功率Pnet<0时,系统存在缺额功率,此时电解槽吸收功率为0,对应于l1=0时,燃料电池与电池发出的功率取决于l3、l2。
情况1:若满足
 (22)
(22)
若Pnet>0,电池被充电,电解槽和燃料电池不工作,令权重矩阵Rm=diag[1 0 0];若Pnet<0,燃料电池放电,电解槽和电池不工作,令权重矩阵Rm=diag[0 0 1]。
情况2:若满足
 (23)
(23)
在此情况下,操作与情况1相同。
情况3:若满足
 (24)
(24)
若Pnet>0,电池和电解槽同时继续吸收功率直至饱和,令权重矩阵Rm=diag[1 0 1];若Pnet<0,则电池优先输出功率,令权重矩阵Rm=diag[0 1 0]。
情况4:若满足
 (25)
(25)
此时与情况1相同。
情况5:若满足
 (26)
(26)
若Pnet>0,燃料电池不工作,电池和电解槽同时吸收功率,设置电解槽承担较多的不平衡功率,令权重矩阵Rm=diag[1 0 5];若Pnet<0,电解槽不工作,电池和燃料电池同时发出功率,设置燃料电池承担较多的不平衡功率,令Rm=diag[0 1 5]。
情况6:若满足
 (27)
(27)
若Pnet>0,电解槽工作,电池和燃料电池不工作,令权重矩阵Rm=diag[0 0 1];若Pnet<0,电池发电,电解槽和燃料电池不工作,令权重矩阵Rm=diag[0 1 0]。
情况7:若满足
 (28)
(28)
若Pnet>0,令电池优先充电到正常区间,然后电解槽再恢复储氢工作,权重矩阵Rm=diag[1 0 0];若Pnet<0,燃料电池先发电直至SOH为0,然后电池开始放电,令权重矩阵Rm=diag[0 0 1]。
情况8:若满足
 (29)
(29)
在此情况下,操作与情况6相同。
情况9:若满足
 (30)
(30)
在此情况下,操作与情况6相同。
含有约束MPC的优化问题可以转换为二次规划问题,求解步骤如下所示。
1)设置MPC算法采样时间Ts、预测时域Np、控制时域Nc、输出误差的加权矩阵Qm、控制增量的加权矩阵Rm。
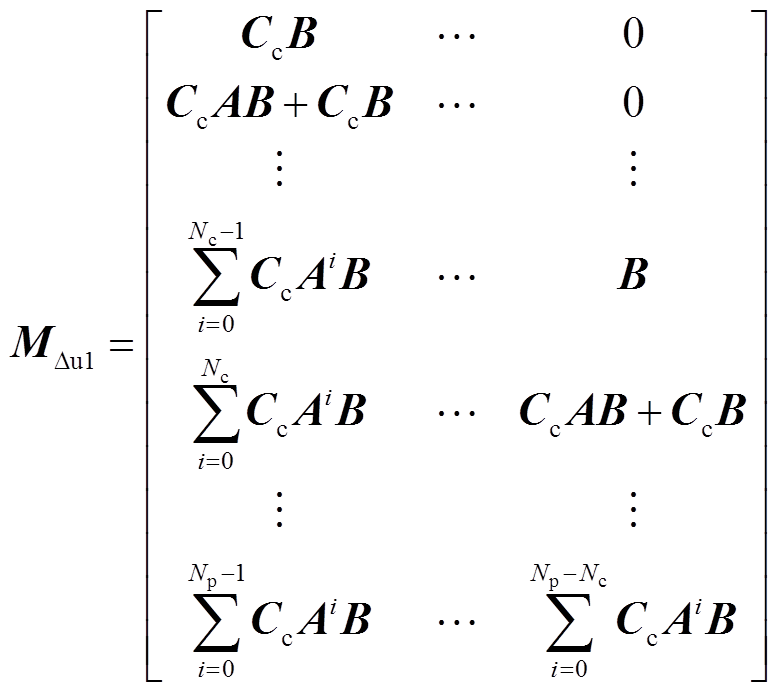
2)计算MPC算法中应用到的系数矩阵A、B、Mx1、Mu1、MΔu1、H、f。
其中,定义向量分别为
 (31)
(31)
 (32)
(32)
 (33)
(33)
耦合系统目标函数向量形式为
 (34)
(34)
故原优化问题转换为
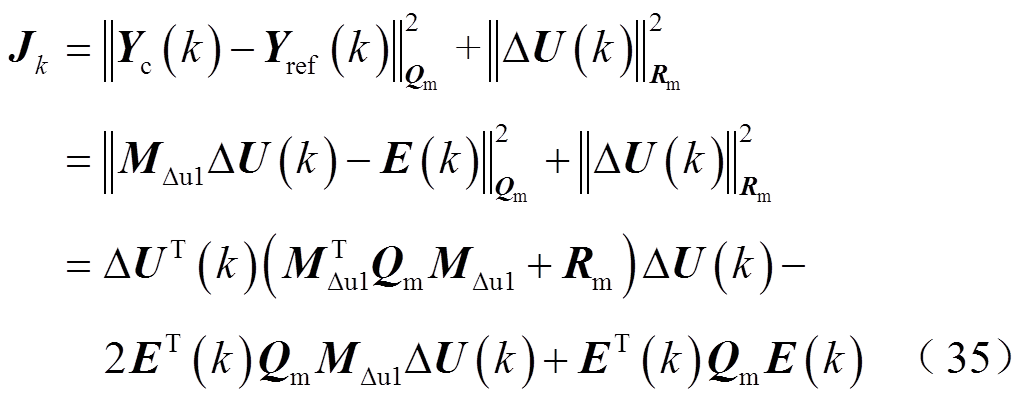
其中
 (36)
(36)
式中,ΔU(k)在解决优化问题时可以作为独立变量。由于 是与控制变量无关的量,故将其舍去。则该问题的标准二次规划形式可以写为
是与控制变量无关的量,故将其舍去。则该问题的标准二次规划形式可以写为
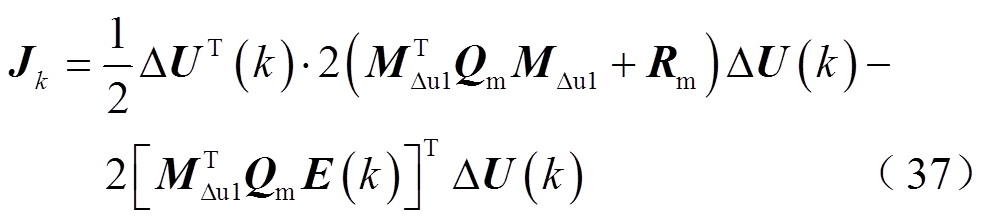
由式(37)可知矩阵H和f分别为
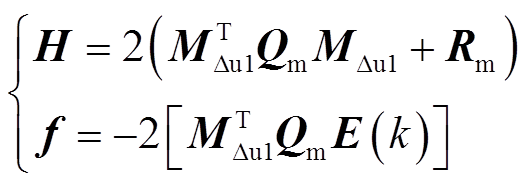 (38)
(38)
3)采用Matlab工具箱中的quadprog函数求解MPC问题的最优解,获得使得目标函数最小的ΔU(k),进而可以求得当前时刻的控制量为
 (39)
(39)
风-光-储-氢耦合系统功率调控具体步骤如下:
1)采集状态参数,包括电解槽功率Pel、燃料电池功率Pfc、电池功率Pbat、电池SOC、储氢罐SOH、电解槽电压Uel、燃料电池电压Ufc、电池电压Ubat。
2)根据净功率、电池SOC及储氢罐SOH,由图4的9种运行情况确定MPC的权重参数。
3)求解风-光-储-氢耦合系统目标函数,可以将目标函数转换成二次规划问题并计算出当前控制增量最优序列,从而得到当前时刻控制量,输出电解槽、燃料电池及电池的参考功率。
4)系统各单元变流器执行基于PI理论的协调控制策略,如图2所示。
5)更新系统状态参数,包括电解槽功率Pel、燃料电池功率Pfc、电池功率Pbat、电池SOC、储氢罐SOH、电解槽电压Uel、燃料电池电压Ufc、电池电压Ubat。
6)判断循环次数是否达到上限,若达到仿真时长,则结束仿真;否则继续执行步骤1)~步骤5)。
利用s-函数自定义功能,在Matlab/Simulink中自定义开发模型预测控制器,如图5所示。
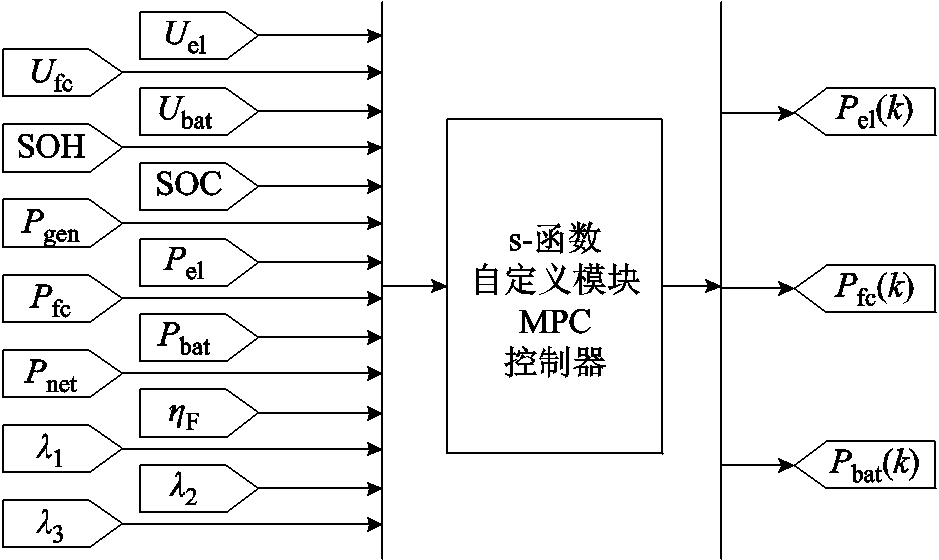
图5 自定义模型预测控制器
Fig.5 Model prediction controller
Simulink在仿真过程中反复调用s-函数,在调用过程中s-函数子程序将完成以下工作内容:
1)在仿真循环之前,Simulink初始化s-函数。其中系统有14个离散变量,输入端口有14个,分别为电解槽端电压Uel、燃料电池端电压Ufc、电池端电压Ubat、储氢罐SOH、电池SOC、可控能源功率Pgen、电解槽功率Pel、燃料功率Pfc,电池功率Pbat、净功率Pnet、电解槽工作效率hF、控制变量的权重因子li(i=1,2,3);输出端口有3个,分别为协调控制策略中可控能源的参考功率,即电解槽功率Pel(k)、燃料功率Pfc(k),电池功率Pbat(k)。
2)计算每个输出端口的输出值Pel(k+i)、Pfc(k+ i)、Pbat(k+i)。
3)调用mdlUpdate函数,此过程在每个采样时间都要执行一次,为当前的仿真循环更新离散状态。
本文采用MW级别机组作为算例基础,各机组通过不同的变换电路耦合于直流母线,被控直流母线电压为1.1 kV,系统结构如图1所示。系统控制器参数及系统参数分别见附表1和附表2。MPC控制器每0.1 s进行一次采样,MPC算法中预测时域Np=5,控制时域Nc=4。本文仿真时长为12 s,系统风电、光伏、负荷及净功率曲线如图6所示。
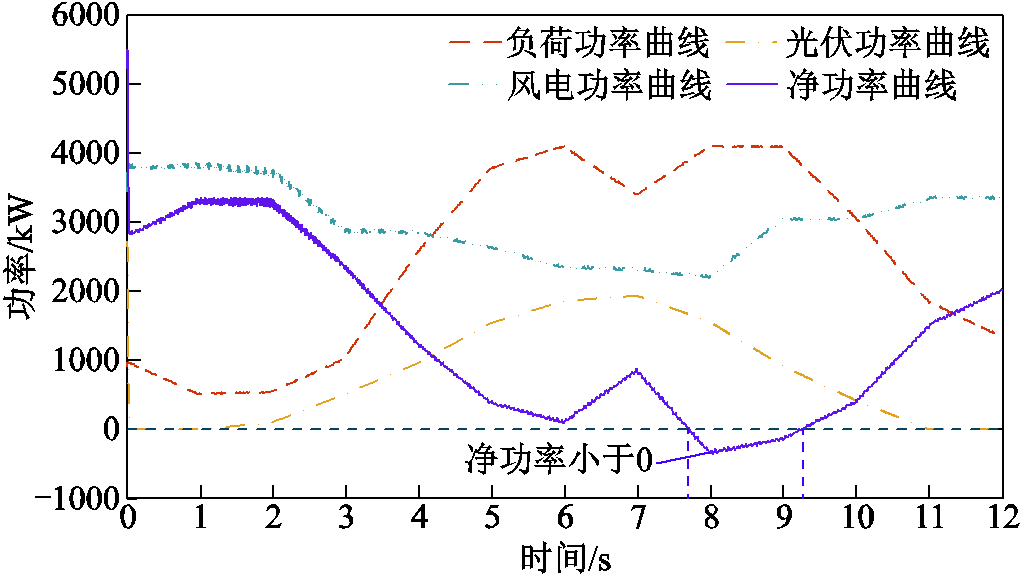
图6 新能源及负荷功率曲线
Fig.6 New energy and load power curve
本文采用Matlab/Simulink仿真软件搭建了风-光-储-氢耦合系统的仿真模型,为了验证本文所提策略的有效性,选取三种不同场景进行分析研究,每种场景将状态控制、固定权重MPC、可调节权重MPC下的电解槽功率Pel、燃料电池功率Pfc、电池功率Pbat、电池SOC和储氢罐SOH进行对比分析。本文采用的状态控制策略如附图1所示,为了避免储能在进行充放电后超限,因此对SOC和SOH的状态信息进行控制,附图1中显示了不同的操作状态S1~S8。
4.3.1 电池处于深度充电区域下的仿真验证
设置SOC初始值为0.89,SOH初始值为0.5,MPC固定权重设定Rm=diag[1 1 5]。系统功率仿真结果如图7~图9所示。
在MPC中,MPC控制器的采样时间为0.1 s,由MPC控制器输出的Pel、Pfc及Pbat每间隔0.1 s进行一次预测。MPC控制器将输出的控制量作为风-光-储-氢耦合系统可控能源设备的参考功率,由图7~图9中MPC下的曲线可知,经过图2所示的变流器协调控制后,输出的电解槽功率、燃料电池功率、电池功率也间隔0.1 s对新预测参考值进行跟踪,且跟踪效果良好。
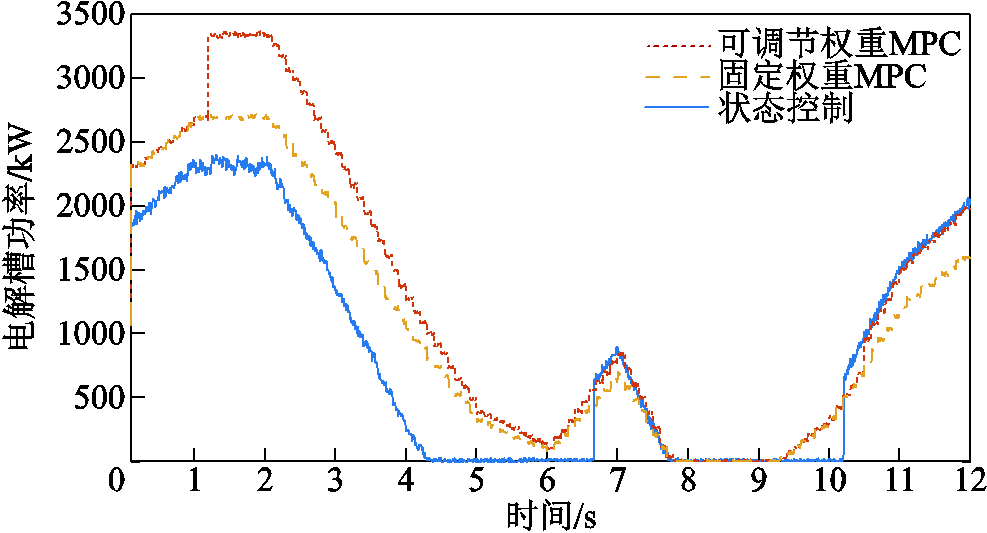
图7 电池深度充电时电解槽功率对比结果
Fig.7 Comparison results of electrolytic cell power during deep battery charging
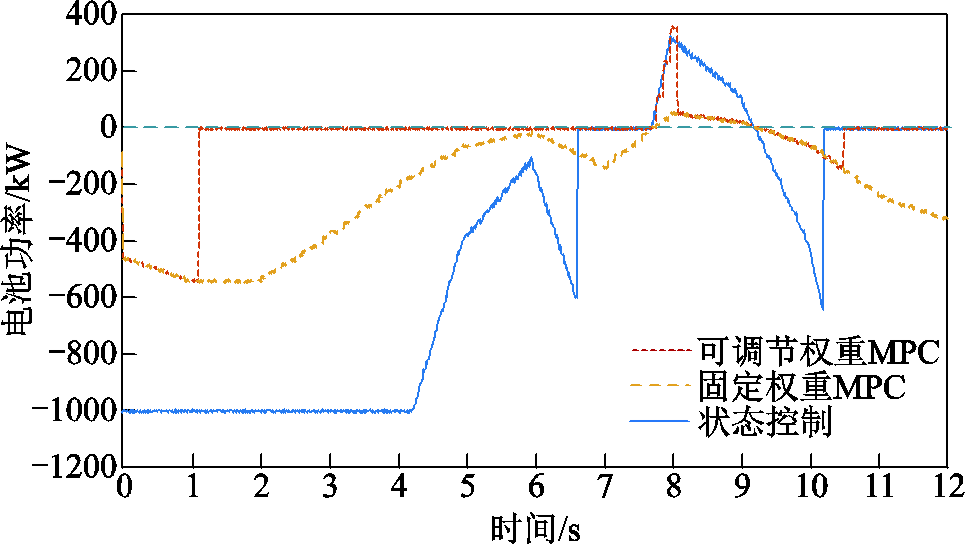
图8 电池深度充电时电池功率对比结果
Fig.8 Comparison results of battery power during deep battery charging
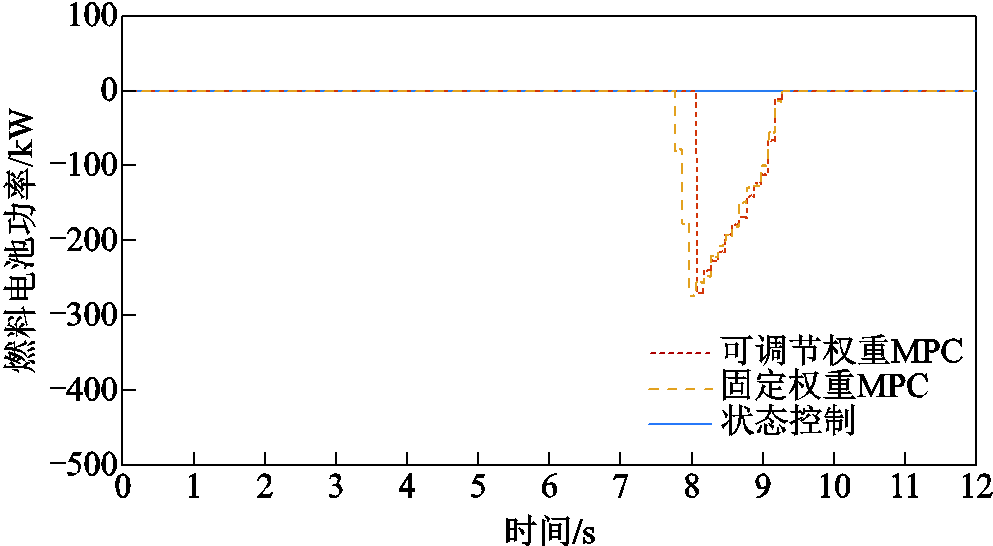
图9 电池深度充电时燃料电池功率对比结果
Fig.9 Comparison results of fuel cell power during deep battery charging
0~7.7 s、9.2~12 s内系统存在剩余功率,此时燃料电池停止出力。0~4.2 s状态控制工作在方式S7,电池以额定功率吸收功率,未完全消纳的功率则被电解制氢存储到氢气罐中。4.2~6.6 s、9.2~10.2 s状态控制工作在方式S7,系统中的净功率完全由电池消纳。6.6~7.7 s、10.2~12 s内SOC达到上限,电池不能再吸收功率,因此状态控制工作在方式S6。7.7~9.2 s内系统存在缺额功率,此时电解槽停止出力,状态控制工作在方式S2,缺额功率完全由电池提供。固定权重MPC在0~7.7 s、9.2~12 s内总是以5:1的比例将电解槽和电池吸收功率进行分配,7.7~9.2 s内总是以5:1的比例将燃料电池和电池发出功率进行分配。可调节权重MPC中在1.2 s时进行模式切换,使得电解槽承担主要功率,SOC略有上升。7.7~8.1 s内由于SOC略微超过安全区间上限,电池开始放电从而可以快速回到安全区间。
电池深度充电时不同控制下SOH对比如图10所示。由图10可知,0~1.2 s内,SOH在三种不同控制方式作用下的变化近似相同,1.2 s后在可调节权重MPC方式中得到快速上升,由此可以看出电解槽在可调节权重MPC方法下可以得到最大利用效果。
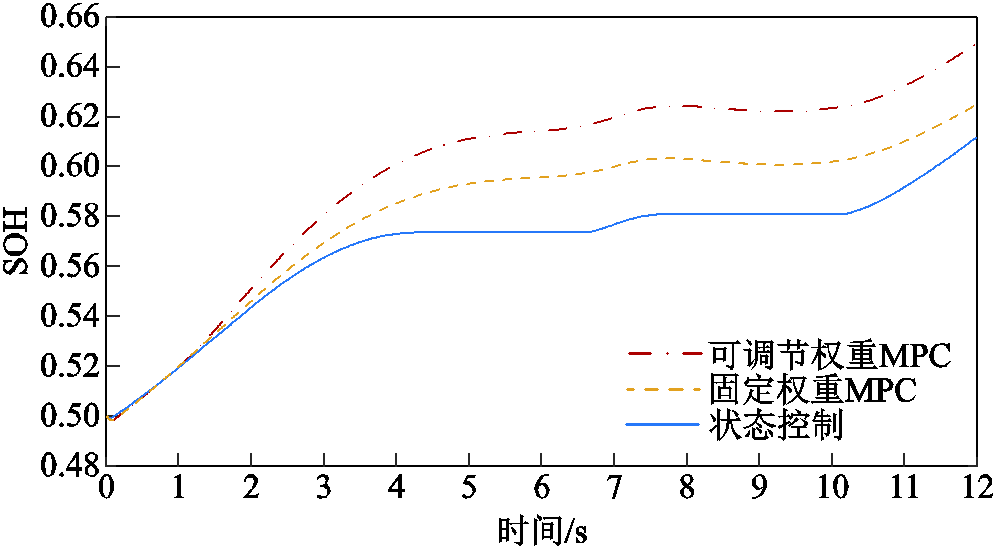
图10 电池深度充电时SOH对比结果
Fig.10 Comparison results of SOH during deep battery charging
不同控制下SOC对比如图11所示。由图11可知,0.6 s后,状态控制下的SOC已经进入电池缓冲区间,6.6 s时SOC第一次达到上限,经过短暂放电后在10.2 s时第二次达到上限。1.2 s后经过固定权重MPC的SOC进入缓冲区间,虽然在仿真时长内没有达到上限,但是也极易发生停机。1.2 s后可调节权重MPC虽然也略超过安全区间上限从而进入缓冲区间,但是8.1 s后受到净功率变化的作用,SOC开始下降,因此可调节权重MPC是三种控制中最容易回到安全区间的方式。
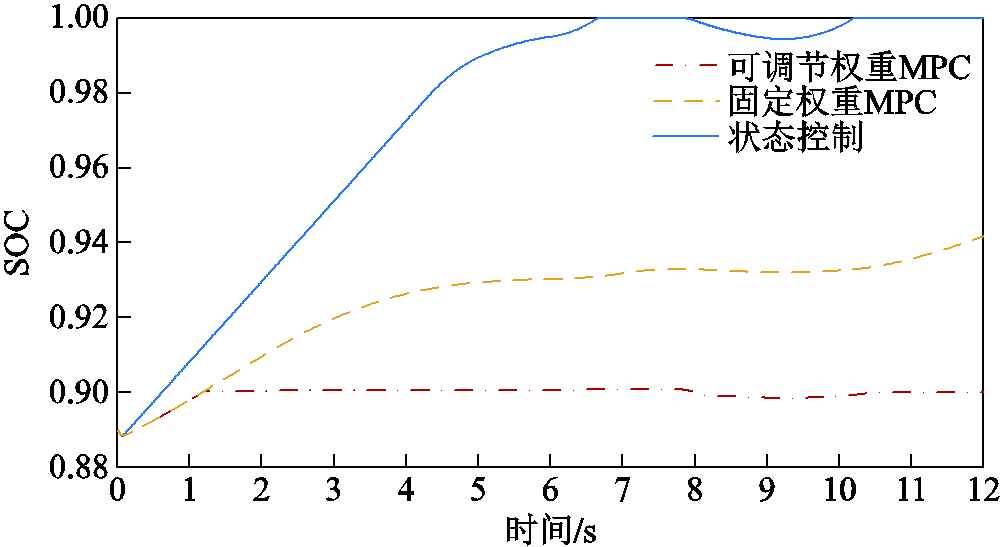
图11 电池深度充电时SOC对比结果
Fig.11 Comparison results of SOC during deep battery charging
4.3.2 电池处于深度放电区域下的仿真验证
设置SOC初始值为0.06,SOH初始值为0.5,MPC固定权重设定为Rm=diag[1 1 5]。系统功率仿真结果如图12~图14所示。
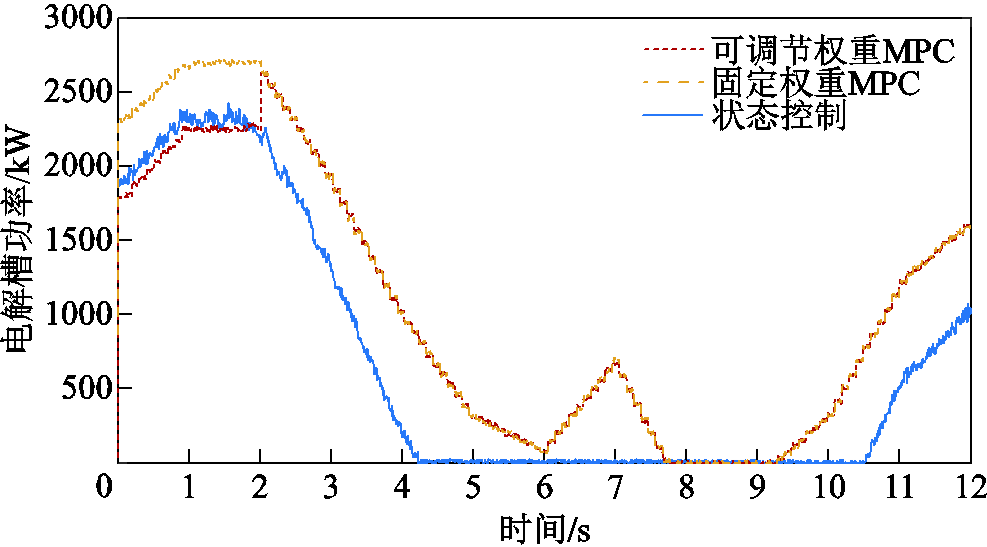
图12 电池深度放电时电解槽功率对比结果
Fig.12 Comparison results of electrolytic cell during deep battery discharging

图13 电池深度放电时电池功率对比结果
Fig.13 Comparison results of battery during deep battery discharging
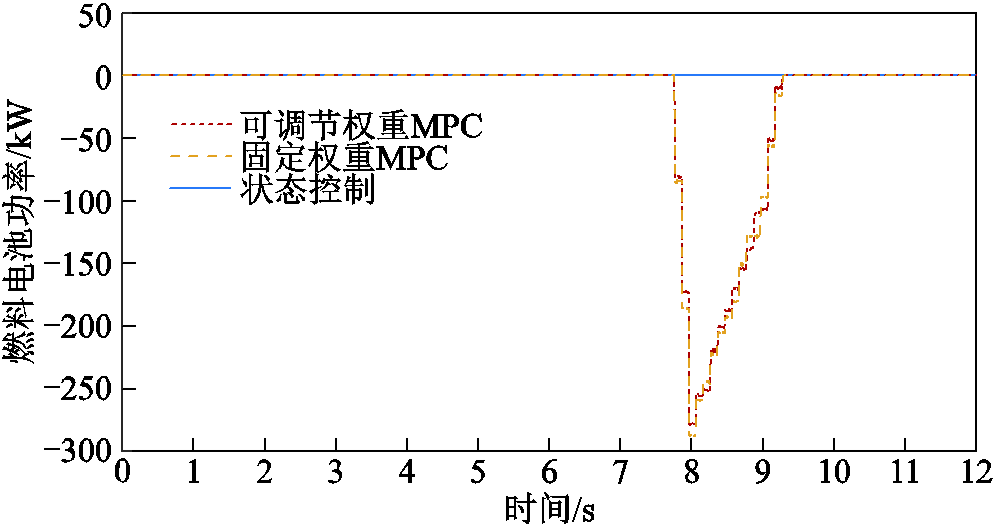
图14 电池深度放电时燃料电池功率对比结果
Fig.14 Comparison results of fuel cell during deep battery discharging
0~4.2 s、10.5~12 s内状态控制工作在方式S7,电池以额定功率出力,剩余功率则由电解槽消纳。4.2~7.7 s、9.2~10.5 s内状态控制工作在方式S7,系统净功率完全由电池消纳。7.7~9.2 s内净功率小于0,此时电解槽停止出力,缺额功率可以完全由电池提供,状态控制工作在方式S2。固定权重MPC在仿真时长内始终以5:1的比例分配氢储能与电储能获得的功率。由于电池初始荷电状态处于缓冲区间,2.1 s前可调节权重MPC应当以电池为优先原则进行充电,2.1 s后随着SOC进入安全区间,可调节权重MPC进行情况切换,此时工作情况与固定权重MPC基本相同。
电池深度放电时不同控制下SOH对比如图15所示。由图15可知,2.1 s前由于三种控制方式下的电解槽吸收功率相差不大,因此SOH没有发生明显变化;2.1 s后固定权重MPC和可调节权重MPC方式中电解槽主要承担系统中的剩余功率,因此SOH快速上升。
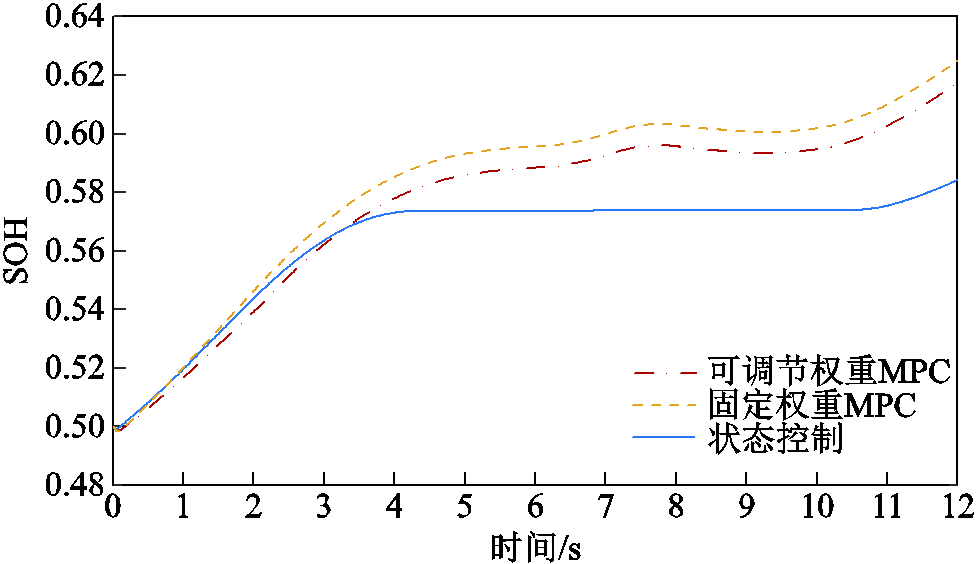
图15 电池深度放电时SOH对比结果
Fig.15 Comparison results of SOH during deep battery discharging
不同控制下SOC对比如图16所示。由图16可知,由于电池初始荷电水平处于缓冲区,2.1 s前状态控制和可调节权重MPC此时都优先给电池充电;2.1 s后使得SOC进入安全区间,而固定权重MPC在运行6 s后才脱离缓冲区间,此时两种控制均优先于固定权重MPC方式。
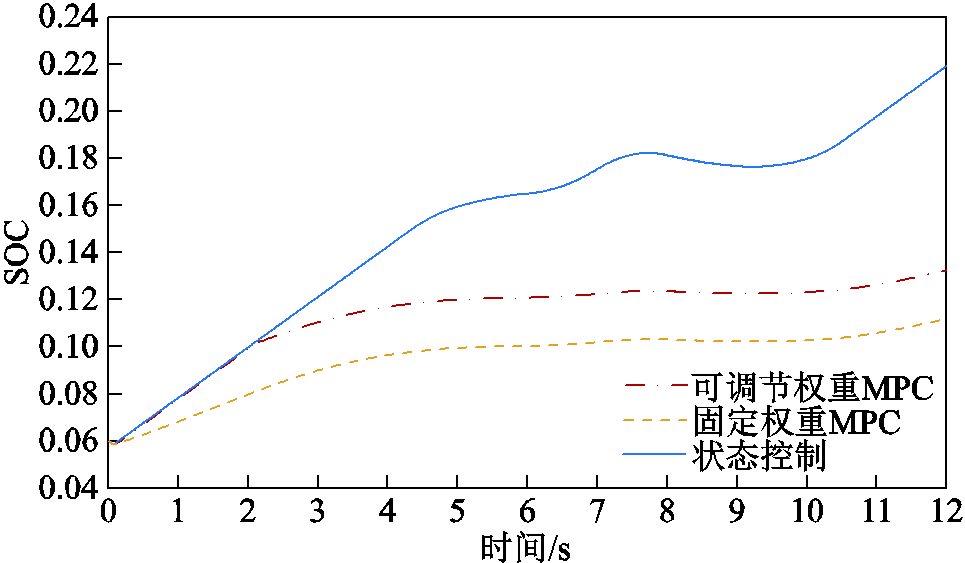
图16 电池深度放电时SOC对比结果
Fig.16 Comparison results of SOC during deep battery discharging
4.3.3 储氢量处于极端值的仿真验证
设置SOC初始值为0.5,SOH初始值为0.78,MPC固定权重设定Rm=diag[1 1 5]。系统功率仿真结果如图17~图19所示。
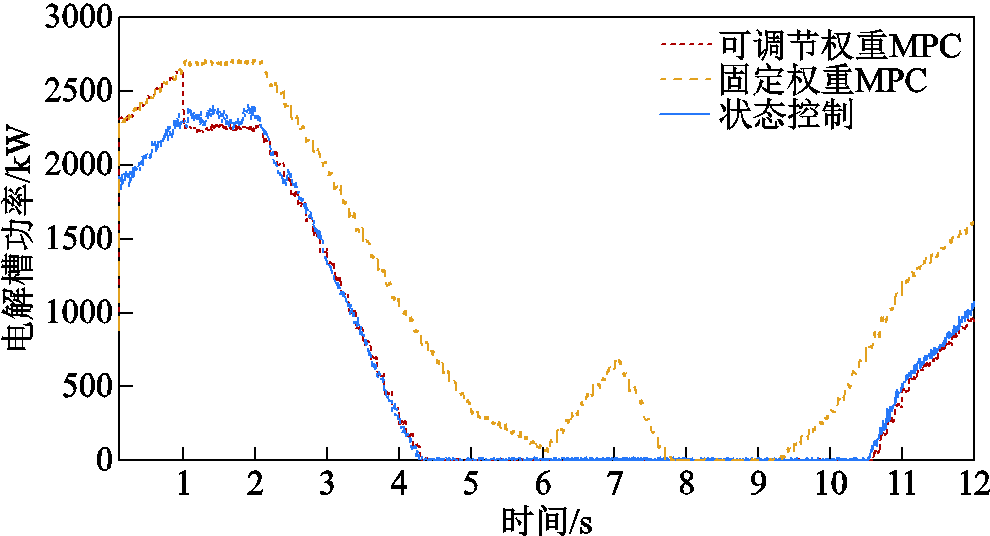
图17 储氢量处于极端值时电解槽功率对比结果
Fig.17 Comparison of electrolyzer power with extreme hydrogen storage
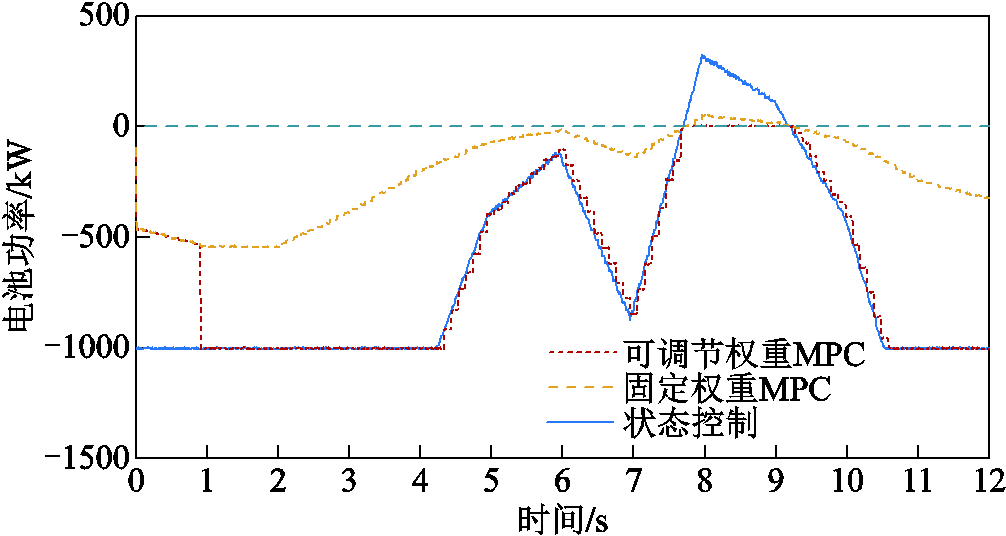
图18 储氢量处于极端值时电池功率对比结果
Fig.18 Comparison of battery power with extreme hydrogen storage

图19 储氢量处于极端值时燃料电池功率对比结果
Fig.19 Comparison of fuel cell power with extreme hydrogen storage
由图17~图19可知,0~1 s可调节权重与固定权重曲线相同,1 s后由于储氢罐中SOH含量进入缓冲区间,可调节权重MPC将电池满发,剩余则由电解槽消纳,因此在1~7.7 s可调节权重MPC与状态控制基本相同,7.7~9.2 s由于系统存在缺额功率,可调节权重MPC此时则启动燃料电池使得储氢罐荷氢水平进入安全区间。
储氢量处于极端值时不同控制下SOH对比如图20所示。由图20可知,0~1 s内,SOH在三种不同控制方式作用下的变化近似相同,1 s后在固定权重MPC方式中得到快速上升,由此可以看出在该种情景下固定权重方式更容易发生电解槽的停机,此时状态控制和可调节权重MPC要优于固定权重MPC。7.7 s后在可调节权重MPC中由于燃料电池的放电作用使得储氢罐含量下降,若实际中放电时长更长,则可以发现可调节权重MPC相较于状态控制安全性明显增强。
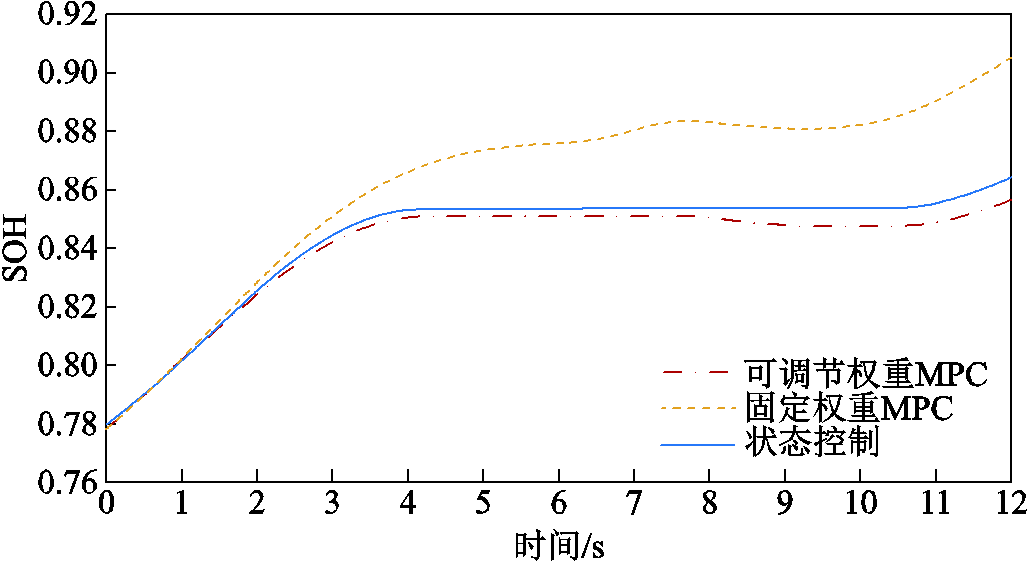
图20 储氢量处于极端值时SOH对比结果
Fig.20 Comparison of SOH with extreme hydrogen storage
不同控制下SOC对比如图21所示。由图21可知,0~1 s内,SOC上升速度在两种MPC方式中相同,1 s后可调节权重MPC和状态控制SOC快速上升,电池得到充分利用,此时两种方式要优于固定权重MPC方式。
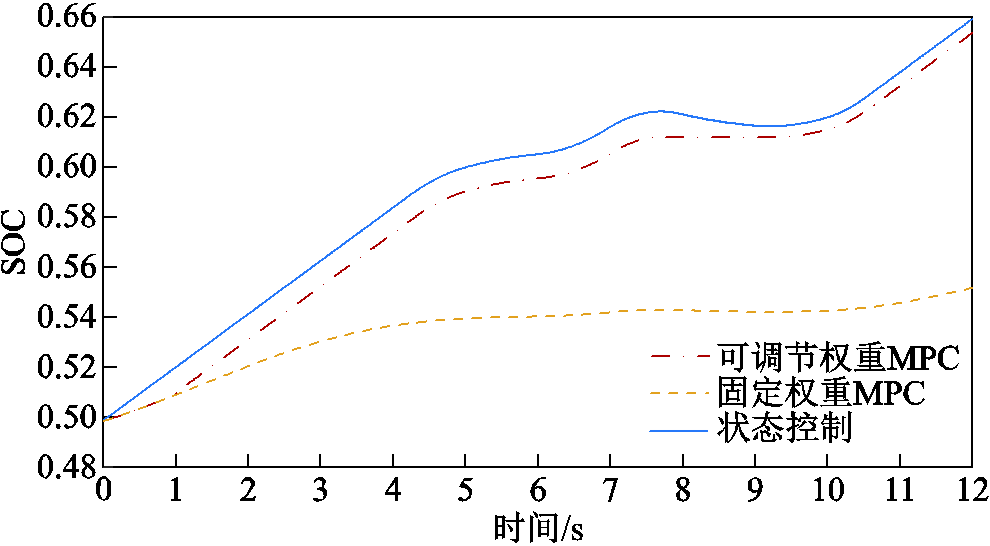
图21 储氢量处于极端值时SOC对比结果
Fig.21 Comparison of SOC with extreme hydrogen storage
本文选取电池处于深度充放电区域的时长和电解槽启停次数作为评价三种控制效果优劣的标准,在相同时间内电池处于深度充放电区域时间越短、电解槽启停次数越少,控制策略越有优势,三种控制策略的评价指标对比见表3。
表3 控制策略评价指标
Tab.3 Control strategy evaluation index
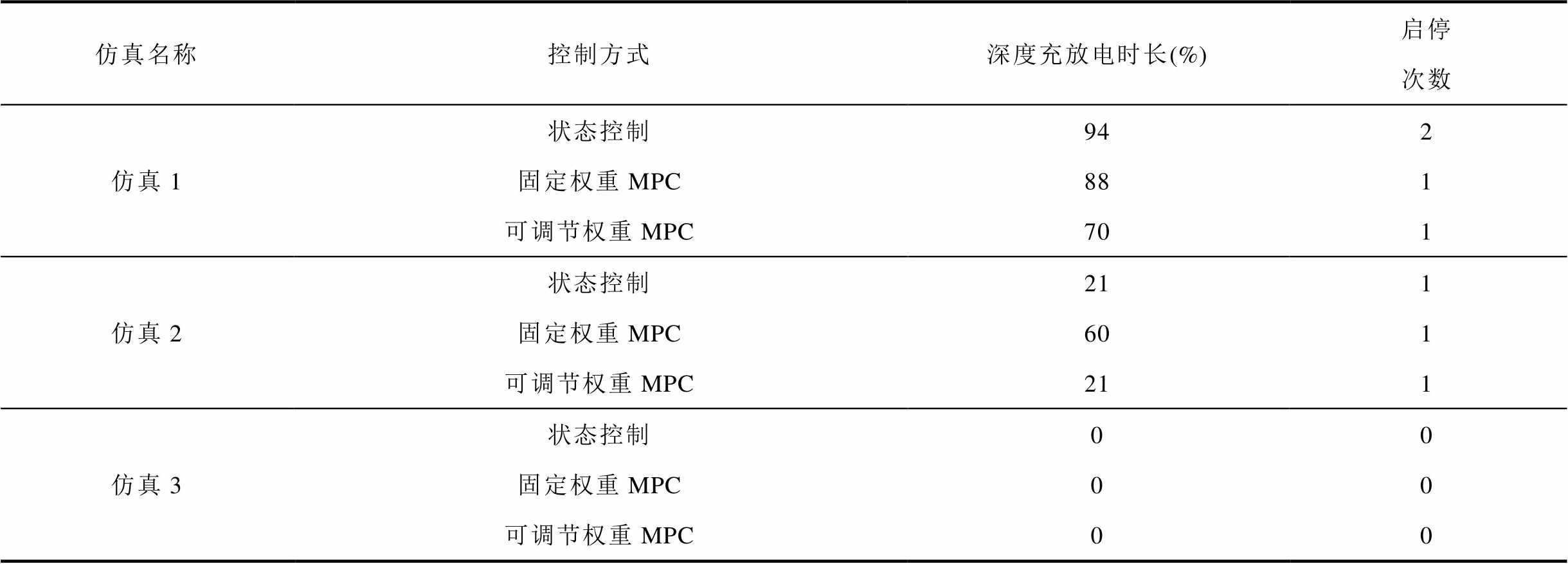
仿真名称控制方式深度充放电时长(%)启停次数 仿真1状态控制942 固定权重MPC881 可调节权重MPC701 仿真2状态控制211 固定权重MPC601 可调节权重MPC211 仿真3状态控制00 固定权重MPC00 可调节权重MPC00
当电池SOC处于低水平时,在可调节权重因子的MPC中,将会优先给电池进行充电,使电池SOC能够快速回到正常范围,防止电池长期处于深度放电区域;状态控制和固定权重MPC虽然能够使电池SOC和储氢罐SOH维持在最大上下限区间,但是会存在某种储能装置被充分利用,另一种储能装置却没有达到理想工作情况的现象,因此电池更容易发生过充或过放现象,储氢水平到达警戒范围次数增多且两者回归正常水平的时间更慢。状态控制和固定权重MPC在上限或下限的边界时会引发电解槽或燃料电池的频繁动作,而可调节权重因子的MPC在达到安全限值时能够及时切换储能工作模式,提高了设备的可靠性。
本文构建了风-光-储-氢耦合系统结构,建立了耦合系统的状态空间,基于s-函数自定义了MPC控制器,针对系统的9种不同运行模式,提出了契合的功率在线调控方法,通过仿真分析得到结论如下:
1)基于MPC的在线功率调控方法,实现了耦合系统的电-氢储能在线定量比例调节。
2)基于自定义s-函数开发了参数自适应的MPC在线控制器,且完成了系统的闭环仿真验证,为风-光-储-氢等多输入多输出系统提供了Simulink环境下灵活、开放在线MPC优化控制模块。
3)将三种不同控制策略进行对比,相比于采用状态控制、固定权重因子的MPC,本文根据不同工况对MPC权重因子进行改变,提高了电-氢储能参与度的灵活性和系统运行可靠性。
附 录
1. 系统仿真参数设置
附表1 系统控制器参数
App.Tab.1 Controller parameters of the system

参数数值 电池充电比例积分时间常数kp6, ki60.4, 0.000 7 电池放电比例积分时间常数kp5, ki50.2, 0.01 电解槽比例积分时间常数kp10, ki100.08, 0.01 燃料电池比例积分时间常数kp9, ki91, 0.005 风电比例积分时间常数kp1, kp2, ki1, ki2风电模块增益常数k1, k2电网比例积分常数kp3, kp4, ki3, ki4电网模块增益常数k3, k4500, 200, 1, 1 25 000, 3 000 500, 50, 0, 70 1 500, 1 500
附表2 系统参数
App.Tab.2 Parameters of the system

设备参数数值 电池电池容量Qn/(A·h)10 荷电状态范围下限SOCmin(%)0 荷电状态范围上限SOCmax(%)100 电池安全区间下限SOC_op1(%)10 电池安全区间上限SOC_op2(%)90 电池放电功率上限Pbat_dismax/MW1 电池放电功率下限Pbat_dismin/MW0 电池充电功率上限Pbat_chmax/MW1 电池充电功率下限Pbat_chmin/MW0 电池电压Ubat/kV0.5 电解槽法拉第常数F/(C/mol)96 845 自由能变ΔG/(kJ/mol)237 每次反应电子转移数z2 电解液欧姆电阻参数r1/(Ω·m2)7.33×10-5 电解液欧姆电阻参数r2/(Ω·m2)-1.11×10-7 电极过电压系数s1/V0.159 电极过电压系数s2/(V/K)1.38×10-3 电极过电压系数s3/(V/K2)-1.61×10-5 电极过电压系数t1/(m2/A)1.6×10-2 电极过电压系数t2/(m2·K/A)-1.302 电极过电压系数t3/(m2·K2/A)4.21×102 电解槽串联个数Nel400 电解模块面积Acell/m20.18 电解槽功率下限Pelmin/MW0 电解槽功率上限Pelmax/MW5 电解槽电压Uel/kV0.5
(续)

设备参数数值 燃料电池燃料电池功率下限Pfcmin/MW0 燃料电池功率上限Pfcmax/MW2 燃料电池电压Ufc/kV0.5 燃料串联个数Nfc450
(续)

设备参数数值 储氢罐荷氢状态下限SOHmin(%)0 荷氢状态上限SOHmax(%)100 储氢罐安全区间下限SOH_op1(%)20 储氢罐安全区间上限SOH_op2(%)80
2. 状态控制策略图
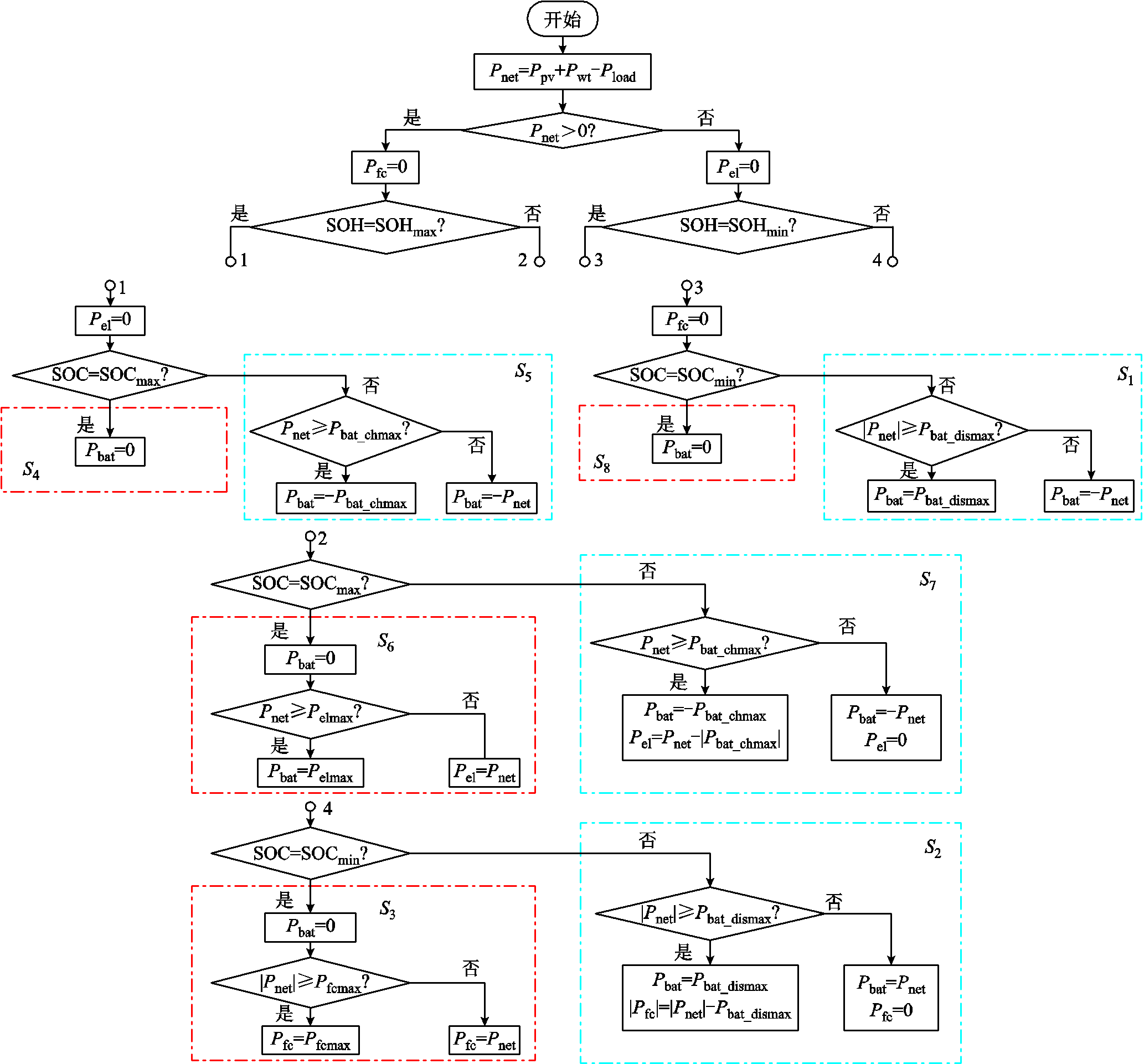
附图1 状态控制策略框图
App.Fig.1 State control strategy block diagram
参考文献
[1] 黄雨涵, 丁涛, 李雨婷, 等. 碳中和背景下能源低碳化技术综述及对新型电力系统发展的启示[J]. 中国电机工程学报, 2021, 41(增刊1): 28-51. Huang Yuhan, Ding Tao, Li Yuting, et al. Decarbonization technologies and inspirations for the development of novel power systems in the context of carbon neutrality[J]. Proceedings of the CSEE, 2021, 41(S1): 28-51.
[2] 张智刚, 康重庆. 碳中和目标下构建新型电力系统的挑战与展望[J]. 中国电机工程学报, 2022, 42(8): 2806-2819. Zhang Zhigang, Kang Chongqing. Challenges and prospects for constructing the new-type power system towards a carbon neutrality future[J]. Proceedings of the CSEE, 2022, 42(8): 2806-2819.
[3] 潘光胜, 顾钟凡, 罗恩博, 等. 新型电力系统背景下的电制氢技术分析与展望[J]. 电力系统自动化, 2023, 47(10): 1-13. Pan Guangsheng, Gu Zhongfan, Luo Enbo, et al. Analysis and prospect of electrolytic hydrogen technology under background of new power systems[J]. Automation of Electric Power Systems, 2023, 47(10): 1-13.
[4] 李建林, 李雅欣, 刘海涛, 等. 计及储能电站安全性的功率分配策略研究[J]. 电工技术学报, 2022, 37(23): 5976-5986.Li Jianlin, Li Yaxin, Liu Haitao, et al. Research on power distribution strategy considering the safety of energy storage power station[J]. Transactions of China Electrotechnical Society, 2022, 37(23): 5976-5986.
[5] 杨炜晨, 苗世洪, 刘志伟, 等. 面向分布式电源功率波动平抑的变频空调集群多时间尺度模型预测控制策略[J]. 电工技术学报, 2022, 37(19): 4848-4861.Yang Weichen, Miao Shihong, Liu Zhiwei, et al. Multi-time-scale model predictive control of inverter air conditioner cluster for distributed power fluctuation stabilization[J]. Transactions of China Electrotechnical Society, 2022, 37(19): 4848-4861.
[6] 袁铁江, 孙传帅, 谭捷, 等. 考虑氢负荷的新型电力系统电源规划[J]. 中国电机工程学报, 2022, 42(17): 6316-6326. Yuan Tiejiang, Sun Chuanshuai, Tan Jie, et al. Generation planning of new power system considering hydrogen load[J]. Proceedings of the CSEE, 2022, 42(17): 6316-6326.
[7] 郭立东, 雷鸣宇, 杨子龙, 等. 光储微网系统多目标协调控制策略[J]. 电工技术学报, 2021, 36(19): 4121-4131. Guo Lidong, Lei Mingyu, Yang Zilong, et al. Multi-objective coordinated control strategy for photovoltaic and energy-storage microgrid system[J]. Transactions of China Electrotechnical Society, 2021, 36(19): 4121-4131.
[8] 肖朝霞, 贾双, 朱建国, 等. 风光储微电网并网联络线功率控制策略[J]. 电工技术学报, 2017, 32(15): 169-179. Xiao Zhaoxia, Jia Shuang, Zhu Jianguo, et al. Tie-line power flow control strategy for a grid-connected microgrid containing wind, photovoltaic and battery[J]. Transactions of China Electrotechnical Society, 2017, 32(15): 169-179.
[9] 周强, 汪宁渤, 何世恩, 等. 高弃风弃光背景下中国新能源发展总结及前景探究[J]. 电力系统保护与控制, 2017, 45(10): 146-154. Zhou Qiang, Wang Ningbo, He Shien, et al. Summary and prospect of China’s new energy development under the background of high abandoned new energy power[J]. Power System Protection and Control, 2017, 45(10): 146-154.
[10] 李奇, 赵淑丹, 蒲雨辰, 等. 考虑电氢耦合的混合储能微电网容量配置优化[J]. 电工技术学报, 2021, 36(3): 486-495. Li Qi, Zhao Shudan, Pu Yuchen, et al. Capacity optimization of hybrid energy storage microgrid considering electricity-hydrogen coupling[J]. Transactions of China Electrotechnical Society, 2021, 36(3): 486-495.
[11] 郭小强, 魏玉鹏, 万燕鸣, 等. 新能源制氢电力电子变换器综述[J]. 电力系统自动化, 2021, 45(20): 185-199. Guo Xiaoqiang, Wei Yupeng, Wan Yanming, et al. Review on power electronic converters for producing hydrogen from renewable energy sources[J]. Automation of Electric Power Systems, 2021, 45(20): 185-199.
[12] 李争, 张蕊, 孙鹤旭, 等. 可再生能源多能互补制-储-运氢关键技术综述[J]. 电工技术学报, 2021, 36(3): 446-462. Li Zheng, Zhang Rui, Sun Hexu, et al. Review on key technologies of hydrogen generation, storage and transportation based on multi-energy complementary renewable energy[J]. Transactions of China Electrotechnical Society, 2021, 36(3): 446-462.
[13] 杨文强, 邢小文, 覃姝仪, 等. 大规模风/光互补制储氢系统协调控制策略研究[J]. 电力电子技术, 2020, 54(12): 24-27, 55. Yang Wenqiang, Xing Xiaowen, Qin Shuyi, et al. Study of coordination control strategy of large-scale wind/PV hybrid hydrogen energy system[J]. Power Electronics, 2020, 54(12): 24-27, 55.
[14] García P, García C A, Fernández L M, et al. ANFIS-based control of a grid-connected hybrid system integrating renewable energies, hydrogen and batteries[J]. IEEE Transactions on Industrial Informatics, 2014, 10(2): 1107-1117.
[15] Ghosh S, Barman J C, Batarseh I. Model predictive control of multi-input solar-wind hybrid system in DC community with battery back-up[C]//2021 IEEE 12th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Chicago, IL, USA, 2021: 1-8.
[16] Trifkovic M, Sheikhzadeh M, Nigim K, et al. Modeling and control of a renewable hybrid energy system with hydrogen storage[J]. IEEE Transactions on Control Systems Technology, 2014, 22(1): 169-179.
[17] Sevilla F R S, Park C, Knazkins V, et al. Model predictive control of energy systems with hybrid storage[C]//2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 2016: 1-5.
[18] Aguilera Gonzalez A, Bottarini M, Vechiu I, et al. Model predictive control for the energy management of a hybrid PV/battery/fuel cell power plant[C]//2019 International Conference on Smart Energy Systems and Technologies (SEST), Porto, Portugal, 2019: 1-6.
[19] Valverde L, Bordons C, Rosa F. Integration of fuel cell technologies in renewable-energy-based microgrids optimizing operational costs and durability[J]. IEEE Transactions on Industrial Electronics, 2016, 63(1): 167-177.
[20] 蔡国伟, 陈冲, 孔令国, 等. 风电/制氢/燃料电池/超级电容器混合系统控制策略[J]. 电工技术学报, 2017, 32(17): 84-94. Cai Guowei, Chen Chong, Kong Lingguo, et al. Control of hybrid system of wind/hydrogen/fuel cell/supercapacitor[J]. Transactions of China Electrotechnical Society, 2017, 32(17): 84-94.
[21] 孔令国, 蔡国伟, 李龙飞, 等. 风光氢综合能源系统在线能量调控策略与实验平台搭建[J]. 电工技术学报, 2018, 33(14): 3371-3384. Kong Lingguo, Cai Guowei, Li Longfei, et al. Online energy control strategy and experimental platform of integrated energy system of wind, photovoltaic and hydrogen[J]. Transactions of China Electrotechnical Society, 2018, 33(14): 3371-3384.
[22] 邓浩, 陈洁, 焦东东, 等. 风氢耦合并网系统能量管理控制策略[J]. 高电压技术, 2020, 46(1): 99-106. Deng Hao, Chen Jie, Jiao Dongdong, et al. Control strategy for energy management of hybrid grid-connected system of wind and hydrogen[J]. High Voltage Engineering, 2020, 46(1): 99-106.
[23] 孔令国, 于家敏, 蔡国伟, 等. 基于模型预测控制的离网电氢耦合系统功率调控[J]. 中国电机工程学报, 2021, 41(9): 3139-3149. Kong Lingguo, Yu Jiamin, Cai Guowei, et al. Power regulation of off-grid electro-hydrogen coupled system based on model predictive control[J]. Proceedings of the CSEE, 2021, 41(9): 3139-3149.
[24] 陈虹. 模型预测控制[M]. 北京: 科学出版社, 2013.
Abstract With the proposal of carbon peaking and carbon neutrality, the development of renewable energy has become a top priority in the construction of a new green power system. The development and utilization of wind-photovoltaic-storage-hydrogen coupling system will become one of the best options to make full use of solar energy resources. Due to the intermittency and uncertainty of wind power generation, coupled with the randomness of load, the importance of source-storage-load research in dynamic power balance is gradually manifested. In addition, the working state of each unit in the coupling system is not the same, so enhancing the safety of the hydrogen storage system and the reliability of the electric storage system is an urgent problem to be solved in the wind-photovoltaic-storage-hydrogen coupling system. In this paper, an online power regulation method of wind-photovoltaic-storage-hydrogen coupling system based on weight regulation model predictive control is proposed to optimize and match storage-hydrogen power and wind- photovoltaic power in real time, aiming at the wind wave fluctuation and the dynamic response characteristics of hydrogen storage.
Firstly, the topological structure of the wind-photovoltaic-storage-hydrogen coupling energy system was constructed in Matlab/Simulink, and the state-space model of the coupling system was established. The power balance of the coupling system was taken as the goal, and hydrogen production power, fuel cell power and battery power were taken as the control variables. According to the characteristics of hydrogen energy storage and battery energy storage and the objective function of each constraint condition, it is transformed into the quadratic programming problem for solving. In the MPC controller, the weight factors are adjusted according to the state information of the energy storage system, and the parameter adaptive of the controller is realized. Finally, the closed-loop simulation of the power control layer and the energy management layer is completed, and the three different control methods are compared and analyzed.
The results show that: (1) the online power control method based on MPC can realize the online quantitative proportional regulation of the electric-hydrogen energy storage in the coupled system. (2) Based on the custom s-function, the MPC online controller with self-adaptive parameters is developed, and the closed-loop simulation verification of the system is completed, which provides a flexible and open online MPC optimization control module under Simulink environment for multi-input and multi-output systems such as wind-photovoltaic-storage-hydrogen. (3) By comparing three different control strategies, the simulation shows that although state control and fixed weight MPC control can maintain SOC and SOH in the maximum upper and lower limits, some energy storage device will be fully utilized while another energy storage device does not reach the ideal working condition, so the battery is more likely to overcharge or overdischarge. Hydrogen storage levels reached the warning range more often and the time for both to return to normal level was slower. Compared with MPC control which adopts state control and fixed weight factor, this paper changes MPC weight factor according to different working conditions. In the MPC control with adjustable weight, the battery is in the deep charge and discharge area for a shorter time, and the number of start-stop of electrolytic cell is less, thus increasing the flexibility of electric-hydrogen energy storage participation and system operation reliability.
keywords:Wind-photovoltaic-storage-hydrogen coupling system, weight adjustment, model predictive control, power regulation, closed-loop simulation
DOI: 10.19595/j.cnki.1000-6753.tces.230227
中图分类号:TM73
国家重点研发计划(2018YFB1503100)和国家自然科学基金(51907021)资助项目。
收稿日期 2023-02-27
改稿日期 2023-04-04
孔令国 1984年生,男,博士,副教授,研究方向为可再生能源耦合氢能关键技术。E-mail:klgwin@neepu.edu.cn(通信作者)
王嘉祺 1997年生,女,硕士研究生,研究方向为可再生能源耦合氢能控制技术。E-mail:2835595815@qq.com
(编辑 李冰)