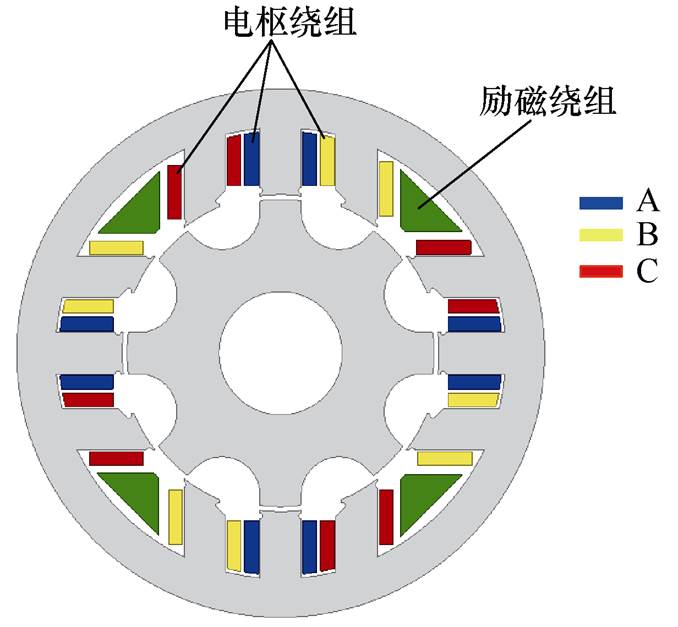
图1 三相12/8极DSEM结构示意图
Fig.1 Structure of three-phase 12/8-pole DSEM
摘要 电励磁双凸极电机的非正弦反电动势特性会导致相电流存在较大的2次和4次谐波,从而降低电机的转矩输出能力。同时,电励磁双凸极电机的电流谐波频率较高,导致传统准比例谐振控制器经过双线性变换后会存在较大的谐振频率偏差,使得电流谐波抑制效果有限。针对此问题,该文首先推导了具有零谐振频率偏差的离散变换表达式,并对表达式进行简化处理,提出了一种基于改进型准比例谐振控制的电励磁双凸极电机电流谐波抑制方法。此外,结合电机的反电动势特性,分析了相电流谐波的产生原因,推导了考虑电流谐波和反电动势谐波的电励磁双凸极电机转矩模型,分析了相电流谐波对电机平均转矩的影响。最后,仿真和实验结果表明,所提方法可以有效地补偿谐振频率偏差,抑制电励磁双凸极电机的相电流谐波,提升电机的转矩输出能力。
关键词:电流谐波 电励磁双凸极电机 准比例谐振控制 谐振频率偏差 转矩输出能力
电励磁双凸极电机(Doubly Salient Electro- magnetic Machine, DSEM)作为一种变磁阻电机,在开关磁阻电机的基础上,保留了开关磁阻电机定转子双边凸极的结构,并且在定子上引入了额外的励磁绕组[1]。因此,DSEM具有结构简单可靠、制造成本低和磁场易于调节等优点,适用于宽转速范围的电机驱动系统[2-3]。然而,现有的DSEM电动控制方法无法充分发挥其转矩输出能力,导致其平均输出转矩较低。
近年来,关于DSEM的研究主要从本体设计和电机控制两个方面出发,提升DSEM的转矩输出能力[4-6]。文献[4]通过引入额外的角度控制参数,提出了三相六状态控制策略和三相九状态控制策略,有效地补偿了DSEM的换相转矩损失,提升了转矩输出能力。文献[5]提出了一种不对称电流控制策略,充分利用了磁阻转矩,有效地提升了DSEM的平均转矩。文献[6]提出了一种基于角度自适应优化的同步换相控制方法。该方法引入角度闭环,使得相电流过零点与定转子对齐位置同步,通过控制相电流矢量的运动轨迹,实现对三相电流换相过程的控制,提升了DSEM的转矩输出能力。
DSEM传统的电动控制方法大多是基于理想电感特性的方波电流控制策略。由于母线电压的限制以及电感和反电动势(back-Electromotive Force, back-EMF)的存在,三相电流换相速率有限,导致了电流换相区间存在较大的转矩损失,降低了DSEM的转矩输出能力。文献[7]对比分析了DSEM在方波和正弦波电流控制下的损耗和转矩特性。研究结果表明,相对于传统方波电流控制,DSEM在正弦波电流控制下具有更低的损耗和更高的转矩输出能力。此外,正弦波电流控制可以有效地避免方波控制中换相转矩脉动大和角度控制参数难以选取的问题[8]。然而,DSEM的定转子结构和绕组排布方式导致其反电动势谐波含量大,从而导致传统正弦波控制方法下三相电流存在较大的谐波分量。不受控的相电流谐波会降低DSEM的电流控制性能,影响电机的转矩输出能力和振动噪声[9-10]。
目前,常见的电机电流谐波抑制方法分为两方面:一方面是通过对电机本体结构进行优化,如采用转子斜极的结构,削弱电机磁场谐波含量[11];另一方面是通过电机控制策略实现电流谐波的抑制,如多旋转PI控制[12-13]、重复控制[14]和准比例谐振(Proportional Resonant, PR)控制[15-16]等。其中,多旋转PI控制是通过对不同次的电流谐波进行不同的旋转变换,将其分别转换为不同旋转坐标系下的直流量,再分别采用PI调节器将电流谐波控制为零。多旋转PI控制对各次电流谐波都需要进行坐标变换和PI计算,因此其参数整定复杂,计算量大。重复控制可以用来抑制给定频率整数倍的谐波分量,但其参数整定复杂,所需存储空间大。准PR控制可以实现对谐振频率处的交流信号具有较高的增益,对交流信号的无静差跟踪。相对于多旋转PI控制和重复控制,准PR控制具有良好的电流谐波抑制效果,并且所需计算时间少[17-18]。
准PR控制器应用于实际电机系统时,需要进行离散化处理。双线性变换法可以克服多值映射关系,消除频率混叠,并且具有简单易用的优点,成为了最常用的离散化方法[19]。然而,准PR控制器经过传统双线性变换进行离散化处理后,其谐振频率会产生较大的偏移,从而降低了电流谐波抑制效果[20-21]。文献[22]推导了准PR控制的谐振频率误差表达式,并基于计算出的误差值进行谐振频率误差的补偿,降低电机的电流谐波。文献[23]采用基于脉冲响应不变法的离散化方法对准PR控制器进行离散化处理,消除谐振频率偏差,从而实现永磁电机电流谐波的抑制。文献[24]采用由双旋转积分器构成的双PR控制器,避免了谐振控制器离散化导致的零极点偏移。文献[25]提出将鲁棒内模控制器与分数阶矢量谐振控制器结合,有效地提升了电流谐波抑制效果与参数鲁棒性。文献[26]通过在谐振控制器的路径中引入滤波器,从而消除谐振控制器在闭环系统中产生的极点。
由于12/8极DSEM的定转子结构及绕组排布方式,其反电动势含有较大的2次和4次谐波,从而导致DSEM的三相电流存在较大的2次和4次谐波。当采用准PR控制器抑制DSEM的电流谐波时,DSEM较高的电流谐波频率将带来较大的谐振频率偏差,从而影响电流谐波抑制效果。因此,本文推导了具有零谐振频率偏差的离散变换表达式,并对该表达式进行简化处理,提出了一种基于改进型准PR控制的DSEM电流谐波抑制方法。此外,本文推导了考虑电流谐波和反电动势谐波的DSEM转矩模型,而后结合DSEM的反电动势特性,分析了DSEM电流谐波的产生原因。结合转矩模型,本文分析了相电流谐波对DSEM平均输出转矩的影响。最后,仿真和实验结果表明,本文所提出的改进型准PR控制能够有效地补偿谐振频率偏差,抑制DSEM的相电流谐波,提升转矩输出能力。
图1为三相12/8极DSEM的结构示意图。由图1可知,DSEM的转子上没有绕组和永磁体,定子采用平行极结构,定子槽内嵌有三相电枢绕组和集中式的励磁绕组。
图1 三相12/8极DSEM结构示意图
Fig.1 Structure of three-phase 12/8-pole DSEM
图2所示为DSEM的空载反电动势特性及其频谱分析结果。由图2a可知,DSEM的反电动势波形是介于方波和正弦波之间的准方波。由图2a可知,DSEM的反电动势含有基波、2次和4次谐波分量,其中,反电动势基波幅值占据较大的比重。因此,DSEM在正弦波电流驱动下同样可以获取较大的输出转矩。文献[7]指出,相较于方波电流驱动,DSEM在正弦波电流驱动下具有更低的铁损和铜损。
DSEM的定转子结构和绕组排布方式导致其反电动势含有较大的谐波分量。因此,当DSEM采用传统的正弦波电流控制方法时,相电流会存在较大的2次和4次谐波分量。不受控的相电流谐波会影响DSEM的电流控制性能和转矩输出能力。本节将重点分析DSEM相电流谐波的产生原因,并推导DSEM考虑相电流和反电动势谐波的转矩模型,便于后文分析相电流谐波对转矩输出的影响。
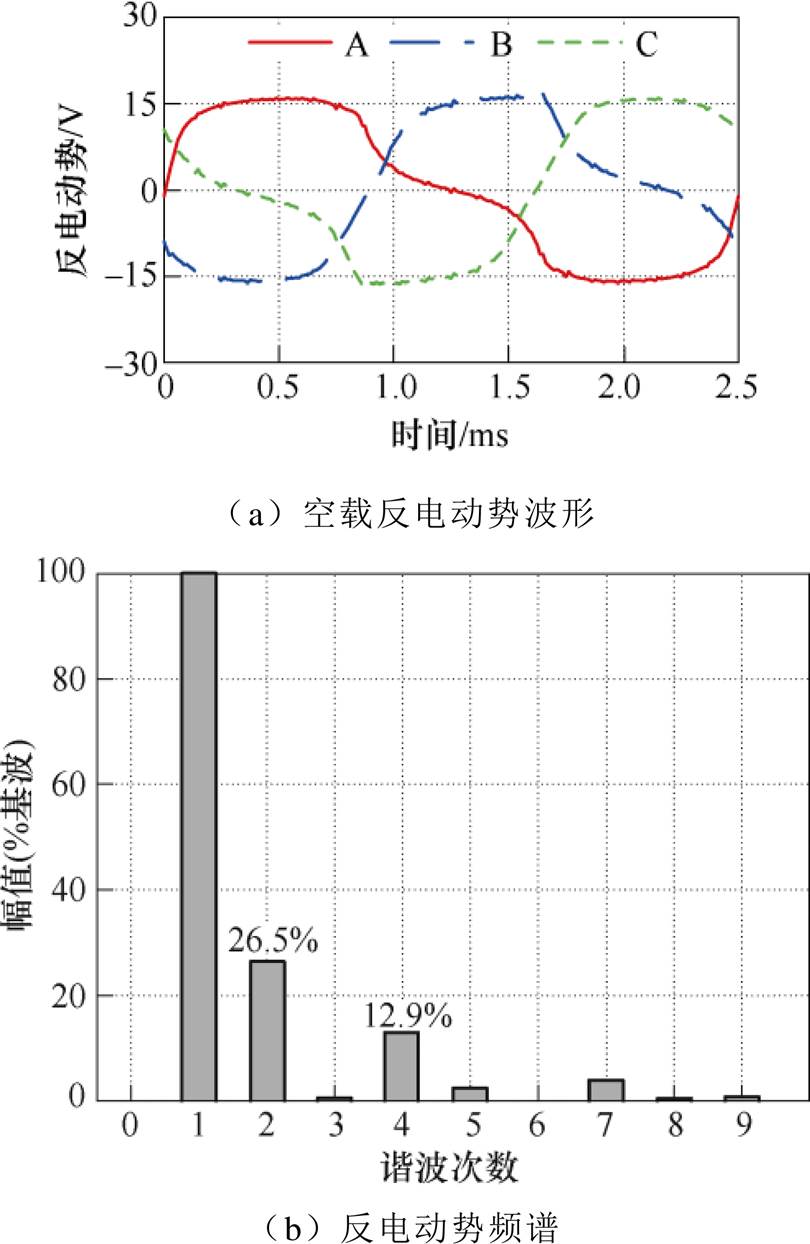
图2 DSEM空载反电动势及其频谱
Fig.2 No-load back-EMF and its spectrum of DSEM
当采用DSEM的传统正弦波电流控制时,三相电流会存在较大的2次和4次谐波,即d轴和q轴电流会存在较大的3次谐波。电流谐波产生的原因主要分为两个方面:一方面,如图2所示,DSEM的电机结构使得其反电动势波形含有较大的2次和4次谐波分量。根据电压平衡式,三相电流会存在2次和4次谐波分量。相电流2次和4次谐波分量经坐标变换转化为旋转坐标系下的3次谐波分量;另一方面,DSEM的正弦波电流控制通常采用PI调节器作为d轴和q轴的电流调节器。d轴电流给定值 和q轴电流给定值
和q轴电流给定值 通常为直流量,而由于反电动势含有较大的2次和4次谐波分量,d轴电流id和q轴电流iq的反馈值包含3次谐波分量,从而导致d轴和q轴的电流误差值含有3次谐波。如图3所示的是比例系数Kp=1.5、积分系数Ki=500时PI调节器的伯德图。由图3可知,PI调节器对直流量和低频信号的增益较大,而对d轴和q轴的3次电流谐波误差所在频率处增益较低,难以将3次谐波误差反映至PI调节器输出的d轴电压ud和q轴电压uq,从而导致d轴和q轴电流存在3次谐波,即三相电流存在2次和4次电流谐波分量。
通常为直流量,而由于反电动势含有较大的2次和4次谐波分量,d轴电流id和q轴电流iq的反馈值包含3次谐波分量,从而导致d轴和q轴的电流误差值含有3次谐波。如图3所示的是比例系数Kp=1.5、积分系数Ki=500时PI调节器的伯德图。由图3可知,PI调节器对直流量和低频信号的增益较大,而对d轴和q轴的3次电流谐波误差所在频率处增益较低,难以将3次谐波误差反映至PI调节器输出的d轴电压ud和q轴电压uq,从而导致d轴和q轴电流存在3次谐波,即三相电流存在2次和4次电流谐波分量。
为了后文分析电流谐波对DSEM转矩的影响,需要推导考虑电流谐波的DSEM转矩表达式。DSEM单相转矩可以表示为

图3 PI调节器的伯德图(Kp=1.5, Ki=500)
Fig.3 Bode diagram of the PI regulator
 (1)
(1)
式中,ep为单相反电动势;ip为单相电流;w 为机械角速度。为了分析谐波的影响,分别对反电动势和电流进行Fourier变换,表示为谐波形式,有
 (2)
(2)
 (3)
(3)
式中,n和m分别为反电动势与电流的谐波次数;an和bm分别为反电动势与电流谐波的相位;E0和I0分别为反电动势与相电流的直流分量;En和Im分别为反电动势与电流谐波的幅值。忽略相电流和反电动势的直流分量,将式(2)和式(3)分别代入式(1)得
 (4)
(4)
 (5)
(5)
式中,Tpdc为单相平均转矩;Tpac为转矩脉动分量。由式(5)可知,DSEM的平均转矩主要由相同次数的反电动势谐波和电流谐波作用产生。忽略DSEM三相不对称的影响,DSEM总平均转矩的表达式为
 (7)
(7)
由式(7)可知,DSEM的平均转矩受到反电动势谐波幅值和电流的谐波幅值以及反电动势谐波和电流谐波之间相位差的影响。因此,三相电流中的不受控的2次和4次谐波分量会影响DSEM的平均输出转矩。相电流谐波对DSEM平均转矩的影响将在4.3节结合仿真结果进行定量的分析。
传统PI调节器对相电流谐波的增益较低,难以有效地抑制相电流谐波。不可控的相电流谐波会影响DSEM的平均输出转矩。因此,本文在原有的PI调节器基础上,引入准PR控制器,提升对电流谐波所在频率处的增益,从而抑制电流谐波。
本文所采用的准PR控制器的传递函数为
 (8)
(8)
式中,Kr为谐振系数;wo为谐振角频率;wc为谐振带宽频率。
图4所示为不同谐振带宽频率下准PR控制器的伯德图。由图4可知,谐振带宽频率wc不会影响谐振频率处的增益,谐振带宽频率wc越大,准PR控制器具有高增益的频率范围越大,但过大的谐振带宽频率wc会引入噪声,降低系统稳定性。另一方面,谐振带宽频率wc不能过小,这是因为电机实际运行时,转速的波动会导致电流谐波频率存在波动,致使电流谐波频率处于高增益频率范围外,从而影响电流谐波的抑制效果。对于本文的DSEM驱动系统,电机额定条件下的转速波动约为±7.5 r/min,d轴和q轴的3次电流谐波频率波动为±3 Hz。为了保证电流谐波频率处于准PR控制的高增益频率范围内,本文的谐振带宽频率wc取2p rad/s。
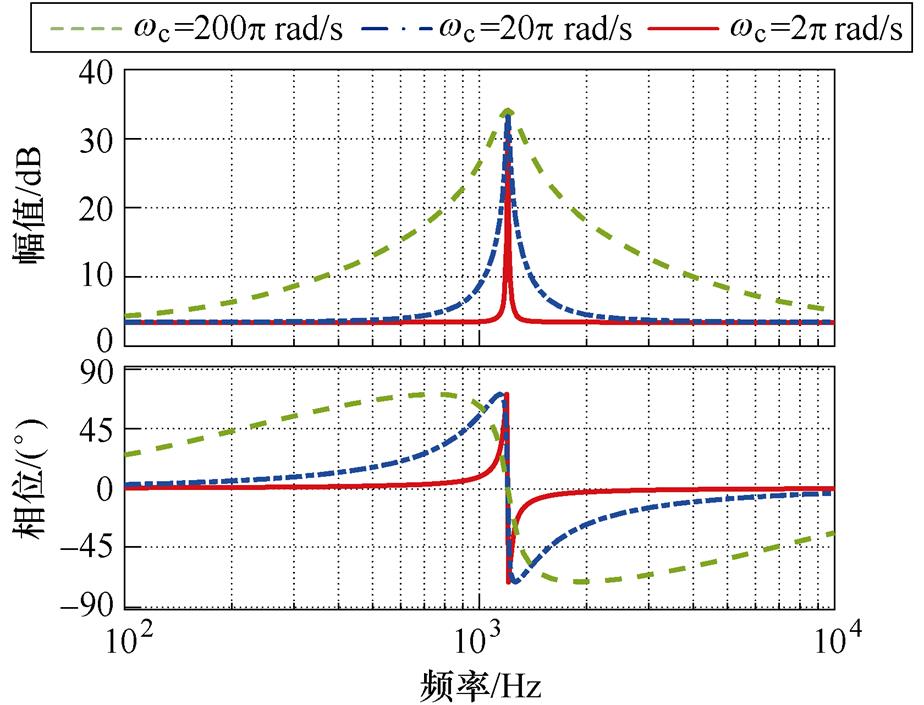
图4 不同谐振带宽频率下准PR控制器的伯德图
Fig.4 Bode diagram of the quasi-PR controller under different resonance bandwidth
谐振系数Kr主要影响准PR控制器在谐振频率处的增益大小。图5所示为不同谐振系数下准PR控制器的伯德图。随着谐振系数的增大,准PR控制器在谐振频率处的增益越大,越有利于电流谐波的抑制,但是过大的谐振系数会导致准PR控制的输出出现振荡,从而影响系统的稳定性。本文的谐振系数取值为50。此外,谐振频率wo等于d轴和q轴电流3次谐波频率。
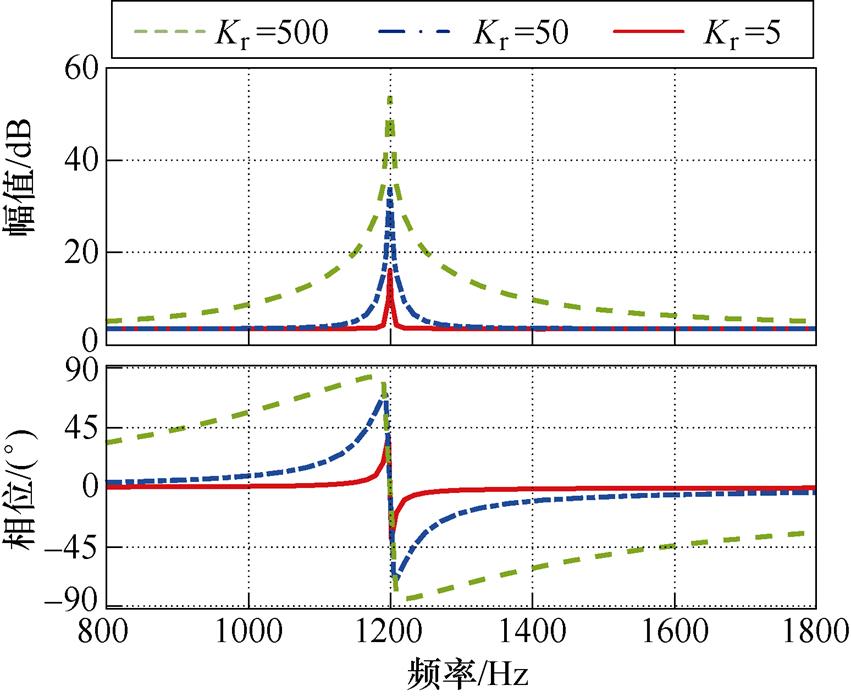
图5 不同谐振系数下准PR控制器的伯德图
Fig.5 Bode diagram of the quasi-PR controller under different resonance coefficient
准PR控制器在应用于实际电机驱动系统时,需要进行相应的离散化处理。双线性变换可以克服多值映射关系,消除频率混叠,并且具有简单易用的优点,成为最常用的离散化方法[19]。然而,由于DSEM的电流谐波频率较高,传统准PR控制器用于DSEM的电流谐波抑制时,其谐振频率将存在较大的偏差,并且该谐振频率偏差在谐振频率较高时会更加严重。双线性变换的公式为
 (9)
(9)
式中,Ts为采样时间。准PR控制器的谐振部分经过双线性变换的离散化结果为
 (10)
(10)
图6所示为谐振角频率wo=2 400p rad/s、采样频率fs=20 kHz时,离散化前后准PR控制器的谐振频率偏差。由图6可知,谐振频率为1 200 Hz时,离散化后准PR控制器的谐振频率偏移至1 186 Hz处,存在14 Hz的频率偏差。因此,经过双线性变换离散化,准PR控制器的谐振频率会存在较大的偏差,从而影响电流谐波的抑制效果。
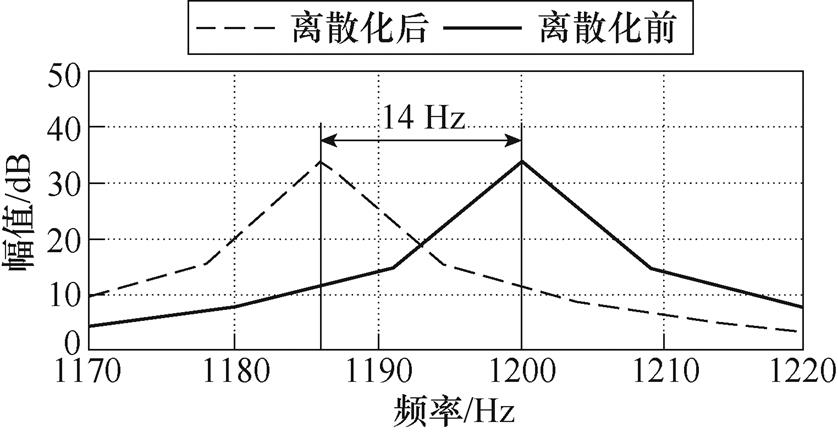
图6 离散化前后的谐振频率偏差(wo=2 400π rad/s, fs=20 kHz)
Fig.6 Resonance frequency deviation before and after bilinear transformation (wo=2 400π rad/s, fs=20 kHz)
由图6可知,采用传统双线性变换会导致准PR控制器的谐振频率偏差。因此,本文在传统双线性变换的基础上,提出一种改进的离散变换方法,其公式为
 (11)
(11)
式中,Kc为补偿系数。将式(11)代入式(8)可得
 (12)
(12)
计算式(12)中传递函数的极点,可以解得准PR控制器离散化后的实际谐振频率为
 (13)
(13)
令式(13)的实际谐振频率wreal等于谐振频率wo,可以解得
 (14)
(14)
采用式(14)中改进型的离散化方法可以消除谐振频率偏差。但式(14)中的正切函数在实际应用于数字处理器时,需要占用较大的计算资源,计算时间长,不利用参数的实时计算。因此,本文对式(14)的增益系数进行进一步优化,采用多项式替代式(14)的正切函数。
 (15)
(15)
图7所示为采用本文所提出的改进型离散化方法后准PR控制器的幅频响应。由图7可知,采用本文所提出的式(15)中离散化方法前后准PR控制器的谐振频率基本不变,谐振频率偏差得到了有效的补偿。
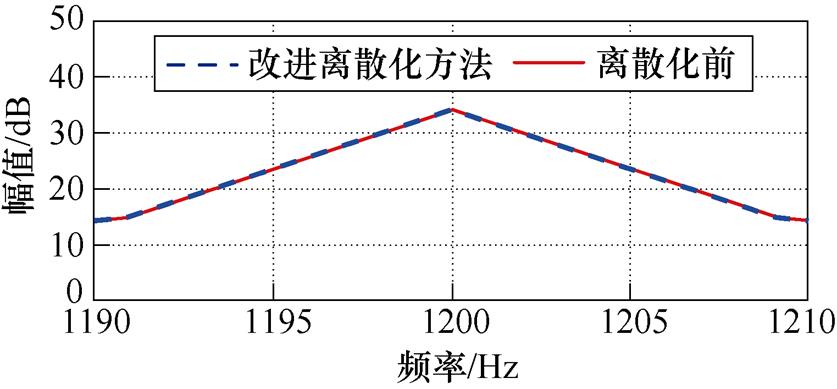
图7 频率补偿后准PR控制器的幅频响应
Fig.7 Amplitude-frequency response of quasi-PR controller after frequency compensation
图8所示为本文所提出的基于改进型离散化方法的准PR控制的DSEM电流谐波抑制方法控制框图。图中,n为转速,qr为转子位置角,S1~S6为三相逆变器的六路驱动信号,ia、ib和ic为三相电流,ia 和ib 分别为a 轴和b 轴电流,ua 和ub 分别为a 轴和b 轴电压。QPRzd和QPRzq为离散化后的准PR控制器,其与PI调节器并联共同构成电流调节器。PI控制器用于实现对直流量的无静差跟踪,准PR控制器用于实现对谐波分量的跟踪。离散参数计算模块根据式(12)、式(15)和电机反馈转速,实时计算离散准PR控制器的控制参数,从而消除谐振频率偏差,提升电流谐波抑制效果。
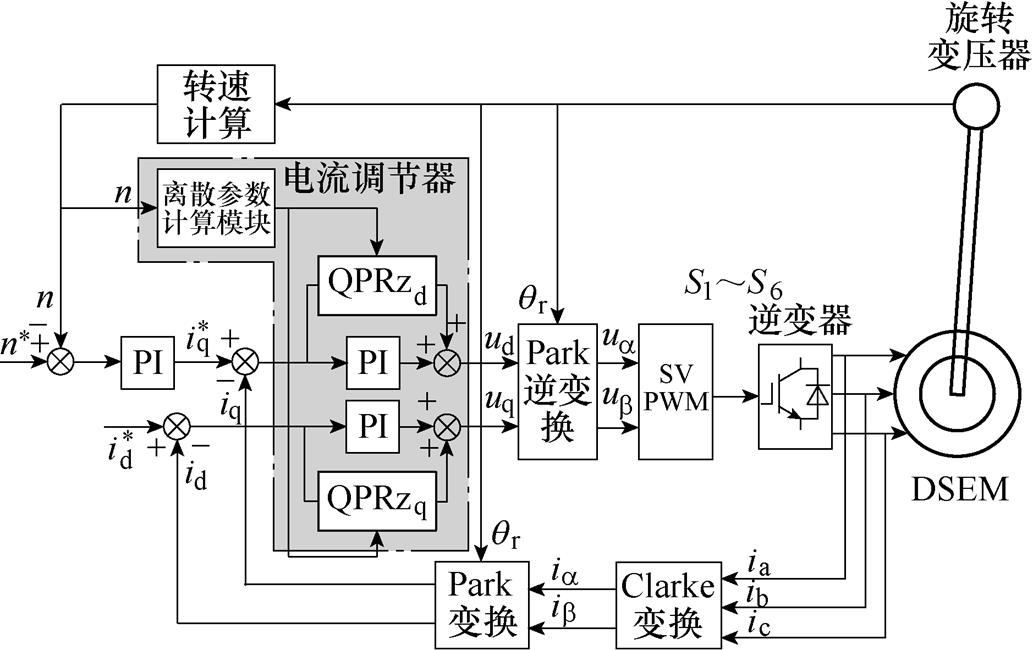
图8 基于改进型准PR控制的DSEM电流谐波抑制方法控制框图
Fig.8 Block diagram of the current harmonic suppression method of the DSEM based on improved quasi-PR control
为了验证本文所提出的基于改进型准PR控制的DSEM电流谐波抑制方法的有效性,在Matlab/ Simulink环境下,分别构建了基于PI控制、采用双线性变换的准PR控制和改进型准PR控制的DSEM正弦波电流控制系统仿真模型,相关仿真参数见 表1。PI调节器的比例系数Kp和积分系数Ki分别取1.5和500;准PR控制器的谐振系数Kr取50,谐振带宽频率wc取2π rad/s。以上PI控制器和准PR控制器的参数均为连续域参数,实际应用时需要根据式(12)和式(15)进行离散化处理。
表1 DSEM样机参数
Tab.1 Parameter of the studied DSEM

参 数数 值 额定转速/(r/min)3 000 额定转矩/(N·m)2 母线电压/V55 励磁电流/A20 开关频率/kHz20 相自感最大值/mH52 最小值/mH12 电枢与励磁绕组互感最大值/mH0.8 最小值/mH0.15
图9所示的分别为基于PI控制、采用双线性变换的准PR控制以及本文所提出的改进型准PR控制下DSEM的三相电流仿真结果,电机转速为3 000 r/min,负载转矩TL=2 N·m。由图9a可知,电流调节器仅采用PI控制时,由于DSEM本身非正弦的反电动势特性和PI调节器对谐波分量所在频率处增益较低,DSEM的三相电流波形畸变较为严重,含有较大的谐波分量。由图9b和图9c可知,电流调节器在分别引入基于双线性变换的准PR控制和本文所提出的改进型准PR控制后,DSEM的三相电流波形质量和正弦度得到了有效的提升。
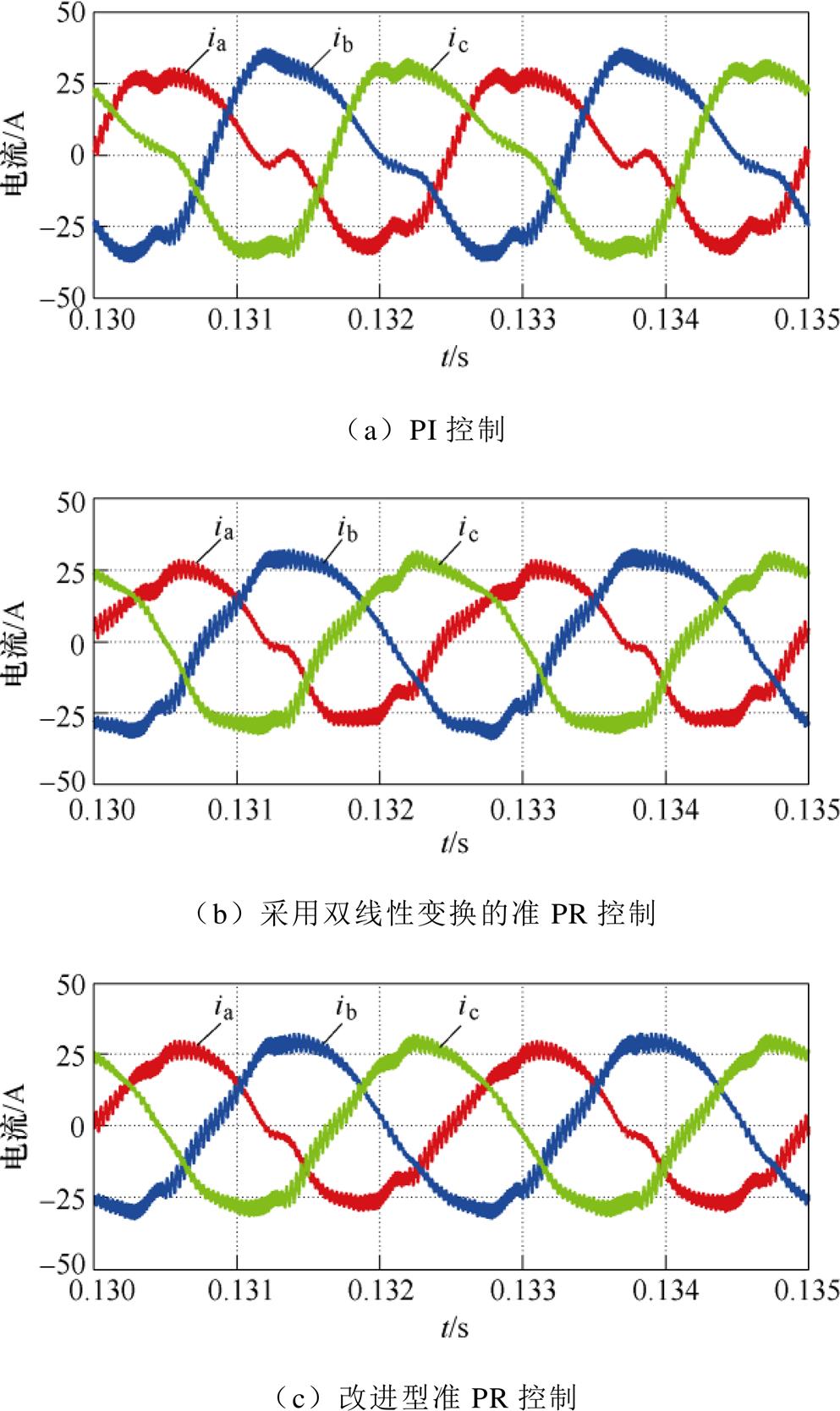
图9 DSEM的三相电流仿真结果
Fig.9 Simulation results of three-phase current of DSEM
图10所示分别为基于PI控制、采用双线性变换的准PR控制以及本文所提出的改进型准PR控制下DSEM的d轴和q轴电流仿真结果。由图10a可知,电流调节器仅采用PI控制时,d轴和q轴电流波动较大,存在较大的3次谐波;电流调节器在分别引入基于双线性变换的准PR控制和本文所提出的改进型准PR控制后,d轴和q轴电流波动得到了有效地抑制。基于双线性变换的准PR控制下d轴和q轴电流波动为±9 A;本文所提出的改进型准PR控制下d轴和q轴电流波动为±5 A。
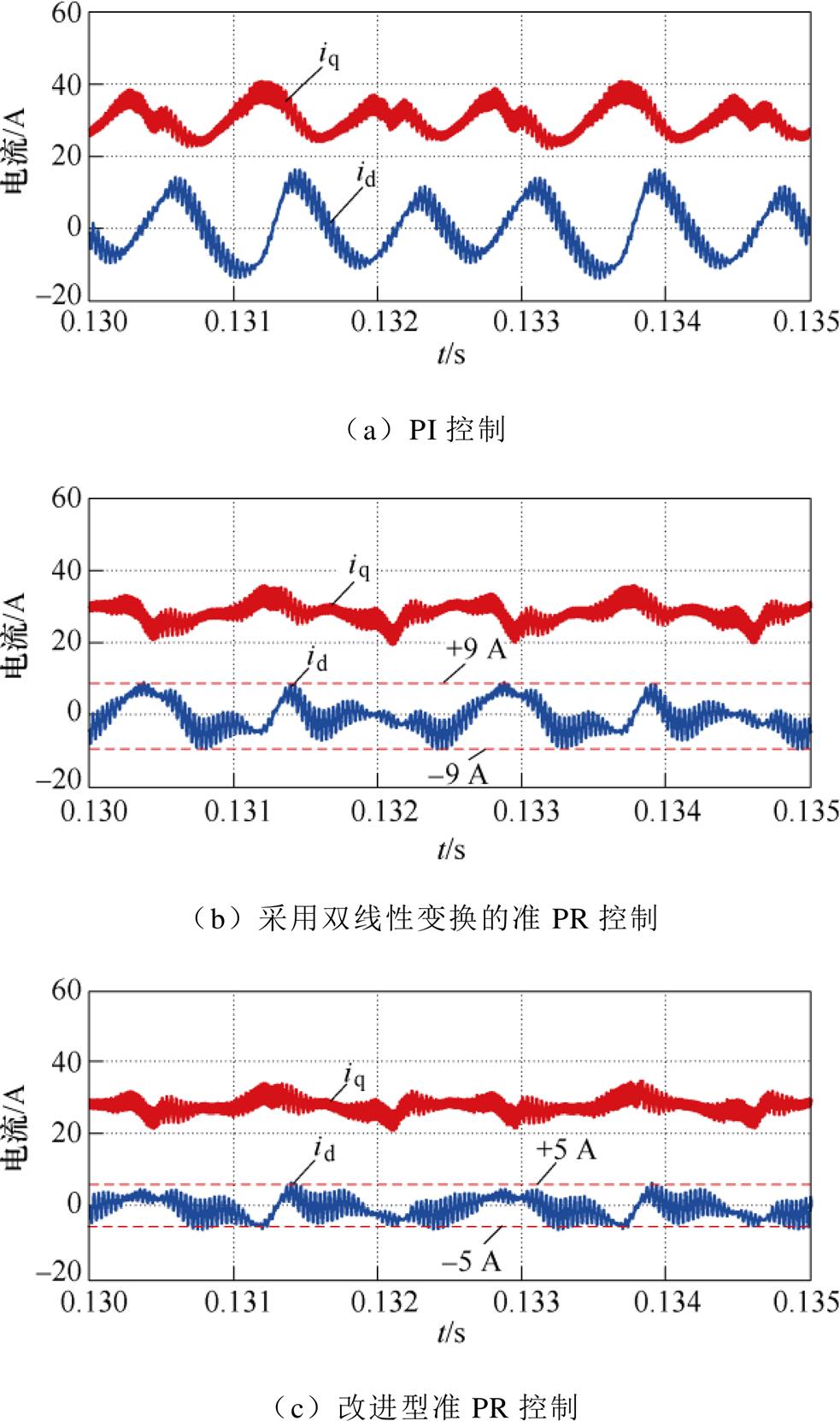
图10 DSEM的d轴和q轴电流仿真结果
Fig.10 Simulation results of the d-and q-axis current of the DSEM
图11所示分别为基于PI控制、采用双线性变换的准PR控制及本文所提出的改进型准PR控制下DSEM的相电流快速傅里叶变换(Fast Fourier Transform,FFT)仿真结果。电流调节器仅采用PI控制时,相电流的2次和4次谐波含量分别为23.11 %和13.74 %;电流调节器采用基于双线性变换的准PR控制时,相电流的2次和4次谐波含量分别为7.83 %和5.79 %;电流调节器采用改进型准PR控制时,相电流的2次和4次谐波含量分别为1.76 %和2.83 %。
综上所述,PI控制下的相电流存在较大的2次和4次谐波;基于双线性变换的准PR控制下相电流的2次和4次谐波含量有所降低,但由于双线性变换离散化导致的谐振频率偏差,相电流仍存在较大的2次和4次谐波;而本文所提出的改进型准PR控制可以消除谐振频率偏差,有效地抑制DSEM的2次和4次相电流谐波。
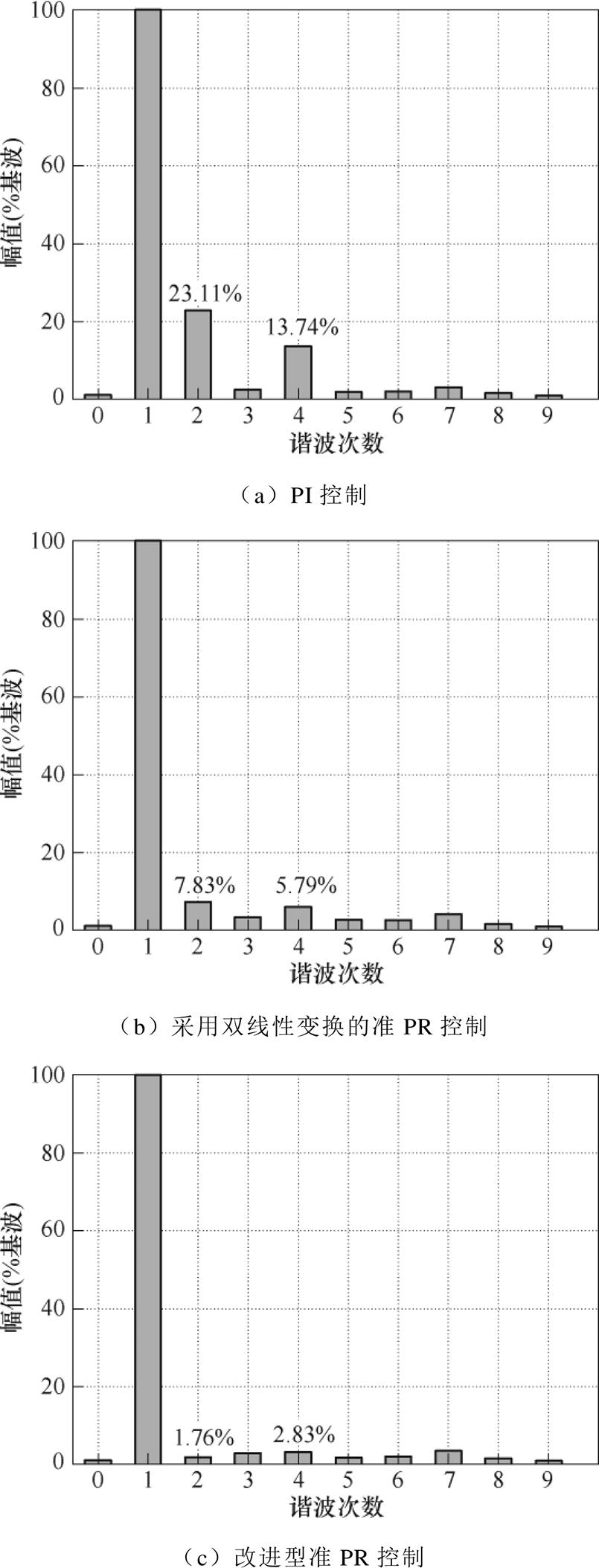
图11 DSEM三相电流FFT仿真结果
Fig.11 Simulation results of the harmonic spectrum of phase current of the DSEM
图12所示为PI控制、采用双线性变换的准PR控制以及本文所提出的改进型准PR控制下DSEM在不同转速工况的电流谐波含量仿真结果。由图12可知,电流谐波频率随着电机转速的增加而增加,从而导致三种控制方式下DSEM三相电流的2次和4次谐波含量逐渐增加。在低转速情况下,三种控制方式均可以获得较小的电流谐波含量。电机低转速运行时,采用双线性变换的准PR控制与本文所提出的改进型准PR控制下DSEM三相电流的2次和4次谐波含量均较为接近。然而,随着转速的增加,采用双线性变换的准PR控制器的谐振频率偏差逐渐增加,从而导致其电流谐波抑制效果逐渐变差。而本文所提出的改进型准PR控制在不同转速下均可以有效地补偿谐振频率偏差,因此在不同转速下均可以有效地抑制电流谐波。
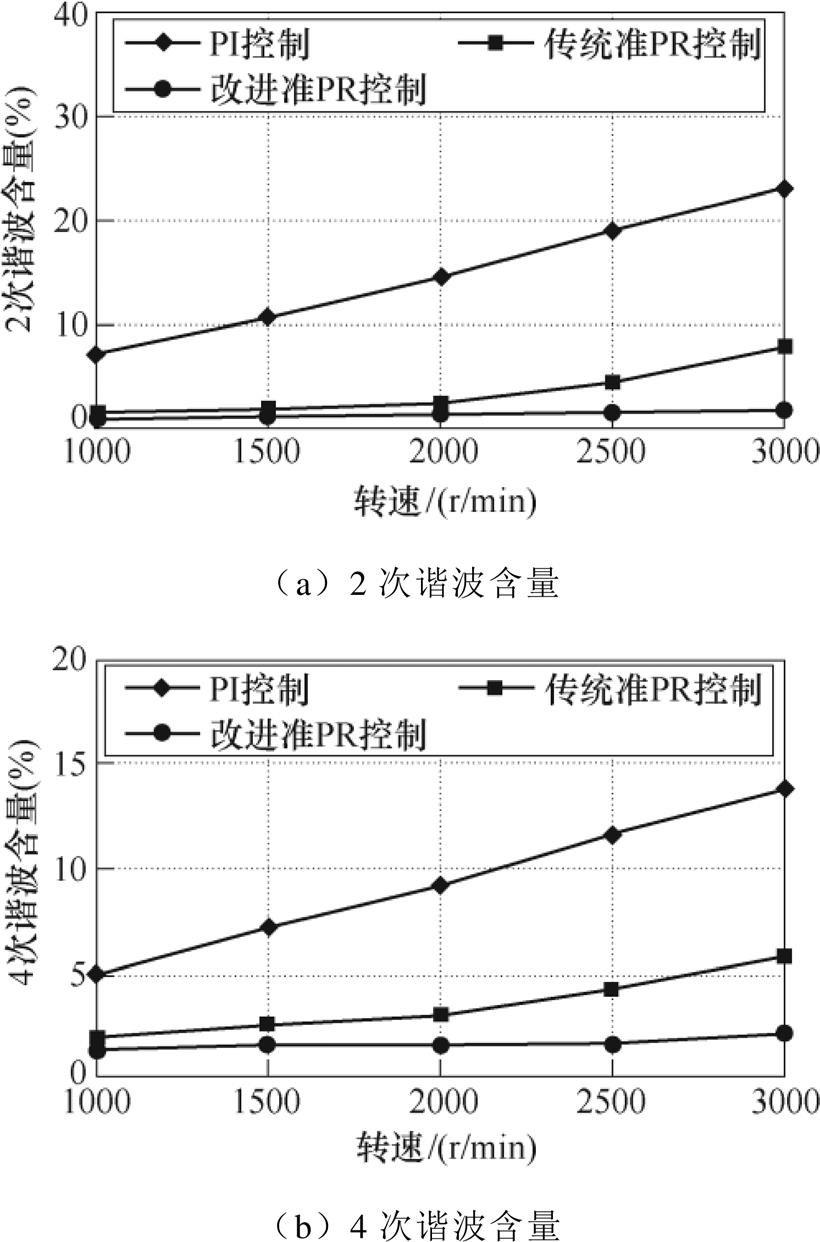
图12 不同转速下DSEM电流谐波含量仿真结果
Fig.12 Simulation results of the current harmonic of phase current of the DSEM under different speed
本节将根据2.2节的转矩模型、反电动势谐波的幅值和相位信息及相电流谐波的幅值和相位信息,分析相电流谐波对DSEM的平均转矩的影响。表2给出了转速为3 000 r/min时A相空载反电动势的基波、2次和4次谐波的幅值与相位。表3和表4分别给出了PI控制和改进型准PR控制下A相电流的基波、2次和4次谐波的幅值与相位。
表2 反电动势谐波幅值和相位的仿真数据
Tab.2 Simulation results of amplitude and phase of back-EMF harmonic
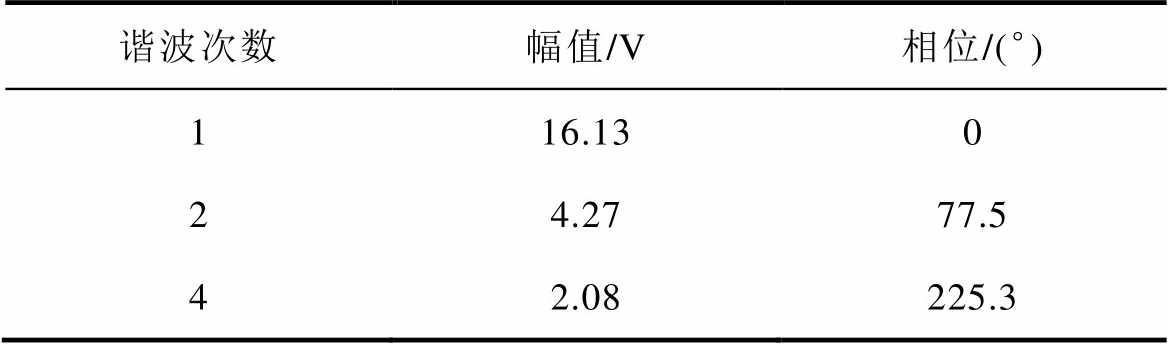
谐波次数幅值/V相位/(°) 116.130 24.2777.5 42.08225.3
表3 PI控制下电流谐波幅值和相位的仿真数据
Tab.3 Simulation results of amplitude and phase of the current harmonic under PI control

谐波次数幅值/A相位/(°) 128.070 25.89263.6 43.5829.1
表4 改进型准PR控制下电流谐波幅值和相位仿真数据
Tab.4 Simulation results of amplitude and phase of the current harmonic under improved quasi-PR control
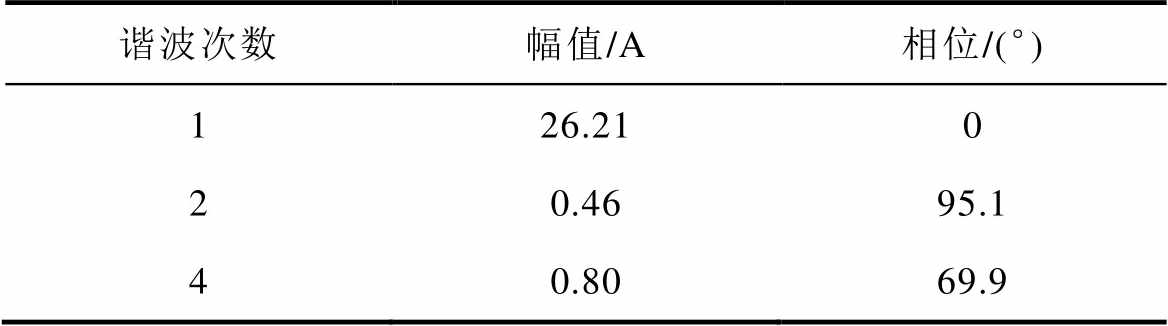
谐波次数幅值/A相位/(°) 126.210 20.4695.1 40.8069.9
由表2和表3可知,PI控制下反电动势基波和电流基波的相位差为0 °;反电动势的2次谐波和电流的2次谐波的相位差为186.1 °;反电动势的4次谐波和电流的4次谐波的相位差为196.2 °。因此,PI控制下反电动势基波和电流基波产生正转矩;反电动势的2次谐波和电流的2次谐波产生负转矩;反电动势的4次谐波和电流的4次谐波产生负转矩,PI控制下相电流存在的2次和4次谐波会与同次的反电动势谐波产生负转矩,降低了DSEM的平均输出转矩,因此需要对电流谐波进行抑制。
在负载转矩均为2 N·m的条件下,PI控制下的相电流有效值为22.27 A;改进型准PR控制下的相电流有效值为20.08 A。PI控制下DSEM的转矩电流比为0.089 8 N·m/A;改进型准PR控制下DSEM的转矩电流比为0.099 7 N·m/A,转矩电流比提升了11.02 %。对比以上结果可知,本文所提出的改进型准PR控制可以有效地补偿离散化导致的谐振频率偏差,抑制2次和4次电流谐波,降低2次和4次电流谐波产生的负转矩,从而提升DSEM的转矩输出能力。
为了进一步验证本文所提出的基于改进型准PR控制的DSEM电流谐波抑制方法的有效性,本文搭建了如图13所示的DSEM实验平台,包括DSEM样机、控制器、转矩传感器、发电机与发电负载等部件。本文实验结果中的d轴和q轴电流波形是通过数模转换器,将三相电流经坐标变换后的d轴和q轴电流值输出至示波器。

图13 DSEM实验平台
Fig.13 Experimental platform of the DSEM
图14所示为基于PI控制、采用双线性变换的准PR控制以及本文所提出的改进型准PR控制下DSEM的电流实验结果。由图14a可知,PI控制下DSEM的三相电流波形畸变较为严重,d轴和q轴电流存在明显的3次谐波分量,d轴电流的波动范围达到了±13 A。采用基于双线性变换的准PR控制时,相电流波形的正弦度得到了提高,d轴和q轴电流的3次谐波分量得到了抑制,d轴电流的波动范围降低至±10 A。采用改进型准PR控制时,d轴和q轴电流的3次谐波分量得到了进一步的抑制,d轴电流的波动范围降低至±6.5 A。
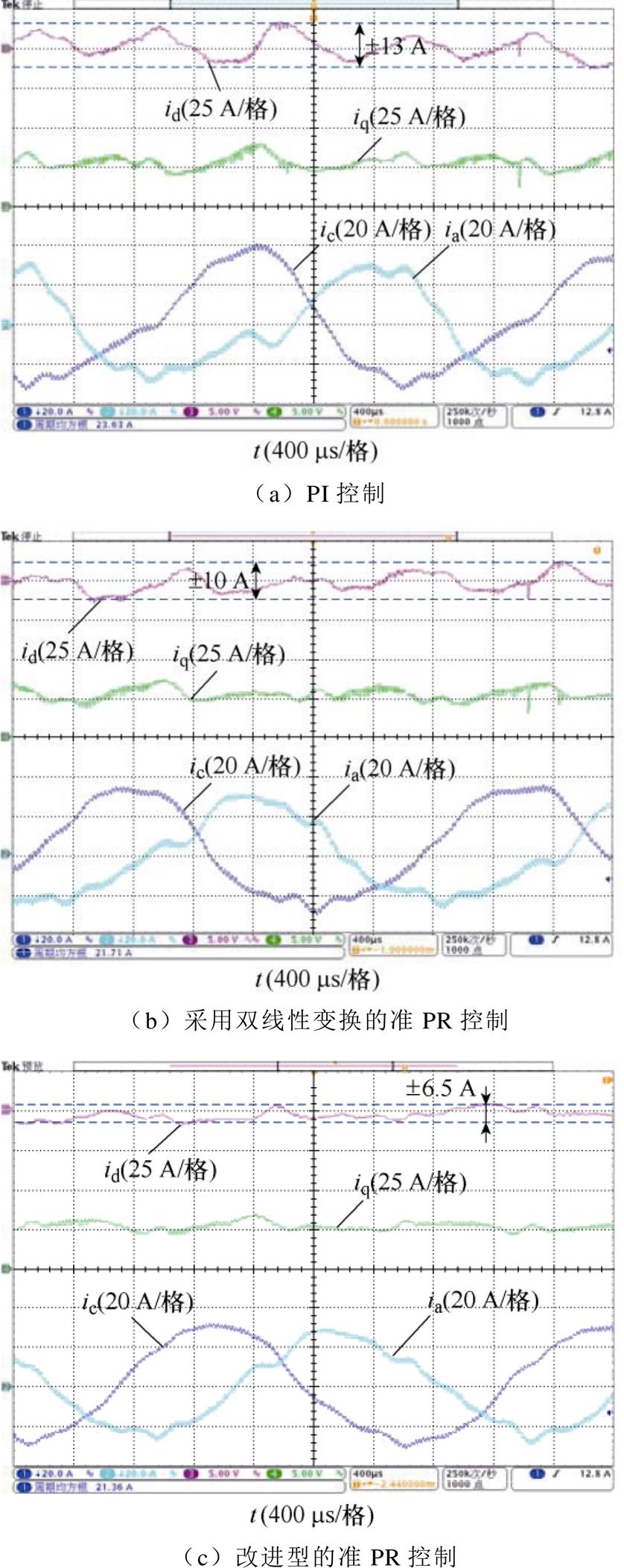
图14 DSEM电流控制实验结果(n=3 000 r/min, TL=2 N·m)
Fig.14 Experimental results of the phase current waveforms of the DSEM (n=3 000 r/min, TL=2 N·m)
图15所示为DSEM三相电流FFT实验结果。PI控制下,DSEM相电流的2次和4次谐波含量分别为23.50 %和14.16 %;采用基于双线性变换的准PR控制时,相电流的2次和4次谐波含量分别为7.87 %和6.08 %;电流调节器采用改进型准PR控制时,相电流的2次和4次谐波含量分别为1.76 %和3.31 %。DSEM电流的实验波形和谐波含量与仿真结果吻合度良好。
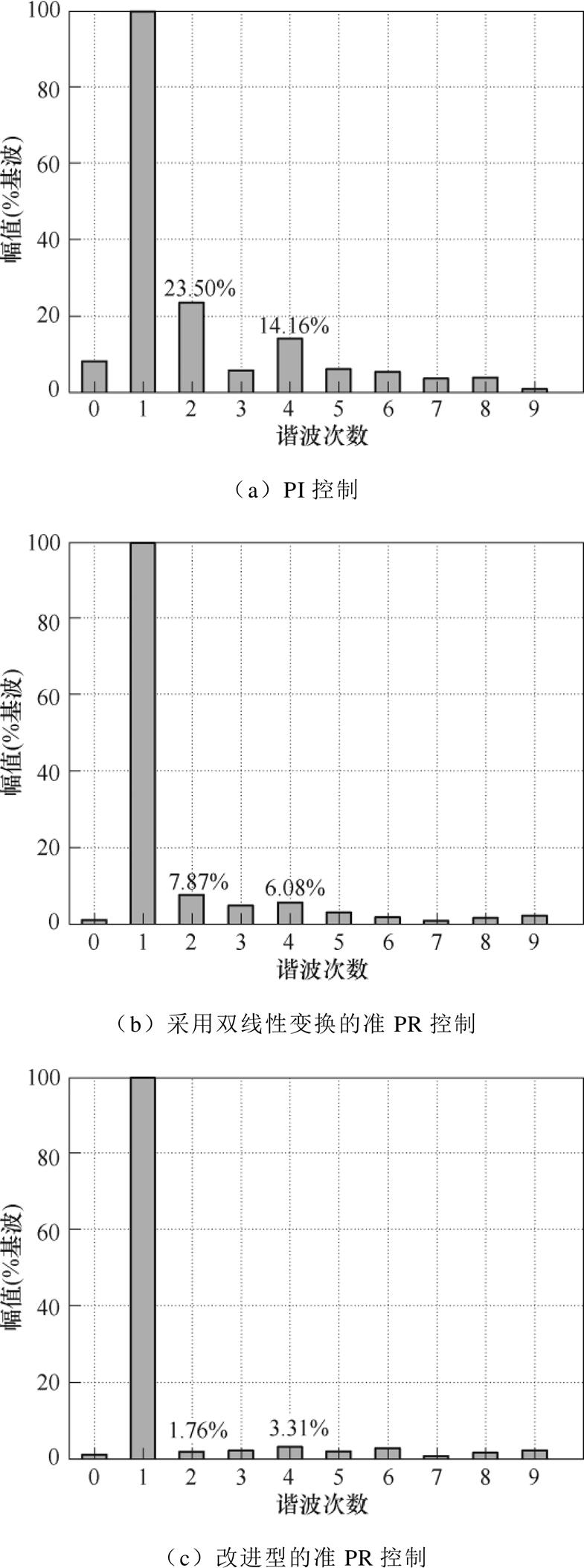
图15 DSEM相电流FFT实验结果(n=3 000 r/min, TL=2 N·m)
Fig.15 Experimental results of the harmonic spectrum of phase current of the DSEM (n=3 000 r/min, TL=2 N·m)
图16所示为PI控制、采用双线性变换的准PR控制以及本文所提出的改进型准PR控制下DSEM在不同转速下的电流谐波含量实验结果。由图16可知,三种控制方式在不同转速下的电流谐波含量实验结果的变化规律与图12中的仿真结果基本一致。因此,本文所提出的改进型准PR控制在不同转速下均可以有效地抑制电流谐波。

图16 不同转速下DSEM电流谐波含量实验结果
Fig.16 Experimental results of the current harmonic of phase current of the DSEM under different speed
反电动势谐波幅值和相位的实验数据见表5,PI控制和改进准PR控制下电流谐波幅值和相位的实验数据分别见表6和表7。由表5和表6可知,PI控制下反电动势基波和电流基波的相位差为0 °;反电动势的2次谐波和电流的2次谐波的相位差为186.6 °;反电动势的4次谐波和电流的4次谐波的相位差为144.1 °。因此,PI控制下相电流存在的2次和4次谐波会与同次的反电动势谐波产生负转矩,降低了DSEM的平均输出转矩。
表5 反电动势谐波幅值和相位的实验数据
Tab.5 Experimental results of amplitude and phase of back-EMF harmonic
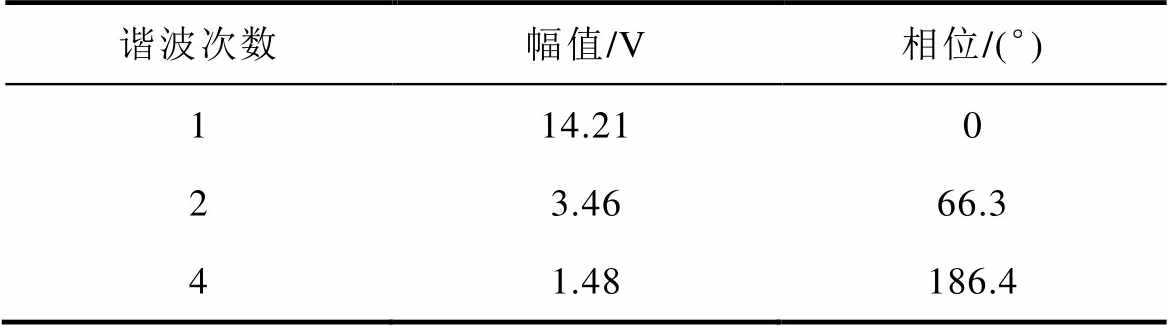
谐波次数幅值/V相位/(°) 114.210 23.4666.3 41.48186.4
表6 PI控制下电流谐波幅值和相位的实验数据
Tab.6 Experimental results of amplitude and phase of the current harmonic under PI control

谐波次数幅值/A相位/(°) 131.860 27.49252.9 44.5142.3
表7 改进型准PR控制下电流谐波幅值和相位实验数据
Tab.7 Experimental results of amplitude and phase of the current harmonic under improved quasi-PR control

谐波次数幅值/A相位/(°) 129.610 20.52-20.4 40.9874.1
由图14可知,负载转矩均为2 N·m的条件下,PI控制下的相电流有效值为23.63 A;改进型准PR控制下的相电流有效值为21.36 A。PI控制下DSEM的转矩电流比为0.084 6 N·m/A;改进型准PR控制下DSEM的转矩电流比为0.093 6 N·m/A,转矩电流比提升了10.6 %。
综合仿真与实验结果,本文所提出的基于改进型准PR控制的DSEM电流谐波抑制方法在不同转速下均可以有效地补偿双线性变换离散化导致的谐振频率偏差,抑制2次和4次相电流谐波,提升DSEM的转矩输出能力。
DSEM的非正弦反电动势特性会导致相电流含有较大的谐波分量,从而影响DSEM的转矩输出能力。针对该问题,本文提出了基于改进型准PR控制的DSEM电流谐波抑制方法。通过理论分析以及仿真和实验结果分析得出以下结论:
1)DSEM的电流谐波频率较高,传统准PR控制器经过双线性变换离散化后存在较大的谐振频率偏差,从而影响了电流谐波的抑制效果。
2)本文所提出的基于改进型准PR控制的DSEM电流谐波抑制方法可以有效地补偿谐振频率偏差,抑制DSEM的相电流谐波,PI控制下相电流的2次和4次谐波分别为23.50 %和14.16 %,改进型准PR控制下相电流的2次和4次谐波含量降低至1.76 %和3.31 %。
3)PI控制下DSEM相电流中不受控的2次和4次谐波会产生负转矩,从而降低电机的转矩输出能力,本文所提出的改进型准PR控制通过抑制电流谐波,可以有效地消除电流谐波产生的负转矩,使得电机的转矩电流比提升10.6 %。
参考文献
[1] Liu Chuang, Zhou Bo, Yan Yangguang. Imple- mentation and study of a novel doubly salient structure starter/generator system[J]. Chinese Journal of Aeronautics, 2002, 15(3): 150-155.
[2] Yu Li, Zhang Zhuoran, Chen Zhihui, et al. Analysis and verification of the doubly salient brushless DC generator for automobile auxiliary power unit appli- cation[J]. IEEE Transactions on Industrial Electronics, 2014, 61(12): 6655-6663.
[3] Benzaquen J, He Jiangbiao, Mirafzal B. Toward more electric powertrains in aircraft: technical challenges and advancements[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(3): 177-193.
[4] Jia Wanying, Xiao Lan, Wang Chuyang, et al. Self- tuning control of advanced angles for doubly salient motor drive system[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2020, 8(2): 1236-1247.
[5] Wang Yin, Zhang Zhuoran, Liang Rui, et al. Torque density improvement of doubly salient electro- magnetic machine with asymmetric current control[J]. IEEE Transactions on Industrial Electronics, 2016, 63(12): 7434-7443.
[6] Bian Zhangming, Zhang Zhuoran, Yu Li. Syn- chronous commutation control of doubly salient motor drive with adaptive angle optimization[J]. IEEE Transactions on Power Electronics, 2020, 35(6): 6070-6081.
[7] Zhang Jian, Xia Yiwen, Zhang Zhuoran, et al. Influence of driving mode on loss characteristics of doubly salient brushless motor with rectangular wire armature winding[J]. IEEE Transactions on Magnetics, 2022, 58(2): 1-6.
[8] Yu Zixiang, Li Dawei, Kong Wubin, et al. New optimal current control strategy for six-phase DC- biased vernier reluctance machines considering distorted EMF[J]. IEEE Transactions on Power Electronics, 2018, 33(12): 10633-10645.
[9] 肖阳, 宋金元, 屈仁浩, 等. 变频谐波对电机振动噪声特性的影响规律[J]. 电工技术学报, 2021, 36(12): 2607-2615.
Xiao Yang, Song Jinyuan, Qu Renhao, et al. The effect of harmonics on electromagnetic vibration and noise characteristic in inverter-duty motor[J]. Transa- ctions of China Electrotechnical Society, 2021, 36(12): 2607-2615.
[10] 陈少先, 丁树业, 申淑锋, 等. 船舶用表贴式永磁同步电机的电磁振动分析与抑制[J]. 电工技术学报, 2023, 37(5): 1275-1286, 1298.
Chen Shaoxian, Ding Shuye, Shen Shufeng, et al. Analysis and suppression of electromagnetic vibration of surface mounted permanent magnet synchronous motor for ships[J]. Transactions of China Electro- technical Society, 2023, 37(5): 1275-1286, 1298.
[11] 石恒星, 陈世元. 转子斜槽电磁式双凸极电机的有限元分析[J]. 微电机, 2013, 46(2): 16-19.
Shi Hengxing, Chen Shiyuan. Finite element analysis of doubly salient electro-magnetic motor based on rotor skewing[J]. Micromotors, 2013, 46(2): 16-19.
[12] Kong Wubin, Yu Zixiang, Li Dawei, et al. Com- parative study of harmonic current suppression control strategies for six-phase DC-biased vernier reluctance machines[J]. IEEE Transactions on Indu- stry Applications, 2018, 54(6): 5843-5855.
[13] 李帅, 孙立志, 刘兴亚, 等. 永磁同步电机电流谐波抑制策略[J]. 电工技术学报, 2019, 34(增刊1): 87-96.
Li Shuai, Sun Lizhi, Liu Xingya, et al. Current harmonics suppression strategies of permanent mag- net synchronous motor[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 87-96.
[14] 武永燎, 李红, 宋欣达, 等. 基于改进型重复控制器的永磁同步电机电流谐波抑制方法研究[J]. 电工技术学报, 2019, 34(11): 2277-2286.
Wu Yongliao, Li Hong, Song Xinda, et al. Suppression of harmonic current in permanent magnet syn- chronous motors using improved repetitive con- troller[J]. Transactions of China Electrotechnical Society, 2019, 34(11): 2277-2286.
[15] 王贺超, 夏长亮, 阎彦, 等. 基于谐振控制的表贴式永磁同步电机弱磁区电流谐波抑制[J]. 电工技术学报, 2014, 29(9): 83-91.
Wang Hechao, Xia Changliang, Yan Yan, et al. Current harmonic suppression in the flux-weakening control of surface permanent magnet synchronous motors using resonant controllers[J]. Transactions of China Electrotechnical Society, 2014, 29(9): 83-91.
[16] Hu Mingjin, Hua Wei, Wang Zuo, et al. Selective periodic disturbance elimination using extended harmonic state observer for smooth speed control in PMSM drives[J]. IEEE Transactions on Power Electronics, 2022, 37(11): 13288-13298.
[17] 徐卿瀚, 蒙显辉, 杨苓, 等. 直流微电网储能系统的NF+QPR+LPF双闭环2次谐波电流抑制方法[J]. 电工技术学报, 2022, 37(20): 5188-5200.
Xu Qinghan, Meng Xianhui, Yang Ling, et al. NF+ QPR+LPF double closed loop second harmonic current suppression method for DC microgrid energy storage system[J]. Transactions of China Electro- technical Society, 2022, 37(20): 5188-5200.
[18] 麦志勤, 肖飞, 刘计龙, 等. 基于准比例谐振级联PI的双三相永磁同步电机谐波电流抑制策略[J]. 电工技术学报, 2018, 33(24): 5751-5759.
Mai Zhiqin, Xiao Fei, Liu Jilong, et al. Harmonic Current suppression strategy of dual three-phase permanent magnet synchronous motor based on quasi proportional resonant cascading PI[J]. Transactions of China Electrotechnical Society, 2018, 33(24): 5751- 5759.
[19] 杨才伟, 王剑, 游小杰, 等. 二阶广义积分器锁频环数字实现准确性对比[J]. 电工技术学报, 2019, 34(12): 2584-2596.
Yang Caiwei, Wang Jian, You Xiaojie, et al. Accuracy comparison of digital implementation on the second-order generalized integrator frequency- locked loop[J]. Transactions of China Electro- technical Society, 2019, 34(12): 2584-2596.
[20] 刘亚静, 段超. 全数字自适应滤波器不同离散结构的性能对比分析[J]. 电工技术学报, 2021, 36(20): 4339-4349.
Liu Yajing, Duan Chao. Performance comparison and analysis of all-digital adaptive filter with different discrete methods[J]. Transactions of China Electro- technical Society, 2021, 36(20): 4339-4349.
[21] 曾君, 岑德海, 陈润, 等. 针对直流偏移和谐波干扰的单相锁相环[J]. 电工技术学报, 2021, 36(16): 3504-3515.
Zeng Jun, Cen Dehai, Chen Run, et al. Single-phase phase-locked loop for DC offset and harmonic inter- ference[J]. Transactions of China Electrotechnical Society, 2021, 36(16): 3504-3515.
[22] 魏艺涵, 罗响, 朱莉, 等. 基于比例谐振控制器的高凸极率永磁同步电机电流谐波抑制策略研究[J]. 中国电机工程学报, 2021, 41(7): 2526-2538.
Wei Yihan, Luo Xiang, Zhu Li, et al. Research on current harmonic suppression strategy of high saliency ratio permanent magnet synchronous motor based on proportional resonance controller[J]. Pro- ceedings of the CSEE, 2021, 41(7): 2526-2538.
[23] 王恩德, 黄声华. 表贴式永磁同步电机伺服系统电流环设计[J]. 中国电机工程学报, 2012, 32(33): 82-88, 179.
Wang Ende, Huang Shenghua. Current regulator design for surface permanent magnet synchronous motor servo systems[J]. Proceedings of the CSEE, 2012, 32(33): 82-88, 179.
[24] 杨淑英, 刘世园, 李浩源, 等. 永磁同步电机无位置传感器控制谐波抑制策略研究[J]. 中国电机工程学报, 2019, 39(20): 6075-6084, 6188.
Yang Shuying, Liu Shiyuan, Li Haoyuan, et al. Research on harmonic suppression strategy of position sensorless control for permanent magnet synchronous motor[J]. Proceedings of the CSEE, 2019, 39(20): 6075-6084, 6188.
[25] Huang Mingfei, Deng Yongting, Li Hongwen, et al. Torque ripple suppression of PMSM using fractional- order vector resonant and robust internal model control[J]. IEEE Transactions on Transportation Electrification, 2021, 7(3): 1437-1453.
[26] Hu Mingjin, Hua Wei, Ma Guangtong, et al. Improved current dynamics of proportional-integral-resonant controller for a dual three-phase FSPM machine[J]. IEEE Transactions on Industrial Electronics, 2021, 68(12): 11719-11730.
Abstract The doubly salient electro-magnetic machine (DSEM) has been proposed by introducing additional field windings on the stator of the switched reluctance motor (SRM). Therefore, the DSEM has a simple and reliable structure and flexible flux-regulation ability, suitable for wide-speed range operation. However, due to the non-sinusoidal back electromotive force (EMF) of DSEM, the phase current has significant 2nd and 4th current harmonics under the conventional sinusoidal current control method. The 2nd and 4th current harmonics will deteriorate the torque capability of the DSEM. Meanwhile, the high harmonic frequency of the DSEM makes the conventional quasi-proportional resonant (PR) controller have considerable resonance frequency deviation under the conventional discretization method. Thus, this paper proposes an improved quasi-PR control based on the discretization method with zero resonance frequency deviation.
Firstly, the production mechanism of the current harmonics is analyzed with the help of the back-EMF characteristics of DSEM. Then, the average torque model of the DSEM, considering the current and back-EMF harmonics, is derived. Secondly, the operation principle of quasi-PR control is introduced, and the influence of the control parameter is analyzed through a bode diagram. Then, the equation of resonance frequency deviation under the conventional bilinear transform is derived. The discretization method with zero resonance frequency deviation is proposed by introducing the compensation coefficient based on the bilinear transform. Furthermore, the improved discretization equation is simplified by replacing the tangent function with a polynomial function. The amplitude-frequency response shows that the improved quasi-PR controller can effectively compensate for the resonance frequency deviation. Finally, the current harmonics suppression method of DSEM based on improved quasi-PR control is introduced, and the simulation and experiments are carried out to verify the performance.
The performance of improved quasi-PR control is compared with the performance of PI control and conventional quasi-PR control through simulation and experimental results. Firstly, the simulation and experimental results at rated speed show that the phase current has nonnegligible 2nd and 4th harmonics under PI control. The conventional quasi-PR control can reduce the phase current harmonics to some extent. However, due to resonance frequency deviation, there is still considerable phase current harmonics under conventional quasi-PR control. The improved quasi-PR control can effectively suppress the phase current harmonics by compensating the resonance frequency deviation. Secondly, the simulation and experimental results at different speeds show that the improved quasi-PR control proposed in this paper can obtain much lower phase current harmonics than PI control and conventional quasi-PR control. Finally, based on the torque model, the influence of current harmonics on average torque is analyzed. The results show that the uncontrollable current harmonics under PI control contribute to the negative average torque. The improved quasi-PR control can eliminate the negative average torque by suppressing the current harmonics. Therefore, the improved quasi-PR control can suppress the current harmonics and enhance the torque capability of DSEM.
The following conclusions can be drawn from the simulation and experimental results: (1) The high fundamental frequency of DSEM leads to significant resonance frequency deviation and deteriorates the current harmonics suppression performance of conventional quasi-PR control. (2) The improved quasi-PR control proposed in this paper can compensate for the resonance frequency deviation and suppress current harmonics. The 2nd and 4th harmonics contents under PI control are 23.50 % and 14.16 %. The 2nd and 4th harmonic contents under improved quasi-PR control are 1.76 % and 3.31 %. (3) The uncontrollable current harmonics under PI control contribute negative average torque. The improved quasi-PR control can effectively suppress the current harmonics, and the torque ampere ratio of DSEM can be enhanced by 10.6 %.
keywords:Current harmonic, doubly salient electro-magnetic machine, quasi proportional resonant control, resonance frequency deviation, torque output capability
国家自然科学基金面上项目(51977108)和国家自然科学基金重点项目(51737006)资助。
收稿日期 2022-05-31
改稿日期 2022-08-10
DOI: 10.19595/j.cnki.1000-6753.tces.220981
中图分类号:TM352
陈 旭 男,1997年生,博士研究生,研究方向为电励磁双凸极电机驱动控制技术。E-mail: nuaachenxu@nuaa.edu.cn
张卓然 男,1978年生,教授,博士生导师,研究方向多电飞机电气系统、新能源发电与电驱动技术。E-mail: apsc-zzr@nuaa.edu.cn(通信作者)
(编辑 崔文静)