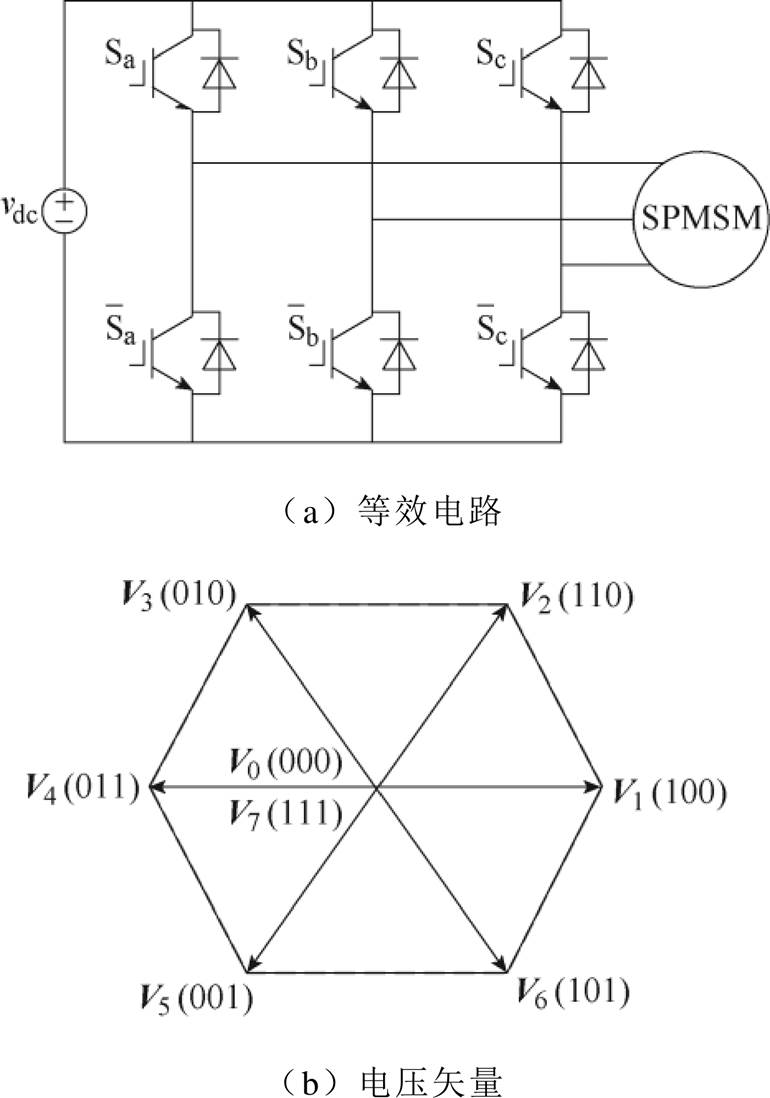
图1 2L-VSI等效电路和电压矢量
Fig.1 2L-VSI equivalent circuit and voltage vector
摘要 为了解决传统的永磁同步电机双矢量模型预测电流控制中开关频率高、计算量大的问题,提出一种固定开关频率双矢量模型预测控制策略。利用传统的双矢量模型预测控制的参考电压矢量所在扇区的变化规律,通过构造新的电压矢量选择表,将电压矢量的选择范围从7个降为2个;同时提出一种基于d、q轴电压差的作用时间计算方法,以降低计算量和固定开关频率。最后,通过搭建仿真模型和永磁同步电机实验平台,对传统的双矢量模型预测电流控制策略和所提控制策略进行对比分析和验证,仿真和实验结果显示出该文所提控制策略相对传统的双矢量模型预测电流控制策略的优越性,验证了其可行性和正确性。
关键词:永磁同步电机 模型预测控制 双矢量 固定开关频率
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)由于具有功率因数高、可靠性高、结构简单等优点[1],在舰船电力推进、电动汽车驱动、航空航天等领域被广泛应用[2]。目前,永磁同步电机常用的两种高性能调速控制方法分别是:磁场定向控制(Field Oriented Control, FOC)和直接转矩控制(Direct Torque Control, DTC)。FOC又称矢量控制,其方法是通过坐标变换将三相交流控制转换为对d、q轴电流的控制,实现转矩和励磁的独立控制[3]。但在实现数字化的过程中,控制器的输出滞后于系统电流的变化,从而影响电流的静、动态响应[4]。DTC方法采用非线性滞环控制器[5],基于一种查表逻辑选择出合适的开关状态,从而实现对电机转矩和磁链的独立控制,其特点是控制方法简单、动态响应快、鲁棒性强[6],但当电机低速运行时,定子电阻压降大且磁链计算误差大,从而使得调速范围窄。
模型预测控制(Model Predictive Control, MPC)方法是近些年兴起的控制策略,具有动态响应快、电流控制性能好、易于考虑系统线性约束、控制灵活等优点。随着功能更强大的微处理器的快速发展,MPC已经成为高性能电机驱动器的成熟控制策略之一[7]。
有限控制集模型预测电流控制(Finite Control Set Model Predictive Current Control, FCS-MPCC)是MPC的一种,FCS-MPCC具有控制效果好、鲁棒性强等优点[8]。目前,已有文献对FCS-MPCC在PMSM上的应用进行了研究。FCS-MPCC算法应用于两电平电压源型逆变器(Two-Level Voltage Source Inverter, 2L-VSI)供电的永磁同步电机驱动器,其控制集仅包含8个基本电压矢量,即6个有源电压矢量和两个零电压矢量,且在每个控制周期中只输出一个电压矢量,导致相对较高的稳态纹 波[9]。为此,文献[10]提出了双矢量模型预测电流控制(Dual Vector Model Predictive Current Control, D-MPCC)策略,通过在一个控制周期中输出两个电压矢量降低稳态纹波,但是开关频率较高,且计算量非常大,易引起电机的铁、铜损耗增加,可能会诱发不良的谐波振荡,给电机的正常运行带来风险[11]。因此,在保证系统稳态性能的前提下如何固定开关频率和减小计算量成为了研究热点。
为了解决这些问题,已有国内外学者进行了研究。文献[12]利用电压矢量角来判断电压矢量所在扇区,以减小开关状态的判定数量,降低计算复杂度和缩短开关周期,但是未考虑固定开关频率的问题。文献[13]在模型预测控制目标方程中将系统功率变换器等效开关次数纳入约束条件,有效降低了变换器的开关频率,减小了功率驱动装置的温升,进一步提升了永磁同步电机驱动用功率变换器的稳定性及可靠性,但是控制器的计算过程过于复杂,对微处理器的性能提出了很高的要求。文献[14]将空间电压矢量平面以30 °为间隔划分为12个扇区,并且加入对开关状态切换的限制,有效降低了开关频率,提高了系统的稳态和动态性能,但是增加扇区加大了计算负担。文献[15]提出了一种具有可变死区时间的模型预测控制,将死区效应等效于电流方向的电压矢量,有效降低了平均开关频率,但并未考虑如何减小系统的计算量。文献[16]通过将d轴和q轴电流、输出电容电压和开关惩罚项包含在一个统一的代价函数中,通过选取合理的开关惩罚项权系数,可实现开关频率的优化设计,但是系数的选择需要通过大量仿真获取数据,计算量较大。
文献[17]提出了一种三矢量FSF-SPCC控制器,利用七段式支持向量机(Support Vector Machine, SVM)对称发波原理生成脉宽,从而实现固定开关频率,但是算法实现的遍历过程非线性不连续,故无法利用线性理论严格分析系统稳定性。文献[18]在栅极信号的每个上升沿和下降沿之间测量周期,通过扩展周期控制技术来实现开关频率调节,实现固定开关频率,但是测量周期的方法过于复杂,不利于实际应用。文献[19]提出了一种开关直接模型预测控制方法,通过控制开关周期并将其添加到成本函数中,实现了固定开关频率,但是增加的开关频率调节项在瞬态操作期间强制进行不必要的开关转换,造成瞬态性能下降。文献[20]采用离散自适应的滞后电流控制来固定开关频率,将优化电流误差与可变滞环带宽进行比较的结果输出馈送到触发器来产生开关信号,实现了恒定的开关频率。然而,该方法涉及用于比较的大量计算,这导致系统复杂性和计算负担的增加。
针对上述分析,为了减小计算量和固定开关频率,本文提出了一种固定开关频率的双矢量模型预测控制(Dual Vector Model Predictive Control with Fixed Switching Frequency, FD-MPC)策略。首先构造一个高效的电压矢量选择表,把电压矢量的选择范围由7个降为2个,以减小计算量;其次提出一种基于d、q轴电压差的作用时间计算方法,使得电压矢量的持续时间恒为正值,从而固定开关频率;最后通过仿真和实验证明本文所提方法的有效性和可行性。
本文以表贴式永磁同步电机(Surface-mounted Permanent Magnet Synchronous Motor, SPMSM)为研究对象,它的特点是具有相等的d、q轴电感。在本文的驱动系统中,SPMSM的电压由2L-VSI提供,如图1a所示。这种拓扑结构可以提供8个基本电压矢量,包括6个有效电压矢量和两个零矢量,如图1b所示。
图1 2L-VSI等效电路和电压矢量
Fig.1 2L-VSI equivalent circuit and voltage vector
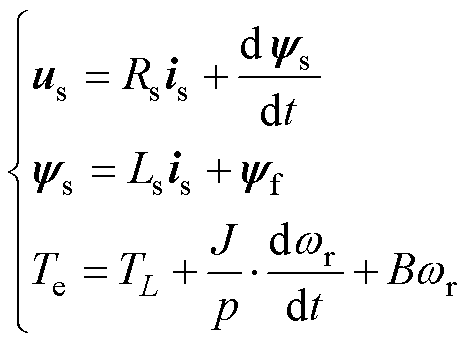
SPMSM在三相静止坐标系下的数学模型为
 (1)
(1)
式中,us、ys、yf、is分别为定子电压矢量、定子磁链矢量、转子磁链矢量和定子电流矢量;Rs、Ls、Te、p分别为定子相电阻、同步电感、电磁转矩和磁极对数。
为了简化模型,可以使用Park变换实现从三相静止坐标系到旋转坐标系的变换。因此可以得到dq坐标系下的SPMSM的模型为
 (2)
(2)
式中,id、iq和ud、uq分别为d轴和q轴上的定子电流和定子电压;B、J、TL、wr分别为SPMSM的阻尼系数、转动惯量、负载转矩、机械角速度。
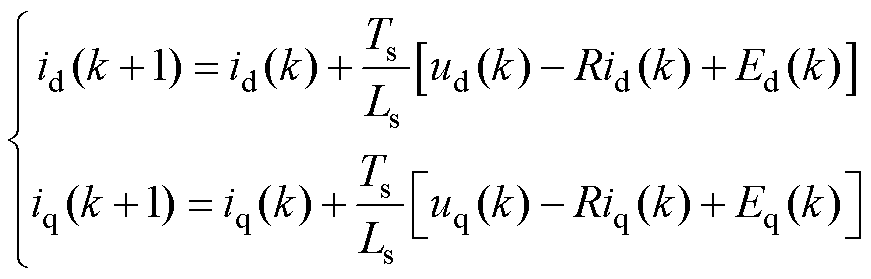
利用前向欧拉法,对式(2)中的电流表达式进行离散化,可以得到电流预测方程为
 (3)
(3)
其中


传统D-MPCC策略在一个控制周期中输出一个最优电压矢量和一个次优电压矢量,假设最优电压矢量为um,次优电压矢量为un,通过合理分配电压矢量持续时间,可以合成一个方向和幅值均可调节的虚拟电压矢量。由于两个零矢量对电机的控制效果相同,所以只考虑一种即可,这里假设零矢量为u0。传统D-MPCC首先在6个电压矢量中选出能够使价值函数最小的电压矢量作为um,然后,根据um确定候选电压矢量组合,选取原则为除了um,其余电压矢量均可作为un的候选矢量。
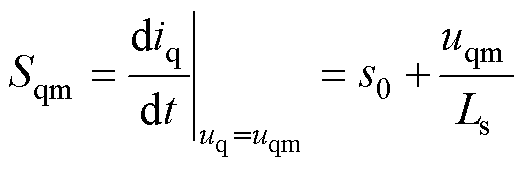
根据式(2)可得到um和un作用时q轴电流变化率Sqm和Sqn分别为
 (4)
(4)
 (5)
(5)
式中,s0为零电压矢量u0作用时iq的斜率;s0的表达式为
 (6)
(6)
D-MPCC策略中k+1时刻的iq(k+1)为
 (7)
(7)
式中,tm为um的作用时间。
根据q轴电流无差拍原则可以得到
 (8)
(8)
根据式(7)和式(8),可得um和un的作用时间tm、tn分别为
 (9)
(9)
则对应的虚拟电压矢量的d、q轴分量为
 (10)
(10)
最后将5个虚拟电压矢量依次代入预测模型中去,得到id(k+1)、iq(k+1),选出使价值函数最小的虚拟矢量作为输出以控制2L-VSI。价值函数的表达式为
 (11)
(11)
式中, 和
和 分别为d轴和q轴电流的参考值;id和iq分别为基于负载模型的d轴和q轴电流的预测值。
分别为d轴和q轴电流的参考值;id和iq分别为基于负载模型的d轴和q轴电流的预测值。
D-MPCC解决了单矢量模型预测电流控制中当最优电压矢量作用后的电流预测值与给定值存在较大偏差时存在稳态纹波大、系统稳态性能较差的问题,但是D-MPCC存在开关频率高且计算量大的问题,限制了其实际应用。
传统的D-MPCC策略计算量大、开关频率不固定的原因是需要循环计算的电压矢量过多,而这些电压矢量之间无特定关系,因此可以从优化电压矢量数量的角度来降低计算量和固定开关频率。
最优电压矢量的选择与参考电压矢量所在扇区密切相关,所以有必要对D-MPCC参考电压矢量所在的扇区进行分析。图2为在每个控制周期中D- MPCC的参考电压矢量所在扇区的变化情况,从图2a可以看出,在每个控制周期内的参考电压矢量所在的扇区总是以固定的模式变化,从扇区Ⅰ到第扇区Ⅵ,依次循环,即参考电压矢量在图1b所示的电压矢量图不停的做逆时针旋转。图2b为图2a放大之后的情况,从图中可以看出,随着控制周期的变化,参考电压矢量所在的扇区可能不变,或者只变换到相邻的扇区。例如在图2b中,参考电压矢量在某些时刻一直位于扇区Ⅰ和扇区Ⅵ中,在另一些时刻会从扇区Ⅰ变换到扇区Ⅱ。
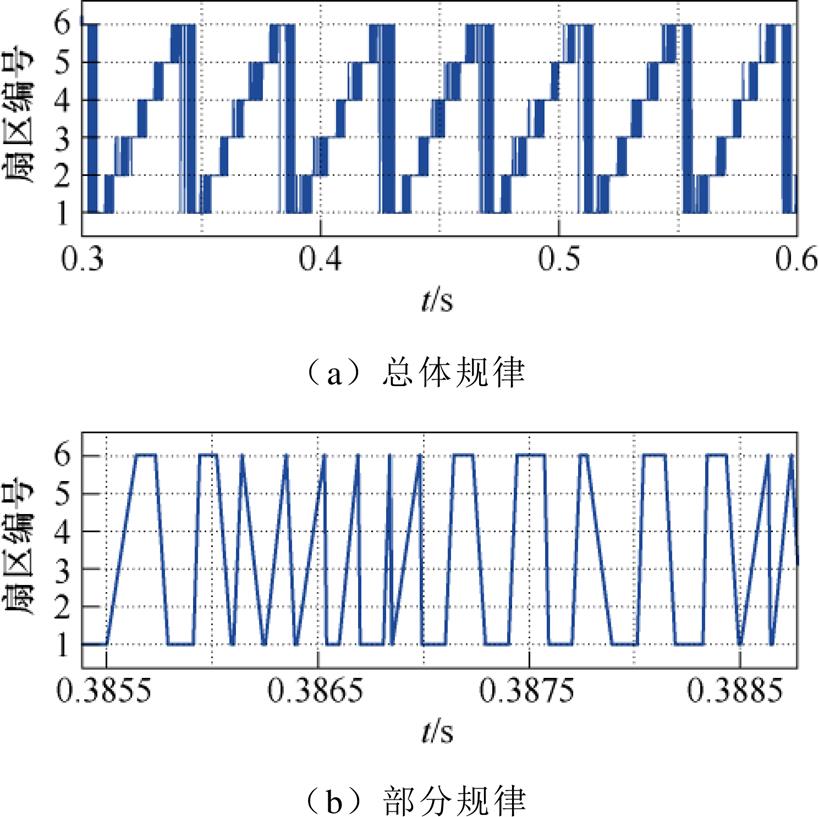
图2 参考电压矢量所在扇区
Fig.2 Sector of reference voltage vector
在传统D-MPCC中,由于存在大量可能的电压矢量组合,最终确定最佳组合给处理器带来了巨大的计算负担;选择电压矢量对应的开关状态时,存在两种情况,分别为一相和两相的开关发生跳变,造成开关频率过高。经过对参考电压矢量所在扇区的分析可知,随着控制周期的变化,参考电压矢量只会在相邻的扇区变化或者不变。而在电压矢量图中,最优电压矢量在相邻的扇区中变换时只会改变一相开关的状态,所以本文提出的FD-MPC使用一个新的切换表来实现um和un的快速选择,切换表见表1。
与传统的D-MPCC方案相比,FD-MPC的电压矢量选择被大大简化。假设第k个控制周期选择的um为V1,则第k个控制周期un的选择范围是V2和V6,故两种备选的电压矢量组合为:(V1、V2)和(V1、V6);如果该控制周期中的第k个控制周期un已知,那么第k+1个控制周期中寻找um的方法也是一样的。这样寻找um和un需要循环的次数由7次降为2次,有效降低了计算量,节省了处理器软件资源。
表1 电压矢量切换表
Tab.1 Voltage vector switching table

上一个最优电压矢量下一个候选电压矢量组合 V1(100)V2(110), V6(101) V2(110)V1(100), V3(010) V3(010)V2(110), V4(011) V4(011)V3(010), V5(001) V5(001)V4(011), V6(101) V6(101)V1(100), V5(001)
传统的D-MPCC选择最优电压矢量的价值函数以电流误差为基准,需将电压矢量经式(3)转化为d、q轴电流,计算量较大。在本文提出的FD-MPC中,价值函数以电压误差为基准,将式(3)代入式(11)中,可以得到
 (12)
(12)
式中, 和
和 分别为d、q轴的参考电压;ud和uq为待筛选的电压矢量的d、q轴分量。
分别为d、q轴的参考电压;ud和uq为待筛选的电压矢量的d、q轴分量。
采用式(12)的价值函数,可以直接用候选的电压矢量与参考电压矢量进行比较,减小了计算量,FD-MPC流程如图3所示。
虽然每次切换开关状态只有两个备选电压矢量,但两个备选的电压矢量不是恒定不变的。在每次切换开关状态之前,备选电压矢量的范围都会被重新定义,备选电压矢量范围如图4所示。假设第k-1个控制周期选择的un为V1,且第k个控制周期的参考电压矢量在扇区Ⅱ。
图4a为参考电压矢量靠近V2的一般情况,在不考虑零矢量的情况下,则根据一相开关跳变原则,FD-MPC在第k个控制周期选择的um一定是V2,un为V3,此时D-MPCC选择的最优电压矢量与FD-MPC相同;图4b为参考电压矢量靠近V3的特殊情况,此时FD-MPC在第k个控制周期选择的um依然是V2,un为V3;而D-MPCC选择的um却变成了V3,此时逆变器有两相的开关发生了跳变,导致了较高的开关频率。
同时D-MPCC中计算最优电压矢量持续时间有时会导致持续时间小于零,此时就需要舍弃这一组电压矢量,重新寻找其他电压矢量,同样会造成开关频率过高。所以必须寻找使持续时间恒大于零的方法,使得FD-MPC在降低计算量和固定开关频率的基础上,保持良好的稳定性。
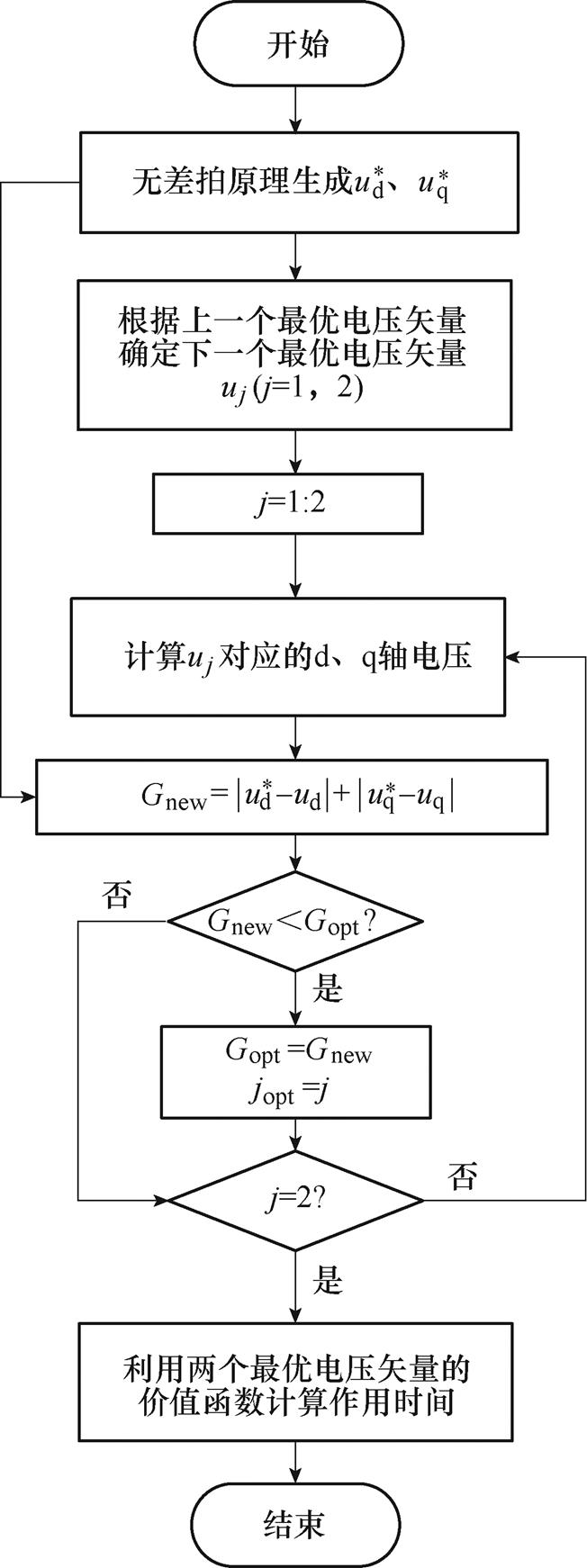
图3 FD-MPC流程
Fig.3 FD-MPC flow chart
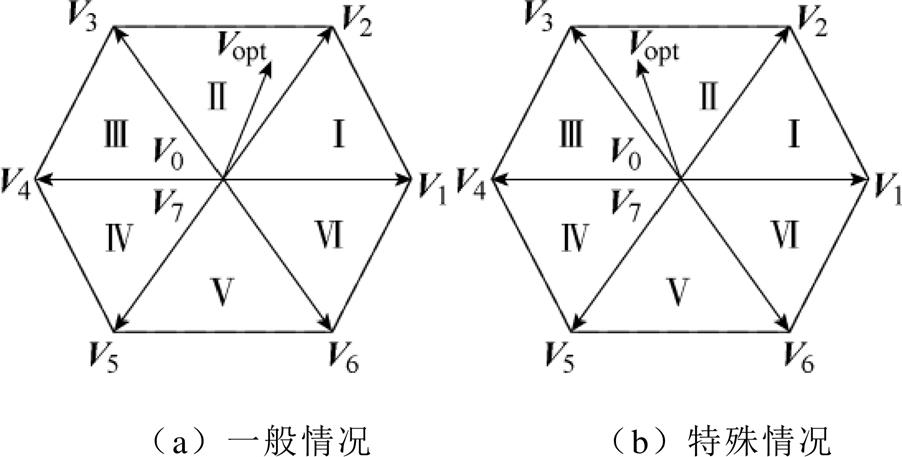
图4 电压矢量的选择范围
Fig.4 Selection range of voltage vector
在电压矢量的选取中,单个控制周期选择两次电压矢量,第一次是第k-1个控制周期的un转换为第k个控制周期的um,第二次是第k个控制周期的um转换为第k个控制周期的un,依次循环。在计算电压矢量的持续时间时,要求持续时间必须恒为正值,从而固定开关频率,此时的电压矢量作用效果如图5所示。
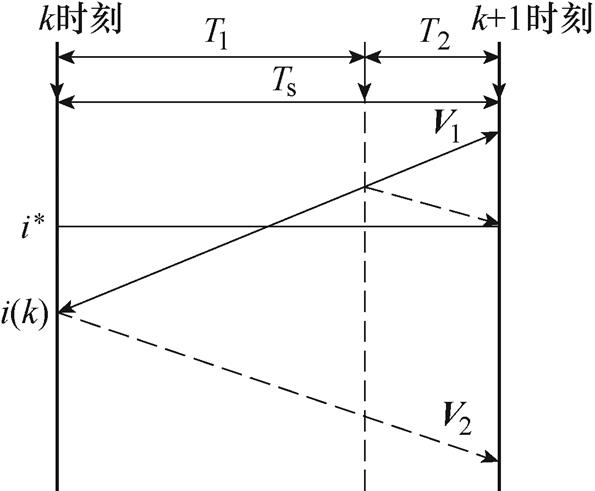
图5 电压矢量作用示意图
Fig.5 Schematic diagram of voltage vector function
假设每个电压向量的持续时间为整个控制周期,产生的d、q轴电压误差为
 (13)
(13)
式中,um|n为电压向量um和un。
理想状态下,希望um和un作用在控制系统后,d轴和q轴的电压误差为零,但实际应用中,电压误差不可能为零,会有一定的误差。综合考虑d轴和q轴的电压误差,可建立计算持续时间的方程为
 (14)
(14)
式中,T1和T2分别为um和un的持续时间; 为一个变量,表示一个控制周期后的d、q轴的电压误差。
为一个变量,表示一个控制周期后的d、q轴的电压误差。
解方程式(14)可得
 (15)
(15)
式中, 。
。
此时T1和T2的值的大小与变量d 有关,所以为了保证T1和T2的数值同时大于零,必须对d 的大小进行分析,由于中间变量D的表达式中不包含变量d,所以可从中间变量D的表达式入手,分两种情况讨论。
第一种是D>0的情况,此时满足
 (16)
(16)
此时如果保证T1和T2都大于零,则d 的取值范围为
 (17)
(17)
第二种是D<0的情况,此时满足
 (18)
(18)
此时如果保证T1和T2都大于零,则d 的取值范围为
 (19)
(19)
综上,d 的取值范围为
 (20)
(20)
式中,Gmin和Gmax分别为两个最优电压矢量对应的电压差型价值函数的较小值和较大值。
选择合适的d 之后,电压矢量的持续时间就恒大于零,此时开关频率变为固定值。
根据上述两种控制策略的控制原理,从三个方面分析其差异性:单个控制周期矢量个数、开关频率和计算量,见表2。
表2 两种控制策略的对比
Tab.2 Comparison of two control schemes
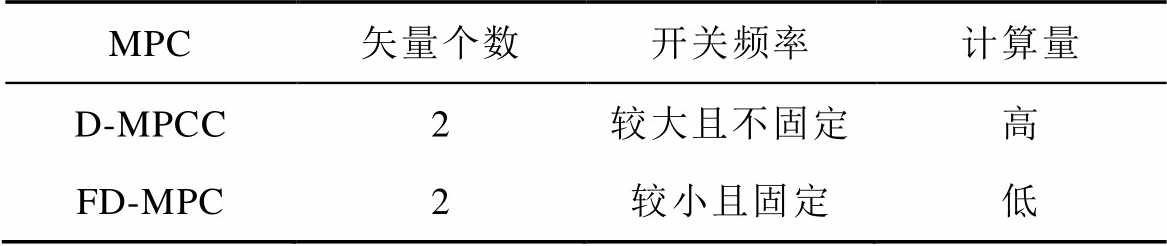
MPC矢量个数开关频率计算量 D-MPCC2较大且不固定高 FD-MPC2较小且固定低
由表2可知,两种控制策略最明显的差异体现在开关频率和计算量。传统D-MPCC策略由于没有限制电压矢量的选择范围,导致开关频率较高和计算量大;FD-MPC策略限定了电压矢量的选择范围,降低了计算量和开关频率。在控制的稳定性方面,由于D-MPCC的参考电压矢量所在的扇区会随着控制周期的变化而发生规律性变化,而本文提出的FD-MPC策略在选择电压矢量时遵从了这种规律性变化,所以FD-MPC策略在减小计算量和固定开关频率基础上,能够保持与D-MPCC媲美的稳定性。
为了验证所提出的FD-MPC策略的有效性,在Matlab/Simulink环境下分别对D-MPCC和FD-MPC策略进行仿真对比。FD-MPC的系统控制框图如图6所示,SPMSM的参数见表3,D-MPCC的采样频率为20 kHz,FD-MPC的采样频率为10 kHz。经过多次验证,变量d 取值为
 (21)
(21)
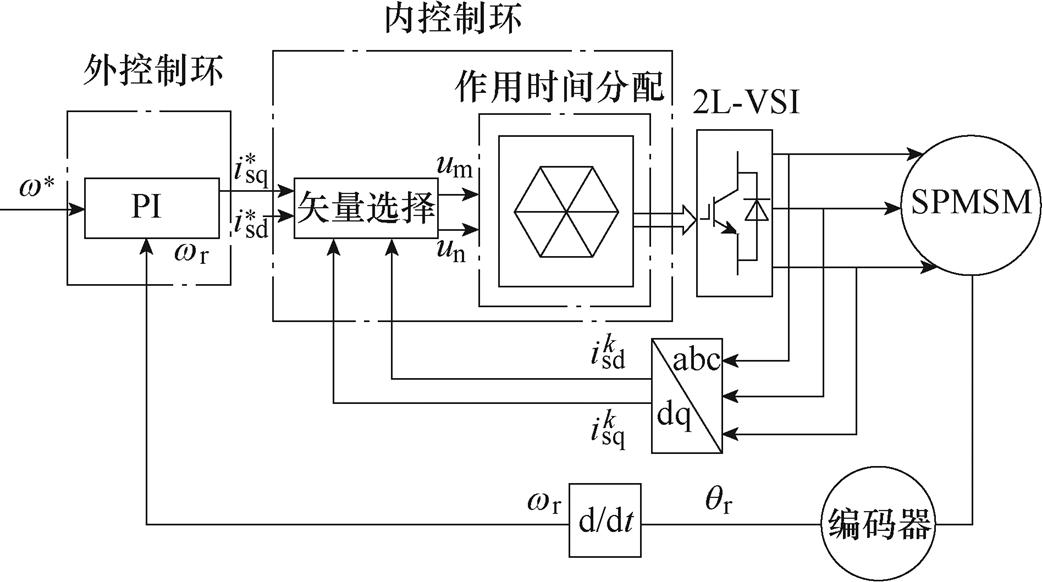
图6 系统控制框图
Fig.6 System control block diagram
表3 SPMSM参数
Tab.3 Electric machine parameter

参 数数 值 定子电阻Rs/W0.958 5 定子电感Ls/mH5.25 永磁体磁链yf/Wb0.142 7 转动惯量Jm/(kg·m2)0.632 9×10-3 额定电压Udc/V220 极对数p4 电机额定转速n/(r/min)1 500 电机额定转矩Te/(N·m)5
式中,Gm和Gn分别为最优电压矢量um、un对应的电压差型价值函数。
首先比较两种策略在稳定运行的稳态性能,两种策略的稳定性能如图7所示。波形从上到下依次为电机转速、电磁转矩和a相定子电流。图7代表的工况为:电机给定转速为300 r/min、负载转矩为3 N·m。从图7中可以看出,在电机转速方面,两种方案的转速波动都较小;在电磁转矩方面,FD-MPC策略纹波更少,平滑性更好;在电流质量方面,两种控制策略的表现几乎一致,定子电流谐波率如图8所示,其中D-MPCC策略a相电流的谐波率为4.64 %,FD-MPC策略a相电流的谐波率为4.21 %。以上分析结果表明,本文提出的FD-MPC策略在减小计算量和固定开关频率的同时,保持了良好的稳态性能。
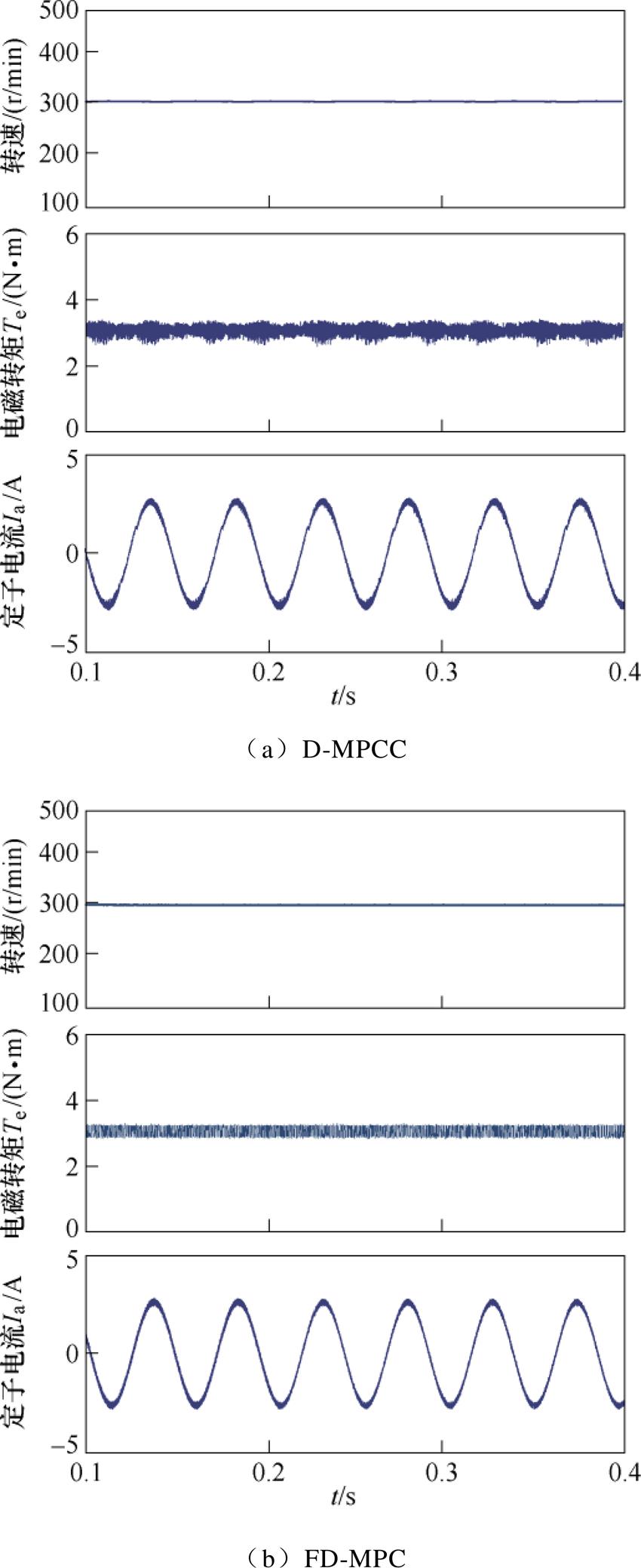
图7 电机稳定性能
Fig.7 Comparison of stability performance

图8 定子电流谐波率
Fig.8 Harmonic rate of stator current
图9为两种控制策略的动态性能仿真对比。代表的工况为:电机空载起动,在0.2 s加入3 N·m负载,在0.4 s时去掉负载,变为空载运行。从图9中可以看出,在电机转速方面,两种策略在加入负载后对转速的调节都有很好的效果;在电磁转矩方面,两种策略的电磁转矩均能快速跟踪负载的变化,但FD-MPC策略的电磁转矩纹波明显比D-MPCC策略少;在a相电流方面,两种策略均能在保持良好的正弦度的同时快速跟踪转矩的变化。
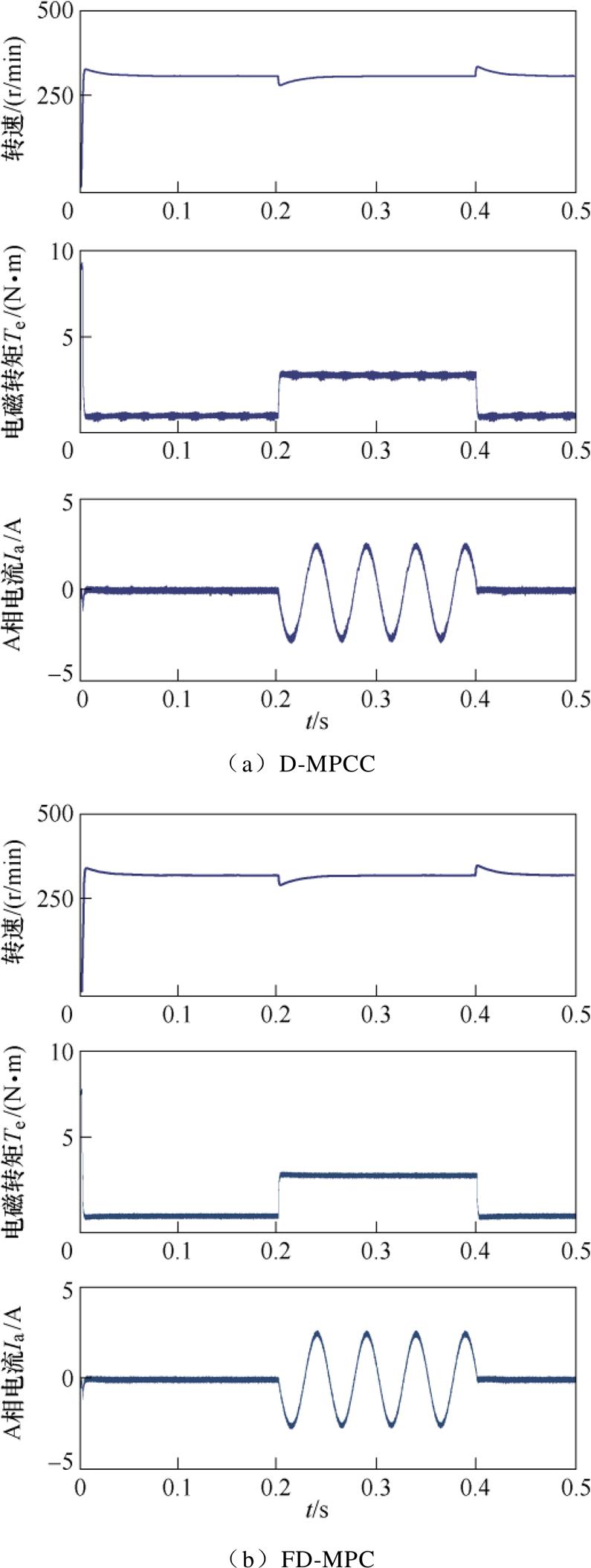
图9 动态性能
Fig.9 Dynamic property
本文提出的FD-MPC策略在不影响电流稳态性能的前提下能有效减小开关频率和计算量。图10所示为两种控制策略每隔0.05 s计算一次所有上桥臂开关管的开关次数,两种策略的采样频率与仿真保持一致,从图中可以看出,传统的D-MPCC策略的开关频率并不固定,原因是没有对开关状态的集合进行约束,导致电压矢量对应的开关状态的选择具有随机性。可以算出D-MPCC策略的系统变换器在0.05 s内平均开关次数为1 403,所以传统的D- MPCC策略的平均开关频率为9.35 kHz。本文提出的FD-MPC策略限定了开关状态的选择范围,只允许一相的开关状态发生连续性跳变,单个控制周期内上桥臂所有开关管的开关次数固定为两次,所以可以算出FD-MPC策略的系统变换器在0.05 s内开关次数恒为1 000,所以FD-MPC策略的平均开关频率为6.7 kHz,可见采用FD-MPC策略时,变换器的开关频率将大幅度降低。
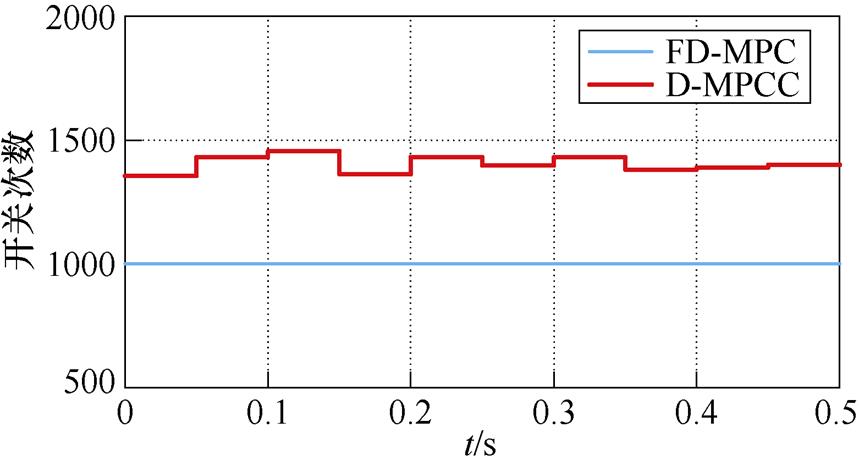
图10 开关次数
Fig.10 Switching times
仿真研究从静态特性和动态特性出发,对比分析了电流、磁链、开关次数和电机转速等方面的性能,证明了本文提出的FD-MPC策略在降低计算量和固定开关频率的同时,能够获得与传统的D- MPCC相媲美的动静态性能。
在仿真研究基础上,搭建了两电平逆变器供电的永磁同步电机实验平台,以验证理论分析的正确性。针对D-MPCC和FD-MPC两种控制策略进行实验对比研究。实验装置的构成如图11所示,主要包括dSPACE1104控制器、IGBT驱动电路、两电平逆变器、永磁同步电机、磁粉制动器等。实验中D-MPCC的采样频率为20 kHz,FD-MPC的采样频率为10 kHz。
图12为电机在带载稳定运行过程中的稳态波形对比,从图中可以看出,FD-MPC策略的转速波动明显更小;为了更直观地比较分析,本文采用标准差来衡量这两种控制策略下的转矩脉动,转矩脉动Te-rip的计算公式为
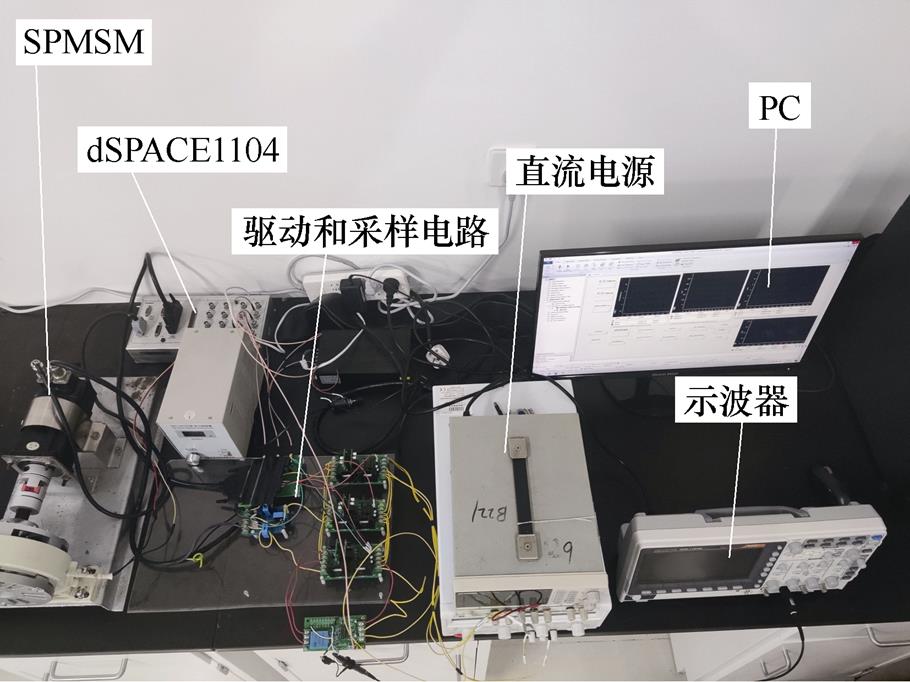
图11 实验装置构成
Fig.11 Experimental setup
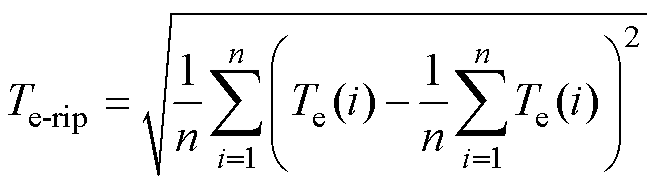 (22)
(22)
式中, 为采样点的个数。
为采样点的个数。
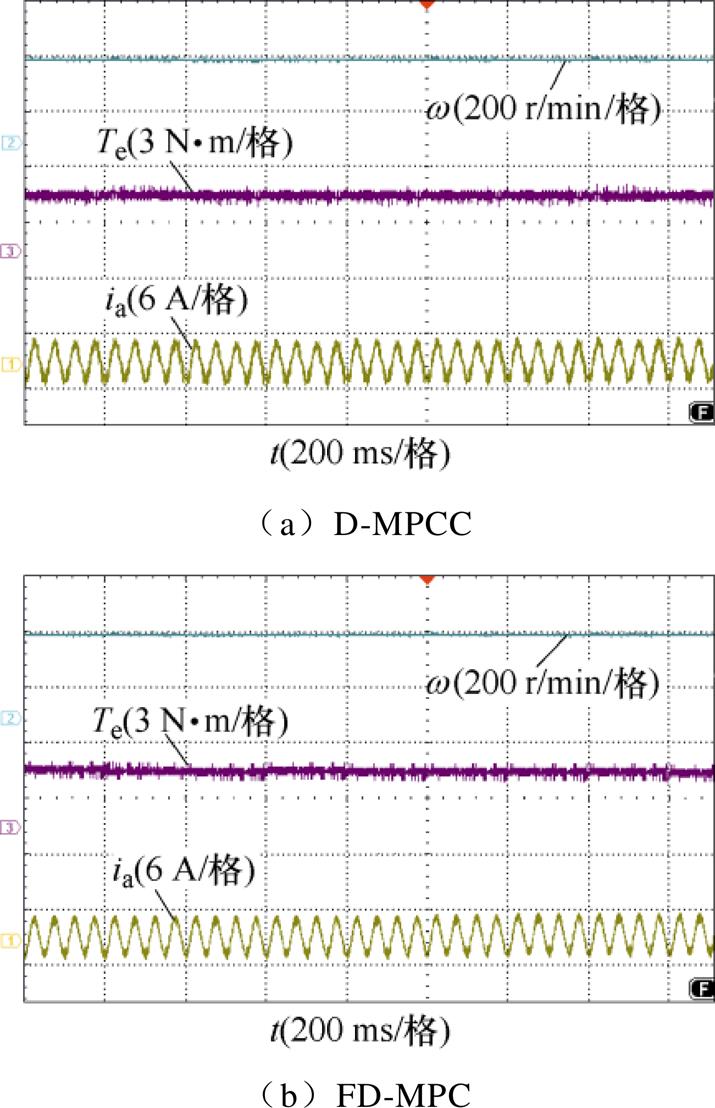
图12 稳态性能
Fig.12 Steady state performance
根据转矩标准差计算公式可以计算出两种控制策略带3 N·m负载时稳定运行于300 r/min时的转矩脉动大小,其中D-MPCC的转矩脉动为0.364 N·m,FD-MPC的转矩脉动为0.295 N·m,与D-MPCC相比,本文所提出的FD-MPC控制使得转矩脉动减小了18.9 %;在电流谐波方面,两种控制策略的效果几乎一致。上述分析结果表明,相比于D-MPCC策略,FD-MPC策略具有更好的稳态性能。
图13为电机空载起动时的动态实验波形对比,速度给定为300 r/min,从图13中可以看出两种策略均能平稳地起动,转速基本没有超调,同时转速的响应时间相近,但FD-MPC策略的转矩波动更小,同时FD-MPC策略的定子电流更具正弦性且毛刺少。

图13 空载起动性能
Fig.13 No-load starting performance
图14和图15分别给出了两种控制策略的负载转矩由0突增至3 N·m时和由3 N·m突减至0的动态响应曲线。从图中可以看出,两种控制策略的电磁转矩和定子电流都能快速跟随负载转矩的变化,但FD-MPC策略的转速波动更小。

图14 突加负载性能
Fig.14 Sudden load performance
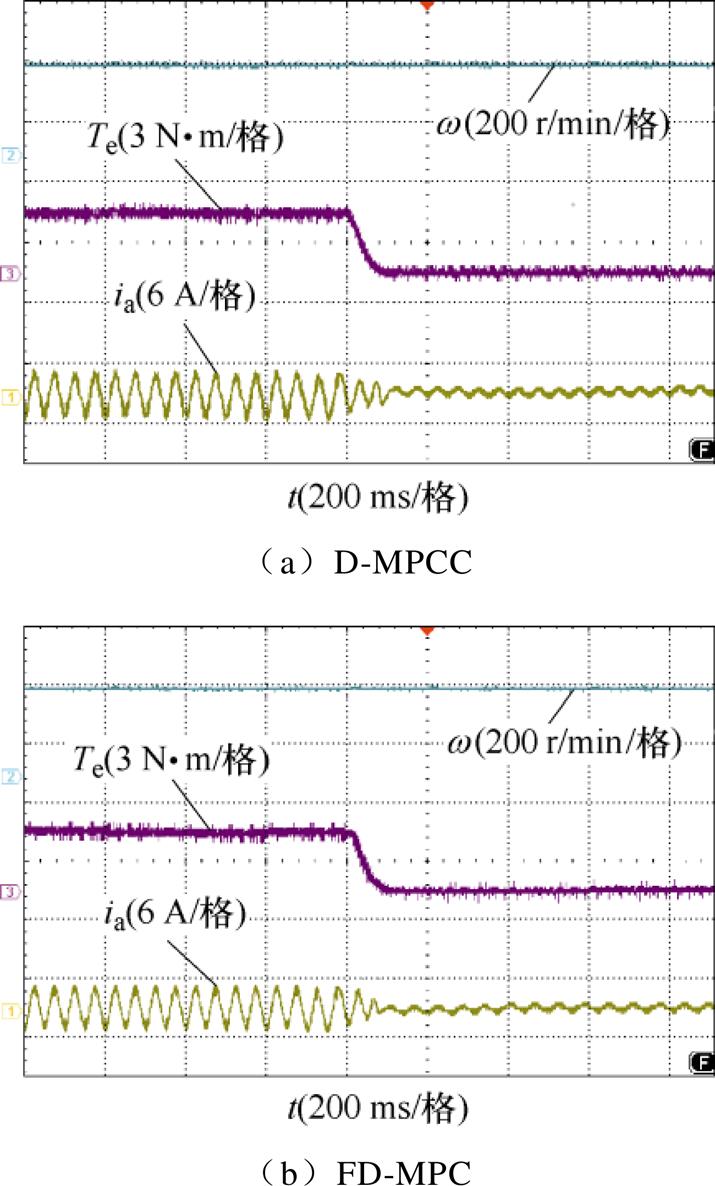
图15 突减负载性能
Fig.15 Load reduction performance
对于两种策略的计算负担,可以在dSPACE1104控制系统中直接读取周转时间进行比较。计算时间包括通信时间、A-D转换时间、数据保存时间和代码实现时间。一般情况下,对于不同的控制策略,只要实验条件相同,通信时间、A-D转换时间和数据保存时间就相同。因此,比较计算时间就是比较代码实现的时间。不同控制策略的计算量如图16所示。通过图16可知,D-MPCC策略的计算时间为27.2 ms,而本文提出的FD-MPC策略的计算时间为16.8 ms。这表明本文提出的FD-MPC策略能够显著减少算法计算时间,有利于提高控制系统的实用性。
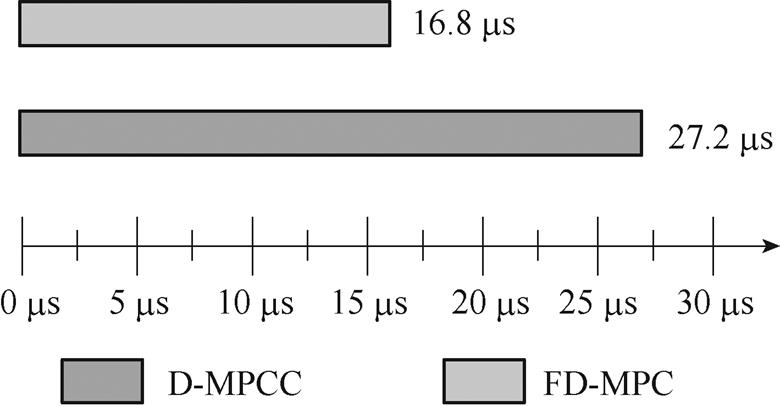
图16 不同控制策略的计算量
Fig.16 Computation burden of different control strategies
本文针对传统的永磁同步电机双矢量模型预测电流控制计算量大、开关频率不固定的问题,提出了一种固定开关频率的双矢量模型预测控制策略(FD-MPC),该策略构建了一个高效的电压矢量选择表,在每次选择电压矢量对应的开关状态时,只允许一相的开关状态发生连续性跳变,缩小选择的范围,减小了控制器的计算量;同时在计算电压矢量持续时间时,考虑系统误差带来的影响,提出了一种基于d、q轴电压差作用时间的计算方法,进而固定开关频率;仿真和实验结果都证明了文中所提控制策略在固定开关频率和减小计算量的同时保持了优异的动静态性能,提升了永磁同步电机功率驱动变换器的稳定性和可靠性。
参考文献
[1] 於锋, 朱晨光, 吴晓新, 等. 基于矢量分区的永磁同步电机三电平双矢量模型预测磁链控制[J]. 电工技术学报, 2020, 35(10): 2130-2140.
Yu Feng, Zhu Chenguang, Wu Xiaoxin, et al. Two- vector-based model predictive flux control of three- level based permanent magnet synchronous motor with sector subregion[J]. Transactions of China Electrotechnical Society, 2020, 35(10): 2130-2140.
[2] 王晓琳, 刘思豪, 顾聪. 基于自适应基准锁相环的高速永磁电机转子位置误差全补偿方法[J]. 电工技术学报, 2021, 36(20): 4308-4317.
Wang Xiaolin, Liu Sihao, Gu Cong. A rotor position error compensation algorithm for high-speed per- manent magnet motor based on phase-locked loop with adaptive reference[J]. Transactions of China Electrotechnical Society, 2021, 36(20): 4308-4317.
[3] Shriwastava R G, Bhise D R, Nagrale P. Comparative analysis of FOC based three level DCMLI driven PMSM drive[C]//2019 International Conference on Innovative Trends and Advances in Engineering and Technology (ICITAET), Shegoaon, India, 2020: 26- 31.
[4] 王学庆, 王政, 程明. T型三电平逆变器馈电双三相PMSM直接转矩控制[J]. 电工技术学报, 2017, 32(增刊1): 116-123.
Wang Xueqing, Wang Zheng, Cheng Ming. Direct torque control of T-type three-level inverter fed dual three-phase PMSM drives[J]. Transactions of China Electrotechnical Society, 2017, 32(S1): 116-123.
[5] Rehman A U, Basit B A, Choi H H, et al. Com- putationally efficient deadbeat direct torque control considering speed dynamics for a surface-mounted PMSM drive[J]. IEEE/ASME Transactions on Mechatro- nics, 2022, 27(5): 3407-3418.
[6] 张珍睿, 刘彦呈, 陈九霖, 等. 永磁同步电机幅值控制集模型预测控制策略[J]. 电工技术学报, 2022, 37(23): 6126-6134.
Zhang Zhenrui, Liu Yancheng, Chen Jiulin, et al. Amplitude control set model predictive control strategy for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2022, 37(23): 6126-6134.
[7] 姚绪梁, 黄乘齐, 王景芳, 等. 具有参数辨识功能的永磁同步电机双矢量模型预测电流控制[J/OL]. 中国电机工程学报: 1-13[2022-12-10].
Yao Xuliang, Huang Chengqi, Wang Jingfang, et al. A two-vector-based model predictive current control with online parameter identification for PMSM drives[J/OL]. Proceedings of the CSEE, 1-13[2022- 12-10].
[8] 冯智煜, 高琳, 殷凯轩, 等. 开绕组永磁同步电机零矢量注入模型预测控制[J]. 电机与控制学报, 2022, 26(2): 32-42.
Feng Zhiyu, Gao Lin, Yin Kaixuan, et al. Improved model predictive zero vector injection control for open-winding permanent magnet synchronous motors[J]. Electric Machines and Control, 2022, 26(2): 32-42.
[9] 徐艳平, 张保程, 周钦. 永磁同步电机双矢量模型预测电流控制[J]. 电工技术学报, 2017, 32(20): 222-230.
Xu Yanping, Zhang Baocheng, Zhou Qin. Two-vector based model predictive current control for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2017, 32(20): 222-230.
[10] 窦智峰, 晋玉祥, 金楠, 等. 高效电压源逆变器双矢量模型预测电流控制[J]. 电机与控制学报, 2020, 24(6): 153-162.
Dou Zhifeng, Jin Yuxiang, Jin Nan, et al. Two- vector-based mode predictive current control for voltage source inverter with high efficiency[J]. Elec- tric Machines and Control, 2020, 24(6): 153-162.
[11] 张晓光, 闫康, 张文涵. 开绕组永磁同步电机混合双矢量模型预测控制[J]. 电工技术学报, 2021, 36(1): 96-106.
Zhang Xiaoguang, Yan Kang, Zhang Wenhan. Hybrid double vector model predictive control for open- winding permanent magnet synchronous motor with common DC bus[J]. Transactions of China Electro- technical Society, 2021, 36(1): 96-106.
[12] 高逍男, 陈希有. 一种改进的永磁同步电机模型预测控制[J]. 电力自动化设备, 2017, 37(4): 197-202, 217.
Gao Xiaonan, Chen Xiyou. Improved model predi- ctive control of permanent magnet synchronous motor[J]. Electric Power Automation Equipment, 2017, 37(4): 197-202, 217.
[13] 姚骏, 刘瑞阔, 尹潇. 永磁同步电机三矢量低开关频率模型预测控制研究[J]. 电工技术学报, 2018, 33(13): 2935-2945.
Yao Jun, Liu Ruikuo, Yin Xiao. Research on 3-vector model predictive control with low switching fre- quency of permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2018, 33(13): 2935-2945.
[14] 朱晨光, 於锋, 罗潇, 等. 计及开关频率分区优化的PMSM三电平模型预测控制[J]. 电源学报, 2022, 20(3): 133-143.
Zhu Chenguang, Yu Feng, Luo Xiao, et al. Three- level model predictive control of PMSM based on subregion switching frequency optimization[J]. Journal of Power Supply, 2022, 20(3): 133-143.
[15] Zhang Xiaoguang, Zhao Zhihao. Model predictive control for PMSM drives with variable dead-zone time[J]. IEEE Transactions on Power Electronics, 2021, 36(9): 10514-10525.
[16] 李昱, 郭宏, 平朝春, 等. 基于电流源变流器的永磁同步电机驱动系统全状态变量预测转矩控制[J]. 电工技术学报, 2021, 36(1): 15-26.
Li Yu, Guo Hong, Ping Zhaochun, et al. A full-state variable predictive torque control of current source converter fed permanent magnet synchronous motor drives[J]. Transactions of China Electrotechnical Society, 2021, 36(1): 15-26.
[17] 郑长明, 阳佳峰, 高昂, 等. 永磁同步电机长线变频驱动系统定频滑模预测电流控制[J/OL]. 电工技术学报: 1-11[2022-11-25].
Zheng Changming, Yang Jiafeng, Gao Ang, et al. Fixed switching frequency sliding-mode predictive current control of a PMSM variable-frequency drive system with long cables[J/OL]. Transactions of China Electrotechnical Society, 1-11[2022-11-25].
[18] Xu Shuai, Sun Zhenyao, Yao Chunxing, et al. Model predictive control with constant switching frequency for three-level T-type inverter-fed PMSM drives[J]. IEEE Transactions on Industrial Electronics, 2022, 69(9): 8839-8850.
[19] Liu Xiaodong, Zhang Zhenbin, Yang Xinliang, et al. Fixed switching frequency predictive control for PMSM drives with guaranteed control dynamics[C]// 2020 IEEE 9th International Power Electronics and Motion Control Conference (IPEMC2020-ECCE Asia), Nanjing, China, 2021: 3033-3038.
[20] Mishra I, Tripathi R N, Kumar Singh V, et al. Discrete adaptive HCC based FS-MPC with constant switching frequency for PMSM drives[C]//2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 2019: 1-6.
Abstract In order to achieve high-performance speed control of permanent magnet synchronous motor (PMSM), the model predictive control strategy is usually adopted. The single-vector model predictive control only outputs one voltage vector in each control cycle, which leads to a high steady-state ripple. The dual-vector model predictive control is widely used in PMSM control. However, the switching frequency of the inverter using dual-vector model predictive control is high and unfixed, and needs a large amount of calculation, increasing the hardware requirements and costs. Therefore, this paper proposes a dual-vector model predictive control with fixed switching frequency for PMSM, which fixes the switching frequency, reduces the calculation amount, and is more beneficial to practical application.
The sector where the reference voltage vector is located in each control period always changes in a fixed mode, circulating from sector I to sector VI and only changing to the adjacent sectors or remaining the same in the next control cycle. Accordingly, an efficient voltage vector selection table is designed. Thus, the voltage vector will be only selected from the adjacent voltage vectors. In addition, to further reduce the calculation burden, the value function based on voltage difference is used to screen the voltage vector. The calculation scheme of voltage vector action time is given based on the voltage difference value function using the reservation error. The negative action time and the sum of action time exceeding the control cycle are avoided, and the stability of the control system is improved.
An experimental prototype based on dSPACE1104 is built to compare and study the control strategies mentioned in this paper. The experimental results show that in terms of static performance, compared with the traditional D-MPCC, the proposed FD-MPC has less torque ripple, better smoothness, and a lower harmonic rate of A-phase current, indicating that the FD-MPC can maintain good steady-state performance while reducing calculation amount and fixing switching frequency. Regarding dynamic performance, both strategies have good effects on adjusting speed after adding load. The A-phase current of both strategies can quickly track the torque change while maintaining a good sine degree. Regarding calculation amount, the calculation time of FD-MPC is significantly smaller than that of D-MPCC, which is beneficial to improve the practicability of the control system.
The following conclusions can be drawn from the experimental and simulation results: (1) Compared with the traditional D-MPCC, the proposed FD-MPC can effectively reduce the amount of calculation, simplify the control structure and enhance the robustness using the efficient voltage vector selection table and the value function based on voltage difference to filter the voltage vector. (2) The voltage vector action time calculation method based on the voltage difference value function is further proposed. The reservation error is used to avoid the negative action time, and the sum of action time is greater than the control period. The proposed FD-MPC has better steady-state and dynamic performance than the traditional D-MPCC.
keywords:Permanent magnet synchronous motor, model predictive control, dual-vector, fixed switching frequency
国家自然科学基金资助项目(51777216)。
收稿日期 2022-09-30
改稿日期 2022-11-14
DOI: 10.19595/j.cnki.1000-6753.tces.221857
中图分类号:TM351
陈 荣 男,1978年生,博士,讲师,研究方向为电机智能控制和特种电机驱动。E-mail: chenrongjn@163.com(通信作者)
翟凯淼 男,1998年生,硕士研究生,研究方向为电机系统及其控制。E-mail: zhaikaimiao@163.com
(编辑 郭丽军)