
图1 双三相永磁同步电机驱动系统拓扑结构
Fig.1 Topological structure of dual three-phase permanent magnet synchronous motor drive system
摘要 针对双三相永磁同步电机模型预测控制中存在共模电压较大、xy平面上谐波电流较大和控制器计算负担严重的问题,该文提出一种低共模电压的模型预测电流控制方法。首先,将虚拟电压矢量作为输入控制集,通过具有小共模电压的虚拟电压矢量对xy平面进行控制。然后,在每个采样周期中,通过计算参考电压矢量位置来减少候选电压矢量的数量。再通过无权重系数的价值函数对候选电压矢量进行评估,选择出最优电压矢量。所提方法有效地减少了xy平面上的谐波电流,消除了价值函数中的权重系数;减少了控制器的计算负担和双三相永磁同步电机驱动系统中固有的共模电压。最后,通过与两种现存的传统模型预测控制方法进行对比实验,证明了所提方法的有效性。
关键词:模型预测电流控制 双三相永磁同步电机 共模电压 虚拟电压矢量 权重系数
与三相电机相比,双三相永磁同步电机具有更好的容错能力、更高的转矩密度、更低的单相电流和更高的效率[1-2]。这些优点使得双三相永磁同步电机广泛应用于大功率、高可靠性的应用领域,如电动滑翔伞、电动汽车、电动飞机等[3-4]。由于一些完全成熟的三相技术可以直接拓展应用,因此双三相永磁同步电机比四相、五相和七相电机更具有优势[5-8]。
近15年来,模型预测控制因具有动态响应快、结构简单、添加约束容易等优点,逐渐成为研究热点。根据控制目标的不同,可分为模型预测电流控制和模型预测转矩控制[9-10]。模型预测电流控制以电流为控制目标,适用于电力电子领域,已广泛应用于三相驱动系统中[11-12],预测计算所有电压矢量并通过价值函数选取最优电压矢量。但对于多相系统而言,电压矢量呈指数倍增长,如果对满足期望条件的电压矢量进行遍历的预测计算,将严重增加控制器的计算负担。此外,多相驱动系统具有谐波平面。为了改善电流质量,需要引入谐波项的权重系数[13-14]。因为没有关于权重系数调整的理论基础,这使得方法复杂化,同时带来了额外的计算负担。因此,模型预测电流控制应用于多相驱动系统时,谐波电流和计算负担是需要考虑的两个问题。在文献[15-17]中,为了改善双三相电机和五相电机的这两个问题,引入了虚拟电压矢量和占空比调制技术。这其中,Zhao Wenxiang等提出了一种五相电机的级联模型预测电流控制方法,候选电压矢量降至6[15]。Luo Yixiao等研究了双三相永磁同步电机在模型预测控制中的计算负担,提出的方法将候选电压降低到2[16]。在文献[15-16]中,都合理简化了满足期望的电压矢量,而且电流谐波和转矩脉动都有了明显的改善,保证了电机的性能。但是,上述文献并未考虑共模电压带来的问题。
在驱动系统中,考虑减少共模电压是必要的。因为逆变器的离散工作模式会带来电磁干扰、机械振动等不良问题,这会导致附近的电气设备无法正常运行。共模电压产生的共模电流会损害电机绝缘,产生的轴电流会腐蚀电机轴承,这都会影响电机的使用寿命[18-21]。现有文献中减少共模电压的方法主要有两种:方法一是引入无源或有源滤波器,这需要设计期望的外部电路[22-23];方法二是修改逆变器的PWM模式[24-25]。和方法一相比较,方法二设计简单,且不需要额外的硬件电路,成本较低,因此,近些年越来越受到人们的关注。而关于利用模型预测电流控制技术来减少共模电压主要有两种思路:思路一是消除控制集中产生大共模电压的零矢 量[26-27]。例如,Yu Bin等利用两个相位相反的大电压矢量合成虚拟零电压矢量,有效地减少了共模电压[26]。此外,文献[27]对双三相电机的复杂拓扑结构进行了研究,控制集中的电压矢量都具有零共模电压的特性,从而实现了驱动系统中共模电压的降低。思路二是对价值函数进行修改[28-29]。例如,文献[28]设置了共模电压项的权重系数,这就需要在减小共模电压和稳态性能之间做出选择。不同的权重系数会导致共模电压幅值和电流谐波畸变率的变化。此外,该方法对五相电机的31个电压矢量进行了预测计算,因此控制器的计算负担很重。
为了解决上述的问题,本文提出了一种基于虚拟电压矢量的低共模电压模型预测电流控制方法(Model Prediction Current Control method based on Virtual Voltage Vector with Reduced Common-Mode Voltage, MPCC-VVV-RCMV)。首先,通过36个低共模电压的电压矢量来合成48个虚拟电压矢量,这些虚拟电压矢量用于减少共模电压和谐波电流。其次,在48个虚拟电压矢量中,根据参考电压矢量的位置来选择4个候选电压矢量。然后,通过新的价值函数对候选电压矢量进行评估,以确定最优电压矢量。这就使得价值函数评估计算减少到4次,控制器的计算负担显著减少。最后,通过实验证明了所提出方法的有效性。
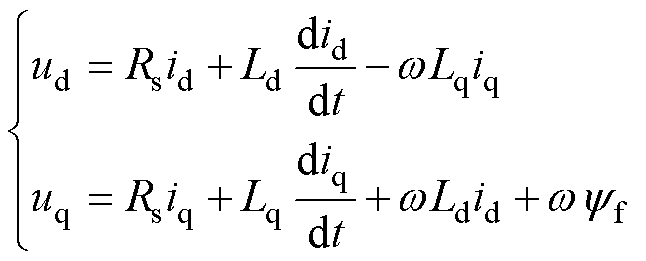
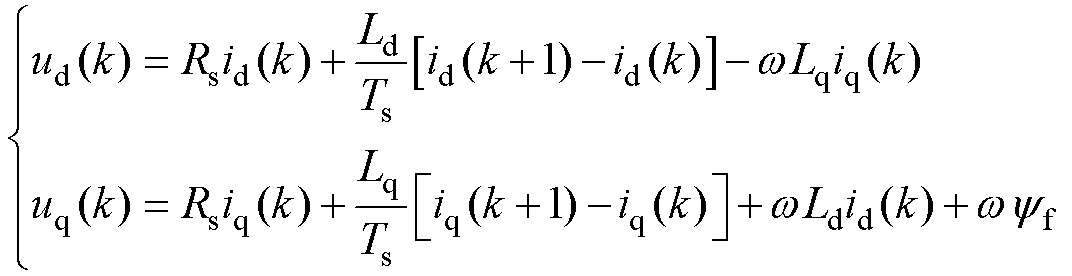
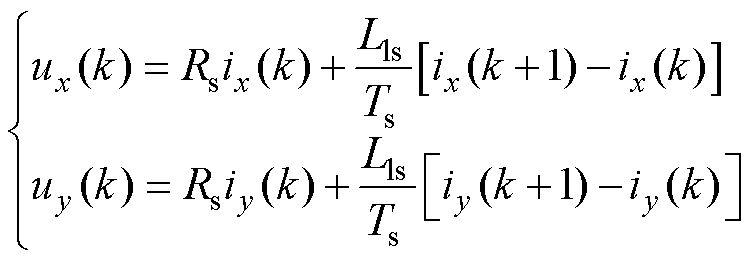
双三相永磁同步电机的定子绕组采用星形联接,两套绕组在空间上间隔30 °,中性点相互隔离。电机由一套六相两电平逆变器供电。双三相永磁同步电机驱动系统拓扑结构如图1所示。根据空间矢量解耦原理可得,电机的变量可以映射到ab、xy和o1o2 3个互相正交的平面上,特别说明的是,ab 平面只参与电机的能量转换,而xy和o1o2平面只产生谐波损耗。由于本文研究的电机中性点是相互隔离的,所以不考虑o1o2平面。进一步地,通过Park变换可以得到双三相永磁同步电机在dq和xy轴下的数学模型为
图1 双三相永磁同步电机驱动系统拓扑结构
Fig.1 Topological structure of dual three-phase permanent magnet synchronous motor drive system
 (1)
(1)
 (2)
(2)
 (3)
(3)
式中,ud、uq分别为d、q轴上的电压;id和iq分别为d、q轴上的电流;ux和uy分别为x、y轴上的电压;ix和iy分别为x、y轴上的电流;Rs为定子电阻;w 为电角速度;Ld和Lq分别为d、q轴上的电感;Lls为定子漏感;yf为永磁体磁链;Te为电磁转矩;np为极对数。
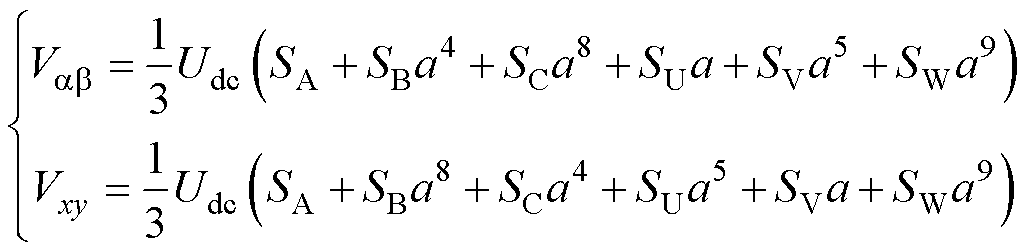
将电压源逆变器的64种开关状态通过式(4)表示为双三相永磁同步电机在ab 平面上和xy平面上的电压矢量。
 (4)
(4)
式中, ;Si为逆变器的开关函数,Si=1为开关器件的上桥臂处于导通状态、下桥臂处于关断状态,Si=0为上桥臂处于关断状态、下桥臂处于导通状态,i为逆变器的A、B、C、U、V、W相;Udc为逆变器直流母线电压;Vab 和Vxy分别为ab 平面上和xy平面上的电压幅值。其中64个电压矢量包括60个基本电压矢量和4个零矢量(V07、V70、V00、V77)。将60个基本电压矢量按幅值可分为G1、G2、G3、G4四组,如图2所示。G1、G2、G3和G4组的电压矢量分别包含着大电压矢量、中大电压矢量、中小电压矢量和小电压矢量。四组电压矢量的幅值分别为
;Si为逆变器的开关函数,Si=1为开关器件的上桥臂处于导通状态、下桥臂处于关断状态,Si=0为上桥臂处于关断状态、下桥臂处于导通状态,i为逆变器的A、B、C、U、V、W相;Udc为逆变器直流母线电压;Vab 和Vxy分别为ab 平面上和xy平面上的电压幅值。其中64个电压矢量包括60个基本电压矢量和4个零矢量(V07、V70、V00、V77)。将60个基本电压矢量按幅值可分为G1、G2、G3、G4四组,如图2所示。G1、G2、G3和G4组的电压矢量分别包含着大电压矢量、中大电压矢量、中小电压矢量和小电压矢量。四组电压矢量的幅值分别为
 (5)
(5)
对于双三相永磁同步电机的两电平驱动系统所产生的共模电压,仅能够做到减少而不能完全消除。表1给出了64个电压矢量产生的共模电压。
在这里定义两个概念:
(1)由于本文讨论的对象是中性点相互隔离的双三相永磁同步电机,因此共模电压被定义为两个星形节点与直流母线侧中点之间的电压。定义ABC三相中性点与直流母线中点之间的电压为UconN,UVW三相中性点与直流母线中点之间的电压为UconM。共模电压的计算为
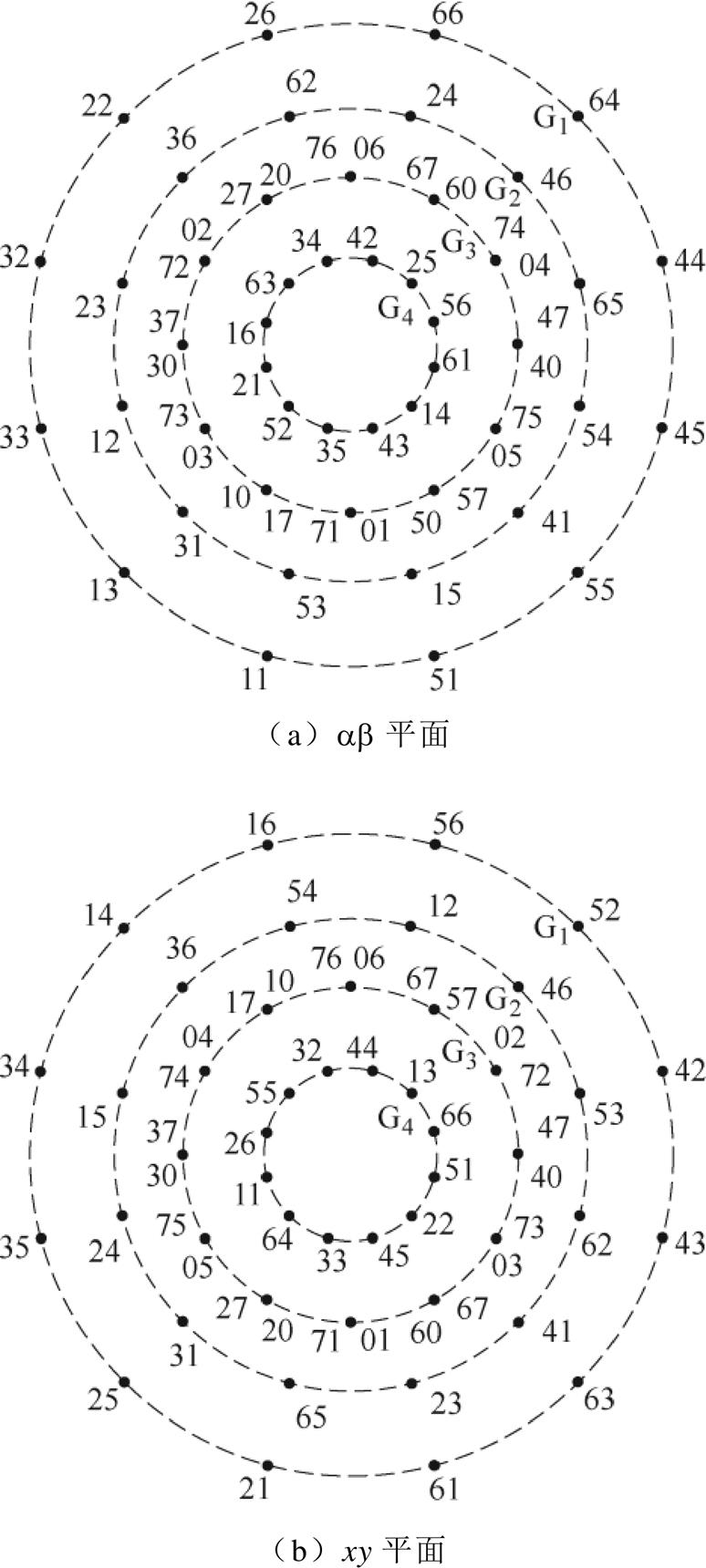
图2 基本电压矢量
Fig.2 Basic voltage vectors
表1 电压矢量产生的共模电压
Tab.1 Common-mode voltage generated by voltage vector

编号电压矢量UconNUconM (1)V44、V12、V22、V41、V24、V11、V14、V21、V42 (2)V32、V51、V64、V54、V31、V62、V61、V52、V34 (3)V13、V26、V45、V46、V23、V15、V25、V16、V43 (4)V55、V66、V33、V65、V36、V53、V56、V63、V35 (5)V40V20V10 (6)V04V02V01 (7)V60V30V50 (8)V06V03V05 (9)V47V27V17 (10)V74V72V71 (11)V67V37V57 (12)V76V73V75 (13)V07 (14)V70 (15)V77 (16)V00
 (6)
(6)
式中,UAO、UBO、UCO、UUO、UVO、UWO为逆变器桥臂输出中点与直流侧电压中点之间的电压差值。
(2)UconN和UconM的绝对值均等于Udc/2,定义为大共模电压。如果其中一个绝对值等于Udc/2,另一个绝对值等于Udc/6,则定义为中大共模电压。两者的绝对值都等于Udc/6,定义为小共模电压。
传统模型预测控制方法(the Traditional Model Predictive Current Control method, MPCC-T)采用向前欧拉法对双三相永磁同步电机的数学模型进行离散化,可以表示为
 (7)
(7)
式中,x为一个变量,可以表示电流、电压等;k为第k次采样周期,k+1为第k+1次采样周期,以此类推;Ts为采样周期。双三相永磁同步电机的离散表达式可以表示为
 (8)
(8)
 (9)
(9)
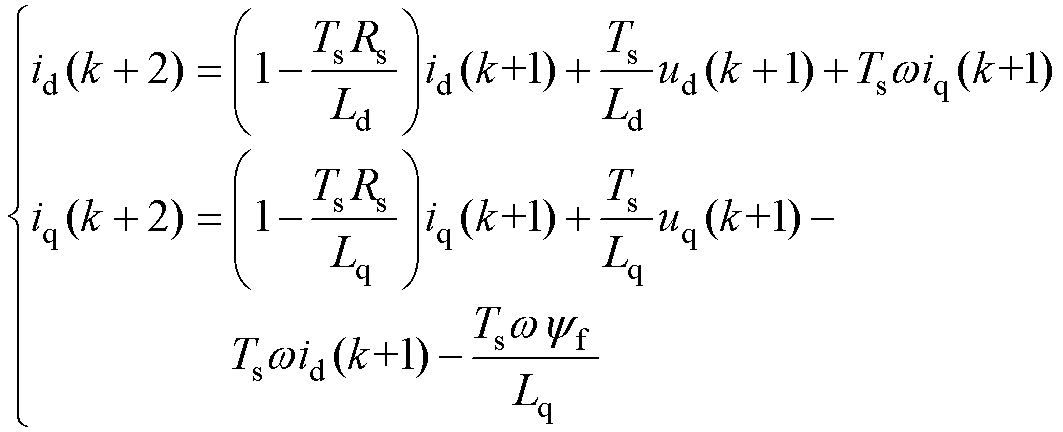
对式(8)和式(9)进行整理可以得到k+1时刻的电流预测值,但是考虑到数字处理引入的期望矢量和实际矢量之间的一步延时会恶化模型预测电流控制的性能,为了解决这一问题,使用两步预测来补偿计算延迟[30],瞬时k+2时刻的电流预测为
 (10)
(10)
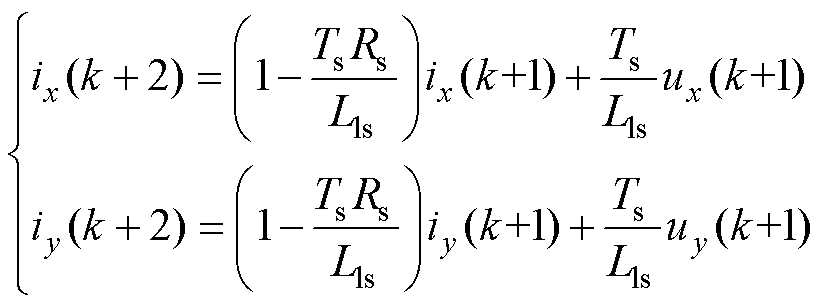 (11)
(11)
给出传统低共模电压的模型预测电流控制方法(the traditional model predictive current control method with Reduced Common-Mode Voltage, RCMV- 36):首先从表1可以看出,G1、G2和G4组产生的都是小共模电压,G3组产生的是中大共模电压,零矢量产生大共模电压。根据传统的模型预测电流的思想,剔除产生中大共模电压和大共模电压的G3组矢量和零矢量,利用产生小共模电压的36个基本电压矢量作为控制集,如图3所示。

图3 具有小共模电压的电压矢量分布
Fig.3 Distribution diagram of voltage vectors with small common-mode voltages
首先,利用上一采样时刻作用于电机的电压矢量来预测k+1时刻的电流值id(k+1), iq(k+1), ix(k+1), iy(k+1)。然后,将k+1时刻的电流作为反馈值对36个基本电压矢量进行预测,得到k+2时刻的电流值id(k+2), iq(k+2), ix(k+2), iy(k+2),接着通过式(12)的价值函数对这36个候选电压矢量进行评估。
 (12)
(12)
式中, 和
和 分别为参考电流在d和q轴上分量;
分别为参考电流在d和q轴上分量; 和
和 分别为参考谐波电流在x和y轴上分量;
分别为参考谐波电流在x和y轴上分量; 为权重系数。
为权重系数。
选择价值函数值最小的电压矢量作为最优电压矢量,将会在下一采样时刻作用于电机。注意:对于双三相永磁同步电机,在设计价值函数时不能忽略xy平面的谐波电流对于系统控制效果的影响,所以引入了谐波电流ixy的权重系数,目的是减少xy平面上的谐波电流,减少定子损耗。另外,为了消除xy平面上的谐波电流并实现相电流正弦化,参考谐波电流( ,
,  )都设置为零。显然,权重系数使得方法复杂化,不同的权重系数会导致不同的电流失真。更重要的是,关于权重系数的调整缺乏理论基础,这使得调整权重系数的工作会花费大量时间。传统减少共模电压的模型预测电流控制方法流程如图4所示。
)都设置为零。显然,权重系数使得方法复杂化,不同的权重系数会导致不同的电流失真。更重要的是,关于权重系数的调整缺乏理论基础,这使得调整权重系数的工作会花费大量时间。传统减少共模电压的模型预测电流控制方法流程如图4所示。
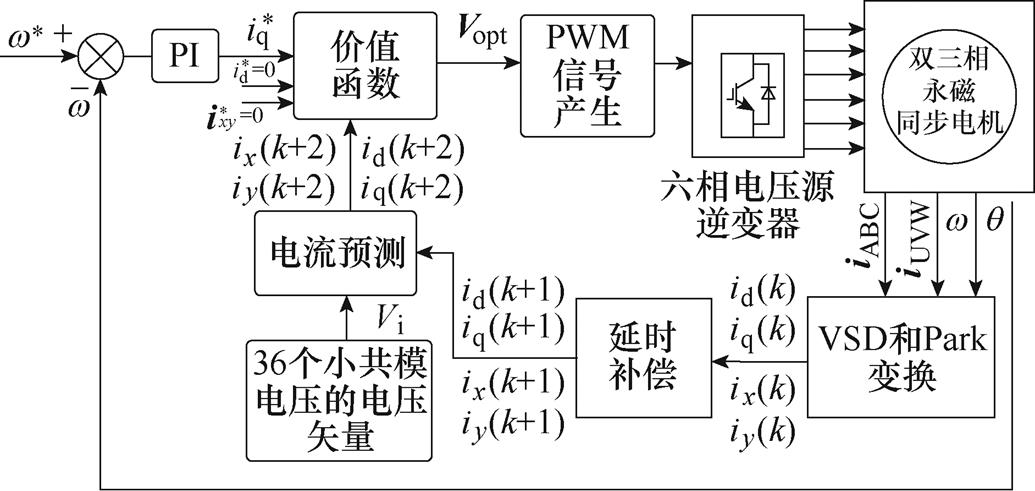
图4 传统减少共模电压的模型预测电流控制方法流程
Fig.4 Flow chart of traditional model predictive current control with reduced common-mode voltage method
合成虚拟电压矢量的目的是降低共模电压和xy平面上的谐波电流。由于图3中的G1、G2、G4组的电压矢量产生小共模电压,考虑利用这三组电压矢量合成虚拟电压矢量来降低共模电压。此外,从式(2)可以看出,双三相永磁同步电机在xy平面上的数学模型可以等效为一个由电机定子电阻与电机自漏感组成的串联电路,因为它们数值是比较小的,所以在xy平面上产生很小的电压就会引起数值很大的谐波电流。这就考虑对xy平面上的电压进行控制。因此,研究了G1、G2和G4这三组电压矢量在空间上的分布,合成了四组虚拟电压矢量。具有减少谐波电流的电压矢量分布如图5所示。图5给出了V44和V65、V44和V21、V65和V56的电压矢量分布,类似地,在ab 平面上,G1和G2组的同向电压矢量、G1和G4组的反向电压矢量、G3和G4组的同向电压矢量都在xy平面上是相反方向,这说明它们关于影响谐波电流方面存在相反的性质。因此,可以设置一定的占空比使它们在xy平面上的平均电压值为零,从而达到减少谐波电流的目的。

图5 具有减少谐波电流的电压矢量分布
Fig.5 Distribution diagram of voltage vector with the harmonic current reduction
虚拟电压矢量的分布如图6所示,首先给出合成的48个虚拟电压矢量分布,将48个虚拟电压矢量分为四组。第一组由12个大虚拟电压矢量组成,记为VVL;第二组由12个中虚拟电压矢量组成,记为VVM;第三组由12小虚拟电压矢量构成,记为VVS;第四组由12个虚拟零电压矢量组成,记为VVZ。
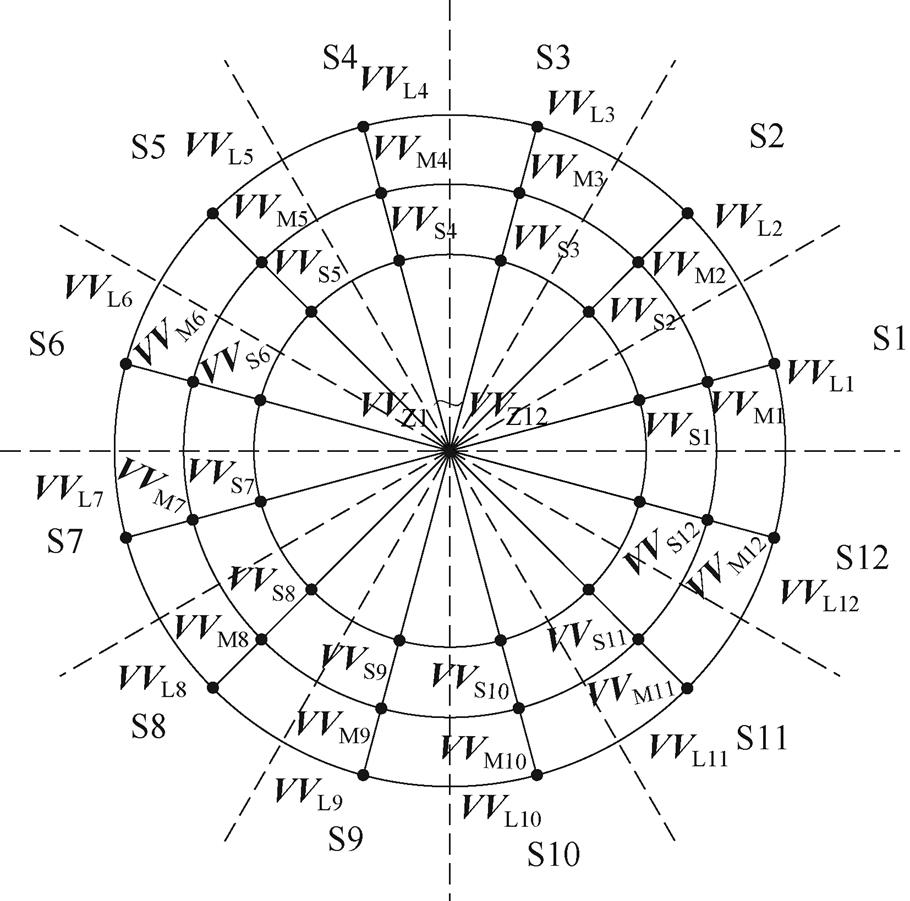
图6 虚拟电压矢量分布
Fig.6 Distribution diagram of the virtual voltage vector
VVL组虚拟电压矢量由ab 平面上G1组和G2组同向的电压矢量合成,如利用V44和V65来合成VVL1,其中l1、l2分别为V44、V65的占空比,表达式为
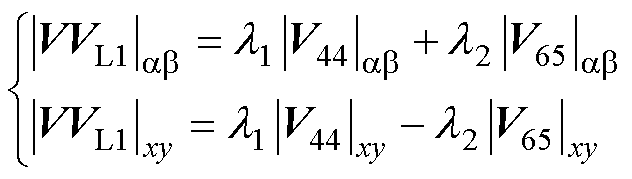 (13)
(13)
式中,|VVL1|ab 和|VVL1|xy分别为虚拟电压矢量VVL1在ab 平面和xy平面上的幅值。虚拟电压矢量VVL1以在xy平面上的平均电压值等于零作为目标条件,有
 (14)
(14)
求解为
 (15)
(15)
VVM组虚拟电压矢量由ab 平面上G1组和G4组的反向电压矢量合成,如利用V44和V21来合成VVM1,其中l3、l4分别为V44、V21的占空比,表达式为
 (16)
(16)
虚拟电压矢量VVM1以在xy平面上的平均电压值等于零作为目标条件,有
 (17)
(17)
求解为
 (18)
(18)
VVS组虚拟电压矢量由ab 平面上G2组和G4组的同向电压矢量合成,如V65和V56来合成VVS1,其中l5、l6分别为V65、V56的占空比,表达式为
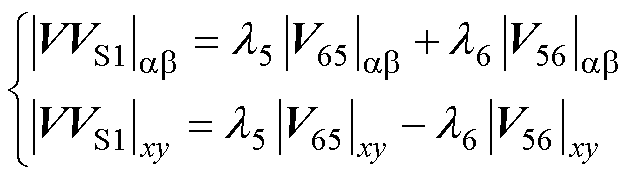 (19)
(19)
同样地,虚拟电压矢量VVS1以在xy平面上的平均电压值等于零作为目标条件,有
 (20)
(20)
求解为
 (21)
(21)
控制集中没有基本零矢量会导致控制裕度下降,造成相电流纹波较大。为了解决这一问题,所提方法引入了额外的12个虚拟电压矢量,即VVZ组的虚拟零电压矢量。虚拟零电压矢量利用在ab 平面上,3个幅值相同、相位相差120 °的大电压矢量作用相同时间来合成。例如,虚拟零电压矢量VVZ1的合成图如图7所示,虚拟零电压矢量VVZ1由V44、V22、V11合成,根据三角形法则可得,当V44、V22、V11作用相同时间时,在xy平面上的平均电压值为零,这保证了虚拟零电压矢量合成时xy平面上没有额外的谐波产生,且在ab 平面上,三者的平均电压值也为零,这就满足了零矢量的概念。注意,从表1可以看到,相较于零矢量来说,虚拟零电压矢量的共模电压大大降低。更重要的是,合成虚拟零电压矢量的3个电压矢量的共模电压是相同的,在一个采样周期内,虚拟零电压矢量作用于电机时共模电压是完全不变的。
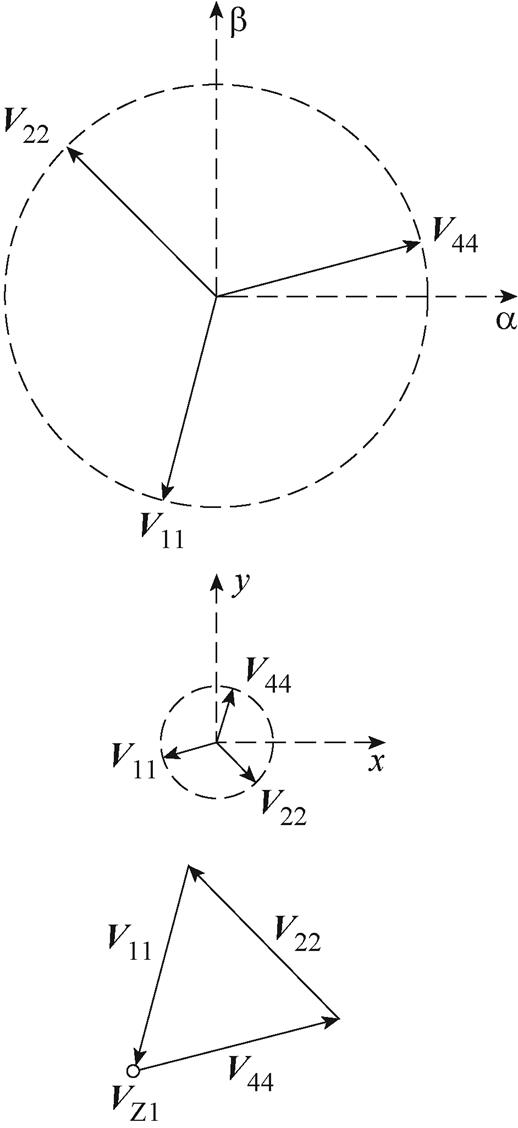
图7 虚拟零电压矢量VVZ1的合成图
Fig.7 Synthesis of virtual zero voltage vector VVZ1
根据伏秒平衡原理,设定V44、V22和V11的占空比分别为m1、m2和m3,则可以根据式(22)计算三者的占空比。
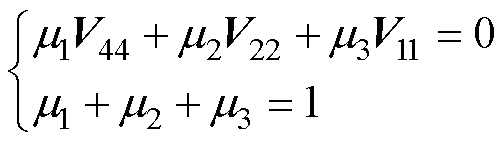 (22)
(22)
由上述可得,虚拟零电压矢量若达到与零矢量相同的效果,则3个电压矢量的占空比也应该是相同的,这就有一组特解,即m1=m2=m3=1/3。
另外,V64、V32、V51、V66、V33、V55和V26、V45、V13这三组电压矢量,也可以根据式(22)来合成虚拟零电压矢量,一共可以合成12个虚拟零电压矢量。虚拟零电压矢量的编号和合成见表2。
表2 虚拟零电压矢量的合成
Tab.2 Synthesis of virtual zero voltage vector
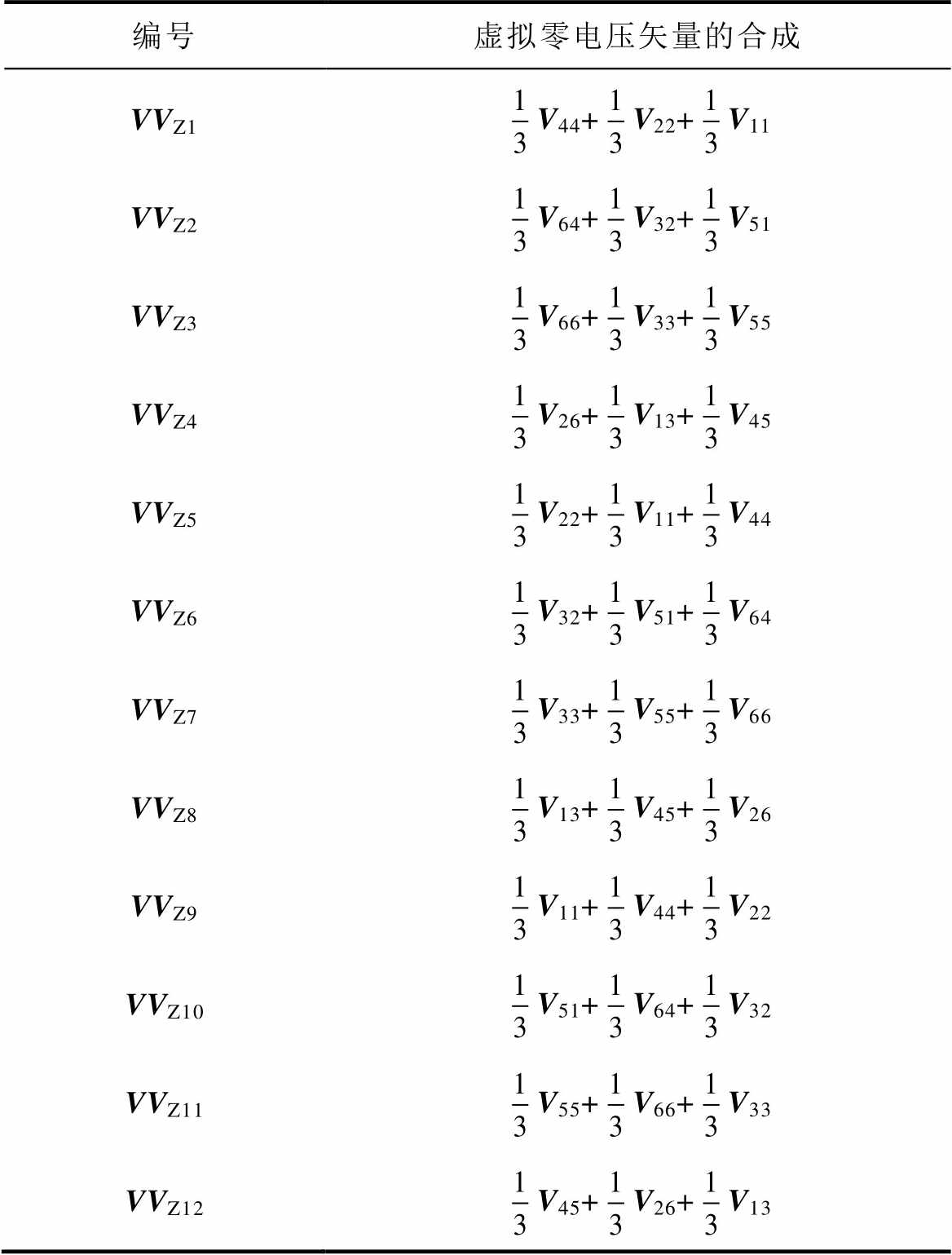
编号虚拟零电压矢量的合成 VVZ1V44+V22+V11 VVZ2V64+V32+V51 VVZ3V66+V33+V55 VVZ4V26+V13+V45 VVZ5V22+V11+V44 VVZ6V32+V51+V64 VVZ7V33+V55+V66 VVZ8V13+V45+V26 VVZ9V11+V44+V22 VVZ10V51+V64+V32 VVZ11V55+V66+V33 VVZ12V45+V26+V13
类似地,VVL、VVM、VVS和VVZ四组中的其他虚拟电压矢量也按本节的理论来合成。所有的虚拟电压矢量在xy平面上的平均电压值都为零,且都为小共模电压,虚拟电压矢量的性质见表3。图8给出四组虚拟电压矢量的电压矢量切换状态,分别以VVL1、VVM1、VVS1和VVZ1为例。
表3 虚拟电压矢量的性质
Tab.3 Properties of the virtual voltage vector

组别|VV|ab|VV|xy|UconN|、|UconM| VVL0.597Udc0Udc VVM0.472Udc0Udc VVS0.345Udc0Udc VVZ00Udc
对已存在的虚拟零电压矢量存在的问题进行分析,文献[26]对于五相电机的虚拟零电压矢量进行了研究,选择相位相反的两个大电压矢量作用相同时间来合成虚拟零电压矢量,如1/2V44+1/2V33,若此方法拓展到双三相永磁同步电机上弊端为:当电压矢量发生切换时(如V44→V33的变化),从表4所示的电压矢量对应的相电压,可以看出,六相中的A相和U相,相电压的跳跃幅值达到4/3Udc,电压变化率增加,逆变器的du/dt过大,将造成电机端子处出现过电压的隐患,而所提方法的虚拟零电压矢量,当电压矢量发生切换时,(如V44→V22→V11的变化),相电压的最大跳跃幅值可以降低至Udc。针对双三相永磁同步电机特有的电压矢量分布,引入了特定的虚拟零电压矢量,且虚拟零电压矢量作用时电机的共模电压是不变的,减少了共模电压的变化频率。
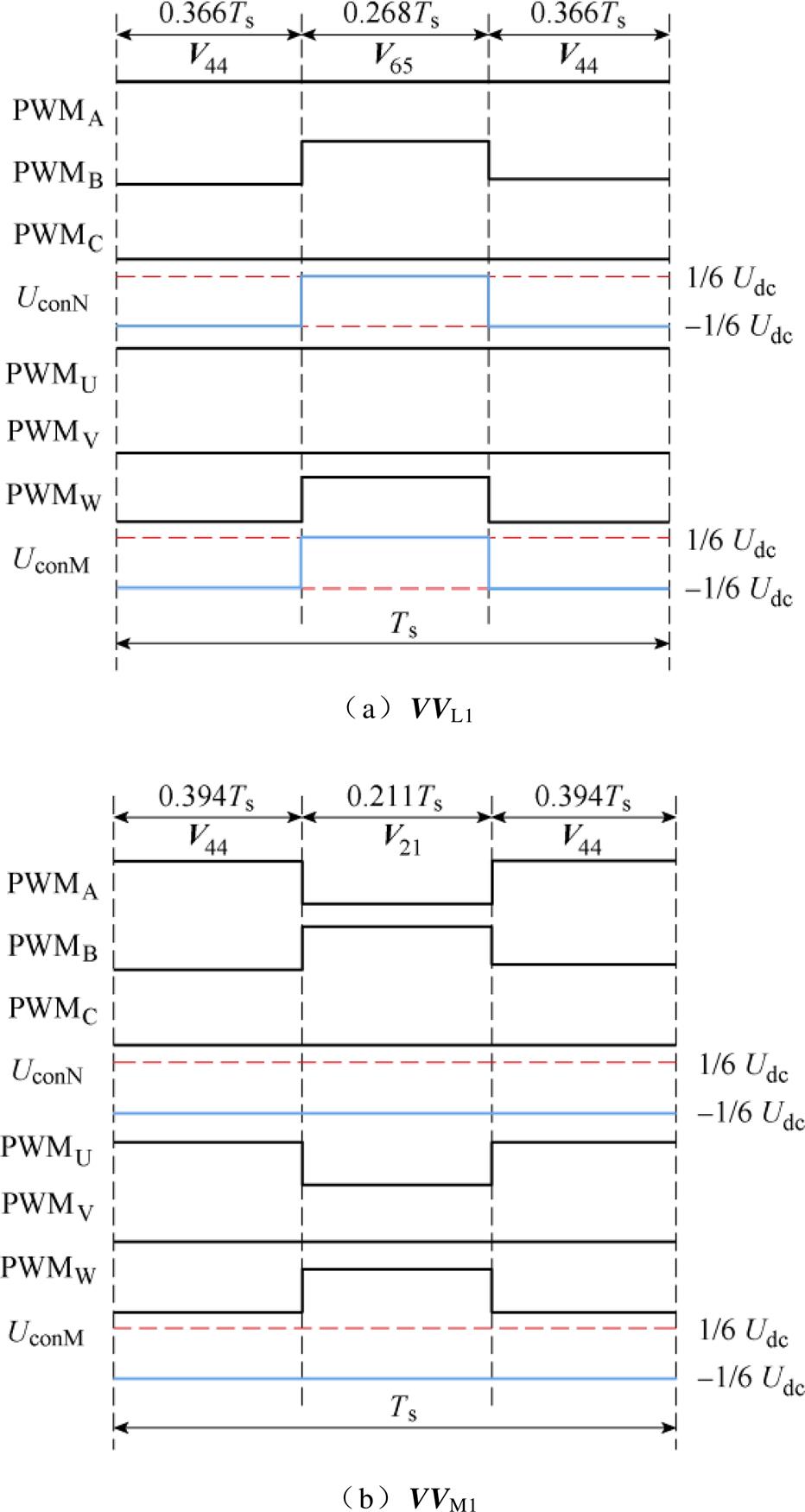

图8 虚拟电压矢量的PWM信号产生
Fig.8 PWM signal generation of virtual voltage vectors
表4 电压矢量对应的相电压
Tab.4 Phase voltages corresponding to voltage vectors

基本电压矢量VANVBNVCNVUMVVMVWM V44 V64 V66 V26 V22 V32 V33 V13 V11 V51 V55 V45 V52
最优电压矢量在48个虚拟电压矢量中选择。为了避免遍历计算,减少计算负担,首先对参考电压矢量进行计算。
根据无差拍电流预测控制原则,应满足
 (23)
(23)
将式(23)代入式(10),参考电压矢量 的d轴和q轴分量可以表示为
的d轴和q轴分量可以表示为
 (24)
(24)
通过式(24)计算,可以获得预期的参考电压矢量,该参考电压矢量可以用复数的形式表示为
 (25)
(25)
式中,j为虚数单位。通过Park反变换将式(25)中的参考电压矢量转换到ab 平面,有
 (26)
(26)
式中, 和
和 分别为参考电压矢量在a 、b 轴上的电压分量。
分别为参考电压矢量在a 、b 轴上的电压分量。
可通过式(27)获得参考电压矢量在ab 平面上的位置为
 (27)
(27)
式(27)确定了参考电压矢量的扇区位置,可以对接近参考电压矢量的电压矢量进行评估,例如,如图6所示,当参考电压矢量落入S1扇区时,参与评估的候选电压矢量为VVL1、VVM1、VVS1、VVZ1。选择表2中适当的虚拟零电压矢量可以降低所提方法的开关频率。
当参考电压矢量落入不同扇区时,根据表5选择相应的候选电压矢量VVLi、VVMi、VVSi、VVZi(i=1, 2, 3,…,12)。
在每个采样周期内需要进行4次价值函数评估,相对RCMV-36方法的36次计算来说,控制器的计算负担大大降低。
为消除谐波项的权重系数,设计了新的价值函数为
 (28)
(28)
式中,Va 和Vb 分别为虚拟电压矢量在a 、b 轴上的电压分量。通过式(28)来评估4个候选电压矢量,其中价值函数最小的为最优电压矢量VVopt。图9为所提方法的流程。
表5 根据参考电压矢量所在位置而确定的候选电压矢量
Tab.5 Candidate voltage vectors according to the location of the reference voltage vector
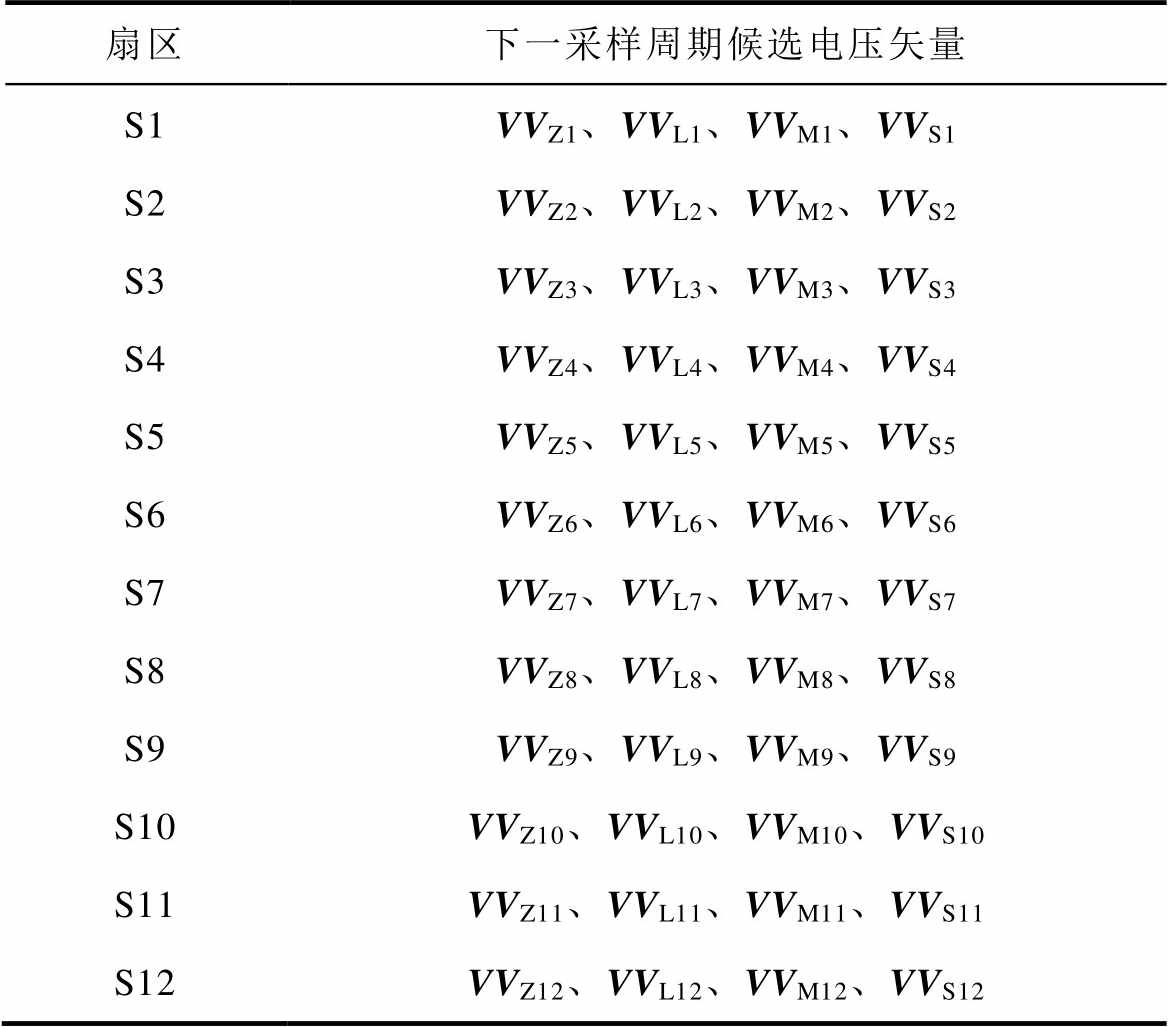
扇区下一采样周期候选电压矢量 S1VVZ1、VVL1、VVM1、VVS1 S2VVZ2、VVL2、VVM2、VVS2 S3VVZ3、VVL3、VVM3、VVS3 S4VVZ4、VVL4、VVM4、VVS4 S5VVZ5、VVL5、VVM5、VVS5 S6VVZ6、VVL6、VVM6、VVS6 S7VVZ7、VVL7、VVM7、VVS7 S8VVZ8、VVL8、VVM8、VVS8 S9VVZ9、VVL9、VVM9、VVS9 S10VVZ10、VVL10、VVM10、VVS10 S11VVZ11、VVL11、VVM11、VVS11 S12VVZ12、VVL12、VVM12、VVS12

图9 所提方法的流程
Fig.9 Flowchart of the proposed method
为了验证所提方法的有效性,搭建了一个基于TMS320F28335的实验平台,如图10所示。直流母线电压为340 V,将两个容值相等的电容串联在直流母线侧引出直流侧中点;采样频率设置为10 kHz;高压探头(Tektronix THDP0100)测量共模电压。电流探头(Tektronix TCO404XL)采集相电流数据。转子位置由10~16位分辨率的旋转数字转换器AD2S1210获得。转矩和转速由转矩传感器(K-T40B-500Q)测量,利用三相异步电机作为负载电机,双三相永磁同步电机的主要参数见表6。MPCC-T和RCMV-36方法的权重系数都设置为0.1。

图10 实验平台
Fig.10 Experimental platform
表6 实验电机参数
Tab.6 Experimental motor parameters

参 数数 值 额定功率/kW28 额定转速/(r/min)3 000 额定转矩/(N·m)90 极对数5 定子电阻/W0.002 d轴电感/mH200 q轴电感/mH200 定子磁链/Wb0.092 转动惯量/(kg·m2)0.02
稳态实验结果如图11所示,在电机转速给定1 500 r/min,负载给定40 N·m工况下,三种方法的稳态电流均达到30 A左右。注意,由图11可以看出,MPCC-VVV-RCMV的相电流质量优于MPCC-T和RCMV-36方法。通过快速傅里叶分析可得,MPCC-VVV-RCMV方法下的相电流总谐波畸变率(Total Harmonic Distortion, THD)和5次谐波畸变率H5均小于MPCC-T和RCMV-36方法。MPCC- VVV-RCMV方法在减少5次谐波方面优于两种传统方法,这与虚拟电压矢量的引入有关。而对于同样具有减少共模电压的RCMV-36方法而言,为了实现减少共模电压,选取小共模电压的基本电压矢量作为控制集,但并未对xy平面的电压进行有效控制。摒弃了零矢量,导致了相电流质量下降。
接着,研究了三种方法对于转矩的影响,定义转矩脉动为
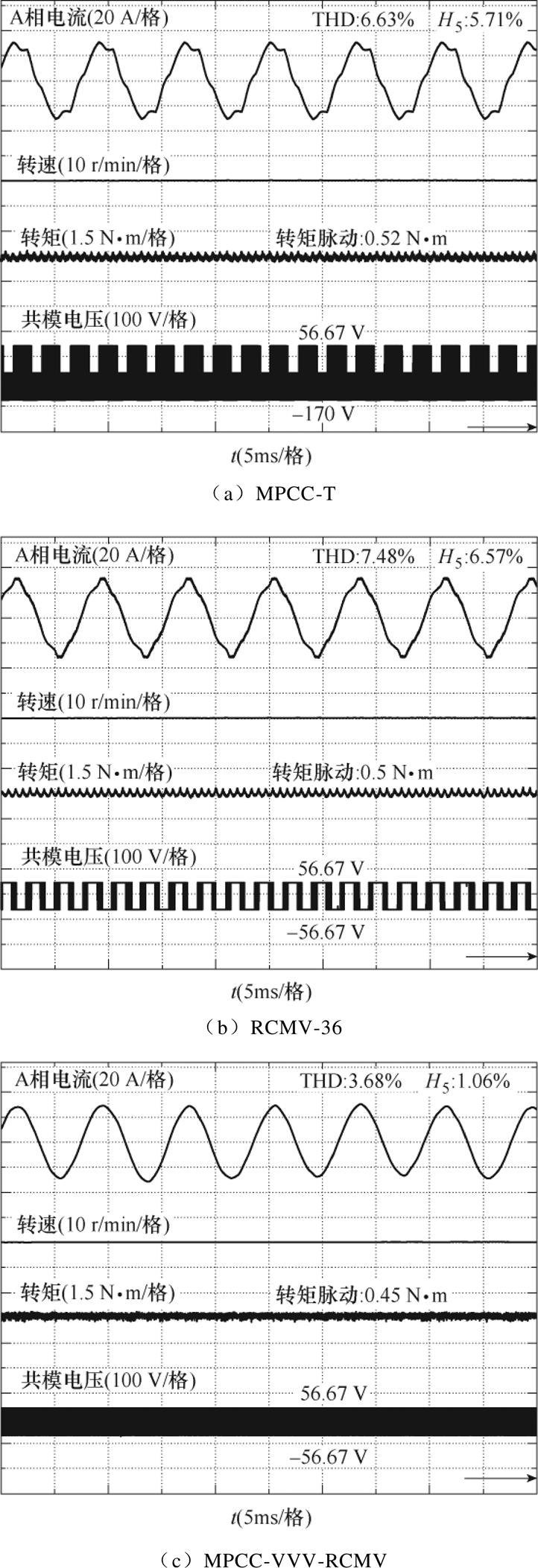
图11 稳态实验结果
Fig.11 Steady state experimental results
 (29)
(29)
式中,Tave为转矩的平均值;Tm为转矩的实际值;n为数据点个数。
从图11中可以对比看出,在MPCC-VVV- RCMV方法下的电机转矩脉动小于MPCC-T和RCMV-36方法。
最后,研究了三种方法下共模电压的幅值,这里测试的是UconN幅值。由图11a~图11c对比可以看出,由于MPCC-T采用零矢量,因此共模电压的负峰值为-170 V,正峰值为56.67 V,峰峰值达到了226.67 V。而对于RCMV-36和MPCC-VVV-RCMV方法而言,由于控制集剔除了零矢量,共模电压的负峰值为-56.67 V,正峰值为56.67 V,峰峰值降低至113.34 V。共模电压的峰峰值范围减小。说明MPCC-VVV-RCMV方法有效地减少了共模电压。
对三种方法下的动态性能进行了研究。动态实验结果如图12所示。在电机转速给定1 500 r/min情况下,负载从20 N·m增加到40 N·m。从图12c可以看出,电机转速曲线平滑,MPCC-VVV-RCMV方法提供了更正弦化和高质量的相电流波形。此外,电磁转矩还可以快速跟踪负载指令,且变化稳定。证明了MPCC-VVV-RCMV继承了前两种传统模型预测电流控制方法良好的动态响应能力。
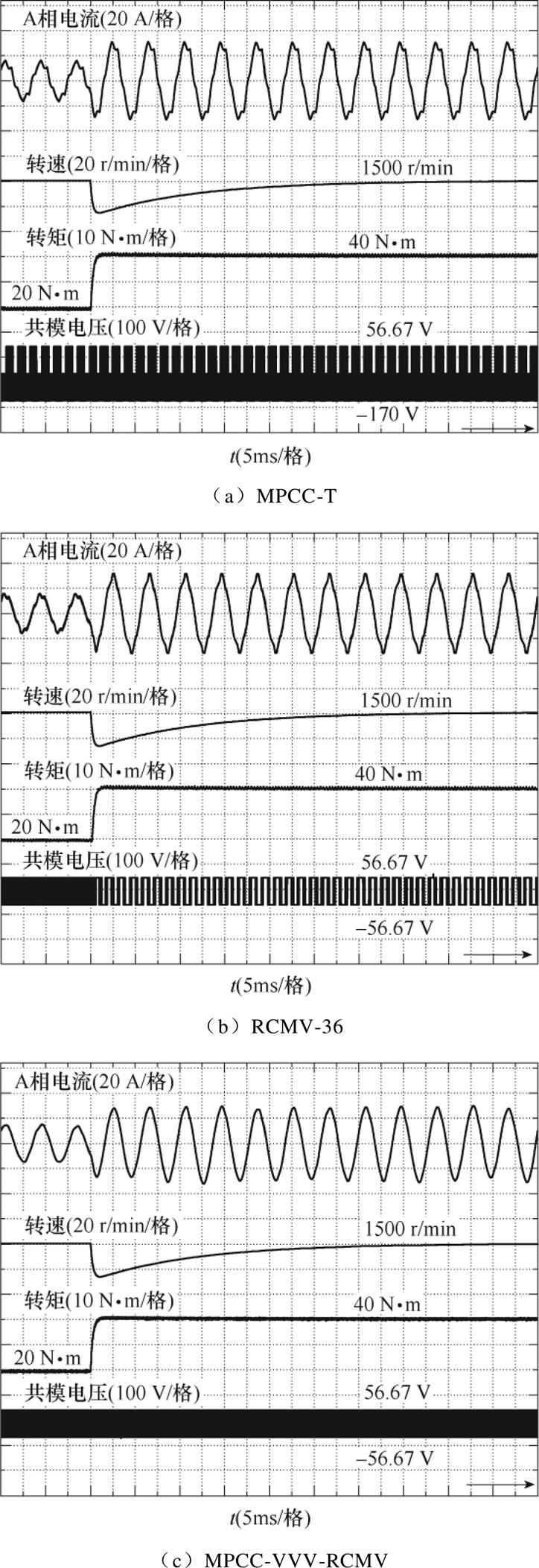
图12 动态实验结果
Fig.12 Dynamic state experimental results
通过计算在恒定时间内,六相两电平逆变器的12个开关器件总跳变次数,测试了电机转速在300~2 400 r/min范围内三种方法下的平均开关频率。平均开关频率的定义为
 (30)
(30)
式中,fave,A、fave,B、fave,C、fave,U、fave,V和fave,W分别为A、B、C、U、V和W相的平均开关频率。
平均开关频率实验结果如图13所示,MPCC- VVV-RCMV方法下系统的平均开关频率高于RCMV-36和MPCC-T。这是因为MPCC-VVV-RCMV采用了虚拟电压矢量,在一个采样周期内有两个或者三个电压矢量发生切换,这给开关器件带来了更多的动作。而RCMV-36和MPCC-T方法在一个采样周期内只使用一个电压矢量,所以平均开关频率较低。
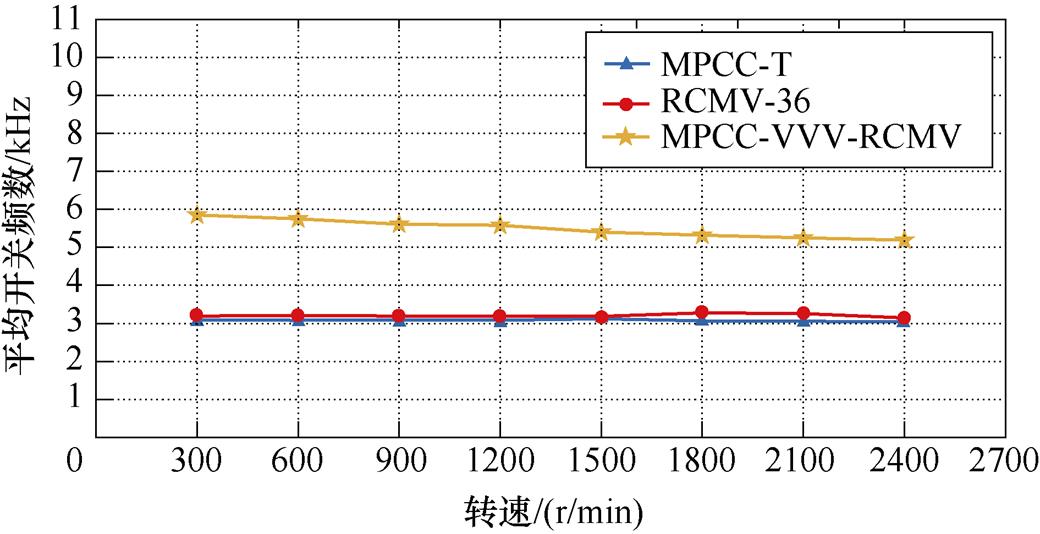
图13 平均开关频率实验结果
Fig.13 Experimental results of average switching frequency
考虑到电机在运行的过程中,电机的参数会发生变化,例如:电机温度提升会导致电阻增加,或者过载条件下会出现电感饱和现象,导致电感值下降等情况。设计了五组实验,来研究非理想预测模型对控制性能的影响,即验证参数变化对于控制性能的影响,下面给出了电机电阻和电感的五种情况:情况1:电阻和电感值不变;情况2:电阻值增加20 %,电感值不变;情况3:电阻值减少20 %,电感值不变;情况4:电阻值不变,电感值增加20 %;情况5:电阻值不变,电感值减少20 %。
电机参数变化时实验结果如图14所示。从图14中可以看出,尽管电阻和电感发生了变化,但是输出电流波形仍保持良好。因此,当电机参数在一定范围内变化时,所提方法具有较强的鲁棒性。
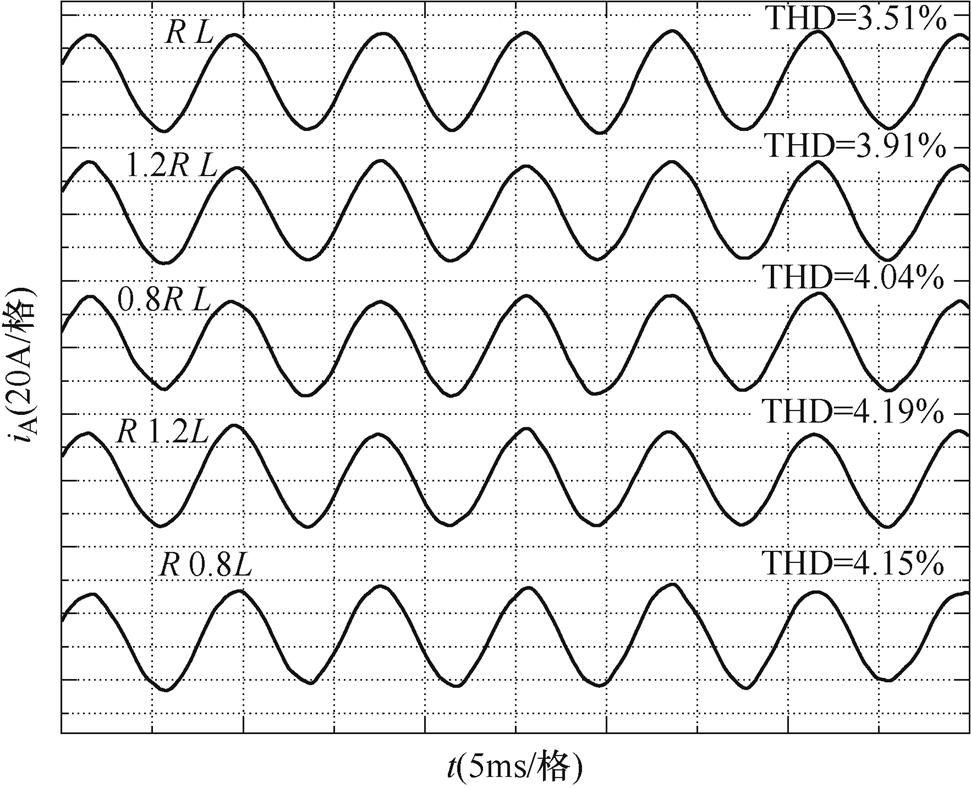
图14 电机参数变化时实验结果
Fig.14 Experimental results of motor parameter changes
虽然MPCC-VVV-RCMV的控制集由48个虚拟电压矢量组成。但是,通过计算参考电压矢量位置来精简候选电压矢量,避免了对所有的虚拟电压矢量进行遍历的预测计算,使得在每个采样周期内,只进行1次参考电压矢量的计算和4次价值函数的评估。计算负担对比见表7。可以看出,所提方法相较于MPCC-T和RCMV-36方法显著地减少了控制器计算负担。
表7 计算负担对比
Tab.7 Comparison of calculation burden
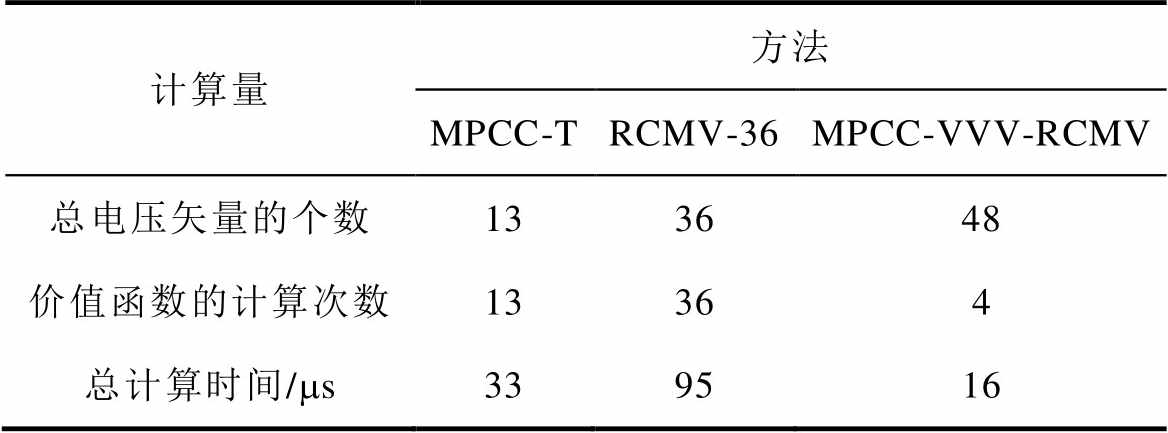
计算量方法 MPCC-TRCMV-36MPCC-VVV-RCMV 总电压矢量的个数133648 价值函数的计算次数13364 总计算时间/ms339516
本文介绍了一种双三相永磁同步电机低共模电压模型预测电流控制,目的是减少共模电压和谐波电流。控制集中48个虚拟电压矢量具有小共模电压,且48个虚拟电压矢量在xy平面上的平均电压值为零,减少了xy平面上的谐波电流。所提方法中的价值函数消除了谐波电流项的权重系数。另外,在48个虚拟电压矢量中,根据参考电压矢量的位置,确立了4个候选的电压矢量,通过定义的新价值函数进行评估,确定出最优的电压矢量。
将所提方法与现有的传统模型预测电流方法进行了比较,得到以下结论:
1)与MPCC-T相比,本文提出的方法将共模电压峰值限制为-Udc/6和Udc/6,减少了共模电压。
2)所提方法在电流质量上优于RCMV-36和MPCC-T。此外,消除了价值函数中的谐波项权重系数,避免了繁琐的权重系数的调整工作。
3)与RCMV-36相比,所提方法大大降低了计算量。
4)与现有的虚拟零电压矢量方法相比,所提方法的电压变化率降低了约25 %。
5)与MPCC-T和RCMV-36方法相比,所提方法平均开关频率较高。
参考文献
[1] 黄林森, 赵文祥, 吉敬华, 等. 稳态性能改善的双三相永磁电机直接转矩控制[J]. 电工技术学报, 2022, 37(2): 355-367.
Huang Linsen, Zhao Wenxiang, Ji Jinghua, et al. Direct torque control for dual three-phase permanent- magnet machine with improved steady-state perfor- mance[J]. Transactions of China Electrotechnical Society, 2022, 37(2): 355-367.
[2] 赵勇, 黄文新, 林晓刚, 等. 基于权重系数消除和有限控制集优化的双三相永磁容错电机快速预测直接转矩控制[J]. 电工技术学报, 2021, 36(1): 3-14.
Zhao Yong, Huang Wenxin, Lin Xiaogang, et al. Fast predictive direct torque control of dual three-phase permanent magnet fault tolerant machine based on weighting factor elimination and finite control set optimization[J]. Transactions of China Electro- technical Society, 2021, 36(1): 3-14.
[3] 佟明昊, 程明, 许芷源, 等. 电动汽车用车载集成式充电系统若干关键技术问题及解决方案[J]. 电工技术学报, 2021, 36(24): 5125-5142.
Tong Minghao, Cheng Ming, Xu Zhiyuan, et al. Key issues and solutions of integrated on-board chargers for electric vehicles[J]. Transactions of China Elec- trotechnical Society, 2021, 36(24): 5125-5142.
[4] Hu Sideng, Liang Zipeng, Zhang Wei, et al. Research on the integration of hybrid energy storage system and dual three-phase PMSM drive in EV[J]. IEEE Transactions on Industrial Electronics, 2018, 65(8): 6602-6611.
[5] Liu Senyi, Liu Chunhua. Direct harmonic current control scheme for dual three-phase PMSM drive system[J]. IEEE Transactions on Power Electronics, 2021, 36(10): 11647-11657.
[6] Zhang Zhifeng, Wu Yue, Su Hequn, et al. Research on open-circuit fault tolerant control of six-phase permanent magnet synchronous machine based on fifth harmonic current injection[J]. CES Transactions on Electrical Machines and Systems, 2022, 6(3): 306-314.
[7] Wang Zheng, Wang Xueqing, Cheng Ming, et al. Comprehensive investigation on remedial operation of switch faults for dual three-phase PMSM drives fed by T-3L inverters[J]. IEEE Transactions on Industrial Electronics, 2018, 65(6): 4574-4587.
[8] Wang Xueqing, Wang Zheng, Xu Zhixian. A hybrid direct torque control scheme for dual three-phase PMSM drives with improved operation perfor- mance[J]. IEEE Transactions on Power Electronics, 2019, 34(2): 1622-1634.
[9] 李祥林, 薛志伟, 阎学雨, 等. 基于电压矢量快速筛选的永磁同步电机三矢量模型预测转矩控制[J].电工技术学报, 2022, 37(7): 1666-1678.
Li Xianglin, Xue Zhiwei, Yan Xueyu, et al. Voltage vector rapid screening-based three-vector model predictive torque control for permanent magnet synchronous motor[J]. Transactions of China Electro- technical Society, 2022, 37(7): 1666-1678.
[10] Song Wensheng, Xue Cheng, Wu Xuesong, et al. Modulated finite-control-set model predictive current control for five-phase voltage-source inverter[J]. IEEE Transactions on Transportation Electrification, 2021, 7(2): 718-729.
[11] 陈卓易, 屈稳太. 基于PID型代价函数的永磁同步电机模型预测电流控制[J]. 电工技术学报, 2021, 36(14): 2971-2978.
Chen Zhuoyi, Qu Wentai. Model predictive current control for permanent magnet synchronous motors based on PID-type cost function[J]. Transactions of China Electrotechnical Society, 2021, 36(14): 2971- 2978.
[12] 徐艳平, 王极兵, 张保程, 等. 永磁同步电机三矢量模型预测电流控制[J]. 电工技术学报, 2018, 33(5): 980-988.
Xu Yanping, Wang Jibing, Zhang Baocheng, et al. Three-vector-based model predictive current control for permanent magnet synchronous motor[J]. Transa- ctions of China Electrotechnical Society, 2018, 33(5): 980-988.
[13] Xue Cheng, Song Wensheng, Wu Xuesong, et al. A constant switching frequency finite-control-set predi- ctive current control scheme of a five-phase inverter with duty-ratio optimization[J]. IEEE Transactions on Power Electronics, 2018, 33(4): 3583-3594.
[14] Saeed M S R, Song Wensheng, Yu Bin, et al. Low- complexity deadbeat model predictive current control with duty ratio for five-phase PMSM drives[J]. IEEE Transactions on Power Electronics, 2020, 35(11): 12085-12099.
[15] Zhao Wenxiang, Tao Tao, Zhu Jihong, et al. A novel finite-control-set model predictive current control for five-phase PM motor with continued modulation[J]. IEEE Transactions on Power Electronics, 2020, 35(7): 7261-7270.
[16] Luo Yixiao, Liu Chunhua. Elimination of harmonic currents using a reference voltage vector based-model predictive control for a six-phase PMSM motor[J]. IEEE Transactions on Power Electronics, 2019, 34(7): 6960-6972.
[17] Zhang Zhen, Wang Zhichao, Wei Xile, et al. Space- vector-optimized predictive control for dual three- phase PMSM with quick current response[J]. IEEE Transactions on Power Electronics, 2022, 37(4): 4453-4462.
[18] Yu Bin, Song Wensheng, Guo Yongqi. A simplified and generalized SVPWM scheme for two-level multiphase inverters with common-mode voltage reduction[J]. IEEE Transactions on Industrial Elec- tronics, 2022, 69(2): 1378-1388.
[19] 郭磊磊, 金楠, 许烈. 采用混合电压矢量预选和参考电压预测的逆变器共模电压尖峰消除方法[J]. 中国电机工程学报, 2018, 38(17): 5167-5176, 5314.
Guo Leilei, Jin Nan, Xu Lie. Common-mode voltage spikes elimination method for inverters using hybrid voltage vector preselection and reference voltage prediction[J]. Proceedings of the CSEE, 2018, 38(17): 5167-5176, 5314.
[20] 郭磊磊, 金楠, 窦智峰, 等. 一种改进的永磁同步发电机模型预测共模电压抑制方法[J]. 中国电机工程学报, 2017, 37(16): 4810-4818, 4906.
Guo Leilei, Jin Nan, Dou Zhifeng, et al. An improved model predictive control based common-mode voltage suppression strategy for permanent magnet syn- chronous generators[J]. Proceedings of the CSEE, 2017, 37(16): 4810-4818, 4906.
[21] 郑剑, 荣飞, 黄守道, 等. 基于共模电压抑制的双Y移30 °六相SVPWM方法[J]. 中国电机工程学报, 2017, 37(24): 7338-7349, 7448.
Zheng Jian, Rong Fei, Huang Shoudao, et al. Dual Y shift 30°six-phase SVPWM method based on suppression of common-mode voltage[J]. Proceedings of the CSEE, 2017, 37(24): 7338-7349, 7448.
[22] 姜艳姝, 徐殿国, 陈希有, 等. 一种新颖的用于消除PWM逆变器输出共模电压的有源滤波器[J]. 中国电机工程学报, 2002, 22(10): 125-129
Jiang Yanshu, Xu Dianguo, Chen Xiyou, et al. A novel PWM inverter output active filter for common- mode voltage cancellation[J]. Proceedings of the CSEE, 2002, 22(10): 125-129.
[23] 高强, 徐殿国. PWM逆变器输出端共模与差模电压dv/dt滤波器设计[J]. 电工技术学报, 2007, 22(1): 79-84.
Gao Qiang, Xu Dianguo. Design of common-mode and differential-mode voltage dv/dt filter at PWM inverter output terminals[J]. Transactions of China Electrotechnical Society, 2007, 22(1): 79-84.
[24] 佘阳阳, 杨柏旺, 吴志清, 等. 基于载波和空间矢量调制之间联系的多电平VSI降低和消除共模电压的PWM策略[J]. 电工技术学报, 2015, 30(4): 171-178.
She Yangyang, Yang Bowang, Wu Zhiqing, et al. PWM algorithm for multi-level VSI with reduced and eliminated common mode voltage based on relation- ship between CBPWM and SVPWM[J]. Transactions of China Electrotechnical Society, 2015, 30(4): 171-178.
[25] 余彬, 宋文胜, 冯加旭, 等. 基于虚拟电压矢量的五相电压源逆变器空间矢量调制算法[J]. 中国电机工程学报, 2020, 40(1): 212-221, 388.
Yu Bin, Song Wensheng, Feng Jiaxu, et al. Virtual voltage vectors based space vector PWM method for five phase voltage source inverters[J]. Proceedings of the CSEE, 2020, 40(1): 212-221, 388.
[26] Yu Bin, Song Wensheng, Guo Yongqi, et al. Virtual voltage vector-based model predictive current control for five-phase VSIs with common-mode voltage redu- ction[J]. IEEE Transactions on Transportation Elec- trification, 2021, 7(2): 706-717.
[27] 徐质闲, 王政, 王学庆, 等. T型三电平双三相永磁同步电机驱动零共模电压模型预测控制[J]. 中国电机工程学报, 2020, 40(13): 4301-4310.
Xu Zhixian, Wang Zheng, Wang Xueqing, et al. A predictive current control method for a T-type three- level dual three-phase PMSM with zero common- mode voltage[J]. Proceedings of the CSEE, 2020, 40(13): 4301-4310.
[28] Duran M J, Riveros J A, Barrero F, et al. Reduction of common-mode voltage in five-phase induction motor drives using predictive control techniques[J]. IEEE Transactions on Industry Applications, 2012, 48(6): 2059-2067.
[29] Argas R V, Ammann U, Rodriguez J, et al. Predictive strategy to control common-mode voltage in loads fed by matrix converters[J]. IEEE Transactions on Indu- strial Electronics, 2008, 55(12): 4372-4380.
[30] Cortes P, Rodriguez J, Silva C, et al. Delay compensation in model predictive current control of a three-phase inverter[J]. IEEE Transactions on Indu- strial Electronics, 2012, 59(2): 1323-1325.
Abstract Compared with three-phase motors, dual three-phase permanent magnet synchronous motors (DT-PMSM) have better fault tolerance, higher efficiency, and higher torque density. Therefore, it is widely used in high-reliability fields, such as electric vehicles, ships, and aerospace.
The model predictive control (MPC) method has the characteristics of fast dynamic response and simple structure, compared with field-oriented control and direct torque control methods. Therefore, it has been intensively studied in recent years. However, when the traditional MPC is applied to the DT-PMSM, larger harmonic currents and severe computational burden are the existing issues. In addition, the common-mode voltage generated by the driving system can shorten the life of the motor and produce electromagnetic interference.
Therefore, a model predictive current control method with low common-mode voltage is proposed. The proposed method consists of three steps. First, the voltage vectors with small common-mode voltage are analyzed. The virtual voltage vectors are synthesized as the input control set to suppress the common-mode voltage and reduce the harmonic current. Then, to avoid the ergodic prediction voltage vector, the position of the reference voltage vector is obtained by the deadbeat current control method to reduce the candidate voltage vector. Finally, the cost function of the unweighting factor is designed. The candidate voltage vectors are evaluated, and the optimal voltage vector is selected. It solves the issue that the weighting factor is difficult to design without theoretical basis.
An experiment is designed to compare the traditional model predictive current control method (MPCC-T), the traditional model predictive current control method with reduced common-mode voltage (RCMV-36) and the proposed MPCC-VVV-RCMV method. Firstly, the phase currents of the three methods are analyzed by the fast Fourier transform algorithm. The total harmonic current distortion rates of MPCC-T, RCMV-36, and the proposed method are 6.63 %, 7.48 %, and 3.68 %, respectively. The fifth harmonic distortion rates of the three methods are 5.71 %, 6.57 %, and 1.06 %, which proves that the proposed method provides higher-quality phase currents and reduces the harmonic current in the x-y plane. Secondly, the common-mode voltage under the three methods is tested. The negative peak value of the common-mode voltage under the MPCC-T method is (-1/2)Udc, and the positive peak value is (1/6)Udc. However, with RCMV-36 and the proposed method, the negative peak value of the common-mode voltage is (-1/6)Udc, and the positive peak value is (1/6)Udc. Which indicates that the proposed method can effectively reduce the common-mode voltage. In addition, considering that the motor parameters will change during operation, the influence of the non-ideal prediction model on the control performance is also studied. The results show that the output current waveform keeps well despite the change of resistance and inductance. Therefore, when the motor parameters change within a specific range, the proposed method is robust. Finally, the total execution time of the three methods in the controller is compared. The total execution time of MPCC-T, RCMV-36, and the proposed method in the controller is 33 ms, 95 ms, and 16 ms, respectively, which shows that the proposed method can reduce the computational burden on the controller.
The proposed method is compared with two existing traditional methods. The following conclusions are obtained: (1) The proposed MPCC-VVV-RCMV method can effectively reduce the common-mode voltage and the harmonic current. (2) The proposed MPCC-VVV-RCMV method eliminates the weight factors in the cost function, avoids the tedious adjustment task, and reduces the computational burden. (3) The shortcoming of the proposed MPCC-VVV-RCMV method is the high average switching frequency.
keywords:Model predictive current control, dual three-phase permanent magnet synchronous motor, common-mode voltage, virtual voltage vector, weighting factor
国家自然科学基金资助项目(61603263)。
收稿日期 2022-08-22
DOI: 10.19595/j.cnki.1000-6753.tces.221611
中图分类号:TM351
孙全增 男,1997年生,博士研究生,研究方向多相电机控制。E-mail: 1074287890@qq.com
张志锋 男,1981年生,教授,博士生导师,研究方向为现代电机控制技术、多相电机控制、电动汽车电驱动控制系统等。E-mail: zzf_sut@126.com(通信作者)
改稿日期 2022-09-15
(编辑 崔文静)