面向风电机组最大功率点跟踪的转矩曲线增益动态优化
周连俊1 李 群2 殷明慧1 杨炯明3 邹 云1
(1.南京理工大学自动化学院 南京 210094 2.国网江苏省电力有限公司电力科学研究院 南京 211103 3.江苏金风科技有限公司 盐城 224100)
摘要 最优转矩法是实现风电机组最大功率点跟踪的常用方法。为了提高其在湍流风速下的风能捕获性能,转矩曲线的增益系数设定需要全面考虑湍流风速特征的影响。现有研究通过构建最优参数模型实现增益系数随时变湍流风速特征的动态优化。然而,由于转矩曲线的最优增益系数同时与平均风速、湍流强度及湍流频率三个特征指标存在复杂的非线性函数关系,构建最优参数模型需要基于大量的湍流风速样本,巨大的动态仿真计算量非常耗时,很难实现批量化工程应用。为此,该文发现最优转矩增益系数与最优转矩法对应的风能捕获效率存在强相关性,进而将基于三变量的最优参数模型降维简化为单变量,并在此基础上提出了转矩增益动态优化的最大功率点跟踪控制方法。该方法在同样全面考虑湍流风速特征、维持高风能捕获效率的同时,显著降低了构建最优参数模型的计算与时间成本。基于FAST软件的仿真验证了该方法的有效性。
关键词:风力发电 最大功率点跟踪 转矩曲线增益 数字孪生
0 引言
为了最大化捕获风能,风电机组在额定风速以下通常运行于最大功率点跟踪(Maximum Power Point Tracking, MPPT)[1-2]模式。目前,大型风电机组一般采用最优转矩(Optimal Torque, OT)法[3]实现MPPT控制。
面对大转动惯量风轮固有的缓慢动态特性和由湍流风速决定的跟踪目标快速变化,OT方法作用下的风轮实际上很难跟踪上最大功率点,进而导致跟踪损失问题[3-7]。究其原因,OT方法基于稳态视角,围绕最大功率点(即稳态工作点)展开设计,忽略了MPPT动态。为此,学者们认识到MPPT控制设计应由稳态视角扩展到动态视角[4-8],并针对OT方法分别提出了减小转矩增益(Decreased Torque Gain, DTG)[7]和收缩跟踪区间[8]两种改进方法。
这两种方法蕴含着相同的改进思想:适当放弃低风速区间的风能捕获,以换取风能富集的高风速区间的跟踪效益,进而获得风能捕获效率的整体提升。该思想通过优化设定改进OT方法的转矩曲线参数来实现,具体是转矩增益系数[7]或起始发电转速[8]。进一步研究表明,转矩曲线的参数优化与随时间变化的湍流风速特征(包括平均风速、湍流强度和湍流频率)密切相关[7-10]。因此,考虑MPPT动态的OT改进方法实质上是根据时变的湍流风速特征动态地优化调整转矩曲线。
根据湍流风速动态调整转矩曲线的策略可大致归纳为两类:一类是自适应搜索算法[11-12],其不依赖风电机组模型,但由于湍流风况变化的影响,容易出现因搜索过程不收敛致使风能捕获效率反而降低的问题[12-13];另一类则是基于风电机组模型,将离线构建转矩曲线最优参数-湍流风速特征指标的关系模型与在线优化转矩曲线的参数相结合,实现风电机组MPPT对三种湍流风速特征的综合考虑[10,14-16]。归功于最优参数模型的事先生成,该类方法能够有效提升风能捕获效率,且对湍流风况具有很强的适应性。为方便描述,本文将此类方法称为最优参数模型(Optimal Parameter Model, OPM)方法。
现有研究表明,三种湍流风速特征会影响MPPT动态及风能捕获效率,而且影响作用相互耦合[17]。为离线构建转矩曲线最优参数与平均风速、湍流强度和湍流频率的关系模型,需要获取风电机组实际面对湍流风速的大量样本数据,付出巨大的动态仿真计算量。在风电场高度定制化、精细化运维的发展趋势下,现有最优参数模型方法很难被批量、快速地部署。
为了克服多输入变量的最优参数模型难以快速构建的问题,本文发现OT方法对应的风能捕获效率 能够表征多个湍流风速特征对风电机组MPPT的综合影响。而且基于Spearman秩相关系数[18-20]的统计分析发现,转矩曲线的最优增益系数
能够表征多个湍流风速特征对风电机组MPPT的综合影响。而且基于Spearman秩相关系数[18-20]的统计分析发现,转矩曲线的最优增益系数 与呈现强正相关性。在此基础上,本文提出了转矩曲线增益系数动态优化方法。该方法将基于三变量(平均风速、湍流强度和湍流频率)的模型降维简化为基于单变量()的模型,大幅降低了构建模型的计算成本。同时,借鉴数字孪生技术[21-22],通过在风电机组控制器中同步运行虚拟孪生风电机组来获取。最后,本文利用FAST软件[23-24],以NREL CART3风电机组[25]为对象,仿真验证了本文方法在维持高风能捕获效率的前提下,有效降低了部署时间。
与呈现强正相关性。在此基础上,本文提出了转矩曲线增益系数动态优化方法。该方法将基于三变量(平均风速、湍流强度和湍流频率)的模型降维简化为基于单变量()的模型,大幅降低了构建模型的计算成本。同时,借鉴数字孪生技术[21-22],通过在风电机组控制器中同步运行虚拟孪生风电机组来获取。最后,本文利用FAST软件[23-24],以NREL CART3风电机组[25]为对象,仿真验证了本文方法在维持高风能捕获效率的前提下,有效降低了部署时间。
1 OT方法及其改进
1.1 OT方法
应用OT方法的风电机组模型如下[8]。
风电机组气动模型为
式中, 为气动转矩;
为气动转矩; 为风速;
为风速; 为空气密度;
为空气密度; 为风轮半径;
为风轮半径; 为风能利用系数;
为风能利用系数; 为风轮的角速度;l为叶尖速比,
为风轮的角速度;l为叶尖速比, 。
。
风电机组传动链模型为
 (2)
(2)
式中, 为转动惯量;
为转动惯量; 为电磁转矩。
为电磁转矩。
OT方法控制下的电磁转矩输出为
 (4)
(4)
式中, 即为最优转矩曲线(如图1蓝线所示);
即为最优转矩曲线(如图1蓝线所示); 为起始发电转速;
为起始发电转速; 和
和 分别为最佳叶尖速比和对应的最大风能利用系数。
分别为最佳叶尖速比和对应的最大风能利用系数。
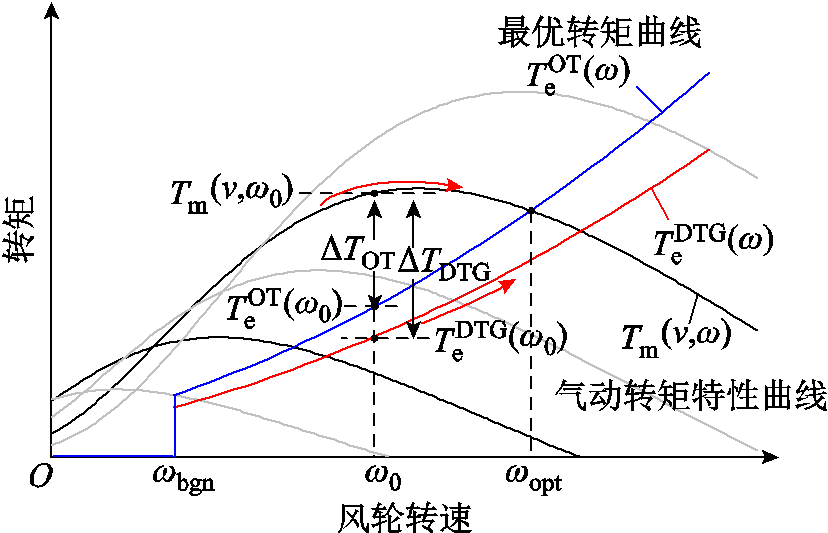
OT方法与DTG方法的原理图如图1所示。OT方法根据风轮的实际转速和,调节风电机组输出电磁转矩。风电机组输入转矩则会在转速变化过程中自主沿着自身的气动转矩特性曲线 变化。图1所示灰色抛物线为对应不同风速的曲线。两者形成的传动链不平衡转矩,使得风轮加速或减速。若风速保持不变,转速将收敛至最大功率点对应的最优转速
变化。图1所示灰色抛物线为对应不同风速的曲线。两者形成的传动链不平衡转矩,使得风轮加速或减速。若风速保持不变,转速将收敛至最大功率点对应的最优转速 ,从而实现最大功率点跟踪。而曲线与曲线的交点实际上就是对应于不同风速的稳态工作点。
,从而实现最大功率点跟踪。而曲线与曲线的交点实际上就是对应于不同风速的稳态工作点。
1.2 减小转矩增益方法
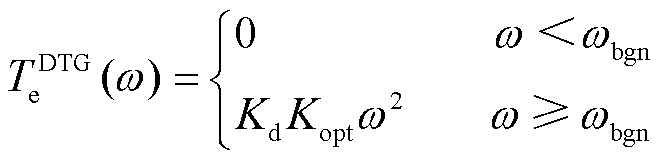
由OT方法的基本原理可知,其忽视了风速变化过程中,风电机组在不同稳态工作点之间跟踪的动态过程及其性能[3-8]。然而,风电机组的大转动惯量意味着其跟踪湍流风的动态响应性能不佳,这导致MPPT阶段的风电机组绝大部分时间均处于跟踪风速的过程中,而不是运行于稳态工作点[4,26-27]。鉴于此,文献[7]提出了DTG方法。在的基础上乘以一个小于1的增益系数 ,即
,即
使得图1红线所示DTG方法的转矩曲线 整体位于下方,从而增大风轮在加速时的不平衡转矩,帮助其更快地逼近最优转速。但是,与此同时,减速时的不平衡转矩减小,减速跟踪性能被弱化。这意味着,应用DTG方法能否获得一段时间内风能捕获总量的整体提升,取决于转矩增益系数设定是否恰当。
整体位于下方,从而增大风轮在加速时的不平衡转矩,帮助其更快地逼近最优转速。但是,与此同时,减速时的不平衡转矩减小,减速跟踪性能被弱化。这意味着,应用DTG方法能否获得一段时间内风能捕获总量的整体提升,取决于转矩增益系数设定是否恰当。
1.3 转矩增益系数的优化设定
现有研究表明,最优转矩增益系数会随多个MPPT影响因素的变化而变化[9-10]。这些MPPT影响因素包括随机型改变的机组气动、结构特征( 特性、转动惯量、风轮半径等)及随时间不断变化的湍流特征(平均风速
特性、转动惯量、风轮半径等)及随时间不断变化的湍流特征(平均风速 、湍流标强度
、湍流标强度 、湍流频率
、湍流频率 )[6-10,22]。因此,对于具体机型,需要根据时变的湍流特征,动态优化设定,才能保持较高的风能捕获效率。
)[6-10,22]。因此,对于具体机型,需要根据时变的湍流特征,动态优化设定,才能保持较高的风能捕获效率。
现有研究中,OPM方法[7-8,10,14-16]一般先预设覆盖合理取值范围的湍流特征的多种参数组合,并根据具体风电机组模型,通过遍历方式离线仿真出各个湍流特征参数组合对应的,从而形成综合考虑了风速特征影响的样本数据。然后利用响应面模型[10]、曲线拟合[14]、神经网络[16]等方法建立MPPT影响因素与的映射关系模型,有
在线运行过程中,周期性地获取湍流特征的信息,并根据映射关系计算并更新的设定值。
2 湍流特征指标与 的相关度分析
的相关度分析
本节通过Spearman相关度分析,发现湍流特征刻画指标与最优转矩增益系数的相关度仅为中等相关,探讨了出现该情况的机理及其对OPM方法的影响。
2.1 基于Spearman秩相关系数的相关度分析
现有研究中,转矩曲线调整量的优化已全面考虑了三个湍流特征和机组参数的影响,并且认为在机组参数不变的情况下,最优转矩曲线调整量与平均风速、湍流标准差和湍流频率单调相关[9-10,13-14]。
本文引入Spearman秩相关系数[18-20]评价三个湍流特征与的相关程度。Spearman秩相关系数是一个与分布无关的秩统计参数,用来度量两个变量之间相关性的强弱。其绝对值处于0~1之间,越接近1表明相关性越强。通常,小于0.2被认为是极弱相关或不相关,处于0.2~0.4之间为弱相关,处于0.4~0.6之间表示中等程度相关,处于0.6~0.8之间为强相关,大于0.8表示极强相关[18]。
本文基于NREL CART3风电机组[25],在保持另外两个湍流特征不变的前提下,分别分析了平均风速、湍流强度和湍流频率与的Spearman相关系数,见表1。由表1可知,与三个湍流特征的秩相关系数均为0.5左右,仅达到中等相关级别。
表1 湍流特征与 的Spearman相关系数统计
的Spearman相关系数统计
Tab.1 Spearman correlation coefficient statistics of turbulence characteristics and 

变量Spearman相关系数 平均风速0.533 5 湍流强度0.520 1 湍流频率0.432 5
2.2 多湍流特征对MPPT的耦合作用及其影响
现有研究已经表明,单个湍流特征不仅影响MPPT动态和风能捕获效率,还会改变其他湍流特征影响MPPT动态的敏感程度[17]。这种多湍流特征对风电机组MPPT的影响作用相互耦合导致了单个湍流特征与仅表现为中等相关,而未呈现强相关性。
OPM方法采用数据驱动算法建立最优参数模型,在输入(三个湍流特征指标)、输出变量()仅为中等相关的情况下,仅凭借少量样本难以准确地反映出两者之间的统计规律。因此,为了准确构建出与湍流特征指标之间的复杂非线性映射关系,需要获取到遍历三个特征指标组合对应的大量湍流风速序列,仿真计算出相应的,以生成足够数量的样本数据。这将耗费可观的计算资源与时间成本。
然而,在风电场高度定制化开发与精益化运维的发展趋势下,诸如复杂地形风电场的风电机组差异化控制参数整定、在役机组的优化升级等场景,当前OPM方法基于湍流特征构建式(6)所示模型的做法太过耗时,难以胜任大量风电机组个性化最优参数模型的新建或更新任务。究其原因,湍流特征影响MPPT的耦合作用降低了单个特征指标与的相关程度,模型不得不采用三个特征指标作为输入变量,这就大幅增加了该模型优化所需的样本数量。
3 湍流特征影响MPPT的综合刻画指标
本节通过机理分析提出可将风电机组在OT方法下获得的风能捕获效率作为刻画湍流特征对MPPT综合影响的单值指标,并量化分析其与的相关程度。
3.1 基于可表征湍流特征综合影响的 指标
指标
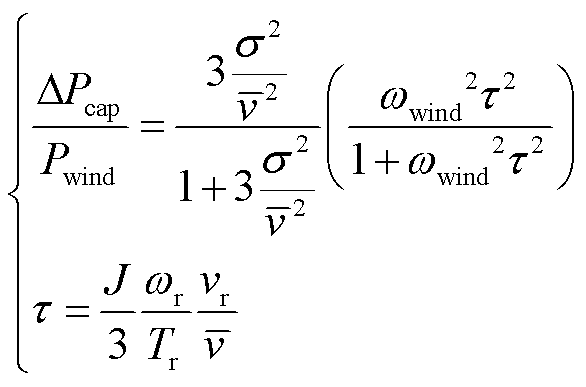
文献[6]基于风电机组线性化模型推导出OT方法下动态风能捕获损失量的近似表达式为
式中, 为风电机组实际捕获功率相对风功率的损失量;
为风电机组实际捕获功率相对风功率的损失量; 为风功率;
为风功率; 为湍流标准差;wr为风电机组额定转速,
为湍流标准差;wr为风电机组额定转速, ;Tr为额定转矩,
;Tr为额定转矩, ;
; 为额定风速。
为额定风速。
根据式(7),OT方法对应的风能捕获效率可近似表示为
式(8)表明,是各MPPT影响因素的函数,可以体现多种因素同时影响风电机组MPPT的综合效应。受此启发,结合对风速时域变化特性影响MPPT动态过程的考虑,本文提出将作为刻画湍流特征对风电机组MPPT综合影响的单值量化指标。
3.2  与的相关度分析
与的相关度分析
本节针对多种风电机组参数,分别计算各种湍流风况下的和,并对两者的相关程度进行量化分析。
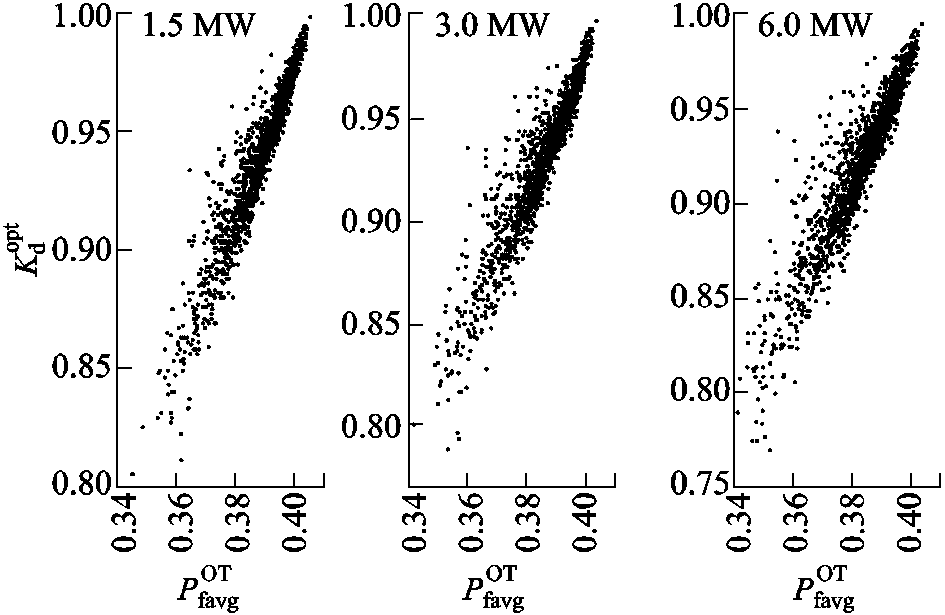
3.2.1 改变风电机组容量
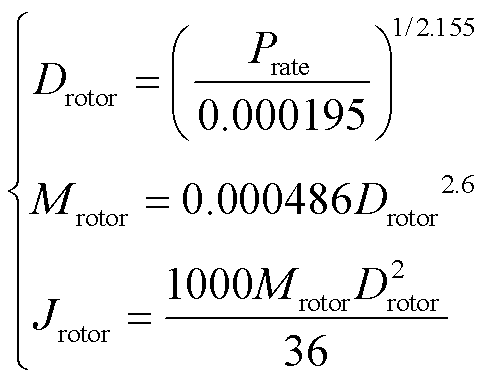
设置相同的 曲线,改变风电机组的容量,即改变了风电机组的半径及转动惯量,统计和相关程度。本文选择1.5 MW、3 MW、6 MW三种常见的容量进行分析。风电机组的风轮直径
曲线,改变风电机组的容量,即改变了风电机组的半径及转动惯量,统计和相关程度。本文选择1.5 MW、3 MW、6 MW三种常见的容量进行分析。风电机组的风轮直径 、风轮质量
、风轮质量 、转动惯量
、转动惯量 与其额定容量
与其额定容量 满足一定的统计关系,见式[9]。
满足一定的统计关系,见式[9]。
根据统计关系式(9)获得的风电机组参数见表2。针对表2给出的不同容量风电机组,图2展示了它们的和之间存在明显的单调变化趋势。经由Spearman相关系数统计,两者的相关系数可达0.95左右,见表3,展现出强相关性。
表2 风电机组参数设置
Tab.2 Parameters setting of wind turbines

风电机组容量/MW风轮半径/m转动惯量/(106 kg·m2) 1.531.792.663 2 3.043.851.169 4 6.060.485.135 0
表3 对应不同风电机组容量的Spearman相关系数
Tab.3 Spearman correlation coefficient corresponding to different wind turbine capacity

风电机组容量/MWSpearman相关系数 1.50.962 7 30.953 5 60.944 0
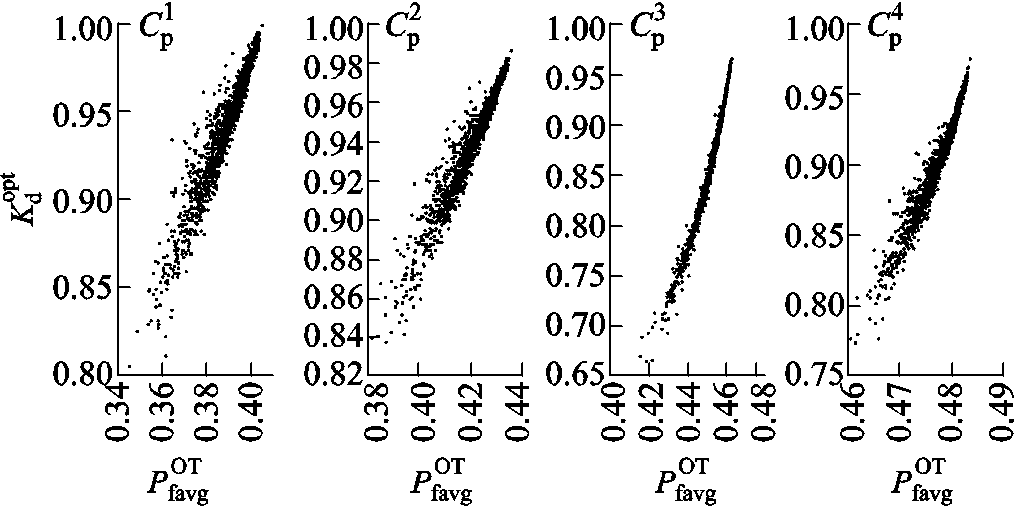
3.2.2 改变 曲线
曲线
固定风电机组容量为1.5 MW不变,根据式(3)设置相同的半径与转动惯量,改变曲线,考察与相关程度的变化。本文采用了4种常见的曲线[25,28-31],风电机组曲线设置见表4。不同Cp特性下和的相关度及Spearman相关系数如图3和表5所示。图3和表5结果同样表明,对于不同气动特性的风电机组,和同样呈现出强相关性。
表4 风电机组 曲线设置
曲线设置
Tab.4  curves setting of wind turbines
curves setting of wind turbines

编号Cp-l曲线 NREL CART3机型 NREL WP 1.5 MW机型
表5 对应不同Cp特性的Spearman相关系数
Tab.5 Spearman correlation coefficient corresponding to different Cp characteristics of wind turbines

编号Spearman相关系数 0.410 98.000.962 7 0.441 26.910.972 4 0.466 15.80.997 0 0.485 57.80.981 1
综上所述,可用于刻画多种因素同时影响风电机组MPPT的综合效应,且与存在强相关性。因此,可将其作为单值刻画指标,构建关于的优化参数模型,有
 (10)
(10)
用式(10)替代以三个湍流特征指标为输入变量的优化模型 。对比上述两种优化模型可见,输入变量由三维减小到一维,在达到相同拟合精度的前提下,对于样本数量的要求大幅减小。
。对比上述两种优化模型可见,输入变量由三维减小到一维,在达到相同拟合精度的前提下,对于样本数量的要求大幅减小。
4 转矩曲线增益系数动态优化方法
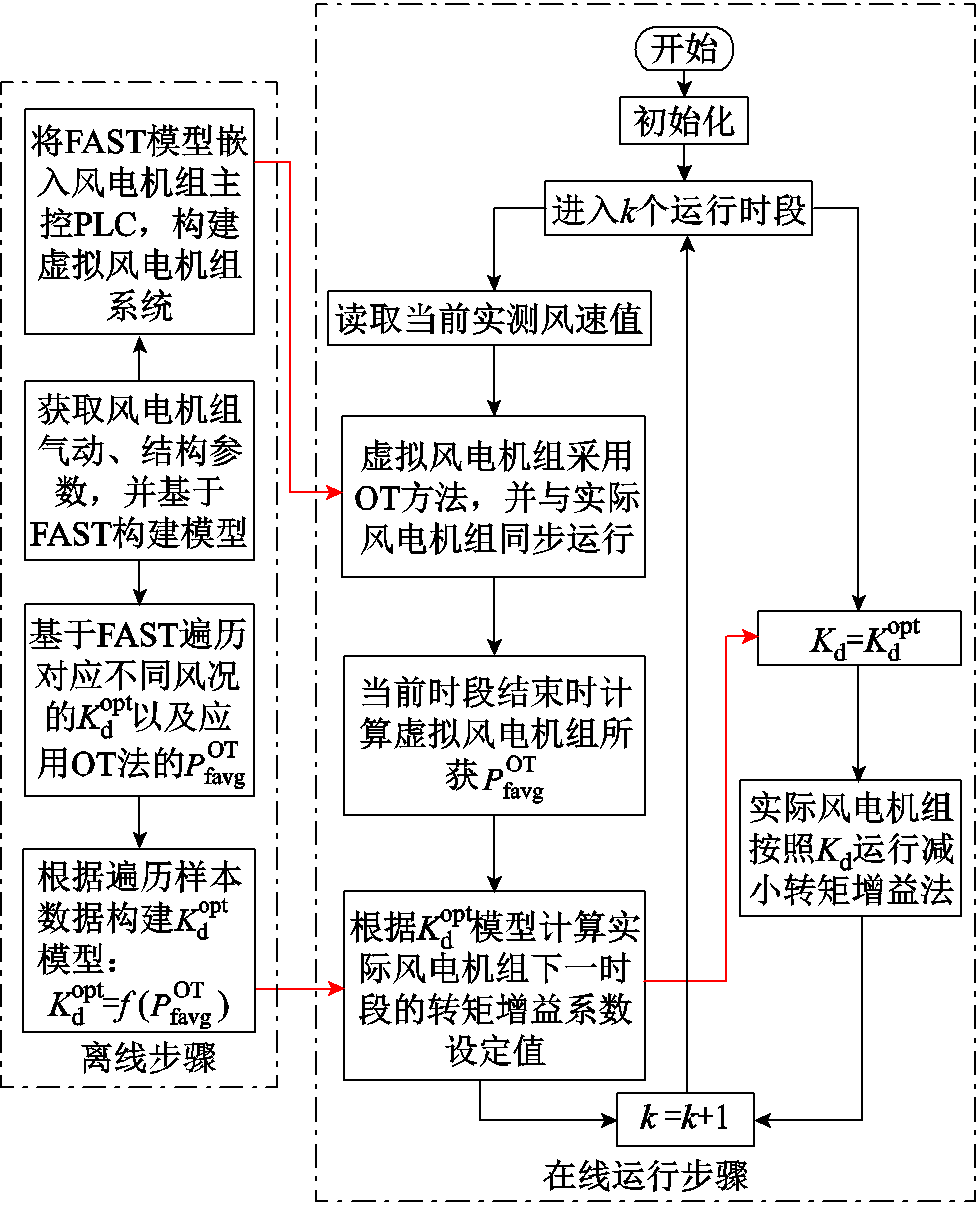
在DTG方法的基础上,本节提出一种转矩曲线增益系数动态优化的MPPT方法。其原理框图如图4所示,分为两个环节:①离线构建由式(10)表示的模型;②运行过程中,周期性地计算,并根据离线构建的模型,动态调整转矩曲线增益系数。
4.1 数字孪生风电机组的引入
需要注意的是,风电机组实际运行的为改进MPPT控制方法,无法直接从运行数据计算出。为此,本文借鉴数字孪生[21-22]的思想,在控制器中嵌入应用OT方法的风电机组数字孪生体,并将其与实际机组同步运行来解决该问题,如图4所示。
完整的数字孪生风电机组应包含由风轮、传动轴系和发电机构成的机电动态过程,以及由发电机、变流器构成的电磁暂态过程[32-33],它们在时间尺度上存在明显差异。文献[34]在对风电机组建模时指出,在研究“慢”子系统动态时,可以忽略“快”子系统的动态影响,认为其响应瞬间完成。而MPPT关注的主要是风轮动态特性,对应机电动态过程。为降低在线运行时的计算复杂度,在构建面向MPPT控制的风电机组数字孪生体时,本文将电磁暂态时间尺度的动态过程解耦并忽略,仅保留与机电动态相关的模型。
为了提高这部分数字孪生体模型的准确性,本文基于开源的专业风电机组仿真软件FAST,构建运行OT方法的风电机组数字孪生体。建模完成后,将风电机组数字孪生体封装成动态链接库(Dynamic Link Library, DLL)文件,并将其植入主控可编程逻辑控制器(Programmable Logic Controller, PLC)中。在线运行过程中,控制虚拟风电机组运行的代码将会同步读取主控系统的风速测量信息,并运行DLL文件,每个运行周期结束时计算,并反馈给主控系统中的MPPT控制模块。MPPT控制模块参考模型的计算结果,设置实际风电机组下一运行周期的转矩增益系数。
需要注意的是,由于风速采样存在一定的间隔,导致风电机组数字孪生体的驱动风速与实际风电机组的存在差异,且采样率越低差异越大,进而影响计算的准确性。为此,本文以较高的20 Hz风速采样率为基准,基于仿真结果,统计了不同风速采样间隔下,数字孪生风电机组计算,以及预估相较于20 Hz风速采样率时的差异平均值及最大值,数字孪生风电机组计算及预估的准确性见表6。
表6 数字孪生风电机组计算 及预估的准确性
及预估的准确性
Tab.6 Accuracy of calculating  and estimating based on digital twin of the wind turbine
and estimating based on digital twin of the wind turbine

采样间隔/s0.11248 差异平均值(%)0.014 60.187 60.391 40.795 91.603 3 差异最大值(%)0.096 91.092 11.393 72.749 55.110 0 差异平均值0.000 60.007 30.014 80.031 30.066 差异最大值0.001 90.027 10.044 90.084 40.170 5
统计结果表明,计算及预估的准确性会随风速采样率的升高而降低。当采样率达到 0.5 Hz时,预估值的最大误差已经接近0.05,达到了不容忽视的程度。因此,使用本文方法要求风速采样率不低于1 Hz。
4.2 模型的离线构建
(1)针对拟应用本文方法的风电机组,获取构建其FAST模型所需的气动、结构参数。
(2)在FAST软件中,根据参数完成应用本文方法的风电机组仿真模型构建。该步骤同时用于数字孪生风电机组的构建。
(3)采用湍流风速模拟方法[35-36],依次改变表征湍流风况的三个参数(平均风速、湍流强度和湍流积分尺度 )[37-38],生成对应于不同特征指标组合的湍流风速序列。其中,的变化范围为4~8 m/s,湍流强度根据A、B、C湍流级别变化,积分尺度变化范围为100~500 m。对应每种风况各生成若干条时长10 min的湍流风速序列。
)[37-38],生成对应于不同特征指标组合的湍流风速序列。其中,的变化范围为4~8 m/s,湍流强度根据A、B、C湍流级别变化,积分尺度变化范围为100~500 m。对应每种风况各生成若干条时长10 min的湍流风速序列。
(4)基于FAST仿真,遍历每条湍流风速序列对应的以及应用OT方法实施MPPT所获。
(5)将遍历得到的结果作为样本数据拟合出和的函数关系为
式中,a0, a1, , an为拟合系数。
, an为拟合系数。
4.3 转矩增益系数的在线优化策略
(1)设定转矩增益系数优化周期为 ,初始化实际风电机组运行的转矩增益系数为
,初始化实际风电机组运行的转矩增益系数为 ,取值一般为0.8~1.0;设定当前时段为
,取值一般为0.8~1.0;设定当前时段为 。
。
(2)读取当前实测风速值,实际风电机组和虚拟风电机组分别采用转矩增益系数动态优化方法及OT法进行MPPT控制,两者同步运行。
(3)记录虚拟风电机组的运行数据,包括转子转速、转子加速度 、发电机电磁转矩等。
、发电机电磁转矩等。
(4)判断第 个时段是否运行结束。若是,则根据记录的运行数据计算出当前时段虚拟风电机组应用OT法对应的,并代入离线构建的式(11)所示模型中计算出;否则,返回执行步骤(2)。
个时段是否运行结束。若是,则根据记录的运行数据计算出当前时段虚拟风电机组应用OT法对应的,并代入离线构建的式(11)所示模型中计算出;否则,返回执行步骤(2)。
(5)将步骤(4)得到的设定为实际风电机组第 个时段的转矩增益系数。
个时段的转矩增益系数。
(6) ,跳转至步骤(2),进入下一个运行时段。
,跳转至步骤(2),进入下一个运行时段。
综上所述,面向风电机组最大功率点跟踪的转矩增益系数动态优化方法的流程如图5所示。
5 仿真验证与分析
5.1 仿真模型及参数
1)风电机组参数
本文采用FAST软件进行仿真验证。风电机组采用NERL开发的CART3风电机组[25],其主要参数见表7。
表7 NERL CART3风电机组主要参数
Tab.7 Specifications of NREL CART3 wind turbine
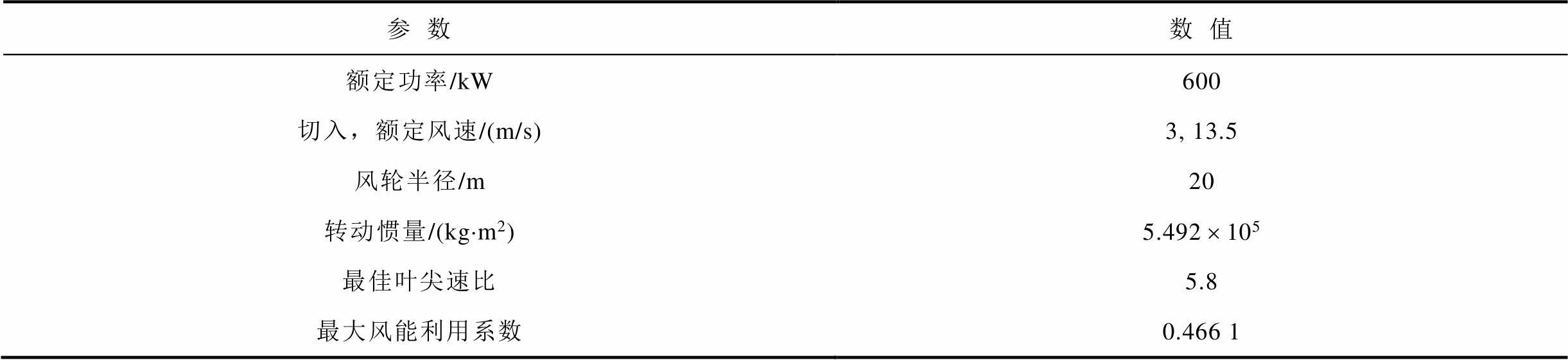
参数数 值 额定功率/kW600 切入,额定风速/(m/s)3, 13.5 风轮半径/m20 转动惯量/(kg×m2)5.492´105 最佳叶尖速比5.8 最大风能利用系数0.466 1
2)长时湍流风速序列的生成
本文从江苏某风电场的测风塔获取了其2018年9月份与10月份的10 min平均风速数据和湍流强度数据。从中截取了连续4 h平均风速处于MPPT区间的时间段,共计136组。湍流积分尺度设为100 m,风功率谱为Kaimal谱[37]。利用Turbsim软件[38]生成了对应的136组时长为4 h的湍流风速序列。
3)MPPT控制方法的参数设置
转矩曲线的参数更新周期均设为10min。自适应转矩控制(Adaptive Torque Control, ATC)方法的参数设置见文献[15]。风速采样率设置为10 Hz。
5.2 CART3风电机组的模型
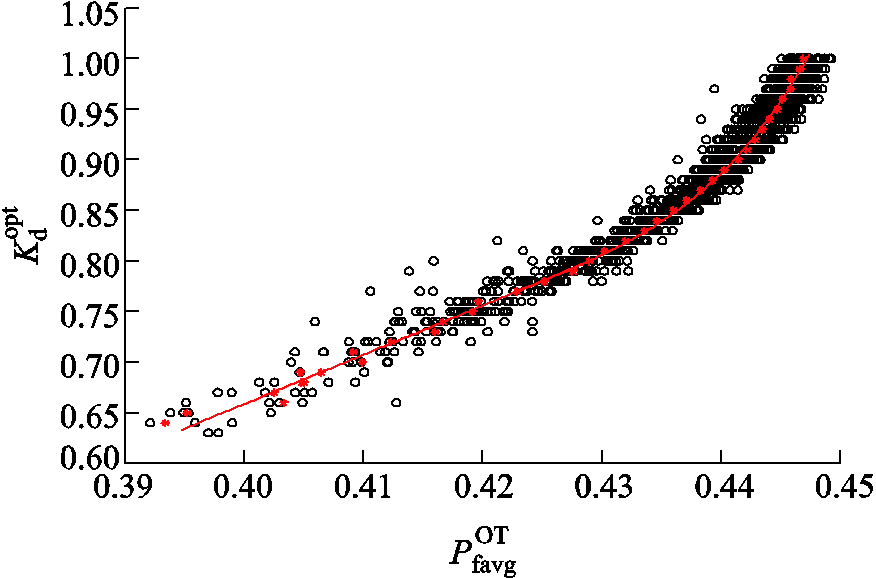
根据4.1节所述步骤,本文将和的变化步长分别设置为1 m/s和50 m,共计135种风况,每种风况各生成10条风速序列。在此基础上仿真获得了不同湍流风速下CART3风电机组的与之间的数值关系。1 350个样本点数据如图6所示。
根据样本点的分布,在 的区间采用4次项函数关系进行拟合,得到
的区间采用4次项函数关系进行拟合,得到
在 的区间,由于线性程度高,采用线性函数关系进行拟合,有
的区间,由于线性程度高,采用线性函数关系进行拟合,有
 (13)
(13)
5.3 不同MPPT方法性能的比较
1)本文方法对于的估计效果
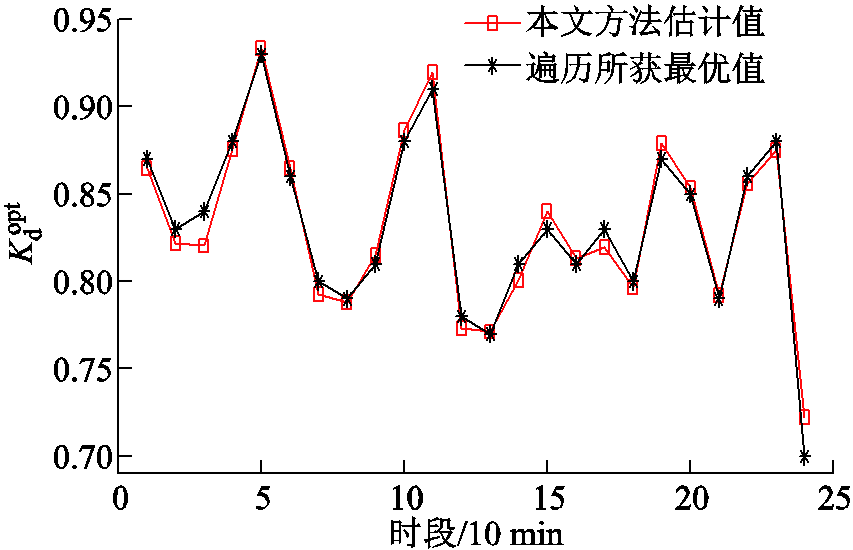
为了检验本文方法对于的估计效果,本文针对一条包含24个10 min时段的4 h长时风速序列,通过本文方法估计出每个时段的 设定值。同时,通过遍历的方式获得了每个时段对应的理论。如图7所示,对比可知,本文方法对于的估计较为准确。
设定值。同时,通过遍历的方式获得了每个时段对应的理论。如图7所示,对比可知,本文方法对于的估计较为准确。
2)数字孪生风电机组的同步运行可行性分析
由于风电机组数字孪生体基于建模精细度较高的FAST构建,实现其与实际风电机组的同步运行对计算能力的要求较高。为了测试风电机组主控系统PLC是否满足同步运算要求,本文基于批量化风电机组产品常用的Beckhoff CX5130型PLC,测试了每运行1 s时长的风电机组数字孪生体DLL文件所耗费的计算时间,结果为75 ms。因此,当前主流主控PLC的计算性能能够支持本文方法的应用。
3)风能捕获效率的比较
针对136组风速序列,分别应用OT方法、ATC方法、文献[10]方法和本文方法进行仿真计算,获得每条风速序列对应的平均风能捕获效率。
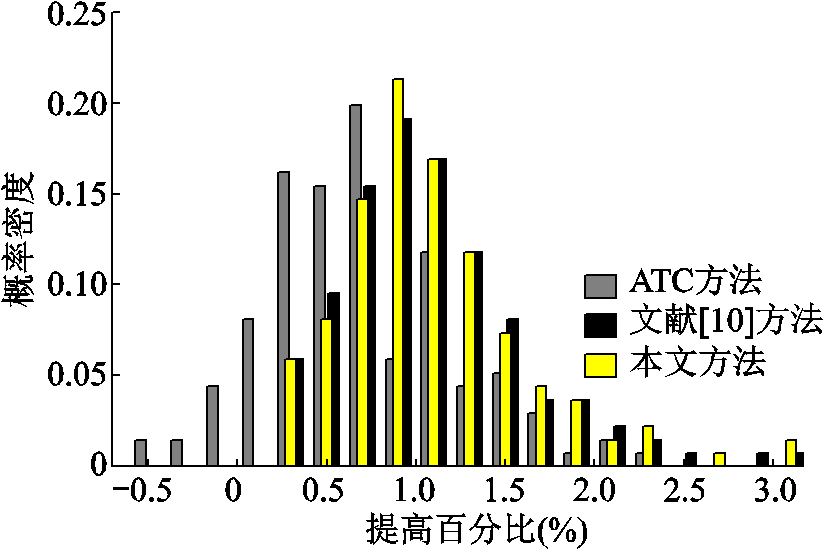
图8所示为本文针对136组算例统计的,不同改进方法所获 相对OT方法提高百分比的概率分布情况。本文方法与文献[10]方法的提高百分比集中于1%左右的区间,而ATC方法大多数处于0.5%的区域。同时,本文统计了不同MPPT方法对应的全部算例的总平均风能捕获效率,不同MPPT方法效率统计结果的比较见表8。
相对OT方法提高百分比的概率分布情况。本文方法与文献[10]方法的提高百分比集中于1%左右的区间,而ATC方法大多数处于0.5%的区域。同时,本文统计了不同MPPT方法对应的全部算例的总平均风能捕获效率,不同MPPT方法效率统计结果的比较见表8。
表8 不同MPPT方法效率统计结果的比较
Tab.8 Comparison of efficiency statistical results corresponding to different MPPT methods

MPPT方法相比较OT方法的提高百分比(%) OT方法0.433 9 ATC方法0.436 50.591 1 文献[10]方法0.438 10.969 5 本文方法0.438 10.975 5
由图8和表8可以看出,本文方法和文献[10]方法性能接近,具有良好的湍流风况适应性,始终保持着较高的风能捕获效率。结合对离线工作量的考虑,本文方法兼具OPM方法效率高、性能稳定,以及自适应类算法部署快的优点。
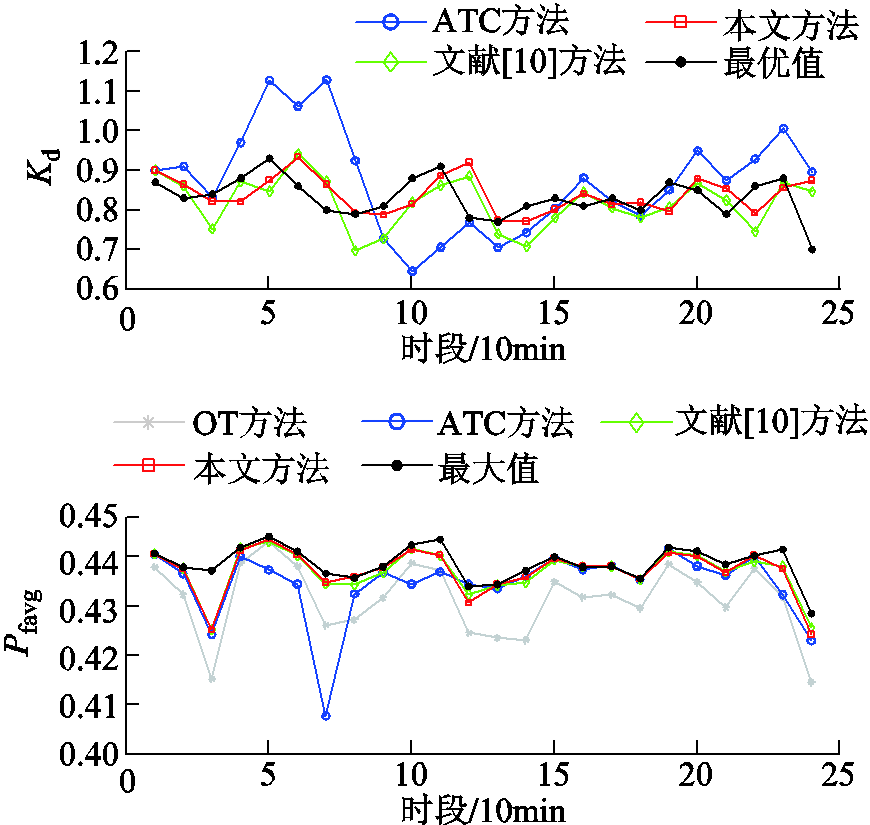
本文从前述136组算例中选择了一组,详细比较了OT方法、ATC方法、文献[10]方法及本文方法的与每10 min时段的变化曲线,如图9所示。图9中同时给出通过遍历仿真获得的及对应的风能捕获效率。各MPPT方法4 h的总体风能捕获效率统计值及对比结果见表9。
由图9及表9可知,面对该风速序列,ATC方法在周期5~7以及周期10、11出现了参数设定显著偏离最优值的严重问题,导致MPPT性能降低,风能捕获效率大幅减小。而本文方法与文献[10]方法表现出对湍流风况变化的良好适应性,始终保持较高的风能捕获效率。不同的是,得益于将建立 与平均风速、湍流强度、湍流频率的三维复杂映射关系转变为了建立与
与平均风速、湍流强度、湍流频率的三维复杂映射关系转变为了建立与 的一维映射关系,本文方法离线工作所占用的时间成本与计算资源远低于文献[10]方法。
的一维映射关系,本文方法离线工作所占用的时间成本与计算资源远低于文献[10]方法。
表9 不同MPPT方法效率的比较
Tab.9 Efficiency comparison among different MPPT methods

MPPT方法相比较OT方法的提高百分比(%) OT方法0.432 1 ATC方法0.434 60.571 文献[10]方法0.437 41.221 本文方法0.437 5 1.239
4)计算量的比较
伴随风电场开发高度定制化与后市场精益运维的发展,改进MPPT控制方法需要具备快速部署能力,即对方法所需要的计算量提出了更高要求。为此,本文对现有OPM方法[10]和本文方法的计算量进行了比较分析。它们的差异主要体现在离线构建模型的计算量和计算时间,见表10。
表10 离线构建 模型所需计算量和计算时间的比较
模型所需计算量和计算时间的比较
Tab.10 Comparison of calculation amount and calculation time required for offline construction of  model
model

参数文献[10]方法本文方法 需要遍历的算例数量/个66 1991 350 单次计算时间/min2525 仿真进程数/个1010 总时长/d112.72.3
本文方法需要完成5.2节所述的1 350条10 min湍流风速序列对应的遍历,而对于 的
的 、
、 、
、 三变量参数变化组合,在达到同等拟合精度的前提下,文献[10]方法所需要遍历的风速序列数量为66 199条。经测算,利用16核工作站(8核Xeon E5-2630×2、32 G内存),遍历1条10 min风速序列对应的需要耗时约25 min。本文同时开启10个FAST进程,总计耗时约2.3天完成了全部风速序列样本的遍历工作。若基于同样的计算负载,复现文献[10]方法预计耗时约112.7天。为了加速该过程,启用了另外两台同样配置的工作站,最终历时40天才完成全部遍历工作。
三变量参数变化组合,在达到同等拟合精度的前提下,文献[10]方法所需要遍历的风速序列数量为66 199条。经测算,利用16核工作站(8核Xeon E5-2630×2、32 G内存),遍历1条10 min风速序列对应的需要耗时约25 min。本文同时开启10个FAST进程,总计耗时约2.3天完成了全部风速序列样本的遍历工作。若基于同样的计算负载,复现文献[10]方法预计耗时约112.7天。为了加速该过程,启用了另外两台同样配置的工作站,最终历时40天才完成全部遍历工作。
6 结论
对于广泛应用的最优转矩法,转矩曲线的参数优化受到湍流风况及机组气动、结构参数等因素的影响,如何在运行过程中根据影响因素的变化动态优化调整转矩曲线成为提升风能捕获的关键所在。本文提出了将最优转矩法对应风能捕获效率作为刻画多个MPPT影响因素综合作用的单值指标,通过将其作为最优转矩增益系数模型的唯一输入变量,大幅简化了构建该优化模型的复杂程度。通过引入数字孪生风电机组,解决了最优转矩法对应风能捕获效率无法直接获得的问题,在此基础上提出了转矩曲线增益动态优化的MPPT控制方法。仿真结果表明,本文方法能够在保证高效捕获风能的同时,大幅降低离线构建最优转矩增益系数模型的计算和时间成本,便于应对商业风电机组的批量化定制与快速部署。
需要注意的是,包括本文方法在内的OPM方法,对模型的准确性要求较高。机组模型参数设置不准确及长期运行后气动、结构参数的变化均会降低此类方法的实施效果。研究基于机组运行数据的模型参数校准方法,适时更新最优转矩增益系数模型及机组数字孪生体是未来需要进一步研究的工作。
参考文献
[1] 许利通, 程明, 魏新迟, 等. 考虑损耗的无刷双馈风力发电系统功率反馈法最大功率点跟踪控制[J]. 电工技术学报, 2020, 35(3): 472-480. Xu Litong, Cheng Ming, Wei Xinchi, et al. Power signal feedback control of maximum power point tracking control for brushless doubly-fed wind power generation system considering loss[J]. Transactions of China Electrotechnical Society, 2020, 35(3): 472-480.
[2] Mousa H H H. State of the art perturb and observe MPPT algorithms based wind energy conversion systems: a technology review[J]. International Journal of Electrical Power & Energy Systems, 2021, 126: 106598.
[3] 陈载宇, 殷明慧, 蔡晨晓, 等. 一种实现风力机MPPT控制的加速最优转矩法[J]. 自动化学报, 2015, 41(12): 2047-2057. Chen Zaiyu, Yin Minghui, Cai Chenxiao, et al. An accelerated optimal torque control of wind turbines for maximum power point tracking[J]. Acta Automatica Sinica, 2015, 41(12): 2047-2057.
[4] 耿华, 杨耕, 周伟松. 考虑风机动态的最大风能捕获策略[J]. 电力自动化设备, 2009, 29(10): 107-111. Geng Hua, Yang Geng, Zhou Weisong. MPPT strategy considering wind turbine dynamics[J]. Electric Power Automation Equipment, 2009, 29(10): 107-111.
[5] 殷明慧, 蒯狄正, 李群, 等. 风机最大功率点跟踪的失效现象[J]. 中国电机工程学报, 2011, 31(18): 40-47. Yin Minghui, Kuai Dizheng, Li Qun, et al. A phenomenon of maximum power point tracking invalidity of wind turbines[J]. Proceedings of the CSEE, 2011, 31(18): 40-47.
[6] Tang Chun, Soong W L, Freere P, et al. Dynamic wind turbine output power reduction under varying wind speed conditions due to inertia[J]. Wind Energy, 2013, 16(4): 561-573.
[7] Johnson K, Fingersh L J, Balas M, et al. Methods for increasing region 2 power capture on a variable speed HAWT[C]//42nd AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, USA, 2004: 350.
[8] 殷明慧, 张小莲, 叶星, 等. 一种基于收缩跟踪区间的改进最大功率点跟踪控制[J]. 中国电机工程学报, 2012, 32(27): 24-31, 178. Yin Minghui, Zhang Xiaolian, Ye Xing, et al. Improved MPPT control based on the reduction of tracking range[J]. Proceedings of the CSEE, 2012, 32(27): 24-31, 178.
[9] 张小莲, 殷明慧, 周连俊, 等. 风电机组最大功率点跟踪控制的影响因素分析[J]. 电力系统自动化, 2013, 37(22): 15-21. Zhang Xiaolian, Yin Minghui, Zhou Lianjun, et al. Analysis on factors affecting performance of MPPT control[J]. Automation of Electric Power Systems, 2013, 37(22): 15-21.
[10] 周连俊, 殷明慧, 陈载宇, 等. 考虑湍流频率因素的风力机最大功率点跟踪控制[J]. 中国电机工程学报, 2016, 36(9): 2381-2388. Zhou Lianjun, Yin Minghui, Chen Zaiyu, et al. Maximum power point tracking control of wind turbines with consideration of turbulence frequency[J]. Proceedings of the CSEE, 2016, 36(9): 2381-2388.
[11] Johnson K E. Adaptive torque control of variable speed wind turbines[R]. Office of Scientific and Technical Information (OSTI), 2004.
[12] 周连俊, 殷明慧, 杨炯明, 等. 考虑变化湍流风速条件的风电机组改进自适应转矩控制[J]. 电力系统自动化, 2021, 45(1): 184-191. Zhou Lianjun, Yin Minghui, Yang Jiongming, et al. Improved adaptive torque control considering varying turbulence conditions for wind turbines[J]. Automation of Electric Power Systems, 2021, 45(1): 184-191.
[13] Zhang Xiaolian, Huang Can, Hao Sipeng, et al. An improved adaptive-torque-gain MPPT control for direct-driven PMSG wind turbines considering wind farm turbulences[J]. Energies, 2016, 9(11): 977.
[14] Zhang Xiaolian. An improved maximum power point tracking method based on decreasing torque gain for large scale wind turbines at low wind sites[J]. Electric Power Systems Research, 2019, 176: 105942.
[15] Yin Minghui, Li Weijie, Chung C Y, et al. Optimal torque control based on effective tracking range for maximum power point tracking of wind turbines under varying wind conditions[J]. IET Renewable Power Generation, 2017, 11(4): 501-510.
[16] 殷明慧, 张小莲, 邹云, 等. 跟踪区间优化的风力机最大功率点跟踪控制[J]. 电网技术, 2014, 38(8): 2180-2185. Yin Minghui, Zhang Xiaolian, Zou Yun, et al. Improved MPPT control of wind turbines based on optimization of tracking range[J]. Power System Technology, 2014, 38(8): 2180-2185.
[17] Zhou Lianjun, Zhang Zhengyang, Yin Minghui, et al. Indirect effects of turbulence frequency on maximum power point tracking of wind turbine[C]//10th International Conference on Advances in Power System Control, Operation & Management (APSCOM 2015), Hong Kong, China, 2015: 1-6.
[18] 程细玉, 程璟. 数理统计[M]. 厦门: 厦门大学出版社, 2016.
[19] 徐佳宁, 倪裕隆, 朱春波. 基于改进支持向量回归的锂电池剩余寿命预测[J]. 电工技术学报, 2021, 36(17): 3693-3704. Xu Jianing, Ni Yulong, Zhu Chunbo. Remaining useful life prediction for lithium-ion batteries based on improved support vector regression[J]. Transactions of China Electrotechnical Society, 2021, 36(17): 3693-3704.
[20] 叶林, 马明顺, 靳晶新, 等. 考虑风电-光伏功率相关性的因子分析-极限学习机聚合方法[J]. 电力系统自动化, 2021, 45(23): 31-40. Ye Lin, Ma Mingshun, Jin Jingxin, et al. Factor analysis-extreme learning machine aggregation method considering correlation of wind power and photovoltaic power[J]. Automation of Electric Power Systems, 2021, 45(23): 31-40.
[21] 何绍民, 杨欢, 王海兵, 等. 电动汽车功率控制单元软件数字化设计研究综述及展望[J]. 电工技术学报, 2021, 36(24): 5101-5114. He Shaomin, Yang Huan, Wang Haibing, et al. Review and prospect of software digital design for electric vehicle power control unit[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5101-5114.
[22] Branlard E, Jonkman J, Dana S, et al. A digital twin based on OpenFAST linearizations for real-time load and fatigue estimation of land-based turbines[J]. Journal of Physics: Conference Series, 2020, 1618(2): 022030.
[23] Jonkman J M, Buhl Jr M L. FAST user’s guide[R]. Golden, Colorado, USA: National Renewable Energy Laboratory, 2005.
[24] 陈载宇, 沈春, 殷明慧, 等. 面向AGC的变速变桨风电机组有功功率控制策略[J]. 电力工程技术, 2017, 36(1): 9-14. Chen Zaiyu, Shen Chun, Yin Minghui, et al. Review of active power control strategy for variable-speed variable-pitch wind turbine participating in AGC[J]. Electric Power Engineering Technology, 2017, 36(1): 9-14.
[25] Darrow P J. Wind Turbine Control Design to Reduce Capital Costs: 7 January 2009 - 31 August 2009[R]. Office of Scientific and Technical Information (OSTI), 2010.
[26] Chen Zaiyu, Yin Minghui, Zou Yun, et al. Maximum wind energy extraction for variable speed wind turbines with slow dynamic behavior[J]. IEEE Transactions on Power Systems, 2017, 32(4): 3321-3322.
[27] Huang Can, Li Fangxing, Jin Zhiqiang. Maximum power point tracking strategy for large-scale wind generation systems considering wind turbine dynamics[J]. IEEE Transactions on Industrial Electronics, 2015, 62(4): 2530-2539..
[28] 姚琦, 胡阳, 柳玉, 等. 考虑载荷抑制的风电场分布式自动发电控制[J]. 电工技术学报, 2022, 37(3): 697-706. Yao Qi, Hu Yang, Liu Yu, et al. Distributed automatic generation control of wind farm considering load suppression[J]. Transactions of China Electrotechnical Society, 2022, 37(3): 697-706.
[29] Xi Renqiang, et al. A semi-analytical model of aerodynamic damping for horizontal axis wind turbines and its applications[J]. Ocean Engineering, 2020, 214: 107861.
[30] Pucci M, Cirrincione M. Neural MPPT control of wind generators with induction machines without speed sensors[J]. IEEE Transactions on Industrial Electronics, 2011, 58(1): 37-47.
[31] Hong C M , Chen C H , Tu C S. Maximum power point tracking-based control algorithm for PMSG wind generation system without mechanical sensors[J]. Energy Conversion and Management, 2013, 69: 58-67.
[32] 颜湘武, 王德胜, 杨琳琳, 等. 直驱风机惯量支撑与一次调频协调控制策略[J]. 电工技术学报, 2021, 36(15): 3282-3292. Yan Xiangwu, Wang Desheng, Yang Linlin, et al. Coordinated control strategy of inertia support and primary frequency regulation of PMSG[J]. Transactions of China Electrotechnical Society, 2021, 36(15): 3282-3292.
[33] Iqbal A, Singh G K. PSO based controlled six-phase grid connected induction generator for wind energy generation[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(1): 41-49.
[34] 耿华, 杨耕. 变速变桨距风电系统的功率水平控制[J]. 中国电机工程学报, 2008, 28(25): 130-137. Geng Hua, Yang Geng. Output power level control of variable-speed variable-pitch wind generators[J]. Proceedings of the CSEE, 2008, 28(25): 130-137.
[35] 赵云龙, 翁兰溪, 黄文超, 等. 基于山脊地形台风风场的铁塔风振系数研究[J]. 电气技术, 2021, 22(3): 38-43. Zhao Yunlong, Weng Lanxi, Huang Wenchao, et al. Research on wind-vibration coefficient of iron tower based on typhoon wind field of ridge terrain[J]. Electrical Engineering, 2021, 22(3): 38-43.
[36] Nichita C, Luca D, Dakyo B, et al. Large band simulation of the wind speed for real time wind turbine simulators[J]. IEEE Transactions on Energy Conversion, 2002, 17(4): 523-529.
[37] CSA C61400-1 Wind turbines—Part 1: Design requi-rements[S]. CSA, 2014.
[38] Xie Kaigui, Jiang Zefu, Li Wenyuan. Effect of wind speed on wind turbine power converter reliability[J]. IEEE Transactions on Energy Conversion, 2012, 27(1): 96-104.
Torque Curve Gain Dynamic Optimization for Maximum Power Point Tracking of Wind Turbines
Zhou Lianjun1 Li Qun2 Yin Minghui1 Yang Jiongming3 Zou Yun1
(1. School of Automation Nanjing University of Science and Technology Nanjing 210094 China 2. Research Institute State Grid Jiangsu Electric Power Co. Ltd Nanjing 211103 China 3. Jiangsu Goldwind Science & Technology Co. Ltd Yancheng 224100 China)
Abstract The optimal torque (OT) method is a common method to realize the maximum power point tracking (MPPT) of wind turbines. By modifying the torque curve gain, the wind energy capture efficiency of wind turbine operating in MPPT mode under turbulent conditions can be improved. However, there is a precondition that the torque curve gain should be reasonably designed comprehensively considering the influence of turbulence characteristics.
The existing researches construct the optimal parameter model describing the relationship between optimal torque curve gain and turbulence characteristics offline, then, based on the model, realize the dynamic optimization of torque curve gain according to the time-varying turbulence characteristics online. Nevertheless, because there is a complex three-dimensional nonlinear function relation between the optimal torque curve gain and turbulence characteristic indexes including average wind speed, turbulence intensity and turbulence frequency, it is necessary to traverse search the corresponding optimal torque gain based on a large number of turbulent wind speed series with different characteristics, so as to obtain sufficient samples for constructing the optimal parameter model. The corresponding huge amount of dynamic simulation calculation is very time-consuming and difficult to be applied in batch engineering.
It was found in this paper that the wind energy capture efficiency corresponding to the OT method () can reflect the comprehensive effect of multiple factors affecting the MPPT of wind turbine. And the results based on Spearman rank correlation analysis show that the correlation coefficient between and the optimal torque curve gain is greater than 0.9, which is a very strong correlation. By comparison, the Spearman correlation coefficient between optimal torque curve gain and three turbulence characteristics is about 0.5, indicates that the degree of correlation is only moderate. Therefore, it was proposed to use as a single-valued characterization index to construct a quantitative relationship with the optimal torque gain, which can reduce the dimension of the optimal parameter model based on three variables to a single variable. On this basis, an MPPT control method was proposed to optimize the torque curve gain online according to and the optimal parameter model. Since the actual wind turbine adopts an improved MPPT control method with dynamic adjustment of torque curve gain, this paper constructed a digital twin of wind turbine using the OT method in programmable logic controller (PLC), and made it run synchronously with the actual wind turbine to realize the acquisition of .
Simulation results based on FAST softwaredeveloped by National Renewable Energy Laboratory show that, the proposed method reduces the time required to construct the optimal parameter model from 112.7 days to 2.3 days, not only retains the comprehensive consideration of turbulence characteristics so as to maintain high wind energy capture efficiency, but also significantly reduces the computing capacity demand and time cost, which is convenient for batch customization and rapid deployment. At the same time, based on the Beckhoff CX5130 PLC commonly used by the current batch wind turbine products, the engineering feasibility of synchronous operation of the wind turbine digital twin and actual wind turbine was tested and verified.
It should be noted that, when the wind turbine model parameters used to construct the optimal parameter model and the wind turbine digital twin do not match the actual wind turbineparameters, the application effect of this method will be decreased. Therefore, how to calibrate the wind turbine model parameters based on operating data, and update the optimal parameter model and wind turbine digital twin in a timely manner remains to be further studied.
keywords:Wind power, maximum power point tracking (MPPT), torque curve gain, digital twin
国家自然科学基金项目(51977111,61773214)、江苏省青蓝工程和江苏省科技成果转化专项资金项目(BA2019045)和江苏省卓越博士后计划资助。
收稿日期 2022-04-24
DOI:10.19595/j.cnki.1000-6753.tces.220650
中图分类号:TM614
作者简介
周连俊 男,1988年生,博士,研究方向为风力发电系统的运行与优化、风电试验技术。E-mail:lspj324@163.com
殷明慧 男,1978年生,博士,教授,研究方向为风力发电系统控制与友好并网、风电机组动模实验技术。E-mail:ymhui@vip.163.com(通信作者)
改稿日期 2022-06-16
(编辑 赫蕾)
 (1)
(1)
 (3)
(3)
 (5)
(5)
 (7)
(7)
 (8)
(8)
 (9)
(9)
 characteristics)
characteristics)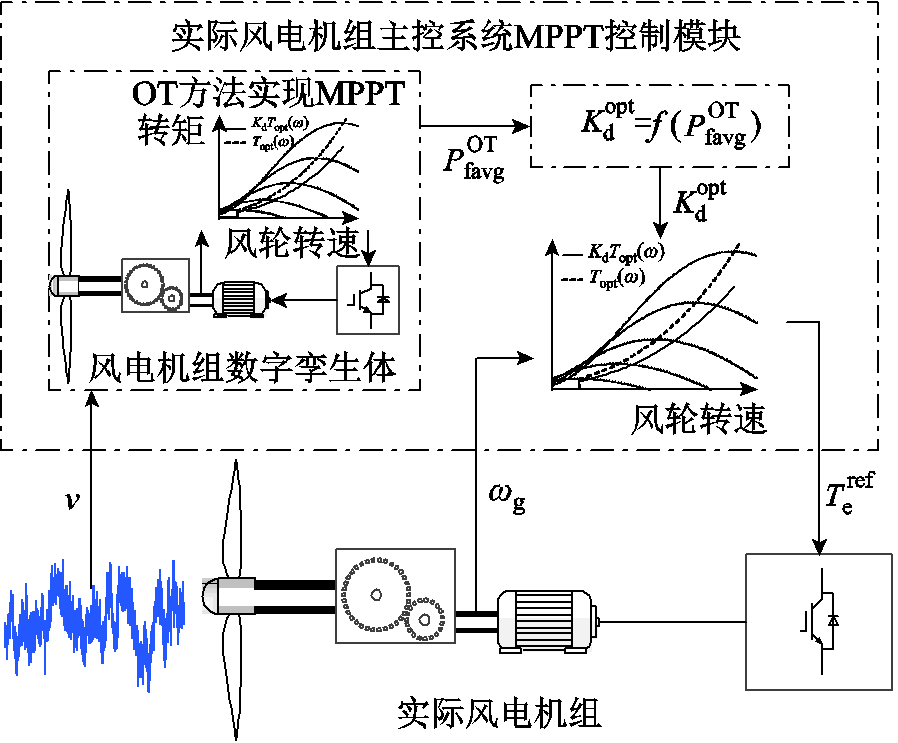
 (11)
(11)
 (12)
(12)
 与
与