图1 超磁致伸缩Ⅳ型弯张换能器基本结构
Fig.1 Basic structure of giant magnetostrictive class Ⅳ flextensional transducer
摘要 超磁致伸缩Ⅳ型弯张换能器是实现大功率低频水下声波发射的有效途径,在水下远距离探测、水声通信等领域具有广阔的应用前景。该文提出一种综合考虑材料电磁参数极限、空化边界条件以及最大主应力边界条件的大功率低频超磁致伸缩Ⅳ型弯张电声换能器优化设计方法。首先,根据超磁致伸缩材料的电磁参数极限确定振子棒材数量以及磁回路结构;然后,以频率、声源级为优化目标,机械壳体主要结构参数作为优化变量,结合有限元仿真构建基于Box-Behnken法的响应面模型,并把空化边界条件以及最大主应力边界条件作为优化方案的判据,最终得到优化的壳体结构参数;最后,基于优化设计方案,研制了一款超磁致伸缩Ⅳ型弯张换能器样机,并搭建了湖试实验平台。实验测试结果表明,在40 m水深下,研制的换能器样机谐振频率为480 Hz,最大声源级达到206 dB,验证了设计方法的可行性与准确性。
关键词:磁致伸缩 弯张换能器 优化设计 空化边界 应力极限
超磁致伸缩Ⅳ型弯张换能器在低频、大功率、小尺寸等方面具有独特的优势,是实现大功率低频水下声波发射的有效途径,因此该类换能器在水下远距离探测、水声通信等领域具有广阔的应用前 景[1-3]。然而,超磁致伸缩材料(Terfenol-D)的电磁参数极限、换能器壳体的空化边界以及极限应力边界是超磁致伸缩Ⅳ型弯张电声换能器在目标深度下提升辐射声功率的重要限制条件。
一方面,受超磁致伸缩材料特性的影响,当交流激励磁场大于偏置磁场时,换能器将输出倍频非线性声波,导致输出功率难以提高[4];另一方面,当换能器表面声压增加到超过工作水深下的空化阈值时,将产生空化现象,导致输出波形失真,换能器的辐射阻抗减小,电声效率降低[5]。此外,换能器的壳体既需要承受静水压力,还需要为棒材提供合适的预应力,若设计不当,壳体的最大主应力将超过屈服应力极限,导致壳体在振动过程中无法恢复初始状态,产生永久变形[6]。因此,本文在换能器的设计过程中将充分考虑超磁致伸缩材料的电磁参数极限、空化阈值以及极限应力边界条件。
当前大量文献将波动理论法和等效电路法应用于结构较简单的纵振式电声换能器中,取得了良好的分析与设计效果[7-11]。然而,由于弯张换能器的机械结构复杂,以上方法难以对其进行准确建模分析。通过以上两种方法获得的电路模型难以对磁路结构的有效性进行计算与验证,也无法对壳体的应力分布情况进行分析。随着数值计算软件的发展,研究人员逐渐倾向于基于有限元仿真的弯张换能器设计方法[12-13]。蓝宇等采用有限元法对Ⅳ型弯张换能器进行了应力分析[14]。翁玲等采用有限元方法对磁致伸缩换能器的磁路进行了分析与设计[15-17]。大量研究学者采用有限元方法设计了低频电声换能器,如李宽等设计的稀土Ⅳ型弯张换能器水中谐振频率为370 Hz,最大声源级为196 dB[18];莫喜平团队设计了800 Hz的双壳嵌套式鱼唇弯张换能器[19];K. P. B. Moosad等在有限元的辅助下设计了指向性压电Ⅳ型弯张换能器[20]。然而,影响弯张换能器输出性能的参量众多,如何快速得到各参量与输出频率及声源级之间的关系,进而得到设计方案的问题一直未得到解决。响应面法是一种经典的、常用的数学建模优化和综合实验设计方法,可在少量实验次数的情况下准确分析设计变量之间的相互作用,目前已被广泛应用于电机以及变压器的设计过程中,并取得了良好的设计效果[21-24]。若将有限元设计方法与响应面模型法相结合进行换能器的设计,将明显减少换能器制作与实验的成本,在合理的数据范围内得到符合要求的设计方案。因此,本文创新性地将有限元设计方法与响应曲面法相结合,用于大功率低频换能器的设计。
本文将有限元设计方法与响应曲面法相结合,提出了一种综合考虑电磁-机声多边界条件的大功率低频超磁致伸缩Ⅳ型弯张电声换能器优化设计方法。首先,介绍了换能器的工作原理与设计流程;然后,对棒材的数量以及磁回路结构进行了优化设计;接着,重点结合有限元多场耦合仿真构建了以频率、声源级为设计目标,机械壳体主要结构参数作为优化变量的Box-Behnken法响应面模型,得到优化设计方案;最后,研制了一款超磁致伸缩Ⅳ型弯张换能器样机,并搭建了湖试实验平台,验证了本文所提设计方法的合理性。
本文所研究的超磁致伸缩Ⅳ型弯张电声换能器基本结构如图1所示,采用空气背衬式结构,主要由椭圆壳体、超磁致伸缩棒材、永磁体、磁轭等部件构成。当线圈通入激励电流时,在棒材内部产生交变磁场。由于磁致伸缩效应,棒材在椭圆壳体的长轴方向伸缩振动,在壳体的“杠杆作用”下,长轴方向的伸缩振动在短轴方向被放大,再通过外部介质的传递向外发射声波。
图1 超磁致伸缩Ⅳ型弯张换能器基本结构
Fig.1 Basic structure of giant magnetostrictive class Ⅳ flextensional transducer
为避免“倍频效应”,采用永磁体提供棒材所需的偏置磁场。椭圆外壳提供棒材所需预应力,一方面使棒材工作在线性工作区间;另一方面使棒材在大功率的驱动下仍能承受压应力,以防其受剪切应力或从壳体脱落从而导致损坏。
本文提出的超磁致伸缩Ⅳ型弯张换能器的设计流程如图2所示,主要包括:考虑电磁边界的棒材数量的计算与磁回路的设计、考虑机声边界的空化阈值面积计算与壳体极限应力分析、壳体结构参数设计等步骤,涉及电-磁-机-声多物理场的耦合。在确定目标深度h0、目标频率f0以及目标声源级(Sound Level, SL)后,首先依据超磁致伸缩材料的电极限确定棒材的尺寸与数量,设计磁回路结构。然后,依据磁回路结构、空化阈值面积确定壳体结构参数的选择范围,并以频率、声源级为优化目标,结构参数作为优化变量,结合有限元仿真模型构建Box-Behnken法响应面模型。当频率在目标频率的5 %范围内时,声源级大于目标声源级,且最大主应力未超过屈服应力极限,此时换能器结构参数满足设计要求。
图2 换能器设计流程
Fig.2 The proposed tranducer design process
本文设计的超磁致伸缩Ⅳ型弯张换能器的目标工作深度为40 m,目标频率为480 Hz,目标声源级大于206 dB。
本文所选用的超磁致伸缩材料的磁致伸缩特性经测试如图3所示,综合考虑线性区的应变大小与换能器的驱动效率,本文选用24 MPa作为超磁致伸缩棒材工作时的预应力,此时线性段最大激励磁场强度Hmax约为42 kA/m。在该线性范围内,材料的极限电磁能量可表示为
 (1)
(1)
图3 超磁致伸缩材料磁致伸缩特性曲线
Fig.3 Magnetostrictive properties of Terfenol-D
此时换能器的输出声功率Wa为
 (2)
(2)
式中, 为电声转换效率,经验值为35 %;
为电声转换效率,经验值为35 %; 为角频率;Q为机械品质因数,经验值为4;k33为材料的机电转化系数,经验值为0.7;V为所需材料的体积;
为角频率;Q为机械品质因数,经验值为4;k33为材料的机电转化系数,经验值为0.7;V为所需材料的体积; 为材料磁导率,经测试约为5。
为材料磁导率,经测试约为5。
电声换能器的辐射声源级SL与辐射声功率Wa满足
 (3)
(3)
式中,DI为方向性指数。Ⅳ型弯张换能器的最大尺寸一般远小于波长,近似为全指向性声源,即DI=0。由式(1)~式(3)可得所需超磁致伸缩棒材体积与目标声源级的关系曲线,如图4所示。随着声源级的增加,所需的棒材体积呈指数形式增长;随着频率的降低,所需的棒材的体积亦呈指数倍增长。考虑到声源级需大于206 dB并留有一定的裕度,本文经计算后选用8根直径为35 mm、长度为55 mm的超磁致伸缩棒材作为激励振子。
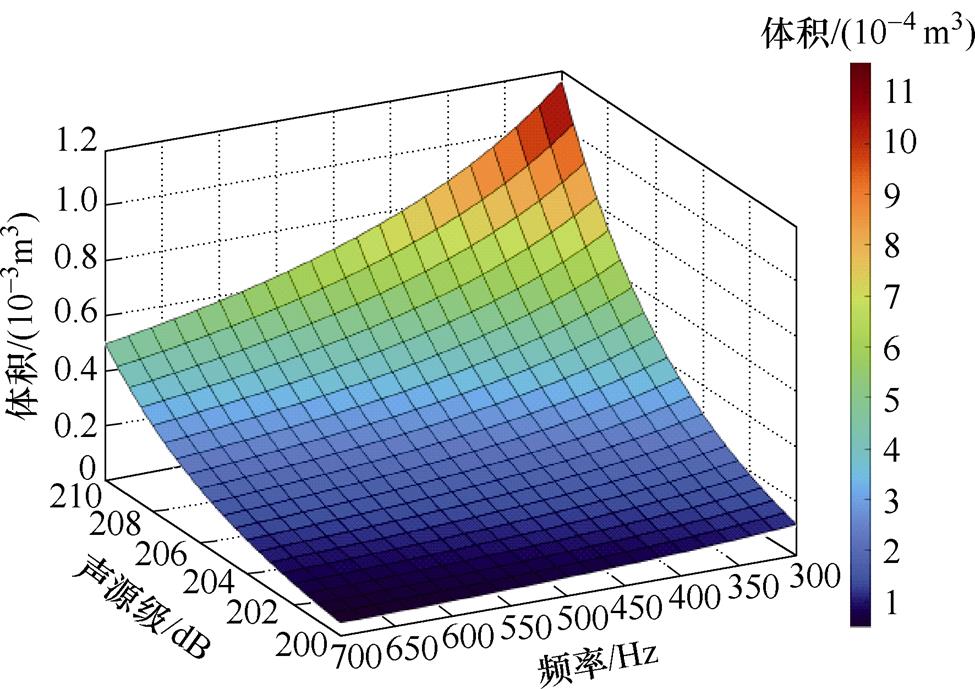
图4 超磁致伸缩棒材体积与声源级的关系曲线
Fig.4 The relationship between volume of giant magnetostrictive bar and sound source level
为提高电声换能器的电磁能量转换效率,设计如图5a所示磁回路结构,采用高磁导率软铁材料作为导磁底座,由钐钴永磁体为超磁致伸缩棒材提供偏置磁场,并将8根棒材分为两组构成“口”字型回路以减少漏磁。随着频率的增加,棒材的趋肤深度越小,受涡流的影响越明显,驱动效率越低[25]。因此,为减小涡流效应带来的电磁损耗,按照图5b所示切割方式对棒材进行切割。
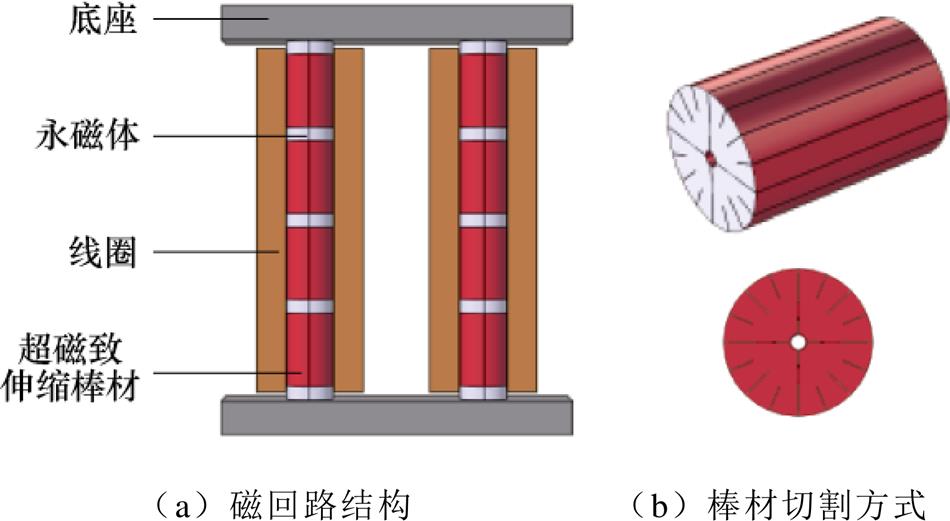
图5 磁回路结构与棒材切割方式示意图
Fig.5 Magnetic loop structure and bar cutting mode
图6为棒材切割前后中心横截面上激励磁场分布情况对比。表1为棒材切割前后中心横截面上沿半径的磁通密度的数值对比情况。在相同的安匝数的情况下,切割前,由于涡流损耗严重,棒材中心部分的磁通密度约减小至最大值的1/2;而切割后,以机械壳体主要结棒材内部的磁通密度的均匀性显著提高,平均值提高约22 %,不均匀性降低了约32 %。电磁转换效率显著提高,有助于充分发挥棒材的能力。
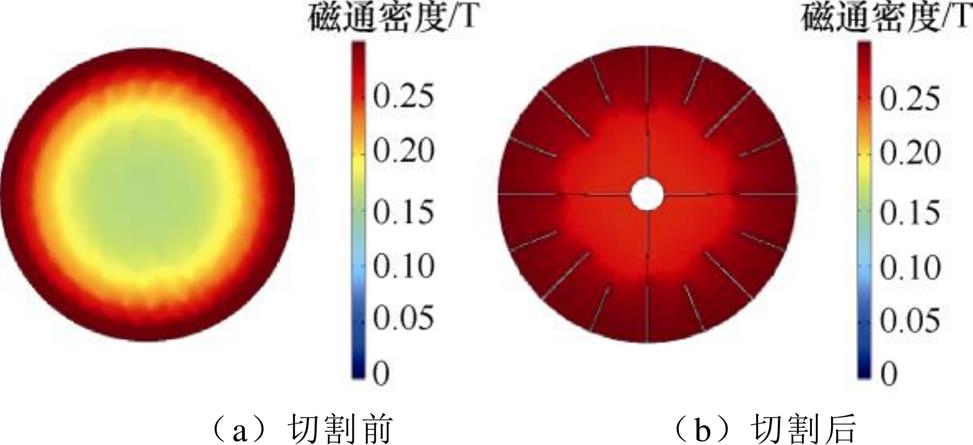
图6 棒材切割前后激励磁场分布情况对比
Fig.6 Comparison of excitation magnetic field distribution before and after bar cutting
表1 棒材切割前后磁通密度对比
Tab.1 Comparison of magnetic flux density before and after bar cutting

切割情况最大值/T最小值/T平均值/T不均匀性(%) 切割前0.310.160.2148.38 切割后0.300.250.2716.67
对于发射换能器而言,在水深hw时可允许的最大的连续声功率Wa为
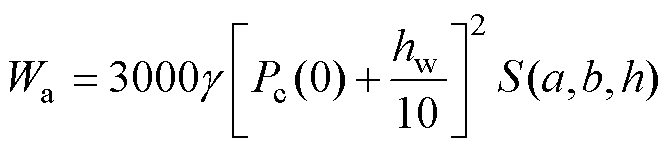 (4)
(4)
式中, 为常数,对于圆形活塞、平面或半球型换能器,的值在0.3~0.6之间,本文取0.3;Pc(0)为换能器表面的空化阈值声压,在低频下其值为1;hw为目标水深;S为换能器辐射表面积,该值为换能器壳体半长轴长度a、半短轴长度b以及壳体高度h的函数[26]。
为常数,对于圆形活塞、平面或半球型换能器,的值在0.3~0.6之间,本文取0.3;Pc(0)为换能器表面的空化阈值声压,在低频下其值为1;hw为目标水深;S为换能器辐射表面积,该值为换能器壳体半长轴长度a、半短轴长度b以及壳体高度h的函数[26]。
结合式(3)与式(4)可得工作深度、声源级与空化阈值面积的对应关系,如图7所示。在同一深度下,随着目标声源级的增加,空化阈值辐射表面积呈指数形式增长,此时换能器的尺寸将急剧增大。考虑到不同水质情况对该理论值的影响并保留一定设计裕度,在目标深度为40 m的情况下,本文要求换能器的辐射面积大于208 dB时所对应的空化阈值面积为0.23 m2。
根据换能器结构的对称性,按照表2所示的壳体结构参数建立换能器壳体的三维1/8模型进行求解计算,模型及分布云图如图8所示。其中壳体材料采用硬铝合金,屈服应力极限为420 MPa。底座材料为软铁。
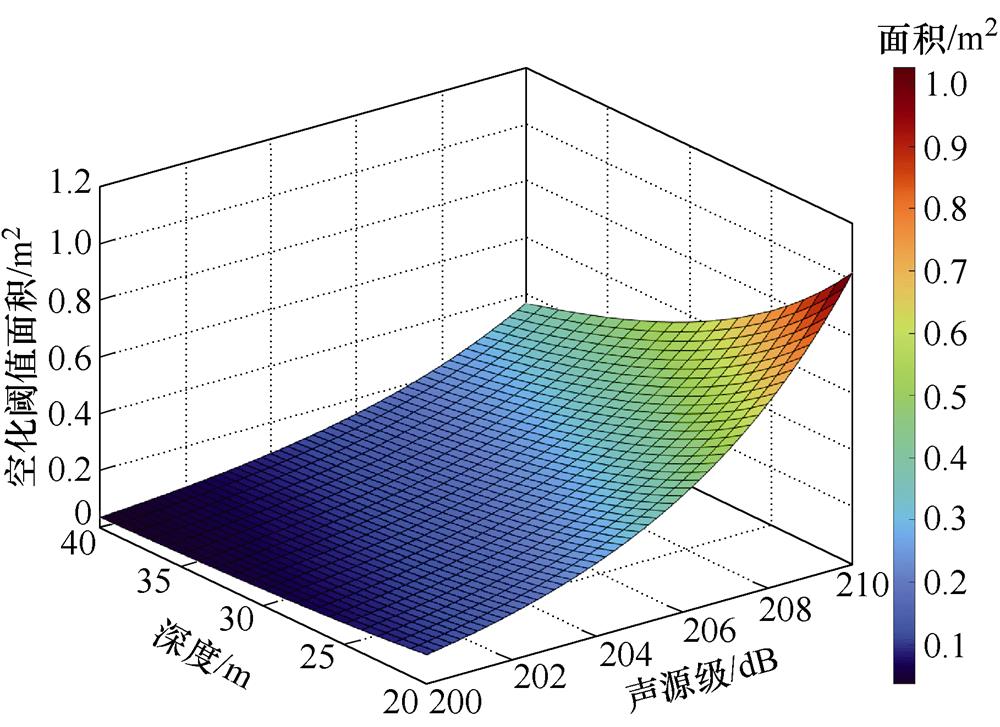
图7 工作深度、声源级与空化阈值面积的关系
Fig.7 The relationship among operating depth, sound source level and cavitation threshold area
表2 换能器结构参数
Tab.2 Value transducer structure parameters (单位: mm)
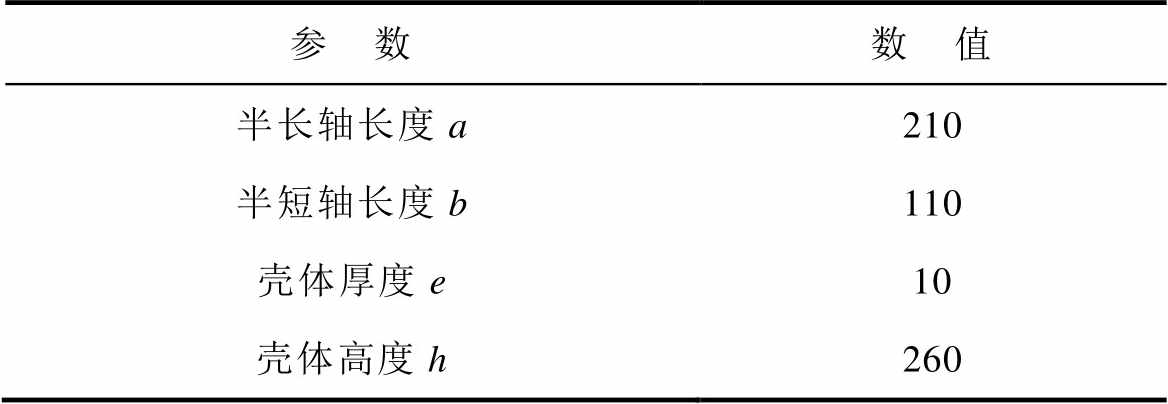
参 数数 值 半长轴长度a210 半短轴长度b110 壳体厚度e10 壳体高度h260
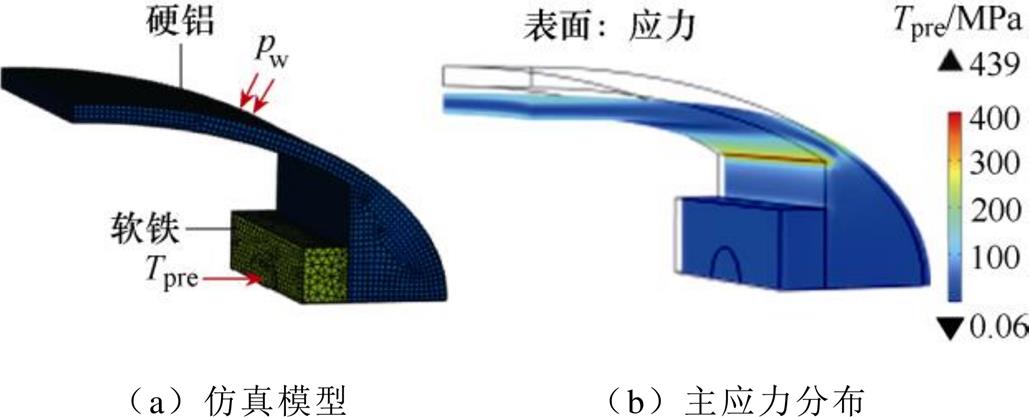
图8 应力仿真模型与分布云图
Fig.8 Schematic diagram of load application
力学仿真的设置如下:
(1)在振子单元与底座接触的面,依据牛顿第二定律,施加所需预应力的反作用力Tpre,如图8a中间箭头所示,其大小等于超磁致伸缩棒材所需的合适的预应力。在本文中,Tpre=24 MPa。
(2)在壳体表面施加均匀的静水压力pw,如图8a中上部箭头所示。
换能器壳体表面主应力分布情况如图8b所示。端部与壳体的过渡位置最大,短轴形变最大位置的应力次之。在不采取任何措施的情况下,此时壳体表面应力最大值已超过壳体材料的屈服应力极限,从而导致壳体易产生塑性变形,无法正常工作。为避免端部与壳体的过渡位置出现的应力集中现象,本文通过倒圆角的方式对该部分进行优化。图9展示了当圆角半径为30 mm时,壳体表面最大主应力与壳体高度及壳体厚度的关系。由此可见,随着壳体厚度的减小,最大主应力急剧上升。随着壳体高度的增加,最大主应力减小,并逐渐趋于平缓。由此可见,壳体的可靠性与壳体的结构参数紧密相关。增加厚度或高度均可提高换能器的耐压可靠性。
图9 最大主应力与壳体高度及壳体厚度的关系
Fig.9 The relationship among maximum principal stress, shell height and shell thickness
壳体的长轴长度必须大于磁路结构的最大长度且留有足够的端部厚度用于磁路与壳体间的过渡。本文固定壳体的半长轴长度a=210 mm。壳体的半短轴长度b与壳体高度h必须一方面使壳体能够给磁路结构提供足够的空间;另一方面使壳体的辐射面积大于空化阈值辐射面积。本文壳体半短轴的取值范围为100~120 mm,壳体高度的取值范围为200~320 mm。壳体厚度越薄,机械强度越差,壳体厚度越厚,壳体的等效刚度会提升,相同棒材下的体积位移会减少,降低了辐射声功率。因此,本文的壳体厚度的取值范围为8~12 mm。由此可得本文的约束条件为
 (5)
(5)
式中, 为壳体表面最大主应力。
为壳体表面最大主应力。
本文根据三水平三因素实验设计原则,建立了基于Box-Behnken法的正交实验矩阵,见表3。通过有限元仿真得到了关于半短轴b、壳体厚度e以及壳体高度h的频率及声源级,并据此建立表面响应模型。从表3可以看出,共需计算17次,其中中心点重复4次。相比传统的穷举法,该方法大大减少了制作换能器的时间成本与实验成本。
表3 正交实验矩阵及有限元仿真结果
Tab.3 Orthogonal experimental matrix and FEM results

参数水平值优化目标 b/mme/mmh/mmf/HzSL 111010260472208.71 211012200570209.23 311012320476208.00 411010260472208.71 510010200492208.54 611010260472208.71 711010260472208.71 81008260400207.97 91208260456209.00 1010012260488207.93 1112012260540209.55 121108200476208.77 1312010320458208.92 1412010200554209.74 1511010260472208.71 1610010320434208.18 171108320394208.10
依据表3实验结果的响应值,对数据进行多元二次拟合,即可得到频率与声源级的编码后的响应面数学模型。
频率f的拟合回归方程为
 (6)
(6)
声源级SL的拟合回归方程为
 (7)
(7)
频率二次多项式模型的方差分析见表4,频率回归模型的P值小于0.000 1,表明回归模型高度显著。半短轴b、壳体厚度e以及壳体高度h三个实验因素对频率f都有极显著的影响,且影响从大到小依次为壳体厚度e、壳体高度h、壳体短轴b(或长短轴比)。
表4 频率二次多项式模型的方差分析
Tab.4 ANOVA of quadratic polynomial model for f

方差来源均方自由度二次方和P值 模型34 358.8893 817.65<0.000 1** b4 704.514 704.5<0.000 1** e15 138115 138<0.000 1** h13 612.5113 612.5<0.000 1** be4140.647 8 bh36113610.002 7* eh361360.195 4 b221.32121.320.307 1 e244.47144.470.155 7 h2442.371442.370.001 5* 残差123717.57— 失拟项123341— 纯误差040— 总和34 481.8816——
注:“**”表示该项级显著(P<0.01 ;“*”表示该项显著(P<0.05。
;“*”表示该项显著(P<0.05。
图10给出了设计变量b、e、h在优化目标f上的三维响应面。通过对响应面的分析可以看出,随着厚度的增加、长短轴比的减小以及壳体高度的减小,频率呈上升趋势。
图10 设计变量在优化目标f上的三维响应面
Fig.10 3D response of f to the structure parameters
针对频率和声源级的回归模型,运用Design- Expert软件中的Optimization功能,以目标频率为480 Hz,声源级高于206 dB为条件,求解回归模型得到的前3个优化设计方案见表5。
表5 优化设计方案
Tab.5 Optimal design scheme

方案水平值优化目标 b/mme/mmh/mmf/HzSL 1109.1908.923215.602480.00208.622 2110.57210.264258.681479.999208.650 3100.7779.737209.398480.001208.501
表5中,方案1的壳体表面积约为0.22 m2、方案3的壳体表面积约为0.21 m2,均小于所期望的空化阈值面积,不予采用。因此在本设计中选取方案2,考虑到实际情况,取短轴长度为110 mm,壳体厚度为10 mm,壳体高度为260 mm。
利用三维多场耦合有限元仿真研究了该设计方案下的换能器的频率、声源级以及目标深度下的应力情况。此时换能器的谐振频率为472 Hz,声源级为208.71 dB,其在40 m时的最大应力为208 MPa,辐射面积为0.267 m2,满足极限应力边界条件以及空化阈值边界条件的要求。
依据第2节优化设计方案,本文研制了大功率低频超磁致伸缩Ⅳ型弯张电声换能器样机,并在东江湖的开阔水域范围内搭建了湖试实验平台。实验样机如图11a所示,该换能器样机在空气中重42 kg(不含电缆)。湖试实验平台分为干端与湿端两部分。其中,湿端部分主要由换能器样机与标准水听器组成。干端部分主要由数字功率放大器、阻抗匹配箱等供电单元和示波器等信号检测单元组成,如图11b所示。湖试实验平台的结构如图12所示,换能器距离水面40 m,距离湖底大于40 m。水听器放置在距离换能器声辐射中心1.5 m的位置。功率放大器经过阻抗匹配后为换能器提供不同频率的驱动电压与电流。通过检测换能器输入端的电压信号u、电流信号i及水听器的输出电压信号uo,可分析换能器的辐射声波波形并计算换能器的辐射声源级。该测试平台满足国家大功率电声换能器测试标准[27]。
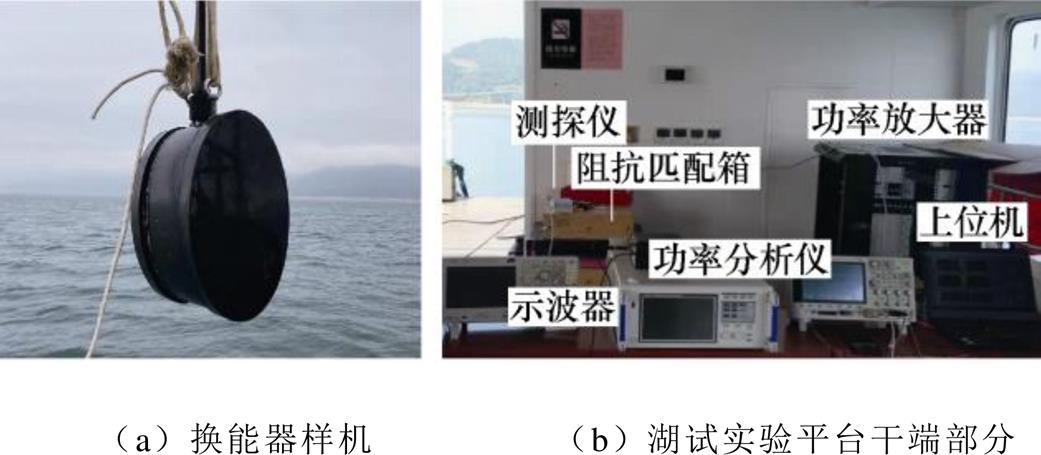
图11 超磁致伸缩Ⅳ型弯张电声换能器样机
Fig.11 Prototype of giant magnetostrictive Ⅳ flextensional electroacoustic transducer
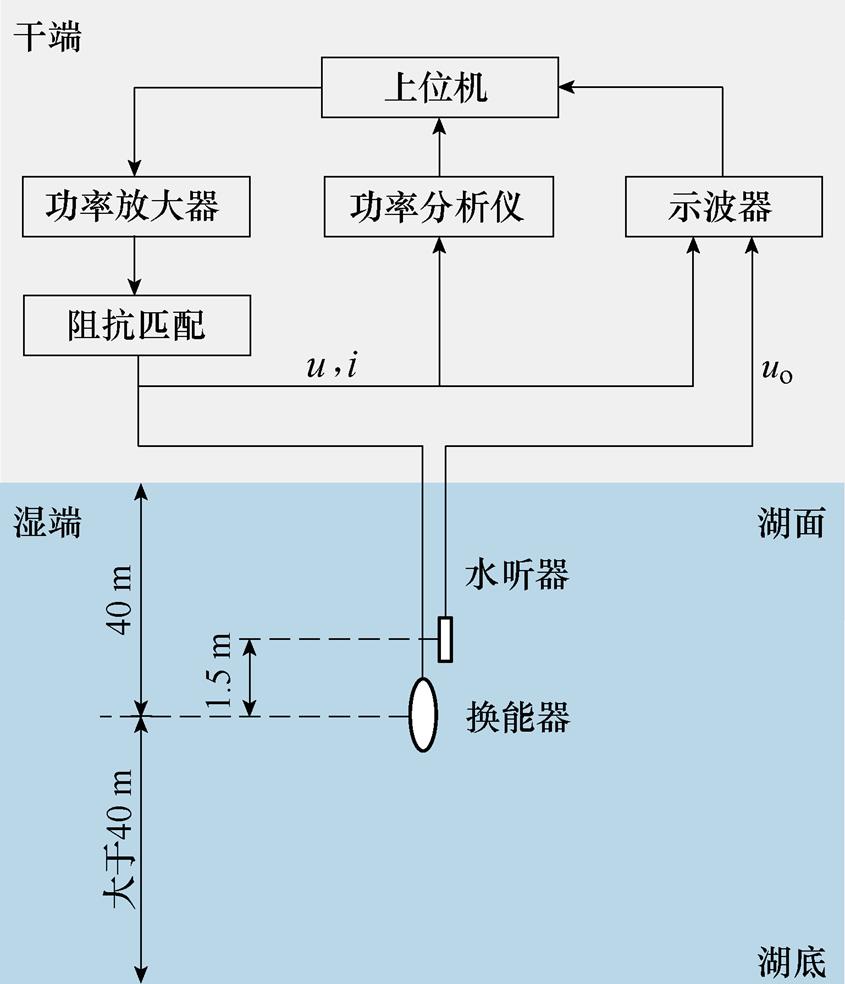
图12 湖试实验平台结构
Fig.12 Structure diagram of lake trail platform
为避免湖底与湖面的反射波的影响,采用脉冲发射方法进行测试。脉冲波个数由换能器与湖底及湖面的测试距离以及测试频率确定,本测试单次发射脉冲波数量为20。换能器样机在谐振频率处的输入电压、输入电流以及水听器输出电压波形如图13所示。此时换能器的工作频率为480 Hz,输入电流为16 A,声源级为206.1 dB,波形状况良好,未出现由于偏置磁场设计不当造成的“倍频现象”,也未出现由于空化而导致的非线性问题。
图14为换能器样机的实测最大声源级曲线。实验结果表明,该换能器在400~600 Hz内均可实现200 dB以上声源级发射,-3 dB带宽约为120 Hz,品质因数Q约为4。所研制的换能器样机在空化阈值范围内实现了目标深度下的目标声源级,证明了本文所提设计方法的合理性。实际谐振频率与仿真频率吻合度较好,误差在5 %范围内,符合要求。误差原因是在有限元仿真中对换能器物理模型进行了简化,未考虑密封部件及装配过程对换能器输出特性的影响。

图13 换能器样机测试波形
Fig.13 Test waveforms of the transducer
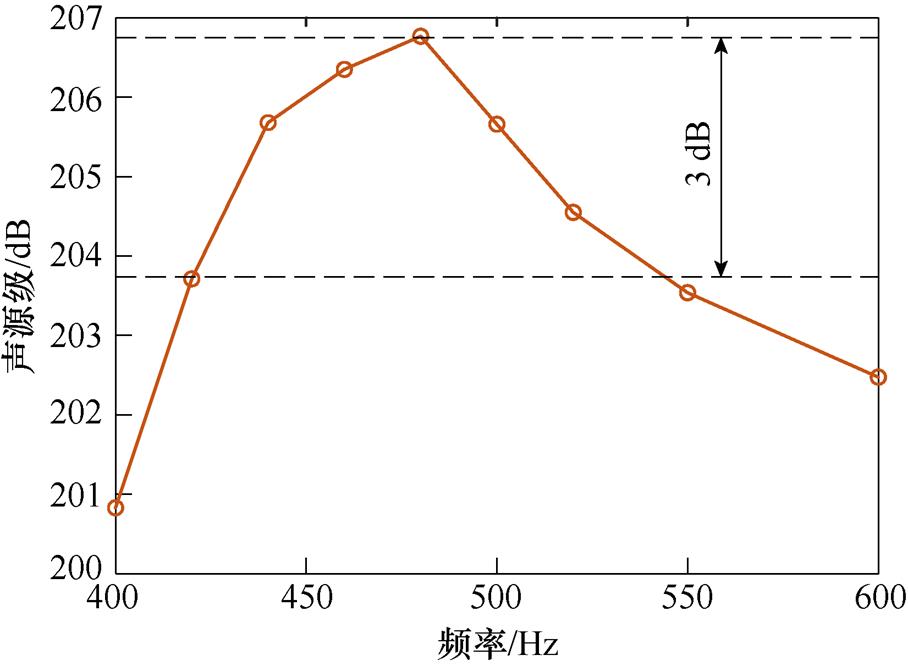
图14 实测最大声源级曲线
Fig.14 Measured maximum sound source level curve
本文将有限元设计方法和响应曲面法相结合,提出了一种综合考虑材料电参数极限、空化边界条件以及最大主应力边界条件的大功率低频超磁致伸缩Ⅳ型弯张电声换能器优化设计方法。该方法以换能器谐振频率和声源级为主要设计目标,以目标水深下的换能器电磁-机声多物理场边界为限定标准,其机械壳体参数优化过程可大大减少换能器制作与实验的成本,缩短研制周期。依据本文提出的换能器优化设计方法,得到了最终的优化设计方案,并研制了实验样机。标准的湖试结果表明:研制的超磁致伸缩Ⅳ型弯张换能器,在40 m目标工作水深下,谐振频率为480 Hz,最大声源级达到206 dB,符合预期设计目标,验证了本文所提优化设计方法的正确性。
参考文献
[1] Zhou Tianfang, Lan Yu, Zhang Qicheng, et al. A conformal driving class IV flextensional transducer[J]. Sensors, 2018, 18(7): 2102.
[2] Savoia A S, Mauti B, Caliano G. A low frequency broadband flextensional ultrasonic transducer array[J]. IEEE Transactions on Ultrasonics Ferroelectrics & Frequency Control, 2016, 63(1): 128-138.
[3] Guo Rongjing, Li Shiyang, Li Tangan, et al. Analysis and design of low frequency and high power flextensional transducer with double-grooves[J]. Applied Acoustics, 2019, 149: 25-31.
[4] Moffett M B, Clark A E, Wun-Fogle M, et al. Charac- terization of Terfenol-D for magnetostrictive trans- ducers[J]. The Journal of the Acoustical Society of America, 1991, 89(3): 1448-1455.
[5] Rusby J S M. The onset of sound wave distortion and cavitation in water and sea water[J]. Journal of Sound and Vibration, 1970, 13(3): 257-267.
[6] Yang Mingzhi, Yang Xin, Wei Yanfei, et al. SPICE modeling of a high-power Terfenol-D transducer considering losses and magnetic flux leakage[J]. IEEE Transactions on Ultrasonics, Ferroelectrics, and Fre- quency Control, 2022, 69(2): 812-822.
[7] Pyo S, Lim Y, Roh Y. Analysis of the transmitting characteristics of an acoustic conformal array of multimode tonpilz transducers by the equivalent circuit method[J]. Sensors and Actuators A: Physical, 2021, 318: 112507.
[8] Brigham G A. Analysis of the class-IV flextensional transducer by use of wave mechanics[J]. The Journal of the Acoustical Society of America, 1974, 56(1): 31-39.
[9] Lam Y W. Mathematical model of a class IV flex- tensional transducer and its numerical solution[J]. Applied Acoustics, 1992, 36(2): 123-144.
[10] 赵能桐, 杨鑫, 陈钰凯, 等. 考虑超磁致伸缩材料非均匀性的大功率电声换能器阻抗特性[J]. 电工技术学报, 2021, 36(10): 1999-2006.
Zhao Nengtong, Yang Xin, Chen Yukai, et al. The impedance characteristics of high power electro- acoustic transducer considering the inhomogeneity of giant magnetostrictive material[J]. Transactions of China Electrotechnical Society, 2021, 36(10): 1999- 2006.
[11] Wang Liang, Hofmann V, Bai Fushi, et al. Modeling of coupled longitudinal and bending vibrations in a sandwich type piezoelectric transducer utilizing the transfer matrix method[J]. Mechanical Systems and Signal Processing, 2018, 108: 216-237.
[12] Kurt P, Sansal M, Tatar İ, et al. Vibro-acoustic design, manufacturing and characterization of a tonpilz-type transducer[J]. Applied Acoustics, 2019, 150: 27-35.
[13] Chen Si, Lan Yu, Zhu Z. The study of broadband flextensional transducer[J]. International Society for Optics and Photonics, 2013, 8768:87685L.
[14] 蓝宇, 王文芝, 王智元, 等. IV弯张换能器的有限元法应力分析[J]. 哈尔滨工程大学学报, 2001, 22(3): 33-36, 2.
Lan Yu, Wang Wenzhi, Wang Zhiyuan, et al. Stress analysis of class IV flextensional transducers by FEM[J]. Journal of Harbin Engineering Universtity, 2001, 22(3): 33-36, 2.
[15] 翁玲, 曹晓宁, 胡秀玉, 等. 双线圈铁镓合金换能器的输出特性[J]. 电工技术学报, 2018, 33(19): 4476-4485.
Weng Ling, Cao Xiaoning, Hu Xiuyu, et al. Output characteristics of double coil Fe-Ga alloy trans- ducer[J]. Transactions of China Electrotechnical Society, 2018, 33(19): 4476-4485.
[16] 杜杲娴, 杨鑫, 韦艳飞, 等. 稀土超磁致伸缩棒材特性测试平台优化与实验研究[J]. 电工技术学报, 2021, 36(18): 3867-3875.
Du Gaoxian, Yang Xin, Wei Yanfei, et al. Optimi- zation and experimental research on the test platform of rare-earth gaint magnetostrictive rod characteri- stics[J]. Transactions of China Electrotechnical Society, 2021, 36(18): 3867-3875.
[17] Huang Wenmei, Song Guiying, Sun Ying, et al. Numerical dynamic strong coupled model of linear magnetostrictive actuators[J]. IEEE Transactions on Magnetics Magnetics, 2012, 48(2): 391-394.
[18] 李宽, 蓝宇. 稀土IV型弯张换能器研究[J]. 声学技术, 2015, 34(5): 467-471.
Li Kuan, Lan Yu. Research of a class IV rare-earth flextensional transducer[J]. Technical Acoustics, 2015, 34(5): 467-471.
[19] 刘永平, 莫喜平, 柴勇, 等. 双壳嵌套鱼唇式弯张换能器[J]. 声学学报, 2019, 44(6): 1060-1067.
Liu Yongping, Mo Xiping, Chai Yong, et al. Fish- mouth flextensional transducer with nested double shells[J]. Acta Acustica, 2019, 44(6): 1060-1067.
[20] Moosad K P B, Chandrashekar G, Joseph M J, et al. Class IV flextensional transducer with a reflector[J]. Applied Acoustics, 2011, 72(2/3): 127-131.
[21] 赵玫, 于帅, 邹海林, 等. 聚磁式横向磁通永磁直线电机的多目标优化[J]. 电工技术学报, 2021, 36(17): 3730-3740.
Zhao Mei, Yu Shuai, Zou Hailin, et al. Multi- objective optimization of transverse flux permanent magnet linear machine with the concentrated flux mover[J]. Transactions of China Electrotechnical Society, 2021, 36(17): 3730-3740.
[22] 李祥林, 李金阳, 杨光勇, 等. 电励磁双定子场调制电机的多目标优化设计分析[J]. 电工技术学报, 2020, 35(5): 972-982.
Li Xianglin, Li Jinyang, Yang Guangyong, et al. Multi-objective optimization analysis of electric- excitation double-stator field-modulated machine[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 972-982.
[23] Zhao Wenxiang, Ma Anqi, Ji Jinghua, et al. Multi- objective optimization of a double-side linear vernier PM motor using response surface method and differ- ential evolution[J]. IEEE Transactions on Industrial Electronics, 2020, 67(1): 80-90.
[24] 唐昭晖, 许志红. 基于响应面法的交流接触器弹簧系统优化设计方法[J]. 电工技术学报, 2022, 37(2): 515-527.
Tang Zhaohui, Xu Zhihong. Optimal design method for AC contactor spring system based on response surface method[J]. Transactions of China Electro- technical Society, 2022, 37(2): 515-527.
[25] Teng Duo, Li Yatian. Finite element solutions for magnetic field problems in Terfenol-D transducers[J]. Sensors, 2020, 20(10): 2808.
[26] Aykut Şahin. Barrel-stave flextensional transducer design[D]. Ankara: Bilkent University, 2009.
[27] GB/T 7967-2002 声学-水声发射器的大功率特性和测量[S]. 2002.
Abstract Class Ⅳ giant magnetostrictive flextensional transducer (GMFT) is an effective equipment to realize high-power and low-frequency underwater acoustic emission, which has broad application prospects in the fields of underwater long-distance detection and communication. However, many parameters and boundaries affect the output performance of GMFT, the electromagnetic parameter limit of giant magnetostrictive material (Terfenol-D), the cavitation boundary of the transducer shell, and the limit stress boundary are important limiting conditions for improving the radiated sound power of Class Ⅳ GMFT at the target depth. It is necessary to quickly establish the relationship among parameters, output frequency, and sound source level, thereby obtaining the design scheme. Therefore, combined with the finite element design method (FEM) and the Box-Behnken response surface method, an optimization design method of Class Ⅳ GMFT is proposed considering electrical-magnetic-mechanical-acoustic multi-field boundaries.
Firstly, the number of vibrating rods is determined according to the target frequency f0, the target sound source level SL, and the electromagnetic parameter limits of Terfenol-D. Secondly, to reduce the eddy current loss and improve the uniformity of the magnetic field, an efficient magnetic loop structure is designed, and an efficient bar cutting method is proposed. The FEM results show that the mean value increases by 22 %, and the non-uniformity decreases by 32 %. Thirdly, the range of shell structural parameters is determined according to the magnetic loop structure and cavitation threshold area under the target water depth. Finally, taking the shell semi-minor axis length b, shell thickness e, and shell height h as the optimization variables and frequency and sound source level as the optimization objectives, the Box-Behnken response surface model is built based on FEM. It shows that the frequency increases with the increase of b and e and the decrease of h. When the frequency is within 5 % of the target frequency, the sound source level is greater than the target SL, and the maximum principal stress does not exceed the yield stress limit. The optimized structural parameters meet the design requirements and can be adopted as the final design scheme.
A prototype of Class Ⅳ GMFT with the optimized shell structural parameters is developed, and a lake experimental platform is built. The experimental results show that the transducer's resonant frequency is 480 Hz, and the maximum sound source level reaches 206 dB under the target water depth of 40 m. There is no “frequency doubling phenomenon” caused by improper design of bias magnetic field and no nonlinear problem caused by cavitation, which verifies the feasibility and accuracy of the proposed optimal design method.
In conclusion, the theoretical analysis and experimental results show that the proposed optimization design method can quickly obtain the relationship among the structural parameters, the frequency, and the sound source level. Thus, the optimal design scheme is obtained in line with the electro-magnetic-mechanic-acoustic boundary conditions and the design objectives, greatly reducing the development and testing cost and shortening the development cycle.
keywords:Magnetostrictive, flextensional transducer, optimal design, cavitation boundary, stress limit
DOI: 10.19595/j.cnki.1000-6753.tces.220702
中图分类号:TM271; TB565
国家重大科研仪器研制项目(52127901)和国家自然科学基金重点项目(51837005)资助。
收稿日期 2022-05-06
改稿日期 2022-05-14
宁 倩 女,1995年生,博士研究生,研究方向为低频大功率电声换能器的建模及设计。E-mail: ningqian@hnu.edu.cn
李 桥 男,1993年生,副教授,博士生导师,研究方向为电力电子与电力传动、低频大功率电声换能器。E-mail: qiaoli@hnu.edu.cn(通信作者)
(编辑 陈 诚)