 1的主动式微粒抑制方法的动态配合实验平台,验证了高压电极上布置驱赶电极的有效性;同时,通过大量实验验证了仿真结果的准确性,以及对比了有无驱赶电极情形下系统抑制金属微粒的能力。因此,本文研究结果可进一步提高直流GIL抑制微粒的能力,对将来气体绝缘系统抑制金属微粒的研究具有一些参考意义。
1的主动式微粒抑制方法的动态配合实验平台,验证了高压电极上布置驱赶电极的有效性;同时,通过大量实验验证了仿真结果的准确性,以及对比了有无驱赶电极情形下系统抑制金属微粒的能力。因此,本文研究结果可进一步提高直流GIL抑制微粒的能力,对将来气体绝缘系统抑制金属微粒的研究具有一些参考意义。摘要 直流气体绝缘输电线路(GIL)中自由金属微粒的活性较之交流GIL中更为活跃,对直流GIL的技术发展以及应用带来了严峻的挑战。目前,将各种抑制微粒手段进行主动式动态配合设计是未来发展的趋势。该文搭建直流GIL金属微粒主动式抑制的动态配合实验平台,并结合有限元仿真,从陷阱捕获率的角度优化了驱赶电极与陷阱间的位置配合;同时提出直流老练优化程序,最终获得主动式微粒抑制的动态配合有效方案。研究结果表明,当驱赶电极与陷阱间的距离为18 mm时,陷阱捕获率可高达70 %;该文优化后的直流老练程序较传统程序可使陷阱捕获性能提升50 %以上;最后通过实验验证了驱赶电极的有效性,且通过大量实验发现,高压电极布置驱赶电极后,陷阱捕获率可提高50 %以上。因此,该文结果对提升直流GIL抑制金属微粒的能力具有一定的参考价值。
关键词:直流气体绝缘输电线路(GIL) 金属微粒抑制 驱赶电极 微粒陷阱 直流老练程序 动态配合
随着我国特殊区域能源开发利用的需求及其发展,以SF6或SF6混合气体为绝缘介质的气体绝缘金属封闭输电线路(Gas Insulated metal enclosed transmission Line, GIL)由于其输送容量大、能源损耗低、维护成本低以及对环境友好等优点,在电力系统中受到广泛的关注并得到逐步的应用[1-3]。然而在气体绝缘设备中,不可避免地存在的自由金属微粒会引发电场畸变,且运动微粒将引起气隙击穿[4-5]。同时,位于绝缘子附近的金属微粒还会受到绝缘子表面积聚电荷所产生的库仑力,从而吸附其表面,进一步加剧绝缘子表面电荷积聚情况,最终将导致绝缘子沿面闪络故障[6-7]。因此,为了抑制气体绝缘系统中的自由金属微粒,提出的主要手段有微粒陷阱、驱赶电极、屏蔽环和老练程序等。
目前,关于每种微粒抑制手段的原理及应用场景,国内外学者均已有了一致性的认知[8]。在交流GIL/GIS(gas insulated switchgear)设备中应用的微粒陷阱,国际上已推出了较为成熟的产品,其设计思想主要考虑陷阱凹槽处的电场屏蔽效果,但未从实际捕捉效果角度进行设计[9-10]。然而在直流GIL中,微粒运动活性非常大且贯穿电极间隙,从而微粒入陷后极易发生二次逃逸。为此华北电力大学李庆民团队[11]针对性地设计了一种连续相同楔形穿透形槽孔构成的微粒陷阱,即陷阱侧壁与外壳底部呈一定角度,从而陷阱凹槽处高效屏蔽电场的同时也可阻挡已入陷的金属微粒。西屋电气公司的S. J. Dale等学者[12]为了进一步提高陷阱的捕获效率,通过实验筛选出一种在70 ℃ SF6环境当中其黏附寿命超过40年的黏附材料,并将此材料涂覆在陷阱凹槽底部时,在直流电压下微粒入陷后可有效防止二次逃逸从而提高捕获概率。因此,为进一步提高微粒陷阱的捕获率,将驱赶电极、老练程序与微粒陷阱进行有效配合是抑制微粒的必然方向[13]。
驱赶电极是由空心圆台和空心环结构的铝制材料制成,分别紧扣在高压导杆上。当微粒与圆台型驱赶电极碰撞时,微粒在其碰撞所在处将受到轴向电场力,且由于碰撞反弹原理,可有一定概率在轴向上反弹并远离绝缘子周围区域[14-16]。然而,目前的研究只通过导体表面电场强度的分布角度分析了驱赶电极和屏蔽环的可行性,缺乏实际抑制微粒运动活性的效果,且未考虑陷阱间的配合作用。金属微粒的老练程序则是指在GIL/GIS上阶梯式或连续加压,使设备内部的金属微粒迁移至微粒陷阱等低电场区域,或放电烧灼细小异物的抑制手段[17]。但关于老练程序至今还未从理论角度分析研究抑制微粒的有效性。
综上所述,国内外学者研究微粒陷阱时还未考虑驱赶电极的合理布置以及与老练程序间的配合设计。因此,本文为了进一步提高抑制金属微粒的效果,首先利用微粒与电极碰撞反弹理论提出微粒与驱赶电极碰撞反弹的模型,结合COMSOL有限元仿真软件和Matlab程序,建立平板电极模拟仿真平台和陷阱捕获概率模型,从陷阱捕获率的角度优化了驱赶电极与微粒陷阱间的最佳位置配合。其次,根据在驱赶电极影响下不同尺寸微粒最佳驱赶电压等级,提出直流老练优化方法,从而得到主动式微粒抑制方法的动态配合有效方案。最后,搭建与仿真平台尺寸11的主动式微粒抑制方法的动态配合实验平台,验证了高压电极上布置驱赶电极的有效性;同时,通过大量实验验证了仿真结果的准确性,以及对比了有无驱赶电极情形下系统抑制金属微粒的能力。因此,本文研究结果可进一步提高直流GIL抑制微粒的能力,对将来气体绝缘系统抑制金属微粒的研究具有一些参考意义。
在GIL气室中,存在的毛刺或电极尖刺会导致其附近电场分布畸变,从而引发局部放电或气体击穿故障的主要诱导因素。同样,将驱赶电极布置于高压电极时也会改变原有的电场分布,因此应用驱赶电极时,有必要分析对电场强度的畸变程度,从而进行电场调控。
目前现场运行的GIL系统中,应用屏蔽环来保护或屏蔽气室间或绝缘子处的法兰等零件。因此,若使驱赶电极合理布置在高压电极上,应保证驱赶电极处的最高畸变电场强度不大于屏蔽环处的电场强度。为了比较驱赶电极与屏蔽环对系统电场畸变的程度,将如图1所示的驱赶电极和屏蔽环的模型建立在有限元仿真COMSOL中,应用静电场模块计算系统的电场强度分布。仿真模型中,上下电极板长度为100 mm,上电极板施加直流高电压,下极板则接地;依据文献[18]的绝缘间距设计原则选用屏蔽环和驱赶电极的尺寸:屏蔽环圆台外环最大半径选为4 mm;驱赶电极圆台最大半径和长度则分别选为3 mm和45 mm。上下极板、驱赶电极所用材料为金属铝,其弹性模量为70 GPa、泊松比为0.3、密度为2.7 g/cm3,左右两侧的边界条件设置为接近绝缘子附近,即当微粒运动到两侧边界时,认定为微粒抑制失败。当模型外施电压为15 kV时,通过模拟计算可得,在驱赶电极和屏蔽环的圆台处的电场强度具有很大的畸变。因此,本文截取图1所示的AB截线的电场强度分布,如图2所示。
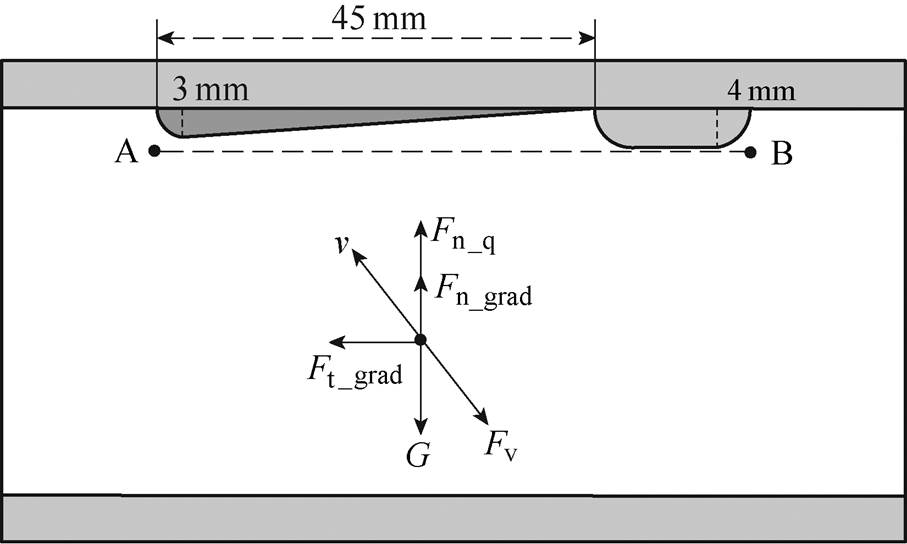
图1 电极模型及微粒受力示意图
Fig.1 Schematic diagram of the electrode model and the forces on the particle
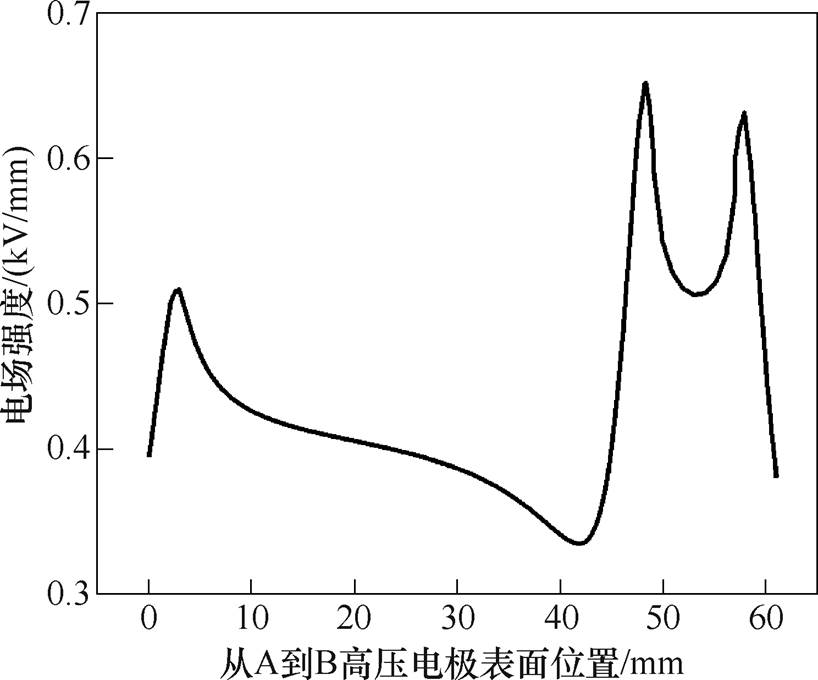
图2 驱赶电极和屏蔽环表面电场分布
Fig.2 The electric field distribution on the surface of the driving electrode and the shielding ring
从图2的电场分布可知,系统中最大畸变电场强度在屏蔽环的两侧,而并非在驱赶电极圆台最大外径处,且最大畸变电场强度值为0.65 kV/mm。根据文献[19]中所指出的非同轴圆柱形稍不均匀电场系统的允许电场强度E0的取值方法可得,本文系统中的允许电场强度E0为5.35 kV/mm,远大于系统最大畸变电场强度值。因此,从系统电场强度调控角度分析,应用驱赶电极抑制金属微粒是可行性的。
本文在高压导体上布置驱赶电极是为防止金属微粒靠近绝缘子表面,即不可忽略轴向不均匀电场强度的作用,且为方便研究微粒的受力运动及碰撞反弹情况,可在轴向平面上考虑微粒的受力情况。由于不同形状微粒带电机理和受力类型相同,因此本文将球形金属微粒作为运动行为的研究对象,在GIL系统中微粒受力分析如图1所示,受力解析式见表1。
表1 球形金属微粒受力解析式
Tab.1 The analytical formula for the force of spherical metal particles
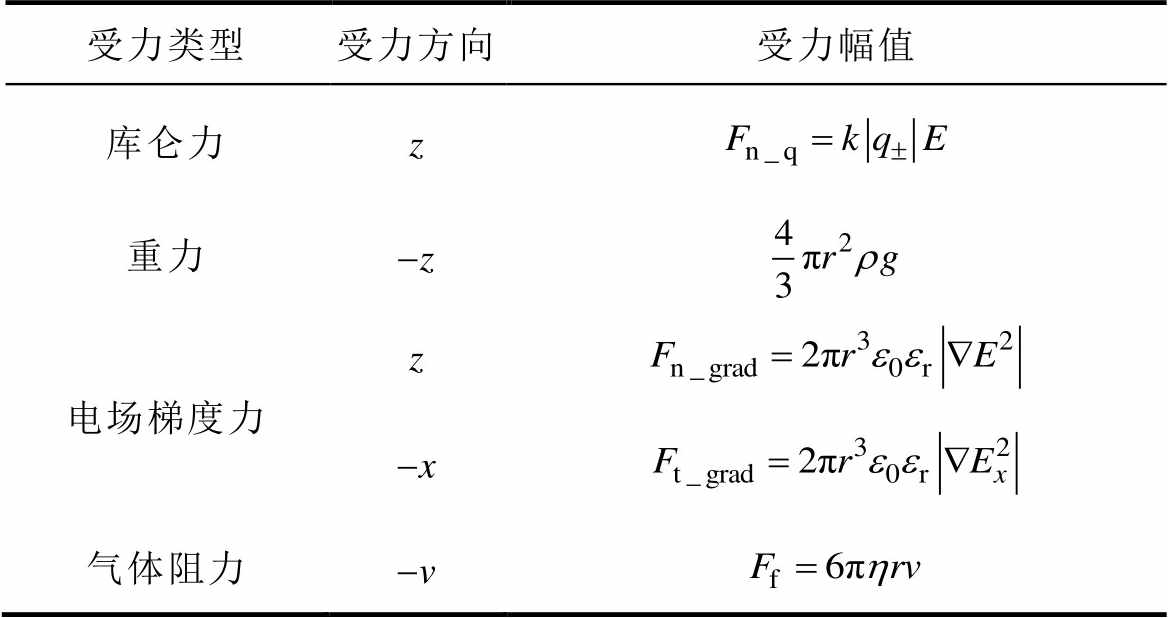
受力类型受力方向受力幅值 库仑力z 重力-z 电场梯度力z -x 气体阻力-v
表1中,k为镜像电荷引起的修正系数,当微粒处于电极表面或接近同极性电极时k=0.832,其余情况时k=1;q±为微粒所带的正极性或负极性电荷量;E为微粒与电极碰撞处的电场强度;r为微粒半径;r 为微粒材料的密度;g为重力加速度;e0为真空介电常数;er为SF6相对介电常数;h 为气体黏性系数。
微粒与电极接触或碰撞而带电,其所带电荷量以及极性可表示为
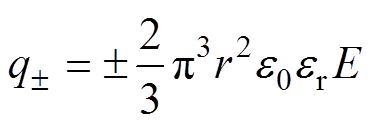 (1)
(1)
微粒所带电荷极性与碰撞电极极性相同。
直流应力下金属微粒在气隙中贯穿后,以某一角度a 与电极发生碰撞,此时将存在一定的冲击压痕。同时也因为塑性变形、摩擦和振动波传播等造成动能损失,属于非弹性碰撞。因此,微粒碰撞电极过程中通常采用速度恢复系数来考虑此情况。由于从微观上分析碰撞过程时,法向和切向碰撞本质上有所不同,通常可分解为法向和切向解耦[20]。根据文献[21]研究,微粒初始法向速度v1n与法向速度恢复系数hn的关系为
 (2)
(2)
式中,v1n的取值范围为1.7~24 m/s,若v1n<1.7 m/s时,hn=0.96,可见随初始法向速度增大,法向速度恢复系数减小,且减小的趋势逐渐弱小。
由于微粒碰撞的电极表面并不光滑,存在一定的表面粗糙度,因此微粒沿切向上剪切变形以及摩擦做功,从而消耗微粒的动能,并且由于电极表面粗糙度不匀,微粒碰撞后反射的速度大小和方向不确定,具有很强的随机性。其中由于高压电极和外壳表面粗糙度的不同,分别设随机反射角范围为2gi(i=1, 2,见图3),且表达式为
 (3)
(3)
式中,i=1, 2分别为微粒与高压电极和外壳碰撞情形;b 为反射角;a 为入射角;s 为碰撞反弹随机数,其取值范围为[-1, 1]。
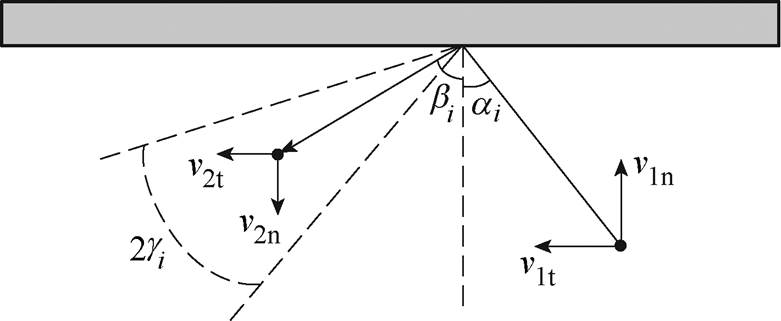
图3 金属微粒与无陡度电极碰撞反射的随机现象
Fig.3 Random phenomenon of collision reflection between metal particles and electrodes
因此,根据数学关系推导微粒碰撞电极后的切向速度v2t可表示为
 (4)
(4)
从而可进一步推导出微粒的切向速度恢复系数ht的表达式为
 (5)
(5)
为体现驱赶电极对金属微粒运动抑制的有效性,以及陷阱的捕获效率,本文在COMSOL有限元软件中耦合静电场模块和粒子追踪模块,建立如图4a所示的平板电极模拟平台。其中,电极间距d=40 mm;陷阱槽宽、槽间距和厚度均为3 mm。由于同轴圆柱电极系统中的微粒运动特性本质上与平板电极系统无区别,且在实验中便于观察微粒动态过程,因此可采用平板电极系统从类轴向上掌握微粒运动规律。
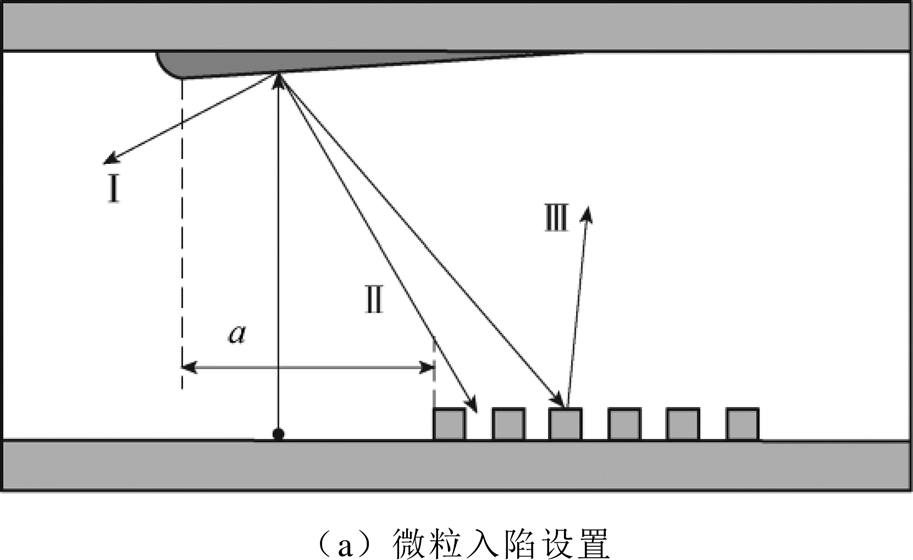

图4 仿真模型的设置
Fig.4 Simulation model settings
微粒运动仿真参数设置为:半径0.1~1 mm铝制球形微粒,其起始运动点位于距驱赶电极圆台最大外径处右侧水平线3 mm处的外壳内壁上;密度为2.7 g/cm3;SF6气压和黏性系数分别为0.1 MPa和1.377×10-5 Pa·s,高压电极、外壳(和陷阱槽面)随机变化角度分别为g1=10 °、g2=20 °。图4b为平板电极系统的网格划分方式,其中三结合点和电极、陷阱的棱角点对电场分布有很大影响,因此将此类点处网格剖分更为细致。
同时,由于微粒在电极间往复贯穿碰撞过程中具有很强的随机性,因此本文基于蒙特卡洛思想,借助Matlab程序建立金属微粒抑制的随机概率模型,即此模型可将不同工况的COMSOL运动仿真分别运行多次,得出不同尺寸的金属微粒反方向反弹从而成功捕获的概率。由于不管运行次数,陷阱捕获率均存在方差。但运行多次后陷阱捕获率将具有稳定性分布,因此本文将每种工况运行100次,可保证概率分布的可靠性。图4a所示为仿真中假设微粒与驱赶电极碰撞后有三种运动状态:Ⅰ为微粒在轴向沿远离陷阱方向运动;而Ⅱ、Ⅲ为在轴向上反弹时远离绝缘子进入陷阱区域内,其中Ⅱ为金属微粒进入低电场区后不再跳起,直接被陷阱捕获;Ⅲ为金属微粒与陷阱槽面碰撞反弹且往复运动过程中未能被陷阱捕获。若假设运动状态Ⅱ视为被陷阱成功捕获,那么不同工况下陷阱捕获率pcap可表示为
 (6)
(6)
式中,NⅡ为微粒被捕次数;Nsum为微粒总发射次数。
图5为基于以上仿真思路而设计的微粒运动仿真计算流程。当微粒静止于外壳内壁时,在轴向上受到的电场力很小[22],从而难以克服微粒静止摩擦力。然而在径向上,一旦微粒满足Fq+Fd≥G时,微粒即可启举。每次COMSOL仿真结束条件有两个:①微粒成功被捕获;②到达仿真时长。其中,仿真时长与微粒被捕获概率有较大相关性,若仿真时长较短,微粒还未运动至陷阱区域计算就结束,但仿真时长较长又保证微粒入陷的不确定性,从而使仿真结果更为合理。然而,若微粒运动过程当中离开驱赶电极和陷阱区域后,微粒在上、下电极板间反弹多次,最终将到达旁边的边界,即可认定为微粒抑制失败。因此,仿真时长的合理设定既能保证仿真结果的准确性,也能避免过长的仿真时间。图6为陷阱捕获失败率与仿真时长间的关系,因此本文设定每次仿真的时长为3 min。
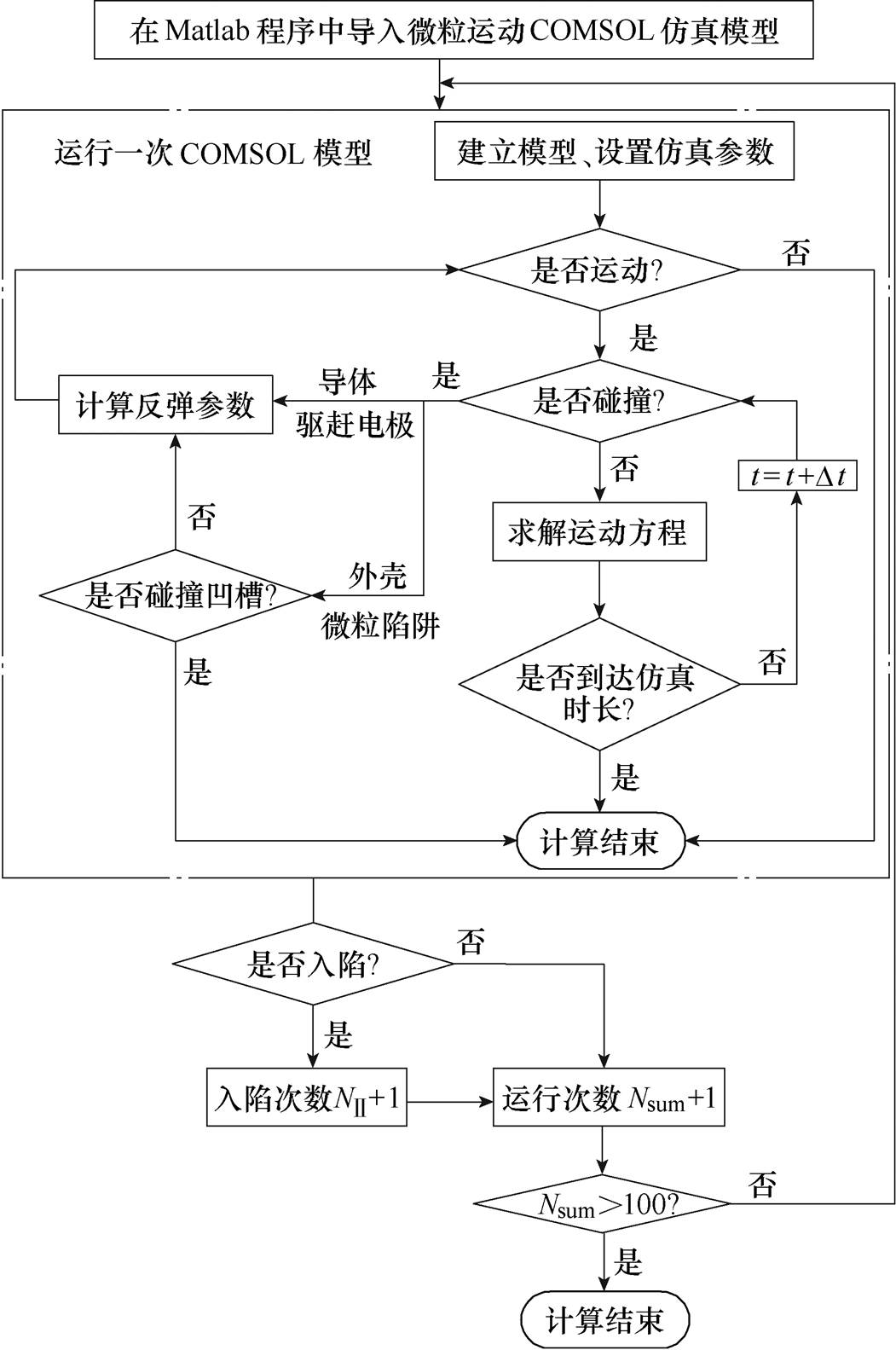
图5 微粒运动仿真流程
Fig.5 Simulation process of particle motion
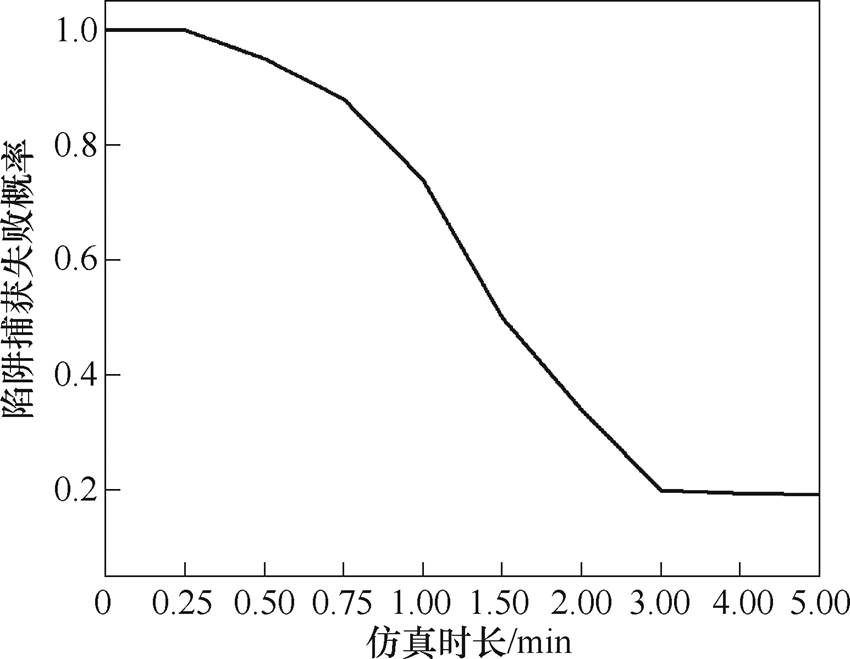
图6 仿真时长与微粒被捕不确定性间关系
Fig.6 The relationship between simulation time and particle capture uncertainty
1.4.1 驱赶电极对微粒运动的阻挡作用
为了便于对比有无驱赶电极情形下微粒运动轨迹的特点,本文仿真过程中将反弹角度大小设置为10 °,而方向未固定设置。由图7可得,有无驱赶电极情形下,微粒运动轨迹的相同点在于微粒启举之后与高压电极或驱赶电极碰撞反弹时,反弹速度恢复得非常快,且运动速度越来越大;而与接地外壳碰撞后,反弹速度恢复得较慢。这是由于微粒与高压电极碰撞所带电荷量大于与外壳碰撞所带电荷量,因此在同一位置处,微粒与高压电极碰撞后的库仑力大于外壳碰撞后的库仑力,即Fq+>Fq-。
然而有无驱赶电极主要区别在于,裸导体上布置驱赶电极时将明显降低微粒的启举电场强度。并且当微粒与驱赶电极碰撞时有很大概率可改变微粒在轴向上的运动方向。对此情况,本文认为,当微粒与驱赶电极碰撞时,由于驱赶电极圆台表面存在陡度,因而使微粒在切向上难以克服剪切变形和摩擦能,同时驱赶电极的斜面存在轴向电场又使微粒受到与轴向运动相反方向的电场力,因此,微粒在驱赶电极的驱赶以及阻挡作用下,在轴向上有概率反方向反弹从而朝向陷阱区域。
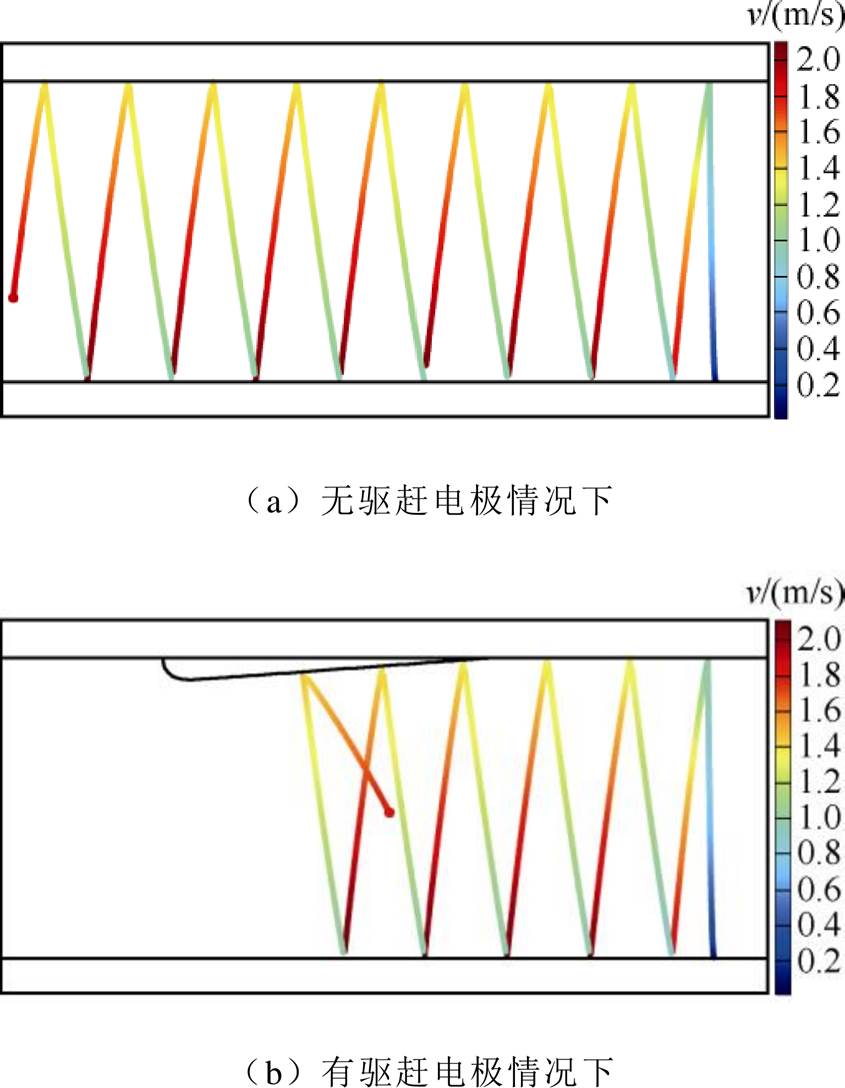
图7 金属微粒的运动轨迹
Fig.7 The motion track of metal particles
在实际情况下驱赶电极同样存在表面粗糙度,即微粒与驱赶电极碰撞反弹时的速度反射角也具有随机性的变化,此时随机反射角记为l,如图8所示。同时,由于微粒与驱赶电极的碰撞反弹后首次落地分布具有一定的集中性,这将为驱赶电极与陷阱间有效配合提供依据。
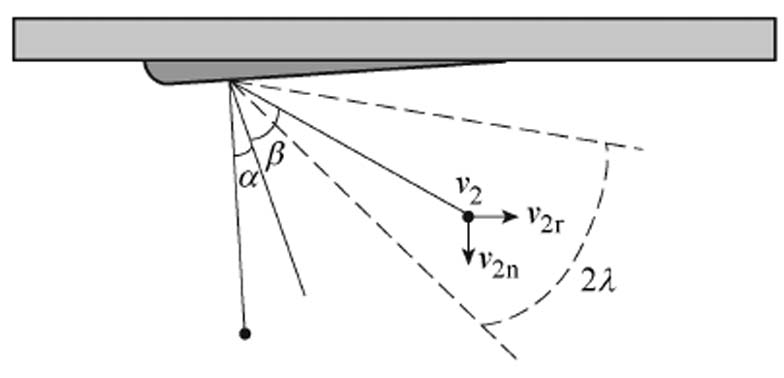
图8 微粒与驱赶电极碰撞反射的随机现象
Fig.8 Random phenomenon of collision reflection between metal particles and driving electrode
1.4.2 驱赶电极影响下不同尺寸微粒的启举电压
由1.4.1节分析结果可知,在高压电极上布置驱赶电极可明显降低微粒的启举电压值。因此,为后续优化直流老练程序的研究内容,本文通过仿真模型可计算出在驱赶电极影响下不同尺寸微粒的启举电压,如图9所示。
由图9不同尺寸金属微粒启举电压值的分布可以得出以下规律:对于抑制不同尺寸微粒而言,均有对应的最佳驱动电场,且当微粒尺寸相对较小时,每增加0.1 mm(如半径0.1~0.2 mm时),所需启举电压的跨度大;相反,尺寸相对大时,所需启举电压的跨度小。因此可依据以上理论,设计或优化可抑制所有不同尺寸微粒的直流老练程序。
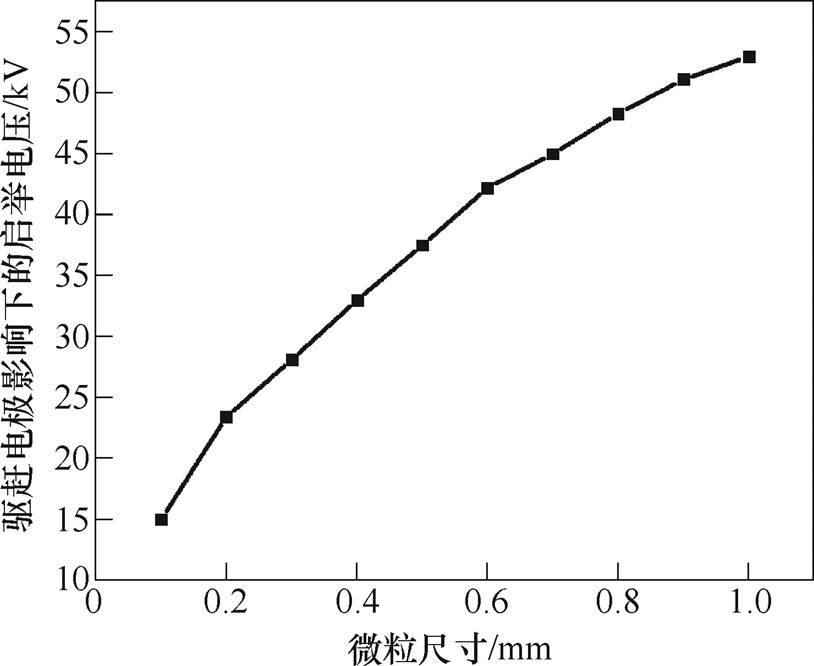
图9 驱赶电极影响下不同尺寸微粒的启举电压
Fig.9 The lift-off voltage of particles of different sizes under the influence of driving electrode
为进一步提升直流GIL抑制微粒活性以及陷阱的捕捉效果,本文依据微粒在驱赶电极影响下的运动轨迹特点,仿真优化了驱赶电极与陷阱间的位置和直流老练程序,使驱赶电极、直流老练程序与微粒陷阱之间的主动式抑制的动态配合更为恰当。
由图4a可知,驱赶电极与陷阱间的位置定义为驱赶电极圆台最大外径处至陷阱左侧外壁间水平线上的距离a。本文以陷阱捕获率为优化目标,以位置a为优化参数,以气体绝缘设备电场强度设计基准E0为边界条件,对驱赶电极与陷阱间位置配合进行优化。因此,其目标函数以及约束条件分别为
 (7)
(7)
 (8)
(8)
式中,f(a)为微粒入陷状态随机性的目标函数。
仿真中,选取半径0.1 mm微粒,外施电压为15 kV,选取21种驱赶电极与微粒陷阱间位置。当位置a过近时,不满足电场强度设计基准值要求;相反,过远时会失去驱赶电极与陷阱间的位置配合意义,因此其取值范围为10~30 mm。不同位置下陷阱捕获率如图10所示。由图10可得,在相同驱赶电极与陷阱参数条件下,随着位置a的增加,陷阱捕获率呈现先增后减的趋势,即该过程中出现极大值点。在设置相同电压等级和微粒尺寸情形下,当驱赶电极与陷阱间的位置a=18 mm时,陷阱具有最佳捕获效率0.70。
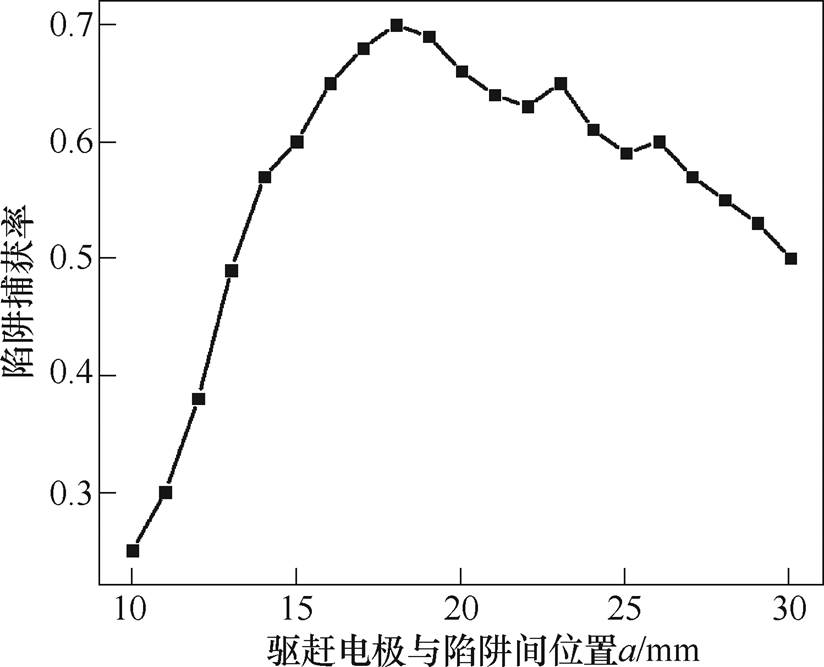
图10 不同位置下陷阱捕获率
Fig.10 Trap capture rates under different possitions
本文通过获取到的微粒运动轨迹分析此现象的原因:如图11a所示,当位置过近时,陷阱左侧存在低电场区域,因此微粒启举后受电场梯度力的影响下运动角度往左侧偏离程度较大[23],易与驱赶电极圆台最大外径处碰撞或错过驱赶电极的范围,从而使其对微粒抑制的特性大大失效;相反,位置过远时陷阱捕捉微粒时间长,且微粒在电极间反复运动次数较多时无疑极大程度地增加了绝缘破坏的风险,如图11b所示。
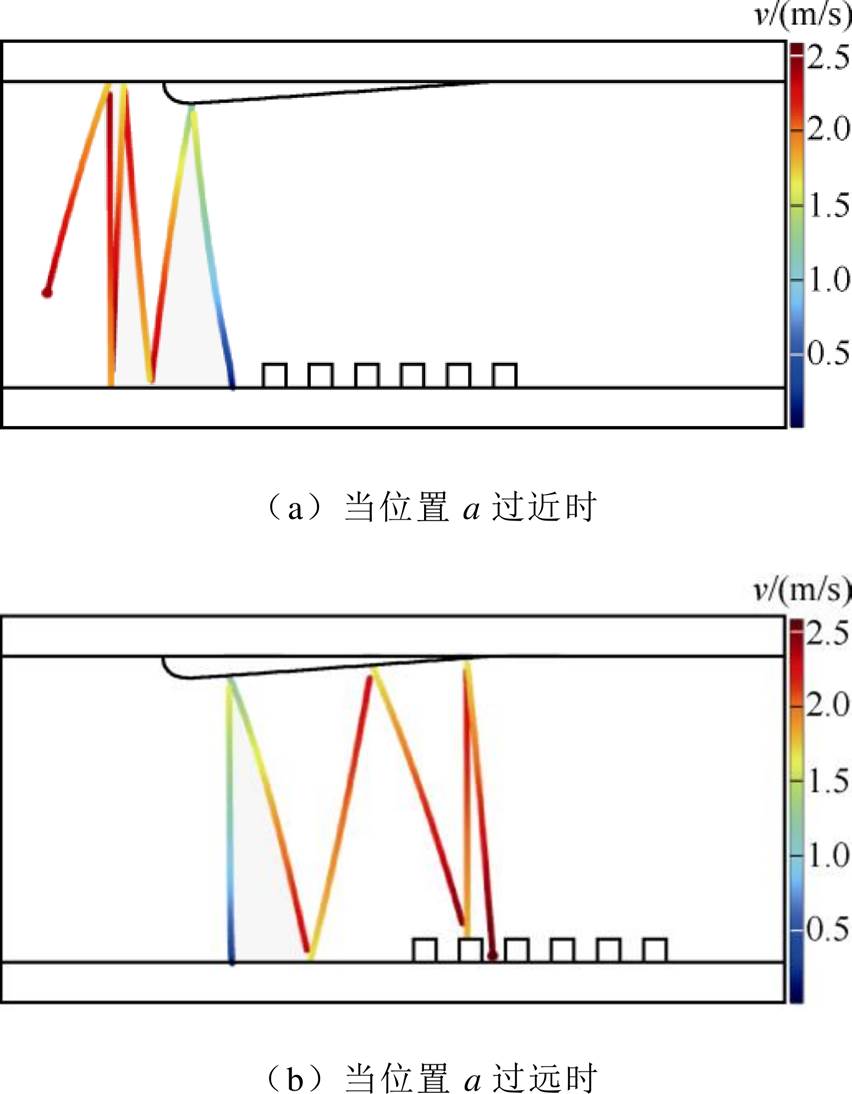
图11 驱赶电极与陷阱间位置配合捕捉效果
Fig.11 The position between the driving electrode and the trap cooperates with the capturing effect
根据DL/T 304-2011《气体绝缘金属封闭输电线路现场交接试验导则》中的相关规定[24],老练试验的基本原则是既要净化设备,又要减小净化过程中由微粒触发的击穿,还要减少对设备的损害。因此老练程序逐级加压,在低电压等级下保持较长的时间,而在高电压等级下保持较短的时间,使金属微粒迁移至低电场区域(如微粒陷阱)里,减轻对绝缘的负担。
目前,老练程序所用电压以交流电压为主,且针对直流气体绝缘设备尚无耐压试验的相关研究。但一方面,直流耐压与交流耐压试验相比,对发现绝缘某些局部缺陷具有特殊的作用,同时具有试验设备轻便、对绝缘损伤小和易于发现设备的局部缺陷等优点。另一方面,根据前人研究表明,直流设备中的微粒由于受到单极性电场力的影响,运动活性非常大,极易贯穿气隙与高压电极碰撞从而引发放电击穿事故。因此,针对直流GIL/GIS设备,可设计直流老练程序,使之与驱赶电极和微粒陷阱间实现微粒主动式抑制的动态配合措施,更为有效地抑制金属微粒。
目前,交流气体绝缘设备已有相关规定的现场耐压测试步骤,因此本文首先依据《气体绝缘金属封闭输电线路现场交接试验导则》中规定的交流老练程序,如三阶或多阶升压法,拟定直流老练程序,如图12所示。为验证本文拟定的直流老练方法,在运动仿真模型中逐次施加电压等级,且每电压等级下均释放不同尺寸金属微粒。分析研究在不同电压等级下,不同微粒的运动轨迹规律。
在方案a中,当外施电压等级为25 kV时,半径为0.1、0.2 mm的微粒运动,其余半径大于0.2 mm的微粒均未能起始运动,如图13所示。
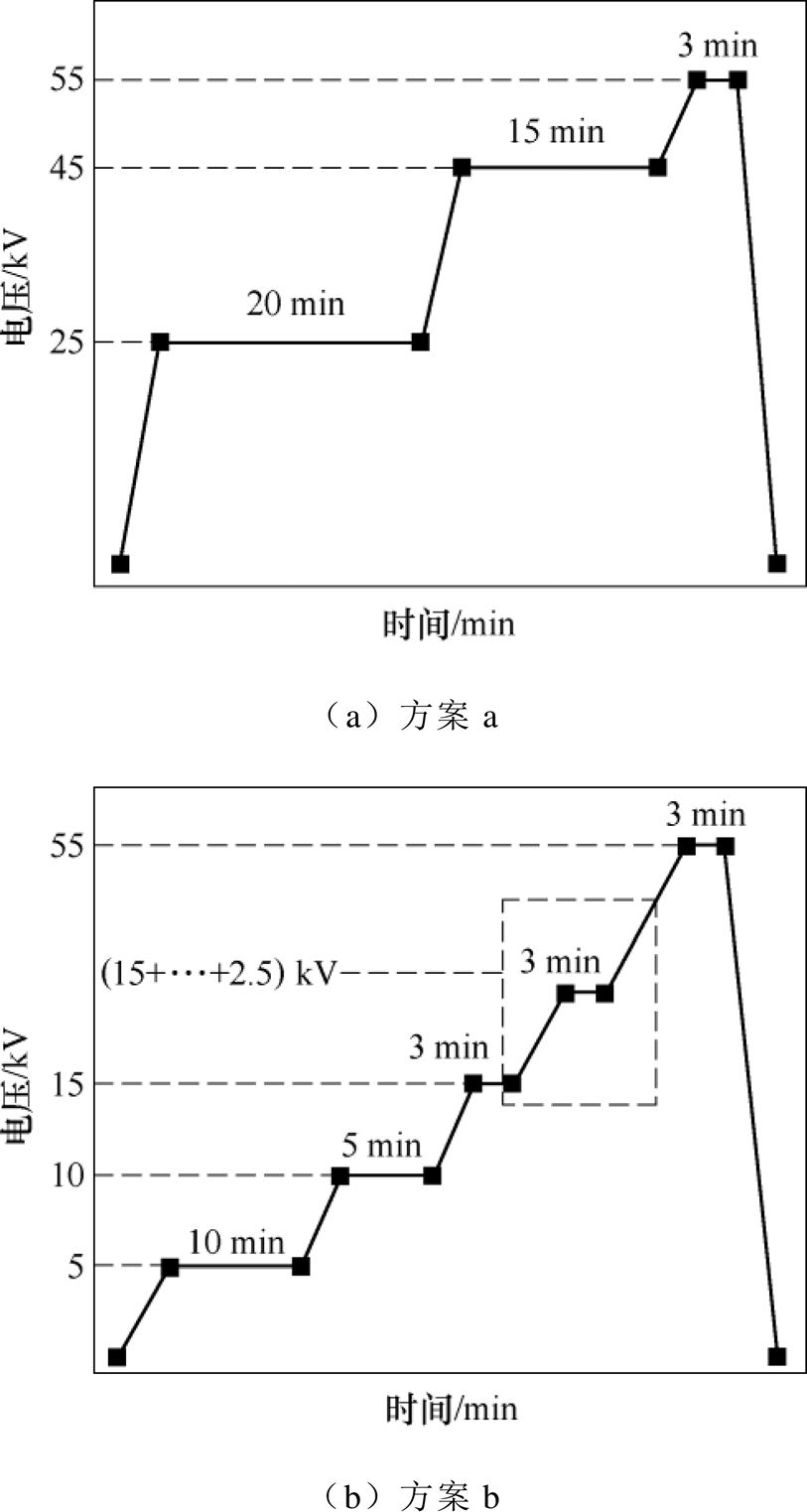
图12 基于传统老练程序拟定的直流老练方案
Fig.12 DC sophistication program based on traditional sophistication program
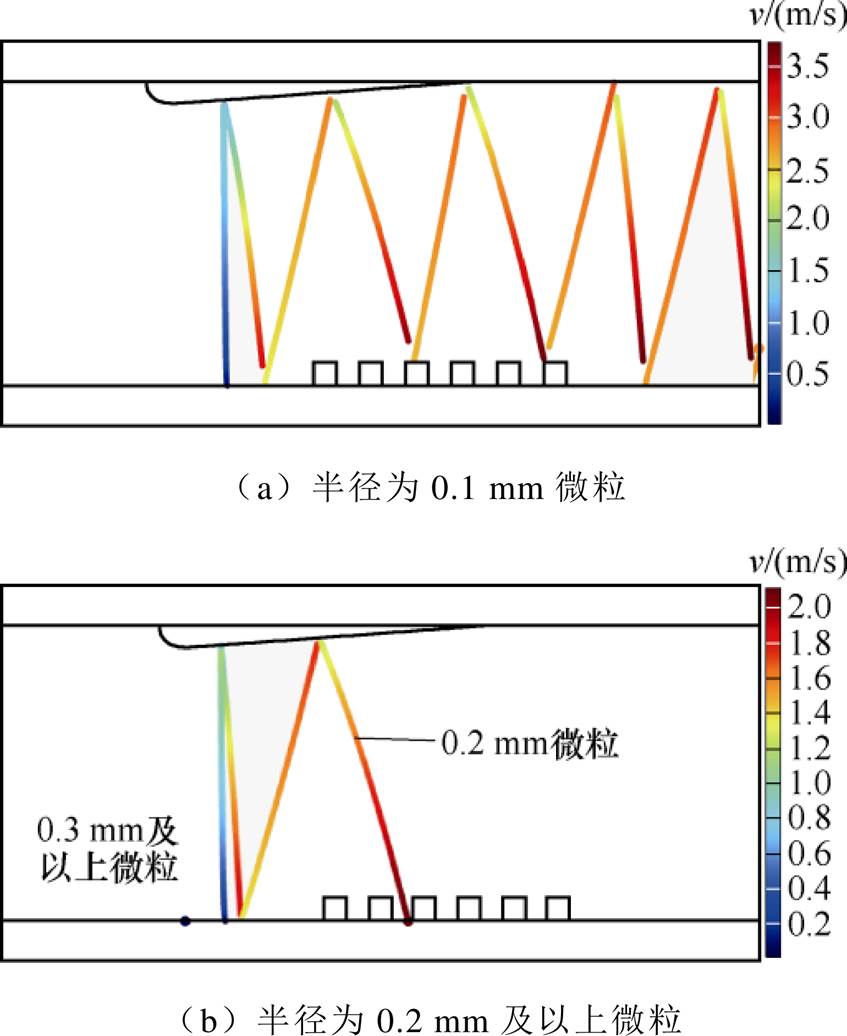
图13 电压等级为25 kV时不同尺寸微粒运动情况
Fig.13 Movement of particles of different sizes when the voltage level is 15 kV
由图13可知,在25 kV电压等级下只有半径为0.1、0.2 mm微粒启举,且只能有效抑制半径0.2 mm微粒。这是由于半径0.1 mm微粒的启举电压远小于25 kV,从而在此电压等级下其运动特性十分活跃,且与驱赶电极碰撞后其反射角很大,在100 ms内即容易脱离陷阱范围减小抑制效率,如图13a 所示。
在仿真研究中,当执行下一阶外施电压等级时,不再考虑上一阶外施电压等级下可启举运动的金属微粒。因此,当方案a的第二阶段外施电压等级为45 kV时,着重考虑半径大于0.2 mm的微粒。同理,在此电压等级下只可有效抑制半径为0.6、0.7 mm金属微粒,其余尺寸相对较小的微粒活性特大。此外,在系统中若不同尺寸多数微粒同时运动且活性非常大时,无疑增加了引发气隙击穿进而破坏设备绝缘强度的风险。
方案b的特点在于,在低电压等级加压时间很长,从15 kV开始每阶级逐步提升2.5 kV且保持3 min。虽然加压等级越多,对抑制不同尺寸微粒有一定的捕获效果,但加压阶段太多会存在“无效”的电压等级。比如由1.4.2节可知,当微粒尺寸相对较小时,其半径每增加0.1 mm所需启举电压跨度大。因此,通过仿真计算发现,甚至有连续两个加压等级(17.5、20 kV)是“无效”电压等级。
本文结合方案a、方案b中得出的结果,分析出以下规律:当电压等级小于某尺寸微粒的启举电压时,微粒将处于静止状态;当微粒在其启举电压附近运动时,首次碰撞驱赶电极或高压电极时,碰撞前的速度在1~1.2 m/s。然而,当尺寸相对较小的微粒在电压等级很高情况下启举时,其首次碰撞前的速度达到1.6 m/s以上,即运动状态非常活跃。因此,在某电压等级下,可抑制微粒启举电压在此电压等级附近的某尺寸微粒,但难以有效抑制尺寸较小的微粒。另一方面,老练程序也不一定要实行电压等级跨度很小的多阶程序,这样容易出现很多“无效”电压等级。
最后,本文基于以上微粒运动规律,提出直流老练程序的升压流程原则以及优化程序:根据1.4.2节中直流应力下金属微粒运动仿真中统计出的不同尺寸微粒的最佳驱动电场,以降低微粒活跃为原则,通过采用逐级升压法实现金属微粒的逐级捕获,如图14所示。
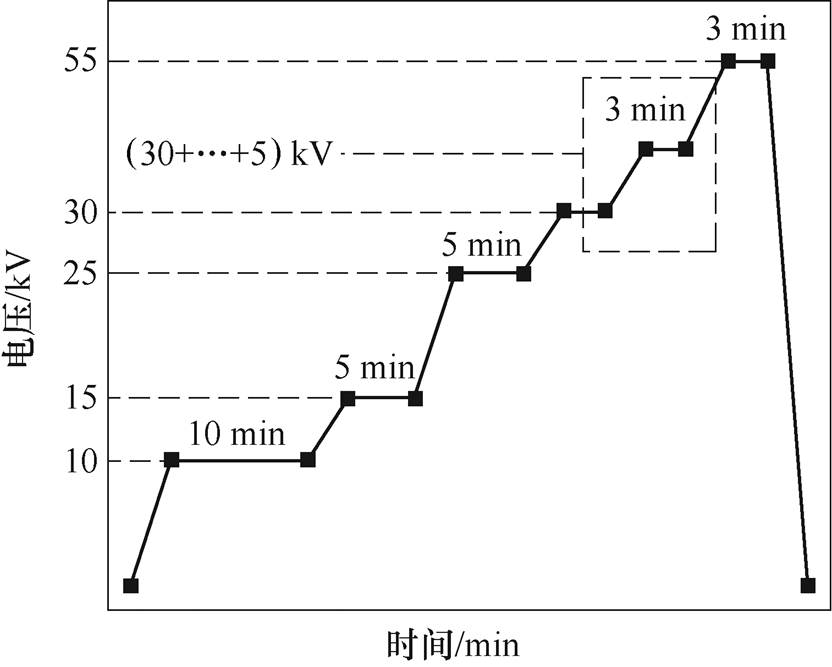
图14 优化后的直流老练逐级加压程序
Fig.14 Optimized DC sophisticated stepwise pressurization program
在优化程序中,10 kV电压等级下保持10 min是为了烧灼高压导体上存在的尖刺以及尺寸非常小的异物。图15为对比以上三种直流老练程序下陷阱对不同尺寸微粒的捕获率。由图15中捕获率曲线可得,对于尺寸相对较小的微粒而言,本文优化后的老练程序相比于传统程序可使陷阱捕获不同尺寸微粒的平均概率提升50 %以上。
本文搭建了与仿真模拟平台尺寸1 1的微粒主动式抑制的动态配合的平板电极模拟实验平台,如图16所示。其中将驱赶电极用导电胶黏在上电极板,在下电极板上平铺块状栅格陷阱,且在陷阱凹槽处涂粘胶。其次,将平板电极系统放置于可充放SF6气体的封闭式正方形铝合金腔体,且用气压表来检测SF6气体充放时的气压变化。腔体两侧设有石英玻璃密封,一侧利用高速相机(Fastec HiSpec5)观测金属微粒在电极间的运动;另一端则通过LED补光灯进行补光,实现高速相机对整个平板电极区域内的有效观测。直流电压由信号发生器(Agilent 33522A)产生后,经过高压放大器(Trek Model50/ 12A)放大5 000倍施加在腔体套管。平板电极系统中,上电极板连接套管的另一端;下电极板则通过腔体外壳实现接地。
1的微粒主动式抑制的动态配合的平板电极模拟实验平台,如图16所示。其中将驱赶电极用导电胶黏在上电极板,在下电极板上平铺块状栅格陷阱,且在陷阱凹槽处涂粘胶。其次,将平板电极系统放置于可充放SF6气体的封闭式正方形铝合金腔体,且用气压表来检测SF6气体充放时的气压变化。腔体两侧设有石英玻璃密封,一侧利用高速相机(Fastec HiSpec5)观测金属微粒在电极间的运动;另一端则通过LED补光灯进行补光,实现高速相机对整个平板电极区域内的有效观测。直流电压由信号发生器(Agilent 33522A)产生后,经过高压放大器(Trek Model50/ 12A)放大5 000倍施加在腔体套管。平板电极系统中,上电极板连接套管的另一端;下电极板则通过腔体外壳实现接地。
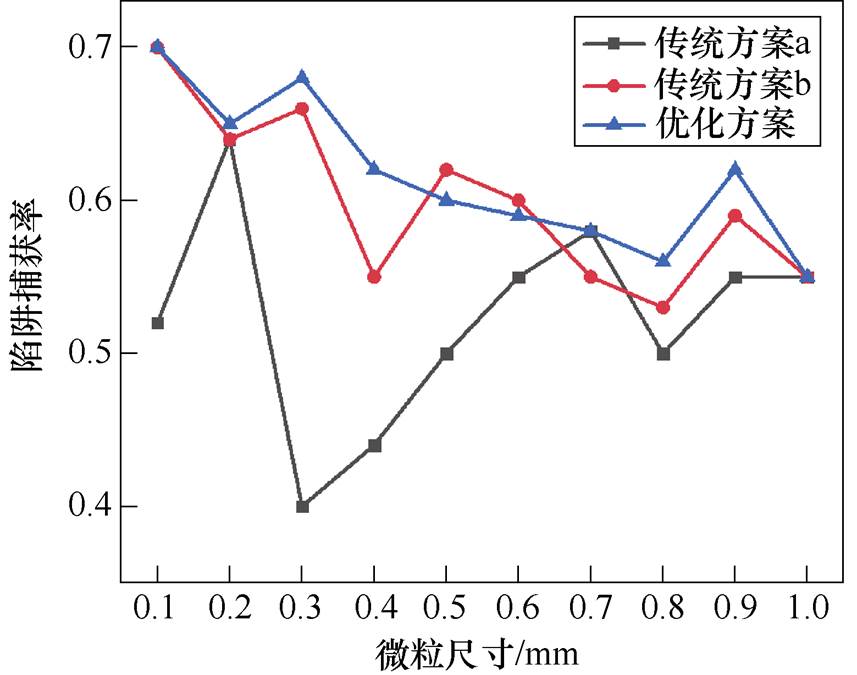
图15 三种直流老练程序下不同尺寸微粒的入陷率
Fig.15 Optimized DC sophisticated stepwise pressurization program
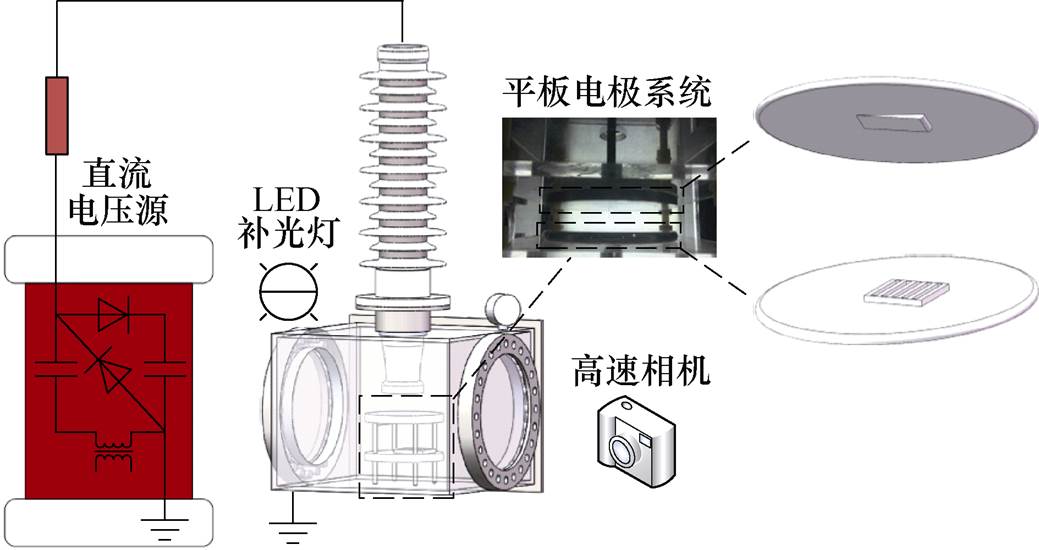
图16 平板电极微粒运动观测实验平台
Fig.16 Experimental platform for observing particle motion in plate electrode
本文选取半径分别为0.1、0.2、0.3、0.4、0.5和0.8 mm的球形铝制金属微粒各3颗,放置在平板电极的地电极上,按照第2节的优化后的直流老练程序对系统采取逐步加压的方法,使用函数信号发生器将加压速度控制在0.25 kV/s。反复5次实验来验证仿真结果的准确性,且每次实验前,为减少残余电荷量对金属微粒运动特性的影响,采用带有乙醇的丝绸擦拭两平板电极、驱赶电极和微粒陷阱表面,并采用离子风机消散、中和表面电荷,待乙醇挥发后进行下次实验。
依据2.3节中优化的直流老练程序,首先外施电压为10 kV时未发生任何现象,因为此电压等级是为了烧灼系统中尺寸非常小的异物,而且每次实验前均需要擦拭电极。其次当外施电压为15 kV时,由于多个金属微粒共同处于地电极表面的缘故,不仅半径0.1 mm微粒起始运动,还有部分半径0.2 mm微粒也有起始运动现象。微粒运动情况如图17所示,图17中,①和③为半径0.1 mm的微粒;②为半径0.2 mm微粒。在足够长的加压时间内,微粒在驱赶电极的强诱导作用下很快进入陷阱区域,且入陷后在粘胶的作用下不再出现二次逃逸的现象。但在运动状态③中,微粒与陷阱表面碰撞反弹后与高压电极碰撞时,其反射角极小,从而在轴向上的位移很小,即很难再离开陷阱区域从而被陷阱捕获。因此当外施电压为15 kV时,可有效抑制半径为0.1 mm的微粒。
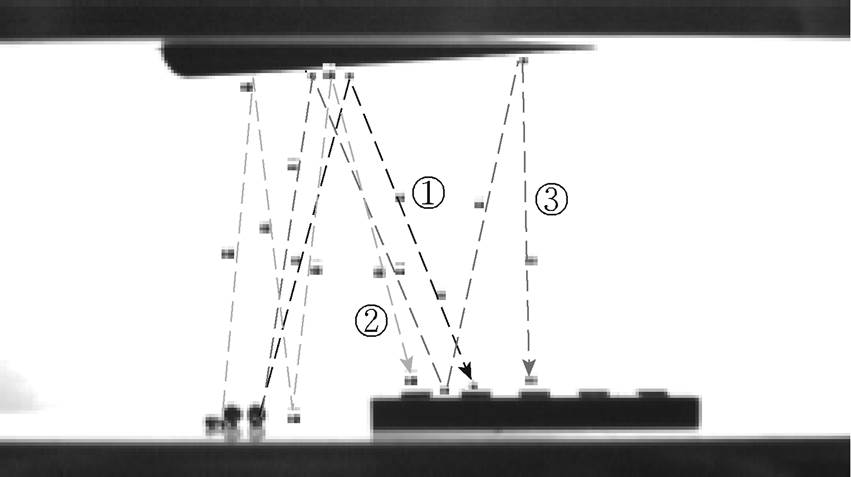
图17 外施电压15 kV时微粒运动情况
Fig.17 The movement of particles when the applied voltage is 15 kV
同样,每当外施电压施加新的电压等级后,可有效抑制相应尺寸的金属微粒,与仿真中的结果极为相似。然而在实验中,由于将多数金属微粒聚集在一处,微粒启举后的运动活性特别大,因此存在着特别极端情况。图18为当外施电压等级35 kV时,半径0.2 mm微粒启举后的运动轨迹,微粒在高电场强度的驱动下与驱赶电极碰撞后其反弹角度很大,很容易脱离陷阱区域。在无驱赶电极和陷阱区域,微粒在平板电极间碰撞过程中反射角极小,在轴向上位移很小,从而在平板电极中存在无数次的反复跳动的运动轨迹。最终,由于实验平台的有限而脱离实验区,或有概率重新进入陷阱区域被捕获,即此情况可验证在高电压等级下小尺寸微粒运动的仿真结果。
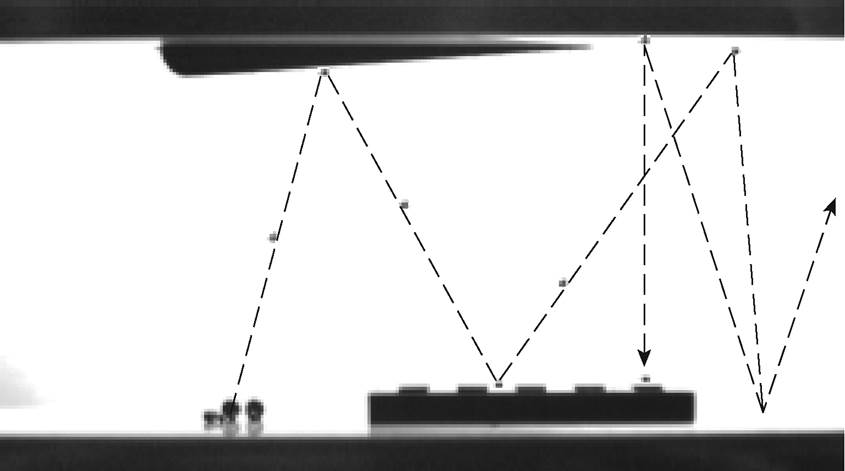
图18 外施电压35 kV下半径0.1 mm微粒的运动轨迹
Fig.18 The trajectory of particles with a radius of 0.1 mm under the voltage of 35 kV
从实验中也可得出,在直流老练程序和驱赶电极的强诱导作用下,微粒运动速度极快,即从进入陷阱区域入陷或脱离实验平台所需时间为ms级别。因此,本文拟定选用的直流老练程序的每电压等级所加时间足够长,可保证每电压等级下对应尺寸金属微粒捕获的成功率。同时,通过实验统计出有无驱赶电极情形下,不同尺寸金属微粒的捕获率如图19所示。
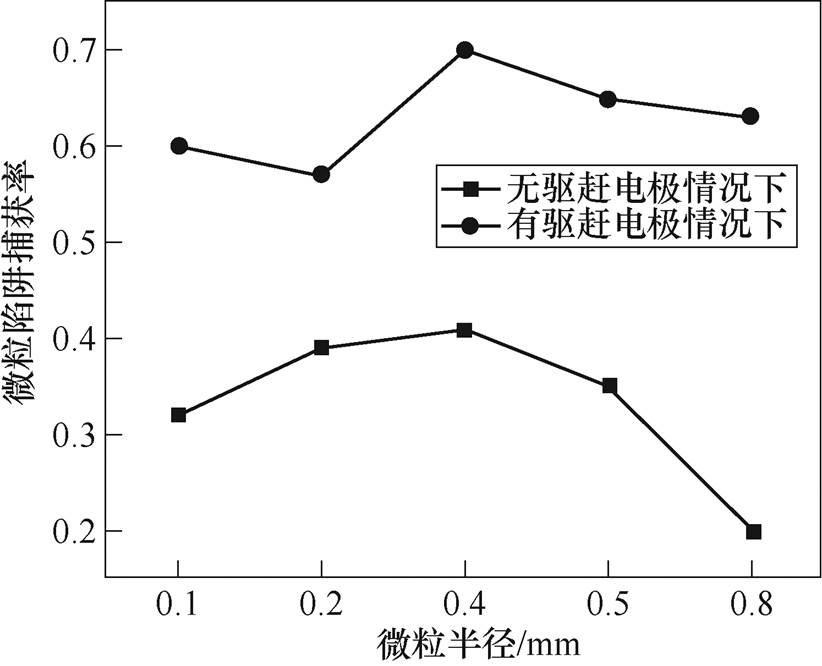
图19 不同尺寸金属微粒的捕获率
Fig.19 Capture rate of metal particles of different sizes
由此可得,实验中结果与仿真结果相差不大。然而实验中尺寸较小的金属微粒的捕获概率偏小,这是由于在实验中将多数金属微粒全都聚集于一处,微粒尺寸较小的运动活性非常大,从而逃出陷阱区域的概率大。但在实际现场应用场景中,很难遇见多数金属微粒聚集在一处的情况。此外,若在高压电极布置驱赶电极时,会使陷阱捕获不同尺寸微粒的平均概率提升50 %以上,即驱赶电极可有效阻挡金属微粒的运动方向,使其驱赶至陷阱区域,提高陷阱对微粒的捕获效率。
目前,将各种抑制微粒手段进行主动式动态配合设计是未来的发展趋势。本文采用仿真程序获取驱赶电极与微粒陷阱配合下抑制微粒的有效概率分布;同时提出直流老练优化程序,从而得到微粒主动式抑制的动态配合有效方案;最后实验验证了仿真结果的准确性,并且对比了有无驱赶电极情形下设备抑制金属微粒的能力。结合仿真和实验结果 表明:
1)当微粒与驱赶电极碰撞时,由于驱赶电极存在陡度以及很强的轴向电场,微粒将受阻挡和驱赶作用,从而在轴向上有概率反方向反弹的运动趋势;且当驱赶电极与陷阱间的距离为18 mm时,陷阱捕获率可高达70 %。
2)本文优化后的直流老练程序为:首先将电压逐步升高至10 kV保持10 min;然后逐步升高至15 kV保持5 min;再次逐步升高至25 kV保持5 min;最后将电压每次逐步提升5 kV保持3 min,直至升高到55 kV并保持3 min后将电压迅速降低至零。且与传统老练程序相比,使陷阱捕获不同尺寸微粒的性能可提升50 %以上。
3)最后依据仿真优化条件进行大量实验,验证了驱赶电极的有效性,同时发现向高压电极布置驱赶电极后,陷阱的捕获率可提高50 %以上。
因此,本文结果可进一步提升设备抑制金属微粒的能力,对提高直流GIL运行的安全可靠性具有重要意义。然而,从类轴向还是难以有效模拟实际GIL设备中微粒的运动特点,后续还需搭建更为贴切实际GIL的实验样机深入研究或优化主动式微粒抑制方法的动态配合方案。
参考文献
[1] 汤广福, 庞辉, 贺之渊. 先进交直流输电技术在中国的发展与应用[J]. 中国电机工程学报, 2016, 36(7): 1760-1771.
Tang Guangfu, Pang Hui, He Zhiyuan. R & D and application of advanced power transmission tech- nology in China[J]. Proceedings of the CSEE, 2016, 36(7): 1760-1771.
[2] 高克利, 颜湘莲, 刘焱, 等. 环保气体绝缘管道技术研究进展[J]. 电工技术学报, 2020, 35(1): 3-20.
Gao Keli, Yan Xianglian, Liu Yan, et al. Progress of technology for environment-friendly gas insulated transmission line[J]. Transactions of China Electro- technical Society, 2020, 35(1): 3-20.
[3] 王健, 李庆民, 李伯涛, 等. 直流应力下电极表面覆膜对金属微粒启举的影响机理研究[J]. 电工技术学报, 2015, 30(5): 119-127.
Wang Jian, Li Qingmin, Li Botao, et al. Mechanism analysis of the electrode-coating’s impact on the particle-lifting under DC voltage[J]. Transactions of China Electrotechnical Society, 2015, 30(5): 119-127.
[4] Hara M, Maeda Y, Nakagawa N, et al. DC breakdown voltage characteristics of saturated liquid helium in the presence of metallic particles[J]. IEEE Transa- ctions on Dielectrics and Electrical Insulation, 2006, 13(3): 470-476.
[5] 张连根, 路士杰, 李成榕, 等. GIS中线形和球形金属微粒的运动行为和危害性[J]. 电工技术学报, 2019, 34(20): 4217-4225.
Zhang Liangen, Lu Shijie, Li Chengrong, et al. Motor behavior and hazard of spherical and linear particle in gas insulated switchgear[J]. Transactions of China Electrotechnical Society, 2019, 34(20): 4217-4225.
[6] 张博雅, 张贵新. 直流GIL中固-气界面电荷特性研究综述Ⅱ: 电荷调控及抑制策略[J]. 电工技术学报, 2018, 33(22): 5145-5158.
Zhang Boya, Zhang Guixin. Review of charge accumulation characteristics at gas-solid interface in DC GIL, part Ⅱ: charge control and suppression strategy[J]. Transactions of China Electrotechnical Society, 2018, 33(22): 5145-5158.
[7] Iwabuchi H, Matsuoka S, Kumada A, et al. Influence of tiny metal particles on charge accumulation phenomena of GIS model spacer in high-pressure SF6 gas[J]. IEEE Transactions on Dielectrics and Elec- trical Insulation, 2013, 20(5): 1895-1901.
[8] Wang Jian, Hu Qi, Chang Yanan, et al. Metal particle contamination in gas-insulated switchgears/gas-insulated transmission lines[J]. CSEE Journal of Power and Energy Systems, 2019, 7(5): 1011-1025.
[9] Sarathi R, Giridhar A V, Mani A, et al. Investigation of partial discharge activity of conducting particles in liquid nitrogen under DC voltages using UHF technique[J]. IEEE Transactions on Dielectrics and Electrical Insulation, 2008, 15(3): 655-662.
[10] 汪佛池, 杨磊, 曹东亮, 等. 直流GIL中球状自由导电微粒的运动及陷阱抑制[J]. 高电压技术, 2018, 44(10): 3141-3149.
Wang Fochi, Yang Lei, Cao Dongliang, et al. Motion and trap suppression of spherical free conducting particles in DC GIL[J]. High Voltage Engineering, 2018, 44(10): 3141-3149.
[11] 王健, 常亚楠, 王靖瑞, 等. 基于捕捉效用分析的直流GIL微粒陷阱设计与参数优化[J]. 中国电机工程学报, 2020, 40(15): 5050-5061.
Wang Jian, Chang Yanan, Wang Jingrui, et al. Design and optimization of particle traps in DC GIL based on the capture effect analysis[J]. Proceedings of the CSEE, 2020, 40(15): 5050-5061.
[12] Dale S J, Hopkins M D. Methods of particle control in SF6 insulated CGIT systems[J]. IEEE Transactions on Power Apparatus and Systems, 1982, PAS-101(6): 1654-1663.
[13] 李庆民, 常亚楠, 王健, 等. 气体绝缘输电管道微粒陷阱设计技术研究进展[J]. 高电压技术, 2020, 46(12): 4182-4193.
Li Qingmin, Chang Yanan, Wang Jian, et al. Metho- dological advances of metal particle traps design in gas insulated transmission lines[J]. High Voltage Engineering, 2020, 46(12): 4182-4193.
[14] 汤浩, 吴广宁, 范建斌, 等. 直流气体绝缘输电线路的绝缘设计[J]. 电网技术, 2008, 32(6): 65-70.
Tang Hao, Wu Guangning, Fan Jianbin, et al. Insu- lation design of gas insulated HVDC transmission line[J]. Power System Technology, 2008, 32(6): 65-70.
[15] Hasegawa T, Yamaji K, Hatano M, et al. Develop- ment of insulation structure and enhancement of insulation reliability of 500kV DC GIS[J]. IEEE Transactions on Power Delivery, 1997, 12(1): 194- 202.
[16] 范建斌, 李鹏, 李金忠, 等. ±800kV特高压直流GIL关键技术研究[J]. 中国电机工程学报, 2008, 28(13): 1-7.
Fan Jianbin, Li Peng, Li Jinzhong, et al. Study on key technology of ±800kV UHVDC GIL[J]. Proceedings of the CSEE, 2008, 28(13): 1-7.
[17] 刘泽洪, 韩先才, 黄强, 等. 长距离、大容量特高压GIL现场交流耐压试验技术[J]. 高电压技术, 2020, 46(12): 4172-4181.
Liu Zehong, Han Xiancai, Huang Qiang, et al. Field AC withstand voltage test technology of long distance and large capacity UHV GIL[J]. High Voltage Engineering, 2020, 46(12): 4172-4181.
[18] 鲁加明, 曹伟伟, 周振华. 550kV GIL母线的结构设计[J]. 电气技术, 2015, 16(9): 59-63.
Lu Jiaming, Cao Weiwei, Zhou Zhenhua. The structural design of 550kV GIL bus[J]. Electrical Engineering, 2015, 16(9): 59-63.
[19] 黎斌. SF6高压电器设计[M]. 4版. 北京: 机械工业出版社, 2015.
[20] 孙秋芹, 罗宸江, 王峰, 等. 直流GIL导体表面金属颗粒跳跃运动特性研究[J]. 电工技术学报, 2018, 33(22): 5206-5216.
Sun Qiuqin, Luo Chenjiang, Wang Feng, et al. Jumping characteristics of metal particle on the surface of DC gas insulated transmission line conductor[J]. Transactions of China Electrotechnical Society, 2018, 33(22): 5206-5216.
[21] 吕中杰, 黄风雷. 圆板非弹性冲击过程的碰撞恢复系数[J]. 北京理工大学学报, 2008, 28(4): 283-286.
Lü Zhongjie, Huang Fenglei. Coefficient of resti- tution of a circular plate during inelastic collision[J]. Transactions of Beijing Institute of Technology, 2008, 28(4): 283-286.
[22] Hara M. Particle-triggered breakdown mechanism in the presence of DC and AC electrical gradient forces in atmospheric air[C]//11th International Symposium on High-Voltage Engineering (ISH 99), London, UK, 1999: 47-50.
[23] 贾江波, 陶风波, 杨兰均, 等. GIS中不均匀直流电场下球状自由导电微粒运动分析[J]. 中国电机工程学报, 2006, 26(8): 106-111.
Jia Jiangbo, Tao Fengbo, Yang Lanjun, et al. Motion analysis of spherical free conducting particle in non-uniform electric field of GIS under DC voltage[J]. Proceedings of the CSEE, 2006, 26(8): 106-111.
[24] 国家能源局. DL/T 304-2011 气体绝缘金属封闭输电线路现场交接试验导则[S]. 北京: 中国电力出版社, 2011.
Abstract Free metal particles are more active in DC gas-insulated metal enclosed transmission lines (GIL) than in AC GIL, posing a severe challenge to the technical development and application of DC GIL. At present, active dynamic coordination of various particle suppression methods is the future trend.
In order to further improve the effectiveness of metal particle suppression in DC GIL, firstly, a simulation model of the cooperation between the driving electrode and the particle trap is established, and the position cooperation effect between the driving electrode and the trap is optimized. When the high voltage electrode is arranged with a driving electrode, it significantly reduces the lift-off voltage of the metal particles while blocking the movement of the particles in two ways: (1) When the particles collide with the driving electrode, the particles have difficulty in overcoming shear deformation and friction energy on the tangential side due to the steepness of the driving electrode's circular surface; (2) The existence of an axial electric field on the sloping surface of the driving electrode causes the particles to be subjected to an electric field force in the opposite direction to the axial movement. Therefore, the particles are repelled and blocked by the driving electrode and have a probability of bouncing in the opposite direction on the axis toward the trap area. The simulation model uses the field strength design reference E0ofgas-insulated equipment and the trap capture rate as the boundary condition and objective function, respectively, and obtains the best capture efficiency of 70 % when the position between the driving electrode and the trap is 18 mm. Secondly, the DC withstand voltage test has a special role in detecting certain local defects in the insulation compared to the AC withstand voltage test, and particles in DC equipment can easily penetrate the air gap and collide with the high voltage electrode to cause a discharge breakdown accident. Therefore, for DC GIS/GIL equipment, an optimized design of the DC ripening program, as shown in Fig.A1, has been developed to enable dynamic coordination measures with the driving electrodes and particle traps to suppress metal particles more effectively.
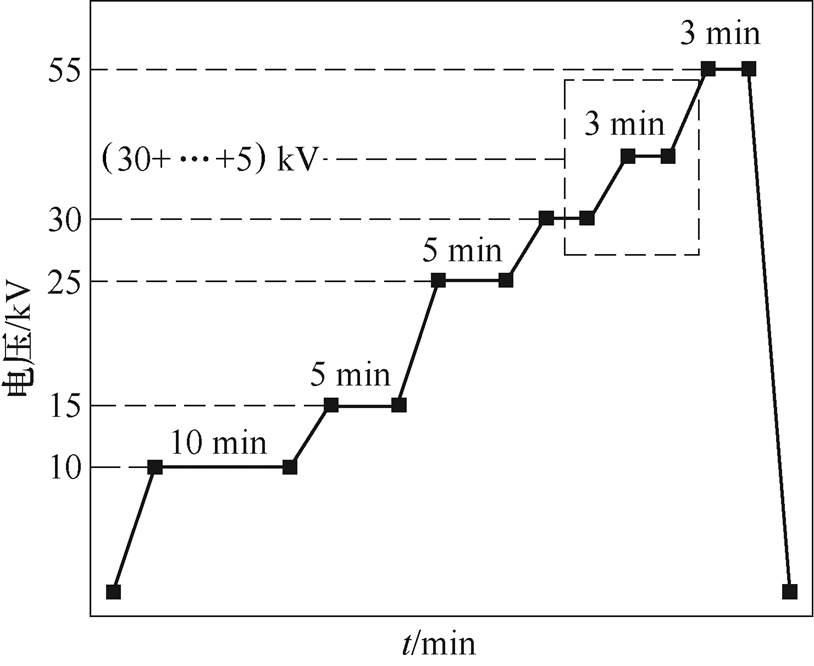
Fig.A1 Optimized DC sophisticated stepwise pressurization program
Finally, observation tests of particle motion with the cooperation of the driving electrodes, the traps, and the DC ripening program were carried out. The reliability of the simulation optimization results was verified. Experiments have shown that the trap capture rate can be increased by more than 50 % after the high electrode placement of the driving electrode. That is, the driving electrode can effectively block the movement direction of the metal particles, so that they can be driven into the trap area to improve the trap capture efficiency for particles. Therefore, the results can further improve the ability of equipment to suppress metal particles, which is of great significance in improving the safety and reliability of DC GIL operation.
keywords:DC gas insulated metal enclosed transmission lines (GIL), metal particle suppression, driving electrode, particle trap, DC sophisticated program, dynamic coordination
DOI: 10.19595/j.cnki.1000-6753.tces.220453
中图分类号:TM85
国家自然科学基金(52177140)和北京市自然科学基金(L201018)资助项目。
收稿日期 2022-03-27
改稿日期 2022-07-16
王 健 1985年生,副教授,博士生导师,研究方向为直流装备绝缘、先进绝缘材料。E-mail: wangjian31791@ncepu.edu.cn
李庆民 男,1968年生,教授,博士生导师,研究方向为高电压与绝缘技术、放电物理等。E-mail: lqmeee@ncepu.edu.cn(通信作者)
(编辑 郭丽军)