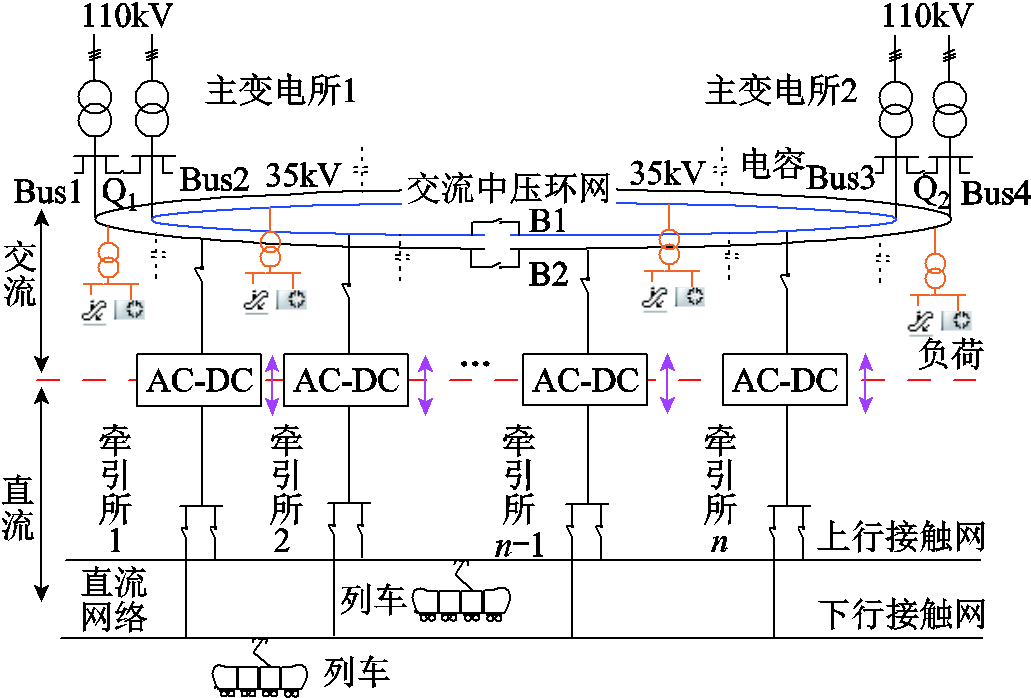
图1 柔性牵引供电系统典型拓扑
Fig.1 The topology of flexible traction power systems
摘要 针对传统牵引供电系统存在的列车再生能量利用不充分、直流供电波动大、交流网功率因数偏低等问题,提出一种引入双向变流器的柔性牵引供电系统方案。介绍了柔性牵引供电系统的几种典型工作模式,以及其中双向变电所的实现方案。研究了双向变流器的建模、直流特性优化、分散式无功补偿等关键技术,提出柔性供电系统分层控制结构,实现对交直流混合系统的柔性控制。建立城轨柔性供电系统仿真模型,并对典型应用场景下系统功能和性能进行仿真,实现了系统的综合优化。
关键词:城市轨道交通 柔性 牵引供电 混合 节能
城市轨道交通牵引供电系统主要包括主变电所、中压环网、牵引变电所、直流接触网等部分,将三相交流电转换为直流电,通过接触网供给列车使用[1]。其中,牵引变电所承担着交流变直流的关键作用,目前主要采用12脉波或24脉波的二极管整流机组[2-3]。二极管整流机组的优点是简单、可靠、成本低,缺点是能量单向流动、不可控。以二极管整流机组为核心构建的牵引供电系统存在如下显著缺点:
1)列车再生制动能量无法充分利用。列车再生制动能量只能在直流网内流动,如有盈余只能通过制动电阻消耗掉,造成能量的巨大浪费,导致隧道环境温升加剧,增加环控系统负担,引起二次耗能[4-5]。
2)直流接触网电压波动范围大。由于二极管整流机组输出不可控,变压器漏感、二极管压降、线路阻抗等因素的存在会导致变电所输出电压随着列车运行工况的变化产生较大波动,这一方面对列车的安全稳定运行不利,另一方面也限制了供电距离。
3)中压环网夜间功率因数偏低。在非高峰时段或夜间休车时段,牵引负荷很小,大量电缆的等效电容产生的无功功率使得主变电站功率因数大大降低,严重时功率因数仅有0.4左右,严重低于电力部门规定的功率因数限值。
针对上述问题,近年来提出了多种解决方案。文献[6]引入逆变器,将列车多余制动能量反馈到交流电网,实现能量再利用,起到较好的节能效果,但是设备仅在列车制动的时间段内运行,大部分时间处于待机状态,设备利用率偏低。文献[7]采用储能装置,列车制动时吸收能量,列车牵引时释放能量,不仅起到节能作用,还能在一定程度上稳定直流网压,但是储能设备通常安装空间占用大、寿命短,且价格昂贵,投资回收期长。文献[8]针对低峰时段交流系统功率因数低的问题,在主变电所增设专用无功补偿装置(Static Var Generator, SVG),进行集中补偿,但是设备需占用安装空间,且噪声、发热等问题突出。
值得注意的是,上述解决方案虽然都能在一定程度上解决各自问题,但缺乏全系统综合考虑,不仅会导致系统设备种类繁多、结构复杂、可靠性降低,并且设备投资及后期维护维修费用也会显著增加。文献[9]提出了在分布式电网中利用光伏发电进行分散式无功补偿,提升了设备利用率;文献[10]提出对分散式无功补偿进行损耗优化,减小了交流系统的线路损耗;文献[11]提出在多端柔性直流输电系统采用下垂控制实现负荷分配,并对电压控制参数进行优化,实现系统经济运行,为牵引供电系统优化运行提供了参考。
研究表明,传统牵引供电系统存在上述诸多问题的根源在于牵引变电所中二极管整流机组的单向能量传输特性和不可控性。二极管整流机组成为交流中压环网和直流接触网之间能量双向自由流通的重大阻碍,并且无法对交流侧功率因数、直流侧电压进行调节和控制。为此,本文引入大容量双向变流器,将传统牵引变电所升级为双向变电所,并在此基础上构建柔性牵引供电系统,具体方案如图1所示,其中Bus1~Bus4为与主变电所变压器相连的交流母线,B1、B2、Q1、Q2为母线联络开关。从图1可知,整个供电系统分为交流网络和直流网络两大部分,双向变电所实现二者之间的双向连接,在交流和直流网络之间的能量传输完全可控。
图1 柔性牵引供电系统典型拓扑
Fig.1 The topology of flexible traction power systems
1)交流网络
交流网络部分包括2个主变电所和4段交流母线。每个主变电所设置2台主变压器,由不同的外电源供电,保证可靠性。每台主变压器带一段中压交流母线。正常情况下4段交流母线独立运行,在发生故障时,根据故障点的不同,可以通过母线联络开关实现对失电母线支援供电,保证整个系统的供电可靠性。所有牵引变电所及动力负荷均匀交替地连接到各段中压交流母线上,尽可能保证各母线负荷的平衡。其中,平衡性一方面是能量的平衡性,更重要的是功率平衡性。
2)直流网络
直流网络部分包括接触网、钢轨(回流轨)、列车等。所有双向变电所同时为接触网供电,构成一个多电源直流网络。当单个双向变电所故障时,可以通过断路器实现故障隔离,不影响直流供电安全。考虑到接触网和钢轨阻抗的存在,以及列车存在牵引、惰行、制动等多种工况且随时间位置发生变化,使得直流网络的功率潮流具有明显的时变性和不均衡性。这也是有别于传统直流微网的最显著的特征。因此,双向变电所应采取特殊的控制措施,应对列车快速起动或停止对系统造成的不利影响。
下面对柔性牵引供电系统的工作模式及功能进行介绍。为了简化分析,仅以1个主变电所、2段交流母线、2个双向变电所为例。
1.2.1 列车牵引时
列车牵引时,双向变电所为列车提供牵引能量,并且可以通过控制稳定直流电压,同时使变电所输出功率Prec1、Prec2尽可能均衡,降低单段交流母线的最大功率需求,如图2所示。
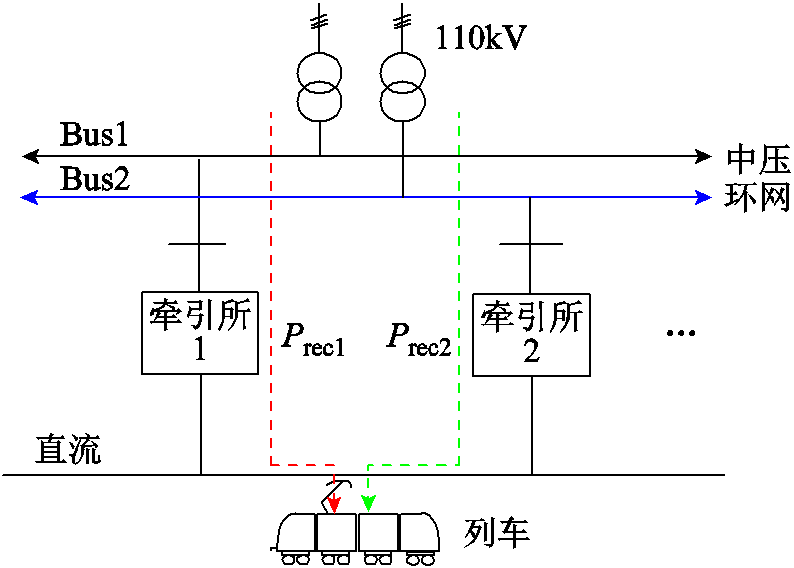
图2 牵引工况示意图
Fig.2 Traction condition diagram
1.2.2 列车制动时
列车制动时,不能被列车相互吸收的多余制动能量将被双向变电所反馈到中压交流电网,供两段母线上的负荷1和负荷2利用,如图3所示,Pinv为列车的制动功率。考虑到列车瞬时峰值制动功率Pbmax较大(4~6MW),大于负荷1及负荷2,所以从提高能量利用率的角度,应通过控制将列车制动能量比较均衡地反馈到两段交流母线上。

图3 制动工况示意图
Fig.3 Breaking condition diagram
1.2.3 低峰时段
利用双向变电站实现对线缆电容的分散式无功补偿Q1、Q2,保证主变电所进线点高功率因数,如图4所示。其中重点研究分散式无功补偿方案,以及双向变电所有功、无功容量之间的动态分配问题。
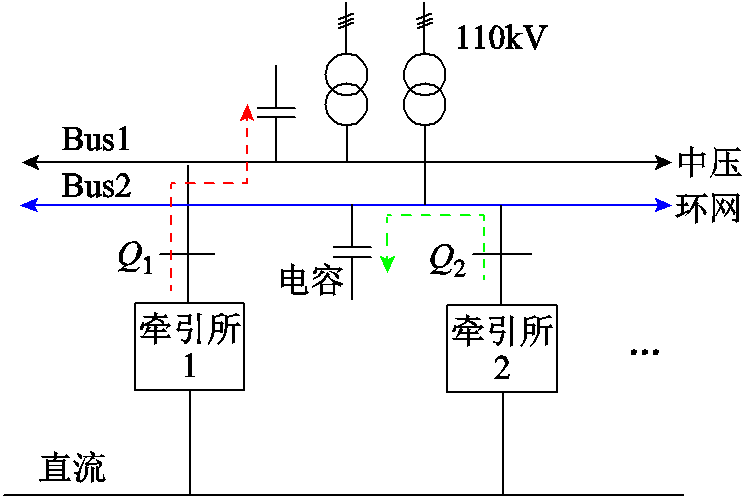
图4 无功补偿工况示意图
Fig.4 Reactive power compensation condition diagram
双向变电所是构建柔性牵引供电系统的关键。本文提出了三种可能的主电路拓扑方案,并从可靠性、安装空间、可控性等角度进行了对比。
1.3.1 独立新增方案
独立新增方案是指保持原来二极管整流机组不变(由两个12脉波构成的24脉波机组),额外新增一套双向变流机组,如图5所示。本方案比较稳妥可靠,但是安装空间要求较大。
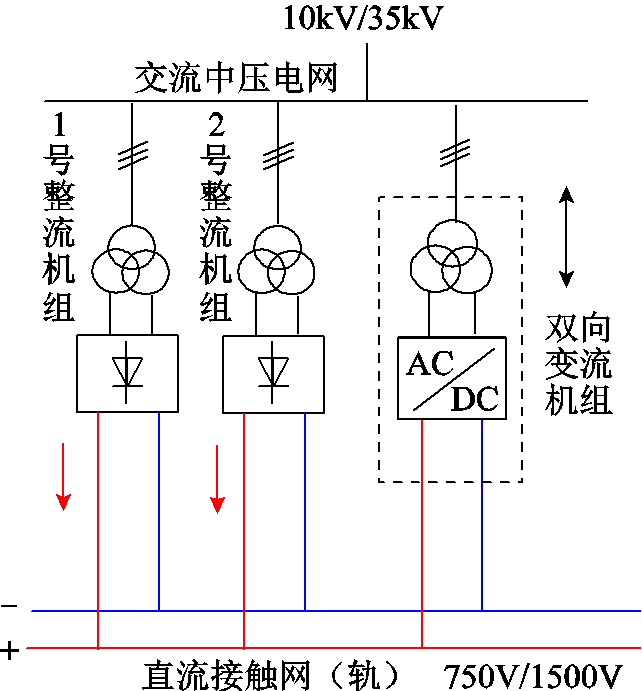
图5 独立新增方案
Fig.5 Independent new scheme
1.3.2 部分替代方案
部分替代方案是指用一套等容量的双向变流机组替代原来的一套12脉波整流机组,使得剩余的一套12脉波整流机组与双向变流机组并联运行,如图6所示。本方案不增加安装空间,但是对双向变流机组的可靠性和过载能力提出较高要求。
1.3.3 纯双向变流方案
纯双向变流方案是指去掉原来的整流机组,取而代之的是两套等容量的双向变流机组,如图7所示。本方案对双向变流机组的可靠性和过载能力要求最高、设备投资大,但是直流稳压效果及可控性最强。
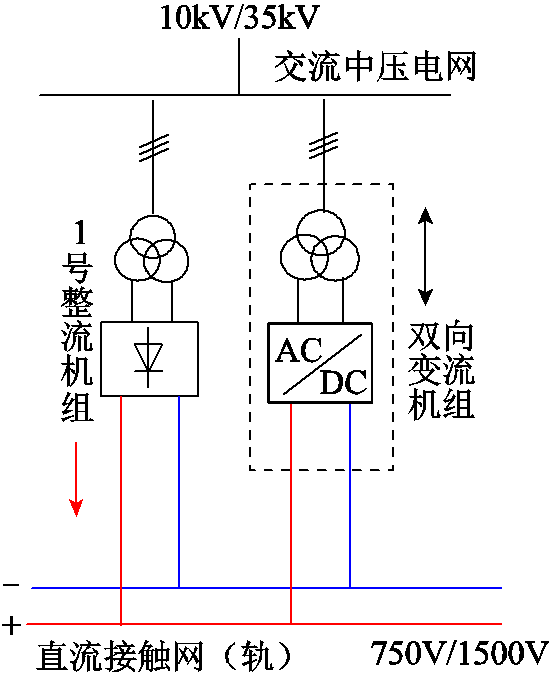
图6 部分替代方案
Fig.6 Partial alternative scheme
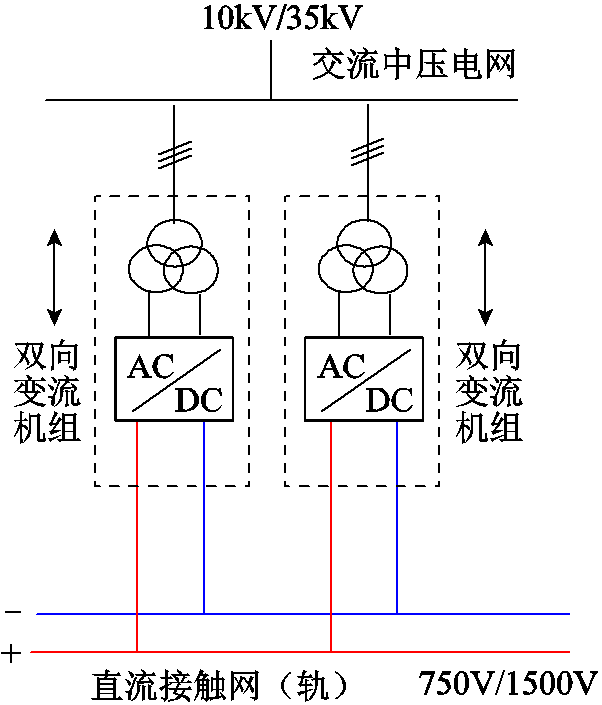
图7 纯双向变流方案
Fig.7 Entire bidirectional flow scheme
为了实现对系统有功和无功潮流的调控,实现交流系统的高功率因数,直流系统的高供电品质,以及整个系统的优化节能,本文提出了基于最优潮流的分层控制结构,如图8所示。
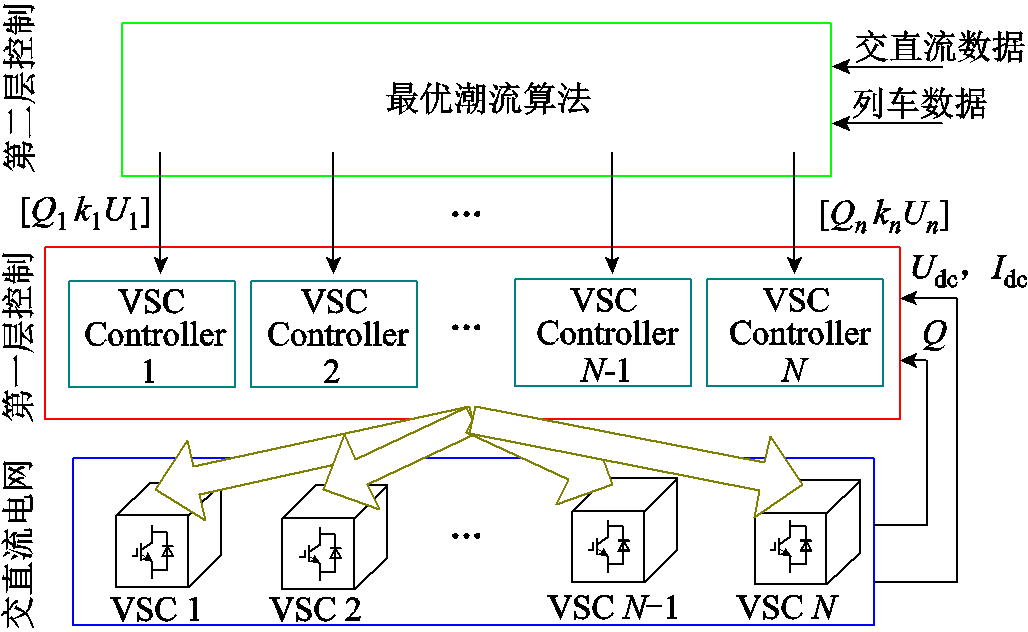
图8 分层控制结构
Fig.8 Hierarchical control structure
系统分为两层:第一层控制位于牵引变电所,作用为跟踪直流电压和无功补偿指令,在运营期间实现系统能耗最小的直流电压控制策略,非运营期间实现系统线路损耗最小的高功率因数分散式无功补偿;第二层控制为优化层,位于控制中心,通过最优潮流算法进行离线优化,得到每个牵引变电所的直流电压和无功补偿指令,通过光纤通信发送到牵引变电所。
双向变流器拓扑结构如图9所示,L为交流滤波电感,C为直流电容,Udc为直流电压,Idc为负荷电流,ea、eb、ec为三相交流网侧电压。

图9 双向变流器拓扑结构
Fig.9 Topology o f bidirectional converter
图10所示为双向变流器等效电路,其中,交流侧可以等效为电压源Uci∠δci,经变压器并入交流电网,直流侧恒压区等效为电压源U0,Ytci=Gtci+jBtci为变压器和滤波电感等效阻抗,逆变器注入交流电网功率为Ssci=Psci+jQsci。
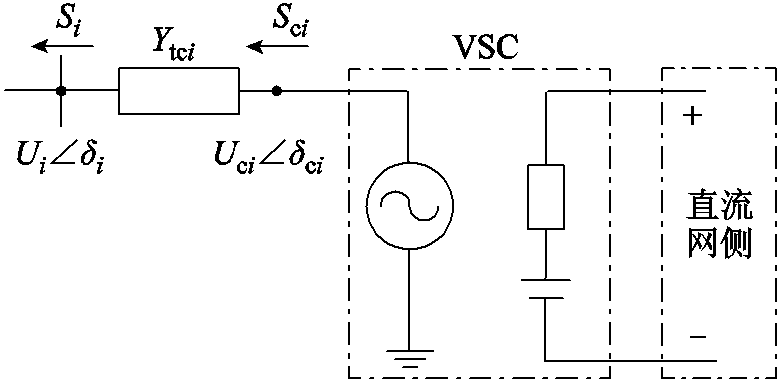
图10 双向变流器等效电路
Fig.10 Equivalent circuit of bidirectional converter
双向变流器注入功率[12]为
 (1)
(1)
 (2)
(2)
式中,N为交流节点数;Pi、Qi分别为牵引所注入交流节点i的有功功率和无功功率,对于不连接二极管整流器和中压能馈装置的交流节点i, Pi, Qi=0;Yij=Gij+jBij为交流节点导纳矩阵中第i行第j列元素。
2.2.1 第一层控制
在第一层控制中,双向变流器控制系统采用双闭环前馈解耦控制,分为直流电压下垂控制、无功功率控制和电流控制三部分。电压闭环作用是控制直流电压,实现再生制动功率的最优分配;无功功率闭环实现线路损耗最小的分散式无功补偿;电流内环的作用是按电压外环输出的电流指令控制电流,双向变流器控制系统如图11所示。
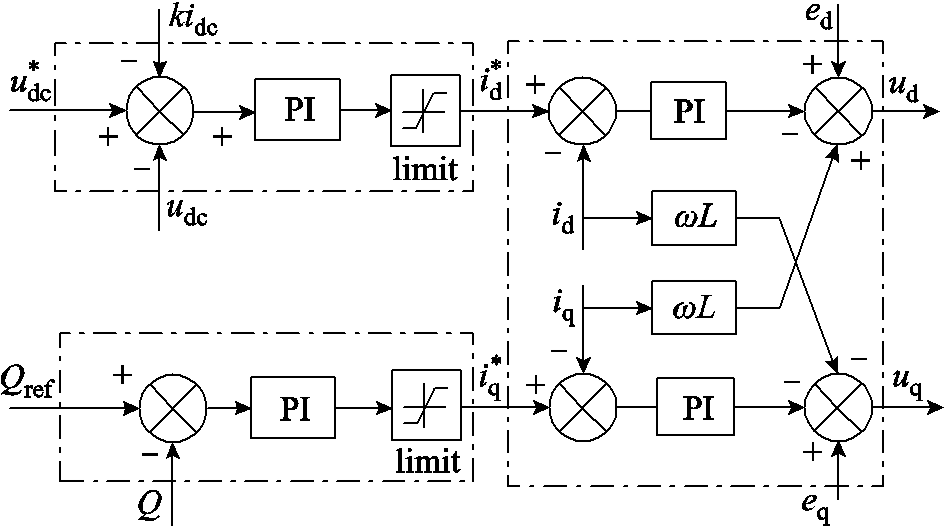
图11 双向变流器控制系统
Fig.11 Bidirectional converters control system
1)直流电压下垂控制
在牵引供电系统中,当列车处于制动模式时,双向变流器通常采用恒压控制,如图12a所示,但是这种方法导致再生制动能量大部分被最近的变电所吸收,不利于多个变电站之间的再生制动功率均分,可能导致再生能量不能被交流侧负荷充分利用而返送到110kV交流电网的主变电所中。这将增加系统能耗,并且可能会受到电网公司的限制。
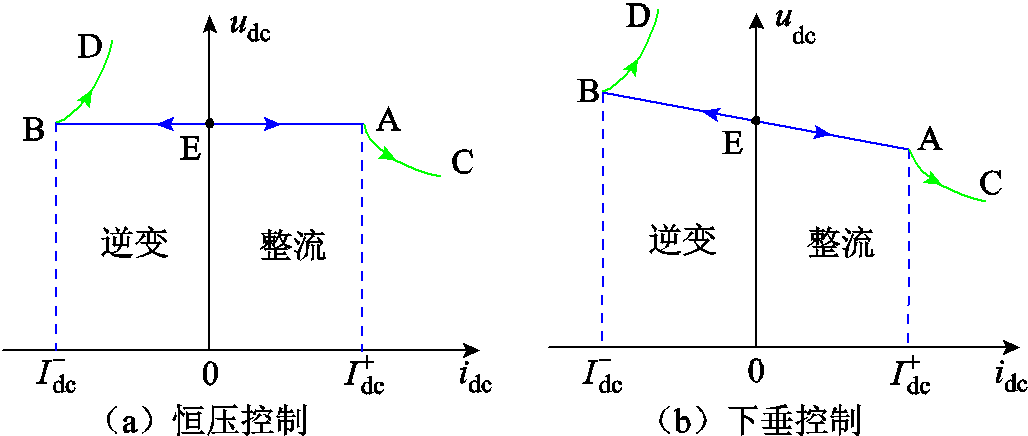
图12 直流电压特性
Fig.12 DC voltage characteristics
在电网运行过程中,功率总是趋向于从高压侧流向低压侧,通常采用直流电压信号作为控制变量,对直流潮流进行控制。为了实现多个变流器的功率均分,本文引入了下垂控制,如图12b所示,其原理是随着输出电流的增加,线性地降低电压参考来实现功率分配,这样多个变流器可以同时参与调节直流电压并实现功率均分。因此,在牵引供电系统中引入直流电压下垂控制可以改善制动能量分配,更好地被交流负荷吸收,减少向主变电所返送电量[13]。
在恒压控制下再生制动功率大部分由最近的变电所吸收,这样大部分能量只能反馈到一段母线,不能被利用的能量会返送到110kV电网;而在下垂控制方式下,多个变电所通过电压调节实现功率更加平均的分配,可以使再生能量被两段母线上的交流负荷所利用,减少返送回110kV主变电所的电量,能量流动示意图如图13所示。
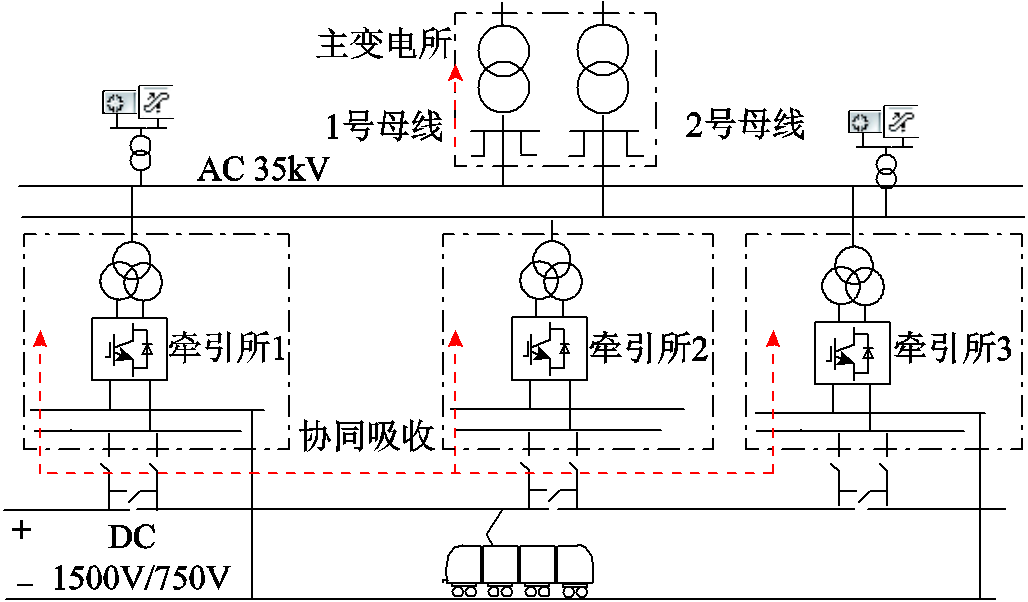
图13 协同吸收能量流动示意图
Fig.13 Energy flow of cooperative absorption scheme
2)分散式无功补偿
由于交流供电系统大量采用电力电缆线路,会产生容性无功功率[15],在供电系统轻载情况下,系统功率因数偏低,提出利用双向变流器在各牵引变电所进行分散式无功功率补偿的技术方案,如图14所示,从而替代主变电所静止SVG,节约设备投资成本。
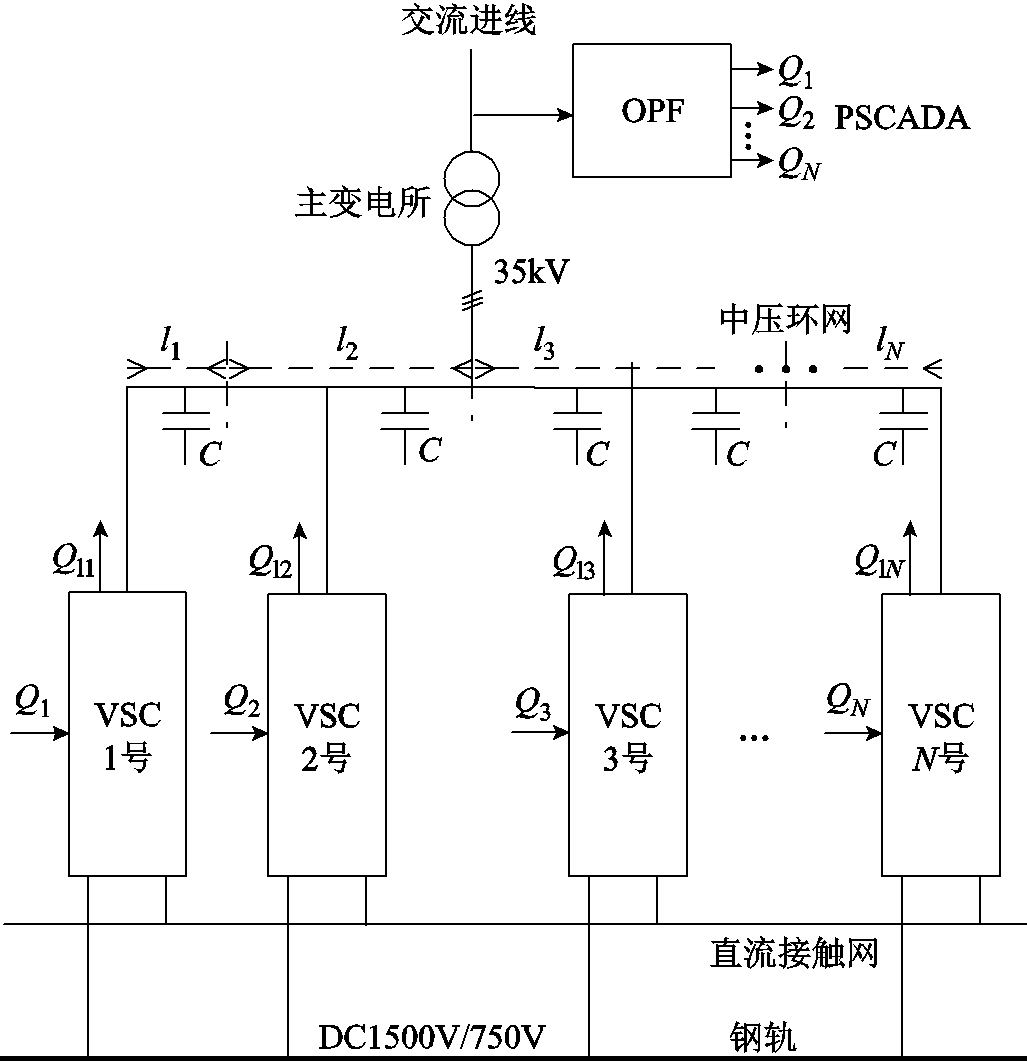
图14 分散式无功补偿方案
Fig.14 Distributed reactive compensation scheme
2.2.2 第二层控制
牵引变电所控制参数会影响交直流系统的潮流,为了实现系统经济运行,在第二层控制中引入最优潮流(Optimal Power Flow, OPF)算法[14],其流程如图15所示。其中柔性供电系统交直流稳态仿真主要包括:列车运行模拟和交直流潮流模拟仿真,如图16所示。列车运行模拟考虑了列车参数、路线数据、速度限制、驾驶策略和时间表。然后,可以计算每列车的功率和实时位置,并将其用作系统潮流仿真的输入数据。潮流仿真根据牵引供电系统的稳态模型计算获得系统中每个节点的电压和电流。
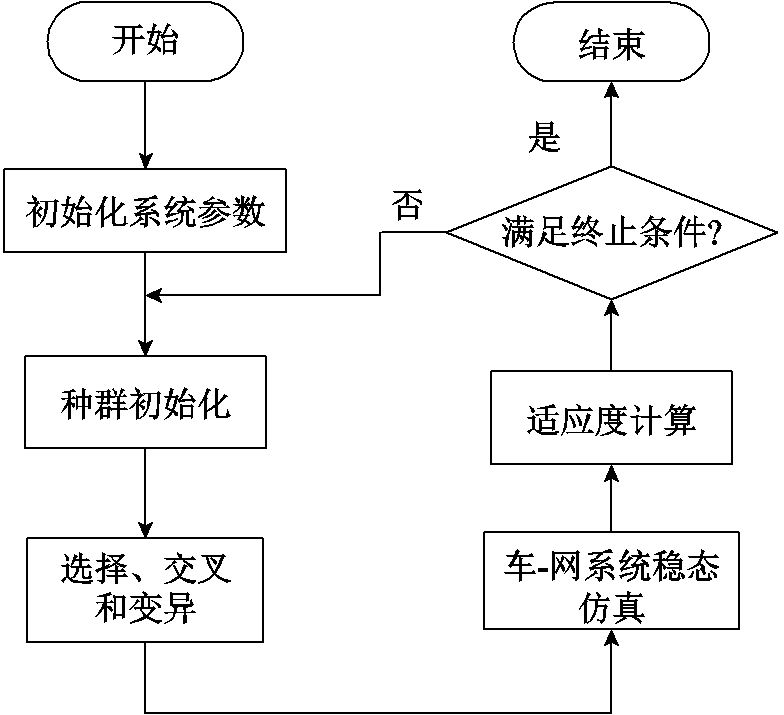
图15 最优潮流算法
Fig.15 Optimal power flow algorithm
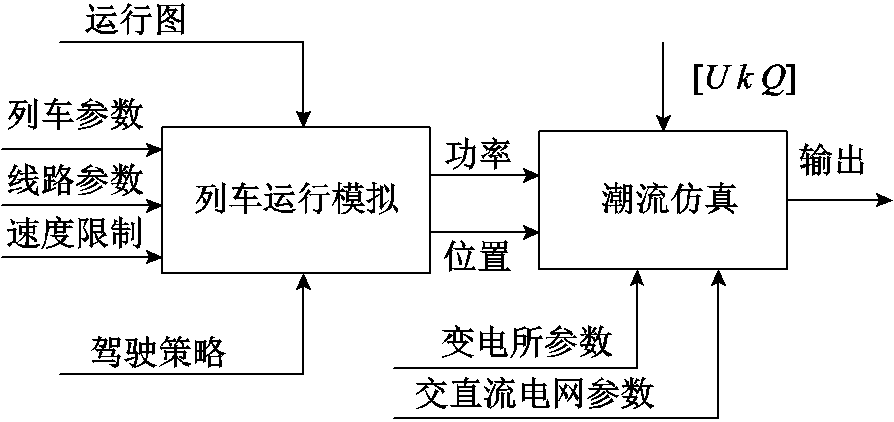
图16 车-网系统稳态仿真
Fig.16 Steady-state simulation of vehicle-grid system
1)优化目标
优化的目的是使牵引供电系统的能耗最小,目标函数可以写为
 (3)
(3)
 (4)
(4)
式中,T为发车间隔;Pi(t)为t时刻第i个主变压器瞬时有功功率;M为主变电所数量;x为优化变量;U和δ为交流电网节点的幅度和角度矢量;Uc和δc为变电站中VSC节点的幅度和角度矢量;Udc为直流电压矢量;Udc0为直流空载电压矢量;k为优化系数矢量。
2)等式约束
(1)直流潮流方程
 (5)
(5)
式中,n为直流节点数;Udci为直流节点i电压;Pdci为节点i处牵引变电所或列车功率的功率;Gdcij为直流节点导纳矩阵中第i行第j列元素。
(2)交流潮流方程




式中,PGi、QGi分别为交流节点i的有功发电和无功发电功率;PLi、QLi分别为交流节点i的有功负荷和无功负荷功率;Qrefi为通过OPF算法计算的初始值;ΔFP为VSC有功功率偏差向量;ΔFQ为VSC无功功率偏差向量;Plossi为PWM电压源变换器(Voltage Source Converter, VSC)的等效损耗,通常可以表示[16]为
 (10)
(10)
式中,a、b和c为损耗系数。
3)不等式约束
直流节点电压需满足条件
 (11)
(11)
式中,Udcmin为列车限流保护值;Udcmax为列车过电压保护值[17]。
牵引变电所节点的交流电压幅值应满足约束条件[18]为
 (12)
(12)
式中,Umin和Umax分别为交流电压幅度的最小值和最大值。
双向变流器的无功补偿指令受设备容量限制,即
 (13)
(13)
式中,SN为VSC的额定容量。
以某地铁线路为例,建立柔性牵引供电系统仿真模型。仿真系统拓扑如图17所示,该线路全线共有11座牵引变电所,牵引网采用直流1 500V架空接触网供电方式,各牵引变电所位置分布情况见表1,系统仿真参数见表2。交流电网采用集中供电方式,从外部电网的主变电站引入两路独立可靠的110kV电源,中压交流电网采用35kV,向车站、车辆段的牵引降压混合变电所、降压变电所供电。列车牵引计算曲线如图18所示。

图17 仿真系统拓扑
Fig.17 Topology of simulation system
表1 牵引变电所位置分布
Tab.1 Traction substations distribution

序号位置/m序号位置/m 10717 158 22 558820 735 34565 6789 16411 47413 4549101121 83125 01728 570
表2 仿真系统参数
Tab.2 Simulation system parameters

参数数值 35kV电缆电阻/(Ω/km)0.077 8 35kV电缆电抗/(Ω/km)0.172 0 35kV电缆电纳/(ms/km)接触网电阻/(Ω/km)钢轨电阻/(Ω/km)108.0160.0140.015 直流额定电压/V1 650 二极管整流机组等效电阻/Ω0.05 双向变流机组容量/(kV×A)4 000 交流负荷功率/kW3 000 发车间隔/s仿真步长/s3001
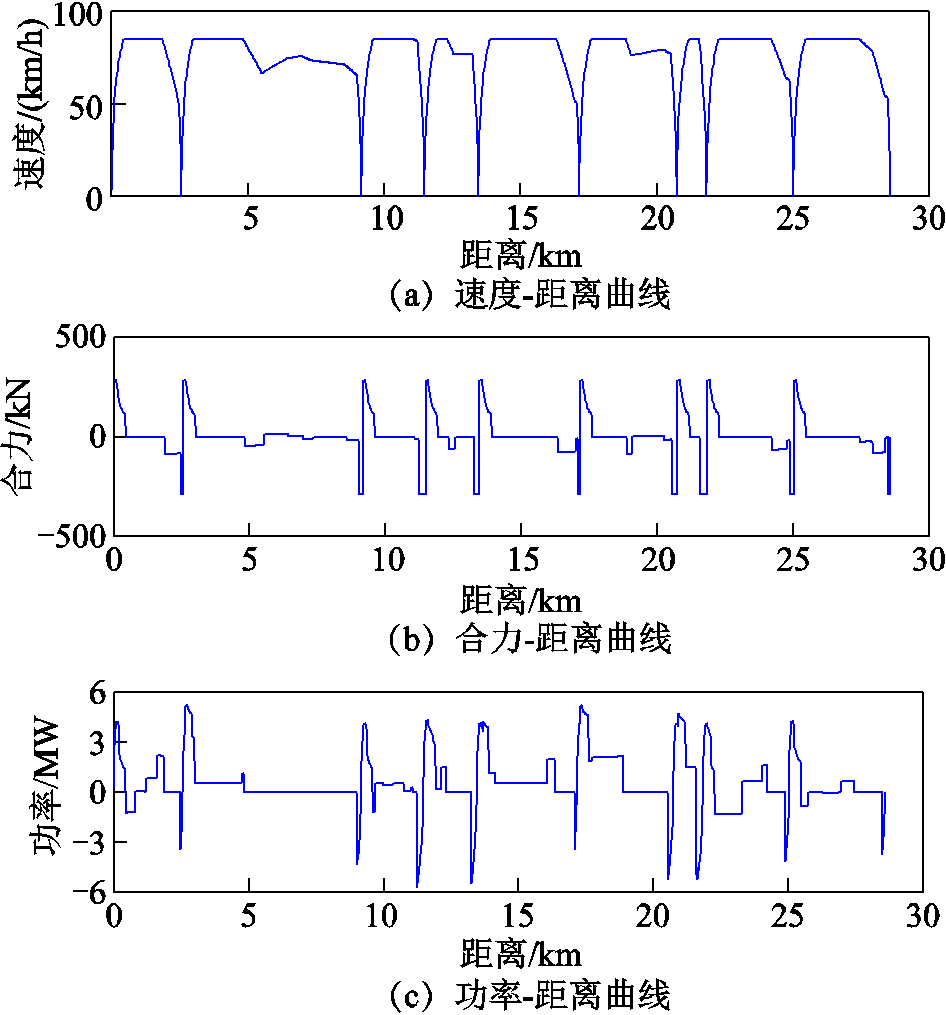
图18 牵引计算曲线
Fig.18 Traction calculation curve
设置发车间隔300s,柔性系统采用图7方案,直流电压为下垂特性,对比传统牵引供电系统二极管整流供电,VSC仅逆变且采用恒压控制特性。
300s时间内系统消耗电量对比见表3。E1为系统能耗,E2为列车制动返送到主变电所电量,Ploss为系统直流侧损耗。通过对比,采用直流电压下垂控制时,系统的总能耗及返送电量均有所下降,其中系统能耗降低3.77%,返送电量降低48.46%,制动能量在交流侧的分配得到有效优化。然而由于下垂控制中列车再生制动能量会被多个牵引变电所吸收(见图13),制动能量传输路径增加,因此相对于传统恒压控制,柔性下垂直流传输损耗更大。
表3 系统能耗对比
Tab.3 System energy consumption comparison
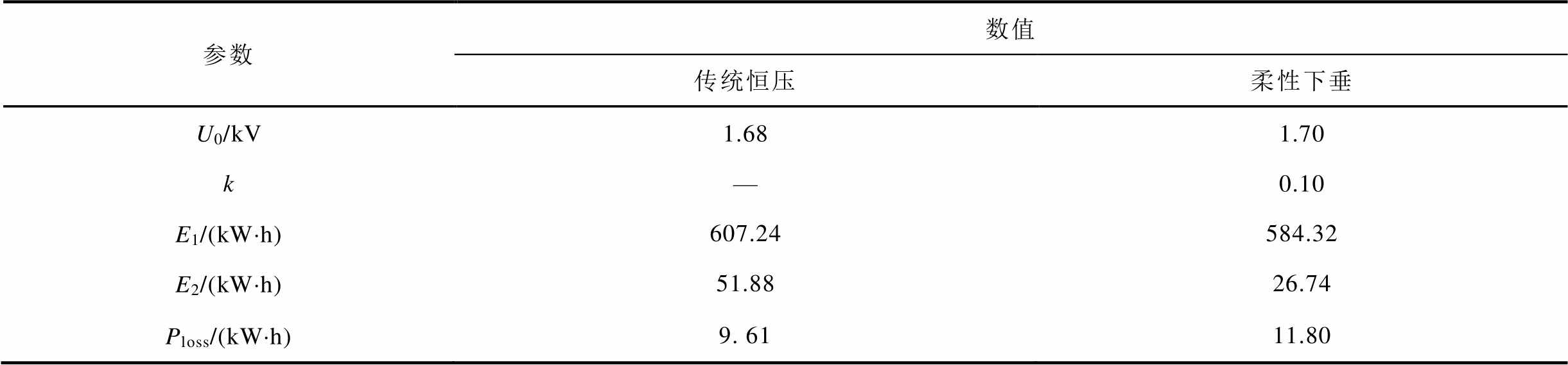
参数数值 传统恒压柔性下垂 U0/kV1.681.70 k—0.10 E1/(kW×h)607.24584.32 E2/(kW×h)51.8826.74 Ploss/(kW×h)9. 6111.80
图19对比了全线各牵引变电所消耗及反馈能量情况,牵引变电所再生制动能量反馈率=反馈电量/消耗电量。其中,图19a为采用传统恒压控制方式下的结果,平均反馈率为24.66%,反馈能量分布不均匀。特别注意的是sub3牵引所中,反馈能量很少,这是由于牵引所没有设置停车站,恒压控制下能量会就近吸收,导致sub3很少有能量反馈。图19b采用下垂控制,平均反馈率为18.53%,反馈能量分布更加均匀,分配更加合理。
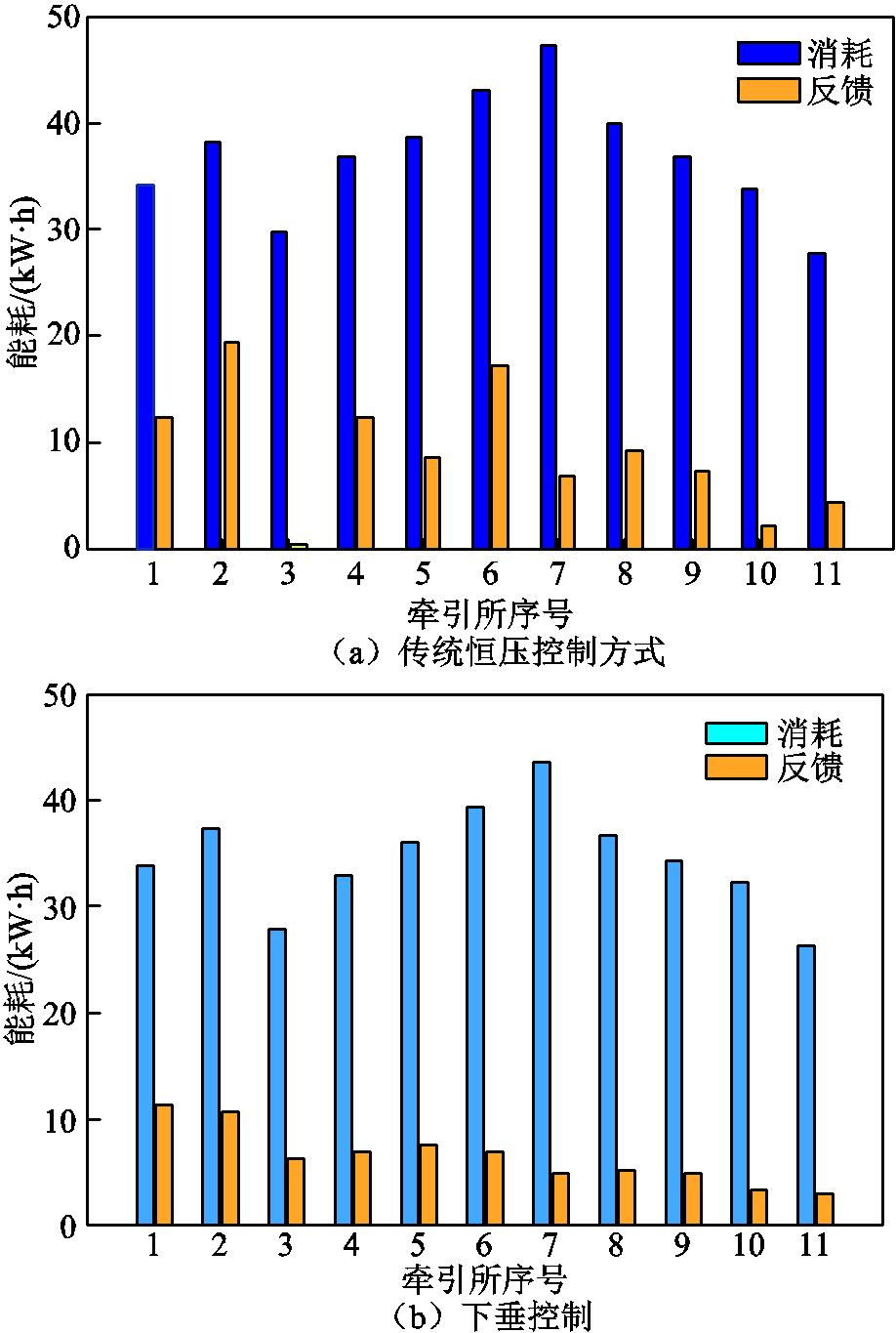
图19 牵引变电所能耗对比
Fig.19 Traction substations energy consumption comparison
图20为300s时间内sub1牵引变电所的电压和功率曲线对比。恒压控制下逆变电压为水平线,反向功率峰值更大;下垂控制下逆变电压为尖峰,由于多个牵引所协同吸收,反向功率峰值较小。
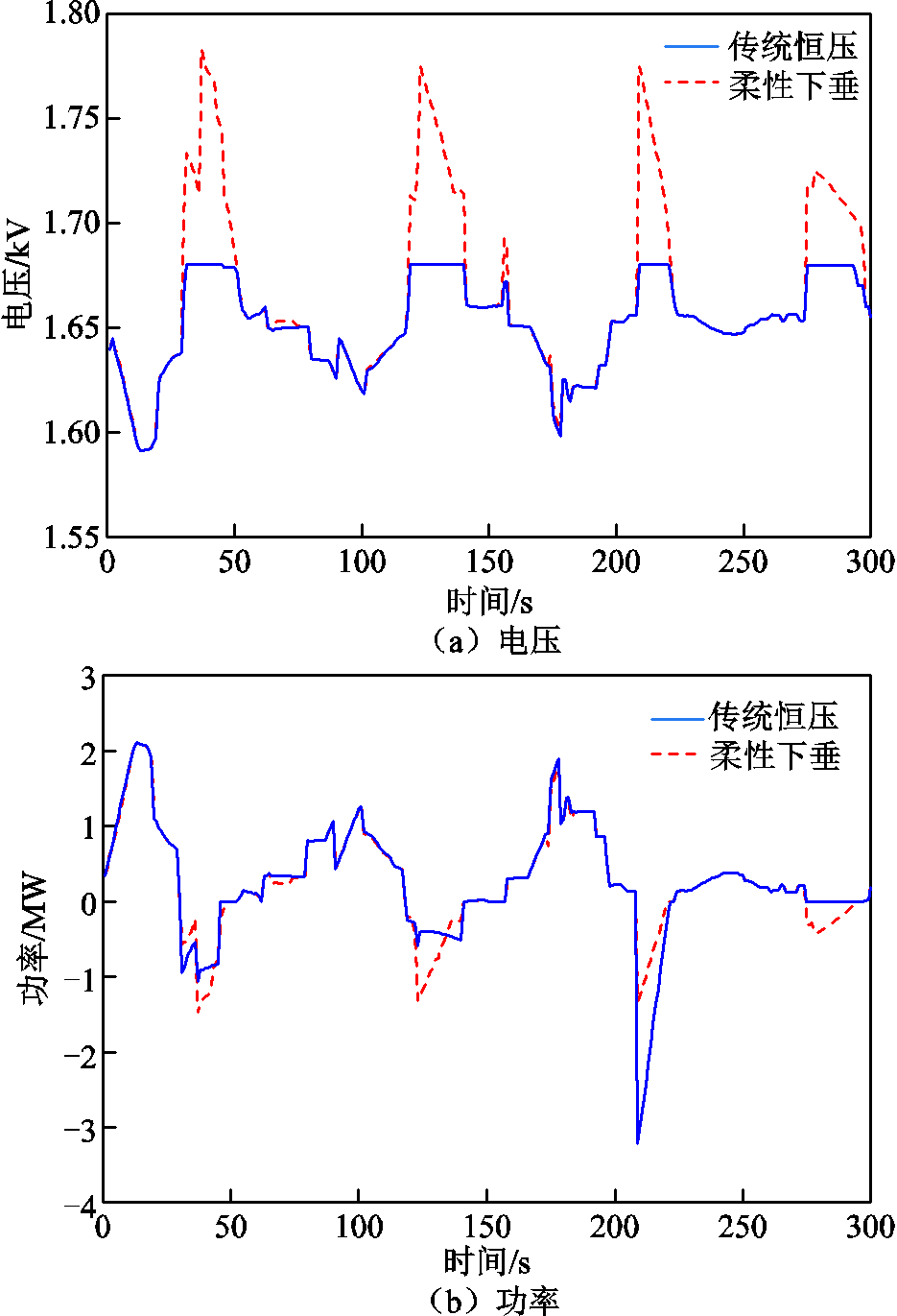
图20 牵引变电所sub1电压和功率对比
Fig.20 Voltage and power comparison of sub1
图21给出了优化前后主变电所1号母线有功功率的对比。采用下垂控制的柔性系统有功功率反向峰值减小,再生制动能量更多被负荷利用,返送城市电网的电量减少。
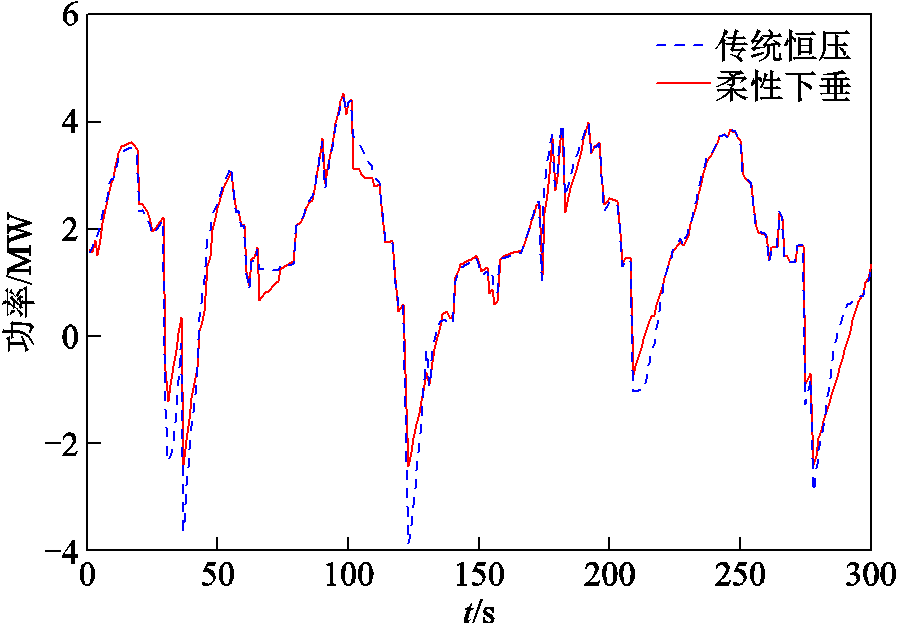
图21 主变电所1号母线所有功功率对比
Fig.21 Active power comparison of main substation bus1
图22给出了系统采用直流电压下垂控制时上、下行列车的直流电压曲线。列车电压处于1.6~1.8kV的运行范围,表明柔性下垂控制下的牵引供电系统可以保证列车的正常运行。
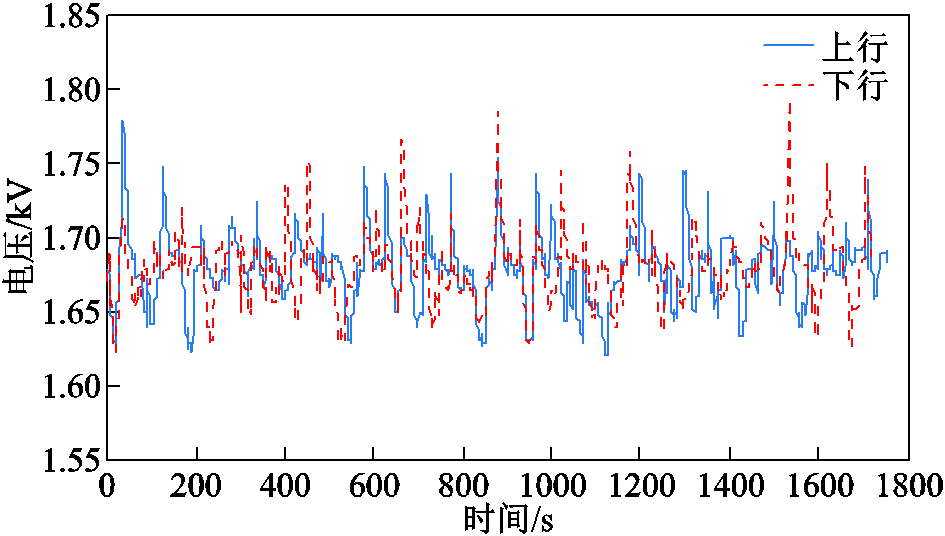
图22 列车直流电压曲线
Fig.22 Train DC voltage curves
本节为了验证最优潮流算法中分布无功补偿优化的有效性,以1号母线为例,研究夜间工况不同补偿方式下的系统潮流分布。城市轨道交通中压交流电网采用单母线分段接线方式,正常运行时母联开关断开,形成一个辐射形链式结构配电网,各电源母线间相互独立。根据图17,1号母线仅与sub1、sub3及sub5中的VSC相连,因此最优潮流算法通过控制sub1、sub3及sub5中的VSC实现对1号母线的分布无功补偿。仿真模型中,主变电所进线公共连接点(Point of Common Connection, PCC)作为线路的平衡节点,即PV节点,其他节点为PQ节点。在每个牵引变电所内,包含1个VSC节点。电缆线路采用π型集中参数模型。
对不同负荷条件(负载率5%~30%)下的系统潮流分别进行集中式无功补偿和分布式无功补偿,补偿后的无功补偿量、系统总损耗、变流器总损耗及传输损耗的结果见表4及表5。由潮流计算结果可知,系统在轻载时(负荷率10%以下)功率因数较低,需要补偿大量感性无功,此时系统损耗较大。随着负荷率提高,功率因数提升,在20%负荷率时系统需要补偿的感性无功已经很小,变流器无功补偿功率较小,系统损耗降低。当符合率达到30%,系统表现为感性,需要补偿容性无功。
表4 集中式无功补偿潮流分布
Tab.4 Power flowwith centralized RPC

负荷率(%)总损耗/kW变流器损耗/kW传输损耗/kW无功补偿量/kvar功率因数 533.2021.3211.881 5601.00 1018.8312.416.421 1231.00 203.061.351.712281.00 3011.746.175.57-6971.00
表5 分布式无功补偿潮流分布
Tab.5 Power flowwith distributed RPC

负荷率(%)总损耗/kW变流器损耗/kW传输损耗/kW无功补偿量/kvar功率因数 515.7011.704.001 5061.00 109.827.442.381 0951.00 203.051.501.552271.00 308.204.154.05-7081.00
对比表4与表5的结果,相同负载率下分布式补偿与集中补偿方式的无功补偿量近似相同,但系统总损耗以及变流器、传输线等各部分损耗都有显著降低。当系统处于5%负荷率的轻载状态时,分布式补偿下的系统损耗较集中补偿降低了66.33%,大大降低了线路在夜间无功补偿期间的损耗电量。仿真结果表明,基于最优潮流算法的分布式无功补偿方案对柔性牵引供电系统可以达到明显的无功补偿及节能效果。
本文提出了一种城市轨道交通柔性牵引供电系统方案,实现了系统综合优化与能效提升。提出了分散式无功补偿、牵引供电、能量回馈利用的变电设备的多功能复合,简化了系统结构,节约了设备投资成本;提出了柔性牵引供电系统最优潮流控制方法:在运营期间通过直流电压下垂控制实现车辆制动能量最大利用,系统综合能耗最低;在非运营期间,通过优化无功补偿指令,实现功率因数可控,交流系统损耗最小。
参考文献
[1] 丁树奎, 韩志伟, 张钢, 等. 能馈式牵引供电原理及其在城市轨道交通中的应用[M]. 北京:北京交通大学出版社,2014.
[2] 诸斐琴, 杨中平, 林飞, 等. 城轨交通牵引供电系统参数与储能系统容量配置综合优化[J]. 电工技术学报, 2019, 34(3): 579-588.
Zhu Feiqin, Yang Zhongping, Lin Fei, et al. Synthetic optimization of traction power parameters and energy storage systems in urban rail transit[J]. Transactions of China Electrotechnical Society, 2019, 34(3): 579-588.
[3] 胡海涛, 王江峰, 何正友, 等. 地铁牵引供电系统交-直流潮流算法研究[J]. 铁道学报, 2012, 34(11): 22-28.
Hu Haitao, Wang Jiangfeng, He Zhengyou, et al. Power flow algorithm study for metro traction supply system[J]. Journal of the China Railway Society, 2012, 34(11): 22-28.
[4] 赵亚杰, 夏欢, 王俊兴, 等. 基于动态阈值调节的城轨交通超级电容储能系统控制策略研究[J]. 电工技术学报, 2015, 30(14): 427-433.
Zhao Yajie, Xia Huan, Wang Junxing, et al. Research on dynamic threshold adjustment based control strategy of supercapacitor energy storage system in urban rail transit[J]. Transactions of China Electrotechnical Society, 2015, 30(14): 427-433.
[5] 刘炜, 娄颖, 张戬, 等. 计及城市轨道逆变回馈装置的交直流统一供电计算[J]. 电工技术学报, 2019, 34(20): 4381-4391.
Liu Wei, Lou Ying, Zhang Jian, et al. Unified AC/DC power supply calculation taking into account urban rail inverter feedback devices[J]. Transactions of China Electrotechnical Society, 2019, 34(20): 4381-4391.
[6] Suzuki T. DC power-supply system with inverting substations for traction systems using regenerative brakes[J]. IEE Proceedings B - Electric Power Applications, 1982, 129(1): 18-26.
[7] 夏欢, 杨中平, 杨志鸿, 等. 基于列车运行状态的城轨超级电容储能装置控制策略[J]. 电工技术学报, 2017, 32(21): 16-23.
Xia Huan, Yang Zhongping, Yang Zhihong, et al. Control strategy of supercapacitor energy storage system for urban rail transit based on operating status of trains[J]. Transactions of China Electrotechnical Society, 2017, 32(21): 16-23.
[8] 廖钧. 城市轨道供电系统无功补偿方案研究[D]. 成都: 西南交通大学, 2017.
[9] Varma R, Khadkikar V, Seethapathy R. Nighttime application of PV solar farm as STATCOM to regulate grid voltage[J]. IEEE Transactions on Energy Conversion, 2009, 24(4): 983-985.
[10] Turitsyn K, Sulc P, Backhaus S, et al. Options for control of reactive power by distributed photovoltaic generators[J]. Proceedings of the IEEE, 2011, 99(6): 1063-1073.
[11] Rouzbehi K, Miranian A, Luna A, et al. DC voltage control and power sharing in multiterminal DC grids based on optimal DC power flow and voltage-droop strategy[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2014, 2(4): 1171-1180.
[12] Beerten J, Cole S, Belmans R. Generalized steady-state VSC MTDC model for sequential AC/DC power flow algorithms[J]. IEEE Transactions on Power Systems, 2012, 27(2): 821-829.
[13] Zhang Gang, Tian Zhongbei, Tricoli P, et al. Inverter operating characteristics optimization for DC traction power supply systems[J]. IEEE Transactions on Vehicular Technology, 2019, 68(4): 3400-3410.
[14] 刘志刚, 郝峰杰, 陈杰, 等. 城轨牵引供电系统车-地配合参数优化方法[J]. 北京交通大学学报, 2019, 43(1): 79-87.
Liu Zhigang, Hao Fengjie, Chen Jie, et al. Optimization method of train-ground coordination parameters for urban traction power supply system[J]. Journal of Beijing Jiaotong University, 2019, 43(1): 79-87.
[15] Karki U, Gunasekaran D, Peng Fangzheng. Reactive compensation of overhead ac transmission lines using underground power cables[C]//IEEE Power & Energy Society General Meeting, Denver, 2015: 1-5.
[16] Cao Jun, Du Wenjuan, Wang Haifeng, et al. Minimization of transmission loss in meshed AC/DC grids with VSC-MTDC networks[J]. IEEE Transactions on Power Systems, 2013, 28(3): 3047-3055.
[17] Arboleya P, Mohamed B, El-Sayed I. DC railway simulation including controllable power electronic and energy storage devices[J]. IEEE Transactions on Power Systems, 2018, 33(5): 5319-5329.
[18] Coto M, Arboleya P, Gonzalez-Moran C. Optimization approach to unified AC/DC power flow applied to traction systems with catenary voltage constraints[J]. International Journal of Electrical Power & Energy Systems, 2013, 53: 434-441.
Research on Urban Rail Transit Flexible Traction Power Systems and Optimal Control
Abstract In order to solve the problems of the traditional traction power supply system, such as the insufficient utilization of the regenerative energy of trains, the large fluctuation of DC power supply, the low power factor of AC network, a flexible traction power supply system scheme with the introductionof bidirectional converter is proposed. This paper introduces several typical working modes of flexible traction power supply system and the realization scheme of bidirectional substation. The key technologies such as bidirectional converter modeling, DC characteristic optimization and decentralized reactive compensation are studied. The hierarchical control structure of flexible power supply system is proposed to realize the flexible control of AC-DC hybrid system. The simulation model of urban rail flexible power supply system is established, and the system function and performance under typical application scenarios are verified, and the comprehensive optimization of the system is realized.
keywords:Urban rail transit, flexible, traction power supply, hybrid, energy saving
DOI:10.19595/j.cnki.1000-6753.tces.L90518
中图分类号:U223.6
中央高校基本科研业务费专项资金资助项目(2018JBZ004)。
收稿日期 2020-07-12
改稿日期 2020-09-23
张 钢 男,1982年生,副教授,研究方向为电力电子与控制,包括大功率牵引变流器、并网逆变器和地铁节能技术。E-mail:gzhang@bjtu.edu.cn(通信作者)
郝峰杰 男,1987年生,博士,研究方向为柔性直流输电技术。E-mail:16117396@bjtu.edu.cn
(编辑 郭丽军)