 及其互补管
及其互补管 ,1个悬浮电容
,1个悬浮电容 和2个半母线支撑电容
和2个半母线支撑电容 、
、 ,各相桥臂共用一个直流母线及支撑电容中点。
,各相桥臂共用一个直流母线及支撑电容中点。 摘要 有源中点钳位五电平(ANPC-5L)拓扑是一种适用于中高压变频驱动的新型拓扑结构。现有ANPC-5L逆变器悬浮电容预充电方法具有简单可靠、不需要外部充电电路等优势,但也存在开关管电压应力过大、强制互补的开关管直通等不足。针对此问题,该文提出一种悬浮电容预充电控制策略,通过在交流侧布置预充电电阻,即可实现直流侧支撑电容和桥臂内悬浮电容同时预充电,预充电过程中既可以确保支撑电容中点电位为母线电压的一半,也可以确保各桥臂悬浮电容电压为母线电压的四分之一。该文分析预充电过程的等效电路,推导预充电过程中电容电压的时域解析表达式,得出预充电电路参数设计的理论依据。通过电路仿真,对所提预充电控制策略进行了验证,同时在一台功率等级为100kW的ANPC-5L逆变器样机上对所提控制策略进行了实验验证。
关键词:有源中点钳位 五电平 悬浮电容 预充电 电容电压控制
有源中点钳位五电平(Active Neutral-Point- Clamped Five-Level,ANPC-5L)拓扑结构自2005年被提出以来,因其输出电平多、开关管承受电压应力低和控制冗余性高等优势受到了国内外学者的广泛关注,被认为是具有广阔应用前景的多电平拓扑的典型代表[1-6]。作为一种新型多电平拓扑结构,ANPC-5L拓扑避免了模块化多电平拓扑中子模块电压不均衡且存在波动的问题,也克服了传统二极管钳位拓扑和飞跨电容多电平拓扑存在的钳位中点多、器件数量多等不足,其实用性已经历了相关工业产品的验证[6-9]。由于ANPC-5L拓扑只有一个母线中点,多数开关器件的开关频率和输出基频保持一致,只有少部分器件工作在高频开关状态[10-12]。该拓扑既有利于简化控制算法,又有利于降低装置的总体损耗、提高电能变换效率。ANPC-5L拓扑中各开关管承受的电压应力仅为母线电压的四分之一,非常适合应用于中高压变频驱动领域[13-14]。因此,研究ANPC-5L逆变器及其控制策略具有重要的理论研究和实际应用价值[15-16]。
ANPC-5L逆变器拓扑中存在两种类型的电容:一种为直流母线的支撑电容,支撑电容分为上半母线支撑电容和下半母线支撑电容;另一种为桥臂内的悬浮电容,各桥臂内均有一个悬浮电容。ANPC- 5L逆变器正常工作的前提[12, 17-18]是控制支撑电容的中点电位为直流母线电压的一半,悬浮电容电压为直流母线电压的四分之一。控制支撑电容和悬浮电容电压一方面是ANPC-5L逆变器输出五种标准电压的前提;另一方面是避免开关管承受过高电压应力的重要保证[19]。因此,支撑电容和悬浮电容预充电是ANPC-5L逆变器起动运行前的必要环节。
目前,多数学者都是基于低压小功率实验平台开展ANPC-5L逆变器的研究,实验中通过额外的独立电源对悬浮电容预充电[20-22]。但是该方法一方面操作复杂度高、成本需求大;另一方面对充电精度和三相悬浮电容电压一致性难以保证,不适用于高压大功率场合。针对此问题,文献[19]提出了一种依靠ANPC-5L本体电路进行悬浮电容预充电的方法。该方案通过合理地选取开关模态,将相邻两相ANPC-5L拓扑等效为Boost电路,将电机负载等效为预充电回路的阻感负载,在小电流工况下利用直流母线电压依次对三相悬浮电容充电。但由于该策略对支撑电容和悬浮电容充电是独立进行的,一方面增加了实现复杂度;另一方面会在充电过程中出现部分开关管电压应力加倍的问题。为避免开关管电压应力过大的问题,文献[23]提出了一种ANPC-5L整流器的电容预充电方法。该方法在设置交流侧充电电路的基础上有序控制各相桥臂开关管通断,并且分四个阶段对悬浮电容及支撑电容充电。然而,该方法需要额外的三相380V充电电源及变压器,增加了实现复杂度;且在充电过程中存在桥臂内互补开关管同时导通的情况,极大地增加了安全隐患,这在高压大功率工程应用场合中应当是被禁止的。文献[3]提出了一种在ANPC-5L逆变器运行过程中的悬浮电容电压控制策略,该控制策略可以在ANPC-5L逆变器起动运行过程中自动将悬浮电容充电至直流母线电压的四分之一,但其仍存在开关管承受电压应力加倍的问题。
针对上述问题,本文提出了一种改进型的悬浮电容预充电控制策略,该策略不需要额外的独立充电电源,只需要在逆变器的三相输出端口布置一套小功率三相充电电阻。预充电过程均利用ANPC-5L逆变器正常的开关模态,避免了出现强制互补的开关管同时导通的情况。该策略可以实现支撑电容和悬浮电容同时预充电,既可以保证支撑电容中点电位为母线电压的一半,又可以保证三相桥臂的悬浮电容电压均为母线电压的四分之一。理论推导、仿真分析和实验结果均验证了所提充电策略的正确性和实用性。
单个ANPC-5L桥臂的拓扑结构如图1所示。由图1可知,单个ANPC-5L桥臂包含12个开关管,及其互补管,1个悬浮电容和2个半母线支撑电容、,各相桥臂共用一个直流母线及支撑电容中点。
图1中, 为上半母线电容的电流,
为上半母线电容的电流, 为下半母线电容的电流,
为下半母线电容的电流, 为支撑电容中点的电流,
为支撑电容中点的电流, 为悬浮电容的电流,
为悬浮电容的电流, 为输出相电流。电流正方向如图1中箭头指向。
为输出相电流。电流正方向如图1中箭头指向。
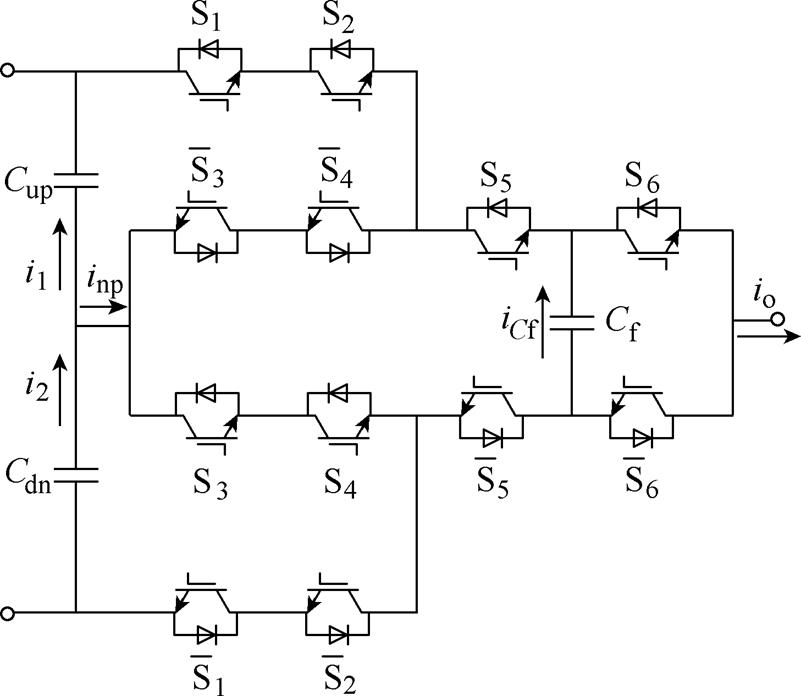
图1 单个ANPC-5L桥臂的拓扑结构
Fig.1 Topology of single ANPC-5L bridge
假设ANPC-5L逆变器的直流母线电压为4E,逆变器正常工作时,半母线支撑电容、电压与悬浮电容电压应满足2E 2EE的关系。因此,以支撑电容中点为参考点,ANPC-5L桥臂可以输出-2E、-E、0、E、2E五个等级的电压,包含M0、M1、M2、M3、M4、M5、M6、M7共八种开关模态。用0和1表示开关器件的开关状态,0表示关断、1表示导通,开关状态分别与的开关状态互补。单个ANPC-5L桥臂对应的八种开关模态见表1。表中,uo为输出电压。由表1可知,开关模态为M1、M2、M5、M6时,悬浮电容电流不为0,各桥臂处于以上四种开关模态时,会对悬浮电容电压产生影响。
2EE的关系。因此,以支撑电容中点为参考点,ANPC-5L桥臂可以输出-2E、-E、0、E、2E五个等级的电压,包含M0、M1、M2、M3、M4、M5、M6、M7共八种开关模态。用0和1表示开关器件的开关状态,0表示关断、1表示导通,开关状态分别与的开关状态互补。单个ANPC-5L桥臂对应的八种开关模态见表1。表中,uo为输出电压。由表1可知,开关模态为M1、M2、M5、M6时,悬浮电容电流不为0,各桥臂处于以上四种开关模态时,会对悬浮电容电压产生影响。
表1 单个ANPC-5L桥臂的开关模态
Tab.1 Switch modes of single ANPC-5L bridge

S1~S4S5S6uoiCfinp开关模态 000-2E00M0 001-Eio0M1 010-E-ioioM2 01100ioM3 10000ioM4 101E-ioioM5 110E-io0M6 1112E00M7
正常条件下,支撑电容和悬浮电容均充电完成后,半母线支撑电容、电压与悬浮电容电压应分别为2E、2E和E。分析单个ANPC-5L桥臂对应的八种开关模态可知,电路不工作时各开关管承受的电压应力均为E/2,电路开始工作后各开关管承受的最大电压应力为E。
半母线电容充电完成后,ANPC-5L逆变器若在悬浮电容未充电情况下开始运行,开关管承受的最大电压应力可达2E,是正常工况下电压应力的2倍,这无疑对开关器件提出了更高的要求。因此,悬浮电容预充电是ANPC-5L逆变器正常运行必不可少的一个环节。
本节对三种现有的ANPC-5L逆变器悬浮电容预充电控制策略进行介绍,分析各个策略的优势及其存在的不足,明确预充电控制策略的关键点和难点,增加解决问题的针对性。
文献[19]提出了一种依靠ANPC-5L本体电路进行悬浮电容预充电的方法。电容预充电电流流通路径如图2所示。充电过程分为两个阶段:第一阶段为直流母线向悬浮电容和负载电感充电,电感电流逐渐上升,电流流通路径如图2a所示;第二阶段负载电感通过续流向悬浮电容充电,负载电流逐渐下降,电流流通路径如图2b所示。其中,开关管下角标a和b分别表示A相和B相桥臂。由于上述两个阶段中电流路径未涉及开关管 、
、 、
、 、
、 ,所以在图2中对上述开关管进行了省略。
,所以在图2中对上述开关管进行了省略。
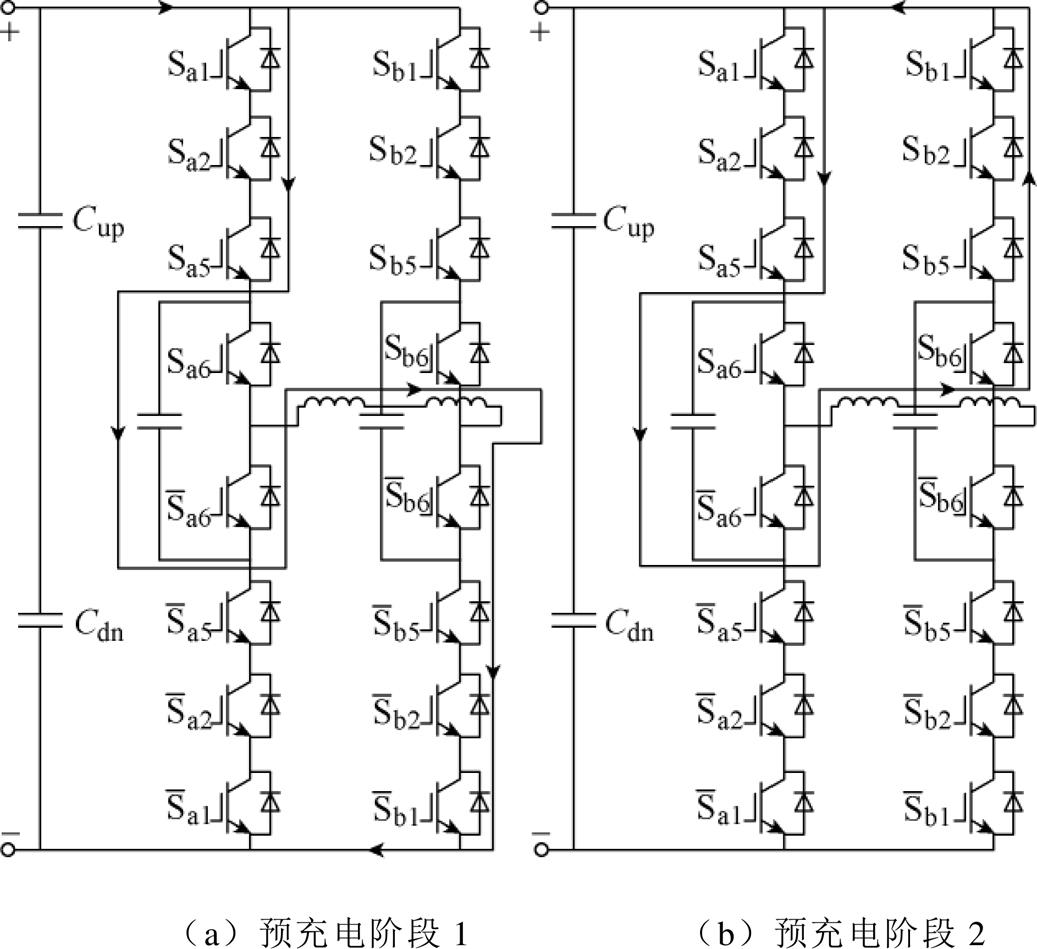
图2 电容预充电电流流通路径
Fig.2 Current path in capacitor pre-charging process
该充电策略中,某一时刻只有相邻两相的开关管动作,对前一相悬浮电容充电。当某一相电容充满电后更换动作相,对下一相电容进行充电,直至将所有电容充电至目标值。
文献[23]提出的ANPC-5L整流器的电容预充电方法通过在交流侧设置充电电路对悬浮电容及支撑电容进行充电。ANPC-5L整流器电容预充电等效电路如图3所示。充电过程分为四个阶段:①对支撑电容初步充电,目标值为E;②对三相悬浮电容充电,目标值为E;③对上半母线支撑电容充电,目标值为2E;④对下半母线支撑电容充电,目标值为2E。一、二、三阶段等效电路分别如图3a~图3c所示。图中,ua、ub、uc分别为交流侧三相电源电压,R为充电电阻,VDa1~VDc12分别为ANPC-5L桥臂开关管、对应的反并联二极管。
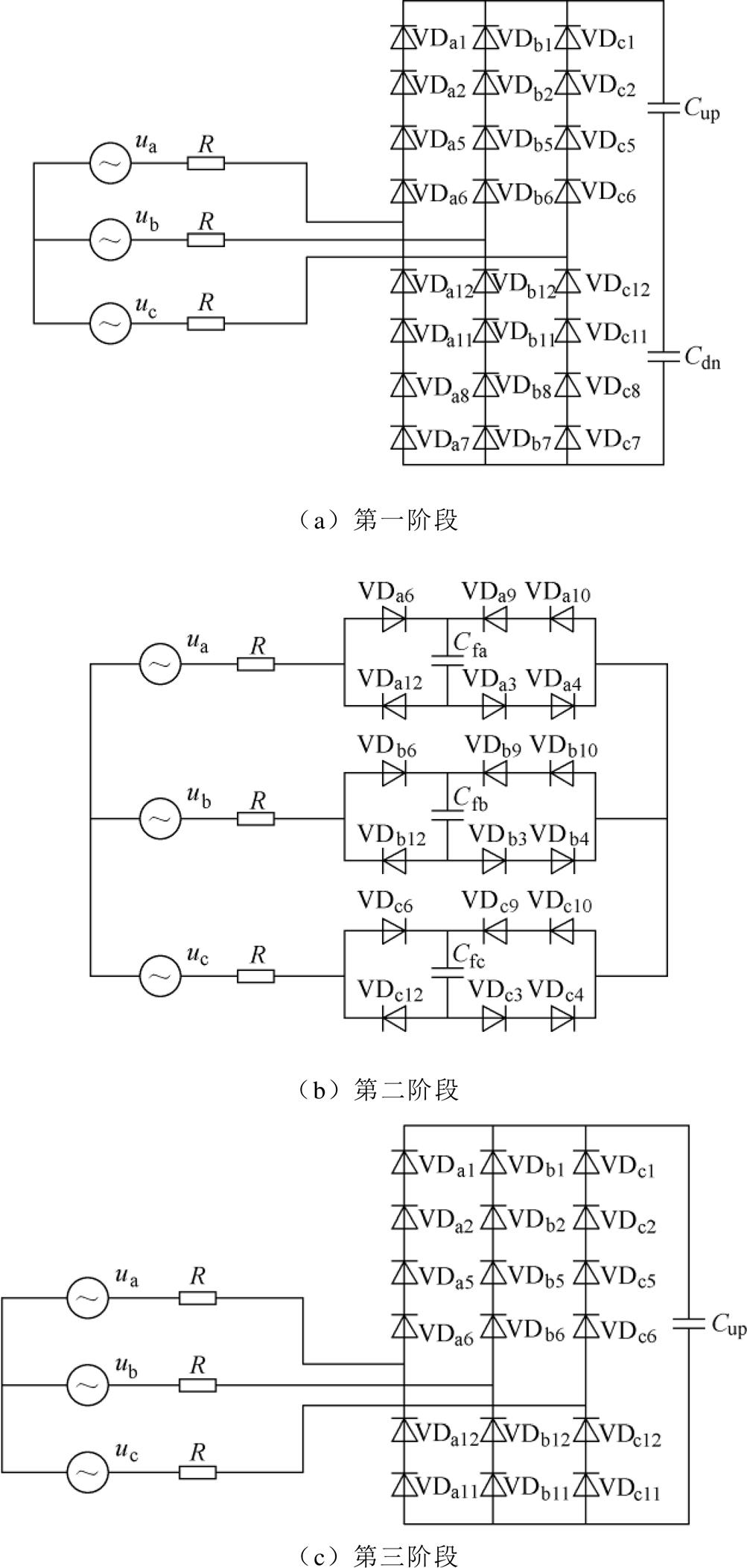
图3 ANPC-5L整流器电容预充电等效电路
Fig.3 Equivalent circuits in capacitor pre-charging process of ANPC-5L rectifier
第一阶段,所有开关管均为关闭状态,每相二极管VD1、VD2、VD5、VD6、VD7、VD8、VD11、VD12导通,等效电路为三相全桥不控整流电路,整流输出侧为2个半母线支撑电容串联,每个支撑电容充电目标值均为E。
第二阶段,每相开关管 及其互补管
及其互补管 导通,悬浮电容充电目标值为E,该阶段可将悬浮电容充电至最终目标值。
导通,悬浮电容充电目标值为E,该阶段可将悬浮电容充电至最终目标值。
第三阶段,每相开关管、导通,电路等效为三相全桥不控整流电路,整流输出侧为上半母线电容,充电目标值为2E,该阶段可将上半母线支撑电容充电至最终目标值。
第四阶段与第三阶段同理,因此不再赘述。
文献[3]提出了一种在ANPC-5L逆变器起动运行过程中实现各桥臂悬浮电容预充电的策略。在母线支撑电容预充电完毕的基础上,通过提出的悬浮电容电压控制策略在运行过程中对悬浮电容充电。由于逆变器初始状态悬浮电容电压为0,支撑电容电压为母线电压的二分之一,该策略会产生开关管电压应力加倍的问题。在预充电初始状态下,以开关模态M6为例进行分析,开关状态如图4所示。
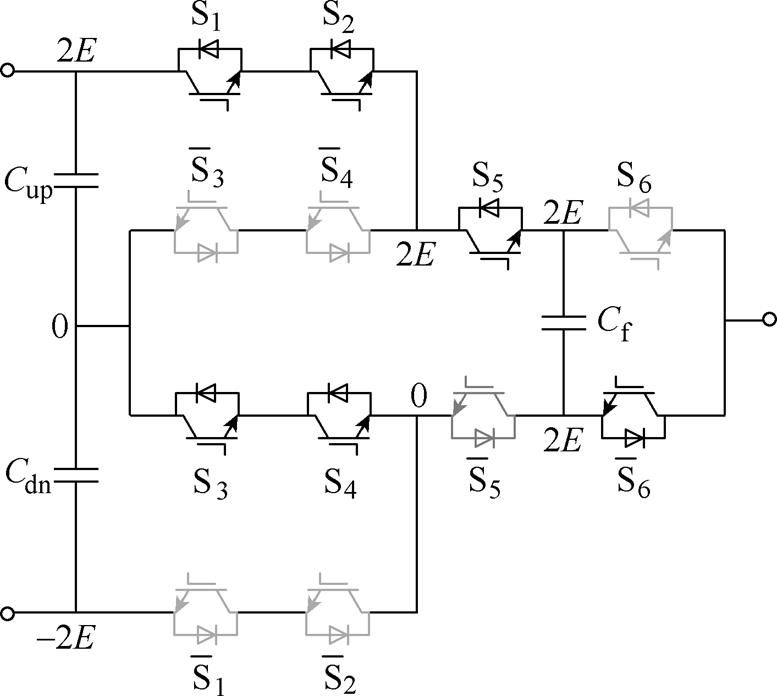
图4 单个ANPC-5L桥臂开关模态M6
Fig.4 Switch mode M6 of single ANPC-5L bridge
该模态下开关管 ~及
~及 导通,悬浮电容电压为0。对于未开通的高频侧开关管,其右侧承受直流母线电压,左侧承受支撑电容中点电压,因此其承受的电压应力为直流母线电压的二分之一,是正常工况下电压应力的两倍。该策略无形中提高了高频侧开关管承受的电压应力,对器件电压等级提出了更高的要求。
导通,悬浮电容电压为0。对于未开通的高频侧开关管,其右侧承受直流母线电压,左侧承受支撑电容中点电压,因此其承受的电压应力为直流母线电压的二分之一,是正常工况下电压应力的两倍。该策略无形中提高了高频侧开关管承受的电压应力,对器件电压等级提出了更高的要求。
文献[19]的方法不需要添加任何额外的器件,因此没有任何额外的成本代价,只利用电路本身和交流侧负载,即可完成悬浮电容预充电。然而,该方法必须要对支撑电容和悬浮电容分步充电,在悬浮电容充电过程中依次对三相悬浮电容充电。一方面,该方法存在高频侧开关管电压应力加倍的问题;另一方面,预充电过程中流过负载的充电电流可能会对交流侧负载带来不利的影响。
文献[23]的方法中,充电电流不流经交流侧负载,不会对交流侧负载产生干扰;也避免了文献[19]中开关管电压应力加倍的问题。但其需要额外设置三相交流预充电电源且需要分步对电容进行充电。该策略一方面过程复杂,对控制时序提出了很高的要求;另一方面在第二阶段中需要强制本应互补的开关管同时导通,大大增加了系统的不稳定因素,极大地降低了其在工程应用中的可行性。
文献[3]通过提出的悬浮电容电压控制策略在ANPC-5L逆变器起动运行过程中对悬浮电容充电,不需要增加额外的元器件,也不需要单独的悬浮电容预充电过程,但其仍然存在开关管承受电压应力加倍的问题。
针对以上预充电策略中存在的不足,提出了一种ANPC-5L逆变器悬浮电容预充电控制策略,本节分别从预充电电路结构及充电流程、模态选取原则、预充电等效电路分析三方面进行介绍。
图5为ANPC-5L逆变器预充电电路,其中,图5a为支撑电容预充电电路,图5b为悬浮电容预充电电路。由图5a可知,在直流母线侧设置充电电阻 、充电接触器
、充电接触器 和直流断路器
和直流断路器 ,即可实现支撑电容预充电;由图5b可知,只在逆变器三相输出端口布置一套小功率三相充电电阻
,即可实现支撑电容预充电;由图5b可知,只在逆变器三相输出端口布置一套小功率三相充电电阻 及悬浮电容充电接触器
及悬浮电容充电接触器 ,同时使逆变器工作在特定开关模态下,即可对悬浮电容进行预充电。其中,Udc为直流母线电压,A、B、C为ANPC-5L逆变器的三相输出端口,
,同时使逆变器工作在特定开关模态下,即可对悬浮电容进行预充电。其中,Udc为直流母线电压,A、B、C为ANPC-5L逆变器的三相输出端口, 为交流输出接触器,AO、BO、CO为交流负载输入端口。其中,接触器与不能同时闭合。
为交流输出接触器,AO、BO、CO为交流负载输入端口。其中,接触器与不能同时闭合。
ANPC-5L逆变器悬浮电容预充电实现步骤可总结如下:首先闭合悬浮电容充电接触器,而后闭合直流充电接触器,同时使ANPC-5L逆变器按照既定的开关模态进行动作,即可对支撑电容和悬浮电容同时进行充电。充电完成后支撑电容电压会稳定在2E,各桥臂悬浮电容电压会稳定在E。
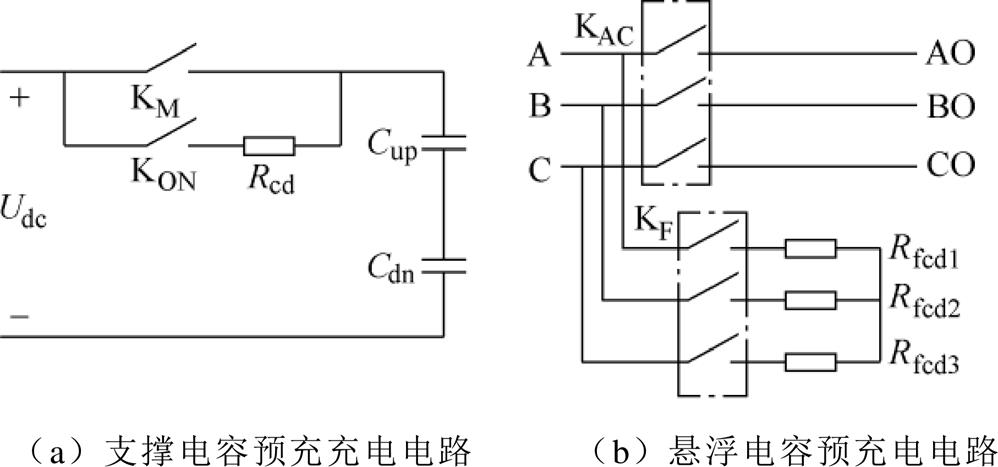
图5 ANPC-5L逆变器预充电电路
Fig.5 Pre-charging circuits of ANPC-5L inverter
本节介绍预充电过程中桥臂开关模态的选取原则。悬浮电容预充电有两种充电路径:一种充电路径可以升高中点电位;另一种充电路径可以降低中点电位。根据当前中点电位偏差和当前悬浮电容电压的状态选择相应的开关模态。下面对充电路径和相应开关模态进行举例分析。
当支撑电容中点电位小于直流母线电压的二分之一时,选取预充电路径1,其示意图如图6所示。在预充电路径1中,有一相桥臂处于满电流充电状态,开关模态为M6,如图6a所示;另外两相桥臂处于半电流充电状态,开关模态为M5,如图6b所示。在预充电过程中,使悬浮电容电压最低的一相桥臂处于满电流充电状态,另外两相桥臂处于半电流充电状态。从交流侧观察,充电电流从处于开关模态M6的桥臂流出,从处于开关模态M5的另外两个桥臂流入;从直流侧观察,电流从正母线流出,最终流入支撑电容中点,支撑电容中点电位升高。
当支撑电容中点电位大于直流母线电压的二分之一时,选取预充电路径2,其示意图如图7所示。在预充电路径2中,有一相桥臂处于满电流充电状态,开关模态为M2,如图7a所示;另外两相桥臂处于半电流充电状态,开关模态为M1,如图7b所示。在预充电过程中,使悬浮电容电压最低的一相桥臂处于满电流充电状态,另外两相桥臂处于半电流充电状态。从交流侧观察,充电电流从处于开关模态M2的桥臂流出,从处于开关模态M1的另外两个桥臂流入;从直流侧观察,电流从支撑电容中点流出,最终流入负母线,支撑电容中点电位降低。
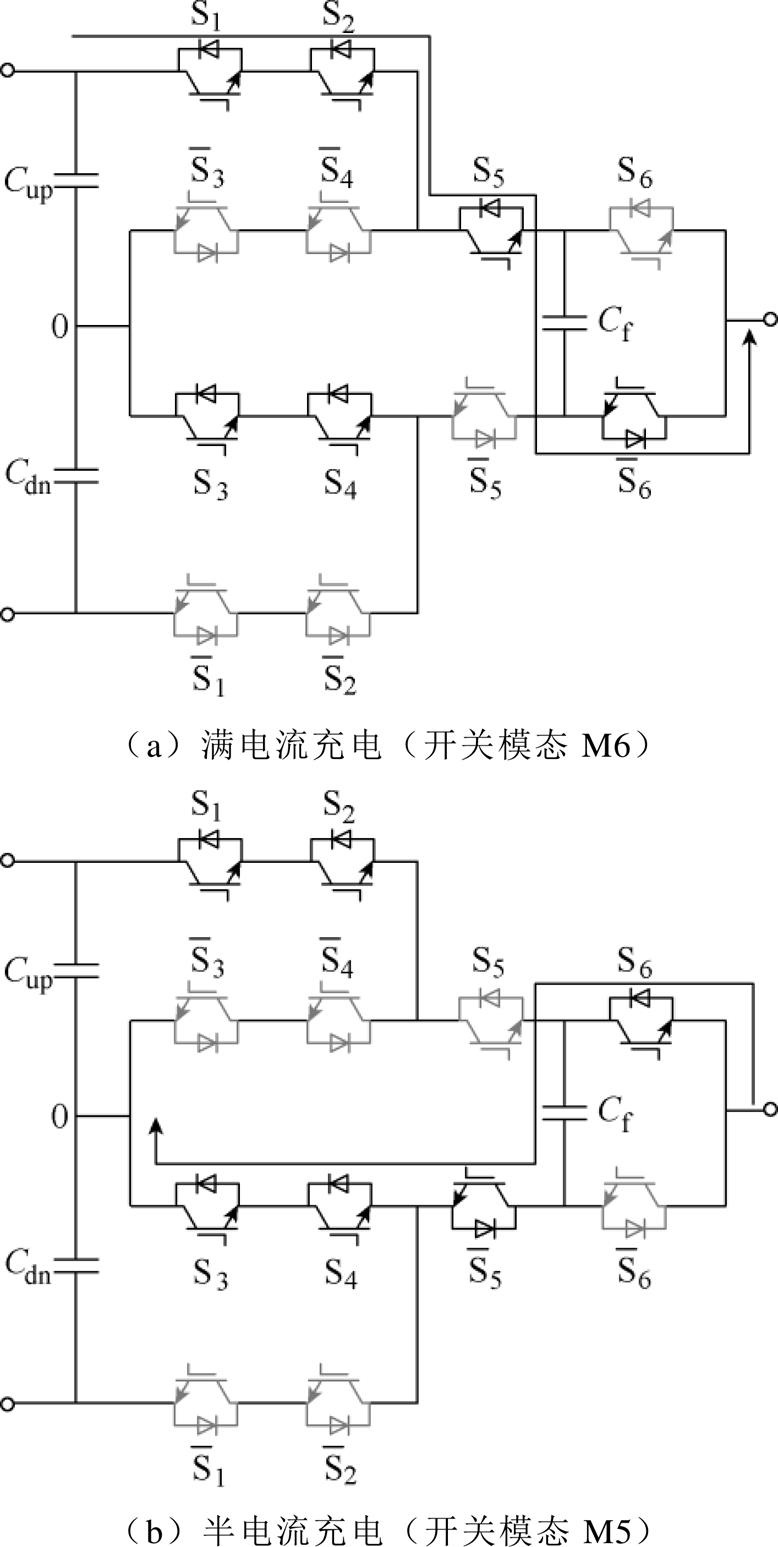
图6 预充电电流路径1示意图
Fig.6 Diagram of pre-charging current path 1
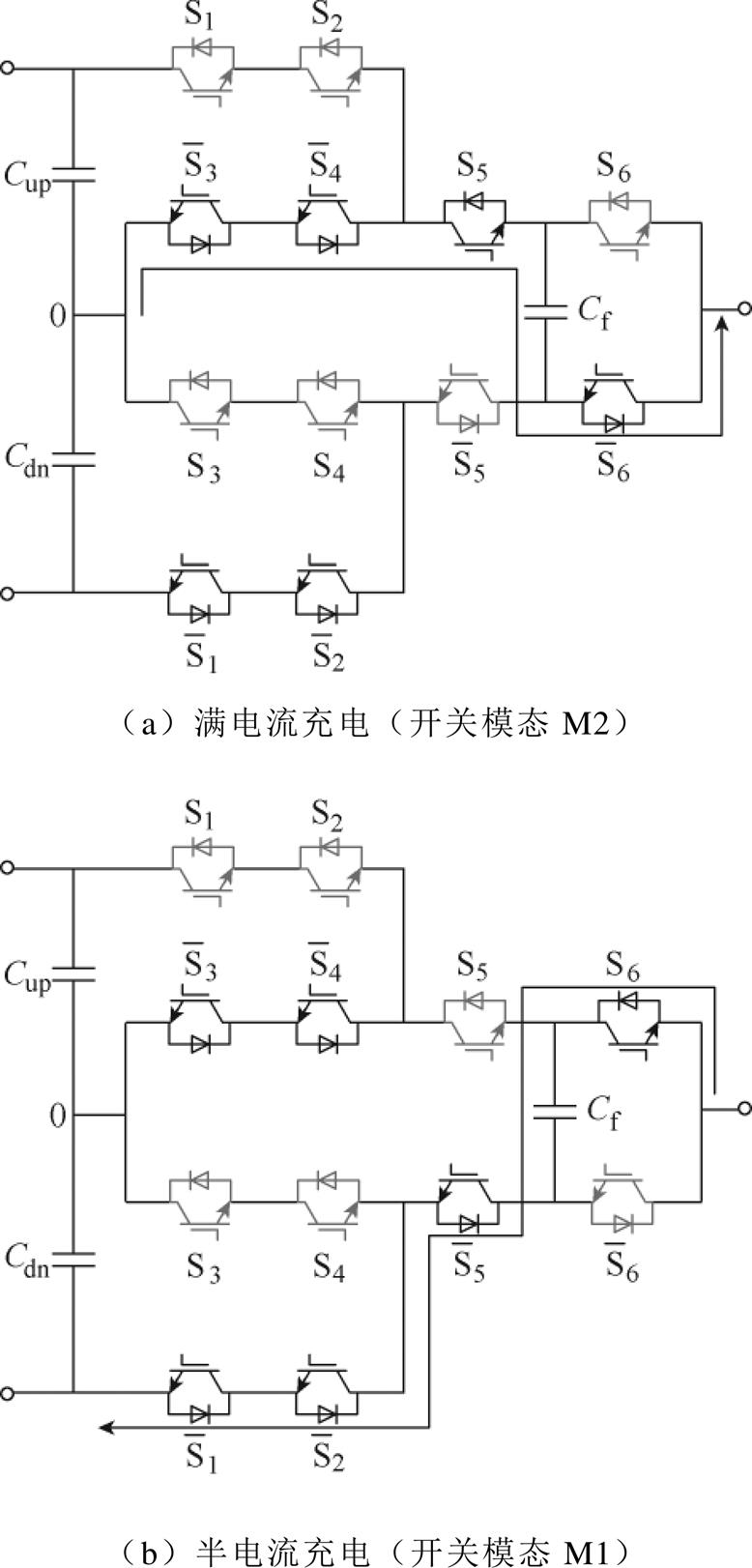
图7 预充电电流路径2示意图
Fig.7 Diagram of pre-charging current path 2
一个开关周期(本文中开关周期为200ms)开始时,根据当前支撑电容中点电位大小选择充电路径1或充电路径2;比较三相悬浮电容电压,电压最小的相进行满电流充电,其余两相进行半电流充电。开关模态选择依据见表2,根据模态动作规则可知,在整个充电过程中,三相悬浮电容会轮流充当电压最小的角色,依次进行满电流充电。
表2 ANPC-5L逆变器开关模态选择依据
Tab.2 Selection basis of ANPC-5L switch mode
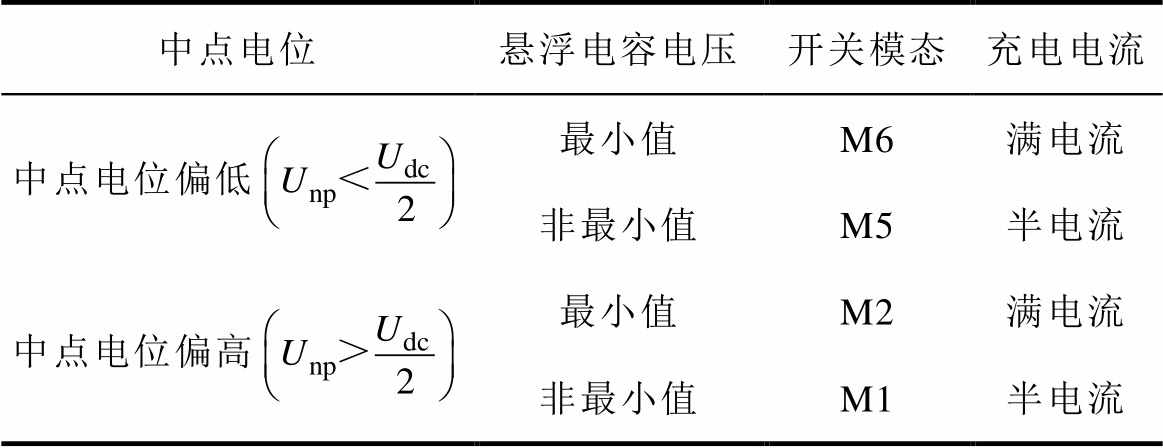
中点电位悬浮电容电压开关模态充电电流 中点电位偏低最小值M6满电流 非最小值M5半电流 中点电位偏高最小值M2满电流 非最小值M1半电流
3.3.1 悬浮电容预充电电流路径
ANPC-5L电容预充电过程中,电能从直流母线流向相支撑电容、悬浮电容和预充电电阻。为保持支撑电容电压平衡,充电过程中会交替采用充电路径1和充电路径2,两个充电路径平均作用时间相等。由于两个充电路径对三相悬浮电容电压的影响是相同的,因此选取充电路径1为例进行分析。
假设当前时刻A相悬浮电容为满电流充电,B相、C相悬浮电容为半电流充电,此时预充电路径1等效电路如图8所示。图中,Rcd为直流侧充电电阻,Idc为母线电流,ICfa、ICfb、ICfc分别为三相悬浮电容的电流。图中三相悬浮电容值相等,设
 ,三相预充电电阻值相等,设
,三相预充电电阻值相等,设
 。
。
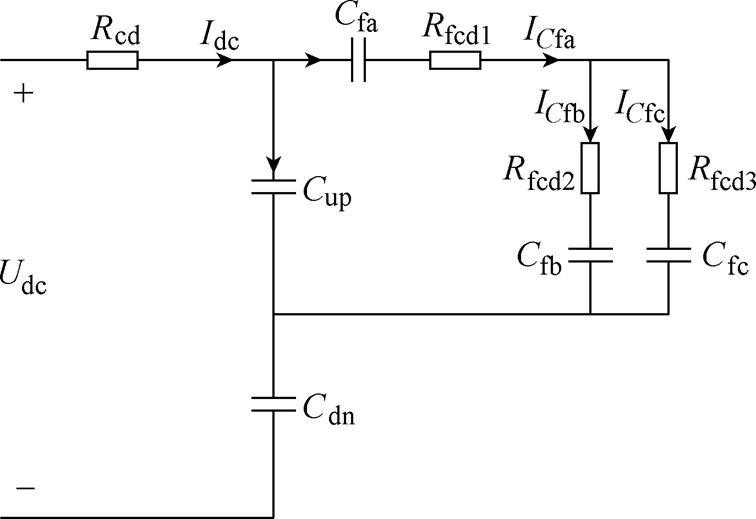
图8 预充电路径1等效电路
Fig.8 Equivalent circuit of pre-charging path 1
3.3.2 悬浮电容电压解析表达式推导分析
由于预充电过程中各桥臂的开关模态在不断变化,因此充电电路是一种线性时变电路,无法使用线性时不变电路理论进行分析。然而,为了表征整个充电过程中悬浮电容电压变化的统一性规律,必须对电路进行简化和等效。由于充电完成后三相悬浮电容电压均为E,所以等效后最终的电容电压同样应为E,简化后的悬浮电容充电回路中应当有两组电阻和电容串联,预充电路径1简化等效电路如图9所示。图中,Iup为支撑电容Cup的电流。

图9 预充电路径1简化等效电路
Fig.9 Simplified equivalent circuit of pre-charging path 1
预充电结束后,来自直流母线的能量一部分存储在电容中,另一部分由预充电电阻损耗掉。所以,在电路等效时必须遵循以下三个原则:一是等效前后,悬浮电容充电回路对外的端口特性保持不变,即等效前后流入悬浮电容充电回路的电流保持一致(即图8中ICfa与图9中悬浮电容充电电流ICf相等);二是充电完成后,图9中的2个等效的电容Ceq的总能量与图8中的3个悬浮电容的总能量相等,如式(1)所示;三是充电过程中,图9中的2个等效电阻Req损耗的能量与图8中的3个电阻损耗的能量相等,如式(2)所示。根据式(1)、式(2),可以确定图9中 和
和 的大小。
的大小。
 (1)
(1)
 (2)
(2)
根据式(1)、式(2)可得,等效后的悬浮电容值 ,等效后的充电电阻值
,等效后的充电电阻值 。
。
由图9可知,电路中存在两个电流路径:一个电流路径是 ,直流母线向两个支撑电容充电;另一个电流路径是
,直流母线向两个支撑电容充电;另一个电流路径是 ,直流母线向三相悬浮电容充电。通过建立简
,直流母线向三相悬浮电容充电。通过建立简
化等效电路的KCL、KVL方程,可以得到关于悬浮电容电压的微分方程。设直流母线电容充电时间常数为 ,悬浮电容充电时间常数为
,悬浮电容充电时间常数为 ,其表达式分别为
,其表达式分别为
 (3)
(3)
 (4)
(4)
根据KCL有
 (5)
(5)
式中,Uup为支撑电容Cup的电压;Ueq为电容Ceq的电压。根据KVL有
 (6)
(6)
 (7)
(7)
根据3.3节的模态动作规则,某一时刻上下半母线电容电压保持近似相等,即 ,联立式(3)~式(7)可得到关于悬浮电容电压的微分方程为
,联立式(3)~式(7)可得到关于悬浮电容电压的微分方程为
 (8)
(8)
求解式(8)可得到悬浮电容电压的时域解析表达式如式(9)所示,其中, 、
、 为式(8)对应的齐次微分方程的特征根,其表达式如式(10)所示,式(10)中,
为式(8)对应的齐次微分方程的特征根,其表达式如式(10)所示,式(10)中, 。C1、C2为待定系数,可根据初始条件求解得到。根据充电初始时刻悬浮电容电压为零可得到初始条件,如式(11)所示。由于
。C1、C2为待定系数,可根据初始条件求解得到。根据充电初始时刻悬浮电容电压为零可得到初始条件,如式(11)所示。由于 的存在,悬浮电容充电支路等效阻抗比Cup所在支路阻抗大,因此充电初始时刻有
的存在,悬浮电容充电支路等效阻抗比Cup所在支路阻抗大,因此充电初始时刻有 ,可近似认为此时
,可近似认为此时 =0,进而得到另一个初始条件,如式(12)所示。
=0,进而得到另一个初始条件,如式(12)所示。
 (9)
(9)
 (10)
(10)
 (11)
(11)
 (12)
(12)
根据式(11)、式(12)可得到系数C1、C2的表达式如式(13)、式(14)所示。因此悬浮电容时域解析表达式可整理如式(15)所示。由式(15)可知,悬浮电容电压变化趋势由充电时间常数 、
、 共同决定。
共同决定。
 (13)
(13)
 (14)
(14)
 (15)
(15)
3.3.3 支撑电容电压解析表达式推导分析
根据KVL方程可求解出支撑电容电压的时域解析表达式(8)。代入数值可知,式(15)中、比较接近,式(15)中第一项对整体作用不明显,因此将式(15)进行简化得到悬浮电容电压表达式为
 (16)
(16)
联立式(5)、式(6)可得
 (17)
(17)
联立式(16)、式(17),根据初始条件 可得到支撑电容电压的时域解析表达式为
可得到支撑电容电压的时域解析表达式为
 (18)
(18)
其中
代入数值计算可知,、 比较接近,所以支撑电容电压趋势由特征根主导,根据表达式可知,支撑电容电压变化趋势由充电时间常数决定。
比较接近,所以支撑电容电压趋势由特征根主导,根据表达式可知,支撑电容电压变化趋势由充电时间常数决定。
3.3.4 预充电电阻设计原则
由3.3.2节可知,直流侧充电电阻Rcd会对整个预充电过程所需的时间产生影响。假设只给支撑电容充电,按照15s(5倍充电时间常数)内完成充电这一要求进行计算,如式(19)所示,得到Rcd的范围,如式(20)所示。然而,考虑到实际充电过程中直流母线同时给交流侧悬浮电容充电,会延缓整个充电进程。因此,确定直流侧充电电阻阻值为180W。
 (19)
(19)
 (20)
(20)
由于开关管 和
和 承受的最大电压应力为支撑电容和悬浮电容电压的差值,即式(18)与式(15)的差值,所以悬浮电容预充电电阻Rfcd会影响开关管电压应力的大小。因此必须使Rfcd足够小,才能保证悬浮电容电压充电速度足够快,避免开关管和的电压应力超过其正常电压应力(E)。然而,由于解析计算出满足要求的电阻值比较困难,因此选取一系列Rfcd数值,代入式(15)和式(18)中求解开关管最大电压应力,不同Rfcd取值下开关管最大电压应力计算结果如图10所示,选择满足要求的充电电阻阻值。根据图10可以选取满足要求的悬浮电容预充电电阻阻值为90W。同时,在仿真和实验中另选择180W 的电阻做性能对比分析。
承受的最大电压应力为支撑电容和悬浮电容电压的差值,即式(18)与式(15)的差值,所以悬浮电容预充电电阻Rfcd会影响开关管电压应力的大小。因此必须使Rfcd足够小,才能保证悬浮电容电压充电速度足够快,避免开关管和的电压应力超过其正常电压应力(E)。然而,由于解析计算出满足要求的电阻值比较困难,因此选取一系列Rfcd数值,代入式(15)和式(18)中求解开关管最大电压应力,不同Rfcd取值下开关管最大电压应力计算结果如图10所示,选择满足要求的充电电阻阻值。根据图10可以选取满足要求的悬浮电容预充电电阻阻值为90W。同时,在仿真和实验中另选择180W 的电阻做性能对比分析。
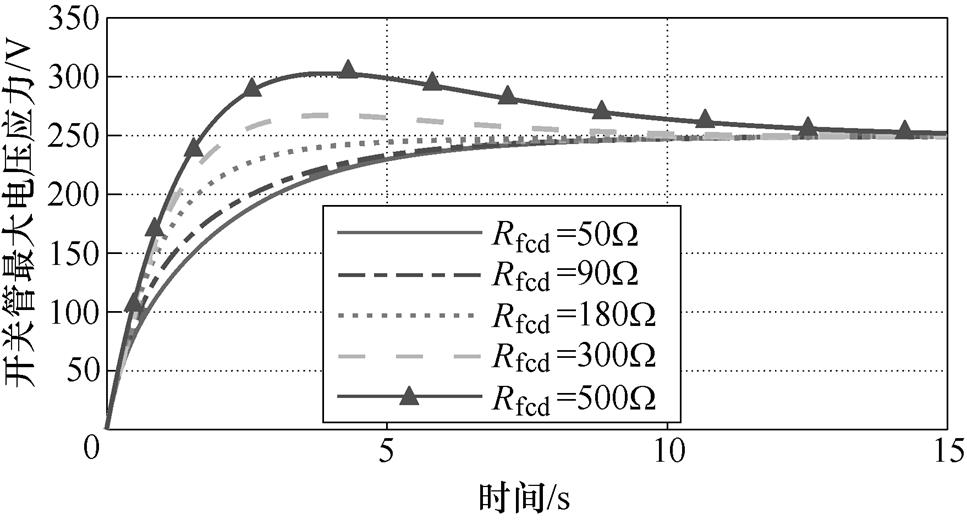
图10 不同Rfcd取值下开关管最大电压应力计算结果
Fig.10 Calculation results of maximum voltage stress of switch components under different Rfcd values
为了证明所提控制策略及理论分析的正确性,本节对ANPC-5L悬浮电容预充电控制策略进行仿真,采用的仿真环境为PLECS 4.1,具体仿真参数见表3。
表3 ANPC-5L逆变器仿真参数
Tab.3 Simulation parameters of ANPC-5L inverter
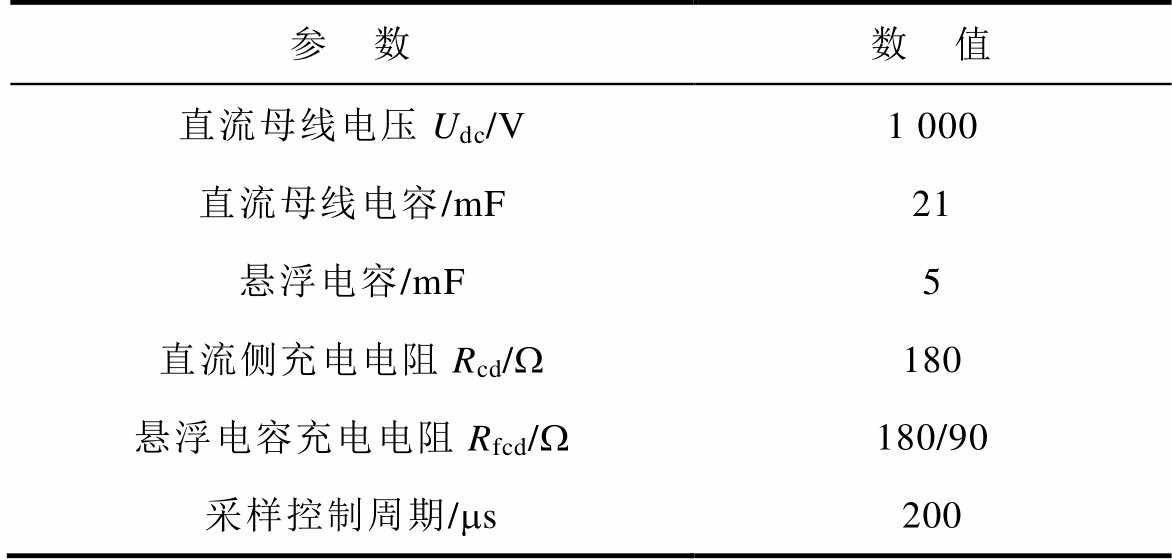
参 数数 值 直流母线电压Udc/V1 000 直流母线电容/mF21 悬浮电容/mF5 直流侧充电电阻Rcd/W180 悬浮电容充电电阻Rfcd/W180/90 采样控制周期/ms200
首先采用悬浮电容充电电阻Rfcd=180W 进行仿真证明,观察预充电过程中支撑电容电压、悬浮电容电压和开关管承受最大电压应力的变化情况。预充电过程中电容电压仿真及解析计算结果如图11所示。由图11可知,充电过程中两个支撑电容电压基本保持一致,保证了支撑电容中点电位始终为直流母线电压的一半。三相悬浮电容电压基本保持一致,且最终达到母线电压的四分之一。图11中虚线为支撑电容电压的解析计算结果,可知解析计算与仿真结果基本保持一致。
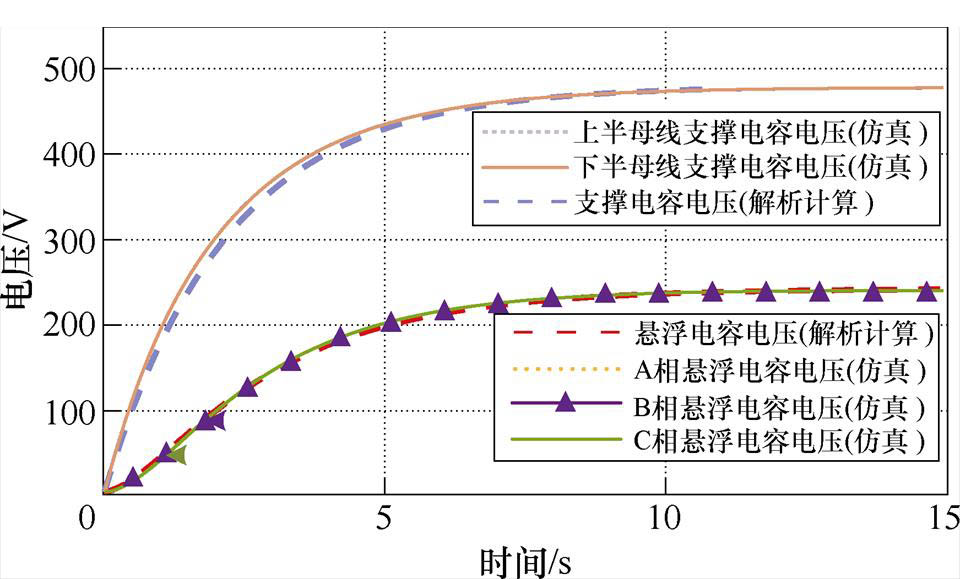
图11 电容电压仿真及解析计算结果(Rfcd=180W)
Fig.11 Simulation and analytical calculation results of capacitor voltage (Rfcd=180W)
将悬浮电容充电电阻调整为90W,其他参数保持不变,重复上述过程进行性能对比分析,得到预充电过程中的电容电压的仿真及解析计算结果如图12所示。由图12可知,减小悬浮电容充电电阻阻值后,悬浮电容充电时间常数减小,悬浮电容预充电速度稍有增加。预充电稳态结果与Rfcd=180W时的结果保持一致。
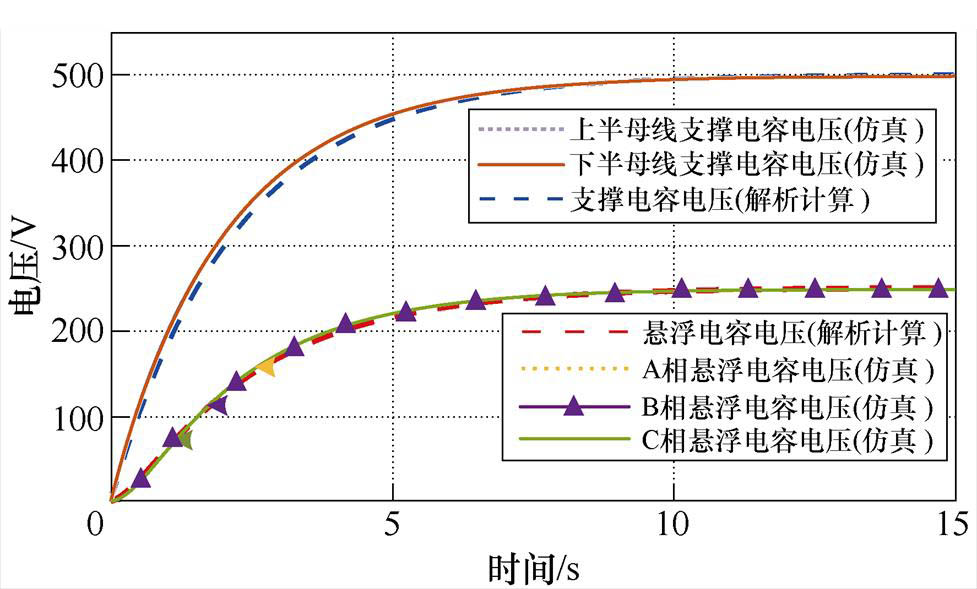
图12 电容电压仿真及解析计算结果(Rfcd=90W)
Fig.12 Simulation and analytical calculation results of capacitor voltage(Rfcd=90W)
根据理论分析可知,预充电过程中开关管承受的最大电压应力为当前时刻支撑电容电压与悬浮电容电压之差。根据该数学关系绘制预充电过程中开关管最大电压应力曲线,如图13所示。由图13可知,预充电过程中开关管承受的最大电压应力随母线电压上升而不断升高且最终均稳定在直流母线电压的四分之一(250V)。悬浮电容充电电阻由180W减小至90W 时,由于悬浮电容充电速度增加,充电过程中悬浮电容电压与支撑电容电压的差值有所减小,可见预充电过程中开关管承受的最大电压应力有所减小,仿真与理论分析结果一致。
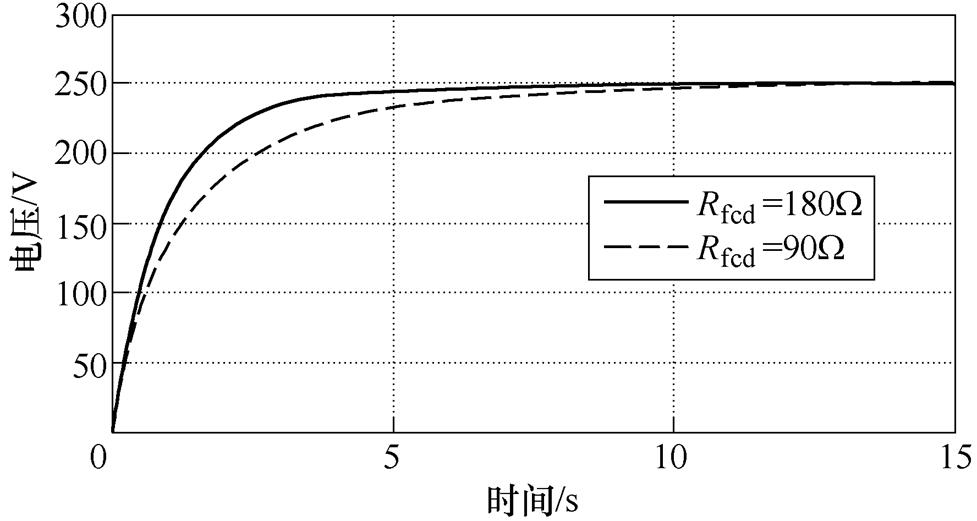
图13 预充电过程开关管最大电压应力仿真结果
Fig.13 Simulation results of maximum voltage stress of switch components in pre-charging process
图14为预充电过程中电压最小的悬浮电容对应相的仿真结果。由图14可知,三相悬浮电容轮流扮演电压最小的角色,按次序进行满电流充电,仿真与理论分析结果一致。
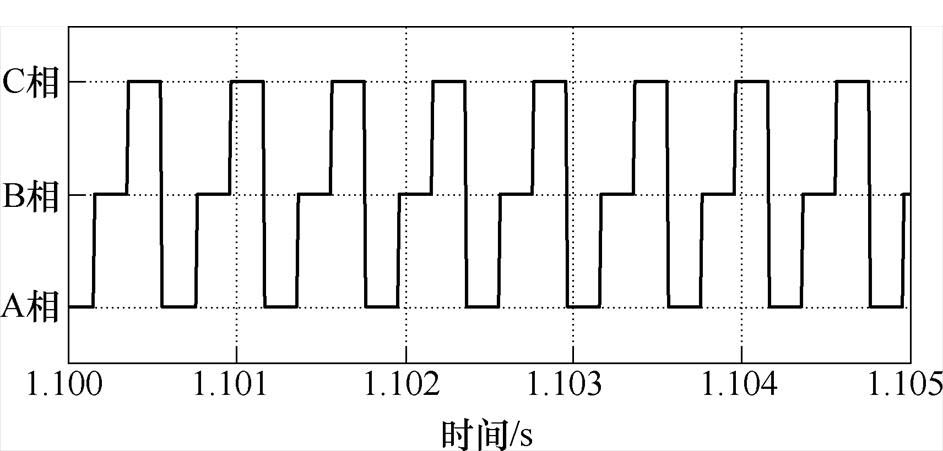
图14 最小悬浮电容电压对应相仿真结果
Fig.14 Simulation results of phase which corresponding to the smallest floating capacitor voltage
通过一台100kW的ANPC-5L三相逆变器样机对所提电容预充电策略进行验证。样机中采用的IGBT型号为FF450R12ME4,母线支撑电容为21mF,悬浮电容容值为5mF,直流充电电阻为180W。实验参数均与仿真参数保持一致,分别在悬浮电容预充电电阻为180W、90W 的工况下进行实验,实验平台如图15所示。
本实验平台的控制器包含1台中央控制器和3台底层控制器,中央控制器是基于TMS320C6678的8核数字信号处理芯片,主频为1GHz,负责核心算法的执行。底层控制器采用FPGA芯片,主要负责模拟采样及开关管驱动脉冲的生成。中央控制器和3台底层控制器采用星形通信架构,点对点之间采用光纤通信,通信速率为20Mbit/s。中央控制器和上位机之间通过以太网进行通信,采用UDP通信协议。
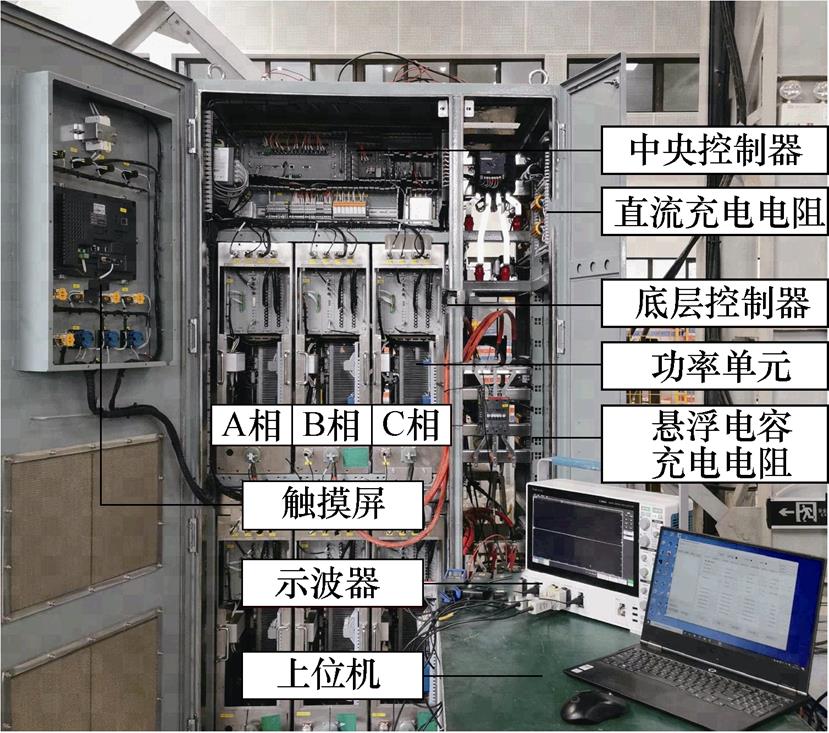
图15 ANPC-5L逆变器实验平台
Fig.15 Experimental platform of ANPC-5L inverter
本实验平台主要通过两种方式记录实验数据:一种是通过泰克MSO44示波器记录实验数据;另一种是将控制芯片内的实时运行数据保存在RAM芯片中,待逆变器运行结束后通过以太网将RAM中的实时数据上传到上位机。
图16为ANPC-5L逆变器悬浮电容预充电过程的支撑电容电压和三相悬浮电容电压的波形。由图16可知,12.5s内所有电容均预充电至目标电压,充电过程中两个支撑电容电压基本一致,保证了支撑电容中点电位始终为直流母线电压的一半。三相悬浮电容电压基本一致,且最终达到母线电压的四分之一,可见实验波形与仿真结果及理论分析相符。
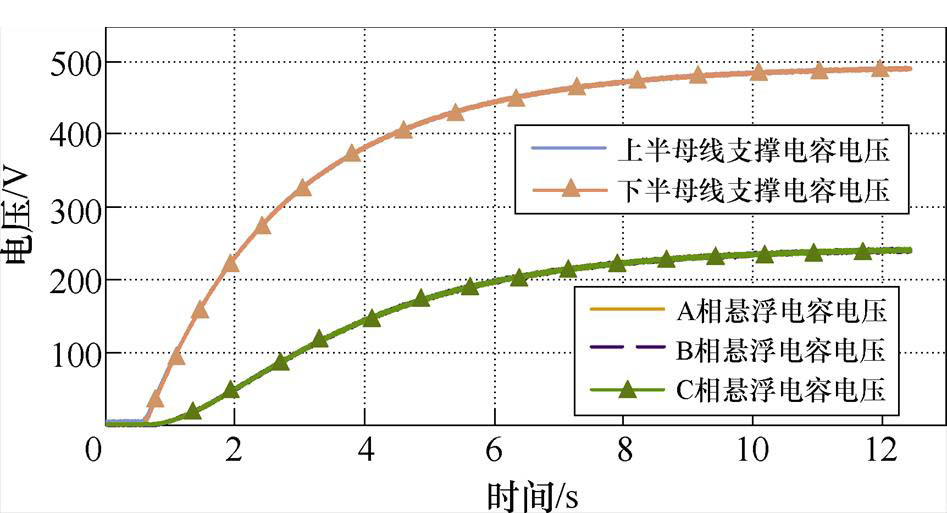
图16 预充电过程电容电压实验波形(Rfcd=180W)
Fig.16 Experimental waveforms of capacitor voltage in pre-charging process (Rfcd=180W)
将悬浮电容充电电阻调整为90W 再次实验,得到预充电过程电容电压波形如图17所示。
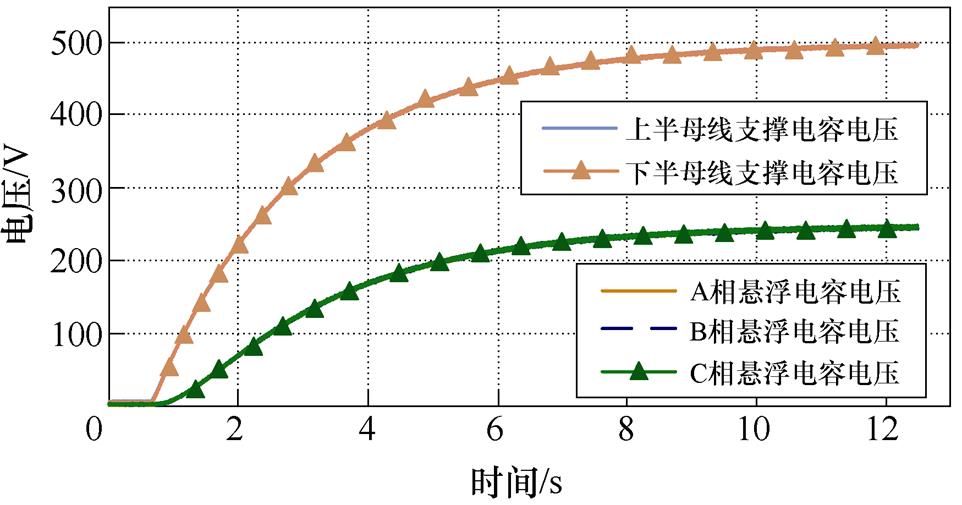
图17 预充电过程电容电压实验波形(Rfcd=90W)
Fig.17 Experimental waveforms of capacitor voltage in pre-charging process (Rfcd=90W)
由图17可知,悬浮电容充电电阻为90W 时,稳态结果与充电电阻为180W 的结果相同,充电过程中悬浮电容电压上升速度略有增加,与仿真相符。
图18为根据预充电过程中支撑电容电压及悬浮电容电压波形绘制的开关管最大电压应力曲线。随着直流母线电压不断升高,最大电压应力从零上升至直流母线电压的四分之一,且悬浮电容充电电阻为90W 时开关管充电过程中,承受的电压应力明显小于悬浮电容充电电阻为180W 时承受的电压应力,可见实验结果与仿真结果及理论分析相符。
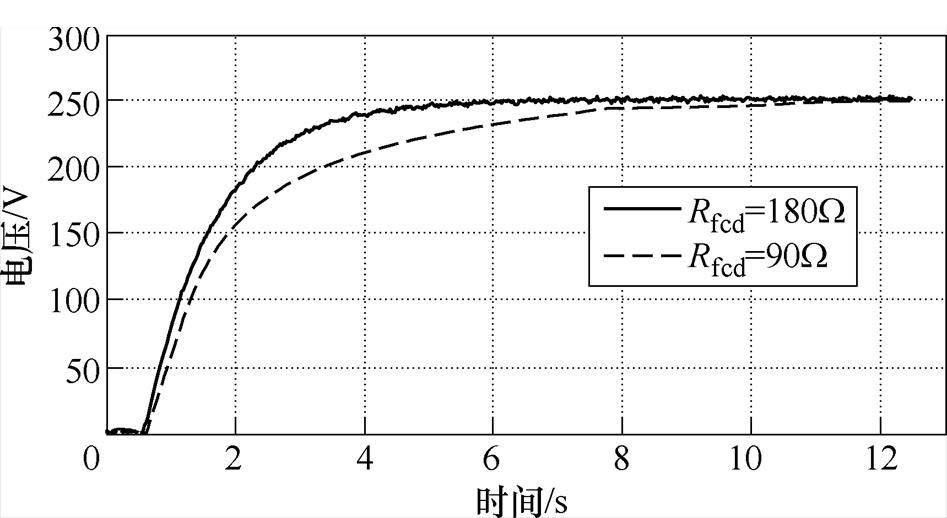
图18 预充电过程开关管最大电压应力曲线
Fig.18 Maximum voltage stress curves of switch components in pre-charging process
本文针对ANPC-5L逆变器悬浮电容预充电策略进行了研究,主要完成了以下几方面的工作:
1)从实际需求角度出发,分析了悬浮电容预充电过程的必要性,剖析了现有ANPC-5L逆变器悬浮电容预充电方案存在的缺陷。
2)提出了一种ANPC-5L逆变器悬浮电容预充电控制策略。给出了充电过程中开关管的动作原则和具体实现方案,推导了充电过程中悬浮电容和支撑电容电压随时间变化的解析表达式,得出了悬浮电容预充电方案的理论依据。
3)从解析计算、仿真分析和实验验证三个角度验证了所提预充电策略的正确性和有效性。所提预充电策略可以在充电过程中保持支撑电容中点电位为母线电压的一半,三相悬浮电容电压保持一致且最终达到母线电压的四分之一。
4)所提预充电策略简单可靠、实现方便。不仅可以避免传统预充电策略中本应互补的两个开关管同时导通的问题,也可以避免预充电过程中开关管承受过高的电压应力的问题。
本文的研究成果对ANPC-5L逆变器的理论研究和工程应用具有一定参考价值。
参考文献
[1] 郑德佑. 五电平有源中点钳位型逆变器调制策略与损耗分析研究[D]. 合肥: 合肥工业大学, 2019.
[2] Kersten A, Grunditz E, Thiringer T. Efficiency of active three-level and five-level NPC inverters compared to a two-level inverter in a vehicle[C]// 2018 20th European Conference on Power Electronics and Applications, Riga, Latvia, 2018: 1-9.
[3] 王付胜, 窦盛, 付航, 等. 一种ANPC-5L逆变器飞跨电容电压与中点电位优化解耦控制算法[J]. 中国电机工程学报, 2019, 39(4): 1150-1162.
Wang Fusheng, Dou Sheng, Fu Hang, et al. An optimized decoupling control algorithm between flying capacitor voltage and neutral-point potential in ANPC-5L inverter[J]. Proceedings of the CSEE, 2019, 39(4): 1150-1162.
[4] Kieferndorf F, Basler M, Serpa L A, et al. A new medium voltage drive system based on ANPC-5L technology[C]//2010 IEEE International Conference on Industrial Technology, Via del Mar, Chile, 2010: 643-649.
[5] Barbosa P, Steimer P, Steinke J, et al. Active- neutral-point-clamped (ANPC) multilevel converter technology[C]//2005 European Conference on Power Electronics and Applications, Dresden, Germany, 2005: 1-10.
[6] 李俊杰, 姜建国, 刘云龙, 等. 具有共模电压减小和电容电压平衡的五电平有源中点钳位型变换器SVPWM算法[J]. 电工技术学报, 2018, 33(13): 3109-3118.
Li Junjie, Jiang Jianguo, Liu Yunlong, et al. A space vector pulse width modulation with common-mode voltage reduction and capacitor voltage balance control for five-level active neutral-point-clamped converter[J]. Transactions of China Electrotechnical Society, 2018, 33(13): 3109-3118.
[7] 谭国俊, 刘战, 叶宗彬, 等. 基于线电压坐标系的ANPC-5L逆变器SVPWM算法的研究[J]. 中国电机工程学报, 2013, 33(30): 26-33.
Tan Guojun, Liu Zhan, Ye Zongbin, et al. SVPWM algorithm based on line voltage coordinate trans- formation for ANPC-5L inverter[J]. Proceedings of the CSEE, 2013, 33(30): 26-33.
[8] 刘计龙, 朱志超, 肖飞, 等. 一种面向舰船综合电力系统的模块化三端口直流变换器[J]. 电工技术学报, 2020, 35(19): 4085-4096.
Liu Jilong, Zhu Zhichao, Xiao Fei, et al. A modular three-port DC-DC converter for vessel integrated power system[J]. Transactions of China Electro- technical Society, 2020, 35(19): 4085-4096.
[9] 张建坡, 崔涤穹, 田新成, 等. 自阻自均压模块化多电平换流器子模块拓扑及控制[J]. 电工技术学报, 2020, 35(18): 3917-3926.
Zhang Jianpo, Cui Diqiong, Tian Xincheng, et al. Self-block and voltage balance modular multilevel converter sub module topology and control[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3917-3926.
[10] Wang Kui, Xu Lie, Zheng Zedong, et al. Capacitor voltage balancing of a five-level ANPC converter using phase-shifted PWM[J]. IEEE Transactions on Power Electronics, 2015, 30(3): 1147-1156.
[11] Wang Kui, Zheng Zedong, Xu Lie, et al. An optimized carrier-based PWM method and voltage balancing control for five-level ANPC converters[J]. IEEE Transactions on Industrial Electronics, 2019, 67(11): 9120-9132.
[12] Abarzadeh M, Javadi A, Al-Haddad K. Novel simplified single carrier PWM method for 5L ANPC converter with capacitor voltage self-balancing and improved output voltage spectrum[C]//2019 IEEE 28th International Symposium on Industrial Elec- tronics (ISIE), Vancouver, BC, Canada, 2019: 2021- 2026.
[13] Khoshkbar-Sadigh A, Naderi R, Dargahi V, et al. Thermal and performance comparison of active neutral-point-clamped (ANPC) and dual flying capa- citor ANPC (DFC-ANPC) inverters[C]//2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 2019: 5522-5528.
[14] 绳伟辉, 葛琼璇. 七电平有源中点钳位型变流器故障状态运行策略[J]. 电工技术学报, 2019, 34(2): 363-376.
Sheng Weihui, Ge Qiongxuan. Fault tolerant operation strategy of seven-level active neutral-point- clamped inverter[J]. Transactions of China Electro- technical Society, 2019, 34(2): 363-376.
[15] 刘战. 有源中点钳位型五电平变频器控制系统研究[D]. 徐州: 中国矿业大学, 2016.
[16] 邵俊波, 徐晓康, 邱长青. 一种新型H桥五电平有源中点钳位逆变器控制策略[J]. 船电技术, 2020, 40(2): 4-7.
Shao Junbo, Xu Xiaokang, Qiu Changqing. A novel control strategy of five-level H-bridge active neutral- point-clamped inverter[J]. Marine Electric & Elec- tronic Engineering, 2020, 40(2): 4-7.
[17] Xue Haihua, Zhang Deqiang, Liu Xi, et al. Capacitor voltage balancing control strategy for single-phase five-level ANPC photovoltaic inverter[C]//2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 2019: 4708-4713.
[18] Yang Yong, Pan Jianyu, Wen Huiqing, et al. Double- vector model predictive control for single-phase five- level actively clamped converters[J]. IEEE Transa- ctions on Transportation Electrification, 2019, 5(4): 1202-1213.
[19] Wang Kui, Li Yongdong, Zheng Zedong, et al. Self-precharge of floating capacitors in a five-level ANPC inverter[C]//Proceedings of The 7th Inter- national Power Electronics and Motion Control Conference, Harbin, China, 2012: 1776-1780.
[20] 王琛琛, 司夏河, 杨超. 五电平有源中点钳位型变换器电容电压平衡控制策略[J]. 北京交通大学学报, 2016, 40(3): 25-31.
Wang Chenchen, Si Xiahe, Yang Chao. Capacitor voltage balancing control strategy of a five-level ANPC converter[J]. Journal of Beijing Jiaotong University, 2016, 40(3): 25-31.
[21] 李杰, 徐渊, 宋文祥. 有源箝位五电平逆变器CHMPWM及悬浮电容电压控制[J]. 电机与控制学报, 2019, 23(9): 92-100.
Li Jie, Xu Yuan, Song Wenxiang. CHMPWM for active-neutral-point-clamped five-level converter and flying capacitor voltage control[J]. Electric Machines and Control, 2019, 23(9): 92-100.
[22] 张航航, 刘小刚, 张新涛, 等. 有源中点箝位式(ANPC)五电平逆变器调制方法和飞跨电容电压控制策略研究[J]. 电源学报, 2015, 13(1): 67-72.
Zhang Hanghang, Liu Xiaogang, Zhang Xintao, et al. Research on modulation method of ANPC five-level inverter and control strategy of flying capacitor voltage[J]. Journal of Power Supply, 2015, 13(1): 67-72.
[23] 刘战, 谭国俊, 张云凤, 等. 有源中点钳位型五电平整流器电容建压方法[J]. 中国电机工程学报, 2016, 36(14): 3888-3899.
Liu Zhan, Tan Guojun, Zhang Yunfeng, et al. A capacitor voltage buildup method for active neutral- point-clamed five-level rectifier[J]. Proceedings of the CSEE, 2016, 36(14): 3888-3899.
Floating Capacitor Pre-Charging Control Strategy for Five-Level Active Neutral-Point-Clamped Inverter
Abstract Active neutral-point-clamped five-level (ANPC-5L) is a new topology suitable for medium and high voltage variable frequency drives. The existing floating capacitor pre-charging methods of ANPC-5L inverter are simple and reliable, and do not need external pre-charging circuits. However, there are also shortcomings such as excessive voltage stress on the switch component and forcing complementary switch component pass-through. Therefore, a floating capacitor pre-charging control strategy is proposed. By setting pre-charging resistors on the AC side, the proposed control strategy can charge DC-link capacitors and floating capacitors simultaneously, which can ensure that the neutral point potential of DC-link capacitors is half of the DC-link voltage and floating capacitor voltage is one fourth of the DC-link voltage during the pre-charging process. The equivalent circuits in pre-charging process are analyzed, the time-domain expressions of capacitor voltage are derived and the theoretical basis for parameter design of the pre-charging circuit is obtained. The proposed pre-charging control strategy is verified by circuit simulation. Meanwhile, experimental verification of the proposed strategy is conducted on a 100kW ANPC-5L inverter prototype.
keywords:Active neutral-point-clamped (ANPC), five-level, floating capacitor, pre-charge, capacitor voltage control
DOI: 10.19595/j.cnki.1000-6753.tces.210276
中图分类号:TM464
李科峰 男,1997年生,博士研究生,研究方向为有源中点钳位逆变器、交流电机驱动控制技术。E-mail: lkf_xaut_2015@163.com
刘计龙 男,1988年生,副研究员,硕士生导师,研究方向为模块化多电平变换器、交流电机驱动控制技术等。E-mail: 66976@163.com(通信作者)
收稿日期 2021-03-03
改稿日期 2021-07-16
国家自然科学基金(51807200)和国防科技卓越青年科学基金(2018-JCJQ-ZQ-002)资助项目。
(编辑 陈 诚)