图1 三相12/10极MHSRM拓扑结构示意图
Fig.1 Topology of three-phase 12/10 MHSRM
摘要 为了提高传统开关磁阻电机(CSRM)的输出转矩、功率密度,降低电机的转矩脉动,该文提出一种新型的三相12/10极模块化定子混合励磁开关磁阻电机(MHSRM)。该电机定子由6个U型定子模块组成,每个U型定子块两极之间的槽口处嵌入永磁体,每个定子块构成独立的磁路,提高了电机的容错性,同时由于永磁体的加入,拥有更大输出转矩和功率密度。该文介绍MHSRM的拓扑结构、工作原理。为了验证该电机的良好性能,运用有限元方法对相同结构尺寸的MHSRM、CSRM和无永磁体的分块定子开关磁阻电机(SRM)的静态电磁场和电磁特性进行对比,并分析了永磁体对MHSRM电磁转矩的影响。最后,制作相同尺寸的MHSRM和CSRM样机各一台,对两种电机的静态电磁特性、稳态和动态性能进行实验测试,并与6/5极结构的MHSRM进行部分性能对比,实验结果验证了有限元计算分析的正确性,证明MHSRM具有相对更好的电磁性能。
关键词:混合励磁开关磁阻电机 模块化定子 永磁体 电磁特性
开关磁阻电机(Switched Reluctance Machine, SRM)具有结构坚固、成本低、可靠性高、调速范围广以及容错性较高等优点,近年来在国内外工业界受到越来越广泛的关注,并逐步在家用电器、伺服系统、牵引电机、高速电机、风力发电、航空航天及电动汽车等领域显示出强大的市场竞争力[1-7]。但同时,传统SRM(Conventional SRM, CSRM)也有转矩脉动大、噪声大和功率密度低等缺点。
为了解决这些问题,提高CSRM的性能,人们将永磁材料(Permanent Magnet, PM)嵌入CSRM的定子中[8-24],形成新的混合励磁SRM(Hybrid- excitation SRM, HSRM)。这种新型电机既保留了CSRM的优点,又将高性能稀土永磁材料应用于电机之中,使得电机的磁场由线圈和永磁体混合励磁产生,该电机的电磁转矩一部分来自原来的磁阻转矩;另一部分来自新加入的永磁体的永磁转矩,因此,相比于CSRM,HSRM的输出转矩明显增大,提高了电机的功率密度,减小了电机的转矩脉动,从而在一定程度上克服了CSRM的缺点,这种新型电机在航空航天、电动汽车等领域具有显著的研究和应用价值。国内外高校、科研院所及企业对HSRM开展了大量的研究。
国外针对HSRM的研究主要集中于两类:一是在定子轭部安装永磁体并加入辅助绕组;二是在定子槽口或定子极中安装永磁体。文献[8-16]的研究结果表明,相比普通SRM,这两类电机由于定子轭部或槽口加入了永磁体以及辅助绕组的作用,输出转矩明显增大,能量密度和转矩密度明显提高,同时效率也得到提高。国内针对HSRM的研究主要集中于两方面:其一是在定子槽口处安装永磁体;其二是在定子齿上安装永磁体。文献[17-24]对这两类HSRM的工作原理、电机结构优化设计、磁路计算及电磁有限元分析、永磁体对电机性能的影响、电机转矩脉动抑制等进行了研究。这些结构的HSRM也显著增大了电机的转矩输出、功率密度等性能。
以上研究的HSRM都是在CSRM的基础上加入永磁体实现的,电机的结构仍然和CSRM类似,定、转子铁心采用整片硅钢片叠压而成。文献[25-26]提出了一种新的6/5极结构的模块化HSRM(Modular HSRM, MHSRM),定子由3个U型模块铁心构成,在每个分块定子铁心两齿之间的槽口嵌入永磁体,转子有5个极,而不是常见的6/4极,相比于CSRM的电励磁方式,该电机由电励磁和永磁体励磁共同作用。研究结果表明,新提出的MHSRM比同尺寸的CSRM拥有更强的容错性能、更大的功率输出和更高的效率,但是该电机由于定、转子极数比较少,导致电机的转矩脉动非常大,转矩密度也较低。
为了提高MHSRM运行时的转矩密度并降低电机的转矩脉动,本文在文献[25-26]的基础上提出一种三相12/10极MHSRM,电机定子由6个U型分块铁心组成,在每个定子块的槽口处嵌入永磁体。相比于CSRM,由于采用了分块定子结构,该电机所用硅钢片材料更少、质量更轻;该电机同样由电励磁和永磁体励磁共同作用,拥有更大的转矩输出和功率密度以及更小的转矩脉动。本文对该电机的结构与原理进行介绍,采用有限元分析(Finite Element Analysis, FEA)方法对该电机磁链和转矩等参数进行计算,并与无永磁的分块SRM(Segmented SRM, SSRM)和CSRM进行对比分析。在此基础上,研制小功率MHSRM与CSRM样机各一台,并开展实验研究,与6/5结构的MHSRM进行部分性能对比,验证其运行原理、电磁分析及仿真结果。
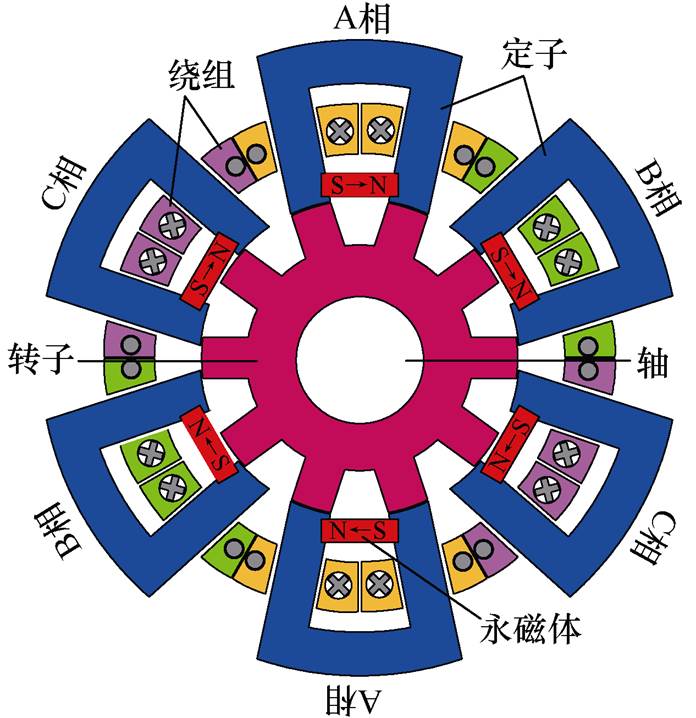
本文以三相12/10极MHSRM为例,对该类电机的性能展开分析研究,图1所示即为MHSRM的定、转子拓扑结构示意图,定子由6个U型完全相同的分块铁心构成,在每个定子模块的两个定子极间的槽口处装有永磁体,定子极上绕有集中绕组,转子上没有绕组也没有永磁体,两个相对的定子块上的4个绕组串联构成一相。永磁体N、S极和绕组电流的方向也如图1中所示,其中,绕组“×”代表电流垂直流进纸面。
图1 三相12/10极MHSRM拓扑结构示意图
Fig.1 Topology of three-phase 12/10 MHSRM
与CSRM的工作原理一样,MHSRM的工作原理也遵循“磁阻最小原理”——磁通总是沿着磁阻最小的路径闭合。MHSRM工作原理及磁通路径如图2所示。MHSRM具体工作原理如下。
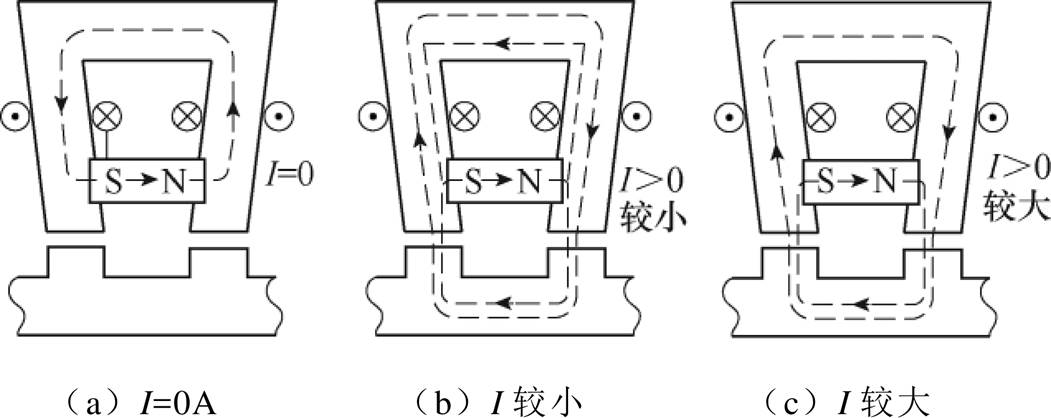
图2 MHSRM工作原理及磁通路径
Fig.2 Operating principle and magnetic circuit of MHSRM
如图2a所示,当绕组中无电流时,永磁体所产生的磁通经过定子块的两个定子极、定子轭和永磁体闭合,此时气隙和转子齿上没有磁通,定、转子极之间没有磁拉力。当绕组中通过较小的电流时,如图2b所示,永磁体所产生的磁通分为两部分:一部分经过定子模块铁心(定子极上部和轭部),这部分磁通和绕组电流所产生的磁通会抵消一小部分;另一部分通过气隙、转子齿和永磁体闭合,此时气隙和转子齿上有绕组电流所产生的磁通和永磁体励磁所产生的磁通,定、转子极之间会产生有磁拉力。其中,内圈虚线代表永磁体产生的磁通路径,外圈虚线代表绕组电流产生的磁通路径。
当绕组中通过较大的电流时,如图2c所示,永磁体所产生的试图通过定子铁心闭合的那一部分磁通被绕组电流所产生的磁通抵消,定子模块铁心中(定子极上部和轭部)的总磁通将会减小;永磁体所产生的另一部分磁通仍然通过气隙、转子齿和永磁体闭合,绕组电流所产生的磁通和永磁体所产生的磁通在气隙和转子齿上的方向一致,磁通增强,从而可以增大定、转子极之间的磁拉力。
当绕组所通电流流向和永磁体N、S极安装方向中的一个与图2a所示的不一致时,绕组电流所产生的磁通和永磁体所产生的磁通在定子模块铁心中形成闭合回路,定、转子极之间没有磁通,也就没有磁拉力。
因此,当按照图1和图2中绕组电流方向通电和永磁体N、S极方向安装时,MHSRM转子极上所产生的磁动势方向与永磁体的磁动势方向一致。这意味着,与CSRM绕组的通电方向可以随意改变的特点不同,MHSRM的永磁体N、S极的安装方向和绕组的通电方向有着严格的规定,当电机的永磁体安装方向确定后,电机绕组的通电方向就被确定,不能随意调整。此外,由图2可以看出,MHSRM每个定子块的磁路互相独立,和其他相没有耦合,因此,大大提高了电机的容错性和可靠性。
根据基尔霍夫电压定律,MHSRM的第k相电压平衡方程为
 k=A, B, C (1)
k=A, B, C (1)
式中,uk、ik、 分别为第k相绕组电压、电流、磁链;R为电机相绕组电阻。
分别为第k相绕组电压、电流、磁链;R为电机相绕组电阻。
由于相间互感极小,可以忽略不计,则MHSRM的第k相磁链为
 (2)
(2)
式中,Lk,k、 分别为第k相绕组自感和磁链;
分别为第k相绕组自感和磁链; 为第k相永磁体产生的磁链。
为第k相永磁体产生的磁链。
MHSRM的磁共能为
 (3)
(3)
式中,Wk为第k相磁共能;Wk,k、WPM,k分别为第k相电励磁磁共能和永磁体磁共能。
根据虚位移法,通过磁共能对转子位置角求偏导可得MHSRM的电磁转矩为

 (4)
(4)
式中,Tk为第k相电磁转矩;Tk,k为第k相电励磁转矩,即磁阻转矩;TPM,k为第k相永磁体转矩,即永磁转矩。
通过电磁转矩公式可以看出,MHSRM的电磁转矩分为两部分:①由通电绕组产生的磁阻转矩;②由永磁体产生的永磁转矩。在普通SRM中,由于没有永磁体,其电磁转矩只是由通电绕组产生的磁阻转矩一部分组成。而MHSRM的电磁转矩不仅包含了由通电绕组产生的磁阻转矩,还包含了由永磁体产生的永磁转矩。因此与普通SRM相比,MHSRM能够产生更大的电磁转矩。
为了验证本文提出的 MHSRM的性能并进行对比,设计了不含永磁体的分块定子SRM(Segmented SRM, SSRM)和相同结构尺寸的CSRM各一台,其结构如图3所示,对三种电机的电磁特性和参数进行了对比分析,三台电机的电磁参数和结构尺寸见表1。本文研究的电机虽然是一种模块化的混合励磁开关磁阻电机,但本质上还是属于SRM范畴。因此,本文电机的总体设计思路是先根据传统SRM的电磁设计方法[27],获得电机的主要尺寸参数,然后采用有限元的方法对关键参数,如定、转子极弧,永磁体厚度等进行有限元参数化分析,进行性能比较后得到最终合适和相对优化的MHSRM电磁结构方案。从表1可以看出,MHSRM虽然添加了永磁体,但是电机总质量仍然比CSRM低约10%。
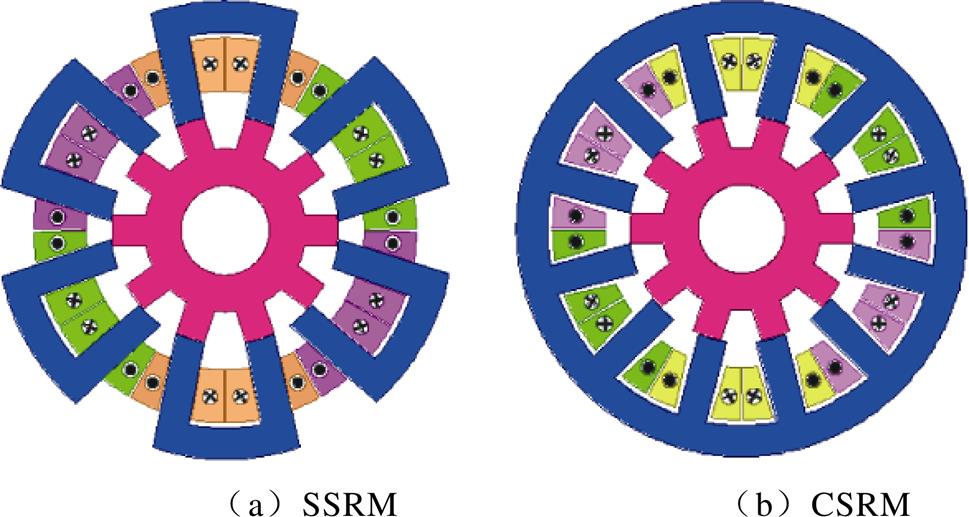
图3 其他两台SRM拓扑结构
Fig.3 Topologies of other two SRMs
表1 三种电机主要参数
Tab.1 The main parameters of three motors
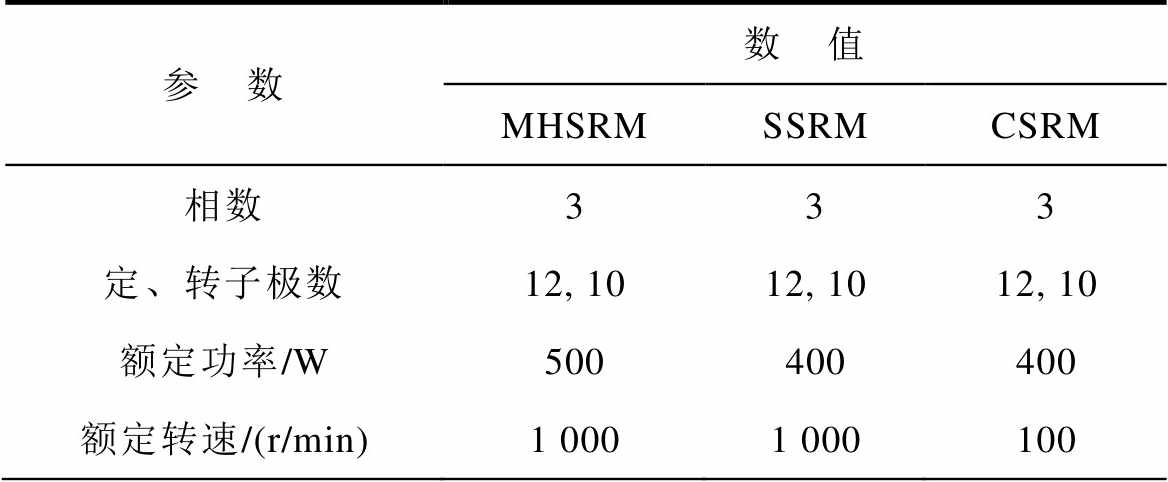
参 数数 值 MHSRMSSRMCSRM 相数333 定、转子极数12, 1012, 1012, 10 额定功率/W500400400 额定转速/(r/min)1 0001 000100
(续)

参 数数 值 MHSRMSSRMCSRM 定子外径/mm124124124 定子内径/mm626262 定子轭高/mm101010 转子外径/mm61.461.461.4 转子轭高/mm8.58.58.5 定、转子极弧/(°)15, 1515, 1515, 15 铁心轴长/mm636363 气隙长度/mm0.30.30.3 每极匝数808080 定子铁心质量/kg2.0522.0102.557 转子铁心质量/kg0.8580.8580.858 铁心材料DW470DW470DW470 永磁材料及质量/kgNdFeB30/0.19—— 电机有效质量/kg4.4254.2354.840
应用FEA方法对三种电机建模并进行电磁场仿真分析,在一个转子极距范围内,电机一相单独导通时,分别计算电机的静态磁场和磁通密度分布。
图4分别是MHSRM、SSRM和CSRM在相同电流激励i=20A下对齐位置时的静态磁力线分布。从图中可以看出:①三种电机的主磁场均为短磁路。②在MHSRM中,永磁体所产生的磁通经过气隙、转子齿和永磁体闭合,此时气隙和转子齿上不仅有绕组电流电励磁所产生的磁通,而且有永磁体励磁所产生的磁通。③在SSRM中,磁场全部由电流激励产生;在CSRM中,除了主磁场,部分磁场经过定子轭部和转子轭部。
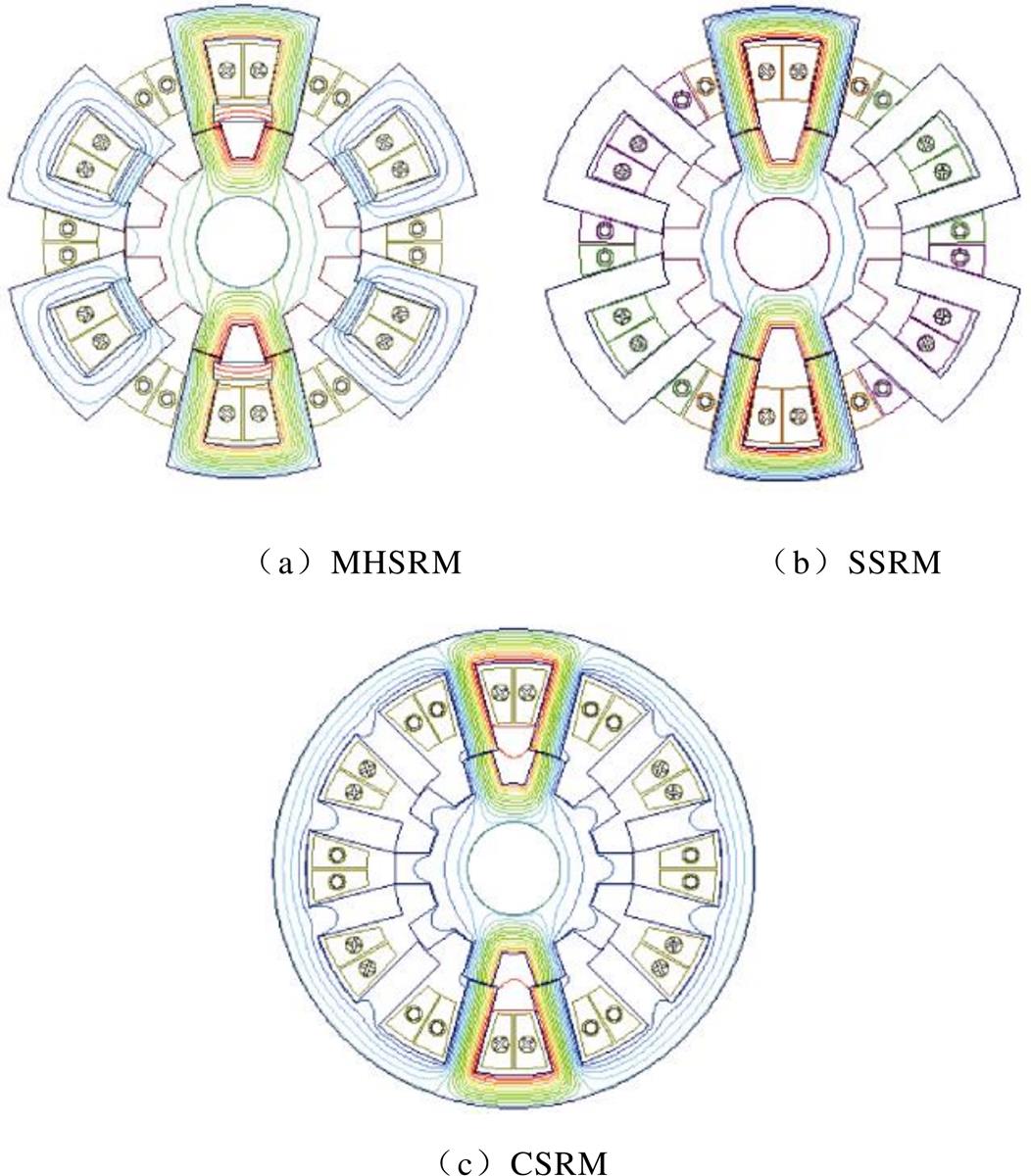
图4 三种电机对齐位置磁力线分布
Fig.4 Flux distributions of three motors at aligned postion
图5分别是三种电机在相同电流激励i=20A下对齐位置时的静态磁通密度分布。从图中可以看出:①由于永磁体的作用,MHSRM定子齿和轭部的平均磁通密度小于SSRM和CSRM。这是因为无论MHSRM绕组流过大电流还是小电流,其电流激励产生的磁场和永磁体产生的磁场会在定子模块铁心中抵消一部分,导致流过定子模块铁心的总磁通减小,磁通密度也会相应减小。②MHSRM的磁通密度最大值位于定子齿的下部,最大磁通密度为1.98T;MHSRM气隙和转子齿磁通密度均大于SSRM和CSRM,故可产生更大的转矩。
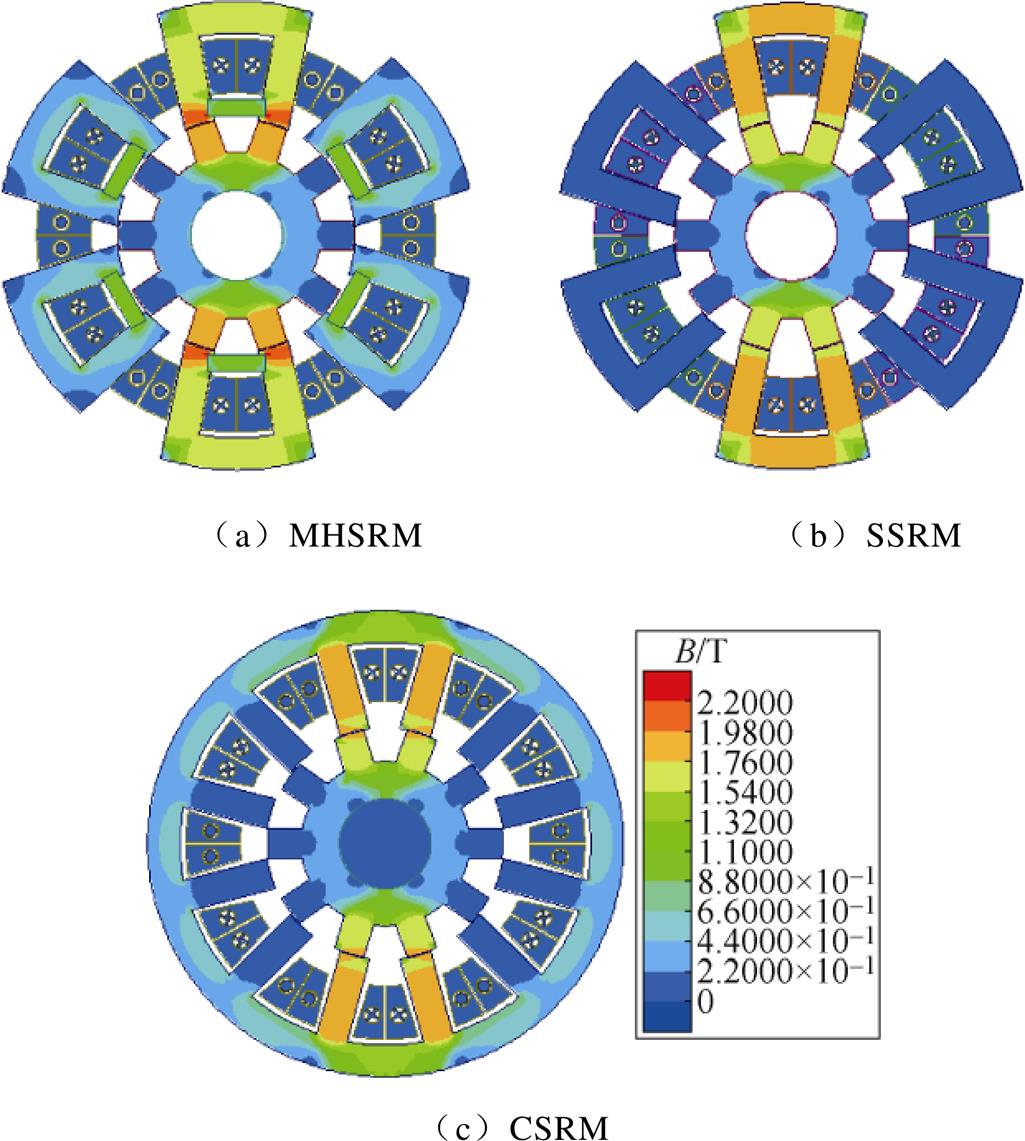
图5 三种电机对齐位置磁通密度分布
Fig.5 Flux density of three motors at aligned postion
在一个转子极距范围内,电机某相单独导通时,分别计算三种电机的静态磁链和静态转矩。三种电机静态电磁特性对比如图6所示。图6a为三种电机在对齐和不对齐位置的静态磁链特性曲线。从图中可以看出:与CSRM和SSRM不同,当电流为0A时,由于永磁体励磁的作用,MHSRM的磁链并不是0Wb,而是-0.1Wb。②MHSRM在对齐和不对齐位置的磁链均小于CSRM和SSRM,说明在相同的电流激励下,CSRM和SSRM比MHSRM更容易饱和。

图6 三种电机静态电磁特性对比
Fig.6 Static magnetic characteristics of three motors
图6b和图6c为三种电机的相静态转矩(i=20A)和一个周期内相平均转矩对比曲线,从图中可以看出:①当通入绕组的电流小于5.5A时,MHSRM的相平均转矩与CSRM和SSRM的平均转矩基本相当。②当绕组电流大于5.5A时,MHSRM的相平均转矩明显大于CSRM和SSRM的平均转矩,而且随着电流的增大,MHSRM与CSRM和SSRM的相平均转矩的差值越大。这就说明了相比于CSRM和SSRM,MHSRM在绕组电流较大时转矩性能更优越。
为了研究永磁体对MHSRM电磁转矩的影响,本文对永磁体厚度进行了仿真计算[28]。本文在永磁体厚度优化过程中,电机绕组的匝数是保持不变的。因此,永磁体的存在会占用一部分槽内的面积,永磁体越厚,留给绕组的空间就越少。永磁体厚度会影响电机的槽满率,从而影响电机的性能。表2给出了槽满率随永磁体厚度变化的关系。可以看出,一方面永磁体厚度的增大会导致电机槽满率的增大;另一方面,随着永磁体厚度的增大,MHSRM的平均转矩也越大,如图7所示,但当永磁体厚度大于4.5mm时,转矩增大的趋势变慢,其值增大不明显。综合考虑不同永磁体厚度时电机的成本、槽满率、输出转矩以及绕组加工、安装工艺等因素,本文选取永磁体厚度为4.5mm。
表2 不同永磁体厚度时的槽满率
Tab.2 Slot filling ratio with different thickness of PM
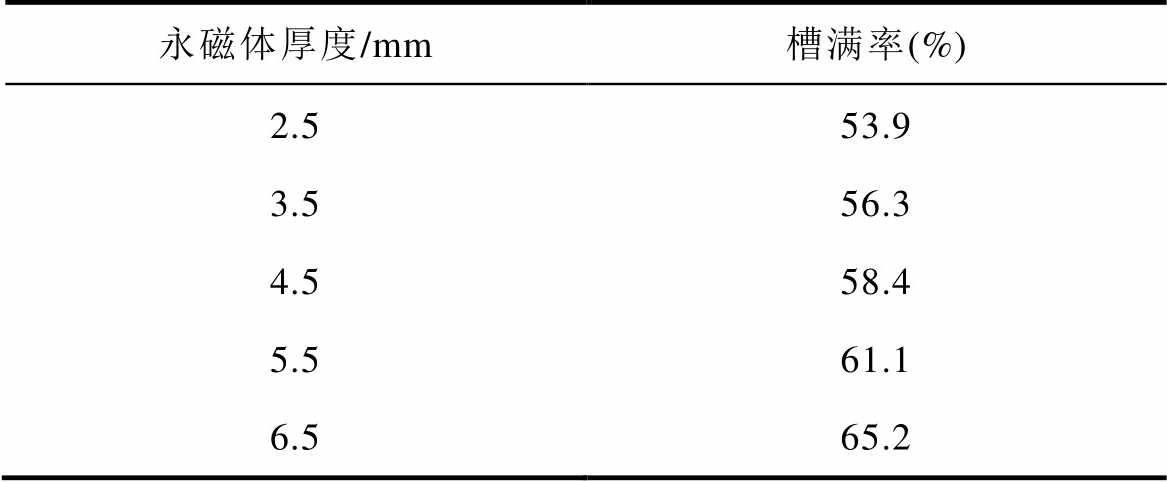
永磁体厚度/mm槽满率(%) 2.553.9 3.556.3 4.558.4 5.561.1 6.565.2

图7 永磁体厚度对MHSRM平均转矩的影响
Fig.7 Static average torque curves of MHSRM with different permanent-magnet thicknesses
定量分析MHSRM中磁阻转矩与永磁转矩的比例关系,磁阻转矩、永磁转矩以及总转矩的静态转矩特性和平均转矩特性曲线,如图8和图9所示。表3列出了不同电流下,总转矩大小、磁阻转矩与永磁转矩各自所占含量比例。从图8、图9和表3可以看出,MHSRM磁阻转矩大大高于永磁转矩,当电流为4A时,磁阻转矩与永磁转矩所占比例分别为95%和5%;当电流为24A时,磁阻转矩与永磁转矩所占比例分别为80%和20%。可见,MHSRM的磁阻转矩占主要部分,随着电流的增大,磁阻转矩所占的比例有所减小,但仍然起主要作用,永磁体只是起辅助作用。

图8 磁阻转矩与永磁转矩特性曲线
Fig.8 Reluctance torque and PM torque curves
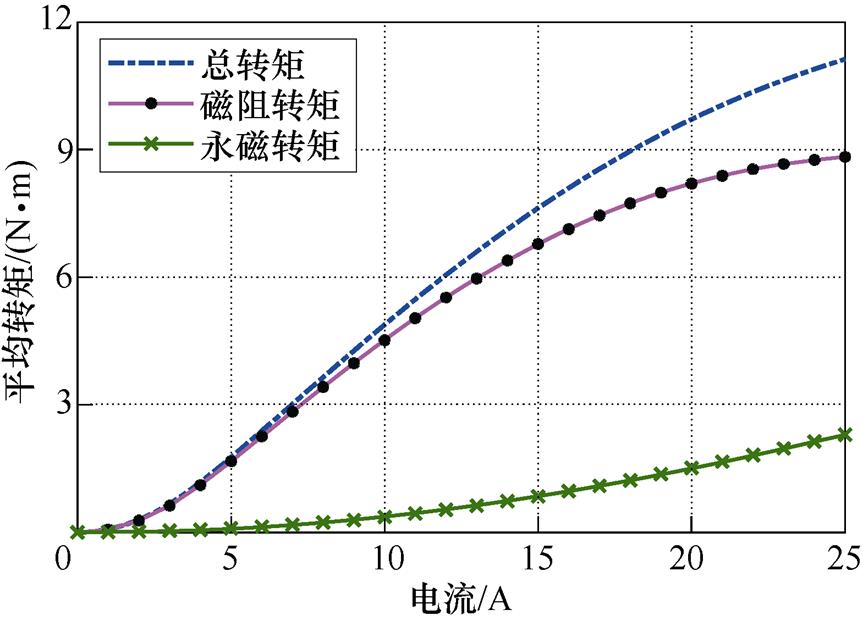
图9 三种转矩平均转矩曲线
Fig.9 Three types of average torque curves
表3 磁阻转矩与永磁转矩定量比较
Tab.3 Quantitative comparison of reluctance torque and PM torque
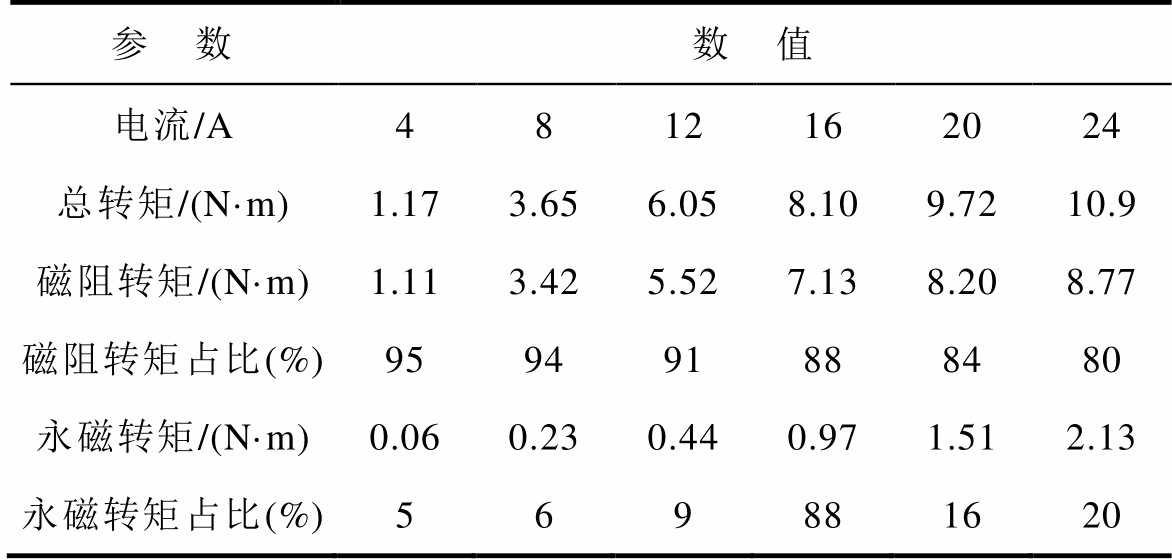
参 数数 值 电流/A4812162024 总转矩/(N·m)1.173.656.058.109.7210.9 磁阻转矩/(N·m)1.113.425.527.138.208.77 磁阻转矩占比(%)959491888480 永磁转矩/(N·m)0.060.230.440.971.512.13 永磁转矩占比(%)569881620
为了验证MHSRM的电磁静、动态性能和上述理论分析的正确性,制作了结构参数相同的MHSRM和CSRM样机各一台,样机如图10所示,样机参数见表1。
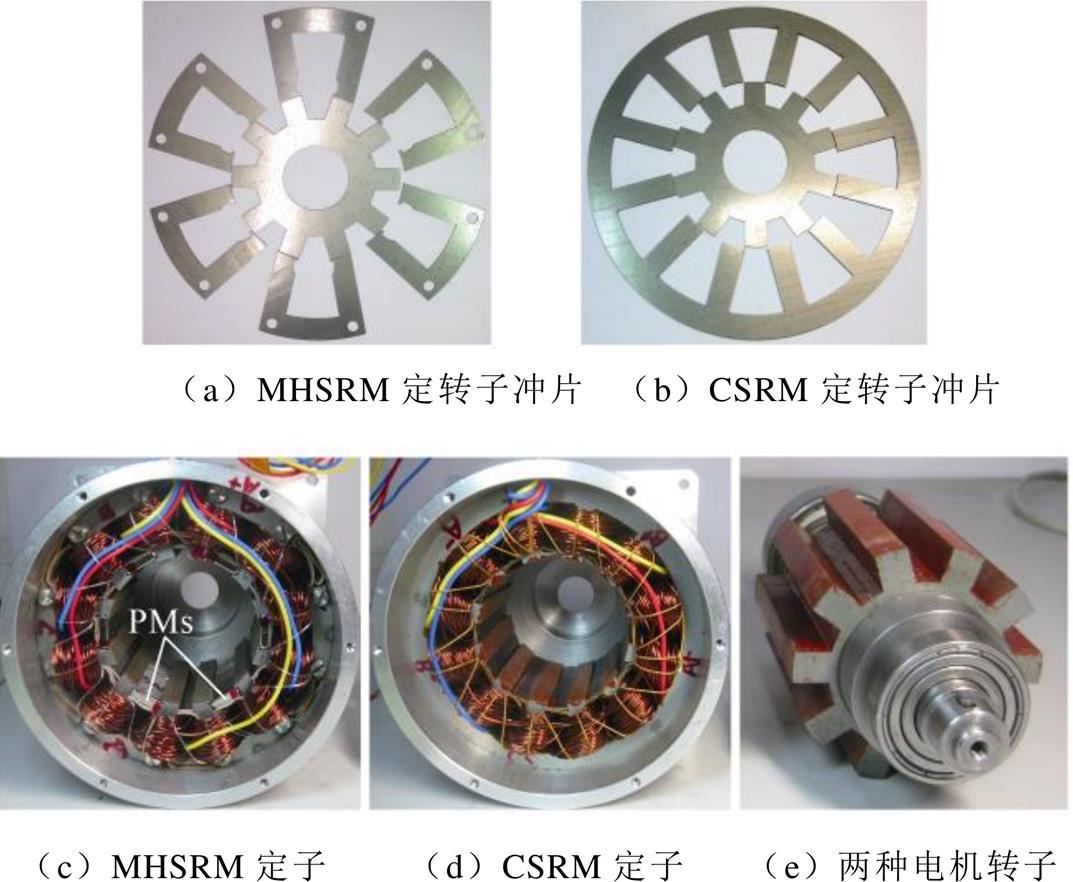
图10 MHSRM和CSRM样机
Fig.10 Photographs of MHSRM and CSRM prototypes
为了得到MHSRM样机的磁链、转矩特性,进行了静态测量实验。本文采用一种间接法来测量样机的静态磁链和转矩,图11为这种测量方法的实验装置。首先,利用分度头将电机转子固定在一个特定的位置。然后,通过一个充满电的电容给电机一相绕组放电,测量并记录放电过程中的电机相电压和相电流波形。最后,特定位置的电机磁链y 可以表示为
 (5)
(5)
式中, 、u、i分别为相磁链、相电压、相电流;
、u、i分别为相磁链、相电压、相电流; 为转子位置;R为相绕组电阻;
为转子位置;R为相绕组电阻; 为初始磁链。
为初始磁链。

图11 电磁特性测量实验平台
Fig.11 Experimental platform for magnetic characterisitcs measurement
图12为采用间接法测量MHSRM电磁特性时在对齐和不对齐位置的相电压和相电流波形。图13a为两种电机在对齐与不对齐位置磁链仿真与实测曲线,图13b为两种电机在电流i=20A转矩仿真与实验曲线,图13c为两种电机平均转矩仿真与实验曲线。从图中可以看出:MHSRM静态磁链在对齐和不对齐位置时仿真和实测的最大误差分别为3.9%和4.8%,CSRM的静态磁链仿真和实测的最大误差分别为3.7%和5.1%。两电机静态转矩实测与仿真数据也基本吻合,验证第2.2节所述的理论分析和仿真结果的正确性。
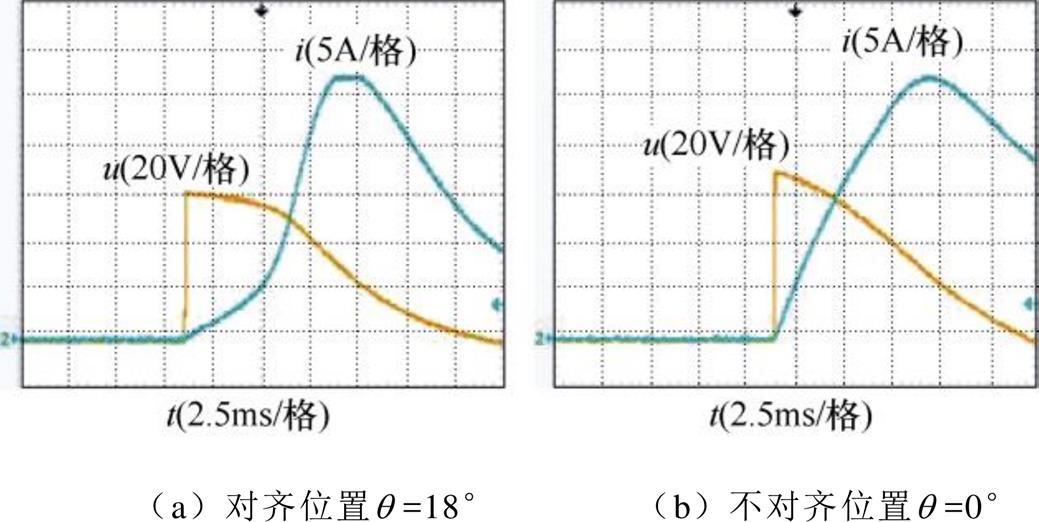
图12 MHSRM磁链测量时相电压和相电流波形
Fig.12 Recorded phase voltage and current in MSHSRM flux linkage measurement

图13 两种电机电磁特性仿真与实测对比
Fig.13 Simualtion and measured resluts of magnetic characteristics of two motors
为了进一步验证MHSRM的性能,并进行对比研究,搭建了基于dSPACE的MHSRM和CSRM控制系统实验平台,如图14所示,主要包括测功机、实验电机、示波器、功率变换器、dSPACE实时控制器、电流钳及变压器等。
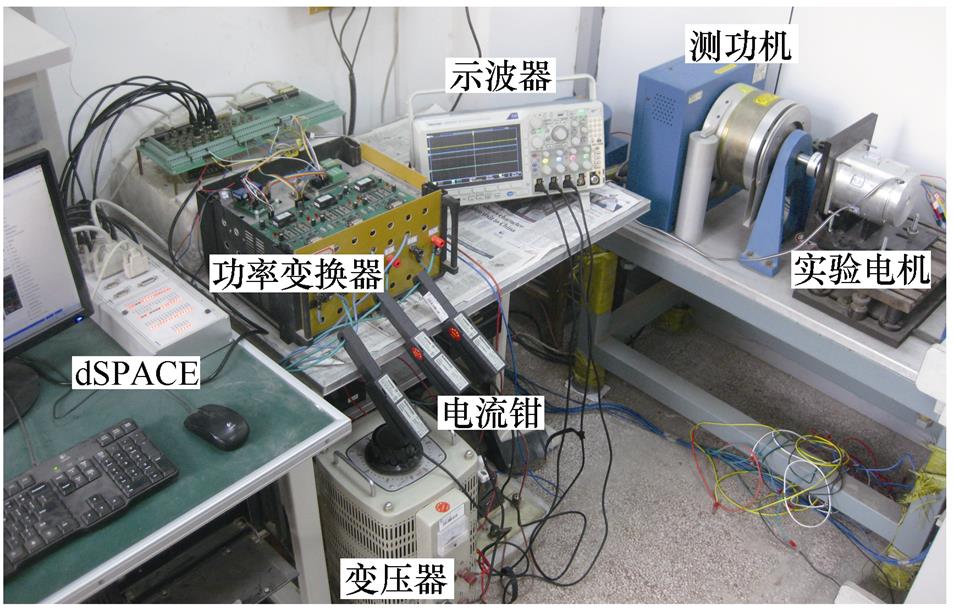
图14 两种电机系统实验平台
Fig.14 Experimental platform of two motor systems
图15分别为两种电机低速电流斩波控制下的对比实验结果,其中,直流母线电压为135V,转速为500r/min,开通、关断角分别为0°和12°,电流斩波限为12A,测得MHSRM的平均转矩为6.74N·m,CSRM的平均转矩为4.43N·m,两种电机转矩脉动分别为116%和159%。说明在斩波控制下,相比于CSRM,MHSRM具有更大的输出转矩和更低的转矩脉动。

图15 两种电机低速斩波运行实验波形
Fig.15 Experimental waveforms of two motors with low speed
图16分别为两种电机在角度位置控制下的对比实验结果,其中,直流母线电压为150V,转速为1 000r/min,开通、关断角分别为0°和12°,测得MHSRM平均转矩为4.03N·m,CSRM平均转矩为2.29N·m,两种电机转矩脉动分别为114%和168%。同样说明,在角度位置控制下,相比于CSRM,MHSRM也具有更大的输出转矩和更低的转矩脉动。
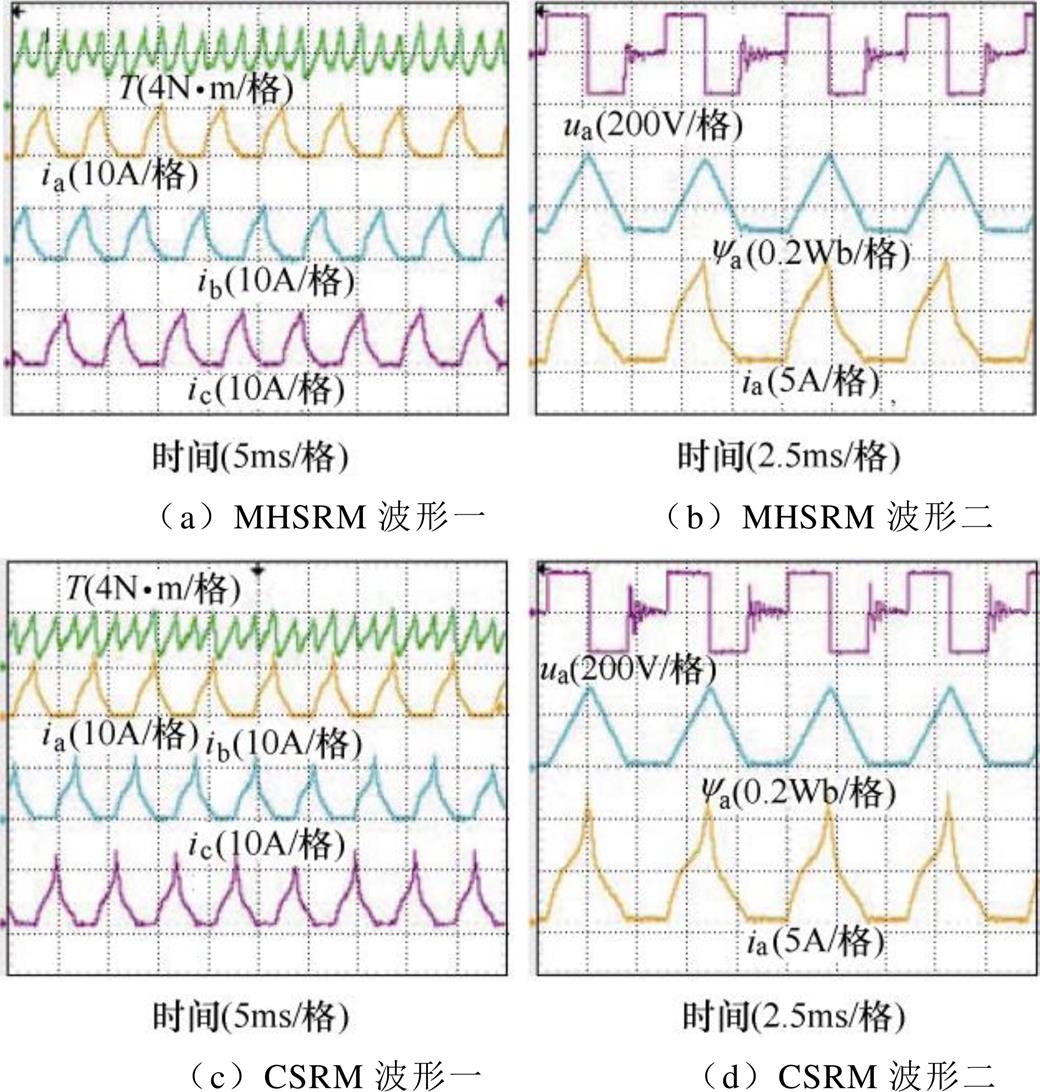
图16 两种电机角度位置控制实验波形
Fig.16 Experimental waveforms of two motors with high speed
表4给出了两种电机实测综合性能的对比,从表中可以看出,MHSRM不仅具有更高的输出转矩和更低的转矩脉动,还具有更高的输出功率和更高的转矩/功率密度。
表4 两种电机实测性能比较
Tab.4 Measured performance of two motors

参 数数 值 MHSRMCSRM 母线电压U/V135150135150 电机转速n/(r/min)5001 0005001 000 相电流有效值Irms/A6.124.455.994.72 平均转矩Tav/(N·m)6.744.034.432.29 转矩电流比Tav/Irms(N·m/A)1.100.910.740.49 转矩脉动Tr(%)116114159168 输出功率Pout/W353422232240 转矩密度TD/(N·m/kg)1.530.910.920.47 功率密度PD/(W/kg)80.095.547.949.6
为了验证MHSRM的起动性能,对两种电机进行了开环和闭环起动实验。图17为两种电机的开环起动实验结果,其中,直流母线电压为125V,负载1.3N·m。可以看出,MHSRM最后达到稳态的转速为1 350r/min,而CSRM的稳态转速只有1 000r/min。这是因为SRM起动阶段一般采用的是电流斩波控制方式,由2.2节分析可知,在相同的电流激励下,本文的MHSRM比CSRM具有更大的输出转矩。因此,在起动阶段电流斩波控制下,两种电机的电流基本相同,导致电机的输出转矩不一样,从而造成MHSRM具有更强的起动响应能力和带载能力。
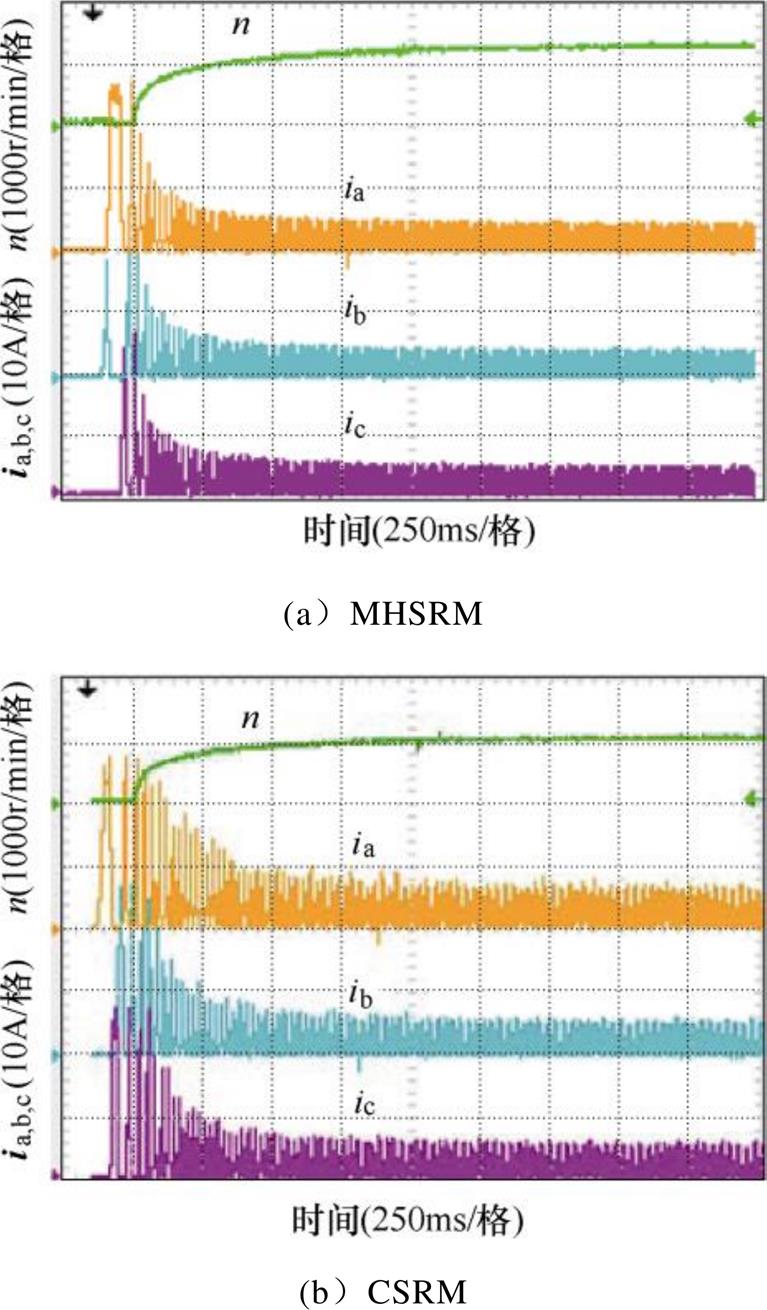
图17 两种电机开环起动特性
Fig.17 Open-loop starting performances of two motors
图18为两种电机闭环起动下的转速响应和三相电流实验波形,其中,直流母线电压为150V,给定转速命令为1 200r/min,负载为1.3N·m。可以看出,MHSRM闭环起动过程迅速,转速在0.25s之内达到给定转速1 200r/min,三相电流峰值为4.5A左右;CSRM转速在0.5s之内达到给定转速,三相电流峰值为8A左右。说明,相比于CSRM,MHSRM闭环起动过程更快、用时更短,即MHSRM有更快的起动性能,达到稳态时电流也更小。

图18 两种电机闭环起动特性
Fig.18 Closed-loop starting performances of two motors
文献[25-26]对一种6/5极结构的MHSRM动态性能进行了仿真和实验测试,在额定转速时的转矩脉动和转矩密度分别为257%和0.405N·m/kg;而本文的12/10极MHSRM在额定转速时的转矩脉动为114%,转矩密度为0.91N·m/kg,如图16a和图16b所示。因此,本文提出的12/10极MHSRM在转矩脉动方面大大的降低,而转矩密度则有很大的提高。表5为两种电机部分实测性能比较。
表5 两种MHSRM部分实测性能比较
Tab.5 Performance comparison of two MHSRMs

参 数数 值 12/10 MHSRM6/5 MHSRM[23] 母线电压U/V150300 电机额定转速n/(r/min)1 0003 000 开通、关断角/(°)0, 124, 28 相电流有效值Irms/A4.453.93 平均转矩Tav/(N·m)4.033.50 转矩电流比Tav/Irms(N·m/A)0.910.89 电机质量M/kg4.4258.645 转矩脉动Tr(%)114257 转矩密度TD/(N·m/kg)0.910.405
为了改善CSRM的缺点,提高电机输出性能,本文提出了一种三相12/10极MHSRM,电机定子由6个分块铁心模块组成,在每个定子模块的槽口处嵌入永磁体。相比于CSRM,由于采用了分块定子结构,该电机所用硅钢片材料更少、质量更轻;每个定子块构成独立的磁路,提高了电机的容错性,同时由于永磁体的加入,拥有更大输出转矩和功率密度。本文对电机的结构与原理进行了介绍,采用FEA方法对该电机磁链和转矩等参数进行了计算,并与无永磁的SSRM和CSRM进行对比分析。在此基础上,制作小功率MHSRM与CSRM样机各一台,并进行了稳态和动态性能实验验证。结果表明,在相同情况下,相比于CSRM和6/5极MHSRM,本文提出的12/10极MHSRM具有更大的输出转矩、更小的转矩脉动、更大的转矩密度、更强的起动响应和带载能力等。
参考文献
[1] 匡斯建, 张小平, 刘苹, 等. 基于相电感非饱和区定位的开关磁阻电机无位置传感器控制方法[J]. 电工技术学报, 2020, 35(20): 4296-4305.
Kuang Sijian, Zhang Xiaoping, Liu Ping, et al. Sensorless control method of switched reluctance motors based on location of phase inductance charac- teristic points[J]. Transactions of China Electro- technical Society, 2020, 35(20): 4296-4305.
[2] 卿龙, 王惠民, 葛兴来. 一种高效率开关磁阻电机转矩脉动抑制方法[J]. 电工技术学报, 2020, 35(9): 1912-1920.
Qing Long, Wang Huimin, Ge Xinglai. A high efficiency torque ripple suppression method for switched reluctance motor[J]. Transactions of China Electrotechnical Society, 2020, 35(9): 1912-1920.
[3] 许爱德, 任萍, 陈加贵, 等. 基于电感特殊位置点的开关磁阻电机转子位置检测及误差补偿[J]. 电工技术学报, 2020, 35(8): 1613-1623.
Xu Aide, Ren Ping, Chen Jiagui, et al. Rotor position detection and error compensation of switched relu- ctance motor based on special inductance position[J]. Transactions of China Electrotechnical Society, 2020, 35(8): 1613-1623
[4] 匡斯建, 张小平, 张铸, 等. 基于相电感交点位置角度补偿的开关磁阻电机无位置传感器控制方法[J]. 电工技术学报, 2019, 34(23): 4909-4917.
Kuang Sijian, Zhang Xiaoping, Zhang Zhu, et al. Sensorless control of switched reluctance motor based on intersection angle compensation of phase indu- ctor[J]. Transactions of China Electrotechnical Society, 2019, 34(23): 4909-4917.
[5] 田德翔, 曲兵妮, 宋建成, 等. 基于电流斩波控制的开关磁阻电机脉冲宽度调制占空比解析计算法[J]. 电工技术学报, 2019, 34(21): 4449-4457.
Tian Dexiang, Qu Bingni, Song Jiancheng, et al. An analytical method of PWM duty cycle for switched reluctance motors based on current chopping con- trol[J]. Transactions of China Electrotechnical Society, 2019, 34(21): 4449-4457.
[6] Wu Jiangling, Sun Xiaodong, Zhu Jianguo. Accurate torque modeling with PSO-based recursive robust LSSVR for a segmented-rotor switched reluctance motor[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(2): 96-104.
[7] Huang Xuanrui, Lin Zechuan, Xiao Xi. Four-quadrant force control with minimal ripple for linear switched reluctance machines[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(1): 27-34.
[8] Hasegawa Y, Nakamura K, Ichinokura O. A novel switched reluctance motor with auxiliary windings and permanent magnets[J]. IEEE Transactions on Magnetics, 2012, 48(11): 3855-3858.
[9] Nakamura K, Ichinikura O. Super-multipolar per- manent magnet reluctance generator designed for small-scale wind-turbine generation[J]. IEEE Transa- ctions on Magnetics, 2012, 48(11): 3311-3314.
[10] Lu Kaiyuan, Rasmussen P O, Watkins S, et al. A new low-cost hybrid switched reluctance motor for adjustable-speed pump applications[J]. IEEE Transa- ctions on Industry Applications, 2011, 47(1): 314- 321.
[11] Najamura K, Murota K, Ichinokura O. Characteristics of a novel switched reluctance motor having per- manent magnets between the stator pole-tips[C]// European Conference on Power Electronics and Applications, Aalborg, Denmark, 2007: 1-5.
[12] Ullah S, McDonald S P, Martin R, et al. A permanent magnet assist, segmented rotor, switched reluctance drive for fault tolerant aerospace applications[J]. IEEE Transactions on Industry Applications, 2019, 55(1): 298-305.
[13] Maspimi M, Mirsalim M. E-core hybrid reluctance motor with permanent magnets inside stator common poles[J]. IEEE Transactions on Energy Conversions, 2018, 33(2): 826-833.
[14] Kondelaji M A, Farahani E F, Mirsalim M. Perfor- mance analysis of a new switched reluctance motor with two sets of embedded permanent magnets[J]. IEEE Transactions on Energy Conversions, 2020, 35(2): 818-827.
[15] Farahani E F, Kondelaji M A, Mirsalim M. An innovative hybrid-excited multi-tooth switched relu- ctance motor for torque enhancement[J]. IEEE Transactions on Industrial Electronics, 2021, 68(2): 982-992.
[16] Farahani E F, Kondelaji M A, Mirsalim M. A new exterior-rotor multiple teeth switched reluctance motor with embedded permanent magnets for torque enhancement[J]. IEEE Transactions on Magnetics, 2020, 56(2): 8100405.
[17] 李明哲. 混合励磁开关磁阻电机的基础研究[D]. 哈尔滨: 哈尔滨工业大学, 2006.
[18] 赵哲. 混合励磁开关磁阻电机转矩脉动抑制策略的研究[D]. 哈尔滨: 哈尔滨工业大学, 2009.
[19] 嵇恒. 新型混合励磁开关磁阻电机的基础研究[D]. 哈尔滨: 哈尔滨工业大学, 2010.
[20] 吴太箭. 混合励磁开关磁阻电机的四电平驱动控制技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2013.
[21] 吴红星, 赵凯岐, 王胜劲, 等. 一种新型混合励磁开关磁阻电机[J]. 电工技术学报, 2013, 28(7): 56-63.
Wu Hongxing, Zhao Kaiqi, Wang Shengjin, et al. A novel hybrid excitation siwtched reluctance motor[J]. Transactions of China Electrotechnical Society, 2013, 28(7): 56-63.
[22] 吴立峰. 混合励磁开关磁阻电机的直接转矩控制系统研究[D]. 南昌: 南昌大学, 2016.
[23] Pang Mingqi, Wang Huijun, Zhou Guangxu, et al. Design and analysis of a two-phase permanent magnet assisted switched reluctance motor[C]//International Conference on Electrical Machines and Systems (ICEMs), Jeju, Korea, 2018: 1956-1961.
[24] Zhu Jingwei, Cheng Kawai Eric, Xue Xiangdang. Design and analysis of a new enhanced torque hybrid switched reluctance motor[J]. IEEE Transactions on Energy Conversions, 2018, 33(4): 1965-1977.
[25] Andrada P, Blanque B, Martinez E, et al. New hybrid reluctance motor drive[C]//International Conference on Electrical Machines(ICEM), Marseille, France, 2012: 2689-2694.
[26] Andrada P, Blanque B, Martinez E, et al. A novel type of hybrid reluctance motor drive[J]. IEEE Transa- ctions on Industrial Electronics, 2014, 61(8): 4337- 4345.
[27] 吴建华. 开关磁阻电机设计与应用[M]. 北京: 机械工业出版社, 2000.
[28] Ding Wen, Yang Shuai, Hu Yanfang, et al. Design consideration and evaluation of a 12/8 high-torque modular-stator hybrid excitation switched reluctance machine for EV applications[J]. IEEE Transactions on Industrial Electronics, 2017, 64(12): 9221-9232.
Analysis of A 12/10-Pole Modular-Stator Hybrid-Excited Switched Reluctance Machine
Abstract In order to improve the output torque and power density and decrease the torque ripple of conventional switched reluctance machines (CSRMs), a novel three-phase 12/10-pole modular hybrid-excited SRM (MHSRM) is proposed in this paper. The stator of the motor consists of six U-shaped stator modules, and a permanent magnet is embedded in the slot between two poles. Each stator module forms an independent magnetic circuit, which improves the fault tolerance of the motor. At the same time, due to the addition of permanent magnets, it has a larger output torque and power density. This paper introduces the machine topology, operating principle and mathematical model of MHSRM. In order to verify the good performance of the motor, two-dimensional finite element analysis (FEA) is used to analyze the static electromagnetic field and magnetic characteristics of a MHSRM, a CSRM and a non-permanent magnet segmented-stator SRM with the same size. The influence of permanent magnet on the electromagnetic torque of MHSRM is also analyzed. At last, one MHSRM and one CSRM prototypes of the same size are manufactured, and the static electromagnetic and dynamic performance of two motors are tested. The performance is also compared with the 6/5-pole MHSRM. The experimental results verify the correctness of FEA results, and prove that MHSRM has better electromagnetic performance.
keywords:Hybrid-excited switched reluctance machine, modular-stator, permanent magnets, magnetic characteristic
DOI: 10.19595/j.cnki.1000-6753.tces.201313
中图分类号:TM351
丁 文 男,1981年生,副教授,博士生导师,研究方向为电机系统及其控制、无线电能传输。E-mail: wending@xjtu.edu.cn(通信作者)
李 可 男,1994年生,博士,讲师,研究方向为无线电能传输、电机系统控制。E-mail: like19@stu.xjtu.edu.cn
收稿日期 2020-09-29
改稿日期 2020-11-15
国家自然科学基金资助项目(51777161, 52077164)。
(编辑 崔文静)