 为一随机过程,E为其状态空间,若对任意的
为一随机过程,E为其状态空间,若对任意的 ,任意的
,任意的 ,随机变量
,随机变量 在已知变量
在已知变量 下的条件概率只与
下的条件概率只与 有关,而与
有关,而与
 无关,则认为该随机过程具有马尔科夫性,进一步可描述为
无关,则认为该随机过程具有马尔科夫性,进一步可描述为摘要 针对电动汽车(EV)聚合建模忽略单体差异以及EV辅助电网调频难以兼顾经济性与稳定性等问题,该文首先,考虑电池容量差异,基于马尔科夫链理论提出了EV动态演化过程转移概率计算方法,推导了关于荷电状态的转移概率分布函数,构建了EV聚合模型,并建立了EV参与的两区域互联系统联合调频控制模型;然后,提出了基于稳定经济模型预测控制的双模态集群EV辅助电网调频控制策略,模态1通过经济模型预测控制降低调节成本,模态2利用辅助控制器确保系统稳定性;最后,通过仿真算例表明,聚合模型具有较高精度,控制策略能够优化协调各资源出力,在维持系统频率稳定的基础上,改善了频率调节过程中系统的经济性。
关键词:电动汽车 转移概率 聚合模型 负荷频率控制 稳定经济模型预测控制
作为缓解能源和环境问题的新思路,电动汽车(Electric Vehicles, EV)移动储能技术受到了广泛关注。截至2020年底,我国已建成世界上充电设施最多、辐射面积最广、服务车辆最全的充电设施体系。预计至2030年,我国EV总容量将到达57亿kW·h[1]。以火电机组为主的传统调频手段难以满足新能源电力系统的调频需求。借助车电互联技术,充分利用EV电池的储能和快速响应特性,合理调控集群电动汽车(Aggregate Electric Vehicles, AEVs)充放电行为,已成为缓解电网调频压力的新途径[2]。EV分布广、数量多、单台车功率小,以聚合的形式更易参与电网调控。不过大规模EV的无序集聚,其充电负荷反而会加大峰谷差、降低电能质量,甚至对系统安全稳定运行造成负面影响[3-4]。因此,精确的聚合模型以及有效的联合调频策略是AEVs参与电网调频的两大关键技术[5]。
针对AEVs的聚合建模问题,文献[6]设计了基于对流方程的双线性聚合模型,并验证了聚合模型在新能源消纳和频率调节等方面的可行性;文献[7]借鉴温控负荷聚合建模思路,建立了AEVs的双线性可控充电模型,通过与直接聚合功率的对比验证了模型的有效性;文献[8]则综合考虑EV充电、放电、闲置三种状态,拓宽了AEVs的可调功率范围,同时利用Lax-Wendroff的二阶离散方法得到了更为精确且易于控制的线性聚合模型。然而,上述模型皆以聚合同质单体为假设,忽略了个体之间的差异性,导致建模的准确度不高。而基于马尔科夫链的建模方法能够通过概率密度函数表征单体之间的差异,利用转移概率构建聚合模型,如文献[9]阐述了温控负荷的马尔科夫性,提出了基于马尔科夫链计及热容异质性的温控负荷聚合建模方法。只是相较于温控负荷的温度变化周期,EV的荷电状态(State of Charge, SOC)变化周期要长得多,同样建模精度下对AEVs模型维数要求更高。故在考虑个体差异和保证建模精度等要求下,基于马尔科夫链的AEVs聚合建模还有待深入研究。
对于EV参与系统调频的研究已成为重要议题,文献[10]分析了EV荷源二重特性,建立了静态频率特性模型,证明了AEVs参与调频的可行性。文献[11]考虑SOC和出行需求建立了AEVs参与调频的充放电模式,但文中忽略了SOC的随机性对调频特性的影响。传统电力系统负荷频率控制以PID控制为主,但受控制参数数量多和系统状态约束动态变化等因素影响,PID控制性能偏弱[10]。模型预测控制(Model Predictive Control, MPC)综合考虑了输入、输出以及状态变量约束,可通过在线滚动实现对复杂多变量系统的优化控制。文献[12]利用MPC实现了AEVs对于调频指令的跟踪,文献[13]提出了基于MPC的风储联合调频策略,兼顾风储的实际约束,既平抑了风电波动又提高了系统调频性能;文献[14]提出了增量MPC的火光储协调优化频率控制方法,改善了混合发电系统的频率调节特性。不过上述文献均未考虑调频资源出力的经济优化分配,也未涉及AEVs与传统机组的联合调频,且普通MPC难以同时满足经济性与稳定性。为此,文献[15-16]提出了兼顾经济性和稳定性的双层MPC架构,上层用于各调频资源间的经济功率优化分配,下层实现频率动态控制,同时完成对上层经济最优点的跟踪。不过双层MPC架构忽略了下层控制过程的经济性,难以实现调控过程的全局最优。
综上所述,本文将基于马尔科夫链理论提出EV动态演化过程转移概率计算方法,推导EV关于SOC的转移概率分布函数,构建AEVs动态负荷聚合模型,达到模型低维数与高精度的双重要求;在此基础上,设计AEVs辅助传统机组的调频控制模型,并提出基于稳定经济模型预测控制(Lyapunov-based Economic Model Predictive Control, LEMPC)的双模态AEVs联合调频控制策略,借助两种模态,在更大范围内兼顾系统频率控制稳定性与调控经济性。通过算例仿真表明,构建的聚合模型准确度高,基于LEMPC的联合调频策略在保证系统频率稳定的基础上进一步提高了调频过程中的经济性,由此验证了所提策略的有效性。
设为一随机过程,E为其状态空间,若对任意的,任意的,随机变量在已知变量下的条件概率只与有关,而与无关,则认为该随机过程具有马尔科夫性,进一步可描述为

满足如上性质的随机过程称为马尔科夫过程,具有离散参数和离散状态空间的马尔科夫过程称为为马尔科夫链。马尔科夫链是一种描述随机转移过程的模型,从当前状态按一定的概率转移到下一状态,且未来状态仅与当前状态有关,而与历史状态无关。
EV充电是指电池从低电量状态向高电量状态转移的动态变化过程。一般采用SOC来表示电池的剩余电量,若将其记为状态S,其离散时间下的递推公式可表示为
 (2)
(2)
式中,S(k+1)和S(k)分别为第k+1时刻和第k时刻的SOC;Pch(k)为k时刻的充电功率;ηch为充电效率;CP为电池的实际容量;∆t为离散时间间隔。
根据式(2),电池SOC可看作一个离散的随机过程,且满足如下性质:S(k+1)的概率分布与EV的历史状态无关,仅取决于EV在k时刻的状态,即符合马尔科夫链。因此,本文将EV的SOC离散化为数个状态空间,通过马尔科夫链表示各状态区间内负荷的动态转移过程。状态区间i内的负荷在各区间之间的动态转移过程如图1所示,其中,Si表示EV充电过程中某SOC区间;实线表示下个时刻状态区间Si内负荷的动态转移路径;Pi,j表示从状态区间i转为状态区间j的转移概率,可用条件概率表示为
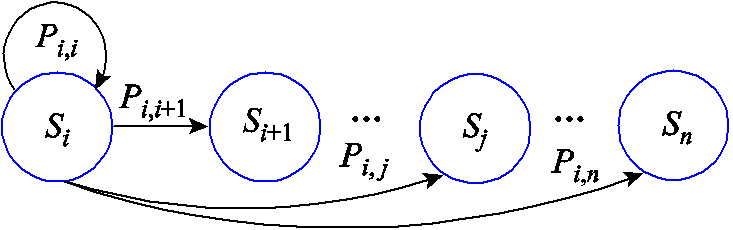
图1 EV负荷转移过程示意图
Fig.1 Schematic diagram of EV load transfer process
 (3)
(3)
为快速有效地抑制频率波动,本文提出了基于LEMPC的AEVs辅助传统机组联合调频控制策略,如图2所示。
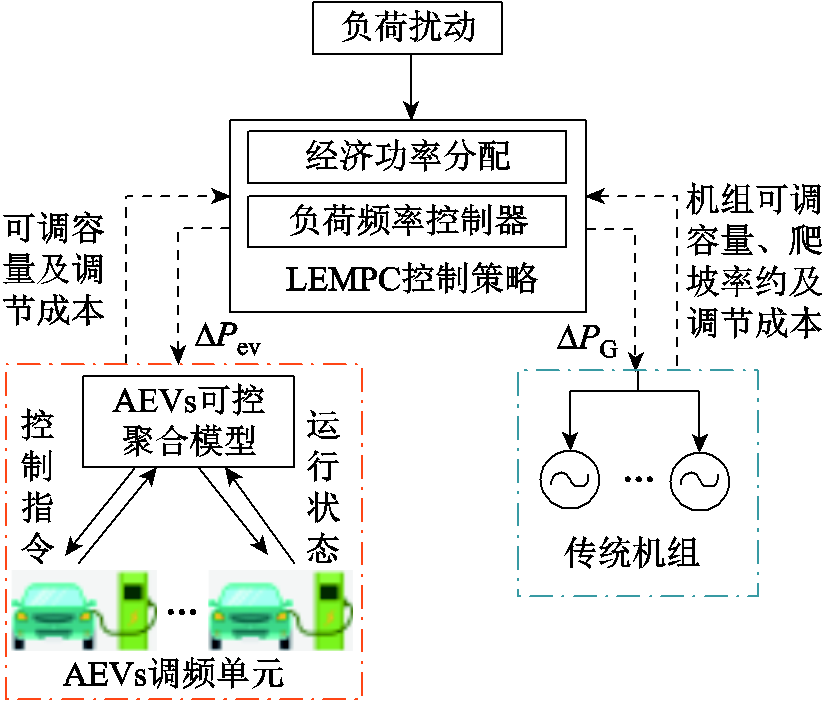
图2 基于LEMPC的设计思路
Fig.2 Design idea based on LEMPC
首先,将大规模可调度EV聚合建模形成一个便于电网调度的AEVs调频单元;接着,LEMPC控制策略根据EV调频单元以及各传统机组的出力约束和调节成本进行经济功率分配,确定各调频资源的稳态功率点;然后,负荷频率控制器通过双模态运行策略,在兼顾经济性与稳定性的前提下,实时调整各资源的功率指令,使各资源不断跟随稳定设定点;最后,各调频资源响应LEMPC控制器发出的功率指令,调整自身出力,完成调频。
LEMPC继承了EMPC优化过程经济性的优点,同时在控制过程中采用双模态运行策略,不仅考虑了系统的稳定性,还进一步扩大了优化自由度[17],故可在保证系统频率稳定的前提下,进一步提升AEVs参与下负荷频率调节系统的经济性。
2.1.1 充电过程转移概率计算方法
当前市面上EV品牌和电池厂商不计其数,不同的电池所对应的充电模式也不尽相同,主要包括慢速充电、常规充电和快速充电等模式,充电功率从几kW到几十kW不等。充电模式的不同,提升了AEVs聚合建模难度。因此,在EV参与聚合前根据充电模式进行分组,将充电功率、电池容量等特性参数相近的EV群体作为一个小聚合体进行建模,进而融合多个小群体的聚合模型得到整个大群体的拓展AEVs聚合模型。为此,在对EV进行聚合建模前,需要先确定可参与辅助调频的车辆。本研究对某时刻入网EV的信息进行收集,获取入网时刻、预计离网时刻、入网SOC、预计离网SOC、充电模式等参数,然后根据所收集的参数,对该时刻下EV是否具备辅助调频能力进行判断,符合条件的车辆将会被选取,不满足条件者进行强制充电直至离网。
具体而言,对于符合条件的车辆,首先根据EV电池容量进行一次分组,在此基础上根据充电功率进行二次分组,最后将二次分组后的车辆用于后续聚合模型的建立。从现场实施角度看,我国市场上各类型EV电池容量大都位于30~60kW·h之间,故依据电池容量的一次分组可将EV分为三类,即[30,40]kW·h、[40,50]kW·h和[50,60]kW·h。此外,EV主要有7kW慢速充电、15kW常规充电和40kW快速充电三种有代表性的充电模式,国标GB/T 20234.1—2015也要求EV充电设备进行统一配置以兼容不同品牌EV。为此,依据充电功率的二次分配可根据上述三种充电模式进一步实现电动汽车群体细分。由此,经过二次分组后的电动汽车具有相似的容量参数和相同的功率参数,建模时,对于某一群体的EV容量可取该类别的平均值作为标准量。
下面将针对二次分组后某一EV群体的聚合过程展开探讨。考虑到EV充电安全性及电池寿命等因素,设置了SOC上、下限 、
、 ,并将EV充电过程SOC离散为N个状态区间,用各状态间的动态转移概率表征AEVs的负荷动态转移过程,相邻SOC区间的概率转移过程如图3所示。
,并将EV充电过程SOC离散为N个状态区间,用各状态间的动态转移概率表征AEVs的负荷动态转移过程,相邻SOC区间的概率转移过程如图3所示。
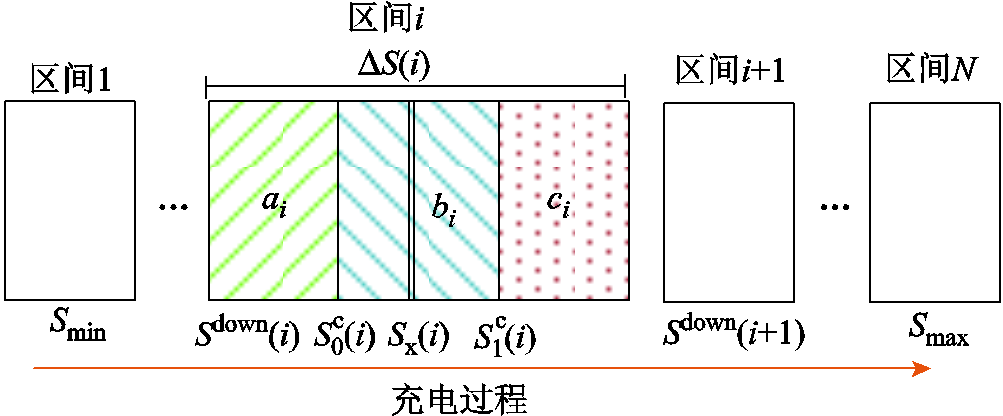
图3 相邻区间转移过程示意图
Fig.3 Diagram of transfer process between adjacent intervals
图3中, 和
和 分别表示第i+1个和第i个区间的SOC下边界值,区间i的SOC变化量
分别表示第i+1个和第i个区间的SOC下边界值,区间i的SOC变化量 可表示为:
可表示为: 。若k时刻第i区间SOC为
。若k时刻第i区间SOC为 ,k+1时刻SOC大于或等于,则认为负荷实现了相邻状态的转移,并且越接近于,转移概率越大,越接近于转移概率越小。用
,k+1时刻SOC大于或等于,则认为负荷实现了相邻状态的转移,并且越接近于,转移概率越大,越接近于转移概率越小。用 和
和 分别表示第i个区间的0概率和1概率的SOC临界值。由此,第i个区间可被分为3个小的概率区间,分别为ai、bi和ci。区间
分别表示第i个区间的0概率和1概率的SOC临界值。由此,第i个区间可被分为3个小的概率区间,分别为ai、bi和ci。区间 ,该区间内转移概率为0,SOC变化量为
,该区间内转移概率为0,SOC变化量为 ,定义
,定义 ;区间
;区间 ,该段内随SOC的增大转移概率从0递增至1,定义
,该段内随SOC的增大转移概率从0递增至1,定义 ;区间
;区间 ,该段内转移概率为1;定义
,该段内转移概率为1;定义
 ,定义
,定义 为区间bi的平均概率,其含义为从至的转移概率的平均值。结合式(1),利用概率论知识,由区间bi内电池容量的概率密度函数
为区间bi的平均概率,其含义为从至的转移概率的平均值。结合式(1),利用概率论知识,由区间bi内电池容量的概率密度函数 表达关于SOC区间转移概率密度函数
表达关于SOC区间转移概率密度函数 ,即
,即
 (4)
(4)
对式(4)积分可得区间bi内的转移概率分布函数 为
为
 (5)
(5)
表示区间bi内S(k)经过一个时间步长 后,可转移到第i+1区间的概率值。借助积分中值定理,进一步推导可得平均概率表达式为
后,可转移到第i+1区间的概率值。借助积分中值定理,进一步推导可得平均概率表达式为
 (6)
(6)
由式(4)~式(6)可知,已知,则可求,而为的二重定积分,故必为定值。
由于为定值,则从区间i向区间i+1转移的总概率 为
为
 (7)
(7)
经过简单推导,式(7)中 和
和 可表示为
可表示为
 (8)
(8)
 (9)
(9)
联立式(7)~式(9),可得相邻区间i和i+1的转移概率为
 (10)
(10)
式中, 、
、 分别为电池容量的最大值、最小值。由式(10)可知,当SOC被N等分时,任意两个相邻状态间的转移概率皆可由定值表示。
分别为电池容量的最大值、最小值。由式(10)可知,当SOC被N等分时,任意两个相邻状态间的转移概率皆可由定值表示。
2.1.2 充电过程聚合模型
由于聚合模型面向调频控制,时间步长通常很小,且状态区间数量N不宜过大,因此可假设某一个时间步长内,EV负荷只有两种转移路径[18],即保留于原状态区间或进入下一个相邻状态区间。充电负荷动态转移示意如图4所示,阴影部分表示该区间的负荷量。可见,除了上述两种转移路径外,干扰因素 也会影响区间负荷量。本研究中干扰因素包括三个:新增的充电负荷、离开充电桩的负荷、不再具备可调度能力的负荷。
也会影响区间负荷量。本研究中干扰因素包括三个:新增的充电负荷、离开充电桩的负荷、不再具备可调度能力的负荷。
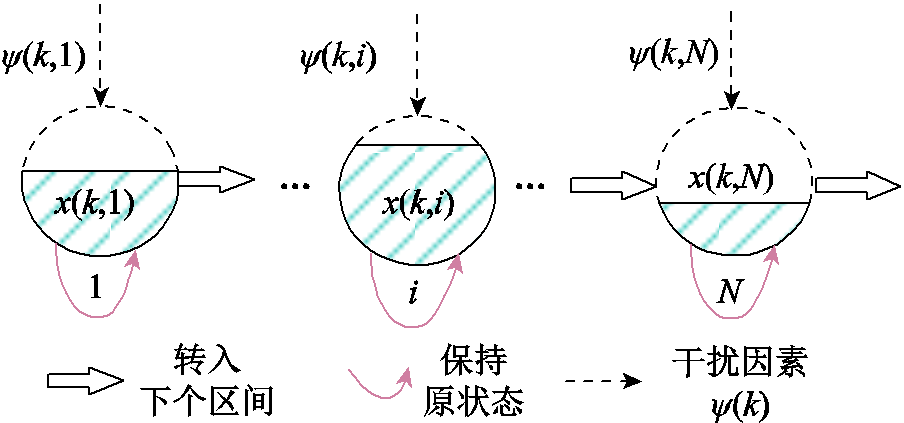
图4 充电负荷动态演化示意图
Fig.4 Dynamic evolution diagram of charging load
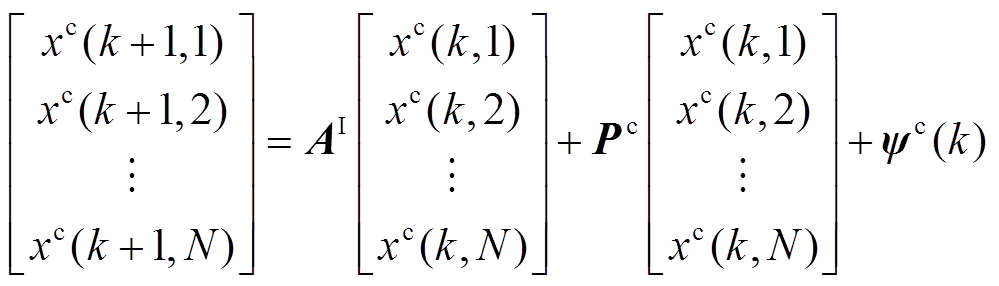
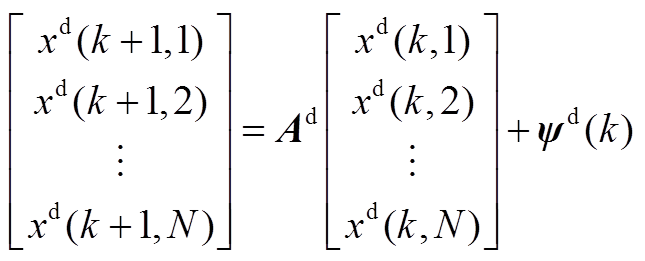
基于上述分析,充电负荷的动态转移过程可由状态空间方程(11)描述。
 (11)
(11)
式中, 和
和 分别为k时刻和k+1时刻第i个SOC区间内的负荷量;
分别为k时刻和k+1时刻第i个SOC区间内的负荷量; 为各区间充电负荷的干扰因素,
为各区间充电负荷的干扰因素, 。当未对AEVs施加任何充电功率时,各SOC区间的负荷量不发生任何变化,该过程为闲置状态,可由闲置转移矩阵
。当未对AEVs施加任何充电功率时,各SOC区间的负荷量不发生任何变化,该过程为闲置状态,可由闲置转移矩阵 进行描述,为N维单位阵。当对AEVs施加充电功率时,各SOC区间的负荷会发生强制转移,该过程可由充电强制转移矩阵
进行描述,为N维单位阵。当对AEVs施加充电功率时,各SOC区间的负荷会发生强制转移,该过程可由充电强制转移矩阵 来进行描述,即
来进行描述,即
 (12)
(12)
式中, 为区间i向区间j转移的概率,也是负荷转移的比重,可由式(10)求得,其数值为正表示负荷转入区间j,数值为负则表示负荷从区间i转出。特殊地,
为区间i向区间j转移的概率,也是负荷转移的比重,可由式(10)求得,其数值为正表示负荷转入区间j,数值为负则表示负荷从区间i转出。特殊地, 表示充电完成负荷占区间N总负荷的比重。AEVs充电过程中,状态转移矩阵
表示充电完成负荷占区间N总负荷的比重。AEVs充电过程中,状态转移矩阵 。由此完成了AEVs的充电聚合建模。
。由此完成了AEVs的充电聚合建模。
2.1.3 AEVs全状态可控聚合模型
AEVs闲置状态和放电状态下的聚合建模过程与上述充电过程类似,不再赘述,详见附录。
最终,基于上述三种状态下AEVs聚合模型,可整理出AEVs全状态聚合模型为
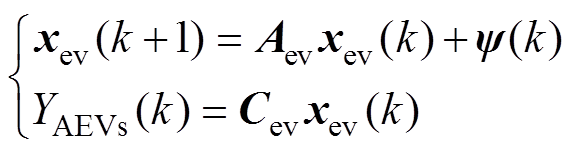 (13)
(13)
式中, 为EV在三种运行状态下的复合状态变量,共计3N维,
为EV在三种运行状态下的复合状态变量,共计3N维, ,
, 为闲置状态下的负荷量矩阵,
为闲置状态下的负荷量矩阵, 为放电状态下的负荷量矩阵;
为放电状态下的负荷量矩阵; ,
, 为闲置状态下的干扰因素,
为闲置状态下的干扰因素, 为放电负荷的干扰因素;
为放电负荷的干扰因素; 为聚合输出功率;
为聚合输出功率; 为状态转移矩阵;
为状态转移矩阵; 为系统输出矩阵。
为系统输出矩阵。
 (14)
(14)
 (15)
(15)
式中, 为放电状态转移矩阵。
为放电状态转移矩阵。
假设EV被分为n个群体,将前文所述看作是第h个群体的建模过程,则式(13)改写为
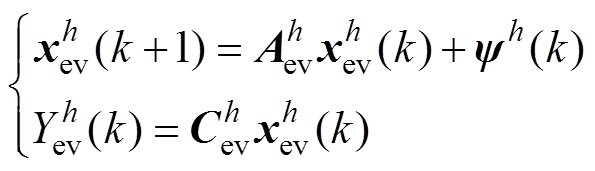 (16)
(16)
式中, 、
、 分别为第h个EV集群的k+1、k时刻的复合状态变量;
分别为第h个EV集群的k+1、k时刻的复合状态变量; 为第h个集群的状态转移矩阵;
为第h个集群的状态转移矩阵; 为第h个集群k时刻所受扰动;
为第h个集群k时刻所受扰动; 为第h个集群的k时刻聚合输出功率;
为第h个集群的k时刻聚合输出功率; 为第h个集群的系统输出矩阵。
为第h个集群的系统输出矩阵。
整合n个群体模型,可得到EV整体拓展模型为
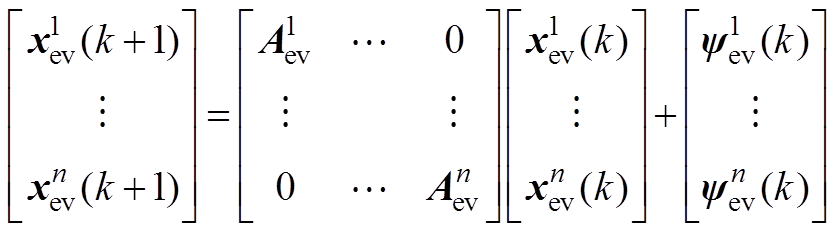 (17)
(17)
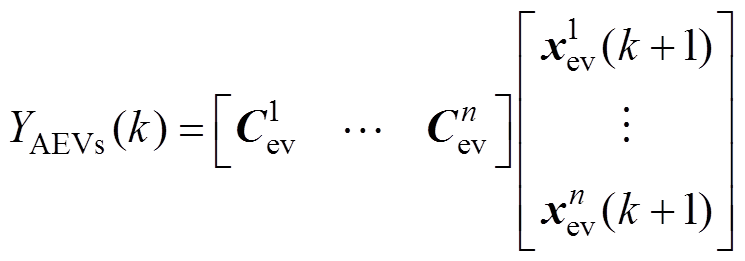 (18)
(18)
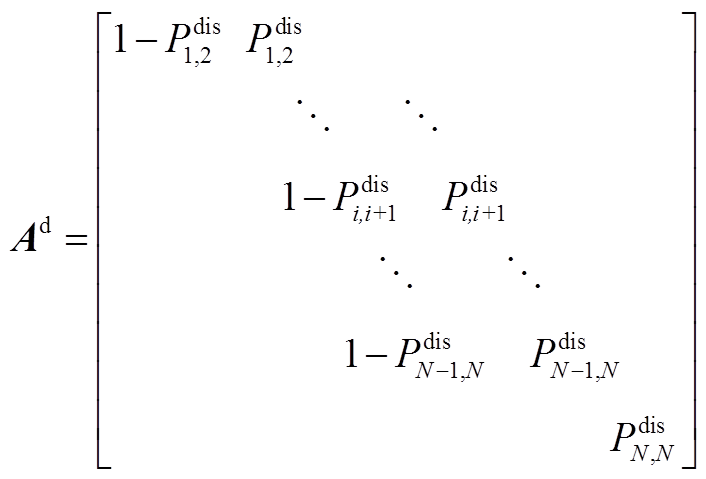
2.2.1 两区域调频控制结构
本节以典型的两区域互联系统为研究对象,建立AEVs辅助传统机组的调频控制架构,如附图1所示。两区域中各设置1台火电调频机组,AEVs调频单元配置于区域1中。附图1中, 、
、 分别表示频率偏差和负荷扰动;
分别表示频率偏差和负荷扰动; 、
、 分别表示传统机组和AEVs的控制指令;
分别表示传统机组和AEVs的控制指令; 、
、 、
、 和
和 分别表示调速器阀门偏差量、火电机组出力偏差量、AEVs出力偏差量和联络线功率偏差;
分别表示调速器阀门偏差量、火电机组出力偏差量、AEVs出力偏差量和联络线功率偏差; 则表示区域j的区域控制偏差。根据各区域调频资源的实际可调容量,将AGC的控制模式分为两种:①当各区域内可调容量充足时,采用联络线功率频率偏差控制(Tie-line load frequency Bias Control, TBC)模式保证区域控制偏差ACE为0,各区域就地平衡功率波动;②各区域内资源可调容量不足时,为保证系统频率稳定,需协调两区域进行能量交互。
则表示区域j的区域控制偏差。根据各区域调频资源的实际可调容量,将AGC的控制模式分为两种:①当各区域内可调容量充足时,采用联络线功率频率偏差控制(Tie-line load frequency Bias Control, TBC)模式保证区域控制偏差ACE为0,各区域就地平衡功率波动;②各区域内资源可调容量不足时,为保证系统频率稳定,需协调两区域进行能量交互。
2.2.2 火电机组模型
根据附图1传递函数框图,火电机组包括调速器模型和汽轮机模型。以 和
和 分别表示调速器j时间常数和机组j的调差系数,则调速器j动态响应模型可表示为
分别表示调速器j时间常数和机组j的调差系数,则调速器j动态响应模型可表示为
 (19)
(19)
以 表示汽轮机时间常数,则汽轮机j的动态响应模型为
表示汽轮机时间常数,则汽轮机j的动态响应模型为
 (20)
(20)
2.2.3 负荷频率模型
AEVs参与下各区域负荷频率偏差动态特性为
 (21)
(21)
 (22)
(22)
式中, 、
、 和
和 、
、 分别为区域1和区域2的负荷阻尼系数和系统惯性常数。
分别为区域1和区域2的负荷阻尼系数和系统惯性常数。
2.2.4 联络线功率及区域控制偏差模型
以 和
和 分别表示联络线同步时间常数和系统频率偏差系数,则联络线功率和ACE可写为
分别表示联络线同步时间常数和系统频率偏差系数,则联络线功率和ACE可写为
 (23)
(23)
 (24)
(24)
2.2.5 AEVs调频单元模型
AEVs调频单元结构如图5所示,其中LEMPC控制器输出EV控制指令,即AEVs的功率跟踪信号 。
。
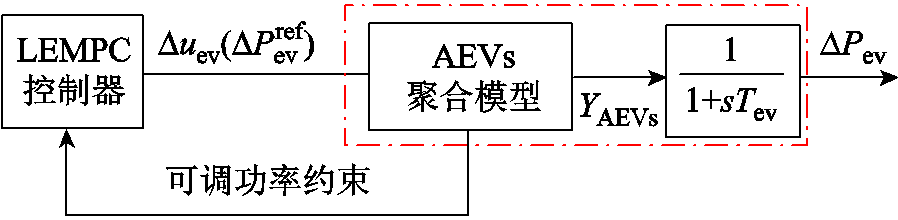
图5 AEVs调频单元结构
Fig.5 AEVs frequency regulation unit
AEVs接收到调频指令后,经底层控制器[8]调节聚合模型输出功率YAEVs跟踪。与此同时,聚合模型更新各状态变量,进而计算下个时刻的AEVs可调功率范围,并作为约束条件反馈给LEMPC控制器,避免了每个时刻采集EV运行状态。为简便分析,忽略调节指令的通信延时,并用一阶惯性环节描述EV电池动态响应特征[19],则调频过程中,可将AEVs调频单元简化为
 (25)
(25)
式中, 为EV的响应时间常数。
为EV的响应时间常数。
2.2.6 两区域调频控制模型
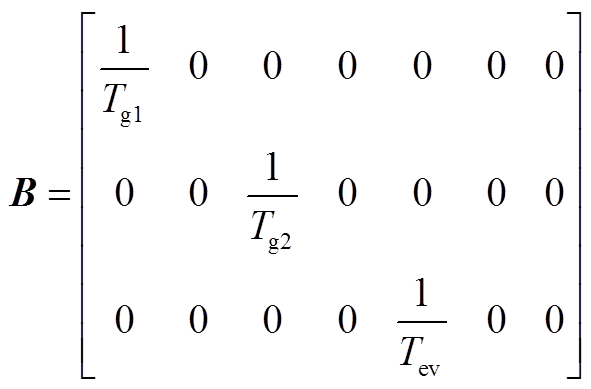
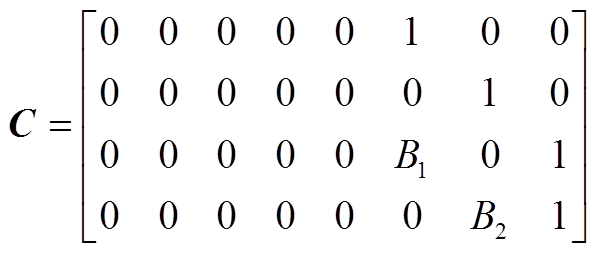
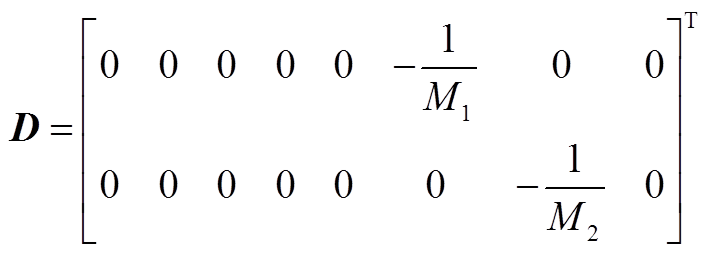
综上所述,AEVs参与下两区域调频控制模型可表示为
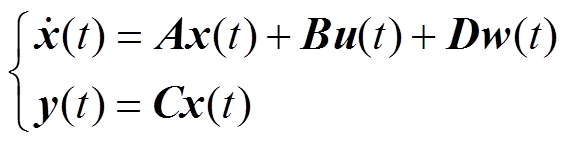 (26)
(26)
式中,x为状态变量,
 ;u为系统控制变量,
;u为系统控制变量,
 ;w为负荷扰动向量,
;w为负荷扰动向量, ;y为系统输出向量,
;y为系统输出向量, ;A、B、C和D分别为状态矩阵、控制矩阵、输出矩阵和扰动矩阵,其详细表达式请见附录。
;A、B、C和D分别为状态矩阵、控制矩阵、输出矩阵和扰动矩阵,其详细表达式请见附录。
为平衡区域电网中的负荷扰动,提高运行经济性,需进行功率经济分配,合理协调各调频资源的出力,其结果将作为LEMPC控制器的稳态最优设定值。本研究处理思路为:综合考虑各调频资源的约束条件,以最小化总调节成本为目标优化分配调频功率。
对于火电机组,其发电成本主要来源于煤耗量和CO2排放量,成本函数 可由二次函数描述为
可由二次函数描述为
 (27)
(27)
式中, ,即调频机组i的初始功率
,即调频机组i的初始功率 与稳态功率偏差之和;
与稳态功率偏差之和; 、
、 、
、 分别为机组煤耗特性参数;
分别为机组煤耗特性参数; 和
和 分别为燃料成本和CO2排放成本。
分别为燃料成本和CO2排放成本。
AEVs作为可调负荷,其调节成本主要来源于电池损耗[14]以及与电网互动的电价成本[20],也将AEVs的调节成本描述为二次函数,即
 (28)
(28)
式中, 和
和 分别为电池损耗与电价成本系数。
分别为电池损耗与电价成本系数。
区域联络线功率调节成本则可直接表示为[16]
 (29)
(29)
式中, 为联络线功率调节成本系数。
为联络线功率调节成本系数。
综上所述,稳态经济最优点求解模型可表示为
 (30)
(30)
 (31)
(31)
式中, 、
、 、
、 、
、 、
、 、
、 分别为机组j、AEVs以及联络线功率的可调功率上、下限。等式约束保证功率平衡。
分别为机组j、AEVs以及联络线功率的可调功率上、下限。等式约束保证功率平衡。
特殊地,考虑到EV的充电需求,当传统机组容量充足时,AEVs的功率稳态设定点应为0,即频率调节完成后,AEVs应恢复充电状态。
LEMPC控制器应根据两区域内负荷扰动、频率偏差、ACE等信息统筹集中调节两区域调频资源出力,以实现频率的快速经济调节。基于LEMPC理论,设计了模型预测、综合性能指标优化、辅助控制器设计和双模态运行策略等四个实现步骤。
3.2.1 模型预测
以 为采样周期,将模型式(26)转换为离散状态空间表达式,即
为采样周期,将模型式(26)转换为离散状态空间表达式,即
 (32)
(32)
式中, ,
, ,
, 。设MPC的预测时域为p,控制时域为m,则k时刻下模型(29)的预测状态变量值为
。设MPC的预测时域为p,控制时域为m,则k时刻下模型(29)的预测状态变量值为
 (33)
(33)
式中, 为k时刻模型的状态预测;
为k时刻模型的状态预测; 为模型的预测控制序列;
为模型的预测控制序列; 、
、 、
、 为预测矩阵,表达式为
为预测矩阵,表达式为
 (34)
(34)
3.2.2 综合性能指标
调频过程中考虑四个性能指标:频率偏差l1(k)、火电成本l2(k)、AEVs成本 和联络线功率偏差成本
和联络线功率偏差成本 ,由此构建综合性能函数为
,由此构建综合性能函数为
 (35)
(35)
 (36)
(36)
式中, 、
、 、
、 和
和 为权重系数。
为权重系数。
3.2.3 辅助控制器设置
为保证系统的稳定性,使得各调频资源最终收敛到稳态经济最优设定点,拟设计辅助控制器并考虑综合约束的稳定域。为确保辅助控制器能跟踪稳定经济最优设定点,需将设定点转移至零点,并定义正定对称矩阵P、Q以及Lyapunov函数 。结合Schur补引理[17],系统的预测控制优化问题可由线性矩阵不等式(Linear Matrix Inequalities, LMI)描述为[21]
。结合Schur补引理[17],系统的预测控制优化问题可由线性矩阵不等式(Linear Matrix Inequalities, LMI)描述为[21]
 (37)
(37)
 (38)
(38)
 (39)
(39)
 (40)
(40)
式中,F为待优化函数;P、Q、θ为待求变量;θ为MPC传统性能指标;Pt为稳态经济最优点;yp为预测模型的输出序列;rx、ru分别为MPC传统性能指标θ中状态量和控制量的权重矩阵;H为模型(32)中控制量的幅值约束矩阵,此处主要考虑AEVs的控制量约束(应满足AEVs聚合模型计算得到的可调功率范围约束); 表示矩阵的对称性。传统机组的控制量约束体现在阀门开度与爬坡率约束中,下面给出传统机组约束处理方法。
表示矩阵的对称性。传统机组的控制量约束体现在阀门开度与爬坡率约束中,下面给出传统机组约束处理方法。
火电机组阀门变化量约束可描述为 ,
, 、
、 表示阀门开度上下限,取决于k时刻机组运行状态。定义向量
表示阀门开度上下限,取决于k时刻机组运行状态。定义向量 ,使得
,使得 ,则由Schur补引理可将机组j的阀门幅值约束转换为如下LMI。
,则由Schur补引理可将机组j的阀门幅值约束转换为如下LMI。
 (41)
(41)
火电机组输出功率的爬坡率约束可表示为 ,
, 、
、 分别表示k时刻机组j的爬坡上、下限约束。为便于控制器设计,可将约束转换为
分别表示k时刻机组j的爬坡上、下限约束。为便于控制器设计,可将约束转换为
 (42)
(42)
式中, 、
、 分别为k时刻机组j的可调功率上、下限。
分别为k时刻机组j的可调功率上、下限。
基于式(39),定义向量 ,使得
,使得 ,则k时刻机组j的爬坡率约束可转换为如下LMI,即
,则k时刻机组j的爬坡率约束可转换为如下LMI,即
 (43)
(43)
同理,可将联络线功率的幅值约束转换为
 (44)
(44)
式中, 为联络线的最大容许功率;
为联络线的最大容许功率; 。
。
联立约束式(38)~式(44),求解LMI优化目标式(37),可得线性辅助控制器u和稳定域 为
为
 (45)
(45)
式中, 为线性反馈控制器;
为线性反馈控制器; 为n维向量空间;K为线性反馈矩阵。稳定域内状态变量及控制变量满足上述所有约束。
为n维向量空间;K为线性反馈矩阵。稳定域内状态变量及控制变量满足上述所有约束。
3.2.4 双模态运行策略
基于上述过程,k时刻调频控制模型的LEMPC双模态运行优化问题可描述为
 (46)
(46)
 (47)
(47)
 (48)
(49)
(50)
(48)
(49)
(50)
 (51)
(51)
 (53)
(53)
式中, 和
和 分别为当前时间和切换时间。目标函数为整个预测时域内综合性能指标
分别为当前时间和切换时间。目标函数为整个预测时域内综合性能指标 最小;式(47)表示系统状态变量预测值;式(48)~式(51)为系统优化问题应满足的综合约束条件。可见,上述控制器包括两个运行模态:当运行于模态1时,在稳定域Ωθ内优化综合性能指标,通过EMPC在线求解优化目标函数得到k时刻的控制变量;当系统运行于模态2时,通过线性反馈控制器,驱动系统状态达到稳态最优设定点,强制系统实现闭环稳定。此外,借助前文设计的辅助控制器,还能保证稳定域内的系统状态皆可满足综合约束条件式(48)~式(51),确保系统安全稳定运行。通过双模态的运行策略既改善了传统EMPC调频策略难以保证稳定性的问题,同时又兼顾了双层MPC策略所忽视的调节过程优化问题。
最小;式(47)表示系统状态变量预测值;式(48)~式(51)为系统优化问题应满足的综合约束条件。可见,上述控制器包括两个运行模态:当运行于模态1时,在稳定域Ωθ内优化综合性能指标,通过EMPC在线求解优化目标函数得到k时刻的控制变量;当系统运行于模态2时,通过线性反馈控制器,驱动系统状态达到稳态最优设定点,强制系统实现闭环稳定。此外,借助前文设计的辅助控制器,还能保证稳定域内的系统状态皆可满足综合约束条件式(48)~式(51),确保系统安全稳定运行。通过双模态的运行策略既改善了传统EMPC调频策略难以保证稳定性的问题,同时又兼顾了双层MPC策略所忽视的调节过程优化问题。
由此,绘制LEMPC调频策略流程如图6所示。
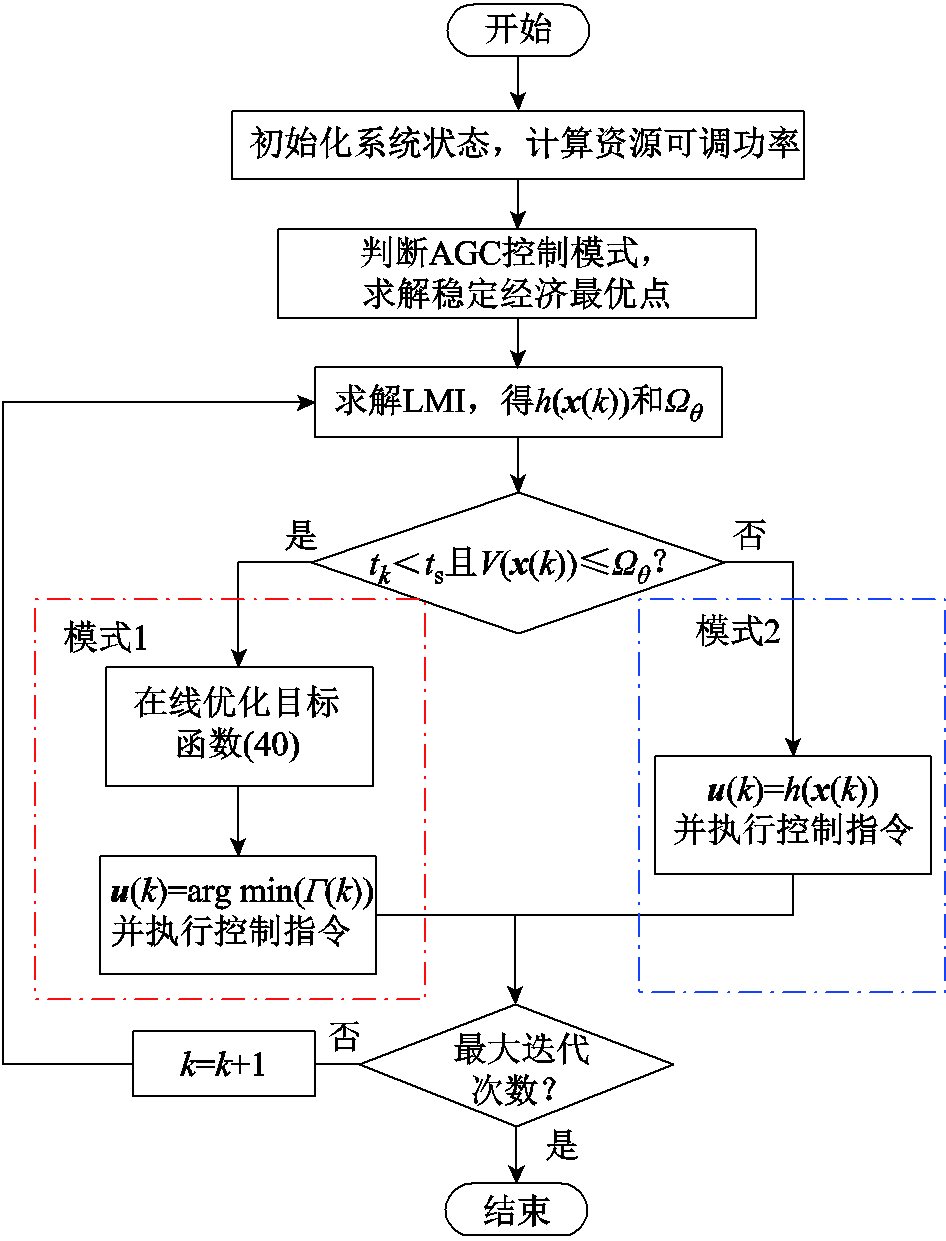
图6 基于LEMPC的调频控制策略流程图
Fig.6 Flow chart of frequency regulation control scenario based on LEMPC
包括以下主要步骤:
(1)初始化系统运行状态,计算各区域调频资源可调功率范围。
(2)根据各区域负荷扰动 和可调潜力判断AGC控制模式,确定处于何种情景,通过式(30)、式(31)求得稳定经济最优点。
和可调潜力判断AGC控制模式,确定处于何种情景,通过式(30)、式(31)求得稳定经济最优点。
(3)求解LMI优化问题式(37)~式(40),得线性辅助控制器以及相应的稳定域 。
。
(4)如果 且
且 ,则转向步骤(5);否则转向步骤(7)。
,则转向步骤(5);否则转向步骤(7)。
(5)控制器运行于模态1,以经济性指标为主,并在稳定域内优化目标函数式(46)。
(6)控制量经目标函数优化得到, ,转向步骤(8)。
,转向步骤(8)。
(7)控制器运行于模态2, ,将系统驱动至稳定最优设定点,保证频率稳定。
,将系统驱动至稳定最优设定点,保证频率稳定。
(8)执行控制指令 ,采样时刻
,采样时刻 ,返回步骤(3)。
,返回步骤(3)。
为体现所提基于LEMPC的双模态调频控制策略的优势,以附图1所示的AEVs参与典型两区域互联系统为例,在Matlab/Simulink平台进行仿真分析,并与双层MPC、PI控制结果进行对比。附表1和附表2给出了仿真所需的传统机组、EV、联络线模型参数及经济性参数[16],参数已转换为100MW基准下的标幺值。LEMPC控制器参数设置为:辅助控制器设计中传统性能指标权重系数 为8阶单位阵,
为8阶单位阵, ;控制器仿真步长选取0.1s;为充分优化系统的综合性能指标,在模态1中,预测步长
;控制器仿真步长选取0.1s;为充分优化系统的综合性能指标,在模态1中,预测步长 ;控制步长
;控制步长 ;控制切换时间选取15s。
;控制切换时间选取15s。
为验证所建AEVs聚合模型的准确性,选取由三种充电模式组成的电动车群体进行聚合仿真,并将它们的结果与AEVs直接聚合功率曲线进行对比。AEVs数量为2 500辆,一天24个时段的负荷流入量以及AEVs参数如图7所示。其中,AEVs的起始SOC为N(0.45,0.15);SOC上下限值分别为0.95和0.2;电池容量符合均匀分布;参与充电的起始荷电状态符合正态分布;SOC上下限、充/放电功率、充电效率等参数见表1。仿真步长选取4s,SOC区间数量选取20。
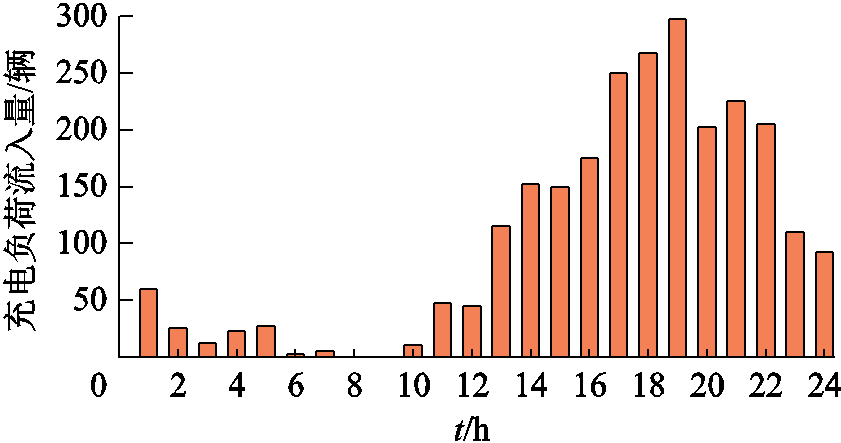
图7 某区域24h电动汽车流入量
Fig.7 Inflow of electric vehicles in a region in 24 hours
表1 某区域AEVs仿真参数
Tab.1 Simulation parameters of AEVs in a certain area

组别电池容量/(kW·h)充放电功率/kW充放电效率 一U(30,40)70.90 二U(50,60)140.95 三U(40,50)400.92
图8给出了两种方法的对比仿真结果。可见,本文所建基于转移概率的AEVs聚合模型与直接功率模型聚合功率基本保持了一致,能够较准确地描述AEVs充电负荷的动态变化过程,同时,对于不同电池容量和充电功率的EV组,聚合模型输出功率与蒙特卡洛模拟法都保持了一致。而且,为达到同样的模型精度,与文献[22]方法相比,本文提出的转移概率求取方法大大降低了模型维数。
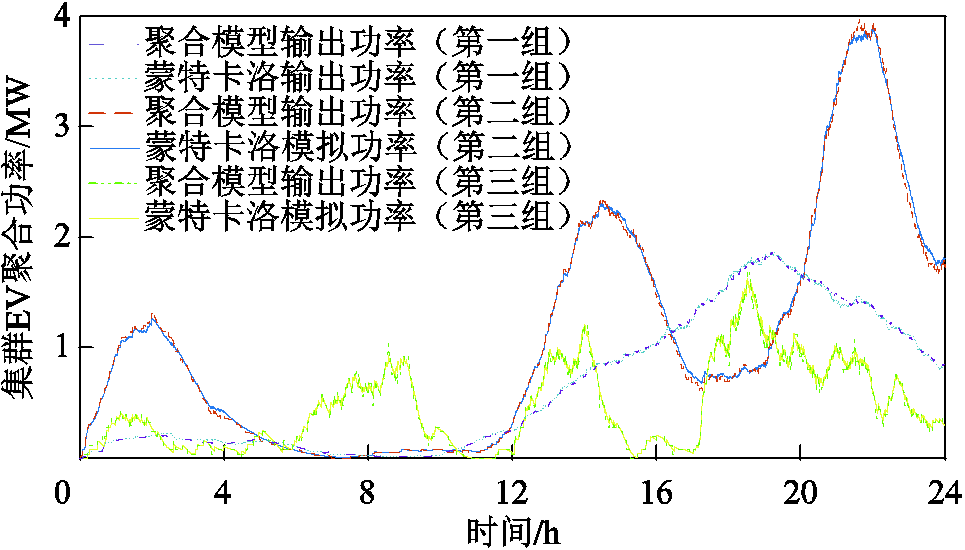
图8 聚合模型仿真功率曲线对比
Fig.8 Comparison of simulation power curves of aggregation models
进一步将三组EV统一进行蒙特卡洛模拟,与AEVs拓展聚合模型进行仿真对比。不同充电特性参数下基于拓展聚合模型的功率对比结果如图9所示。可见,通过分组聚合得到的AEVs拓展聚合模型能够准确描述不同充电特性EV负荷群体的动态演化过程。
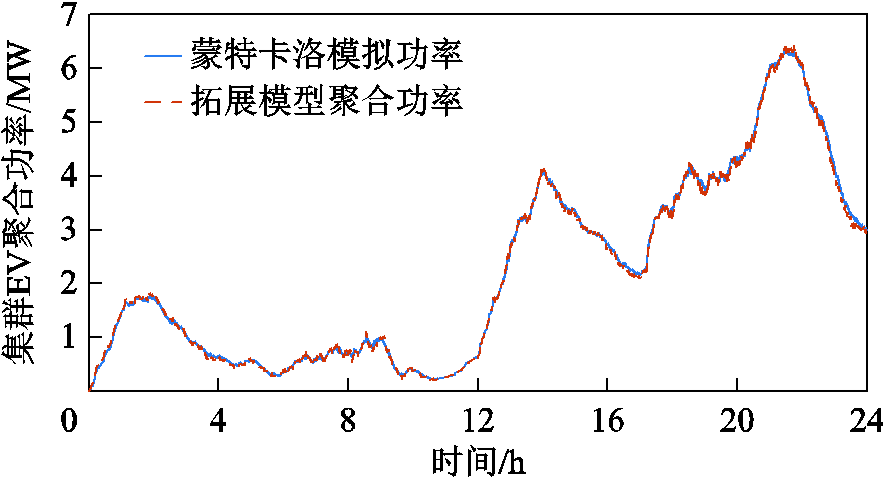
图9 拓展聚合模型输出功率仿真对比
Fig.9 Simulation comparison of output power of extended aggregation model
为更好地体现基于LEMPC调频控制策略的控制效果,同时更直观地反应调控细节,设置了三个扰动场景进行仿真分析。
场景1:设定传统机组阀门约束 、
、 为0.2(pu)、0.1(pu);爬坡率约束均为0.2pu/min;AEVs可调功率约束为0.1(pu);联络线输送能力上下限为±0.1(pu)。假设t=5s时,系统发生阶跃扰动
为0.2(pu)、0.1(pu);爬坡率约束均为0.2pu/min;AEVs可调功率约束为0.1(pu);联络线输送能力上下限为±0.1(pu)。假设t=5s时,系统发生阶跃扰动 ,
, ,按TBC协议两区域就地平衡功率波动,
,按TBC协议两区域就地平衡功率波动, 稳态点为0;且区域1传统机组调节容量充足,本着“传统为主、AEVs为辅”的理念,为保证调频结束后EV恢复充电状态,AEVs的稳态设定点
稳态点为0;且区域1传统机组调节容量充足,本着“传统为主、AEVs为辅”的理念,为保证调频结束后EV恢复充电状态,AEVs的稳态设定点 也为0。权重系数的选取分析过程请见附录,经过天牛须优化算法[23]最终选取权重系数
也为0。权重系数的选取分析过程请见附录,经过天牛须优化算法[23]最终选取权重系数 、
、 、
、 、
、 分别为1 007.30、8.68、1.24和9.87。
分别为1 007.30、8.68、1.24和9.87。
EMPC中优化问题采用Matlab中Gurobi工具箱对控制问题进行求解。不同控制策略下系统动态响应曲线如图10所示。不同性能指标下两种控制策略的对比结果见表2。
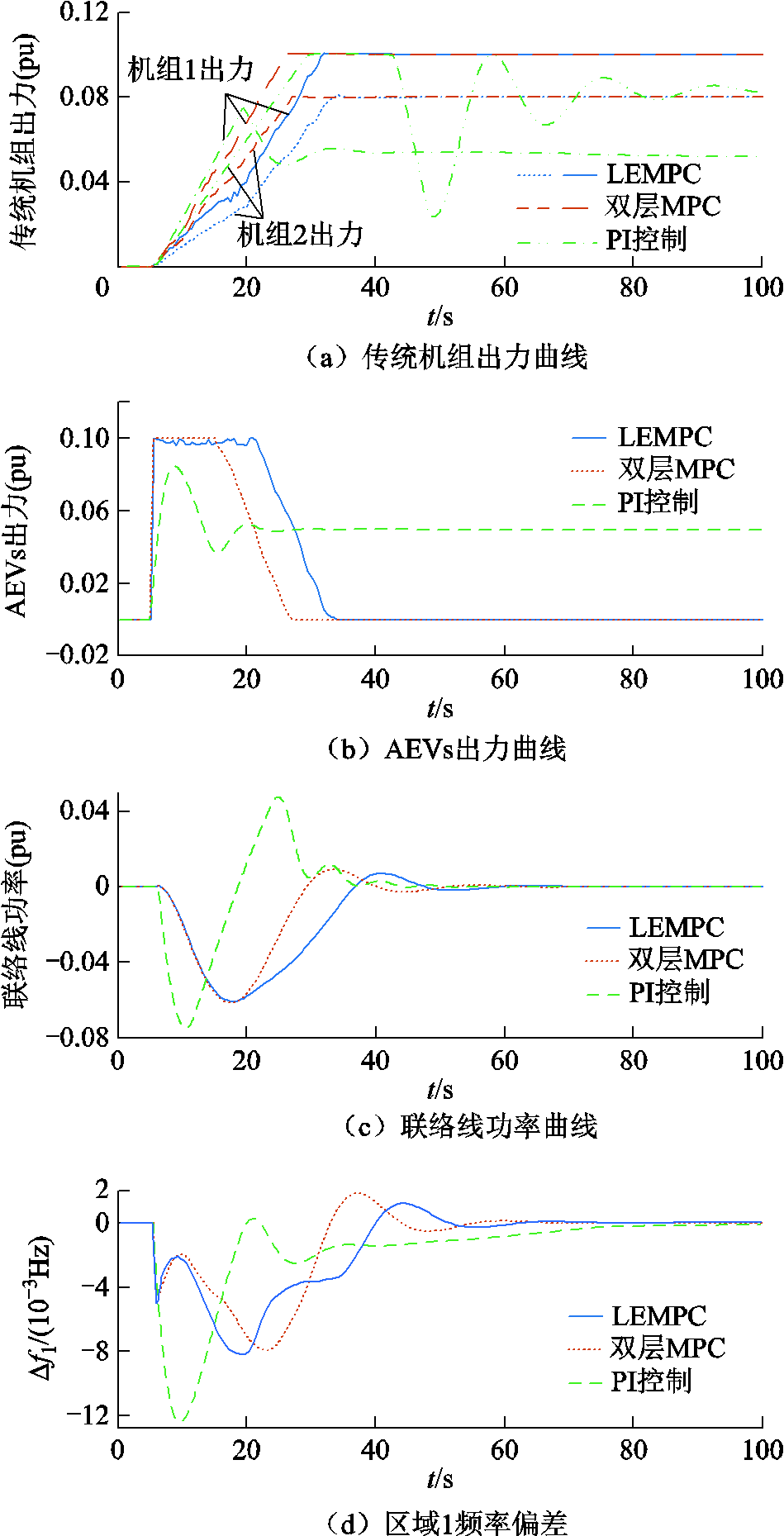
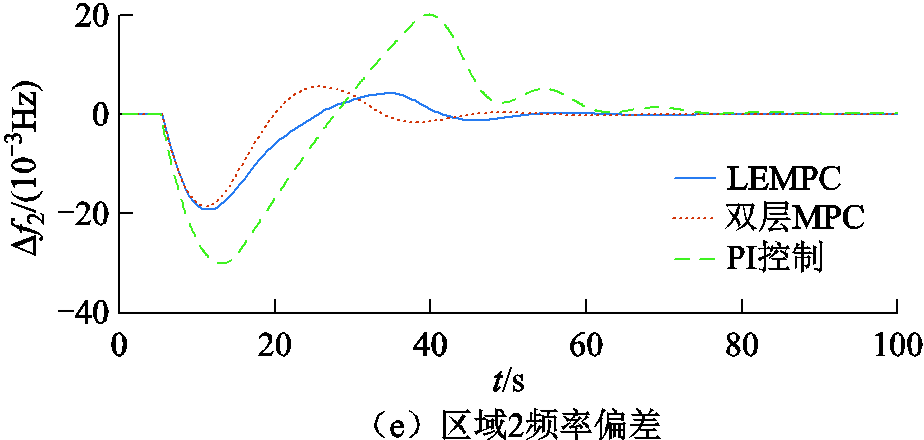
图10 不同控制策略下系统动态响应过程(场景1)
Fig.10 System dynamic response process under different control strategies (scene1)
表2 控制策略对比结果(场景1)
Tab.2 Control scenario comparison results (scene1)
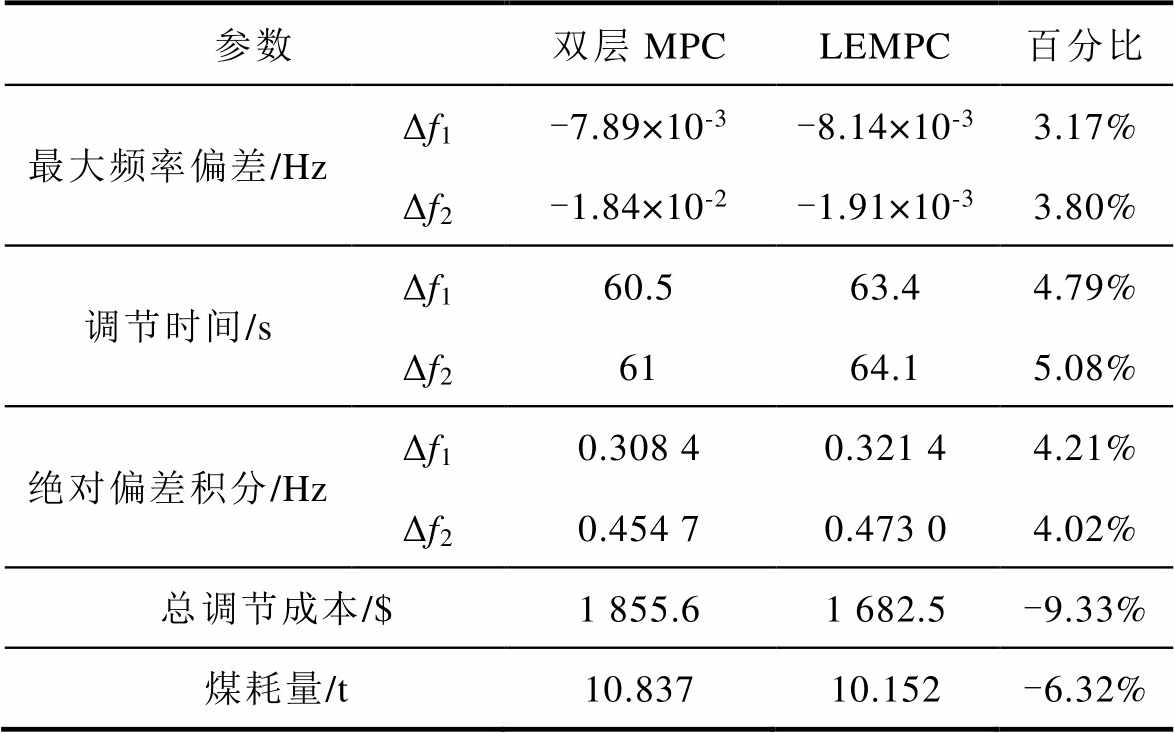
参数双层MPCLEMPC百分比 最大频率偏差/HzΔf1-7.89×10-3-8.14×10-33.17% Δf2-1.84×10-2-1.91×10-33.80% 调节时间/sΔf160.563.44.79% Δf26164.15.08% 绝对偏差积分/HzΔf10.308 40.321 44.21% Δf20.454 70.473 04.02% 总调节成本/$1 855.61 682.5-9.33% 煤耗量/t10.83710.152-6.32%
可见,LEMPC的动态调节过程与双层MPC基本相近,在优化调节过程经济性的同时,对控制性能造成的影响不大。双层MPC在动态调节过程中未考虑经济性,传统机组始终以最大爬坡率提升功率。而LEMPC策略在到达之前,运行于模态1,以综合性能指标为目标函数,调节成本较小的资源优先出力,降低了传统机组出力总和;在之后,运行于模态2,以频率稳定性为主,使得各资源快速达到稳态设定点。经计算,相较于双层MPC,LEMPC共节省总调节成本9.33%,减少煤耗量6.32%,较大地提升了系统频率调节过程的经济性。由此也说明了LEMPC可在保证系统频率稳定性的基础上,进一步动态优化系统经济性。
场景2:设定传统机组阀门约束、分别为0.08(pu)和0.1(pu);爬坡率约束均为0.2pu/min;AEVs可调功率约束为0.1(pu);联络线输送能力上下限为±0.1(pu)。假设 时,系统发生阶跃扰动
时,系统发生阶跃扰动 、
、 。
。
场景2是为了验证LEMPC在非零稳态最优设定点下的控制性能。此时,区域1可调容量不足,需联络线功率作支撑,经式(30)、式(31)优化给出稳态最优点。不同控制策略下系统动态响应过程如图11所示,不同控制策略对比结果见表3。可以看出,LEMPC仍可达到非零稳态最优设定点,且在动态性能相近的前提下,动态经济性优于双层MPC。
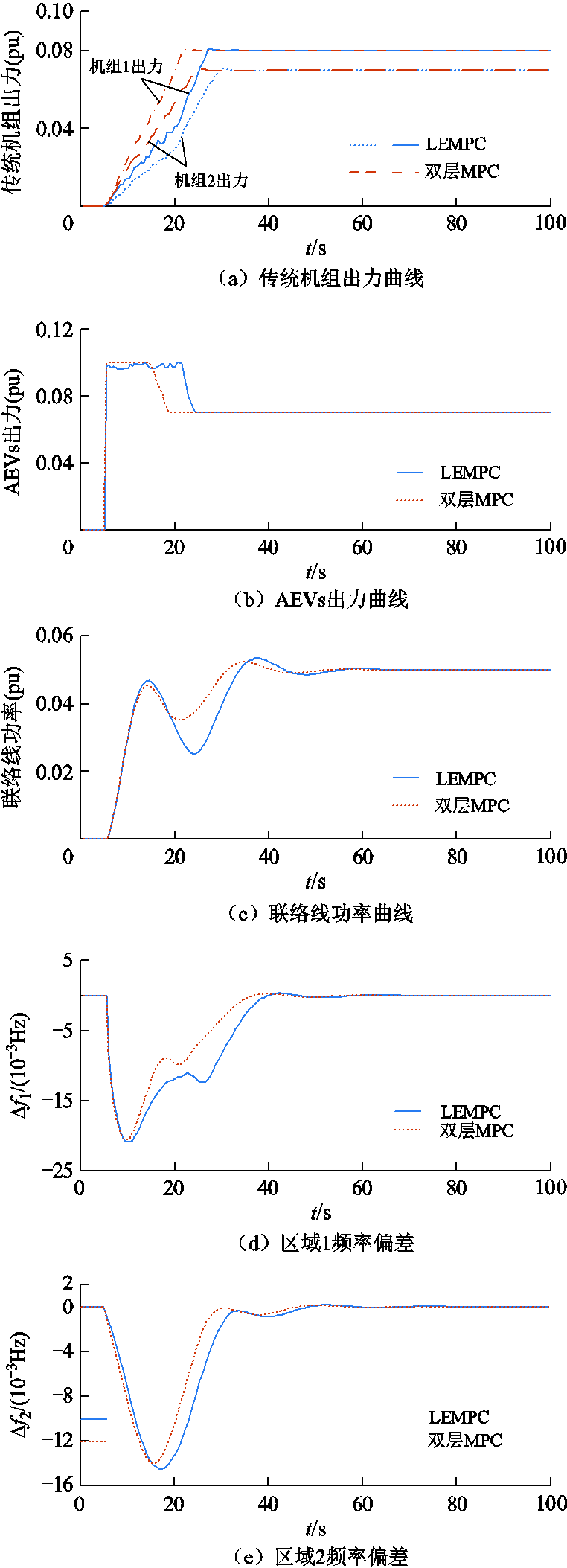
图11 不同控制策略下系统动态响应过程(场景2)
Fig.11 System dynamic response process under different control strategies (scene2)
表3 控制策略对比结果(场景2)
Tab.3 Control scenario comparison results (scene2)

参数双层MPCLEMPC百分比 最大频率偏差/Hz-0.020 5-0.021 23.41% -0.013 9-0.014 43.60% 调节时间/s62.562.80.48% 63641.59% 绝对偏差积分/Hz0.570 80.602 15.48% 0.383 90.410 26.85% 总调节成本/$1 780.21 614.5-9.32% 煤耗量/t9.6618.729 0-9.65%
场景3:AEVs、联络线参数同场景2;传统机组阀门约束 、
、 均为0.1(pu);假设系统发生阶跃扰动、
均为0.1(pu);假设系统发生阶跃扰动、 。场景3是为了对比本文策略与“AEVs优先调控”策略(称之为“对比策略”)。“AEVs优先调控”策略是指:在进行调频控制时,对下达的AGC指令优先由EV集群进行响应,若EV集群的响应能力不足,再由其他机组进行响应的策略。此时,系统总功率缺额大于AEVs的最大可调功率,但传统机组可调功率充足。不同控制策略下的系统动态响应曲线如图12所示。
。场景3是为了对比本文策略与“AEVs优先调控”策略(称之为“对比策略”)。“AEVs优先调控”策略是指:在进行调频控制时,对下达的AGC指令优先由EV集群进行响应,若EV集群的响应能力不足,再由其他机组进行响应的策略。此时,系统总功率缺额大于AEVs的最大可调功率,但传统机组可调功率充足。不同控制策略下的系统动态响应曲线如图12所示。

图12 不同策略下系统动态过程对比图(场景3)
Fig.12 Comparison diagram of system dynamic process under different strategies (scene3)
图12表明,两种策略下系统频率偏差最大值相近,均有较好的动态性能,这是由于在扰动发生瞬间,两种策略下AEVs均以最大可调功率快速响应来提供功率支撑。但不同点在于,对比策略达到稳态时,最终由AEVs和传统机组共同承担功率缺额;而本文策略顾及到了AEVs的充电需求,让传统机组功率逐渐爬升并最终承担全部功率缺额,AEVs出力则随之减少,逐渐恢复充电状态,如图12a、图12b所示。因此,本文策略可以在保证调节性能的前提下,协调传统机组和AEVs的出力,相较于“EV集群优先”策略,增大了传统机组的出力,提升了AEVs的充电量,更好地满足了AEVs充电需求。
4.4.1 AEVs出力仿真
为验证AEVs聚合模型对LEMPC优化EV出力的约束作用,选取18:00~20:00时段,对两区域互联系统分别施加随机扰动进行仿真分析。在随机负荷扰动下,AEVs的出力及其上、下限如图13所示。
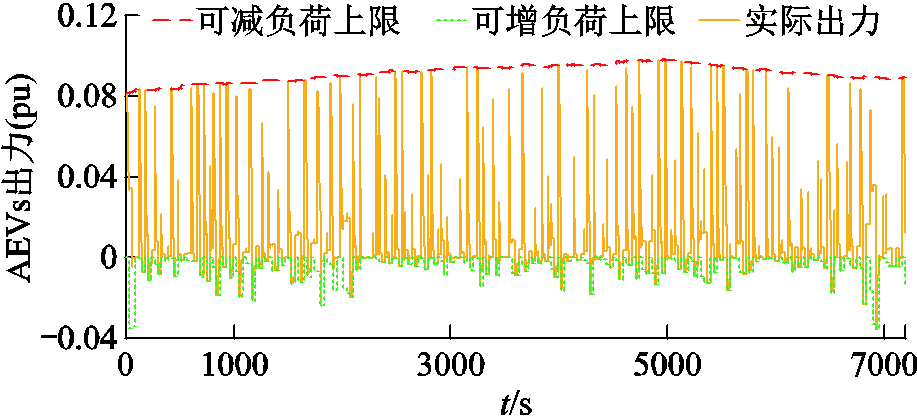
图13 AEVs实际出力及约束范围
Fig.13 Output and constraint range of AEVs
由图13可见,AEVs的出力始终满足可调功率约束。进一步对比图9和图13可知,AEVs的可削减负荷上限始终是充电负荷的2倍,即全部充电的EV转变为放电状态时,AEVs可对外提供最大功率。反观可增负荷上限,明显小于可减负荷,且每个扰动产生瞬间数值参差不齐。这是由于LEMPC控制策略执行“传统机组为主、AEVs为辅”的调频理念,尽量保障EV的充电时长。当区域内传统机组容量充足时,AEVs的稳态设定点为0,即随着火电机组的功率爬升,AEVs出力逐渐恢复至初始状态(充电状态),从而使得扰动发生时AEVs最大可增加负荷取决于上个扰动调节结束时AEVs运行状态。
4.4.2 系统频率调节
为了进一步说明AEVs对系统频率调节的影响,以及本文所提策略的有效性,仍选取相同时段对两区域施加随机负荷扰动进行仿真,结果如图14和表4所示。
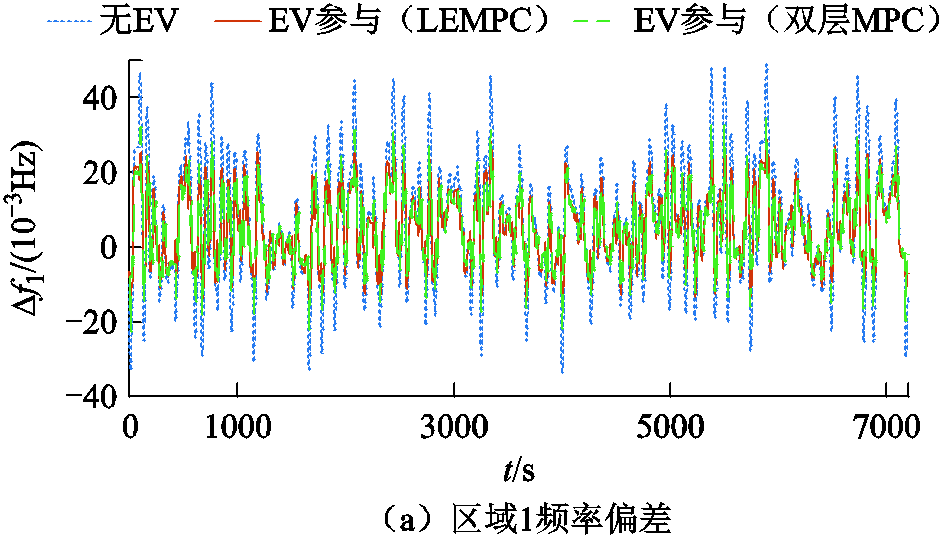
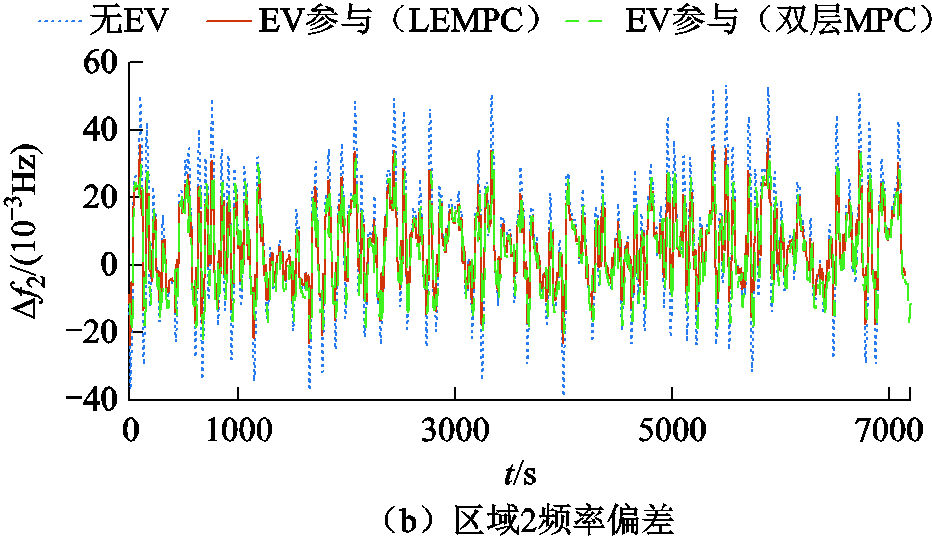
图14 区域频率偏差对比图
Fig.14 Comparison chart of regional frequency deviation
表4 有无EV参与频率调节对比结果
Tab.4 Comparison results of frequency regulation with and without EV
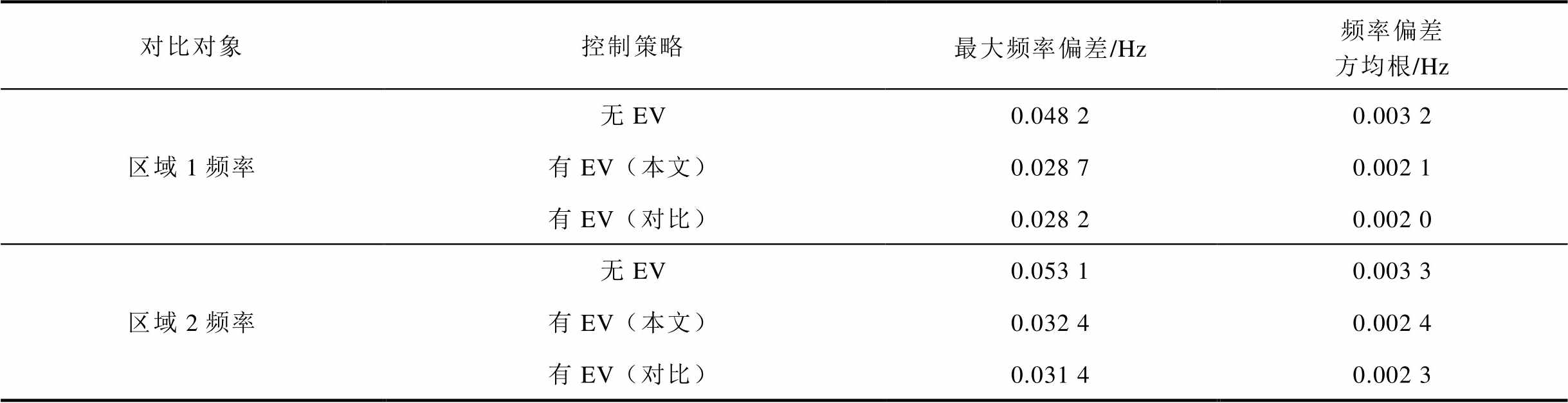
对比对象控制策略最大频率偏差/Hz频率偏差方均根/Hz 区域1频率无EV0.048 20.003 2 有EV(本文)0.028 70.002 1 有EV(对比)0.028 20.002 0 区域2频率无EV0.053 10.003 3 有EV(本文)0.032 40.002 4 有EV(对比)0.031 40.002 3
通过计算,并结合图14可知,AEVs参与调频能够更快速有效地抑制频率偏差。在两种不同的策略下,EV的参与均使区域频率调节性能改善,其中,在本文控制策略下两区域最大频率偏差分别降低了40.5%和38.9%,频率偏差方均根分别降低了34.4%和27.3%;双层MPC控制策略下两区域最大频率偏差分别降低了41.3%和40.9%,频率偏差方均根分别降低了35.6%和28.9%;调节性能相差甚微,但本文控制策略共节省调节成本$11 786。这表明在发生负荷扰动时AEVs能够快速响应,为系统提供功率支撑,同时,本文控制策略可以在满足频率调节要求的前提下进一步优化调节成本。
本文在模型聚合过程中选则SOC大区间数量N=20,选取每个大区间下的小区间数量n=10 000,在有效避免维数爆炸问题的同时也保证了在0.1s步长下SOC区间转移概率有足够的精度;小区间只参与一次一步转移概率的求解,故对聚合模型的求解速度基本不存在影响。将本文建立的AEVs聚合模型和控制策略在Intel Core i7-10875H CPU@ 2.30GHz和16GB的RAM计算平台上运行,并通过Matlab 2017b调用Gurobi工具箱对控制问题进行求解,每一次的控制量求解大约为0.005~0.01s。
为弥补新能源电力系统中调频资源不足的问题,本文研究了AEVs参与电网调频的控制策略,得到以下结论:
1)利用马尔科夫链理论,提出了AEVs动态演化过程转移概率计算方法,构建了考虑电池容量差异的聚合模型,该模型能够准确地描述AEVs负荷动态演化过程,同时有效降低了聚合模型的维度。
2)基于两区域互联系统调频控制架构,提出了基于LEMPC的AEVs辅助电网双模态调频控制策略,模态1下追求稳定域内的综合性能指标,模态2通过线性反馈辅助控制器驱动系统快速收敛到稳态最优点。与双层MPC相比,该控制策略在保证系统频率稳定的前提下,进一步优化了频率调节过程的经济性。
3)提出的控制策略协调了各调频资源出力,充分利用了各类资源特性;通过发挥EV的快速响应特性,降低了区域频率偏差,提升了系统频率调节性能。
1. 闲置及放电状态聚合模型
闲置状态聚合模型为
 (A1)
(A1)
式中, 为第i个状态区间的闲置负荷数量。
为第i个状态区间的闲置负荷数量。
放电状态聚合模型为
 (A2)
(A2)
式中,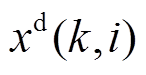 为第i个状态区间的放电负荷数量;
为第i个状态区间的放电负荷数量; 为放电过程状态转移矩阵,可写为
为放电过程状态转移矩阵,可写为
 (A3)
(A3)
式中, 为相邻两个区间的放电转移概率。
为相邻两个区间的放电转移概率。
2. 典型两区域互联系统频率动态响应模型
附图1 两区域电网频率动态响应模型
App.Fig.1 Frequency dynamic response model of two-area power grid
3. 两区域调频控制模型各参数矩阵元素
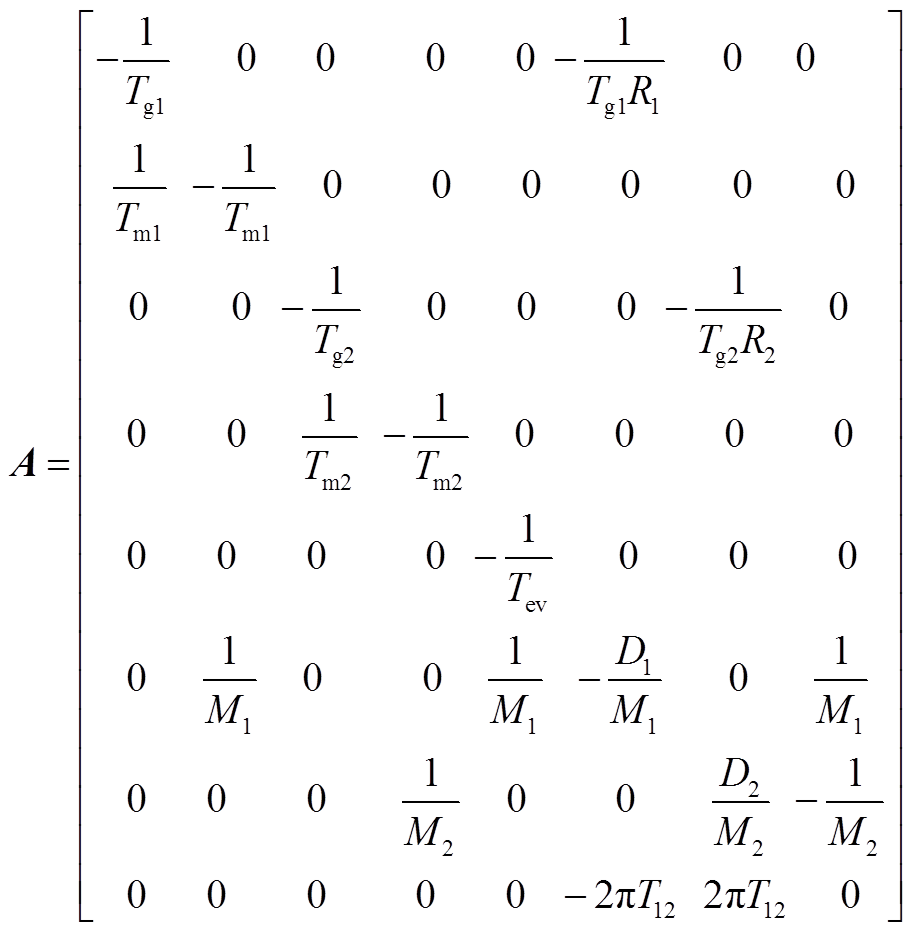 (A4)
(A4)
 (A5)
(A5)
 (A6)
(A6)
 (A7)
(A7)
4. 调频资源模型参数
附表1 各调频资源模型参数
App.Tab.1 Frequency regulation resource model parameters
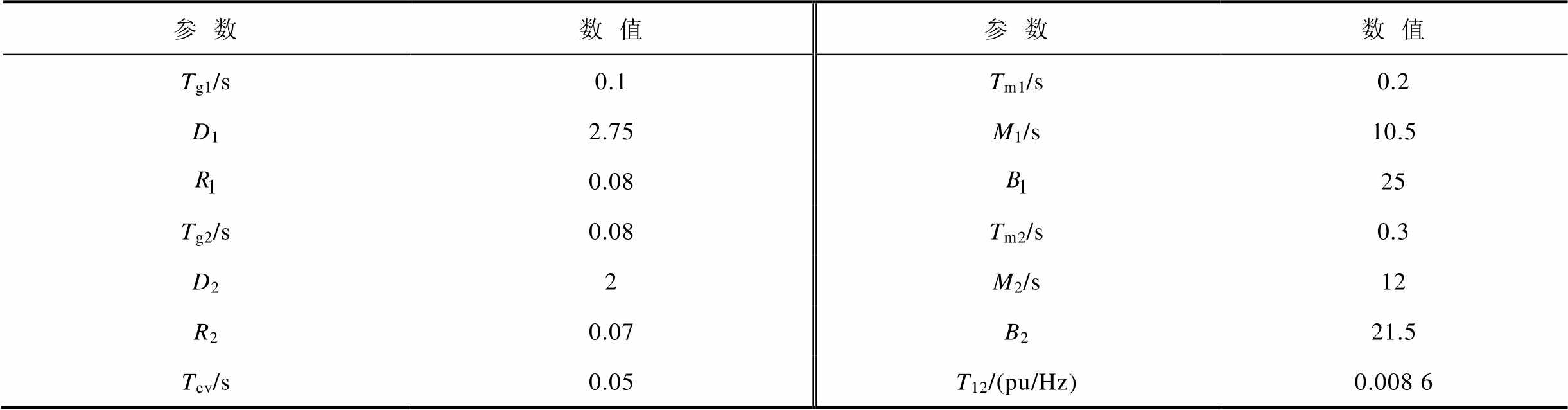
参数数值参数数值 Tg1/s0.1Tm1/s0.2 D12.75M1/s10.5 0.0825 Tg2/s0.08Tm2/s0.3 D22M2/s12 R20.07B221.5 Tev/s0.05T12/(pu/Hz)0.008 6
附表2 各调频资源经济性参数
App.Tab.2 Economic parameters of frequency regulation resources
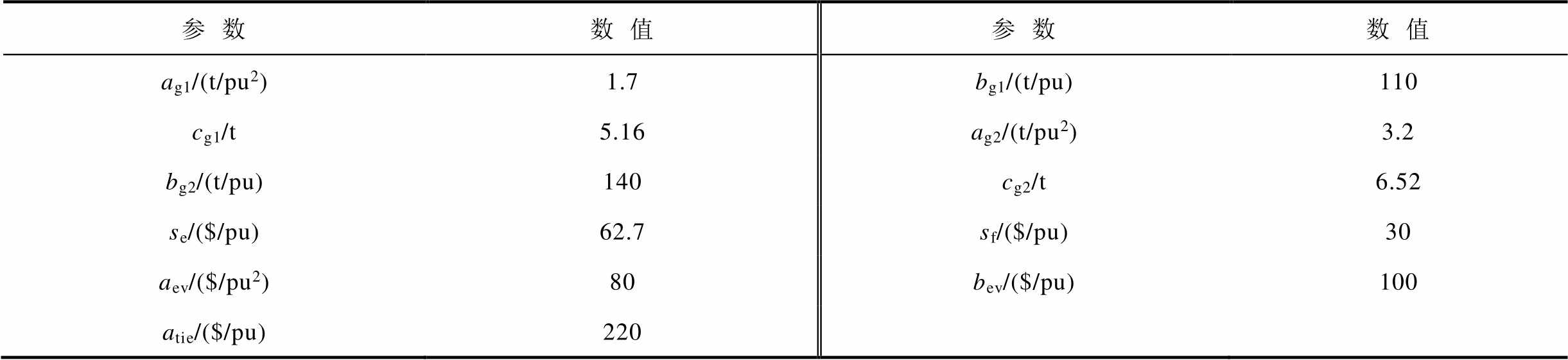
参数数值参数数值 ag1/(t/pu2)1.7bg1/(t/pu)110 cg1/t5.16ag2/(t/pu2)3.2 bg2/(t/pu)140cg2/t6.52 se/($/pu)62.7sf/($/pu)30 aev/($/pu2)80bev/($/pu)100 atie/($/pu)220
5. 权重系数的选取
综合性能指标主要包含频率调节指标和经济性指标两部分。以AEVs和联络线功率调节成本为基准,选取权重系数为1;调节过程中应减少煤耗量以及气体排放量,火电机组调节成本权重系数选取略大于其他调节方式,选取系数为10;经济性指标确定后,改变频率调节指标权重系数进行仿真,分析系数对系统产生的影响,结果如附图2所示。
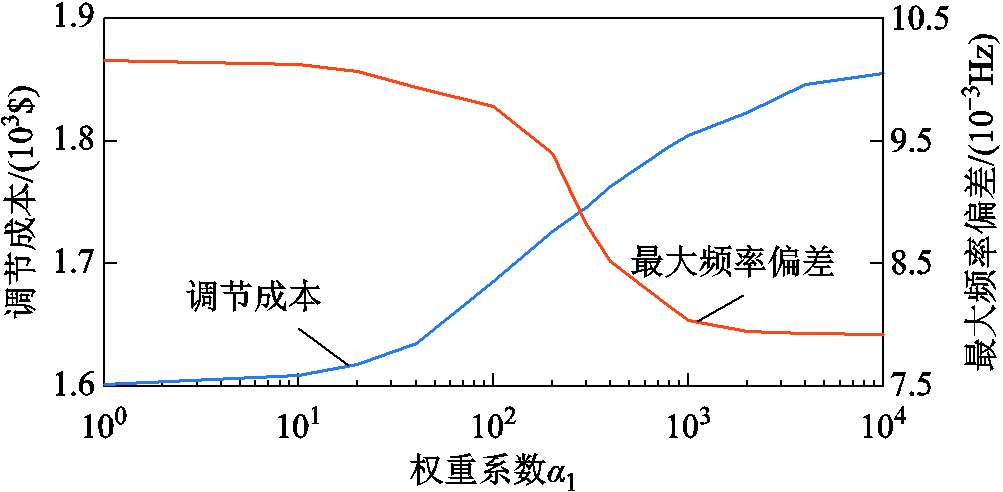
附图2 不同权重系数下优化结果
App.Fig.2 Optimization results under different weight coefficients
可见,当α1取(100,102)时,成本与频率偏差变化速度缓慢,且此时频率偏差较大;当α1取(102,103)时,调节成本随系数的增大而增大,同时,最大频率频率偏差急剧下降;当α1取(103,104)时,最大频率偏差仍呈下降趋势,但变化幅度不大;而调节成本随着系数的增大仍保持增长趋势。基于上述分析,选取α1=1000时,优化过程可以保证较好的频率调节性能,同时降低了调节成本。从以上过程可以看出不同权重系数的变化趋势,为了获取更加精确的权重系数,经过天牛须优化算法最终选取权重系数α1、α2、α3和α4分别为1 007.30、8.68、1.24和9.87。
参考文献
[1] 姚一鸣, 赵溶生, 李春燕, 等. 面向电力系统灵活性的电动汽车控制策略[J]. 电工技术学报, 2022, 37(11): 2813-2824.
Yao Yiming, Zhao Rongsheng, Li Chunyan, et al. Control strategy of electric vehicles oriented to power system flexibility[J]. Transactions of China Electrotechnical Society, 2022, 37(11): 2813-2824.
[2] 张一媚, 董朝宇, 董晓红, 等. 含电动汽车集群调频的信息能源系统谱特征和稳定性评估[J]. 电力系统自动化, 2021, 45(2): 12-20.
Zhang Yimei, Dong Chaoyu, Dong Xiaohong, et al. Spectral feature and stability assessment for cyber-energy system with frequency regulation of electric vehicle cluster[J]. Automation of Electric Power Systems, 2021, 45(2): 12-20.
[3] 黄小庆, 陈颉, 谢啟波, 等. 用户充电选择对电网充电调度的影响[J]. 电工技术学报, 2018, 33(13): 3002-3011.
Huang Xiaoqing, Chen Jie, Xie Qibo, et al. The influence of users' charging selection on charging schedule of power grid[J]. Transactions of China Electrotechnical Society, 2018, 33(13): 3002-3011.
[4] 吴赋章, 杨军, 林洋佳, 等. 考虑用户有限理性的电动汽车时空行为特性[J]. 电工技术学报, 2020, 35(7): 1563-1574.
Wu Fuzhang, Yang Jun, Lin Yangjia, et al. Research on spatiotemporal behavior of electric vehicles considering the users' bounded rationality[J]. Transactions of China Electrotechnical Society, 2020, 35(7): 1563-1574.
[5] 吴洲洋, 艾欣, 胡俊杰. 需求侧灵活性资源参与调频辅助服务的备用优化与实时调度[J]. 电力系统自动化, 2021, 45(6): 148-157.
Wu Zhouyang, Ai Xin, Hu Junjie. Reserve optimization and real-time scheduling of frequency regulation ancillary service with participation of flexible resource on demand side[J]. Automation of Electric Power Systems, 2021, 45(6): 148-157.
[6] Bashash S, Fathy H K. Modeling and control of aggregate air conditioning loads for robust renewable power management[J]. IEEE Transactions on Control Systems Technology, 2013, 21(4): 1318-1327.
[7] 艾欣, 赵阅群, 周树鹏. 适应清洁能源消纳的配电网集群电动汽车充电负荷模型与仿真研究[J]. 中国电力, 2016, 49(6): 170-175.
Ai Xin, Zhao Yuequn, Zhou Shupeng. Study on aggregate electric vehicle charging load model and simulation for clean energy accommodation in distribution network[J]. Electric Power, 2016, 49(6): 170-175.
[8] Le Floch C, Kara E C, Moura S. PDE modeling and control of electric vehicle fleets for ancillary services: a discrete charging case[J]. IEEE Transactions on Smart Grid, 2018, 9(2): 573-581.
[9] 陆婷婷. 空调负荷的储能建模和控制策略研究[D]. 南京: 东南大学, 2015.
[10] 张谦, 周林, 周雒维, 等. 计及电动汽车充放电静态频率特性的负荷频率控制[J]. 电力系统自动化, 2014, 38(16): 74-80.
Zhang Qian, Zhou Lin, Zhou Luowei, et al. Load frequency control considering charging and discharging static frequency characteristics of electric vehicles[J]. Automation of Electric Power Systems, 2014, 38(16): 74-80.
[11] 鲍谚, 贾利民, 姜久春, 等. 电动汽车移动储能辅助频率控制策略的研究[J]. 电工技术学报, 2015, 30(11): 115-126.
Bao Yan, Jia Limin, Jiang Jiuchun, et al. Research on the control strategy of electric vehicle mobile energy storage in ancillary frequency regulation[J]. Transactions of China Electrotechnical Society, 2015, 30(11): 115-126.
[12] 季振亚. 能源互联网包容下电动汽车储能及气电互联的市场化设计[D]. 南京: 东南大学, 2018.
[13] 虞临波, 寇鹏, 冯玉涛, 等. 风储联合发电系统参与频率响应的模型预测控制策略[J]. 电力系统自动化, 2019, 43(12): 36-43.
Yu Linbo, Kou Peng, Feng Yutao, et al. Model predictive control strategy for combined wind-storage system to participate in frequency response[J]. Automation of Electric Power Systems, 2019, 43(12): 36-43.
[14] 樊国东, 刘世林, 裴俊, 等. 光火储混合发电系统的负荷频率协调优化控制[J]. 电力系统及其自动化学报, 2020, 32(12): 134-143.
Fan Guodong, Liu Shilin, Pei Jun, et al. Load frequency coordinated optimization control of hybrid power generation system consisting of PV, thermal power and energy storage[J]. Proceedings of the CSU-EPSA, 2020, 32(12): 134-143.
[15] 张舒鹏, 董树锋, 徐成司, 等. 大规模储能参与电网调频的双层控制策略[J]. 电力系统自动化, 2020, 44(19): 55-62.
Zhang Shupeng, Dong Shufeng, Xu Chengsi, et al. Bi-level control strategy for power grid frequency regulation with participation of large-scale energy storage[J]. Automation of Electric Power Systems, 2020, 44(19): 55-62.
[16] 廖小兵, 刘开培, 乐健, 等. 基于双层模型预测结构的跨区域AGC机组协同控制策略[J]. 中国电机工程学报, 2019, 39(16): 4674-4685, 4970.
Liao Xiaobing, Liu Kaipei, Le Jian, et al. Coordinated control strategy for AGC units across areas based on Bi-level model predictive control[J]. Proceedings of the CSEE, 2019, 39(16): 4674-4685, 4970.
[17] Heidarinejad M, Liu J, Christofides P D. Economic model predictive control of nonlinear process syetems using Lyapunov techniques[M]. London: Advances in Industrial Control, 2017.
[18] 董锴, 蔡新雷, 崔艳林, 等. 基于马尔科夫链的电动汽车聚合建模及多模式调频控制策略[J]. 电网技术, 2022, 46(2): 622-631.
Dong Kai, Cai Xinlei, Cui Yanlin, et al. Aggregation modeling based on Markov chain and multi-mode control strategies of aggregated electric vehicles for frequency regulation[J]. Power System Technology, 2022, 46(2): 622-631.
[19] 黄际元, 李欣然, 曹一家, 等. 面向电网调频应用的电池储能电源仿真模型[J]. 电力系统自动化, 2015, 39(18): 20-24, 74.
Huang Jiyuan, Li Xinran, Cao Yijia, et al. Battery energy storage power supply simulation model for power grid frequency regulation[J]. Automation of Electric Power Systems, 2015, 39(18): 20-24, 74.
[20] 李清, 张孝顺, 余涛, 等. 电动汽车充换电站参与电网AGC功率分配的成本一致性算法[J]. 电力自动化设备, 2018, 38(3): 80-87, 95.
Li Qing, Zhang Xiaoshun, Yu Tao, et al. Cost consensus algorithm of electric vehicle charging station participating in AGC power allocation of grid[J]. Electric Power Automation Equipment, 2018, 38(3): 80-87, 95.
[21] Kothare M V, Balakrishnan V, Morai M. Robust constrained model predictive control using linear matrix inequalities[J]. Automatica, 1996, 32(10): 1361-1379.
[22] Koch S, Mathieu J, Callaway D. Modeling and control of aggregated heterogeneous thermostatically controlled loads for ancillary services[C]//Power System Computation Conference, Stockholm, Sweden, 2011: 22-26.
[23] Khan A T, Cao Xinwei, Li Shuai, et al. Quantum beetle antennae search: a novel technique for the constrained portfolio optimization problem[J]. Science China Information Sciences, 2021, 64(5): 1-14.
Auxiliary Frequency Regulation Control Strategy of Aggregated Electric Vehicles Based on Lyapunov-Based Economic Model Predictive Control
Abstract Aiming at the problems of ignoring the differences among individuals for electric vehicles (EV) aggregation modeling and difficulty in balancing economy and stability simultaneously for frequency regulation assisted with EV, firstly, a transition probability calculation method considering the difference of battery capacity for the dynamic change process of EV was proposed based on Markov theory and the transition probability distribution function of the state of charge is derived. An aggregation model of EV was established and a combined frequency regulation model of typical two-area interconnection system participated by EV was built. Then, the dual-mode frequency regulation scenario based on the Lyapunov-based economic model predictive control was proposed. The adjustment cost through economic model prediction was reduced by Mode 1, and the system stability is guaranteed by Mode 2 using the auxiliary controller. Finally, the simulation results show that the aggregation model has high precision, and the control strategy can optimize the economy in regulation process while maintaining frequency stability.
keywords:Electrics vehicle,transition probability,aggregation model,load frequency control,Lyapunov-based economic model predictive control
DOI:10.19595/j.cnki.1000-6753.tces.220538
中图分类号:TM73;U491.8
国家重点研发计划资助项目(2018YFE0122200)。
收稿日期 2022-04-07
改稿日期 2022-06-10
余 洋 男,1982年生,博士,副教授,博士生导师,研究方向为电力储能技术、柔性负荷建模与调度等。E-mail:ncepu_yy@163.com(通信作者)
张瑞丰 男,1999年生,硕士研究生,研究方向为主动配电网、车网互动等。E-mail:1196515347@qq.com
(编辑 赫蕾)