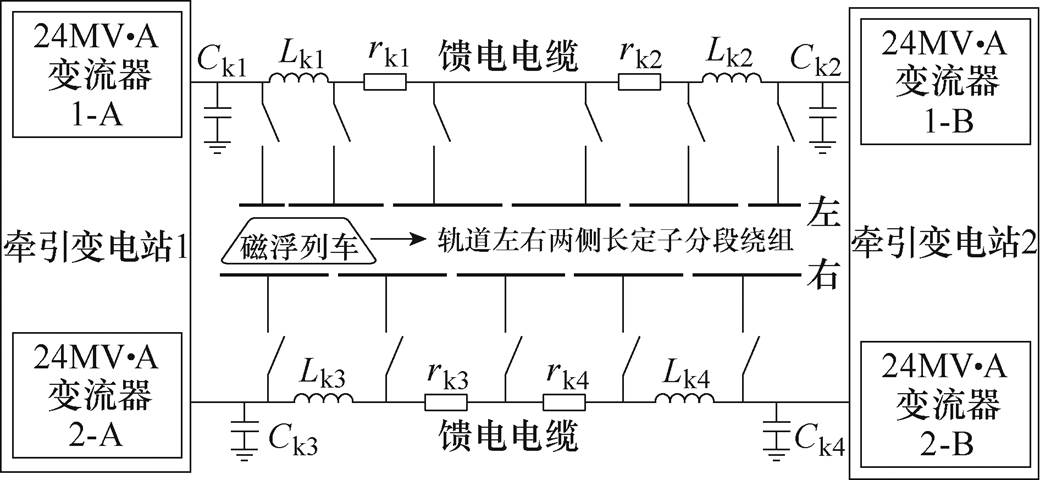
图1 高速磁悬浮列车的牵引供电系统
Fig.1 Traction power supply system of high-speed maglev train
摘要 高速磁悬浮列车采用长定子直线同步电机驱动,列车运行时电机定子相电流存在大量的谐波,这将影响列车的牵引控制性能并造成牵引力波动。该文针对谐波含量较高的5次和7次谐波电流推导双端供电模式下长定子直线同步电机的谐波电压数学模型,通过坐标变换与低通滤波的方式提取出谐波电流,设计基于积分滑模的谐波控制器,并在控制系统中增添谐波电流环,从而抑制电机定子电流中的5次和7次谐波分量。最后,对所提出的控制策略与传统谐波抑制策略分别进行硬件在环实验,通过对实验结果进行对比,证明所提出的策略具有更强的谐波抑制 能力。
关键词:高速磁悬浮列车 双端供电 谐波抑制 坐标变换 谐波电压模型 积分滑模控制
高速磁悬浮列车由于脱离了地面黏着力的束缚,与传统轮轨列车相比,具有高速度、低损耗、适合远程运输的特点[1]。高速磁悬浮列车采用长定子直线同步电机(Long Stator Linear Synchronous Motor, LSLSM)进行驱动,对电机的高性能控制是高速磁悬浮列车系统的一项核心技术。高速磁悬浮列车的牵引供电系统如图1所示,磁悬浮列车在低速时由一端变电站通过馈电电缆对轨道定子段绕组进行供电,即为单端供电模式;高速时由两端变电站同时向定子段供电,即为双端供电模式,该模式相当于两端的功率模块并联给定子绕组供电,可以提供足够大的馈电电流,从而满足列车在高速运行时所需的牵引力,并且降低了每台变流器单元的设计容量,满足列车在高速运行时的供电需求[2]。
图1 高速磁悬浮列车的牵引供电系统
Fig.1 Traction power supply system of high-speed maglev train
在高速磁悬浮大功率牵引供电系统中,牵引变流器采用的是两套有源中点钳位(Active Neutral- Point-Clamped, ANPC)变流器,开关器件采用IGBT,其结构采取背靠背共用直流母线拓扑[3]。为了确保同一桥臂上的开关器件不发生直通短路,必须引入死区时间。由于变流器的低开关频率、开关器件的死区和管压降导致的变流器非线性,使得输出电压产生畸变。另外,由于长定子直线同步电机铁心开槽、绕组分布非正弦性以及磁饱和等原因,电机气隙磁场将发生畸变。以上原因导致电机定子相电流中的谐波含量增加,5、7次谐波是其中的主要成分[4-7]。这将导致列车牵引力产生波动,增加电机的噪声和损耗,从而影响牵引控制性能的稳定和安全。所以对上述问题的研究是十分必要的,目前尚缺乏对高速磁悬浮列车电机谐波电流抑制的相关研究。
当前有关谐波电流抑制的方案主要集中在对电机本体的优化以及对变流器和电机的控制策略两个方面。电机设计优化主要通过优化电机齿槽结构与绕组分布从而提高气隙磁场的正弦度。由于高速磁悬浮列车的电机再设计具有较高的成本,且单纯的电机优化设计无法抑制变流器非线性带来的谐波,考虑从控制策略上对谐波进行抑制更为必要。文献[8]对当前广泛研究的几种谐波抑制策略进行了对比;文献[9]采用了重复控制器的谐波抑制方法,但该控制器响应速度较慢,难以对变频谐波进行抑制;文献[10]推导了电流谐波的解析表达式,电机电流与滤波后的电流相减得到总谐波电流并通过PI控制器进行抑制,该策略实现简单但对高次交流量谐波抑制能力有限;文献[11-12]采用比例谐振控制器,但是多个谐振控制器并联会影响系统的稳定性,且不易应用于变频系统。文献[13-14]采用基于坐标变换与PI控制的抑制策略,这种方法使用较为普遍,但是受到PI控制器本身性能的限制,不能满足快速响应的要求,谐波电流抑制能力有限。其中,文献[13]为高速永磁同步电机设计了闭环检测系统,从而实现指定频率的谐波电流精确检测。然而,该算法占用处理器大量的计算时间,所调参数较多,降低了系统的动态性能。此外,文献[15]提出了基于扩张状态观测器的电机电流谐波抑制策略,将谐波电流的不确定性视为一种未知扰动,从而实现对所有电流谐波分量的抑制,但是该算法较为复杂,并且在母线电压有限时,会影响电机基频电流的输出能力。对于高速磁悬浮列车而言,谐波电流对列车牵引控制稳定性造成较为明显的影响,所以需要研究一种更为有效的电流谐波抑制策略。
滑模变结构控制具有强鲁棒性、快速动态响应并且方法简单等优点,目前吸引了较多的学者展开研究以应用于电机的状态观测与控制中。由于系统处于滑模状态时存在抖振的问题,消除抖振也是该控制策略的研究热点。文献[16-18]则通过改进滑模面、开关函数和趋近律抑制抖振,这同样是削弱抖振的主流策略。上述方法在设计滑模面时会引入状态量的微分,这一过程会引入高频噪声,从而影响系统的动态性能。文献[19]将积分滑模面应用到了电流环控制中,通过积分项的引入,避免了微分项的影响;文献[20]选择速度和推力作为状态变量,同样设计了积分滑模面。
当前少有将滑模变结构控制应用于电机谐波电流抑制的相关研究。本文基于高速磁悬浮列车在双端供电模式下长定子直线电机的数学模型建立了电机的谐波电压方程,通过同步旋转坐标变换提取了磁悬浮列车在双端供电模式下的5、7次谐波电流,提出了基于积分滑模的谐波电流抑制策略。基于RT-Lab的高速磁悬浮半实物系统硬件在环实验,通过与传统电流谐波抑制策略对比,验证了所提出控制策略的有效性。
高速磁悬浮列车处于双端并联的供电模式下的等效电路如图2所示。图中,ua1、ub1、uc1和ua2、ub2、uc2分别为两端变流器的输出电压;ia1、ib1、ic1和ia2、ib2、ic2分别为两端变流器的输出电流;uaS、ubS、ucS和iaS、ibS、icS分别为电机的定子绕组端部电压和定子绕组三相电流;Rk1、Rk2和Lk1、Lk2分别为两侧馈电电缆的电阻和电感。
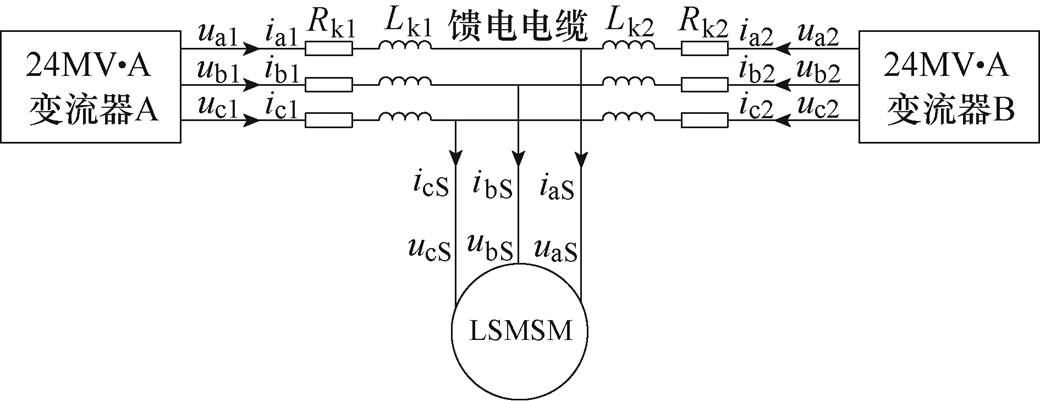
图2 双端供电模式下长定子直线同步电机等效电路
Fig.2 Equivalent circuit of LSLSM underdouble feed mode
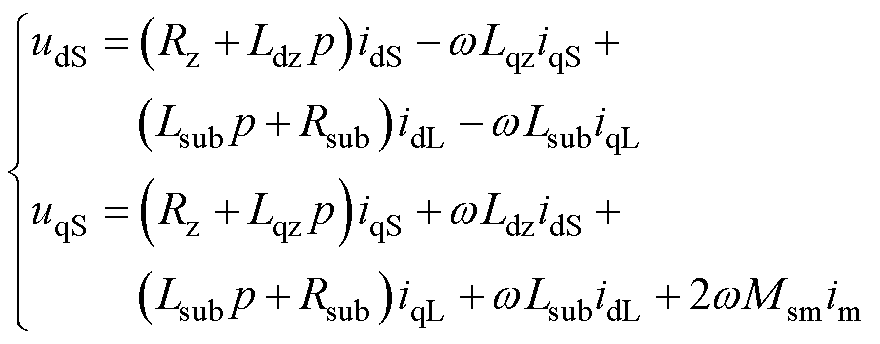
根据图2所示,又为了简化数学模型的耦合项,方便对电机进行直接控制,以变流器A和变流器B输出的电压之和与电压之差作为输入,以变流器A和变流器B共同输出到电机的总电流和环流作为状态变量。根据文献[21]的相关推导,得到对直接模式下双端供电模式的长定子直线同步电机在dq坐标系下的数学模型为
 (1)
(1)
其中
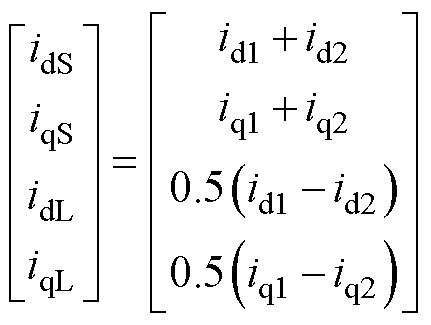
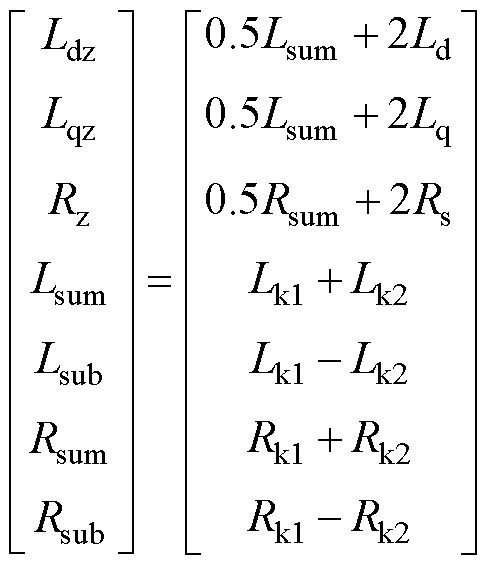
式中,udS、uqS分别为变流器A和变流器B输出的电压之和在dq坐标系下的分量;idS、iqS和idL、iqL分别为变流器A和变流器B共同输出到电机的总电流和两台变流器之间的环流在dq坐标系下的分量;Ld、Lq为在dq坐标系下的电机定子绕组电感;Rs为定子电阻;Msm为定子绕组与励磁绕组的互感;im为动子励磁电流;ud1、uq1、id1、iq1和ud2、uq2、id2、iq2分别为变流器A和变流器B的输出电压、输出电流在dq坐标系下的分量;v为列车速度;t 为极距;w 为电机同步角速度;p为微分算子;Ldz、Lqz、Rz、Lsum、Lsub、Rsum、Rsub为双端供电模式下相关阻感变量的合并项。
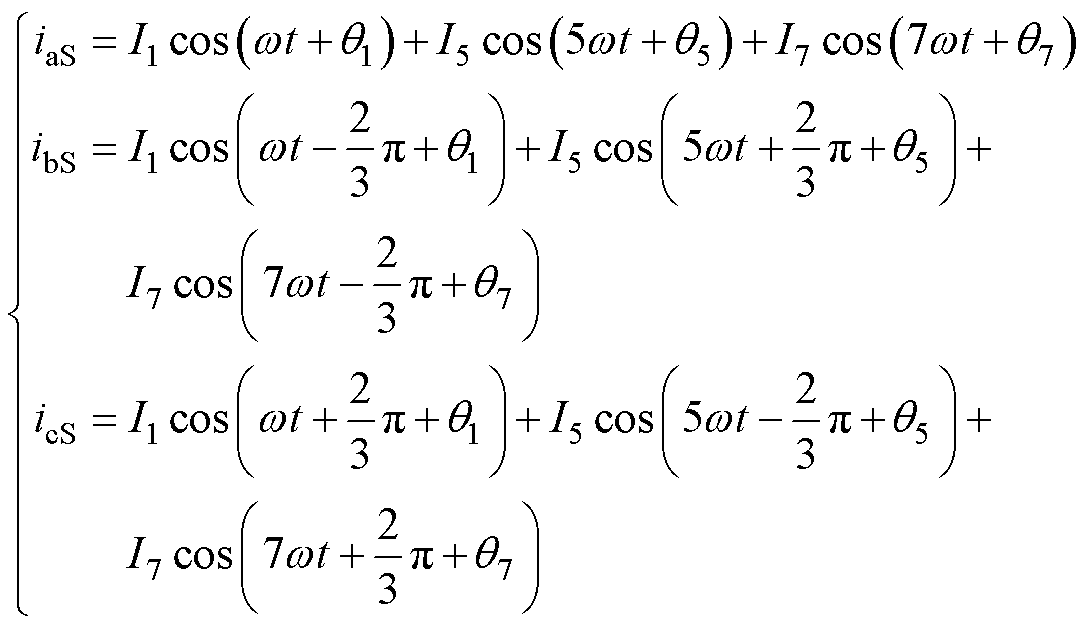
由文献[14]可知,6N-1次谐波为负序电流,6N+1次谐波为正序电流(N=1, 2, 3,…)。因此考虑5、7次谐波的电机定子三相电流可表示为
 (2)
(2)
式中,I1、I5、I7、q1、q5、q7分别为电机1、5、7次相电流幅值与初始相位。
等幅值坐标变换至基波dq旋转坐标系可得
 (3)
(3)
对式(3)求微分
 (4)
(4)
将式(3)、式(4)代入式(1)并忽略数值较小的环流项可得
 (5)
(5)
从式(5)中分别提取出5、7次谐波电压方程为
 (6)
(6)
 (7)
(7)
式中,udS5、uqS5、udS7、uqS7分别为考虑5、7次电机谐波电流的变流器A和变流器B输出的电压之和在基频dq坐标系下的分量。
将式(6)、式(7)分别转换到5、7次dq坐标系下,则有
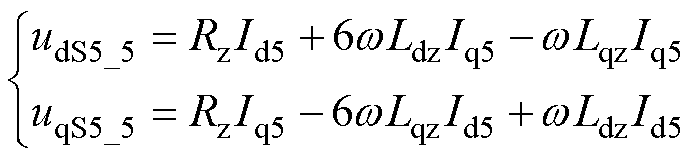 (8)
(8)
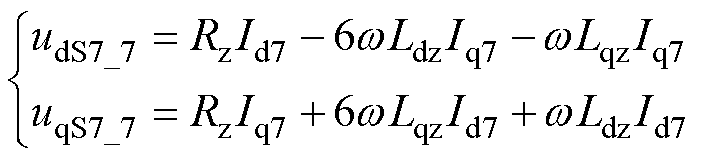 (9)
(9)
式中,udS5_5、uqS5_5、udS7_7、uqS7_7分别为udS5、uqS5、udS7、uqS7在5、7次dq坐标系下的分量;Id5、Iq5、Id7、Iq7分别为5、7次谐波电流在5、7次dq坐标系下的分量。
至此,推导得到双端供电模式下高速磁悬浮列车5、7次谐波电压方程。
5次旋转坐标系下dq轴电机电流方程可表示为
 (10)
(10)
式中,iqh5、idh5分别为iqh、idh在5次谐波dq旋转坐标系下的分量。
7次旋转坐标系下dq轴电机电流方程可表示为
 (11)
(11)
式中,iqh7、idh7分别为iqh、idh在7次谐波dq旋转坐标系下的分量。
由式(10)、式(11)可知,在5、7次旋转坐标系下,除三相电流中的5、7次谐波电流为直流外,其余电流成分均为交流,所以经低通滤波器可提取出各次谐波电流的幅值。由于高速磁悬浮列车的速度范围较宽,低通滤波器应采取与列车运行速度成正比的变截止频率。
谐波提取的原理框图如图3所示。
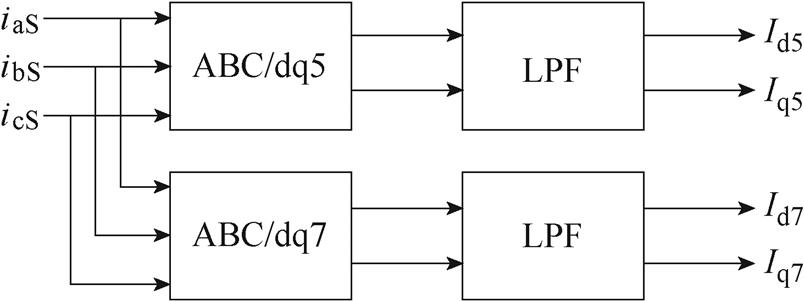
图3 采用坐标变换和低通滤波的谐波电流提取框图
Fig.3 Block diagram of harmonic current extraction using coordinate transformation and low-pass filter
滑模变结构控制下的系统状态分为趋近运动和滑模运动两个阶段[22]。在使用滑模变结构控制时,不仅要使系统状态由趋近运动迅速到达滑模运动状态,也要削弱进入滑模运动时带来的抖振。
选择合适的滑模趋近律可以使系统有效趋近滑模面,目前广泛采用的是指数趋近律,本文采用一种改进型变指数趋近律,即
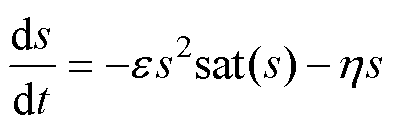 (12)
(12)
其中
 (13)
(13)
式中, 为指数趋近项,且
为指数趋近项,且 >0;
>0; 为等速趋近项,且
为等速趋近项,且 >0,sat(s)为饱和函数;s为滑模面的切换函数;l 为饱和函数边界层参数。
>0,sat(s)为饱和函数;s为滑模面的切换函数;l 为饱和函数边界层参数。
指数趋近项使得趋近速度逐渐减小至零,而等速趋近项保证了在有限时间内到达滑动模态。等速趋近项由于s2的作用可以使系统在远离滑模面时加速趋近,接近滑模面时不断衰减。最终系统状态到达原点,从而使等速趋近项中的符号函数为零,抖振也得以消除。另外,使用饱和函数进一步削弱了抖振。
为了证明该趋近律的选择使得系统稳定且满足滑模到达条件,选取李雅普诺夫函数为
 (14)
(14)
对式(14)求导,由于sat(s)和s的正负一致且, >0,则当s≠0时
 (15)
(15)
综上,采用改进型变指数趋近律使得系统总是满足系统的可达性条件,保证了系统可以进入滑动模态且稳定。
传统滑模面的选取会引进状态量得二阶微分,为了减小高阶微分带来的系统高频噪声,同时减小稳态误差,本文选取积分滑模面为
 (16)
(16)
式中,c为积分常数;x1、x2为系统状态变量。
根据谐波提取环节得到的5、7次谐波电流的幅值,构建滑模面的状态变量。
取5次d轴谐波电流为状态变量,即
 (17)
(17)
式中, 为5次d轴谐波电流参考值且=0。
为5次d轴谐波电流参考值且=0。
结合式(8)求导可得
 (18)
(18)
结合式(12),对式(16)求导
 (19)
(19)
由式(18)、式(19)得到d轴5次谐波电流控制器的控制律
 (20)
(20)
同理可推得q轴5次谐波电流控制器的控制律
 (21)
(21)
取7次d轴谐波电流为状态变量,即
 (22)
(22)
式中, 为7次d轴谐波电流参考值且=0。
为7次d轴谐波电流参考值且=0。
结合式(9)求导可得
 (23)
(23)
由式(19)、式(23)得d轴7次谐波电流控制器的控制律为
 (24)
(24)
同理可推得q轴7次谐波电流控制器的控制律为
 (25)
(25)
最后将控制器生成的参考电压经坐标变换至基频dq旋转坐标系并补偿至电流环参考电压中。
综上所述,基于积分滑模电机谐波电流抑制的速度电流闭环控制框图如图4所示。图中,udS5、uqS5、udS7、uqS7分别为udS5_5、uqS5_5、udS7_7、uqS7_7在基频dq坐标系下的分量,表示谐波电压的前馈补偿量。
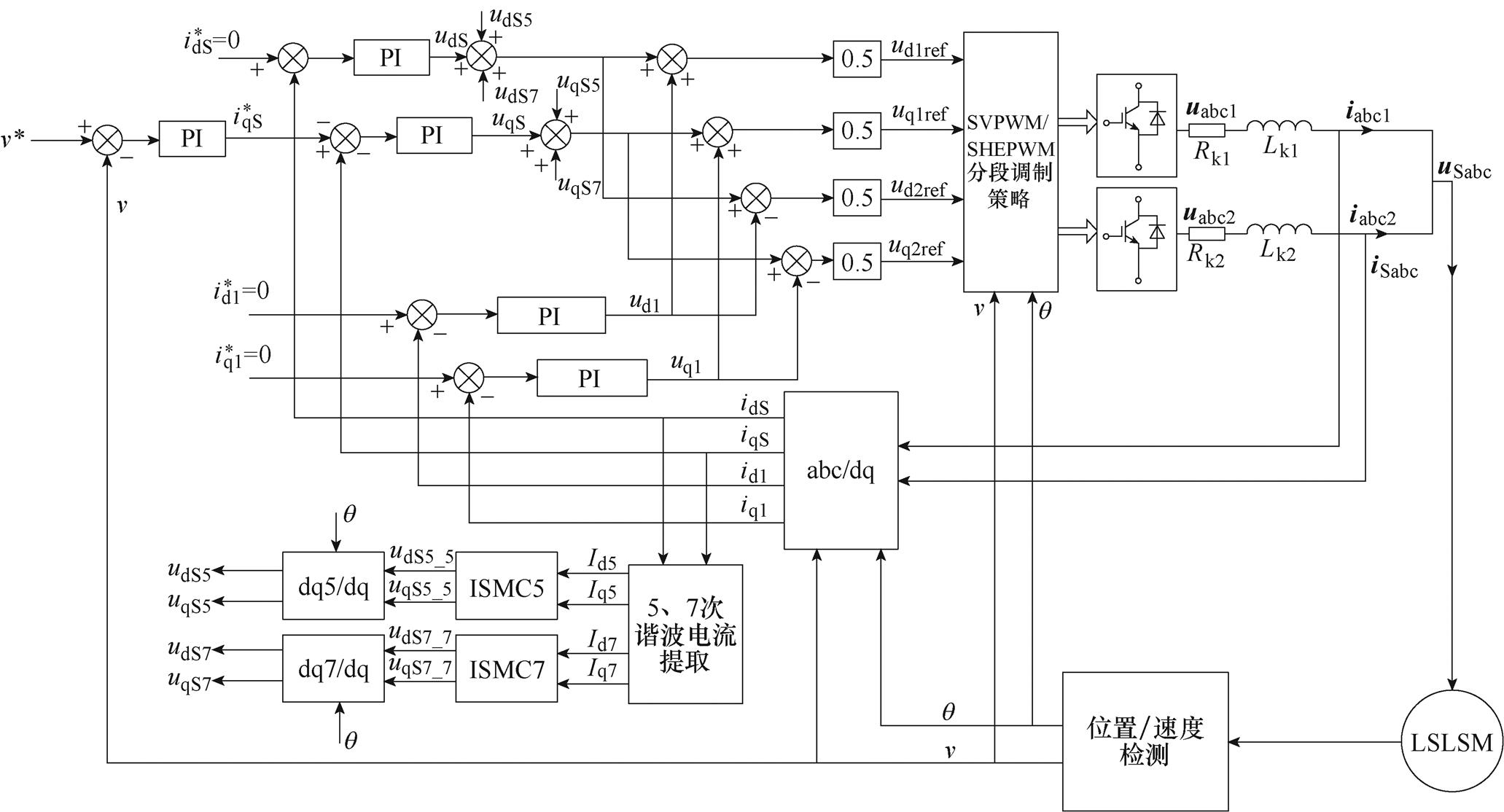
图4 基于积分滑模的5、7次谐波电流抑制的速度电流闭环电机控制框图
Fig.4 Control block diagram of speed current closed-loop motor with fifth and seventh harmonic current suppression based on integral sliding mode
为了验证本文所提出谐波电流抑制策略的有效性,在基于RT-Lab的高速磁悬浮牵引半实物系统上进行了硬件在环实验,实验平台如图5所示。

图5 高速磁悬浮牵引硬件在环平台
Fig.5 High-speed maglev traction HIL platform
图5中,CCU(变流器控制单元)和MCU(电机控制单元)共同组成了牵引控制系统,通过光电转换机箱组成的信号调理单元实现对RT-Lab测试系统中的变流器以及直线电机的控制,同时与CPU5600实现数据传送。
RT-Lab测试系统又包括四台高功率变流器的FPGA仿真机。其中两台FPGA同时作为直线同步
电机的仿真子系统。FPGA仿真机之间通过光纤连接,FPGA与Dolphin机箱通过数据线连接。PC上位机与CPU5600通过网线连接,实现了系统模型搭建、数据接收与功能调试。实验中,长定子直线电机参数见表1。
表1 长定子直线电机参数
Tab.1 Parameters of LSLSM

参 数数 值 定子电阻Rs/W0.436 176 d轴电感Ld/mH3.915 3 q轴电感Lq/mH3.465 3 定子绕组与励磁绕组互感Msm/mH165 定子极距t/m0.258 列车总质量M/t306.9 控制周期fs/kHz7.2
对基于坐标变换与PI控制的传统谐波电流抑制策略与本文提出的控制策略分别进行硬件在环实验。高速磁悬浮牵引控制系统采用id=0的转子磁场定向控制策略。实验中的定子段沿轨道分段排布并采用两步法的换步方式,即当列车进行轨道一侧的定子段换步时,该侧定子电流先减小为零,换步完成后定子电流再恢复。
按照当前对高速磁悬浮列车的运行要求,硬件在环实验目标速度为600km/h,实验所用的速度参考曲线如图6所示,双端供电模式下的A相定子电流波形如图7所示。
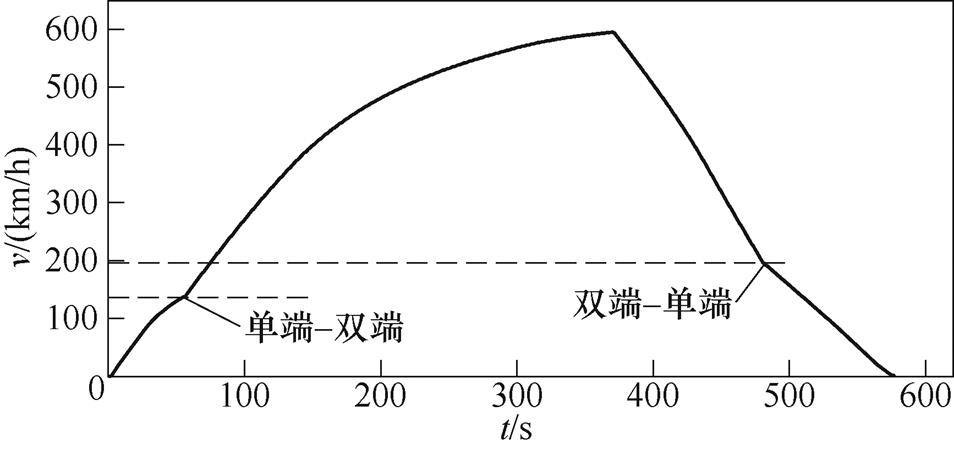
图6 高速磁悬浮列车速度曲线
Fig.6 The speed curve of high-speed maglev
加速过程中,磁悬浮列车在时速135km/h时由单端供电切换为双端供电模式;在减速过程中,则是在时速200km/h时由双端供电切换为单端供电模式。速度与电流频率的换算关系为
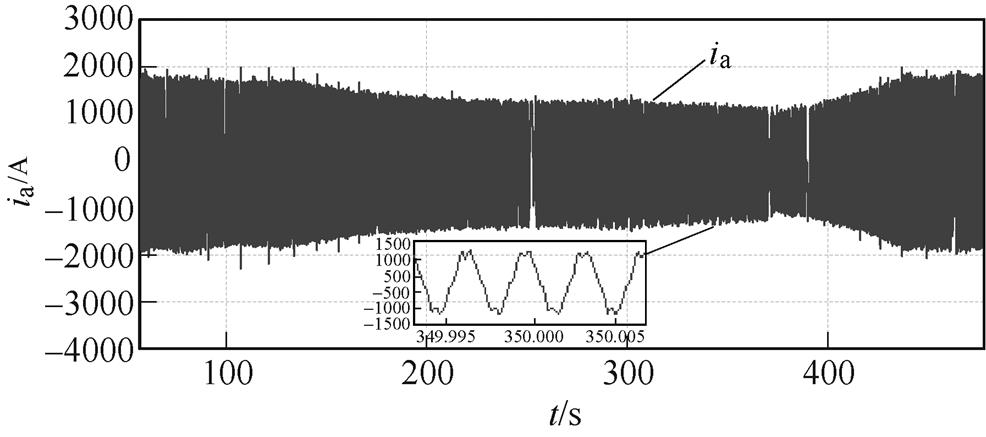
图7 双端供电模式下电机电流波形
Fig.7 Motor current curve in double feed mode
 (26)
(26)
双端供电模式下不同速度阶段下的A相电机电流波形及其谐波频谱如图8所示,图8中从左至右三列分别为未采用谐波抑制策略、采用基于坐标变换和PI控制器的传统谐波电流抑制策略和采用积分滑模和坐标变换的谐波电流抑制策略时的A相电流波形及其频谱图,两种控制策略均取参数调试效果较好的结果。从实验结果可知,未采用谐波抑制算法时,随着列车时速的上升,双端供电模式下的相电流波形逐渐产生畸变,电流正弦度逐渐变差。通过傅里叶变换进行频谱分析可知主要谐波为5、7次谐波且含量随速度上升而逐渐增高。以时速600km/h时的A相电流波形为例,5、7次谐波含量分别达到了基波的11.49%和6.42%。传统策略对5、7次谐波具有一定的抑制作用,但是在高速阶段,抑制效果仍然不显著。以600km/h时的A相电流为例,5、7次谐波含量分别下降至基波的4.55%和2.46%。采用本文提出的谐波抑制策略时,仍然以600km/h时的A相电流为例,5、7次谐波含量分别下降至基波的1.13%和0.73%,证明了所提出策略的优越性。
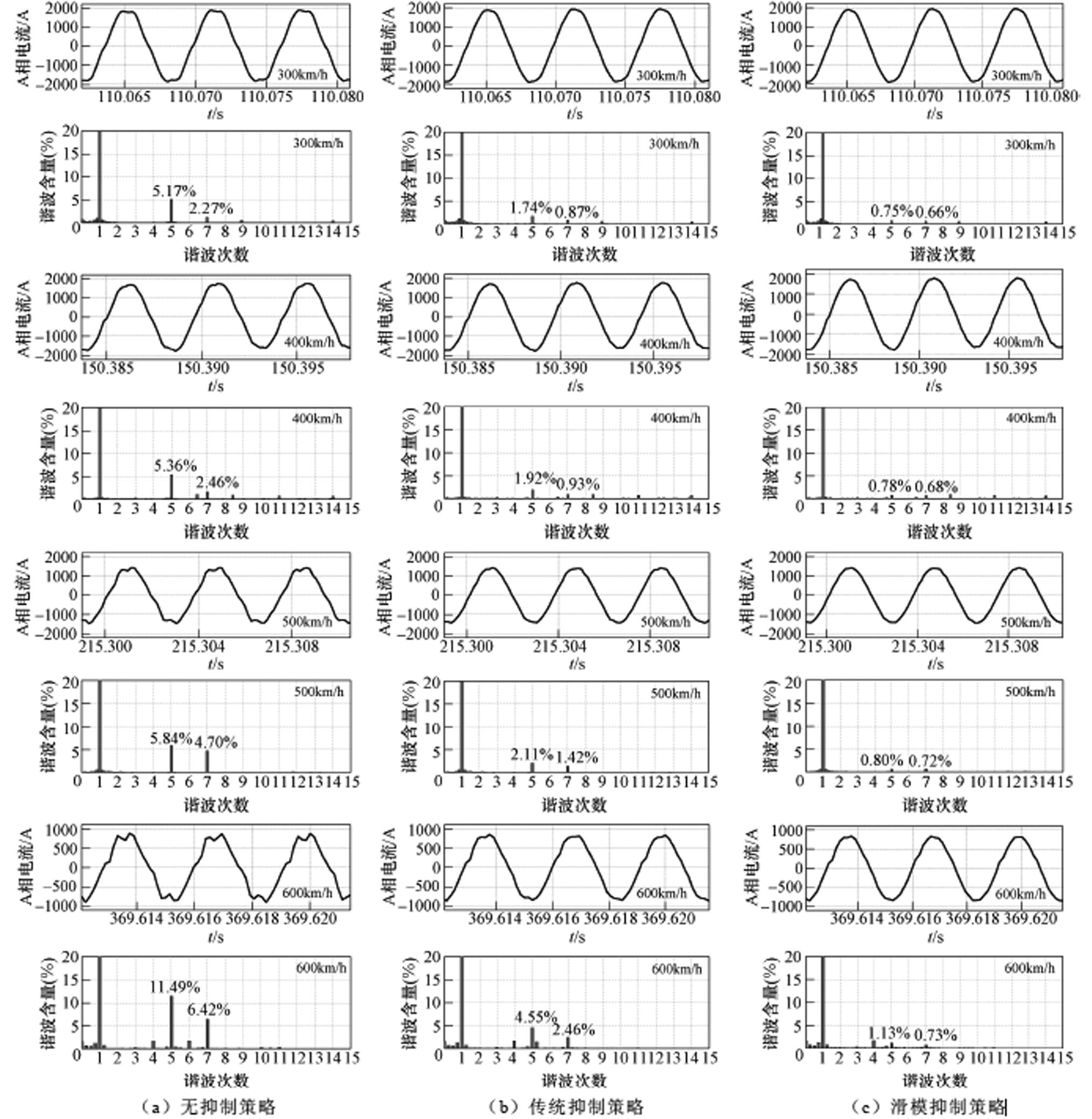
图8 双端供电模式下电机A相电流波形、频谱图
Fig.8 Motor phase A current waveforms and frequency spectrum in double feed mode
上述三种模式下,双端供电时的基频旋转坐标系下的电机dq轴电流波形如图9所示。
采用id=0的转子磁场定向控制策略的高速磁悬浮列车牵引力如式(27)所示,可知当d轴谐波电流得到抑制时,牵引力Fx将与iq近似为线性关系[23]。
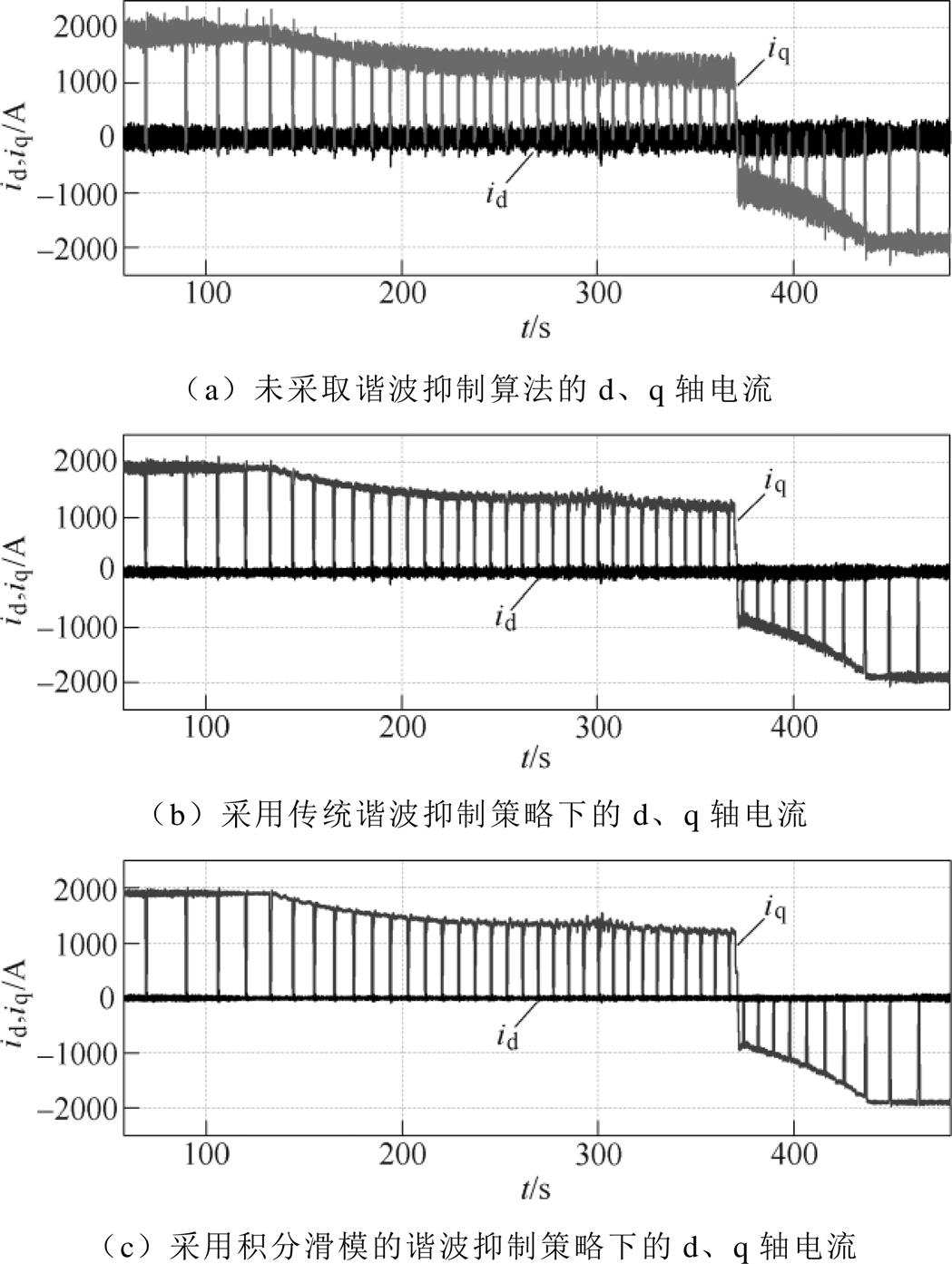
图9 双端供电时基频旋转坐标系下的dq轴电流
Fig.9 The dq axis current in the fundamental frequency rotating coordinate system in the double feed mode
 (27)
(27)
由图9可知,由于所提出的谐波抑制算法取得更好的抑制效果,dq轴电流的高频波动也明显改善,这也将有效降低列车牵引力波动,减少电机损耗,改善牵引控制性能。
本文针对高速磁悬浮列车运行在双端供电模式时,长定子直线电机相电流中存在大量谐波的问题,提出了基于积分滑模的谐波抑制策略。通过坐标变换与低通滤波提取出含量较高的5、7次谐波电流,在控制系统中增加了谐波电流环对谐波进行抑制。推导了谐波电压数学模型,设计了积分滑模谐波控制器。本文创新性地将滑模控制策略应用到电机谐波电流的抑制之中,硬件在环实验证明了本文所提出谐波抑制策略比传统谐波抑制策略更有效,从而提高了电机相电流的正弦度,降低了牵引力波动和损耗。
参考文献
[1] 吴祥明. 磁浮列车[M]. 上海: 上海科学技术出版社, 2003.
[2] 刘金鑫, 葛琼璇, 王晓新, 等. 高速磁浮牵引控制系统半实物实验研究[J]. 电工技术学报, 2015, 30(14): 497-503.
Liu Jinxin, Ge Qiongxuan, Wang Xiaoxin, et al. Hardware-in-loop research of traction-system for high-speed maglev[J]. Transactions of China Electro- technical Society, 2015, 30(14): 497-503.
[3] 张波, 葛琼璇, 王晓新, 等. 三电平ANPC变流器中点电位控制策略研究[J]. 电工电能新技术, 2016, 35(8): 1-7.
Zhang Bo, Ge Qiongxuan, Wang Xiaoxin, et al. Research on neutral point potential balancing for three- level ANPC converter[J]. Advanced Technology of Electrical Engineering and Energy, 2016, 35(8): 1-7.
[4] 孙雨萍, 李光友. 长定子直线同步电动机抑制推力脉动的新方法及机理分析[J]. 电工技术学报, 2006, 21(8): 80-82, 89.
Sun Yuping, Li Guangyou. Method and mechanism analysis of retraining thrust pulsation for long stator linear synchromotors[J]. Transactions of China Elec- trotechnical Society, 2006, 21(8): 80-82, 89.
[5] 张晓明, 蔡涛, 胡宏晟, 等. 计及谐波和死区影响的IPT系统时域建模与软开关特性分析[J]. 电力系统自动化, 2019, 43(17): 140-146.
Zhang Xiaoming, Cai Tao, Hu Hongsheng, et al. Time-domain modeling and soft-switching characteristic analysis of inductive power transfer system con- sidering influence of harmonics and dead time[J]. Automation of Electric Power Systems, 2019, 43(17): 140-146.
[6] 陈杰, 章新颖, 闫震宇, 等. 基于虚拟阻抗的逆变器死区补偿及谐波电流抑制分析[J]. 电工技术学报, 2021, 36(8): 1671-1680.
Chen Jie, Zhang Xinying, Yan Zhenyu, et al. Dead- time effect and background grid-voltage harmonic suppression methods for inverters with virtual impedance control[J]. Transactions of China Elec- trotechnical Society, 2021, 36(8): 1671-1680.
[7] Qi Yang, Fang Jingyang, Liu Jiazhe, et al. Coor- dinated control for harmonic mitigation of parallel voltage-source inverters[J]. CES Transactions on Elec- trical Machines and Systems, 2018, 2(3): 276-283.
[8] 李帅, 孙立志, 刘兴亚, 等. 永磁同步电机电流谐波抑制策略[J]. 电工技术学报, 2019, 34(增刊1): 87-96.
Li Shuai, Sun Lizhi, Liu Xingya, et al. Current harmonics suppression strategies of permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 87-96.
[9] 武永燎, 李红, 宋欣达, 等. 基于改进型重复控制器的永磁同步电机电流谐波抑制方法研究[J]. 电工技术学报, 2019, 34(11): 2277-2286.
Wu Yongliao, Li Hong, Song Xinda, et al. Suppression of harmonic current in permanent magnet synchronous motors using improved repetitive controller[J]. Transactions of China Electrotechnical Society, 2019, 34(11): 2277-2286.
[10] 张剑, 温旭辉, 李文善, 等. 基于谐波观测器的永磁同步电机谐波电流抑制策略研究[J]. 中国电机工程学报, 2020, 40(10): 3336-3349.
Zhang Jian, Wen Xuhui, Li Wenshan, et al. Research on harmonic current suppression strategies of permanent magnet synchronous motor systems based on harmonic observers[J]. Proceedings of the CSEE, 2020, 40(10): 3336-3349.
[11] 魏艺涵, 罗响, 朱莉, 等. 基于比例谐振控制器的高凸极率永磁同步电机电流谐波抑制策略研究[J]. 中国电机工程学报, 2021, 41(7): 2526-2537.
Wei Yihan, Luo Xiang, Zhu Li, et al. Research on current harmonic suppression strategy of high saliency ratio permanent magnet synchronous motor based on proportional resonance controller[J]. Pro- ceedings of the CSEE, 2021, 41(7): 2526-2537.
[12] 夏薇, 王凯, 张建亚, 等. 基于谐振控制器的谐波削极型永磁同步电机转矩脉动抑制策略[J]. 中国电机工程学报, 2019, 39(18): 5499-5508, 5598.
Xia Wei, Wang Kai, Zhang Jianya, et al. Torque ripple suppression of permanent magnet synchronous motor with harmonic shaped rotors based on resonance controllers[J]. Proceedings of the CSEE, 2019, 39(18): 5499-5508, 5598.
[13] Liu Gang, Chen Baodong, Wang Kun, et al. Selective Current harmonic suppression for high-speed PMSM based on high-precision harmonic detection method[J]. IEEE Transactions on Industrial Informatics, 2019, 15(6): 3457-3468.
[14] 刘刚, 孙庆文, 肖烨然. 永磁同步电机用坐标变换的电流谐波抑制方法[J]. 电机与控制学报, 2015, 19(5): 30-36.
Liu Gang, Sun Qingwen, Xiao Yeran. Permanent magnet synchronous motor current harmonics suppression based on coordinate transformation[J]. Electric Machines and Control, 2015, 19(5): 30-36.
[15] Xu Yongxiang, Zheng Boyuan, Wang Guan, et al. Current harmonic suppression in dual three-phase permanent magnet synchronous machine with extended state observer[J]. IEEE Transactions on Power Electronics, 2020, 35(11): 12166-12180.
[16] 金鸿雁, 赵希梅, 原浩. 永磁直线同步电机动态边界层全局互补滑模控制[J]. 电工技术学报, 2020, 35(9): 1945-1951.
Jin Hongyan, Zhao Ximei, Yuan Hao. Dynamic boundary layer global complementary sliding mode control for permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2020, 35(9): 1945-1951.
[17] 陈闯, 王勃, 于泳, 等. 基于改进指数趋近律的感应电机滑模转速观测器研究[J]. 电工技术学报, 2020, 35(增刊1): 155-163.
Chen Chuang, Wang Bo, Yu Yong, et al. An improved exponential reaching law based-sliding mode observer for speed-sensorless induction motor drives[J]. Transactions of China Electrotechnical Society, 2020, 35(S1): 155-163.
[18] Wang Yaoqiang, Feng Yutao, Zhang Xiaoguang, et al. A new reaching law for antidisturbance sliding-mode control of PMSM speed regulation system[J]. IEEE Transactions on Power Electronics, 2020, 35(4): 4117-4126.
[19] 王勃, 王天擎, 于泳, 等. 感应电机电流环非线性积分滑模控制策略[J]. 电工技术学报, 2021, 36(10): 2039-2048.
Wang Bo, Wang Tianqing, Yu Yong, et al. Nonlinear integral sliding mode control strategy for current loop of induction motor drives[J]. Transactions of China Electrotechnical Society, 2021, 36(10): 2039-2048.
[20] 原浩, 赵希梅. 基于积分滑模的永磁直线同步电动机直接推力控制[J]. 电工技术学报, 2019, 34(3): 483-488.
Yuan Hao, Zhao Ximei. Direct thrust force control based on integral sliding mode for permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2019, 34(3): 483-488.
[21] 朱进权, 葛琼璇, 孙鹏琨, 等. 基于自抗扰的高速磁浮列车牵引控制策略[J]. 电工技术学报, 2020, 35(5): 1065-1074.
Zhu Jinquan, Ge Qiongxuan, Sun Pengkun, et al. Traction-system research of high-speed maglev based on active disturbance rejection control[J]. Transa- ctions of China Electrotechnical Society, 2020, 35(5): 1065-1074.
[22] 高为炳. 变结构控制的理论及设计方法[M]. 北京: 科学出版社, 1996.
[23] 王娟. 磁悬浮列车用长定子直线同步电机特性研究与故障分析[D]. 北京: 中国科学院电工研究所, 2004.
Harmonic Current Suppression Strategy for High-Speed Maglev Train Based on Integral Sliding Mode
Abstract The high-speed maglev train is driven by a long-stator linear synchronous motor. When the train is running, there are a large number of harmonics in the motor stator phase current, which will affect the train's traction control performance and cause traction fluctuations. This paper deduces the harmonic voltage mathematical model of the long-stator linear synchronous motor in the double feed mode for the 5th and 7th harmonic currents with higher harmonic content, and extracts the harmonic currents through coordinate transformation and low-pass filtering. A harmonic controller based on integral sliding mode is designed, and a harmonic current loop is added to the control system, thereby suppressing the 5th and 7th harmonic components in the stator current of the motor. Finally, hardware-in-the-loop experiments are carried out on the control strategy proposed in this paper and the traditional harmonic suppression strategy. Comparing the experimental results shows that the proposed strategy has a stronger harmonic suppression capability.
Keywords:High-speed maglev, double feed mode, harmonic suppression, coordinate trans- formation, harmonic voltage model, integral sliding mode control
中图分类号:TM359.4
DOI: 10.19595/j.cnki.1000-6753.tces.211494
国家重点研发计划高速磁浮交通系统关键技术研究课题资助项目(2016YFB1200602-19)。
收稿日期 2021-09-18
改稿日期 2022-01-05
E-mail: caoxueqian@mail.iee.ac.cn
葛琼璇 女,1967年生,研究员,博士生导师,研究方向为高压大功率变流器控制技术、高性能电机牵引控制技术。
E-mail: gqx@mail.iee.ac.cn(通信作者)
(编辑 郭丽军)