 时刻的系统状态变量预测 值[9-10]。系统工作状态的好坏是基于精准的数学模型决定的,然而电机参数在很多时候无法准确测算,并且由于外界环境(如温度、磁场变化等)的影响,电机参数也会发生变化,这样的系统状态变量预测值必然与实际值不符,从而对系统的工作状态造成错误判断,影响控制系统的稳定性[11-12]。因此,预测控制目前的主要缺陷之一是由于参数不稳定造成的预测误差。
时刻的系统状态变量预测 值[9-10]。系统工作状态的好坏是基于精准的数学模型决定的,然而电机参数在很多时候无法准确测算,并且由于外界环境(如温度、磁场变化等)的影响,电机参数也会发生变化,这样的系统状态变量预测值必然与实际值不符,从而对系统的工作状态造成错误判断,影响控制系统的稳定性[11-12]。因此,预测控制目前的主要缺陷之一是由于参数不稳定造成的预测误差。摘要 针对永磁同步电机有限集模型预测控制过程中对电机参数鲁棒性较差的问题,提出了一种具有预测误差补偿的鲁棒型模型预测控制方法。分别考虑了转矩与定子磁链两个回路,采用延迟补偿的方式,将k时刻的预测值与实际值之间的误差值作为补偿因素反馈到k+1时刻的预测模型中。为了保证预测误差补偿的准确性,重点研究了在一个控制周期内得到所有电压矢量对应的转矩与定子磁链误差的计算方法。仿真和实验结果表明,在电机参数失配情况下,通过该补偿方法能够获得可靠的转矩与定子磁链预测值,提升了电机参数在模型预测控制中的鲁棒性。
关键词:永磁同步电机 转矩与定子磁链预测控制 预测误差补偿 参数鲁棒性
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其结构简单、体积较小、效率高,在新能源汽车、轨道交通、风电等领域得到广泛应用[1-3]。不同于传统的异步不对称调制和同步最优脉宽调制,永磁同步电机的模型预测控制方式具有动态性能好、计算简单等优点,近年来已成为研究热 点[4-5]。其中,有限集模型预测控制(Finite Control Set Model Predictive Control,FCS-MPC)利用功率变换器的离散开关特性,对不同电压矢量下的开关状态对应的系统状态变量(如电流、转矩、定子磁链等)进行预测[6-7]。随后将预测结果代入预先设计好的价值函数当中,评估并选择最优的电压矢量,获取开关状态[8]。
FCS-MPC在预测过程中,需要使用离散状态下的电机模型来计算时刻的系统状态变量预测 值[9-10]。系统工作状态的好坏是基于精准的数学模型决定的,然而电机参数在很多时候无法准确测算,并且由于外界环境(如温度、磁场变化等)的影响,电机参数也会发生变化,这样的系统状态变量预测值必然与实际值不符,从而对系统的工作状态造成错误判断,影响控制系统的稳定性[11-12]。因此,预测控制目前的主要缺陷之一是由于参数不稳定造成的预测误差。
为了解决FCS-MPC中存在的参数变化问题,国内外学者首先研究了参数变化对FCS-MPC性能的影响。文献[13]对FCS-MPC过程中参数的敏感性提出了分析。结果表明,相对于电机的电阻,电机的电感和永磁体磁链参数的变化在控制过程中会产生更大的影响。文献[14]证明模型预测转矩控制(model Predictive Torque Control, PTC)和模型预测电流控制(model Predictive Current Control, PCC)都具有良好的动态和稳态性能,其中PCC对于电阻参数的变化具有更好的鲁棒性,而PTC对于电感和永磁体磁链的参数变化具有更好的鲁棒性。在此基础上,学者针对参数变化提出了解决方案。第一类是提出了无模型预测,即不使用电机参数完成预测控制,但是该方法对于硬件的要求较高[15-17];第二类是对FCS-MPC中参数采用在线参数辨识和添加观测器(如龙贝格观测器、模型参考自适应观测器和扩展状态观测器等)的方法,然而由于参数调节和收敛性的问题,其算法增加了控制的复杂性,系统的动态性能受到影响[18-20]。
在PTC中,当电机的参数存在误差时,会引起转矩与定子磁链的预测误差,即参数的预测值与实际值的差值。针对上述提到的方案以及存在的问题,文献[21]在模型预测中对参数变化引起的转矩与定子磁链的变化率进行研究,通过计算该变化率与控制周期的乘积得出误差值,在时刻的预测控制中进行补偿,并且设计了预测误差补偿器。但是,相邻两个时刻产生的转矩与定子磁链误差是工作在不同的电压矢量条件下,在时刻未知电压矢量产生的误差与 时刻已知的电压矢量对应的误差并不相关。因此,将时刻计算得到的误差值运用在时刻,进行所有可能的电压矢量的补偿不够 合理。
时刻已知的电压矢量对应的误差并不相关。因此,将时刻计算得到的误差值运用在时刻,进行所有可能的电压矢量的补偿不够 合理。
文献[22]在文献[21]的基础上,在一个控制周期内分别设计了基于N*三相PMSM的转矩与定子磁链预测误差补偿方法,通过将预测的转矩与定子磁链值和实际值做差处理,在每一个控制周期内能够得到单个扇区对应电压矢量的转矩与定子磁链误差,在此基础上对转矩与定子磁链分别设计了鲁棒型预测控制器,在时刻,降低了转矩与定子磁链的预测误差,但是仍然没有解决文献[21]中存在的误差补偿不准确的问题,从而使得转矩与定子磁链预测不够可靠,影响控制系统性能。
本文针对以上方案存在的问题,提出了一种改进型的转矩与定子磁链模型预测控制方法。在该方法中,将参数变化时存在的转矩与定子磁链预测误差和所有电压矢量的相关性进行分析。提出了在一个控制周期内,同时得到所有电压矢量对应的转矩与定子磁链误差的计算方法。利用每个电压矢量和转矩与定子磁链之间的数学关系,在时刻计算所有扇区电压矢量对应的误差值,最终所有电压矢量产生的误差值能够实现更新,在时刻的预测控制模型中准确补偿。
PMSM在同步旋转坐标系下的电压平衡方程可表示为
 (1)
(1)
式中,Ud、Uq分别为d、q轴定子电压;yd、yq分别为d、q轴定子磁链;Id、Iq分别为d、q轴定子电流;Rs为定子电阻;we为电角速度。
本文采用传统的电压型逆变器驱动三相PMSM,其驱动系统结构框图及逆变器的开关状态如图1所示。
图1中, (D=A, B, C;F=up, dowm)分别表示逆变器3个桥臂的开关状态。由绝缘双极性晶体管组成的逆变桥,通过上下桥臂的开合,具有八种开关状态组合。可以得到6个幅值相同,空间位置和电压矢量固定的开关状态以及两个零矢量。分别表示为
(D=A, B, C;F=up, dowm)分别表示逆变器3个桥臂的开关状态。由绝缘双极性晶体管组成的逆变桥,通过上下桥臂的开合,具有八种开关状态组合。可以得到6个幅值相同,空间位置和电压矢量固定的开关状态以及两个零矢量。分别表示为
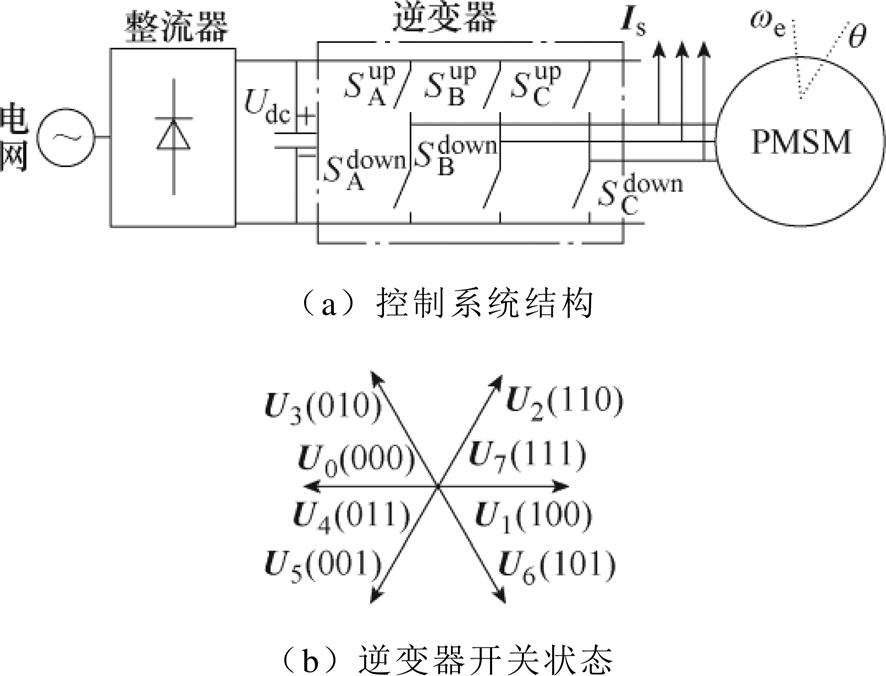
图1 驱动系统结构框图及逆变器的开关状态
Fig.1 Block diagram of drive system structure and switching state of inverter
 (2)
(2)
式中, 为任一时刻作用的电压空间矢量的序号,=0,1,…,7;
为任一时刻作用的电压空间矢量的序号,=0,1,…,7; 为8个电压矢量;
为8个电压矢量; 为直流母线电压。
为直流母线电压。
此外,三相永磁同步电机的电磁转矩矢量方程为
 (3)
(3)
式中,p为电机极对数;ys、Is分别为定子磁链和定子电流。
传统PTC原理框图如图2所示,由转速外环产生的参考转矩值 ,被送入到价值函数当中。参考磁链
,被送入到价值函数当中。参考磁链 根据最大转矩电流比(Maximum Torque Per Ampere, MTPA)控制计算得出。
根据最大转矩电流比(Maximum Torque Per Ampere, MTPA)控制计算得出。
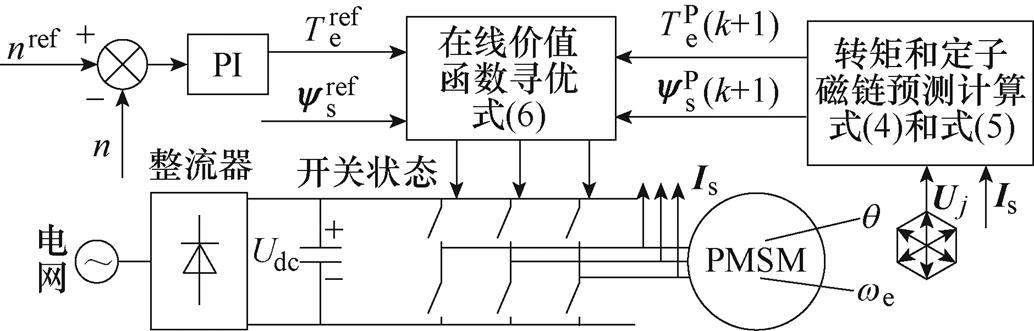
图2 传统PTC原理框图
Fig.2 Block diagram of traditional PTC
根据采集的三相电流,经Clarke和Park变换得出时刻的同步旋转两相电流,再采用一阶前向欧拉法则,得出在离散化条件下,在时刻含有电机参数的电流数学模型可表示为
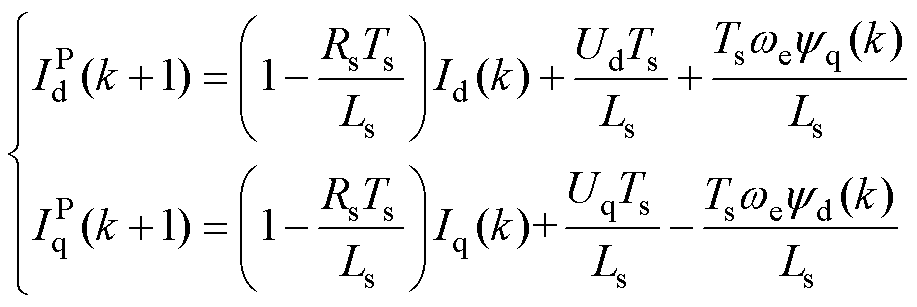 (4)
(4)
式中, 、
、 分别为时刻的d、q轴预测电流;
分别为时刻的d、q轴预测电流; 、
、 分别为时刻的d、q轴电流;
分别为时刻的d、q轴电流; 和
和 分别为时刻的d、q轴定子磁链;
分别为时刻的d、q轴定子磁链; 为交直轴定子电感;
为交直轴定子电感; 为控制周期。
为控制周期。
则在时刻的转矩与定子磁链预测数学模型表示为
 (5)
(5)
式中, 为时刻的预测定子磁链;
为时刻的预测定子磁链; 为时刻的预测转矩;
为时刻的预测转矩; 为时刻的预测电流,=
为时刻的预测电流,= 。
。
通过式(4)和式(5),可以看出时刻的转矩与定子磁链预测模型对电机自身的参数有很强的依赖性。
在每一个控制周期内,通过遍历6个有效电压矢量和两个电压零矢量预测时刻的转矩与定子磁链值,代入到价值函数当中,选取使价值函数最小的电压矢量作为最优电压矢量,通过两电平逆变器输出作用到电机上。本文选用的价值函数为
 (6)
(6)
式中,为电机的参考转矩;为电机的参考定子磁链; 为转矩和定子磁链数量级差引起的权重系数。
为转矩和定子磁链数量级差引起的权重系数。
在引言中已经提到,由于电机参数受外界环境影响发生改变从而产生预测误差。在考虑转矩与定子磁链误差补偿的情况下,可以将预测值写为
 (7)
(7)
式中, 和
和 为时刻经误差补偿后得到的预测转矩与定子磁链值;
为时刻经误差补偿后得到的预测转矩与定子磁链值; 和
和 为时刻根据式(5)预测得出的在各电压矢量作用下的转矩与定子磁链预测值;
为时刻根据式(5)预测得出的在各电压矢量作用下的转矩与定子磁链预测值; 、
、 为时刻各电压矢量作用下转矩与定子磁链的预测误差值。
为时刻各电压矢量作用下转矩与定子磁链的预测误差值。
在文献[21-22]中,预测误差值为实际观测值和模型预测值的差。如图3所示为传统的转矩与定子磁链误差方法示意图,图中, 和
和 分别为时刻转矩与定子磁链的实际值,
分别为时刻转矩与定子磁链的实际值, 和
和 分别为时刻转矩与定子磁链的预测值,两者之间产生的误差为和。图中以电压矢量
分别为时刻转矩与定子磁链的预测值,两者之间产生的误差为和。图中以电压矢量 为例,传统的补偿方式是在时刻,根据式(7),将时刻的转矩与定子磁链的预测误差值补偿给时刻的预测模型中。然而时刻的预测误差是在特定的电压矢量下得到的,其他未作用的电压矢量对应的预测误差值无法实时更新,且价值函数在和时刻选择的最优电压矢量未必一致,所以这种补偿方式并不准确。
为例,传统的补偿方式是在时刻,根据式(7),将时刻的转矩与定子磁链的预测误差值补偿给时刻的预测模型中。然而时刻的预测误差是在特定的电压矢量下得到的,其他未作用的电压矢量对应的预测误差值无法实时更新,且价值函数在和时刻选择的最优电压矢量未必一致,所以这种补偿方式并不准确。
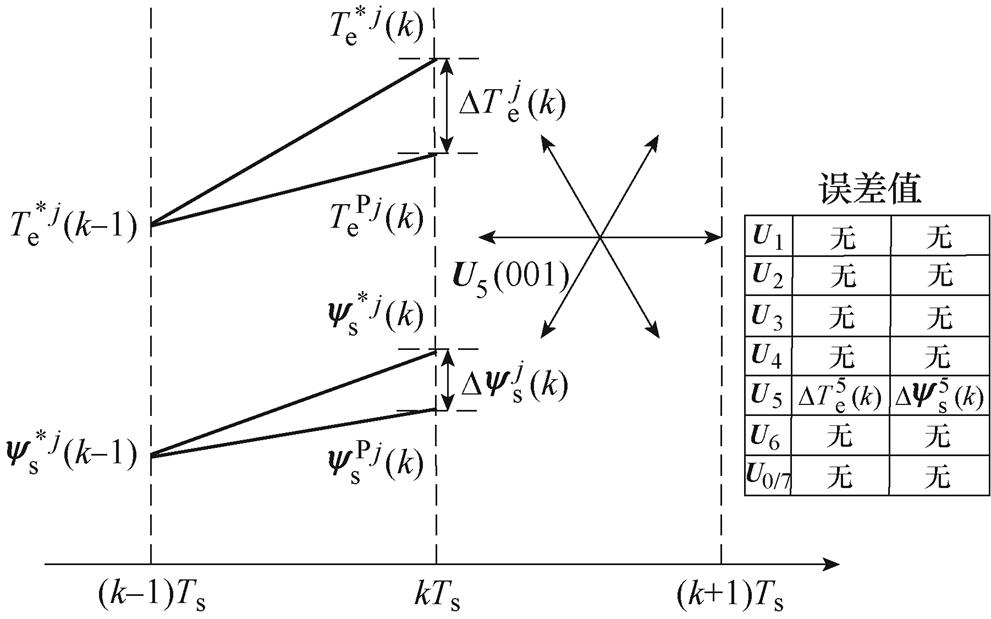
图3 传统的转矩与定子磁链误差方法示意图
Fig.3 Diagram of traditional torque and stator flux update method
由2.1节分析可知,采用传统的PTC方法计算的预测误差不准确,为了获得可靠的预测误差,提升参数鲁棒性,本文在一个控制周期内对每个电压矢量对应的转矩与定子磁链预测误差分别计算并补偿,下面依次对改进的定子磁链和转矩预测误差计算方法及预测误差补偿方法的实现展开分析。
文献[13]已指出,相对于电机的电阻,电感和永磁体磁链参数的变化在控制过程中会产生更大的影响。因此,本节首先分析电感和永磁体磁链参数变化时所有电压矢量对应定子磁链误差值的计算方法。首先,引入 和
和 ,其中
,其中 和
和 为实际参数值,
为实际参数值, 和为额定参数值,
和为额定参数值, 和
和 为外界环境变化引起的参数不确定分量。在考虑不确定分量的情况下,根据式(1),PMSM在同步旋转坐标系上的电流方程可表示为
为外界环境变化引起的参数不确定分量。在考虑不确定分量的情况下,根据式(1),PMSM在同步旋转坐标系上的电流方程可表示为
 (8)
(8)
其中
式中, 、
、 分别为时刻的d、q轴的实际定子电流;
分别为时刻的d、q轴的实际定子电流; 、
、 分别为时刻作用电压矢量的d、q轴分量。
分别为时刻作用电压矢量的d、q轴分量。
基于式(8),在参数变化时下,可以得到永磁同步电机定子磁链的方程组为
 (9)
(9)
其中
 (10)
(10)
式中, 、
、 分别为时刻实际的d、q轴定子磁链值。
分别为时刻实际的d、q轴定子磁链值。
在离散化条件下,在 时刻利用式(9)预测时刻准确的定子磁链方程,可以表示为
时刻利用式(9)预测时刻准确的定子磁链方程,可以表示为
 (11)
(11)
其中
式中, 和
和 分别为时刻的电压矢量和定子磁链。
分别为时刻的电压矢量和定子磁链。
根据式(1),在离散条件下得到时刻的定子磁链计算公式。此时预测模型中按照额定参数预测的定子磁链计算为
 (12)
(12)
式中,为时刻的预测定子磁链。
由式(11)和式(12)两式相减,在时刻定子磁链的预测误差表示为
 (13)
(13)
其中
式中,为在时刻的定子磁链预测误差; 、
、 分别为时刻的d、q轴预测磁链误差。
分别为时刻的d、q轴预测磁链误差。
由于PMSM达到稳定状态时,电机的机械速度在较短时间内是恒定的。根据式(1),在时刻,静态电压的稳态方程为
 (14)
(14)
式中, 、
、 分别为时刻d、q轴上的静态电压;、分别为时刻d、q轴上的静态电流。
分别为时刻d、q轴上的静态电压;、分别为时刻d、q轴上的静态电流。
将式(14)代入到式(13)中可得
 (15)
(15)
其中
式中, 为电感的变化系数。
为电感的变化系数。
此时,在时刻可以得到和时刻的定子磁链误差的差值,根据式(15)可得
 (16)
(16)
其中
式中, 为时刻作用电压矢量的电流预测值与实际值的误差值;
为时刻作用电压矢量的电流预测值与实际值的误差值; 为时刻作用电压矢量的定子磁链误差值。
为时刻作用电压矢量的定子磁链误差值。
假设在时刻计算时将电流误差换成其他未作用电压矢量对应的电流误差 (
( =0,1,…,7,
=0,1,…,7, ),其中,为任一时刻未作用的电压空间矢量的序号。此时可以得到其他未作用电压矢量对应磁链误差的关系式为
),其中,为任一时刻未作用的电压空间矢量的序号。此时可以得到其他未作用电压矢量对应磁链误差的关系式为
 (17)
(17)
式中, 、分别为在时刻其他未作用电压矢量的定子磁链误差值和电流误差值。
、分别为在时刻其他未作用电压矢量的定子磁链误差值和电流误差值。
由于控制周期非常短,可以在连续的几个周期内假定电感的变化是不变的,即的值是不变的,根据式(16)和式(17)联立得
 (18)
(18)
因此,由式(18)可以得到所有未作用电压矢量在时刻的定子磁链预测值为
 (19)
(19)
式中,定子磁链误差值、和电流误差值分别通过和时刻的预测值和实际值做差计算得出。
考虑电感和永磁体磁链参数变化,PMSM在时刻的实际转矩为
 (20)
(20)
根据式(3)和式(20),在时刻的预测转矩与实际转矩误差可以表示为
 (21)
(21)
同理,在连续的几个控制周期内,假定转子磁链未发生变化,因此由式(21)可得
 (22)
(22)
式中, 为时刻的预测转矩与实际转矩的预测误差。
为时刻的预测转矩与实际转矩的预测误差。
根据式(8)和式(14)可得

 (23)
(23)
其中
式中, 为静态电压。
为静态电压。
由于控制周期非常短,静态电压在连续的几个周期内可视为恒定值。因此,由式(23)可得相邻周期内电流误差和电压矢量差值对应的关系式为
 (24)
(24)
如式(16)~式(19)所示,将时刻未作用的电压矢量代入式(24),则所有未作用电压矢量在时刻的电流预测误差值为

 (25)
(25)
式中,和分别为和时刻中电流预测值和实际值的误差; 和
和 分别为和时刻作用的电压矢量;
分别为和时刻作用的电压矢量; 为时刻所有未作用的电压矢量。
为时刻所有未作用的电压矢量。
此时,式(19)中在时刻所有未作用电压矢量对应的电流预测误差值被计算得出。
将式(24)中的q轴电流误差代入式(22)可得相邻周期转矩预测误差的差值为
 (26)
(26)
式中,、 分别为和时刻两个相邻周期的q轴电压。
分别为和时刻两个相邻周期的q轴电压。
类似地,假设在时刻将输入电压换成其他扇区的电压矢量,可以得到其他未作用电压矢量的转矩误差,即
 (27)
(27)
式中, 和
和 分别为在
分别为在 时刻未作用电压矢量对应产生的转矩误差和q轴电压。
时刻未作用电压矢量对应产生的转矩误差和q轴电压。
联立式(26)和式(27),可得
 (28)
(28)
则在时刻所有未作用电压矢量对应的转矩误差可表示为

 (29)
(29)
如图4所示为改进的转矩与定子磁链误差方法示意图。图中以工作在扇区 和
和 的连续两个周期为例,根据式(19)和式(29),在时刻可以得到每一个未作用电压矢量对应的转矩与定子磁链误差值,通过式(7)在
的连续两个周期为例,根据式(19)和式(29),在时刻可以得到每一个未作用电压矢量对应的转矩与定子磁链误差值,通过式(7)在 时刻的转矩与定子磁链预测模型中实现准确补偿。
时刻的转矩与定子磁链预测模型中实现准确补偿。
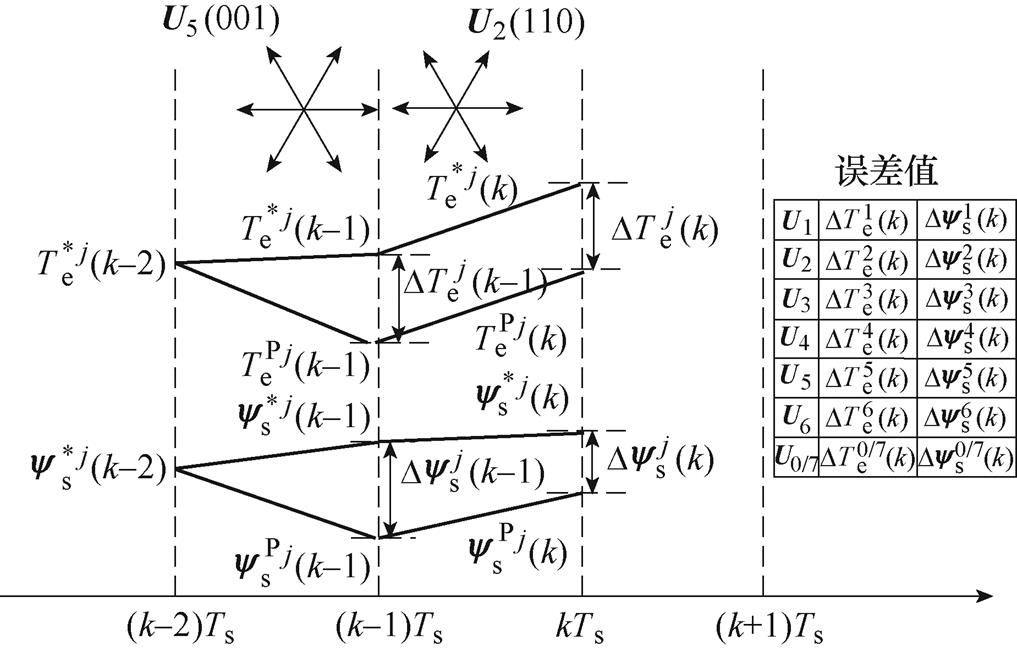
图4 改进的转矩与定子磁链误差方法示意图
Fig.4 Diagram of the improved torque and stator flux error method
利用这种方法弥补了在相邻周期时刻,工作在不同电压矢量下转矩与定子磁链误差不能准确补偿的不足,提升了系统的控制性能。
本文提出的转矩与定子磁链误差在一个控制周期内,被施加电压产生对应的误差可以通过预测值与实际观测值之间的差值得到。其他所有未作用扇区的电压矢量对应的转矩与定子磁链实时误差可以通过式(19)和式(29)在一个控制周期内直接计算得到,那么在下一个周期时刻就可以直接将误差值补偿到模型预测转矩当中。通过上述分析可以看出,改进PTC方法中所有的电压矢量的误差值在一个控制周期内均可得到。改进PTC的结构和流程分别如图5和图6所示。

图5 改进的具有误差补偿PTC结构
Fig.5 Structure diagram of improved PTC with error compensation
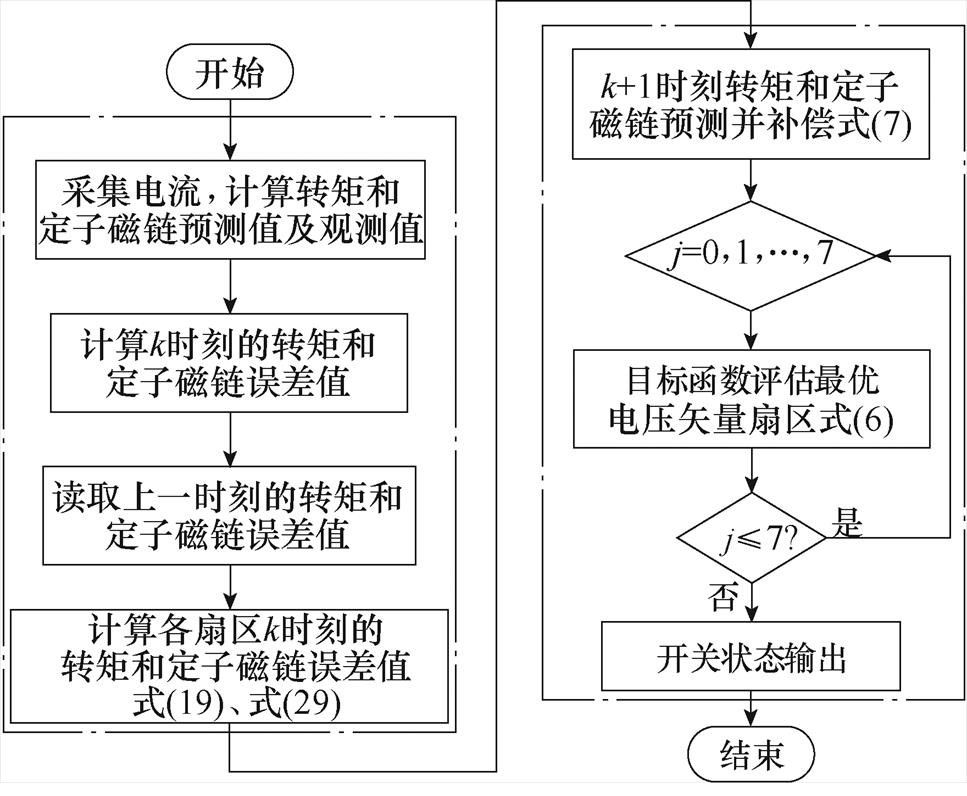
图6 改进的具有误差补偿PTC流程
Fig.6 Flow diagram of improved PTC with error compensation
定子磁链 的观测采用带补偿低通滤波器的电压型磁链观测估计,其结构框图如图7所示[23]。
的观测采用带补偿低通滤波器的电压型磁链观测估计,其结构框图如图7所示[23]。
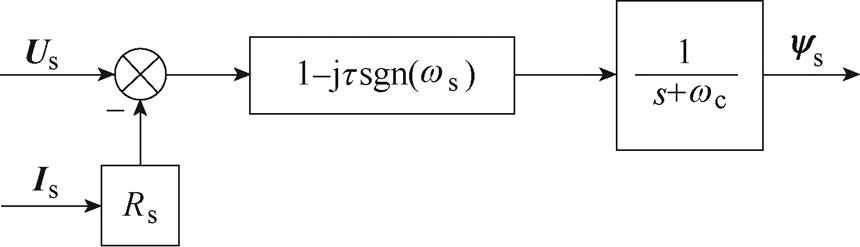
图7 定子磁链观测器结构框图
Fig.7 Block diagram of stator flux observer
图7中, 和
和 分别为低通滤波器的截止频率和同步频率,两者的表达式分别为
分别为低通滤波器的截止频率和同步频率,两者的表达式分别为
 (30)
(30)
式中, 的取值一般介于0.1~0.5之间,较大的
的取值一般介于0.1~0.5之间,较大的 值可以有效抑制直流漂移,但的相位偏移会变大。
值可以有效抑制直流漂移,但的相位偏移会变大。
本文在Matlab/Simulink仿真环境及研旭YXSPACE-SP2000实验平台上分别对改进PTC方法进行可行性和有效性验证,仿真和实验用的PMSM参数和权重系数见表1。仿真和实验结果将与传统PTC方法进行比较,采样频率设置为10kHz。
表1 永磁同步电机参数和权重系数
Tab.1 Parameters of tested PMSM and weighting factor
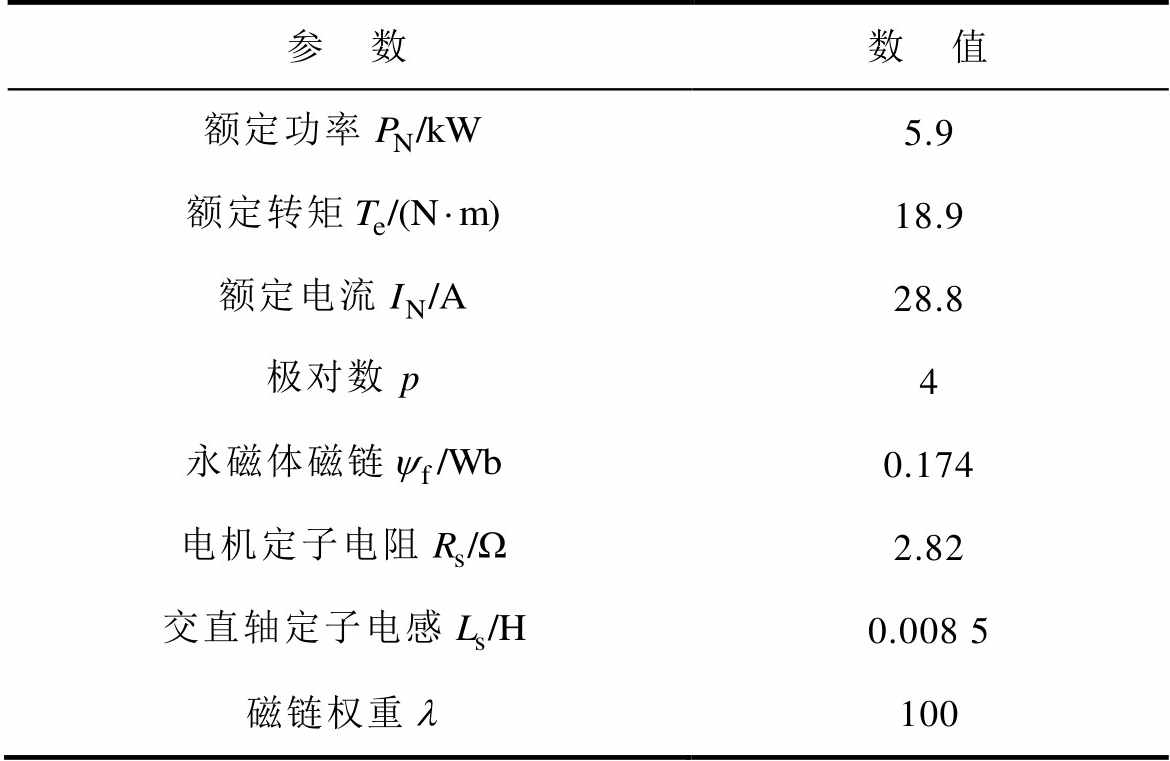
参 数数 值 额定功率5.9 额定转矩18.9 额定电流28.8 极对数4 永磁体磁链0.174 电机定子电阻2.82 交直轴定子电感0.008 5 磁链权重100
本节首先对传统PTC和改进PTC的误差计算方法在Matlab/Simulink仿真中进行对比和分析,重点验证改进PTC的可行性,即在单个周期内是否能够可靠更新所有电压矢量的转矩与定子磁链误差值。考虑温升、磁饱和的因素,电机电感参数值会变小;电机长时间运行导致退磁,永磁体磁链幅值也会降低。在仿真中,将控制策略中电机电感参数与永磁体磁链参数分别设置为额定值的1.2倍。电机的转速和负载分别设置为500 和8N·m。
和8N·m。
图8为传统PTC作用电压矢量对应的转矩与定子磁链误差变化曲线。从细节放大图中可以看出,转矩与定子磁链的预测误差值,在单个控制周期内只能计算一次,将这一电压扇区对应的误差值补偿给下一个控制周期未知作用电压扇区对应的预测过程中无法实现准确补偿。相邻作用电压矢量之间转矩与定子磁链最大误差可以达到1N·m和0.03Wb,通过式(6)及 值,价值函数最大误差可达4。如果在相邻的两个作用电压扇区内出现这种情况,那么会严重影响最优矢量的判断,导致错误的转矩与定子磁链误差补偿,从而使预测误差进一步增大,降低系统控制性能。
值,价值函数最大误差可达4。如果在相邻的两个作用电压扇区内出现这种情况,那么会严重影响最优矢量的判断,导致错误的转矩与定子磁链误差补偿,从而使预测误差进一步增大,降低系统控制性能。
图9为改进PTC的转矩与定子磁链误差变化曲线。细节放大图表明,所有电压矢量对应的转矩与定子磁链误差可以在一个周期内实现更新。在下一个周期进行误差补偿时,在任意电压扇区矢量条件下,都能够实现准确补偿。此时,在模型预测控制中由电机参数变化引起的转矩与定子磁链预测误差问题被有效解决。
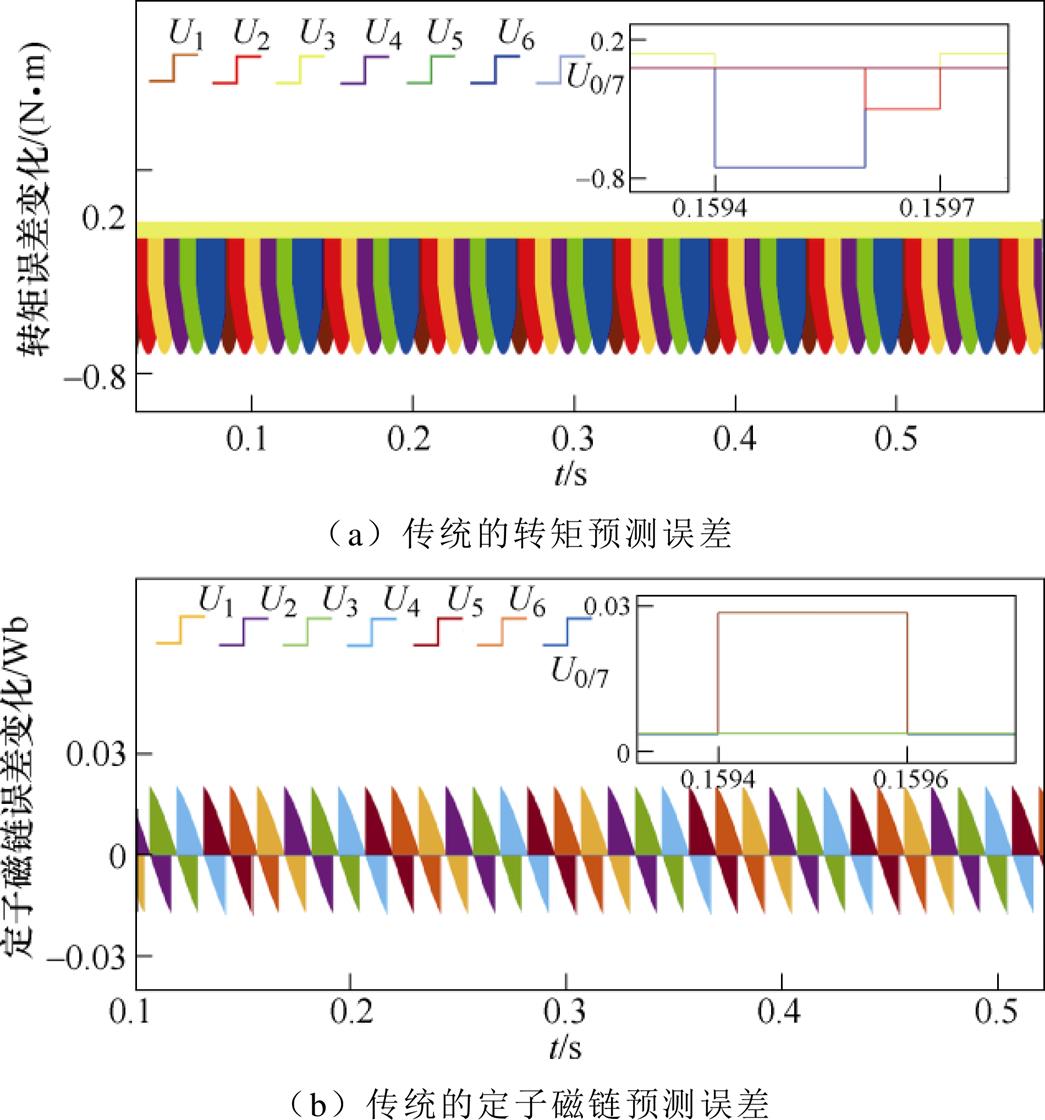
图8 传统PTC各电压扇区的转矩与定子磁链预测误差
Fig.8 Prediction error of torque and stator flux for each voltage sector of traditional PTC
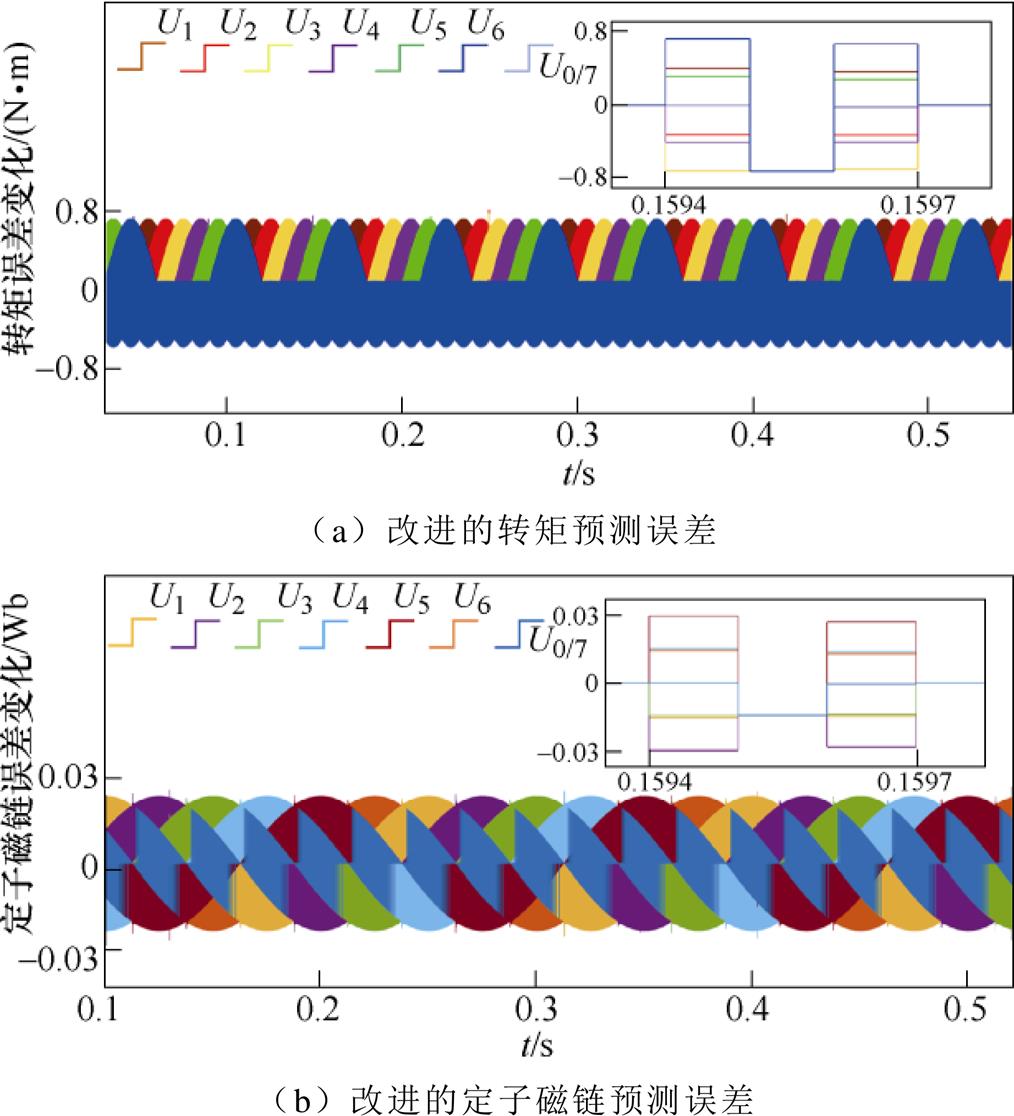
图9 改进PTC各电压扇区的转矩与定子磁链预测误差
Fig.9 Prediction error of torque and stator flux for each voltage sector of improved PTC
本节将传统PTC和改进PTC的参数鲁棒性在不同的工况下进行实验,验证改进PTC方法在参数变化时的有效性。图10为基于研旭的PMSM驱动平台。所有实验数据通过快速原型控制器(Rapid Control Prototyping, RCP)平台进行采集,同时将实验数据导入Matlab窗口进行观察和分析。
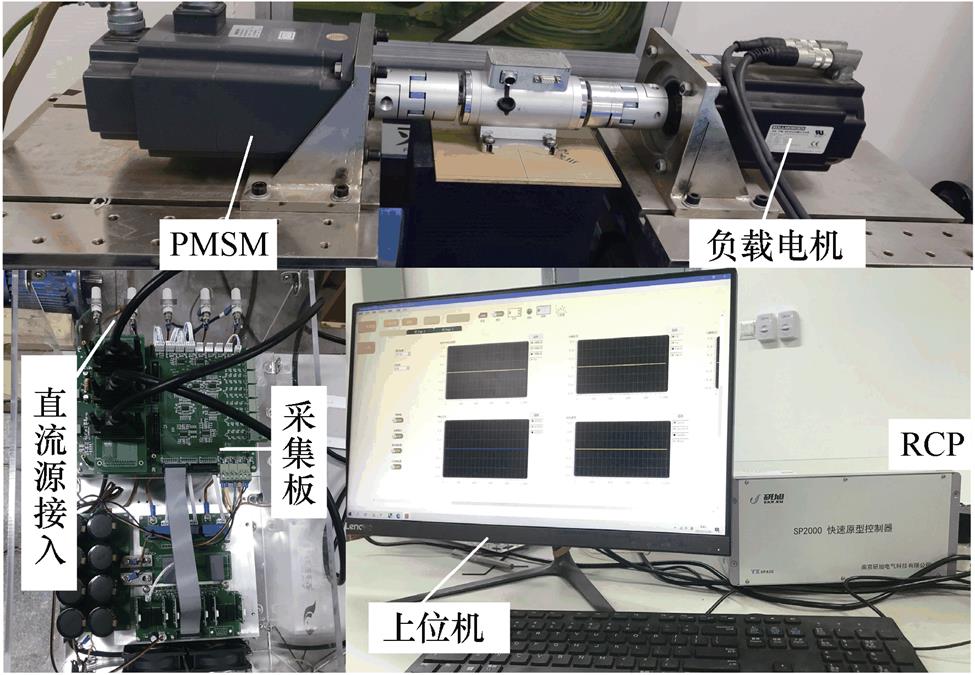
图10 实验平台
Fig.10 Experimental platform
工况一:在实验中,转速给定为500r/min,负载转矩为8N·m。
图11为传统PTC在额定电机参数下运行和1.2倍额定电机参数下运行的转矩与定子磁链实验结果。由图可知,传统PTC对电机参数变化引起的转矩与定子磁链预测误差十分敏感。即使在额定电机参数条件下运行,传统PTC仍然会存在误差,平均转矩脉动幅度为±0.9N·m,定子磁链偏移值为0.005Wb,一部分原因是由于在电流和电压的测量过程中存在误差,另一部分原因是实际电机参数在不同工况下会发生变化,说明了传统PTC对电机参数的敏感性。在1.2倍额定电机参数条件下,传统PTC产生的转矩脉动较大,平均脉动幅度可达±1.5N·m,定子磁链也出现了偏移,偏移值为0.015Wb,超过额定电机参数条件下的转矩脉动幅度和定子磁链偏移值。
图12为传统PTC在额定电机参数下运行和1.4倍额定电机参数下运行的转矩和定子磁链实验结果。由图可知,随着电机参数变化的进一步加剧,在1.4倍额定电机参数条件下,传统PTC的转矩脉动与定子磁链偏移继续增大,其中平均脉动幅度可达±2.1N·m,定子磁链偏移值为0.04Wb。
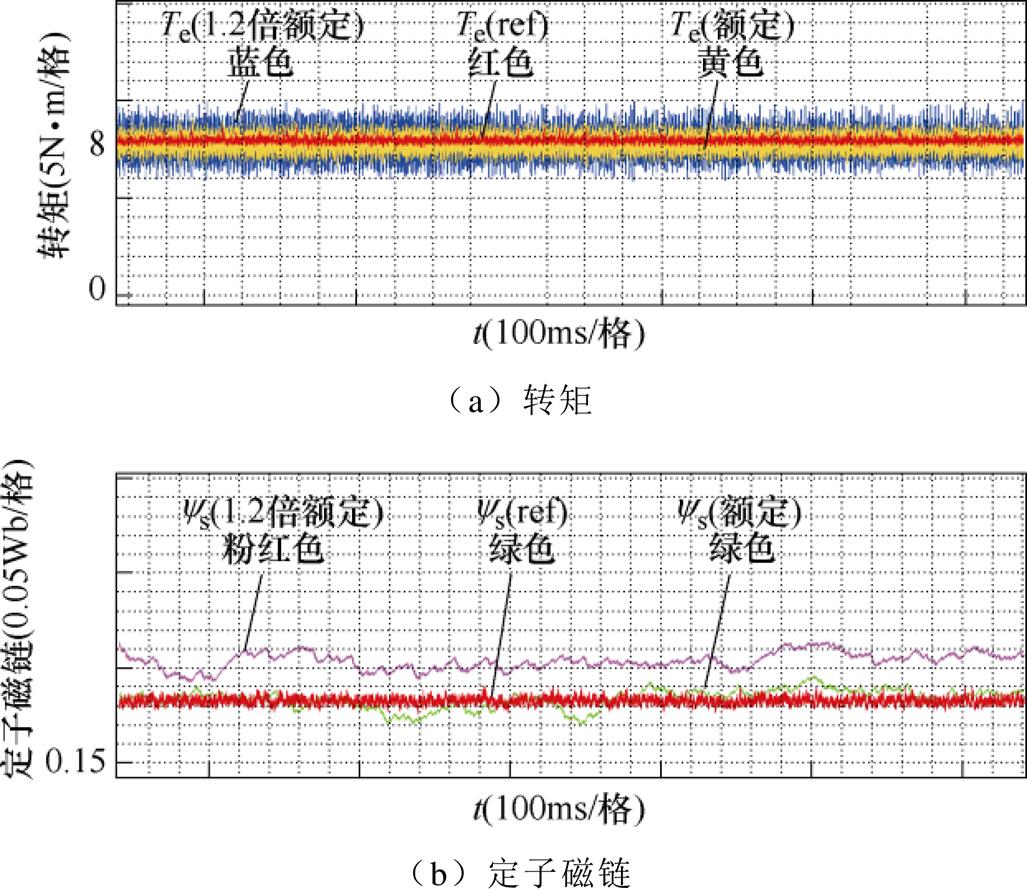
图11 工况一中1.2倍额定电机参数下传统PTC转矩与定子磁链实验波形
Fig.11 Experimental waveforms of traditional PTC torque and stator flux under 1.2 times rated motor parameters in condition 1
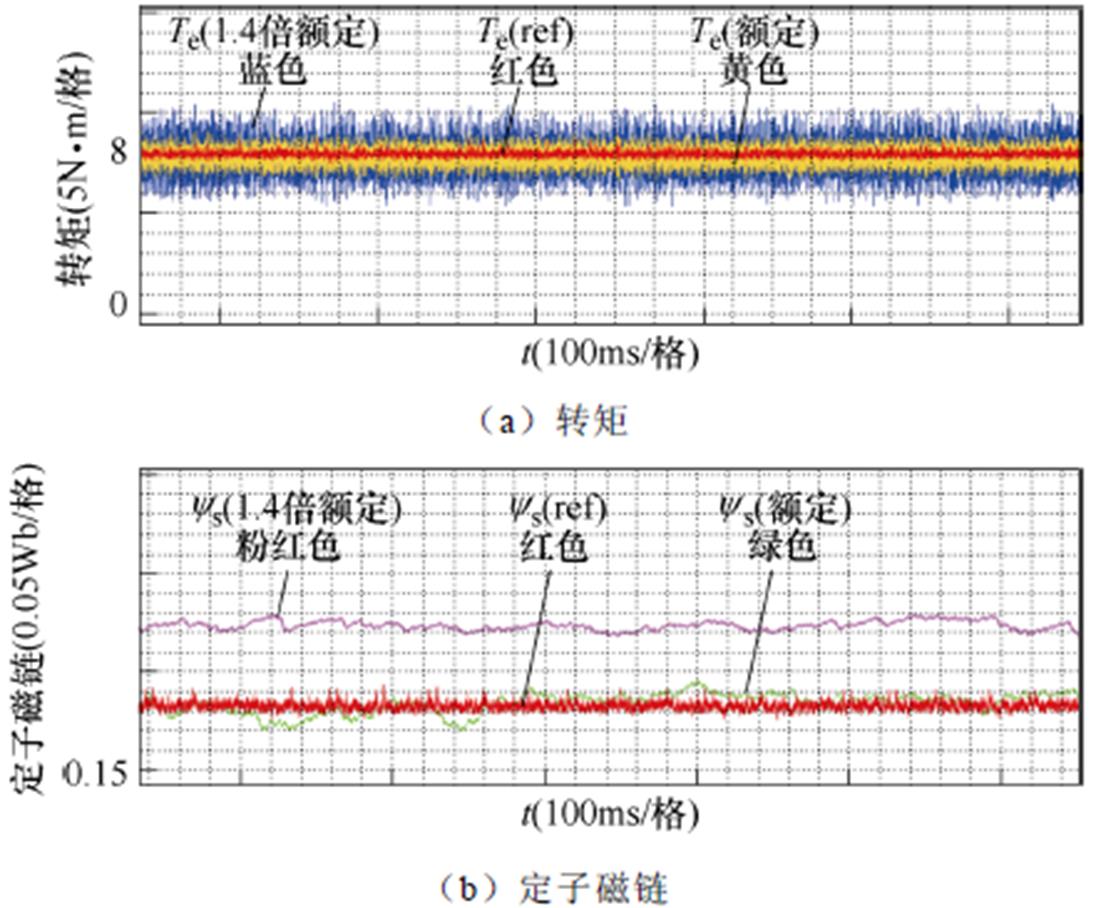
图12 工况一中1.4倍额定电机参数下传统PTC转矩与定子磁链实验波形
Fig.12 Experimental waveforms of traditional PTC torque and stator flux under 1.4 times rated motor parameters in condition 1
以上这些现象说明PTC工作过程中容易出现转矩脉动与定子磁链偏移,引起最优扇区的误判,降低控制性能,进一步表明传统PTC对电机参数变化十分敏感。
图13为在与图12相同的实验条件下,改进PTC的转矩与定子磁链实验结果。当电机参数变化引起预测误差时,改进PTC经过准确补偿后的转矩与定子磁链值没有因为电机参数变化导致转矩的明显脉动与定子磁链偏移,表明改进PTC对电机参数具有很好的鲁棒性。
事实上,在不同的工况下,电机参数发生同等变化时,转矩与定子磁链会产生不同的脉动与偏移。针对改进PTC方法,在工况二下进一步验证。
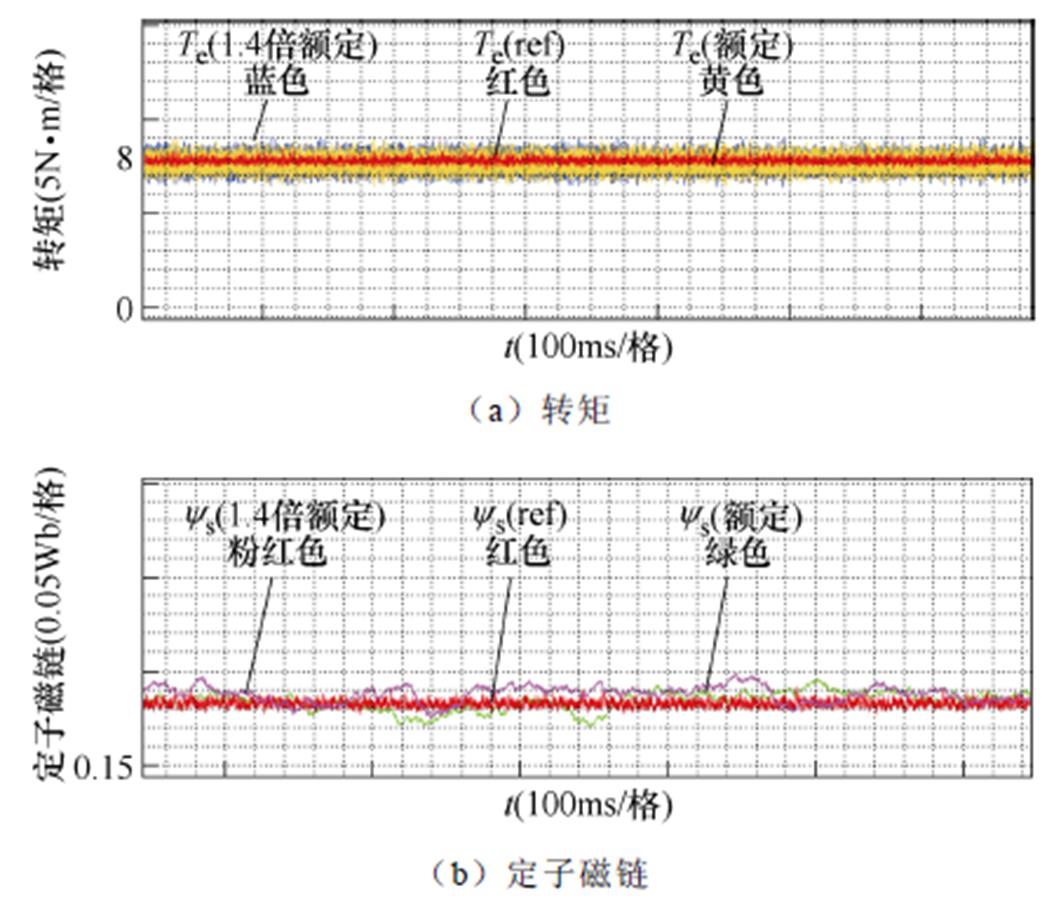
图13 工况一中1.4倍额定电机参数下改进PTC转矩与定子磁链实验波形
Fig.13 Experimental waveforms of improved PTC torque and stator flux under 1.4 times rated motor parameters in condition 1
工况二:在实验中,转速给定为1 000r/min,负载转矩为16N·m。
图14为传统PTC在额定电机参数和1.4倍额定电机参数下的运行转矩与定子磁链实验结果。当电机参数发生1.4倍变化时,传统PTC的平均转矩脉动幅度为±2.5N·m,定子磁链偏移值为0.06Wb。对比工况一中图12实验结果可知,当电机参数发生同等变化时,随着负载转矩和转速的增加,转矩的脉动值和定子磁链的偏移值均会增大,并且对于预测控制性能的不良影响更大。
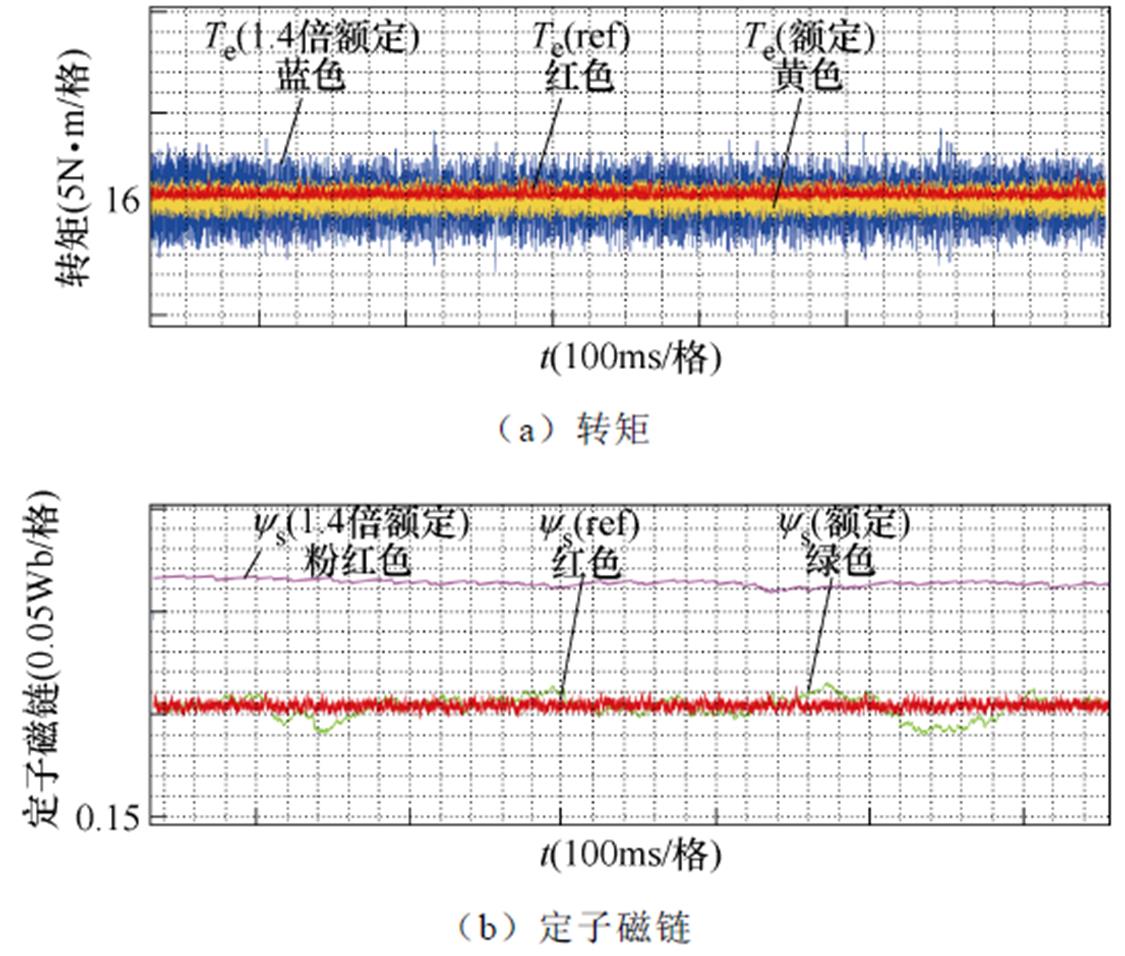
图14 工况二中1.4倍额定电机参数下传统PTC转矩与定子磁链实验波形
Fig.14 Experimental waveforms of traditional PTC torque and stator flux under 1.4 times rated motor parameters in condition 2
图15为改进PTC在与图14相同的实验条件下的转矩与定子磁链实验结果。由图可知,改进PTC方法的平均转矩脉动幅度减小到±1.0N·m,定子磁链偏移值减小到0.01Wb。由于受到控制过程中各类非线性因素和 观测器中截止频率的影响,相比额定电机参数下工作的传统PTC,其转矩脉动与定子磁链偏移值略大。
观测器中截止频率的影响,相比额定电机参数下工作的传统PTC,其转矩脉动与定子磁链偏移值略大。
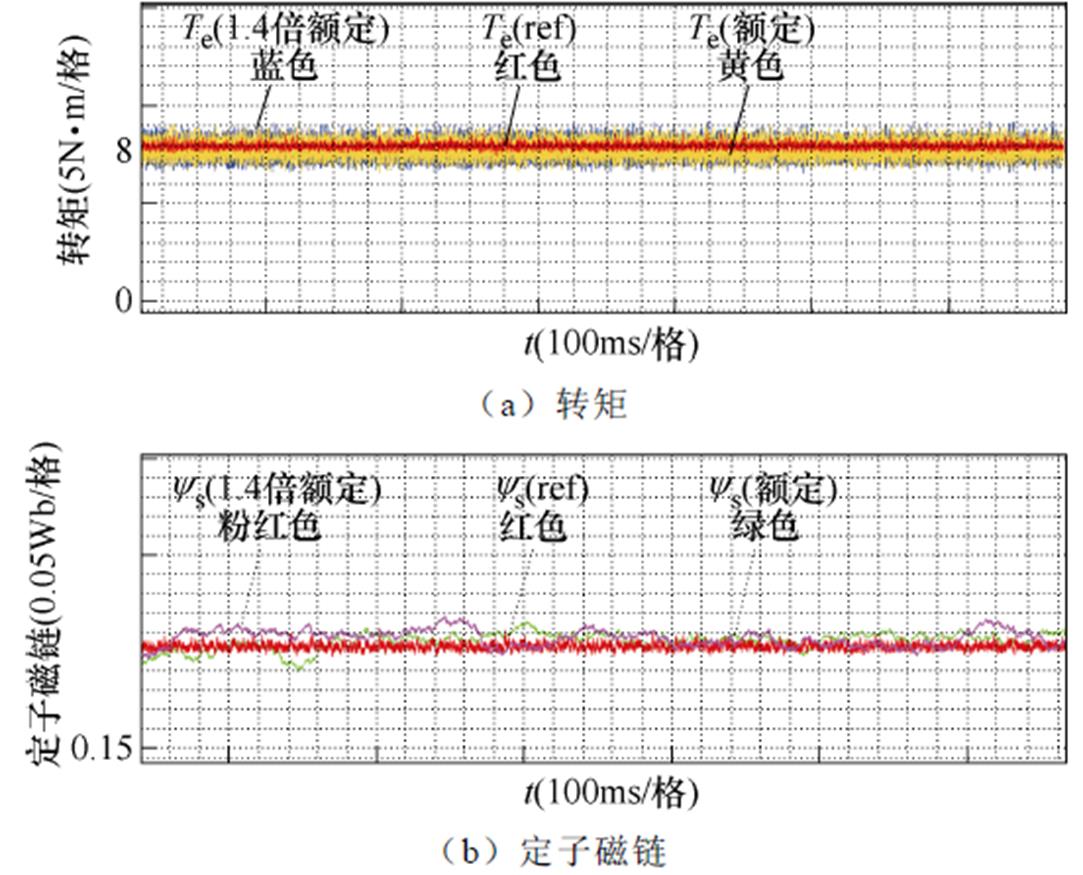
图15 工况二中1.4倍额定电机参数下改进PTC转矩与定子磁链实验波形
Fig.15 Experimental waveforms of improved PTC torque and stator flux under 1.4 times rated motor parameters in condition 2
图16和图17分别为传统PTC和改进PTC在1.4倍额定参数和额定参数条件下的动态实验结果。
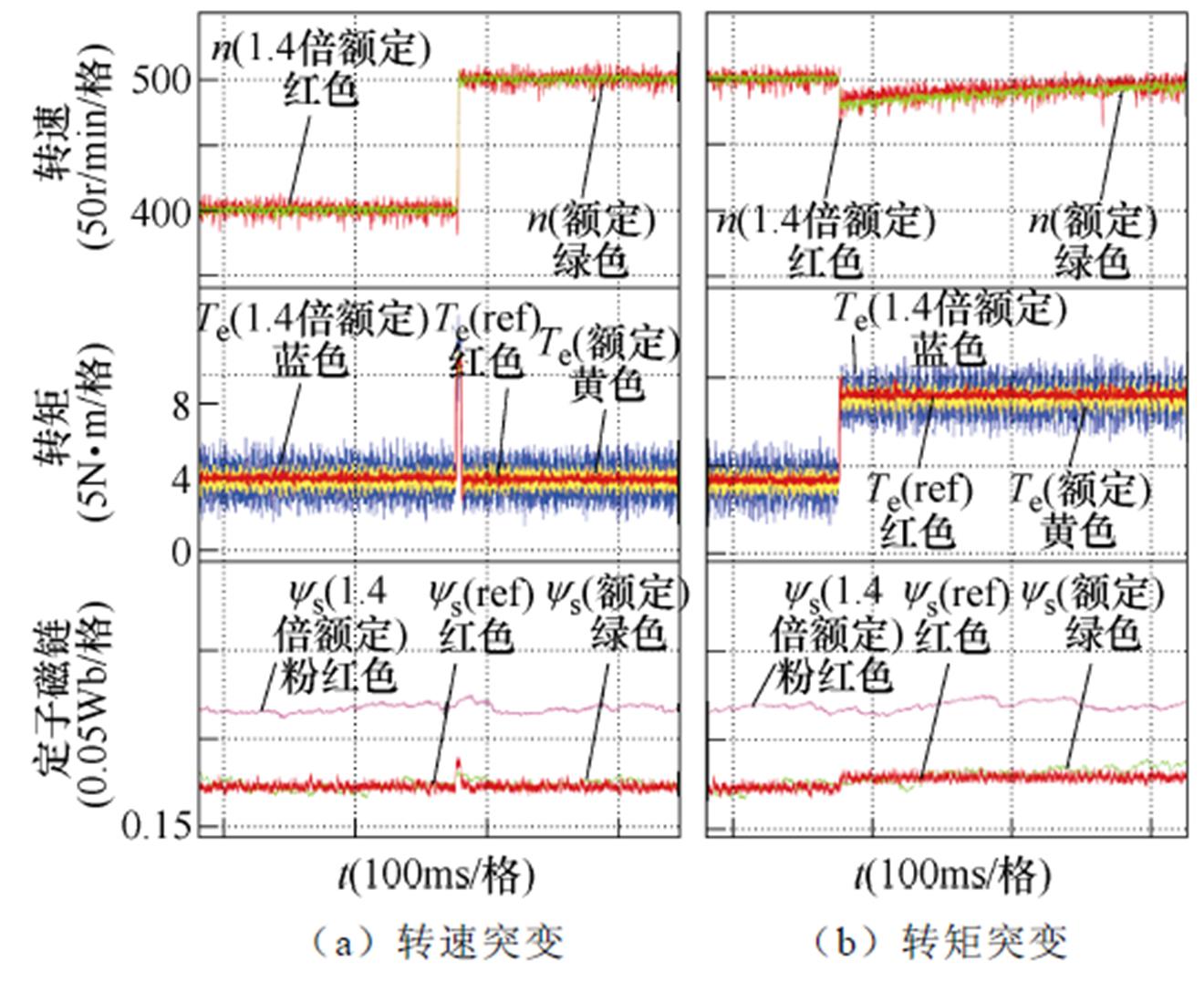
图16 传统PTC动态响应实验波形
Fig.16 Experimental waveforms of traditional PTC in the dynamic states

图17 改进PTC动态响应实验波形
Fig.17 Experimental waveforms of improved PTC in the dynamic states
如图17所示,转速运行在400r/min时,首先将转速参考值突变至500r/min,当电机转速升高至参考值后,将给定转矩从4N·m突变成8N·m。通过两种控制方法对比可以发现,改进PTC在动态实验中均未明显受电机参数变化的影响。与额定参数条件下运行相比,转矩脉动和定子磁链的偏移基本一致。同时可以看出,两种控制方法的动态调节时间基本一致,表明改进PTC能够在提升鲁棒性的同时也兼具与传统PTC一致的动态响应性能。
针对传统PTC存在的电机参数鲁棒性较差的问题,本文提出了一种转矩与定子磁链模型预测控制预测误差补偿方法。解决了传统PTC误差更新和补偿不准确的问题。根据仿真和实验结果,在不同的工况条件下,预测控制受电机电感及永磁体磁链参数变化的影响较为明显。本文所提改进PTC对电机电感及永磁磁链参数的误差均有很好的参数鲁棒性,可以得到与包含额定电机参数的传统PTC相似的静态和动态性能。相比于现有的转矩预测误差方法,该方法误差信息预测准确,在提升传统PTC参数鲁棒性的同时保证了系统的控制性能。
参考文献
[1] 刘涛, 习金玉, 宋战锋, 等. 基于多核并行计算的永磁同步电机有限集模型预测控制策略[J]. 电工技术学报, 2021, 36(1): 107-119.
Liu Tao, Xi Jinyu, Song Zhanfeng, et al. Finite control set model predictive control of permanent magnet synchronous motor based on multi-core parallel computing[J]. Transactions of China Electro- technical Society, 2021, 36(1): 107-119.
[2] 秦艳忠, 阎彦, 陈炜, 等. 永磁同步电机参数误差补偿-三矢量模型预测电流控制[J]. 电工技术学报, 2020, 35(2): 255-265.
Qin Yanzhong, Yan Yan, Chen Wei, et al. Three- vector model predictive current control strategy for permanent magnet synchronous motor drives with parameter error compensation[J]. Transactions of China Electrotechnical Society, 2020, 35(2): 255- 265.
[3] Zheng Junqiang, Zhao Wenxiang, Ji Jinghua, et al. Quantitative analysis on maximum efficiency point and specific high-efficiency region of permanent- magnet machines[J]. IEEE Transactions on Industrial Electronics, 2022, 69(2): 1333-1345.
[4] 刘佳敏, 葛召炎, 吴轩, 等. 基于占空比调制的永磁同步电机预测电流控制[J]. 中国电机工程学报, 2020, 40(10): 3319-3328.
Liu Jiamin, Ge Zhaoyan, Wu Xuan, et al. Predictive current control of permanent magnet synchronous motor based on duty-cycle modulation[J]. Pro- ceedings of the CSEE, 2020, 40(10): 3319-3328.
[5] Niu Feng, Chen Xi, Huang Shaopo, et al. Model predictive current control with adaptive-adjusting timescales for PMSMs[J]. CES Transactions on Elec- trical Machines and Systems, 2021, 5(2): 108-117.
[6] 陈卓易, 屈稳太. 基于PID型代价函数的永磁同步电机模型预测电流控制[J]. 电工技术学报, 2021, 36(14): 2971-2978.
Chen Zhuoyi, Qu Wentai. Model predictive current control for permanent magnet synchronous motors based on PID-type cost function[J]. Transactions of China Electrotechnical Society, 2021, 36(14): 2971- 2978.
[7] 李昱, 郭宏, 平朝春, 等. 基于电流源变流器的永磁同步电机驱动系统全状态变量预测转矩控制[J]. 电工技术学报, 2021, 36(1): 15-26.
Li Yu, Guo Hong, Ping Zhaochun, et al. A full-state variable predictive torque control of current source converter fed permanent magnet synchronous motor drives[J]. Transactions of China Electrotechnical Society, 2021, 36(1): 15-26.
[8] 杨兴武, 杨帆, 薛花, 等. 基于占空比调制的模块化多电平换流器模型预测控制[J]. 电力系统自动化, 2021, 45(17): 134-142.
Yang Xingwu, Yang Fan, Xue Hua, et al. Duty-cycle modulation based model predictive control of modular multilevel converter[J]. Automation of Electric Power Systems, 2021, 45(17): 134-142.
[9] Nguyen H T, Jung J W. Finite control set model predictive control to guarantee stability and robustness for surface-mounted PM synchronous motors[J]. IEEE Transactions on Industrial Electronics, 2018, 65(11): 8510-8519.
[10] 王祯, 尹项根, 陈玉, 等. 基于连续控制集模型预测控制的MMC桥臂电流控制策略[J]. 电力系统自动化, 2020, 44(10): 85-91.
Wang Zhen, Yin Xianggen, Chen Yu, et al. Arm current control strategy of modular multilevel converter based on continuous control set model predictive control[J]. Automation of Electric Power Systems, 2020, 44(10): 85-91.
[11] 於锋, 朱晨光, 吴晓新, 等. 基于矢量分区的永磁同步电机三电平双矢量模型预测磁链控制[J]. 电工技术学报, 2020, 35(10): 2130-2140.
Yu Feng, Zhu Chenguang, Wu Xiaoxin, et al. Two- vector-based model predictive flux control of three- level based permanent magnet synchronous motor with sector subregion[J]. Transactions of China Elec- trotechnical Society, 2020, 35(10): 2130-2140.
[12] 姚绪梁, 黄乘齐, 王景芳, 等. 两相静止坐标系下的永磁同步电动机模型预测功率控制[J]. 电工技术学报, 2021, 36(1): 60-67.
Yao Xuliang, Huang Shengqi, Wang Jingfang, et al. Model predictive power control of permanent magnet synchronous motor in two-phase static coordinate system[J]. Transactions of China Electrotechnical Society, 2021, 36(1): 60-67.
[13] 王庚, 杨明, 牛里, 等. 永磁同步电机电流预测控制电流静差消除算法[J]. 中国电机工程学报, 2015, 35(10): 2544-2551.
Wang Geng, Yang Ming, Niu Li, et al. A static current error elimination algorithm for PMSM predi- ctive current control[J]. Proceedings of the CSEE, 2015, 35(10): 2544-2551.
[14] Wang Fengxiang, Li Shihua, Mei Xuezhu, et al. Model-based predictive direct control strategies for electrical drives: an experimental evaluation of PTC and PCC methods[J]. IEEE Transactions on Industrial Informatics, 2015, 11(3): 671-681.
[15] 赵凯辉, 周瑞睿, 冷傲杰, 等. 一种永磁同步电机的有限集无模型容错预测控制算法[J]. 电工技术学报, 2021, 36(1): 27-38.
Zhao Kaihui, Zhou Ruirui, Leng Aojie, et al. Finite control set model-free fault-tolerant predictive control for permanent magnet synchronous motor[J]. Transa- ctions of China Electrotechnical Society, 2021, 36(1): 27-38.
[16] 史涔溦, 解正宵, 陈卓易, 等. 永磁同步电机无参数超局部模型预测控制[J]. 电机与控制学报, 2021, 25(8): 1-8.
Shi Cenwei, Xie Zhengxiao, Chen Zhuoyi, et al. Model- free predictive control based on ultra-local model for permanent magnet synchronous machines[J]. Electric Machines and Control, 2021, 25(8): 1-8.
[17] Zhou Yanan, Li Hongmei, Liu Rundong, et al. Con- tinuous voltage vector model-free predictive current control of surface mounted permanent magnet syn- chronous motor[J]. IEEE Transactions on Energy Conversion, 2019, 34(2): 899-908.
[18] Yang Ming, Lang Xiaoyu, Long Jiang, et al. Flux immunity robust predictive current control with incremental model and extended state observer for PMSM drive[J]. IEEE Transactions on Power Elec- tronics, 2017, 32(12): 9267-9279.
[19] Liao Huanyue, Zhang Xin, Ma Zhijun. Robust dicho- tomy solution-based model predictive control for the grid-connected inverters with disturbance observer[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(2): 81-89.
[20] Zhang Yongchang, Jin Jialin, Huang Lanlan. Model- free predictive current control of PMSM drives based on extended state observer using ultralocal model[J]. IEEE Transactions on Industrial Electronics, 2021, 68(2): 993-1003.
[21] 周湛清, 夏长亮, 陈炜, 等. 具有参数鲁棒性的永磁同步电机改进型预测转矩控制[J]. 电工技术学报, 2018, 33(5): 965-972.
Zhou Zhanqing, Xia Changliang, Chen Wei, et al. Modified predictive torque control for PMSM drives with parameter robustness[J]. Transactions of China Electrotechnical Society, 2018, 33(5): 965-972.
[22] Wu Gongping, Huang Sheng, Wu Qiuwei, et al. Predictive torque and stator flux control for N*3- phase PMSM drives with parameter robustness improve- ment[J]. IEEE Transactions on Power Electronics, 2021, 36(2): 1970-1983.
[23] Zhang Yongchang, Zhu Jianguo. Direct torque control of permanent magnet synchronous motor with reduced torque ripple and commutation frequency[J]. IEEE Transactions on Power Electronics, 2011, 26(1): 235- 248.
Model Predictive Torque and Stator Flux Control Method for PMSMs with Prediction Error Compensation
Abstract This paper proposes a model predictive control method with prediction error compensation for permanent magnet synchronous motors (PMSMs), which can improve the poor robustness of motor parameters in the finite-control-set model prediction control. The proposed method has two loops of torque and stator flux separately. The error value between the predicted and actual values at the moment k is fed back to the prediction model at the moment k+1 as a compensation factor. The prediction error of the torque and stator flux was estimated for all voltage vectors in every control cycle to ensure the prediction accuracy. Therefore, when motor parameters are mismatched, the proposed method can achieve reliable torque and stator flux prediction control by online error compensation. Simulation and experimental results prove the effectiveness of the proposed method.
Keywords:Permanent magnet synchronous motors, predictive control of torque and stator flux, prediction error compensation, parameter robustness
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.220617
国家自然科学基金(52177056)和陕西省重点研发计划(2021GY- 129)资助项目。
收稿日期 2022-04-18
改稿日期 2022-06-14
E-mail: zhouqixun@xust.edu.cn(通信作者)
刘 帆 男,1998年生,硕士研究生,研究方向为永磁同步电机系统及其控制。
E-mail: liufan@stu.xust.edu.cn
(编辑 崔文静)