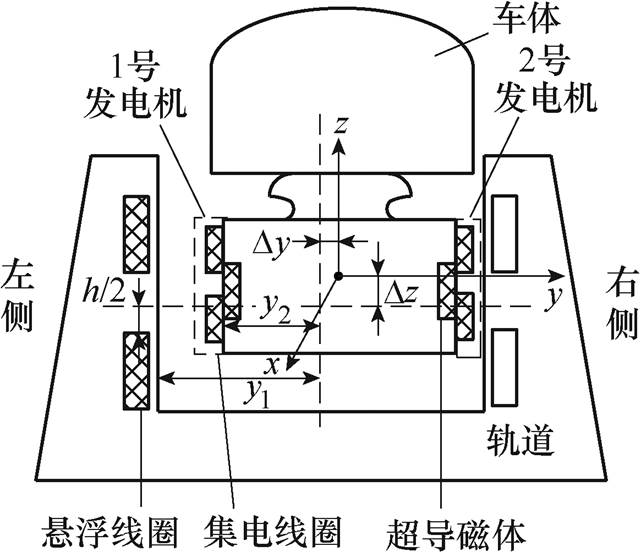
图1 直线发电机整体结构
Fig.1 Structure of linear generator
摘要 直线发电机是高速磁悬浮系统中无接触车载供电的关键设备,该设备在多工况下的输出特性是发电能力的主要衡量指标。利用空间谐波法对超导磁体三维磁通进行表征,建立直线发电机磁动势分布模型。通过分析超导磁体与轨道侧壁悬浮线圈间的电磁耦合关系,得出悬浮线圈电流和悬浮线圈谐波磁场磁通密度的表达式。进一步地,将悬浮线圈谐波磁场作为集电线圈激励,推导出适用于多工况下直线发电机感应电动势的数值解析表达式。最后,通过将数值解析结果与日本山梨线试验数据的对比,验证了磁动势分布模型和电磁解析模型的准确性。该工作为高速磁悬浮系统直线发电机的设计和控制提供了相关理论基础。
关键词:高速磁悬浮系统 直线发电机 电磁解析模型 多工况 感应电动势
在更高的运行速度、更短的旅行时间以及更舒适的乘坐环境等要求下,高速磁悬浮列车被列为重点研发对象。高速磁悬浮列车需采用非接触式供电,而直线发电机是高速磁悬浮系统中车载供电的关键设备[1-4]。其中,电动悬浮系统直线发电机的电磁特性是其重要研究内容。
文献[5]利用有限元法构建发电机模型,在发电机输出特性基础上定义目标函数,并针对目标函数迭代改变发电机配置,得到输出特性最优解。为提高发电机运行效率、减少能量损失,文献[6]提出直线发电机瞬时电流控制策略,利用瞬时电流补偿无功功率,实现功率因数为1,从而获得足够的电力。文献[7]是前种方法的改进,提出控制单相瞬时电流来补偿不平衡三相无功功率的方法,进而实现高功率因数控制。文献[8]提出一种零序型集电线圈,用试验验证了速度在300km/h后直线发电机能达到25kW的目标集电功率。文献[9]综合考虑超导磁体外壳的涡流对电磁特性的影响,研究发现,涡流能够提升悬浮线圈以及集电线圈的感应电动势。文献[10]发现,直线发电机同时具备发电功能以及调节转向架阻尼特性,提出通过控制集电线圈电流的相位进而提升转向架阻尼。而文献[11]提出一种无传感器直线发电机阻尼器,通过向直线发电机集电线圈注入电流以产生垂直方向电磁力,进而衰减列车运行时的振动。
目前,针对电动悬浮系统直线发电机的研究主要针对发电机高性能优化控制策略和列车无偏移工况下直线发电机的电磁特性。对磁悬浮列车横向、垂向偏移等多工况下直线发电机电磁特性的理论解析研究不足。综上所述,该文提出一种适用于多工况下直线发电机电磁解析模型。利用空间高次谐波法建立超导磁体的磁动势分布模型,根据超导磁体、悬浮线圈、集电线圈三者间的电磁耦合关系,推导出多工况下直线发电机感应电动势解析表达式。揭示了感应电动势、功率随列车偏移量的变化规律,解析模型在电动悬浮系统直线发电机结构设计和特征分析上具有优势,为直线发电机设计与控制提供了相关理论依据。
电动悬浮系统直线发电机整体结构如图1所示。超导磁体置于磁悬浮列车转向架两侧,集电线圈装于超导磁体外侧,超导磁体和集电线圈随列车同步运行[12]。悬浮线圈固定于轨道两侧,沿列车线路铺设。转向架每侧有4个超导磁体,相邻超导磁体极性相反。列车运行时超导磁体产生的磁场被悬浮线圈切割,于是在悬浮线圈中产生感应电流和磁场。同时,集电线圈与悬浮线圈存在相对位移,集电线圈切割悬浮线圈感应磁场,继而产生感应电动势。磁悬浮列车发生横向偏移,车体在y轴方向的偏移量为Dy;而发生垂向偏移,车体在z轴方向偏移量为Dz。磁悬浮列车未发生偏移时:超导磁体顶部与悬浮线圈中心的距离h/2=40mm;悬浮线圈与转向架中心的距离为y1;集电线圈与转向架中心的距离为y2。其中,|y1-y2|=110mm。
图1 直线发电机整体结构
Fig.1 Structure of linear generator
一组集电线圈有两个u相、一个v相、一个w相。其中,v相与w相线圈尺寸一致。单个超导磁体极距下对应一组集电线圈和一组悬浮线圈。超导x方向的磁体极距为t,长度为a0。悬浮线圈极距为t1,长度为a1。u相集电线圈极距为xu,长度为au。线圈的排布关系如图2所示。
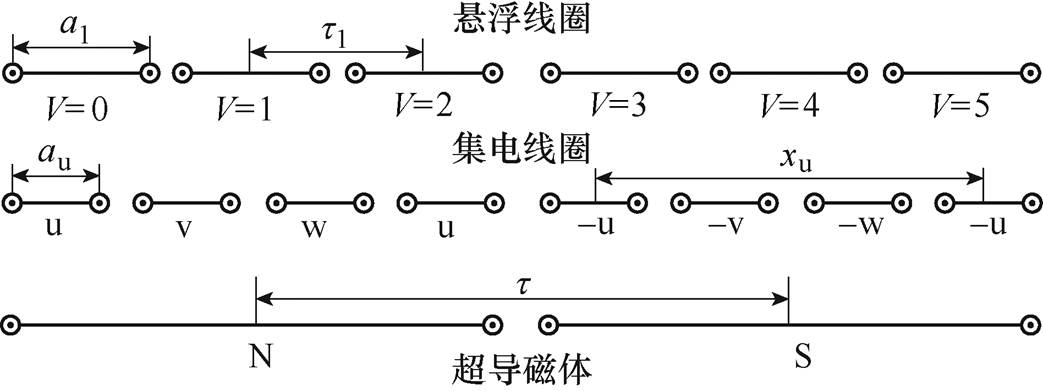
图2 线圈的排布关系
Fig.2 The arrangement of the coils
利用空间谐波法,在x方向和z方向分别构建超导磁体磁动势分布模型。其中,x轴方向为实际存在的超导磁体,z方向假设存在无限多的超导磁体[13-14]。超导磁体z方向极距为lz,超导磁体匝数为Ns,单匝线圈电流为Is,m0为真空磁导率。图3为超导磁体磁动势分布模型。
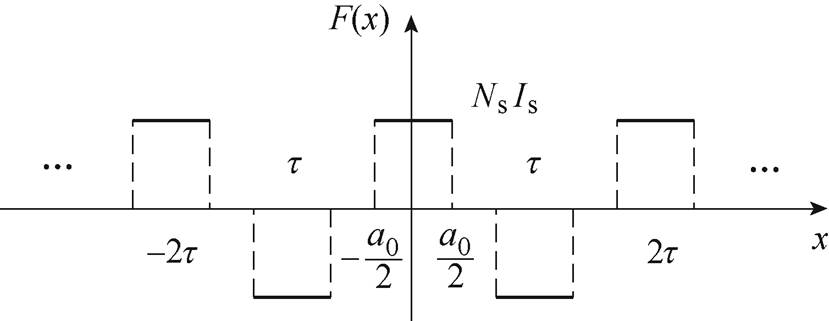
图3 磁动势分布模型
Fig.3 Magnetomotive force distribution model
将超导磁体磁动势写为傅里叶级数[15]求和形式,求出x轴方向傅里叶系数fm(m=1, 2, 3,…)为
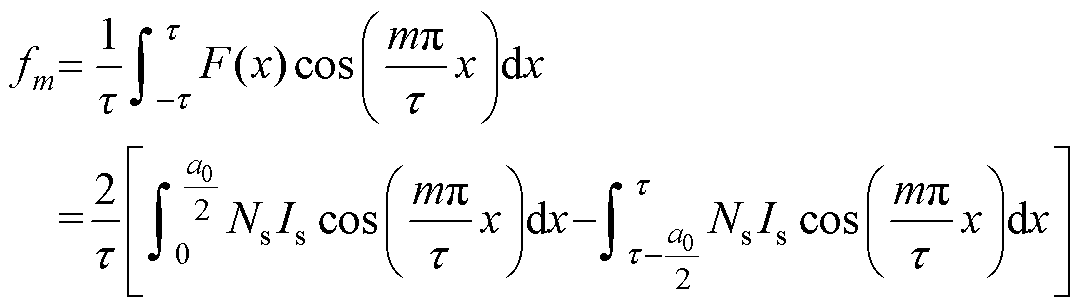 (1)
(1)
超导磁体中心z轴坐标为z=z0,依据式(1)得到其磁动势在x方向分布的级数形式为
 (2)
(2)
超导磁体磁动势在z轴方向傅里叶系数fn(n= 1, 2, 3,…)为
 (3)
(3)
推出超导磁体磁动势在xOz平面分布的级数为
 (4)
(4)
 (5)
(5)
依据式(5),利用边界条件[16]求解得到超导磁体在y轴方向的磁感应强度表达式为

(6)
其中
 (7)
(7)
式中,b0为超导磁体的高度。
图4为各线圈在yOz平面位置,原点为列车转向架中心。超导磁体中心为(x0, y0, z0),悬浮线圈中心为(x1, y1, 0),集电线圈中心为(x2, y2, 0)。z1U、z1B分别为悬浮线圈上线圈与下线圈中心z轴坐标,z2U、z2B分别为集电线圈上线圈与下线圈中心z轴坐标,b2U、b2B分别为集电线圈上线圈与下线圈高度,b1为悬浮线圈高度。
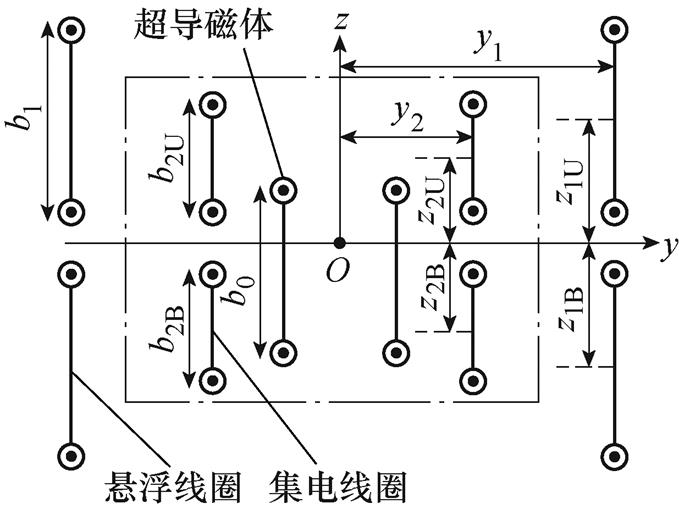
图4 各线圈在yOz平面位置
Fig.4 The position of each coil in the yOz plane
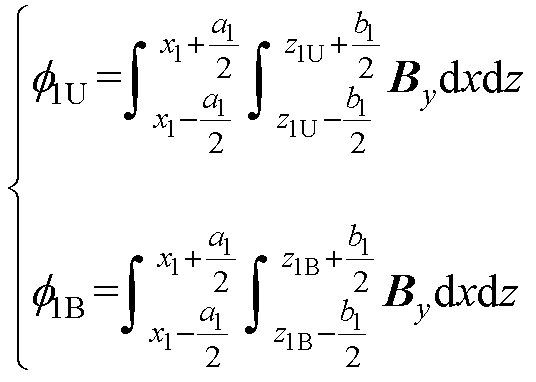
利用超导磁体的磁感应强度在悬浮线圈区域进行面积分,得到悬浮线圈上线圈与超导磁体磁感应强度的交链磁通 和悬浮线圈下线圈与超导磁体磁感应强度的交链磁通
和悬浮线圈下线圈与超导磁体磁感应强度的交链磁通 分别表示为
分别表示为
 (8)
(8)
 (9)
(9)
 (10)
(10)
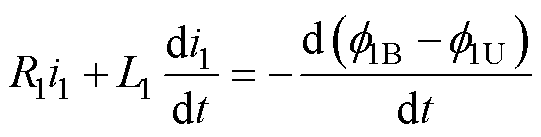
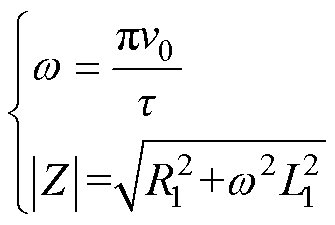
式中,R1、L1分别为悬浮线圈的电阻和电感;v0为列车运行速度;w 为悬浮线圈电流基波角频率;|Z|为悬浮线圈的阻抗的模值。
可解得悬浮线圈电流i1为
 (11)
(11)
其中
 (12)
(12)
式中,V为悬浮线圈标号,如图2所示;N1为悬浮线圈匝数。
悬浮线圈电流的磁感应强度推导过程和2.1节求解超导磁体磁感应强度的方法类似,此处不再赘述。电动悬浮系统直线发电机主要利用悬浮线圈电流的5次谐波磁场B5i感应发电[17],悬浮线圈电流5次谐波磁场的磁感应强度为
 (13)
(13)
式中,当i=U时,B5U为悬浮线圈上线圈的5次谐波磁场;当i=B时,B5B为悬浮线圈下线圈的5次谐波磁场;I11为悬浮线圈电流基波分量幅值。
悬浮线圈5次谐波磁场与集电线圈的交链磁通为
 (14)
(14)
式中,i=U为悬浮线圈上线圈,i=B为悬浮线圈下线圈;j=U为集电线圈上线圈,j=B为集电线圈下线圈; 、
、 分别为集电线圈的上线圈和下线圈与悬浮线圈上线圈5次谐波磁场的交链磁通;
分别为集电线圈的上线圈和下线圈与悬浮线圈上线圈5次谐波磁场的交链磁通; 、
、 分别为集电线圈上线圈和下线圈与悬浮线圈下线圈5次谐波磁场的交链磁通。
分别为集电线圈上线圈和下线圈与悬浮线圈下线圈5次谐波磁场的交链磁通。
推导出集电线圈感应电动势解析表达式[18-19]为
 (15)
(15)
其中
 (16)
(16)
 (17)
(17)
以日本山梨试验线电动悬浮系统直线发电机为研究对象,直线发电机主要参数[17]见表1。为验证电磁解析模型的有效性,将该文解析计算结果与有限元结果和实测数据[8, 10]进行对比,解析结果与实测数据吻合较好,验证了解析模型的正确性。
表1 直线发电机主要参数
Tab.1 Linear generator part of the parameters (单位: mm)
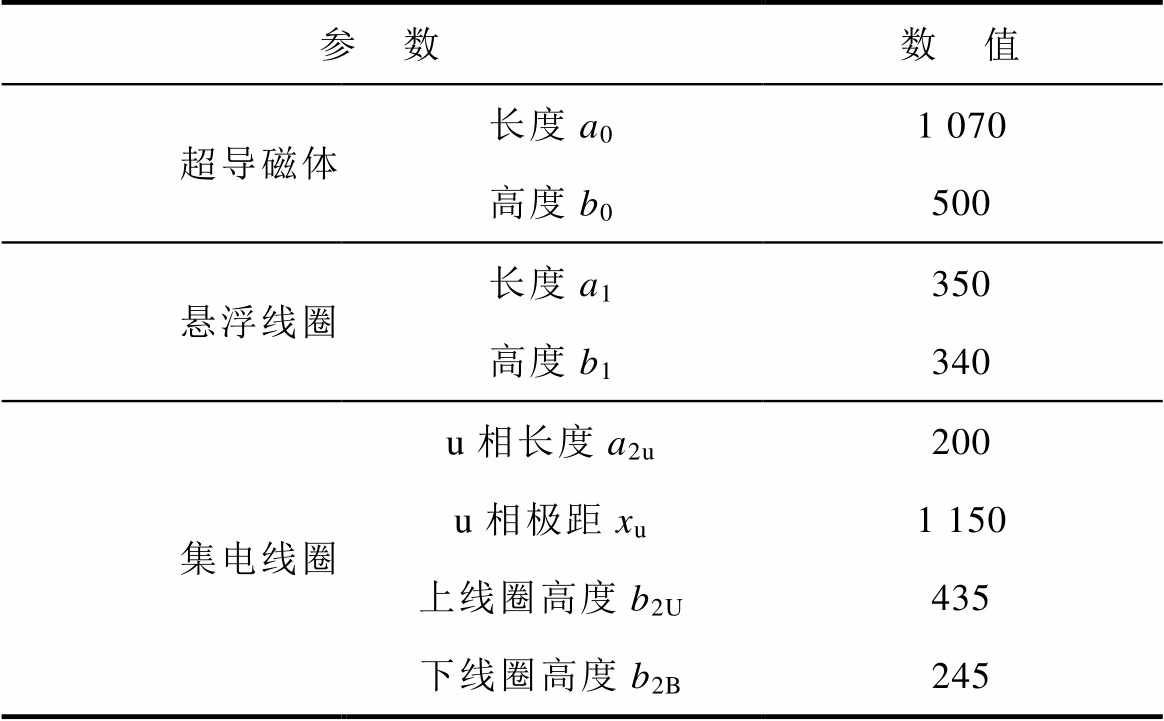
参 数数 值 超导磁体长度a01 070 高度b0500 悬浮线圈长度a1350 高度b1340 集电线圈u相长度a2u200 u相极距xu1 150 上线圈高度b2U435 下线圈高度b2B245
解析值与有限元对比验证如图5所示。图5a为超导磁体磁感应强度沿x方向分布。可知,两条曲线均呈马鞍形,解析计算结果与有限元结果几乎一致。图5b为集电线圈感应电动势解析值与有限元对比,相对误差为2.6%,且曲线高度吻合,由此验证了解析模型的有效性。

图5 解析值与有限元对比验证
Fig.5 Analytical value and finite element verification
感应电动势、功率对比验证如图6所示。图6a描述了集电线圈感应电动势与速度的关系。可知,在100~500km/h区段,感应电动势与速度近似呈线性关系。感应电动势解析值与实测数据最大相对误差为10.4%。图6b为功率与速度的关系。可知,速度380km/h,达到目标集电功率25kW。功率的解析值与实测数据最大相对误差为8.7%,验证了电磁解析模型的正确性。误差主要来源于试验设备中超导磁体外部杜瓦外壳表面的涡流会造成不可避免的测量误差。
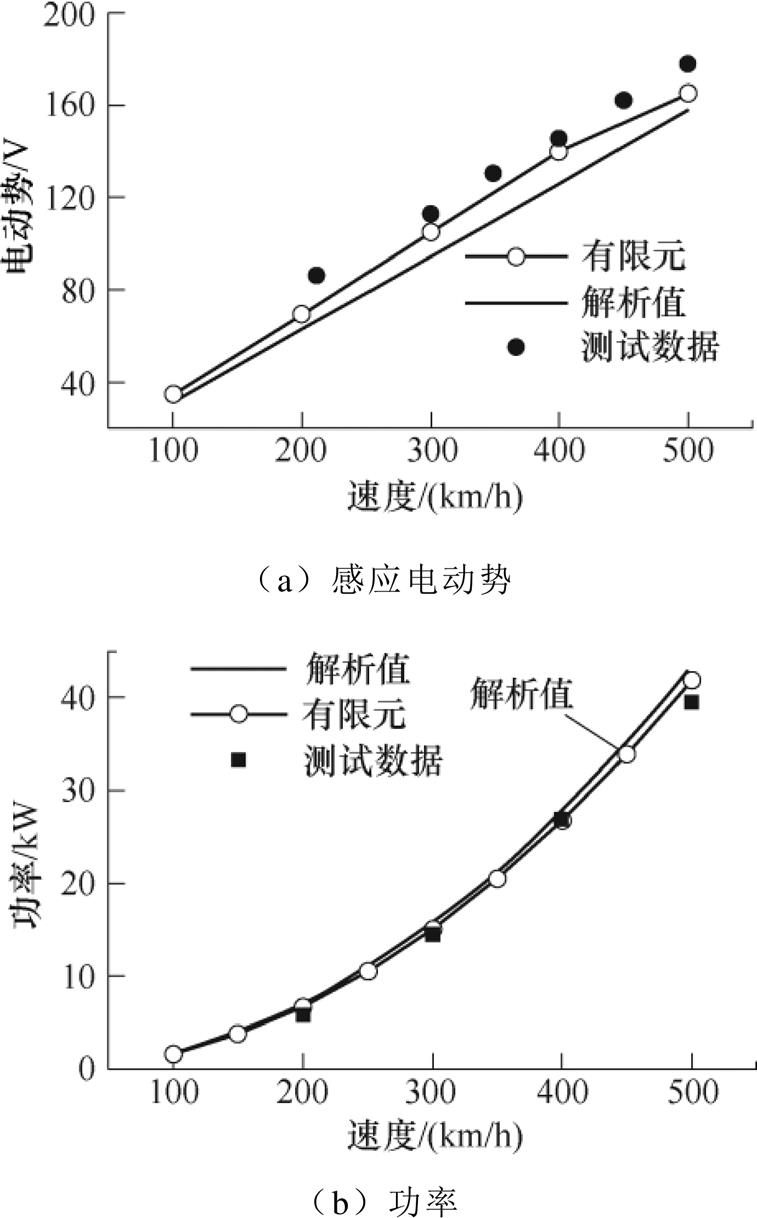
图6 感应电动势、功率对比验证
Fig.6 Collector voltage and power verification
图7为悬浮线圈电流5次谐波磁场与速度、偏移量的关系。速度大于100km/h,进入饱和区段。这由于随着速度升高,悬浮线圈中磁通变化率增大,悬浮线圈趋肤效应的影响显著,增大了悬浮线圈的交流阻抗,使磁感应强度趋近饱和。
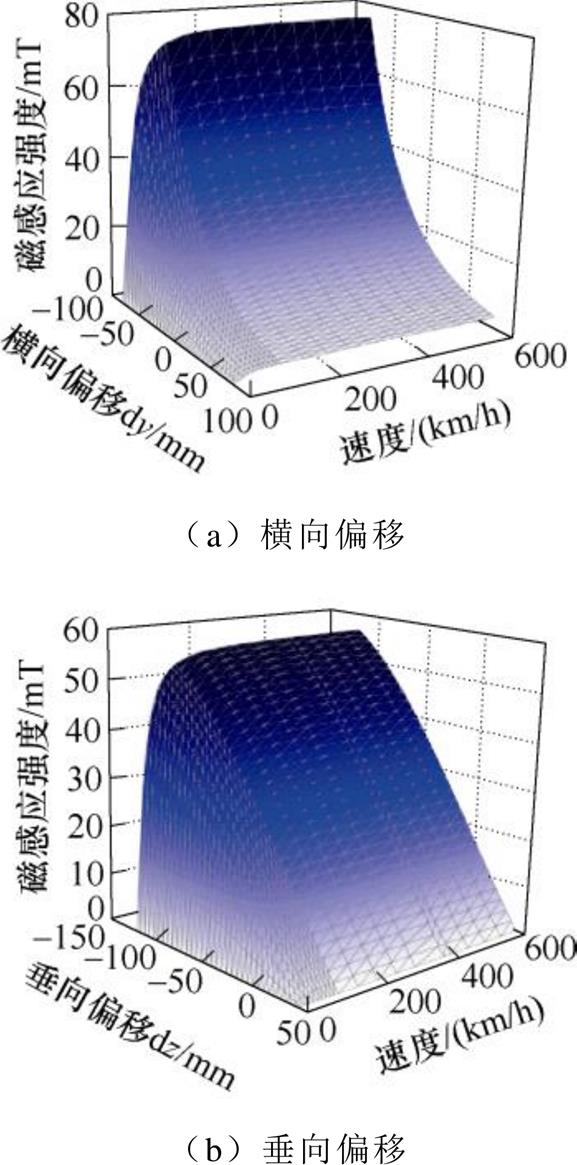
图7 5次谐波磁场
Fig.7 Fifth harmonic magnetic field
图8为功率和感应电动势与垂向偏移的关系。可知,功率与感应电动势随垂向偏移增大,呈减小趋势。当Dz=-90mm,超导磁体底部与悬浮线圈底部正对,集电线圈与悬浮线圈电流交链磁通达到最大,此时功率和感应电动势最大。Dz=40mm,超导磁体中心与悬浮线圈中心正对,集电线圈与悬浮线圈电流交链磁通为零,故功率和感应电动势为零。
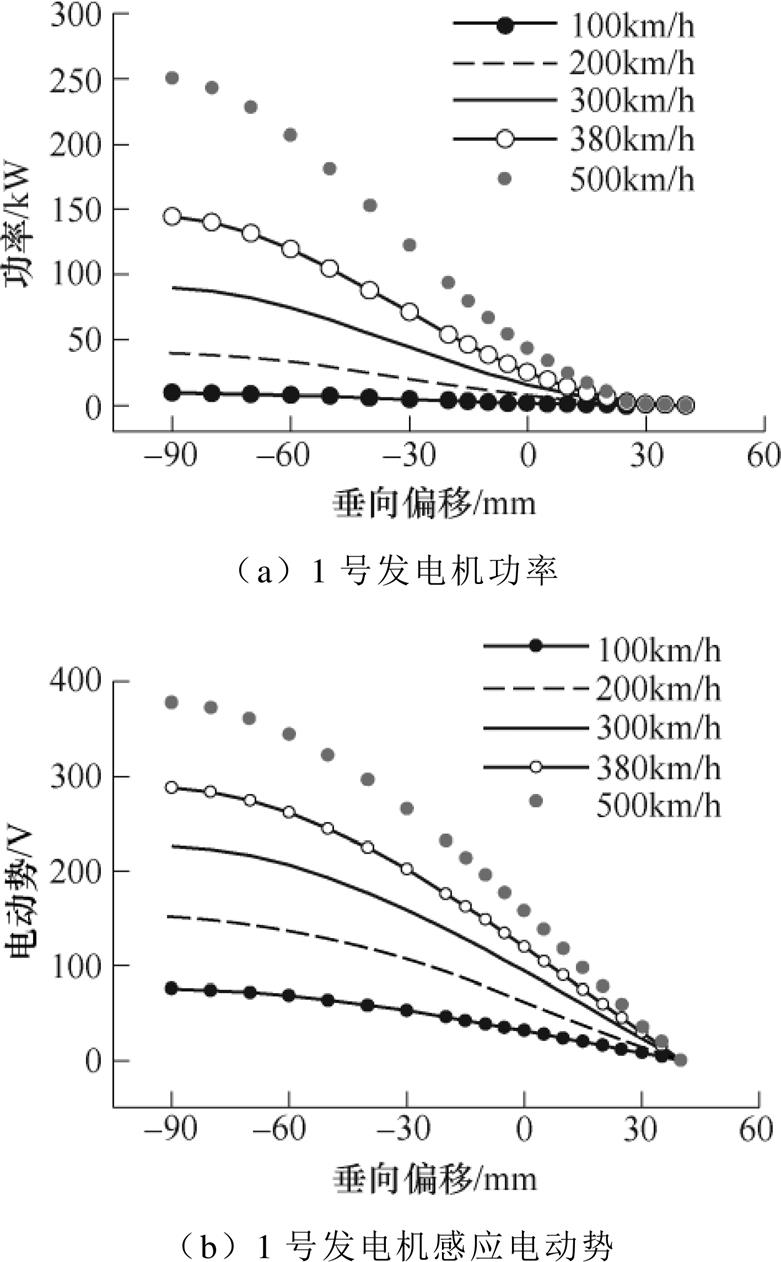
图8 功率、感应电动势与垂向偏移的关系
Fig.8 Power, induced electromotive force and Dz
功率、感应电动势与横向位移的关系如图9所示。图9a为双侧发电机总功率与横向偏移的关系。可知,双侧发电机总功率与横向偏移量呈二次非线性关系,总功率随横向偏移量的绝对值增大,呈上升趋势。图9b为1号发电机感应电动势,可知,感应电动势随横向偏移呈递减趋势。原因是当向轨道侧发生横向偏移时,悬浮线圈的谐波磁场与集电线圈的交链磁通量增大,从而感应电动势上升。
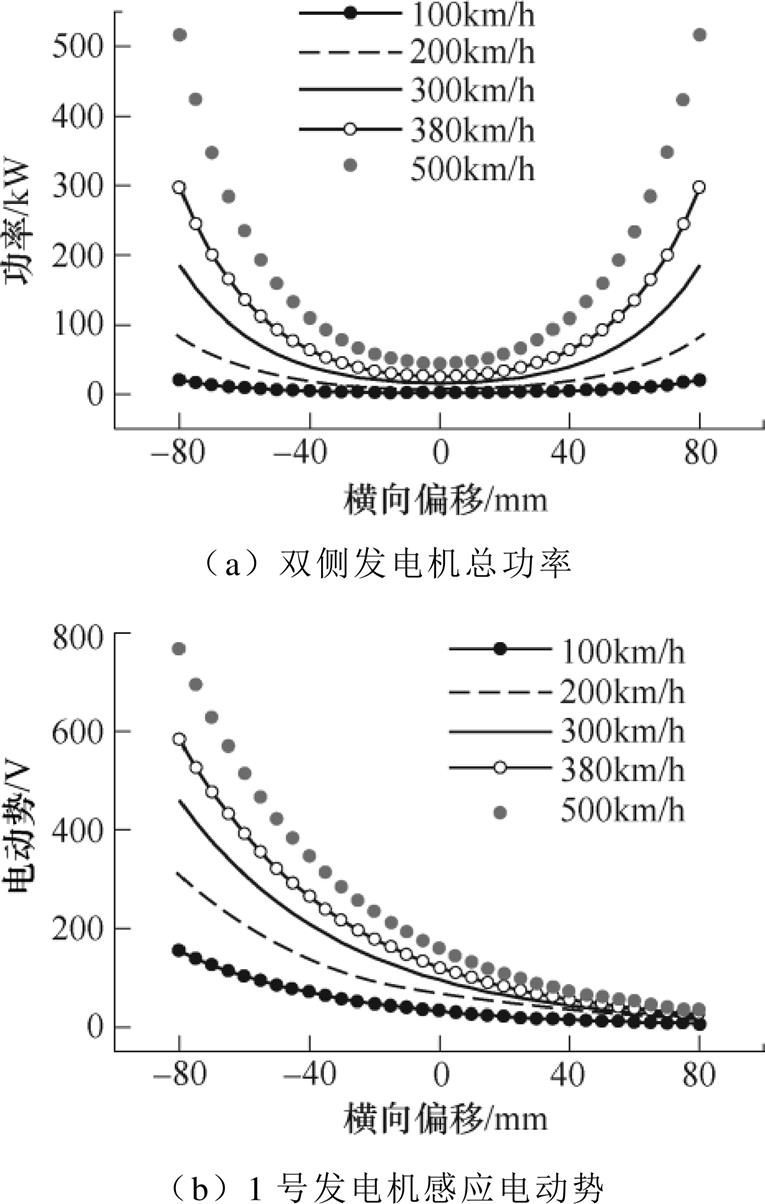
图9 功率、感应电动势与横向位移的关系
Fig.9 Power, inductive electromotive force and Dy
针对多工况下电动悬浮系统直线发电机,建立了电磁解析模型,获得了该工况下直线发电机的输出特性,通过与山梨线试验数据对比,验证了模型有效性。计算结果表明,直线发电机功率与感应电动势随着垂向偏移的增大而减小。而两侧直线发电机总功率随着横向偏移的增大而增大。本文的工作在衡量高速磁悬浮列车的偏移工况对直线发电机的输出特性的影响时具有指导意义,为高速磁悬浮系统直线发电机的设计和控制提供了相关理论基础。
参考文献
[1] 熊嘉阳, 沈志云. 中国高速铁路的崛起和今后的发展[J]. 交通运输工程学报, 2021, 21(5): 6-29.
Xiong Jiayang, Shen Zhiyun. Rise and future develop- ment of Chinese high-speed railway[J]. Journal of Traffic and Transportation Engineering, 2021, 21(5): 6-29.
[2] 吕刚. 直线电机在轨道交通中的应用与关键技术综述[J]. 中国电机工程学报, 2020, 40(17): 5665-5675.
Lü Gang. Review of the application and key tech- nology in the linear motor for the rail transit[J]. Proceedings of the CSEE, 2020, 40(17): 5665-5675.
[3] 朱进权, 葛琼璇, 孙鹏琨, 等. 高速磁悬浮列车在双端供电模式下的电流控制策略[J]. 电工技术学报, 2021, 36(23): 4937-4947.
Zhu Jinquan, Ge Qiongxuan, Sun Pengkun, et al. Current control strategy for high-speed maglev in the double feeding mode[J]. Transactions of China Electrotechnical Society, 2021, 36(23): 4937-4947.
[4] 郭亮, 卢琴芬, 叶云岳. 磁浮列车用直线发电机感应电动势的分析计算[J]. 电工技术学报, 2005, 20(11): 1-5.
Guo Liang, Lu Qinfen, Ye Yunyue. Analysis and calculation of the linear generator EMF in maglev[J]. Transactions of China Electrotechnical Society, 2005, 20(11): 1-5.
[5] Andriollo M, Martinelli C, Morini A, et al. Opti- mization of the on-board linear generator in EMS- MAGLEV trains[J]. IEEE Transactions on Magnetics, 1997, 33(5): 4224-4226.
[6] Kashiwagi T, Murai T, Yamamoto T, et al. Control of the output power and power factor in a converter of a linear generator for the maglev system[J]. IEEJ Transactions on Industry Applications, 2004, 124(10): 1029-1035.
[7] Murai T, Sakamoto Y, Hasegawa H. High power factor converter control by instantaneous single-phase current for a maglev system linear generator[C]// Power Conversion Conference-Nagoya, Nagoya, Japan, 2007: 1158-1163.
[8] Sakamoto Y, Murai T, Kashiwagi T, et al. The development of linear generator system combined with magnetic damping function[J]. IEEJ Transa- ctions on Industry Applications, 2006, 126(2): 192-198.
[9] Murai T, Hasegawa H, Fujiwara S. Improvement of inductive power collection in null-flux maglev system[J]. Electrical Engineering in Japan, 1998, 122(2): 48-60.
[10] Yamamoto T, Murai T, Hasegawa H, et al. Develop- ment of distributed-type linear generator with damping control[J]. Quarterly Report of RTRI, 2000, 41(2): 83-88.
[11] Murai T, Sakamoto Y. Sensor-less combined vertical and lateral magnetic damper by using linear gener- ator[J]. IEEJ Transactions on Industry Applications, 2006, 126(3): 269-275.
[12] 王一宇, 蔡尧, 宋旭亮, 等. 零磁通式电动悬浮等效模拟系统的特性分析与实验[J]. 电工技术学报, 2021, 36(8): 1628-1635.
Wang Yiyu, Cai Yao, Song Xuliang, et al. Charac- teristic analysis and experiment of the equivalent simulation system for null-flux electrodynamic suspension[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1628-1635.
[13] Lü Gang, Liu Yaqing, Zhou Tong, et al. Analysis of suspension and guidance system of EDS maglev based on a novel magnetomotive force model[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2022, 10(3): 2923-2933.
[14] Lü Gang, Liu Yaqing, Zhang Zhixuan, et al. Numerical analysis of the rotational magnetic springs for EDS maglev train[J]. CES Transactions on Elec- trical Machines and Systems, 2022, 6(1): 60-66.
[15] 章九鼎, 卢琴芬. 长定子直线同步电机齿槽效应的计算与影响[J]. 电工技术学报, 2021, 36(5): 964-972, 1026.
Zhang Jiuding, Lu Qinfen. Calculation and influences of cogging effects in long-stator linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 964-972, 1026.
[16] 秦伟, 范瑜, 徐洪泽, 等. 高温超导运动磁场电磁Halbach初级结构直线感应磁悬浮电机[J]. 电工技术学报, 2018, 33(23): 5427-5434.
Qin Wei, Fan Yu, Xu Hongze, et al. A linear induction maglev motor with HTS traveling magnetic electromagnetic halbach array[J]. Transactions of China Electrotechnical Society, 2018, 33(23): 5427- 5434.
[17] Murai T, Hasegawa H, Yamamoto T, et al. Active magnetic damper using linear generator[J]. IEEJ Transactions on Industry Applications, 1999, 119(11): 1371-1376.
[18] 李征, 邱书恒, 陈飞雪, 等. 基于预测算法的自由活塞内燃直线发电机高效控制策略[J]. 电工技术学报, 2022, 37(增刊1): 43-49.
Li Zheng, Qiu Shuheng, Chen Feixue, et al. Efficient control strategy based on predictive algorithm for free piston linear generator[J]. Transactions of China Electrotechnical Society, 2022, 37(S1): 43-49.
[19] 刘娜, 谭亦旻, 莫伟强, 等. 基于模拟退火算法的Halbach直线发电机优化设计[J]. 电工技术学报, 2021, 36(6): 1210-1218.
Liu Na, Tan Yimin, Mo Weiqiang, et al. Optimization design of halbach linear generator with simulated annealing algorithm[J]. Transactions of China Elec- trotechnical Society, 2021, 36(6): 1210-1218.
Abstract The Linear generator is the key equipment for contactless on-board power supply in the high-speed maglev system, and its output characteristics under multiple working conditions are the leading indicators of power generation capacity. The three-dimensional magnetic flux of the superconducting magnet is characterized by the space harmonic method, and the magnetomotive force distribution model of the linear generator is established. By analyzing the electromagnetic coupling relationship between the superconducting magnet and the suspension coil of the track-side wall, the expressions of the suspension coil current and the magnetic flux density of the suspension coil harmonic magnetic field are obtained. Further, the harmonic magnetic field of the suspension coil is used as the current collector coil to excite, and the numeric analytical expression for the induced electromotive force of the linear generator under multiple working conditions is deduced. Finally, compared with the test data of the Yamanashi Line in Japan, the accuracy of the magnetomotive force distribution model and the electromagnetic analytical model is verified. This work provides a theoretical basis for designing and controlling of linear generators for high-speed maglev systems.
Keywords:High-speed maglev system, linear generator, electromagnetic analytical model, multi- condition, induced electromotive force
中图分类号:TM359.4
DOI: 10.19595/j.cnki.1000-6753.tces.220464
国家自然科学基金资助项目(52077003, 51777009)。
收稿日期 2022-03-29
改稿日期 2022-06-28
E-mail: ganglv@bjtu.edu.cn(通信作者)
郭曦临 男,1998年生,硕士研究生,研究方向为电动悬浮系统直线发电机。
E-mail: 20121438@bjtu.edu.cn
(编辑 崔文静)