 (1)
(1)摘要 多年来,感应电机无速度传感器矢量控制系统在低同步转速区域的不稳定问题一直没有得到解决。该不稳定问题由系统状态变量不能观、极点分布不稳定以及电机参数鲁棒性弱共同导致。当且仅当三个问题被同时解决时,低同步转速区域的不稳定问题才能够得到解决。该文以经典的闭环磁链观测器为基础,采用虚拟电压注入法改进其低速稳定性。与传统高频/低频信号注入法不同,虚拟电压注入法不在电机中注入信号,而是在观测器中注入虚拟电压。虚拟电压注入能同时解决系统状态变量能观性、极点分布稳定性和电机参数鲁棒性问题,最终实现系统在低同步转速区域的稳定运行。
关键词:感应电机 无速度传感器 闭环磁链观测器 虚拟电压注入
近年来,感应电机无速度传感器矢量控制系统,因其成本低、可靠性高、维护简易等优势,成为国内外电气传动领域研究的焦点,在工业上得到广泛应用。但低速区域下,尤其是接近零同步转速时,系统的不稳定问题限制了驱动系统的运行范围以及应用场合。针对这一问题,国内外学者们提出了许多改进方法。这些方法一般可以分为两类。
(1)基于电机各向异性的信号提取法。这类方法利用转子齿槽谐波、互感的饱和特性、人造凸极性或转子漏抗,通过向电机注入信号,提取转子转速和位置信息[1]。文献[2]基于高频信号注入法,利用同步滤波器提取转子位置信息。同时提出了一种新型的扰动辨识方法,无需离线预处理,实现转子转速在线辨识。文献[3]引入额外的电流传感器测量感应电机零序电流,通过零序电流的变化反映电机漏感的变化,并提取出转子位置信息,估计电机转速。文献[4]基于脉振电压注入法,提出新型的信号分离方法,获取精确的齿槽凸极性信息,从而可以获得精确的转子转速。通过上述信号提取法,无速度传感器矢量控制系统可以在低速甚至零同步转速下稳定长时间运行。但感应电机各向异性较弱,难以通过简易高效的方法提取转子转速和磁链定向信息。因此,信号提取法不适用于工业应用(但这种方法在永磁电机[5-8]和同步磁阻电机[9]的无速度传感器系统中很常见)。
(2)基于感应电机基波数学模型的基波模型法。相较于信号提取法,基波模型法通用性强,在工业中应用广泛。文献[10]改进了传统全阶磁链观测器,自适应地调整反馈矩阵系数,提高了低速发电模式下,系统的稳定性和转速估计精度。基于传统的转子磁链误差模型参考自适应系统(Model Reference Adaptive System, MRAS),文献[11]提出了一种自适应线性神经元速度观测器,利用神经网络自适应修改转速自适应律权重系数,保证了系统的低速起动稳定性。文献[12]提出了一种基于感应电机反电动势的高阶滑模观测器,提高了观测器的参数鲁棒性,同时削弱了系统抖振。文献[13]提出了一种基于改进指数趋近律的滑模观测器,进一步削弱了系统抖振,并实现了对系统状态的自适应控制。文献[14]基于对称强跟踪扩展卡尔曼滤波器进行转子转速辨识,提高了转速估计精度和跟踪速度,并对噪声进行抑制。文献[15]在传统的转子磁链误差MRAS的基础上,提出了闭环磁链观测器(Closed-Loop Flux Observer, CLFO),解决了电压模型的纯积分问题,改善了系统的低速性能,但仍然存在低速运行不稳定问题。通过上述基波模型法,无速度传感器驱动系统在低速下的性能得到极大改善,不稳定区域减小,但是不稳定问题仍然存在。
本文对基于CLFO的感应电机无速度传感器矢量控制系统的低速不稳定问题进行了研究。分别利用非线性系统局部弱能观性理论[16]分析状态变量的能观性、利用小信号扰动理论分析矢量控制系统的极点稳定性和参数鲁棒性,得到了导致CLFO低速不稳定问题的原因。针对不稳定现象提出了虚拟电压注入法,能够同时解决转速能观性、系统极点稳定性和电机参数鲁棒性问题,进而实现CLFO系统在低速区域的稳定运行。
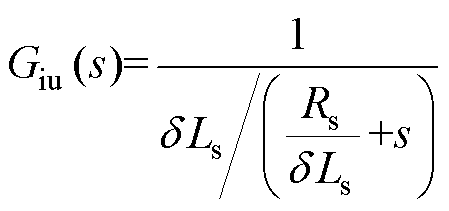
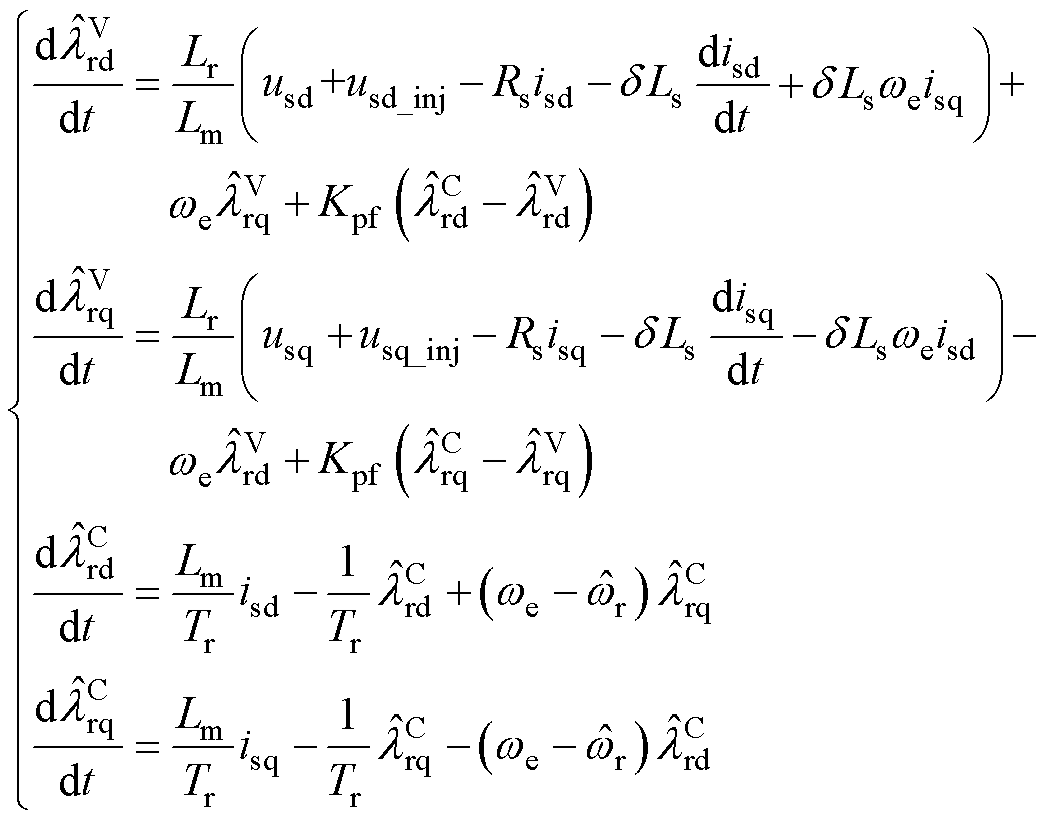
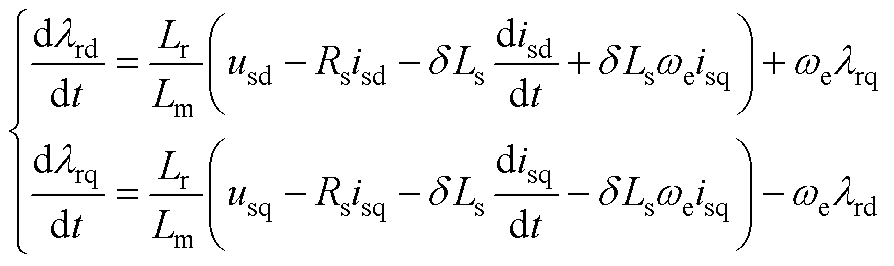
在dq两相旋转坐标系下,闭环磁链观测器数学模型为
(1)式中,usd和usq分别为定子电压矢量的d、q轴分量;isd和isq分别为定子电流矢量在d、q轴的分量;lrd和lrq分别为转子磁链在d、q轴的分量;wr为转子转速;we为同步转速;Rs为定子电阻;Rr为转子电阻; ,Ls为定子自感,Lr为转子自感,Lm为互感;Tr为转子时间常数;Kpf为CLFO闭环反馈系数,解决电压模型纯积分问题;上角标“C”和“V”分别为电流模型和电压模型;标识符“
,Ls为定子自感,Lr为转子自感,Lm为互感;Tr为转子时间常数;Kpf为CLFO闭环反馈系数,解决电压模型纯积分问题;上角标“C”和“V”分别为电流模型和电压模型;标识符“ ”为观测变量。
”为观测变量。
转速观测器自适应律为
 (2)
(2)式中,KPE与KIE分别为转速自适应律PI参数。
基于电机基波模型构建的观测器,均具有低同步转速区域的不稳定问题[17]。该问题由转速能观性、系统极点稳定性和电机参数鲁棒性问题共同导致。
基于CLFO构建的感应电机无速度传感器矢量控制系统同样具有低同步转速区域的不稳定问题[15],本文将分别对CLFO系统的转速能观性、系统极点稳定性以及对电机参数鲁棒性进行分析,从而归纳出低速不稳定问题的原因。
本文将利用非线性系统的局部弱能观理论[16]对观测器的能观性进行分析。非线性系统的局部弱能观理论描述如下。
假定一个非线性动态系统∑为
 (3)
(3)式中, 为一个状态向量;
为一个状态向量; 为系统的输入向量;
为系统的输入向量; 为系统的输出向量;f和h为非线性函数。
为系统的输出向量;f和h为非线性函数。
假设 是状态空间中一点,令
是状态空间中一点,令
 (4)
(4) (5)
(5)
式中, 为函数h对应于向量场f的k阶李导数,即
为函数h对应于向量场f的k阶李导数,即 ,
,  。
。
如果矩阵J满秩,即
 (6)
(6)则系统 的状态变量在x0点处局部弱能观。
的状态变量在x0点处局部弱能观。
根据非线性系统的局部弱能性理论和式(1),得到基于CLFO的非线性动态系统∑为
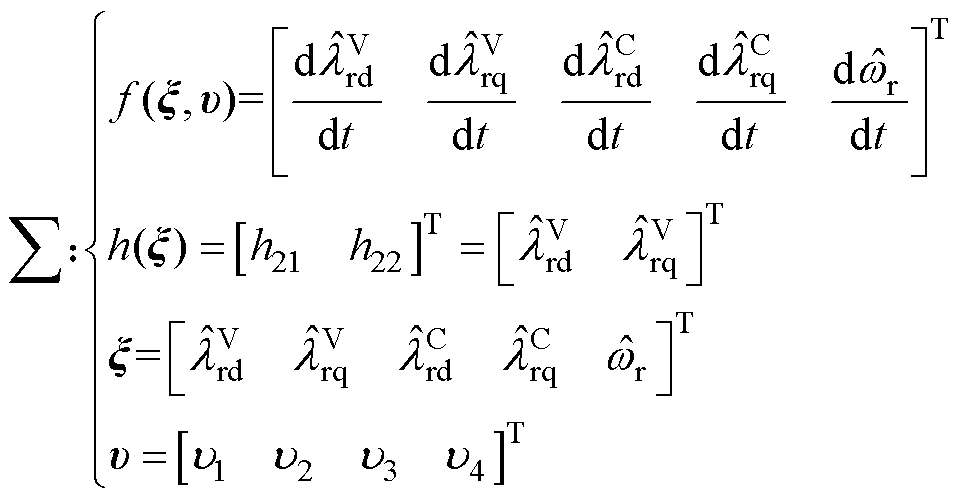 (7)
(7)其中



由式(4)和式(5)可以得到非线性系统的判定矩阵J为
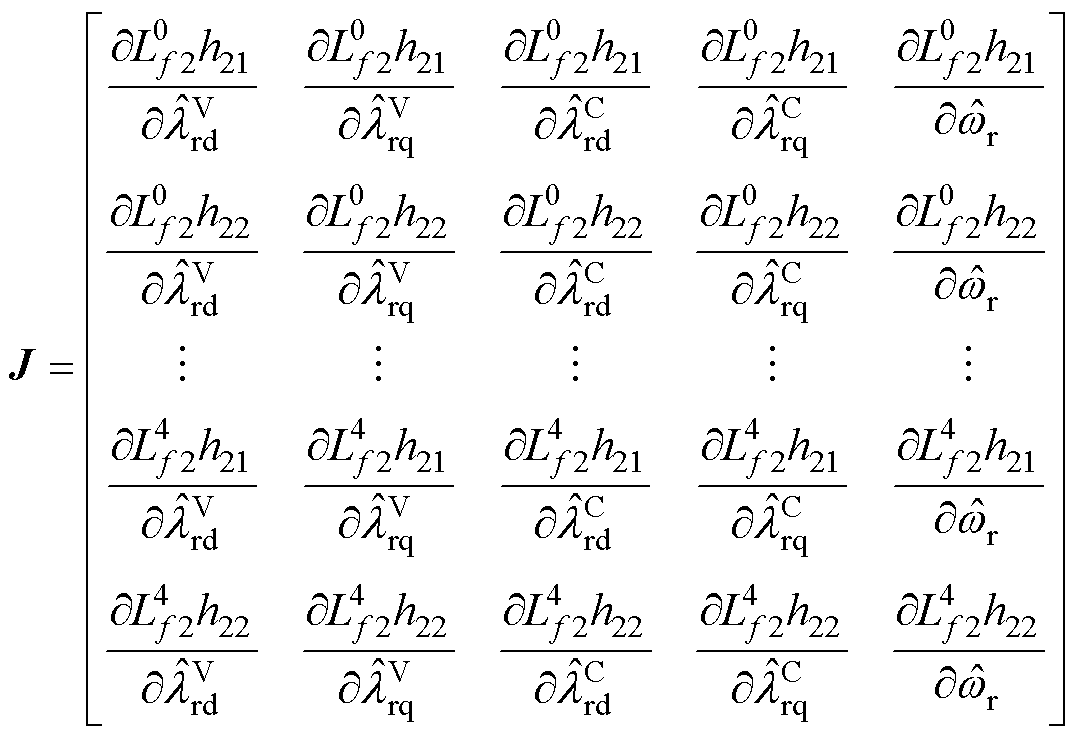 (8)
(8)式(8)为10×5矩阵。根据局部弱能观性理论[16],当且仅当J满秩时,系统∑中的状态变量具有局部弱能观性。因此提取式(8)中前四行与第六行,得到矩阵J1为
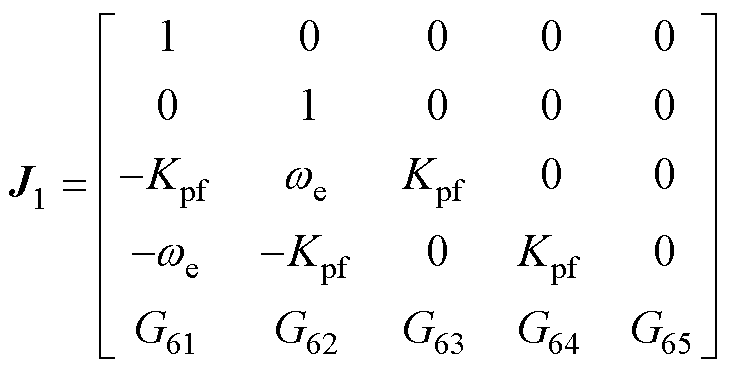 (9)
(9)
其中

由式(9)得J1的行列式D1为
 (10)
(10)即矩阵J1的秩为5,因此矩阵J满秩。根据局部弱能观性理论可知:基于CLFO构建的非线性系统∑中的状态变量在所有转速区域(包括we=0rad/s时),均具有局部弱能观性。
传统CLFO系统的传递函数框图如图1所示。图中,Te为感应电机电磁转矩,TL为负载转矩,J为转子转动惯量,B为转子摩擦因数。
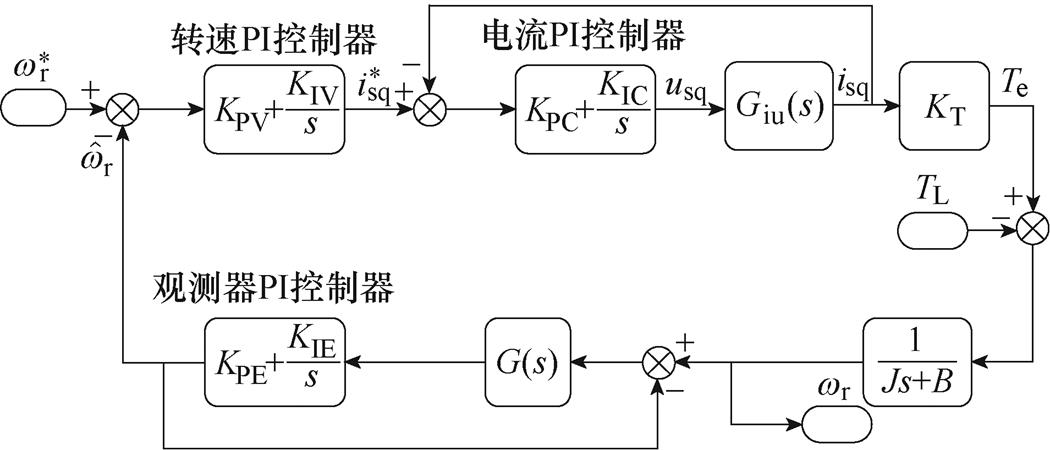
图1 传统CLFO系统的传递函数框图
Fig.1 Transfer function diagram of traditional CLFO
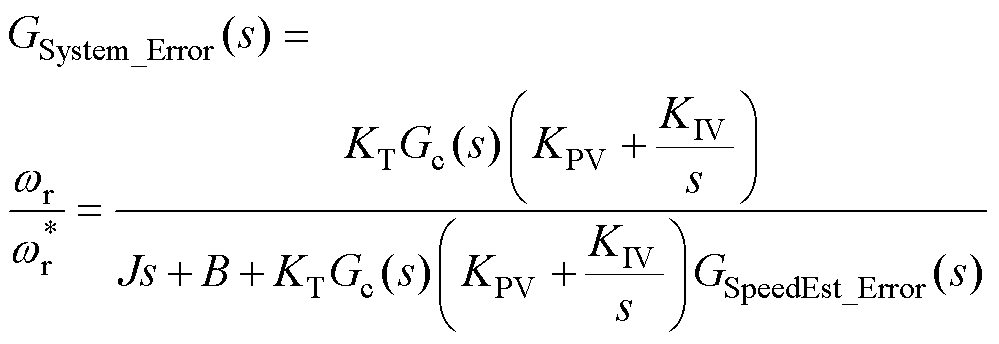
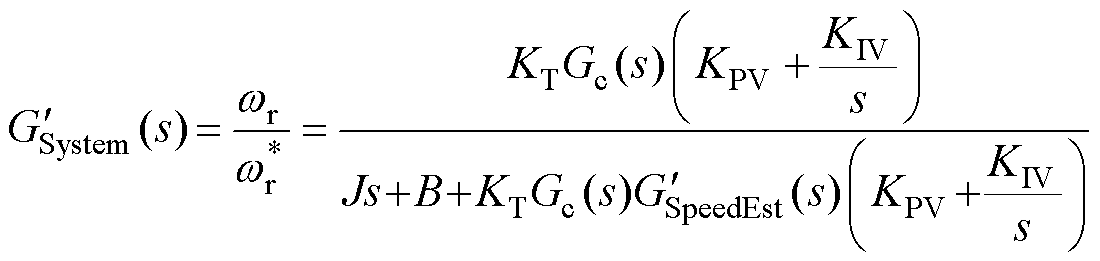
由图1可得转子实际转速 与参考转速
与参考转速 的传递函数为
的传递函数为
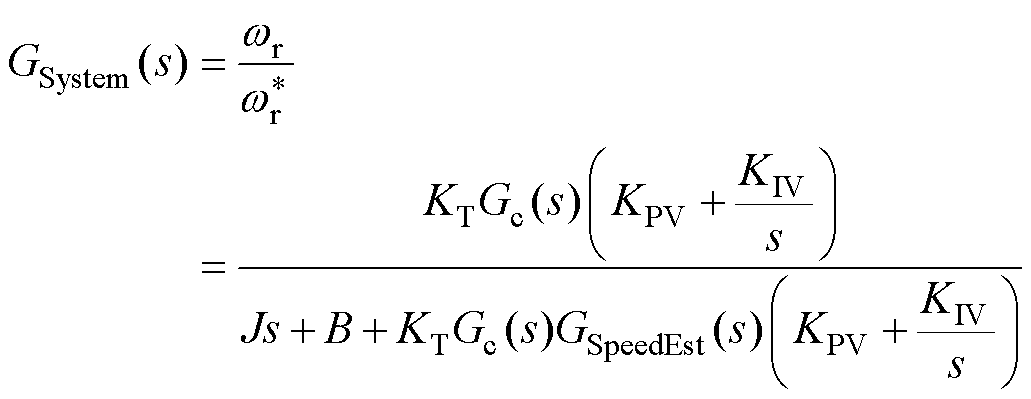 (11)
(11)其中

式中,KPV与KIV分别为转速PI控制器PI参数;KPC与KIC分别为电流PI控制器PI参数;p为电机极 对数。
根据式(11)可以得到传统CLFO系统的闭环传递函数的极点分布,如图2所示。系统在低速发电模式下,存在右半平面极点(-1.4p<we<0 ,该区间内系统不稳定。传统CLFO系统在低同步转速下存在极点不稳定问题。
,该区间内系统不稳定。传统CLFO系统在低同步转速下存在极点不稳定问题。
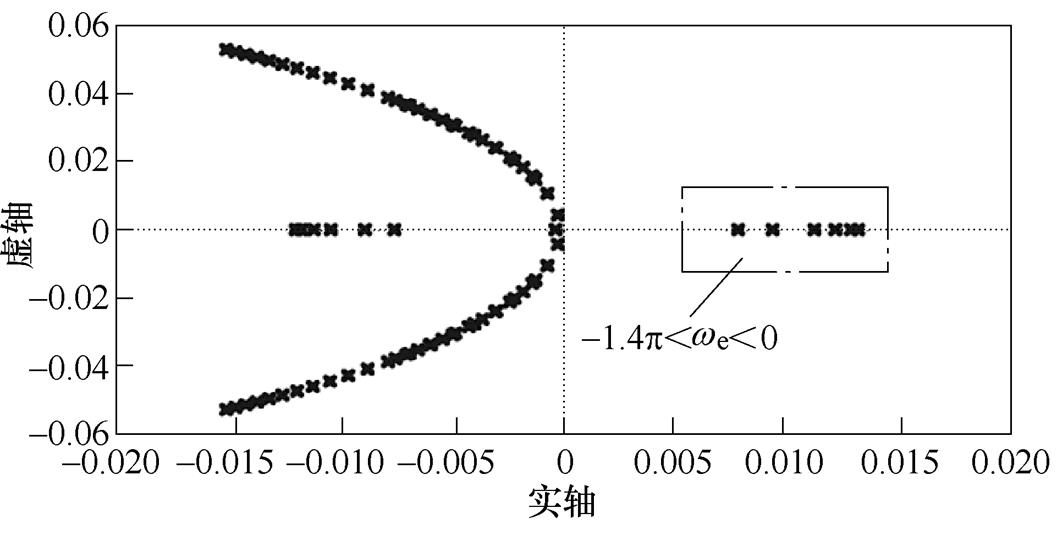
图2 传统CLFO系统的极点分布
Fig.2 Pole distribution of traditional CLFO system
根据式(11)可以得到电机参数(定子电阻、转子电阻、互感)变化时的转子实际转速与参考转速的传递函数为
 (12)
(12)其中



根据式(12)可以得到,当电机参数发生变化时,传统CLFO系统的极点分布,如图3所示。
由图3可知,当电机参数不准确时,系统闭环传递函数在低同步转速区间存在右半平面极点,系统参数鲁棒性弱,系统不能稳定运行。在实际工业应用中,电机参数很难精确获得,并且电机参数随着电机运行时间的增加会发生漂移。系统参数鲁棒性弱,也是导致系统低速不稳定问题的原因之一。
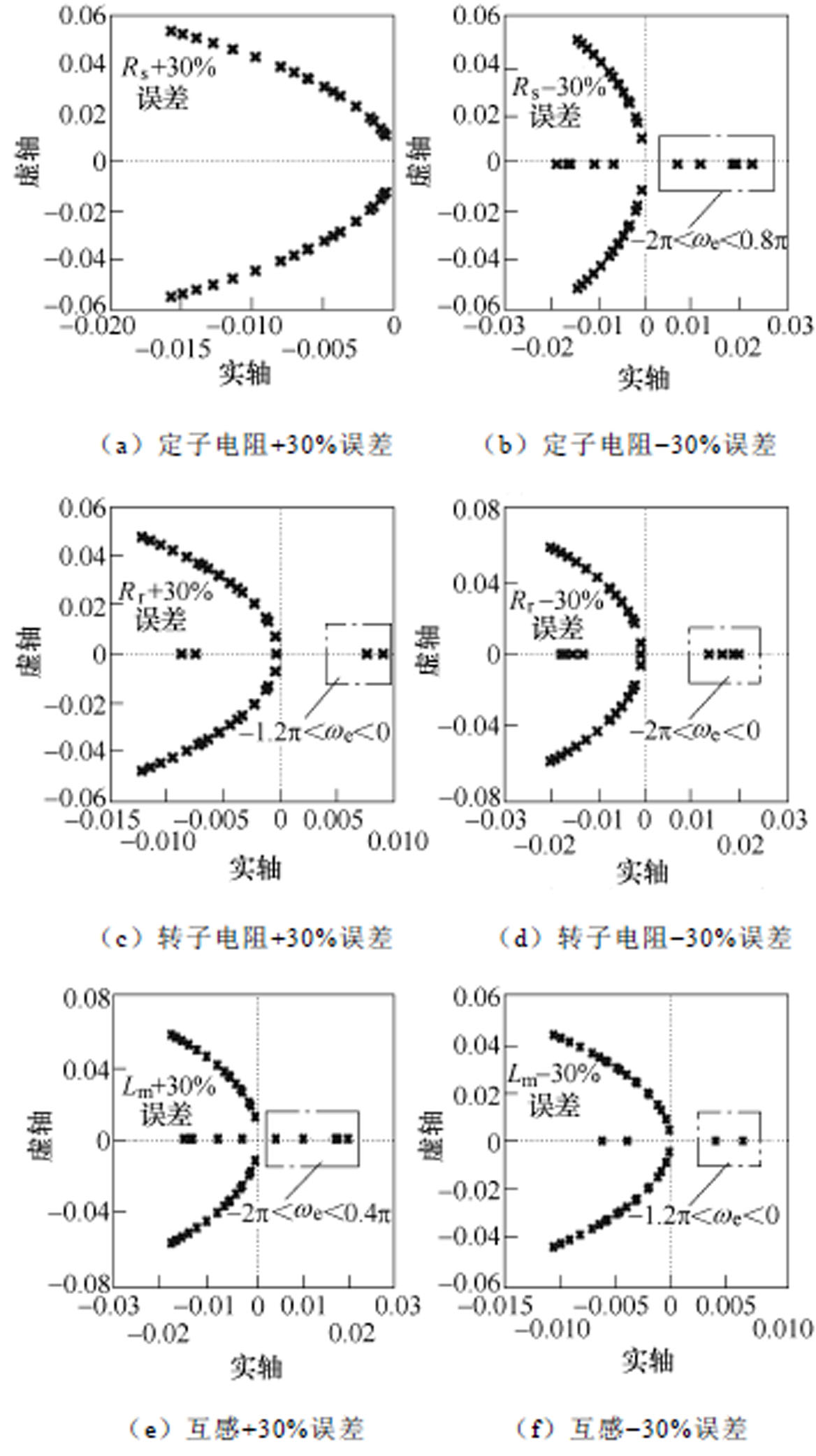
图3 电机参数变化时,传统CLFO系统的极点分布
Fig.3 Pole distribution of traditional CLFO system, with motor parameter deviation
综上所述,虽然CLFO中的状态变量在任何转速区间均具有局部弱能观性,但由于系统极点不稳定且参数鲁棒性弱,基于CLFO构建的无速度传感器矢量控制系统存在低速不稳定问题。
由于感应电机的各向异性很弱,利用传统的高频或低频信号注入法很难提取有效的位置或转速信息,因此传统信号注入法很少应用在感应电机中。与传统信号注入法相比,虚拟电压注入法仅在观测器中注入额外的电压信号(不需要在电机中注入),就能够同时解决系统极点不稳定问题和对电机参数鲁棒性问题,并且能够提升闭环观测器中状态变量的观测度(即量化了的能观性),进而解决传统的CLFO系统的不稳定问题。
基于虚拟电压注入的CLFO系统结构框图如图4所示。
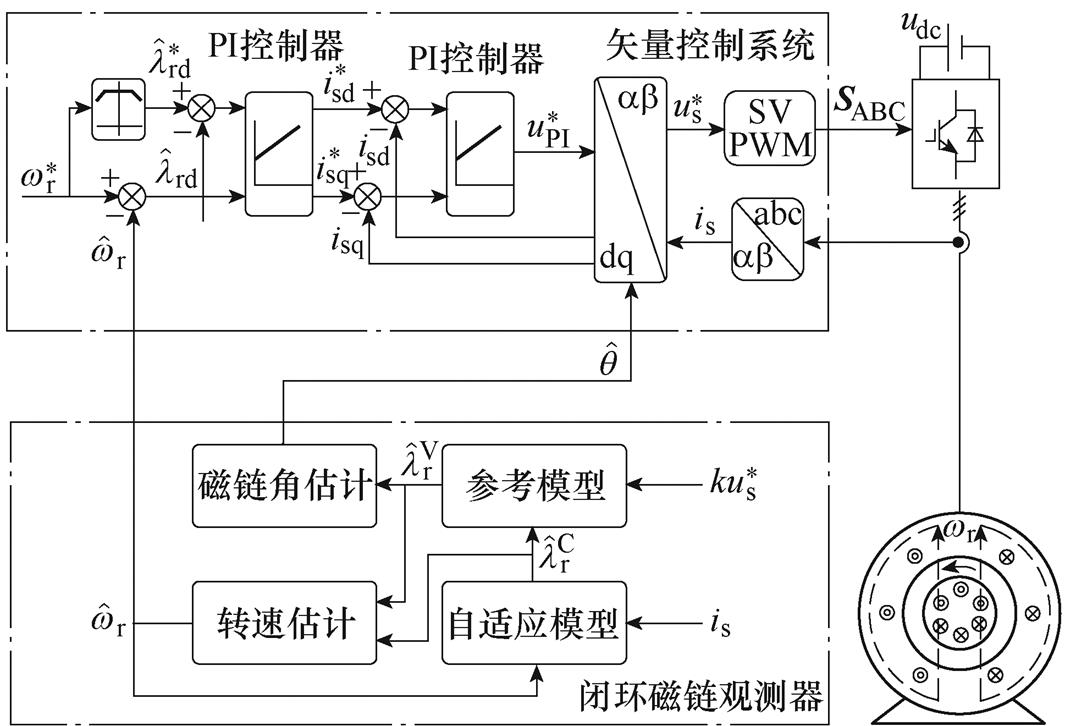
图4 基于虚拟电压注入的CLFO系统结构框图
Fig.4 Structure diagram of CLFO system based on virtual voltage injection
观测器数学模型为
 (13)
(13)式中,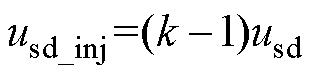 、
、 为观测器中注入的虚拟电压,k为注入系数,且k>1。
为观测器中注入的虚拟电压,k为注入系数,且k>1。
利用非线性系统的局部弱能观性理论对基于虚拟电压的观测器进行能观性分析,可得相对应的能观性判定方阵 为
为
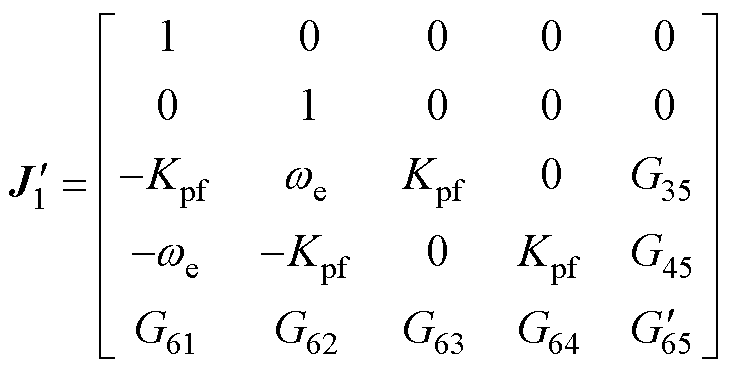 (14)
(14)其中

根据式(14)得矩阵的行列式 为
为
 (15)
(15)
由式(15)可以得到,当注入虚拟电压后,矩阵 的秩同样为5,因此根据局部弱能观性理论可知,基于虚拟电压注入的CLFO中的状态变量在所有转速区域(包括we=0rad/s时),均具有局部弱能观性。
的秩同样为5,因此根据局部弱能观性理论可知,基于虚拟电压注入的CLFO中的状态变量在所有转速区域(包括we=0rad/s时),均具有局部弱能观性。
特别地,由附录中式(A11)可得,当 时
时
 (16)
(16)由式(15)和式(16)推导可得,此时的行列式 为
为
 (17)
(17)
虽然虚拟电压注入前后,CLFO的状态变量均具有局部弱能观性,但引入虚拟电压后,观测器的能观度(能观性的定量描述)增强了。
本文将文献[18]中的能观性结论进行了扩展,得到系统能观性的定量化描述。且当
 (18)
(18)越大时,系统能观度越大,系统稳定区域越大,观测器抗干扰能力越强[18]。
未注入虚拟电压的CLFO能观度如式(18)所示,注入虚拟电压后,CLFO能观度为
 (19)
(19)根据式(10)和式(17)可得
 (20)
(20)
因此,当注入虚拟电压后,系统的能观度增大,系统在零同步转速下的局部弱能观性得到增强。
引入虚拟电压注入时,CLFO系统的传递函数框图如图5所示。
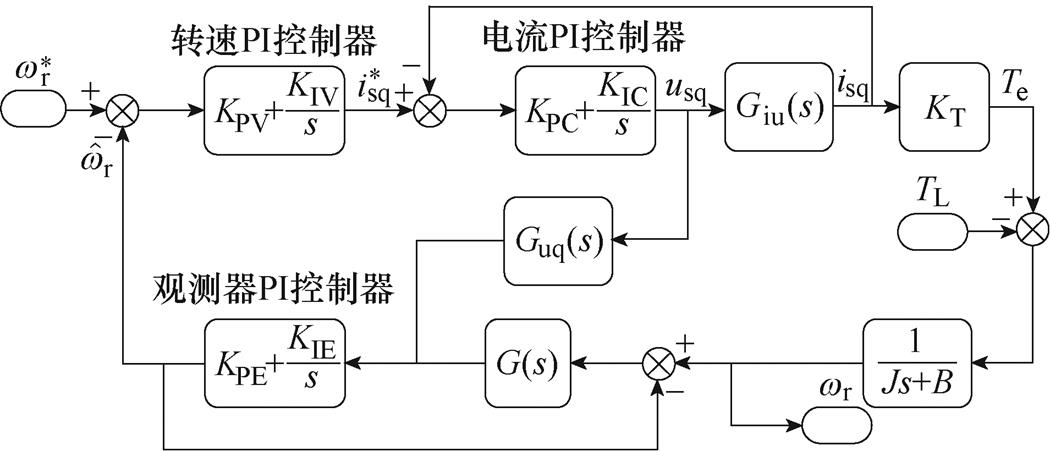
图5 基于虚拟电压注入的CLFO系统的传递函数框图
Fig.5 Transfer function diagram of CLFO system based on virtual voltage injection
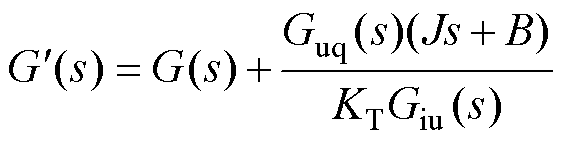
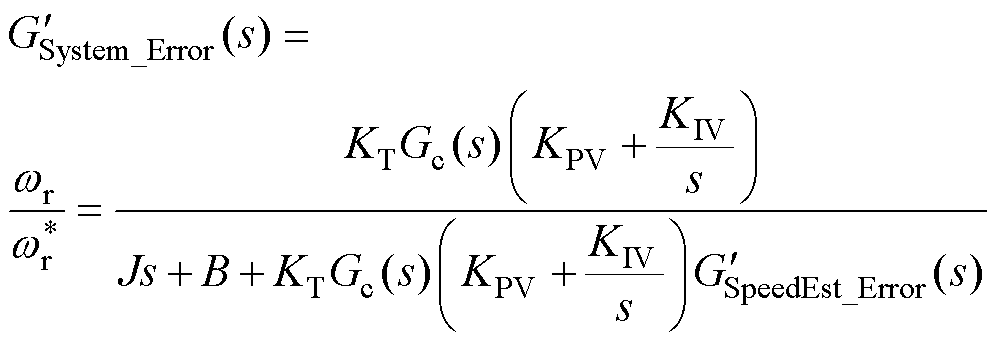
由图5可得引入虚拟电压注入时转子实际转速与参考转速的传递函数为
 (21)
(21)其中

根据式(21)可以得到基于虚拟电压注入的CLFO系统的闭环传递函数极点分布,如图6所示。图中,注入系数k=1.5,相比图2中的极点分布,在图6中系统不存在右半平面极点,极点不稳定问题得到解决。
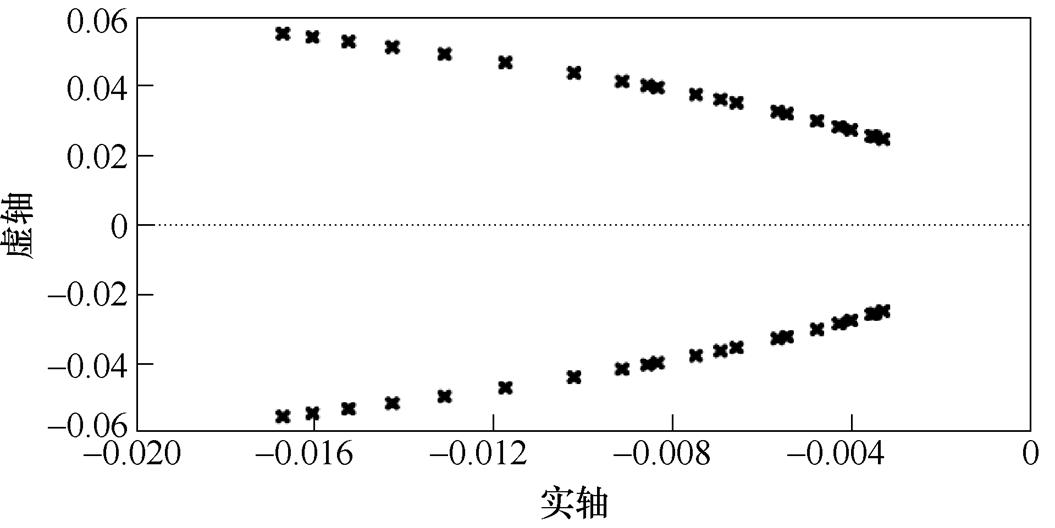
图6 基于虚拟电压注入的CLFO系统的极点分布,k=1.5
Fig.6 Pole distribution of CLFO system based on virtual voltage injection, k=1.5
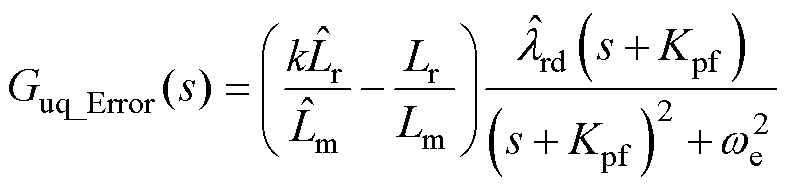
引入虚拟电压后,同样地,根据式(21)可以得到电机参数(定子电阻、转子电阻、互感)变化时的转子实际转速与参考转速的传递函数为
 (22)
(22)其中


根据式(22)可以得到,当电机参数变化时,系统的闭环传递函数极点分布,如图7所示。注入系数k=1.5。相比图3中的极点分布,系统在低同步转速下,不存在不稳定极点,系统始终保持稳定。
通过以上分析可知,基于CLFO的无速度传感器矢量控制系统在低同步转速下的不稳定问题,可通过虚拟电压注入解决。虚拟电压注入对CLFO系统的性能改进见表1。
虚拟电压注入增强了系统的转速能观性,解决了低速下系统极点的不稳定问题与对电机参数变化的鲁棒性弱的问题,进而实现了系统在低同步转速下(包括零同步转速)的稳定运行。
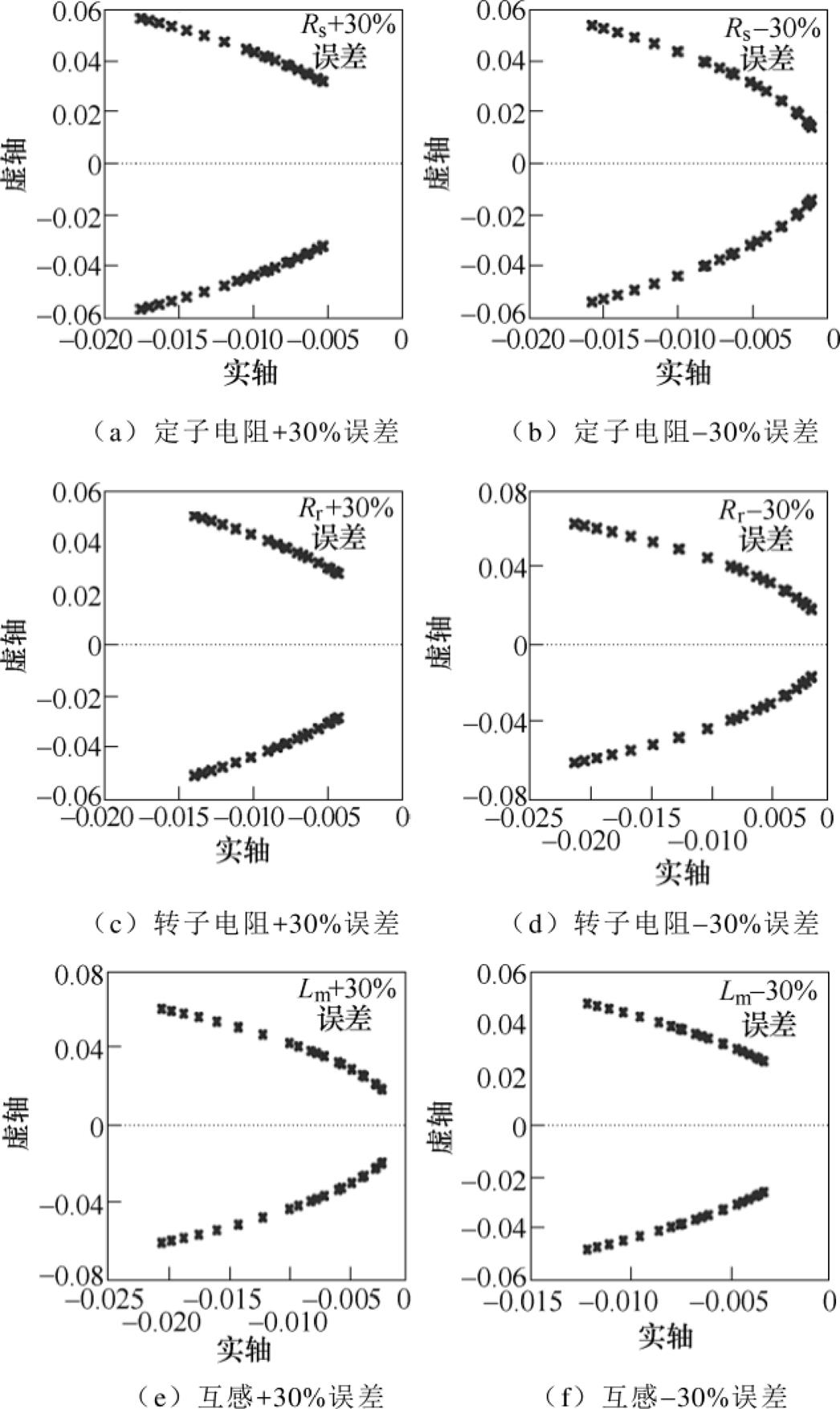
图7 电机参数变化时,基于虚拟电压注入的 CLFO系统的极点分布,k=1.5
Fig.7 Pole distribution of CLFO system based on virtual voltage injection, with motor parameter deviation, k=1.5
表1 虚拟电压注入对CLFO系统的性能改进
Tab.1 Performance improvement of virtual voltage injection for CLFO system

性能传统的 CLFO系统基于虚拟电压注入的CLFO系统 低速转速能观性√√(能观性增强) 低速极点稳定性×√ 低速参数鲁棒性×√
注:“√”表示性能理想;“×”表示性能不理想。
为验证虚拟电压的有效性,本文采用5.5kW的感应电机作为被测电机进行实验验证,5.5kW的内嵌式永磁同步电机(Interior Permanent Magnet Synchronous Motor, IPMSM)提供负载转矩。感应电机参数见表2。
表2 感应电机参数
Tab.2 Parameters of induction machine
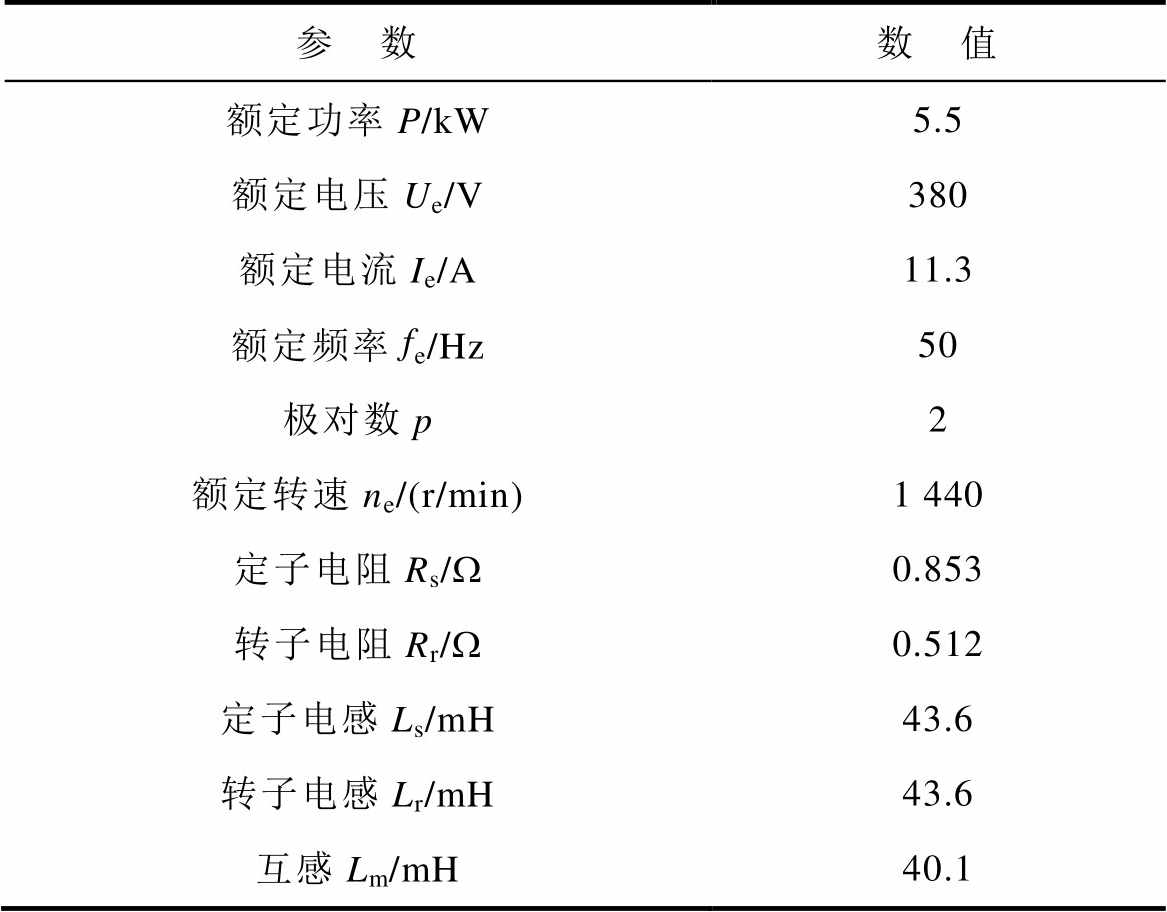
参 数数 值 额定功率P/kW5.5 额定电压Ue/V380 额定电流Ie/A11.3 额定频率fe/Hz50 极对数p2 额定转速ne/(r/min)1 440 定子电阻Rs/W0.853 转子电阻Rr/W0.512 定子电感Ls/mH43.6 转子电感Lr/mH43.6 互感Lm/mH40.1
为验证基于虚拟电压注入的CLFO系统的低速稳定性,施加100%额定负载转矩,给定转子参考转速从120r/min切换到-120r/min。当电机转速为正时,被测电机工作在电动模式;当电机转速为负时,被测电机工作在发电模式,实验结果如图8所示。
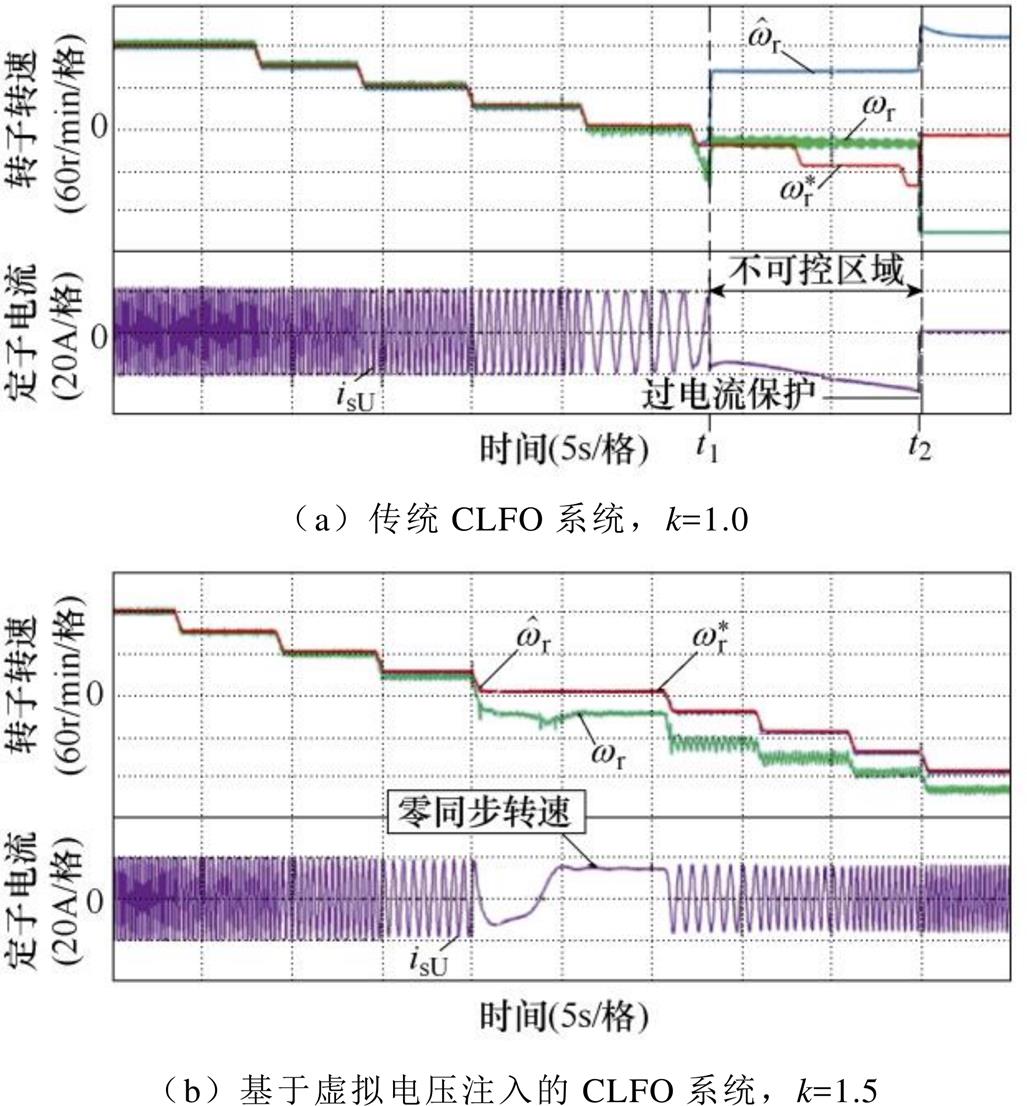
图8 100%额定负载转矩下的低速稳定性对比
Fig.8 Stability comparison in low speed region with 100% rated load torque
如图8a所示,传统CLFO系统在同步转速接近零时,尤其是发电模式下(t1~t2)会失去控制。实际转子转速 和估计转子转速
和估计转子转速 不能跟踪参考转速
不能跟踪参考转速 。在t2时刻,定子电流U相isU过大触发了变频器过电流保护。如图8b所示,当注入虚拟电压后(注入系数k=1.5),系统能够在低同步转速区域(包括零同步转速)保持稳定长时间运行,低速稳定性良好。
。在t2时刻,定子电流U相isU过大触发了变频器过电流保护。如图8b所示,当注入虚拟电压后(注入系数k=1.5),系统能够在低同步转速区域(包括零同步转速)保持稳定长时间运行,低速稳定性良好。
由图8b可知,CLFO被注入虚拟电压后,存在明显的转速误差。文献[19]详细分析了造成该误差的原因,并提出了相应的补偿方法。为了验证补偿算法的有效性,给定参考转速30r/min(因为该转速下传统CLFO系统不能稳定运行,而虚拟电压注入法能够保证系统稳定运行),负载由100%额定转矩逐渐降低为-100%额定转矩,被测电机由电动模式切换到发电模式,实验结果如图9所示。
从图9可见,虚拟电压所引起的转速估计误差,能够通过补偿得到消除。转速补偿前后,低速下不同负载转矩时的转速估计误差(参考转速减去实际转速)见表3。
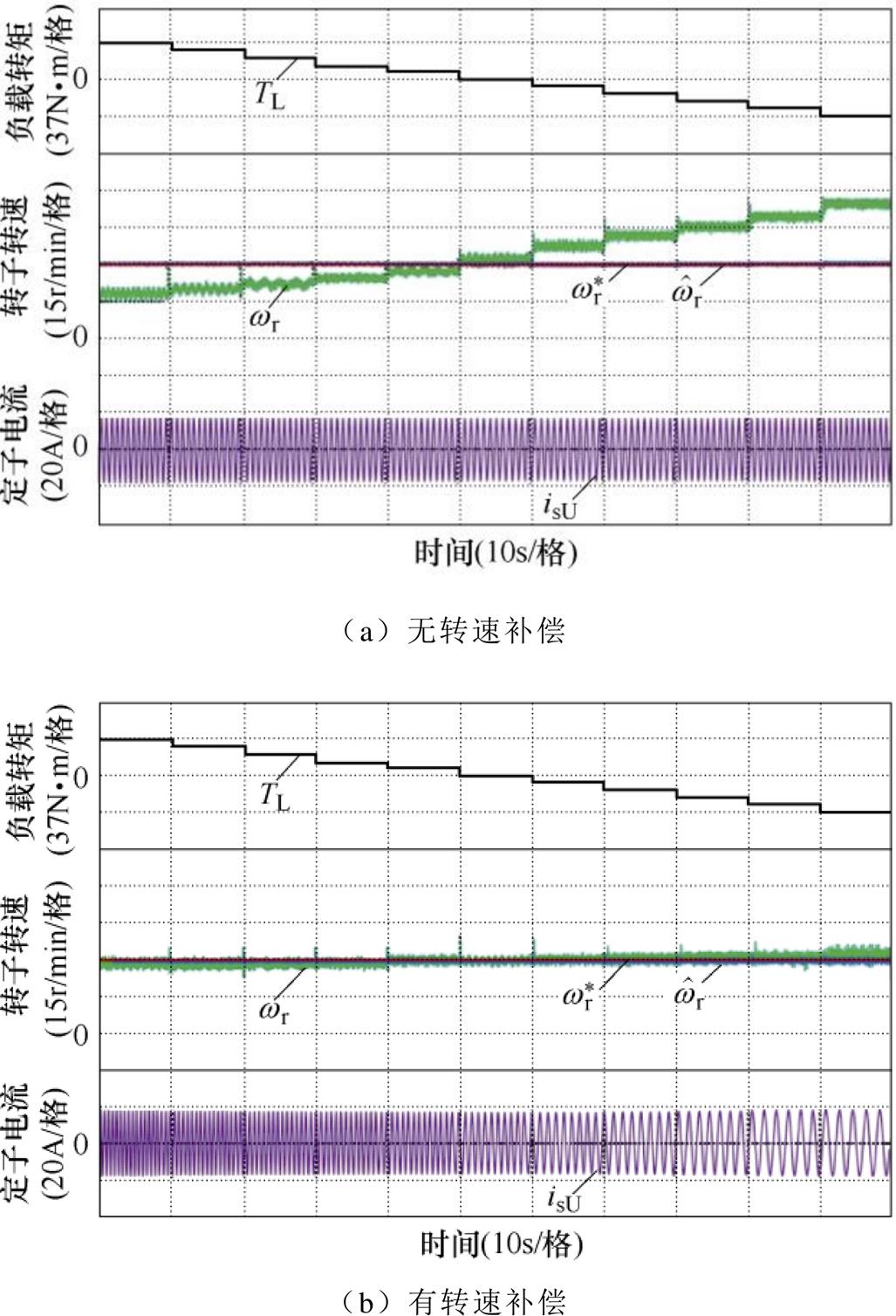
图9 不同负载转矩下的转子转速对比
Fig.9 Comparison of rotor speed with different load torque
表3 低速下不同负载转矩时的转速估计误差
Tab.3 Rotor speed estimation error with different load torque in low speed region
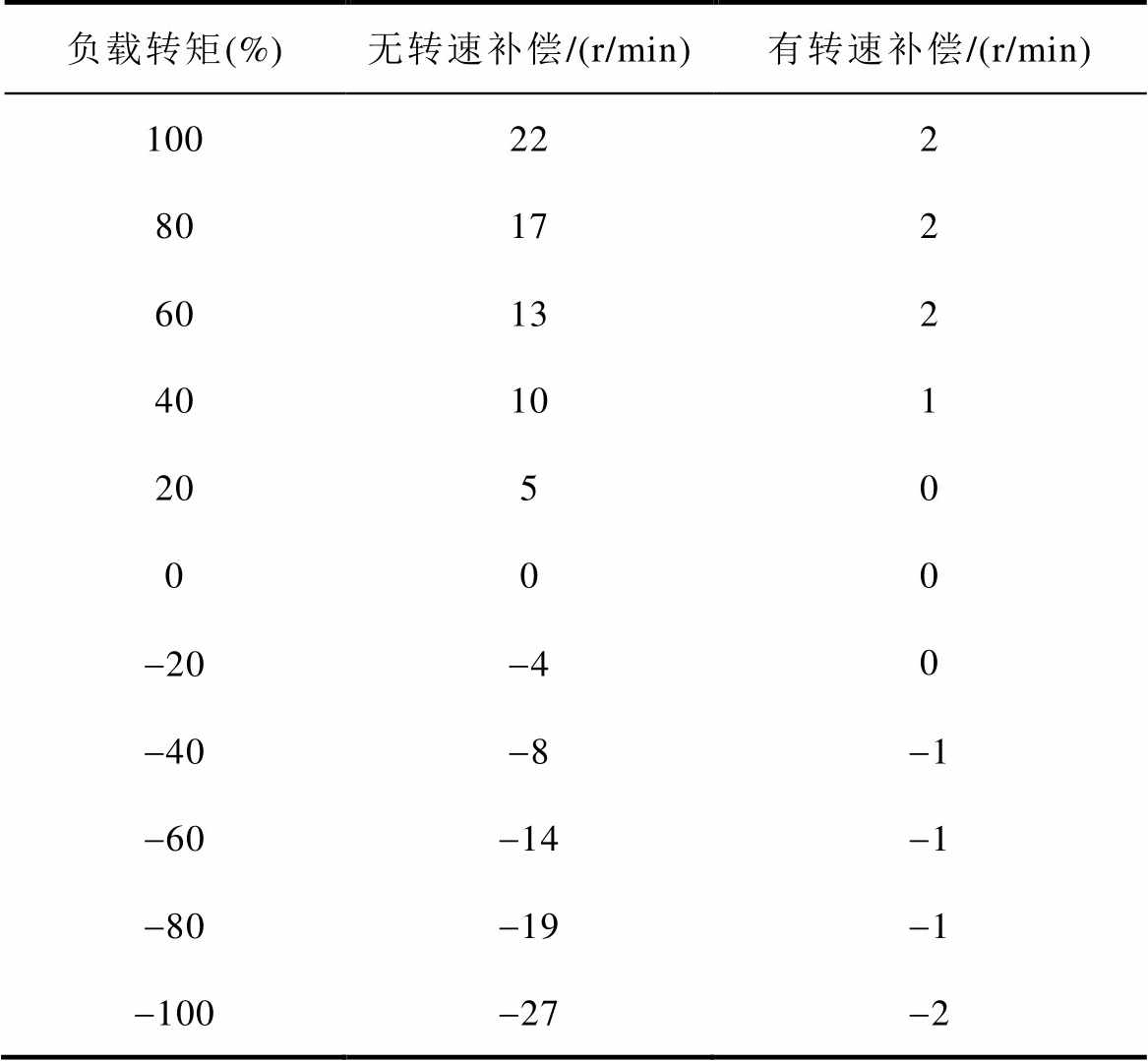
负载转矩(%)无转速补偿/(r/min)有转速补偿/(r/min) 100222 80172 60132 40101 2050 000 -20-40 -40-8-1 -60-14-1 -80-19-1 -100-27-2
为了验证虚拟电压注入对系统鲁棒性的改善,实验中参考转速从15r/min下降到0r/min,运行一段时间后,在黑色虚线处,观测器中的电机参数发生30%阶跃变化,随后参考转速再从0r/min上升到15r/min。在该过程中,被测电机负载转矩始终为-100%额定转矩,被测电机处于发电模式。实验结果如图10所示。
由图10可知,在低速发电模式下,参数变化前后,系统始终保持稳定,且能长时间稳定运行在零同步转速处。因此虚拟电压注入改善了传统CLFO系统的参数鲁棒性问题,解决了传统基波模型法的低速不稳定问题。
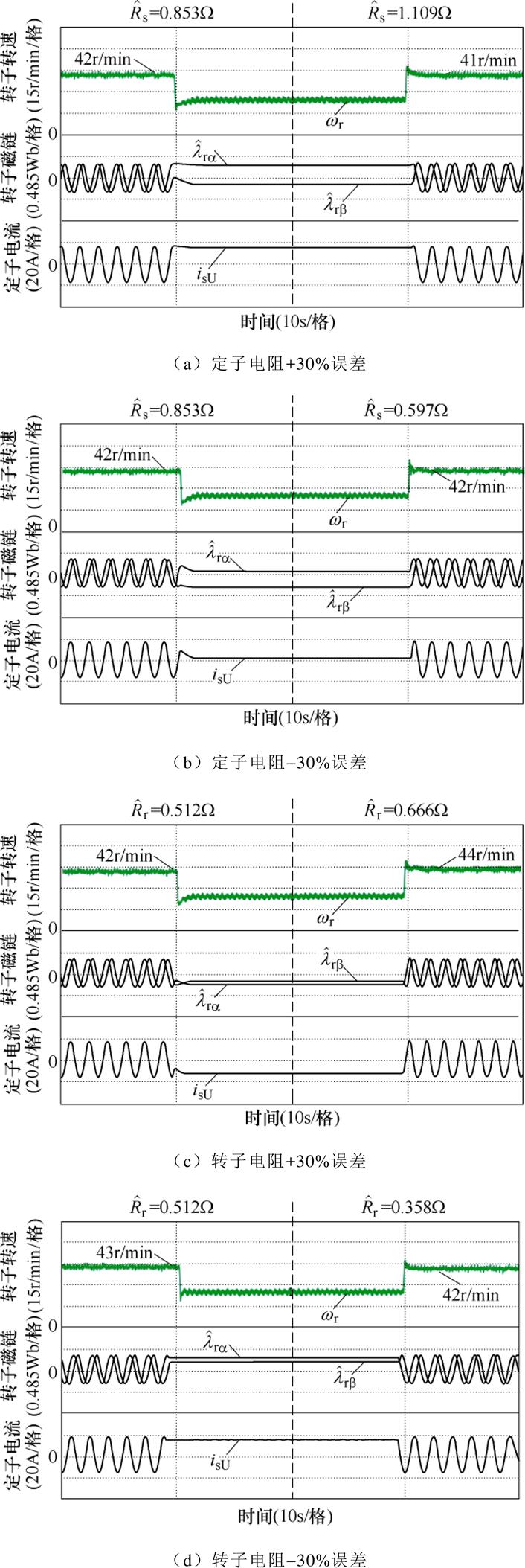

图10 100%负载下,采用虚拟电压注入的鲁棒性实验,k=1.5
Fig.10 Robustness experiments with 100% rated load, with virtual voltage injection, k=1.5
基于CLFO的感应电机无速度传感器矢量控制系统在低同步转速区间具有不稳定问题。本文针对引起不稳定问题的三个因素:状态变量能观性、系统极点稳定性以及电机参数鲁棒性进行了分析,得到了CLFO系统不稳定问题的原因。进一步地,通过虚拟电压注入法改善CLFO系统。虚拟电压注入法同时改善状态变量能观性、极点稳定性以及电机参数鲁棒性问题,进而解决了系统低同步转速区间的运行不稳定问题。对比实验结果,基于虚拟电压注入法的CLFO系统实现了低同步转速下的稳定长时间运行,且具有很强的参数鲁棒性。
附 录
为了分析虚拟电压注入对无速度传感器矢量控制系统的能观性改进,采用小信号扰动理论推导观测器的动态模型。
实际电机的转子磁链可分别由定子电压模型与转子电流模型表示为
 (A1)
(A1)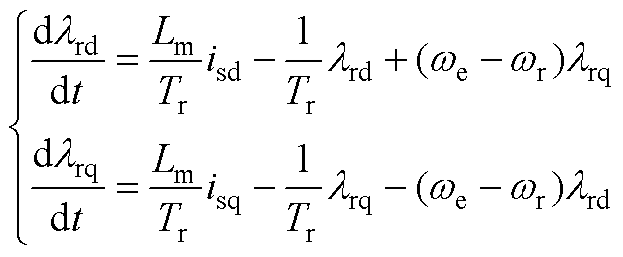 (A2)
(A2)
将式(A1)、式(A2)代入式(1),可以分别推导出电压模型磁链估计误差与电流模型磁链估计误差为
 (A3)
(A3) (A4)
(A4)
其中
将转速估计算法式(2)变换为
 (A5)
(A5)感应电机无速度传感器驱动系统基于转子磁链定向,稳态时可得
 (A6)
(A6)
根据式(A3)~式(A6)可推导出估计转速与转速估计误差及电压的传递函数为
 (A7)
(A7)其中

根据式(A7)可构建系统的动态模型。
当 时,有
时,有
 (A8)
(A8) (A9)
(A9)
 (A10)
(A10)
由终值定理知,当 时,基于虚拟电压注入的闭环磁链观测器的估计转速的稳态值为
时,基于虚拟电压注入的闭环磁链观测器的估计转速的稳态值为
 (A11)
(A11)
此时,估计转速的稳态值由q轴注入电压决定。
参考文献
[1] Xu Dianguo, Wang Bo, Zhang Guoqiang, et al. A review of sensorless control methods for AC motor drives[J]. CES Transactions on Electrical Machines & Systems, 2018, 2(1): 104-115.
[2] Gao Q, Asher G, Sumner M. Sensorless position and speed control of induction motors using high- frequency injection and without offline precom- missioning[J]. IEEE Transactions on Industrial Electronics, 2007, 54(5): 2474-2481.
[3] Staines C S, Caruana C, Asher G M, et al. Sensorless control of induction machines at zero and low frequency using zero sequence currents[J]. IEEE Transactions on Industrial Electronics, 2006, 53(1): 195-206.
[4] Metwaly M K, Elkalashy N I, Zaky M S, et al. Slotting saliency extraction for sensorless torque control of standard induction machines[J]. IEEE Transactions on Energy Conversion, 2018, 33(1): 68-77.
[5] Wang Gaoling, Yang Lei, Zhang Guoqiang, et al. Comparative investigation of pseudorandom high- frequency signal injection schemes for sensorless IPMSM drives[J]. IEEE Transactions on Power Electronics, 2017, 32(3): 2123-2132.
[6] 刘善宏, 杨淑英, 李浩源, 等. 基于旋转坐标系解调的内置式永磁同步电机旋转高频注入法位置观测[J]. 电工技术学报, 2020, 35(4): 708-716.
Liu Shanhong, Yang Shuying, Li Haoyuan, et al. Rotating high frequency signal injection based on interior permanent magnet synchronous motor rotor position estimation with the demodulation imple- mented on the synchronous reference frame[J]. Transactions of China Electrotechnical Society, 2020, 35(4): 708-716.
[7] 李文真, 刘景林. 考虑磁路饱和及交叉耦合效应的内置式永磁同步电机无传感器优化方法[J]. 电工技术学报, 2020, 35(21): 4465-4474.
Li Wenzhen, Liu Jinglin. An improved sensorless method of IPMSM considering magnetic saturation and cross-coupling effect[J]. Transactions of China Electrotechnical Society, 2020, 35(21): 4465-4474.
[8] 吴春, 陈科, 南余荣, 等. 考虑交叉饱和效应的变角度方波电压注入永磁同步电机无位置传感器控制[J]. 电工技术学报, 2020, 35(22): 4678-4687.
Wu Chun, Chen Ke, Nan Yurong, et al. Variable angle square-wave voltage injection for sensorless control of PMSM considering cross-saturation effect[J]. Transactions of China Electrotechnical Society, 2020, 35(22): 4678-4687.
[9] Yousefi-Talouki A, Pescetto P, Pellegrino G, et al. Combined active flux and high-frequency injection methods for sensorless direct-flux vector control of synchronous reluctance machines[J]. IEEE Transa- ctions on Power Electronics, 2018, 33(3): 2447-2457.
[10] Maksoud H A, Shaaban S M, Zaky M S, et al. Performance and stability improvement of AFO for sensorless IM drives in low speeds regenerating mode[J]. IEEE Transactions on Power Electronics, 2019, 34(8): 7812-7825.
[11] 苗轶如, 刘和平, 杜俊秀, 等. 一种异步电机自适应线性神经元速度观测[J]. 电机与控制学报, 2018, 22(11): 52-57, 66.
Miao Yiru, Liu Heping, Du Junxiu, et al. Speed observer of ADALINE for induction motors[J]. Electric Machines and Control, 2018, 22(11): 52-57, 66.
[12] 杨淑英, 丁大尉, 李曦, 等. 基于反电动势滑模观测器的异步电机矢量控制[J]. 电机与控制学报, 2016, 20(10): 23-30.
Yang Shuying, Ding Dawei, Li Xi, et al. Back-EMF based sliding mode observer for vector control of induction machine[J]. Electric Machines and Control, 2016, 20(10): 23-30.
[13] 陈闯, 王勃, 于泳, 等. 基于改进指数趋近律的感应电机滑模转速观测器研究[J]. 电工技术学报, 2020, 35(增刊1): 155-163.
Chen Chuang, Wang Bo, Yu Yong, et al. An improved exponential reaching law based-sliding mode observer for speed-sensorless induction motor drives[J]. Transa- ctions of China Electrotechnical Society, 2020, 35(S1): 155-163.
[14] Yin Zhonggang, Li Guoyin, Zhang Yanqing, et al. Symmetric-strong-tracking-extended-Kalman-filter-based sensorless control of induction motor drives for modeling error reduction[J]. IEEE Transactions on Industrial Informatics, 2019, 15(2): 650-662.
[15] Jansen P L, Lorenz R D. Accuracy limitations of velocity and flux estimation in direct field oriented induction machines[C]//European Conference on Power Electronics & Applications, Brighton, UK, 1993, 4: 312-318.
[16] Vaclavek P, Blaha P, Herman I. AC drive obser- vability analysis[J]. IEEE Transactions on Industrial Electronics, 2013, 60(8): 3047-3059.
[17] Holtz J. Sensorless control of induction machines- with or without signal injection?[J]. IEEE Transa- ctions on Industrial Electronics, 2006, 53(1): 7-30.
[18] Lefebvre G, Gauthier J Y, Hijazi A, et al. Observability- index-based control strategy for induction machine sensorless drive at low speed[J]. IEEE Transactions on Industrial Electronics, 2017, 64(3): 1929-1938.
[19] Sun Wei, Wang Zhenyu, Xu Dianguo, et al. Stable operation method for speed sensorless induction motor drives at zero synchronous speed with esti- mated speed error compensation[J]. IEEE Transa- ctions on Power Electronics, 2019, 34(11): 11454- 11466.
Induction Motor Speed Sensorless Vector Control System Based on Closed-Loop Flux Observer with Virtual Voltage Injection
Abstract For many years, the instability problem of the induction motor speed sensorless vector control system in the low synchronous speed range has not been solved. It results from the unobservable system state variables, the unstable pole distribution and the poor robustness of the motor parameters. If and only if the three problems are solved simultaneously, the instability problem in the low synchronous speed range can be solved. In this paper, a virtual voltage injection method is adopted based on the classical closed-loop flux observer to improve its stability in the low speed range. Different from the traditional high frequency/low frequency signal injection method, the virtual voltage is injected into the observer rather than the motor. It can solve the observability of the system state variables, the stability of the pole distribution and the robustness of the motor parameters at the same time. Finally, the stable operation of the system can be achieved in the low synchronous speed range.
Keywords:Induction motor, speed sensorless, closed-loop flux observer, virtual voltage injection
中图分类号:TM346+.2
DOI: 10.19595/j.cnki.1000-6753.tces.L90249
国家自然科学基金(51807077)和台达电力电子科教发展计划(DREG2018002)资助项目。
收稿日期 2020-07-07
改稿日期 2020-11-01
E-mail: wang_zhenyu@hust.edu.cn
孙 伟 男,1961年生,博士,讲师,研究方向为交流电力传动和电力电子控制理论。
E-mail: sunwei77@hust.edu.cn(通信作者)
(编辑 陈 诚)