
图1 同心笼次级直线双馈电机结构
Fig.1 Structure of NLS-LDFM
摘要 同心笼次级直线双馈电机相关研究十分匮乏,其端部效应特征尚不明确,亦未有能体现其端部效应的等效电路,严重制约了该类电机的进一步发展。针对上述问题,该文对同心笼次级直线双馈电机静态及动态端部效应分别进行深入分析,并建立考虑端部效应的等效电路。首先,基于短初级直线电机绕组理论,阐明静态端部效应下直接耦合的产生机理,明确直接耦合感应电动势的分布特点,推导出直接耦合作用下的等效阻抗;然后,基于电机中的电磁关系,分析电机稳态运行时同心笼的过渡过程,计算出动态端部效应修正系数;随后,基于端部效应分析结果并结合传统无刷双馈电机等效电路拓扑,建立同心笼次级直线双馈电机等效电路,推导电机推力表达式;最后,通过静态端部效应和动态端部效应的有限元仿真及实验,间接验证了分析结果的合理性。
关键词:直线双馈电机 同心笼次级 端部效应 等效电路
在城市轨道交通中,采用直线电机牵引系统可有效提升列车爬坡能力、降低噪声、减小转弯半径及隧道截面。相较于当前广泛使用的直线感应电机(Linear Induction Machine, LIM),直线双馈电机(Linear Doubly-Fed Machine, LDFM)具有功率因数灵活可调、运行模式多样化等优势,具有较高的研究价值和广阔的应用前景[1]。
LDFM是自20世纪90年代发展起来的一种新型直线电机。在同心笼转子旋转无刷双馈电机的基础上,美国俄勒冈州立大学首次提出了直线无刷双馈电机(Linear Brushless Doubly-Fed Machine, LBDFM),并通过改造一台LIM得到LBDFM样机,完成了相关静态测试[2-3]。德国帕德博恩大学在“新型铁路技术”项目中采用了由旋转有刷双馈感应电机演变而来的LDFM牵引系统,在电机等效电路[4]、控制策略[5]、供电模式[6]等方面开展了较深入的研究,并建成了小型试验线路。近年来,国内西南交通大学[7]、同济大学[8]、浙江大学[9]、南京航空航天大学[10]等相关团队对城轨交通用LDFM也开展了多项研究。本文所研究的LDFM与俄勒冈州立大学的电机类型相同。鉴于目前已知的LDFM均不存在电刷及集电环结构,因而简单用“有刷”和“无刷”来区分LDFM类型并不准确。为此,本文基于电机次级结构特征,将所研究的LDFM称作同心笼次级直线双馈电机(Nested-Loop Secondary Linear Doubly-Fed Machine, NLS-LDFM)。
直线电机因其铁心两端开断而存在一定程度的端部效应。针对LIM,一般可通过建立一维场下麦克斯韦方程组求解气隙磁场,进而分析电机端部效应[11-14];针对直线同步电机(Linear Synchronous Machine, LSM),一般可通过对端部磁场求解,进而分析出空载和负载条件下的端部力特征。
LIM一维场分析方法依赖次级导板沿运动方向电导率相同的特征,并不适用于次级采用同心笼结构的NLS-LDFM;LSM端部力分析方法需要主动励磁(永磁体励磁、电励磁或混合励磁)作为激励条件,也不适用于通过感应气隙磁场产生次级电流的NLS-LDFM。综上所述,关于NLS-LDFM的端部效应现象,因现有分析方法难以直接运用,迄今仍不能对其进行较准确的定性和定量描述,电机运行特性有待进一步研究。
为此,本文深入分析NLS-LDFM的端部效应,并提出能够考虑端部效应主要特征的等效电路。首先,介绍了NLS-LDFM的基本结构及运行原理;然后,基于短初级直线电机绕组理论分析了静态端部效应;其次,从同心笼进出气隙的物理过程入手,分析了动态端部效应;再次,基于端部效应分析结果和旋转无刷双馈电机等效电路,提出了考虑端部效应的NLS-LDFM等效电路;最后,通过有限元仿真和实验验证了理论分析的有效性。
NLS-LDFM结构如图1所示,电机采用短初级单边平板型直线电机结构。纵向长度为L的初级铁心绕有两套极对数分别为pp和pc(pp≠pc)的绕组,分别称作功率绕组和控制绕组;次级铁心沿运动方向每隔L均匀嵌放(pp+pc)巢同心笼,每巢同心笼由若干笼环组成。一般功率绕组的激励保持不变,根据控制绕组激励方式不同,电机的运行方式分为:变频激励下的非自然同步速双馈运行、直流激励下的自然同步速双馈运行、短路或串电阻短路下的串级异步运行和开路下的普通异步运行。
图1 同心笼次级直线双馈电机结构
Fig.1 Structure of NLS-LDFM
电机稳定运行时,次级同心笼起到气隙磁场极对数转换的作用,使得初级两套绕组能够通过同心笼间接传递功率。若以初级铁心为参考对象,当功率绕组和控制绕组分别由频率为fp和fc的电流激励时,两套绕组将产生工作行波磁场,其速度为
 (1)
(1)
式中,t为极距;下标w表示功率绕组或控制绕组,p为功率绕组,c为控制绕组;频率f的正负代表绕组通电相序的正反,进而表示工作行波磁场运动的正负方向。设次级沿x方向以机械速度vm匀速运动,则同心笼将切割两套工作行波磁场,其相对速度为
 (2)
(2)
若使电机稳定运行,则同心笼中只能产生一个工作频率的感应电流,即相对速度应满足
 (3)
(3)
由于电机采用和调制的结构方案,故式(3)取负号,进而由式(1)~式(3)可得次级的机械速度为
 (4)
(4)
式(4)即为NLS-LDFM的稳定运行条件。显然,该电机在原理上与旋转无刷双馈电机基本相同[15],区别仅在于前者作直线运动,后者作旋转运动。因此,NLS-LDFM具有和旋转无刷双馈电机相似的电磁关系,不同之处在于NLS-LDFM因铁心两侧开断而存在端部效应,进而影响其运行性能。下面将分别对NLS-LDFM中的静态及动态端部效应展开分析。
在短初级直线电机中,初级铁心两侧开断导致三相绕组磁路不对称,使得电机在三相对称电压激励下产生三相不对称电流,进而产生反向行波磁场和脉振磁场等磁场成分,该现象一般称作静态端部效应。然而在本文所讨论的NLS-LDFM中,静态端部效应还将引起初级两套绕组间的直接耦合。
直接耦合会让一部分功率不经过次级磁场调制而在初级两套绕组间直接传递,进而造成较大的能量损失和转矩波动,严重时将导致电机无法运行。为避免直接耦合发生,一般在设计无刷双馈电机时会选取合适的绕组极对数配合,常见的pp/pc配合方式包括1/3、2/4等。理论上,如果将两套绕组可产生空间谐波的极对数分别视作集合Cp和Cc,那么当Cp∩Cc=Æ时,两套绕组间将不存在直接耦合。然而这一条件在短初级结构的NLS-LDFM中难以得到满足,究其原因是初级两套绕组总是会产生相同极对数的空间磁场。下面将结合短初级直线电机绕组理论[16]中的部分观点作进一步阐释。
在短初级直线电机中,常见的交流绕组形式有两种:①单层绕组,其排布方式和对应旋转电机相同;②含半填充槽的双层叠绕组,其铁心需要增加绕组节距所对应的槽数以放置端部附近线圈的上/下元件边。考虑绕组由三相对称电流源激励,单层绕组在产生与旋转电机相同的磁场分量时,还会在气隙中产生不随空间位置变化,仅随时间交变的“0对极”脉振磁场分量;半填充槽双层叠绕组虽不会产生这种脉振磁场分量,但会在气隙中产生除脉振磁场外所有极对数的磁场分量。因此,若电机采用单层绕组,则两套绕组可以通过脉振磁场分量直接传递功率;若电机采用半填充槽双层叠绕组,则两套绕组将通过除脉振磁场外全部磁场分量直接传递功率。考虑到槽极配合并尽可能降低两套绕组的直接耦合程度,一般选用两套单层绕组方案,下面将针对这种方案下的直接耦合进行分析。
假定初级两套绕组均沿次级运动方向按相序排布,则A、B两相绕组位于初级铁心“两端”,C相绕组位于初级铁心“中部”。根据参考文献[16]中脉振磁动势的分析结果,若在功率绕组每相中通入电流Ip,则将产生脉振磁通密度 为
为
 (5)
(5)
式中,m0为真空磁导率;de为卡特系数修正后的等效气隙长度;Kav为脉振系数;Nw为对应绕组每相串联匝数; 为对应绕组线圈节距。
为对应绕组线圈节距。
进一步,可求得控制绕组A相交链的磁链为
 (6)
(6)
式中,lef为硅钢片等效叠厚;lav为直接耦合等效磁路的磁导。然后得到控制绕组A相与功率绕组间直接耦合的互感为
 (7)
(7)
同理,可求得控制绕组B、C相与功率绕组间的直接耦合互感,最终得到直接耦合电感矩阵为
 (8)
(8)
由式(8)可知,直接耦合电感矩阵为对称矩阵,且矩阵中各元素绝对值相等。因为次级齿槽所引起的磁导变化可忽略不计,所以可认为矩阵中各元素不随初、次级铁心相对位置变化而变化,即认为直接耦合互感为常数。需要指出,引起直接耦合的脉振磁场也是使得电机自身三相绕组不对称的重要因素,但本文对静态端部效应的分析重在直接耦合方面,为简化分析,假定两套绕组各自三相电感对称,这一假设在电机极对数较多时是合理的。
当绕组w开路时,脉振磁场仅由绕组 建立,其磁通密度表达式为
建立,其磁通密度表达式为
 (9)
(9)
该磁场与每相绕组交链的磁链可表示为
 (10)
(10)
进而得到脉振磁场对应的“励磁电感”为
 (11)
(11)
当绕组w在短路或激励状态下构成通路时,直接耦合会在两套绕组间产生谐波电动势进而产生谐波电流。基于式(8)所表示的直接耦合互感矩阵,可得绕组在绕组w中产生的感应电动势向量为
 (12)
(12)
式中,p为微分算子,p=d/dt; 为绕组三相电流向量;
为绕组三相电流向量; 为绕组w的直接耦合磁链向量。由于两套Y接绕组中性点未引出,根据KCL定律可知三相电流和为0,进而可将式(12)化简为
为绕组w的直接耦合磁链向量。由于两套Y接绕组中性点未引出,根据KCL定律可知三相电流和为0,进而可将式(12)化简为
 (13)
(13)
由式(13)可知,两套绕组通过直接耦合产生的感应电动势具有两个基本特征:①其幅值、频率和相位仅与另一套绕组的中间相(C相)电流有关;②边端相(A相和B相)同幅值同相位,与中间相(C相)同幅值反相位。每套绕组中的电压u和电动势e的关系如图2所示。
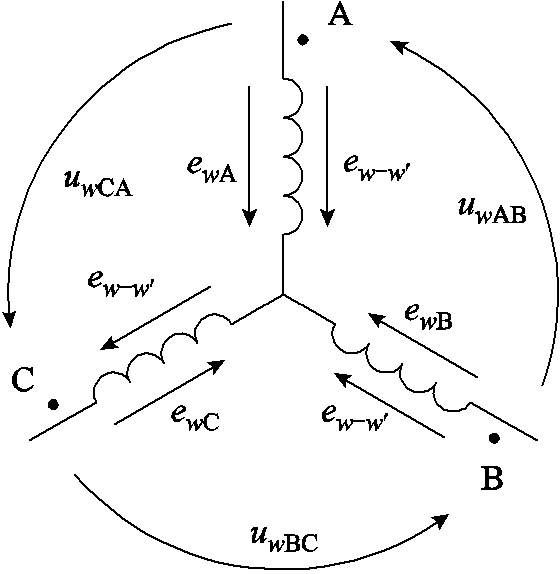
图2 每套绕组电压、电动势关系
Fig.2 Relationship between voltage and electromotive force in each winding
由于直接耦合电动势频率与对应绕组基波电压及电动势频率往往不同,因此可根据叠加原理将该电动势单独提出作进一步分析。直接耦合感应电动势电路如图3所示,Rw为相电阻,Lws和Lw分别为每相自感和漏感,Lmw为单相等效电路中的基波励磁电感。若将该电动势所产生的功率平均到绕组w每一相中,则可认为每一相的等效电动势仅为图3所示的 。类比变压器中的电磁关系,结合式(7)、式(11)和式(13)可得直接耦合等效电压比为
。类比变压器中的电磁关系,结合式(7)、式(11)和式(13)可得直接耦合等效电压比为
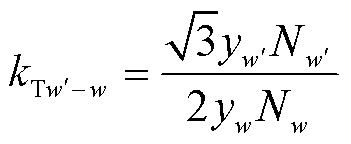 (14)
(14)
进而得到折算后的电阻和电感为
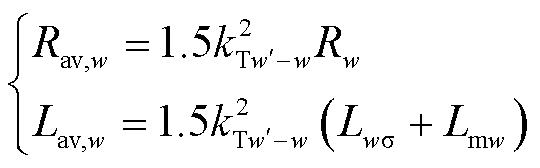 (15)
(15)
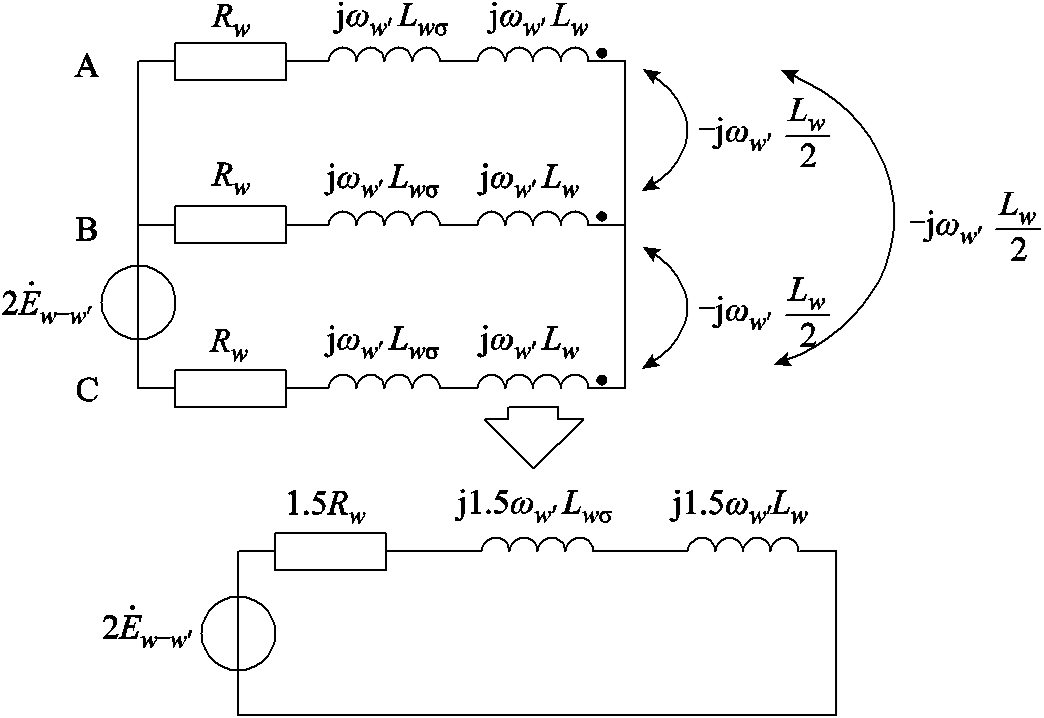
图3 直接耦合感应电动势电路
Fig.3 Electromotive-force circuit by direct coupling
式(11)和式(15)构成了单相等效电路中由直接耦合引起的等效阻抗,如图4所示,其中虚线表示对应支路仅在绕组w构成通路时存在。
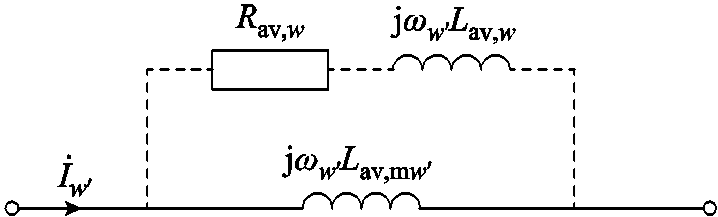
图4 直接耦合等效阻抗
Fig.4 Equivalent impedance for direct coupling
当初次级铁心发生相对运动时,气隙中不断有同心笼进出。与旋转无刷双馈电机稳定运行时每一巢同心笼都处于稳态工况不同,在进出气隙的过程中,NLS-LDFM同心笼感应电流存在动态响应,这种动态响应对电机性能的影响称为动态端部效应。
NLS-LDFM次级同心笼与LIM次级导板的动态响应有相似之处。由于针对LIM动态端部效应的研究相对成熟,因此本节以LIM初次级电磁关系为基础,对NLS-LDFM稳态运行时的电磁关系作详细讨论。
一种不考虑铁耗的LIM等效电路[17]如图5所示。其中,励磁支路可变电阻所消耗的功率表示由动态端部效应引起的额外次级涡流损耗,也有研究将这种影响归算到次级支路[18]。励磁支路可变电感对应端部效应作用下的气隙主磁场,这是大多数模型计及端部效应的主要方式,也是分析LIM动态端部效应的重点。根据楞次定律,当次级导板“新的部分”刚进入气隙时,这一部分会迅速建立起涡流以削弱“突然出现”的气隙磁场,随后这种涡流会随着时间推移而逐渐衰减。因此,气隙主磁场整体上被削弱,反映在等效电路上即是励磁电感减小。
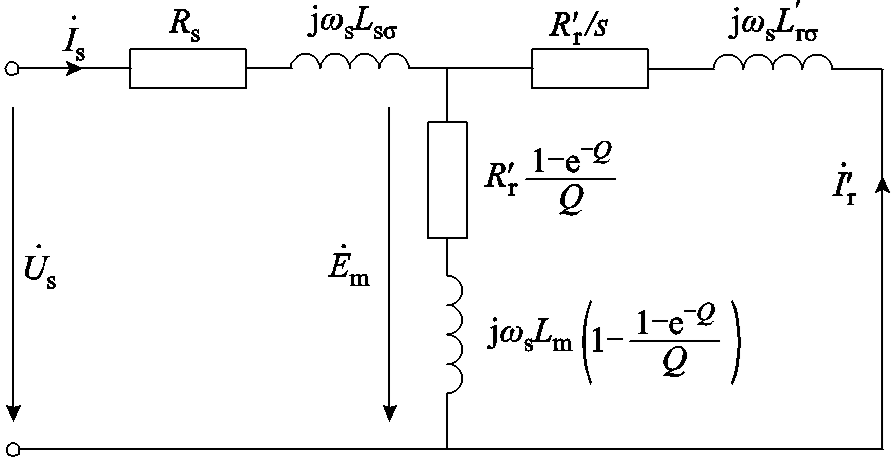
图5 直线感应电机等效电路
Fig.5 Equivalent circuit for LIM
上述分析思路同样适用于NLS-LDFM,但又有所不同。首先,不同于LIM导板,同心笼结构具有相对较大的实际电阻及电感。因此尽管刚进入气隙的同心笼也有抵抗磁场变化的趋势,但并不会迅速建立起能够削弱气隙磁场的大电流;其次,类似旋转感应电机,LIM气隙磁场与次级导板的初始位置无关,而NLS-LDFM两套工作磁场的分布与次级初始位置有关。若直接类比LIM分析方法研究动态响应过程中气隙磁场的变化,则需额外讨论同心笼的初始位置,增加分析及建模难度。此处不妨换一种视角来阐释NLS-LDFM中的电磁关系:
(1)励磁电感不变。由电机设计可知,对线性磁路而言,励磁电感的大小完全由绕组方案和磁路结构决定。而对于NLS-LDFM这类隐极电机,无论初次级铁心以何种速度发生相对运动,都不会改变绕组对应的磁路结构。因此可认为电机的励磁电感不变,反映出绕组建立磁场的能力不变。
(2)磁场完全由初级电流建立。在图5所示等效电路中,次级电流与初级电流共同流过励磁电感的过程表示二者共同建立气隙磁场,这与电机中真实的电磁关系相符。此时若将次级电流参考正方向反向,则可将其视作初级电流的“分流”。据此可以认为,气隙磁场完全由一部分初级电流即“励磁电流”建立,而次级感应电流所建立的磁场需要由另一部分初级电流即“分流”所建立的磁场去抵消,以维持励磁电流所建立的气隙磁场大小不变。
基于上述分析,NLS-LDFM的初级及励磁支路阻抗参数将不受同心笼动态响应的影响。电机中的动态端部效应问题被简化为初级两套绕组的“分流”问题。“分流”的关键在于同心笼的等效阻抗,而等效阻抗与同心笼的动态响应密切相关。
分析同心笼动态响应过程中忽略直接耦合,即忽略直接耦合谐波对同心笼感应电动势的影响,则NLS-LDFM耦合关系如图6所示。应注意到同心笼支路并非表示真实的同心笼,而是已等效为单相绕组的同心笼,等效方法与对应的旋转电机相同,此处不再赘述。由3.1小节分析可知,电机运行过程中初级两套绕组建立磁场的能力不变,则其在同心笼中产生的感应电动势不变。因此,研究NLS-LDFM动态端部效应即是研究同心笼在感应电动势作用下的零状态响应。应注意此时转子初始位置信息已隐含于同心笼感应电动势的相位之中,因此不必额外对此进行讨论。
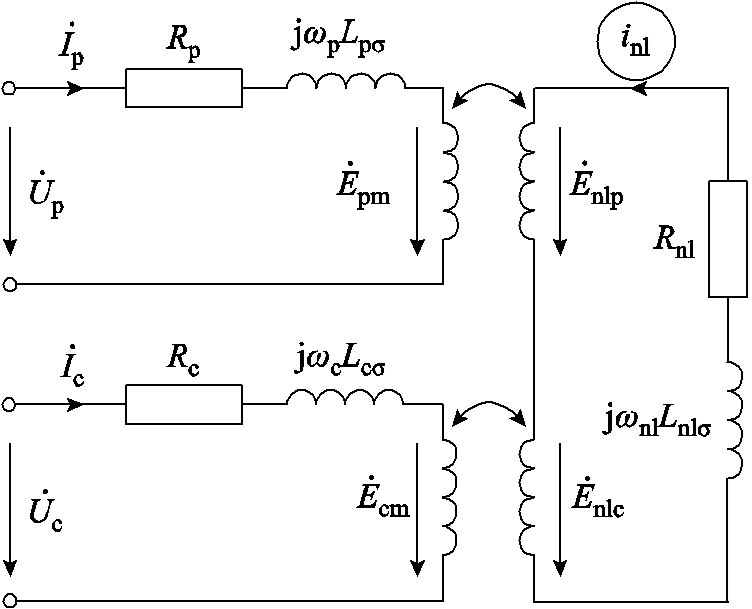
图6 同心笼次级直线双馈电机耦合关系
Fig.6 Relationship of coupling in NLS-LDFM
设t=0时同心笼支路电流为0,感应电动势为
 (16)
(16)
式中,Enl为感应电动势有效值;wnl为角频率;jnl为初相位。次级同心笼感应电流 可通过一阶电路的零状态响应求解,其数学方程为
可通过一阶电路的零状态响应求解,其数学方程为
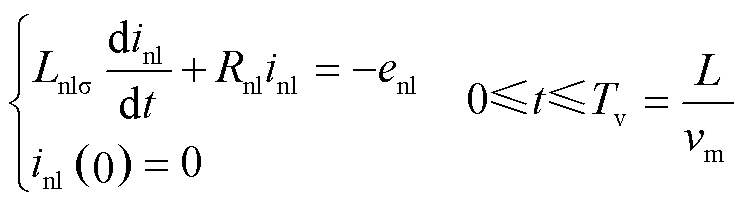 (17)
(17)
式中,Lnls为同心笼支路电感;Rnl为同心笼支路电阻;Tv为等效时间周期,即笼环穿过气隙所需要的时间。进一步求解得到
 (18)
(18)
式中,inlS为次级同心笼电流的稳态分量;inlT为其暂态分量;fnl为同心笼阻抗角;Tnl为次级时间常数; 为同心笼电流有效值。
为同心笼电流有效值。
根据式(18)可知,次级同心笼中的电流不仅存在与旋转无刷双馈电机相同的稳态分量inlS,还存在随时间衰减的暂态分量inlT。暂态分量的大小与电动势初相位jnl和同心笼阻抗角fnl之间的相位差有关。当相位差为0时,暂态分量最大,对同心笼电流的影响最大;当相位差为90°时,暂态分量恒为0,对同心笼电流无影响,此时相当于对一阶电路突加正弦电压激励,而激励的相位与电路阻抗角相匹配,电流直接进入稳态,无过渡过程。
进一步地,式(18)中的稳态分量作用于全时段,而暂态分量作用于式(17)所示的等效时间周期Tv,近似求得等效电流有效值为
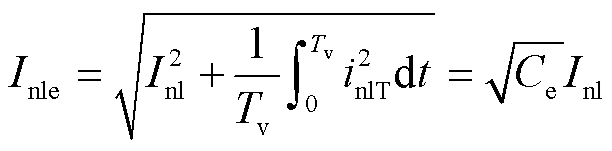 (19)
(19)
其中,
 (20)
(20)
当电机速度为0时,运动周期Tv趋于无穷大,此时系数Ce=1,对同心笼稳态电流有效值不产生影响。同时,由于NLS-LDFM为高滑差低速电机,同心笼角频率wnl及运动周期Tv较大,若通过合理设计有效降低同心笼的漏感特别是谐波漏感,进而减小次级时间常数Tnl,使其远小于Tv,则系数Ce将趋近于1,即动态端部效应的影响可忽略不计。
由于同心笼支路感应电动势不变,等效感应电流有效值发生了变化,可得同心笼等效阻抗为
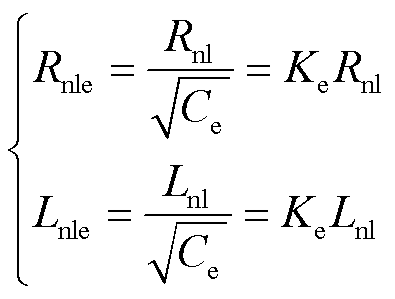 (21)
(21)
式中,Ke为动态端部效应修正系数,当考虑式(20)中三角函数项为1时,其变化规律如图7所示。

图7 修正系数Ke变化规律
Fig.7 Variation law of correction factor Ke
由于NLS-LDFM中主要的电磁关系与对应旋转电机相同,因此其模型可借鉴传统旋转无刷双馈电机的等效电路,如图8所示。图中转子绕组和控制绕组参数均折算到定子功率绕组侧(分别用上标′和″表示),若不考虑自然同步速(控制绕组侧转差率sc→∞)及功率绕组同步速(功率绕组侧转差率sp=0)工况,则等效电路是有效的。
综合第2节和第3节中的端部效应分析,可得出图9所示的NLS-LDFM等效电路,对比图8具有两个特点:①两套初级绕组支路增加了由直接耦合带来的等效阻抗,因其不贡献电磁转矩,故可视作两套绕组额外的漏阻抗;②次级同心笼支路阻抗采用动态端部效应系数Ke予以修正。依据该电路推导电磁推力的方法与常规等效电路[19-20]相似。
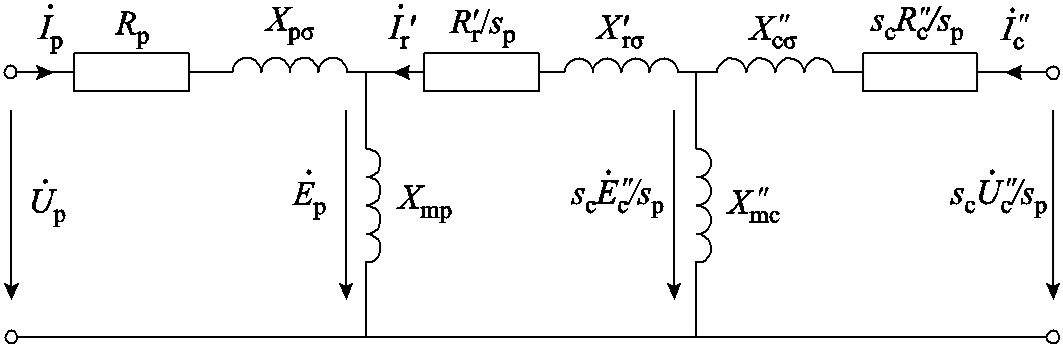
图8 旋转无刷双馈电机等效电路
Fig.8 Equivalent circuit for rotary brushless doubly-fed machine
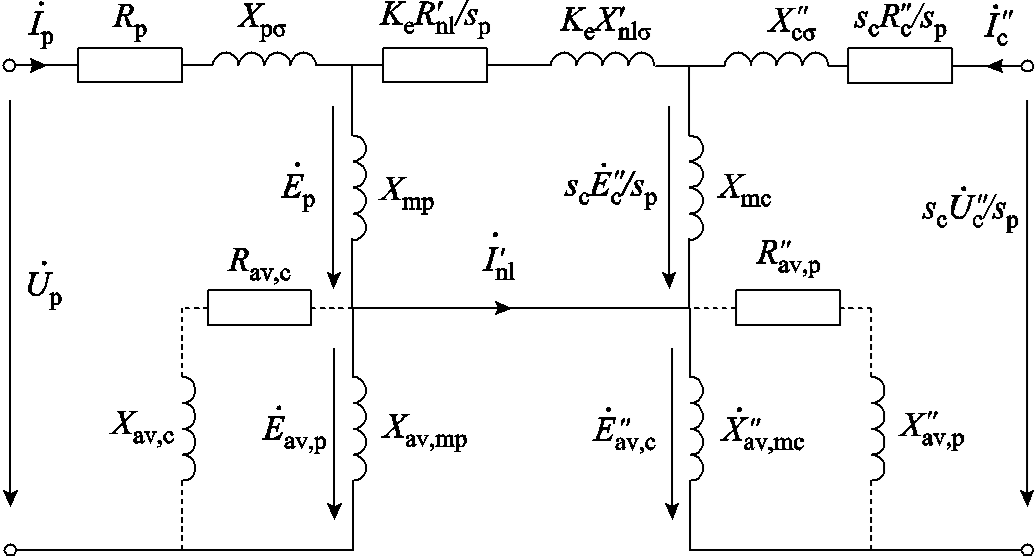
图9 同心笼次级直线双馈电机等效电路
Fig.9 Equivalent circuit for NLS-LDFM
根据功率传递关系可得
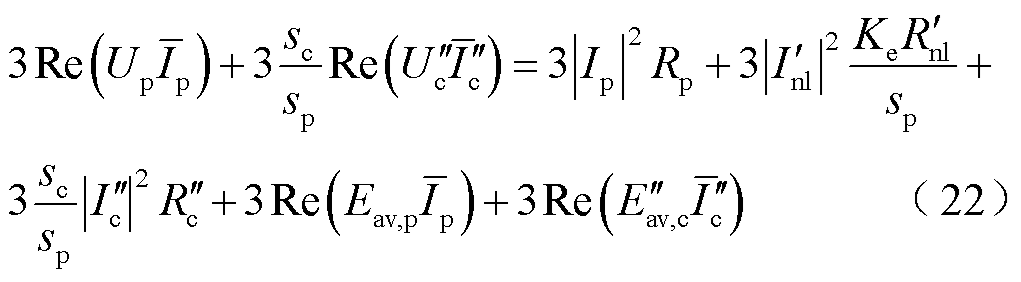

式中,U为对应绕组相电压; 为对应绕组直接耦合电动势;vnl为电机的运动速度;F为电机的电磁推力;上标“—”表示共轭运算。式(22)和式(23)相减可得
为对应绕组直接耦合电动势;vnl为电机的运动速度;F为电机的电磁推力;上标“—”表示共轭运算。式(22)和式(23)相减可得
 (24)
(24)
式中,Ew为对应绕组励磁电动势。
电机的运动速度可表示为
 (25)
(25)
式中,vn为自然同步速。将式(25)代入式(24)可得电机的推力为
 (26)
(26)
NLS-LDFM实验平台如图10所示。样机采用弧形电机方案,左右两侧分别放置一个初级铁心,每个初级铁心上绕有两套绕组,两端开断的弧形初级可产生与直线电机相似的端部效应。中间转子为同心笼次级,转子轴经过联轴器和扭矩仪与作为负载的永磁发电机相连,发电机通过三相调压器连接负载电阻。样机对应的2D有限元仿真模型如图11所示。

图10 同心笼次级直线双馈电机实验平台
Fig.10 Experimental platform of NLS-LDFM
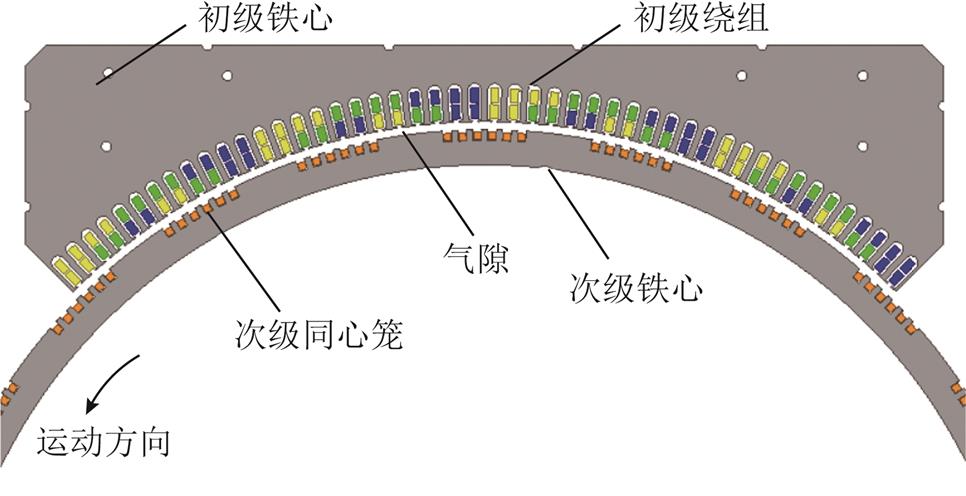
图11 同心笼次级直线双馈2D有限元仿真模型
Fig.11 2D simulation model of NLS-LDFM
在实验过程中,采用背靠背变频器为图10中的“NLS-LDFM初级1”供电,另一个初级处于完全开路的非工作状态。样机主要参数见表1,其中等效电路参数获取方式如下:次级同心笼的阻抗通过等效旋转无刷双馈电机的2D有限元仿真结果拟合得到;直接耦合励磁电感通过5.1小节的直接耦合实验,并结合式(7)、式(11)和式(13)求解获得,其余参数通过解析计算得到。
表1 同心笼次级直线双馈电机样机参数
Tab.1 The parameters of prototyped NLS-LDFM

参数数值 纵向长度/m0.9 硅钢片等效叠厚/m0.12 气隙长度/m0.008 初级绕组极对数pp, pc2,4 初级绕组电阻/Ω0.457,0.347 初级绕组漏感/mH2.8,2.2 初级绕组励磁电感/mH18.8,9.4 次级同心笼电阻/Ω2.828 次级同心笼漏感/mH8.2 直接耦合励磁电感/mH2.626,1.321 直接耦合等效电压比0.894,0.839
本文通过检测直接耦合电压以验证静态端部效应分析结果。将其中一套绕组开路,在普通异步运行模式下测量开路绕组的感应电压,同时为尽可能避免调制电动势的影响,使电机运行于自然同步速,此时调制磁场与开路绕组相对静止,不产生电动势。由于功率绕组在额定电压和额定频率下无法驱动电机以普通异步运行模式达到自然同步速,而控制绕组可以满足上述要求,因此在实验中采用控制绕组驱动电机运行。
利用变频器为控制绕组通以频率为50Hz、相电压有效值为120V的交流电,功率绕组开路,调整负载大小,使电机稳定运行于自然同步速附近(7.5m/s±0.03m/s),同时记录功率绕组AB、BC、AC三个端口的线电压波形,并对测量结果进行快速傅里叶变换(Fast Fourier Transform, FFT)分析,如图12所示。在自然同步速下,经次级同心笼调制产生的4极磁场相对功率绕组静止,若依旋转无刷双馈电机工作原理,则不会在功率绕组中产生感应电压。实验中的感应电压主要来源于两个方面:
(1)直接耦合。由第2节分析可知,直接耦合将在另一套绕组中产生与原绕组同频率的感应电压,且A、B相同相位,C相反相位。理论上,基于前述实验条件,可在AC和BC端口测得幅值和相位相同的50Hz感应电压,在AB端口测不到50Hz感应电压。实验结果与分析结果基本吻合,实验中AC和BC感应电压的相位分别为115.30°和119.83°,基本同相。其幅值和相位的偏差说明实验中A相和B相中的直接耦合感应电压并不完全相同,这使得实验中测得AB端口存在直接耦合电压。引起A相和B相直接耦合电压差异的直接原因是气隙脉振磁场沿运动方向分布不均,而造成这种现象的因素可分为三个方面:①铁心磁阻使得各线圈产生的脉振磁场与线圈节距并非纯线性关系,进而使得实验结果较叠加运算产生偏差;②电机装配偏差导致的初、次级间隙不均(经楔形塞尺测量,气隙长度为7.1~8.3mm不等),加剧了三相绕组不对称度;③次级非均匀开槽使得绕组磁路呈现出一定程度的凸极性。
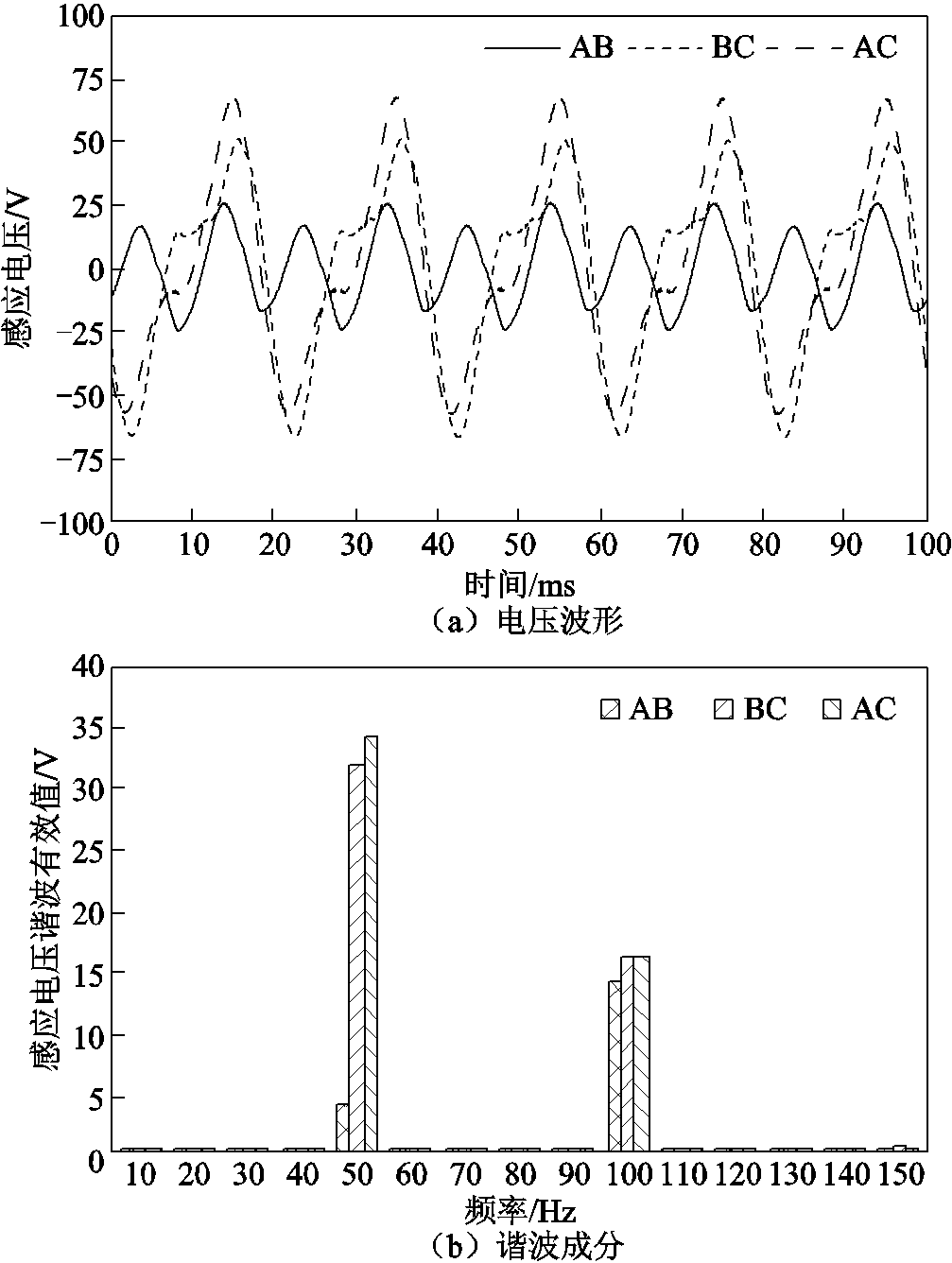
图12 自然同步速下4极绕组感应电压实验结果
Fig.12 Experimental results of induced voltage for 4-pole winding at natural synchronous speed
(2)负序电流。从谐波分析结果可知,感应电压中除了含有直接耦合产生的50Hz谐波,还含有幅值较大的100Hz谐波,该谐波来源于控制绕组的负序电流。由于三相绕组不对称且上述装配偏差加剧了这种不对称,使得控制绕组在对称电压激励下产生了不对称电流。按照本文对频率符号的定义,即额外产生了频率为-fc的负序电流,进而产生了反向行波磁场,经次级同心笼调制后,在功率绕组中产生了感应电压。根据式(4),当电机运行速度不变时,可得该感应电压的频率为fp=0+50-(-50)= 100Hz,与实验结果一致。进一步分析AB、BC和CA感应电压相位,分别为-142.16°、101.86°和-25.57°(测得AC感应电压的相位为154.43°,CA感应电压相位通过反向得到),可知三者近似互差120°,其超前滞后关系与采用频率分析得到的相序相符。
结合2D有限元仿真结果,可对上述分析作进一步阐释。仿真采用与实验相同的激励与转速条件,得到感应电压波形及FFT结果如图13所示。对比图12中的实验结果可知,无论是直接耦合还是负序电流引起的感应电压,实验值均明显高于仿真结果。对比分析可知,实验样机的气隙因加工及装配偏差而变得不均匀,极大地降低了三相绕组的对称性:一方面增大了通电绕组电流的负序分量而增强了反向行波磁场;另一方面增大了脉振磁场分量而强化了直接耦合,最终导致上述感应电压的仿真分析与实验结果出现一定的偏差。

图13 自然同步速下4极绕组感应电压仿真结果
Fig.13 Simulation results of induced voltage for 4-pole winding at natural synchronous speed
由于在电机运行过程中无法直接测得同心笼感应电流的动态变化,本文通过对比BDFM和NLS-LDFM的2D有限元仿真结果,间接说明本文对同心笼动态响应分析的合理性,并阐明分析结果的局限性。
本文分别对NLS-LDFM和BDFM功率绕组通以频率为50Hz、线电压有效值为180V的交流电,并以相同的次级初始位置串级异步运行于9.6m/s的速度,得到对应同心笼某环电流波形,具体如图14所示。NLS-LDFM的笼环所在的巢于46.875ms完全进入气隙,于140.625ms完全移出气隙。由图14可知,当笼环完全位于气隙中时,二者的电流波形基本重合,说明对所述样机而言,同心笼的动态响应几乎不影响笼环在气隙中的电流分布。另外,由电流波形可知,同心笼在进入气隙时未能迅速产生“大电流”以削弱气隙磁场,而是相对平稳地建立起稳态运行电流,这与前文分析结果一致。
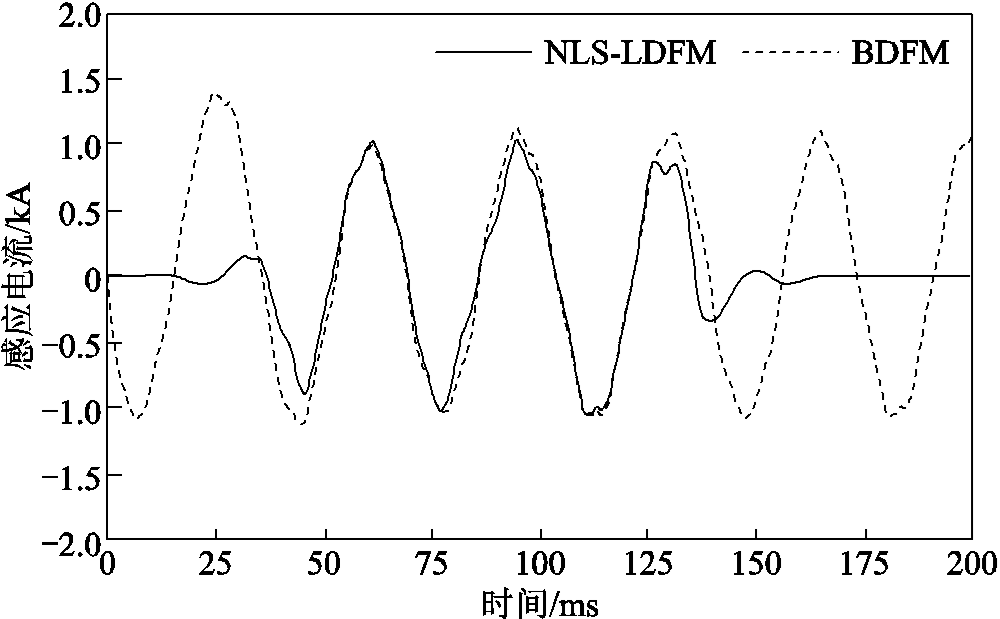
图14 同心笼电流动态过程
Fig.14 Dynamic process of current in nested-loop
同时,图14所示结果也反映出本文分析方法尚存在一定的局限性:由进出气隙时的电流动态过程可知,笼环并非在进入气隙时才开始建立感应电流。由于电机两端铁心开断,端部磁场向远处延伸,使得笼环因较早地产生了感应电动势而出现感应电流。当笼环移出气隙时,感应电流并不会迅速衰减到0,而是延续了一段时间。相关过程中的磁场变化是否会对电机性能产生影响,本文尚未详细考虑,有待后续做进一步的分析与探讨。
此外,本文通过测量电机运行特性以进一步验证动态端部效应分析结果。由于NLS-LDFM动态模型尚不完善,目前无法实现闭环控制下的双馈电动运行;同时因电机惯量很大,速度响应较慢,开环双馈电动运行存在失步过电流的风险。为此,本文进一步选择串级异步运行模式以验证动态端部效应分析结果。利用变频器为功率绕组通以频率为50Hz、线电压有效值为180V的交流电,控制绕组短路。具体操作包括:首先,调节调压器使永磁发电机处于近似空载的工况,驱动电机达到最高速度,受电机自身特性及机械阻力的影响,电机只能升速到自然同步速附近;然后,调节调压器,使永磁发电机等效负载电阻变小,电机逐渐降速,达到平衡时记录相应的速度及推力,绘制串级异步运行机械特性如图15a所示;最后,根据所提出的NLS-LDFM等效电路及传统无刷双馈电机等效电路分别绘制同等激励条件下的特性曲线。图15a所示结果可从如下三个方面进行分析。
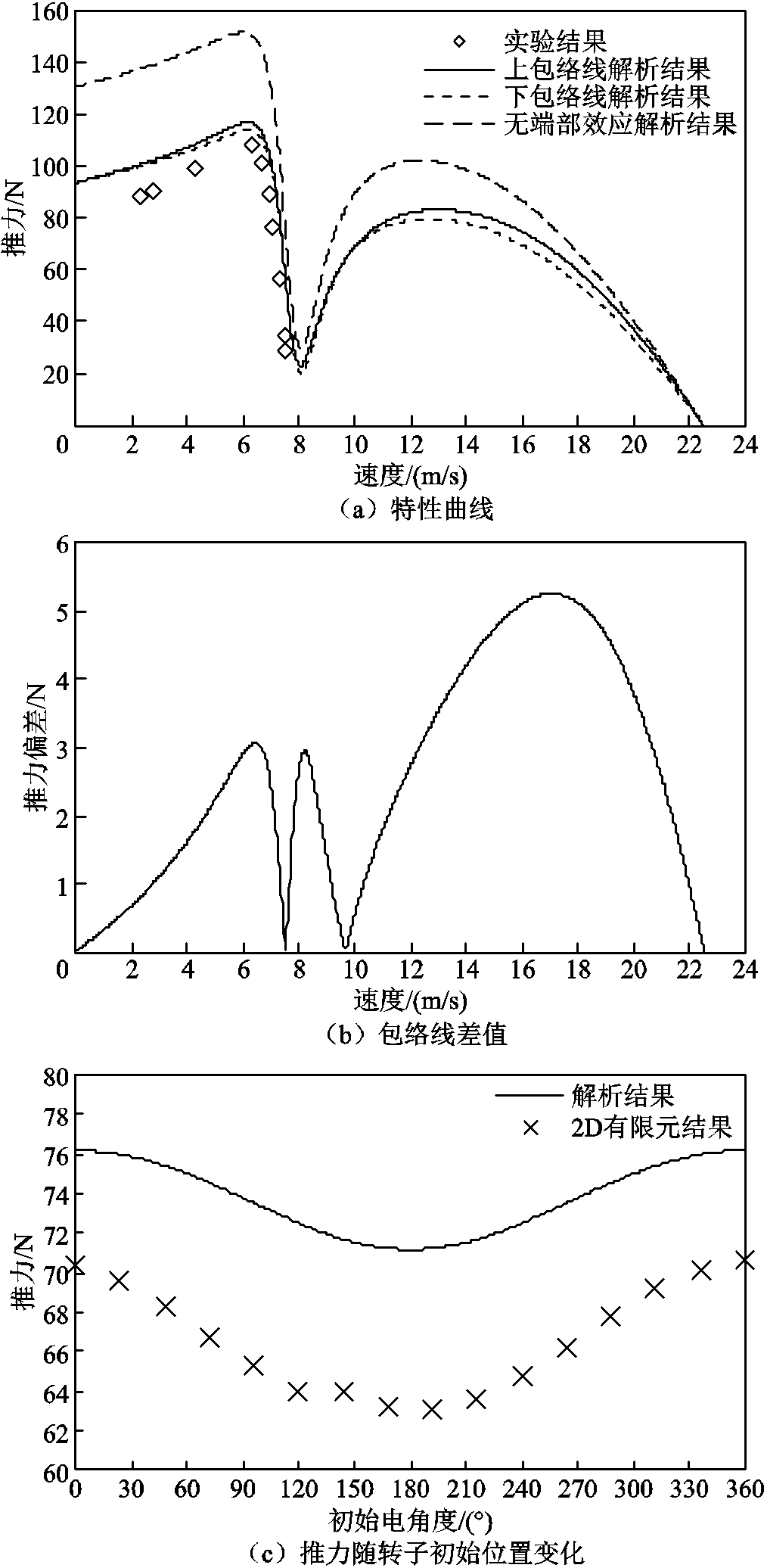
图15 串级异步运行机械特性
Fig.15 Mechanical characteristic under cascade induction mode
(1)包络线。由于修正系数Ke受fnl和jnl间相位差的影响,NLS-LDFM的特性曲线由上下包络线组成。说明即使电机作串级异步运行,在相同激励条件及转速下,电机的电磁推力仍与转子初始位置有关。包络线的差值如图15b所示。由图可知,上述相位差在不同速度下对推力的影响明显不同。进一步地,由式(26)及等效电路可知,同一速度下Ke的变化将引起次级阻抗的变化,进而引起电流的变化;由于该电机推力成分较为复杂,不同电流引起的电磁推力之和可能变化不大,因此会出现图15b中较为复杂的变化趋势。因当前实验条件无法测量不同速度下不同转子初始位置引起的电磁推力变化,为进一步说明该运行模式下推力的大小与转子初始位置有关,将速度为15.75m/s时的解析结果与同等条件下的2D有限元仿真结果进行比较,其结果如图15c所示。
(2)误差。由图15a和图15c可知,解析结果高于实验结果与有限元仿真结果。若不考虑模型及参数准确性问题,误差的来源主要有四点:①解析过程未考虑铁耗的影响,而铁耗将使电机推力有所下降;②解析过程未考虑负序电流的影响,而负序电流所产生的反向行波磁场将产生与运动方向相反的电磁推力;③尽管模型中考虑了直接耦合等效漏阻抗,但次级同心笼同样会与直接耦合的脉振磁场相互作用,影响电磁推力;④由于两套绕组均为单层整距绕组,因此绕组将产生较大的5次和7次空间谐波,这些谐波对电机低速时的平均推力影响较为显著。除上述四点外,解析结果高于实验结果还有另外一个原因,即样机的物理气隙在7.1~8.3mm之间,平均气隙小于设计气隙,理论上应该产生更大的电磁推力,但样机的轴向安装存在一定的偏差,使得原本应该对齐的初、次级铁心在轴向上错开约10mm,使得有效横向长度变短,综合作用下电机推力下降。
(3)端部效应影响程度。与等效旋转电机的特性曲线即无端部效应特性曲线相比,NLS-LDFM的特性曲线下降较为明显。进一步分析可知,电机在全速度范围内,修正系数Ke的变化范围只有0.88~1,而直接耦合产生的等效漏阻抗使两套绕组的漏抗显著增加;加之电机气隙较大,励磁电抗较小,漏抗占励磁电抗比重较高,分压较多,因此相较于动态端部效应,直接耦合对电机性能的影响更为严重。
本文提出了一种考虑端部效应的同心笼次级直线双馈电机等效电路,详细分析了静态及动态端部效应的产生机理及作用规律,并通过实验验证了相关分析的合理性。研究表明,该类直线电机的端部效应主要包含两部分:由脉振磁场引起的初级绕组直接耦合与过渡过程中同心笼引起的等效阻抗变化。
直接耦合现象在等效电路中表现为初级额外漏阻抗。漏阻抗大小与耦合强弱呈正相关,与电机运行速度无关。直接耦合将在全速度范围内削弱电机的电磁推力,并引入不平衡电动势谐波。由于引发直接耦合的脉振磁场强度将随电机极对数增多而减弱,因此可通过提高电机极对数来削弱直接耦合影响。
等效阻抗变化大小可用等效电路中次级支路的修正系数来描述。修正系数大小与电机运动周期、同心笼时间常数、次级初始位置等因素有关。这种相关性将使得电机参数随工况变化较大,影响电机电磁推力及控制精度。由于当同心笼时间常数远小于电机运动周期时,修正系数趋近于1,因此可通过优化同心笼结构或同时增加电机纵向长度和极对数来减小等效阻抗的变化。
本文的研究工作及方法可有效分析同心笼次级直线双馈电机的端部效应,并能帮助建立合理的等效电路模型,为后续电机的电磁设计、特性分析、控制策略等提供一定的指导。
参考文献
[1] Becetti B. Design and optimization of linear doubly-fed induction machine for wireless charging operation of novel vactrain system[D]. Delft: Delft University of Technology, 2021.
[2] Saifkhani F, Wallace A K. A linear brushless doubly-fed machine drive for traction applications[C]//1993 Fifth European Conference on Power Electronics and Applications, Brighton, UK, 1993, 5: 344-348.
[3] Seifkhani F. Investigation, analysis and design of the linear brushless doubly-fed machine[D]. Corvallis: Oregon State University, 1991.
[4] Yang Bo, Grotstollen H. Application, calculation and analysis of doubly fed long stator linear motor for NBP test track[J]. Automatika, 2003, 44(3-4): 123-127.
[5] Yang Bo, Henke M, Grotstollen H. Pitch analysis and control design for the linear motor of a railway carriage[C]//Conference Record of the 2001 IEEE Industry Applications Conference, 36th IAS Annual Meeting (Cat. No.01CH37248), Chicago, IL, USA, 2001: 2360-2365.
[6] Pottharst A, Henke M, Grotstollen H. Power supply of the longstator linear motor of the NBP-test track[J]. Automatika, 2003, 44(1-2): 55-58.
[7] 曾志凌. 城轨列车双馈直线驱动电机电磁计算与设计[D]. 成都: 西南交通大学, 2015.
[8] Kang Jinsong, Mu Siyuan, Ding Hao. Long stator linear doubly-fed motor for high-speed maglev integrated suspension, propulsion and contactless power supply[C]//2021 13th International Symposium on Linear Drives for Industry Applications (LDIA), Wuhan, China, 2021: 1-5.
[9] Chen Manying, Wu Lijian, Zhang Liu, et al. A novel doubly-fed flux reversal linear machine with armature windings wound on both stator and mover teeth[J]. IEEE Access, 2020, 8: 35563-35571.
[10] Cao Ruiwu, Huang Wenxin. A double fed three-phase flux-switching linear motor with complementary magnet circuit for urban rail transit[C]//2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 2014: 1-5.
[11] 龙遐令. 直线感应电动机的理论和电磁设计方法[M]. 北京: 科学出版社, 2006.
[12] 徐伟, 李耀华, 孙广生, 等. 基于绕组函数法的大功率单边直线感应电机牵引特性研究[J]. 中国电机工程学报, 2008, 28(33): 54-60.
Xu Wei, Li Yaohua, Sun Guangsheng, et al. Tractive performance research of high power single linear induction motor based on winding function method[J]. Proceedings of the CSEE, 2008, 28(33): 54-60.
[13] Xu Wei, Islam M R, Pucci M. Advanced linear machines and drive systems[M]. Singapore: Springer Singapore, 2019.
[14] 张千, 刘慧娟, 马杰芳, 等. 考虑后退行波的长初级双边直线感应电机电磁性能计算[J]. 电工技术学报, 2020, 35(7): 1398-1409.
Zhang Qian, Liu Huijuan, Ma Jiefang, et al. Calculation of electromagnetic performance for long primary double sided linear induction motors considering backward traveling wave[J]. Transactions of China Electrotechnical Society, 2020, 35(7): 1398-1409.
[15] 程明, 文宏辉, 曾煜, 等. 电机气隙磁场调制行为及其转矩分析[J]. 电工技术学报, 2020, 35(5): 921-930.
Cheng Ming, Wen Honghui, Zeng Yu, et al. Analysis of airgap field modulation behavior and torque component in electric machines[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 921-930.
[16] Ge Jian, Xu Wei, Liu Yi, et al. Investigation on winding theory for short primary linear machines[J]. IEEE Transactions on Vehicular Technology, 2021, 70(8): 7400-7412.
[17] Duncan J. Linear induction motor-equivalent-circuit model[J]. IEE Proceedings B (Electric Power Applications), 1983, 130(1): 51-57.
[18] 徐伟, 李耀华, 孙广生, 等. 短初级单边直线感应电机新型等效电路[J]. 中国电机工程学报, 2009, 29(9): 80-86.
Xu Wei, Li Yaohua, Sun Guangsheng, et al. New equivalent circuits of short primary single-sided linear induction motor[J]. Proceedings of the CSEE, 2009, 29(9): 80-86.
[19] Roberts P C, McMahon R A, Tavner P J, et al. Equivalent circuit for the brushless doubly fed machine (BDFM) including parameter estimation and experimental verification[J]. IEE Proceedings - Electric Power Applications, 2005, 152(4): 933-942.
[20] McMahon R A, Roberts P C, Wang X, et al. Performance of BDFM as generator and motor[J]. IEE Proceedings - Electric Power Applications, 2006, 153(2): 289-299.
Equivalent Circuit for Nested-Loop Secondary Linear Doubly-Fed Machine Considering End Effect
Abstract Research on the nested-loop secondary linear doubly-fed machine (NLS-LDFM) is quite scarce. The feature of its end effect is not clear along with no appropriate equivalent circuit, which restricts the further development of this kind of machine. In view of the problem, the static and dynamic end effects of NLS-LDFM are studied separately in this paper. And the equivalent circuit considering the end effect is built. Firstly, the mechanism of direct coupling by static end effect is clarified based on the winding theory for short primary linear machine. The characteristics of induced electromotive force generated by direct coupling are analyzed and the equivalent impedance is deduced. Secondly, the transition process of nested loop during steady-state operation of NLS-LDFM is analyzed. And the dynamic end effect correction coefficient is calculated. Thirdly, the equivalent circuit of NLS-LDFM is built based on the analysis of end effect and the traditional equivalent circuit of brushless doubly-fed machine. And the expression of thrust is derived. Finally, the rationality of the analysis results is indirectly verified by the finite element simulation and experiment for static and dynamic end effect respectively.
keywords:Linear doubly-fed machine (LDFM), nested-loop secondary, end effect, equivalent circuit
DOI:10.19595/j.cnki.1000-6753.tces.220005
中图分类号:TM359
国家自然科学基金面上项目(51877093,52277050)、湖北省重大科技创新项目(2019AAA026)、四川省重点研发项目(2021YFG0081)、深圳市自然科学基金面上项目(JCYJ20190809101205546)资助。
收稿日期 2022-01-03
改稿日期 2022-03-05
葛 健 男,1994年生,博士研究生,研究方向为直线双馈电机运行理论。E-mail:gejian1994@hust.edu.cn
徐 伟 男,1980年生,教授,博士生导师,研究方向为直线电机设计及控制。E-mail:weixu@hust.edu.cn(通信作者)
(编辑 李冰)