 (1)
(1)
摘要 无速度传感器感应电机在低频区运行时,转速可观测性较差。特别是在定子零频工况时,转速不可观测。为此,该文提出了一种基于电流优化的无速度传感器感应电机零频穿越策略。首先,推导观测转速与转速误差的传递函数,证明零频工况下转速不可观测的根本原因;其次,介绍所提出零频穿越策略的原理,并对典型工况电机运行点的变化进行分析,保证在低定子频率下的转速可观测性;此外,为了在零频穿越过程中获得最优电流,提出一种主动零频穿越边界点电流轨迹优化方法,结合转矩、电流和可观测性等限制条件,将转速能观性和最小定子电流作为优化目标,推导出主动零频穿越边界点优化选择方法;最后,在2.2kW的感应电机实验装置上验证所提方法的有效性。
关键词:感应电机 无速度传感器控制 零频穿越 电流优化
无速度传感器感应电机(Speed-Sensorless Induction Motor Drives, SSIMD)以其结构简单、维护便利、可靠性高等优点,在数控机床、牵引传动、海上钻探等领域得到了广泛的应用[1-3]。基于模型法的感应电机(Induction Motor, IM)转速观测方法,如模型参考自适应系统[4]、全阶磁链观测器[5]、滑模观测器[6],在低频运行工况下转速可观测性差,严重制约了无传感器感应电机系统的应用和大规模推广。比如,海上石油钻井绞车缓慢升降钻管,电机将始终工作在近稳态低定子频率状态,甚至接近零同步频率工况。然而,对于无速度传感器感应电机系统,无法在低频工况下长时间稳定运行。
为了提高无速度传感器感应电机系统的低频工况运行性能,许多学者做了大量的研究工作。文献[7]详细介绍了无速度传感器感应电机极低速发电运行区不稳定的问题。文献[8]利用自适应控制理论,推导转速估计值及估计磁链稳定的充分必要条件,进而给出了系统发生不稳定现象的转矩边界值。文献[9]提出一种反相高频注入方法,通过分析电机模型中的凸极效应来观测转子位置。然而,标准笼型感应电机异向性并不明显,无法提取准确的转速/位置信息。文献[10]通过设计全阶观测器来观测转速增益,实现了低速发电模式下准确地估计电机速度。文献[11]通过设计观测器反馈矩阵和速度自适应率,减小低速发电不稳定区域,提高了无速度传感器感应电机系统稳定性。文献[12]通过图形化思路设计多重误差反馈矩阵,兼顾了低速发电工况下稳定性和观测器参数鲁棒性。文献[13]通过选择合适的反馈矩阵增益参数,提升了无速度传感器感应电机的稳定性和动态性能。文献[14]针对低速发电工况性能差的问题,提出一种基于最小励磁电流误差原则的反馈矩阵设计方法,提升了低速运行性能。文献[15]构建了全局稳定的自适应观测器,实现除零频外的低速发电区稳定运行。可以发现,作为传统低速发电不稳定区的边界,零频稳定运行更加难以实现。因此,在定子零频工况下,无速度传感器感应电机转速是不可观测的[16]。
以上基于转速自适应修正和反馈矩阵设计的改进方法能够显著提升无速度传感器感应电机在低速发电工况下运行的稳定性。但是,仍然无法解决近稳态工况下无速度传感器感应电机在定子零频工况附近运行的转速可观测性问题[17]。文献[18]中,作者从转速观测的传递函数出发,解释了零频工况转速不可观测的根本原因。为了解决低频工况下的可观测性问题,文献[19]提出一种基于观测器虚拟电压注入的方法,通过在全阶磁链观测器中注入电压误差,解决系统状态变量的能观性,最终实现系统在低同步转速区域的稳定运行。文献[20]提出一种针对感应电机虚拟电压注入法的在线切换系统,同时满足低频工况的稳定性和控制精度要求。文献[21]通过在时域上重新配置观测器零极点,提高了低频运行工况下转速可观测性。文献[22]通过引入转速可观测指标,实时计算最优的转子磁链指令值,避免电机运行在转速不可观测的工况点,达到维持电机转速可观测性的目的。文献[23]针对自适应观测器在近定子零频工况的可观测性问题,提出一种主动磁链控制的概念,低频工况下通过控制转子磁链指令来避免零定子频率工况。然而,转子磁链实时计算对电机参数和运行工况变化敏感,在临界状态会引入严重的噪声和振荡。文献[24]为了保证转速可观测性,提出了一种基于励磁电流自适应控制的低频穿越方法。然而励磁电流自适应控制的设计策略并没有考虑到零频穿越(Zero Frequency Ride-Through, ZFRT)边界点轨迹规划和电流效率的问题。
针对低频工况转速可观测性及电流轨迹规划问题,本文提出一种基于电流优化的无速度传感器感应电机零频穿越(Current Optimization Zero Frequency Ride-Through, CO-ZFRT)策略,通过设计电机励磁电流自适应控制策略,实现近稳态低频/零频工况下的同步转速控制,并分别在转差转速-转子转速(ωs-ωr)坐标系和电磁转矩-转子转速(Te-ωr)坐标系下介绍了零频穿越过程电机运行点变化,验证了所提出的方法能够提高无速度传感器感应电机在近稳态零频工况的转速可观测性。进一步,结合转矩限制、电流限制和可观测限制条件,将转速能观性和电流最小作为优化目标,推导了主动零频穿越边界点轨迹优化选择方法,从而实现零频穿越过程中电流和效率的最优化。
参考两相静止αβ坐标系下感应电机T型等效模型,选取定子电流和转子磁链作为状态变量,感应电机数学模型可表示为[25]
(1)
式中, ,
, ,
, ,分别为定子电流、转子磁链和定子电压;ωe、ωr、ωs分别为同步转速、转子转速、转差转速;Rs和Rr分别为定子电阻和转子电阻;Ls、Lr和Lm分别为定子电感、转子电感和互感;Tr为转子时间常数;
,分别为定子电流、转子磁链和定子电压;ωe、ωr、ωs分别为同步转速、转子转速、转差转速;Rs和Rr分别为定子电阻和转子电阻;Ls、Lr和Lm分别为定子电感、转子电感和互感;Tr为转子时间常数; ,
, ,
, ,
, ,
, ;
; ,
, ,
, ,
, ,
, ,
, ;
;![]() ,
,![]() 。
。
在两相静止坐标系下,选择转子转速为观测变量,自适应全阶观测器状态方程可以表示为
 (2)
(2)
其中

式中, 、
、 和
和 分别为定子电流、转子磁链和转子转速的观测量。
分别为定子电流、转子磁链和转子转速的观测量。
根据数学模型式(1)和观测器方程式(2),可得观测器误差方程为
 (3)
(3)
其中


通过李雅普诺夫稳定性定理推导转速观测自适应律。首先,选取李雅普诺夫函数为[26]
 (4)
(4)
式中, 为正实数。
为正实数。
根据李雅普诺夫稳定性定理,使系统稳定的充分必要条件为李雅普诺夫函数V的导数为负定。可得到选取李雅普诺夫函数的微分表达式为
由于式(5)中第一项为负,若令后三项等于0,则可保证dV/dt为负,可推导转速自适应律为
 (6)
(6)
由于转子磁链误差无法获得,因此将式(6)右侧磁链误差项忽略,可得到转速自适应律为
式中,Kp和Ki为转速观测器自适应律系数;s为拉普拉斯算子。
对观测器误差方程式(3)作拉氏变换,可得
 (8)
(8)
求解误差方程,可以得到电流误差的表达式为
 (9)
(9)
式中
 ;
;
把式(9)代入转速观测自适应律式(7)中,可以得到
![]() (10)
(10)
其中

因此,可以绘制基于自适应全阶观测器的转速观测框图,如图1所示。

图1 基于自适应全阶观测器的转速观测框图
Fig.1 Block diagram of adaptive full order observer-based speed estimation scheme
在稳态工况下,增益 可以化简为
可以化简为
 (11)
(11)
当同步转速为零时,可以得到
 (12)
(12)
因此,在同步转速为零时,增益 恒等于零。那么图1中所示的基于模型法的转速观测将会发散,观测转速无法收敛至实际值。
恒等于零。那么图1中所示的基于模型法的转速观测将会发散,观测转速无法收敛至实际值。
在两相同步旋转坐标系中,同步转速和转差转速分别表示为
 (13)
(13)
同时,感应电机电磁转矩表示为
 (14)
(14)
式中, ,
, 为极对数。
为极对数。
在感应电机矢量控制系统中,励磁电流通常设置为定值。由式(13)、式(14)可知,电机转差转速和转矩电流线性正相关。因此,在转速不变时,增加电机负载,电机转矩电流增加,转差转速增大。本文中,在维持恒定转矩的前提下,通过调整励磁电流给定值,实现对转差转速的控制,从而在低频工况下,实时改变电机同步转速,维持可观测边界。矢量控制系统中励磁电流指令值可表示为
 (15)
(15)
式中, 为励磁电流初始指令值;
为励磁电流初始指令值; 为励磁电流指令值变化量。
为励磁电流指令值变化量。
式(15)中,可以通过转差和转速变化率估计励磁电流指令值变化量,并通过实验试错法将其调整到最优值。通过自适应控制励磁电流指令值变化量,达到低频/零频工况下同步转速控制的目的。无传感器感应电机零频穿越运行点变化示意如图2所示。零频穿越过程分为两部分:①同步转速环控制器,实现低频工况下同步转速收敛至所设定的限制值(A1至A3,A5至A7);②主动零频穿越控制,励磁电流阶跃变化,实现同步频率阶跃并完成主动的过零穿越过程(A3至A5)。
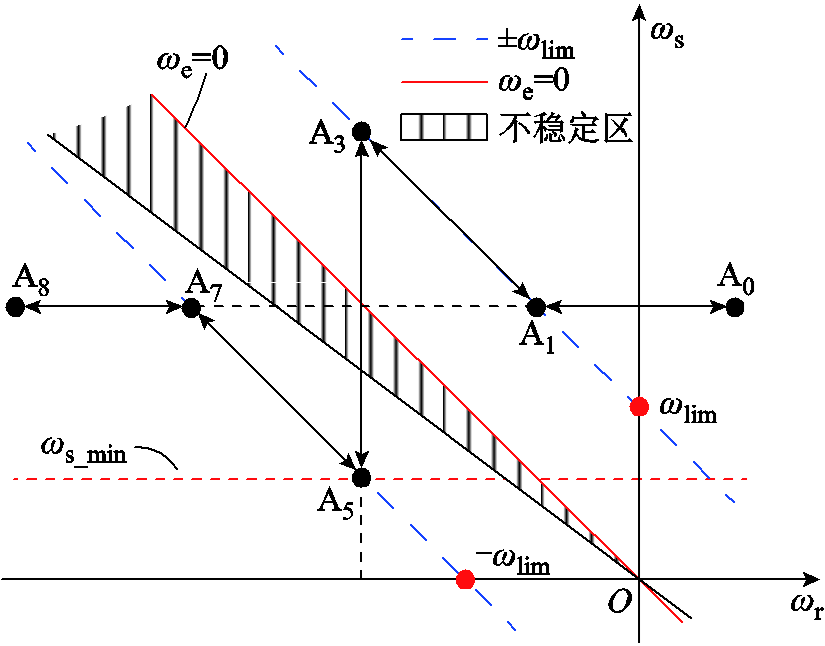
图2 零频穿越电机运行点变化示意图
Fig.2 IM operating point trajectory with CO-ZFRT method
图2中,感应电机带恒定负载,转速逐渐减小,感应电机运行工况点分别穿过零速运行、电磁制动区、零频运行、发电运行区域,即从A0到A1,再沿虚线到A7,再到A8。然而,低频工况下转速可观测性差,无传感器系统难以实现稳定的穿越过程。图中蓝色虚线为本文所设置的同步频率限制值,通过控制感应电机励磁电流,使得低频工况下,运行点收敛至蓝色虚线之上。当电机运行点到达A1时,随着转子转速减小,同步转速环控制器生成励磁电流减小的指令,转差会逐渐增大,从而使得电机运行点能够沿着直线A1A3运行。相似地,当电机运行点到达A5时,同步转速环控制器生成励磁电流减小的指令,转差逐渐增大,电机运行点能够沿着直线A5A7运行。然而,A3至A5间的主动零频穿越通过设置触发条件,在极短的时间内完成主动的过零穿越,其边界点的选择详细推导见2.3节。从图2中的整个过程看,无速度传感器感应电机成功地完成了定子电流零频穿越过程,且实现了转速可观测。
在Te-ωr坐标系中分步绘制图2所示的感应电机零频穿越过程,如图3所示。在图3中,根据转差转速式(13)和电磁转矩式(14),推导零频线为
 (16)
(16)
求解式(16),在Te-ωr坐标系中的定子电流零频线可以表示为
 (17)
(17)
根据式(17),在图3中绘制实际零频线跟随电机运行工况点的变化趋势。图3a和图3f中红色点划线为零频线,图3b~图3e中实际零频线分别为黄色、绿色、蓝色、紫色点划线(其中红色虚线为原始零频线)。可以发现,同步转速在电机运行工况点始终与实际零频线之间存在固定的差值,即文中所设置的同步转速限制值。从图3中可见,定子电流零频线随着励磁电流的减小而逆时针旋转,完成同步转速环控制,使得不同工况下同步转速收敛至所设置的限制值。但是,从图3c到图3d的过程可知,通过产生阶跃变化的励磁电流指令,定子电流零频线顺时针旋转,电机完成了主动零频穿越。因此,通过控制励磁电流和实际零频线,保证了低频工况下转速可观测边界。从而,在Te-ωr坐标系中,能够实现任何电机运行工况点转速可观测。
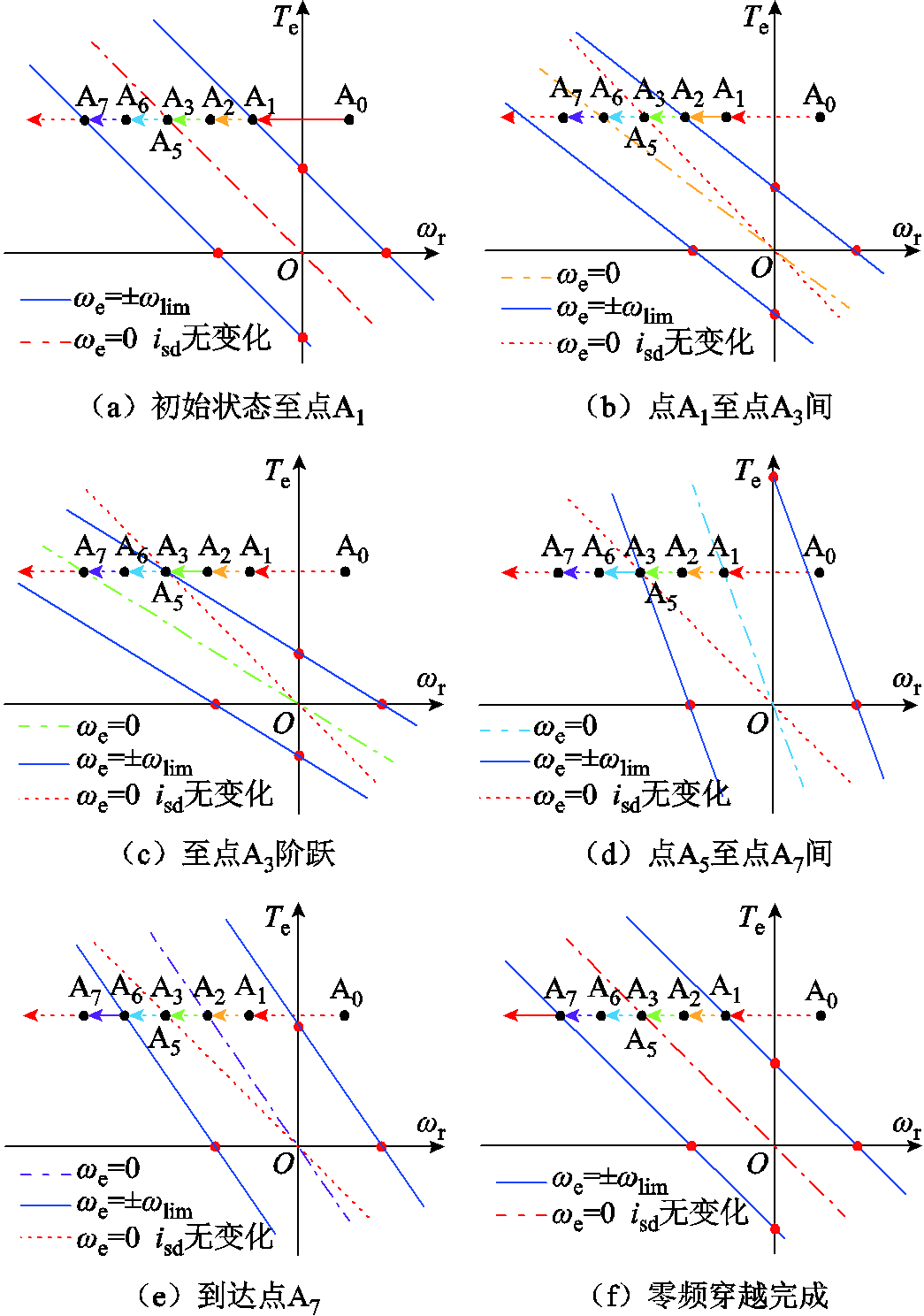
图3 Te-ωr坐标系下无速度传感器感应电机零频穿越定子电流零频线变化示意图
Fig.3 Changes of the zero-stator frequency line of SSIMD during ZFRT in Te-ωr frame
结合转矩关系式(14),定子电流幅值可以表示为
 (18)
(18)
根据式(18),可以在不同励磁电流和电磁转矩工况下,绘制定子电流幅值的变化示意图,如图4所示。主动零频穿越边界点有相同的纵坐标,且纵坐标定子电流会随转矩的增大而增大。为了完成主动零频穿越,点A3和A5之间的转差之差需要满足最小转差限制,即
 (19)
(19)
式中, 和
和 分别为A3和A5点的转差转速;
分别为A3和A5点的转差转速; 为最小同步转速限制值。
为最小同步转速限制值。
结合转矩限制、电流限制和可观测限制条件,图4中边界点A3和A5满足限制条件
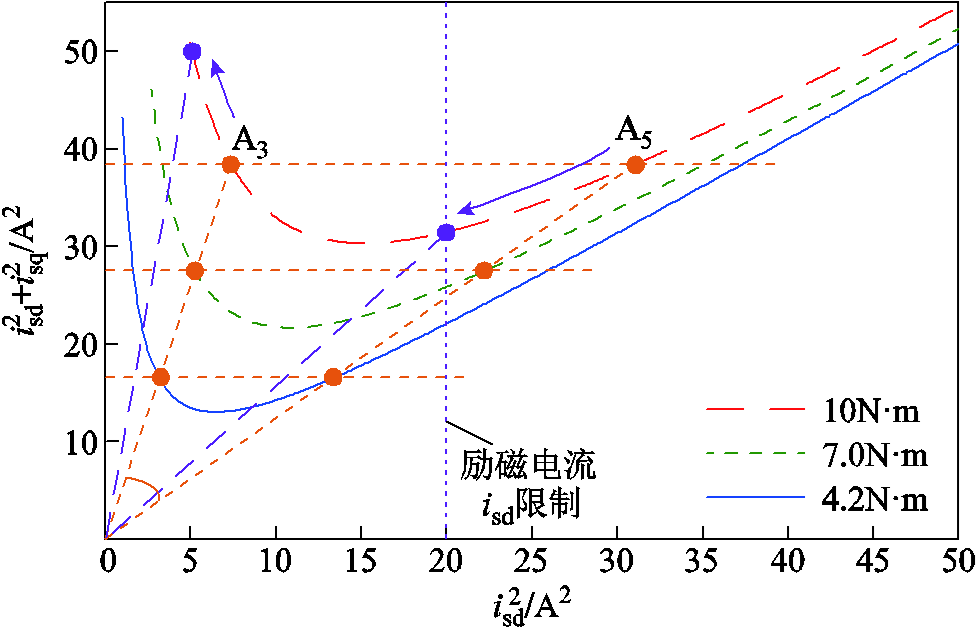
图4 定子电流幅值随励磁电流和电磁转矩的变化示意图
Fig.4 Stator current magnitude against different magnetizing current and electromagnetic torque
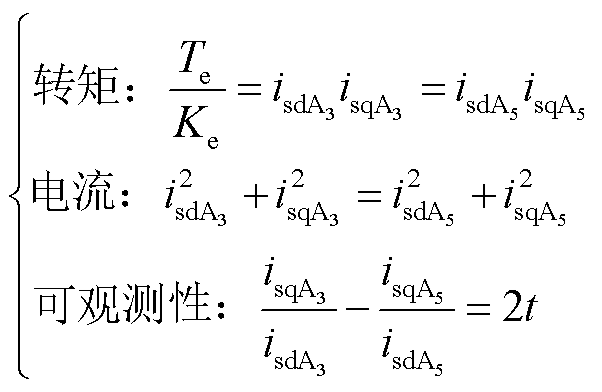 (20)
(20)
式中, ;
; 、
、 、
、 、
、 分别为边界点A3和点A5的励磁电流和转矩电流。
分别为边界点A3和点A5的励磁电流和转矩电流。
当转矩较小时,通过求解式(20),可得图4中边界点A3和A5的坐标分别为
 (21)
(21)
由于磁场饱和效应,电机励磁电流无法持续增加。在矢量控制系统中,将励磁电流指令值最大值记为IMmax。图4中随着转矩增大,点A5的横坐标将超过最大励磁电流限制,此时,为了满足最小边界点之间的转差之差要求,边界点A3需要向左移动。根据式(21),可以得到临界转矩值为
 (22)
(22)
当转矩大于临界转矩时,边界点A5的励磁电流值为最大励磁电流IMmax。求得点A3和A5的坐标为
 (23)
(23)
式中, 。
。
由于点A5位于同步转速限制值与最小转差转速的交点,可以求得点A5的转子转速为
 (24)
(24)
因此,电机在不同的负载工况下,主动零频穿越边界点可以分别选择为式(21)或式(23)。感应电机运行工况点在边界点A3和A5之间瞬时切换。当负载大于临界转矩时,也可以由条件式(24)触发主动零频穿越。基于电流优化的零频穿越方法程序执行流程如图5所示。
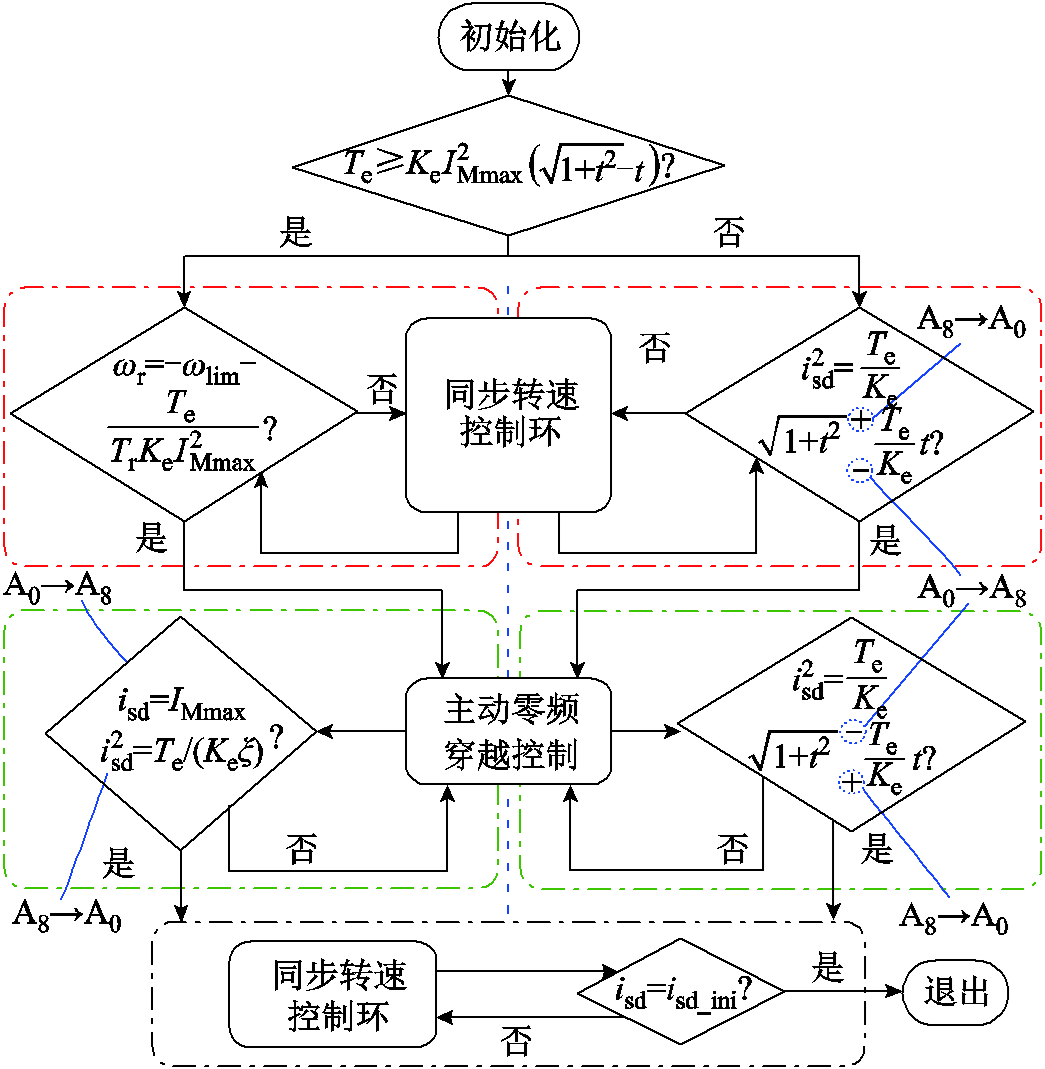
图5 基于电流优化的零频穿越方法流程
Fig.5 Flowchart of CO-ZFRT method during ZFRT
为验证上述实施方案的有效性,采用2.2kW感应电机对拖平台进行实验论证,实验平台如图6所示。本平台包含两个相同的2.2kW笼型感应电机,电机参数见表1。此外,平台还包括两台3.7kW变频器,主控芯片为意法半导体ARM STM32F103。负载变频器驱动负载电机,工作在有速度传感器转矩运行模式,提供设定转矩。测试变频器驱动测试电机,测试电机工作在无速度传感器矢量控制转速模式,给定值为转速指令,用于测试所提出的算法。负载变频器和测试变频器控制算法均基于转子磁场定向矢量控制实现,PWM开关频率为6kHz。励磁电流给定值isdref为50%额定电流。实验中电磁转矩根据式(14)计算得到。

图6 2.2kW感应电机实验平台
Fig.6 2.2kW IM experimental setup
表1 2.2kW感应电机参数
Tab.1 2.2kW IM parameters
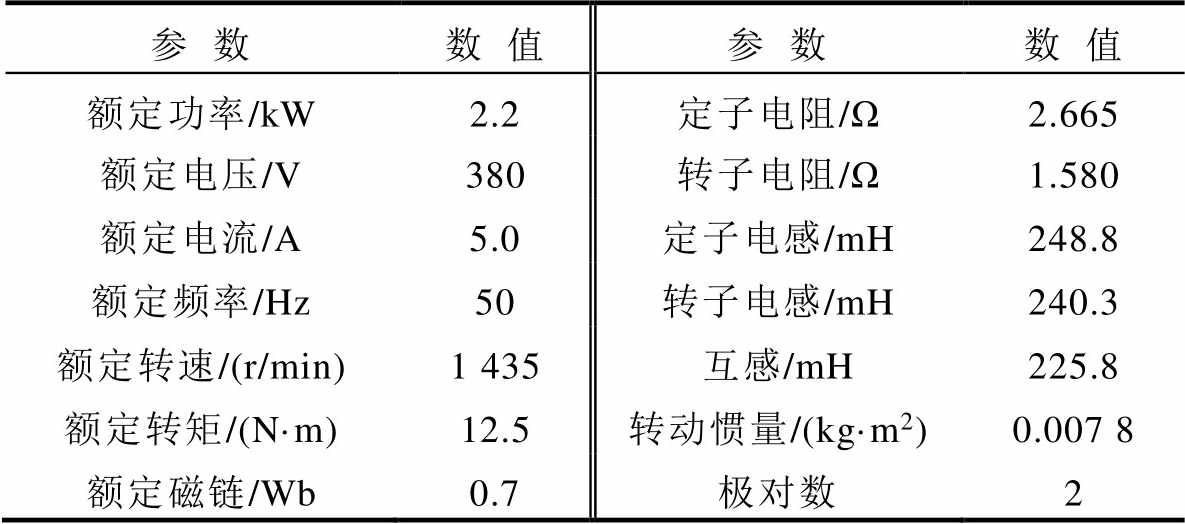
参数数值参数数值 额定功率/kW2.2定子电阻/Ω2.665 额定电压/V380转子电阻/Ω1.580 额定电流/A5.0定子电感/mH248.8 额定频率/Hz50转子电感/mH240.3 额定转速/(r/min)1435互感/mH225.8 额定转矩/(N·m)12.5转动惯量/(kg·m2)0.0078 额定磁链/Wb0.7极对数2
本节实验为了模拟电机近稳态运行工况,转速从150r/min到-150r/min的时间设定为80s,转速加速度为-0.062 5r/s2(-225r/min2)。主动零频穿越边界点A3、A5的励磁电流分别设置为26%和60%额定电流。
采用反馈矩阵的无速度传感器感应电机零频穿越测试结果如图7所示,其中ia为电机相电流。在电机运行工况点接近零频线之前,估计转速均可收敛到实际转速,且系统稳定运行。然而,当电机运行工况点到定子电流零频线附近时,估计转速发散,系统出现不稳定现象。虽然反馈矩阵可以消除低速发电运行不稳定区域,但由于定子电流零频工况转速不可观测,因此,在近稳态工况下,无传感器感应电机系统在接近零频线附近时仍然会出现失稳现象。
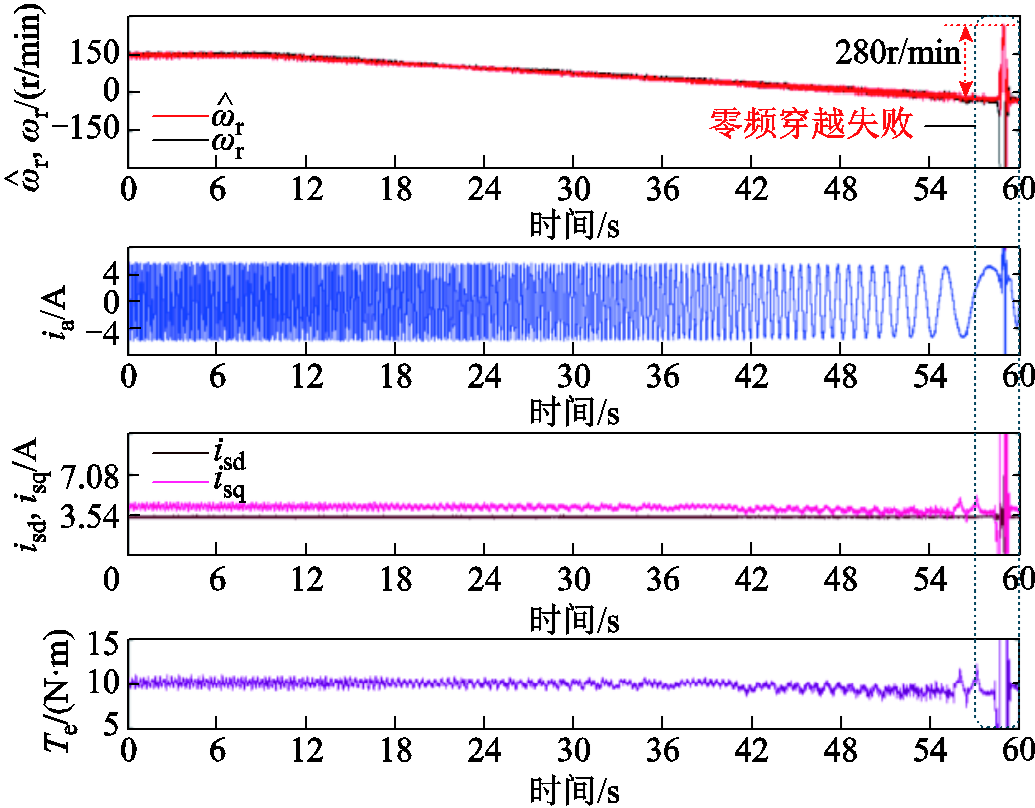
图7 采用反馈矩阵的无传感器感应电机零频穿越
Fig.7 ZFRT of SSIMD with feedback matrix
为了提升低频运行工况下转速可观测性,采用本文所提出的CO-ZFRT方法,测试结果如图8所示。实验测试中,加入了反馈矩阵以减小低速发电运行不稳定区,改善零频穿越中边界点A5的可观测边界。在CO-ZFRT方法使能区间,励磁电流一直在跟随工况点自适应变化,使得同步转速收敛至同步转速限制值。当执行CO-ZFRT时,由于isd和isq的变化,电机电流幅值发生了变化。在70s时,励磁电流isd阶跃增大,电机运行点从点A3瞬时穿越至点A5,即完成主动零频穿越过程。在完成主动零频穿越瞬间,电机相电流和电磁转矩均出现了脉动现象,但其后迅速收敛,电机仍然可以保持稳定运行。主动零穿后,励磁电流和转矩电流逐渐恢复至初始值,零频穿越过程完成。对比采用反馈矩阵的测试结果图7,在零频穿越过程中,采用本文提出的CO-ZFRT方法,转速可观测性始终得到满足。
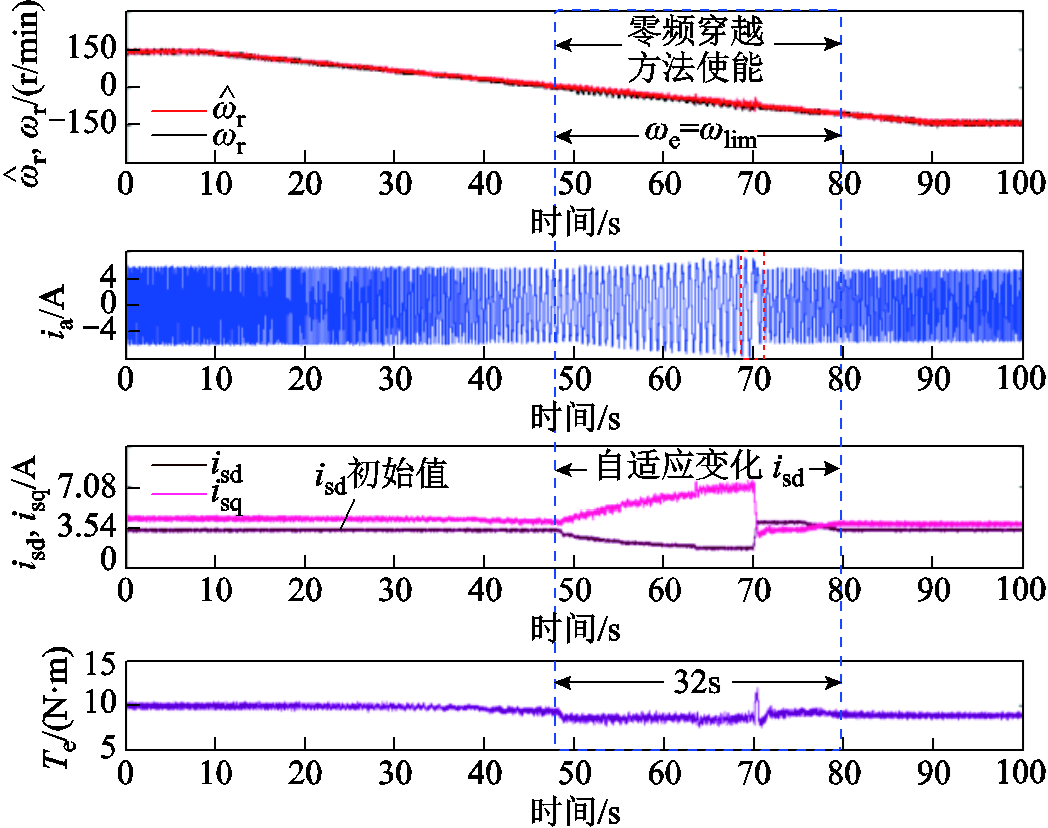
图8 采用CO-ZFRT的无传感器感应电机零频穿越
Fig.8 ZFRT of SSIMD with feedback matrix and CO-ZFRT
根据图8的实验结果,绘制无速度传感器感应电机零频穿越过程中电机运行点变化轨迹,如图9所示。电流矢量的变化轨迹如图9a所示,结果与理论分析相吻合。图9b为在ωs-ωr坐标系中描述运行点轨迹的变化,验证了图2的理论分析。
本节实验分别是在负载小于和大于临界转速工况下进行的。在轻载工况下,主动零频穿越边界点可以通过式(21)进行选择,实验结果如图10所示;在重载工况下,由条件式(24)触发主动零频穿越,实验结果如图11所示。在主动零频穿越之前和之后,励磁电流逐渐减小,同步转速收敛至其限制值。
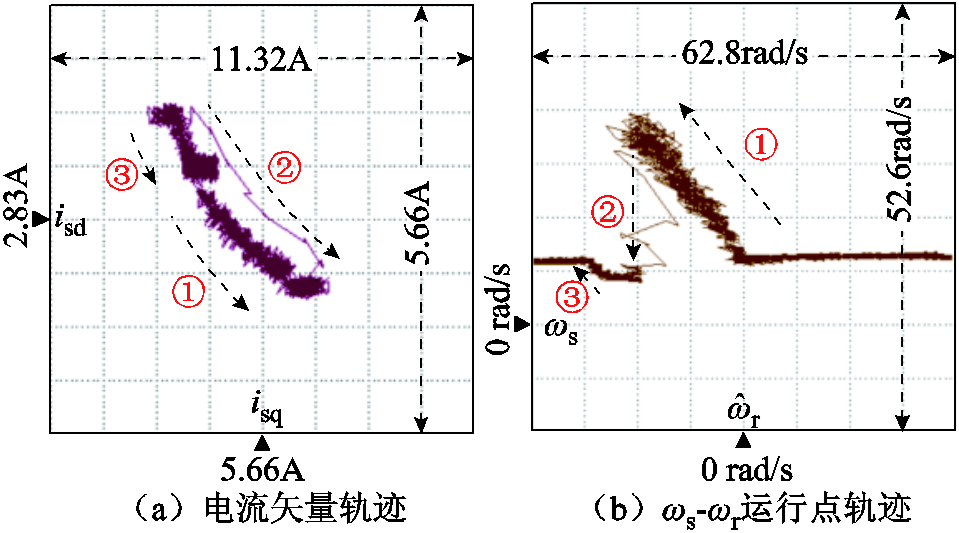
图9 零频穿越过程无速度传感器感应电机运行点轨迹图
Fig.9 Locus of operating point for SSIMD during ZFRT

图10 负载小于临界转矩时零频穿越实验
Fig.10 Experiments during ZFRT when applied load less than boundary load

图11 负载大于临界转矩时零频穿越实验
Fig.11 Experiments during ZFRT when applied load larger than boundary load
在电流优化实验图10b和图11b中,可以发现电机电流有效值的二次方I2和相电流均比无电流优化实验图10a和图11a中小,从而在执行CO-ZFRT方法时实现了电流优化。对比图10a和图10b,无电流优化时电机运行工况点在完成零频穿越之后电流显著增大。这表明没有电流优化时的边界点选择并不合理,主动零频穿越边界点需要向左移动。同样地,对比图11a和图11b,可以发现电流优化时电流有效值的二次方I2和相电流在完成零频穿越之前较小。这表明在无电流优化时,主动零频穿越边界点需要向右移动,并把A5点励磁电流设置为IMmax。对比实验验证了所提出的电流优化方法能够有效地选择最优主动零频穿越点,实现零频穿越过程中的最优电流。
本文介绍了一种基于电流优化的无速度传感器感应电机零频穿越策略。与传统方法进行实验对比,可证明所提出的方法能够提高零频工况下转速可观测性。同时,针对主动零频穿越边界点选择,提出了一种主动零频穿越电流边界点优化方法,结合转矩限制、电流限制和可观测限制条件,直接推导了主动零频穿越边界点的理想位置,实现了无速度传感器感应电机最优零频穿越。此外,推导了重载条件下,根据转子转速触发主动零频穿越的条件。实验表明,与传统方法相比,该方法在过零前后均能获得较低的电流和较高的效率。
参考文献
[1] Xu Dianguo, Wang Bo, Zhang Guoqiang, et al. A review of sensorless control methods for AC motor drives[J]. CES Transactions on Electrical Machines and Systems, 2018, 2(1): 104-115.
[2] 易山, 卢子广, 袁凯南, 等. 中低频轻载工况下引入虚拟电抗的感应电机变频调速系统稳定控制[J]. 电工技术学报, 2022, 37(8): 1959-1971.
Yi Shan, Lu Ziguang, Yuan Kainan, et al. The stability control of induction motor variable frequency speed regulation system injected with virtual reactance under low frequency and light load condition[J]. Transactions of China Electrotechnical Society, 2022, 37(8): 1959-1971.
[3] 王勃, 王天擎, 于泳, 等. 感应电机电流环非线性积分滑模控制策略[J]. 电工技术学报, 2021, 36(10): 2039-2048.
Wang Bo, Wang Tianqing, Yu Yong, et al. Nonlinear integral sliding mode control strategy for current loop of induction motor drives[J]. Transactions of China Electrotechnical Society, 2021, 36(10): 2039-2048.
[4] 李争, 安金峰, 肖宇, 等. 基于自适应观测器的永磁同步直线电机模型预测控制系统设计[J]. 电工技术学报, 2021, 36(6): 1190-1200.
Li Zheng, An Jinfeng, Xiao Yu, et al. Design of model predictive control system for permanent magnet synchronous linear motor based on adaptive observer[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1190-1200.
[5] 沈凤龙, 满永奎, 王建辉. 基于改进全阶状态观测器的异步电机速度估算系统[J]. 微电机, 2019, 52(6): 34-39, 50.
Shen Fenglong, Man Yongkui, Wang Jianhui. Speed estimation system of induction motor based on improved full order observer[J]. Micromotors, 2019, 52(6): 34-39, 50.
[6] 武志涛, 李帅, 程万胜. 基于扩展滑模扰动观测器的永磁直线同步电机定结构滑模位置跟踪控制[J]. 电工技术学报, 2022, 37(10): 2503-2512.
Wu Zhitao, Li Shuai, Cheng Wansheng. Fixed structure sliding mode position tracking control for permanent magnet linear synchronous motor based on extended sliding mode disturbance observer[J]. Transactions of China Electrotechnical Society, 2022, 37(10): 2503-2512.
[7] Kubota H, Sato I, Tamura Y, et al. Regenerating-mode low-speed operation of sensorless induction motor drive with adaptive observer[J]. IEEE Transactions on Industry Applications, 2002, 38(4): 1081-1086.
[8] 宋文祥, 周杰, 朱洪志, 等. 基于自适应全阶观测器的感应电机低速发电运行稳定性[J]. 电工技术学报, 2014, 29(3): 196-205.
Song Wenxiang, Zhou Jie, Zhu Hongzhi, et al. Regenerating-mode stabilization of induction motors based on adaptive full-order observer[J]. Transactions of China Electrotechnical Society, 2014, 29(3): 196-205.
[9] 张杰, 柴建云, 孙旭东, 等. 双三相异步电机反相高频注入无速度传感器控制[J]. 中国电机工程学报, 2015, 35(23): 6162-6171.
Zhang Jie, Chai Jianyun, Sun Xudong, et al. Sensorless control of dual three phase induction machines by antiphase high frequency signal injection[J]. Proceedings of the CSEE, 2015, 35(23): 6162-6171.
[10] Maksoud H A, Shaaban S M, Zaky M S, et al. Performance and stability improvement of AFO for sensorless IM drives in low speeds regenerating mode[J]. IEEE Transactions on Power Electronics, 2019, 34(8): 7812-7825.
[11] Luo Cheng, Wang Bo, Yu Yong, et al. Operating-point tracking method for sensorless induction motor stability enhancement in low-speed regenerating mode[J]. IEEE Transactions on Industrial Electronics, 2020, 67(5): 3386-3397.
[12] Luo Cheng, Li Ruhan, Yang Kai, et al. Graphical multiple-error feedback matrix design for stability and robustness enhancement of speed-sensorless induction motor drives[J]. IEEE Transactions on Industrial Electronics, 2022, doi: 10.1109/TIE.2022.3176269.
[13] Wang Bo, Huo Zhixin, Yu Yong, el al. Stability and dynamic performance improvement of speed adaptive full-order observer for sensorless induction motor ultralow speed operation[J]. IEEE Transactions on Power Electronics, 2020, 35(11): 12522-12532.
[14] 吕英俊, 刘卓伟, 苏涛, 等. 异步电机无传感器矢量控制极低速与零速性能研究[J]. 中国电机工程学报, 2019, 39(20): 6095-6103, 6190.
Lü Yingjun, Liu Zhuowei, Su Tao, et al. Research of sensorless vector control performance for induction motor at very low-speed and zero-speed[J]. Proceedings of the CSEE, 2019, 39(20): 6095-6103, 6190.
[15] Chen Jiahao, Huang Jin. Globally stable speed-adaptive observer with auxiliary states for sensorless induction motor drives[J]. IEEE Transactions on Power Electronics, 2019, 34(1): 33-39.
[16] Vaclavek P, Blaha P, Herman I. AC drive observability analysis[J]. IEEE Transactions on Industrial Electronics, 2013, 60(8): 3047-3059.
[17] Consoli A, Scarcella G, Testa A. Speed- and current-sensorless field-oriented induction motor drive operating at low stator frequencies[J]. IEEE Transactions on Industry Applications, 2004, 40(1): 186-193.
[18] Sun Wei, Liu Xiaofeng, Gao Jie, et al. Zero stator current frequency operation of speed-sensorless induction motor drives using stator input voltage error for speed estimation[J]. IEEE Transactions on Industrial Electronics, 2016, 63(3): 1490-1498.
[19] 王震宇, 孙伟, 蒋栋. 基于虚拟电压注入的闭环磁链观测器的感应电机无速度传感器矢量控制系统[J]. 电工技术学报, 2022, 37(2): 332-343.
Wang Zhenyu, Sun Wei, Jiang Dong. Induction motor speed sensorless vector control system based on closed-loop flux observer with virtual voltage injection[J]. Transactions of China Electrotechnical Society, 2022, 37(2): 332-343.
[20] Wang Zhenyu, Sun Wei, Jiang Dong. Stability analysis and trajectory design of a nonlinear switching system for speed sensorless induction motor drive[J]. IEEE Transactions on Industrial Electronics, 2022, 69(6): 5514-5524.
[21] Yamaguchi N, Hasegawa M, Doki S, et al. New approach for stability improvement of speed-sensorless induction-motor controls at zero frequency using multirate adaptive observer[J]. IEE Proceedings-Electric Power Applications, 2006, 153(4): 544.
[22] Lefebvre G, Gauthier J Y, Hijazi A, et al. Observability-index-based control strategy for induction machine sensorless drive at low speed[J]. IEEE Transactions on Industrial Electronics, 2017, 64(3): 1929-1938.
[23] Chen Jiahao, Mei Jie, Yuan Xin, et al. Natural speed observer for nonsalient AC motors[J]. IEEE Transactions on Power Electronics, 2022, 37(1): 14-20.
[24] Luo Cheng, Wang Bo, Yu Yong, et al. Enhanced low-frequency ride-through for speed-sensorless induction motor drives with adaptive observable margin[J]. IEEE Transactions on Industrial Electronics, 2021, 68(12): 11918-11930.
[25] 陈玥轩, 葛兴来, 左运, 等. 一种感应电机无速度传感器系统的电流传感器容错控制策略[J]. 中国电机工程学报, 2022, 42(6): 2346-2356.
Chen Yuexuan, Ge Xinglai, Zuo Yun, et al. A current sensor fault-tolerant control strategy for speed-sensorless induction motor system[J]. Proceedings of the CSEE, 2022, 42(6): 2346-2356.
[26] Yin Shaobo, Huang Yingwei, Xue Yaru, et al. Improved full-order adaptive observer for sensorless induction motor control in railway traction systems under low-switching frequency[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2019, 7(4): 2333-2345.
Current Optimization-Based Zero Frequency Ride-Through Method for Speed-Sensorless Induction Motor Drives
Abstract When speed-sensorless induction motor (IM) drives are operated in low frequency region, the speed observability will be poor. Particularly, the rotor speed cannot be observed at zero stator frequency. Addressing this problem, a current optimization zero frequency ride-through (CO-ZFRT) method is proposed for speed-sensorless IM drives (SSIMD) in this paper. Firstly, the transfer function of the estimated speed to the estimated speed error is derived, indicating the root cause of the speed unobservability at zero stator frequency. Secondly, the implementation of CO-ZFRT is derived by adaptively modifying the magnetizing current to ensure the observability of speed at low stator frequency, following with the analysis on operating point changes. In addition, a current optimization method is proposed for boundary points selection of active zero frequency crossing to obtain the optimal current performance. Combining the constraints of torque, current and observability, the speed observability and the minimum stator current are taken as the additional optimization objectives to derive the active zero-frequency crossing boundary points. Finally, the effectiveness of proposed method is verified on a 2.2kW IM experimental setup.
keywords:Induction motor, speed-sensorless control, zero frequency ride-through, current optimization
DOI:10.19595/j.cnki.1000-6753.tces.220860
中图分类号:TM346
国家自然科学基金(52237002,52207055)和国家电网总部科技项目(5100202222010A11ZN)资助项目。
收稿日期 2022-05-17
改稿日期 2022-06-14
罗 成 男,1991年生,博士,助理研究员,研究方向交流电机控制技术。E-mail:luoxcheng@126.com
杨 凯 男,1976年生,教授,博士生导师,研究方向交流电机设计及其智能控制技术。E-mail:yk@hust.edu.cn(通信作者)
(编辑 李冰)