
图1 集成充电器的概念图
Fig.1 Principle of integrated charger
摘要 在电动汽车应用中,车载储能电池的充电一般通过充电桩或者车载充电机实现。利用电动汽车的驱动电机及逆变器与电网连接,实现从电网交流电到直流电的电能变换,最终完成对车载储能电池进行充电,可以有效节省硬件和装置建设成本,还能有效提升车载充电容量。但相关策略在实现时,存在的最大挑战是如何抑制由绕组交流电流引起的电机转矩和振动。该文着眼于并网过程中电机的转矩问题,对实现驱动电机逆变器与电网之间可靠电能变换的方法进行了介绍。该文介绍的零转矩并网方法,其核心是结合电机绕组的型式和逆变器的电流控制来调整定子磁动势,从而合理布控电枢反应磁场与永磁磁场的空间关系使其满足零转矩条件。相关工作旨在为电动汽车传导式车载充电提供一种可行的硬件复用方案。
关键词:电动汽车 驱动电机及逆变器 车载集成式充电 零转矩
新能源汽车结合了能源技术、电气技术和信息技术,具有低碳排放、高效和智能的特点,未来将逐步取代燃油车。同时,新能源汽车的车载储能电池作为广域移动储能装备,还可支撑电网运行和协助消纳可再生能源,而这也可能成为一种能源套利方式,对于用户而言极具吸引力。
车载储能电池与电网间的电能变换,一般采用非车载的充电桩和车载充电机(On-Board Charger, OBC)。这两种技术各有优劣,直流充电桩充电速度快但依赖特定场地且成本较高;OBC在使用上十分便捷但容量受限。因而,车载充电机一般作为充电桩的补充,比如应急充电或居家充电。
受限于车内有限的空间,目前市面上的OBC功率等级通常不超过11kW,而这尚未达到用户需求。为提升OBC的充电容量,有两种可行思路:①提高OBC自身的功率密度,如采用宽禁带功率器件,通过提升开关频率,从而减小无源元件的体积;②利用系统集成的方法,如将OBC和车载DC-DC变换器等装置多合一组装,缩短装置间的电气连接线,共用散热器和支撑件,从而减小系统的体积。
系统集成的方法目前已被大多数整车企业所采纳,集成度基本已达上限;而基于宽禁带功率器件的OBC方案由于成本的原因尚未成熟。在该背景下,20世纪90年代就被提出的驱动-充电复用(integrated motor drive and charger)的概念成为可进一步减小OBC体积以及提升充电容量的“新”思路。集成充电器的概念如图1所示,即利用复用驱动电机及其逆变器构建OBC的前端脉冲宽度调制(Pulse Width Modulation, PWM)整流器,逆变器作为双向变流器,而驱动电机绕组将作为交流侧滤波电感。由于前端整流环节已由驱动电机系统构成,故OBC只需一套独立的隔离DC-DC变换环节即可,在相同的成本和可用空间下,隔离DC-DC变换器的功率等级可成倍地增加。同时,还可结合宽禁带功率器件和系统集成的方法,为大容量OBC的实现提供可能。
图1 集成充电器的概念图
Fig.1 Principle of integrated charger
在驱动-充电复用技术中,电机作为充(放)电回路的一部分,绕组中的交变电流产生旋转磁场将在充电过程中产生转矩和振动,带来车体不希望看到的运动,这是复用充电功能最大的困难之一。具备实用化的驱动-充电复用技术的一个主要挑战就是如何实现充(放)电过程中电机的零转矩[1]。
驱动-充电复用概念在1990年被W. E. Ripple较早提出[2],利用额外增加的二极管全桥和平波电感,并复用逆变器的一个桥臂来共同构建功率因数校正(Power Factor Correction, PFC)整流器;该方案中滤波电感没有复用电机绕组电感而是需要额外的电抗。W. E. Ripple在1992年提出利用两台三相驱动电机系统来构建单相整流器[3],两台星形联结电机的中性点引出并分别接到电网一端,然后控制电机相电流相等以防止电机产生转矩。1994年,A. G. Cocconi提出了基于三相电机驱动系统的单相集成充电器和基于多相电机驱动系统的三相集成充电器[4],但并未介绍零转矩运行。2012年,雷诺公司提出了基于电流源变换器、驱动电机及逆变器的三相集成充电方案[5],电机在并网时流过零序电流从而抑制了转矩,但外加的电流源变换器成本较高、体积较大,可靠性也会受到影响。比亚迪公司在2015年也提出了一种集成方案[6],利用逆变器与外加LC滤波器与电网连接,电机不参与并网,但额外的滤波器的体积依然较庞大。
学术界对驱动-充电复用技术也进行了一些探索[7-19],主要集中在利用多相电机及其驱动逆变器来实现单相或三相集成充电[7-10],借助多相电机电流控制自由度高的特点,灵活分配定子绕组电流以实现零转矩并网,但多相电机驱动系统目前在电动汽车中尚未广泛使用。S. Haghbin等在集成充电方面做了很多有意义的工作[11-13],在文献[13]中提出利用三相逆变器及可切换绕组结构的电机来构建整流器的方法,但绕组等效电感为漏感的一半,电能质量不高。文献[14]对开绕组电机及其驱动逆变器与单相电网的连接方式和零转矩并网方法作了讨论,但只考虑了理想的空间磁动势分布。针对以上方案的对比见表1与表2。
表1 单相充电复用不同方案特点比较
Tab.1 Comparison of single-phase charging
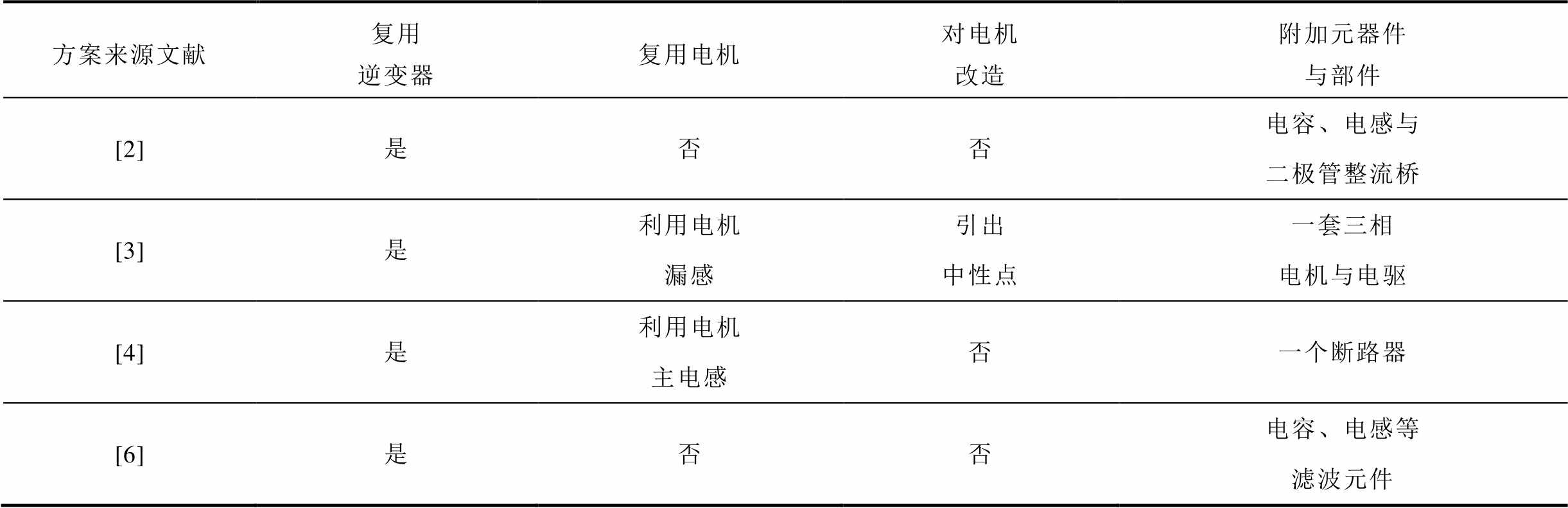
方案来源文献复用逆变器复用电机对电机改造附加元器件与部件 [2]是否否电容、电感与二极管整流桥 [3]是利用电机漏感引出中性点一套三相电机与电驱 [4]是利用电机主电感否一个断路器 [6]是否否电容、电感等滤波元件
(续)

方案来源文献复用逆变器复用电机对电机改造附加元器件与部件 [8]是利用电机主电感多相电机设计多个驱动桥臂 [14]是利用电机主电感多相电机设计绕组切换装置
表2 三相充电复用不同方案特点比较
Tab.2 Comparison of three-phase charging
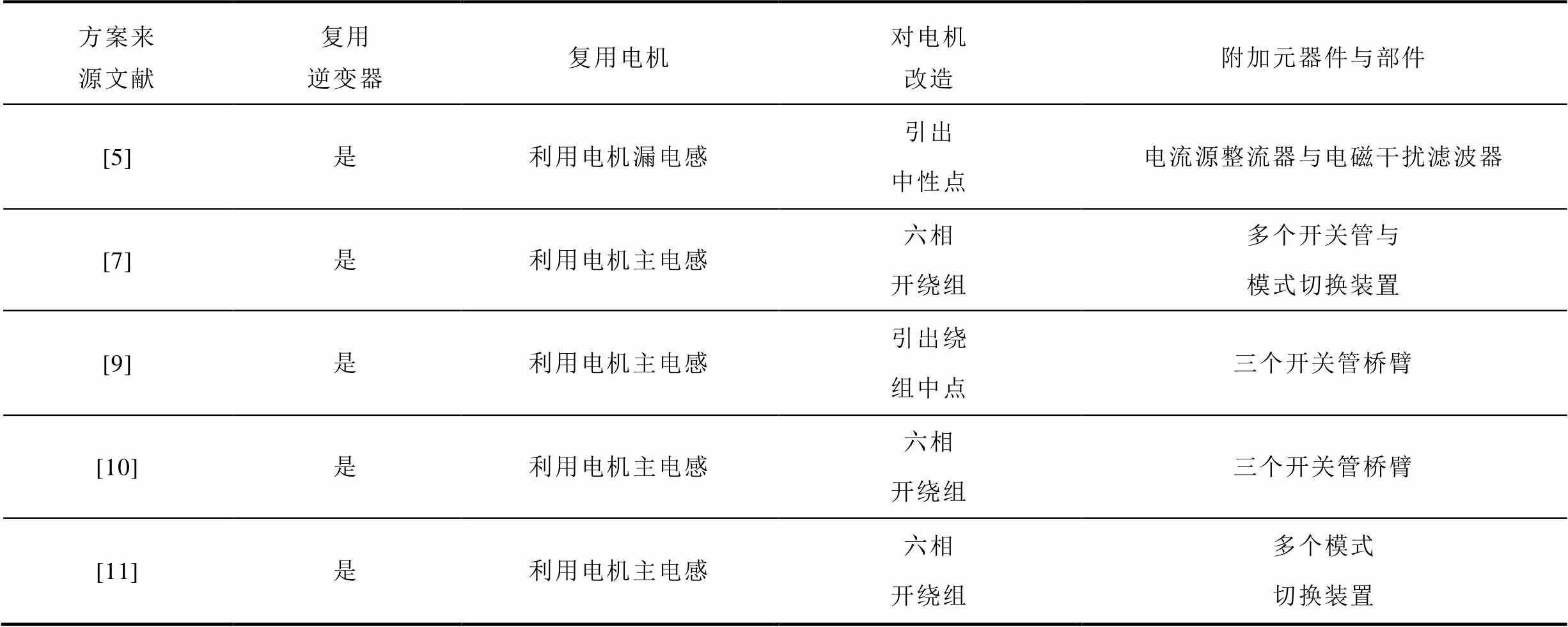
方案来源文献复用逆变器复用电机对电机改造附加元器件与部件 [5]是利用电机漏电感引出中性点电流源整流器与电磁干扰滤波器 [7]是利用电机主电感六相开绕组多个开关管与模式切换装置 [9]是利用电机主电感引出绕组中点三个开关管桥臂 [10]是利用电机主电感六相开绕组三个开关管桥臂 [11]是利用电机主电感六相开绕组多个模式切换装置
在前述工作的基础上[15-17],本文探索具有实用价值的单相和三相并网的驱动-充电复用技术,重点分析和设计具有零转矩并网运行特性的方案。相比现有方法,本文提出的方案具有以下特点:①根据转子d轴位置合理选择电流分配方式,保证单相并网的驱动-充电复用电路可靠零转矩并网运行;②利用三相逆变器与新型变绕组结构永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)构建三相并网集成充电器,易实施于现有电驱系统中,在零转矩并网运行的同时,电路的等效电感为电机主电感,从而提升并网电能质量。
本文首先介绍单相并网的驱动-充电复用技术,包括电路结构及其零转矩并网运行原理、并网电流控制策略以及方案验证;其次介绍三相并网的驱动-充电复用技术,包括基于双模块电机的复用结构、并网电流控制策略以及方案验证;然后对电动汽车驱动-复用技术作扩展讨论与展望;最后对本文工作进行总结。
本节介绍适用于单相并网的驱动-充电复用技术,应用场景如住宅和办公区的慢充。单相并网的驱动-充电技术的一种结构如图2所示,将单相电网接入电机某一相绕组与桥臂之间,即可利用变流器完成电网与直流侧之间的电能双向流动,且电机绕组充当交流滤波电感。该结构于1994年被A. G. Cocconi提出[4],结构简单、易实现,但关键的零转矩并网运行方法一直未作讨论。本节分析该结构并网时零转矩的电流约束及控制方法,并用仿真和实验证明方法的有效性。

图2 单相并网的驱动-充电技术:结构1
Fig.2 Single-phase integrated motor drive and charger: structure 1
假设电机A相绕组接入单相电网,则A相电流iA等于电网电流ig(以流入电网为正)。根据基尔霍夫电流定律易知,B相电流和C相电流之和等于-iA,两者之间的分配关系是可控量。在文献[4]中,指定了B相或C相中某一相电流为零,另一相电流等于-iA,但这并未考虑电机的转矩,因此极易产生振动。
永磁电机转矩的简化公式为
 (1)
(1)
式中, 为电机永磁磁链;np为电机极对数;Ld和Lq分别为电机d轴和q轴电感;id和iq分别为d轴和q轴电流分量。可知,满足以下条件之一即可实现零转矩:①iq=0;②id=ψf/(Lq-Ld)。显然条件①更易实现,且与电机参数无关。
为电机永磁磁链;np为电机极对数;Ld和Lq分别为电机d轴和q轴电感;id和iq分别为d轴和q轴电流分量。可知,满足以下条件之一即可实现零转矩:①iq=0;②id=ψf/(Lq-Ld)。显然条件①更易实现,且与电机参数无关。
由条件①,并借助2s/3s变换(2s代表转子dq轴坐标系,并网时为静止坐标系;3s代表ABC三相静止坐标系),可建立三相电流数学约束关系,即
 (2)
(2)
式中,θr为电机d轴位置角,可通过检测绝对位置或在线辨识来获得;iA等于电网电流,为已知量。从式(2)可知,B相电流和C相电流之间的电流分配关系须结合θr确定,这是零转矩的一个充分条件,也是最易实现的充分条件。
图3所示的电流控制策略是满足上述充分条件的措施。首先由电网电流指令,根据i*A=i*g、i*B+i*C=-i*A、式(2)的分配关系以及3s/2r坐标变换(2r代表转子dq轴旋转坐标系)得到dq轴电流指令 和
和 ;然后利用比例-谐振(Proportion Resonant, PR)调节器使通过反馈电流
;然后利用比例-谐振(Proportion Resonant, PR)调节器使通过反馈电流 转化得到的实际dq轴电流跟踪指令,谐振调节器的谐振频率为电网频率;调节量加上通过电网电压
转化得到的实际dq轴电流跟踪指令,谐振调节器的谐振频率为电网频率;调节量加上通过电网电压 转化得到的电网电压前馈量
转化得到的电网电压前馈量 和
和 得到变流器电压输出量;最后由空间矢量调制(Space Vector Modulation, SVM)模块,根据电压输出量得到桥臂驱动信号,完成电流的分配和控制。
得到变流器电压输出量;最后由空间矢量调制(Space Vector Modulation, SVM)模块,根据电压输出量得到桥臂驱动信号,完成电流的分配和控制。
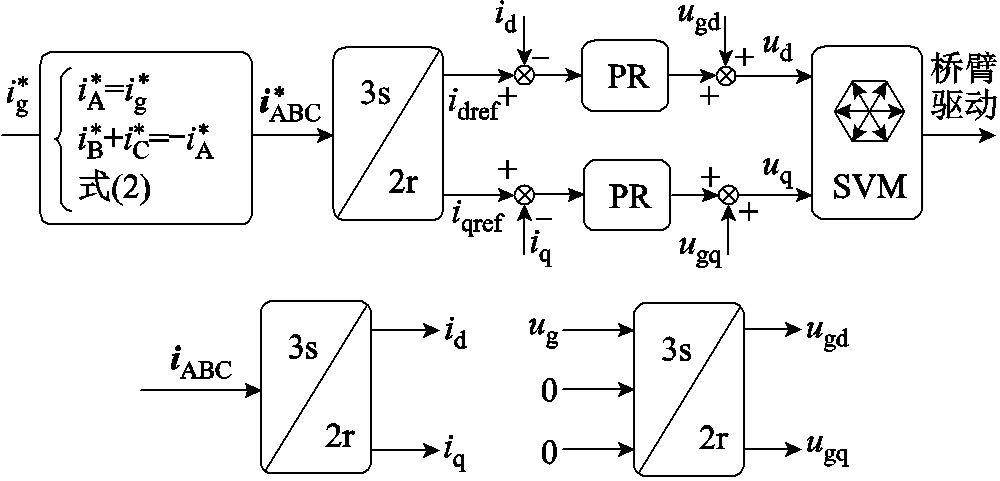
图3 单相并网的驱动-充电复用结构1的电流控制策略
Fig.3 Control of the single-phase integrated motor drive and charger (structure 1)
利用Ansys Maxwell软件,建立一台内置式永磁电机的有限元仿真模型,对上述驱动-充电复用结构的零转矩并网运行进行验证(A相绕组接入电网),电机有限元模型的参数见表3。
表3 电机有限元模型参数
Tab.3 The parameters of the simulation
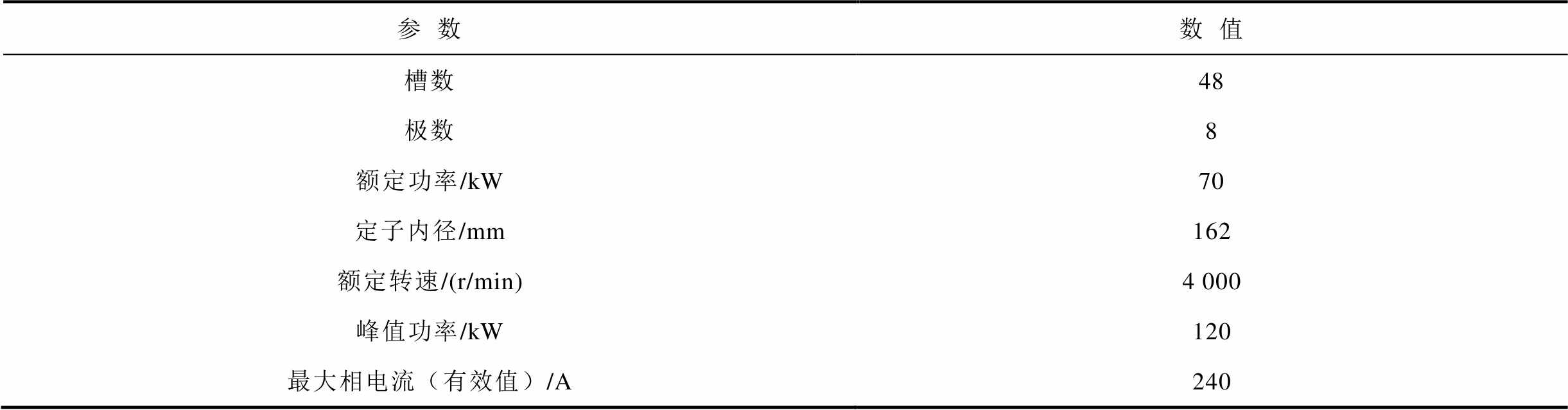
参数数值 槽数48 极数8 额定功率/kW70 定子内径/mm162 额定转速/(r/min)4 000 峰值功率/kW120 最大相电流(有效值)/A240
对有限元模型的绕组施加如下电流激励:始终保持A相电流是有效值为102A、频率50Hz的正弦电流(对应充电功率22kW),而B相和C相电流则利用所提出的分配关系计算得到。图4给出了转子位置角分别为0、π/6和π/3时,电机上产生的转矩。根据分配关系,当θr=0时,iB=iC=-0.5iA;当θr=π/6时,iB=0,iC=-iA;当θr=π/3时,iB=iA,iC=-2iA。
由图4可知,不同的转子位置角下通过采用所提出的电流分配方法,电机产生的转矩不超过0.2N·m。与电机的额定转矩相比,功率为22kW的单相并网充电过程所引起的电机转矩很小,难以克服电机转轴自身的静摩擦力矩和惯性,几乎不会产生振动和噪声;适当的降额运行可保证电机无振动和噪声。
为进一步验证方法的效果,利用一套额定功率为5.5kW的永磁同步电机、驱动逆变器及220V/50Hz单相电网模拟器的实验平台进行了实验验证。表4为实验平台的一些关键参数。
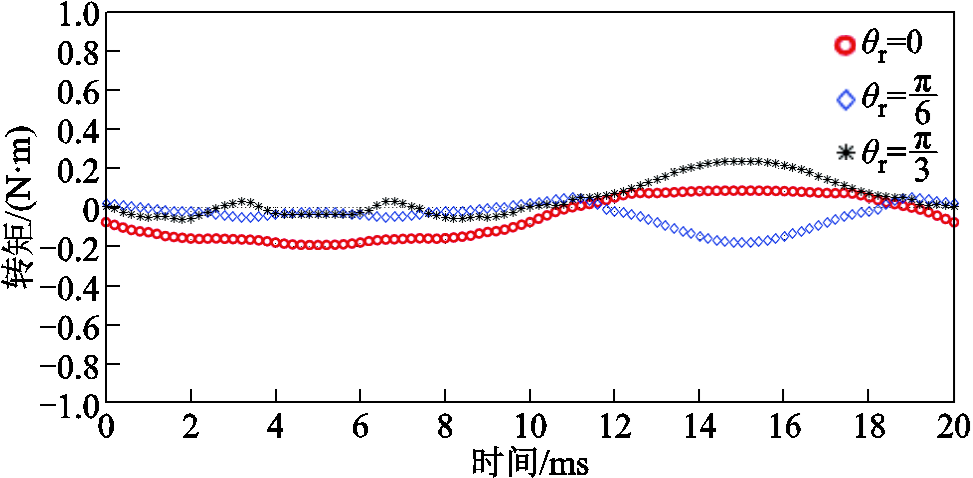
图4 不同转子位置角下电机的转矩
Fig.4 The torque under the different conditions with different rotor angles
表4 实验平台电气参数
Tab.4 The parameters of the experimental platform
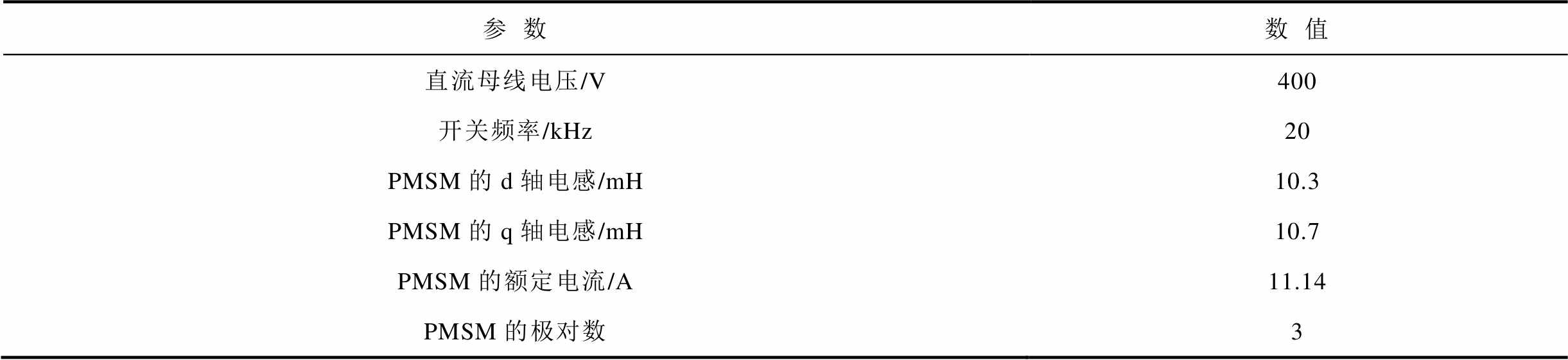
参数数值 直流母线电压/V400 开关频率/kHz20 PMSM的d轴电感/mH10.3 PMSM的q轴电感/mH10.7 PMSM的额定电流/A11.14 PMSM的极对数3
图5给出了并网稳态和暂态过程的电机相电流和转矩波形[15],电机d轴位于0rad的位置,此时应满足iB=iC=-0.5iA;稳态时的并网电流幅值为16A。所施加的电流与电机额定电流相当,但转矩最大值不超过0.2N·m,电机保持静止且无噪声。图5b中还给出了并网电流的低频频谱,低次谐波的幅值均低于0.2A(并网电流的1.25%),满足并网标准要求;图5c和图5d包含两次功率指令瞬变的过程,在暂态过程中,电机转矩依然保持很小的值,且电流响应速度快。

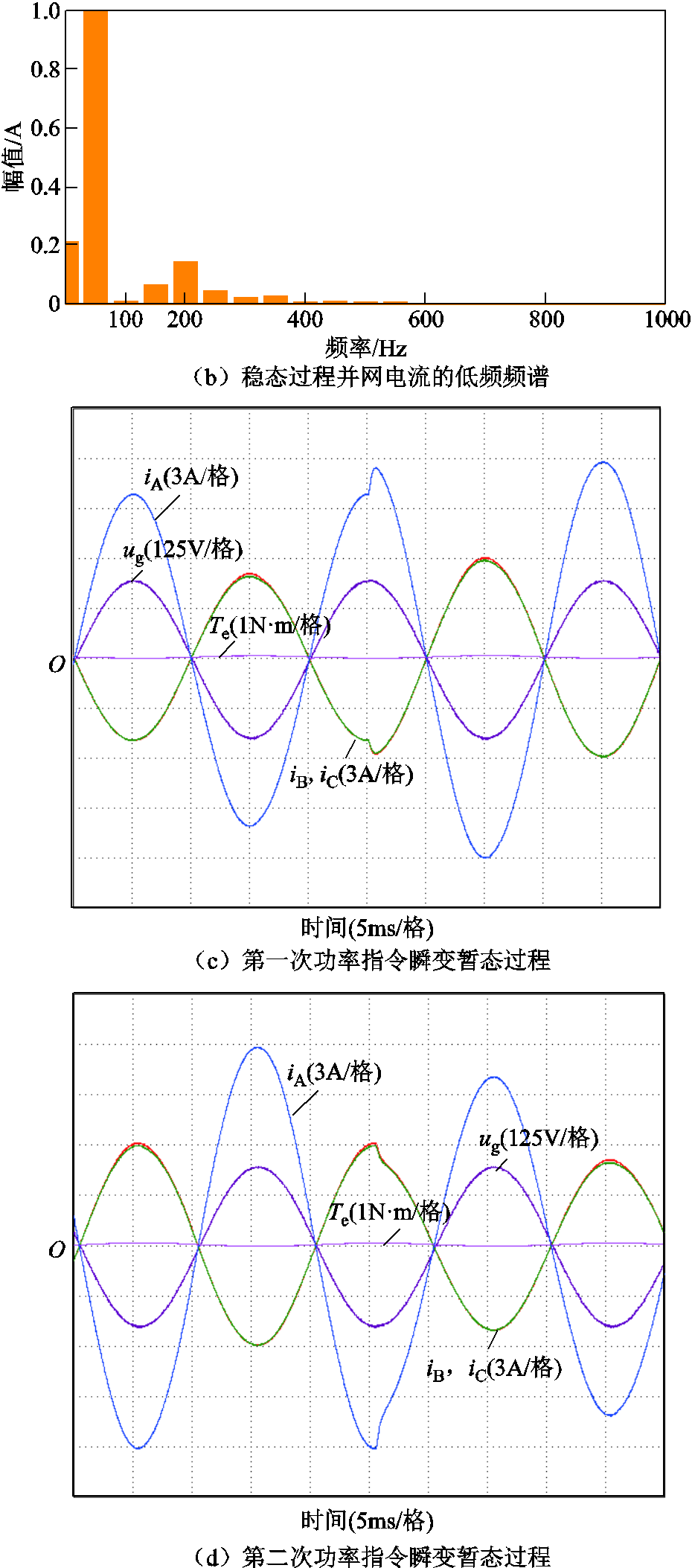
图5 驱动-充电复用结构1在单相并网工况下的电流与转矩波形[15]
Fig.5 The current and the torque of integrated motor drive and charger system[15]
仿真和实验共同验证了所提出的零转矩并网运行方法的有效性。单相并网的驱动-充电复用电路是常用的三相逆变器+永磁电机的架构,结构简单、硬件改造容易,具有很强的实用性;结合所提出的零转矩并网运行方法,可实现静止无噪声的单相并网充电。
在三相供电的场景,若车载充电机具备三相并网的能力,相同的电流应力下,充电功率将是单相并网充电的三倍,且无二次功率谐波。目前,学术界关注较多的三相并网的驱动-充电复用方案是S. Q. Ali提出的基于六相电机驱动系统的复用结构[10],该结构充电容量大且实现了零转矩;但同时也存在变流器环流、并网电流负序分量以及部分相电流纹波较大等问题。环流增加了变流器损耗,负序分量导致充电功率波动,电流纹波过大则无法满足并网标准。另一方面,目前还没有电动汽车厂商采用六相电机驱动系统,因此目前来说该方法的可实施性不强。
本文探究一种基于三相电机驱动系统的三相并网集成充电器,在实现零转矩并网的同时,避免了六相驱动-充电复用方法中存在的环流问题;进一步地,还提出了一种优化并网电流控制策略,可有效抑制并网电流中的负序分量;绕组等效电感与主电感相当,电流纹波小。为了实现零转矩并网,电机结构上要做一定的改变,即采用两套三相绕组,通过转矩对消的方法,实现加载在转子上的转矩为零。三相并网的驱动-充电复用电路如图6与图7所示[15],其中A1/B1/C1和A2/B2/C2为两套三相绕组。通过改变驱动与充电时的绕组连接顺序,实现零转矩并网运行,具体原理将结合绕组构成进行解释。
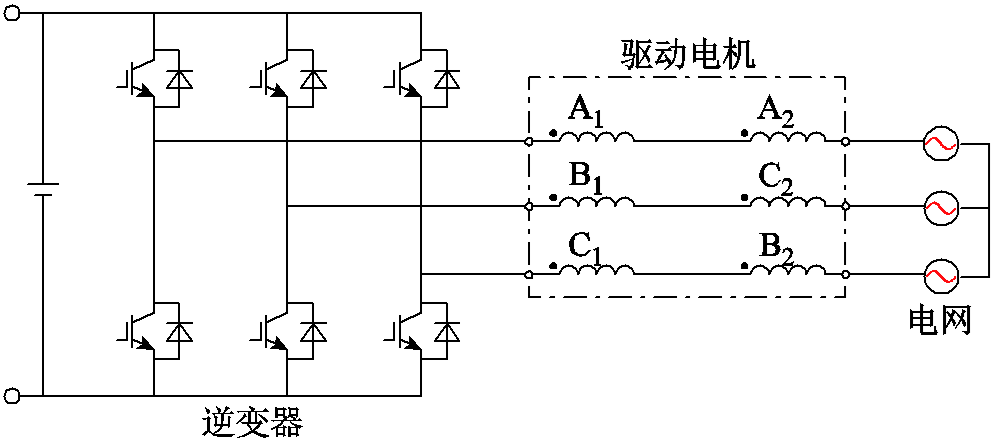
图6 三相并网的驱动-充电技术:结构1
Fig.6 Three-phase integrated motor drive and charger: structure 1

图7 三相并网的驱动-充电技术:结构2
Fig.7 Three-phase integrated motor drive and charger: structure 2
该方案采用的电机为双模块三相电机,其定子绕组分为对称的两部分:A1、B1、C1以及A2、B2、C2,以4极12槽的电机为例,双模块电机结构及绕组相位关系如图8所示。
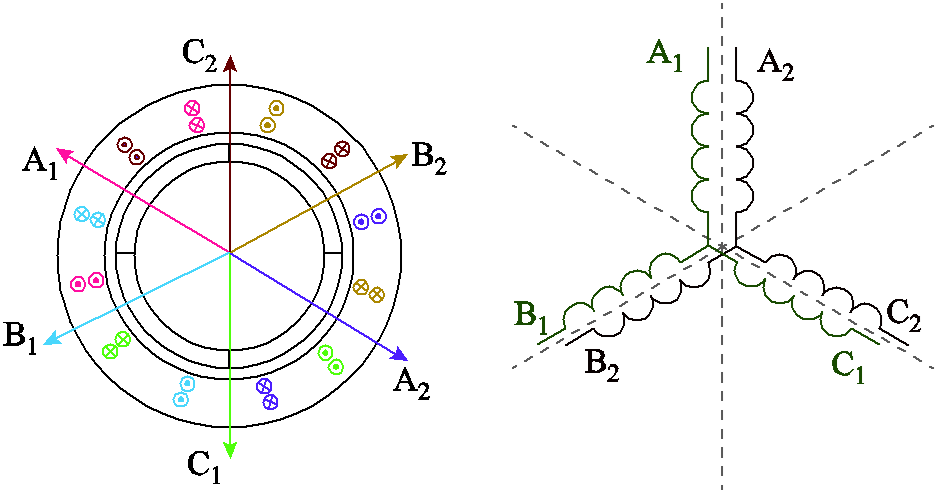
图8 双模块电机结构及绕组其相位关系示意图
Fig.8 Structure and phase position of stator windings of duel-segment PMSM
通过虚位移法,电机转矩表达式可表示为
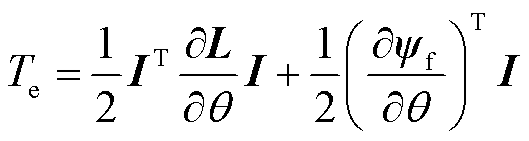 (3)
(3)
式中,I为定子电流矢量;L为电机电感矩阵;ψf为永磁磁链。
将两套绕组的电流矢量以及自感与互感代入式(3)可以得到
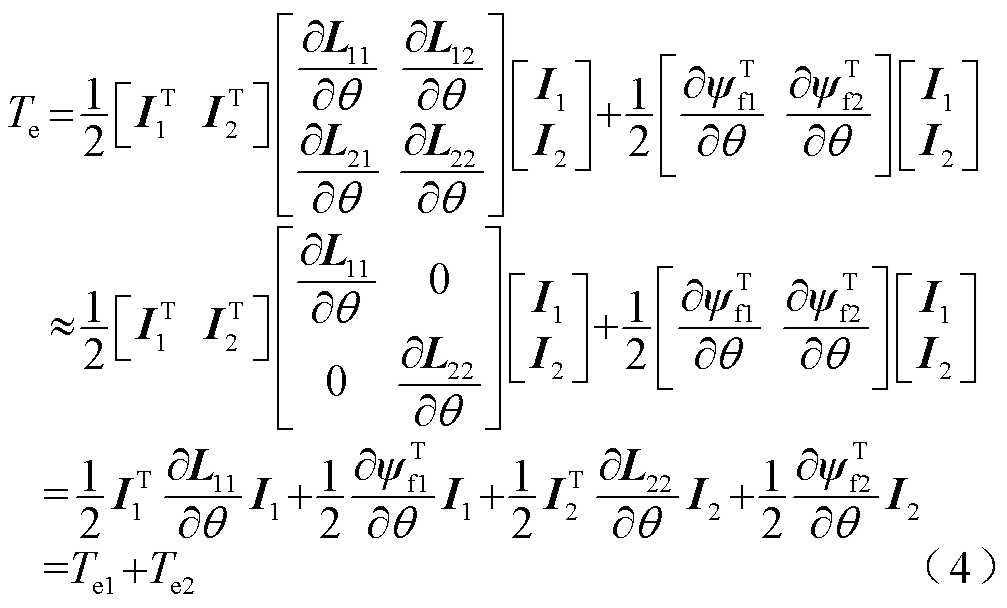
式中,I1与I2分别为两套绕组的电流矢量;L11与L22分别为两套绕组的自感;L12与L21分别为两套绕组间的互感;ψf1与ψf2分别为与两套绕组交链的永磁磁链。通过有限元仿真分析发现,双模块电机的两套绕组耦合度很小,因此两套绕组间的互感可以忽略,电机转矩可以视为两模块产生的转矩之和;且在进行三相充电时,电机等效电感为主电感,主电感数值远大于漏电感,滤波效果较好。
根据以上结论对三相充电过程中图6所示结构1的转矩情况进行分析。三相电网电压固定,充电电流与电网电压保持同相位,因此绕组A1、B1、C1激励产生一个以工频电角速度旋转的磁动势,同时,绕组A2、C2、B2也激励产生一个幅值和速度相同,但与前者激励产生的磁动势旋转方向相反的磁动势。保持电机d轴与A相绕组相位一致,结构1与结构2充电时各矢量示意图如图9所示,其中I1与I2分别为电机两组模块的电流矢量。
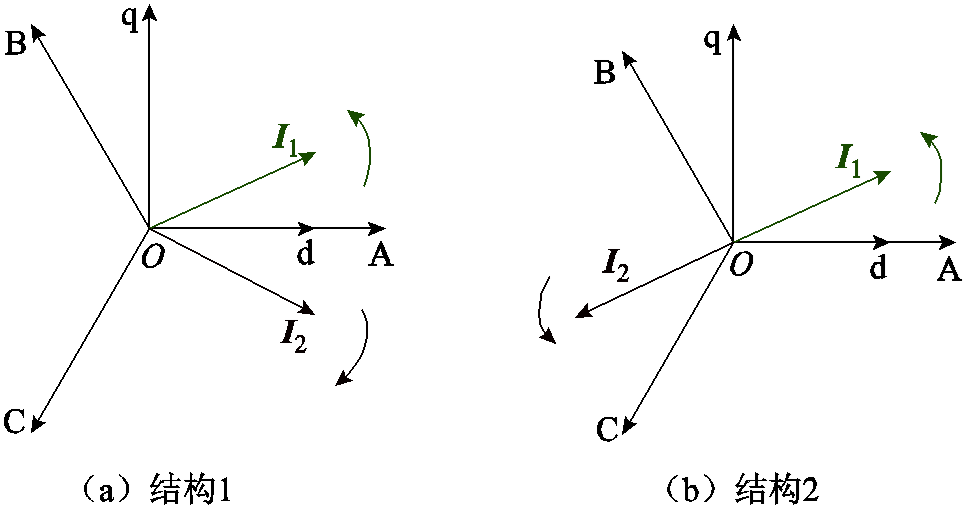
图9 充电时矢量关系
Fig.9 Phase position of stator windings while charging
根据永磁同步电机转矩表达式(1),电机的转矩分为两部分:永磁转矩以及磁阻转矩。在结构1方案中,由图9a可看出,两个电流矢量幅值相等,旋转方向相反,电流矢量的q轴分量保持大小相同,方向相反,而d轴分量则始终保持相同,因此可以保证电机两个模块的永磁转矩与磁阻转矩均互相抵消,该方案在凸极式与隐极式电机均适用。针对该方案,提出了相应的工作模式切换装置,如图10所示。K1为驱动时闭合而充电时关断的四个继电器;K2为驱动时关断而充电时闭合的两个继电器。当工作在电机驱动模式时,K1继电器闭合,K2继电器断开,电路为星形联结的三相永磁同步电机;当工作于并网模式时,K1继电器断开,K2继电器闭合,三相电网接入电路,可以实现对车载电池快速充电。对于结构2,同理可设计相应的绕组连接切换装置。
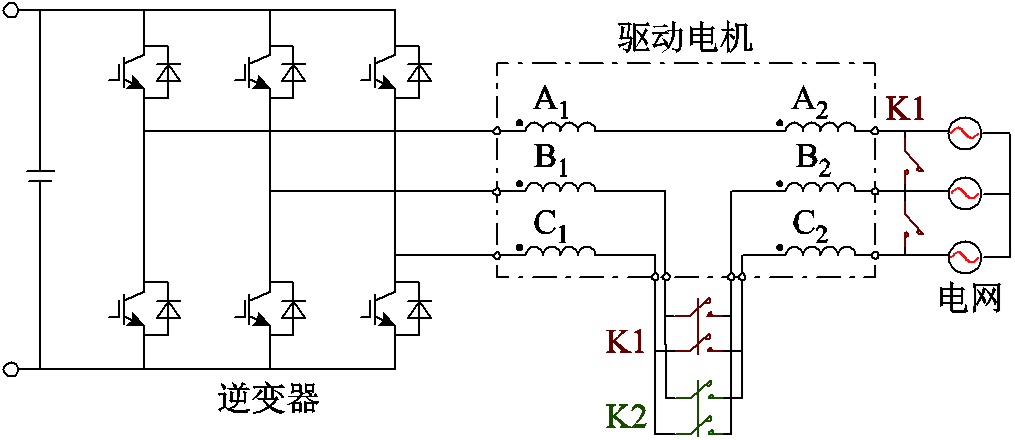
图10 结构1对应的模式切换装置
Fig.10 Mode switching device corresponding to structure 1
在结构2充电时的绕组联结方式中,电机模块1与模块2的每一相电流方向均相反,因此两个模块的电流矢量旋转方向相同,且d轴与q轴分量的大小均相同,方向均相反,如图9b所示。根据转矩表达式(1),该方案可以保证充电时电机的永磁转矩为0,但是对于凸极式永磁同步电机,由于d轴和q轴磁阻不一致,Ld≠Lq,因此在充电时电机会产生磁阻转矩,造成噪声或振动,所以结构2方案仅适用于隐极式同步电机。为了提高转矩密度,对于电动汽车驱动广泛应用的内嵌式永磁同步电机,天然需要具有磁阻转矩。因此结构1的方法是可行的方案,即需要采用图10的切换模式。
对于上述两种结构的三相并网电流控制策略均如图11所示。由于三相电网波形一定且要满足功率因数为1的要求,因此在三相充电方案中,只需要确定充电功率P,再通过锁相环,即可以确定三相并网电流 、
、 、
、 ;通过坐标变换以及电流环,再添加电网电压前馈量得到ugd和ugq;最后通过调制单元得到桥臂驱动信号,完成对三相并网电流的控制。
;通过坐标变换以及电流环,再添加电网电压前馈量得到ugd和ugq;最后通过调制单元得到桥臂驱动信号,完成对三相并网电流的控制。
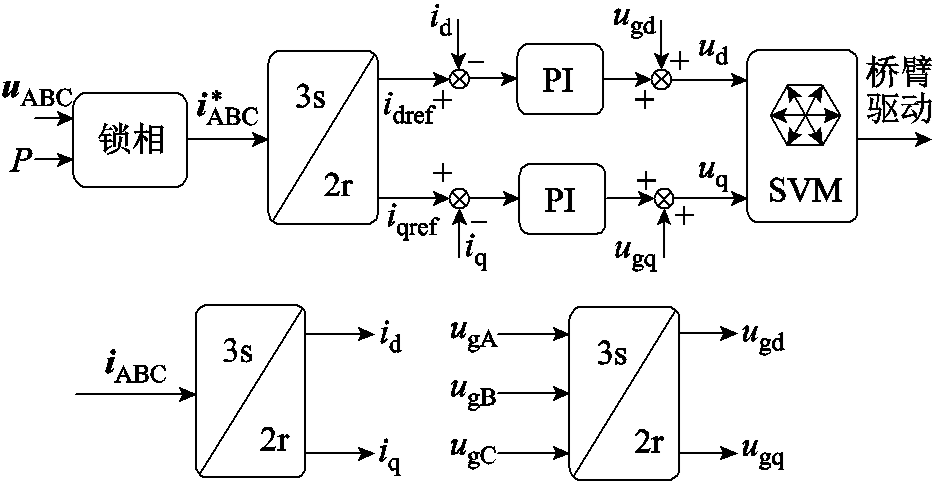
图11 三相并网的驱动-充电复用结构的电流控制策略
Fig.11 Control of the three-phase integrated motor drive and charger
利用表3所示的48槽8极双模块永磁同步电机,在有限元仿真软件中将电流分配方式改为双模块电机电流分配方式,对上述结构进行仿真并验证其零转矩效果。三相正弦电流有效值为50A,三相驱动-充电复用结构在并网工况下的仿真转矩波形如图12所示。可以看出,三相充电过程中,结构1的电机转矩可以几乎保持为零;而由于磁阻转矩的存在,结构2在并网过程中存在一定转矩,亦验证了前文的理论分析。
在此基础上,利用一台双模块的永磁同步电机进行实验研究。这台双模块永磁同步电机的两套三相绕组端子外接,可以通过图6的模式接为并网结构1,可以按照图7的模式接为并网结构2,也可以顺序连接为正常驱动模式(结构3)。三种模式都可以接入三相电网,实现开绕组并网模式[16]。实验中,三相交流电压源模拟三相电网,设置相电压有效值为110V,直流母线设置为600V,电流幅值给定为8A。为了准确地评估三种并网模式下的转矩振动情况,在转轴上加入了振动加速度传感器,测量转轴的振动加速度来表征真实并网过程中转矩振动的情况。
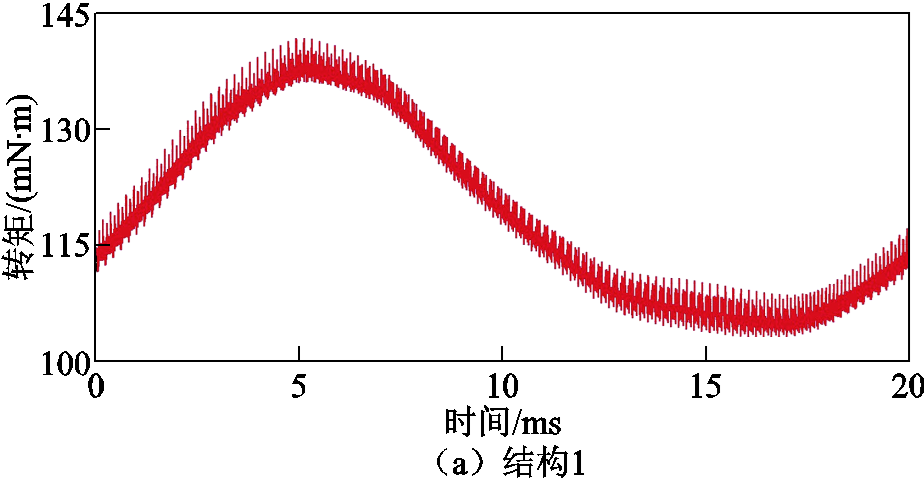
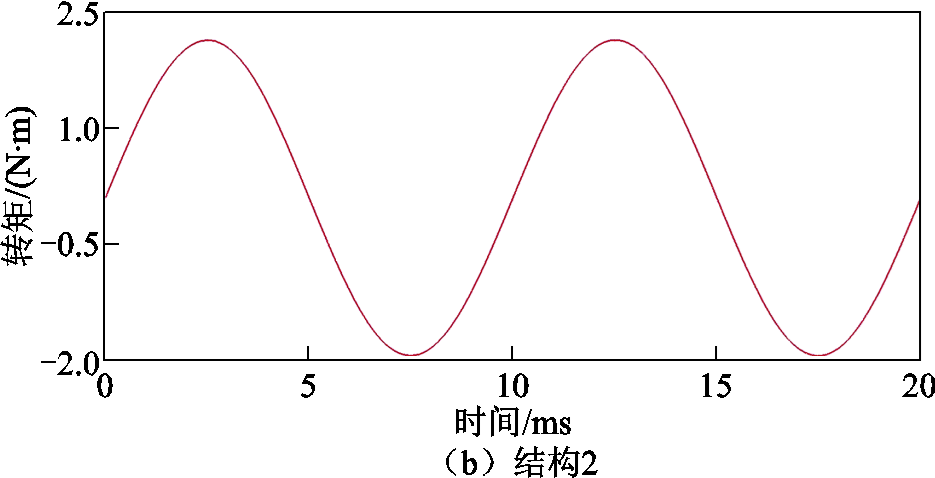
图12 三相驱动-充电复用结构在并网工况下的仿真转矩波形
Fig.12 Torque of simulation result of three phase integrated motor drive and charger system
三相驱动-充电复用结构在并网工况下的实验波形如图13所示。振动加速度传感器测量得到三种模式下的转轴振动加速度并做快速傅里叶变换(Fast Fourier Transform, FFT)分析,如图13a所示。采用驱动电机常规连接的方法下(结构3),旋转磁动势产生永磁和磁阻转矩,基波和二倍频振动均有明显的振动加速度(大于0.14m/s2),并引起刺耳的啸叫;采用图7所示的并网结构2,基波和二倍频率振动加速度下降到0.08m/s2,啸叫依然存在但有所减小;采用本文提出的反相序连接(结构1),基波和二倍频率的振动加速度低于0.02m/s2,电机噪声也明显减弱。说明采用所提出的反相序连接方法,转矩实现对消,低频振动噪声也能得到明显抑制。采用这一模式下的并网电压电流波形如图13b所示,能满足充电并网的需求。

图13 三相驱动-充电复用结构在并网工况下的实验波形[17]
Fig.13 The experimental waveforms of three phase integrated motor drive and charger system [17]
当电机加入充电回路,其主要的挑战就是如何在定子绕组中注入并网电流的同时还能实现电磁转矩为零。针对交流电机本身,在定子绕组注入电流的情况下有四种情况实现零转矩:①只有漏磁场;②直流电流带来的恒定磁场;③脉振磁场;④对消的旋转磁场。情况①的主要问题是并网电抗太小;情况②利用了电机的直流电抗,但是仍需要额外的(电流源型)逆变器才能实现与交流电网的互联。本文的两种驱动-充电复用结构中,单相的方法就是基于情况③的脉振磁场,而三相的方法则是基于情况④的对消旋转磁场。
本文介绍的两种驱动-充电复用结构中,单相充电的方法简单,对于原有系统改变较小,但是功率有限,适用于取代车载充电机的功能;三相充电需要对电机结构进行改变,但是充电功率大,甚至可以与驱动电机额定功率相比较,适用于取代充电桩的功能。两种方法应用中还有一些需要注意的地方。
对于单相系统,为了保证驱动-充电复用装置的效率,iB和iC最好都在[-iA, 0]范围内,否则iB或iC中的一相电流幅值将超过iA的幅值,例如iB=-1.5iA,iC=0.5iA,此时iB的幅值大于iA的幅值,这不是合理的分配。图14给出了相电流与转子位置角之间的量化关系,可知只有当θr∈[-π/6, π/6]∪[5π/6, 7π/6]时,B相和C相电流才处于合理的分配范围内。
因此对于单相集成充电器,在充电前,需要将电机d轴位置定位与A相坐标轴重合,由于电动汽车不存在离合器,因此这个步骤有可能需要车轮转动一个小角度,可以通过对充电驻车程序进行设计以满足转子位置要求;另一种思路为,通过测量驻车充电时转子位置角度,改变集成充电器中电网连接到的定子绕组,即当θr∈[-π/6, π/6]∪[5π/6, 7π/6]时,A相绕组连接电网,当θr∈[π/6, π/2]∪[7π/6, 3π/2]时,C相绕组连接电网,其余情况B相绕组连接电网。在这种情况下,通过控制不连接至电网的绕组电流比例以控制电流矢量的q轴分量始终为零,从而确保电动汽车充电时不产生转矩。

图14 电流与转子位置角之间的关系
Fig.14 The relationship of phase current and angle of rotor
对于上述三相系统,由于绕组联结方式已经确定,d轴位置必须与一相绕组对齐,所以充电前对转子进行定位也是必要的,且定位的精确性也是影响充电时电机是否会产生转矩的重要因素。
另外本文提出的三相驱动-充电复用技术,对于电机绕组模式切换的装置仍然比较复杂,继电器过电流能力与动作可靠性需要加以考虑,因此对驱动与充电模式的切换结构和动作过程需要进行研究。相较现有电机,要求对部分电机结构进行重新设计,对于其成本与收益,需要进一步分析评估。
电动汽车驱动-充电复用技术是一种有效利用电动汽车已有的电机-驱动系统实现充电功能的新技术。在这一技术中,如何保证充电过程电机转矩为零是其实用化的一个关键。本文对零转矩下的单相以及三相电动汽车驱动-充电复用技术进行了分析与讨论。
对于单相驱动-充电复用技术,其优点为成本低、体积小、重量轻,且对于驱动电机不需要进行任何重新设计,复用了电机以及电机驱动变流器实现单相并网充电功能。实际应用中,单相充电应用场景多为家庭或工作时间充电,充电时间较长,且受限于单相电网的功率限制,单相驱动-充电复用技术方案的充电功率提升空间也较为有限。因此该方案的主要目标在于取代车载充电器。
对于三相驱动-充电复用技术,可以突破单相电网的功率限制,实现大功率快速充电,同时可以提升充电灵活性,节省了地面快速充电桩的建设成本,且避免了不同电动汽车厂商充电标准的不一致,仅需将电动汽车连接至三相电网接口,方便快捷。该技术的主要目标是简化充电桩的建设,但该技术需要对电机进行改造才能有效地实现零转矩。
综合以上分析,结合单相和三相集成充电技术的特点,本文提出的驱动-充电复用技术在成本、重量、体积、充电功率以及灵活性上都具有一定优势,且二者器件与结构均具备支持能量双向流动运行的条件,在未来V2G(vehicle-to-grid)技术得到推广后也可以满足相关需求[20-22],具有较好的应用推广前景。
但是需要指出的是,未来广泛应用电动汽车驱动-充电复用技术,除了本文所提出的技术解决方案外,还需要考虑包括用户体验、产业链布局调整以及新行业标准制定等问题。
参考文献
[1] 佟明昊, 程明, 许芷源, 等. 电动汽车用车载集成式充电系统若干关键技术问题及解决方案[J]. 电工技术学报, 2021, 36(24): 5125-5142.
Tong Minghao, Cheng Ming, Xu Zhiyuan, et al. Key issues and solutions of integrated on-board chargers for electric vehicles[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5125-5142.
[2] Rippel W E. Integrated traction inverter and battery charger apparatus: USA: 4920475[P]. 1990-04-24.
[3] Rippel W E, Cocconi A G. Integrated motor drive and recharge system: USA: 5099186[P]. 1992-03-24.
[4] Cocconi A G. Combined motor drive and battery recharge system: USA: 5341075[P]. 1994-08-23.
[5] Loudot S, Briane B, Ploix O, et al. Fast charging device for an electric vehicle: USA: US20120286740[P]. 2012-11-15.
[6] 魏维, 王洪军, 周伟. 电动汽车及其集成控制系统: 中国: CN103182951B[P]. 2015-11-25.
[7] Diab M S, Elserougi A A, Abdel-Khalik A S, et al. A nine-switch-converter-based integrated motor drive and battery charger system for EVs using symmetrical six-phase machines[J]. IEEE Transactions on Industrial Electronics, 2016, 63(9): 5326-5335.
[8] Subotic I, Bodo N, Levi E. Single-phase on-board integrated battery chargers for EVs based on multiphase machines[J]. IEEE Transactions on Power Electronics, 2016, 31(9): 6511-6523.
[9] Lacroix S, Laboure E, Hilairet M. An integrated fast battery charger for electric vehicle[C]//2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 2010: 1-6.
[10] Ali S Q, Mascarella D, Joos G, et al. Torque cancelation of integrated battery charger based on six-phase permanent magnet synchronous motor drives for electric vehicles[J]. IEEE Transactions on Transportation Electrification, 2018, 4(2): 344-354.
[11] Haghbin S, Lundmark S, Alakula M, et al. Grid-connected integrated battery chargers in vehicle applications: review and new solution[J]. IEEE Transactions on Industrial Electronics, 2013, 60(2): 459-473.
[12] Haghbin S, Lundmark S, Alakula M, et al. An isolated high-power integrated charger in electrified-vehicle applications[J]. IEEE Transactions on Vehicular Technology, 2011, 60(9): 4115-4126.
[13] Haghbin S, Khan K, Zhao Shuang, et al. An integrated 20-kW motor drive and isolated battery charger for plug-in vehicles[J]. IEEE Transactions on Power Electronics, 2013, 28(8): 4013-4029.
[14] Tong Minghao, Cheng Ming, Hua Wei, et al. A single-phase on-board two-stage integrated battery charger for EVs based on a five-phase hybrid-excitation flux-switching machine[J]. IEEE Transactions on Vehicular Technology, 2020, 69(4): 3793-3804.
[15] Gao Jialou, Sun Wei, Jiang Dong, et al. Improved operation and control of single-phase integrated on-board charger system[J]. IEEE Transactions on Power Electronics, 2021, 36(4): 4752-4765.
[16] Gao Jialou, Jiang Dong, Sun Wei, et al. Zero torque three phase integrated on-board charger by multi-elements motor torque cancellation[C]//2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 2019: 563-568.
[17] 高加楼. 电动汽车驱动电机系统的充电复用技术研究[D]. 武汉: 华中科技大学,2021.
[18] 李春杰, 黄文新, 卜飞飞, 等. 电动汽车充电与驱动集成化拓扑[J]. 电工技术学报, 2017, 32(12): 138-145.
Li Chunjie, Huang Wenxin, Bu Feifei, et al. The integrated topology of charging and drive for electric vehicles[J]. Transactions of China Electrotechnical Society, 2017, 32(12): 138-145.
[19] 张飞龙, 王晓琳, 顾聪, 等. 基于电机定子绕组开路的电机驱动和充放电集成系统研究[J]. 电工技术学报, 2019, 34(18): 3778-3787.
Zhang Feilong, Wang Xiaolin, Gu Cong, et al. Research on integrated system of motor drive and charging/discharging based on open motor stator winding[J]. Transactions of China Electrotechnical Society, 2019, 34(18): 3778-3787.
[20] 孙惠, 翟海保, 吴鑫. 源网荷储多元协调控制系统的研究及应用[J]. 电工技术学报, 2021, 36(15): 3264-3271.
Sun Hui, Zhai Haibao, Wu Xin. Research and application of multi-energy coordinated control of generation, network, load and storage[J]. Transactions of China Electrotechnical Society, 2021, 36(15): 3264-3271.
[21] 许刚, 张丙旭, 张广超. 电动汽车集群并网的分布式鲁棒优化调度模型[J]. 电工技术学报, 2021, 36(3): 565-578.
Xu Gang, Zhang Bingxu, Zhang Guangchao. Distributed and robust optimal scheduling model for large-scale electric vehicles connected to grid[J]. Transactions of China Electrotechnical Society, 2021, 36(3): 565-578.
[22] 姚一鸣, 赵溶生, 李春燕, 等. 面向电力系统灵活性的电动汽车控制策略[J].电工技术学报, 2022, 37(11): 2813-2824.
Yao Yiming, Zhao Rongsheng, Li Chunyan, et al. Control strategy of electric vehicles oriented to power system flexibility[J]. Transactions of China Electrotechnical Society, 2022, 37(11): 2813-2824.
Introduction of Integrated Motor Drive-Charger Technologies for Electric Vehicle with Zero Torque
Abstract For application in electric vehicle, the high-voltage battery is charged through off-board or on-board battery charger. Utilization of existing traction motor and the inverter to construct AC-DC rectifier can save the hardware effectively and improve the charging power. The challenge of this strategy is how to eliminate the torque and vibration by the winding AC current during connecting to grid. This paper introduces effective methods to eliminate the torque and to make this strategy reliable and practical. The essence of the proposed methods is controlling the magneto-motive force (MMF) and regulating the spatial relationship between armature magnetic field and permanent magnetic field. These works aim to provide practical and effective solutions for on-board charging.
keywords:Electric vehicle, traction motor and inverter, integrated on-board charger, zero-torque
DOI:10.19595/j.cnki.1000-6753.tces.211180
中图分类号:TM921
国家自然科学基金资助项目(51877091)。
收稿日期 2021-08-04
改稿日期 2021-12-30
蒋 栋 男,1983年生,教授,博士生导师,研究方向为电力电子和运动控制技术等。E-mail:jiangd@hust.edu.cn
周 敏 女,1987年生,副教授,博士生导师,研究方向为电化学储能及其充放电应用等。E-mail:minzhou0729@hust.edu.cn(通信作者)
(编辑 李冰)