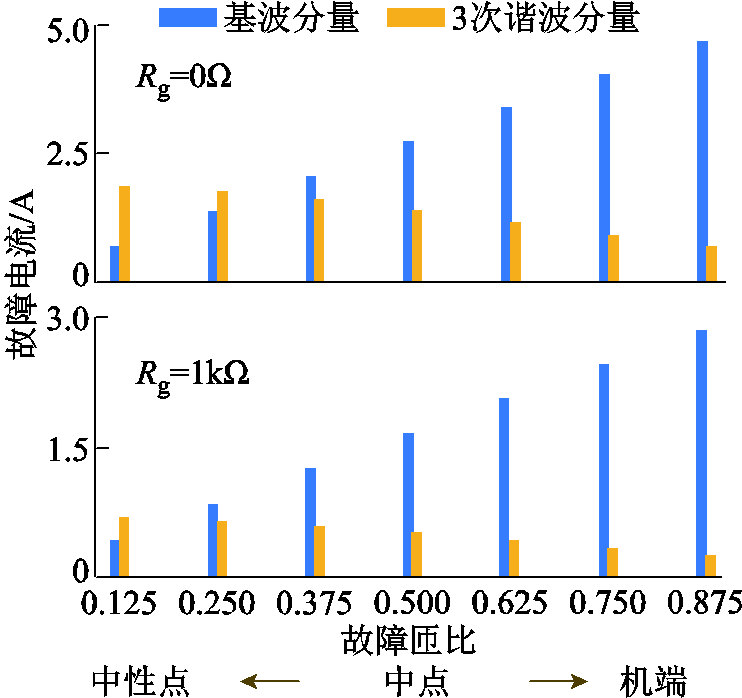
图1 发电机定子绕组接地故障电流仿真结果
Fig.1 Ground fault current simulation results of the generator stator windings
摘要 海洋核动力平台运行环境恶劣,发电机定子接地故障频发,故障严重时将损伤定子铁心,但盲目快速切机会导致核反应堆负荷失电,威胁平台安全运行。为保证发电机自身安全及核反应堆负荷供电安全,该文提出基于双频电压调控的发电机定子接地故障有源消弧及辨识方法。基于电压补偿型消弧原理,在发电机中性点外加包含基波及3次谐波分量的电压源,通过控制输出电压与故障电动势幅值相等、相位相反,抑制故障点电压为零,实现有效熄弧。在辨识接地故障类型时,与接地故障安全风险分析相结合。安全风险高的情况下,调节外加基波电压的同时控制接地故障电流在安全电流范围内,并利用瞬时性和永久性接地故障条件下中性点基波零序电流和基波零序电压间相位差的差异构建故障辨识判据。仿真和动模实验结果验证了所提方法的有效性。
关键词:海洋核动力平台 双频电压调控 定子接地故障 有源消弧 故障辨识 安全电流
海洋核动力平台用于海上工程供电、远洋海岛供电等[1],平台内主发电机承担外系统供电和站内系统应急供电的双重任务[2]。平台长期处于海浪冲击的振动环境中,发电机定子接地故障频繁发生,并常伴有电弧产生[3]。在瞬时性故障情况下,若保护快速跳闸切机,将对系统的供电可靠性和核堆运行安全性造成不利影响[4-6]。此外,较大的接地故障电流将烧损定子铁心[7-9],严重时甚至难以修复,导致平台无法正常运行。因此,需要与现有接地保护有效配合,实现接地故障消弧和故障类型辨识。
接地故障消弧包括电流型消弧方式、电压型消弧方式等。目前,发电机中性点普遍采用经消弧线圈接地方式补偿接地故障电流[10],属于电流型补偿方式。传统消弧线圈接地方式仅能部分补偿故障点工频无功残流,无法补偿有功电流和谐波电流[11],且易引起系统谐振过电压[12]。文献[13]提出消弧线圈接地方式的改进策略,通过与电力电子设备的协同配合,能够补偿一定的有功电流和谐波电流,但控制过程复杂,在发电机接地故障消弧中尚无应用。文献[14-15]提出基于电压型补偿的消弧方法,基于零序电压调控原理[16-17],通过外加注入源控制故障点电压低于电弧重燃电压,可靠消弧并抑制电弧重燃,在配电网的应用中取得了较好的消弧效果。文献[18]依据电压消弧机理,提出一种基于零序电压调控的发电机定子绕组接地故障消弧策略,能够有效抑制接地故障电流。然而,发电机相电动势中含较高的3次谐波电压分量[19-21],而该文献未考虑3次谐波影响,在近中性点侧发生接地故障时,故障电流中3次谐波含量较高,在仅补偿基波分量的情况下,故障点难以实现可靠熄弧,且较大的3次谐波故障电流会对定子铁心造成损伤,3次谐波电压对电弧的燃弧作用不能忽略。
定子接地故障辨识用于区分瞬时性和永久性接地故障,保证发电机定子接地保护能够依据故障类型自适应地决定出口控制方式。文献[18]提出基于零序电压有源调控的接地故障类型辨别方法,消弧后减小注入电流,并基于中性点基频电流变化量与基频零序电压变化量间的比例特性关系,测量并求解接地故障电流,实现接地故障辨识。然而,对于永久性接地故障,若接地故障电流较大,该方法在注入电流控制不当的条件下,接地故障电流将超过安全电流[22],对定子铁心造成二次破坏,在实际工程中无法保证设备安全。
依据电压补偿型消弧原理,本文提出发电机定子接地故障双频有源消弧策略及故障类型辨识方法。消弧过程中同时调控发电机中性点基波及3次谐波电压,可靠地控制故障点电压为零,有效熄弧并防止电弧重燃。接地故障类型辨识过程中,与故障安全风险分析相结合。对于安全风险较高的情况,在调节注入量时将接地故障电流控制在安全电流范围内,能够在可靠实现故障类型辨识的基础上避免对定子铁心造成二次损伤。PSCAD/EMTDC仿真仿真结果及动模实验结果表明,所提双频有源消弧策略在不同故障位置及接地过渡电阻条件下均能够有效熄弧;所提故障类型辨识方法能够在保证铁心安全的前提下准确区分瞬时性和永久性接地故障。
针对弧光接地故障,故障点电压降低到电弧重燃电压以下时,故障电流急剧减小,电弧不再重燃[23-24]。目前配电网中通过基波零序电压调控,抑制故障点对地电压,实现可靠熄弧。对于发电机定子绕组接地故障,受3次谐波磁动势和磁通密度影响,发电机相电压中存在3次谐波分量[25]。在任意位置发生单相接地故障时,故障点对地电压及故障电流中均包含3次谐波分量。
为防止单相接地故障发展为相间或匝间短路、避免铁心损伤,应使接地故障处不产生电弧或使电弧瞬间熄灭,对应的最大接地电流即为接地故障的安全电流[22]。海洋核动力平台运行环境恶劣,对燃弧过程十分敏感,选取安全电流阈值为1A。基于第4节中的发电机参数和仿真分析模型,发生定子绕组单相接地故障时,故障电流仿真结果如图1所示。
图1 发电机定子绕组接地故障电流仿真结果
Fig.1 Ground fault current simulation results of the generator stator windings
图1中,故障匝比表示发电机定子绕组中性点与故障点之前的匝数与完整故障分支匝数之比,本文利用故障匝比表示故障位置。分析图1仿真结果可知,接地故障电流中含有一定的3次谐波分量。以近中性点侧故障匝数占比为0.125情况为例,此时接地故障电流中3次谐波有效值为1.98A,高于安全电流阈值。进行接地故障消弧时,若仅补偿基波分量,3次谐波故障电流仍能够维持电弧燃烧,无法有效熄弧。因此在实现发电机定子绕组接地故障有源消弧时,应该同时考虑基波和3次谐波的影响。针对电动势中的其他谐波分量,由于幅值很小,不足以维持电弧燃烧,本文不作考虑。
发电机定子绕组单相接地故障时的等效示意图如图2所示,图中,EA、EB、EC分别为发电机定子绕组三相相电动势,海洋核动力平台主发电机中性点采用经高阻接地方式,RN为接地电阻,Cf为发电机定子绕组每相对地电容,Ct为直连系统在机端的每相等效对地电容。以定子绕组A相发生单相接地故障为例,接地过渡电阻为Rg,Uf和If分别为故障点对地电压和接地电流,IN为中性点电流,UN为中性点电压,Ef为故障点与中性点间电动势,简称故障电动势。
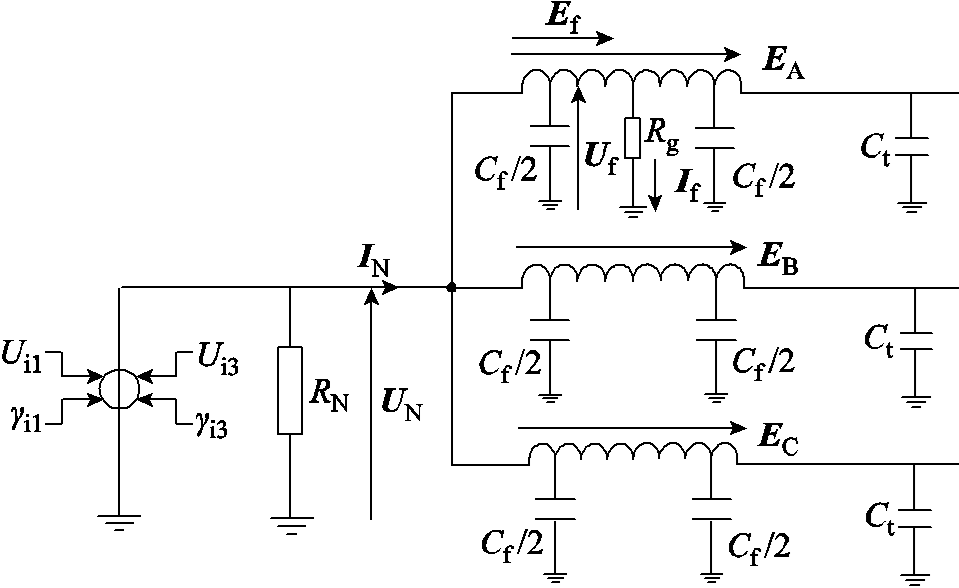
图2 发电机定子绕组单相接地故障示意图
Fig.2 Schematic diagram of the generator stator windings under single-phase ground fault
根据基尔霍夫电压定律,故障点电压满足
 (1)
(1)
考虑从本质上消除接地故障,将故障点电压强制调控为0。此时可控电压源输出电压应满足
 (2)
(2)
式中,Ui为可控电压源输出电压,其幅值和相位分别为Ui和γi。本文中各电气量的基波分量用下标“1”表示,3次谐波分量用下标“3”表示。中性点接入可控电压源时,中性点电压可由所加可控电压源进行幅值、相位任意调控,使中性点电压强制并保持为所需电压值。相关的控制策略在文献[26]中已有详细论述,在配电网的工程应用中已经取得较好的控制效果,本文不再赘述。海洋核动力平台低压系统包含储能装置,通过大功率直流逆变电源接入系统,作为系统应急备用电源使用,可用作有源消弧装置的电源。发生定子绕组单相接地故障后,通过调整可控电压源输出电压,使发电机中性点对地电压与故障电动势幅值相等、相位相反,即可控制故障点电压为0,从根源上破坏电弧重燃条件。
对于瞬时性接地故障,能够清除故障并保障发电机持续运行;对于永久性接地故障,可抑制接地故障电流,避免定子铁心受到灼伤。抑制接地故障后,可在转移负荷后平稳停机,避免因平台内核反应堆重要负荷失电影响平台运行安全。
配电网接地故障消弧仅需抑制故障相对地电压为0。而由于发电定子绕组不同位置对应的故障电动势不同,因此需要在线实现接地故障定位以计算故障电动势。海洋核动力平台发电机为汽轮发电机,定子绕组的联结及分布采用60°相带方式。若在定位时不考虑相位特征,则定位精度不够,消弧效果差。文献[27]基于基波电动势相位分布特点,结合海洋核动力平台发电机定子绕组线棒排布情况与零序回路阻抗特征,实现接地故障的准确定位与计算。其中,发电机定子绕组接地故障解析定位方程为
式中,a为故障匝比;Eφ1为基波故障相电动势; 为包含定子绕组和直连系统在内的三相对地电容之和;δ为Eφ1与-UN1之间的夹角。在数值求解时,建立定位函数为
为包含定子绕组和直连系统在内的三相对地电容之和;δ为Eφ1与-UN1之间的夹角。在数值求解时,建立定位函数为
发电机机端和中性点均装有电压互感器,可在线测量发电机机端和中性点对地电压。故障相电动势等于故障相机端与中性点对地电压的相量差。利用故障后基波零序电压和故障相电动势,在α∈[0,1]范围内寻找使f(α)最接近于0的解,即可计算出a。对应不同的α,接地过渡电阻计算式为
 (5)
(5)
海洋核动力平台发电机定子绕组采用60°相带分布形式,故障电动势Ef1的端点位于60°相带对应的圆弧上。各相量间的几何关系如图3所示。
图3 发电机定子绕组单相接地故障定位多解示意图
Fig.3 Schematic diagram of the generator stator windings multiple location solutions under single-phase ground fault
图3中,N表示发电机中性点,g1和g2代表两个不同的故障点。由于基波零序电压同时受故障位置和接地过渡电阻影响,在某些接地故障条件下,存在两组(α1, Rg1)和(α2, Rg2)故障场景下的UN1相同。此时,基于式(4)进行故障定位时将产生定位多解。为准确计算外加电源输出电压,本文提出基于3次谐波的定位结果校核判据。
3次谐波接地故障电流的在线计算方法为
 (6)
(6)
式中,DUN3为故障前后中性点3次谐波电压变化量。发电机定子绕组3次谐波电动势相位在180°的电角度范围内均匀分布[20],示意图如图4所示。
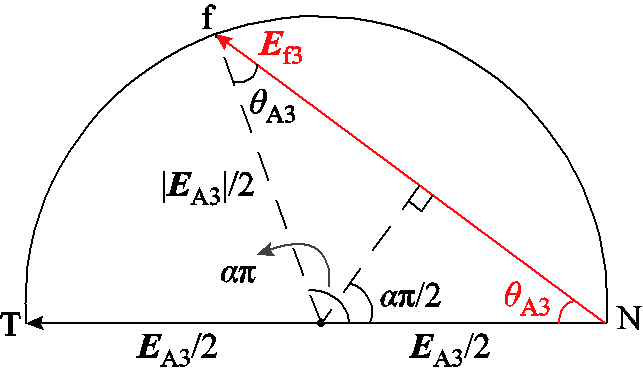
图4 故障分支三次谐波电动势分布示意图
Fig.4 Third harmonic induced potential distribution in the fault branch
图4中,T表示机端,θA3表示Ef3与EA3之间的夹角。根据各电气量间的几何关系,可求出Ef3的幅值和相位分别为
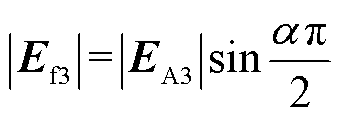 (7)
(7)
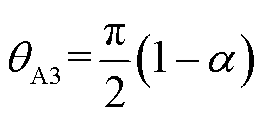 (8)
(8)
发生定子接地故障时,3次谐波电动势满足的KVL方程为Ef3=Uf3-UN3。其中,Uf3=If3Rg。结合式(7),构建定位结果检验判据为
 (9)
(9)
在解析定位时,可利用故障后两个工频周波的数据,基于式(4)计算出多个定位结果 。将计算出的所有代入式(9)中,使得g()最接近于0的值,即为最终计算结果。
。将计算出的所有代入式(9)中,使得g()最接近于0的值,即为最终计算结果。
发电机定子绕组基波电动势相位在60°的电角度范围内均匀分布,示意图如图5所示。图5中,θA1表示Ef1与EA1间的夹角。根据图中各电气量的几何关系,得到Ef1与EA1之间满足的几何关系解析表达式为
 (10)
(10)
 (11)
(11)
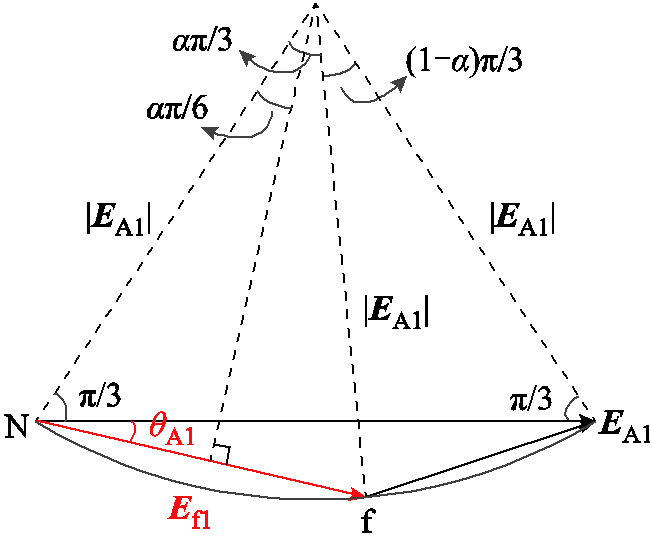
图5 故障分支基波电动势几何关系示意图
Fig.5 Schematic diagram of the geometric relation of the fault branch’s fundamental wave potential
将的最终计算结果代入式(10)、式(11),可得Ef1的幅值与相位;代入式(7)、式(8),可得Ef3的幅值与相位。外加电压源输出的基波电压与Ef1幅值相等相位相反,输出的3次谐波电压与Ef3幅值相等相位相反。
在消弧完成后,需要进行接地故障类型辨识。对于瞬时性接地故障,可直接退出外加电压源,恢复正常运行;对于永久性接地故障,应在转移负荷后平稳切机。故障类型辨识过程中,为防止永久性接地故障时故障电流较大损伤定子铁心,需要控制接地故障电流在安全电流[22,27]以内。
接地故障安全风险可通过接地故障电流进行量化分析,文献[27]中已经给出包含基波和3次谐波故障电流的在线计算方法。若初始判断的接地故障安全风险高,即接地故障电流高于安全电流阈值(1A),若此时直接退出外加电压源,对于永久性接地故障情况,接地故障电流仍会损伤定子铁心,造成二次伤害。为保证发电机定子铁心安全,需要控制接地故障电流在安全电流范围内。在完成消弧后,控制注入3次谐波电压不变,改变注入基波电压,此时接地故障电流由基波电流构成,且满足
 (12)
(12)
当接地故障电流为安全电流Ian时,故障点基波电压为IanRg,此时中性点基波电压为
 (13)
(13)
对于永久性接地故障,调节注入基波电压为式(13)计算结果时,可控制故障电流为安全电流。此时,发电机三相对地基波电流为
 (14)
(14)
则中性点基波零序电流为
 (15)
(15)
对于瞬时性接地故障,此时接地故障已经消失,三相对地电流均由对地电容电流构成,中性点基波零序电流为
 (16)
(16)
对比式(15)和式(16)可知,对于瞬时性接地故障,消弧后故障消失,中性点基波零序电流仅由各相对地电容电流构成,中性点基波零序电流超前基波零序电压90°;对于永久性接地故障,由于仍存在接地故障电流,且海洋核动力平台主发电机采用高阻接地方式[1],故障电流中含有阻性分量,中性点基波零序电流与基波零序电压间的相位差不等于90°。在构成故障辨识判据时,应保留一定裕度,根据工程经验可设定该阈值,本文取5°。即对于瞬时性接地故障,二者相位差满足
 (17)
(17)
基于式(13)计算结果改变外加电压源基波分量后,测量中性点基波零序电流和基波零序电压间的相位差,根据式(17)判据,可在保证定子铁心安全的前提下有效辨识接地故障类型。
对于接地故障安全风险低的情况,投入电压源并实现可靠熄弧后,退出外加电压源,开放定子接地保护,若定子接地保护动作,说明为永久性接地故障;若定子接地保护不动作,说明为瞬时性接地故障且已经成功消弧。
本文提出的发电机接地故障双频有源消弧策略及故障类型辨识方法流程如下:
1)基于接地故障启动判据判别是否发生发电机定子绕组接地故障,进行在线故障定位与安全风险分析。
2)基于接地故障定位结果,依据式(7)、式(8)、式(10)、式(11)计算外加电压源应输出的基波、3次谐波电压幅值和相位。
3)投入电压源,并闭锁发电机定子接地保护,在一定时间间隔后,结束消弧过程。
4)若接地故障电流低于安全电流阈值,直接退出外加电压源,并开放发电机定子接地保护。若保护不动作,说明为瞬时性接地故障且消弧成功,可恢复系统正常运行;若保护动作,说明为永久性接地故障,此时应再次投入双频有源消弧装置,待转移负荷后平稳切机。
5)若接地故障电流高于安全电流阈值,控制注入3次谐波电压不变,改变注入基波电压为式(13)计算结果,并测量此时的中性点基波零序电流。若基波零序电流与基波零序电压间的相位差满足式(17),说明为瞬时性接地故障且消弧成功,恢复系统正常运行;若不满足,说明为永久性接地故障,此时应调节输出基波电压与基波故障电动势幅值相等,抑制接地故障电流,待转移负荷后平稳切机。
海洋核动力平台主发电机每相包含2个分支绕组,每个分支由8个线圈串联构成,额定电压为10.5kV,定子绕组电阻为1.528mΩ/相,定子绕组漏电感为2.84mH/相,定子绕组电容为0.397μF/相,极对数为1,总槽数为48,对应槽距电角度为7.5°,中性点接地电阻阻值折算到一次侧为2 286Ω,直连系统对地电容为0.405μF/相。基于发电机电动势分布特征及实际参数,利用PSCAD/EMTDC软件搭建定子绕组准分布参数模型。模型中,每个分支各个线圈单元等效为基波电源、3次谐波电源、电阻、电感和电容元件的连接。以仿真模型中的一个分支为例,等效模型如图6所示。
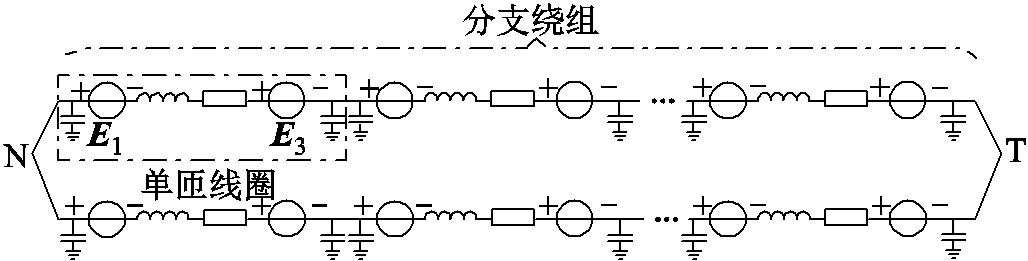
图6 发电机定子绕组每分支准分布参数模型
Fig.6 Generator stator windings’ quasi-distributed parameter model for one branch
图6中,E1和E3分别为单匝线圈对应的基波和3次谐波电动势。各匝线圈连接处故障时的基波、3次谐波故障电动势的幅值(|Ef1|、|Ef3|)和相位(φf1、φf3)见表1。
以近中性点侧不同位置发生接地过渡电阻为2kΩ的故障场景为例,利用Cassie电弧模型模拟故障点接地电阻的非线性变化过程。0.3s设置单相接地故障,从故障时刻开始,以一个工频周波为数据窗进行傅里叶变换提取基波电压,并基于式(4)计算故障匝比。设置采样率为4kHz,连续移动数据窗,在一个工频周波内可得到80个计算结果。不同故障匝比下,故障定位仿真计算结果如图7a所示。基于3次谐波判据的检验结果如图7b所示。
表1 示例发电机仿真模型故障电动势参数表
Tab.1 Fault potential of the simulation generator model

故障匝比|Ef1|/Vφf1/(°)|Ef3|/Vφf3/(°) 0.125792.93-52.5193.9622.5 0.251582.5-48.75380.4733.75 0.3752365.2-45552.3545 0.53137.9-41.25703.0156.25 0.6253897.0-37.5826.6567.5 0.754639.6-33.75918.5378.75 0.8755362.2-30975.1090 16061.9-26.25994.21101.25
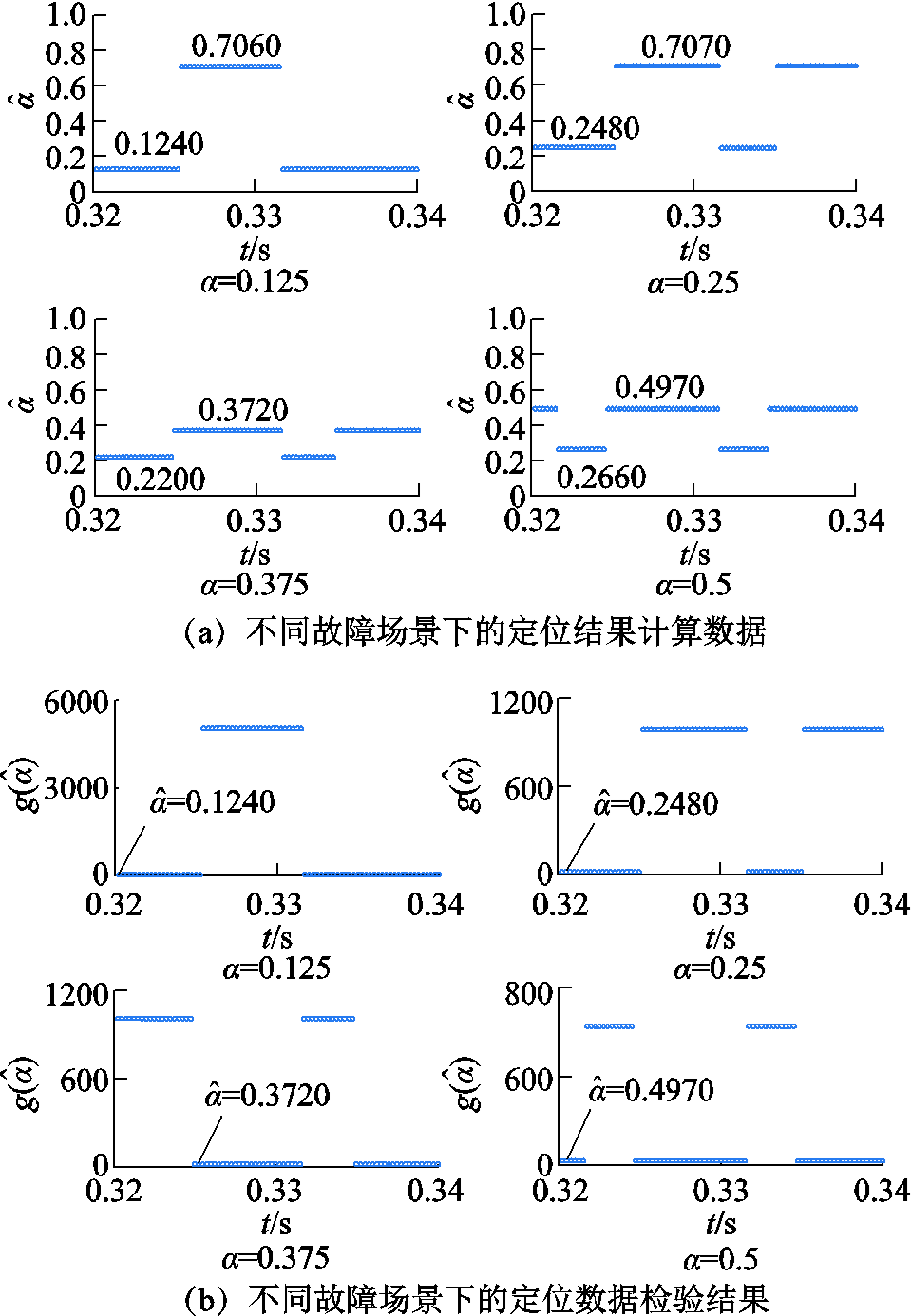
图7 不同故障场景下接地故障定位计算及检验结果
Fig.7 Calculating and checking results under different ground fault scenarios
分析接地故障定位结果可知,仅利用基波零序电压进行接地故障定位时,定位结果存在多解现象。如在α=0.25处且Rg=2kΩ情况,定位结果在0.248 0和0.707 0之间跳跃。在应用3次谐波判据检验时,正确解对应的检验函数值较小且接近于0,错误解对应的检验函数值较大。不同场景下的仿真结果均表明所提检验判据可以有效筛选出正确的定位结果。
在不同故障匝比、不同接地过渡电阻下进行仿真分析,并基于定位结果在线计算故障电动势,计算结果见表2。
表2 故障电动势在线计算结果
Tab.2 Fault potential online calculation results under 100% load operating state

故障场景中间测量数据计算结果 αRg/Ω|UN1|/V|EA1|/Vδ/(°)|EA3|/VUN3/V△UN3/V|Ef1|∠φf1|Ef3|∠φf3 0.125100750.006 062.3731.30994.1777.75+j35.49-660.08+j100.750.125 0123.27792.97V∠-52.50°193.95V∠22.50° 200713.446 062.3635.09994.22140.99+j149.61-596.84+j13.360.125 0226.23792.97V∠-52.50°193.96V∠22.50° 500609.556 064.6444.51994.53349.71+j278.97-388.12+j142.720.125 2540.10794.56V∠-52.49°194.33V∠22.52° 0.251001 486.856 062.3528.08993.70160.44-j138.63-577.39-j274.880.249 0136.281 576.32V∠-48.78°378.83V∠33.66° 2001 409.886 061.4731.63993.66180.90-j21.09-556.93-j157.330.250 0234.551 582.44V∠-48.75°380.26V∠33.75° 5001 204.576 062.8941.47993.98331.75+j158.88-406.09+j22.640.251 0569.261 589.05V∠-48.72°381.82V∠33.84° 0.3751002 227.616 062.4824.20993.34305.50-j258.94-432.33-j395.180.375 0133.672 365.57V∠-45.00°551.87V∠45.00° 2002 119.986 062.3027.95993.39292.02-j144.97-445.82-j281.220.376 0237.442 371.60V∠-44.97°553.19V∠45.09° 5001 818.156 062.3937.23993.59378.21+j54.94-359.63-j81.300.376 0549.712 371.64V∠-44.97°553.31V∠45.09° 0.501002 967.476 062.6920.15993.15479.10-j300.55-258.72-j436.800.501 0126.643 144.68V∠-41.22°703.37V∠56.34° 2002 824.826 062.1723.65993.12439.51-j209.46-298.32-j345.710.501 0221.663 144.14V∠-41.22°703.34V∠56.34° 5002 423.836 062.1232.99993.31460.87-j22.43-276.96-j158.680.502 0531.683 150.15V∠-41.19°704.58V∠56.43° 0.6251003 694.396 063.0416.21993.27654.66-j272.10-83.17-j408.340.626 0121.733 903.76V∠-37.47°826.74V∠67.59° 2003 517.366 063.3919.87993.25599.98-j212.03-137.85-j348.280.626 0220.813 904.25V∠-37.47°826.72V∠67.59° 5003 018.966 063.0829.16993.34566.98-j61.83-170.85-j198.070.626 0527.423 903.80V∠-37.47°826.80V∠67.59° 0.751004 405.306 063.5312.34993.66805.38-j178.2167.55-j314.450.751 0118.634 646.75V∠-33.72°918.62V∠78.84° 2004 194.646 063.4716.08993.53748.78-j152.4410.95-j288.690.750 0218.834 640.77V∠-33.75°917.90V∠78.75° 5003 600.976 063.3825.00993.48680.16-j57.15-57.67-j193.390.750 0510.554 640.69V∠-33.75°917.85V∠78.75° 0.8751005 097.176 064.168.50994.24908.10-j33.57170.27-j169.810.877 0117.085 375.65V∠-29.94°975.74V∠90.18° 2004 853.746 063.9112.12994.06862.96-j39.99125.13-j176.230.876 0213.735 369.71V∠-29.97°975.26V∠90.09° 5004 167.306 063.3721.36993.81782.88-j9.0145.05-j145.250.875 0514.745 363.56V∠-30.00°974.71V∠90.00° 11005 766.986 064.954.68994.83946.95+j139.32209.12+j3.081.000 0113.756 064.91V∠-26.25°994.83V∠101.25° 2005 491.806 062.568.53994.67924.84+j107.88187.01-j28.361.000 0217.416 062.58V∠-26.25°994.67V∠101.25° 5004 715.536 064.0717.56994.34859.22+j75.28121.39-j60.960.999 8512.616 062.97V∠-26.26°994.34V∠101.23°
由于α的取值范围是[0, 1],因此当计算结果 >1时,取值为1。所有定位结果的最大误差为0.4%。以其中α=0.25且Rg=500Ω情况为例,此时基波故障电动势计算结果为1 589.05V∠-48.72°,与表1中给出的理论值相比,幅值计算误差为0.41%,相位计算误差为0.06%;3次谐波故障电动势计算结果为381.82V∠33.84°,与理论值相比,幅值计算误差为0.35%,相位计算误差为0.27%。对于接地过渡电阻的计算结果,由于仿真过程中接地电阻采用非线性电弧模型,因此接地过渡电阻的计算结果为燃弧过程中的“平均值”,相较于设置的接地过渡电阻值偏大。
为验证所提消弧方法的有效性,以0.2s时在发电机定子绕组距离中性点侧α=0.125处发生单相接地故障为例进行仿真分析,接地过渡电阻为200Ω。0.22s时向发电机中性点注入幅值为792.97V、相位为127.5°的基波电压,同时注入幅值为193.96V、相位为-157.5°的3次谐波电压。故障点电压与接地故障电流仿真结果如图8所示。
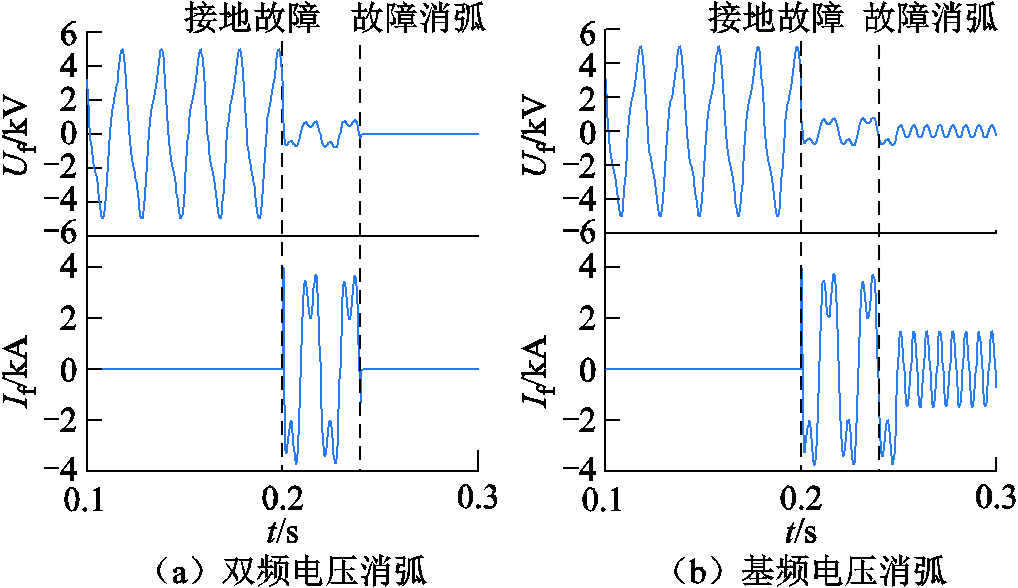
图8 接地故障消弧仿真结果
Fig.8 Simulation results of grounding fault arc suppression
采用双频电压消弧条件下,消弧后故障点对地电压有效值为6.86V,接地故障电流有效值为0,实现可靠熄弧;若仅注入基频电压,消弧后故障点仍存在较高的3次谐波电压,对地电压有效值为293.66V,接地故障电流有效值为1.13A,无法实现可靠熄弧。此时接地故障电流主要为3次谐波电流,其幅值高于安全电流阈值,对定子铁心安全不利。不同接地故障场景下的消弧仿真结果见表3。
表3 不同接地故障场景下的消弧效果
Tab.3 Ground arc suppression effect under different fault conditions

故障场景Uf/VIf/A 故障匝比Rg/Ω补偿前补偿后补偿前补偿后 0.125100250.570.231.800 200385.930.241.670 500658.501.591.170 0.25100276.186.722.100 200448.051.421.920 500801.566.721.490 0.375100313.737.612.450 200521.376.262.270 500988.606.261.850 0.5100359.636.852.890 200611.976.862.740 5001 202.150.542.270 0.625100406.086.903.400 200710.516.913.220 5001 429.306.912.730 0.75100461.827.584.220 200815.472.963.740 5001 661.762.963.190
(续)
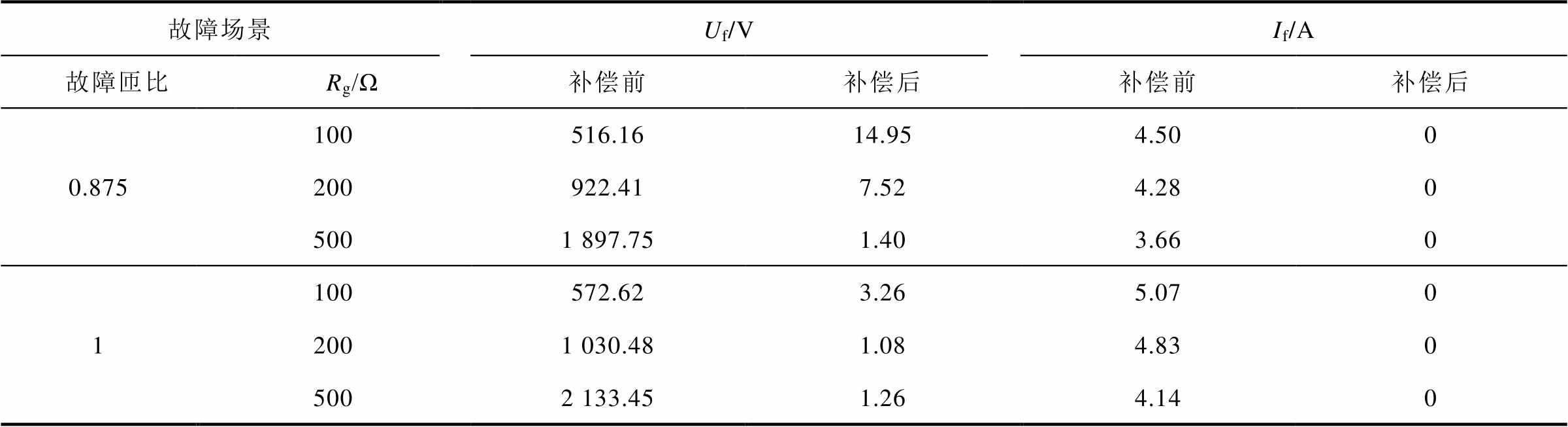
故障场景Uf/VIf/A 故障匝比Rg/Ω补偿前补偿后补偿前补偿后 0.875100516.1614.954.500 200922.417.524.280 5001 897.751.403.660 1100572.623.265.070 2001 030.481.084.830 5002 133.451.264.140
表3中,在不同接地故障条件下,本文方法均能够将故障点电压钳位至一个较小值,阻止电弧重燃。该方法不受故障匝比及接地过渡电阻影响,能够为发电机定子接地故障提供可靠的消弧保障。
在安全风险较低情况下,直接开放接地保护,对于瞬时性故障而言,保护不会动作,系统恢复正常运行状态;在安全风险较高情况下,需采用本文提出的结合安全风险分析的故障辨识方法。在完成接地故障消弧后,控制外加电源输出的3次谐波电压不变,调节基波输出电压。以接地故障电阻为200Ω的情况为例进行分析,设置安全电流为1A,基于式(13)计算得到不同接地故障匝比下,需要调控的基波电压见表4。
表4 故障辨识时的基波电压注入量
Tab.4 Fundamental voltage injection quantity during fault identification
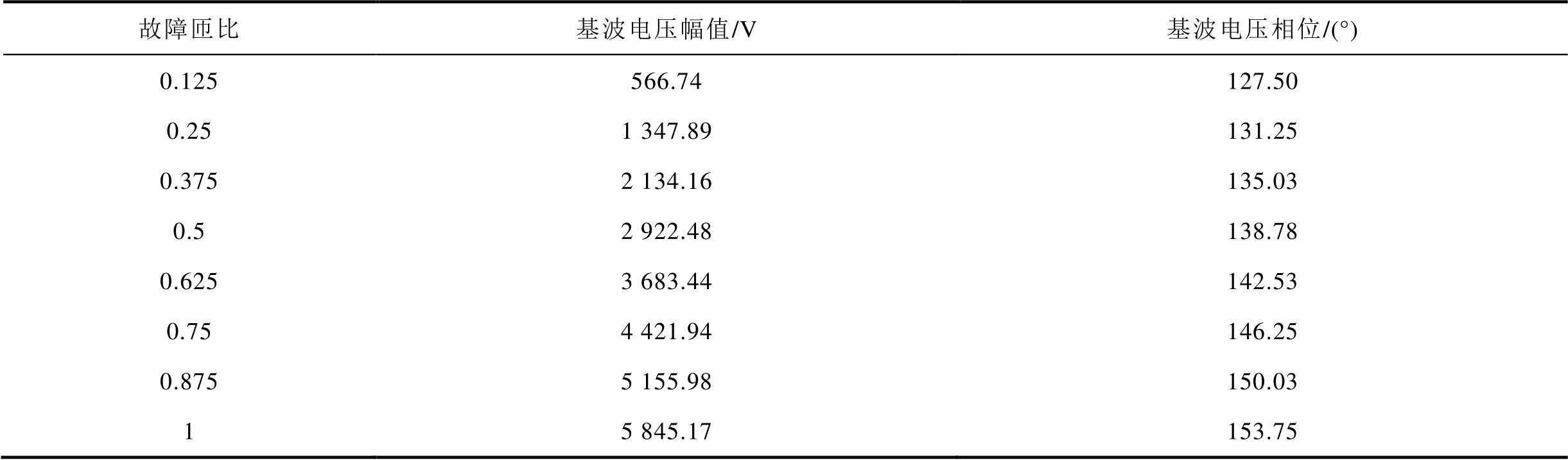
故障匝比基波电压幅值/V基波电压相位/(°) 0.125566.74127.50 0.251 347.89131.25 0.3752 134.16135.03 0.52 922.48138.78 0.6253 683.44142.53 0.754 421.94146.25 0.8755 155.98150.03 15 845.17153.75
以α=0.5处的单相接地故障为例进行分析。于0.2s时分别设置瞬时性接地故障和永久性接地故障,0.24s投入电压源,0.3s改变注入基波电压,接地故障电流、中性点基波零序电流与基波零序电压间的相位差仿真结果如图9所示。
分析图9仿真结果可知,改变基波注入电压后,对于瞬时性接地故障,由于故障已经消失,因此接地故障电流为0,中性点基波零序电流与基波零序电压间相位差为89.79°,满足式(17)判据,判定为瞬时性接地故障,恢复系统正常运行;对于永久性接地故障,由于未改变3次谐波注入电压,接地故障电流由基波接地故障电流构成,故障电流有效值为0.76A,小于安全电流阈值,故障辨识过程不会对定子铁心造成二次损伤,此时中性点基波零序电流与基波零序电压间相位差为108.31°,不满足式(17)判据,判定为永久性接地故障,之后恢复注入基波电压至原有值,转移负荷后平稳停机。
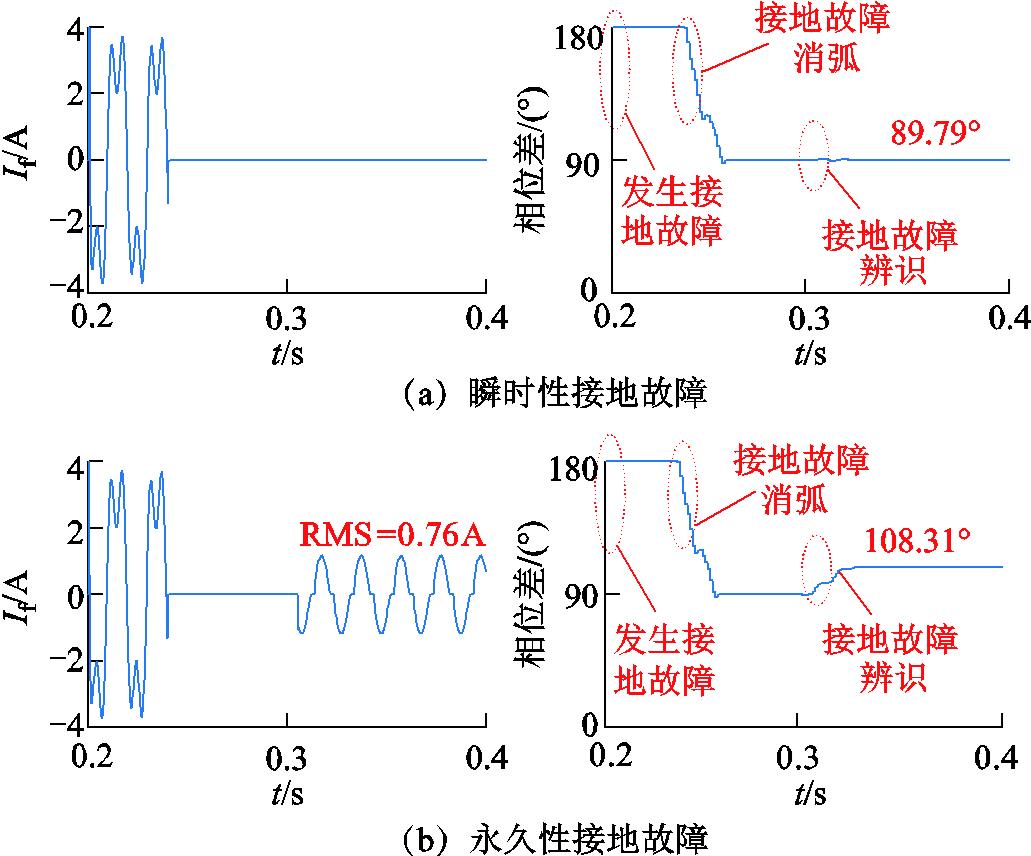
图9 接地故障辨识仿真结果
Fig.9 Simulation results of ground fault identification
对其他故障匝比情况进行仿真分析,结果见表5。仿真结果均表明所提方法能够可靠区分瞬时性和永久性接地故障。
表5 不同故障匝比下故障辨识结果
Tab.5 Fault potential of the simulation generator model

故障匝比瞬时性故障下相位差/(°)永久性故障下相位差/(°)永久性故障辨识中故障电流/A 0.12589.91149.950.82 0.2589.90128.720.86 0.37589.86116.630.85 0.589.79108.310.76 0.62589.78106.340.76 0.7589.78104.160.78 0.87589.79102.680.72 189.77100.530.71
利用动模实验验证所提方法的有效性,所用动模发电机容量为15kV·A,额定电压为400V,发电机每相2个分支,极对数为1,总槽数为48。发电机定子绕组对地电容为0.626μF/相,机端外加对地电容为0.5μF/相。发电机A相分支绕组上存在几个引出的抽头,可通过滑线变阻器与发电机外壳连接,用于模拟α=0.25, 0.50, 1处的单相接地故障。发电机中性点通过接地变压器经高阻接地,接地变压器电压比为210V:100V,接地电阻阻值为1kΩ,折算至一次侧为4 410Ω。由于接地变阻抗较小,分析计算时可忽略其影响。为模拟双频有源电压消弧装置,在中性点外加可编程交流电源,该电源容量为15kV·A,单相输出电压幅值调节范围为0~300V,相位调节范围为-180°~ +180°,频率调节范围为15~1 600Hz,可同时输出任意幅值和相位的基波和3次谐波电压,满足动模实验机组接地故障消弧要求。动模实验系统的接线如图10所示,图10中,TV1、TV2、TV3为电压互感器,TA1、TA2为电流互感器,KD、KY为开关。动模实验系统实物如图11所示。
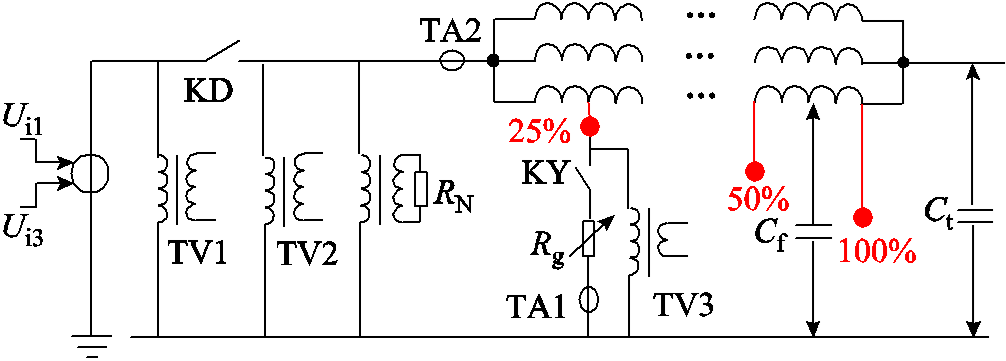
图10 动模实验系统主接线
Fig.10 Electrical connection diagram of the dynamic experimental system

图11 动模实验系统实物
Fig.11 A picture of the dynamic experiment system
首先在A相第一分支不同抽头处设置接地过渡电阻为200Ω的单相接地故障,利用故障前后两个周波数据进行接地故障定位,利用基波电压得到的定位结果数据点及利用3次谐波电压得到的校验结果如图12所示。
实验结果表明,仅利用基波零序电压进行接地故障定位时,存在定位多解现象。结合所提3次谐波校验方法,能够筛选出正确的定位结果,计算结果见表6。
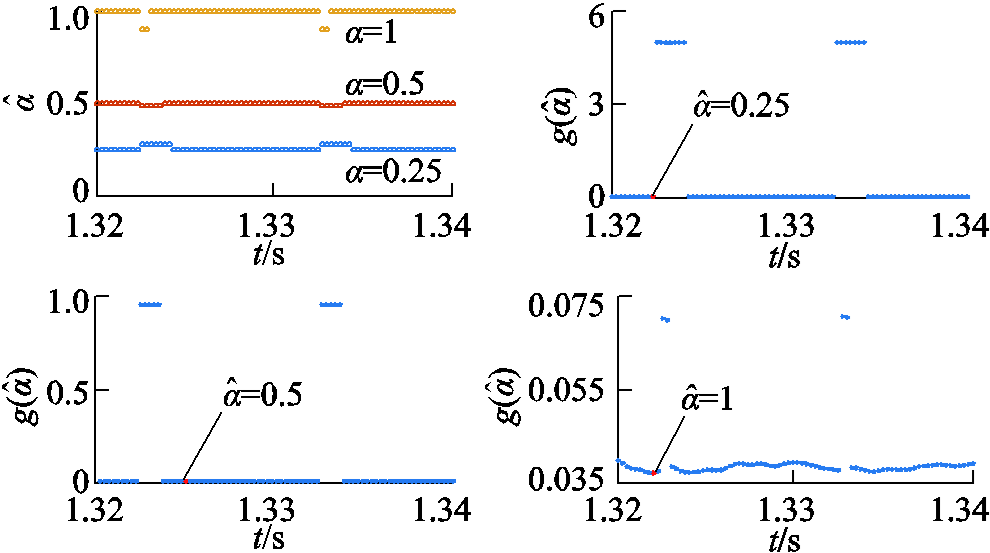
图12 故障定位及检验结果
Fig.12 Fault location and checking results
表6 故障电动势计算结果
Tab.6 Fault potential calculation results

故障匝比|Ef1|∠φf1|Ef3|∠φf3 0.250.25200.2Ω58.14V∠-66.75°1.11V∠56.25° 0.50.5200.3Ω115.30V∠-59.25°2.05V∠78.75° 11200.1Ω222.83V∠-44.25°2.91V∠123.75°
实验过程中,为保证动模机组安全,采用滑线电阻器作为接地过渡电阻,其阻值恒定,因此计算出的接地过渡电阻与设置值相近。根据故障电动势计算结果,调节可编程交流电源输出电压与故障电动势幅值相等、相位相反。以机端处接地故障为例,接地电阻为200Ω。故障相相电动势与可控电压源输出电压如图13所示。
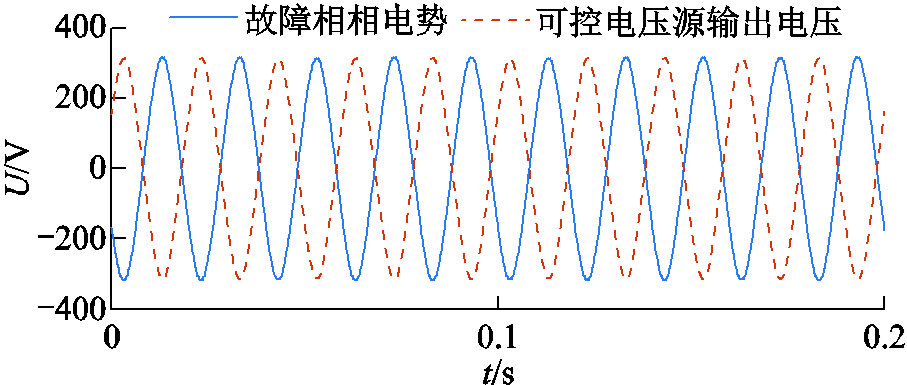
图13 故障电动势及外加电源输出电压
Fig.13 Fault potential and external power supply output voltage
由于在机端设置接地故障,故障相相电动势即为故障电动势。对比可知,此时可控电压源输出电压与故障电动势幅值相等、相位相反。设置接地故障后,将可控电压源接入发电机中性点,故障点对地电压及接地故障电流波形如图14所示。
A相机端发生接地故障后,故障相电压降低,非故障相电压升高。在投入外加电压源后,故障点对地电压降低,有效值为0.14V,故障电流抑制为0。由于中性点电压调控,非故障相电压升至线电压,由于系统绝缘按照线电压水平设计,不会对系统绝缘安全造成影响。
由于动模机组电压等级低,接地故障电流本身较小。为测试所提故障辨识方法的有效性,控制可控电压源输出的3次谐波电压不变,输出基波电压幅值减半,变为111.42V。在改变可控电压源输出电压前,通过控制接地故障支路的开合来模拟瞬时性、永久性接地故障,中性点基波零序电压与中性线基波零序电流间相位差波形如图15所示。
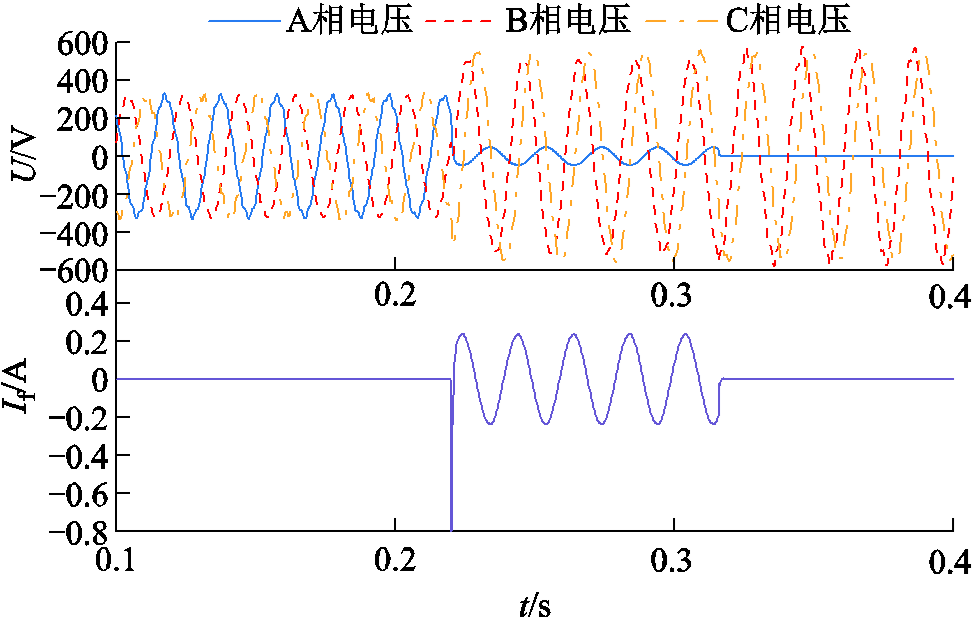
图14 接地故障消弧实验结果
Fig.14 Experimental results of arc suppression
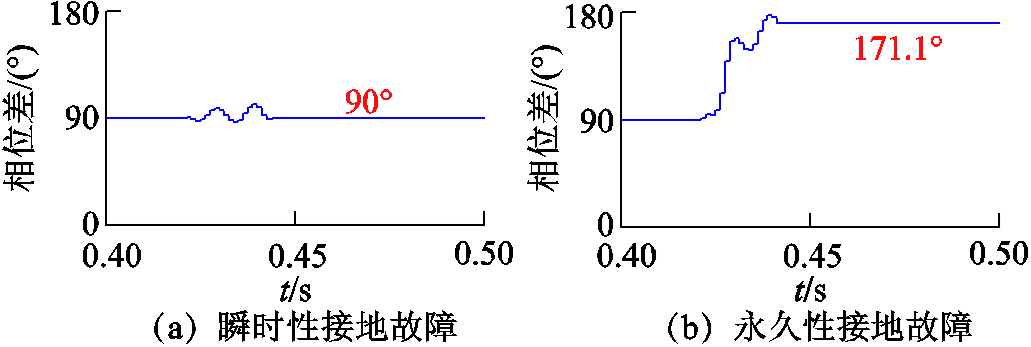
图15 故障类型辨识实验结果
Fig.15 Experimental results of fault type identification
瞬时性接地故障情况下,由于故障支路已经断开,中性线基频电流仅由电容电流构成,与基波零序电压间的夹角为90°,满足式(17)判据;对于永久性接地故障,中性线基频电流包含一定的阻性电流,测得的相位差为171.1°,不满足式(17)判据。所提方法能够有效辨识瞬时性和永久性接地故障。
本文针对海洋核动力平台的安全运行需求,提出发电机定子接地故障双频有源消弧策略及故障类型辨识方法,并得出以下结论:
1)发电机定子绕组接地故障消弧过程中,由于同时考虑了基波及3次谐波分量,能够可靠抑制故障点并实现有效熄弧。
2)结合接地故障安全风险分析实现故障类型辨识过程中,调节可控电压源输出的基波电压量,控制接地故障电流在安全范围内,在可靠实现故障类型辨识的基础上避免对定子铁心造成二次损伤。
3)仿真及动模实验结果表明,所提消弧方法在不同接地故障位置及接地过渡电阻条件下均能够有效熄弧;所提故障辨识方法能够在保证铁心安全的前提下准确区分瞬时性和永久性接地故障。
本文所提方法同样适用于大型发电机定子绕组的接地故障电弧抑制。在新型电力系统中,能够在保证发电机铁心安全的前提下实现柔性解列,避免对电网造成冲击。
参考文献
[1] 尹项根, 王义凯, 李鹏, 等. 海洋核动力平台电网安全问题及保护技术研究[J]. 电力系统保护与控制, 2020, 48(22): 9-17.
Yin Xianggen, Wang Yikai, Li Peng, et al. Study on security problems and protection technologies of the floating nuclear power plant grid[J]. Power System Protection and Control, 2020, 48(22): 9-17.
[2] Wang Yikai, Yin Xianggen, Qiao Jian, et al. Inrush current suppression technology for floating nuclear power plants based on connecting Pre-T in series[J]. International Journal of Electrical Power & Energy Systems, 2022, 135: 107508.
[3] Wang Yikai, Yin Xin, Xu Wen, et al. Fault line selection incooperation with multi-mode grounding control for thefloating nuclear power plant grid[J]. Protection and Control of Modern Power Systems, 2020, 5(1): 1-10.
[4] 郝亮亮, 李佳慧, 段贤稳, 等. 核电多相环形无刷励磁机转子绕组短路故障特征分析[J]. 电工技术学报, 2020, 35(6): 1251-1261.
Hao Liangliang, Li Jiahui, Duan Xianwen, et al. Characteristic analysis of short-circuit fault in rotor winding of nuclear power multi-phase annular brushless exciter[J]. Transactions of China Electrotechnical Society, 2020, 35(6): 1251-1261.
[5] 田代宗, 孙宇光, 王善铭, 等. 多相整流永磁同步发电机绕组内部相间短路的故障分析[J]. 电工技术学报, 2020, 35(6): 1262-1271.
Tian Daizong, Sun Yuguang, Wang Shanming, et al. Analysis of stator internal phase-to-phase short-circuit in the multiphase permanent magnet synchronous generator with rectifier load system[J]. Transactions of China Electrotechnical Society, 2020, 35(6): 1262-1271.
[6] 何玉灵, 张文, 张钰阳, 等. 发电机定子匝间短路对绕组电磁力的影响[J]. 电工技术学报, 2020, 35(13): 2879-2888.
He Yuling, Zhang Wen, Zhang Yuyang, et al. Effect of stator inter-turn short circuit on winding electromagnetic forces in generators[J]. Transactions of China Electrotechnical Society, 2020, 35(13): 2879-2888.
[7] 谭力铭, 尹项根, 王义凯, 等. 自适应工况的大型水轮发电机定子接地故障定位方法[J]. 电工技术学报, 2022, 37(17): 4411-4422.
Tan Liming, Yin Xianggen, Wang Yikai, et al. An adaptive load-based location method of stator ground fault for large hydro-generators[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4411-4422.
[8] 高俊国, 孟睿潇, 胡海涛, 等. 电机定子绝缘老化寿命预测研究进展[J]. 电工技术学报, 2020, 35(14): 3065-3074.
Gao Junguo, Meng Ruixiao, Hu Haitao, et al. Research progress on prediction of aging life of motor stator insulation[J]. Transactions of China Electrotechnical Society, 2020, 35(14): 3065-3074.
[9] 康逸群, 宋梦琼. 大型发电机注入式定子接地保护应用与分析[J]. 电气技术, 2020, 21(1): 129-132.
Kang Yiqun, Song Mengqiong. Application and analysis of voltage-injection stator ground protection for large-sized generator[J]. Electrical Engineering, 2020, 21(1): 129-132.
[10] 毕大强, 王祥珩, 王维俭. 大型水轮发电机中性点接地方式的若干问题分析[J]. 电工技术学报, 2002, 17(4): 7-12.
Bi Daqiang, Wang Xiangheng, Wang Weijian. Study on how to ground for the neutral point of large-sized hydro-generator[J]. Transactions of China Electrotechnical Society, 2002, 17(4): 7-12.
[11] Wang Wen, Yan Lingjie, Zeng Xiangjun, et al. Principle and design of a single-phase inverter-based grounding system for neutral-to-ground voltage compensation in distribution networks[J]. IEEE Transactions on Industrial Electronics, 2017, 64(2): 1204-1213.
[12] Yu Kun, Liu Zhanlei, Zeng Xiangjun, et al. A novel full compensation method for the ground fault current of resonant grounded systems[J]. Electrical Engineering, 2021, 103(3): 1569-1581.
[13] 周兴达, 陆帅. 一种基于消弧线圈和静止同步补偿器协同作用的配电网消弧结构与方法[J]. 电工技术学报, 2019, 34(6): 1251-1262.
Zhou Xingda, Lu Shuai. An arc-suppression method based on the coordinated operation of the petersen coil and the static synchronous compensator in distribution networks[J]. Transactions of China Electrotechnical Society, 2019, 34(6): 1251-1262.
[14] Wang Wen, Zeng Xiangjun, Yan Lingjie, et al. Principle and control design of active ground-fault arc suppression device for full compensation of ground current[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 4561-4570.
[15] Fan Bishuang, Yao Ganzhou, Wang Wen, et al. Principle and control design of a novel hybrid arc suppression device in distribution networks[J]. IEEE Transactions on Industrial Electronics, 2022, 69(1): 41-51.
[16] 刘宝稳, 曾祥君, 马宏忠, 等. 参数不对称配电线路的等效模型与接地故障检测方法[J]. 电力系统自动化, 2022, 46(13): 159-167.
Liu Baowen, Zeng Xiangjun, Ma Hongzhong, et al. Equivalent model and grounding fault detection method for distribution lines with asymmetry parameters[J]. Automation of Electric Power Systems, 2022, 46(13): 159-167.
[17] 蒋顺平, 丁勇, 石祥建, 等. 位移过电压抑制转接地故障消弧的柔性电源控制方法[J]. 电力系统自动化, 2021, 45(20): 140-147.
Jiang Shunping, Ding Yong, Shi Xiangjian, et al. Control method of displacement overvoltage suppression switching to ground fault arc-suppression for flexible power source[J]. Automation of Electric Power Systems, 2021, 45(20): 140-147.
[18] 徐雯, 王义凯, 尹项根, 等. 基于零序电压有源调控的发电机定子接地故障消弧方法及保护对策[J]. 电力自动化设备, 2022, 42(4): 197-202.
Xu Wen, Wang Yikai, Yin Xianggen, et al. Arc suppression method and protection countermeasures of generator stator grounding fault based on active control of zero-sequence voltage[J]. Electric Power Automation Equipment, 2022, 42(4): 197-202.
[19] Friedemann D F, Motter D, Oliveira R A. Stator-ground fault location method based on third-harmonic measures in high-impedance grounded generators[J]. IEEE Transactions on Power Delivery, 2021, 36(2): 794-802.
[20] Wang Yikai, Yin Xianggen, Qiao Jian, et al. Generator stator windings ground fault diagnosis for generator-grid directly connected system of floating nuclear power plant[J]. Energy Reports, 2021, 7: 460-469.
[21] 尹项根, 王义凯, 谭力铭, 等. 故障机理深度关联的大型发电机保护新原理探讨[J]. 电力系统保护与控制, 2021, 49(22): 1-7.
Yin Xianggen, Wang Yikai, Tan Liming, et al. Discussion on a new principle of large generator protection deeply associated with fault mechanisms[J]. Power System Protection and Control, 2021, 49(22): 1-7.
[22] 王维俭. 电气主设备继电保护原理与应用[M]. 2版. 北京: 中国电力出版社, 2002.
[23] 曾祥君, 卓超, 喻锟, 等. 基于接地变压器绕组分档调压干预的配电网主动降压消弧与保护新方法[J]. 中国电机工程学报, 2020, 40(5): 1523-1534.
Zeng Xiangjun, Zhuo Chao, Yu Kun, et al. A novel method of faults arc extinguishing and feeder protection based on voltage regulating intervention with grounding transformer winding taps for distribution networks[J]. Proceedings of the CSEE, 2020, 40(5): 1523-1534.
[24] 卓超, 曾祥君, 彭红海, 等. 配电网接地故障相主动降压消弧成套装置及其现场实验[J]. 电力自动化设备, 2021, 41(1): 48-58.
Zhuo Chao, Zeng Xiangjun, Peng Honghai, et al. Arc suppression device with active reduction of grounding fault phase voltage and field test for distribution networks[J]. Electric Power Automation Equipment, 2021, 41(1): 48-58.
[25] 王义凯, 谭力铭, 尹项根, 等. 基于电压相量差的发电机GCB失灵保护新原理[J]. 电力自动化设备, 2022, 42(3): 182-188.
Wang Yikai, Tan Liming, Yin Xianggen, et al. Novel principle of generator circuit breaker failure protection based on voltage phasor difference[J]. Electric Power Automation Equipment, 2022, 42(3): 182-188.
[26] 曾祥君, 李理, 喻锟, 等. 抑制配电网三相不平衡的柔性接地装置控制方法[J]. 电力科学与技术学报, 2020, 35(3): 19-28.
Zeng Xiangjun, Li Li, Yu Kun, et al. Research on control method of flexible grounding device for suppressing three-phase unbalance in distribution network[J]. Journal of Electric Power Science and Technology, 2020, 35(3): 19-28.
[27] 王义凯, 尹项根, 乔健, 等. 海洋核动力平台发电机定子绕组单相接地故障风险分析与实时定位[J]. 电力自动化设备, 2022, 42(4): 178-183.
Wang Yikai, Yin Xianggen, Qiao Jian, et al. Risk analysis and real-time locating of single-phase grounding fault of generator stator winding for offshore nuclear power plant[J]. Electric Power Automation Equipment, 2022, 42(4): 178-183.
Generator Stator Ground Fault Active Arc Suppression and Fault Type Identification Method Based on Dual-Frequency Voltage Regulation
Abstract The operation environment of floating nuclear power plant is harsh, and the generator stator ground fault occurs frequently. When the fault risk is serious, the stator iron core will be damaged, but blind cutting will lead to power loss of important loads, threatening the safe operation of the plant. This paper presents the method of stator ground fault arc elimination and fault type identification based on dual-frequency voltage regulation. Firstly, based on the arcelimination principle of voltage compensation, a voltage source containing fundamental and third harmonic components is applied to the generator neutral point. Its output voltage is controlled as the same amplitude and opposite phase with the fault electric potential, then the voltage at the fault point is suppressed to zero to achieve effective arc extinguishing. Ground fault type identification is realized combining with ground fault safety risk analysis. Under high risk conditions, at the same time of adjusting the fundamental injection voltage, the ground fault current is controlled within the safety current range. The instantaneity and permanent ground faults are identified based on the criterion of phase difference between the fundamental zero-sequence current and the neutral point voltage. Simulation and dynamic test results verify the effectiveness of the proposed method.
keywords:Floating nuclear power plant, dual-frequency voltage regulation, stator ground fault, active arc suppression, fault type identification, safety current
DOI:10.19595/j.cnki.1000-6753.tces.221177
中图分类号:TM312
国家自然科学基金(52007010)和国家重点研发计划(2017YFC0307800)资助项目。
收稿日期 2022-06-21
改稿日期 2022-08-02
王义凯 男,1996年生,博士研究生,研究方向为电力系统继电保护。E-mail:742657004@qq.com
尹项根 男,1954年生,博士,博士生导师,研究方向为电力系统继电保护。E-mail:xgyin@hust.edu.cn(通信作者)
(编辑 赫蕾)