
图1 CWBLDCM的拓扑结构
Fig.1 Topology of the CWBLDCM
摘要 环形绕组无刷直流电机(CWBLDCM)是一种新型的多相非正弦永磁电机,其转矩性能与绕组电流换向过程密切相关。该文提出了一种利用绕组自身反电动势和母线电压来改善电机转矩性能的混合换向方法,该方法有两个换向控制参数(β,γ),随着控制参数的变化,换向过程可能呈现出四种典型的换向状态。首先对各换向状态进行了分析、仿真和实验验证;然后比较了不同换向状态下的转矩性能;最后根据比较结果,提出了一种针对CWBLDC电机转矩性能的优化控制策略。
关键词:无刷直流电机 换向方法 转矩密度 转矩脉动
永磁电机不仅在中、低功率场合中得到了广泛的应用[1-4],而且在船舶推进等大功率应用中也得到了广泛的关注[5-7]。永磁同步电机(PermanentMagnetSynchronous Motor, PMSM)由于其气隙磁场为正弦且由正弦电流驱动,转矩脉动较小,但理论上其转矩密度比传统的无刷直流电机(Brushless DC Motor, BLDCM)低15%左右[8],但BLDCM的换向转矩脉动较大[9-11],不适合应用在大功率、高性能的场合。
环形绕阻无刷直流电机(Circular Winding Brushless DC Motor, CWBLDCM)具有转矩密度高、转矩脉动小的特点[12]。通过适当的设计,其转矩密度高于传统的BLDCM,而转矩脉动甚至能达到与永磁同步电机接近的水平,因此在大功率推进领域具有良好的应用前景[13-14]。文献[15]提出了CWBLDCM的负载换向方法(Load Commutation Method, LCM),并在文献[16]中进行了分析研究。在这种换向方法中,绕组反电动势是驱动绕组电流换向的唯一手段,其换向电路开关选用晶闸管。
图1为一台2极9相CWBLDCM的拓扑结构,其定子电枢绕组环形连接,转子表面永磁体提供方波磁场。图2a为该CWBLDCM的负载换向电路,LCM的优点是晶闸管具有软开关特性,因此开关损耗很低,且晶闸管更适合大功率应用。但是LCM有两个明显的缺点:①晶闸管的关断不能由门极信号控制,因此当负载波动时,存在晶闸管不能关断的风险;②负载越大,电路开始换向所需的提前时间就越长[15],从而导致电机在大负载转矩时功率因数较低,转矩输出能力变弱。
图1 CWBLDCM的拓扑结构
Fig.1 Topology of the CWBLDCM
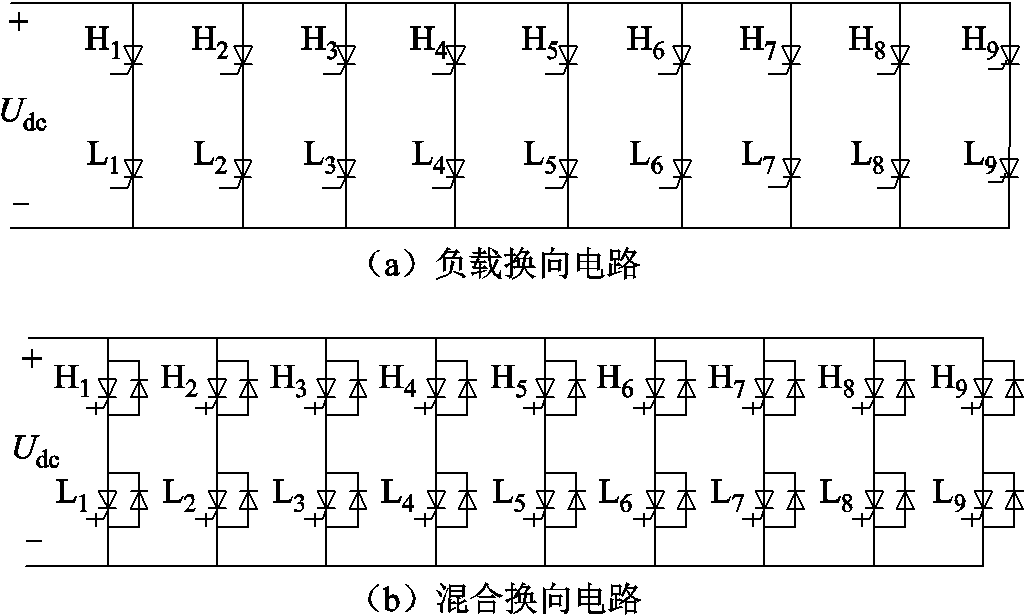
图2 CWBLDCM的换向电路
Fig.2 Commutation circuit of the CWBLDCM
为了克服LCM的不足,本文提出了一种基于全控开关的混合换向方法(Hybrid Commutation Method, HCM),如图2b所示。混合换向电路的每个换向支路由两个全控开关组成,每个开关反并联一个二极管。由于该方法同时利用绕组反电动势和母线电压来驱动绕组电流换向,换向能力优于LCM。根据HCM的工作原理,其换向过程可以被分类成四种典型状态。本文首先利用动态模型[16]对样机的混合换向过程进行仿真;然后比较样机在不同换向状态下的转矩性能;最后提出了一种实用的CWBLDCM优化控制策略。
CWBLDCM的主要特征如下:①转子为永磁体表贴式,气隙磁场为方波;②绕组相数较多,呈环形连接;③工作原理与传统有刷直流电机相似,但电流换向由开关器件而不是机械换向器来实现。
与传统的BLDCM相比,CWBLDCM具有相似的转子结构和空载气隙磁场分布。主要区别在于定子绕组结构,传统的BLDCM通常采用三相绕组星形联结,而CWBLDCM采用多相绕组环形联结。因此,相应的换向电路和换向方法有很大的不同。
在一个电气周期内,每相绕组换向两次,因此m相CWBLDCM在每个电气周期内需换向2m次。2极9相CWBLDC电机换向过程(开关导通模式的切换过程),开关导通序列和模式见表1,9相CWBLDCM有18种开关导通模式,每个开关在一个电周期内只打开和关闭一次。
表1 2极9相CWBLDC开关导通序列和模式
Tab.l Sequence and mode of the 2-pole 9-phase CWBLDCM switching conduction

序列: …→模式1→模式2→…→模式18→模式1→模式2→… 在一个电周期内开关的导通模式 123456789101112131415161718 H1L1L1H1 H2H2L2L2 H3H3L3L3 H4H4L4L4 H5H5L5L5 L6L6H6H6 L7L7H7H7 L8L8H8H8 L9L9H9H9
下面以模式1切换到模式2为例,介绍HCM工作原理,它可包括自然换向和强迫换向这两个阶段,如图3所示,图的右半部分显示的是第1相绕组反电动势e1和相电流i1的实时变化。β为换向提前导通角,代表各开关在其左侧绕组反电动势过零点前提前导通的电角度。γ为换向提前关断角,代表各开关在其右侧绕组反电动势过零点前提前关断的电角度。这两者是HCM的控制参数,分别对应自然换向和强迫换向的起始时刻,自然换向阶段在前,强迫换向阶段在后,因而需满足条件β≥γ。
自然换向阶段:开关H2在第1相绕组反电动势由正到负过零点前β电角度导通,此时进入自然换向阶段,如图3b所示。此时,H1和H2均为导通状态,第1相绕组短路,绕组电流在自身正向反电动势的驱动下开始变小直至反向增大。但随着换向过程继续进行,反电动势也逐渐减弱,负载较大时换向能力可能不足。
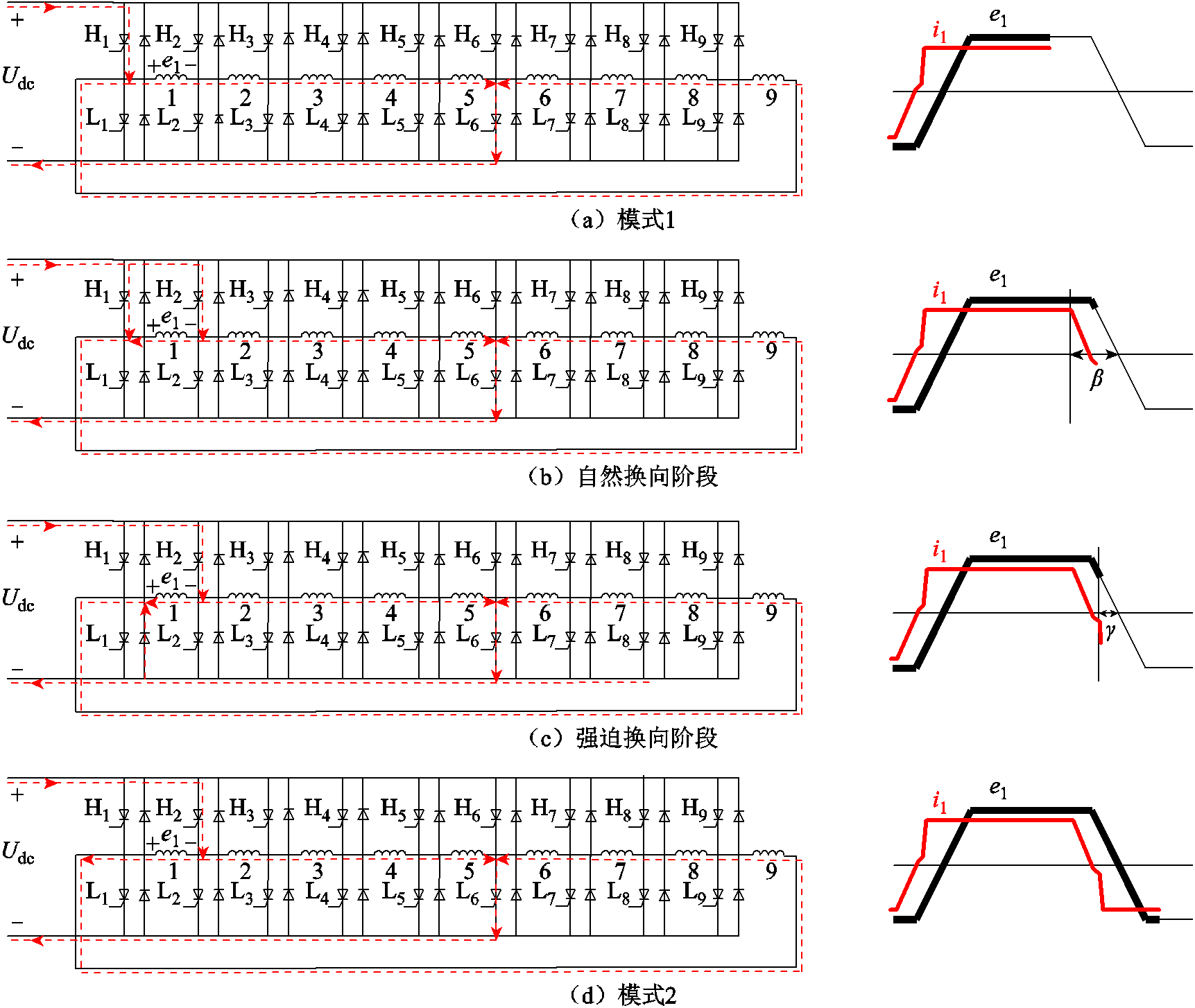
图3 模式1到模式2的混合换向过程
Fig.3 Hybrid process from mode 1 to mode 2
强迫换向阶段:开关H1在第1相反电动势过零点前γ电角度关断。若H1关断前,经过它的电流不为零,则与L1反向并联的二极管会在关断瞬间导通续流,如图3c所示,这时绕组相当于直接接在直流母线正负端,在母线电压作用下迅速反向增大,直到L1的反并联二极管续流结束,系统便自动切换到模式2,HCM过程结束。
由于母线电压远大于绕组反电动势,所以强迫换向阶段的换向能力远强于自然换向阶段,但也会导致相电流波形变化更剧烈,高频谐波含量增多,转矩脉动变大。调整β和γ可以改变反电动势和母线电压在换向过程中作用的比例,对相电流波形有很大影响。若CWBLDCM在同负载下换向,不同的(β, γ)控制可能导致出现以下四种情况:
(1)当β=γ时,换向过程仅包含强迫换向阶段,这种情况被称为强迫换向(Force Commutation, FC)状态,此时开关的关断电流远大于零。
(2)当β>γ且Hj(或Lj)关断时通过它的电流未降到零时,其对侧的反并联二极管将发生续流。这时,换向过程包含两个阶段,称为混合换向(Hybrid Commutation, HC)状态。这种状态下,开关关断电流大于零,但通常小于FC状态时的关断电流。
(3)当β>γ且Hj(或Lj)关断时通过它的电流已降为零,于是其对侧的反并联二极管就不会发生续流。在这种情况下,换向过程只依赖反电动势,称为负载换向(Load Commutation, LC)状态。在此状态下,开关关断电流为零。
(4)当电机在LC状态下,且换向控制参数(β, γ)中β最小时,称之为临界负载换向(Critical Load Commutation, CLC)状态。在这种情况下,通过Hj(或Lj)的电流正好在关断时刻降到零。
对于在固定负载转矩下运行的CWBLDCM,有无数组不同的(β, γ)使其处于FC、HC或LC状态,但只有一组(β, γ)使其处于CLC状态。
本文通过一台额定功率为10kW,16极50槽25相CWBLDCM样机来验证HCM可行性,如图4所示,当电机转速为300r/min时,反电动势幅值为27V,母线电压约80V。为节省计算时间,本文采用基于CWBLDCM动态模型的方法,而不是场路联合仿真的方法来模拟混合换向过程。文献[13, 17]中已经描述了动态建模的细节,因此这里仅对其进行简要介绍。CWBLDCM动态模型如图5所示,包括电机模型、换向电路模型和开关信号发生器。利用有限元法得到了动态建模所需的空载反电动势参数和电感矩阵,β和γ是开关信号发生器的输入参数。

图4 CWBLDCM试验平台
Fig.4 Experimental platform of CWBLDCM
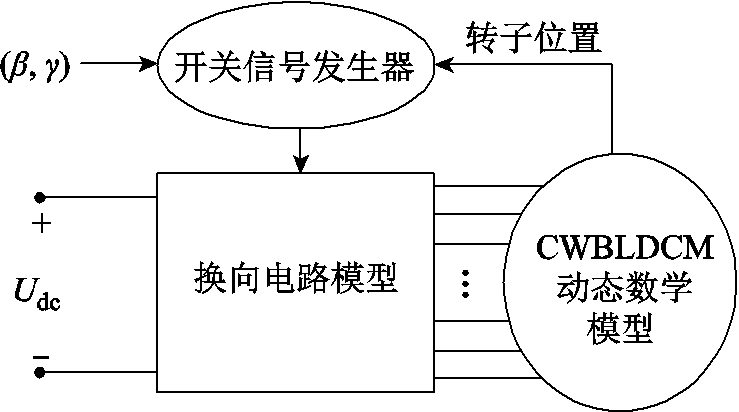
图5 CWBLDCM电机动态模型
Fig.5 Dynamic model of CWBLDCM
当β=γ时,容易直接判断电机处于FC状态,但难以根据β与γ之间的简单函数关系判断电机是处于LC状态还是HC状态。因此,需要通过动态模型在不同的(β, γ)控制下对开关电流波形进行仿真以确定电机的换向状态。
为研究(β, γ)与换向状态之间的关系,本文对电机转速300r/min、负载转矩50N×m的工况进行仿真。在此工况下,利用动态模型计算在β∈(0°,18°),γ∈(0°, 18°)且β≥γ范围内的开关电流波形。根据仿真结果,得到开关关断电流的等值线如图6所示,当Ic=0,电机工作在LC状态,在LC状态下,最小的β是12°;当(β, γ)=(12°, 5°)时,电机工作在CLC状态;当β>γ且Ic≠0时,电机工作在HC状态。
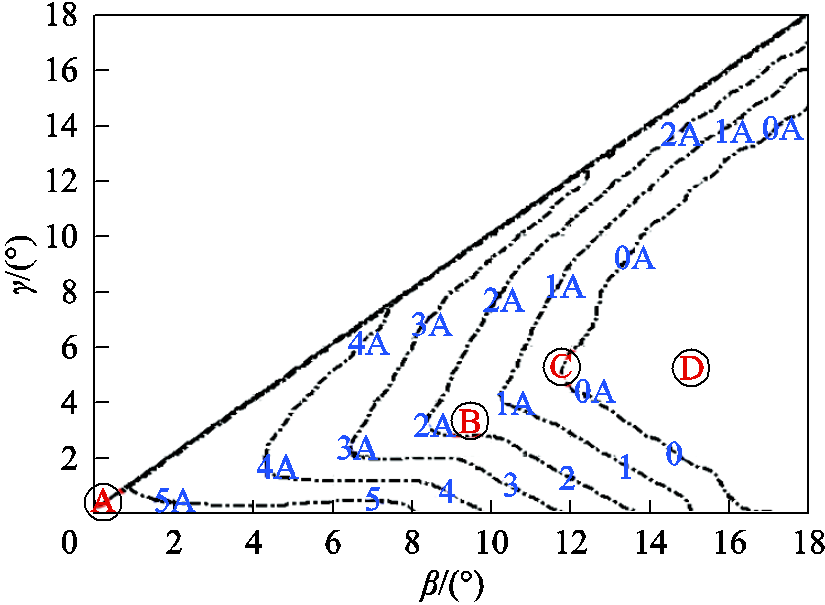
图6 开关关断电流等值线图
Fig.6 The contour map of the switch turn-off current Ic
为了验证混合换向方法的可行性和动态模型的准确性,本文进行了实验验证。在实验中,保持电机转速为300r/min,输出电磁转矩为50N×m,混合换向的控制参数β和γ分别依次在控制程序中设为图6所示的 四个对应点,坐标分别为(0°, 0°)、(9°, 3°)、(12°, 5°)和(15°, 5°)。
四个对应点,坐标分别为(0°, 0°)、(9°, 3°)、(12°, 5°)和(15°, 5°)。
本实验采用两个Tektronix TCP0030电流探头分别测量电机第1相绕组相电流I1和相应的开关(H1和L1)电流,采用一个低压差分探头测量驱动电路MOSFET开关H1的驱动信号,以上三个信号通过4通道的Tekronnix MDO4054A示波器同时采集波形。实验与仿真的对比结果如图7所示,样机在上述四种控制参数下均能稳定运行,证明了混合换向方法的可行性,同时每种工况下的实验波形与仿真波形基本一致,也验证了动态模型的正确性。
根据图7可知,当β=0°且γ=0°时,关断电流为5.4A,电机处于FC状态;当β=9°且γ=3°时,关断电流为1.8A,电机处于HC状态;当β=12°且γ=5°时,在开关断开的瞬间,开关电流正好降到0A,电机处于CLC状态;当β=15°且γ=5°时,开关电流在关断前已降至0A,电机处于LC状态。
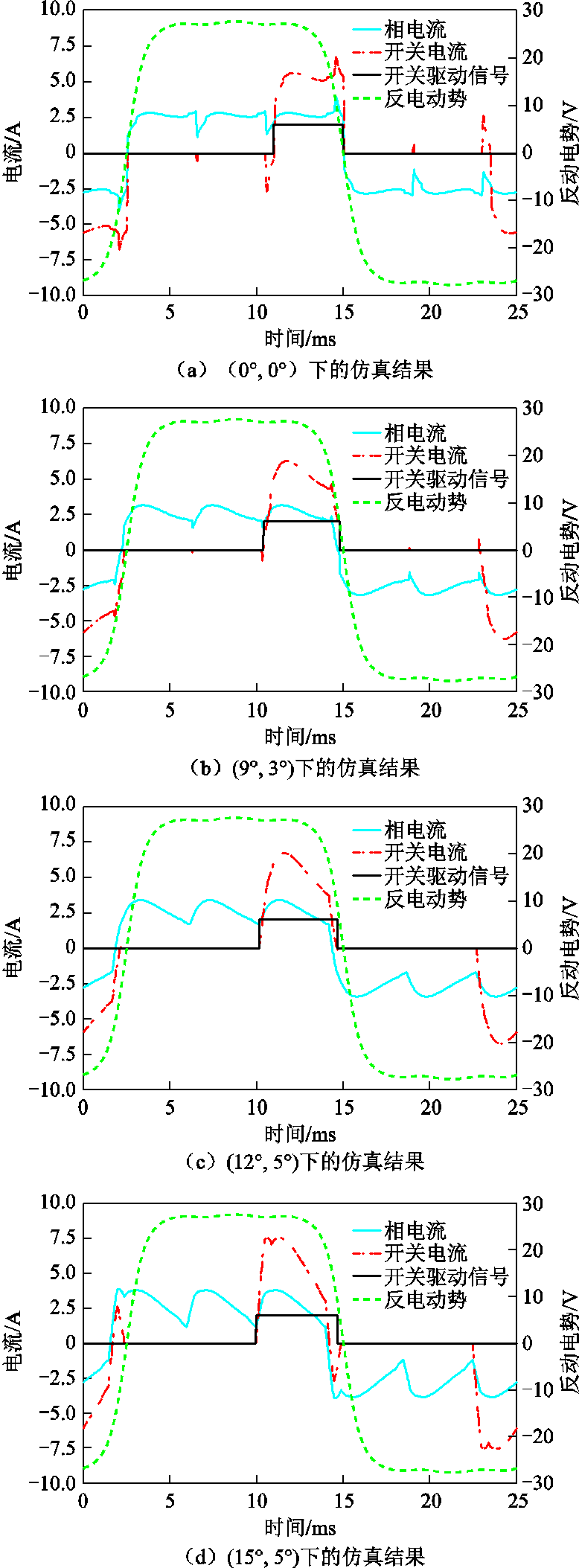

图7 四种换向状态下电流的仿真和实验波形
Fig.7 The simulation and experiment results of current waveforms in four commutation states
CWBLDCM的相电流波形随负载和换向参数(β, γ)的变化而变化,由于用有限元方法计算各种工况下的电磁转矩耗时较长,本文采用解析表达式方法来评价不同换向状态下的转矩性能。
从本质上讲,CWBLDCM除了绕组联结方式外,在电磁结构上与传统的BLDCM没有区别。因此,CWBLDCM在负载条件下的电磁转矩可以写成[9]
 (1)
(1)
式中,Tcog为齿槽转矩;Ω为转子的机械角速度;m为相数;ik为第k相绕组电流;ek为第k相绕组的空载反电动势。本文样机是一台分数槽永磁电机,转子经过一个齿距有8次齿槽转矩波动,理论上齿槽转矩很小[18]。经有限元仿真,其空载齿槽转矩峰峰值仅为0.025 N×m,因此忽略齿槽转矩,电磁转矩可表示为
 (2)
(2)
在动态模型中,将电机空载反电动势波形和A、B、C、D条件下的相电流波形分别代入式(2)中,得到转矩波形,如图8a所示。在有限元模型中,将励磁电流设定为动态模型模拟的相电流波形时,这四种情况下的转矩也可以用有限元法计算,如图8b所示。对比发现,两种不同方法得到的结果几乎相同,由此证明式(2)是评价CWBLDCM转矩性能的可靠方法。
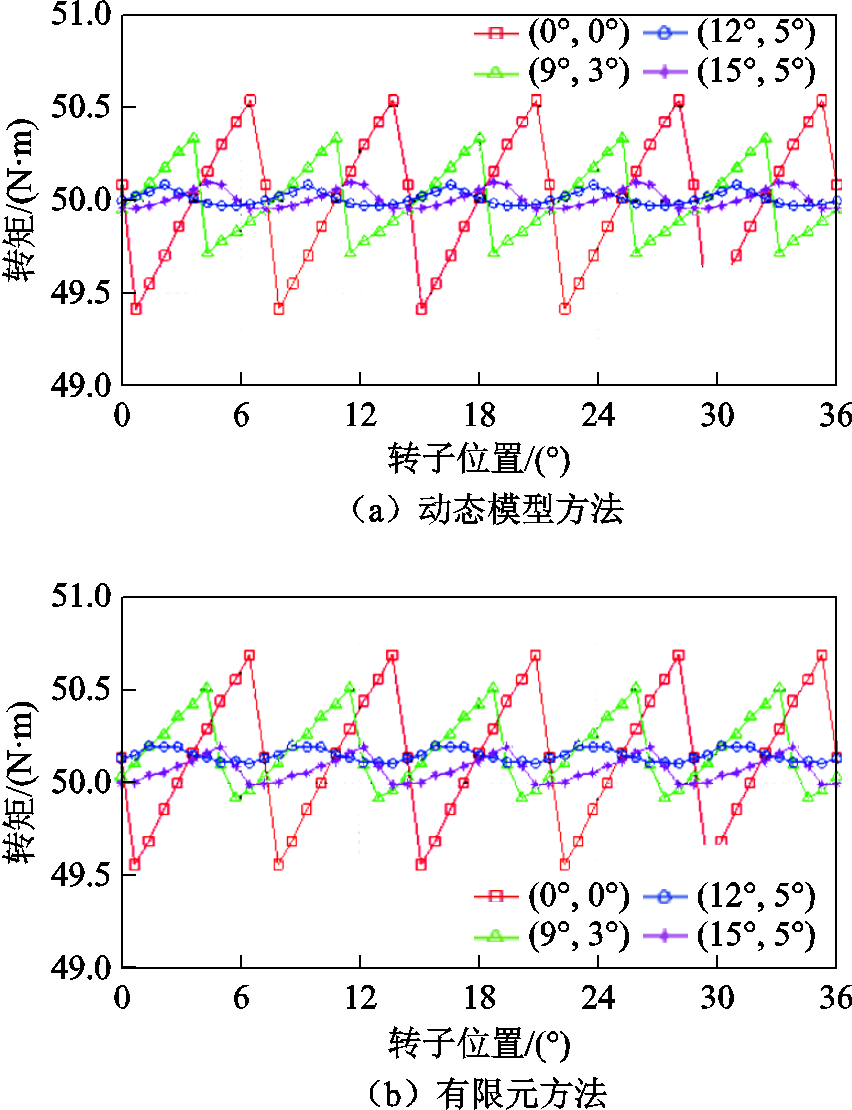
图8 动态模型和有限元模型计算的转矩波形
Fig.8 Torque waveforms calculated by dynamic model method and finite element method
从图8可以看出,转矩脉动周期为7.2°,其频率是机械频率的400倍,当电机转速为300r/min时,转矩脉动频率为2kHz,由于实验平台上基于应变片的传感器带宽较低,难以测量脉动波形[19-20]。根据式(2)的原理,本文提出了一种间接测量CWBLDCM转矩脉动的方法。首先,当电机转速稳定时,同时测量各相绕组的相电压和电流波形,然后根据式(3)计算负载条件下各相的反电动势,最后由式(2)可计算出转矩脉动。
 (3)
(3)
式中,uk为第k相绕组两端电压;lkj为第k相绕组和第j相绕组间的互感;rk为第k相绕组电阻。
通过这种间接测量,可以得到电机在两个机械周期内的转矩波形,如图9a所示。由于样机与负载电机之间连接为非理想状态,结果中含有机械频(5Hz)及其几倍频的低频谐波,在滤除这些非理想谐波后,转矩波形如图9b所示,与图8中的波形非常一致。
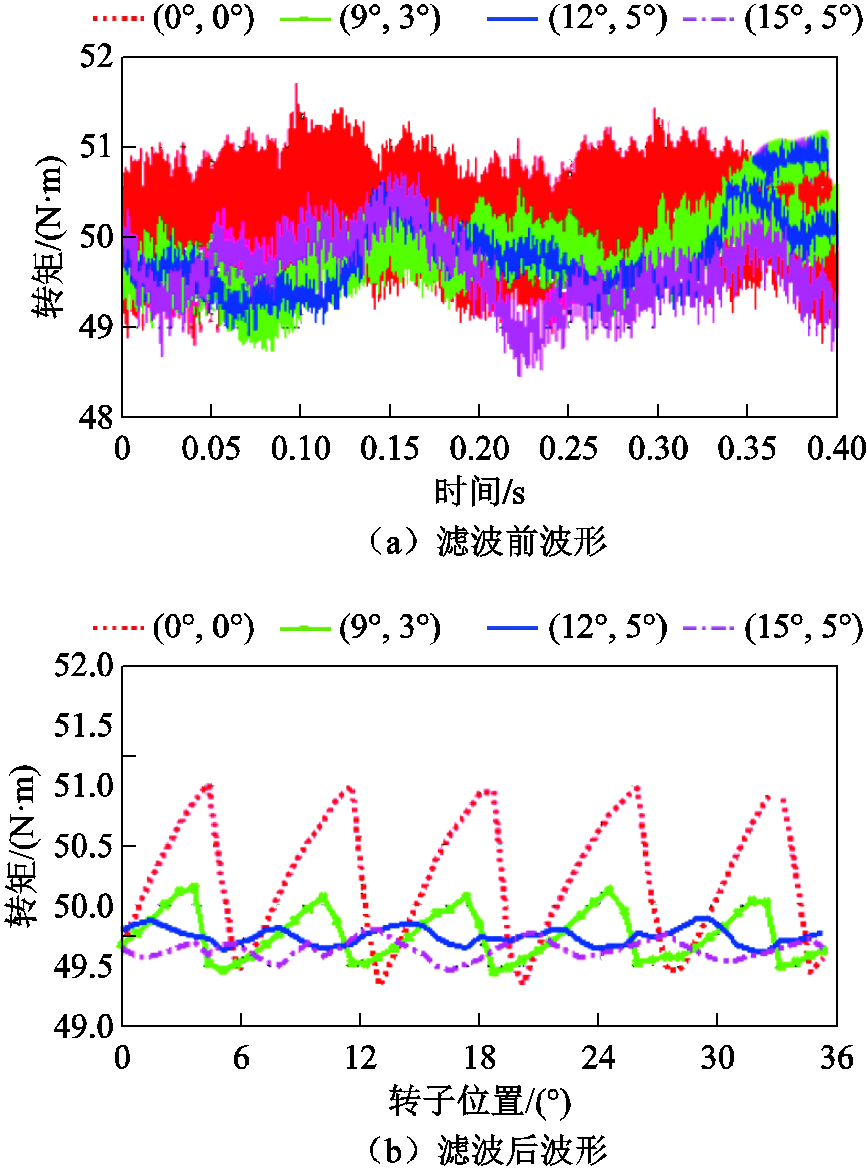
图9 间接测量法得到的转矩波形
Fig.9 Torque waveforms measured by the indirect experimental method
在本文中,转矩性能是指转矩密度和转矩脉动。转矩密度通过单位电流转矩来衡量。其计算为
 (4)
(4)
式中,Irms为相电流有效值;Tmean为平均转矩。由此可以得到,在A、B、C、D条件下的转矩密度Ti分别为0.764 N×m /A、0.756 N×m /A、0.735 N×m /A和0.675 N×m /A。
转矩脉动为
 (5)
(5)
式中,Tpp为转矩波形的峰-峰值。由此可以得到,在A、B、C、D条件下的转矩脉动分别为2.25%、1.05%、0.22%和0.30%。
根据上述计算结果,表2给出了四种换向状态下的转矩性能比较。无论是转矩密度还是转矩脉动,普通LC状态的性能都不如CLC状态。虽然FC状态下的转矩密度略高于HC和CLC状态下的转矩密度,但是FC状态下的转矩脉动要比其他两种状态下的转矩脉动大得多。综上所述,CLC状态和HC状态可以获得比其他两种状态更均衡的转矩性能。
表2 不同换向方式下的转矩性能比较
Tab.2 Comparison of torque performance in different commutation states

转矩性能转矩密度转矩脉动 优↓差FCCLC HCLC CLCHC LCFC
当样机采用HCM进行换向时,动态模型可以模拟任意换向控制参数(β, γ)下的开关电流和相电流波形,因此通过扫描(β, γ)并通过式(2)计算转矩波形,可参照图6画出原理样机在任意负载下的关断电流、转矩密度和转矩脉动的等值线图,然后从开关管关断电流等值线图中,可知扫描范围内任意(β, γ)对应开关管的换向状态。采用这种方法,可以得到原理样机在10N×m到100N×m的负载运行时,在FC、HC和CLC状态下的性能仿真结果,如图10a、图10b和图10c所示,相应的控制参数(β, γ)见表3。当用HCM使CWBLDCM在CLC状态下运行时,换向过程与LCM相同,换向提前角最小。因此,用LCM表示的电机性能可以用HCM表示的CLC状态来表示。
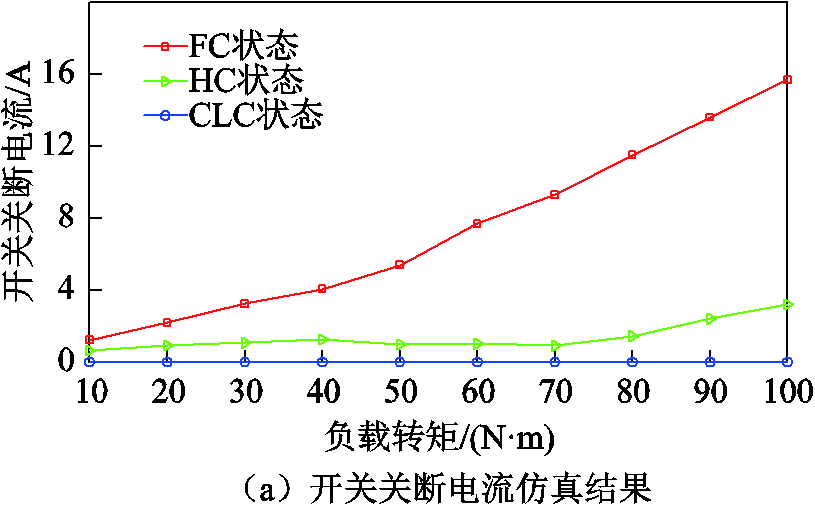
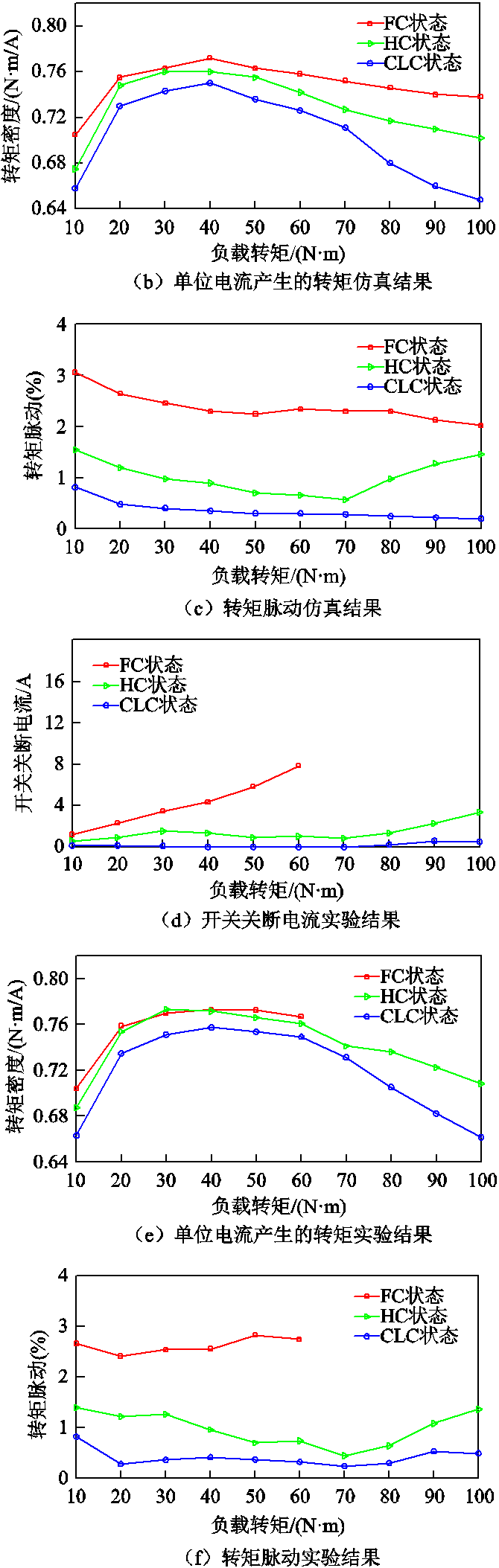
图10 不同负载条件下的电机性能
Fig.10 Performance under different load conditions
为了验证仿真结果的可靠性,进行了相应的实验,结果如图10d、图10e、图10f所示,其中转矩脉动采用第3节中提到的间接法测量,通过比较,仿真结果与实验结果基本一致,验证了上述分析方法的有效性。实验中,当电机在FC状态下运行,负载大于60N×m时,强制关断产生的dv/dt和di/dt过大,会对控制电路产生较大的电磁干扰,可能导致突然关断故障,即CWBLDC电动机在FC状态下运行存在破坏性风险。因此,在FC状态下负载转矩大于60N×m的实验尚未进行。
表3 不同负载条件下的(β, γ)
Tab.3 (β, γ) in different load conditions

负载/(N×m)FCHCCLC选择 10(0°,0°)(3°,0°)(4.5°,0°)CLC 20(0°,0°)(5°,0°)(6.5°,2°)CLC 30(0°,0°)(7°,0°)(8.5°,2°)CLC 40(0°,0°)(9°,2°)(10°,3°)CLC 50(0°,0°)(11°,4°)(12°,5°)CLC 60(0°,0°)(13°,6°)(14°,7°)CLC 70(0°,0°)(16°,9°)(17°,10°)CLC 80(0°,0°)(18°,11°)(21°,12°)HC 90(0°,0°)(21°,12°)(25°,8°)HC 100(0°,0°)(23°,10°)(28°,9°)HC
当电机处于FC状态时,开关关断电流随着负载的增加而迅速上升,从而使开关损耗迅速增加。虽然转矩密度高,但转矩脉动大。当电机处于CLC状态时,开关关断电流为零,开关损耗很低。在这种情况下,转矩脉动较小,但转矩密度低于FC状态。当电机处于HC状态时,开关关断电流、转矩密度和转矩脉动均在FC状态和CLC状态之间。
样机的额定输出转矩约为100N×m,在中、高负载(40~100N×m)条件下,预期目标为:转矩密度≥0.7N×m/A,转矩脉动≤1.5%。由于LCM(或HCM的CLC状态)的换向能力受反电动势和绕组电感的限制,所需的提前换向角β将随着负载的增加而增加[14],这将导致转矩密度的降低。如图10b和图10c所示,电机在CLC状态下工作,负载小于70N×m时,转矩脉动很小,转矩密度仍能满足要求。但当负载继续增大而电机保持CLC状态时,其转矩密度迅速下降,铜损耗迅速增加。此时,通过使用适当的控制参数(β, γ),将换向状态从CLC状态变为HC状态能有效地提高转矩密度。这是因为CLC状态仅利用反电动势驱动换向,而HC状态同时利用直流母线电压和反电动势驱动绕组电流换向,换向能力更强。而在FC状态下虽然转矩密度更高,但开关管的关断电流和转矩脉动较大,电磁兼容性也较差,在大负载工况尤为严重,不推荐使用。因此,从性能平衡的角度来看,HC状态更适合在重载下工作的CWBLDCM。
综上所述,本文提出CWBLDCM的控制策略:①在中、低负载下保持电动机处于CLC状态;②当负载较高导致CLC状态下电机转矩密度达不到预期时,调整换向参数使电机进入适当的HC状态。该控制策略简单、灵活、实用。例如,舰船在中低速巡航时,推进电机的振动噪声性能是最重要的,其次是效率,使用CLC最佳,而当它高速航行时,情况恰恰相反,这时使用HC最佳。
本文提出了一种CWBLDCM的混合换向方法。通过调节控制参数β和γ,电机可能进入四种典型的换向状态。当电机处于FC状态时,转矩密度最大,开关关断电流和转矩脉动最大;当电机处于LC状态时,转矩脉动最小,关断电流为零,但转矩密度相对较低。CLC状态是LC状态的一个特例,当电机在中、低负载条件下,工作于CLC状态时,其转矩密度和转矩脉动性能可以达到很好的平衡。但是,随着负载的增加,CLC状态可能使电机的转矩密度降低,在这种情况下,HC状态可以在其他性能降低较小的情况下提高电机的转矩密度,是一种较优的控制方式。
参考文献
[1] Reddy P B, El-Refaie A M, Huh K K, et al. Comparison of interior and surface PM machines equipped with fractional-slot concentrated windings for hybrid traction applications[J]. IEEE Transactions on Energy Conversion, 2012, 27(3): 593-602.
[2] Cho H, Jang S. A design approach to reduce rotor losses in high-speed permanent magnet machine for turbo-compressor[C]//2006 IEEE International Magnetics Conference (INTERMAG), San Diego, CA, USA, 2006: 209.
[3] Aliabad A D, Ghoroghchian F. Design and analysis of a two-speed line start synchronous motor: scheme one[J]. IEEE Transactions on Energy Conversion, 2016, 31(1): 366-372.
[4] 夏长亮, 方红伟. 永磁无刷直流电机及其控制[J]. 电工技术学报, 2012, 27(3): 25-34.
Xia Changliang, Fang Hongwei. Permanent-magnet brushless DC motor and its control[J]. Transactions of China Electrotechnical Society, 2012, 27(3): 25-34.
[5] Thongam J S, Tarbouchi M, Okou A F, et al. Trends in naval ship propulsion drive motor technology[C]//2013 IEEE Electrical Power & Energy Conference, Halifax, NS, Canada, 2013: 1-5.
[6] Qiao Mingzhong, Jiang Chao, Zhu Yongxin, et al. Research on design method and electromagnetic vibration of six-phase fractional-slot concentrated-winding PM motor suitable for ship propulsion[J]. IEEE Access, 2016, 4: 8535-8543.
[7] Bianchi N, Bolognani S, Ružojčić B. Design of a 1000HP permanent magnet synchronous motor for ship propulsion[C]//13th European Conference on Power Electronics and Applications, Barcelona, Spain, 2009: 1-8.
[8] 谭建成. 永磁无刷直流电机技术[M]. 北京: 机械工业出版社, 2011.
[9] Carlson R, Lajoie-Mazenc M, Fagundes J C D S. Analysis of torque ripple due to phase commutation in brushless DC machines[J]. IEEE Transactions on Industry Applications, 1992, 28(3): 632-638.
[10] Fang Jiancheng, Li Haitao, Han Bangcheng. Torque ripple reduction in BLDC torque motor with nonideal back EMF[J]. IEEE Transactions on Power Electronics, 2012, 27(11): 4630-4637.
[11] Shi Tingna, Guo Yuntao, Song Peng, et al. A new approach of minimizing commutation torque ripple for brushless DC motor based on DC-DC converter[J]. IEEE Transactions on Industrial Electronics, 2010, 57(10): 3483-3490.
[12] Wang Dong, Lin Huangda, Cheng Siwei, et al. A novel circular winding brushless DC(CWBLDC) machine with low torque ripple[C]//IECON 2015 - 41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 2015: 1585-1591.
[13] Zhang Qinghu, Cheng Siwei, Wang Dong, et al. Multiobjective design optimization of high-power circular winding brushless DC motor[J]. IEEE Transactions on Industrial Electronics, 2018, 65(2): 1740-1750.
[14] 贾喆武, 张庆湖, 王东. 环形绕组无刷直流电机的四象限运行分析[J]. 电工技术学报, 2020, 35(18): 3821-3829.
Jia Zhewu, Zhang Qinghu, Wang Dong. Analysis on 4-quadrant operation of circular winding brushless DC motor[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3821-3829.
[15] Lin Huangda, Cheng Siwei, Wang Dong, et al. Load commutation of the circular winding brushless DC machine(CWBLDC)[C]//IECON 2015 - 41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 2015: 2741-2746.
[16] 林黄达, 王东, 程思为, 等. 环形绕组无刷直流电机负载换向的解析模型[J]. 电工技术学报, 2017, 32(9): 40-47.
Lin Huangda, Wang Dong, Cheng Siwei, et al. Analytical model of load commutation of the circular winding brushless DC machine[J]. Transactions of China Electrotechnical Society, 2017, 32(9): 40-47.
[17] Cheng Siwei, Zhang Qinghu, Jia Zhewu, et al. Dynamic modeling of the circular winding brushless DC (CWBLDC) machine[C]//Proceedings of 8th International Power Electronics Motion Control Conference, 2016: 1136-1141.
[18] 王秀和. 永磁电机[M]. 北京: 中国电力出版社, 2007.
[19] Beccue P, Neely J, Pekarek S, et al. Measurement and control of torque ripple-induced frame torsional vibration in a surface mount permanent magnet machine[J]. IEEE Transactions on Power Electronics, 2005, 20(1): 182-191.
[20] Heins G, Thiele M, Brown T. Accurate torque ripple measurement for PMSM[J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60(12): 3868-3874.
Hybrid Commutation Method of Circular Winding Brushless DC Motor
Abstract Circular winding brushless DC motor (CWBLDCM) is a novel non-sinusoidal multiphase permanent-magnet one whose torque performance is closely related to the commutation of current. This paper proposes a hybrid commutation method, in which both the back-EMF and the DC-bus voltage are exploited to improve the torque performance. With the variation of two commutation parameters, β and γ, the hybrid commutation process can be classified into four typical states. Firstly, all commutation states are analyzed, simulated, and then verified by experiment. Then, the torque performance under different commutation states is compared. Finally, according to the comparison result, an optimized control strategy is recommended for the CWBLDC motor.
keywords:Brushless DC motor, commutation method, torque density, torque ripple
DOI:10.19595/j.cnki.1000-6753.tces.211159
中图分类号:TM351
国家自然科学基金重大项目(51690181)和国家自然科学基金杰青项目(51825703)资助。
收稿日期 2021-07-29
改稿日期 2021-09-10
张庆湖 男,1990年生,博士,助理研究员,研究方向为永磁电机设计与控制技术。E-mail:roywade90@126.com(通信作者)
贾喆武 男,1990年生,博士,研究方向为永磁电机控制技术。E-mail:jiazhewu2009@hotmail.com
(编辑 郭丽军)