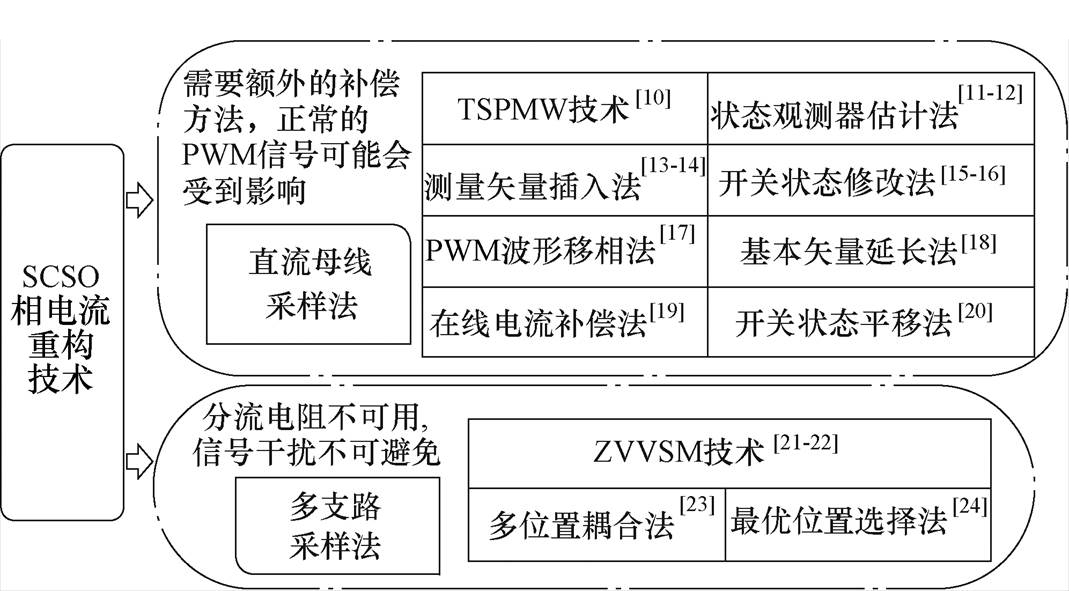
图1 SCSO相电流重构技术分类
Fig.1 Classification of SCSO phase current reconstruction
摘要 针对基于传统空间矢量脉宽调制方法的单电流传感器相电流重构存在不可观测区域,且无法实现零点漂移校正问题,提出一种误差自校正混合脉宽调制方法,通过在不可观测区域各载波周期插入两个互补有效电压空间矢量代替零电压矢量,为电流传感器提供可靠的采样窗口,消除了电流不可观测区域。同时,通过对互补有效电压矢量进行动态电流双采样,实现电流零点漂移量的自检测和自校正。实验工况下所提方法重构相电流误差小于3.57%,相电流总谐波畸变率低于4.02%,可为控制系统提供可靠的重构相电流。
关键词:直流母线 相电流重构 误差自校正 空间矢量脉宽调制 误差自校正混合脉宽调制
在高性能交流电驱动系统中,实现对三相电压源型逆变器(Voltage Source Inverter, VSI)负载电流的实时控制至关重要[1-6]。通常,将分流器或霍尔传感器等电流传感器安装于VSI交流输出侧来采集相电流信息,以实现闭环控制;同时也可以安装于直流母线侧,以实现过载保护和直流短路保护[7]。然而,多个电流传感器既增加系统成本,又因传感器间的不一致性影响电驱动系统的控制性能[8-9]。单电流传感器操作(Single Current Sensor Operation, SCSO)相电流重构技术通过对直流母线或特定桥臂瞬时电流的分时刻采集,并将其映射至不同的相电流,实现了相电流的单传感器采集,降低了系统成本,同时也消除了多传感器不一致性对系统性能的影响,是电驱动控制领域的研究热点。SCSO技术的主要难点在于:①在扇区边界和低调制区域,由于有效电压矢量作用时间过短,受运算放大器压摆率、A/D转换时间等参数的限制,存在电流不可观测区域;②由于基准电压漂移、运算放大器零点漂移等因素造成的电流检测误差,会扩大至ABC三相,严重影响了控制系统性能。根据电流传感器的安装位置不同,SCSO技术可分为直流母线采样法和多支路采样法两大类。
针对直流母线相电流重构方法,文献[10]提出一种三态脉宽调制(Three-State Pulse Width Modu- lation, TSPWM)方法,使用3个相邻的开关状态构成参考电压,一定程度上缩小了不可观测区域,同时减小了共模电压。为了提高不可观测区域相电流重构的精度,文献[11]采用了电压矢量修正和伴随系统参数识别的预估状态观测器两种方法。文献[12]中重构相电流状态可以通过正弦曲线拟合观测器进行估计,整个过程中不引入额外的负载参数。然而,基于空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)的重构方法增加了动态电流响应噪声含量,减小了线性调制区域。文献[13]提出基于测量矢量插入法(Measurement Vector Insertion Method, MVIM)的单电流传感器方法,通过在脉冲宽度调制(Pulse Width Modulation, PWM)载波末尾插入有效矢量来获得短暂的测量窗口,并由电流调节器引入虚拟有源电阻反馈来消除干扰[14],实现了不可观测区域内的相电流重构。基于修改逆变器开关状态,文献[15]在过调制区域完成相电流重构,同时分析实测相电流与重构相电流之间重构误差产生的原因并提出相应解决方案[16]。利用PWM波形移相法,可增加电流观测窗口时长,同时降低逆变器输入电流中的谐波含量,从而进一步减小其平均值的波动[17]。文献[18]提出了一种在低调制区域调节PWM波占空比的同时延长有效电压矢量持续时间的新方法。它通过延长有效电压矢量作用时间并插入其互补矢量来代替零矢量,从而满足最小电流观测窗口时长的要求。文献[19]提出了一种具有在线电流补偿功能的相电流重构方法,用空间电压矢量临界区域替代传统不可观测区域,避免了不可观测区域周期性出现问题,实现了无漂移三相电流控制。文献[20]通过平移基本空间电压矢量改变PWM波形,在未增加开关损耗基础上,完成在不可观测区域相电流重构,输出参考电压矢量幅值和相位不变,负载相电流引入谐波含量较小。
将三相VSI中多条支路(支路数为2及以上)穿过霍尔传感器,实现在零电压矢量作用时获取电流信息,称为多支路采样法[21-24]。文献[21]利用零电压矢量采样法(Zero Voltage Vector Sampling Method, ZVVSM),通过将VSI两条支路穿过同一个霍尔传感器,实现零电压矢量作用时间段电流采样,保证了在低调制区域完成相电流重构。在ZVVSM方法基础上,文献[22]提出一种直流漂移抑制方法,利用陷波滤波器估计采样电流中直流漂移分量,从而补偿霍尔传感器的直流漂移误差。文献[23]提出一种多位置耦合采样法,在不改变PWM信号的情况下,通过将低调制区域和扇区边界的电流重构死区移向空间矢量六边形轮廓,避免了开关次数的增加。文献[24]利用单电流传感器耦合多条支路,减小了传统相电流重构方法不可观测区域,讨论了不同支路间的耦合情况,得出最优安装位置,降低了多支路采样法的实现难度。所提SCSO相电流重构技术分类总结如图1所示。
图1 SCSO相电流重构技术分类
Fig.1 Classification of SCSO phase current reconstruction
针对基于传统空间矢量脉宽调制方法的单电流传感器相电流重构存在不可观测区域,且无法实现零点漂移校正问题,本文提出了一种误差自校正混合脉宽调制(Error Self-correcting Mixed Pulse Width Modulation, ESM-PWM)方法,通过采用两个互补有效电压空间矢量代替不可观测区域各载波周期内的零矢量,并对互补有效电压矢量进行动态电流双采样,在消除电流不可观测区域的同时,实现了电流零点漂移量的自检测和自校正。最后在三相两电平逆变器交流电驱动控制系统上进行了实验验证。所提出的方法适用于交流电机驱动器、并网逆变器等由三相两电平桥式逆变电路作为主电路的电力电子装置,可在减少电流传感器使用数量的同时,提升电流检测精度。
传统SVPWM方法下,当参考电压矢量Vref位于扇区边界和低调制区域时,存在有效电压矢量作用时间过短而不满足电流采样所需时间的情况,基本电压矢量作用空间平面如图2所示,这些区域定义为不可观测区域。将完成采样所需最短时间称为最小电流观测窗口时长Tmin,即
 (1)
(1)
式中,tdead为死区时间;ton为导通时间;trise为电流突变时上升时间;tsr为电流稳定前的振荡时间;tA/D为A/D转化时间[25]。

图2 基本电压矢量作用空间平面
Fig.2 Basic voltage vector action space plan
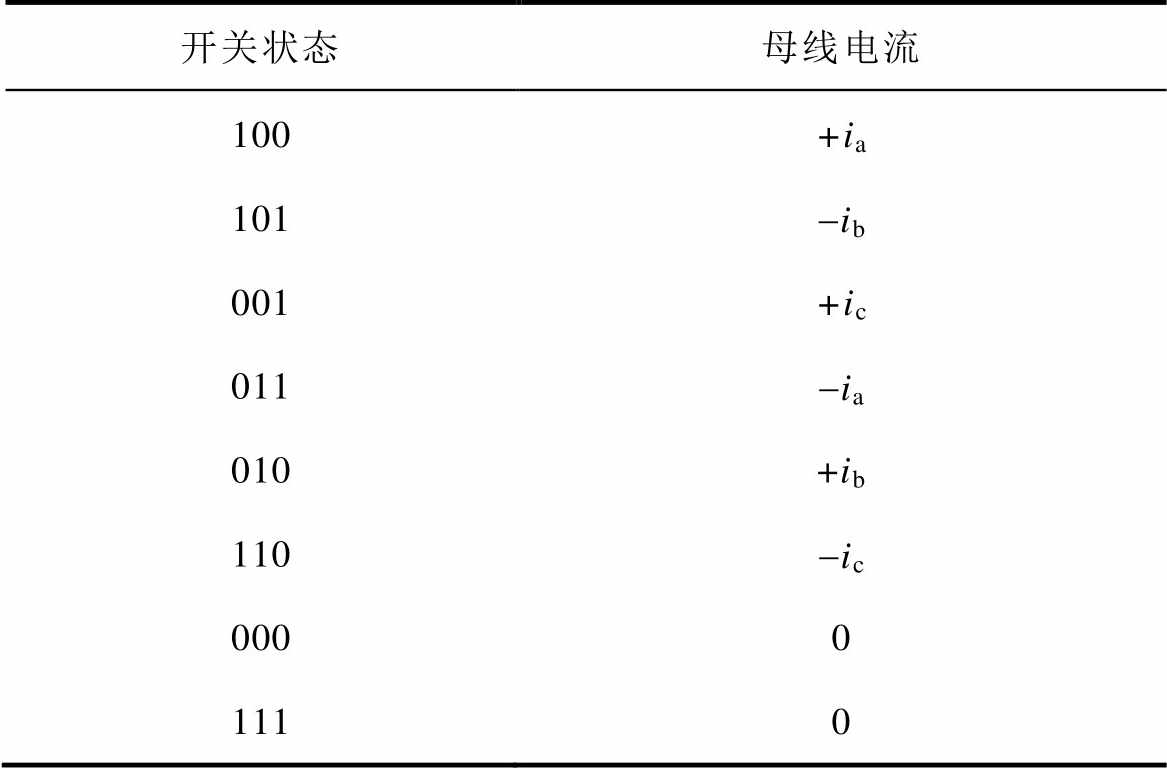
VSI驱动系统由6个绝缘栅双极型晶体管(Insu- lated Gate Bipolar Transistor, IGBT)组成,三相两电平电压源逆变器拓扑结构如图3所示。每相桥臂上下两个开关通断状态用Sp(p∈{a, b, c})表示。当Sp=1时,上开关管导通,下开关管关断;反之,用Sp=0表示。如图2所示,Vi(Sa, Sb, Sc)表示电压空间矢量八种不同的开关组合状态,i∈{0, 1, 2, 3, 4, 5, 6, 7}。开关状态与母线电流关系见表1。
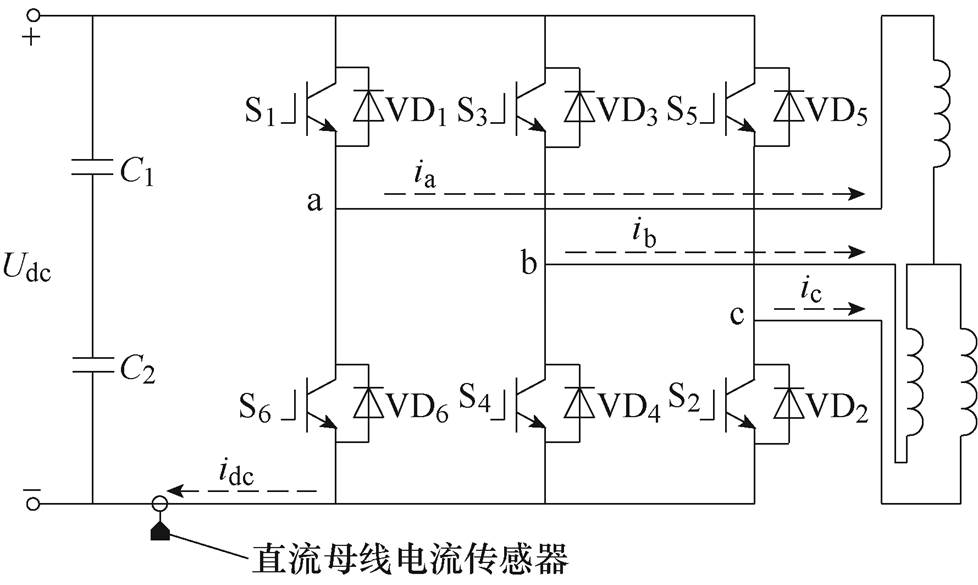
图3 三相两电平电压源逆变器拓扑结构
Fig.3 Three-phase two-level voltage source inverter
表1 开关状态与母线电流关系
Tab.1 DC-link current corresponding to voltage space vectors
开关状态母线电流 100+ia 101-ib 001+ic 011-ia 010+ib 110-ic 0000 1110
因此,在一个PWM载波周期内,有效电压矢量作用时间大于Tmin时,三相负载电流中的两相信息可以通过直流母线采样获得。第三相电流可以由基尔霍夫电流定律(Kirchhoff's Current Law, KCL)得到,即
 (2)
(2)
SVPWM直流母线电流采样如图4所示,在传统SVPWM方法下,当参考电压矢量Vref位于Ⅰ扇区时,开关序列(100)和(110)对应母线电流分别为ia和-ic,直流母线电流idc由两者合成。电流观测窗口时长Tspl1和Tspl2位于有效电压矢量作用时段,每个PWM周期采样两次电流,并由式(2)得出第三相电流。然而,当Vref在Ⅵ和Ⅰ扇区边界时,V2作用时间小于Tmin,无法保证-ic被准确采样,不能完整地实现相电流重构。
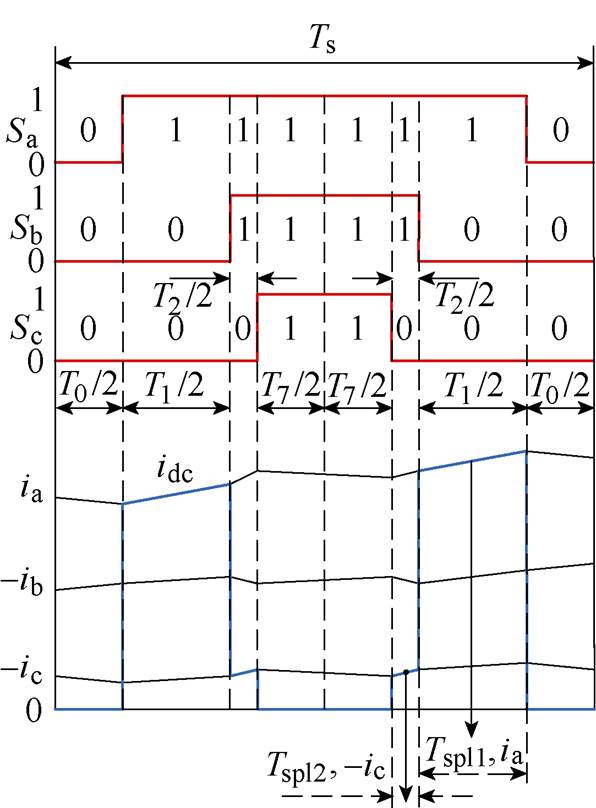
图4 SVPWM直流母线电流采样
Fig.4 DC-link current sampling under SVPWM
以Ⅰ扇区为例,ESM-PWM中参考电压矢量合成过程如图5所示。在一个PWM载波周期内,若Vref位于可观测区域,如图5a所示,作用时间为T1和T2的两个相邻电压矢量V1和V2用于合成Vref,剩余时间T0用零电压矢量(111)或(000)补充,且
 (3)
(3)
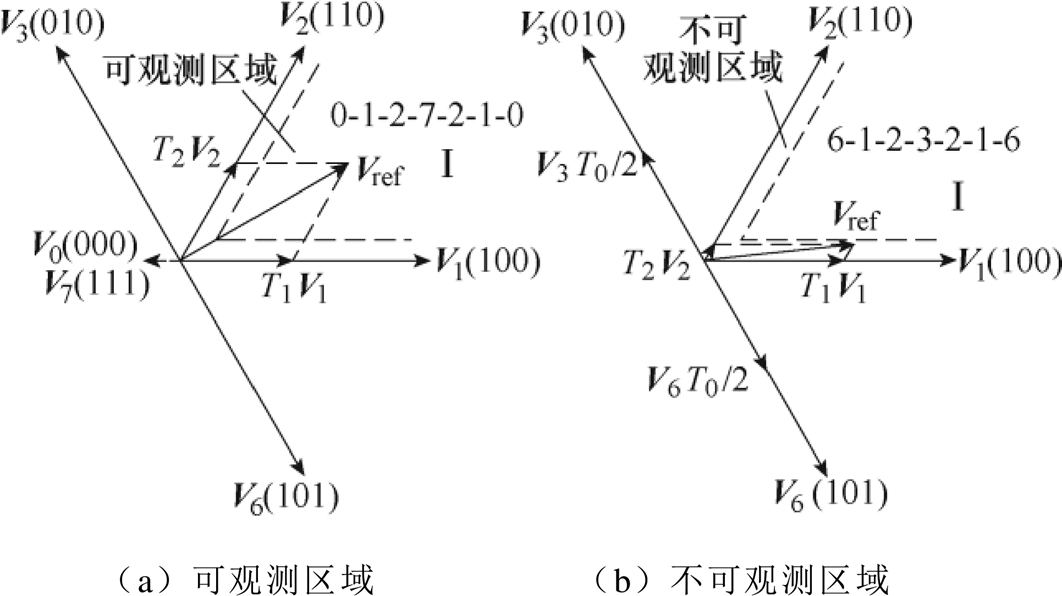
图5 参考电压矢量位于Ⅰ扇区时ESM-PWM原理
Fig.5 Principle of ESM-PWM with reference voltage vector location in different regions of sector Ⅰ
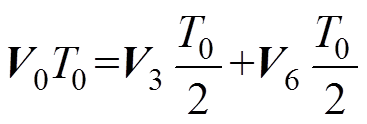
若Vref位于不可观测区域,图5a中,V0和V7将被互补有效电压矢量V3和V6代替,该过程如图5b所示。将T0平均分配到两个互补矢量,即T0/2= T3=T6,则零电压矢量为
 (4)
(4)
式中,V3和V6为两个互补电压矢量,可见插入互补有效电压矢量作用效果与零矢量相同。
根据伏秒平衡原则,图5b中,参考电压矢量Vref满足
 (5)
(5)
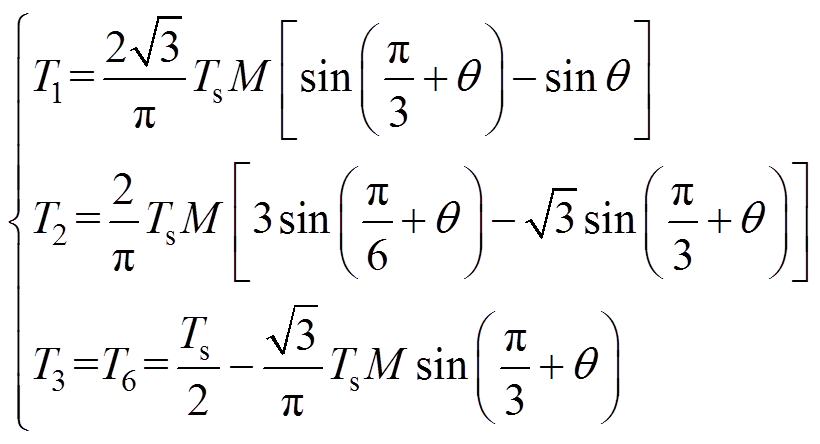
式中,q 为Vref的旋转角度;Vref为参考电压矢量的模值;Ts为PWM载波周期;Tk为电压空间矢量Vk(k=1, 2, 3, 6)作用时间。ESM-PWM各空间矢量的作用时间为
 (6)
(6)
其中
式中,Udc为直流母线电压;M为调制度,
 。当q 位于第Ⅱ~Ⅵ扇区时,需减去当前数值p/3的整数倍,即q-(N-1)p/3,N为扇区序号。
。当q 位于第Ⅱ~Ⅵ扇区时,需减去当前数值p/3的整数倍,即q-(N-1)p/3,N为扇区序号。
ESM-PWM具体实现流程框图以及对应PWM波形产生过程(以Ⅰ扇区为例)如图6所示,依靠系统时基计数器增减计数模式来产生PWM载波。ESM-PWM各扇区开关动作时间及动作寄存器赋值分别见表2和表3。三相电流ia、ib和ic经过Park和Clarke变换后,再转换为参考电压矢量Vref,根据其模值和相位确定当前所在扇区。当Vref位于可观测区域时,利用SVPWM来控制逆变器开关动作;当Vref位于不可观测区域时,根据SVPWM与ESM-PWM两种方法与PWM波占空比之间的关系,依据表2调整开关动作时间,表2中,TMqx和TSqx分别为EMS-PWM和SVWPM两种调制方法中PWMx的占空比,x=1, 2, 3。最后,根据表3对动作寄存器进行赋值,表3中,PRD_SET/CLEAR、CAD_SET/CLEAR和CAU_SET/CLEAR分别表示在计数器的值等于周期值、比较值A和比较值B时将PWM脉冲置高或低。
ESM-PWM方法直流母线单传感器相电流重构原理如图7所示。以Ⅰ扇区为例,图中上部分为PWM波形,下部分为相电流ia、ib和ic,叠加粗线为母线电流idc。如图7a所示,当Vref位于可观测区域内时,一个载波周期内Vref由有效电压矢量V1、V2和零矢量V0、V7构成。电流重构策略在有效电压矢量V1和V2作用产生的电流观测窗口Tspl1和Tspl2内分别对直流母线电流idc进行采样,得到ia和-ic,再根据KCL定律得到ib,即可得到一个载波周期内的三相电流ia、ib和ic。
如图7b所示,当Vref位于不可观测区域时 (Tspl1>Tmin, Tspl2<Tmin ,零电压矢量V7被作用时间为T0/2的有效矢量V6代替,对应产生电流观测窗口Tspl4用于采集相电流-ib,相反方向插入矢量V3产生的相电流ib(对应电流观测窗口为Tspl3)与之相加为零。电流观测窗口Tspl1、Tspl4保证了ia和-ib电流信息能够被准确采集。综上,通过插入互补有效电压矢量能够实现在整个电压空间矢量平面相电流重构。
,零电压矢量V7被作用时间为T0/2的有效矢量V6代替,对应产生电流观测窗口Tspl4用于采集相电流-ib,相反方向插入矢量V3产生的相电流ib(对应电流观测窗口为Tspl3)与之相加为零。电流观测窗口Tspl1、Tspl4保证了ia和-ib电流信息能够被准确采集。综上,通过插入互补有效电压矢量能够实现在整个电压空间矢量平面相电流重构。
重构相电流的精度对保证交流电驱动闭环控制系统稳定性至关重要。在实测控制系统中,直流母线电流零点漂移是产生重构误差的主要原因。

图6 ESM-PWM算法程序流程及PWM波形发生过程(Ⅰ扇区)
Fig.6 ESM-PWM algorithm program flow and analysis of the process of generating PWM waveforms (sector Ⅰ)
表2 ESM-PWM各扇区开关动作时间
Tab.2 ESM-PWM each sector switching action
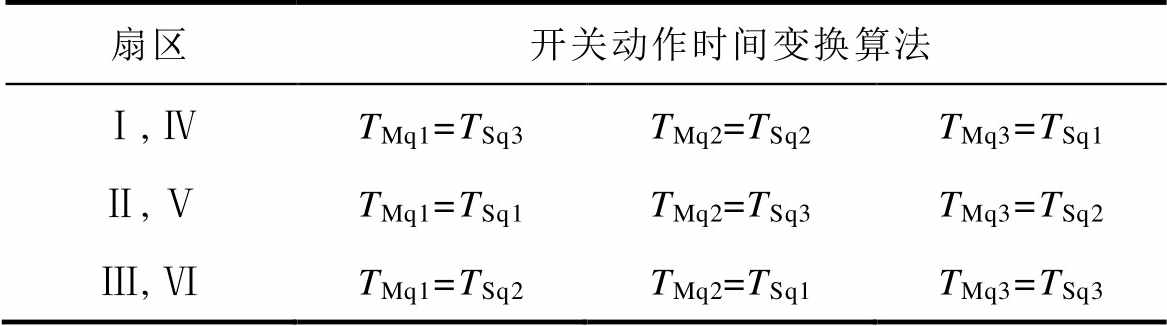
扇区开关动作时间变换算法 Ⅰ, ⅣTMq1=TSq3TMq2=TSq2TMq3=TSq1 Ⅱ, ⅤTMq1=TSq1TMq2=TSq3TMq3=TSq2 Ⅲ, ⅥTMq1=TSq2TMq2=TSq1TMq3=TSq3
表3 ESM-PWM各扇区动作寄存器赋值
Tab.3 ESM-PWM each sector action register assignment
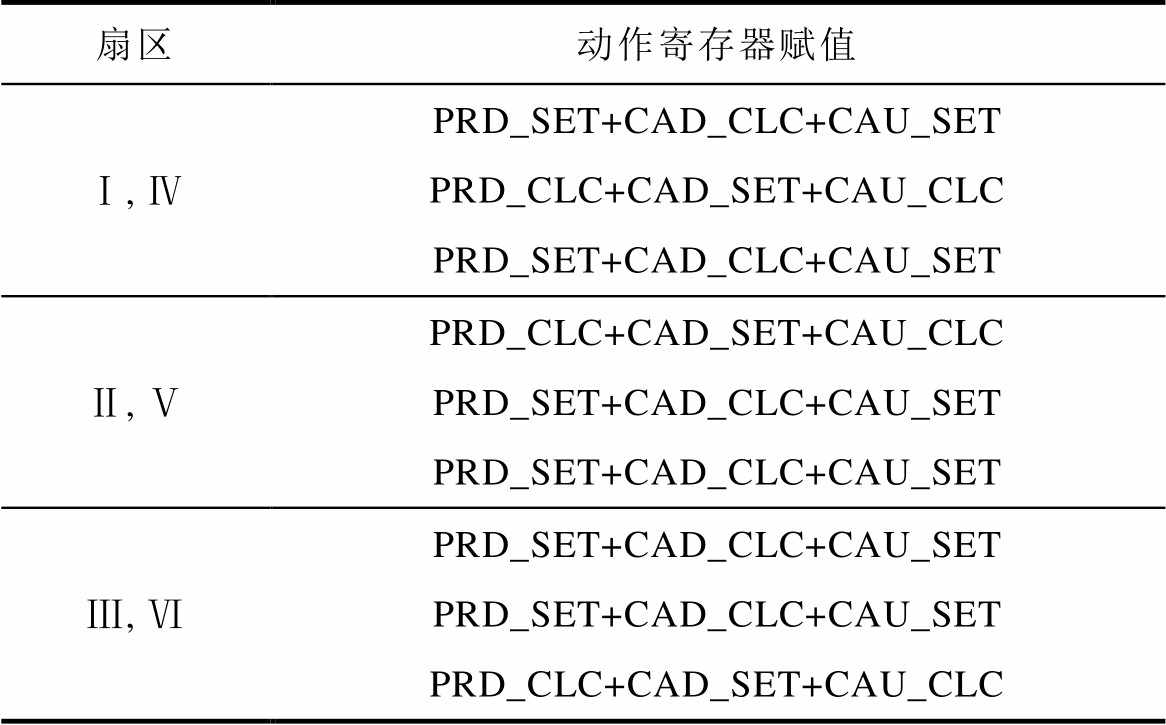
扇区动作寄存器赋值 Ⅰ, ⅣPRD_SET+CAD_CLC+CAU_SET PRD_CLC+CAD_SET+CAU_CLC PRD_SET+CAD_CLC+CAU_SET Ⅱ, ⅤPRD_CLC+CAD_SET+CAU_CLC PRD_SET+CAD_CLC+CAU_SET PRD_SET+CAD_CLC+CAU_SET Ⅲ, ⅥPRD_SET+CAD_CLC+CAU_SET PRD_SET+CAD_CLC+CAU_SET PRD_CLC+CAD_SET+CAU_CLC
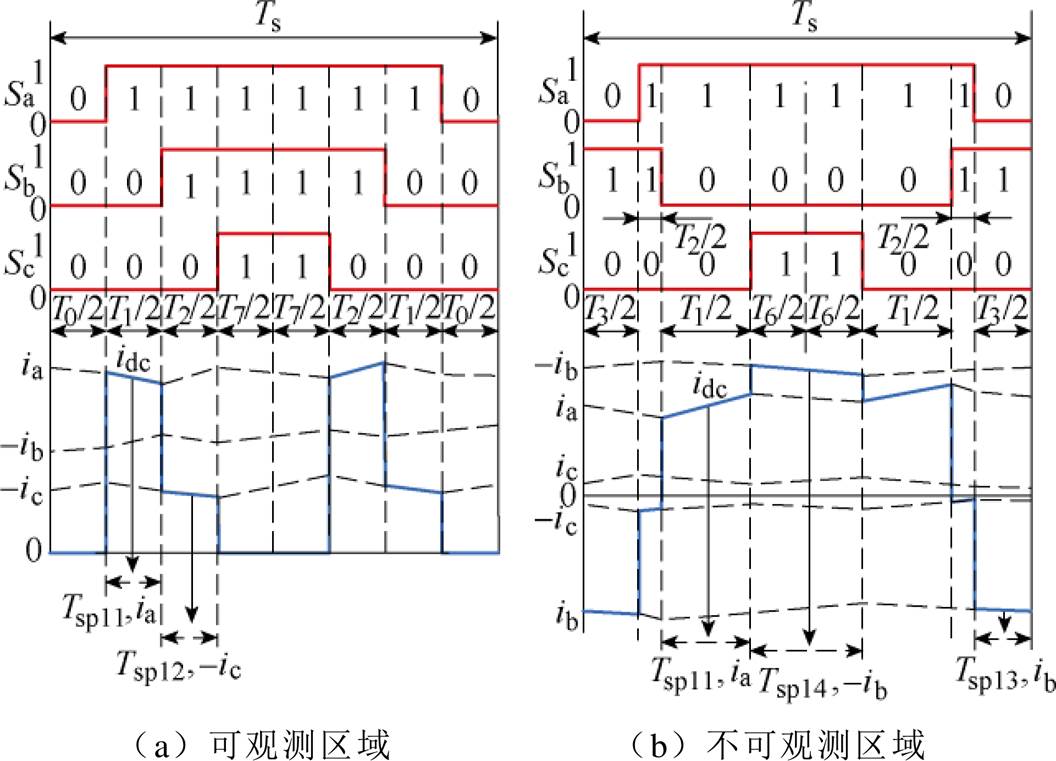
图7 ESM-PWM相电流重构原理
Fig.7 ESM-PWM phase current reconstruction principle
2.3.1 直流母线电流零点漂移分析
典型SCSO电流采样原理如图8所示,直流母线电流零点漂移主要包括电压基准漂移、霍尔电流传感器零点漂移和运算放大器零点漂移。当电流发生零点漂移后,会产生漂移量Di,使得重构相电流整体偏移实测相电流值。

图8 典型SCSO电流采样原理
Fig.8 Schematic diagram of typical SCSO current sampling
(1)霍尔电流传感器零点漂移:受温度和封装应力的影响,由传感器内部霍尔元件和运算放大器产生的漂移,直接造成了霍尔电流传感器输出信号的零点漂移。
(2)电压基准漂移:电压基准芯片的输出精度和稳定性是其最重要的性能,受初始精度、温度漂移、噪声等因素影响,电压基准漂移指电压基准芯片输出电压信号偏离理论值所产生的漂移量。
(3)运算放大器零点漂移:放大器内部元器件参数不一致性,环境温度变化等因素将会导致零点漂移现象,其中温度是漂移现象产生最主要的原因。
2.3.2 自校正策略
由表1可知,当两个互补电压矢量作用时,所对应直流母线电流大小相等、方向相反。因此采用ESM-PWM方法,在一个载波周期内,对插入的互补电压矢量进行采样,得到采样电流I1和I2。假设实际电流值为Ir,零点漂移导致的电流漂移量为Id,则
 (7)
(7)
实际电路中,由于零点漂移的存在 ,由式(9)可得
,由式(9)可得
 (8)
(8)
由此可计算出漂移量Id,从而得到校正后的电流Ic1和Ic2为
 (9)
(9)
ESM-PWM自校正策略通过在一个PWM载波周期内对插入互补电压矢量进行双重采样,实现了漂移量Id的检测,从而完成了重构电流自校正,其控制系统原理如图9所示。
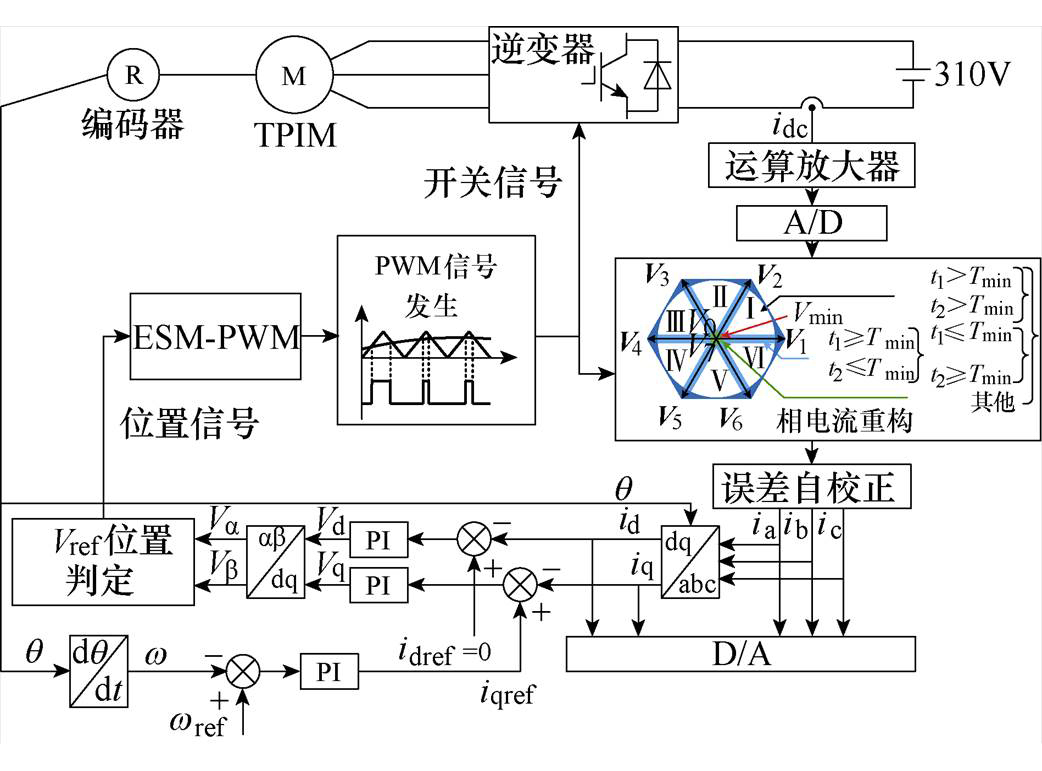
图9 ESM-PWM控制系统原理
Fig.9 Schematic of ESM-PWM control system
实验平台如图10所示,基于TMS320F28035型DSP的电驱动控制器实现误差自校正混合脉宽调制方法,载波频率为10kHz。相电流重构时,每个周期采样两次,采样频率为20kHz;当误差自校正使能后,每个周期需采样3次,此时采样频率为30kHz。三相感应电机MODVK48T17D200K作为控制系统的驱动电机。实验结果的采集和分析由电驱动分析仪MDA805A来完成。负载相电流波形用A150电流探头检测,实验所用三相感应电机具体参数见表4。

图10 实验平台
Fig.10 Experiment platform
表4 三相感应电动机参数
Tab.4 Parameters of three-phase induction motor

参 数数 值 额定功率P/W184 额定频率f/Hz60 额定电压U/V208~230/460 额定转速n/(r/min)1 721
实验中,Tmin=6.33ms(tdead=2.00ms,tA/D=3.33ms,ton+trise+tsr=1.00ms)。不可观测区域各扇区PWM波形及对应采样时刻如图11所示。在不可观测区域,插入互补非零矢量后,各扇区PWM波形中不再有零矢量,用以实现相电流重构的采样脉冲跟随PWM波形占空比的变化而变化,两次采样时刻均大于Tmin且对应母线电流平稳,保证了母线电流信息的准确获取。
电机起动阶段实测与重构相电流波形如图12所示,由于直流母线电流零点漂移现象,实测相电流为零时,重构相电流在漂移量附近波动,误差校正使能后,漂移量降低。正常运行时,校正前后实测与重构相电流波形如图13所示。电流零点漂移自校正前相电流曲线如图13b所示,各重构相电流之间存在漂移量差值。校正后的相电流曲线如图13c所示,漂移量差值为零,重构效果良好。
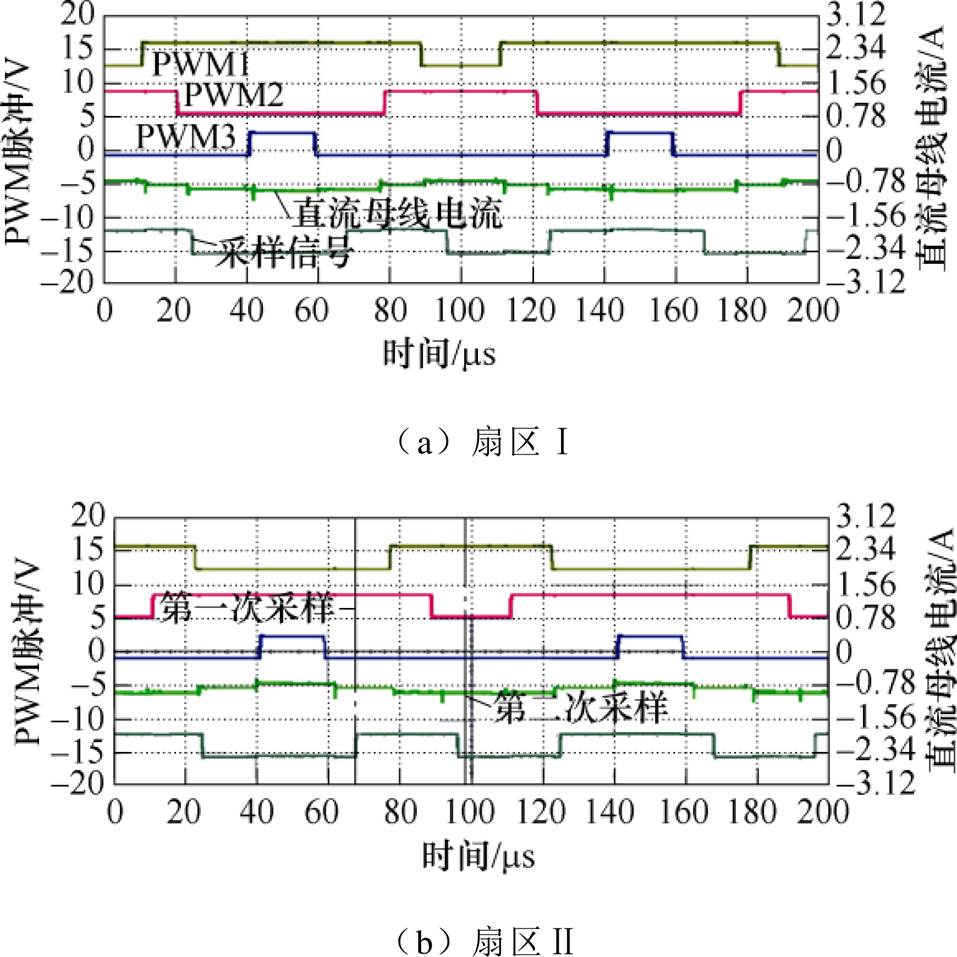

图11 不可观测区域各扇区PWM波形及对应采样时刻
Fig.11 PWM waveforms and corresponding sampling time of each sector in the unobservable area
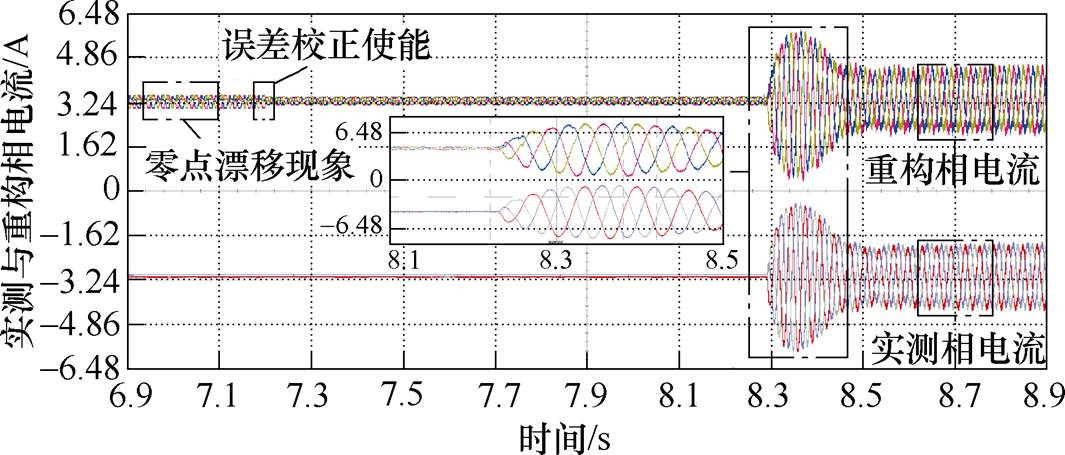
图12 电机起动阶段实测与重构相电流波形
Fig.12 Measured and reconstructed phase current curves during motor start-up
当M=0.7电机平稳运行在转速1 000r/min时,实测相电流和重构相电流如图14所示。在整个电机运行矢量平面内,各扇区切换处电流平滑且在不可观测区域相电流能够准确重构。
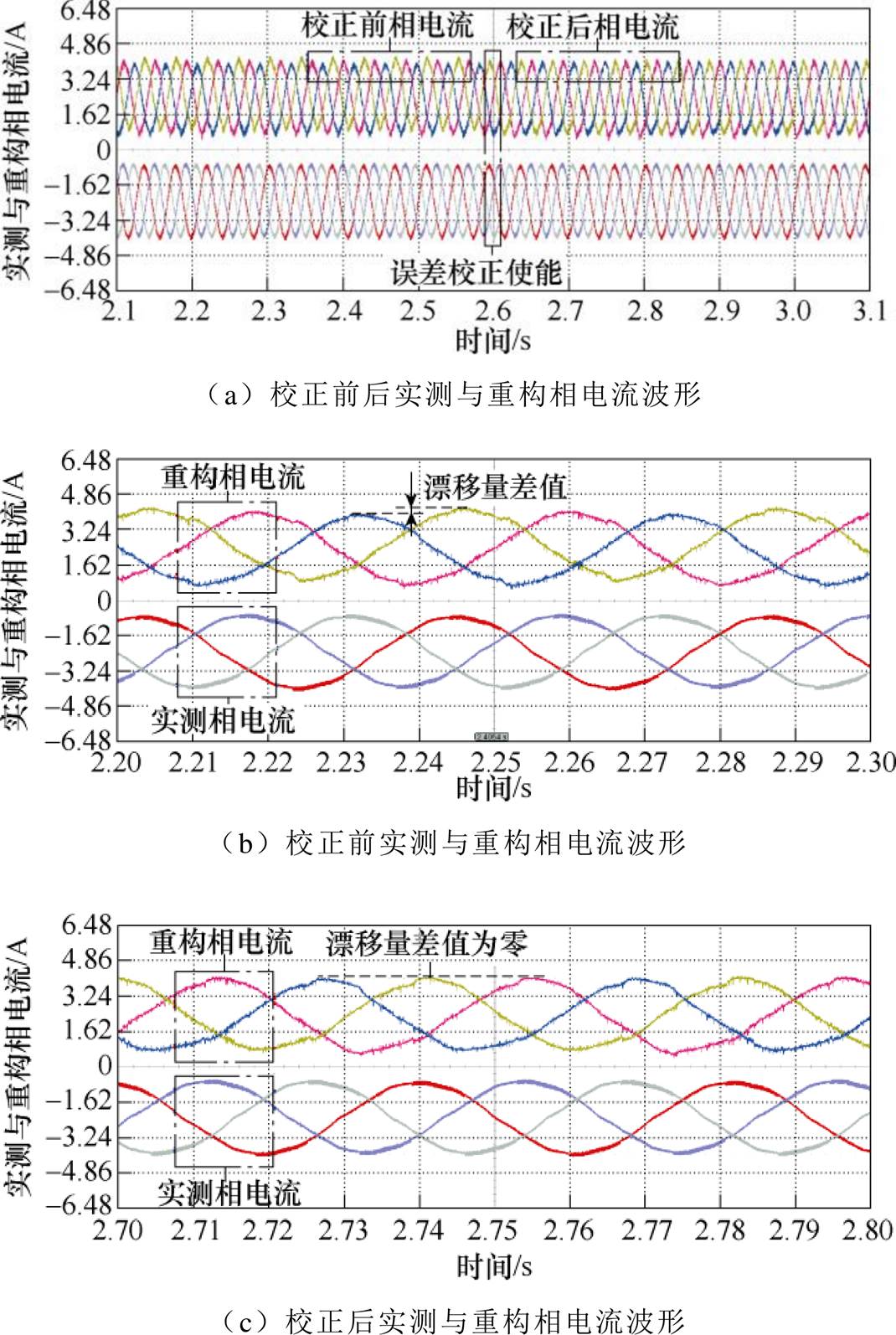
图13 零点漂移自校正前后实测与重构相电流波形
Fig.13 Measured and reconstructed phase current curves before and after zero drift self-calibration

图14 ESM-PWM实测和重构相电流(转速1 000r/min)
Fig.14 ESM-PWM measured and reconstructed phase current (speed 1 000r/min)
由于两次采样时刻不同步和重构算法执行时间等因素的影响,重构相电流相位相比实测相电流有所滞后。定义重构相电流为Irc,实测相电流为Iac,两者重构误差e由式(12)计算得到。校正前后A相实测和重构相电流及误差曲线如图15和图16所示,校正后的最大重构误差由原来的4.12%降低为3.06%。
 (12)
(12)
在低调制度下测试了ESM-PWM方法的重构效果,图17给出了电机在低速(120r/min, M=0.3)运行时,实测相电流和重构相电流曲线。从图中可以看出,实测相电流与重构相电流仍保持良好的正弦曲线。低调制度下ESM-PWM方法A相实测和重构相电流及误差曲线如图18所示,校正后的相电流重构误差控制在3.57%以内。
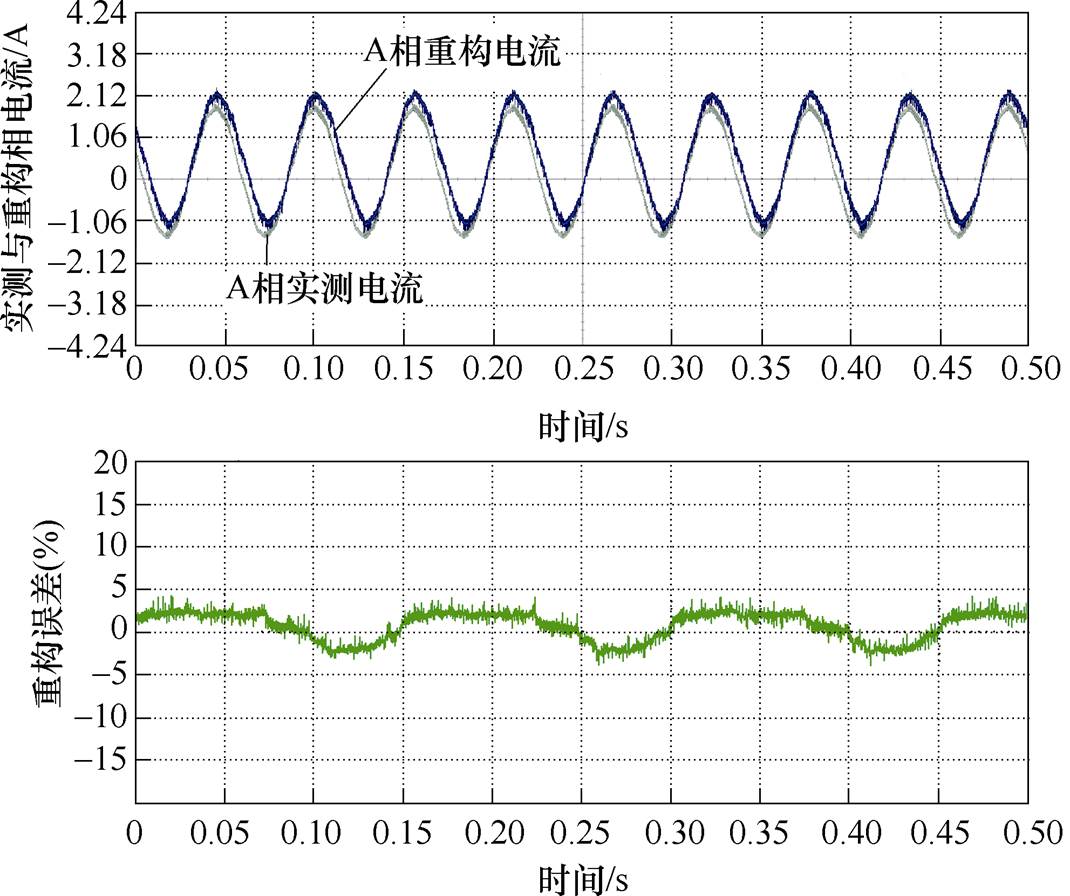
图15 校正前A相实测和重构相电流及误差曲线
Fig.15 A phase measured and reconstructed phase current and error curves before calibration
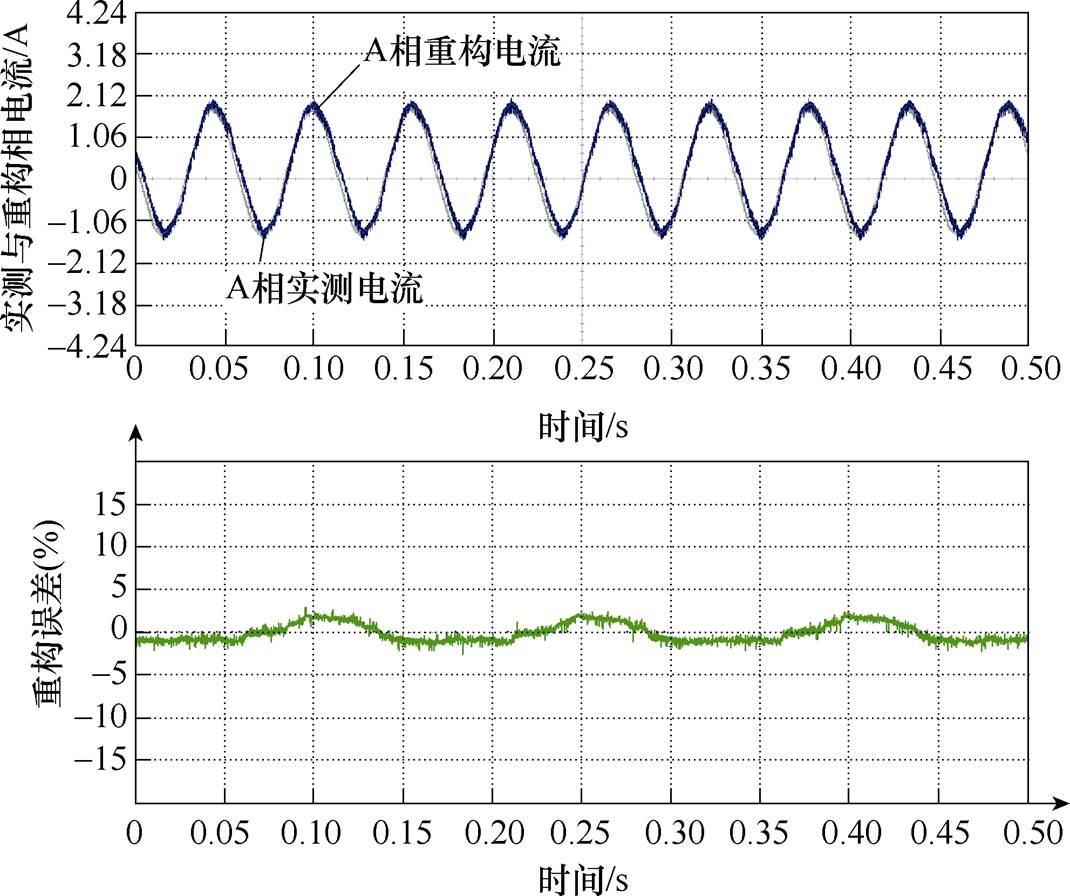
图16 校正后A相实测和重构相电流及误差曲线
Fig.16 A phase measured and reconstructed phase current and error curves after calibration
为了进一步验证ESM-PWM方法的可靠性,电机运行在两种动态工况下进行了实验。电机减速和加速时的实验波形如图19和图20所示,当转速降低或增加时,重构相电流能够立刻跟随实测相电流变化,重构效果良好。
转速为1 000r/mim时,SVPWM和ESM-PWM两种方法得到的实测相电流波形快速傅里叶变换(Fast Fourier Transform, FFT)分析如图21所示。由于引入互补有效电压矢量代替零矢量,ESM- PWM方法的实测电流THD比SVPWM策略提高0.15%(从3.87%~4.02%)。

图17 低速下ESM-PWM实测和重构相电流
Fig.17 Measured and reconstructed phase current of ESM-PWM under low speed
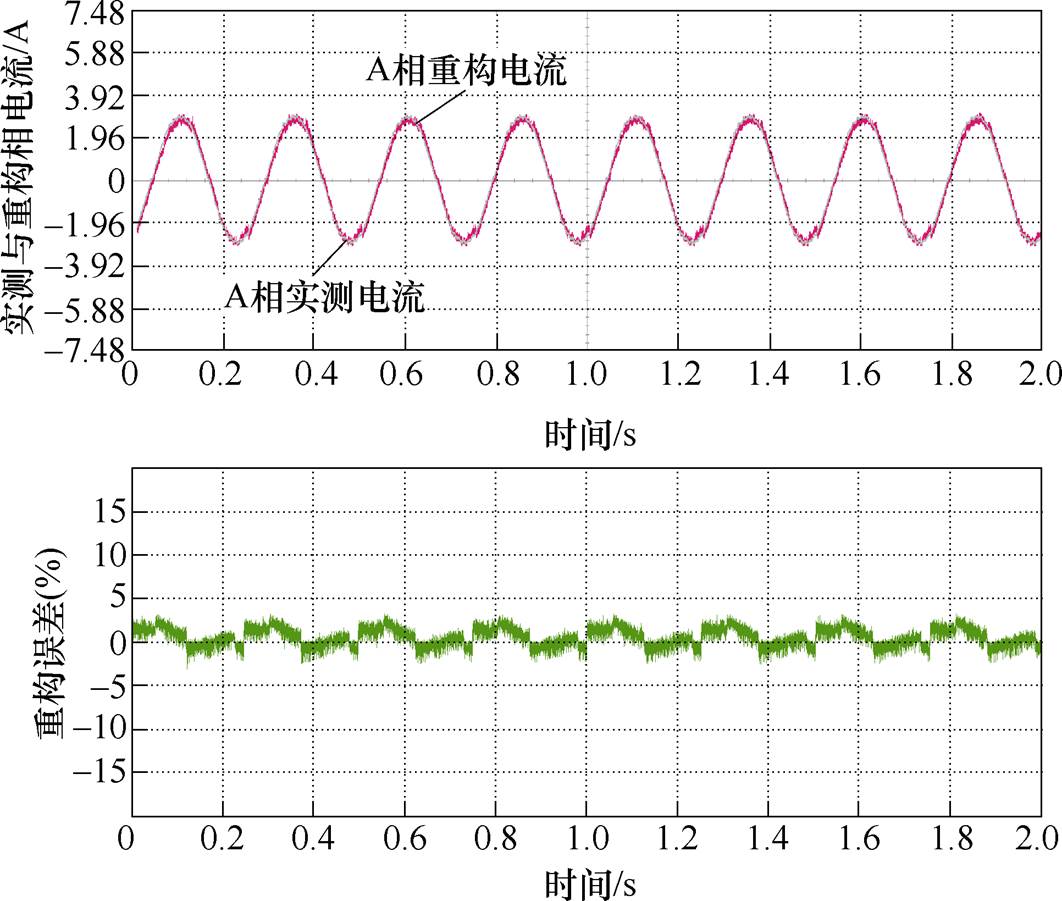
图18 ESM-PWM低速下A相实测和重构相电流及误差曲线
Fig.18 The actual and reconstructed phase current and error curves of phase A under ESM-PWM low speed
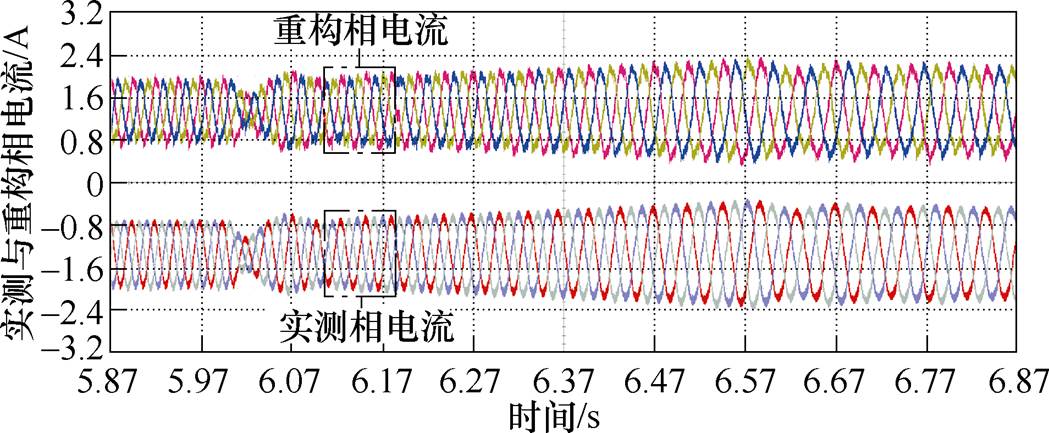
图19 电机减速时ESM-PWM方法实测和重构相电流
Fig.19 Measured and reconstructed phase current of ESM-PWM method when the motor is decelerating
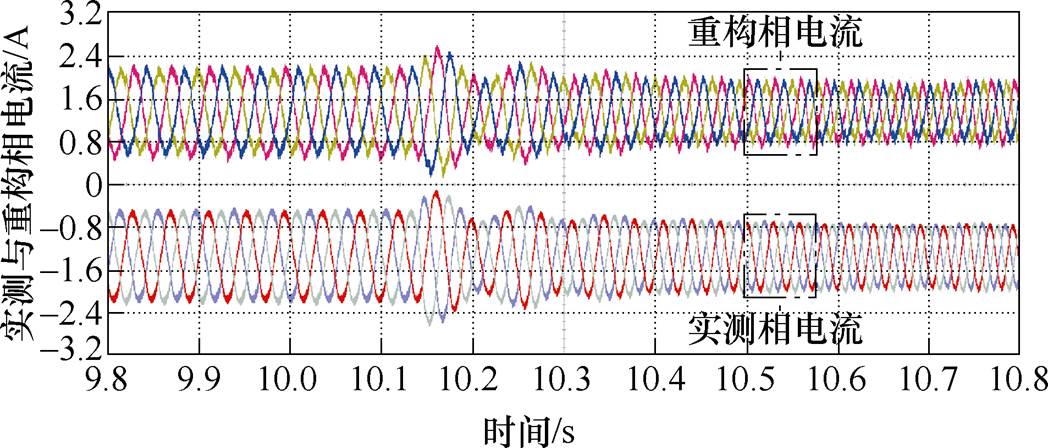
图20 电机加速时ESM-PWM方法实测和重构相电流
Fig.20 Measured and reconstructed phase current of ESM-PWM when the motor is accelerating

图21 SVPWM和ESM-PWM实测相电流波形FFT分析
Fig.21 FFT analysis of actual phase current waveforms of SVPWM and ESM-PWM
针对SCSO技术使用传统SVPWM在不可观测区域相电流无法准确重构的问题,本文提出了一种误差自校正混合脉宽调制策略,为电流传感器提供了可靠的采样窗口,同时实现了电流零点漂移量的自检测和自校正,其主要效果如下:
1)保证了一个周期内PWM波的对称性,延续了SVPWM良好的动静态特性。
2)电流自校正策略一定程度上消除了电流零点漂移引入的重构误差,提高了电流重构精度,最大重构误差小于3.57%。
3)由于引入互补有效电压矢量代替零矢量,相电流THD略有提升,但仍保持在4.02%以下。
参考文献
[1] 黄科元, 周佳新, 刘思美, 等. 考虑逆变器非线性永磁同步电机高频注入电感辨识方法[J]. 电工技术学报, 2021, 36(8): 1607-1616.
Huang Keyuan, Zhou Jiaxin, Liu Simei, et al. Indu- ctance identification method of permanent magnet synchronous motor considering inverter nonlinearity based on high-frequency injection[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1607- 1616.
[2] 陈勇, 张建建, 陈章勇. 基于电流观测器的三相逆变电路开路故障在线诊断[J]. 电工技术学报, 2019, 34(增刊2): 609-617.
Chen Yong, Zhang Jianjian, Chen Zhangyong. A current observer based on-line open-fault diagnosis for three-phase inverter[J]. Transactions of China Electrotechnical Society, 2019, 34(S2): 609-617.
[3] 申永鹏, 郑竹风, 杨小亮, 等. 直流母线电流采样电压空间矢量脉冲宽度调制[J]. 电工技术学报, 2021, 36(8): 1617-1627.
Shen Yongpeng, Zheng Zhufeng, Yang Xiaoliang, et al. A compatible SVPWM method for DC bus current sampling[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1617-1627.
[4] 李国华, 陈钰, 汪玉凤. 三相逆变器随机空间矢量脉宽调制选择性电压谐波消除方法[J]. 电工技术学报, 2020, 35(14): 3041-3049.
Li Guohua, Chen Yu, Wang Yufeng. Selective voltage harmonic elimination in random space vector pulse width modulation for three-phase inverter[J]. Transa- ctions of China Electrotechnical Society, 2020, 35(14): 3041-3049.
[5] 陈超, 陈振, 赵静, 等. 基于五相电流源型逆变器的一种新型PMSM就近空间矢量容错组合策略[J]. 电工技术学报, 2020, 35(增刊2): 404-412.
Chen Chao, Chen Zhen, Zhao Jing, et al. A novel PMSM near space vector fault tolerant combination strategy based on five-phase current source inverter[J]. Transactions of China Electrotechnical Society, 2020, 35(S2): 404-412.
[6] 王文圣, 李珊瑚, 刘旭, 等. 一种基于输入电流矢量相位的新型间接矩阵变换器空间矢量过调制策略[J]. 电气技术, 2020, 21(3): 1-10.
Wang Wensheng, Li Shanhu, Liu Xu, et al. A novel space vector overmodulation strategy based on input current vector phase for indirect matrix converter[J]. Electrical Engineering, 2020, 21(3): 1-10.
[7] Zhang Zeliang, Luo Guangzhao, Zhang Zhengbin, et al. A hybrid diagnosis method for inverter open- circuit faults in PMSM drives[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(3): 180-189.
[8] 赵仕策, 赵洪山, 寿佩瑶. 智能电力设备关键技术及运维探讨[J]. 电力系统自动化, 2020, 44(20): 1-10.
Zhao Shice, Zhao Hongshan, Shou Peiyao. Discussion on key technology and operation & maintenance of intelligent power equipment[J]. Automation of Elec- tric Power Systems, 2020, 44(20): 1-10.
[9] 朱大朋, 苏建徽, 汪海宁, 等. 光伏发电双分裂变压器分布电容对逆变器直流电压的影响[J]. 电力系统自动化, 2020, 44(14): 141-147.
Zhu Dapeng, Su Jianhui, Wang Haining, et al. Influ- ence of distributed capacitance of photovoltaic double- split transformer on DC voltage of inverter[J]. Automation of Electric Power Systems, 2020, 44(14): 141-147.
[10] Lu Haifeng, Cheng Xiaomeng, Qu Wenlong, et al. A three-phase current reconstruction technique using single DC current sensor based on TSPWM[J]. IEEE Transactions on Power Electronics, 2014, 29(3): 1542-1550.
[11] Lee W C, Lee T K, Hyun D S. Comparison of single-sensor current control in the DC link for three-phase voltage-source PWM converters[J]. IEEE Transactions on Industrial Electronics, 2001, 48(3): 491-505.
[12] Saritha B, Janakiraman P A. Sinusoidal three-phase current reconstruction and control using a DC-link current sensor and a curve-fitting observer[J]. IEEE Transactions on Industrial Electronics, 2007, 54(5): 2657-2664.
[13] Kim H, Jahns T M. Phase current reconstruction for AC motor drives using a DC link single current sensor and measurement voltage vectors[J]. IEEE Transa- ctions on Power Electronics, 2006, 21(5): 1413- 1419.
[14] Kim H, Jahns T M. Current control for AC motor drives using a single DC-link current sensor and measurement voltage vectors[J]. IEEE Transactions on Industry Applications, 2006, 42(6): 1539-1547.
[15] 马鸿雁, 孙凯, 魏庆, 等. 变频调速系统过调制时的相电流重构方法[J]. 清华大学学报(自然科学版), 2010, 50(11): 1757-1761.
Ma Hongyan, Sun Kai, Wei Qing, et al. Phase current reconstruction for AC motor adjustable-speed drives in the over-modulation method[J]. Journal of Tsinghua University (Science and Technology), 2010, 50(11): 1757-1761.
[16] 马鸿雁, 孙凯, 魏庆, 等. PWM逆变器相电流重构研究与误差分析[J]. 电工技术学报, 2011, 26(1): 108-114, 161.
Ma Hongyan, Sun Kai, Wei Qing, et al. Phase current reconstruction method for PWM inverter and error analysis[J]. Transactions of China Electrotechnical Society, 2011, 26(1): 108-114, 161.
[17] Gu Yikun, Ni Fenglei, Yang Dapeng, et al. Switching- state phase shift method for three-phase-current reconstruction with a single DC-link current sensor[J]. IEEE Transactions on Industrial Electronics, 2011, 58(11): 5186-5194.
[18] Dusmez S, Qin Ling, Akin B. A new SVPWM technique for DC negative rail current sensing at low speeds[J]. IEEE Transactions on Industrial Electro- nics, 2015, 62(2): 826-831.
[19] Cho Y, LaBella T, Lai J S. A three-phase current reconstruction strategy with online current offset compensation using a single current sensor[J]. IEEE Transactions on Industrial Electronics, 2012, 59(7): 2924-2933.
[20] 顾义坤, 倪风雷, 杨大鹏, 等. 基于母线电流传感器的相电流重构方法[J]. 电机与控制学报, 2009, 13(6): 811-816.
Gu Yikun, Ni Fenglei, Yang Dapeng, et al. Novel method for phase current reconstruction using a single DC-Link current sensor[J]. Electric Machines and Control, 2009, 13(6): 811-816.
[21] Xu Yongxiang, Yan Hao, Zou Jibin, et al. Zero voltage vector sampling method for PMSM three- phase current reconstruction using single current sensor[J]. IEEE Transactions on Power Electronics, 2017, 32(5): 3797-3807.
[22] Yan Hao, Xu Yongxiang, Zou Jibin, et al. A novel open-circuit fault diagnosis method for voltage source inverters with a single current sensor[J]. IEEE Transactions on Power Electronics, 2018, 33(10): 8775-8786.
[23] Tang Qipeng, Shen Anwen, Li Wuhua, et al. Multiple- positions-coupled sampling method for PMSM three-phase current reconstruction with a single current sensor[J]. IEEE Transactions on Power Electronics, 2020, 35(1): 699-708.
[24] Metidji B, Taib N, Baghli L, et al. Phase current reconstruction using a single current sensor of three-phase AC motors fed by SVM-controlled direct matrix converters[J]. IEEE Transactions on Industrial Electronics, 2013, 60(12): 5497-5505.
[25] Shen Yongpeng, Zheng Zhufeng, Wang Qiancheng, et al. DC bus current sensed space vector pulsewidth modulation for three-phase inverter[J]. IEEE Transa- ctions on Transportation Electrification, 2021, 7(2): 815-824.
Error Self-Correction Mixed Pulse Width Modulation Strategy
Abstract The phase current reconstruction of a single current sensor based on the traditional space vector pulse width modulation method has an unobservable area and cannot realize the zero-point drift correction. Therefore, an error self-correcting mixed pulse width modulation method is proposed. Two complementary effective voltage space vectors are inserted in each carrier cycle of the unobservable area to replace the zero-voltage vector, which provides a reliable sampling window for the current sensor and eliminates the current unobservable area. At the same time, through the dynamic double sampling of the complementary effective voltage vector, the self-detection and self-correction of the current zero drift are realized. Under the experimental conditions, the proposed method recon- struction phase current error is less than 3.57%, and the total harmonic distortion of the phase current is less than 4.02%, which can provide a reliable reconstruction phase current for the control system.
keywords:DC bus, phase current reconstruction, error self-calibration, space vector pulse width modulation, error self-correcting mixed pulse width modulation
DOI: 10.19595/j.cnki.1000-6753.tces.210753
中图分类号:TM341
国家自然科学基金项目(61803345, 51807013)和河南省科技攻关项目(202102210303)资助。
收稿日期 2021-05-24
改稿日期 2021-11-27
申永鹏 男,1985年生,博士,副教授,研究方向为电动汽车动力系统驱动与控制、能量管理与优化。E-mail: shenyongpeng@zzuli.edu.cn
王前程 男,1996年生,硕士研究生,研究方向为交流电驱动系统控制策略。E-mail: wangqch_zzuli@126.com(通信作者)
(编辑 陈 诚)