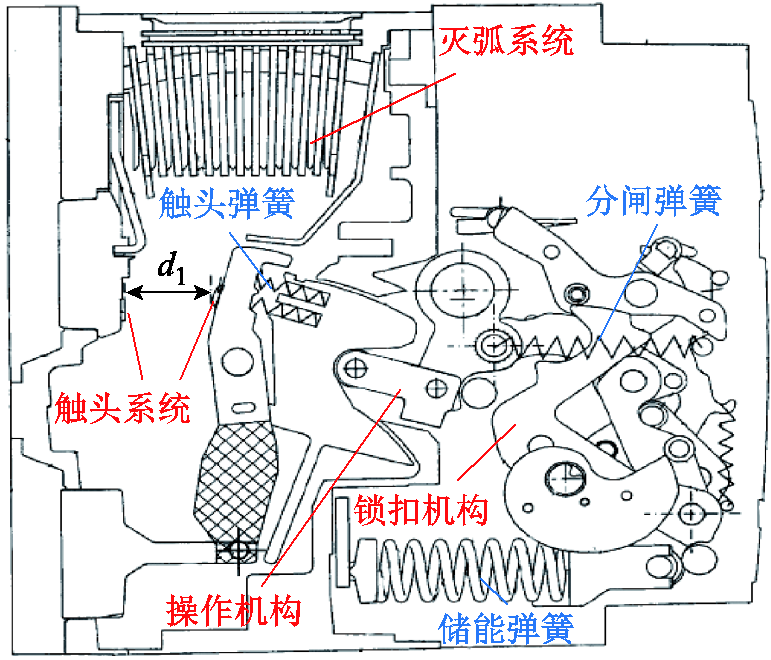
图1 框架断路器内部主要机构
Fig.1 Main internal mechanism of air circuit breaker
摘要 低压断路器作为低压配电系统中重要的保护装置,主要用于切断和接通负荷电路以及断开故障电路,以保证系统安全稳定运行。断路器内部机械部件的可靠运行对其操作性能至关重要,随着操作次数的增加,断路器的机械特性将逐渐退化,最终破坏操作机构的正常运动,进而引起合分闸失败,甚至对配电系统造成影响。为了准确监测低压断路器的机械特性,提出基于操作机构运动特性的低压断路器机械特性状态监测方法。首先,根据操作机构的运动特性分析机构合分闸过程中的旋转特征,并选取能够反映操作机构性能的特征量;其次,定量分析触头磨损、机构磨损和分闸弹簧断裂对机构性能的影响,通过实时监测特征量的变化实现机械部件性能的诊断;最后,通过定量计算触头超程性能退化对分闸能量和机构性能的影响,实现触头超程状态的监测。实验结果表明,所提方法能够有效监测低压断路器机械部件的状态信息,实现触头超程状态的准确评估,为低压断路器机械特性状态监测与诊断提供一种新方法。
关键词:低压断路器 机械 操作机构 触头超程 状态监测
低压断路器是低压配电系统中重要的控制和保护设备,其可靠运行对电力系统极其重要[1-6]。随着操作次数的增加,断路器承受的电气应力和机械应力会导致机构内部机械部件的性能退化,最终无法正常运行,因此,如何有效且准确地监测断路器内外部信号并在线诊断断路器性能退化部件和退化程度是目前亟须解决的问题。其中,通过监测断路器机械特性对其性能进行评估是最常用的方法[7-8]。断路器的机械特性主要包括触头开距、触头超程、合分闸时间、合分闸速度和操作力矩等[9]。其中,触头超程是非常关键的特征量,它不仅影响其他机械特性,还会影响回路电阻、断路器机械寿命以及电寿命[10]。框架断路器一般用在大容量负荷回路上,常常作为低压配电系统中变压器的出口保护,因此本文重点分析框架断路器的机械特性。
目前,断路器的状态监测一般包括线圈电流信号监测、振动信号监测和声音信号监测三类。其中,断路器分合闸线圈中的电流信号包含大量的断路器运行信息[11-15],梅飞[13]和倪建军[14]等通过分析断路器机构故障对分合闸线圈电流信号的影响,实现断路器状态的在线监测与故障诊断。近年来,国内外学者在利用振动信号监测断路器性能方面已取得了许多有价值的成果[16-23]。谭佳明等使用短时能量法、总能量分析法及信息熵法对振动信号分析处理,实现断路器状态监测[16]。万书亭等利用动态时间规整(Dynamic Time Warping, DTW)算法对两个短时能熵比序列进行规整匹配以得到最优匹配路径,之后根据匹配路径曲线的变化情况判断断路器的工作状况[18]。还有一些学者通过声音信号评估断路器操作性能[24-25],杨元威等利用Kolmogorov-Smirnov检验法搜索故障信号与正常信号幅值分布的差异区间,通过分析贡献最大的若干特征量实现断路器机械故障的诊断[24]。
近年来,国内外学者在监测断路器触头超程方面也取得了众多成果[26-27],杨秋玉等采用希尔伯特-黄变换(Hilbert-Huang Transform, HHT)处理断路器振动信号,探究经验模态分解(Empirical Mode Decomposition, EMD)得到本征模态函数(Intrinsic Mode Fuction, IMF)Hilbert边际谱能量随触头超程变化的规律[26],并采用集合经验模态分解(Ensemble EMD, EEMD)得到反映振动信号局部特性的IMF分量, 计算前8阶IMF分量的Hilbert边际谱能量值, 构造反映触头超程变化的振动信号特征量, 最后结合支持向量机(Support Vector Machine, SVM)实现高压断路器触头超程状态的自动识别[27]。
近年来,关于机械部件和触头超程性能退化对断路器操作性能影响机理的研究较少,且状态监测方法的主要研究对象为高压断路器。同时框架断路器在实际使用过程中常会出现零部件磨损、变形、断裂等故障,这些故障会导致断路器运行性能降低,严重时会造成断路器合分闸失败等事故。鉴于此,本文分析了曲柄铰接点、电极笼铰接点和动触头在合分闸过程中的位移曲线,选取能够反映操作机构性能的特征量,研究了不同机械部件和触头超程性能退化对特征量的影响机制,实现了框架断路器机械特性状态的监测。
框架断路器主要由操作机构、触头系统、灭弧系统、保护系统(过载保护、短路保护)、锁扣机构组成,其中操作机构中含有两组弹簧(储能弹簧和分闸弹簧),触头系统中含有一组弹簧(触头弹簧),其主要机构如图1所示。
图1 框架断路器内部主要机构
Fig.1 Main internal mechanism of air circuit breaker
框架断路器的操作性能主要由操作机构、触头系统和锁扣机构决定,机构中任一机械部件发生性能退化都会导致机构的运动规律发生改变。具体机构示意图如图2a所示,操作机构中驱动杆IH、驱动连杆GH、曲柄FG组成的驱动机构和曲柄FE、触头连杆DE、电极笼CD组成的动触头机构共用一个曲柄,对操作机构进行简化示意图如图2b所示。
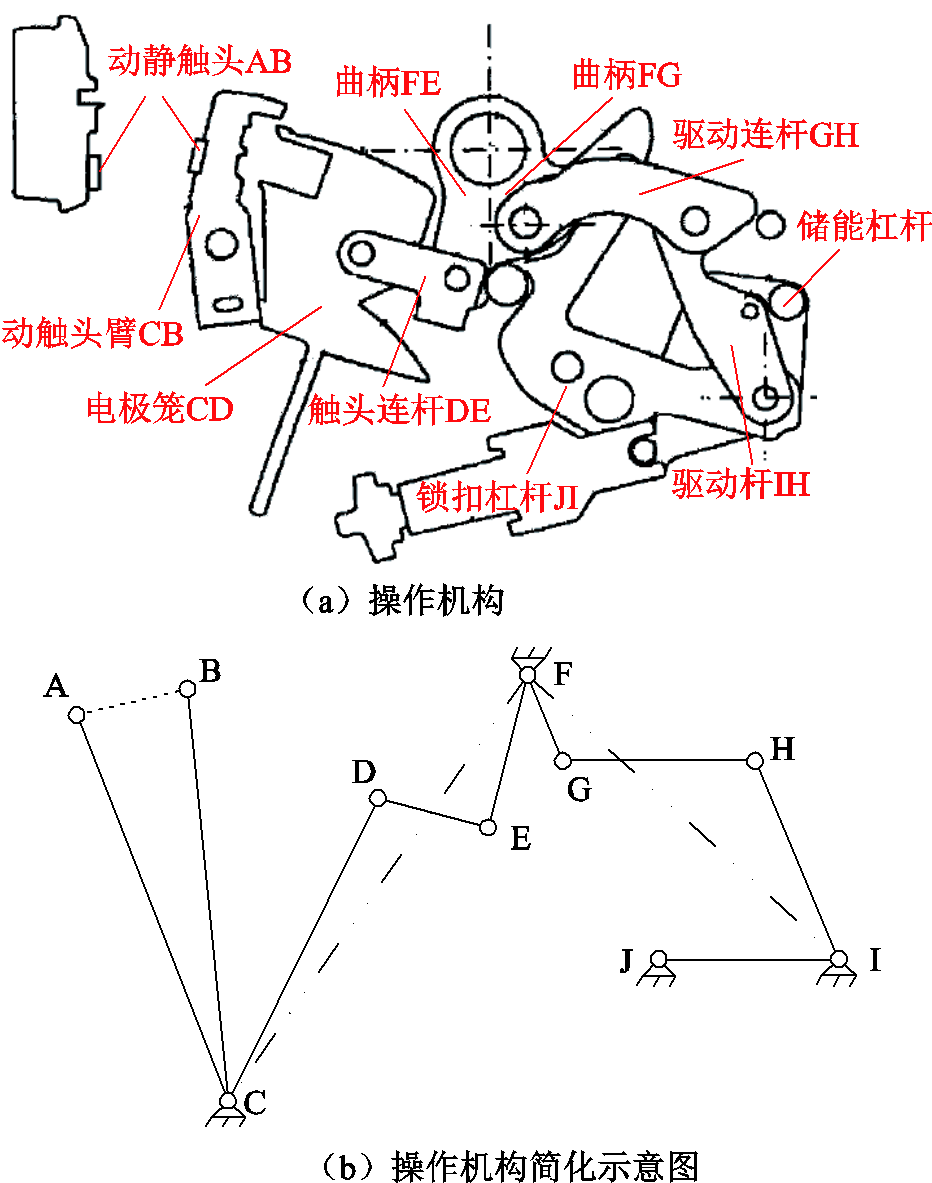
图2 框架断路器操作机构及简化示意图
Fig.2 Operating mechanism and its schematic diagram of air circuit breaker
根据操作机构中各连杆的连接方式,可建立机构合分闸过程的运动方程,并获取机构运动过程中反映其操作性能的特征量。
框架断路器合闸过程中,储能弹簧释放能量驱动储能杠杆和驱动杆IH转动( ),进而驱动曲柄FE(
),进而驱动曲柄FE( )、电极笼CD(
)、电极笼CD( )和动触头臂CB(
)和动触头臂CB( )转动;当动静触头接触后,动触头臂CB停止转动,但机构中其他连杆会继续转动且压缩触头弹簧,直至驱动杆IH越过机构死区并抵靠在锁扣杠杆JI上完成锁定,断路器完成合闸操作。具体合闸运动过程如图3所示,图中相同字母代表同一部件,B1、D1、E1、G1、H1表示合闸初始时刻各部件所在位置,B2、D2、E2、G2、H2表示合闸末态时刻各部件所在位置,C、F、I表示合闸过程中机构固定点所在位置,l1~l9表示机构中各连杆的长度,l10表示动静触头间最大开距。
)转动;当动静触头接触后,动触头臂CB停止转动,但机构中其他连杆会继续转动且压缩触头弹簧,直至驱动杆IH越过机构死区并抵靠在锁扣杠杆JI上完成锁定,断路器完成合闸操作。具体合闸运动过程如图3所示,图中相同字母代表同一部件,B1、D1、E1、G1、H1表示合闸初始时刻各部件所在位置,B2、D2、E2、G2、H2表示合闸末态时刻各部件所在位置,C、F、I表示合闸过程中机构固定点所在位置,l1~l9表示机构中各连杆的长度,l10表示动静触头间最大开距。
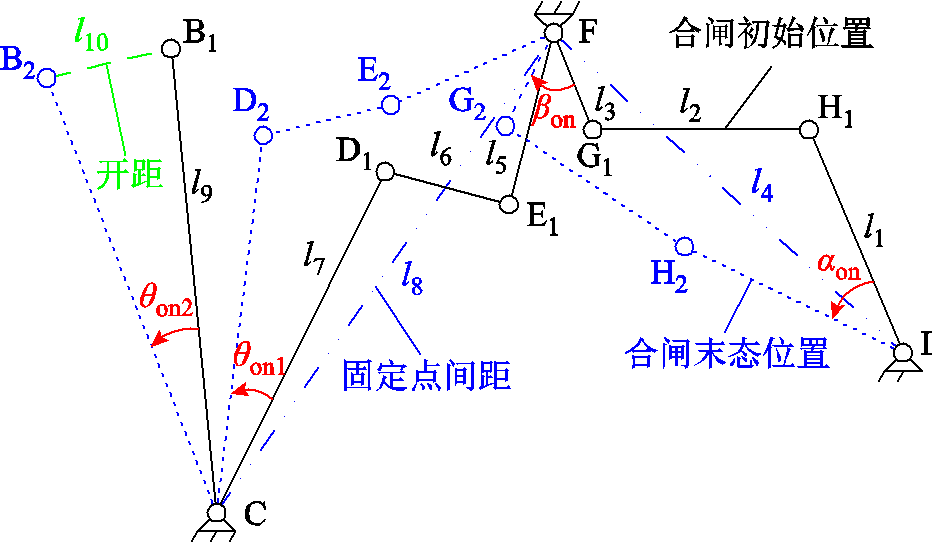
图3 框架断路器合闸过程操作机构运动示意图
Fig.3 Movement of operating mechanism during closing process of air circuit breaker
根据矢量方程法建立操作机构合闸过程中各连杆间的运动关系方程
 (1)
(1)
 (2)
(2)
式中
根据式(1)、式(2)计算框架断路器合闸过程中机构各构件位移关系,如图4所示。可以看出,框架断路器合闸过程分为三个阶段:阶段Ⅰ,动静触头接触前,电极笼CD和动触头臂CB同轴转动;阶段Ⅱ,动静触头接触后,动触头臂CB停止转动,机构向死区转动;阶段Ⅲ,机构越过死区,之后向末态位置转动,完成合闸操作。
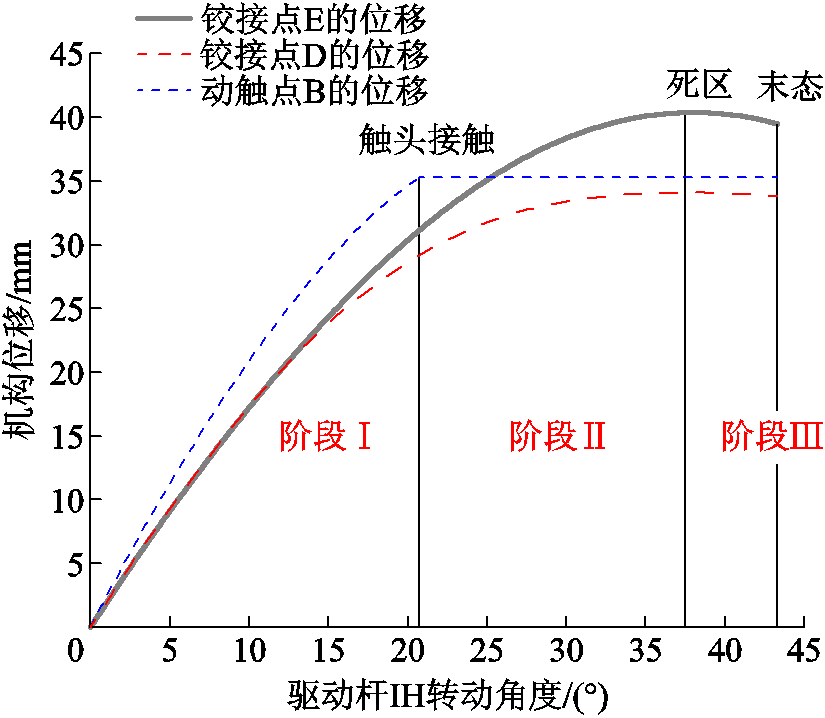
图4 合闸过程机构各构件位移关系图
Fig. 4 Displacement relation between connecting rods of mechanism during closing process
由上述分析可知,框架断路器在合闸过程中存在动、静触头接触、死区和末态三个特征位置。其中,动、静触头接触时,触头碰撞会产生较大的冲击反力,同时触头弹簧也会提供反力,两种反力相加将大于储能弹簧提供的合闸动力,导致机构减速,因此机构合闸过程中速度最大点与动静触头接触点处于同一时刻。同时动静触头接触后动触头臂CB停止转动,电极笼CD继续压缩触头弹簧,因此铰接点D和铰接点E从触头接触到机构末态的位移可以代表触头超程,即触头弹簧压缩量。
测量铰接点E、铰接点D、动触点B合闸过程的位移,对输出波形进行滤波处理,机构合闸过程的具体波形如图5所示。合闸过程中机构运动过程特征量见表1。
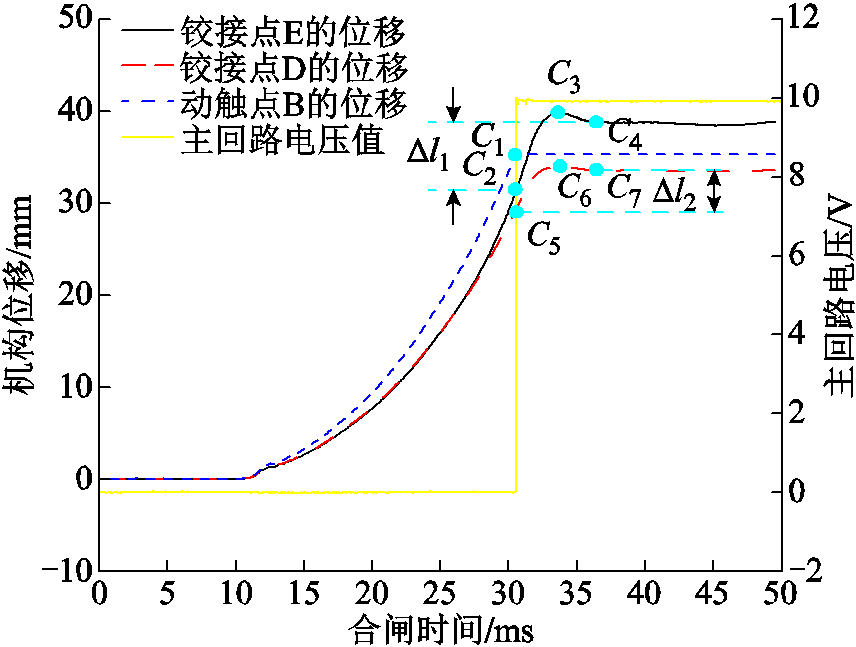
图5 合闸过程中机构位移波形及特征量
Fig.5 Displacement waveform and characteristics of mechanism during closing process
框架断路器在分闸过程中,锁扣杠杆JI先解除锁定,使驱动机构由四连杆机构转化为五连杆机构,之后触头弹簧释放能量驱动电极笼CD转动( ),进而驱动曲柄FE转动(
),进而驱动曲柄FE转动( );当触头弹簧释放完毕后,动触头臂CB(
);当触头弹簧释放完毕后,动触头臂CB( )跟随电极笼进行转动,直至曲柄FE撞击止动件造成反弹,反弹过程中分闸弹簧提供拉力,使得机构回到止动位置,断路器完成分闸操作。具体分闸运动过程如图6所示,图中相同字母代表同一部件,B1、D1、E1、G1、H1、I1表示分闸初始时刻各部件所在位置,B2、D2、E2、G2、H2、I2表示分闸末态时刻各部件所在位置,C、F、J表示分闸过程中机构固定点所在位置,l5~l9表示机构中各连杆的长度。
)跟随电极笼进行转动,直至曲柄FE撞击止动件造成反弹,反弹过程中分闸弹簧提供拉力,使得机构回到止动位置,断路器完成分闸操作。具体分闸运动过程如图6所示,图中相同字母代表同一部件,B1、D1、E1、G1、H1、I1表示分闸初始时刻各部件所在位置,B2、D2、E2、G2、H2、I2表示分闸末态时刻各部件所在位置,C、F、J表示分闸过程中机构固定点所在位置,l5~l9表示机构中各连杆的长度。
表1 合闸过程中机构运动过程特征量
Tab.1 Characteristics of mechanism during closing process
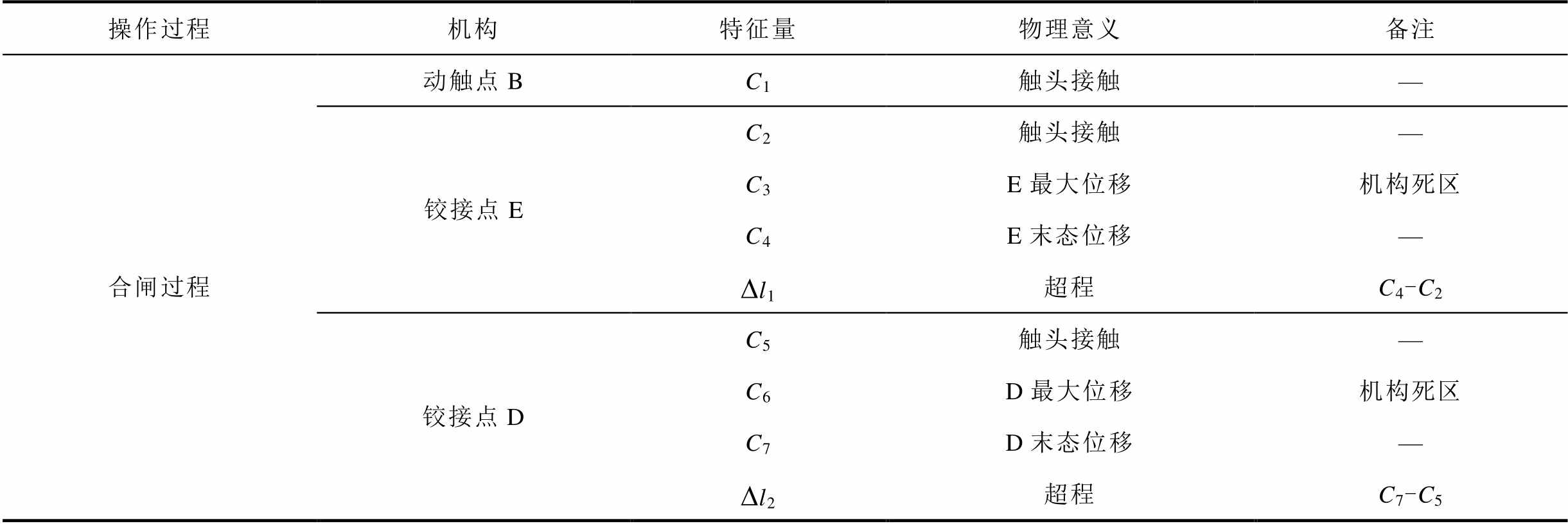
操作过程机构特征量物理意义备注 合闸过程动触点BC1触头接触— 铰接点EC2触头接触— C3E最大位移机构死区 C4E末态位移— Dl1超程C4-C2 铰接点DC5触头接触— C6D最大位移机构死区 C7D末态位移— Dl2超程C7-C5
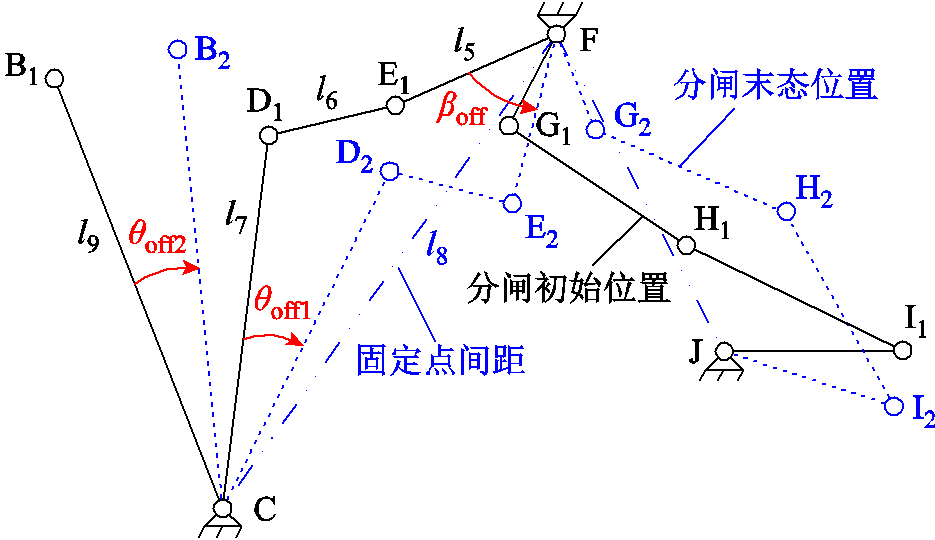
图6 框架断路器分闸过程机构运动示意图
Fig.6 Movement of operating mechanism during opening process
根据矢量方程法建立框架断路器动触头机构分闸过程中各连杆间的运动关系方程为
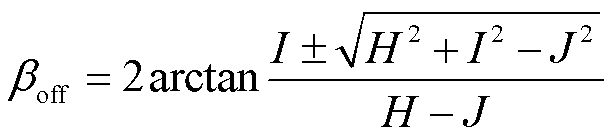 (3)
(3)
式中
根据式(3)计算框架断路器分闸过程中机构各构件位移关系,如图7所示。可以看出,框架断路器分闸过程分为三个阶段:阶段Ⅰ,动静触头分离前,电极笼CD驱动曲柄FE转动,动触头臂CB保持不动;阶段Ⅱ,动静触头分离后,电极笼CD和动触头臂CB同轴转动,机构向止动件转动;阶段Ⅲ,机构撞击止动件并反弹,之后返回至末态位置(图中未画出)。
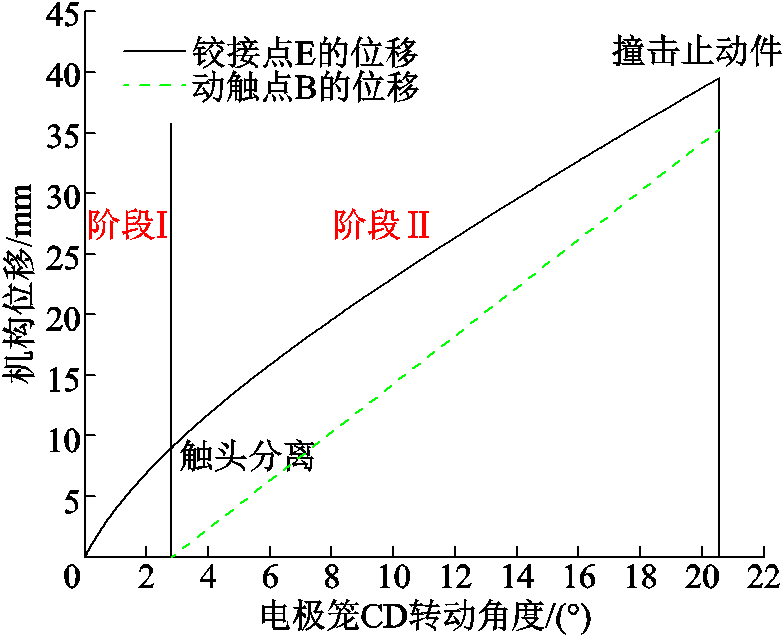
图7 分闸过程机构各构件位移关系图
Fig.7 Displacement relation between connecting rods of mechanism during opening process
由上述分析可知,在分闸过程中机构存在动静触头分离、机构撞击止动件、反弹最大角度三个特征位置。其中,动、静触头分离时,触头弹簧完全释放不再提供分闸动力,同时动触头臂CB的引入会产生较大的冲击反力,导致机构减速,因此机构分闸速度最大点与动静触头分离点为同一时刻。同时动触点B在阶段Ⅱ中的斜率反映机构的分闸能量。
测量铰接点E、铰接点D、动触点B分闸过程的位移,对输出波形进行滤波处理,机构分闸过程的具体波形如图8所示,分闸过程中机构运动过程特征量见表2。
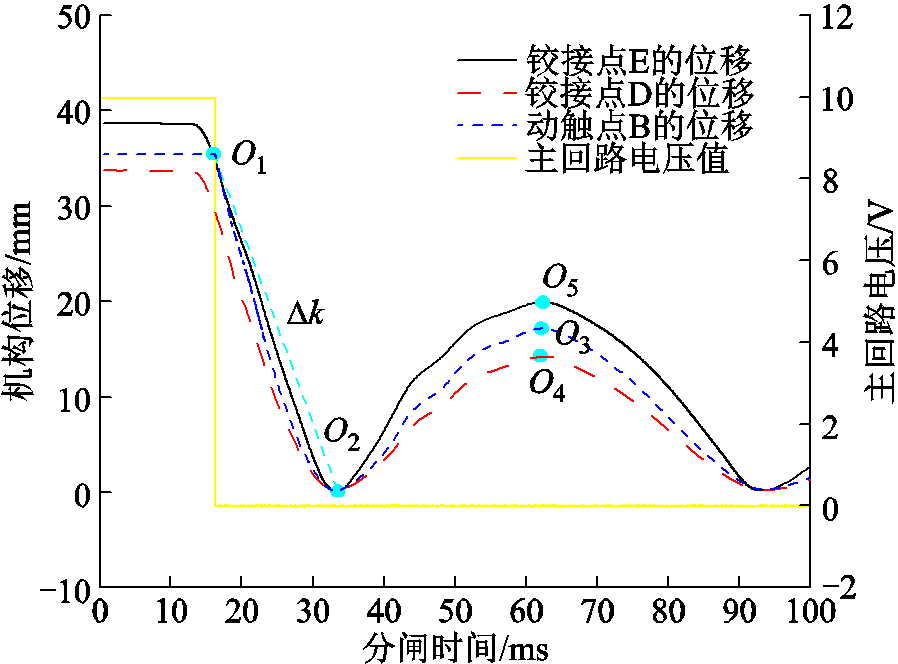
图8 分闸过程中机构位移波形及特征量
Fig.8 Displacement waveforms and characteristics of mechanism during opening process
表2 分闸过程中机构运动过程特征量
Tab.2 Characteristics of mechanism during opening process
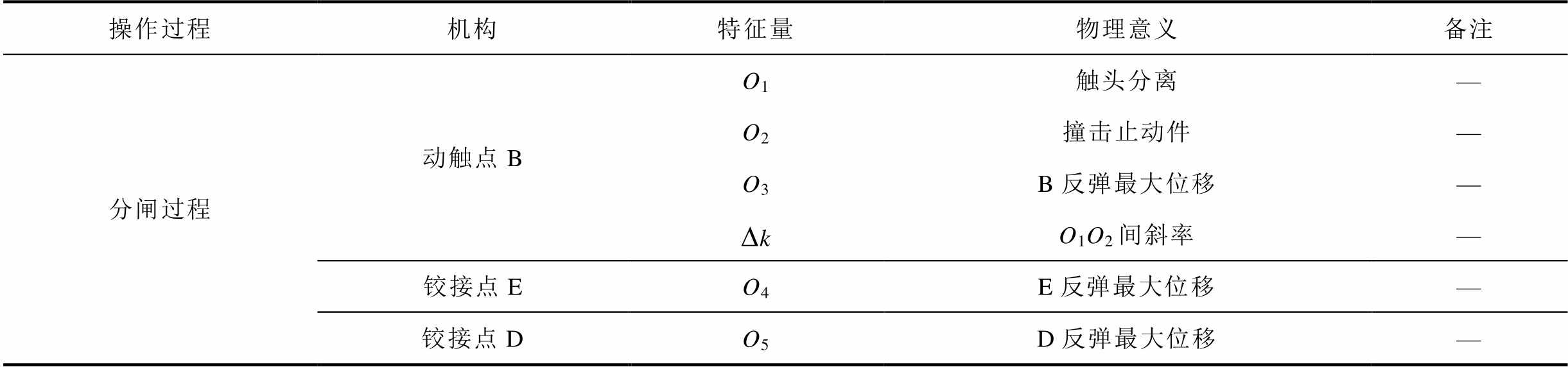
操作过程机构特征量物理意义备注 分闸过程动触点BO1触头分离— O2撞击止动件— O3B反弹最大位移— DkO1O2间斜率— 铰接点EO4E反弹最大位移— 铰接点DO5D反弹最大位移—
随着操作次数增加,框架断路器机械部件的性能会逐渐退化,最终导致断路器失效。由电气应力和机械应力引起的机械部件性能退化或故障,主要包括触头磨损、操作机构磨损和分闸弹簧断裂,可根据机构运动特性,分析不同机械部件性能退化对框架断路器特征量和操作性能的影响。
框架断路器每次合分闸过程中,动、静触头接触时的机械力会导致触头机械磨损,另一方面,在分断电流过程中,电弧、热应力等因素会导致触头电磨损。可根据机构运动特性分析触头磨损对机构特征量和操作性能的影响。
合闸过程中,触头磨损会使动、静触头间开距增大,动触点B、铰接点D和铰接点E需要多运动一定位移才能使动、静触头接触,导致超程减小。触头磨损前后动、静触头接触时刻的机构位置变化如图9所示,图中相同字母代表同一部件,B1、D1、E1表示触头完好情况下各部件所在位置,B2、D2、E2表示触头磨损情况下各部件所在位置,C、F表示机构固定点所在位置。
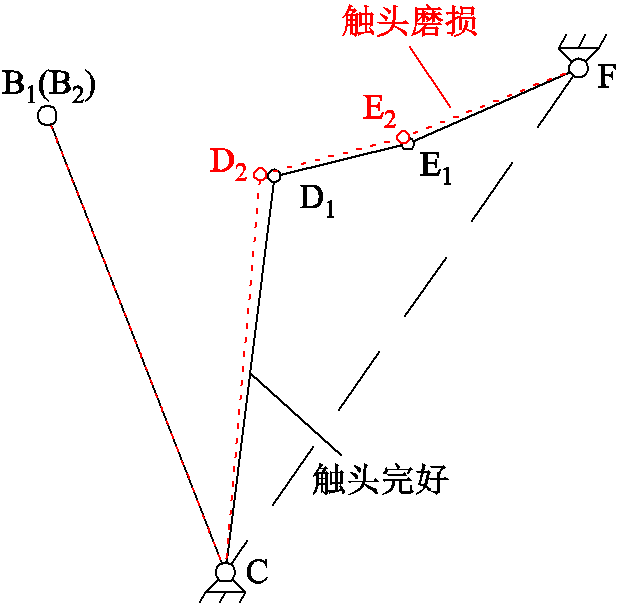
图9 触头磨损前后触头接触时刻机构位置变化示意图
Fig.9 Mechanism position change at the time of contacting before and after contact abrasion
分闸过程中,超程减小使得触头弹簧压缩量减小,即机构的分闸能量降低,导致分闸速度降低和动触点B在阶段Ⅱ的斜率减小,机构撞击止动件后的反弹能量减小,使得机构反弹最大位移减小。同时触头弹簧压缩量减小会使机构完全释放触头弹簧所需运动的位移减小,导致动触点B提前运动。综上所述,触头磨损对框架断路器机构合分闸过程特征量的影响见表3。
表3 触头磨损对框架断路器机构合分闸过程特征量的影响
Tab.3 Influence of contact abrasion on characteristics of mechanism during closing and opening process
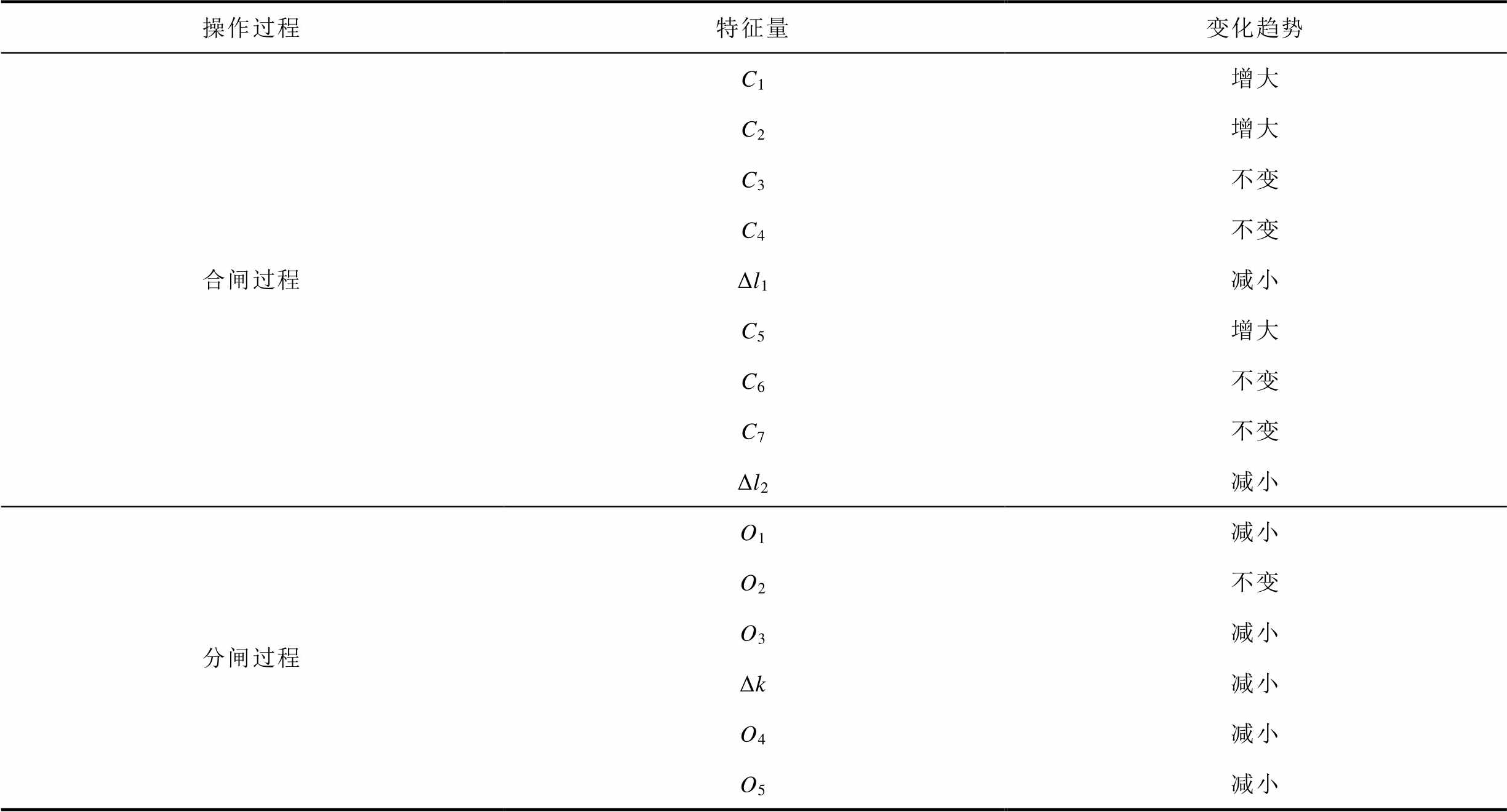
操作过程特征量变化趋势 合闸过程C1增大 C2增大 C3不变 C4不变 Δl1减小 C5增大 C6不变 C7不变 Δl2减小 分闸过程O1减小 O2不变 O3减小 Δk减小 O4减小 O5减小
触头磨损会直接导致动触点B的位移增大,因此根据式(1)、式(2)定量计算触头磨损量与合闸过程特征量的关系,所得结果见表4。可以看出,触头磨损会使得C1、C2、C5、Dl1和Dl2出现变化,因此可通过监测上述五个特征量的变化判断触头的磨损程度。
表4 触头磨损量与机构合闸过程特征量的关系
Tab.4 Relationship between contact abrasion and characteristics of mechanism during closing process

触头磨损量0mm1mm2mm3mm4mm C1/mm34.2735.3036.3637.4238.51 C2/mm30.0431.1932.3933.6835.07 Dl1/mm10.219.017.726.354.85 C5/mm28.4529.2730.1130.9531.77 Dl2/mm5.484.643.812.962.12
润滑失效等原因会使操作机构中各连杆的铰接点磨损,导致机构固定位置和构件有效长度发生改变。合闸初始时刻机构具体变化如图10所示,图中相同字母代表同一部件,B1、D1、E1、G1、H1表示铰接点完好情况下各部件所在位置,B2、D2、E2、G2、H2表示铰接点磨损情况下各部件所在位置,C、F、I表示机构固定点所在位置。由于铰接点G、H和D、E磨损对机构运行性能的影响不同,因此分开进行分析。
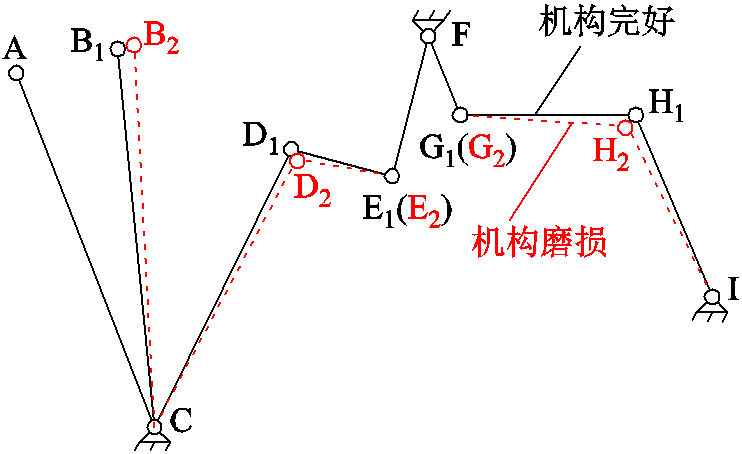
图10 铰接点磨损对机构合闸初始位置的影响
Fig.10 Influence of hinge point wear on initial closing position of mechanism
2.2.1 铰接点G、H磨损
合闸过程中,铰接点G、H磨损使得连杆GH的有效长度变短,导致机构到达死区位置和合闸末态位置时铰接点E、铰接点D的位移和超程减小。铰接点G、H磨损前后机构特征位置变化示意图如图11所示,图中相同字母代表同一部件,G1、H1、D1、E1、B1表示铰接点G、H完好情况下各部件所在位置,G2、H2、D2、E2、B2表示铰接点G、H磨损情况下各部件所在位置,F、I、C表示机构固定点所在位置。
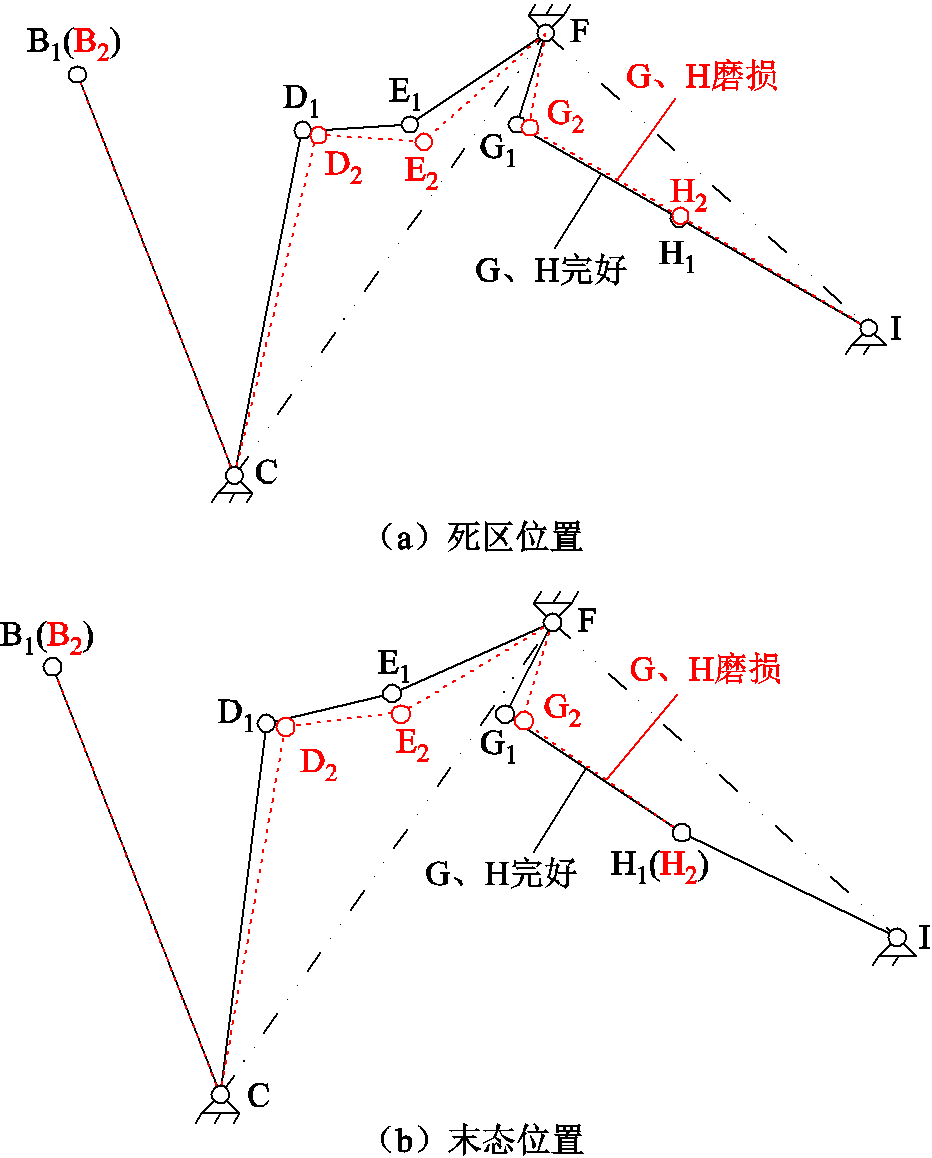
图11 铰接点G、H磨损前后机构特征位置变化示意图
Fig.11 Position change of mechanism characteristics before and after abrasion of articulated points G and H
分闸过程中,铰接点G、H磨损与触头磨损对机构分闸过程特征量的影响相同,由于超程减小,使得分闸能量降低,导致分闸速度降低、动触点B在阶段Ⅱ的斜率减小、机构反弹最大位移减小和机构完全释放触头弹簧所需运动的位移减小。综上所述,铰接点G、H磨损对框架断路器合分闸过程中特征量的影响见表5。
表5 铰接点G、H磨损对框架断路器机构合分闸过程特征量的影响
Tab.5 Influence of abrasion of articulated points G and H on characteristics of mechanism in closing and opening process

操作过程特征量变化趋势 合闸过程C1不变 C2不变 C3减小 C4减小 Dl1减小 C5不变 C6减小 C7减小 l2减小 分闸过程O1减小 O2不变 O3减小 Dk减小 O4减小 O5减小
根据式(1)、式(2)定量计算铰接点G、H磨损量与合闸特征量的关系,所得结果见表6。可以看出,铰接点G、H磨损会使得C3、C4、C6、C7、Dl1和Dl2出现明显变化,因此可通过监测上述六个特征量的变化判断铰接点G、H的磨损程度。
表6 铰接点G、H磨损量与机构合闸过程特征量的关系
Tab. 6 Relationship between abrasion of articulated points G and H and characteristics of mechanism in closing process

铰接点G、H磨损量0mm0.5mm1mm1.5mm C3/mm40.4139.6638.9138.16 C4/mm39.2138.7437.9837.21 Dl1/mm10.219.388.547.69 C6/mm34.1633.9133.6333.31 C7/mm33.8533.5633.2332.88 Dl2/mm5.485.194.864.49
2.2.2 铰接点D、E磨损
合闸过程中,铰接点D、E磨损使得连杆DE的有效长度变短,导致触头开距增大,进而导致动触点B、铰接点D、铰接点E需要多运动一定位移才能使动、静触头接触,同时导致机构到达死区位置和合闸末态位置时铰接点D的位移和超程减小,但不会对铰接点E的最大和末态位移造成影响。铰接点D、E磨损前后机构特征位置变化如图12所示,图中相同字母代表同一部件,G1、H1、D1、E1、B1表示铰接点D、E完好情况下各部件所在位置,G1、H1、D2、E2、B2表示铰接点D、E磨损情况下各部件所在位置,F、I、C表示机构固定点所在位置。
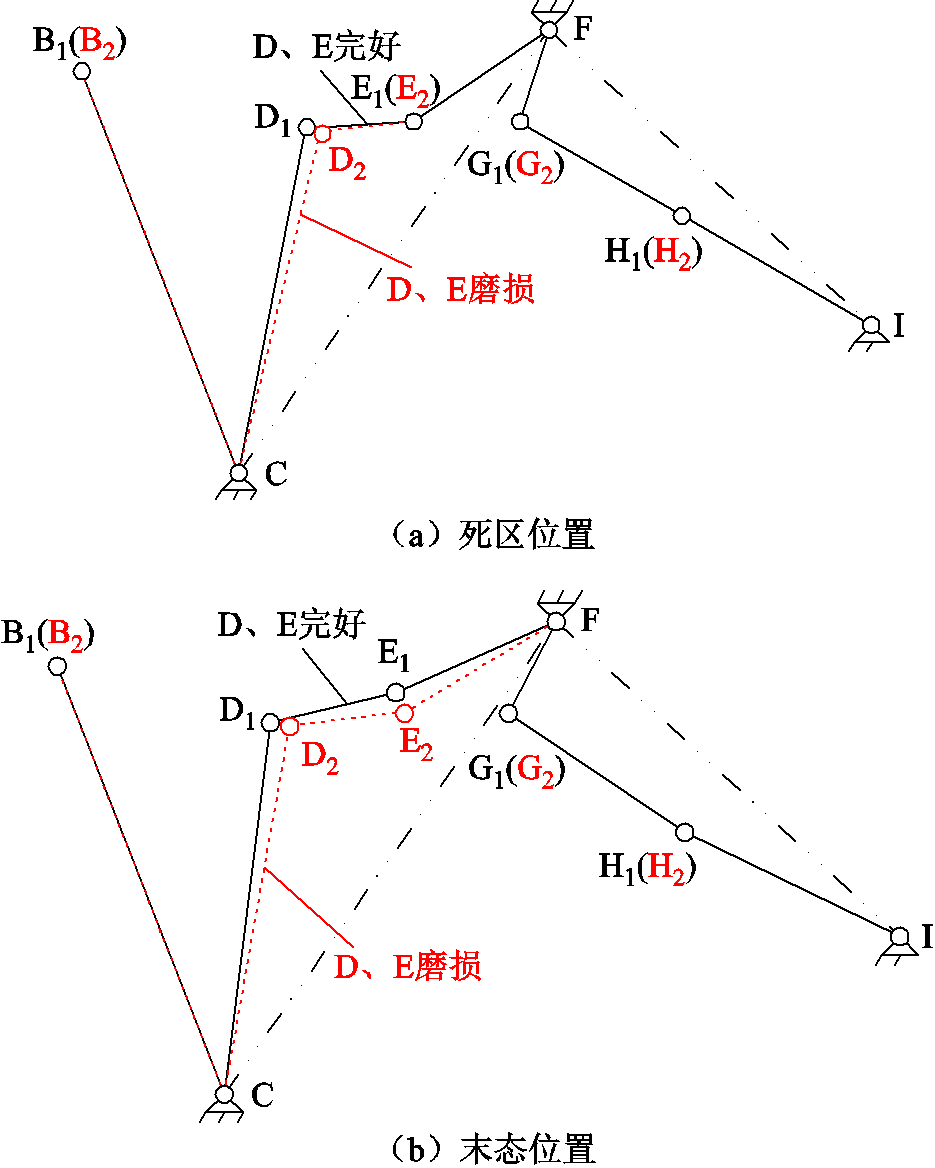
图12 铰接点D、E磨损前后机构特征位置变化示意图
Fig.12 Position change of mechanism characteristics before and after abrasion of articulated points D and E
分闸过程中,铰接点D、E磨损与触头磨损对机构分闸过程特征量的影响相同,由于超程减小,使得分闸能量降低,导致分闸速度降低、动触点B在阶段Ⅱ的斜率减小、机构反弹最大位移减小和机构完全释放触头弹簧所需运动的位移减小。综上所述,铰接点D、E磨损对框架断路器合分闸过程中特征量的影响见表7。
根据式(1)、式(2)定量计算铰接点D、E磨损量与合闸特征量的关系,所得结果见表8。可以看出,铰接点D、E磨损会使得C1、C2、C5、C6、C7、Dl1和Dl2出现明显变化,因此可通过监测上述七个特征量的变化判断铰接点D、E的磨损程度。
表7 铰接点D、E磨损对框架断路器机构合分闸过程特征量的影响
Tab.7 Influence of abrasion of articulated points D and E on characteristics of mechanism in closing and opening process

操作过程特征量变化趋势 合闸过程C1增大 C2增大 C3不变 C4不变 Dl1减小 C5增大 C6减小 C7减小 Dl2减小 分闸过程O1减小 O2不变 O3减小 Dk减小 O4减小 O5减小
表8 铰接点D、E磨损量与机构合闸过程特征量的关系
Tab.8 Relationship between abrasion of articulated pointsD and E and characteristics of mechanism in closing process

铰接点D、E磨损量0mm0.5mm1mm1.5mm C1/mm34.2734.8835.4936.11 C2/mm30.0430.7431.4532.15 Dl1/mm10.219.508.757.98 C5/mm28.4528.9529.4629.97 C6/mm34.1633.8233.5033.06 C7/mm33.8533.4932.9832.62 Dl2/mm5.485.084.734.27
框架断路器操作机构和触头系统中有三组弹簧,包括储能弹簧、触头弹簧和分闸弹簧。储能弹簧为机构合闸提供全部动力。触头弹簧为动、静触头提供接触压力,同时在分闸过程阶段Ⅰ作为主要分闸动力。分闸弹簧在分闸过程阶段Ⅰ中辅助触头弹簧进行分闸操作,在阶段Ⅱ中单独驱动机构完成分闸操作,并在阶段Ⅲ中将机构拉回至末态位置。框架断路器中只有两根分闸弹簧,任一弹簧断裂都会对机构分闸过程造成较大影响,因此需要分析分闸弹簧断裂对机构特征量和操作性能的影响。
合闸过程中分闸弹簧提供合闸阻力使机构减速,其断裂会使得合闸速度增大、时间减少,但分闸弹簧的劲度系数远小于储能弹簧和触头弹簧,其提供的合闸阻力远小于储能弹簧提供的动力和触头弹簧提供的阻力,因此分闸弹簧断裂对合闸过程的影响较小。同时合闸过程特征量为动静触头接触时刻、机构死区、机构末态三种状态下机构的位移值,而弹簧断裂只对合闸时间和速度造成影响,因此合闸特征量基本不变。
分闸弹簧性能退化会使机构的分闸能量降低,导致分闸速度降低、动触点B在阶段Ⅱ的斜率减小和反弹最大位移减小。框架断路器内部有两根相同的分闸弹簧并联使用,任一弹簧断裂都会导致整体劲度系数降低为原来的一半,进而导致阶段Ⅱ斜率Δk和反弹最大位移O3、O4、O5出现阶跃变化,因此可将上述四个特征量的变化作为分闸弹簧断裂的判据。综上所述,分闸弹簧断裂对框架断路器机构合分闸过程特征量的影响见表9。
表9 分闸弹簧断裂对框架断路器机构合分闸过程特征量的影响
Tab.9 Influence of spring breaking on characteristics of mechanism during closing and opening process
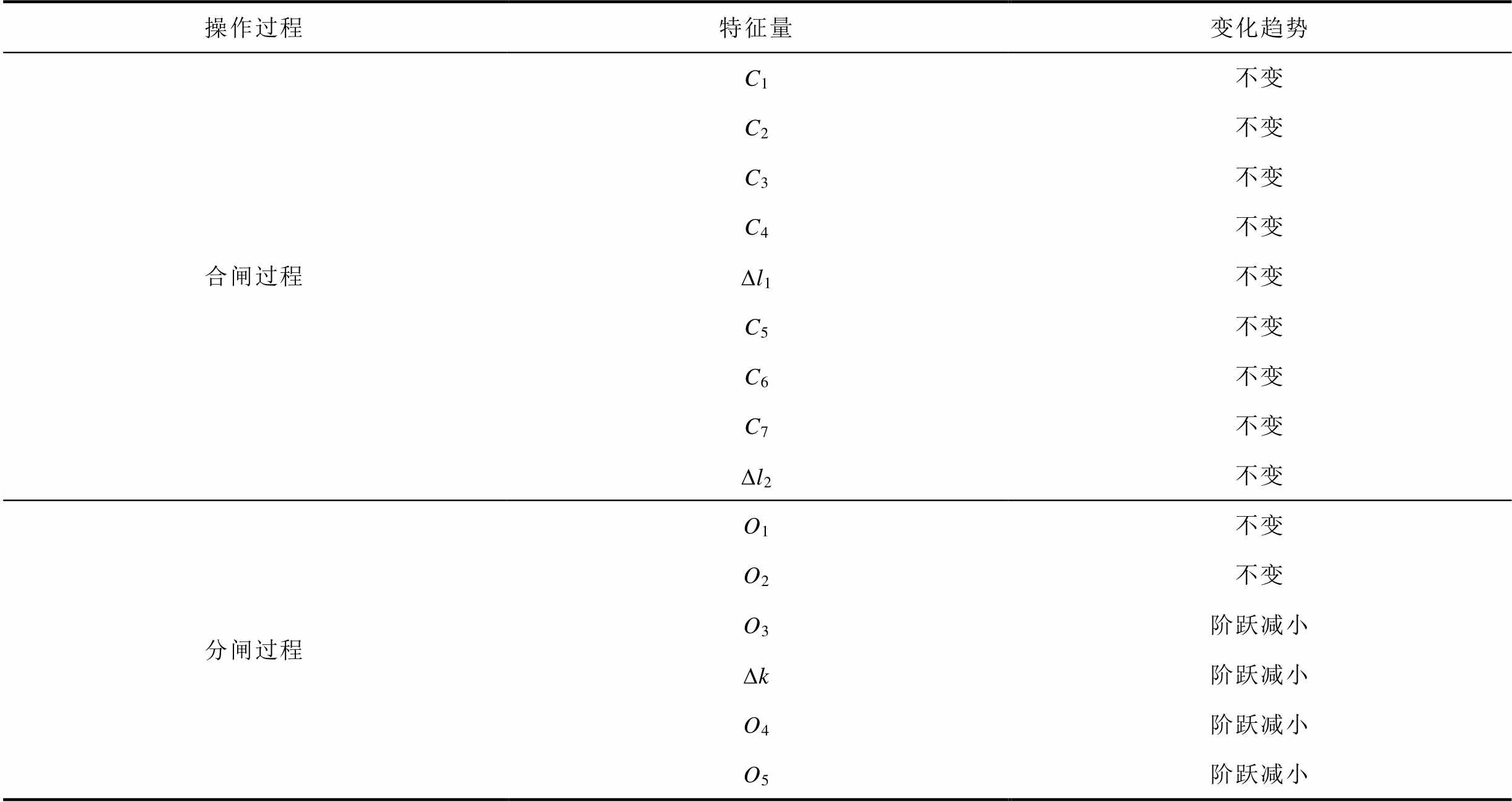
操作过程特征量变化趋势 合闸过程C1不变 C2不变 C3不变 C4不变 Dl1不变 C5不变 C6不变 C7不变 Dl2不变 分闸过程O1不变 O2不变 O3阶跃减小 Dk阶跃减小 O4阶跃减小 O5阶跃减小
综上所述,各部件性能退化对特征量的影响见表10。可以看出各部件性能退化对特征量的影响存在明显差异,基于此可进行性能退化部件和退化程度的诊断。
表10 部件退化对框架断路器机构合分闸过程特征量的影响
Tab.10 Influence of spring breaking on characteristics of mechanism during closing and opening process
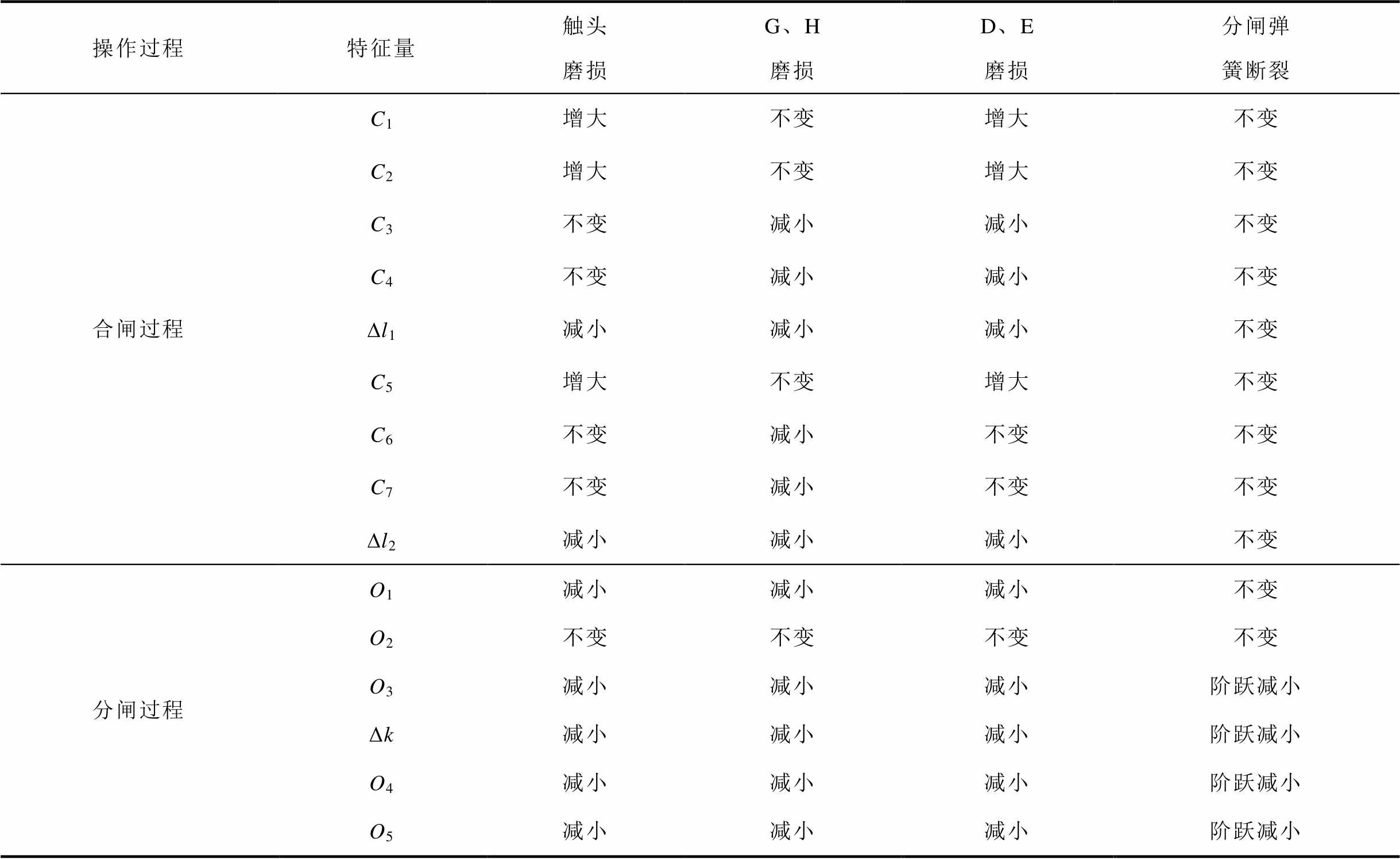
操作过程特征量触头磨损G、H磨损D、E磨损分闸弹簧断裂 合闸过程C1增大不变增大不变 C2增大不变增大不变 C3不变减小减小不变 C4不变减小减小不变 Dl1减小减小减小不变 C5增大不变增大不变 C6不变减小不变不变 C7不变减小不变不变 Dl2减小减小减小不变 分闸过程O1减小减小减小不变 O2不变不变不变不变 O3减小减小减小阶跃减小 Δk减小减小减小阶跃减小 O4减小减小减小阶跃减小 O5减小减小减小阶跃减小
3.1.1 分闸过程阶段Ⅰ能量分析
分闸过程阶段Ⅰ中触头弹簧和分闸弹簧共同驱动机构进行分闸,由于机构行程较短且触头弹簧的劲度系数远大于分闸弹簧,因此在阶段Ⅰ只分析触头弹簧提供的分闸能量。
触头弹簧与电极笼的位置关系如图13所示,触头弹簧与动触头臂的连接处为M,与电极笼的连接处为N,在动、静触头分离前,触头弹簧释放能量驱动电极笼绕着C点转动。
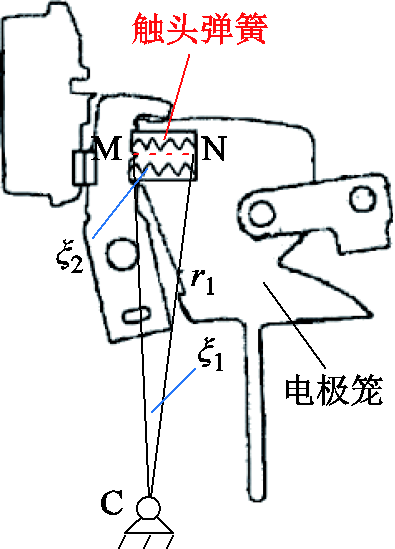
图13 触头弹簧与电极笼位置关系示意图
Fig.13 Position relationship between contact spring and electrode cage
触头弹簧作用在电极笼CD上的动力矩
 (4)
(4)
式中,M1为触头弹簧对C点的动力矩;K1为触头弹簧劲度系数;L1ac为触头弹簧形变量;r1为触头弹簧在电极笼的安装处到C点之间的距离;ξ1为∠MCN;ξ2为∠NMC。
由分析可知机构在阶段Ⅰ为加速运动,在电极笼CD转过任意θ角时,其转动能量为
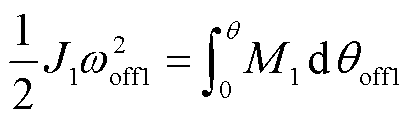 (5)
(5)
式中,J1为动、静触头分离前机构的转动惯量; 为分闸过程中电极笼CD的转动速度。
为分闸过程中电极笼CD的转动速度。
当电极笼CD转动 后,即触头弹簧完全释放,动、静触头分离,由于系统中引入动触头臂CB使得机构质量增大,产生部分能量损失W0,因此,动、静触头分离时刻,电极笼CD的转动能量为
后,即触头弹簧完全释放,动、静触头分离,由于系统中引入动触头臂CB使得机构质量增大,产生部分能量损失W0,因此,动、静触头分离时刻,电极笼CD的转动能量为
 (6)
(6)
 (7)
(7)
 (8)
(8)
式中,J2为动静触头分离后机构的转动惯量; 为动静触头分离时刻电极笼CD的角速度。
为动静触头分离时刻电极笼CD的角速度。
对式(3)求导得出机构传动比(式(9)),并代入动、静触头分离时刻电极笼CD的角速度,求出该时刻曲柄FE的角速度 。
。
 (9)
(9)
式中, 为分闸过程中曲柄FE的角速度;
为分闸过程中曲柄FE的角速度; 、
、 分别为分闸过程中曲柄FE、连杆DE的转动角度。
分别为分闸过程中曲柄FE、连杆DE的转动角度。
3.1.2 分闸过程阶段Ⅱ能量分析
分闸过程阶段Ⅱ中分闸弹簧单独驱动机构进行分闸,分闸弹簧与曲柄的位置关系如图14所示,分闸弹簧释放能量驱动曲柄FG绕着F点转动。
分闸弹簧作用在曲柄FE上的动力矩
 (10)
(10)
式中,M2为分闸弹簧对F点的动力矩;K2为分闸弹簧劲度系数;L2ac为分闸弹簧形变量; 、
、 分别为机构夹角。
分别为机构夹角。
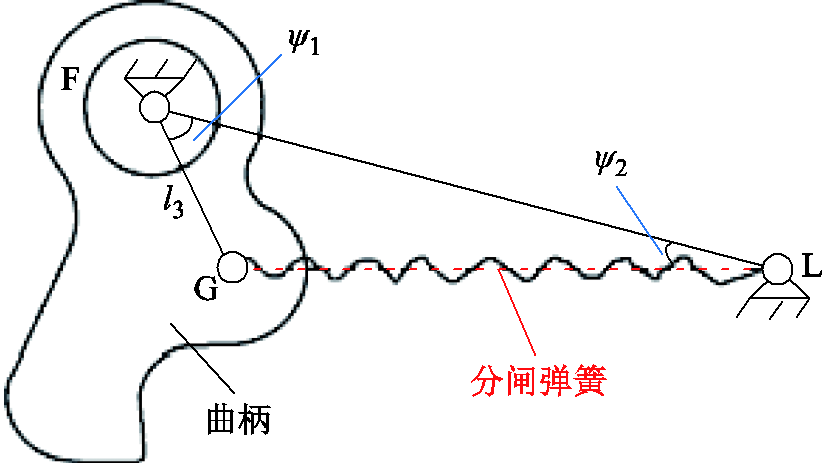
图14 分闸弹簧与曲柄位置关系示意图
Fig.14 Position relationship between opening spring and crank
由分析可知机构在阶段Ⅱ为加速运动,在曲柄FE转过任意角度β时,其转动能量为
 (11)
(11)
式中,J3为动、静触头分离后曲柄转动惯量。
根据式(9)计算动触头臂CB在阶段Ⅱ中的转动速度 ,并计算该阶段持续时间和斜率为
,并计算该阶段持续时间和斜率为
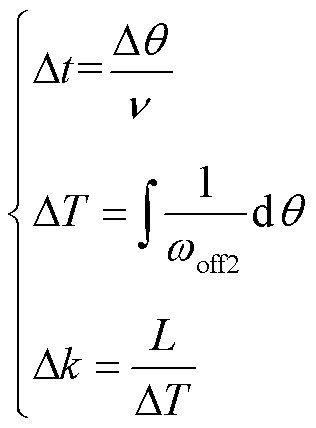 (12)
(12)
式中,Dk为动触点B在阶段Ⅱ的斜率;L为动触点B在阶段Ⅱ的总位移。
由式(11)、式(12)可知,分闸过程动触点B阶段Ⅱ的斜率Dk由机构的分闸能量决定,而分闸能量主要由触头超程决定,且触头磨损、操作机构磨损都会导致触头超程减小,进而导致Dk减小,因此,动触点B在分闸过程阶段Ⅱ的斜率Dk可反映触头超程的状态。根据式(4)、式(8)、式(12)可得出触头超程退化百分比与Dk的关系,如图15所示。可以看出,触头超程减小会导致分闸过程中阶段Ⅱ的斜率Dk明显减小,因此,Dk可有效反映触头超程状态。
分闸弹簧断裂导致分闸过程阶段Ⅱ中的能量降低,根据式(10)~式(12)可得出分闸弹簧性能退化百分比与Dk的关系,如图16所示。可以看出,分闸弹簧性能退化会导致分闸过程中动触点B阶段Ⅱ的斜率Dk减小但变化不明显,分析中只考虑分闸弹簧断裂情况,即性能直接退化50%,该情况会导致Dk阶跃减小,基于此可监测分闸弹簧状态。
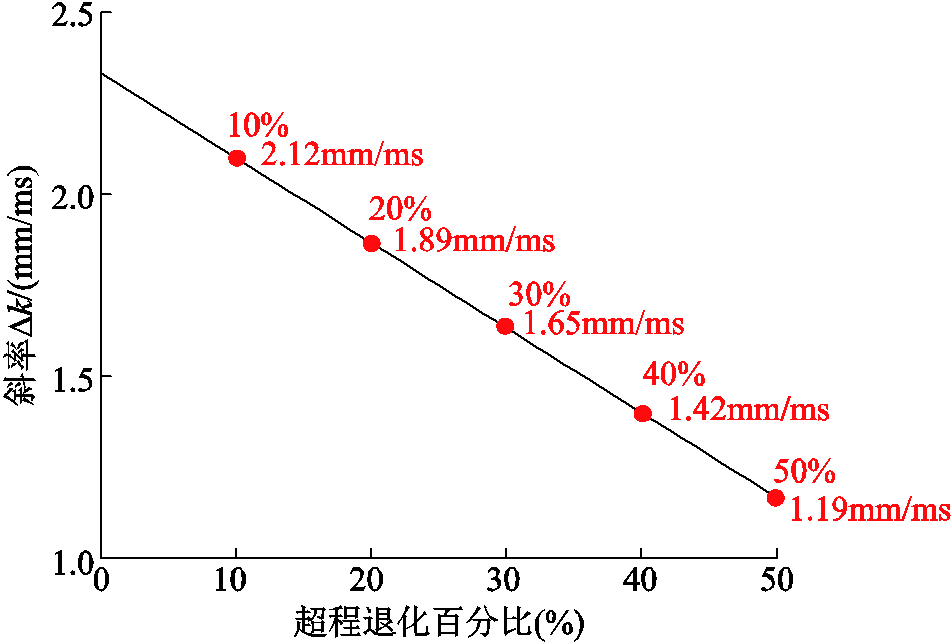
图15 超程退化百分比与Dk的关系
Fig.15 Relationship between overrun degradation percentage and Dk
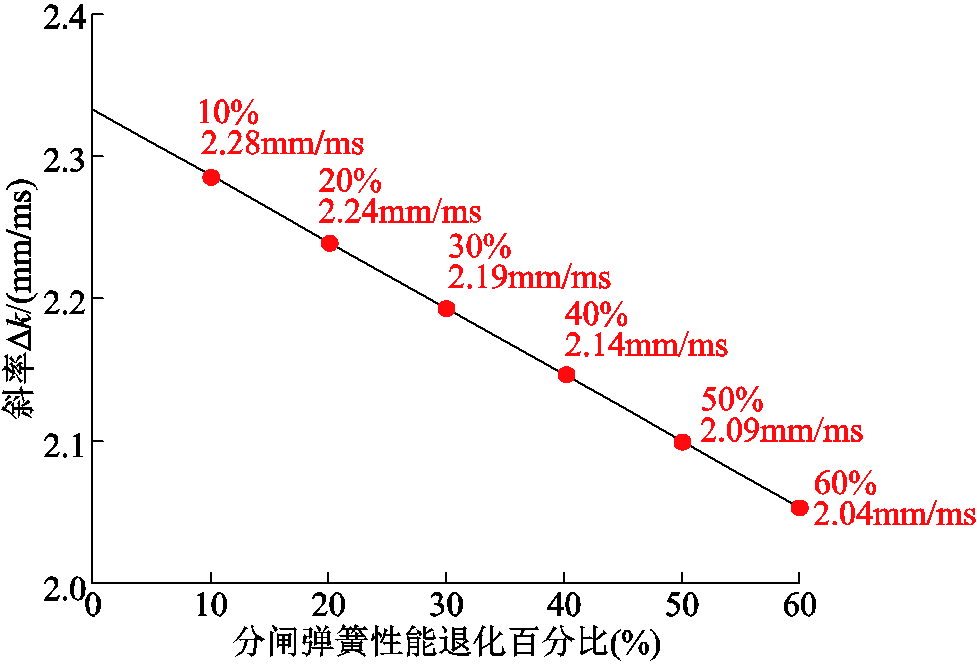
图16 分闸弹簧性能退化百分比与Dk的关系
Fig.16 Relationship between performance degradation percentage of opening spring and Dk
由上述分析可知,触头磨损、操作机构磨损、分闸弹簧断裂都会导致机构运动过程中的特征量发生改变,且对特征量的影响存在差异,因此可通过监测机构运动过程中特征量的变化诊断框架断路器的性能退化部件和退化程度。同时触头磨损、操作机构磨损会使机构超程减少,导致机构分闸能量降低,进而导致框架断路器分闸过程中分闸速度降低和动触点B在分闸过程阶段Ⅱ的斜率Dk减小,因此,可通过监测Dk的变化综合评估框架断路器的超程状态,并根据产品性能要求设定Dk的故障阈值kfault。框架断路器操作性能监测与评估过程如图17所示,具体步骤如下:
(1)根据初始数据调整程序中的参数并依据产品性能要求设定Dk的故障阈值kfault。
(2)采集机构合分闸运动波形,并提取相关特征量。
(3)根据Dk判断框架断路器是否发生故障(分闸弹簧断裂,Dk到达故障阈值),若发生故障则直接报警,若无故障则执行后续操作。
(4)根据C1、C2、C3、C4、C5、C6、C7、Dl1和Dl2其他特征量判断触头和操作机构是否发生磨损,若发生磨损,则给出磨损位置及磨损程度,若无磨损,则执行后续操作。
(5)根据Dk计算触头超程退化量,给出触头超程当前状态。
(6)等待下次合分闸操作,重复步骤(2)~步骤(5)过程。
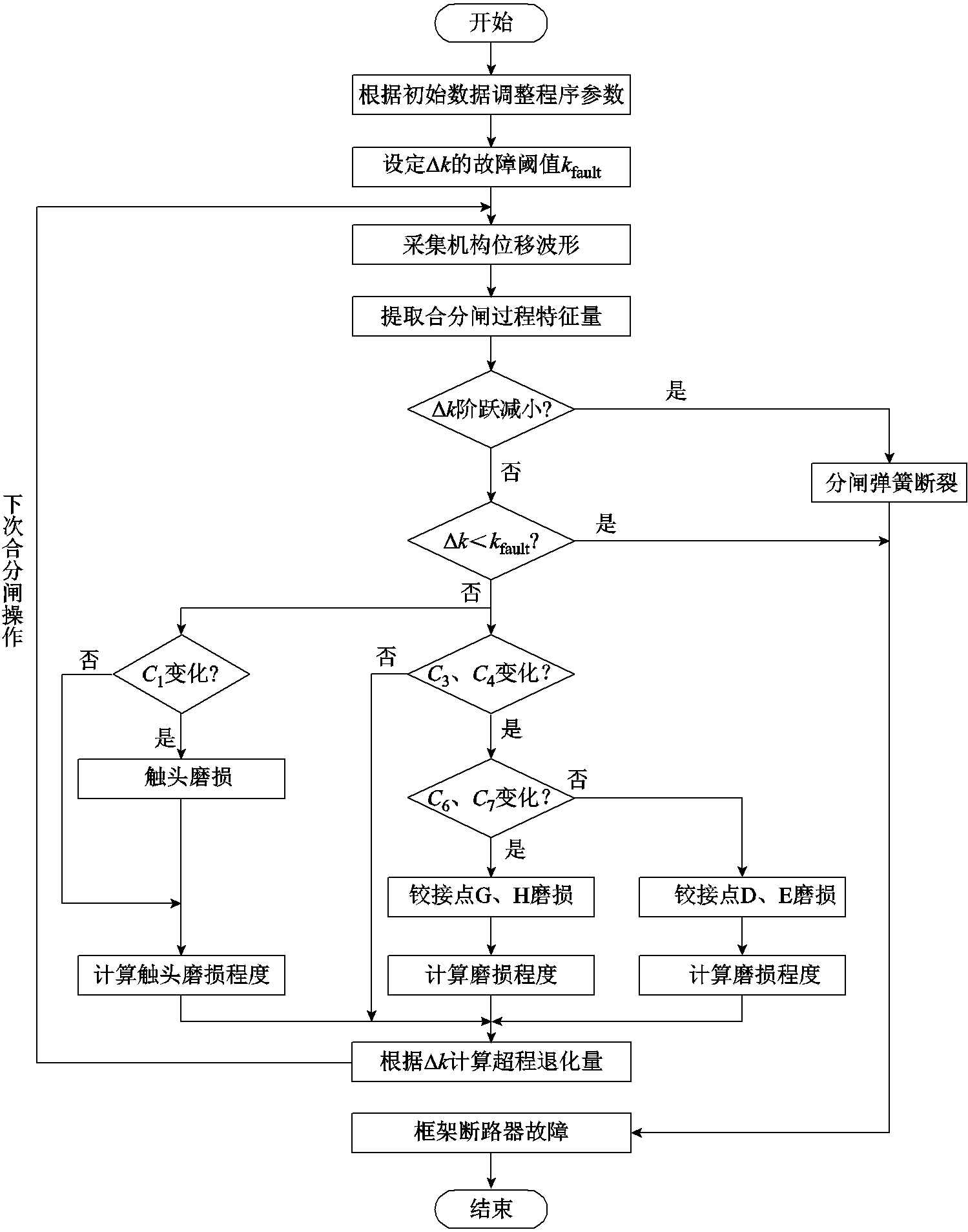
图17 框架断路器操作性能监测与评估过程
Fig.17 Operation performance monitoring and evaluation process of air circuit breaker
图18为实验平台示意图。将框架断路器三相触头分别连上电源和电阻构成三条主回路,位移传感器安装在框架断路器上。使用示波器采集位移信号和A、B、C三相主回路信号。
框架断路器使用寿命较长,难以进行全寿命实验,因此进行模拟验证实验,即人为磨损触头和剪断一根分闸弹簧。首先将三相动触头磨损4mm,其中每磨损1mm采集合分闸特征量。之后剪断一根分闸弹簧并采集合闸分闸特征量。综上所述,共采集六组特征量,即机构完好、触头磨损1mm、触头磨损2mm、触头磨损3mm、触头磨损4mm、一根分闸弹簧断裂,将实验结果与理论分析结果进行对比,验证框架断路器机械特性状态监测方法的正确性和可行性。
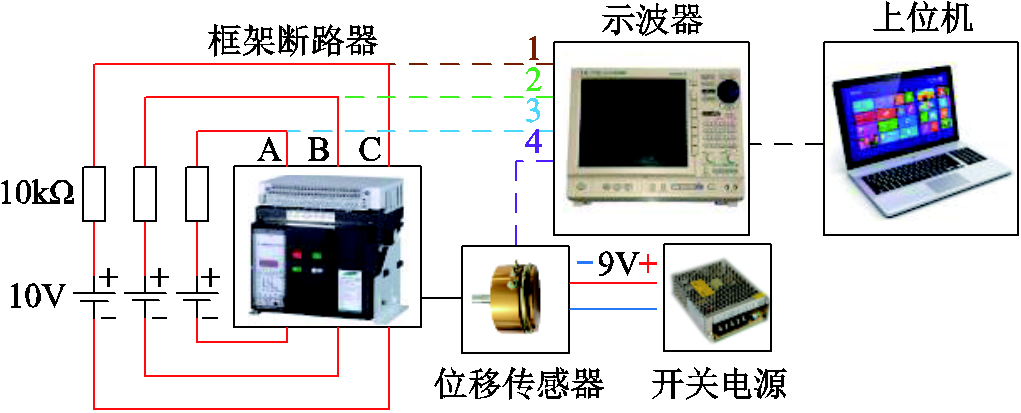
图18 实验平台示意图
Fig.18 Experimental platform
将框架断路器动触头磨损4mm,每磨损1mm采集合分闸特征量,结果见表11。
表11 触头磨损实验结果
Tab.11 Test results of contact abrasion
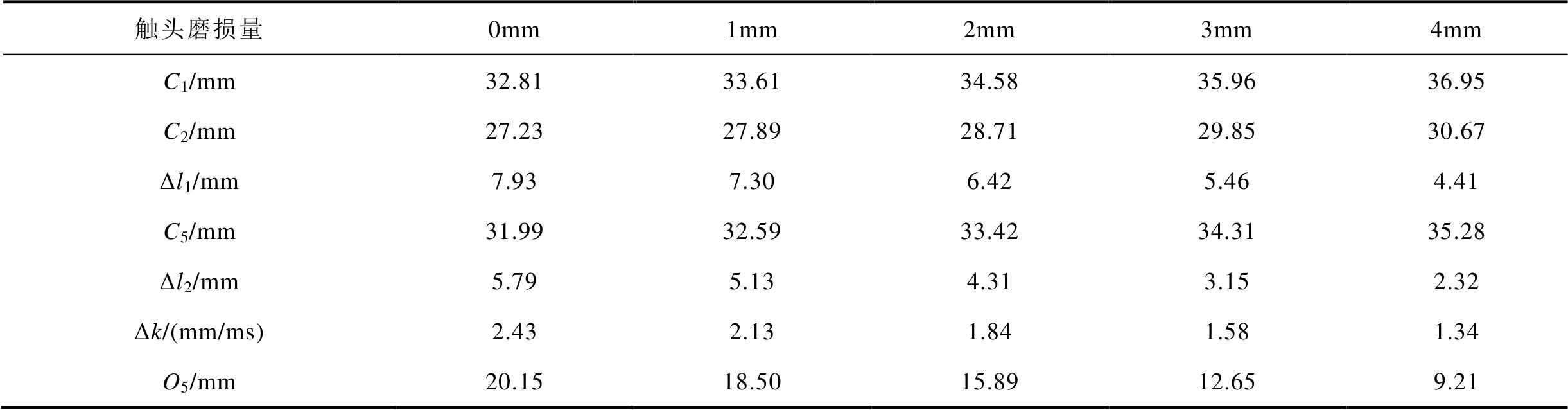
触头磨损量0mm1mm2mm3mm4mm C1/mm32.8133.6134.5835.9636.95 C2/mm27.2327.8928.7129.8530.67 Δl1/mm7.937.306.425.464.41 C5/mm31.9932.5933.4234.3135.28 Δl2/mm5.795.134.313.152.32 Δk/(mm/ms)2.432.131.841.581.34 O5/mm20.1518.5015.8912.659.21
由表11可知,触头磨损会导致合闸初始位置到触头接触时动触点B的位移C1增大、铰接点D的位移C5增大、铰接点E的位移C2增大、铰接点D的超程Dl2减小、铰接点E的超程Dl1减小和分闸过程中动触点B在阶段Ⅱ的斜率Dk减小、铰接点E的反弹最大位移O5减小,与表4和图15所得结果相同,但数值存在差异,这是因为定量计算中构件的尺寸与实际存在差异,实际使用中可根据框架断路器产品型号和初始数据进行调整,减小计算误差。
完成触头磨损4mm实验后,拆除一根分闸弹簧模拟其断裂,其结果见表12。
表12 分闸弹簧断裂实验结果
Tab.12 Test results of opening spring breaking

参数触头磨损4mm 分闸弹簧完好分闸弹簧断裂1根 Dk/(mm/ms)1.341.29 O5/mm9.218.18
由表12可知,分闸弹簧断裂会导致分闸过程中动触点B在阶段Ⅱ的斜率Dk和铰接点E的反弹最大位移O5阶跃减小,与图16所得结果相同,但数值存在差异,验证了理论分析的正确性和所提方法的可行性。
本文提出了一种基于操作机构运动特性的机械特性状态监测方法。分析不同机械部件性能退化对框架断路器操作性能的影响机制,选取了可监测不同机构部件性能退化的特征量,并根据分闸能量变化完成断路器触头超程状态的监测。主要结论如下:
1)框架断路器机械部件和触头超程发生性能退化时会导致操作机构的运动规律发生改变,根据操作机构运动特性,可选取机构合、分闸过程中的特征量,能够有效地反映机械部件和触头超程的状态。
2)根据合分闸过程中操作机构各部件间的运动关系,能够定量计算触头磨损、操作机构磨损和分闸弹簧断裂对机构运动波形中特征量的影响,通过实时监测特征量的变化,实现框架断路器性能退化部件和退化程度的诊断。
3)根据操作机构分闸过程中的能量关系,能够定量计算触头超程性能退化对分闸能量和分闸阶段斜率的影响,通过实时监测斜率的变化,完成框架断路器触头超程状态的监测以及操作性能的评估。
参考文献
[1] 孙曙光, 张强, 杜太行, 等. 基于分合闸线圈电流的万能式断路器故障诊断[J]. 仪器仪表学报, 2018, 39(2): 130-140.
Sun Shuguang, Zhang Qiang, Du Taihang, et al. Fault diagnosis for conventional circuit breaker based on switching coil current[J]. Chinese Journal of Scientific Instrument, 2018, 39(2): 130-140.
[2] Zhao Heng, Xiao Xianyong, Sun Qiuqin. Identifying electric shock in the human body via α dispersion[J]. IEEE Transactions on Power Delivery, 2018, 33(3): 1107-1114.
[3] 孙曙光, 张伟, 王景芹, 等. 基于动作过程振动检测的低压断路器机械寿命预测[J]. 仪器仪表学报, 2020, 41(12): 146-157.
Sun Shuguang, Zhang Wei, Wang Jingqin, et al. Mechanical life prediction of low-voltage circuit breaker based on vibration detection during operation[J]. Chinese Journal of Scientific Instrument, 2020, 41(12): 146-157.
[4] 袁佳歆, 张哲维, 周航, 等. 永磁饱和型高压直流限流器参数优化设计[J]. 电力系统自动化, 2020, 44(13): 135-142.
Yuan Jiaxin, Zhang Zhewei, Zhou Hang, et al. Optimal design of parameters for high voltage DC fault current limiter with permanent-magnet-biased saturation[J]. Automation of Electric Power Systems, 2020, 44(13): 135-142.
[5] 李国庆, 宋禹衡, 王利猛, 等. 基于电压钳位原理的多端口限流式直流断路器[J]. 电力系统自动化, 2021, 45(18): 170-178.
Li Guoqing, Song Yuheng, Wang Limeng, et al. Multi-port current limiting DC circuit breaker based on voltage clamp principle[J]. Automation of Electric Power Systems, 2021, 45(18): 170-178.
[6] Bian Chunyuan, Liu Shangyue, Xing Haiyang, et al. Research on fault-tolerant operation strategy of rectifier of square wave motor in wind power system[J]. China Electrotechnical Society Transactions on Electrical Machines and Systems, 2021, 5(1): 62-69.
[7] 赵书涛, 吴成坚, 李明, 等. 基于NCC-P-S优化算法的断路器机械特性测试方法研究[J]. 中国电机工程学报, 2017, 37(14): 4265-4271, 4306.
Zhao Shutao, Wu Chengjian, Li Ming, et al. Research of circuit breaker mechanical characteristic test method based on normalized cross correlation-pyramid-sector optimization algorithm[J]. Proceedings of the CSEE, 2017, 37(14): 4265-4271, 4306.
[8] 刘艳, 陈丽安. 基于SOM的真空断路器机械故障诊断[J]. 电工技术学报, 2017, 32(5): 49-54.
Liu Yan, Chen Lian. Mechanical fault diagnosis of vacuum circuit breaker based on SOM[J]. Transactions of China Electrotechnical Society, 2017, 32(5): 49-54.
[9] 彭诗怡, 刘衍, 周涛涛, 等. 基于操作力矩的高压隔离开关机械缺陷智能诊断[J]. 电工技术学报, 2021, 36(7): 1356-1367.
Peng Shiyi, Liu Yan, Zhuo Taotao, et al. Intelligent diagnosis technology of mechanical defects of high voltage disconnector[J]. Transactions of China Electrotechnical Society, 2021, 36(7): 1356-1367.
[10] 付饶, 梁慧敏, 叶雪荣, 等. 接触器触点超程分析及其退化状态的诊断[J]. 电工技术学报, 2020, 35(1): 125-133.
Fu Rao, Liang Huimin, Ye Xuerong, et al. Analysis of the contact overtravel of contactor and its degradation state evaluation[J]. Transactions of China Electrotechnical Society, 2020, 35(1): 125-133.
[11] 彭庭康. 低压断路器健康状态监测和故障诊断研究[D]. 武汉: 湖北工业大学, 2020.
[12] 张佳, 陈志英, 陈丽安, 等. 基于粒子群优化极限学习机的断路器故障诊断方法研究[J]. 高压电器, 2020, 56(6): 181-188.
Zhang Jia, Chen Zhiying, Chen Lian, et al. Research on fault diagnosis of circuit breaker based on particle swarm optimization extreme learning machine[J]. High Voltage Apparatus, 2020, 56(6): 181-188.
[13] 梅飞, 梅军, 郑建勇, 等. 粒子群优化的KFCM及SVM诊断模型在断路器故障诊断中的应用[J]. 中国电机工程学报, 2013, 33(36): 134-141, 19.
Mei Fei, Mei Jun, Zheng Jianyong, et al. Application of particle swarm fused KFCM and classification model of SVM for fault diagnosis of circuit breaker[J]. Proceedings of the CSEE, 2013, 33(36): 134-141, 19.
[14] Ni Jianjun, Zhang Chuanbiao,Yang S X. An adaptive approach based on KPCA and SVM for real-time fault diagnosis of HVCBs[J]. IEEE Transactions on Power Delivery, 2011, 26(3): 960-1971.
[15] 孙曙光, 李勤, 杜太行, 等. 基于一维卷积神经网络的低压万能式断路器附件故障诊断[J]. 电工技术学报, 2020, 35(12): 2562-2573.
Sun Shuguang, Li Qin, Du Taihang, et al. Fault diagnosis of accessories for the low voltage conventional circuit breaker based on one-dimensional convolutional neural network[J]. Transactions of China Electrotechnical Society, 2020, 35(12): 2562-2573.
[16] 谭佳明, 叶奕君, 李国玉, 等. 基于振动信号的交流中压真空断路器故障诊断技术研究[J]. 高压电器, 2019, 55(11): 218-226.
Tan Jiaming, Ye Yijun, Li Guoyu, et al. Fault diagnosis technology of AC medium⁃voltage vacuum circuit breaker based on vibration signal[J]. High Voltage Apparatus, 2019, 55(1): 218-226.
[17] 杨秋玉, 王栋, 阮江军, 等. 基于振动信号的断路器机械零部件故障程度识别[J]. 电工技术学报, 2021, 36(13): 2880-2892.
Yang Qiuyu, Wang Dong, Ruan Jiangjun, et al. Fault severity estimation method for mechanical parts in circuit breakers based on vibration analysis[J]. Transactions of China Electrotechnical Society, 2021, 36(13): 2880-2892.
[18] 万书亭, 马晓棣, 陈磊, 等. 基于振动信号短时能熵比与DTW的高压断路器状态评估及故障诊断[J]. 高电压技术, 2020, 46(12): 4249-4257.
Wan Shuting, Ma Xiaodi, Chen Lei, et al. State evaluation and fault diagnosis of high-voltage circuit breaker based on short-time energy entropy ratio of vibration signal and DTW[J]. High Voltage Engineering, 2020, 46(12): 4249-4257.
[19] Yang Qiuyu, Ruan Jiangjun, Zhuang Zhijian, et al. Chaotic analysis and feature extraction of vibration signals from power circuit breakers[J]. IEEE Transactions on Power Delivery, 2020, 35(3): 1124-1135.
[20] Razi-Kazemi A A, Niayesh K, Nilchi R. A probabilistic model-aided failure prediction approach for spring-type operating mechanism of high-voltage circuit breakers[J]. IEEE Transactions on Power Delivery, 2019, 34(4): 1280-1290.
[21] 姚杨, 林金涛, 刘洪正, 等. 基于复合特征的断路器机械故障诊断方法研究[J]. 中国电机工程学报, 2019, 39(21): 6439-6452.
Yao Yang, Lin Jintao, Liu Hongzheng, et al. Research on mechanical fault diagnosis of circuit breakers based on hybrid features[J]. Proceedings of the CSEE, 2019, 39 (21): 6439-6452.
[22] 陈欣昌, 冯玎, 林圣. 基于深度自编码网络的高压断路器操作机构机械故障诊断方法[J]. 高电压技术, 2020, 46(9): 3080-3088.
Chen Xinchang, Feng Ding, Lin Sheng. Mechanical fault diagnosis method of high voltage circuit breaker operating mechanism based on deep auto-encoder network[J]. High Voltage Engineering, 2020, 46(9): 3080-3088.
[23] 杨秋玉, 阮江军, 张灿, 等. 基于定量递归分析的高压断路器机械缺陷辨识及应用[J]. 电工技术学报, 2020, 35(18): 3848-3859.
Yang Qiuyu, Ruan Jiangjun, Zhang Can, et al. Study and application of mechanical defect identification for high-voltage circuit breakers using recurrence quantification analysis[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3848-3859.
[24] 杨元威, 关永刚, 陈士刚, 等. 基于声音信号的高压断路器机械故障诊断方法[J]. 中国电机工程学报, 2018, 38(22): 6730-6737.
Yang Yuanwei, Guan Yonggang, Chen Shigang, et al. Mechanical fault diagnosis method of high voltage circuit breaker based on sound signal[J]. Proceedings of the CSEE, 2018, 38(22): 6730-6737.
[25] 赵书涛, 李沐峰, 王亚潇, 等. 断路器操动状态声音辨识的优化算法的研究[J]. 电测与仪表, 2017, 54(10): 26-31.
Zhao Shutao, Li Mufeng, Wang Yaxiao, et al. Research of optimization algorithm for sound signal recognition of circuit breaker operating state[J]. Electrical Measurement & Instrumentation, 2017, 54(10): 26-31.
[26] 杨秋玉, 阮江军, 黄道春, 等. 基于振动信号的高压断路器触头超程状态识别[J]. 电机与控制学报, 2019, 23(6): 27-34.
Yang Qiuyu, Ruan Jiangjun, Huang Danchun, et al. Over-travel state identification for electrical contact of high-voltage circuit breaker using vibration signature[J]. Electric Machines and Control, 2019, 23(6): 27-34.
[27] 杨秋玉, 阮江军, 黄道春, 等. 基于改进Hilbert-Huang变换和支持向量机的高压断路器触头超程状态识别[J]. 电力自动化设备, 2019, 39(1): 198-204.
Yang Qiuyu, Ruan Jiangjun, Huang Danchun, et al. Over-travel detection of electrical contact for high-voltage circuit breaker based on improved HHT and SVM[J]. Electric Power Automation Equipment, 2019, 39(1): 198-204.
Research on Condition Monitoring Method of Mechanical Characteristics of Low-Voltage Circuit Breaker
Abstract As an important protective device in low-voltage distribution system, low-voltage circuit breaker is mainly used to cut off and connect load circuit and cut off fault circuit to ensure the system safe operation. The reliable operation of its internal mechanical components is very important to the operating performance of the low-voltage circuit breaker. With the increase of the number of operations, the mechanical characteristics of the circuit breaker gradually deteriorate, and eventually destroy the normal movement of the operating mechanism, and then cause the failure of closing and opening, and even affect the distribution system. In order to accurately monitor the mechanical characteristics of low-voltage circuit breaker, a condition monitoring method for mechanical characteristics of low-voltage circuit breaker based on the motion characteristics of operating mechanism is proposed. Firstly, according to the motion characteristics of the operating mechanism, the rotation characteristics of mechanism in the process of closing and opening are analyzed, and the characteristics that can reflect the performance of the operating mechanism are selected. Secondly, the effects of contact abrasion, mechanism abrasion and opening spring fracture on the performance of the mechanism are quantitatively analyzed, and the performance monitoring and diagnosis of mechanical parts are realized by monitoring the changes of characteristic quantities in real time. Finally, the influence of contact over-travel performance degradation on opening energy and mechanism performance is quantitatively calculated to realize the monitoring of contact overtravel state. The experimental results show that the proposed method can effectively monitor the state information of the mechanical components of low-voltage circuit breaker, realize the accurate evaluation of the contact overrange state, and provide a new method for the monitoring and diagnosis of the mechanical characteristics of low-voltage circuit breaker.
keywords:Low-voltage circuit breaker, mechanical components, operating mechanism, contact over-travel, condition monitoring
DOI:10.19595/j.cnki.1000-6753.tces.211497
中图分类号:TM561
胡博凯 男,1995年生,博士研究生,研究方向为开关设备可靠性理论及应用。E-mail:hubokai0906@163.com
牛 峰 男,1986年生,教授,博士生导师,研究方向为电机系统及其控制。E-mail:niufeng@hebut.edu.cn(通信作者)
收稿日期 2021-09-22
改稿日期 2021-11-30
国家自然科学基金(51937004, 51777056)和河北省自然科学基金(E2019202124, E2020202142)资助项目。
(编辑 郭丽军)