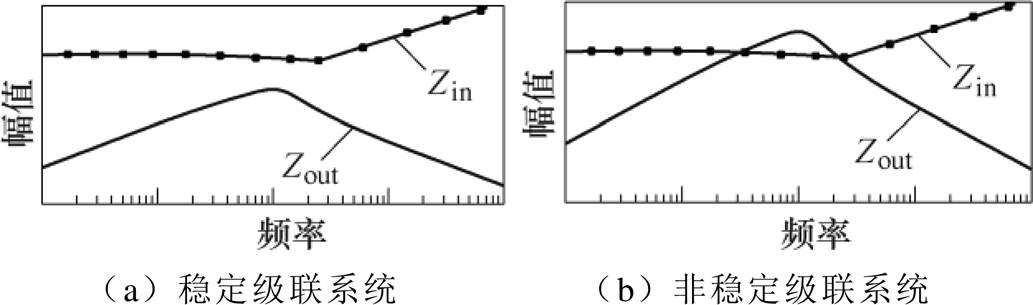
图1 典型稳定系统与非稳定系统伯德
Fig.1 Bode plot of typical stable and unstable system
摘要 现代船舶电动吊机广泛采用双侧脉宽调制交直交调速系统,但因其直流母线使用大容量电解电容使得系统不宜集成化且维修困难。该文在对系统小信号建模的基础上,提出一种采用小容量电容的控制策略。首先分析直流母线采用小电容时系统失稳原因,而后设计直流母线电压前馈补偿、d轴电流前馈补偿环节提高系统稳定性和带载能力,并结合二者优点得到小电容双PWM调速系统控制策略。以永磁同步电机作为负载的仿真和实验表明,该策略能保证系统稳定运行,可抑制转矩突变及脉动时的直流母线电压波动,对电网谐波注入较少且参数设计方法具有普适性。
关键词:双PWM调速 小信号建模 小电容 前馈补偿 抑制直流母线电压波动
现代船舶电动吊机广泛采用双脉宽调制(Dual Pulse Width Modulation, Dual-PWM)调速系统,其电能双向流动能力使其迅速替代了传统相控调速系统,而双PWM调速系统在负载侧电机功率突变或波动时会引起直流母线电压波动、电网电压闪变等问题[1]。为抑制直流母线电压波动,通常会采取直流母线并联大容量电解电容的办法缓存整流侧与逆变侧能量差,但这会使系统成本升高且不宜集成与维修[2]。如何减小直流母线电容容量成为国内外研究热点[3]。
调速系统的直流电压波动DV往往被限定在标称电压的百分之几以下[4],因此直流母线电容缓存整流侧与逆变侧能量差DE=CVdcDV很小,所以大容量电解电容在双PWM调速系统使用效率很低。但若直接减小电容容量不仅会导致负载突变时直流电压出现较大超调,同时在负载转矩振荡时母线电压也会随之振荡,这不仅会影响共母线上的精密仪器,也会向电网中注入较高的谐波[5]。为了在使用小电容的同时也保证直流母线电压稳定,国内外学者做了许多的工作,主要可以分为三个方面:①将负载侧信息前馈到整流侧由独立控制变为协调控制[6-10];②以Nyquist、Middlebrook、Wildrick等稳定性判据为基础重构输入输出阻抗解决输入输出阻抗不匹配而造成系统失稳的问题[11-13];③并联小功率辅助电路使系统能量有额外的储存路径[14-17]。文献[6]提出了一种结合自抗扰和负载功率前馈的控制策略,该策略能有效抑制直流母线电压波动,并且提高整流前级的自抗扰能力。文献[7]提出了一种双侧预测控制与功率前馈结合的办法,对逆变侧所需功率进行实时补偿,抑制了负载突变时的电压波动。文献[8-10]从直流母线能量平衡角度出发,分析其直流电压不稳定的原因,并将多个前馈信息引入到整流侧电流环上,实现了多端口同时工作时的功率平衡。文献[11]从改变负载输入阻抗和增强系统稳定性角度出发,设计含有比例补偿器的小电容系统,具有较强稳定性。文献[12]改变了整流前级输出阻抗,将补偿信号注入PWM整流器的电压外环中,利用有源阻尼补偿的方法保证了直流母线的稳定性。文献[13]通过对电容电流的直接控制,保证了整流侧的输出电流与逆变侧输入电流平衡,提高了系统动态性能。文献[14]设计了即插即用的虚拟无穷大电容,使得直流母线阻抗在高频或低频时具有较高的阻抗,能抑制直流母线电压随机波动。文献[15]设计了具有能量储存功能的附加电路,保证直流母线电压稳定的同时有效地降低了电容容量。文献[16]根据系统的不稳定程度,设计了具有通用性的自适应有源电容变换器,提高了系统稳定性。
本文在对双PWM调速系统进行小信号建模的基础上,以Middlebrook稳定性判据为依据,设计电压前馈补偿环节,改变了整流前级的输入阻抗,同时提升系统级联稳定性,设计d轴电流前馈补偿环节提升小电容整流前级的带载能力,随后结合二者优点提出复合阻抗补偿方案,使小电容双PWM调速系统具有较强带载能力的同时又有较高的稳定性。该方法无需附加电路,易于实现,参数设计方法具有普适性。最后通过搭建小电容双PWM调速系统的仿真及实验平台对所提策略进行验证。
Middlebrook教授提出单独稳定运行的系统级联后可能由于相互作用失去稳定性,但若前级输出阻抗Zout的模在全频率范围内小于后级阻抗的输入阻抗Zin的模,则该级联系统稳定[17]。图1为Middlebrook稳定性判据典型稳定系统、非稳定系统幅频特性 曲线。
图1 典型稳定系统与非稳定系统伯德
Fig.1 Bode plot of typical stable and unstable system
现代船舶电动吊机广泛采用双PWM调速系统即典型的级联系统,其拓扑如图2所示,该系统采用整流单元作为前级,逆变单元驱动永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)作为后级。
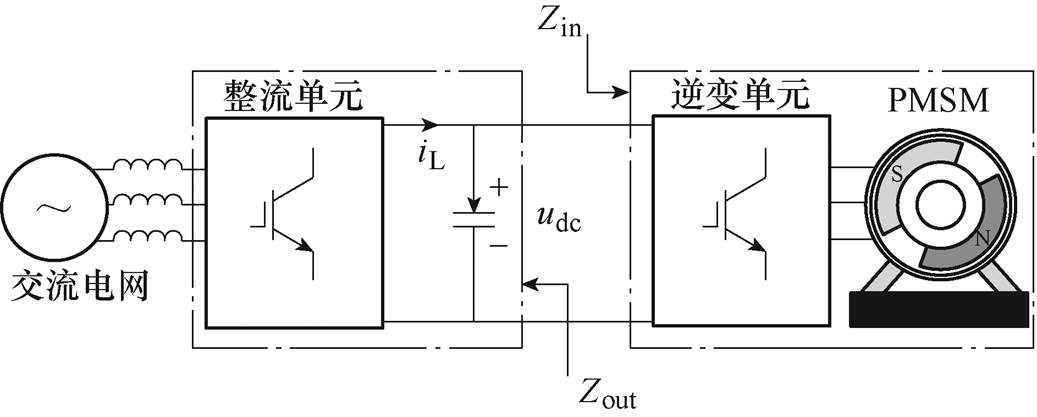
图2 双PWM调速系统
Fig.2 Dual-PWM speed regulation system
图2中,iL为整流侧负载电流;udc为直流母线电压;Zout为整流单元输出阻抗;Zin为逆变单元输入阻抗。为了研究该系统的级联稳定性,后文将对整流前级三相VSR的输出阻抗Zout进行精确推导并研究各个参数和补偿策略对Zout的影响。逆变侧输入阻抗Zin采用文献[18]中推导模型,本文不做具体推导。
三相PWM电压源型整流器(Voltage Source Rectifier, VSR)拓扑如图3所示,图中,eg为电网电压,Lg为电感,Rg为传输电阻,C为电容。
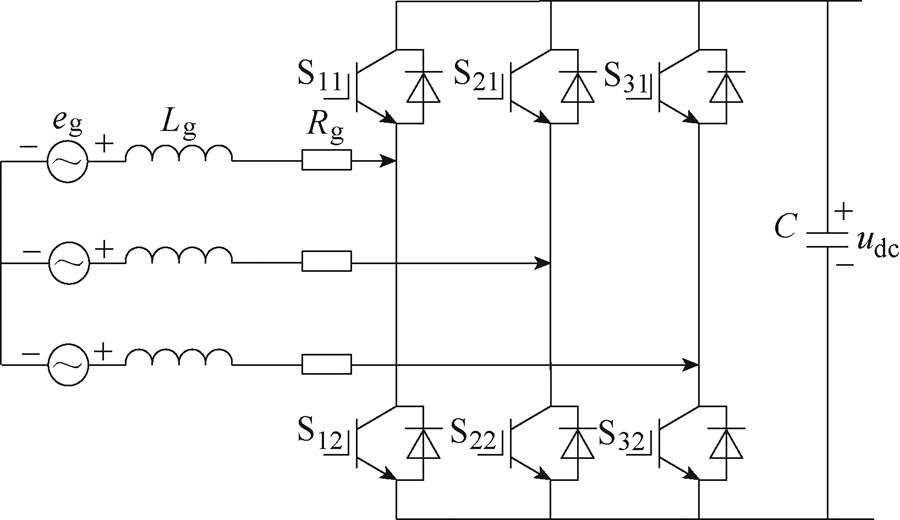
图3 三相PWM电压源型整流器拓扑
Fig.3 Topology of three-phase PWM voltage source rectifier
三相VSR在dq坐标系下的模型为
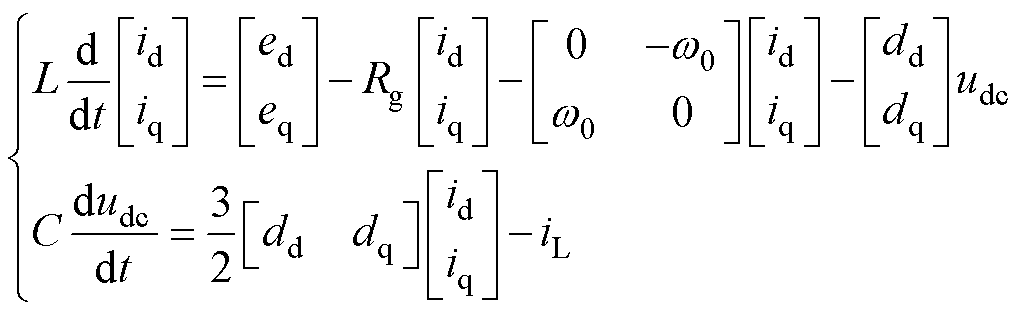 (1)
(1)
式中,id、iq分别为d、q坐标系下电流;ed、eq分别为d、q坐标系下电压;dd、dq分别为d、q坐标系下占空比;w0为电网角频率。由式(1)知,dq轴模型中存在耦合,因此电流环采用前馈解耦,即
 (2)
(2)
式中,令 、
、 、
、
 、
、 ,由此式(2)将占空比分为两部分:第一部分为控制占空比dd1、dq1;第二部分为解耦占空比dd2、dq2。三相VSR运行过程中处于单位功率因数状态[19],即认为iq≈0,因此将式(2)代入式(1)中得到
,由此式(2)将占空比分为两部分:第一部分为控制占空比dd1、dq1;第二部分为解耦占空比dd2、dq2。三相VSR运行过程中处于单位功率因数状态[19],即认为iq≈0,因此将式(2)代入式(1)中得到
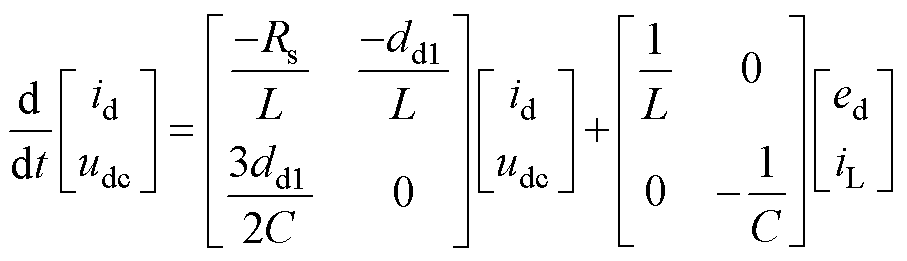 (3)
(3)
为研究三相VSR小信号模型,对电网电压ed、负载电流iL、控制占空比dd1施加小信号扰动,得到的扰动量用“ ”表示,其稳态量用Ed、IL、Dd1表示。母线电压udc、d轴电流id的小信号响应为
”表示,其稳态量用Ed、IL、Dd1表示。母线电压udc、d轴电流id的小信号响应为 、
、 ,其稳态量为Udc、Id,分别将稳态量、扰动量代入式(3)得三相VSR稳态方程和扰动方程分别为
,其稳态量为Udc、Id,分别将稳态量、扰动量代入式(3)得三相VSR稳态方程和扰动方程分别为
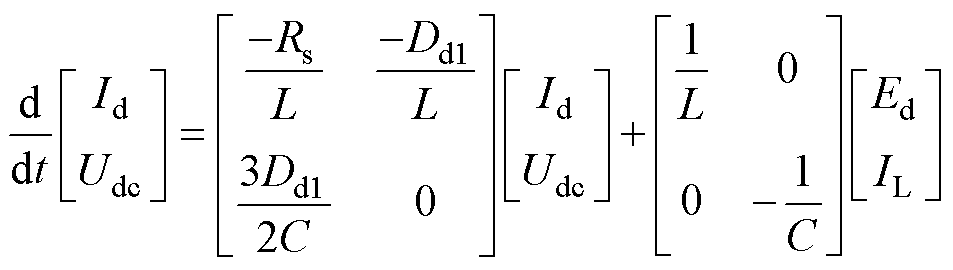 (4)
(4)
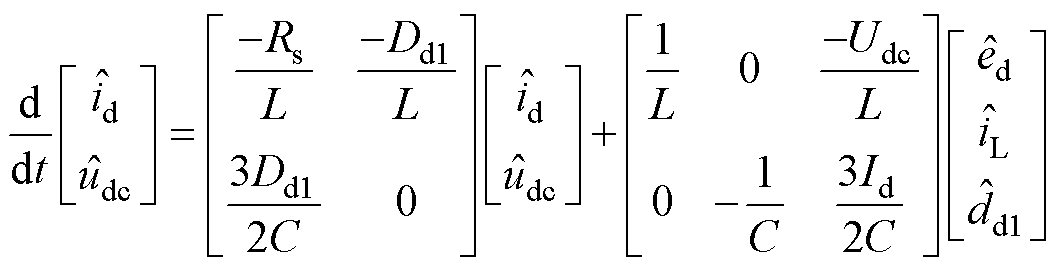 (5)
(5)
依据拉普拉斯变换得到三相VSR开环传递函数如式(6)所示,其值详见附录。
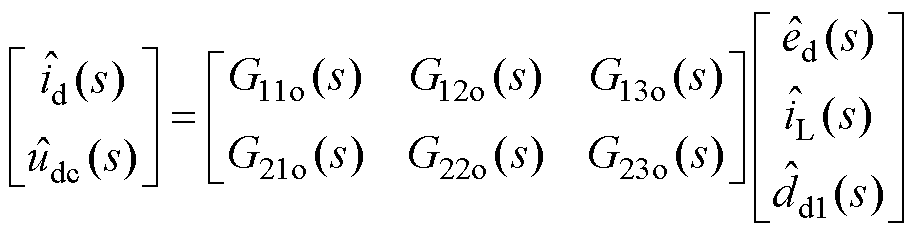 (6)
(6)
当三相VSR采用电压定向控制时,d轴分量控制框图如图4所示。
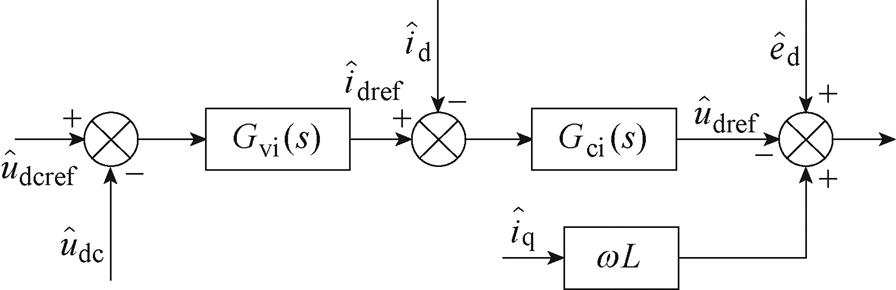
图4 电压定向控制时d轴分量控制框图
Fig.4 d-axis component of VOC control methed
图4中,Gvi(s)、Gci(s)为电压环、电流环PI调节器,当三相VSR运行于稳定状态且功率因数为1时,电压外环无静差,可近似认为直流侧输出功率均来自d轴分量,则控制占空比 可以表示为
可以表示为
 (7)
(7)
将1.2节中推导的三相VSR开环模型与电压电流控制拓扑相结合得到三相VSR闭环小信号控制框图如图5所示。
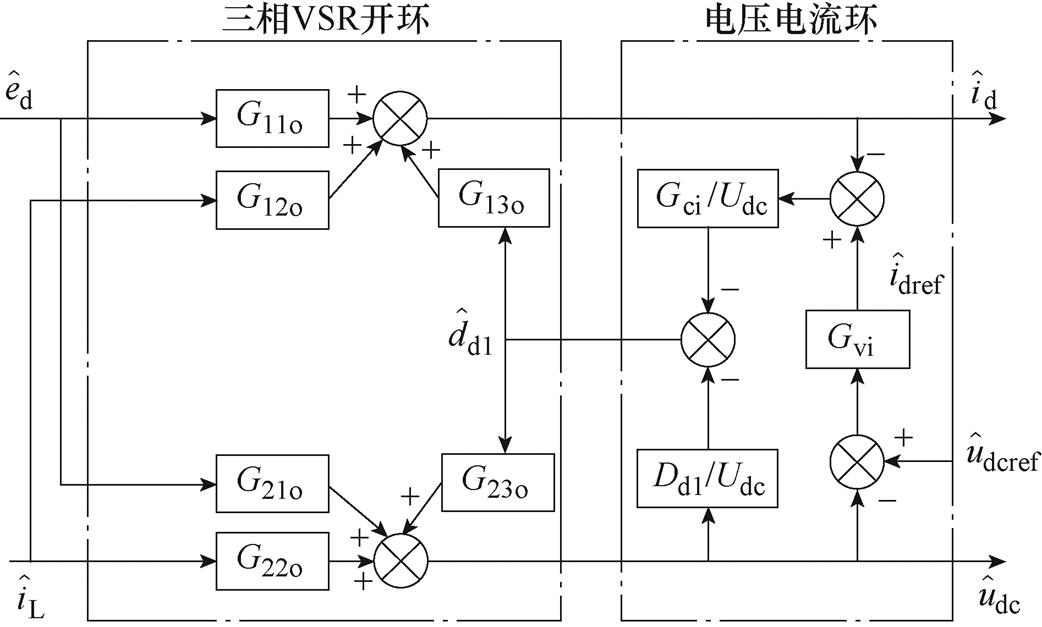
图5 三相VSR闭环小信号控制框图
Fig.5 The small-signial closed loop control block of three-phase voltage source rectifier
由图5知,该系统共有3个闭合回路传递函数l1、l2、l3,分别为
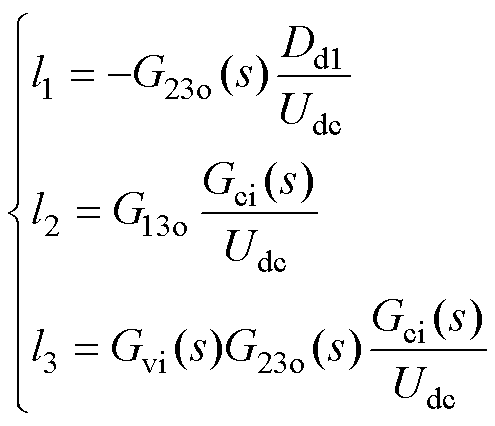 (8)
(8)
由 至共有2个前向通道记为n1、n2,分别表示为
至共有2个前向通道记为n1、n2,分别表示为
 (9)
(9)
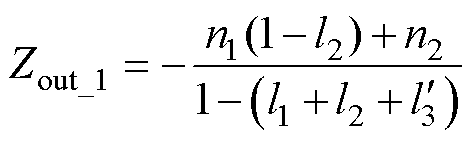
结合图1、图5知,三相VSR输出阻抗为Zout=  ,利用梅森公式得三相VSR的输出阻抗为
,利用梅森公式得三相VSR的输出阻抗为
 (10)
(10)
由1.1节知,三相VSR闭环输出阻抗Zout影响系统的稳定性,而由式(10)可知,不同的直流电容、负载电流都有不同的Zout,将50mF、100mF、200mF 3个电容值代入式(10),并画出不同电容下三相VSR输出阻抗幅值曲线如图6a所示,将直流电流iL=5A、8A、10A代入式(10),并画出不同负载电流下三相VSR输出阻抗幅值曲线如图6b所示。
由图6知,母线电容越小或负载电流越大时,三相VSR输出阻抗幅值越大,越易与逆变侧输入阻抗相交使系统失去稳定性。所以直接减小双PWM调速系统电容值不仅会使系统稳定性降低还会使系统带载能力下降,为解决该问题下文将提出一种在使用小电容时的双PWM调速系统稳定运行的策略。
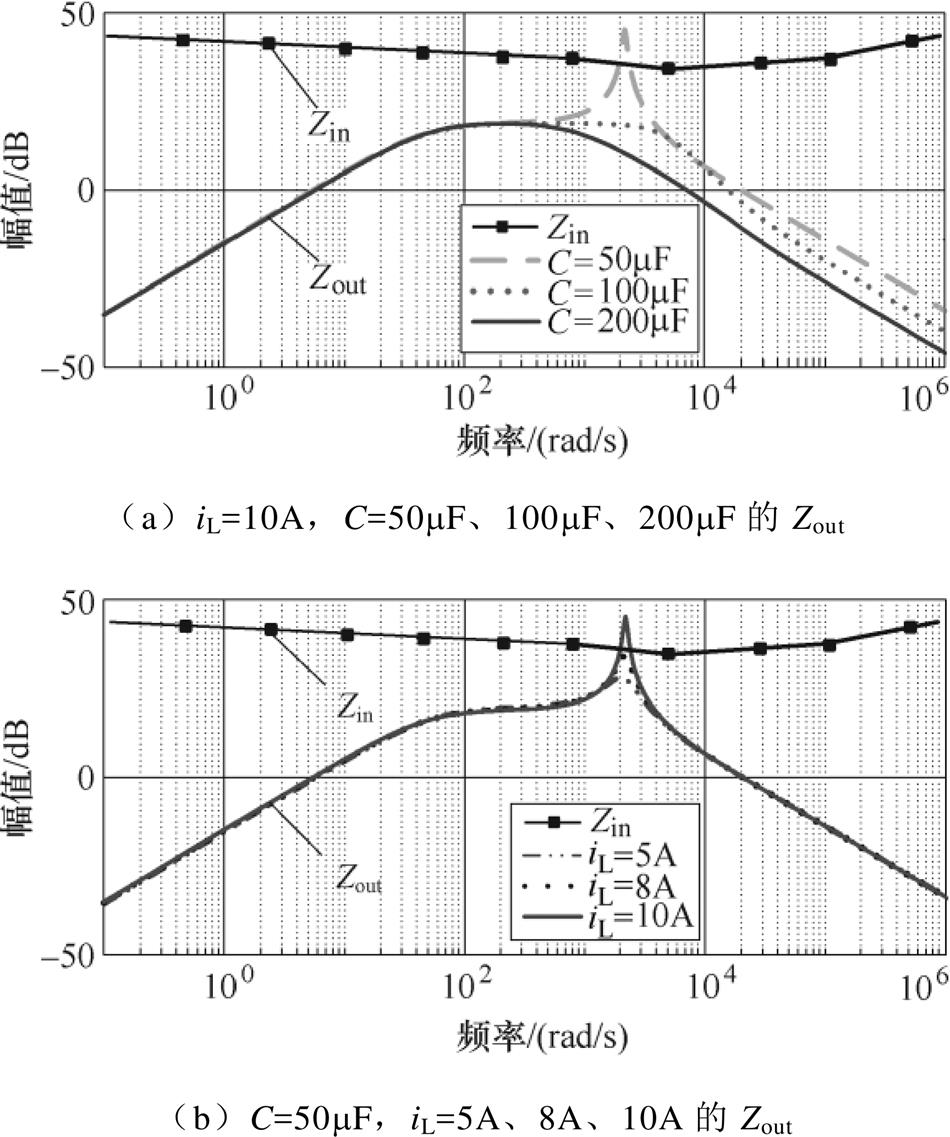
图6 不同母线电容、负载电流下三相VSR输出阻抗
Fig.6 Output impedance of the VSR with different capacitance andload current
船舶电动吊机工作中不仅要求双PWM调速系统满足Middlebrook判据,还需使其具有较高的带载能力,本节设计了电压前馈补偿环节,以减小整流器输出阻抗峰值,设计d轴电流前馈补偿环节提升系统带载能力,综合两种方案得到小电容双PWM调速系统控制方案。
由图6a知,阻抗发生交截的部分主要在较高频段,所以在设计电压前馈补偿器时应尽可能保证其低频段阻抗不变而降低其高频阻抗峰值。图7为电压前馈补偿环节结构,式(11)为电压前馈补偿器传递函数。
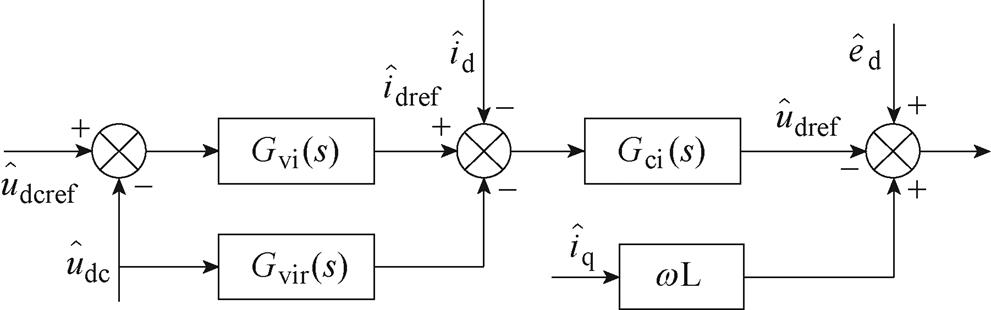
图7 电压前馈补偿环节结构
Fig.7 Structure diagram of voltage feedforward link
 (11)
(11)
式中,Kv、wv为电压补偿器系数。加入电压前馈补偿后与图5相比l3改变, 表达式如式(12)所示,三相VSR输出阻抗记为
表达式如式(12)所示,三相VSR输出阻抗记为 ,其表达式如式(13)所示。
,其表达式如式(13)所示。
 (12)
(12)
 (13)
(13)
将不同Kv、wv代入式(13)可得到几组不同Kv、wv下三相VSR输出阻抗幅值特性曲线如图8a所示。为设计电压补偿器Kv、wv系数,可将其视为变量,比较不同系数下的输出阻抗峰值如图8b所示。
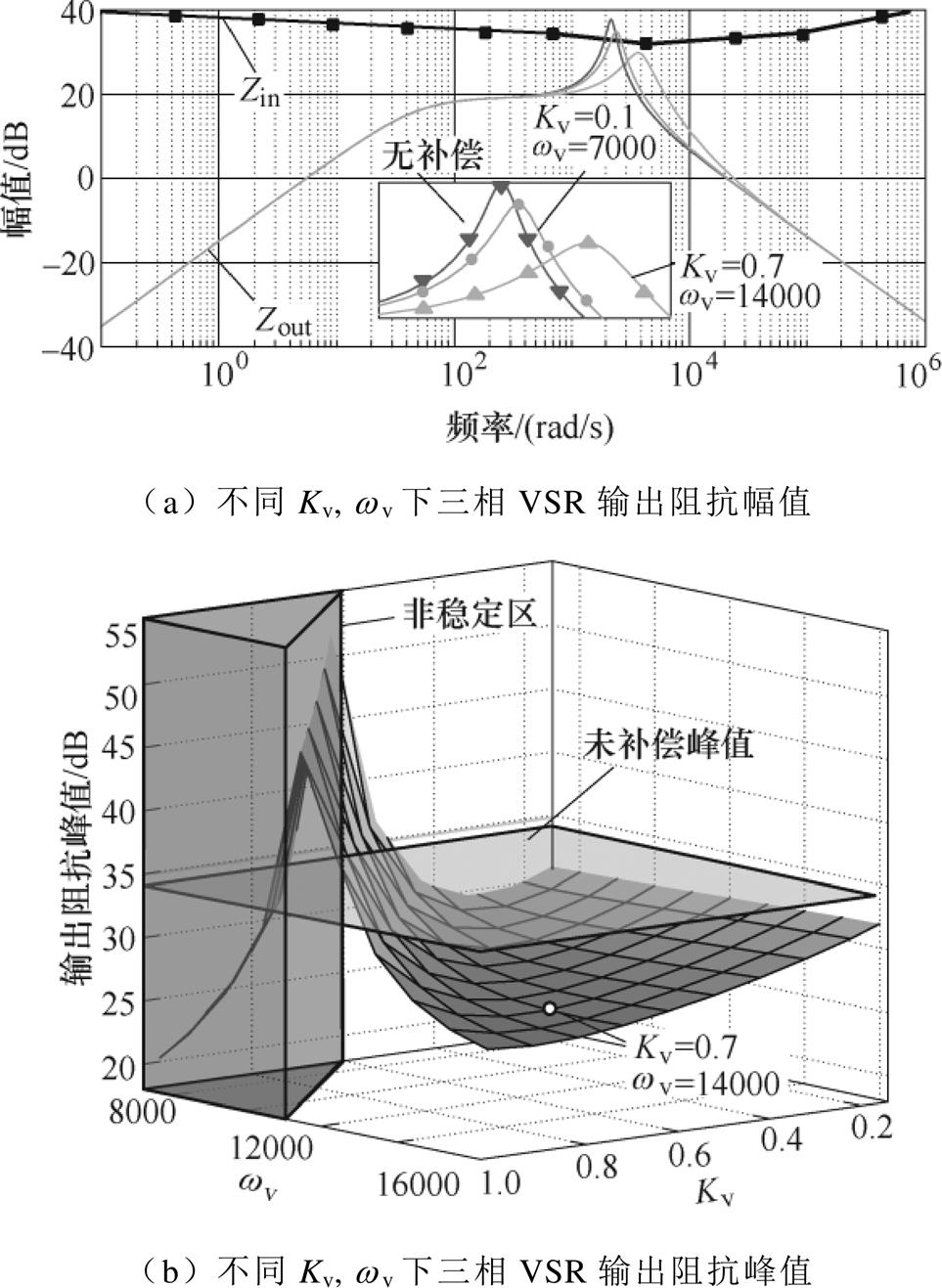
图8 Kv, wv对系统输出阻抗的影响
Fig.8 Output impedance amplitude with Kv, wv
由图8a知,电压前馈补偿环节可以明显降低三相VSR输出阻抗峰值,Zout与Zin不再相交从而满足Middlebrook稳定性判据。但同时存在多组Kv、wv可使三相VSR输出阻抗峰值减小如图8b所示,设计参数时不仅要保证级联稳定性,还需保证三相VSR单极稳定即闭环特征方程所有的根均有负实部,图8b中左侧非稳定区域虽有较好地减少阻抗的效果,但三相VSR单级失稳。所以综合考虑单极稳定性与阻抗减小效果选择参数Kv=0.7,wv=14 000。
由图6b知,负载电流越大,Zout越易与Zin相交,而小电容的加入会使系统阻抗峰值增加,减小负载电流iL可使系统稳定,但这会使三相VSR带载能力下降。本节为提升系统带载能力设计如图9所示d轴电流前馈补偿环节,式(14)为d轴电流前馈补偿器传递函数。
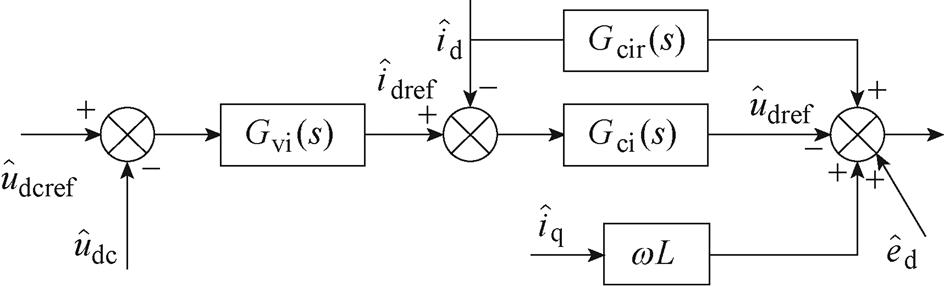
图9 d轴电流前馈补偿环节结构
Fig.9 Structure diagram of d-current feedforward link
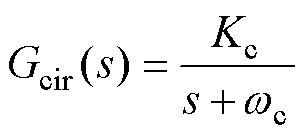 (14)
(14)
式中,Kc、wc为电流补偿器系数。加入d轴电流前馈补偿后与图5相比n2、l2改变, 、
、 如式(15)、式(16)所示。三相VSR输出阻抗记为
如式(15)、式(16)所示。三相VSR输出阻抗记为 ,其表达式如式(17)所示。
,其表达式如式(17)所示。
 (15)
(15)
 (16)
(16)
 (17)
(17)
其参数设计过程与电压前馈补偿类似,此处不再赘述,选择参数Kc=25 000,wc=4 400作为d轴电流前馈补偿器参数。为比较补偿前后带载能力的差别,以直流负载电流iL为变量,使其从7A增大到16A,观察系统主导极点变化趋势如图10所示。
由图10知,随着iL不断增大,系统的主导极点向右半平面移动,即系统稳定性随负载电流增大而下降。对比临界稳定状态,加入d轴电流补偿环节的最大负载电流15.2A明显大于无补偿时的10.3A。所以加入d轴前馈补偿后系统稳定区间变大,即系统带载能力提升。
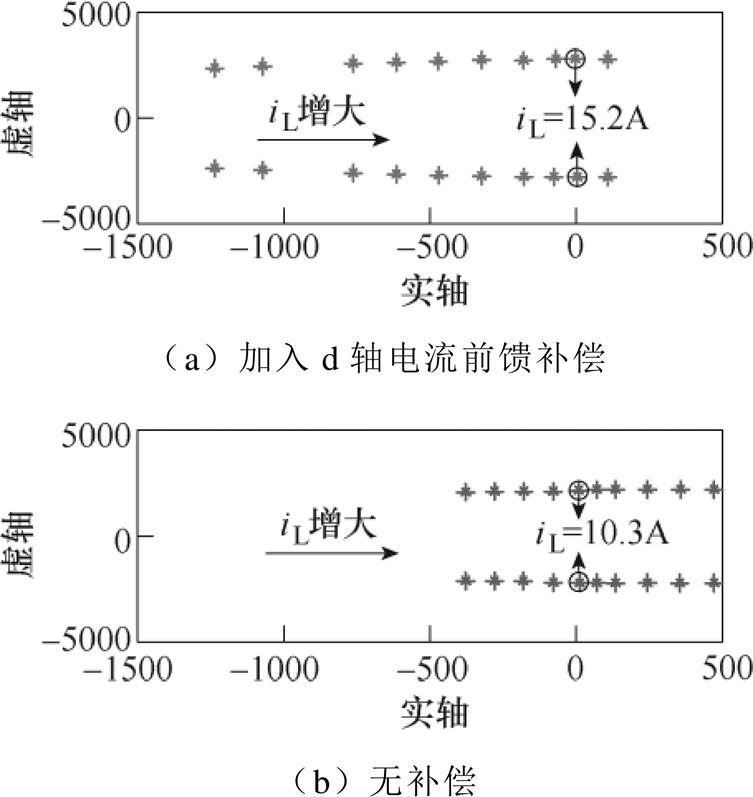
图10 系统主导极点随iL变化示意图
Fig.10 Diagram of system dominant pole changing with iL
为了使三相VSR同时具有较低的输出阻抗峰值以及较强的带载能力,采用复合阻抗补偿的方法,如图11所示。
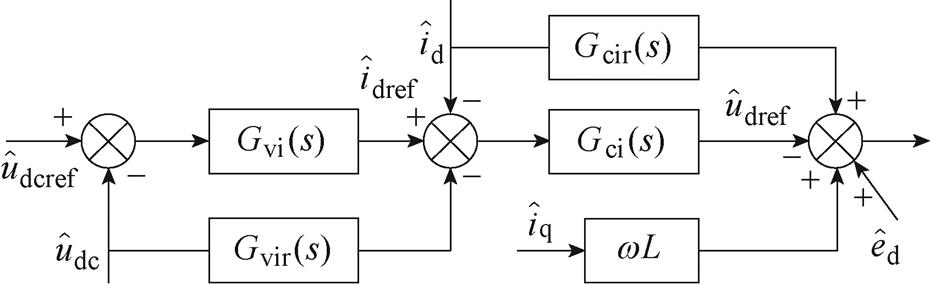
图11 复合阻抗补偿环节结构
Fig.11 Structure diagram of compound feedforward link
上述几种方案的阻抗峰值减小效果如图12所示,可见,复合阻抗补偿方案使系统输出阻抗峰值由34dB变为25dB,优于单独电压前馈补偿30dB和单独电流前馈的26.5dB,Zout与Zin不再相交,系统满足Middlebrook判据。
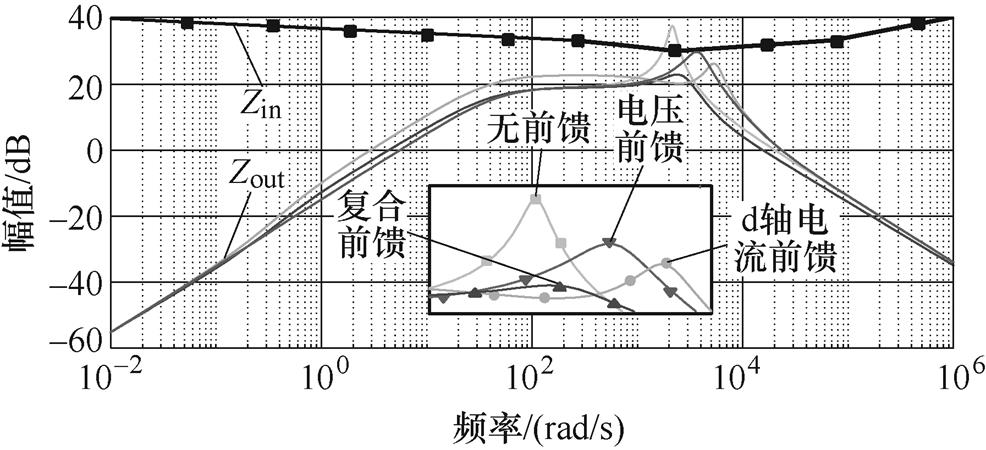
图12 三相VSR不同阻抗补偿办法输出阻抗
Fig.12 Output impedance with different method
当直流母线电压稳定时,可认为整流侧负载电流有效值代表小电容系统带载能力,同时考虑级联稳定性与单级稳定性,得到不同电容下不同补偿办法的最大负载电流如图13所示。
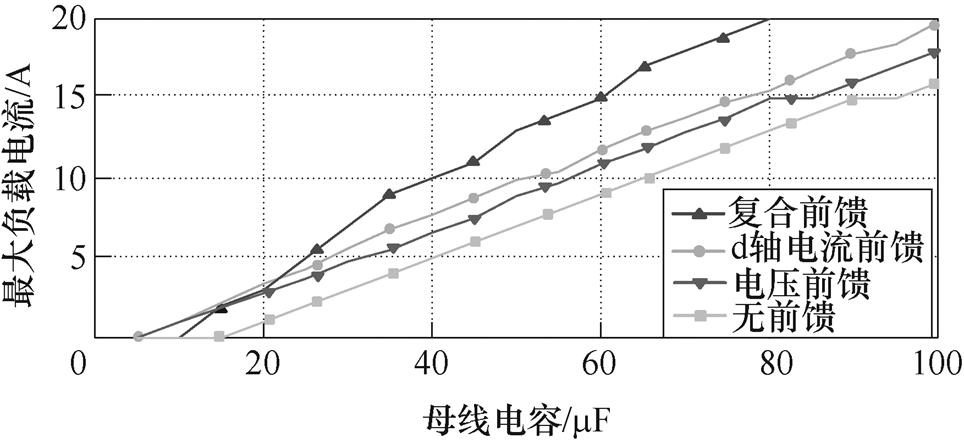
图13 不同电容下最大负载电流
Fig.13 Maximum iL at different capacitances
由图13知,复合输出阻抗结合了二者的优势不仅具有较低的输出阻抗峰值,也具有较高的带载能力。
建立小电容双PWM调速系统仿真模型参数见表1。永磁同步电机运行于1 000r/min,在0.5s时,负载转矩由8N∙m变为16N∙m,并于0.7s时恢复。
表1 小电容双PWM调速系统仿真参数
Tab.1 Specificparameters of dual-PWM speed regulation system with small capacitance
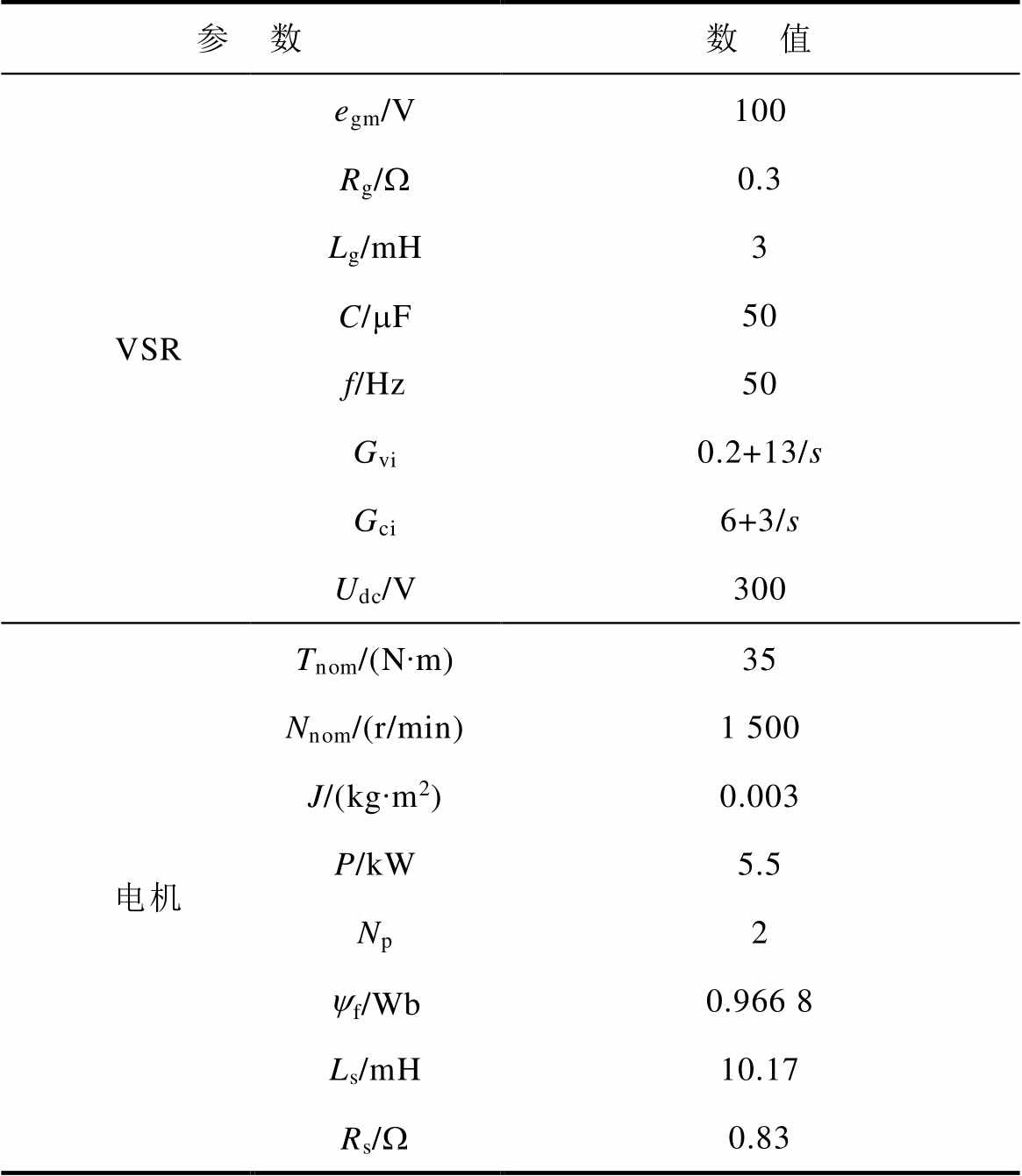
参 数数 值 VSRegm/V100 Rg/W0.3 Lg/mH3 C/mF50 f/Hz50 Gvi0.2+13/s Gci6+3/s Udc/V300 电机Tnom/(N∙m)35 Nnom/(r/min)1 500 J/(kg∙m2)0.003 P/kW5.5 Np2 yf/Wb0.966 8 Ls/mH10.17 Rs/W0.83
第2节提到的补偿方法对比效果如图14~图16所示,图中,Ⅰ表示无前馈补偿,Ⅱ表示电压前馈补偿,Ⅲ表示d轴电流前馈补偿,Ⅳ表示复合前馈补偿。图17为电机转矩与转速。表2为不同补偿策略数据对比。
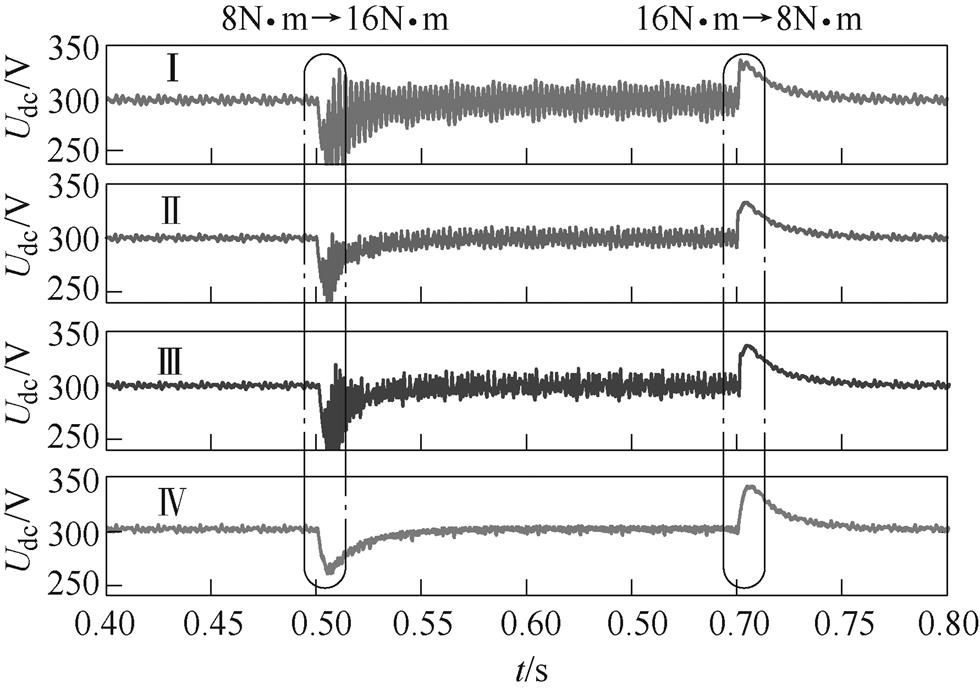
图14 不同补偿策略下的直流母线电压(C=50mF)
Fig.14 DC bus voltage under different strategies (C=50mF)
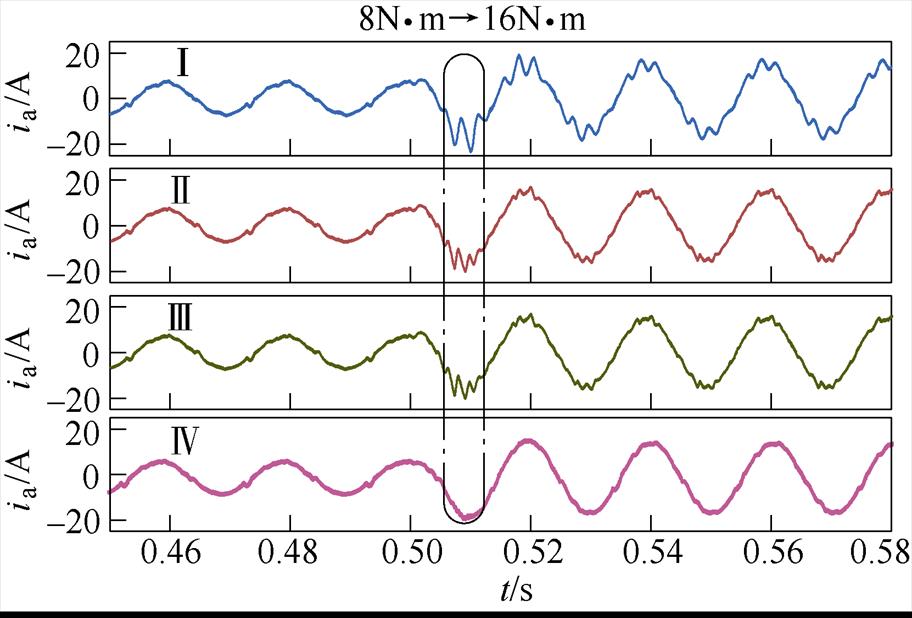
图15 不同补偿策略下的A相电流(C=50mF)
Fig.15 A phase current under different control strategies (C=50mF)
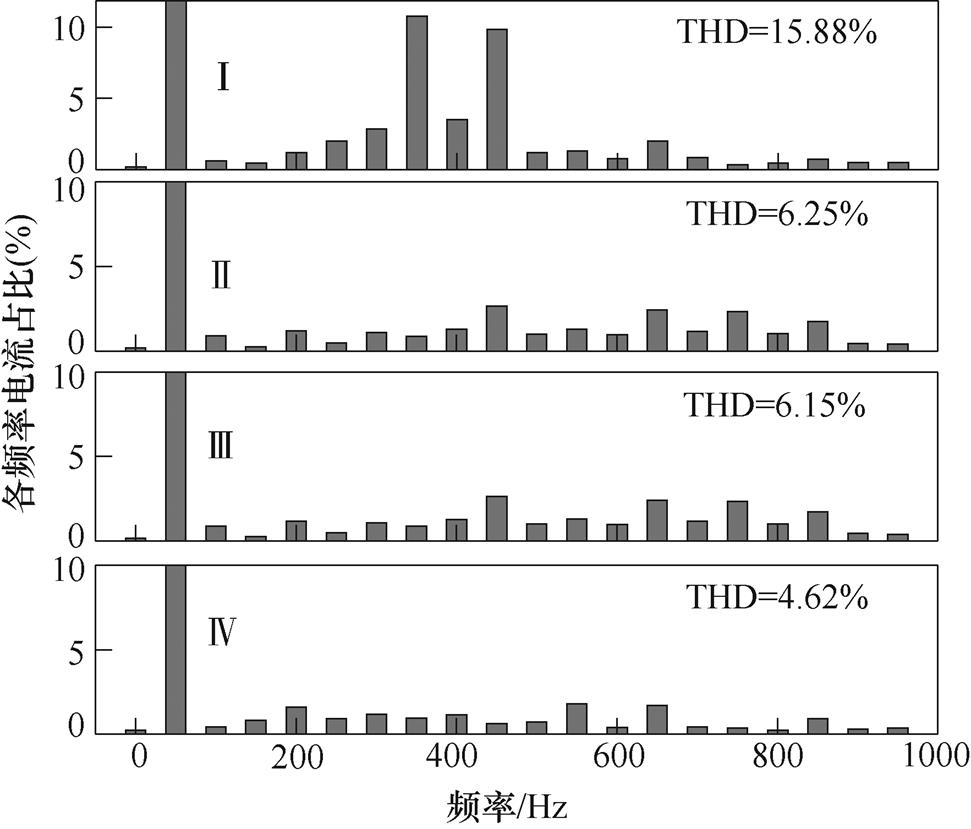
图16 不同补偿策略下的A相电流THD(C=50mF)
Fig.16 A phase current THD under different control strategies (C=50mF)
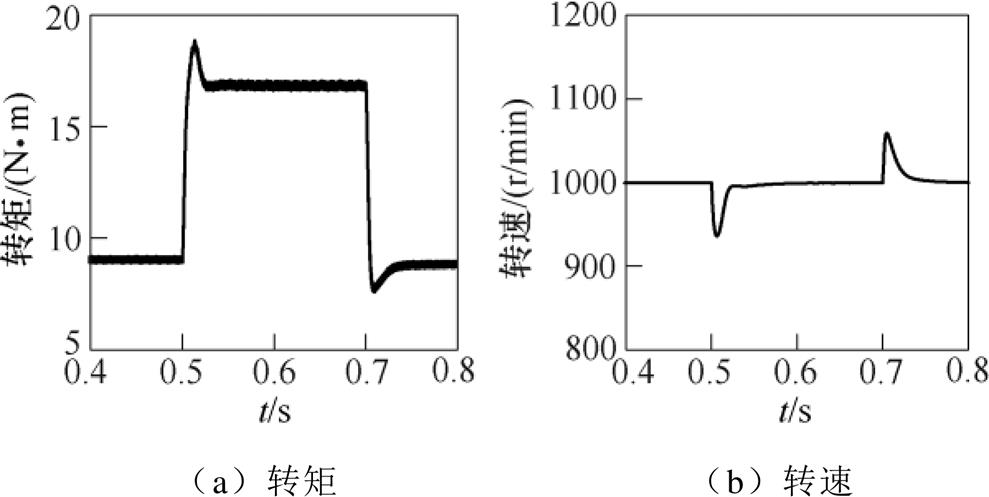
图17 永磁同步电机转矩与转速
Fig.17 Torque and speed of PMSM
从图14~图17中可知,永磁同步电机转矩突变时无前馈补偿(方法Ⅰ)的电压超调较大、调节时间较长、稳态电压波动较大、A相电流THD较大;加入电压前馈补偿后(方法Ⅱ)与方法Ⅰ相比稳态电压波动下降50%,A相电流THD下降60.1%;加入d轴电流前馈补偿(方法Ⅲ)与方法Ⅰ相比稳态电压波动下降36.8%,A相电流THD下降61.3%;复合前馈补偿(方法Ⅳ)与方法Ⅰ相比,稳态电压波动下降36.8%,A相电流总谐波畸变率(Total Harmonic Distortion, THD)下降65.8%。由此可见,所提策略不仅能保证小电容双PWM系统稳定运行,还能使系统母线电压波动、注入电网谐波量显著减小。
表2 不同补偿策略仿真数据
Tab.2 Simulation datas under different strategies

方法电压超调(%)调节时间/s稳态电压波动/VA相电流THD(%) Ⅰ23.20.053815.88 Ⅱ16.80.05196.25 Ⅲ22.80.04246.15 Ⅳ13.30.04134.62
为了对第2节提到的补偿方法进行验证,搭建小电容双PWM调速实验平台进行研究,采用两个TMS320F28335处理器分别控制三相VSR、永磁同步电机实验平台,开关频率均为10kHz,如图18所示。本次实验模拟电动船舶吊机升降重物过程,永磁同步电机采用转子磁场定向矢量控制转速给定1 000r/min,负载转矩由8N∙m突变至16N∙m后恢复。为保护功率器件不被损害,实验中电机加减载采用斜坡信号给定方式。三相VSR分别采用无前馈补偿与三种前馈补偿,进行对比实验。实验参数与表1中参数一致,系统运行时整流侧逆变侧波形如图19所示,母线电压、电网电流在不同补偿策略下实验波形如图20~图23所示。
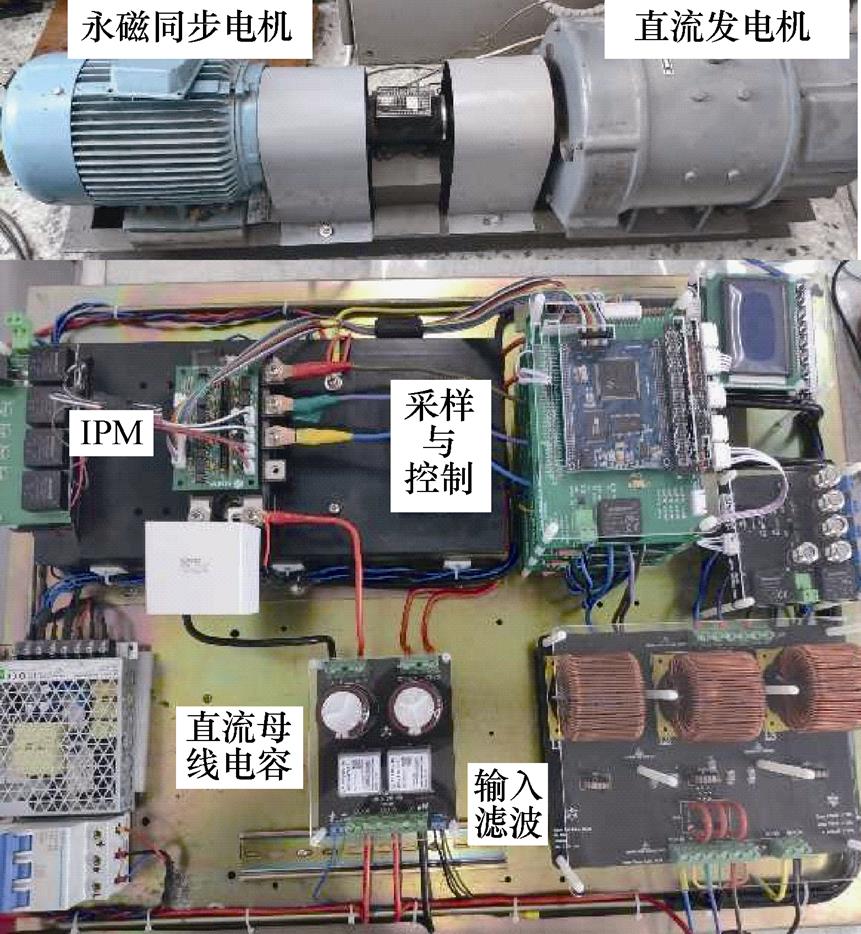
图18 小电容双PWM调速系统实验台
Fig.18 Experiment of small capacitor double PWM speed regulation system
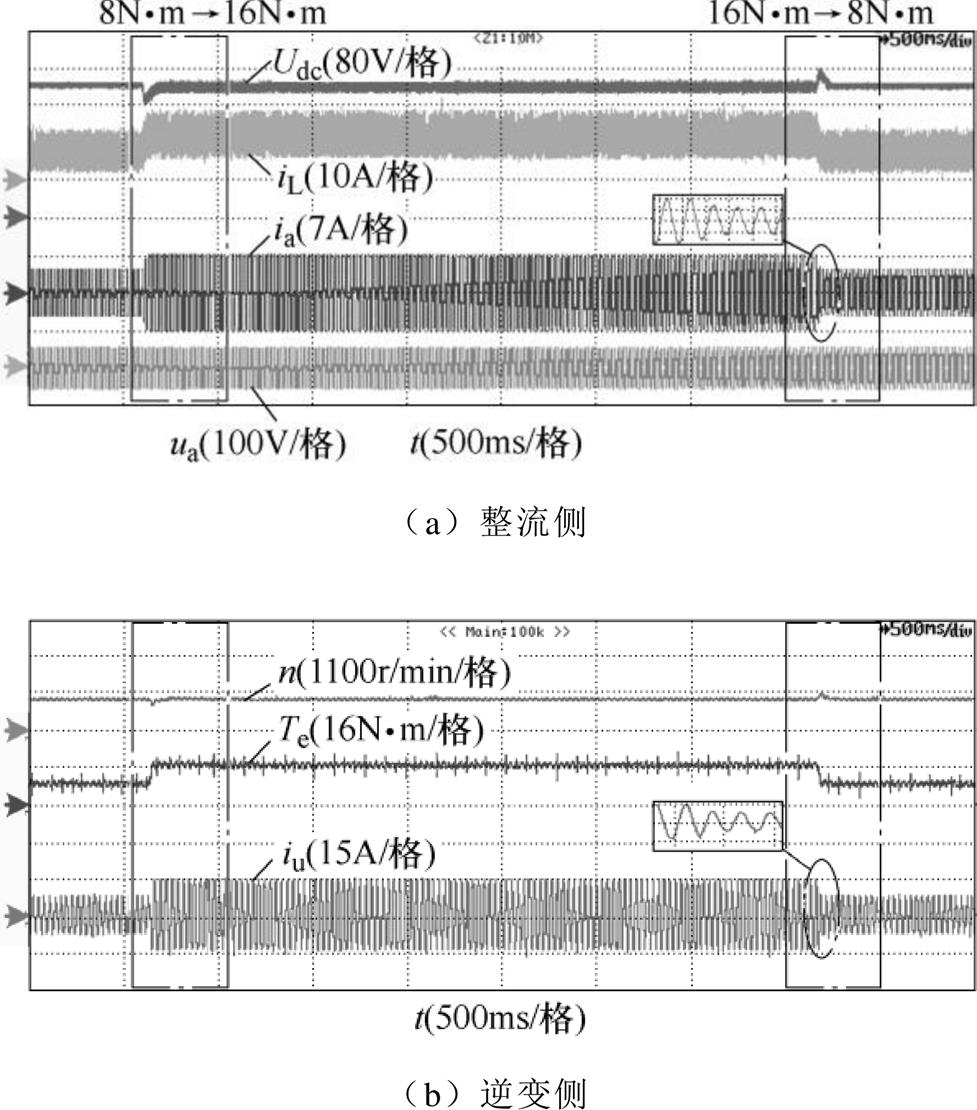
图19 1 000r/min时转矩突变系统参数
Fig.19 Performances of system parameters at a torque step at 1 000r/min
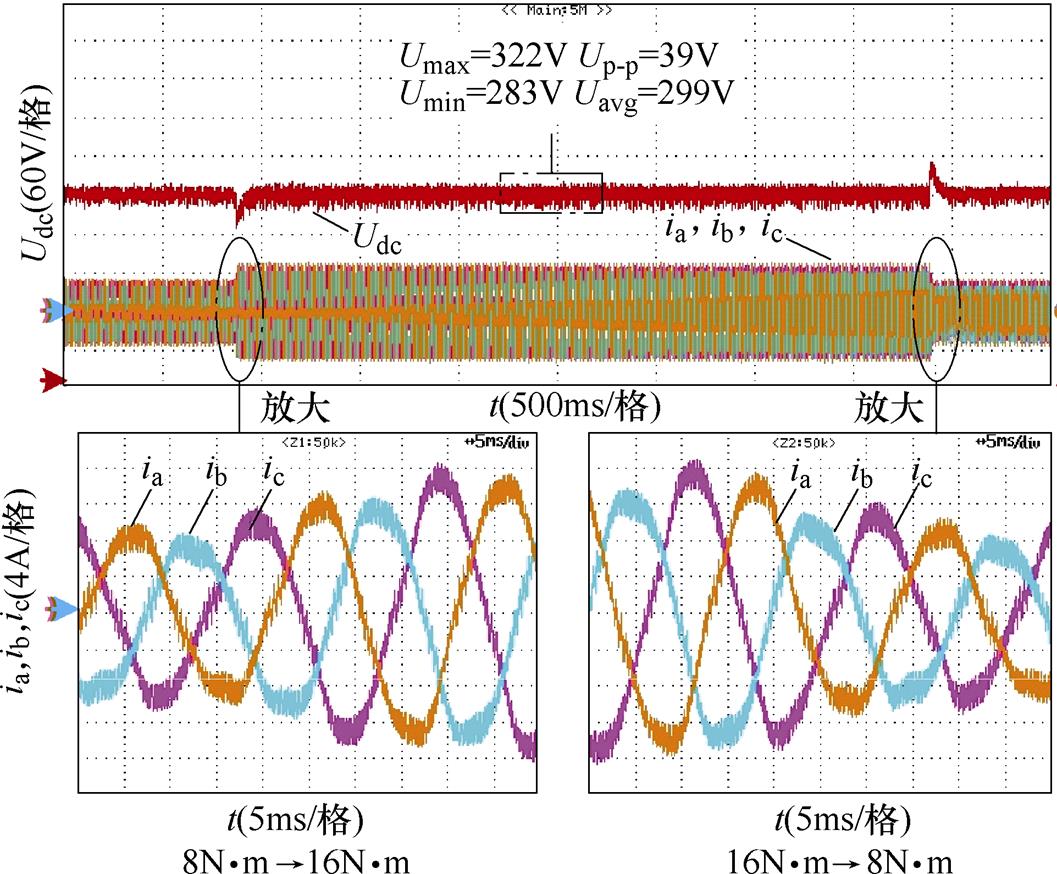
图20 无前馈补偿母线电压、电网电流(方法Ⅰ)
Fig.20 Bus voltage, network current without feedforward compensation (method Ⅰ)
图19给出无前馈补偿策略(方法Ⅰ)电机运行于1 000r/min时,负载由8N∙m突变至16N∙m后恢复的整流侧和逆变侧波形,其中整流侧自上至下分别为直流母线电压、直流母线电流、交流电网A相电流、交流电网A相电压;逆变侧自上至下分别为电机转速、转矩、U相电流。保持逆变侧工况不变,将本文所提四种方法分别应用于整流前级进行4次独立实验,将直流母线电压、交流电网电流波形进行对比,如图20~图23所示。由图20可知,该系统运行中的转矩脉动不仅引起直流母线电压波动,而且也向电网注入大量谐波,此外转矩突变时直流母线电压也会产生较大超调;由图21可知,加入电压前馈补偿后(方法Ⅱ)直流母线电压稳态波动由39V降至24V、电压超调由19.8%降至8.6%,电网电流虽较无前馈补偿策略有所改善但仍存在较大的畸变;由图22知,加入d轴电流前馈补偿后(方法Ⅲ),直流母线电压稳态波动由39V降至28V、电压超调由19.8%降至16%,电网谐波注入明显减小,但转矩突变时仍存在较大的电压超调;由图23可知,采用复合前馈补偿策略后(方法Ⅳ),直流母线电压稳态波动由39V降至12V、电压超调由19.8%降至7.8%,与无前馈补偿策略(方法Ⅰ)相比各参数均有较大改善,实验数据见表3。
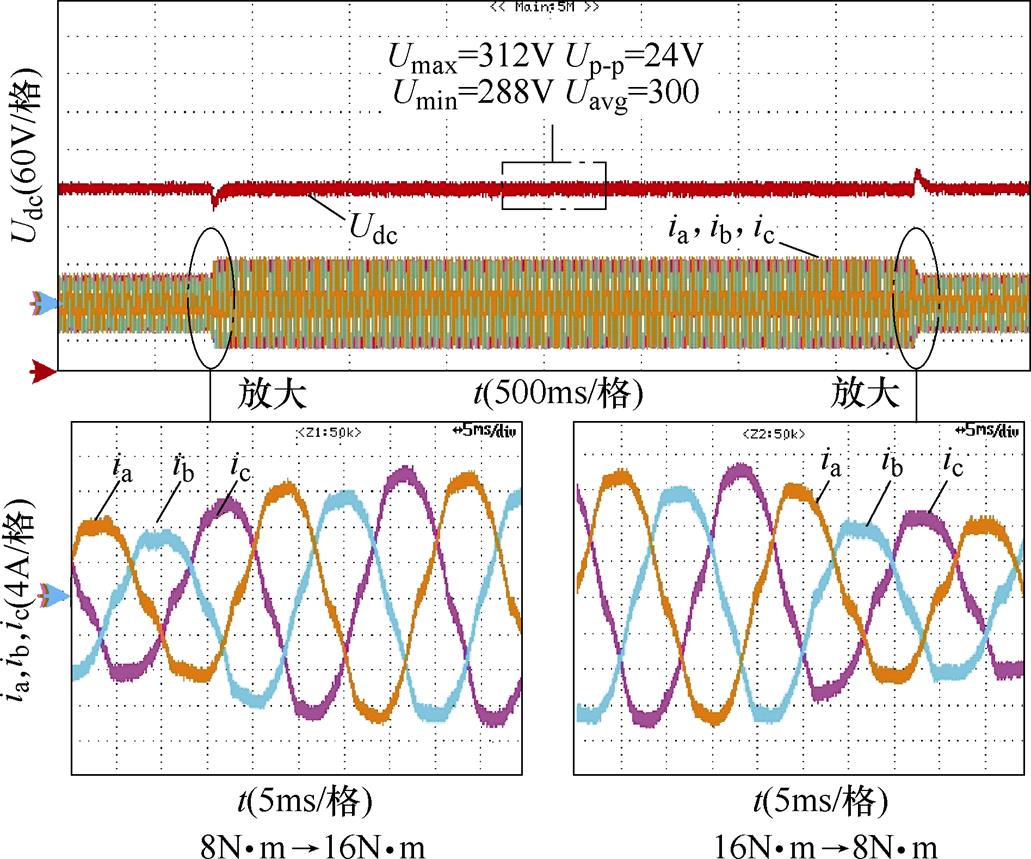
图21 电压前馈补偿母线电压、电网电流(方法Ⅱ)
Fig.21 Bus voltage, network current with voltage feedforward compensation (method Ⅱ)
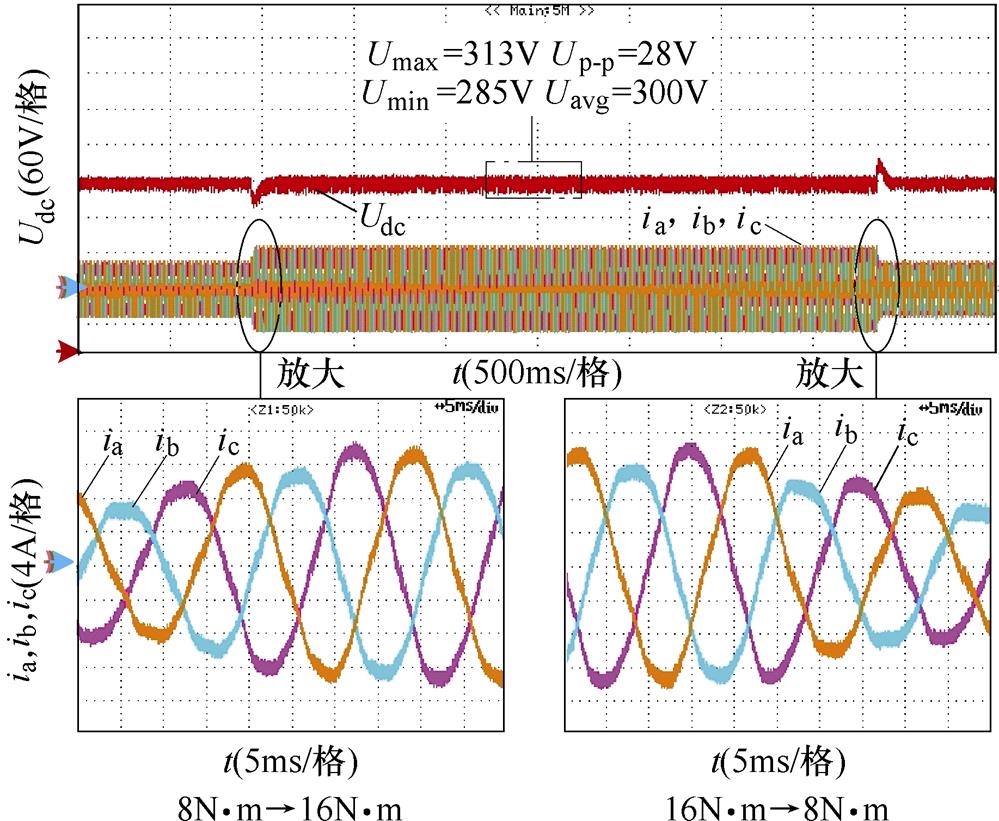
图22 d轴电流补偿母线电压、电网电流(方法Ⅲ)
Fig.22 Bus voltage, network current with d-current feedforward compensation (method Ⅲ)
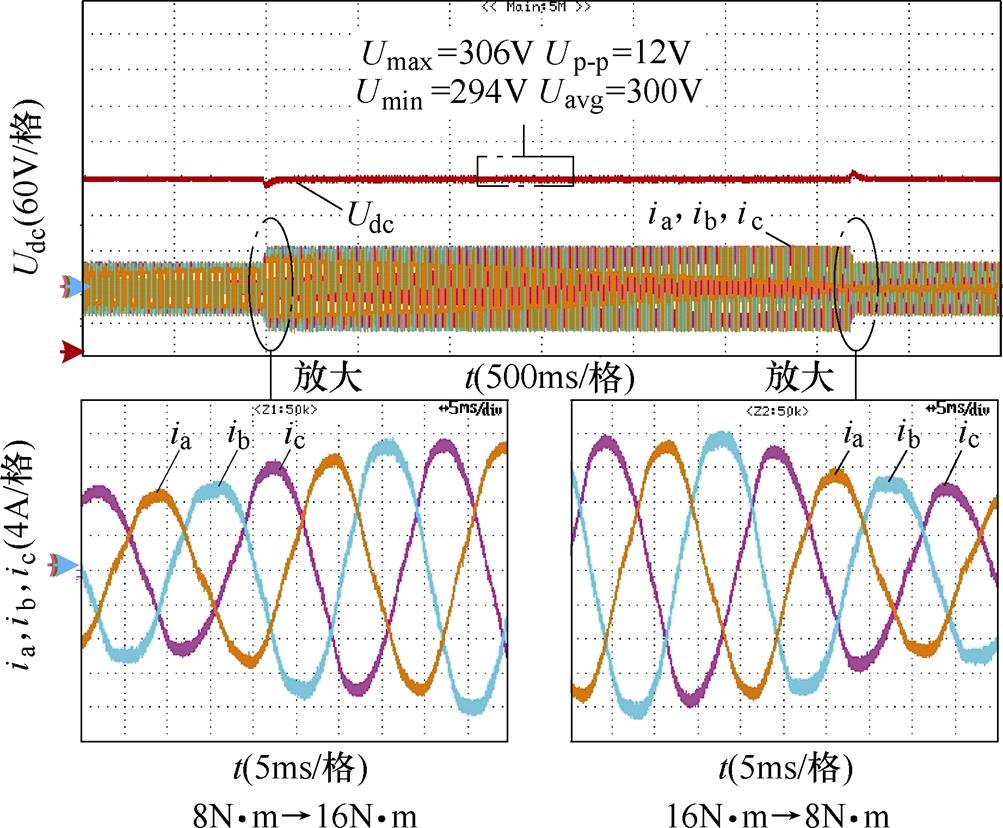
图23 复合前馈补偿母线电压、电网电流(方法Ⅳ)
Fig.23 Bus voltage, network current with compound feedforward compensation (method Ⅳ)
表3 不同补偿策略实验数据
Tab.3 Data comparison under different strategies
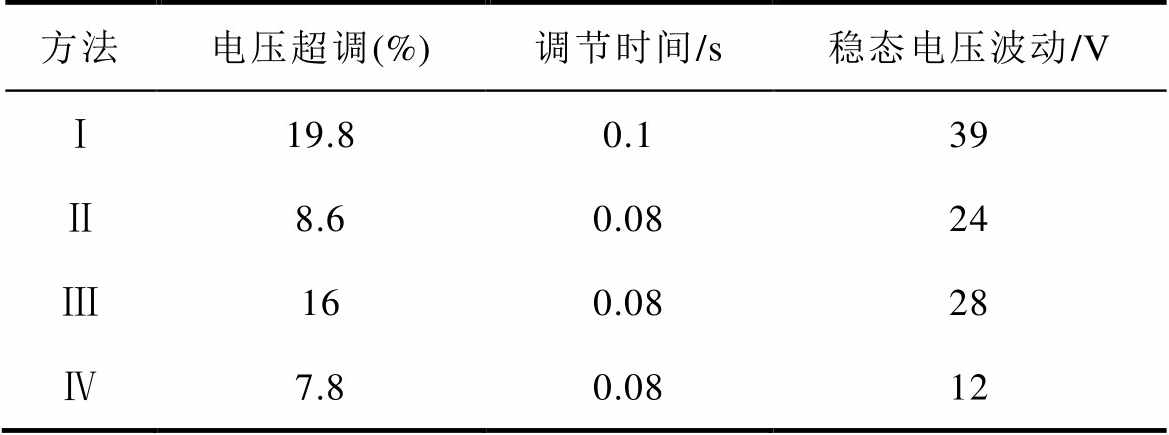
方法电压超调(%)调节时间/s稳态电压波动/V Ⅰ19.80.139 Ⅱ8.60.0824 Ⅲ160.0828 Ⅳ7.80.0812
本次实验证明了所提控制策略在小电容双PWM调速系统中能有效抑制直流母线电压波动。
本文以Middlebrook稳定性判据为依据对小电容双PWM调速系统直流母线电压波动原因进行探究,并提出补偿控制策略对其进行抑制,具体如下:
1)分析了双PWM调速系统在Middlebrook判据下的级联系统稳定性判别方法,并对整流前级三相VSR进行精确的小信号建模,得到系统失稳主要原因是整流前级输出阻抗与逆变后级输入阻抗在高频段存在交点。
2)研究了三相VSR在不同直流母线电容、不同负载电流时输出阻抗特性曲线,并得到结论:直流母线电容越小或负载电流越大时,三相VSR输出阻抗峰值越大,越易与逆变后级阻抗相交使系统 失稳。
3)设计了电压前馈环节降低三相VSR输出阻抗峰值,设计d轴电流前馈环节使其具有较大的带载能力,二者结合的复合阻抗补偿策略能保证小电容双PWM调速系统稳定运行。
4)所提方法在不增加硬件复杂度的前提下,有效地抑制了小电容双PWM调速系统的直流母线电压波动以及电网谐波注入,其参数设计方法具有普适性。
附录
式(6)可由(5)利用式(A1)三相VSR开环传递函数求得。
 (A1)
(A1)
其中
 (A2)
(A2)
 (A3)
(A3)
 (A4)
(A4)
 (A5)
(A5)
 (A6)
(A6)
 (A7)
(A7)
 (A8)
(A8)
 (A9)
(A9)
 (A10)
(A10)
 (A11)
(A11)
 (A12)
(A12)
参考文献
[1] 谢仕宏, 孟彦京, 高钰淇, 等. 小电容变频器及感应电机回馈能量分析[J]. 电工技术学报, 2020, 35(4): 734-744.
Xie Shihong, Meng Yanjing, Gao Yuqi, et al. Analysis about small capacitor frequency converter and feedback energy of induction motors[J]. Transa- ctions of China Electrotechnical Society, 2020, 35(4): 734-744.
[2] 耿程飞, 杨波, 吴翔, 等. 背靠背三电平变流器IGBT共叠层母线过电压耦合分析及解耦方法[J]. 电工技术学报, 2020, 35(增刊2): 440-449.
Geng Chengfei, Yang Bo, Wu Xiang, et al. Coupled over-voltage analysis and decoupling method of IGBT on the one laminated bus-bar based on back to back three-level converter[J]. Transactions of China Elec- trotechnical Society, 2020, 35(S2): 440-449.
[3] Zhao Nannan, Wang Gaolin, Li Binxing, et al. Beat phenomenon suppression for reduced DC-link capa- citance IPMSM drives with fluctuated load torque[J]. IEEE Transactions on Industrial Electronics, 2019, 66(11): 8334-8344.
[4] 叶虹志, 姜燕, 黄守道, 等. 电压型PWM整流器无差拍预测直接功率控制[J]. 电工技术学报, 2015, 30(4): 121-128.
Ye Hongzhi, Jiang Yan, Huang Shoudao, et al. Dead- beat predictive direct power control for three-phase voltage source PWM rectifiers[J]. Transactions of China Electrotechnical Society, 2015, 30(4): 121- 128.
[5] 杨迪瑞, 杨文焕, 李荣高. 双PWM交流调速系统耦合调制建模及其注入电网间谐波电流特性分析[J].中国电机工程学报, 2017, 37(3): 869-880.
Yang Dirui, Yang Wenhuan, Li Ronggao. Modeling for coupling modulation in dual PWM speed control systems and characteristic analysis of inter harmonic currents injected into distribution networks[J]. Proceedings of the CSEE, 2017, 37(3): 869-880.
[6] 朱进权, 葛琼璇, 王晓新, 等. 基于自抗扰和负载功率前馈的高速磁悬浮系统PWM整流器控制策略[J]. 电工技术学报, 2021, 36(2): 320-329.
Zhu Jinquan, Ge Qiongxuan, Wang Xiaoxin, et al. Control strategy for PWM rectifier of high-speed maglev based onactive disturbance rejection control and load power feed-forward[J]. Transactions of China Electrotechnical Society, 2021, 36(2): 320- 329.
[7] Xiao Xiong, Zhang Yongjun, Wang Jing, et al. An improved model predictive control scheme for the PWM rectifier-inverter system based on power- balancing mechanism[J]. IEEE Transactions on Industrial Electronics, 2016, 63(8): 5197-5208.
[8] 李振, 盛万兴, 段青, 等. 背靠背低压直流配电装备及其直流电压控制策略[J]. 中国电机工程学报, 2018, 38(23): 6873-6881, 7121.
Li Zhen, Sheng Wanxing, Duan Qing, et al. Back to back LVDC distribution equipment and DC voltage control strategy[J]. Proceedings of the CSEE, 2018, 38(23): 6873-6881, 7121.
[9] 熊飞, 聂川杰, 李骏驰, 等. 电力电子变压器的内部能量流动协调控制策略[J]. 电力系统自动化, 2020, 44(15): 127-138.
Xiong Fei, Nie Chuanjie, Li Junchi, et al. Coor- dination control strategy for energy flow inside power electronic transformer[J]. Automation of Electric Power Systems Press, 2020, 44(15): 127-138.
[10] Si Zhaolu, Zhao Di, Li Kai, et al. A distributed feedforward control method for power electronic transformers[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(4): 319-328.
[11] Liut P, Pierfe S, Bilal A, et al. Stability investigation of inverter motor drive system with input filter- optimisation of the DC-link capacitance value[C]// IEEE Power Electronics Specialists Conference, Rhodes, 2008: 3728-3734.
[12] Xuan Zhang, Li Xu, Li Yongdong, et al. Stabilization and assessment of interaction dynamics for more electric aircraft[C]//IEEE International Power Elec- tronics and Motion Control Conference, Hefei, 2016: 874-880.
[13] 戴鹏, 朱方田, 朱荣伍, 等. 电容电流直接控制的双PWM协调控制策略[J]. 电工技术学报, 2011, 26(增刊1): 136-141.
Dai Peng, Zhu Fangtian, Zhu Rongwu, et al. Direct control of capacitor current for AC-DC-AC PWM converter[J]. Transactions of China Electrotechnical Society, 2011, 26(S1): 136-141.
[14] Lin Jun, Weiss G. Plug-and-play control of the virtual infinite capacitor[J]. IEEE Transactions on Power Electronics, 2020, 35(2): 1947-1956.
[15] Wang Ruxi, Wang Fei, Boroy D, et al. A high power density single-phase PWM rectifier with active ripple energy storage[J]. IEEE Transactions on Power Electronics, 2010, 26(5): 1430-1443.
[16] 张欣, 阮新波. 用于提高级联型电源系统稳定性的自适应有源电容变换器[J]. 电工技术学报, 2012, 27(2): 23-32.
Zhang Xin, Ruan Xinbo. Adaptive active capacitor converter for improving the stability of cascaded DC power supply system[J]. Transactions of China Elec- trotechnical Society, 2012, 27(2): 23-32.
[17] 黄远胜, 刘和平, 苗轶如, 等. 基于并联虚拟电阻的级联DC-DC变换器稳定控制方法[J]. 电工技术学报, 2020, 35(18): 3927-3937.
Huang Yuansheng, Liu Heping, Miao Yiru, et al. Cascaded DC-DC converter stability control method based on paralleling virtual resistor[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3927-3937.
[18] Liuta P, Awan A, Pierfe S, et al. Linear stabilization of a DC bus supplying a constant power load: a general design approach[J]. IEEE Transactions on Power Electronics, 2010, 25(2): 475-488.
[19] 夏文婧, 刘碧, 王嵩, 等. 基于输入端电压动态分量优化的PWM整流器模型预测控制[J]. 电力系统自动化, 2020, 44(1): 200-207.
Xia Wenjing, Liu Bi, Wang Song, et al. Model predictive control of PWM rectifiers based on dynamic component optimization of input-port voltage[J]. Automation of Electric Power Systems Press, 2020, 44(1): 200-207.
DC Bus Voltage Fluctuation Suppression Strategy for Small Capacitance Dual-PWM Speed Regulating System
Abstract Dual-PWM AC-DC-AC speed regulating system is widely used in modern Marine electric cranes. However, the system is not suitable for integration and maintenance because the DC bus uses large-capacity electrolytic capacitors. Based on the modeling of small signals, this paper presents a control strategy using small capacitance. Firstly, the reasons for system instability when the DC bus adopts small capacitors are analyzed. Then, the DC bus voltage feed-forward compensation and the d-axis current feed-forward compensation are designed to improve the system stability and load capacity. Combined with their advantages, the control strategy of small capacitance dual PWM speed regulation system is obtained. The simulation and experiment with permanent magnet synchronous motor as the load show that this strategy can ensure the stable operation of the system, restrain the voltage fluctuation of the DC bus during load sudden change and vibration, reduce the harmonic injection into the power network, and the parameter design method is universal.
keywords:Dual-PWM speed regulating, small signal modeling, small capacitance, feed-forward compensation, restrain the voltage fluctuation of the DC bus
DOI: 10.19595/j.cnki.1000-6753.tces.211056
中图分类号:TM921
姚绪梁 男,1969年生,博士,教授,研究方向为电力电子与电力传动、船舶电力推进技术。E-mail: yaoxuliang@hrbeu.edu.cn(通信作者)
罗兴鸿 1997年生,硕士研究生,研究方向为电力电子与电力传动、船舶电力推进技术。E-mail: travis@hrbeu.edu.cn
收稿日期 2021-07-15
改稿日期 2021-09-17
黑龙江省自然科学基金“集成电机推进器电力电子噪声主动抑制策略研究资助项目”(LH2021E037)。
(编辑 陈 诚)