
图1 线圈驱动拓扑
Fig.1 Coil control topology
摘要 该文针对电磁开关在PWM闭环控制下引起的高频吸持噪声问题展开研究,提出一种电磁开关高频吸持噪声抑制的自适应控制策略。首先,分析电磁开关PWM闭环控制高频吸持噪声产生的几个影响因素,据此提出需要综合采取三项措施来抑制这一高频噪声;然后,结合电磁开关实际运行特点,设计基于模糊控制的电磁开关高频吸持噪声自适应抑制策略,通过模糊控制逻辑整合on/off控制、自整定PID控制以及伪开环控制各自的优点,来实施噪声抑制措施;最后,构建电磁开关联合仿真模型,开发基于CompactRIO的电磁开关快速控制原型验证系统,对电磁开关噪声与振动信号进行频域分析,对控制策略进行验证,仿真及实验结果证明所提控制策略能够有效抑制电磁开关的高频吸持噪声。
关键词:PWM闭环控制 高频吸持噪声 模糊控制 自整定PID 电磁开关
智能电网与能源互联网的发展为电器工业带来了新的机遇与挑战[1-2]。传统交流电磁开关尤其是大容量的在吸持阶段存在工作电压范围窄、抗电压跌落能力差、功耗高、噪声大、温升严重等一系列问题[3]。为克服上述缺陷,其智能控制方式大多采用脉冲宽度调制(Pulse Width Modulation, PWM)励磁,利用电磁线圈的强感性,得到灵活可控的线圈电流[4],包括PWM电压闭环控制[5-6]、PWM电流闭环控制[7]、无位置传感器位移分段PWM控制[8-10]、斜率闭环PWM控制[11]等。总结上述控制方案:线圈均采用高频方波电压进行激励,通过选择线圈电压、线圈电流、动铁心位移、线圈电流斜率等作为反馈控制变量,来调节方波励磁电压占空比,从而灵活控制电磁开关的励磁状态,提高开关性能。但闭环高频方波励磁方式的引入使得电磁开关在运行过程中带来了新的噪声问题,相较于传统噪声,该噪声频率更高、更加尖锐。同时,随着电磁开关容量的提高,其电磁机构的驱动功率也逐渐增大,保持过程产生的噪声则越加严重[12-13],带来高频噪声污染,限制了电磁开关在静音环境的应用场合。因此,研究电磁开关在方波闭环励磁下,如何抑制其高频吸持噪声具有重要意义。
目前,在电气工程领域,国内外学者对电力变压器、电容器以及电机等设备的振动与噪声做了大量研究。文献[14]采用有限元方法分析了变压器不同绕组预紧力情况下的振动特征和变化趋势。文献[15-17]研究了电容器振动与噪声特性,在理论分析电容器噪声产生机理的基础上,搭建电容器振动与噪声测量系统,探究噪声辐射传播模式,提出噪声抑制方案等一系列研究。文献[18]采用随机开关频率脉宽调制策略,使电流频谱特性趋于均匀,从而削弱电机的电磁振动和噪声。关于电磁开关振动与噪声方面的研究,文献[19]开发基于振速法的交流接触器噪声测量系统,实现强背景噪声环境下交流接触器的噪声测量。文献[20]从接触器运行时的振动位移与声级两方面对其状态进行在线监测,但上述文献均是从噪声测量角度对工频激励下的交流接触器进行研究,而对电磁开关在高频方波闭环励磁下产生的吸持噪声进行测量并采取抑制措施的研究鲜见报道。
针对这一问题,首先,分析接触器这一典型电磁开关PWM闭环过程高频吸持噪声产生的几个影响因素,进而提出要抑制这一噪声需要综合采取的三项措施。然后,为了有效实施这三项措施,提出基于模糊控制的电磁开关高频吸持噪声自适应抑制策略——根据线圈电流误差值及其误差变化率,通过模糊推理,合理选择不同的PWM控制方式,充分结合各控制方式的优点,来兼顾线圈电流的快速动态闭环调节及高频噪声的有效抑制。最后,构建整个控制方案的联合仿真模型及快速控制原型验证系统,采用仿真及实验的方法验证所提控制方案的有效性。
如图1a所示为电磁开关线圈驱动电路拓扑, 交/直流输入电源经整流桥UR整流和电容C滤波后得到较为平直的直流;开关管S1和S2、快恢复二极管VD1和VD2组成PWM控制电路;Rcoil与Lcoil分别为电磁开关线圈等效电阻和等效电感。当开关管S1与S2同时导通时,线圈驱动拓扑处于励磁状态,此时线圈电压为左正右负,线圈电流流通路径如图1b所示;当开关管S1截止、S2导通时,线圈驱动拓扑处于续流状态,忽略导通管压降,此时线圈两端电压为零,线圈电流流通路径如图1c所示;当开关管S1与S2同时截止时,由于线圈的阻感特性,线圈电流需保持连续,电容电压UC加在线圈两端,此时线圈两端电压为右正左负,电磁机构电磁能快速转化为电容电场能,迫使线圈电流快速下降,线圈驱动拓扑处于退磁状态,线圈电流流通路径如图1d所示。该驱动电路可以控制线圈高频励磁电压的占空比及极性,为电磁开关励磁状态的灵活控制提供硬件基础。
图1 线圈驱动拓扑
Fig.1 Coil control topology
传统on/off方式的PWM控制根据线圈电流参考值与实际值的误差,将线圈电压占空比设为100%或0%,可以获得最快的线圈电流动态响应,使线圈电流快速跟踪参考值,但同时占空比的剧烈变化也会造成线圈电流较大的纹波及保持噪声[21-22]。滞环控制将开关函数计算的输出连接至滞环比较器以产生控制脉冲,该方式简单易实现,且响应速度快、鲁棒性强[23],但存在开关频率不固定的缺陷,除了会导致线圈电流较大的纹波及保持噪声外,还会使噪声频谱的分布难以确定。基于PID算法的PWM控制,可以通过设置合适的参数来平衡线圈电流的动态及稳态性能,当线圈电流稳定在参考值时,其输出占空比动态变化较小,电流纹波较小,更重要的是保持噪声的频谱分布也相对稳定,便于对噪声进行抑制。但常规PID控制参数的整定高度依赖工程技术人员的经验,整定过程耗时费力。
本小节从理论与实验角度分析了电磁开关高频闭环噪声产生机理,进而设计相应的抑制措施。
如图2所示为常用的双E形直动式电磁机构,电磁开关在稳定吸持阶段其铁心间气隙很小,磁极间磁场分布往往较为均匀,可用麦克斯韦公式计算稳定吸持阶段的电磁吸力为
 (1)
(1)

图2 典型电磁机构
Fig.2 Typical electromagnetic mechanism
式中,F为电磁吸力;B为磁感应强度;A为铁心端面积; 为真空磁导率。
为真空磁导率。
由式(1)可知,在稳定吸持阶段,电磁吸力与磁感应强度的二次方呈正相关,故磁感应强度变化大小及频率将影响电磁力的变化。
采用电流闭环控制时可看作是恒磁动势系统,由安培环路定律可知
 (2)
(2)
 (3)
(3)
 (4)
(4)
式中,H为磁场强度;L为闭合磁路长度;N为线圈匝数;i为线圈电流; 为磁导率;
为磁导率; 为相对磁导率。
为相对磁导率。
由式(2)~式(4)可知,电磁开关铁心的磁感应强度大小及频率受线圈匝数、线圈电流大小及频率的影响。
如图3所示为电磁开关在不同PWM输出频率开环控制的吸持噪声频谱图。X轴为噪声频谱,Y轴为PWM输出频率,Z轴为噪声的A计权声压级。对电磁开关在不同PWM输出频率开环控制的吸持噪声进行测量,通过A计权滤波与傅里叶分析得到噪声频谱图,实验过程吸持电流控制在(0.6±0.02)A。由图3可知,电磁开关在开环控制下,其保持噪声频谱峰值随PWM信号频率的提高向高频转移,根据声学相关理论可知,最终噪声将移出人耳可听范围。虽然提高开关频率以及开环控制方式能有效移除可听噪声,但不能满足现阶段对电磁开关的闭环控制要求。
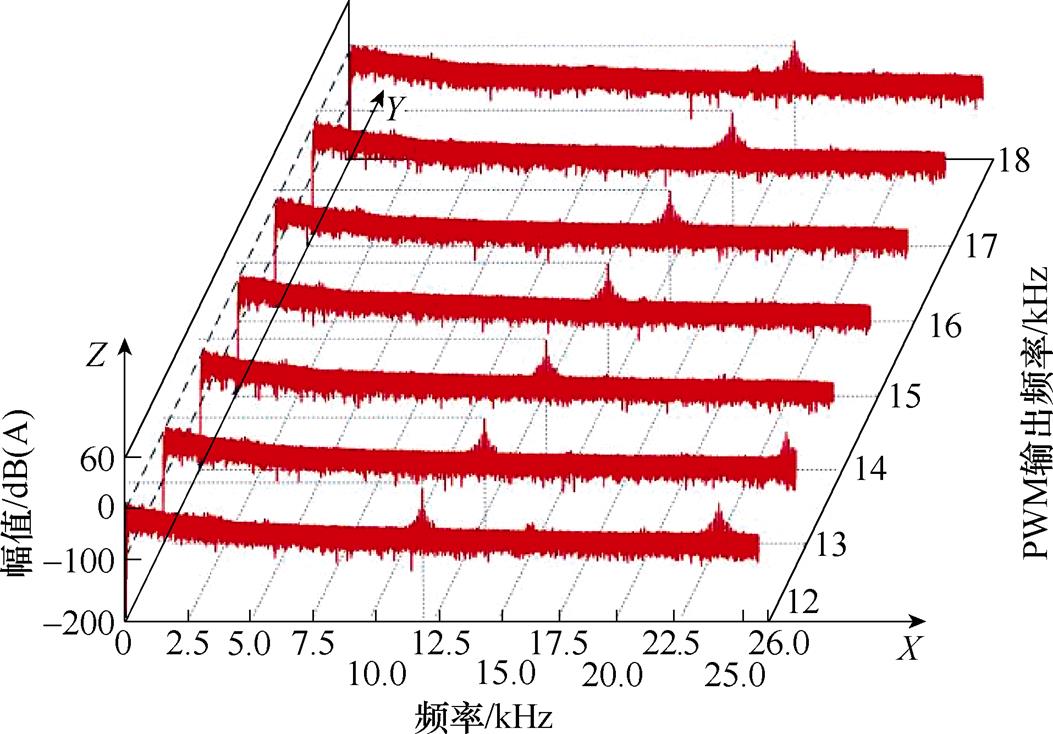
图3 PWM开环控制噪声频谱图
Fig.3 Diagram of PWM open-loop control noise spectrum
电磁开关在实际电流闭环作用下,线圈激励电压占空比会根据误差电流实时调整,这一变化势必引起激励电压频谱的动态变化。如图4a~图4d所示分别为PWM频率10kHz、15kHz、18kHz、23kHz,占空比分别为50%、20%、5%下线圈方波励磁电压的傅里叶分析,对比可知:同一PWM频率下,改变占空比会使励磁电压频谱分布发生变化;相同占空比下,改变PWM激励频率,其频谱分布会发生转移。因此,电磁开关在电流闭环控制下,即使采用高于人耳可听范围的PWM频率进行激励,也不能将声音频谱完全移出人耳敏感频段之外,在其稳定保持时依然会产生明显的可听噪声,这主要是由于闭环控制下占空比的实时动态调整导致了部分声音频谱分散到低频段的缘故。
综上分析,要对高频闭环激励下的电磁开关保持噪声进行抑制,需要同时采取三项措施:①选择合适的PWM控制方式,尽量降低线圈电流纹波;②采用固定的高于人耳可听范围的PWM频率进行激励,使噪声频谱的主要频段分布在人耳可听范围之外;③禁止占空比动态变化,防止部分噪声频谱向低频带转移。综合以上三项措施,方能使噪声频谱稳定分布在人耳敏感频段之外,实现保持噪声的抑制。针对措施①和②可以选择固定频率的PID控制器,并合理配置其参数来实现,而措施③禁止占空比动态变化虽可实现噪声抑制,但同时也失去了线圈电流的闭环调节能力,噪声抑制与电流闭环调节相互矛盾,因此,如何设计控制方案来兼顾线圈电流的动态闭环调节及保持过程噪声抑制,是本文要解决的主要问题。
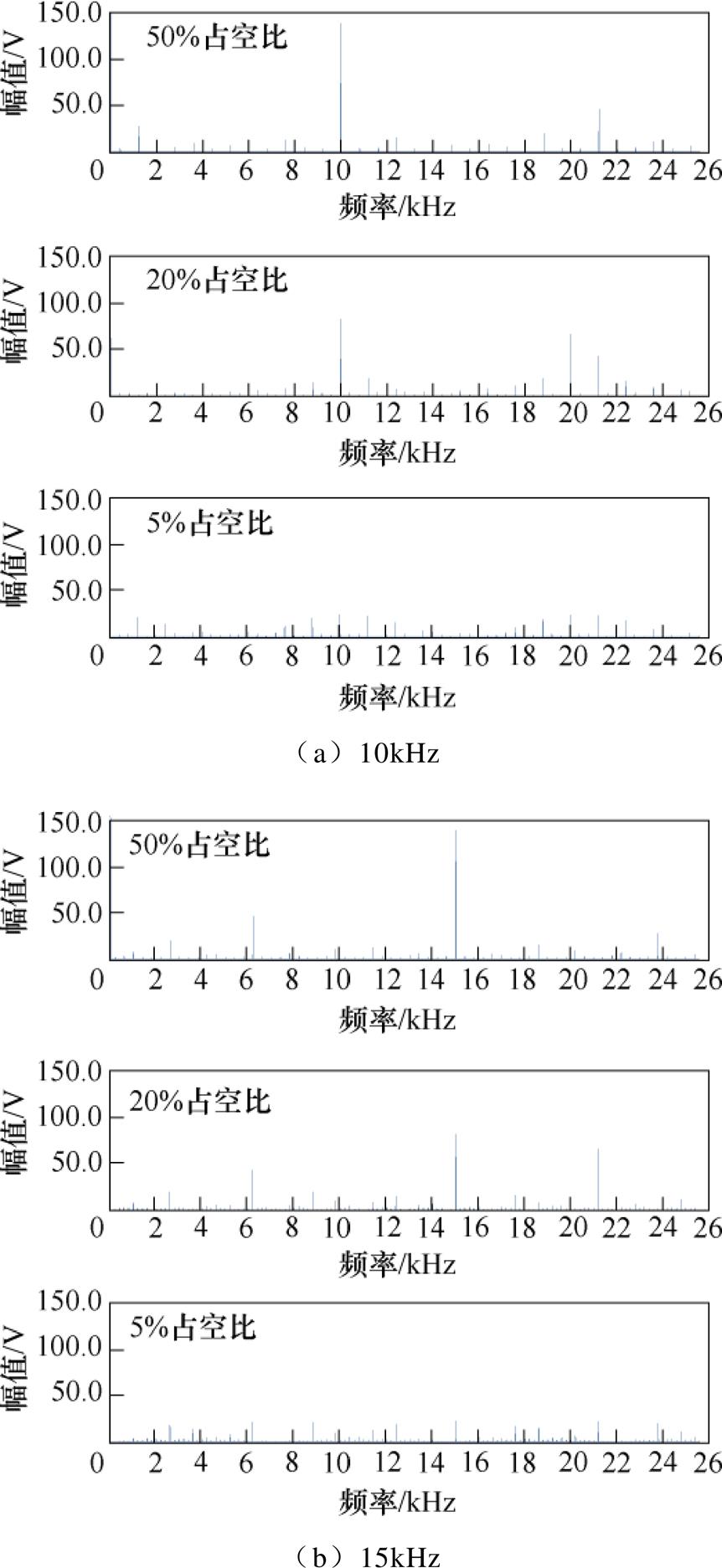
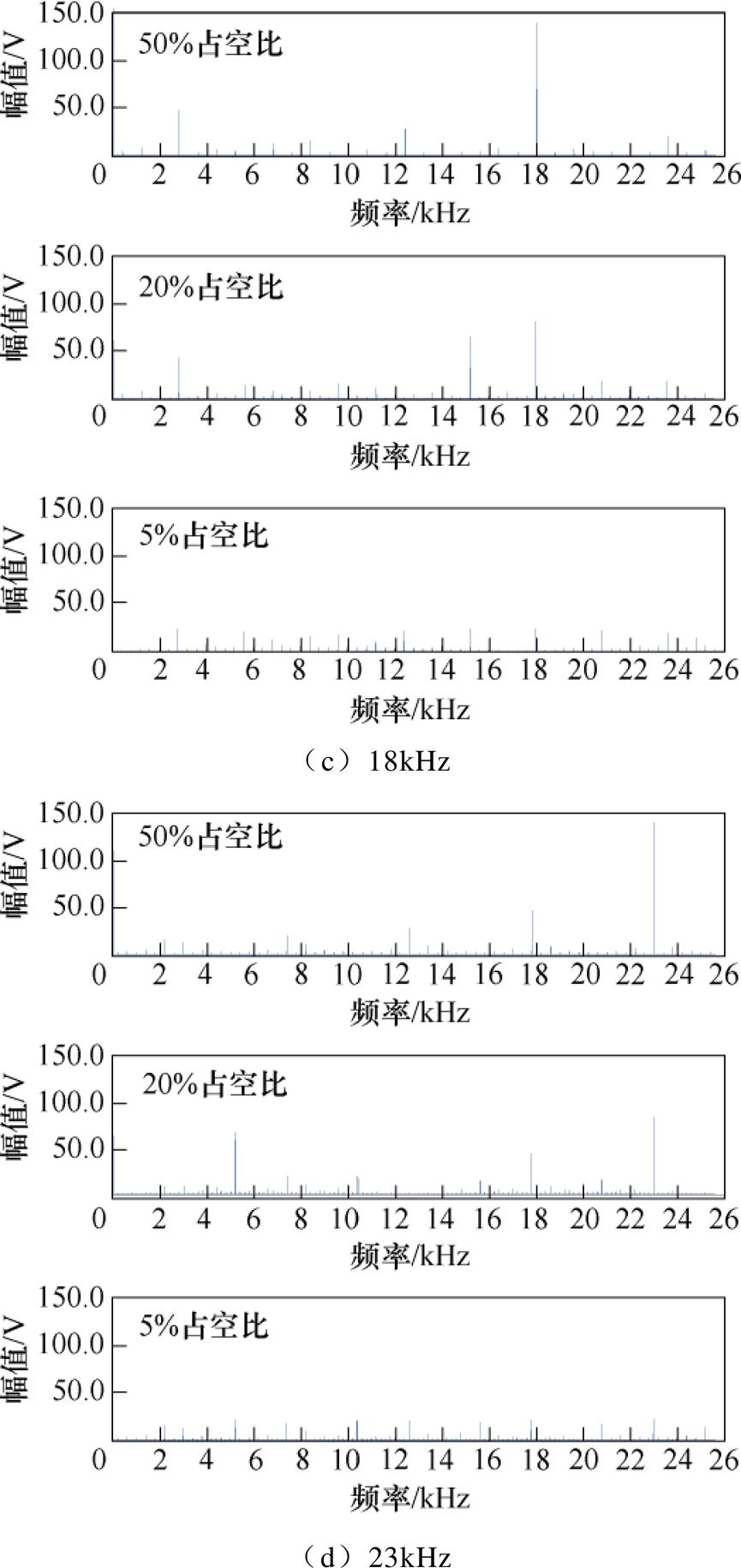
图4 方波励磁电压傅里叶分析
Fig.4 Fourier analysis diagram of square wave excitation voltage
经分析,构建基于模糊控制的电磁开关高频噪声抑制方案,整体实现原理如图5所示。电流传感器检测线圈电流icoil,与参考电流iref比较产生误差信号e,一方面e经过Ke放大及限幅函数1作用,得到信号ei;另一方面e经过微分得到误差变化率ec,之后经Kec放大及限幅函数2作用,得到信号eci。ei及eci作为模糊控制器的输入,模糊控制器根据ei及eci的范围来选择合适的PWM控制方式。当ei及eci较大时,选择on/off控制方式来快速更新PWM占空比D,提高线圈电流的动态响应速度,使线圈电流值快速跟踪参考值,降低误差;当ei及eci适中时,选择自整定PID工作方式来更新占空比D,自整定PID可以根据不同电磁开关的保持过程自适应调整PID参数,使占空比相对动态恒定;当ei及eci足够小时,选择伪开环控制方式来更新占空比D,在伪开环控制中,系统计算上阶段自整定PID几个周期的平均占空比,得到 ,将赋给D,电磁开关在该恒定占空比激励下稳定保持,实现保持噪声的抑制。同时,电流控制闭环退化为监测环:当ei始终位于设定的足够小范围内时,则PWM发生器始终工作于固定占空比状态,当ei超出设定的足够小阈值时,则根据模糊控制器的规则重新选择相应的PWM闭环控制方式。该方案通过模糊控制器中不同PWM控制方式的合理切换,实现了线圈电流快速动态闭环调节及高频噪声抑制的有效 兼顾。
,将赋给D,电磁开关在该恒定占空比激励下稳定保持,实现保持噪声的抑制。同时,电流控制闭环退化为监测环:当ei始终位于设定的足够小范围内时,则PWM发生器始终工作于固定占空比状态,当ei超出设定的足够小阈值时,则根据模糊控制器的规则重新选择相应的PWM闭环控制方式。该方案通过模糊控制器中不同PWM控制方式的合理切换,实现了线圈电流快速动态闭环调节及高频噪声抑制的有效 兼顾。
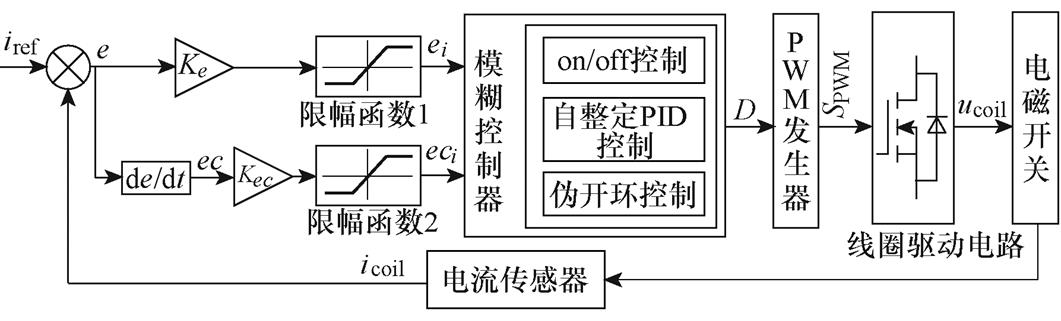
图5 基于模糊控制的电磁开关高频噪声抑制原理
Fig.5 Principle of high-frequency noise suppression of electromagnetic switch based on fuzzy control
模糊控制器原理如图6所示。采用双输入单输出(Double Input Single Output, DISO)模糊控制器,以ei及eci为输入,根据模糊规则选择不同的PWM控制方式来更新模糊控制器的输出D。对于本文DISO模糊控制系统,为了平衡控制精度与运算速度,两个输入变量语言值集合都选为{S、M、L},即{小、中、大}。如图7a和图7b所示,ei及eci各模糊语言的隶属度函数选用典型的三角形,表达式如式(5)、式(6)所示。创建完成输入语言值的隶属度函数后即可将输入变量ei及eci的实际数值转换成对应语言值的隶属度,即模糊化处理。
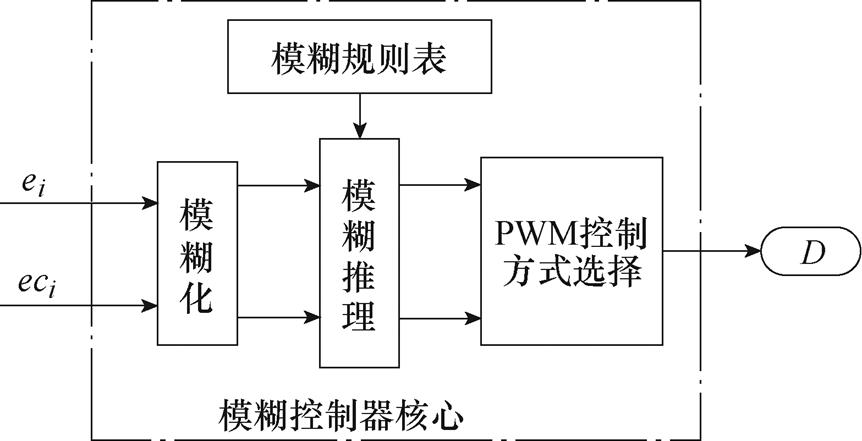
图6 模糊控制器原理
Fig.6 Principle of fuzzy controller
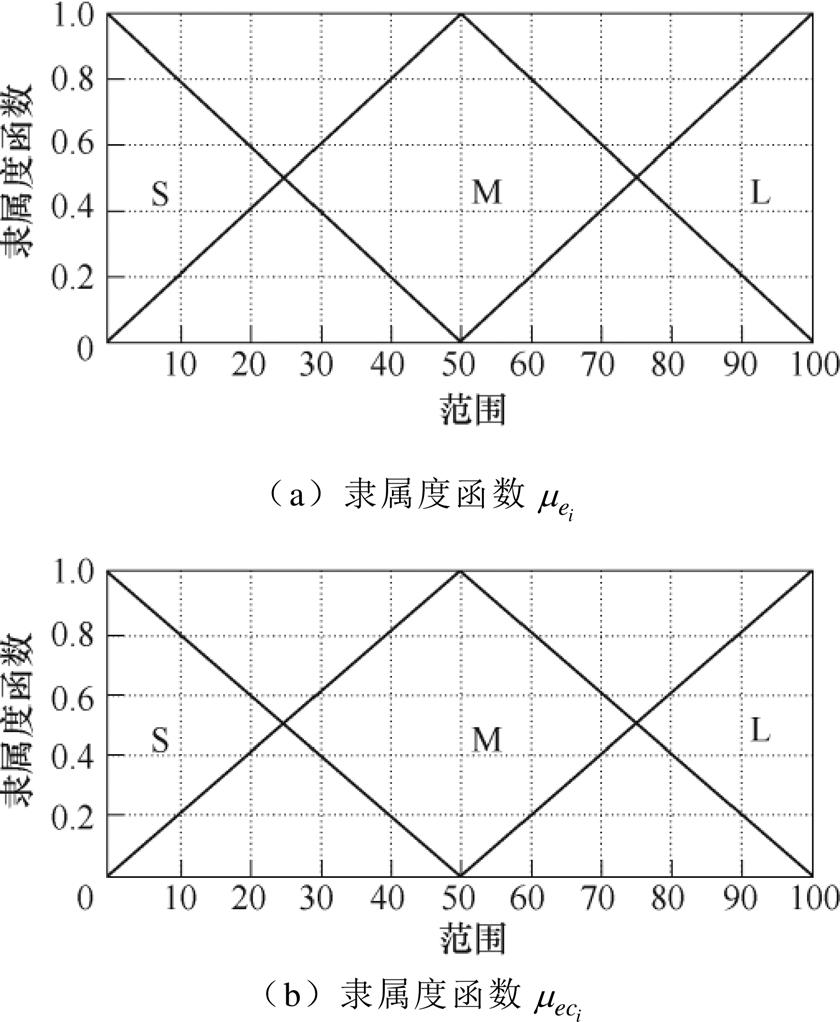
图7 输入变量隶属度函数
Fig.7 Input variable membership function
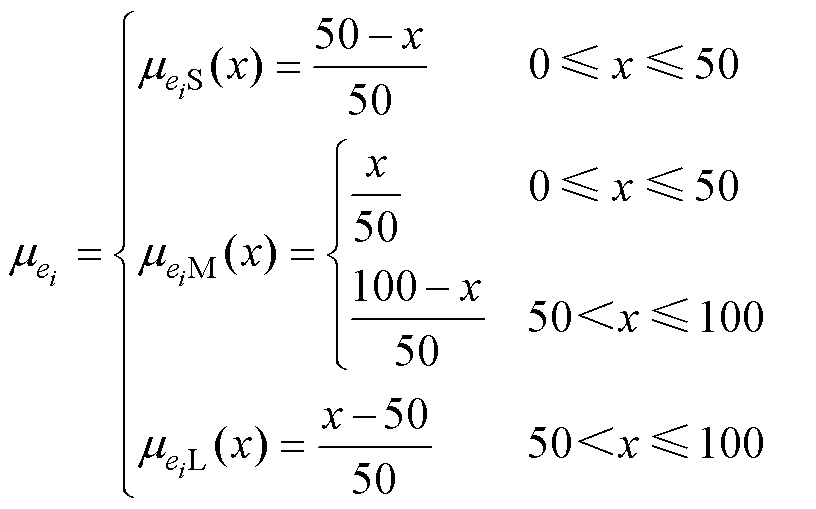 (5)
(5)
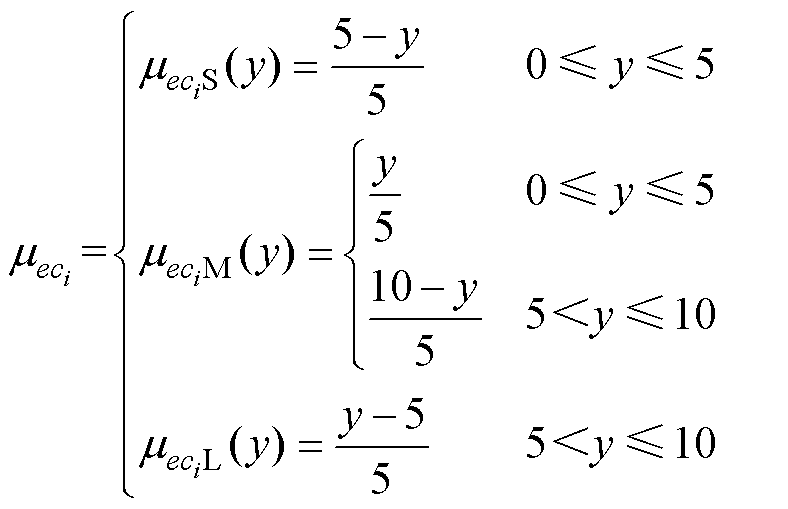 (6)
(6)
根据控制经验设计模糊规则,见表1,两个输入变量之间的聚合关系构成规则前件,PWM控制方式的选择作为规则后件,构建模糊规则表。选择“与(最小值)”运算来计算聚合规则前件的真值,每条聚合规则前件的隶属度计算公式为
 (7)
(7)
式中, 为规则i聚合前件的隶属度。
为规则i聚合前件的隶属度。
表1 模糊规则
Tab.1 Fuzzy rule

模糊规则电流误差ei SML 误差变化率eciS自整定PID M自整定PIDon/off L自整定PIDon/off
以第1条规则为例:
FR1:IF eiIS S,AND eci IS S, THEN 。
。
该规则表示:如果线圈电流误差较小且误差变化率也较小,则PWM选择伪开环工作方式,其占空比固定为 ,符合控制经验。
,符合控制经验。
依据操作经验,一共构造了9条模糊规则,对于每个由输入语言变量构成的前件关系,均存在一条对应的模糊规则,因此,模糊规则表具有一致性、连续性和完备性,为PWM控制方式的有效切换提供保障。执行模糊推理前,模糊控制器根据相应聚合规则前件的隶属度,使用后件蕴含方法对每个输出语言变量的隶属函数进行换算,以确定该条规则的实际隶属度。本文模糊控制器后件部分为三种待选的PWM控制方式,类似于单点模糊集合,每个单点均为一种对应的PWM控制方式,其隶属度均为1。后件蕴含方法选择“最小值”蕴含,即:模糊逻辑控制器在对应聚合规则前件隶属度位置截断输出隶属函数,计算公式为
 (8)
(8)
式中, 为第i条规则的隶属度。
为第i条规则的隶属度。
由图7中的2个输入变量隶属度函数可以看出,每个输入变量的精确值通常属于1个以上的模糊语言值,因此每对输入变量(ei, eci)的精确值最多激活4条模糊规则,根据对应的模糊规则表及式(8),对每条激活规则的隶属度进行计算,之后对所有激活规则的隶属度进行整合,这一过程称为模糊推理,本文采用模糊蕴含“取小”后再“取大”整合,计算公式为
 (9)
(9)
式中, 为整合后的隶属度函数;r为激活的规则数。
为整合后的隶属度函数;r为激活的规则数。
由于每条规则的后件隶属度均为1,根据式(9)整合后的隶属度势必等于激活的所有规则的最大隶属度,之后索引该最大隶属度规则的后件作为所选的PWM控制方式,并将占空比信号输出到D,即完成基于模糊逻辑的PWM控制方式的切换。
常用的离线式PID参数整定困难,且难以适配不同电磁开关的运行状态,故引入继电反馈自整定技术,实现PID控制参数在线自整定,便于实现不同电磁开关保持状态下占空比的动态恒定。
如图8所示为自整定PID结构框图,基本思路是在电磁开关控制系统中设置三个阶段:第一阶段是PI控制;第二阶段是继电反馈自整定;第三阶段是PID控制。
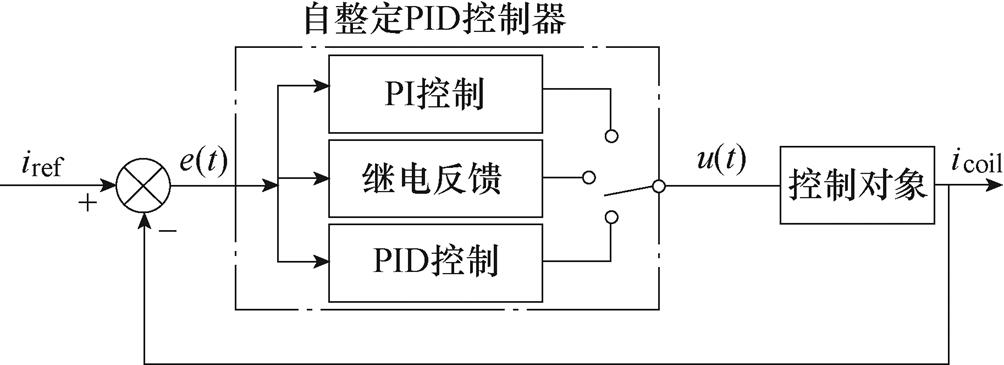
图8 自整定PID结构框图
Fig.8 Control topology of self-tunning PID
电磁开关在进入保持过程初期,首先进行PI闭环控制来调节线圈电流逼近设定参考值;然后进行继电反馈自整定过程,设置自整定参数,包括控制器类型、继电周期数、继电振幅等。自整定过程由继电环节作用发出继电方波信号,对继电输出方波信号u(t)进行谐波分析,其傅里叶级数表达式为
 (10)
(10)
式中,A0为直流分量;An、Bn分别为基波及各次谐波分量幅值,描述为
 (11)
(11)
 (12)
(12)
在方波信号的持续作用下,线圈电流处于周期性振荡,此时测取每个继电周期的线圈电流响应曲线的振荡幅值与振荡周期,然后在达到所设继电周期数时计算一次其平均振荡幅值a与平均振荡周期T,如此反复。
采用描述函数法对该非线性系统进行分析。非线性的继电描述函数定义为正弦输入信号作用下,非线性环节的稳态输出中一次谐波分量和输入信号的复数比,用N(A)表示,有
 (13)
(13)
忽略高次谐波得继电输出傅里叶表达式为
 (14)
(14)
其中
 (15)
(15)
 (16)
(16)
 (17)
(17)
式中,d为回环幅值。
将式(16)、式(17)代入到式(13)得继电描述函数为
 (18)
(18)
将计算所得平均振荡幅值a代入继电描述函数式(18)中得
 (19)
(19)
闭环系统产生极限环振荡的条件为
 (20)
(20)
将式(19)代入到式(20)得频率响应在振荡频率点处估计值为
 (21)
(21)
式中,w 为频率, 。
。
在描述函数分析中, 的奈氏曲线与负实轴的交点称为临界点,故对应的频率可估计为临界频率,即
的奈氏曲线与负实轴的交点称为临界点,故对应的频率可估计为临界频率,即 ,进而可知临界周期为
,进而可知临界周期为 ,考虑到量测噪声,这里增设了过程变量噪声干扰n,得临界增益为
,考虑到量测噪声,这里增设了过程变量噪声干扰n,得临界增益为
 (22)
(22)
最后,将计算所得临界增益Ku以及临界周期Tu代入到表2 Ziegler-Nichols整定中,整定出PID控制参数,分别为比例调节系数Kp、积分时间常数Ti、微分时间常数Td。
表2 Ziegler-Nichols整定
Tab.2 Ziegler-Nichols tuning
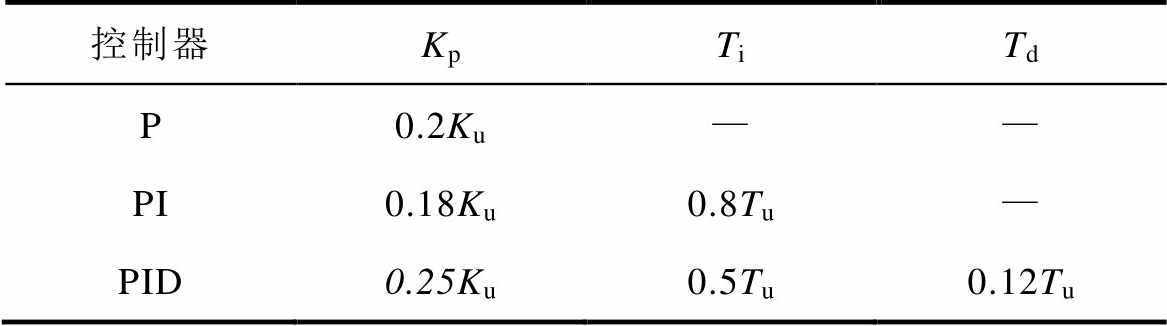
控制器KpTiTd P0.2Ku—— PI0.18Ku0.8Tu— PID0.25Ku0.5Tu0.12Tu
如此反复,待整定所得控制参数趋于稳定,认为整定完成,此时将整定好的控制参数输入给标准PID控制器并切换至PID控制,通过PID算法计算出PWM信号的输出占空比,至此继电反馈自整定PID控制过程完成。采用继电反馈PID自整定控制,可实现不同电磁开关保持电流控制参数的在线自整定,避免繁琐的人工整定过程,使稳定保持时占空比动态变化小、方便计算均值、吸持噪声较小。
电磁开关在稳定保持过程中,PID参数经在线自整定后,保持占空比动态恒定(在一定值附近微调),为伪开环控制提供了基础。为将噪声频谱完全移出人耳敏感频段,实现保持噪声有效抑制,电磁开关保持过程需工作在固定占空比状态,即开环状态,但同时又必须兼顾线圈电流的动态调节能力,因此本文提出了保持过程伪开环控制:PID参数经自整定后,线圈电流误差较小,当电流误差在所设阈值范围内时,自动计算自整定PID当前工况下输出闭环占空比平均值,并固定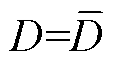 。同时,电流闭环退化为监测环:当电流误差始终位于设定的足够小范围内时,则PWM发生器始终工作于固定占空比状态,实现保持噪声的抑制;当电流误差超出设定的足够小数值时,则根据模糊规则重新选择PWM控制方式。
。同时,电流闭环退化为监测环:当电流误差始终位于设定的足够小范围内时,则PWM发生器始终工作于固定占空比状态,实现保持噪声的抑制;当电流误差超出设定的足够小数值时,则根据模糊规则重新选择PWM控制方式。
利用Multisim及Labview构建集电磁开关动态、线圈驱动、控制策略一体的联合仿真模型[24-25],验证控制效果。相关仿真参数设置如下:综合考虑实际开关管损耗以及人耳可听噪声频段噪声,将PWM频率设为20kHz,起动参考电流设为3A,保持参考电流设为0.5A。
如图9a所示为继电反馈自整定PID控制策略仿真波形。t0时刻开始起动,(t0, t1) 为on/off控制的起动过程,即当icoil<iref时,PWM占空比输出100%,当icoil>iref时,PWM占空比输出0%,驱动控制电路在励磁状态与续流状态之间切换,(t1, t5)为保持过程,(t1, t3) 为PI电流闭环控制过程,t1时刻,线圈电流开始下降,此时PWM输出占空比为0%,待t2时刻线圈电流趋于保持电流参考值,PI作用使得线圈电流逼近于保持电流参考值附近,t3时刻进入继电反馈自整定,如图9b所示为继电反馈自整定过程局部放大图,通过持续继电环节作用使线圈电流响应产生周期性等幅振荡,整定过程测取每个继电周期的电流振荡幅值与振荡周期,在达到所设继电周期数时计算平均振荡幅值与平均振荡周期,进而计算临界增益与临界周期,整定出控制参数,待整定控制参数趋于稳定,判定为整定完成,t4时刻将整定好的控制参数输入给PID控制器并切换至PID控制,从图9c中PID控制过程放大图可知,继电反馈自整定参数下的PID控制,其输出占空比在6%附近范围内微小变化,占空比变化稳定,有利于电磁开关运行噪声的抑制。

图9 自整定PID仿真波形
Fig.9 Simulation waveforms of self-tuning PID
采用继电反馈自整定PID,一方面不需要操作人员具备相关经验,减少参数整定时间;另一方面自整定所得参数其控制系统动态响应性能更优,PWM输出占空比在有限范围内微调,占空比变化相对更加稳定,作用于电磁开关的电感性线圈上,从而削弱电磁开关的振动噪声。
如图10所示为采用模糊推理自适应控制策略仿真波形。整个控制过程以模糊推理算法为基础,充分结合on/off控制、自整定PID控制以及伪开环控制的优势,根据电磁开关实际运行状态,通过模糊推理选择不同的PWM控制方式。t0时刻开始起动,(t0, t1) 为起动过程on/off控制,提高线圈电流动态调节速度。(t1, t5) 为保持过程,(t1, t2) 为继电反馈自整定PID控制,自整定过程与3.1所述一致,整定完后转入PID控制,当线圈电流误差在阈值范围内时,自动计算自整定PID输出占空比平均值,并将该平均值作为伪开环控制的输入。为验证模糊控制切换效果,在t3时刻将保持电流参考值设为0.7A,持续时间0.1s,此时模糊控制器根据线圈电流误差及误差变化率迅速切换至on/off控制方式,PWM占空比上升至100%,快速跟踪电流,由图10中细节放大图可知,在跟踪上线圈电流后,模糊控制又切换至PID控制,待电流误差降至阈值范围内自动重新计算平均占空比作为伪开环输入,在线圈电流误差及其变化率稳定后,模糊控制器进而切换至伪开环控制。t4时刻,将保持电流参考值降至0.5A,PWM输出占空比为0%,线圈电流缓慢下降,模糊控制器根据线圈电流误差及其变化率重新合理选择PWM控制方式。t5时刻,驱动电路切换至退磁状态,迫使线圈电流快速下降,电磁开关迅速分断。
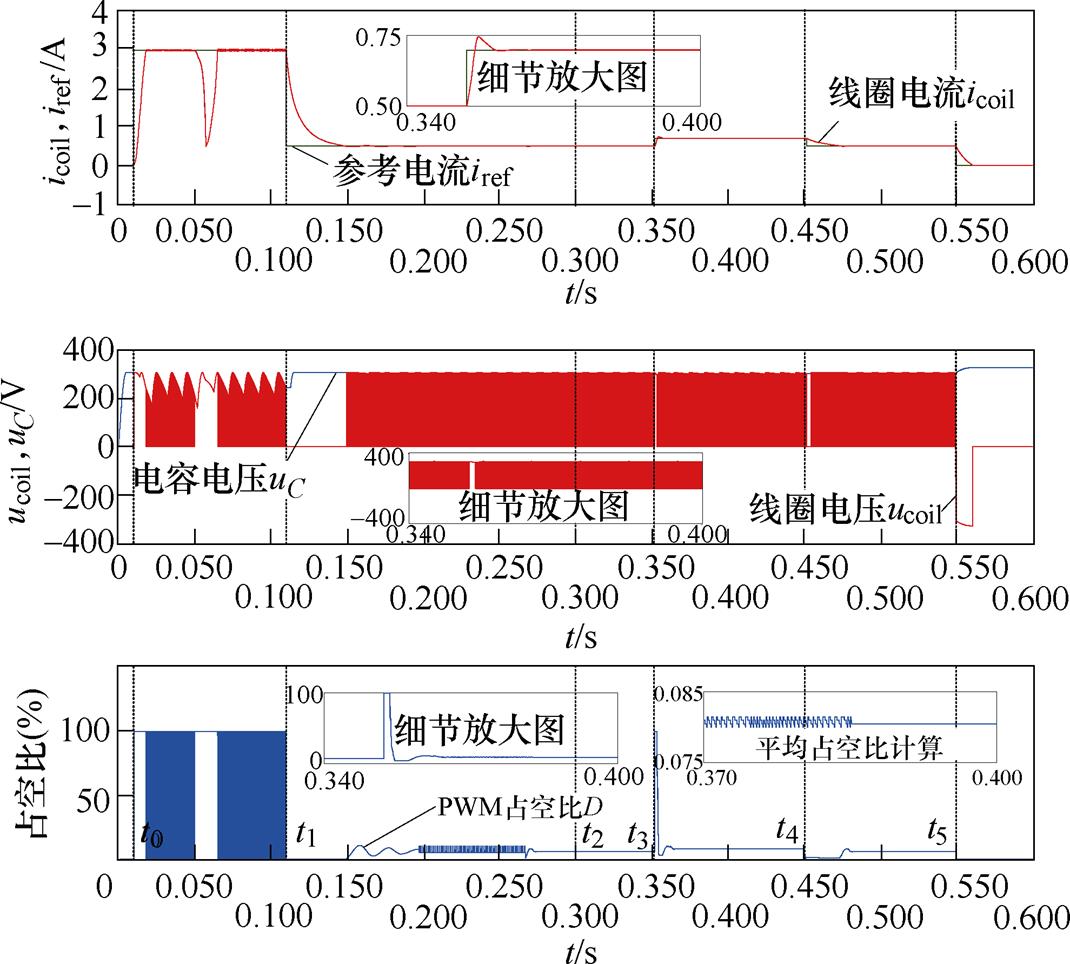
图10 模糊推理自适应控制仿真波形
Fig.10 Simulation waveforms of fuzzy adaptive control
以NI CompactRIO为核心开发如图11所示的电磁开关快速控制原型验证系统框图,实现电磁开关噪声与振动测量并对控制策略进行验证。数据采集部分采用CompactRIO配套的ADC模块,主要采集线圈电流、线圈高频电压、三轴振动信号、噪声信号等[26-27]。利用配套的C系列数字输出模块输出PWM信号,根据控制策略控制驱动电路的开关管通断,进而控制接触器的吸合与分断。为减小测量声场其他因素干扰,在对电磁开关进行电磁噪声测量时,将电磁开关放置于消声箱中。噪声测量采用GRAS公司生产的40PH阵列式麦克风,灵敏度50mV/Pa,频带范围最高可达20kHz,动态响应可达范围135dB左右,内部集成恒流电源(Constant Current Power, CCP)前端放大器,搭配具有集成电路压电式(Integrated Electronics Piezo-Electric, IEPE)信号调理和抗混叠滤波功能的NI C系列采集模块进行高精度测量;软件上对采集到的噪声信号进行工程单位转换并A计权滤波处理。

图11 快速控制原型验证系统框图
Fig.11 Block diagram of rapid control prototype verification system
模糊推理自适应控制实验波形如图12所示。如图12a所示为实验过程波形,起动电流设为1A、保持电流设为0.5A、开关频率设为20kHz。(t0, t1)为电磁开关起动过程,(t1, t2) 为保持过程,t2时刻分断。为验证模糊自适应控制策略对电磁开关在不同运行环境下切换效果及高频吸持噪声抑制的自适应性,在tx时刻,将保持电流参考值突变为0.7A。如图12b所示为对t =2s至t =4.5s时间段电磁开关工作过程时域波形放大图,由图可知,tx时刻模糊控制器根据线圈电流误差及其变化率切换为on/off控制方式,线圈电流快速跟踪至0.7A,跟踪过程存在噪声,随即又切为PID控制并重新计算占空比平均值转为伪开环控制,快速抑制高频吸持噪声。ty时刻,保持参考电流设为0.5A,线圈电流下降,并最终转为伪开环控制。整个控制过程兼顾了线圈电流快速动态闭环调节及高频吸持噪声的有效抑制。
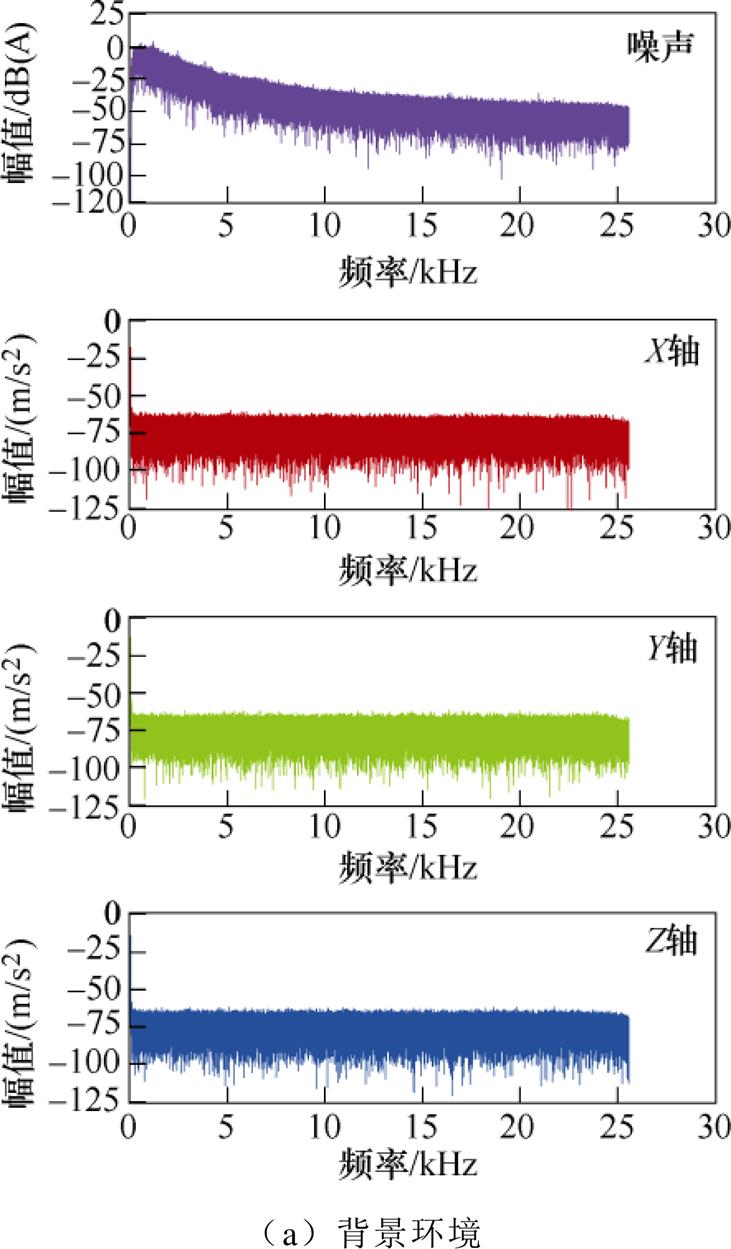
如图13所示传感器采集噪声与振动信号的频谱图。图13a为背景环境下噪声与振动信号的频谱图,图13b为电磁开关在on/off闭环控制下的振动与噪声频谱图,由图可知,开关在on/off控制下存在不同频率的振动及吸持噪声,噪声频段主要在5~10kHz;图13c为采用模糊推理自适应控制策略时的噪声与振动频谱图,稳定吸持条件下,线圈电流及其变化率都足够小,模糊控制器选择伪开环控制方式,固定的PWM占空比及20kHz输出频率,使得吸持噪声及振动稳定在20kHz,被移出人耳可听敏感频段。
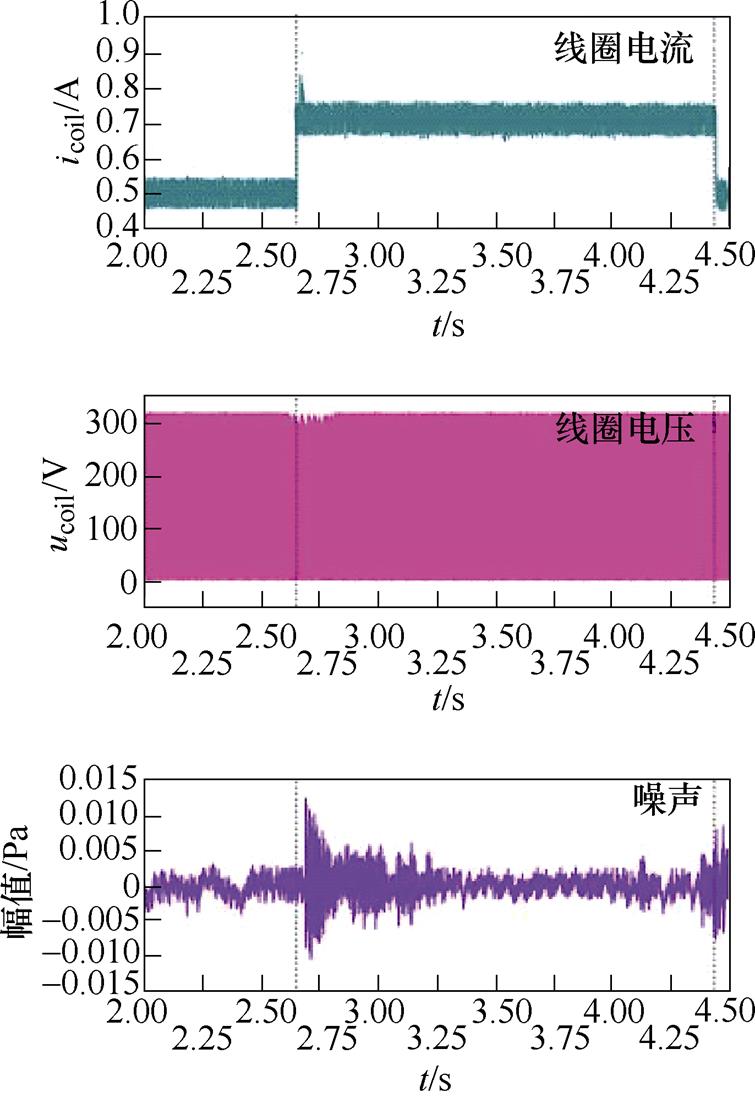

图12 模糊推理自适应控制实验波形
Fig.12 Experiment waveforms of fuzzy adaptive control
如图14所示为on/off控制与模糊自适应控制下电磁开关高频吸持噪声的1/3倍频程分析对比实验结果。分析选取电磁开关吸持过程中某段吸持噪声,将各频带能量进行求和,on/off控制下总频带能量为44.8dB(A),模糊自适应控制下总频带能量为28.6dB(A),相比之下,采用模糊自适应控制策略总频带能量减小了16.2dB(A),且主要削减了5~10kHz频段的高频吸持噪声,证明所提控制策略对高频噪声的有效抑制。
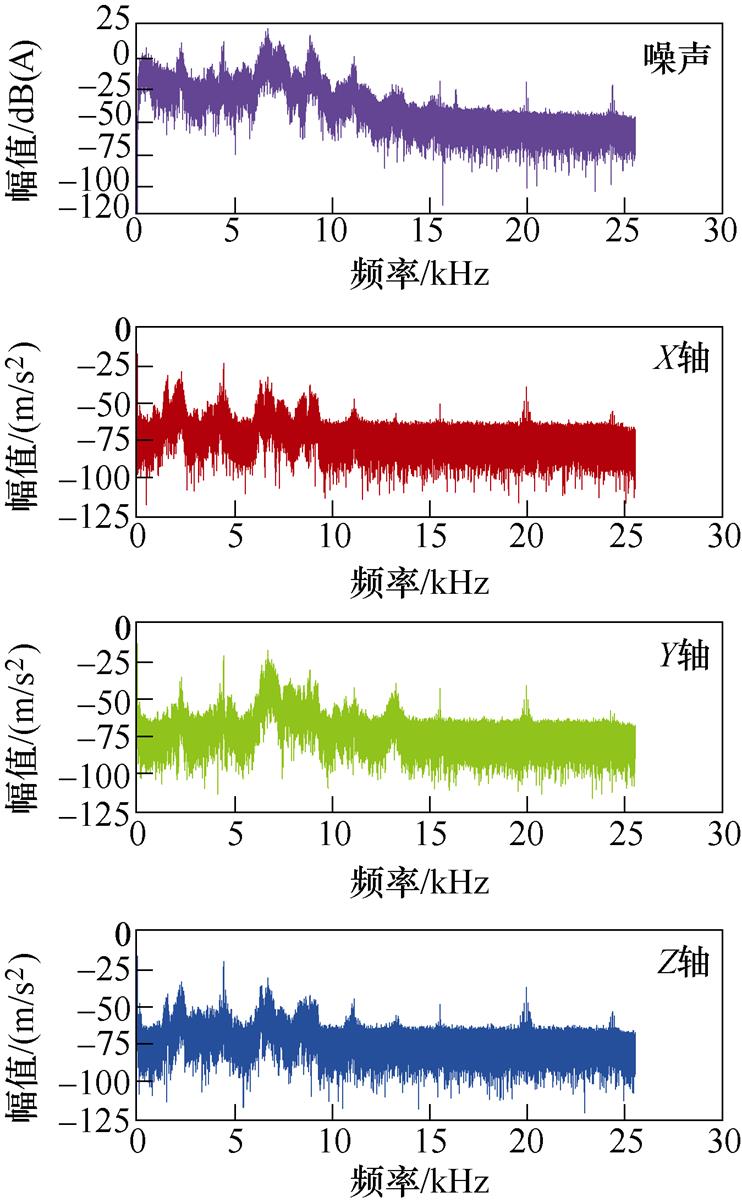
(b)on/off闭环控制
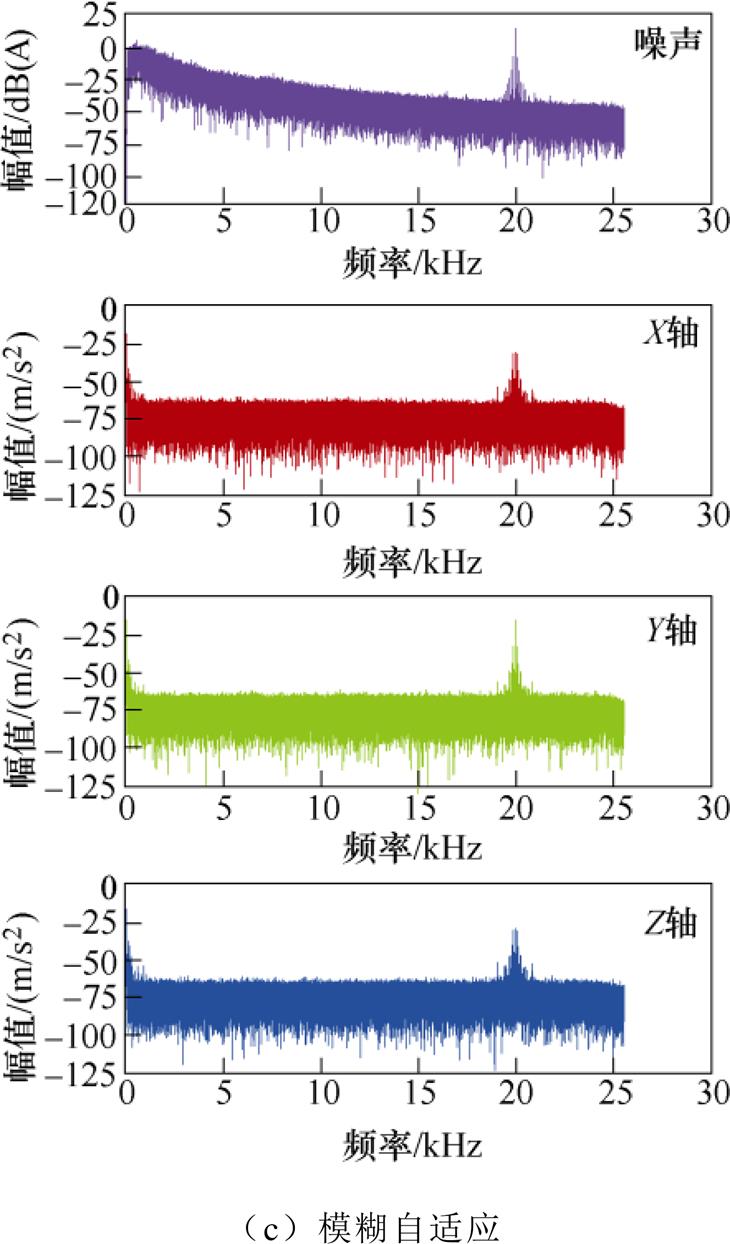
图13 噪声与振动频谱图
Fig.13 Noise and vibration spectrogram
本文针对电磁开关高频闭环励磁下产生的吸持噪声问题,提出一种基于模糊控制的电磁开关高频吸持噪声自适应抑制策略,通过仿真分析及实验验证得出以下结论:
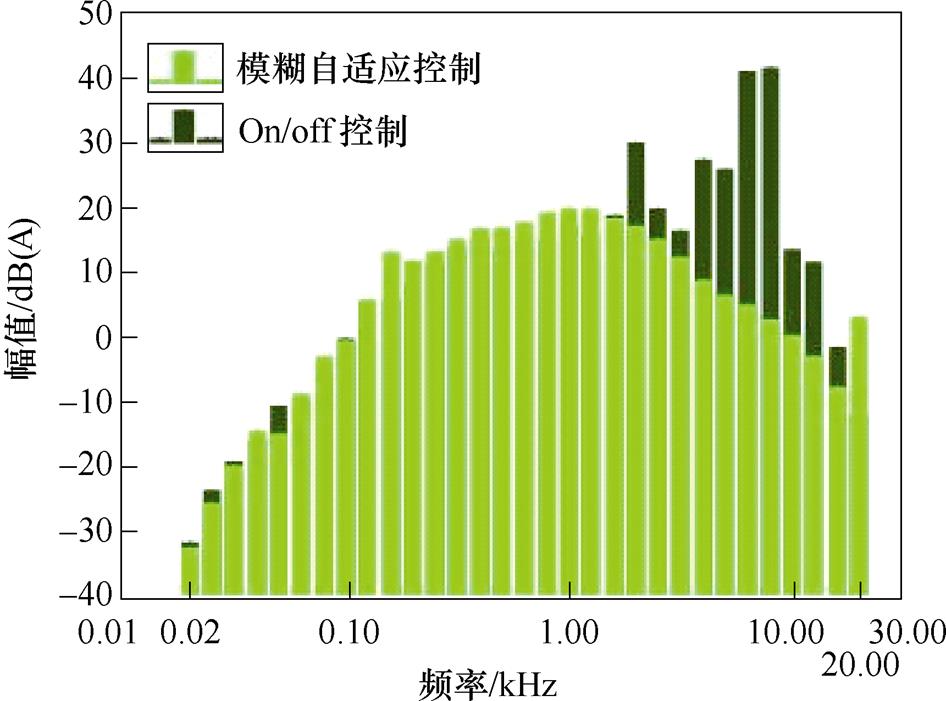
图14 1/3倍频程分析
Fig.14 Third-octave analysis
1)电磁开关在起动过程中及线圈电流误差较大时,PWM控制方式选择on/off,可提高线圈电流的动态调节速度。
2)继电反馈自整定控制可实现不同电磁开关保持过程中PID运行参数的自整定,使保持占空比相对动态稳定,便于计算均值。
3)将电流闭环退化为电流监测环,同时采用恒定占空比输出的伪开环控制模式,可以将噪声频谱移出人耳敏感频段,实现保持噪声抑制。
4)在保持过程中,根据线圈电流误差值及其变化率,采用模糊控制策略,合理地选择不同的PWM控制方式,可充分整合各种控制方式的优点,兼顾线圈电流快速闭环调节及高频噪声抑制。
参考文献
[1] 许志红. 电器理论基础[M]. 北京: 机械工业出版社, 2014.
[2] 张立. 低压电器设备智能化发展探析[J]. 电气技术, 2017, 18(6): 104-110.
Zhang Li. Discussion on intelligent development of low voltage electrical equipment[J]. Electrical Engineering, 2017, 18(6): 104-110.
[3] 张培铭. 智能低压电器技术研究[J]. 电器与能效管理技术, 2019(15): 10-20.
Zhang Peiming. Research on technology of intelligent low voltage electrical apparatus[J]. Electrical & Energy Management Technology, 2019(15): 10-20.
[4] 刘建强, 刘传铎, 王轶欧, 等. 单相PWM整流器IGBT及直流侧电容故障诊断方法[J]. 电工技术学报, 2019, 34(增刊1): 244-257.
Liu Jianqiang, Liu Chuanduo, Wang Yiou, et al. Fault diagnosis method for IGBT and DC-link capacitor of single-phase PWM rectifier[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 244-257.
[5] 纽春萍, 陈德桂, 李兴文, 等. 交流接触器触头弹跳的仿真及影响因素[J]. 电工技术学报, 2007, 22(10): 85-90.
Niu Chunping, Chen Degui, Li Xingwen, et al. Simulation of contact bounce of AC contactor and study of its influence factors[J]. Transactions of China Electrotechnical Society, 2007, 22(10): 85-90.
[6] Liu Yingyi, Chen Degui, Ji Liang, et al. Dynamic characteristic and contact bounce analysis for an AC contactor with PWM controlled coil[C]//Electrical Contacts-2007 Proceedings of the 53rd IEEE Holm Conference on Electrical Contacts, Pittsburgh, PA, 2007: 289-293.
[7] 庄杰榕, 许志红. 智能接触器准临界电流搜索自起动控制[J]. 电机与控制学报, 2019, 23(6): 73-80.
Zhuang Jierong, Xu Zhihong. Self-starting control with quasi-critical current search for intelligent contactor[J]. Electric Machines and Control, 2019, 23(6): 73-80.
[8] Dulk I, Kovacshazy T. Modelling of a linear proportional electromagnetic actuator and possibi- lities of sensorless plunger position estimation[C]// 2011 12th Carpathian Control Conference (ICCC), Czech Republic, 2011: 89-93.
[9] 房淑华, 林鹤云, 蔡彬, 等. 永磁接触器合闸过程的动态仿真及实验[J]. 电工技术学报, 2007, 22(2): 45-50.
Fang Shuhua, Lin Heyun, Cai Bin, et al. Dynamic simulation and experiment for making process of permanent magnet contactor[J]. Transactions of China Electrotechnical Society, 2007, 22(2): 45-50.
[10] 汪先兵, 林鹤云, 房淑华, 等. 永磁接触器位移分段PWM控制及吸合过程动态特性分析[J]. 中国电机工程学报, 2010, 30(3): 113-118.
Wang Xianbing, Lin Heyun, Fang Shuhua, et al. Analysis of displacement subsection PWM control and dynamic characteristic for closing process of permanent magnet contactor[J]. Proceedings of the CSEE, 2010, 30(3): 113-118.
[11] 汤龙飞, 许志红. 交流接触器斜率闭环控制技术[J]. 中国电机工程学报, 2017, 37(3): 956-965.
Tang Longfei, Xu Zhihong. The slope closed-loop control technology of the AC contactor[J]. Pro- ceedings of the CSEE, 2017, 37(3): 956-965.
[12] 李晓华, 赵容健, 田晓彤, 等. 逆变器供电对电动汽车内置式永磁同步电机振动噪声特性影响研究[J]. 电工技术学报, 2020, 35(21): 4455-4464.
Li Xiaohua, Zhao Rongjian, Tian Xiaotong, et al. Study on vibration and noise characteristics of interior permanent magnet synchronous machine for electric vehicles by inverter[J]. Transactions of China Electrotechnical Society, 2020, 35(21): 4455-4464.
[13] 潘超, 衣双园, 蔡国伟, 等. 交直流混杂模式下变压器励磁-振动特性研究[J]. 电工技术学报, 2019, 34(18): 3788-3796.
Pan Chao, Yi Shuangyuan, Cai Guowei, et al. Excitation-vibration characteristics of transformer in AC-DC hybrid operation[J]. Transactions of China Electrotechnical Society, 2019, 34(18): 3788-3796.
[14] 曹辰, 林莘, 金鑫, 等. 基于有限元方法的变压器绕组振动多物理场仿真研究[J]. 变压器, 2018, 55(3): 21-26.
Cao Chen, Lin Xin, Jin Xin, et al. Research on multiphysics simulation of transformer winding vibration based on finite element method[J]. Trans- former, 2018, 55(3): 21-26.
[15] 汲胜昌, 祝令瑜, 沈琪, 等. 换流站用交流滤波电容器的噪声试验与仿真[J]. 高电压技术, 2011, 37(12): 2897-2903.
Ji Shengchang, Zhu Lingyu, Shen Qi, et al. Experi- ment and simulation of audible noise for AC filter capacitor used in converter station[J]. High Voltage Engineering, 2011, 37(12): 2897-2903.
[16] 祝令瑜, 汲胜昌, 曹涛, 等. 电容器噪声传播规律的研究[J]. 电力电容器与无功补偿, 2013, 34(6): 50-55.
Zhu Lingyu, Ji Shengchang, Cao Tao, et al. Study on propagation law of capacitor audible noise[J]. Power Capacitor & Reactive Power Compensation, 2013, 34(6): 50-55.
[17] 师愉航, 李金宇, 汲胜昌, 等. 交流滤波电容器振动噪声特性及声场控制研究[J]. 电力电容器与无功补偿, 2017, 38(1): 65-70.
Shi Yuhang, Li Jinyu, Ji Shengchang, et al. Study on vibration and noise characteristics of AC filter capacitor and acoustic field control[J]. Power Capacitor & Reactive Power Compensation, 2017, 38(1): 65-70.
[18] 刘和平, 刘庆, 张威, 等. 电动汽车用感应电机削弱振动和噪声的随机PWM控制策略[J]. 电工技术学报, 2019, 34(7): 1488-1495.
Liu Heping, Liu Qing, Zhang Wei, et al. Random PWM technique for acoustic noise and vibration reduction in induction motors used by electric vehicles[J]. Transactions of China Electrotechnical Society, 2019, 34(7): 1488-1495.
[19] 陈首虹, 杨建红, 范伟, 等. 交流接触器振动噪声测量方法及系统开发[J]. 华侨大学学报 (自然科学版), 2019, 40(4): 429-436.
Chen Shouhong, Yang Jianhong, Fan Wei, et al. Vibration and noise measurement method of AC contactor and system development[J]. Journal of Huaqiao University (Natural Science), 2019, 40(4): 429-436.
[20] 赵建, 鲍光海. 交流接触器振动噪声故障在线检测[J]. 电器与能效管理技术, 2018(18): 53-57.
Zhao Jian, Bao Guanghai. On-line detection of AC contactor based on vibration and noise fault[J]. Electrical & Energy Management Technology, 2018(18): 53-57.
[21] 张雄清, 林毅, 戴涛. 电磁式接触器智能控制模块设计及试验[J]. 电气技术, 2011, 12(2): 44-46.
Zhang Xiongqing, Lin Yi, Dai Tao. The design of electromagnetic contact with intelligent control module[J]. Electrical Engineering, 2011, 12(2): 44-46.
[22] 庄杰榕, 许志红. 电磁接触器多变量反馈吸持控制策略的研究[J]. 中国电机工程学报, 2019, 39(5): 1516-1526.
Zhuang Jierong, Xu Zhihong. The multivariate feedback control strategy for electromagnetic contactor holding[J]. Proceedings of the CSEE, 2019, 39(5): 1516-1526.
[23] 庄杰榕, 许志红. 智能电磁接触器自抗扰电流模型预测控制[J]. 电工技术学报, 2018, 33(23): 5449- 5458.
Zhuang Jierong, Xu Zhihong. The active disturbance rejection with current model predictive control for intelligent electromagnetic contactor[J]. Transactions of China Electrotechnical Society, 2018, 33(23): 5449-5458.
[24] Tang Longfei, Han Zhiping, Xu Zhihong. Neural network-based co-simulation technology for intel- ligent contactors[J]. IEEE Transactions on Magnetics, 2020, 56(2): 8000108.
[25] Tang Longfei, Xu Zhihong, Venkatesh B. Contactor modeling technology based on an artificial neural network[J]. IEEE Transactions on Magnetics, 2018, 54(2): 4900108.
[26] Barrera E, Ruiz M, Bustos A, et al. Implementation of ITER fast plant interlock system using FPGAs with CompactRIO[J]//IEEE Transactions on Nuclear Science, 2018, 65(2): 796-804.
[27] Bourhnane S, Lghoul R, Zine-Dine K, et al. Real-time control of smart grids using NI CompactRIO[C]//2019 International Conference on Wireless Technologies, Embedded and Intelligent Systems (WITS), Morocco, 2019: 1-6.
Suppression Strategies of Electromagnetic Switch High-Frequency Holding Noise
Abstract The problem of high-frequency holding noise caused by electromagnetic switch under PWM closed-loop control is studied, and an adaptive control strategy for electromagnetic switch high-frequency holding noise is proposed in this paper. Firstly, the mechanism of electromagnetic switch high-frequency closed-loop noise is analyzed, and three measures are proposed to suppress the high-frequency noise. Secondly, according to the actual operation characteristics of electromagnetic switch, an adaptive suppression strategy of electromagnetic switch high-frequency holding noise based on fuzzy control is designed. By integrating the advantages of on/off control, self-tuning PID control and pseudo open-loop control, the noise suppression measures are implemented. Finally, the electromagnetic switch co-simulation model is constructed, and the rapid control prototype verification system of electromagnetic switch based on CompactRIO is developed. The frequency domain analysis of electromagnetic switch noise and vibration signal is carried out, and the control strategy is verified. Simulation and experimental results show that the proposed control strategy can effectively suppress the high-frequency holding noise of electromagnetic switch.
keywords:PWM closed-loop control, high-frequency holding noise, fuzzy control, self-tuning PID, electromagnetic switch
DOI: 10.19595/j.cnki.1000-6753.tces.201337
中图分类号:TM572
汤龙飞 男,1987年生,博士,副教授,研究方向为智能电器及其在线监测。E-mail: tlftel@qq.com
许志红 女,1963年生,教授,博士生导师,研究方向为智能电器及其在线监测。E-mail: 641936593@qq.com(通信作者)
收稿日期 2020-10-09
改稿日期 2020-11-02
国家自然科学基金项目(51707039)和福建省教育厅中青年教师教育科研项目(JAT190038)资助。
(编辑 崔文静)