图1 FSBB变换器拓扑
Fig.1 Topology of the FSBB converter
摘要 四开关Buck-Boost变换器具有多种工作模式,适用于宽电压范围变换的场合,如何选择适合的工作模式以及实现平滑的模式切换是其需要解决的关键问题。该文提出一种四开关Buck-Boost变换器的多模式模型预测控制策略,根据电压变换需求确定了四种工作模式,在传统Buck和Boost模式的基础上加入两种扩展模式,消除Buck和Boost模式在输入电压和输出电压接近时存在的控制死区,利用模型预测控制方法的预测机制实现各工作模式的电流预测控制,同时,根据下一控制周期内不同工作模式的占空比预测结果,选择最适合的工作模式。仿真和实验结果表明,所提控制策略可以有效地选择四开关Buck-Boost变换器最适合的工作模式以及实现较平滑的模式切换,而且具有良好的动态响应性能。
关键词:四开关Buck-Boost 多工作模式 模型预测控制 模式切换
随着光伏、储能等直流型分布式电源的发展和应用,以及越来越多的直流负荷在用电终端接入,低压直流微电网以及低压直流配电系统得到了越来越多的关注和发展[1-2]。DC-DC变换器是常用的直流接口变换器,在低压直流微电网以及低压直流配电系统中发挥着重要作用[3]。四开关Buck-Boost(Four Switch Buck-Boost, FSBB)变换器是一种具有输入输出同极性、开关管电压应力小、既可以升压也可以降压等特点的双向DC-DC变换器[4-5]。相比于传统DC-DC变换器,FSBB变换器更适合有宽范围电压变换需求的场合,因此,在储能接口变换器、光伏发电、直流供电系统等场合得到了较多应用。
FSBB变换器由于其拓扑特点,可以实现Buck、Boost和Buck-Boost变换器的功能[6-7]。对于其控制方法,虽然可以采用Buck-Boost单模式控制方法实现升降压控制,但其效率较低。现有研究主要分为两种模式和三种模式控制方法。在两种模式控制中,当FSBB变换器的输出电压低于输入电压时,使其工作在Buck模式;当输出电压高于输入电压时,使其工作在Boost模式[8-9]。但当输入和输出电压比较接近时,两种模式控制会出现模式频繁切换的问题,容易导致控制不稳定和输出纹波较大,而且实际开关管存在最大/最小占空比限制,使得在输入和输出电压接近时存在控制死区,电压变换不能连续[10-11]。文献[9]针对FSBB变换器提出一种双沿调制的三种模式控制策略,在Buck模式和Boost模式之间加入Buck-Boost模式,避免了两种模式控制中输入和输出电压接近时模式频繁切换的问题。文献[12]提出一种基于平均电流控制的三种模式控制策略,通过输入电压检测单元来检测输入电压,并以此控制调制信号的偏置电压,进而实现三种模式的切换控制,但这种方法需要额外的模式检测单元,并且对模式切换检测的准确性要求较高。文献[13]提出一种基于双载波调制的三种模式控制策略,采用具有交叠区的双载波调制策略实现三种模式的切换控制,其三种模式均采用PI双环控制,如果每种模式采用独立的PI控制器,则需要分别调节三种模式的控制参数,但如果三种模式共用一组PI控制器,有的模式可能因此会降低部分动态性能,因此,控制参数设计和整定比较复杂。FSBB变换器的电压比由两个桥臂的开关管占空比决定,文献[14-15]采用固定FSBB变换器某一桥臂开关管占空比的方式,避免了两模式控制方法在输入和输出电压接近时容易出现控制死区的问题。文献[16]提出的FSBB变换器控制策略中,以最小化功率损耗为目标建立优化模型,需要同时优化开关管的开关频率和占空比,其控制策略比较复杂,不利于实际应用。
近年来,模型预测控制(Model Predictive Control, MPC)在电力电子变换器控制领域得到了较多应用,具有动态响应快、设计简单等优点[17-21]。文献[22]将有限控制集模型预测控制(Finite Control Set MPC, FCS-MPC)应用到级联式双向DC-DC变换器的控制中,提高了动态响应速度,但FCS-MPC存在开关频率不固定的问题,可能导致电流纹波较大。文献[23]将连续控制集模型预测控制(Continuous Control Set MPC,CCS-MPC)应用到DC-DC变换器的控制中,实现了定频控制,也具备较快的动态响应。如果将MPC应用到FSBB变换器的控制中:一方面,MPC的预测机制可以提升动态性能;另一方面,利用MPC预测FSBB变换器在不同工作模式下的系统状态,可以方便地选择最适合的工作模式,简化模式切换控制的工作。
针对FSBB变换器工作在宽电压范围时的控制问题,本文提出一种FSBB变换器的多模式模型预测控制策略,根据电压变换需求,在传统Buck和Boost两模式控制的基础上,在输入和输出电压接近时,增加两种由Buck和Boost拓展的工作模式,避免由于实际开关管占空比的限制而导致出现控制死区以及模式频繁切换的问题;利用MPC的预测机制实现四种工作模式下的电感电流预测控制,并根据不同工作模式的占空比预测结果,选择最适合的工作模式,实现不同模式之间的切换。最后,通过仿真和实验验证了所提控制策略的有效性。
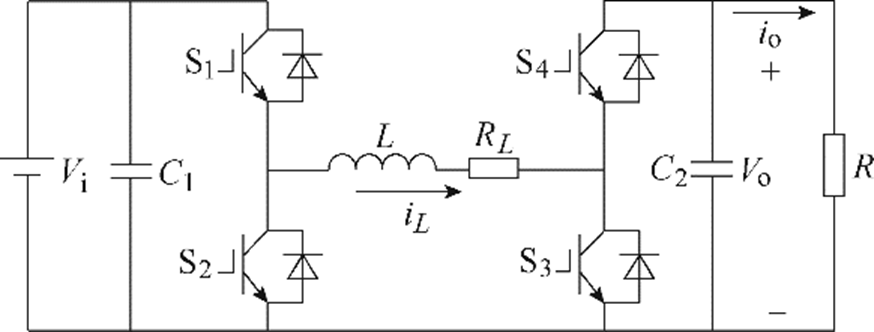
FSBB变换器拓扑如图1所示,图中,S1~S4为开关管,C1和C2分别为输入和输出侧电容,L和RL分别为电感和电感电阻,R为负载电阻,iL为电感电流,io为输出电流,Vi为输入电压,Vo为输出电压。FSBB变换器根据开关管的通断状态有四种工作模态,FSBB变换器的工作模态如图2所示。
图1 FSBB变换器拓扑
Fig.1 Topology of the FSBB converter

图2 FSBB变换器的工作模态
Fig.2 Operation modes of the FSBB converter
FSBB变换器的连续时域数学模型如下。
(1)当S1、S2交替导通,S3关断、S4导通时
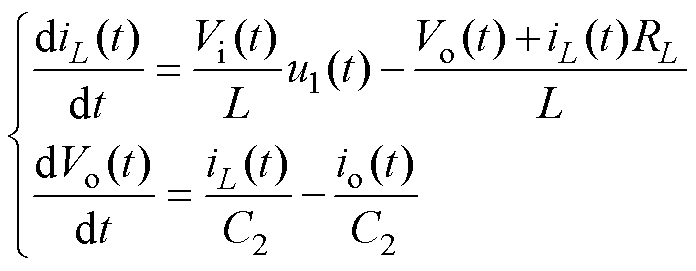 (1)
(1)
式中,u1(t)由S1、S2的开关状态决定,当S1导通、S2关断时,u1(t)=1;反之,u1(t)=0。
(2)当S3、S4交替导通,S1导通、S2关断时
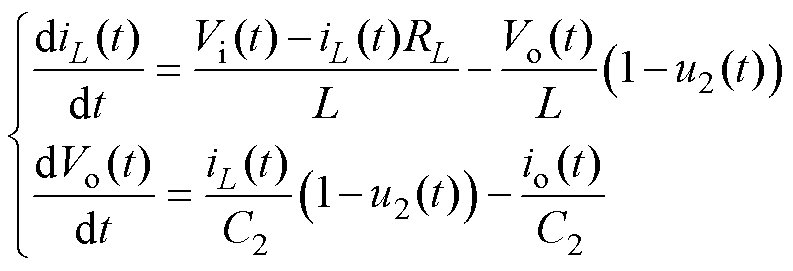 (2)
(2)
式中,u2(t)由S3、S4的开关状态决定,当S3导通、S4关断时,u2(t)=1;反之,u2(t)=0。
FSBB变换器的电路拓扑可以分为两部分:开关管S1和S2可以看作一个Buck单元;开关管S3和S4可以看作一个Boost单元,其中,S1和S3分别为Buck单元和Boost单元的主控管。在理想情况下,输出电压Vo和输入电压Vi的电压增益为
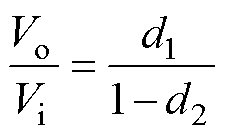 (3)
(3)
式中,d1和d2分别为S1和S3的占空比,在宽输入电压范围的工况下,通过调节d1和d2即可实现对输出电压的控制。当S1、S2交替导通,S3关断、S4导通时,FSBB变换器工作在Buck模式,此时d2=0;当S1导通,S2关断,S3和S4交替导通时,其工作在Boost模式,此时d1=1;当S1、S3同开同关,S2、S4同开同关时,其等效为Buck-Boost变换器,此时d1=d2。
FSBB变换器可以工作在Buck、Boost等多种工作模式,因此,在宽电压范围的工况中,为满足电压变换需求,需要选择适合的工作模式。同时,为了保证对输出电压连续稳定地控制,需要消除由于开关管的最大/最小占空比限制而导致出现的控制死区,以及避免FSBB变换器在不同模式之间频繁切换。
为此,本文提出一种FSBB变换器的多模式MPC策略,如图3所示。图中,Vo,ref和iL,ref分别为电压外环和电流内环的指令值。根据电压变换需求,划分了四种FSBB变换器的工作模式,除了Buck和Boost模式之外,针对输入和输出电压比较接近的工况,在Buck和Boost模式之间加入中间模式。中间模式的电压增益存在d1和d2两个控制自由度,使其控制相对更加复杂。为此,中间模式采用单一自由度控制,当需要升压控制时,固定d1为最大占空比,只调节d2,可看作是Boost模式的延伸,将其称为拓展Boost(Extended Boost, E-Boost)模式;当需要降压控制时,固定d2为最小占空比,只调节d1,可看作是Buck模式的延伸,将其称为拓展Buck(Extended Buck, E-Buck)模式,四种模式控制的示意图如图4所示,图中,d1,max和d1,min分别为d1的最大和最小值,d2,max和d2,min分别为d2的最大和最小值。控制策略的外环为电压PI控制,稳定输出电压,并输出内环的电感电流指令;内环为基于CCS-MPC的电感电流预测控制,通过建立FSBB变换器四种工作模式的预测模型,根据预测结果选择最适合的工作模式,实现变换器的多模式切换和对电感电流指令的快速跟踪。采用基于CCS-MPC的电感电流预测控制具有以下优点:①动态响应速度快;②可以实现固定频率控制;③利用MPC的预测机制可以方便地选择当前最适合的工作模式,无需额外的模式切换检测。
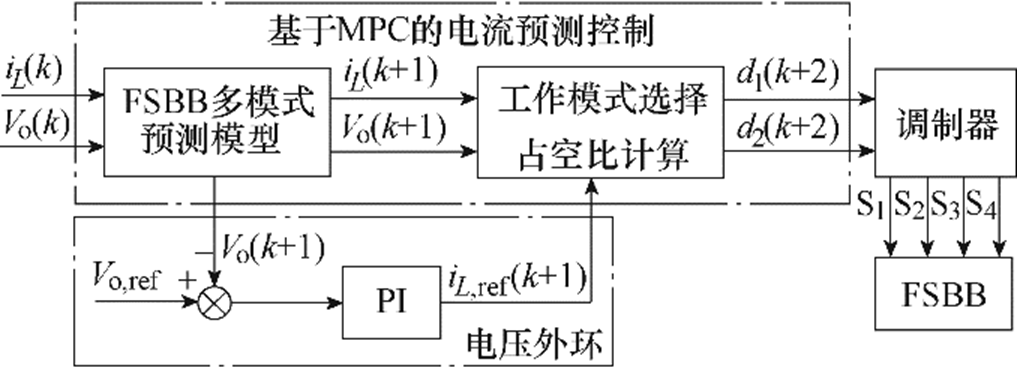
图3 FSBB变换器的多模式MPC策略
Fig.3 Multi-mode MPC strategy for FSBB converter
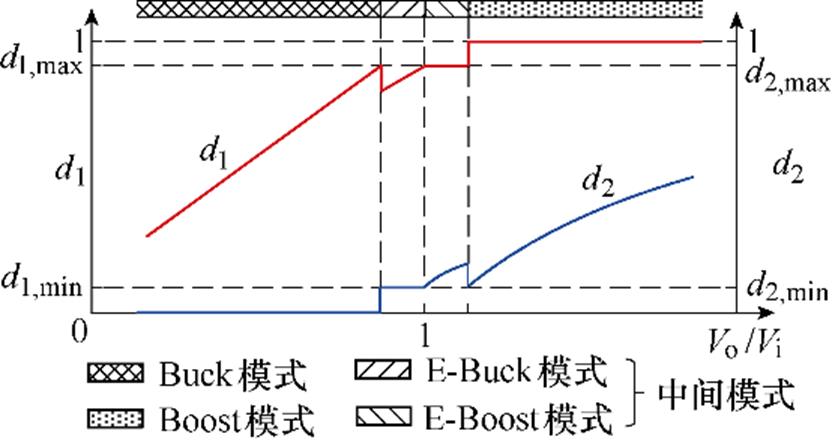
图4 四种模式控制示意图
Fig.4 Schematic diagram of the four-mode control
根据式(1)可以得到FSBB变换器Buck模式的离散域平均状态方程,并将其作为Buck模式的预测模型为
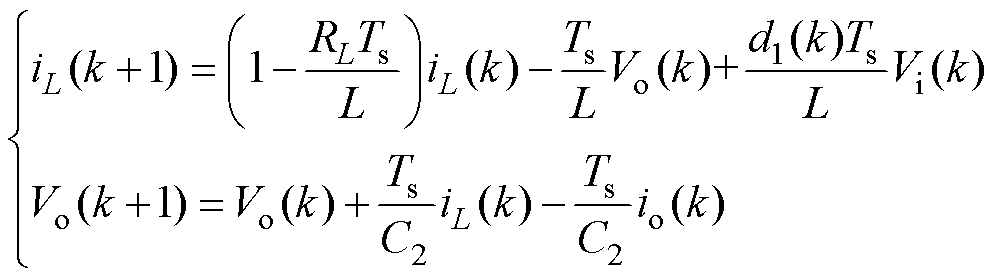 (4)
(4)
式中,Ts为采样周期。
类似地,根据式(2)可以得到FSBB变换器Boost模式的预测模型为
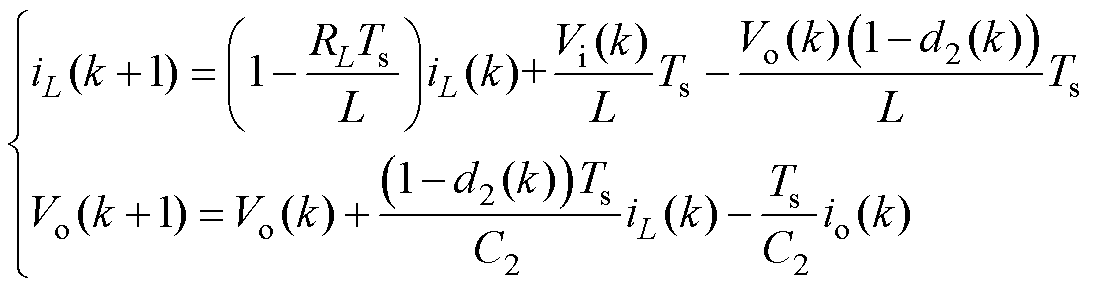 (5)
(5)
中间模式E-Boost和E-Buck作为Boost和Buck模式的延伸,其预测模型分别为
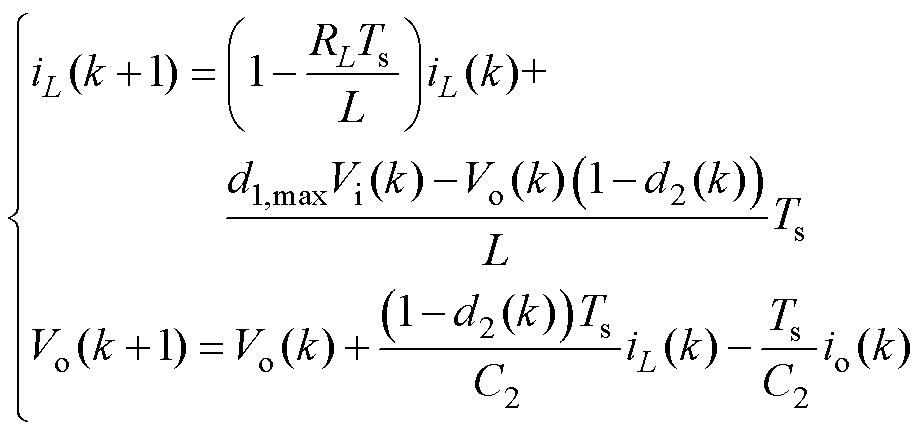 (6)
(6)
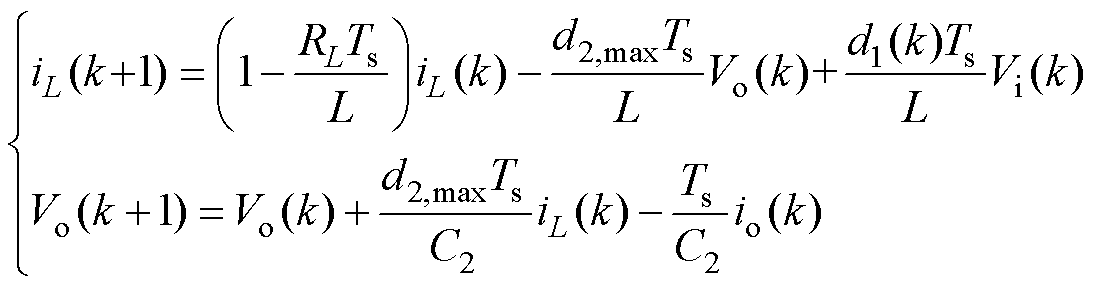 (7)
(7)
合理地选择工作模式是FSBB变换器控制系统的重要工作之一,本文利用MPC的预测机制,根据各模式预测模型的预测结果,自动选择最适合当前工况的工作模式,进而确定开关管的占空比。
从电感电流纹波角度来看,Buck和E-Buck模式的电感电流纹波以及Boost和E-Boost模式的电感电流纹波分别为
 (8)
(8)
 (9)
(9)
式中, 、
、 分别为Buck、E-Buck模式及Boost、E-Boost模式的电感电流纹波。
分别为Buck、E-Buck模式及Boost、E-Boost模式的电感电流纹波。
结合图4可知,当给定电感电流指令时,在占空比限值范围内,如果FSBB变换器选择Buck或E-Buck模式均能够跟踪相同的电感电流指令,由于Buck模式下d1更大,其纹波更小,而且开关动作次数也少于E-Buck模式,因此,优先选择Buck模式。同理,在Boost和E-Boost模式之间优先选择Boost模式。
在电感电流预测环节中,假设电感电流在一个采样周期就可以达到指令值iL,ref,分别将FSBB变换器四种工作模式的电感电流预测值iL(k+1)代入式(10),可以分别得到下一周期变换器如果工作在Buck、E-Buck、E-Boost和Boost模式的占空比d1(k+1)和d2(k+1),表达式见表1,表中,M=1~4,分别表示Buck、E-Buck、E-Boost和Boost模式。为方便后文说明工作模式的选择过程,将上述四种模式的占空比分别记作d1,b(k+1)和d2,b(k+1)、d1,eb(k+1)和d2,eb(k+1)、d1,ebo(k+1)和d2,ebo(k+1)、d1,bo(k+1)和d2,bo(k+1)。
 (10)
(10)
由图4可以发现,相邻的两种工作模式在模式切换边界处电压增益近似相等,当FSBB变换器的工作点在模式切换边界附近时,容易出现模式频繁切换的情况,导致输出不稳定。为了尽量避免这种不期望的模式切换发生,在模式切换边界加入占空比滞环,加入占空比滞环的四种模式控制示意图如图5所示,图中,h1和h2为滞环宽度。
表1 FSBB变换器四种工作模式的占空比
Tab.1 The duty cycles of the four operating modes of FSBB converter

模式M占空比 Buck (M=1) E-Buck (M=2) E-Boost (M=3) Boost (M=4)
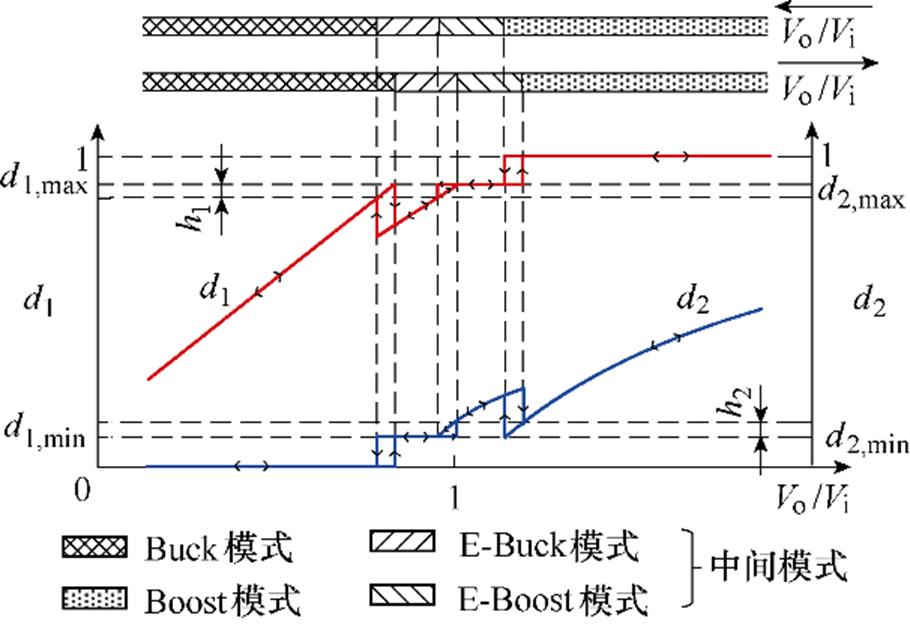
图5 加入占空比滞环的四种模式控制示意图
Fig.5 Schematic diagram of the four-mode control with duty cycle hysteresis
根据FSBB变换器的预测模型得到下一周期四种模式的占空比后,工作模式选择步骤如下:
(1)当Buck模式的占空比d1,b(k+1)≤d1,max时,首先判断上一周期的工作模式是否为E-Buck模式,如果不是,则直接选择下一周期的工作模式为Buck模式;如果是,说明下一周期有可能发生E-Buck和Buck模式之间的切换,为避免变换器当前的工作点在Buck和E-Buck的模式边界附近容易发生模式频繁切换,此时,加入占空比滞环,如果d1,b(k+1)≤d1,max-h1,则选择下一周期的工作模式为Buck模式;否则,仍为E-Buck模式。
(2)当d1,b(k+1)>d1,max时,如果E-Buck模式的占空比d1,eb(k+1)≤d1,max,判断上一周期的工作模式是否为E-Boost模式,如果不是,则直接选择下一周期的工作模式为E-Buck模式;如果是,加入占空比滞环,如果d1,eb(k+1)≤d1,max-h1,则选择下一周期的工作模式为E-Buck模式;否则,仍为E-Boost模式。而当d1,eb(k+1)>d1,max时,说明选择Buck或E-Buck模式已经不能达到电感电流指令值,继续步骤(3)。
(3)当Boost模式的占空比d2,bo(k+1)≥d2,min时,判断上一周期的工作模式是否为E-Boost模式,如果不是,则直接选择下一周期的工作模式为Boost模式;如果是,加入占空比滞环,如果d2,bo(k+1)≥d2,min+h2,则选择下一周期的工作模式为Boost模式;否则,仍为E-Boost模式。而当0<d2,bo(k+1)<d2,min时,如果d2,ebo(k+1)≥d2,min,则选择下一周期的工作模式为E-Boost模式。
通过上述控制过程,MPC根据下一周期系统状态的预测结果可以提前选择最合适的工作模式。确定了下一周期的工作模式后,由M记录所选择的工作模式的编号,然后查询表1计算下一周期的占空比指令。
在上述四种模式的控制方法下,FSBB变换器的电压增益如图6所示,图中,变量m(0<m<2 与d1和d2的关系如下:在Buck模式中,m=d1;在E-Buck模式中,m=d1+d2,min;在E-Boost模式中,m=d2+d1,max;在Boost模式中,m=d2+1。由图6可以看出,当输入和输出电压接近时,电压增益近似连续,模式切换相对更加平滑,不会发生较大跳变,而且加入的占空比滞环可以避免在模式切换边界附近发生频繁的模式切换。
与d1和d2的关系如下:在Buck模式中,m=d1;在E-Buck模式中,m=d1+d2,min;在E-Boost模式中,m=d2+d1,max;在Boost模式中,m=d2+1。由图6可以看出,当输入和输出电压接近时,电压增益近似连续,模式切换相对更加平滑,不会发生较大跳变,而且加入的占空比滞环可以避免在模式切换边界附近发生频繁的模式切换。
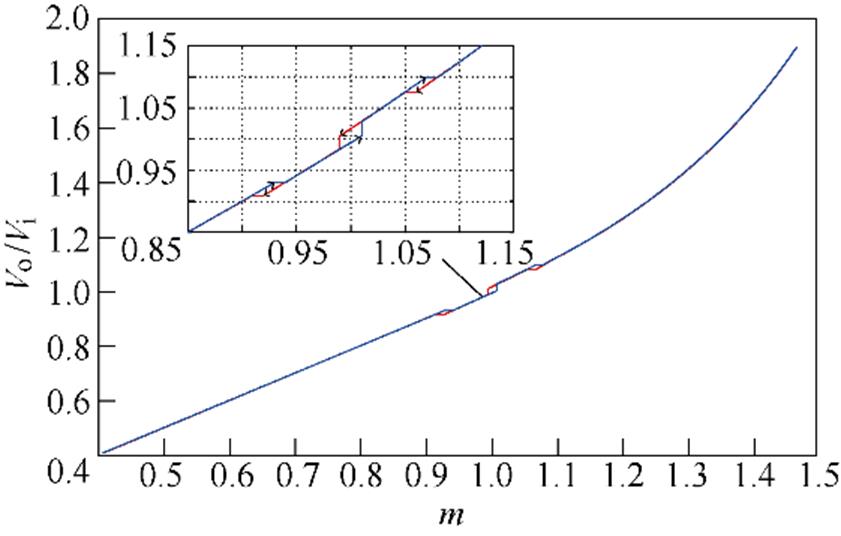
图6 FSBB变换器的电压增益
Fig.6 Voltage gain of the FSBB converter
在数字控制中,采样、控制指令计算、开关动作更新等环节不可能同时完成,从控制指令计算到开关动作更新存在约为一拍的控制延时[24]。控制延时可能会造成控制偏差、产生脉动等问题,因此,在基于MPC的电流预测控制中需要对控制延时进行补偿。本文利用MPC的预测机制,采用超前预测一步的方式进行控制延时补偿,具体的做法是:当k时刻得到变换器的Vi(k)、Vo(k)、iL(k)等采样信息后,根据上一周期工作模式的预测模型预测k+1时刻的系统状态Vo(k+1)、iL(k+1),然后利用这一步的预测状态进行电压外环的计算,得到电感电流指令,同时用它们代替表1中占空比表达式中的Vo(k)、iL(k),进而计算得到占空比指令d1(k+2)和d2(k+2),将超前一步的占空比指令d1(k+2)和d2(k+2)更新到k+1时刻的控制周期开关动作中,这样便降低了控制延时对控制效果的影响。
综上所述,本文所提控制策略的流程如图7所示。
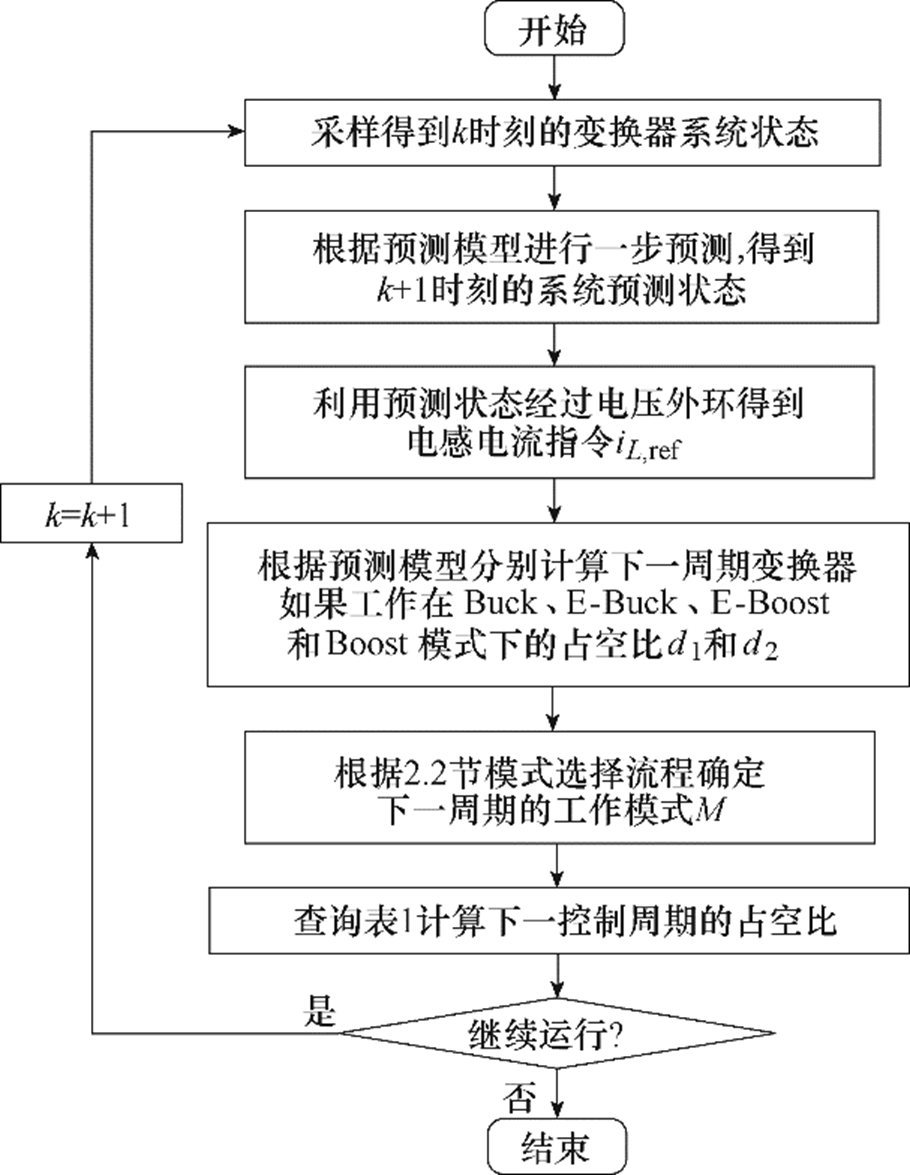
图7 控制策略流程
Fig.7 Flowchart of the proposed control strategy
为了验证所提控制策略的有效性,本文利用Matlab/Simulink搭建了FSBB变换器的仿真模型进行仿真证明,并搭建了实验平台进行实验验证,平台示意图如图8所示,仿真和实验的相关参数见表2。为了验证和说明所提控制策略的控制效果和特点,设置对比控制策略为传统PI双闭环控制策略。
给定内环电感电流指令,当电感电流指令发生阶跃变化时,采用所提控制策略和PI控制策略的仿真结果如图9所示。输入电压为130V,负载为30W,采用所提控制策略时,电感电流指令从2A阶跃至4A,电感电流可以在3个开关周期跟踪到给定值,而且基本没有超调。当采用PI控制策略时,电感电流跟踪到给定值的动态调节时间约为1.1ms,存在超调。
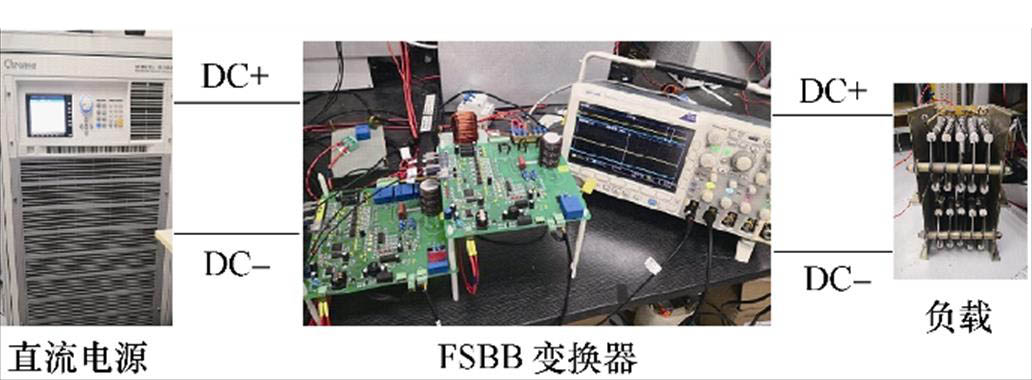
图8 实验平台示意图
Fig.8 Schematic diagram of the experiment platform
表2 主要参数
Tab.2 Main parameters

参 数数 值 电感L/mH3.3 电感电阻RL/W0.4 输入/输出侧电容C1, C2/mF470 开关周期Ts/ms100 输出电压指令Vo,ref/V110 最大占空比d1,max, d2,max0.93 最小占空比d1,min, d2,min0.07 占空比滞环宽度h1, h20.02
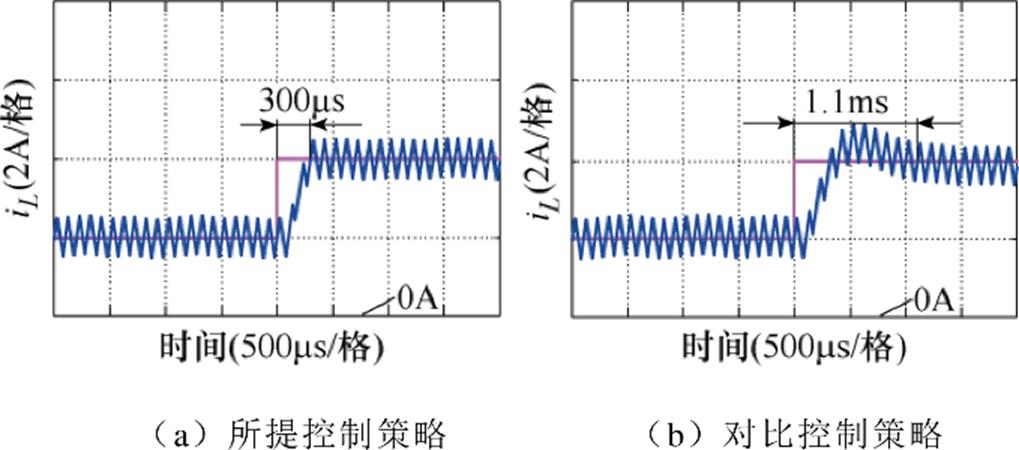
图9 电感电流指令跟踪仿真结果
Fig.9 Simulation results of tracking the inductor current command
采用所提控制策略和PI控制策略的电感电流指令跟踪的实验结果如图10所示,可以看出,实验结果与仿真结果基本一致。PI控制存在一定的滞后性,所提控制策略的电感电流预测控制由于其具有预测能力,对系统的状态变化有一定的超前感知能力,可以更快速地跟踪电感电流指令变化,而且基本没有超调。
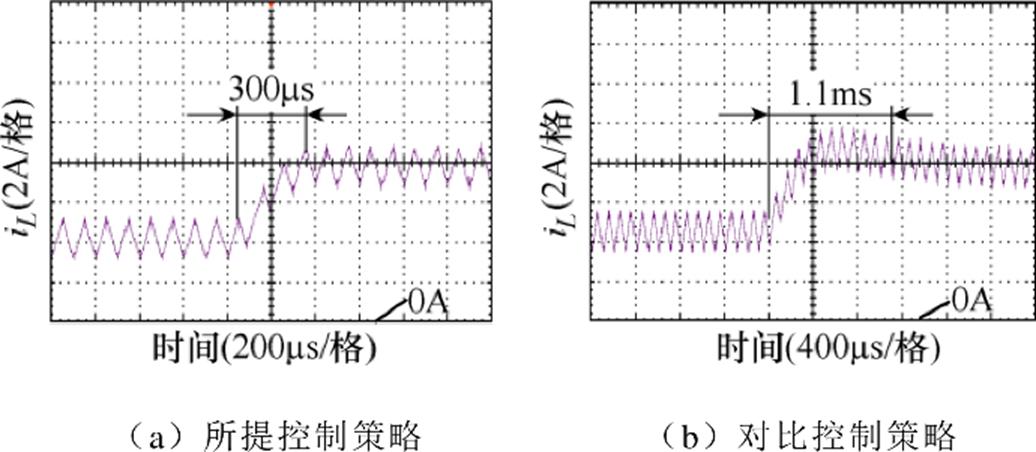
图10 电感电流指令跟踪实验结果
Fig.10 Experimental results of tracking the inductor current command
当负载发生阶跃突变时,采用所提控制策略和PI双闭环控制策略的仿真结果如图11所示,输出电压指令为110V,负载在运行中由60W 突变为30W。采用所提控制策略时,图11a中,输入电压为130V,FSBB变换器工作在Buck模式,负载突变后,输出电压和电感电流大约在4ms后到达新稳态,在动态调节过程中,输出电压跌落约3V;图11b中,输入电压为90V,FSBB变换器工作在Boost模式,负载突变后,输出电压和电感电流大约在4.3ms后到达新稳态,在动态调节过程中,输出电压跌落约3.4V;图11c中,输入电压为110V,FSBB变换器工作在中间模式,负载突变后,输出电压和电感电流大约在4.2ms后到达新稳态,在动态调节过程中,输出电压跌落约3.1V。采用PI双闭环控制策略时,在上述相同的三种工况下,输出电压和电感电流均需要约6ms到达新稳态,其间输出电压分别跌落约为3.4V、4.4V和3.8V。
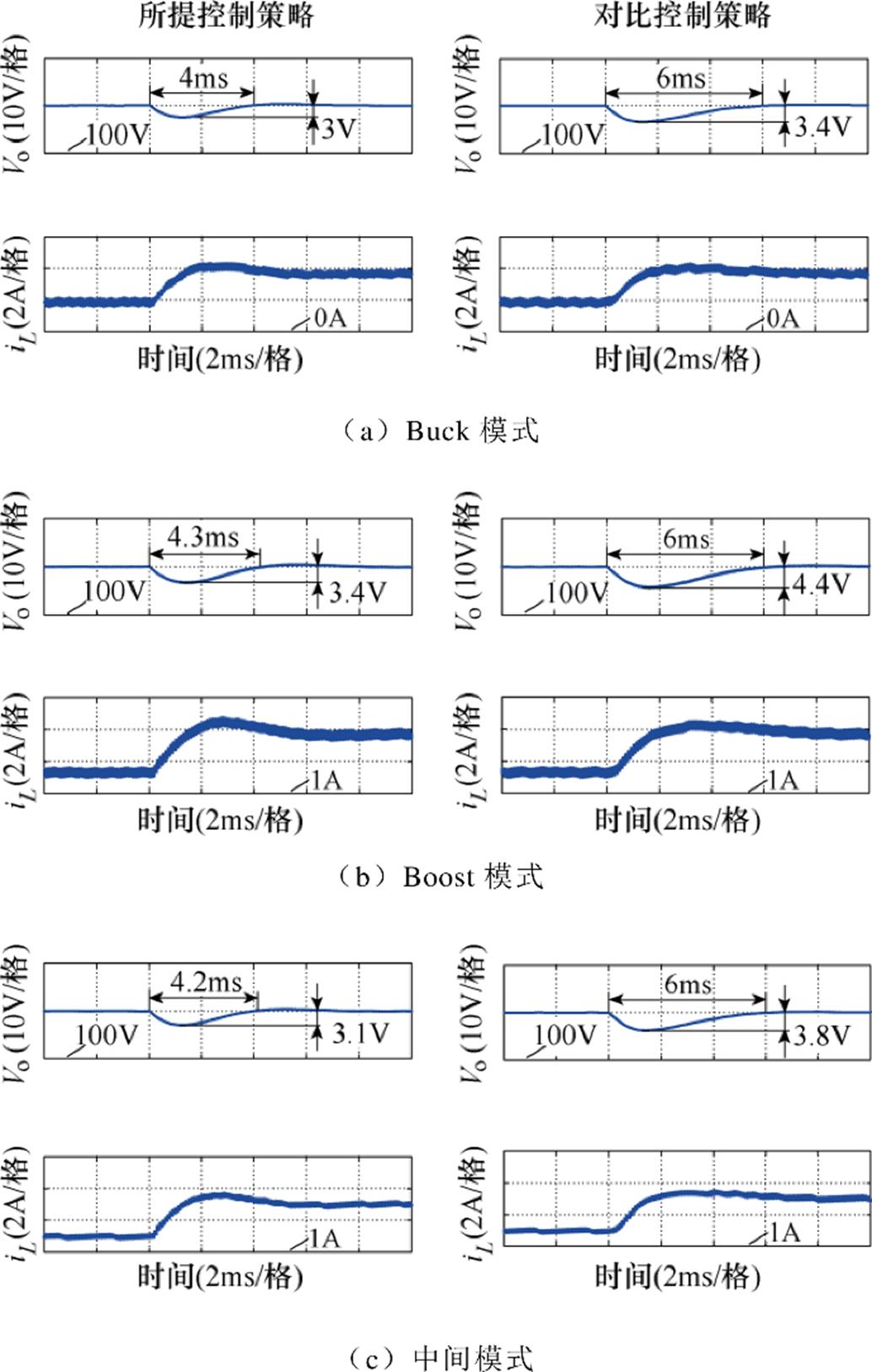
图11 负载突变仿真结果
Fig.11 Simulation results of load sudden change
采用所提控制策略和PI双闭环控制策略的负载突变的实验结果如图12所示,可以看出,实验结果与仿真结果基本一致。综合仿真和实验结果可以说明,当FSBB变换器在不同工作模式中发生负载突变或扰动时,采用所提控制策略时,负载变化对变换器的系统状态影响程度更小。

图12 负载突变实验结果
Fig.12 Experimental results of load sudden change
采用所提控制策略和PI双闭环控制策略的工作模式切换的仿真结果1如图13所示,当给定期望输出电压时,如果输入电压在宽范围变化,FSBB变换器可能在Buck、Boost或中间模式之间进行模式切换。输出电压指令为110V,负载为30W,在所提控制策略下,当输入电压从130V阶跃到110V时,FSBB变换器由Buck模式切换到中间模式,由图13a可以看出,输出电压和电感电流的动态调节时间约为3.4ms,其间输出电压跌落约1V;当输入电压从110V阶跃到90V时,FSBB变换器由中间模式切换到Boost模式,由图13b可以看出,输出电压和电感电流的动态调节时间约为3.6ms,其间输出电压跌落约1.5V。
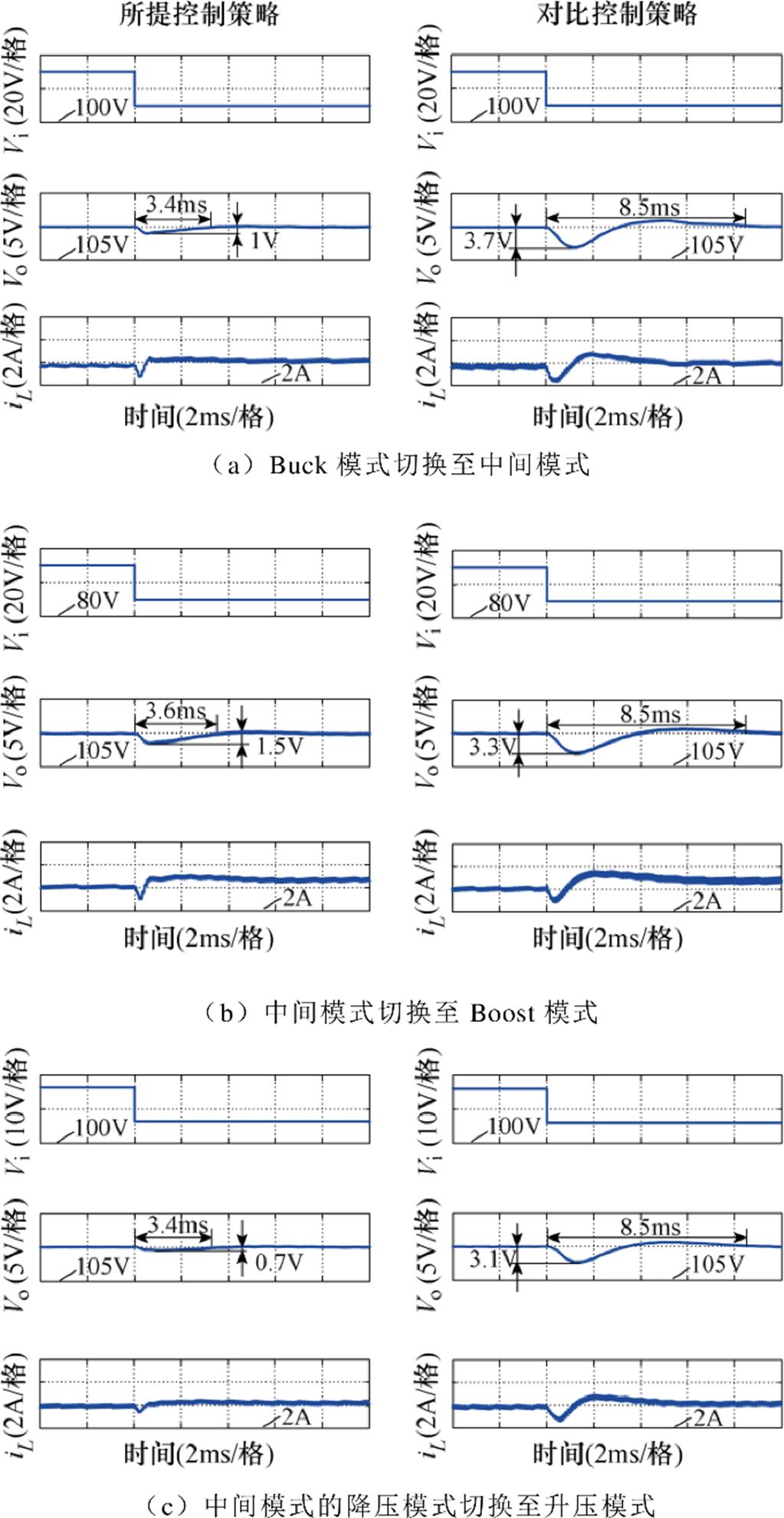
图13 工作模式切换仿真结果1
Fig.13 Simulation results 1 of operating modes switching
当输入电压从117V阶跃到107V时,根据所提控制策略,FSBB变换器将从中间模式的E-Buck和E-Boost两种工作模式中进行选择,由图13c可以看出,输出电压和电感电流的动态调节时间约为3.4ms,其间输出电压跌落约0.7V。仿真中还可以发现,当输入电压为117V时,Buck单元S1的占空比d1约为0.91,Boost单元S3的占空比d2为最小占空比,此时变换器选择的工作模式为E-Buck模式;当输入电压为107V时,Buck单元S1的占空比d1为最大占空比,Boost单元S3的占空比d2约为0.14,此时变换器选择的工作模式为E-Boost模式。
当采用PI双闭环控制策略时,在上述三种工况中,输出电压和电感电流的调节时间均约为8.5ms,其间输出电压分别跌落约3.7V、3.3V和3.1V。
采用所提控制策略和PI双闭环控制策略的工作模式切换的实验结果1如图14所示,可以看出,实验结果与仿真结果基本一致。综合仿真和实验结果可以说明,当FSBB变换器进行工作模式切换时,采用所提控制策略可以更快速地调节到新稳态,而且在动态调节过程中,输出电压和电感电流的变化幅度均更小,模式切换过程相对更加平滑。
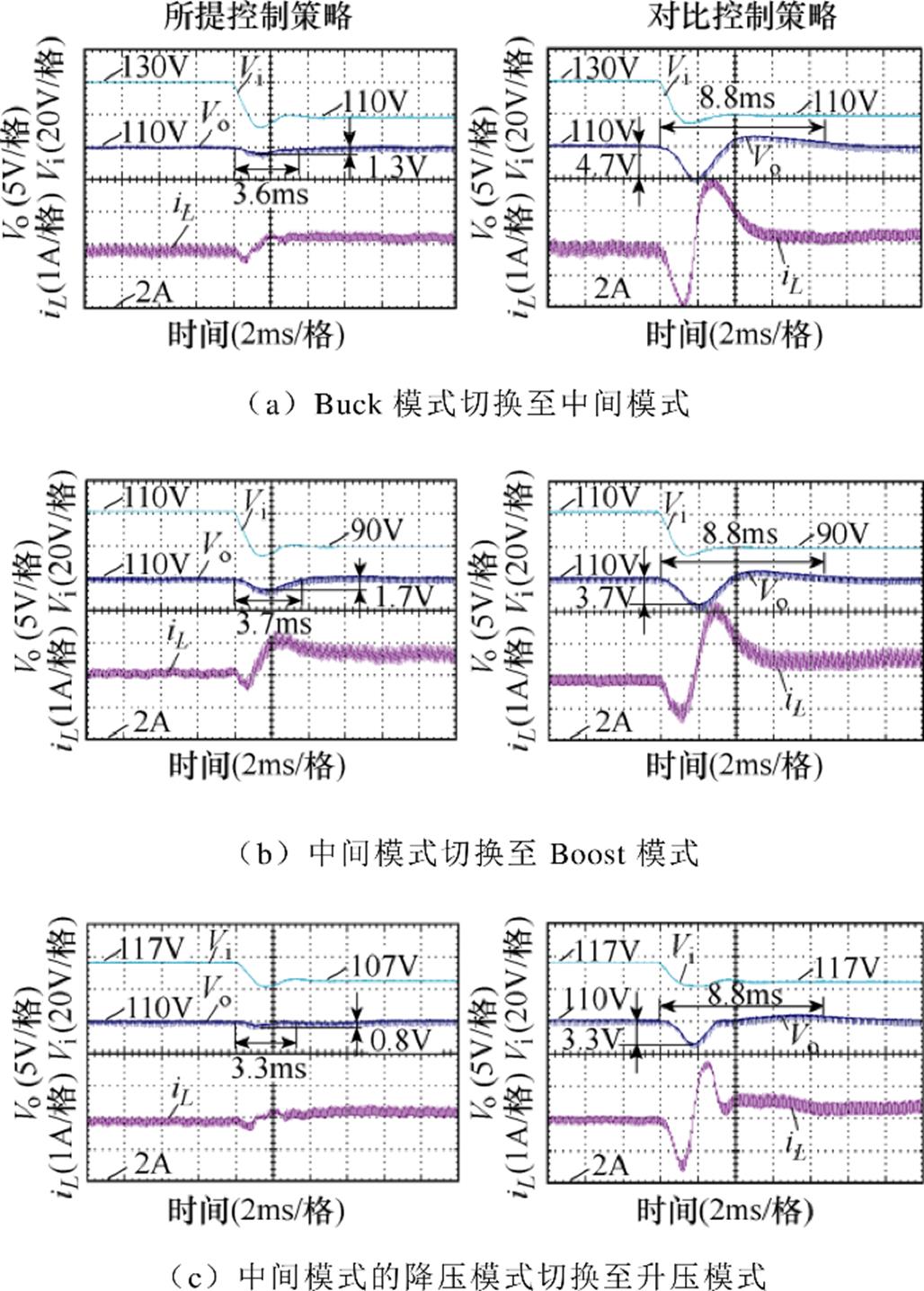
图14 工作模式切换实验结果1
Fig.14 Experimental results 1 of operating modes switching
为了进一步说明所提控制策略的控制效果,与传统三种模式控制策略进行了对比。三种模式控制参考文献[9]中的控制方式,在中间模式中固定Buck单元占空比d1为dm,只调节Boost单元占空比d2。由式(3)可知,在中间模式中,当d1=dm时,输入电压越高、d2越小,为了保证d2在动稳态调节过程中均不低于最小占空比限值,一般选择dm=0.85。
当FSBB变换器采用三种模式控制时,控制策略同样采用两种,分别为结合所提MPC策略的三种模式MPC策略和传统三种模式PI双闭环控制策略。输出电压指令为110V,负载为30W,当输入电压变化时,采用三种模式MPC策略和三种模式PI双闭环控制策略的模式切换仿真和实验结果2如图15和图16所示。采用四种模式控制策略的模式切换仿真和实验结果如图13和图14所示,不同控制策略的实验结果对比见表3,可以看出,发生工作模式切换时,四种模式和三种模式控制策略的动态性能相差不大,但由于MPC具有更快的动态响应,而且结合MPC的预测机制可以超前选择最适合当前系统状态的工作模式,因此,结合MPC的控制策略在模式切换控制上的动态性能要优于PI双闭环控制策略。
四种模式和三种模式控制策略的主要区别在于当FSBB变换器的输入和输出电压接近时,四种模式控制策略划分了E-Boost和E-Buck两种中间模式,而三种模式控制策略只有一种中间模式,其与E-Boost模式类似。在中间模式中,相比于三种模式控制策略,采用四种模式控制策略时,占空比d1和d2更接近最大和最小占空比限值,由式(8)和式(9)可知,其电感电流纹波相对更小;此时,平均电感电流和平均输出电流的关系如式(11)所示,在相同负载下,采用四种模式控制策略时,中间模式的平均电感电流相对更小,因此,其损耗相对更小。图17和图18分别为采用四种模式和三种模式控制策略的中间模式稳态的仿真和实验结果,可以看出,当输入电压为117V,采用四种模式控制策略时,FSBB变换器工作在E-Buck模式,电感电流纹波约为0.3A,平均电感电流约为3.94A;而采用三种模式控制策略时,电感电流纹波约为0.52A,平均电感电流约为4.24A。当输入电压为110V时,采用四种模式控制策略的电感电流纹波和平均电感电流同样相对更小。因此,采用四种模式控制策略的中间模式的稳态特性相对更好。
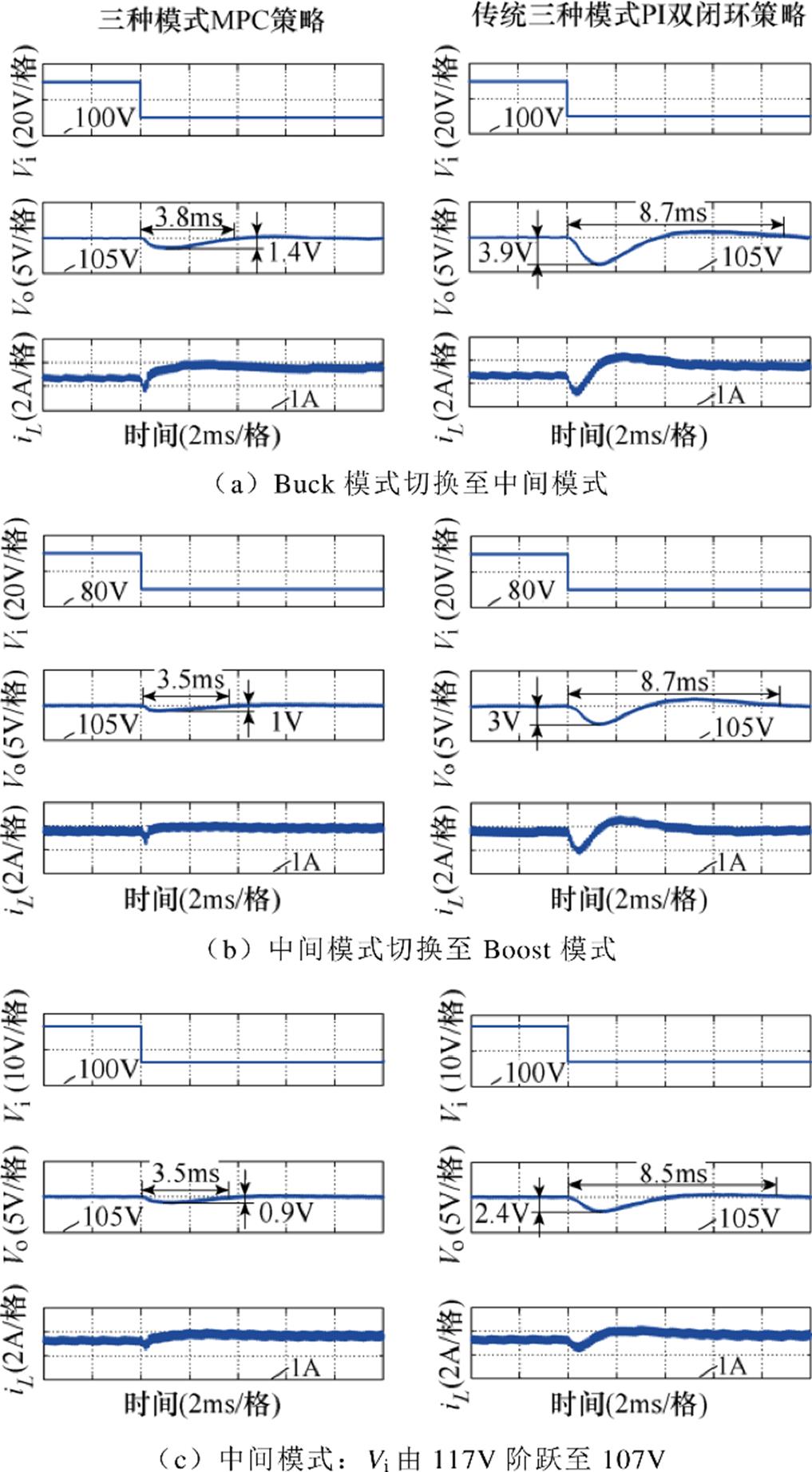
图15 工作模式切换仿真结果2
Fig.15 Simulation results 2 of operating modes switching
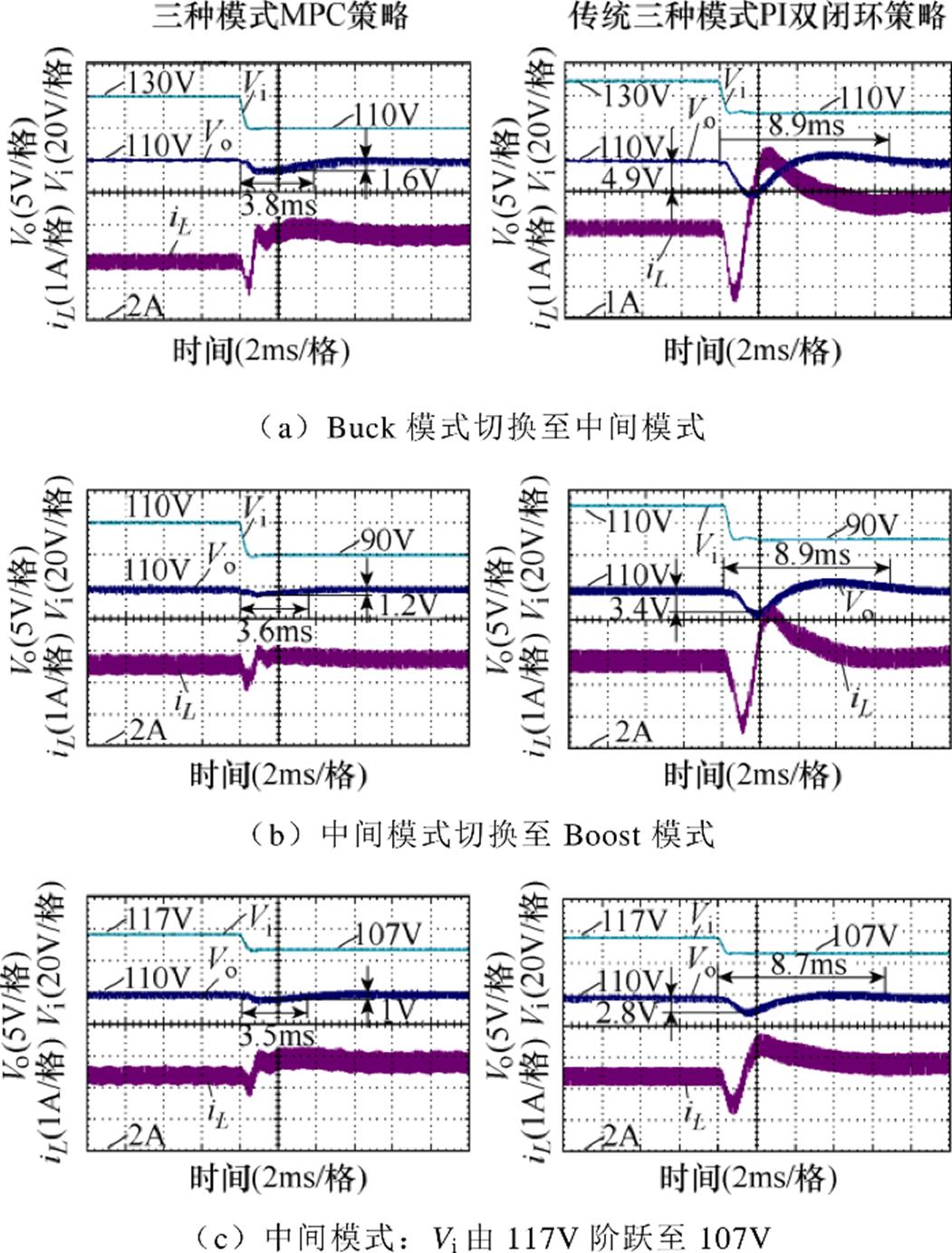
图16 工作模式切换实验结果2
Fig.16 Experimental results 2 of operating modes switching
表3 不同控制策略在模式切换上控制效果的实验对比结果
Tab.3 Experimental comparison results of the control effects of different control strategies on mode switching

运行工况动态过程所提控制策略四种模式 PI双闭环策略三种模式 MPC策略三种模式 PI双闭环策略 Vi从130V阶跃至110V输出电压跌落/V1.34.71.64.9 调节时间/ms3.68.83.88.9 Vi从110V阶跃至90V输出电压跌落/V1.73.71.23.4 调节时间/ms3.78.83.68.9 Vi从117V阶跃至107V输出电压跌落/V0.83.31.02.8 调节时间/ms3.38.83.58.7
 (11)
(11)
式中,IL为平均电感电流;Io为平均输出电流。
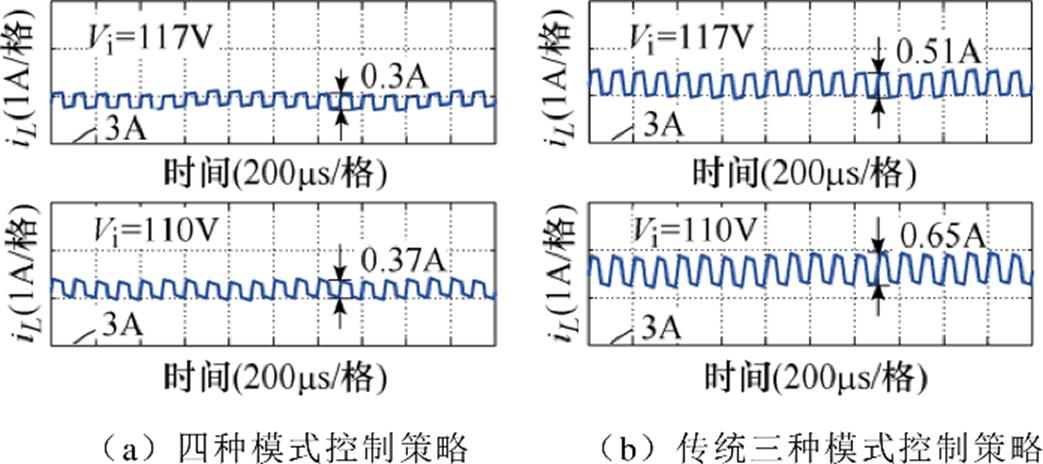
图17 中间模式稳态仿真结果
Fig.17 Steady-state simulation results of the intermediate mode
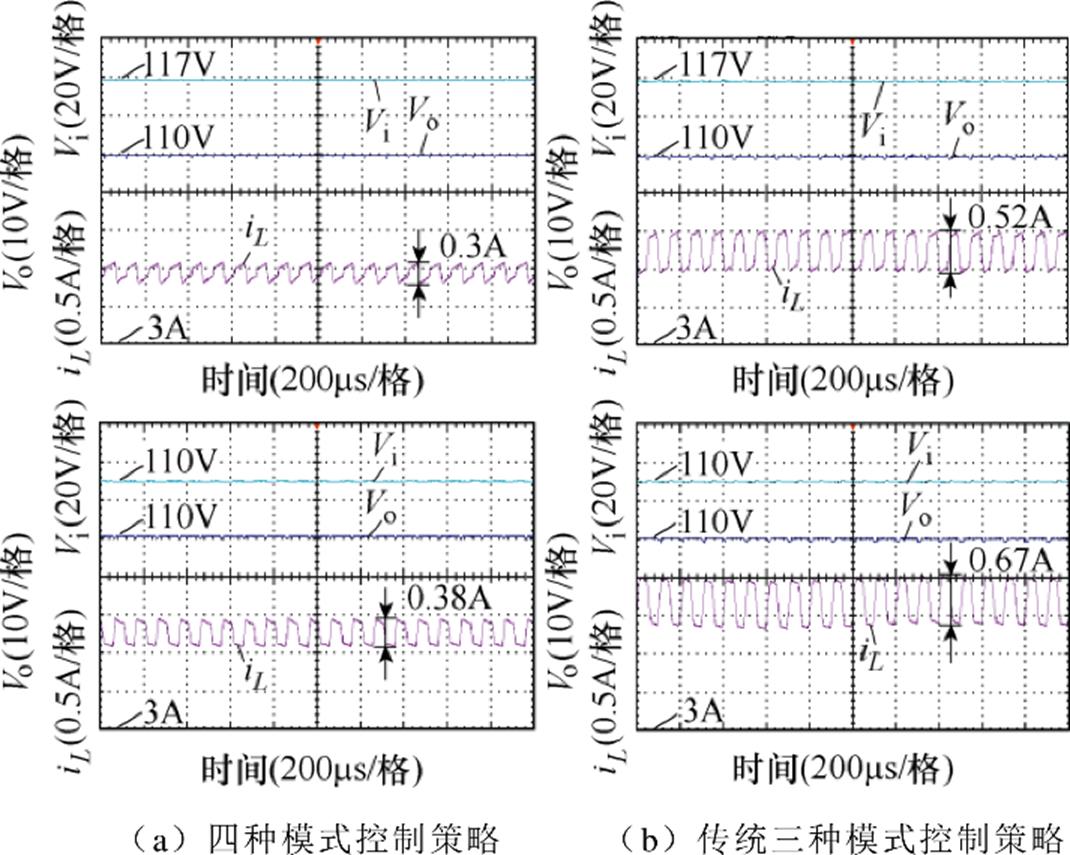
图18 中间模式稳态实验结果
Fig.18 Steady-state experimental results of the intermediate mode
本文针对FSBB变换器的控制死区和多模式切换控制的问题,提出了一种FSBB变换器的多模式模型预测控制策略。主要结论如下:为了避免开关管的最大/最小占空比限制而存在电压控制死区,根据电压变换需求,确定了Buck、E-Buck、E-Boost和Boost四种工作模式,在输入和输出电压接近时,采用E-Buck或E-Boost模式,消除了控制死区对电压变换的影响,保证了FSBB变换器可实现宽范围的电压连续变换,同时,相比于传统控制方式,平均电感电流和纹波相对更小;利用MPC的预测机制实现了不同工作模式的电感电流预测控制,根据变换器的电感电流指令和MPC方法预测下一控制周期工作在不同工作模式的占空比,并根据预测结果选择最适合的工作模式;最后,仿真和实验结果表明,所提控制策略提升了变换器的动态响应性能,能够选择变换器最适合的工作模式,并实现了较平滑的模式切换。
参考文献
[1] 杨美辉, 周念成, 王强钢, 等. 基于分布式协同的双极直流微电网不平衡电压控制策略[J]. 电工技术学报, 2021, 36(3): 634-645.
Yang Meihui, Zhou Niancheng, Wang Qianggang, et al. Unbalanced voltage control strategy of bipolar DC microgrid based on distributed cooperation[J]. Transactions of China Electrotechnical Society, 2021, 36(3): 634-645.
[2] 刘彦呈, 庄绪州, 张勤进, 等. 基于虚拟频率的直流微电网下垂控制策略[J]. 电工技术学报, 2021, 36(8): 1693-1702.
Liu Yancheng, Zhuang Xuzhou, Zhang Qinjin, et al. A virtual current-frequency droop control in DC microgrid[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1693-1702.
[3] 王朝强, 曹太强, 郭筱瑛, 等. 三相交错并联双向DC-DC变换器动态休眠控制策略[J]. 电工技术学报, 2020, 35(15): 3214-3223.
Wang Chaoqiang, Cao Taiqiang, Guo Xiaoying, et al. Dynamic dormancy control strategy of three-phase staggered parallel bidirectional DC-DC converter[J]. Transactions of China Electrotechnical Society, 2020, 35(15): 3214-3223.
[4] 李优新, 吴鹏, 刘剑彬, 等. 一种改进的四开关Buck-Boost变换器控制策略[J]. 电气传动, 2020, 50(8): 33-38.
Li Youxin, Wu Peng, Liu Jianbin, et al. An improved control strategy of four switch Buck-Boost converter[J]. Electric Drive, 2020, 50(8): 33-38.
[5] Zhou Zongjie, Li Haiyan, Wu Xinke. A constant frequency ZVS control system for the four-switch Buck-Boost DC-DC converter with reduced inductor current[J]. IEEE Transactions on Power Electronics, 2019, 34(7): 5996-6003.
[6] Wu K C, Wu H H, Wei C L. Analysis and design of mixed-mode operation for non-inverting Buck-Boost DC-DC converters[J]. IEEE Transactions on Circuits & Systems II Express Briefs, 2015, 62(12): 1194- 1198.
[7] Jia Leilei, Sun Xiaofeng, Zheng Zhiwen, et al. Multimode smooth switching strategy for eliminating the operational dead zone in noninverting Buck-Boost converter[J]. IEEE Transactions on Power Electronics, 2020, 35(3): 3106-3113.
[8] 颜湘武, 王杨, 葛小凤, 等. 双管Buck-Boost变换器的带输入电压前馈双闭环控制策略[J]. 电力自动化设备, 2016, 36(10): 65-70, 77.
Yan Xiangwu, Wang Yang, Ge Xiaofeng, et al. Dual- loop control with input voltage feedforward for dual-switch Buck-Boost converter[J]. Electric Power Automation Equipment, 2016, 36(10): 65-70, 77.
[9] 任小永, 阮新波, 李明秋, 等. 双沿调制的四开关Buck-Boost变换器[J]. 中国电机工程学报, 2009, 29(12): 16-23.
Ren Xiaoyong, Ruan Xinbo, Li Mingqiu, et al. Dual edge modulated four-switch Buck-Boost converter[J]. Proceedings of the CSEE, 2009, 29(12): 16-23.
[10] Zhang Guidong, Yuan Jun, Yu S S, et al. Advanced four-mode-modulation-based four-switch non-inverting Buck-Boost converter with extra operation zone[J]. IET Power Electronics, 2020, 13(10): 2049-2059.
[11] Tsai Y Y, Tsai Y S, Tsai C W, et al. Digital noninverting- Buck-Boost converter with enhanced duty-cycle- overlap control[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2017, 64(1): 41-45.
[12] 李山, 宋立风, 章治国. 四开关Buck-Boost变换器的三模式控制方法研究[J]. 电源学报, 2019, 17(3): 111-119.
Li Shan, Song Lifeng, Zhang Zhiguo. Study on three- mode control method for four-switch Buck-Boost converter[J]. Journal of Power Supply, 2019, 17(3): 111-119.
[13] 程盛. 直流微网柔性互联开关控制策略研究[D]. 北京: 北京交通大学, 2017.
[14] Wang Yuan, Lan Jianyu, Huang Xin, et al. An improved single-mode control strategy based on four-switch Buck-Boost converter[C]//2020 IEEE Applied Power Electronics Conference and Expo- sition, New Orleans, LA, USA, 2020: 1-6.
[15] Tsai C H, Tsai Y S, Liu H C. A stable mode-transition technique for a digitally controlled non-inverting Buck-Boost DC-DC converter[J]. IEEE Transactions on Industrial Electronics, 2015, 62(1): 475-483.
[16] Yu Zhe, Kapels H, Hoffmann K F. A novel control concept for high-efficiency power conversion with the bidirectional non-inverting Buck-Boost converter[C]// 2016 18th European Conference on Power Electronics and Applications, Karlsruhe, Germany, 2016: 1-10.
[17] 杨惠, 晁凯悦, 孙向东, 等. 基于矢量作用时间的双向DC-DC变换器预测电流控制方法[J]. 电工技术学报, 2020, 35(增刊1): 70-80.
Yang Hui, Chao Kaiyue, Sun Xiangdong, et al. Predictive current control method for bidirectional DC-DC converter based on optimal operating time of vector[J]. Transactions of China Electrotechnical Society, 2020, 35(S1): 70-80.
[18] Li Yu, Zhang Zhenbin, Li Kejun, et al. Predictive current control for voltage source inverters con- sidering dead-time effect[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(1): 35-42.
[19] 丁雄, 林国庆. 三相并网逆变器的改进模型预测控制研究[J]. 电气技术, 2020, 21(3): 16-21.
Ding Xiong, Lin Guoqing. Research on three-phase grid-connected inverter based on discrete space vector model predictive control[J]. Electrical Engineering, 2020, 21(3): 16-21.
[20] 耿强, 王亮, 周湛清, 等. 五桥臂逆变器双永磁电机三矢量预测控制[J]. 电工技术学报, 2021, 36(1): 87-95.
Geng Qiang, Wang Liang, Zhou Zhanqing, et al. Three-vector-based predictive control for dual permanent magnet synchronous motors fed by the five-leg inverter[J]. Transactions of China Electro- technical Society, 2021, 36(1): 87-95.
[21] 王祯, 尹项根, 陈玉, 等. 基于连续控制集模型预测控制的MMC桥臂电流控制策略[J]. 电力系统自动化, 2020, 44(10): 85-91.
Wang Zhen, Yin Xianggen, Chen Yu, et al. Arm current control strategy of modular multilevel con- verter based on continuous control set model predictive control[J]. Automation of Electric Power System, 2020, 44(10): 85-91.
[22] 梅杨, 陈丽莎, 黄伟超, 等. 级联式双向DC-DC变换器的优化控制方法[J]. 电工技术学报, 2017, 32(19): 153-159.
Mei Yang, Chen Lisha, Huang Weichao, et al. Optimized control method of cascaded bi-directional DC-DC converters[J]. Transactions of China Electro- technical Society, 2017, 32(19): 153-159.
[23] 贾志东, 姜久春, 程龙, 等. 适用于Boost变换器的自适应模型预测控制算法[J]. 中国电机工程学报, 2018, 38(19): 5838-5845, 5941.
Jia Zhidong, Jiang Jiuchun, Cheng Long, et al. An adaptive model predictive control for DC-DC Boost converters[J]. Proceedings of the CSEE, 2018, 38(19): 5838-5845, 5941.
[24] 陈燕东, 罗安, 周乐明, 等. 一种功率前馈的鲁棒预测无差拍并网控制方法[J]. 中国电机工程学报, 2013, 33(36): 62-70, 10.
Chen Yandong, Luo An, Zhou Leming, et al. A robust predictive deadbeat grid-connected control method based on power feed-forward control[J]. Proceedings of the CSEE, 2013, 33(36): 62-70, 10.
(编辑 陈 诚)
Multi-Mode Model Predictive Control Strategy for the Four-Switch Buck-Boost Converter
Abstract The four-switch Buck-Boost converter can operate in multiple operating modes, which is suitable for wide voltage range conversion occasions. How to choose a suitable operating mode and achieve smooth mode switching is the key issue to be solved. In this paper, a multi-mode model predictive control (MPC) strategy for the four-switch Buck-Boost converter was proposed. According to the voltage conversion requirements, four operating modes of the converter were determined. On the basis of the traditional Buck and Boost modes, two extended modes were adopted to eliminate the control dead zone that existed in the Buck and Boost modes when the input voltage was close to the output voltage. The predictive mechanism of the model predictive control method was used to realize the predictive current control of each operating mode, and at the same time, the most suitable operating mode was selected according to the duty cycle prediction results of different operating modes in the next control cycle. Simulation and experimental results demonstrate that the proposed control strategy can effectively select the most suitable operating mode of the four-switch Buck-Boost converter and achieve smoother mode switching, and has better dynamic response performance.
keywords:Four-switch Buck-Boost, multiple operating modes, model predictive control, mode switching
DOI: 10.19595/j.cnki.1000-6753.tces.210654
中图分类号:TM46
吴 岩 男,1995年生,博士研究生,研究方向为直流微电网控制、新能源发电技术。E-mail: 19117030@bjtu.edu.cn
曾国宏 男,1966年生,副教授,博士生导师,研究方向为电力电子与电力传动、新能源发电技术等。E-mail: ghzeng@bjtu.edu.cn(通信作者)
中央高校基本科研业务费专项资金项目(2021YJS161)和中国南方电网有限责任公司科技项目(090000KK52180116)资助。
收稿日期 2021-05-08
改稿日期 2021-10-25