图1 延迟产生机理
Fig.1 The origin of the control delay
摘要 超高速永磁电机驱动系统在超高基频运行条件下,延迟会严重影响系统稳定性。该文对电流环动态模型进行精确重构,并系统分析高基频运行条件下延迟引入的交叉耦合与时延效应对系统稳定性的影响。在此基础上,提出一种适用于超高速电机的基于双采样电流预测的阻尼-积分型电流环调节机制,通过对系统阻尼比进行补偿,消除附加交叉耦合影响。此外,该文还设计一种分段执行式的双采样电流预测算法,可在不依赖任何参数的情况下实现下一拍反馈电流预测,有效补偿系统稳定裕度。以上两个措施为确保超高基频系统全局稳定提供有力保障。最后,在一台550 000r/min/110W超高速实验样机平台上,对所提改进型电流环调节机制进行充分仿真与实验分析,有效验证了所提方案的有效性与优越性。
关键词:超高速电机 稳定性 控制延迟 采样延迟 阻尼比 稳定裕度
多电/全电型航空航天系统中的电力推进系统、电力作动系统、起动/发电系统及环控系统等均朝着高功率密度、高效率、高可靠性的趋势发展[1-3]。电机系统作为上述应用领域的核心单元,具有重要意义。基于超高速电机(Ultra High Speed Motor, UHSM)的电力传动系统具有功率密度高、体积小、质量轻的显著优势[4-6],十分适合航空航天领域的性能要求,对于多电/全电型航空航天系统的发展具有重要的意义。除航空航天领域外,对于某些现代化工业应用,如高速离心式压缩机[7]、微型燃气轮起动/发电机[8-10]、飞轮储能[10]等,能够实现直驱结构,显著减小体积、质量与维护成本,同时大幅提高可靠性。超高速永磁电机相比于其他类型电机,功率密度与效率优势更为显著[11],近年来表现出逐步取代其他类型电机的趋势,研究意义与实用价值重大。
对于超高速永磁电机来说,性能优良的驱动系统是发挥其潜能的关键所在。现有驱动系统通常采用数字微控制器(Microprogrammed Control Unit, MCU)实现数字化驱动。然而,由于超高速永磁电机工作基频高,在应用磁场定向控制(Field Oriented Control, FOC)策略时,系统延迟对系统稳定性的影响难以忽略。针对高基频运行条件下,数字化FOC系统中延迟问题,国内外学者近年来开展了较为丰富的研究工作。
文献[12-18]对控制延迟于系统稳定性的影响进行了较为全面的分析。文献[13-14]对控制延迟在dq坐标系下的等效模型进行了推导。在dq坐标系下,控制延迟被等效为一个交叉耦合矩阵与两个延时环节。文献[15]从根轨迹设计的角度,考虑控制延迟,设计了高基频下的电流环调节器。文献[17-18]设计了一种复矢量调节器,即将被控指令变为指令电压的幅值和相位,该方案可一定程度改善高基频下的系统稳定性。然而,上述控制策略仅考虑系统前向通道的控制延迟,对系统反馈通道采样延迟并不关注。文献[19-20]详细分析了采样延迟对并网逆变器系统稳定性的影响,并提出了相应的优化方案,但因硬件拓扑的不同以及控制策略的差异,并不完全适用于电机驱动系统,且前述文献均未对延迟进行主动补偿。因此,探究超高速永磁电机闭环控制系统中的延迟影响及其在此基础上的有效主动补偿策略十分必要。目前,控制延迟主动补偿方法主要分为基于模型(model-based)补偿方法和不依赖模型(model-free)补偿方法两种。基于模型补偿方法主要包括史密斯预估器[21-22]、内模控制[23]以及模型预测法[24-25]等。史密斯预估器是一种经典的固定延迟补偿方案,其余两种方案均由其衍化而来。文献[23]针对一台超高速电机采用了内模控制实现延迟补偿,模型参数准确,可获取良好的补偿效果。当参数偏差较大时,补偿效果会受到影响。不依赖模型的补偿方法主要包括线性预估器[26]、滤波器法[27]以及双采样双更新法[28]等。应用线性预估器的必要条件是系统具有严格线性化的特点,然而永磁电机在高基频运行条件下非线性程度严重,线性预估器无法适用。文献[27]对不同类型的滤波器法进行了对比分析,并提出一种改进型的滤波器法,然而并未讨论高基频运行条件下的补偿性能。文献[28]所提出的双采样双更新法理论上可以完全消除数字控制系统中由计算引起的一拍延迟,然而该方法需以占空比作为判断依据并改变装载点,但多相系统中每时刻每相占空比不同,故该方案无法适用于多相系统。
本文对超高速电机驱动系统考虑延迟后dq坐标系下等效动态模型进行重构精确建模,首先,对延迟引入附加交叉耦合造成系统阻尼比降低和时延效应导致稳定裕度降低问题进行了详细定量分析,并推导了系统全局稳定必要条件。其次,针对上述两大问题,提出适用于超高速电机的基于双采样电流预测的阻尼-积分型电流环调节机制。一方面,本文基于传统有源阻尼注入[29]的思想,在考虑附加交叉耦合的基础上,提出一种阻尼-积分调节器用于电流环控制,其特点在于消除了传统PI调节器中闭环带宽与系统阻尼比之间的矛盾,进而可通过自由调节阻尼比实现补偿,消除附加交叉耦合影响;另一方面,本文利用空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)策略对称性,提出一种分段执行式的双采样电流预测算法,在不依赖模型参数的前提下对下一拍起始点电流进行实时预测,并用于电流环反馈控制,补偿系统稳定裕度,抑制动态超调。为了验证所提改进型电流环调节机制性能,本文基于一台550 000r/min/110W超高速微型永磁电机,进行了仿真与实验分析,充分验证了本文所提方案的有效性与优越性。
永磁电机通常采用磁场定向控制(Field Oriented Control, FOC)策略实现驱动。基于FOC策略系统的稳定性主要取决于其最内环,即电流环的稳定性。因此,针对超高速电机电流环进行准确的动态建模和稳定性分析十分必要。
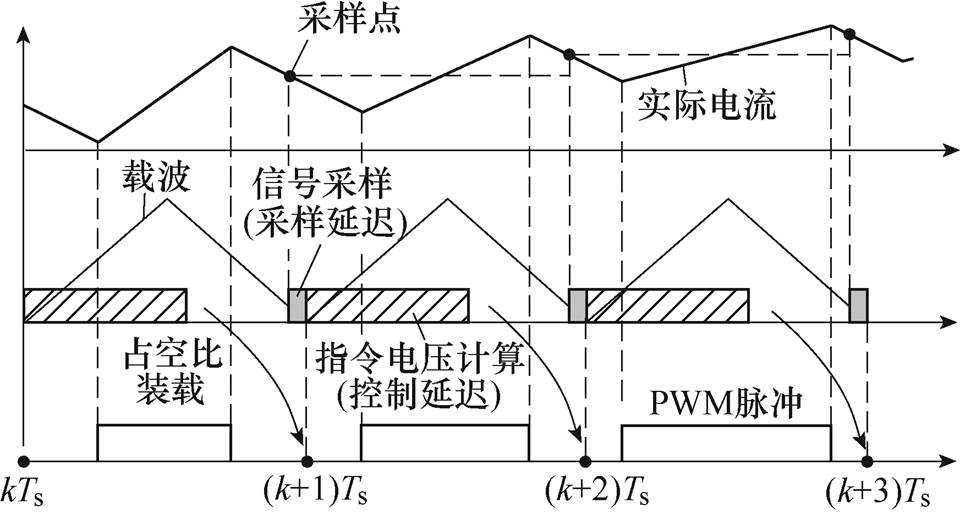
在考虑系统延迟条件下,基于MCU的永磁电机数字化驱动系统中,电流内环延迟产生机理如图1所示。
图1 延迟产生机理
Fig.1 The origin of the control delay
图1中,Ts为控制周期,定义为一拍。可以看出,整个系统的延迟可分为控制延迟和采样延迟,控制延迟主要为指令电压计算及输出引起的延迟,采样延迟主要为硬件电路中传感器、调理电路以及AD转换响应时间引起的延迟。
理想条件下,隐极式永磁电机在dq坐标系下动态数学模型为
 (1)
(1)
式中,ud,uq、id,iq为d、q轴定子电压、电流;Ls为d、q轴绕组等效电感;p为微分算子;Rs为绕组等效电阻; 为角频率;
为角频率; 为永磁体磁链幅值。
为永磁体磁链幅值。
根据式(1),可建立电流环在s域的动态控制模型,如图2所示。

图2 dq坐标系电流环模型
Fig.2 Dynamic model of the current control loop in dq-frame
从图2可以看出,理想情况下,控制对象为两个定常系数一阶惯性单元,并分别采用PI调节器实现id与iq的闭环控制。
考虑控制延迟Td与采样延迟Tc后,FOC策略的坐标变换中,派克变换与派克反变换采用的角度分别与真实角度之间存在不同的角度滞后关系,具体表现为:电流环输出指令电压 与实际输出电压us之间,存在一个相位差
与实际输出电压us之间,存在一个相位差 ;电流环输入采样电流
;电流环输入采样电流 与实际电流is之间,存在一个相位差
与实际电流is之间,存在一个相位差
 ,即:①控制延迟表现为实际电压滞后于指令电压;②采样延迟表现为采样电流滞后于实际电流。
,即:①控制延迟表现为实际电压滞后于指令电压;②采样延迟表现为采样电流滞后于实际电流。
考虑延迟后的时间-空间矢量如图3所示。
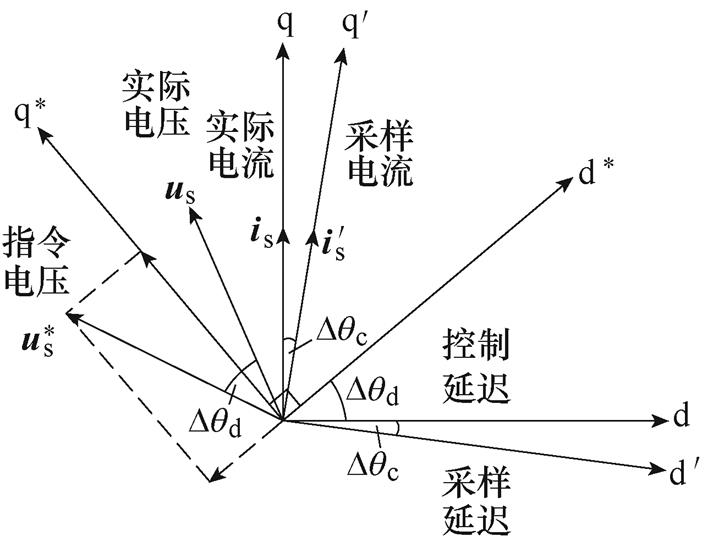
图3 考虑延迟后的时间-空间矢量
Fig.3 Time-space vector diagram with the consideration of the delay
图3中定义了一个 指令坐标系和
指令坐标系和 采样坐标系,指令坐标系和采样坐标系与dq实际坐标系的相位差分别为
采样坐标系,指令坐标系和采样坐标系与dq实际坐标系的相位差分别为 和
和 。
。
实际输出电压us与电流环输出指令电压之间相位关系可以表达为
 (2)
(2)
电流环输入采样电流与实际电流is之间的相位关系可以表达为
 (3)
(3)
式中,ud、uq分别为us在d、q坐标系下的投影值,其余相应矢量同理;为控制延迟引起的指令电压与实际电压的相位差,导致前向通道引入控制延迟交叉耦合项;为采样延迟引起的采样电流与实际电流的相位差,导致反馈通道引入采样延迟交叉耦合项。
根据式(2)和式(3),考虑延迟后电流环s域模型如图4所示,其中kp、ki分别为电流环PI调节器比例系数与积分系数。
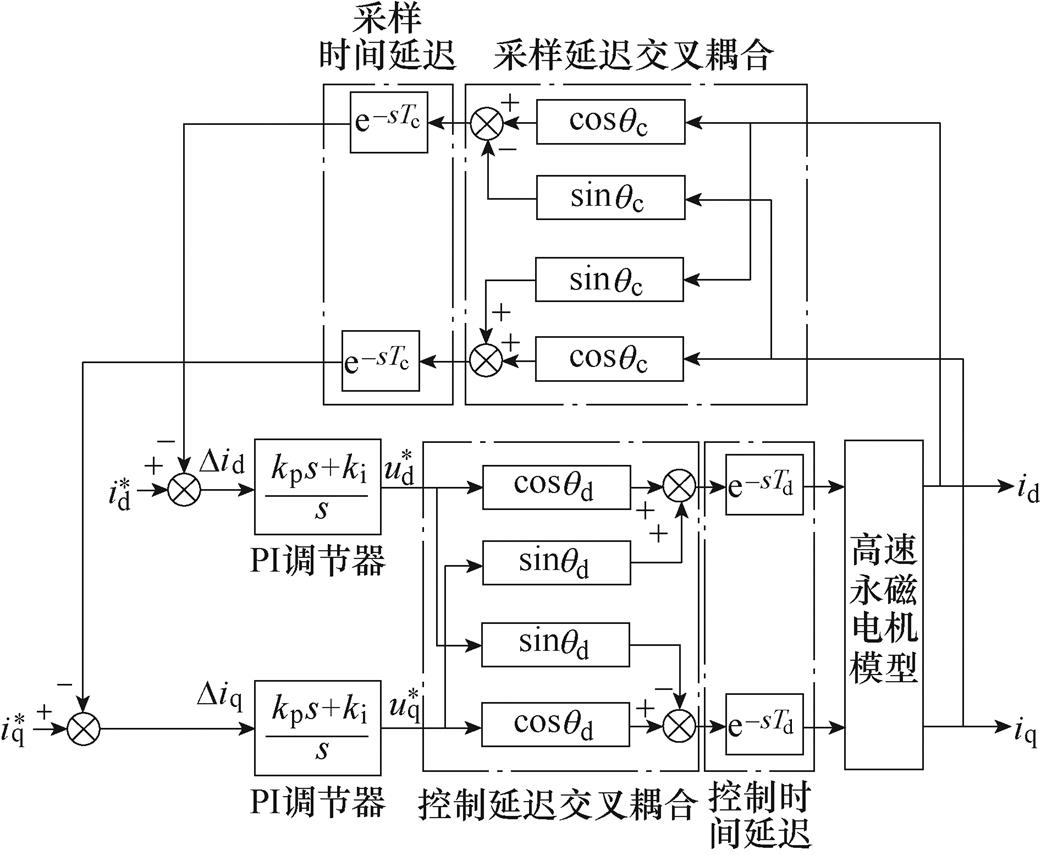
图4 考虑延迟后dq坐标系电流环模型
Fig.4 Model of current control loop in dq-frame with the consideration of delay
从图4可以看出,延迟对电流环控制模型影响主要体现为两点:
(1)在前向通道与反馈通道分别引入了一个控制延迟交叉耦合环节和采样延迟交叉耦合环节,且两者的耦合程度均随角频率 的升高而加重。
的升高而加重。
(2)由于延迟本质为时间延迟,因此前向通道与反馈通道中分别存在一个时延环节 和
和 。
。
本研究发现,前向通道和反馈通道的交叉耦合环节与时延环节对系统稳定性的影响有所不同,因此下文将对其影响和改进型驱动策略展开深入探究。
本节主要对延迟所引入的附加交叉耦合影响进行定量分析。由图3和式(2)与式(3)可知,附加交叉耦合的本质影响为us与之间的相位差和与is之间的相位差。根据式(1)、式(2)与式(3)可得考虑附加交叉耦合后dq坐标系下动态模型为
 (4)
(4)
其中





从式(4)可以看出,动态模型中的电阻、电感以及交叉耦合均发生了变化。
为了简化对附加交叉耦合影响的分析过程,暂时不考虑时延环节的影响,以iq闭环控制为例,基于式(4)与图4所示考虑延迟后电流环模型,可建立控制系统s域闭环传递函数,有
 (5)
(5)
为保证系统稳定,需通过调节kp以保证阻尼比 为正值。根据二阶系统特性,考虑附加交叉耦合后的系统稳定必要条件为
为正值。根据二阶系统特性,考虑附加交叉耦合后的系统稳定必要条件为
 (6)
(6)
从式(6)可以得到重要结论:当越高时,保证阻尼比为正值所需的kp越大,然而过大的kp必然会使控制系统中高频段的增益变大,造成闭环带宽过大,会严重影响系统性能。
通过以上分析可知,系统阻尼比与闭环带宽通过kp形成矛盾,且越高,该矛盾越严重。对于超高速电机,由于过高,该矛盾更加难以平衡。为消除阻尼比与闭环带宽之间的矛盾,以实现的自由调节,本文将电流环调节器改进为一种阻尼-积分调节器的形式,如图5所示。

图5 阻尼-积分电流调节器
Fig.5 Damping-integral current regulator
图5中,Rac即为有源阻尼项。基于图5所示电流环控制模型的闭环传递函数为
 (7)
(7)
显然,电流环模型变成了一个“标准二阶系统”。通过调节积分系数ki自由调整谐振频率 ,进而调节闭环带宽;通过调节Rac可自由调节阻尼比。闭环带宽与之间矛盾被消除。
,进而调节闭环带宽;通过调节Rac可自由调节阻尼比。闭环带宽与之间矛盾被消除。
结合式(4)与式(7)所示数学模型,阻尼比可进一步表示为
 (8)
(8)
当 为已知期望的阻尼比时,整理式(8)可得所需要注入的有源阻尼大小为
为已知期望的阻尼比时,整理式(8)可得所需要注入的有源阻尼大小为
 (9)
(9)
控制延迟主要为算法执行(一拍延迟)和脉宽调制单元等效零阶保持器(半拍延迟)引起的延迟,故控制延时Td=Ts+0.5Ts=1.5Ts。采样延时Tc难以定量确定,但传感器、运算放大器等硬件芯片的响应时间均在ns级。以AD转换时间最长的MCU芯片TMS320F28377D为例,其时间约为150ns,对于控制频率为100kHz的超高速电机控制系统,反馈通道采样延迟Tc仅为前向通道控制延迟Td的1.5%,基于此条件下,式(9)可简化为
 (10)
(10)
其中

由以上分析可知,在本文设计的阻尼-积分调节器中,根据式(8)可将电流环阻尼比实时调整为任意期望值,进而对附加交叉耦合所造成的阻尼比降低进行有效补偿。
虽然采用改进型的电流调节器对附加交叉耦合的影响进行了消除,保证全速范围内阻尼比为期望值,然而电流环的前向通道和反馈通道中仍然存在时延环节 和。本节针对时延环节对系统稳定性影响以及相应补偿策略进行了深入探究。
和。本节针对时延环节对系统稳定性影响以及相应补偿策略进行了深入探究。
据经典控制理论中的频响特性理论,时延环节会使得相频特性整体滞后,进而造成相位裕度降低。时延环节对系统稳定裕度的影响如图6所示。
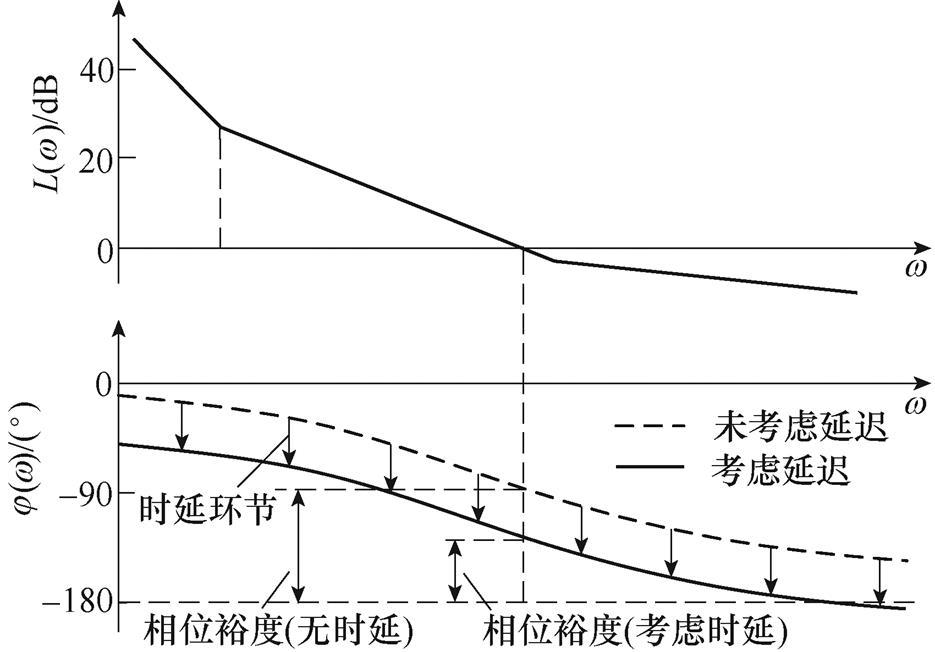
图6 时延环节对系统稳定裕度影响
Fig.6 The impact of the time delay to the stability margin
相位裕度的降低会影响动态调节期间的快速性与稳定性。而且,由于高速电机通常具有较小的电感,相位裕度的降低还会加剧电流过冲的风险,不利于驱动系统可靠性。
本文在传统补偿策略思想的基础上,设计了一种不依赖系统模型的电流预测方案,其主要原理在于利用SVPWM策略一个开关周期内占空比的对称性,通过对起点电流和中点电流进行采样来实时预测下一拍起点电流,并作为电流反馈,从而达到消除算法执行所引起的一拍延迟的目的。余下半拍控制延迟由PWM等效零阶保持器引起,理论上难以消除,但由于该延迟只有半拍,对系统稳定性的影响已较小,因此可忽略不计。
中心对称SVPWM算法在单个开关周期内的发波顺序与电流变化规律如图7所示。
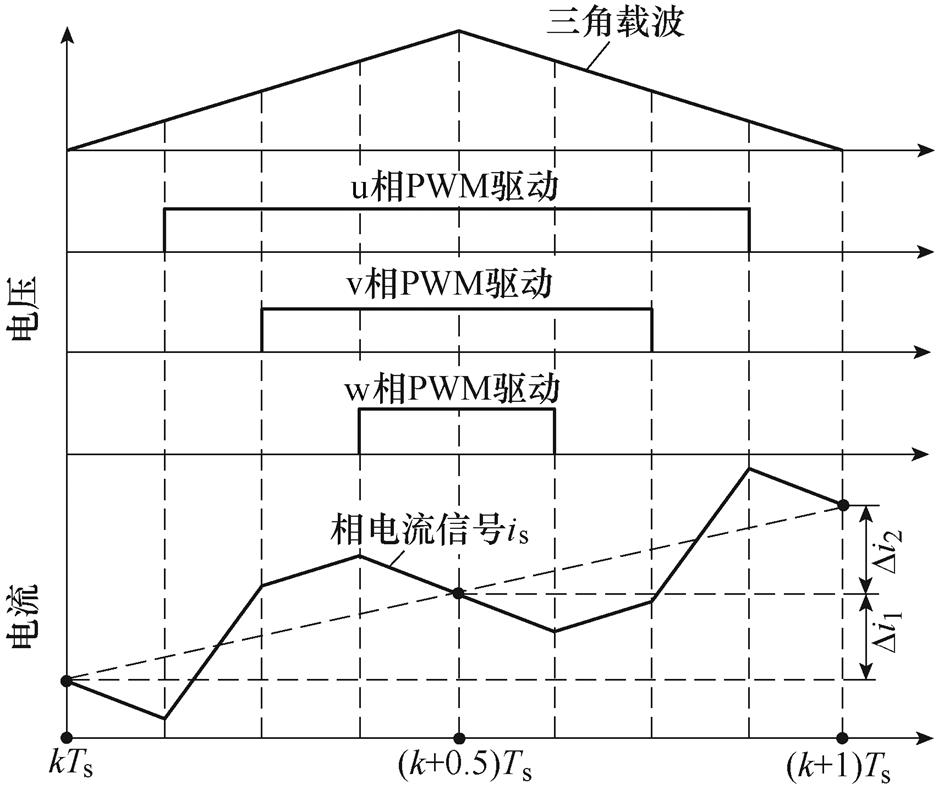
图7 “七段式”中心对称SVPWM方法电流变化规律
Fig.7 The change of the current under ‘7-steps’ central symmetry SVPWM strategy
从图7可以看出,前半开关周期的占空比与后半开关周期的占空比一致,若不考虑反电动势变化,近似有Di1≈Di2,利用该特性,可以实现下一拍起点时刻相电流值的预测为
 (11)
(11)
式中,is为对应时刻相电流。式(11)即为所提出双采样电流预测器。
本文所设计双采样电流预测器依据SVPWM策略对称性,可实现电流反馈信号实时预测,有效补偿系统稳定裕度。相比于传统补偿策略,本方案无需依赖任何模型参数,鲁棒性强。
根据3.2节分析可知,电流环算法需在载波中点完成采样并根据式(11)完成电流预测后执行,为保证控制算法具有最高的执行效率,本文将原FOC算法拆为两段进行,两段式算法执行机制如图8所示。
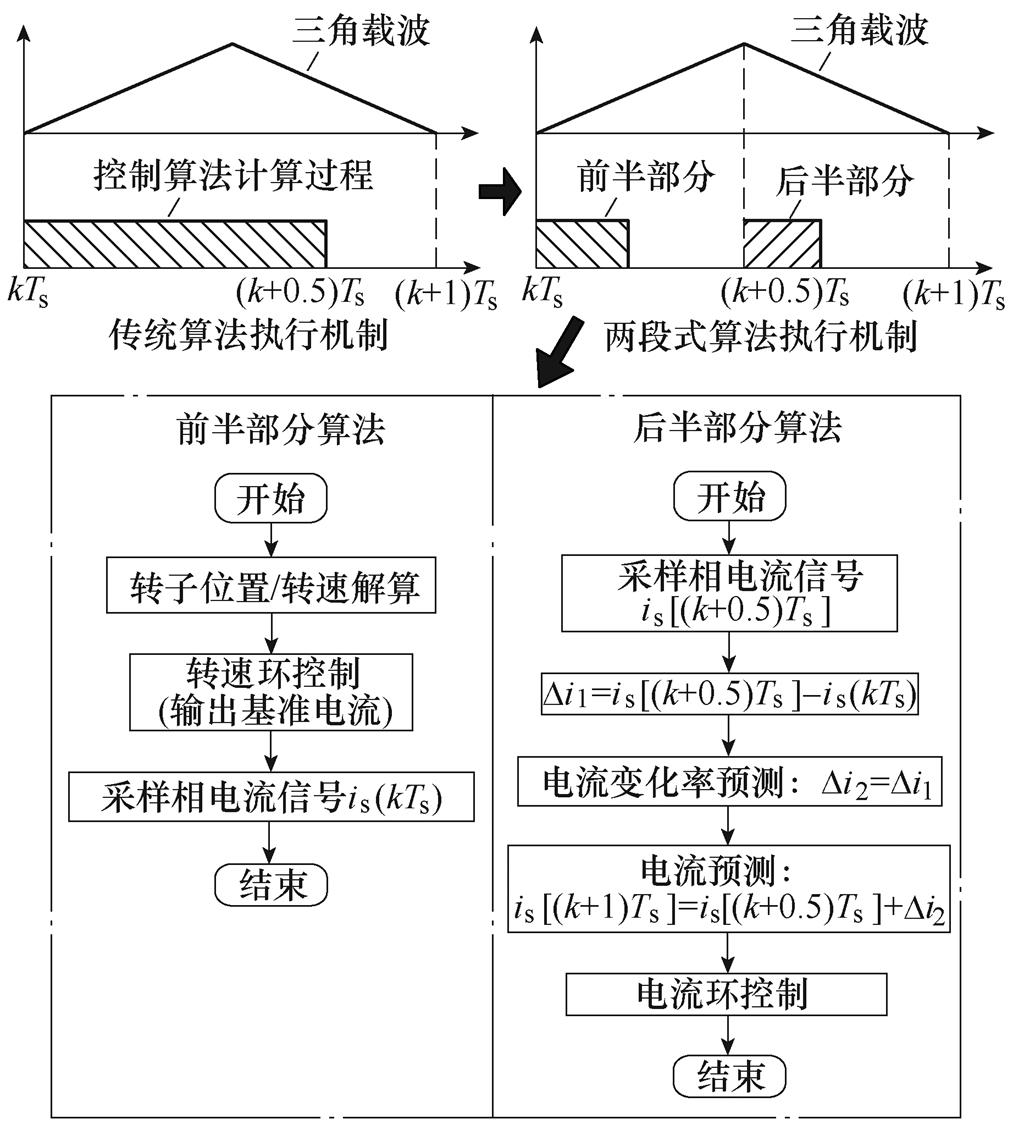
图8 两段式算法执行机制
Fig.8 Two-step algorithm execution mechanism
图8中,前半部分算法实现转子位置/转速信号解算与转速环计算,并同时采样相电流值is(kTs),后半部分算法采样相电流值is[(k+0.5)Ts],并根据式(11)对下一拍起点相电流值进行预测,随后执行电流环控制算法。
为了验证本文所设计的改进型电流环调节器的理论正确性,本文在Matlab/Simulink环境下,针对一台超高速永磁无刷电机进行了充分仿真分析。仿真样机的参数见表1。
表1 样机参数
Tab.1 Parameters of the prototype
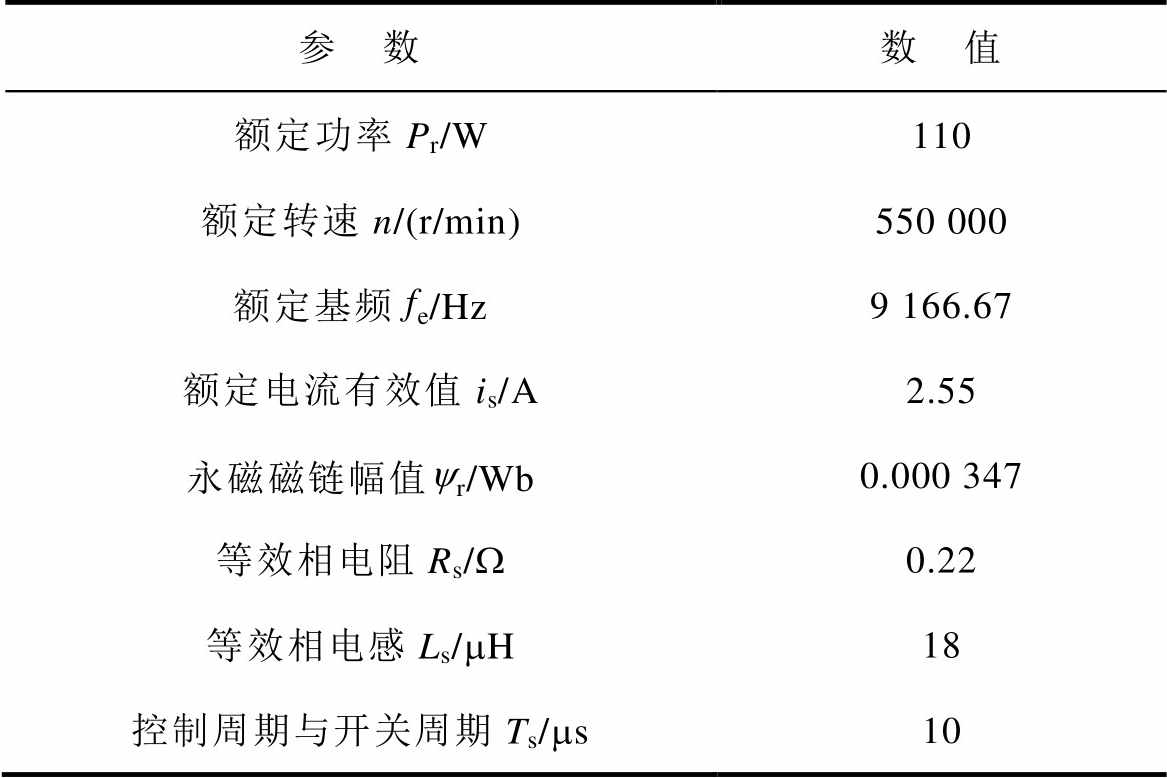
参 数数 值 额定功率Pr/W110 额定转速n/(r/min)550 000 额定基频fe/Hz9 166.67 额定电流有效值is/A2.55 永磁磁链幅值yr/Wb0.000 347 等效相电阻Rs/W0.22 等效相电感Ls/mH18 控制周期与开关周期Ts/ms10
设定电流环带宽为500Hz,图9给出了表1所示参数样机基于传统PI调节器(kp=0.01, ki=300)条件下的闭环传递函数随基频fe变化的广义根轨迹分析。
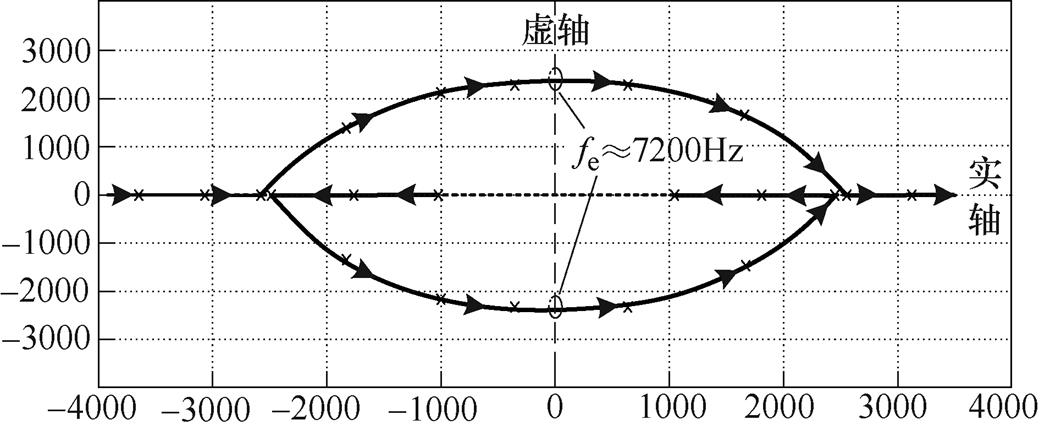
图9 随fe变化的广义根轨迹
Fig.9 Generalized root locus along with the change of fe
从图9可以看出,当运行基频超过7.2kHz,即转速超过432 000r/min后,闭环特征根进入右半平面,系统将失去稳定性。图10给出了电机从起动加速至550 000r/min并进入稳态后的运行情况。
从图10可以看出,基于传统PI调节器,当转速超过420 000r/min后,由于阻尼比变为负值,电流环失稳。
设定期望阻尼比 =0.707,图11给出基于本文所提出阻尼-积分电流调节器从起动加速至550 000r/min并进入稳态后的运行情况。
=0.707,图11给出基于本文所提出阻尼-积分电流调节器从起动加速至550 000r/min并进入稳态后的运行情况。
从图11可以看出,采用本文所提阻尼-积分电流调节器,并取=0.707后,电机能够稳定加速至550 000r/min并进入稳态运行。仿真结果验证了本文针对附加交叉耦合分析的正确性和所提出阻尼-积分电流调节器的有效性。
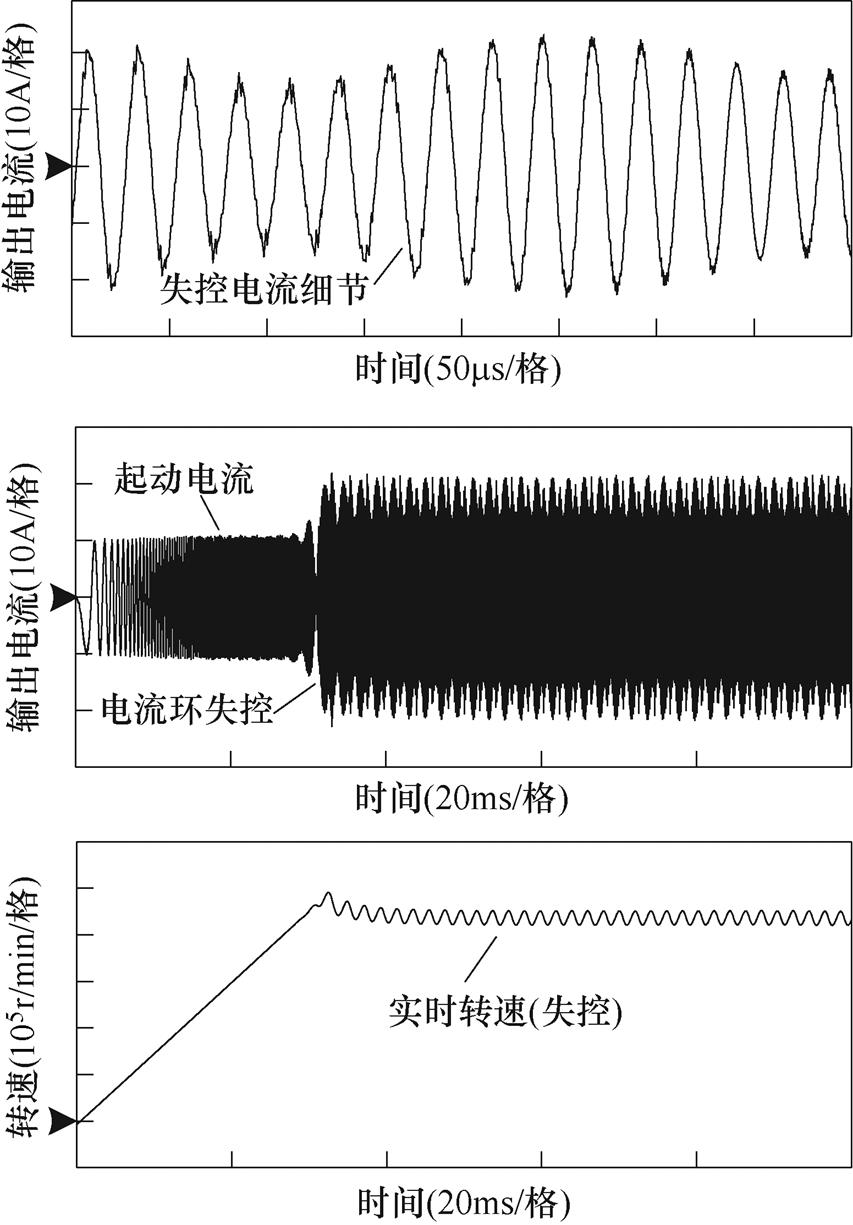
图10 传统PI调节器运行仿真结果
Fig.10 Simulation results based on the traditional PI

图11 阻尼-积分型电流调节器运行仿真结果
Fig.11 Simulation results based on the Damping-Integral current regulator
为验证延迟影响下驱动系统动态响应性能,图12与图13分别给出550 000r/min运行条件下电流采样仿真结果,以及不同 时,电流环阶跃响应仿真结果,其中|is|为输出电流幅值。
时,电流环阶跃响应仿真结果,其中|is|为输出电流幅值。
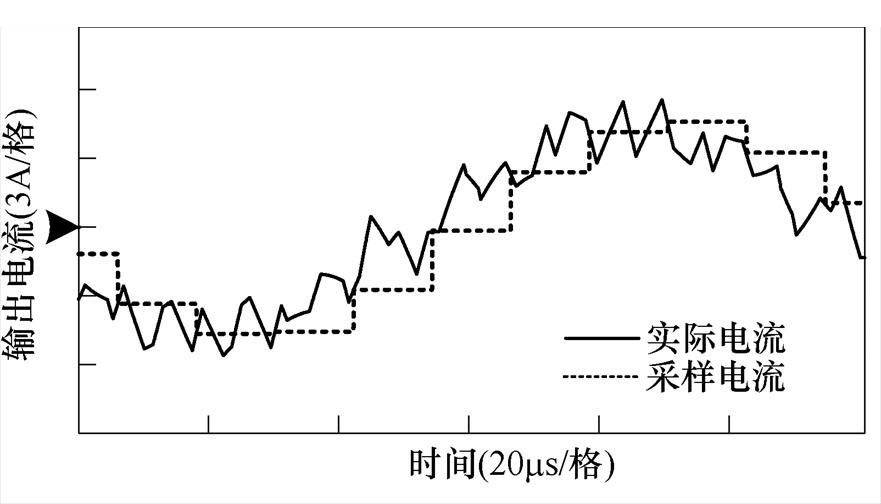
图12 电流采样仿真结果
Fig.12 Simulation results of current sampling
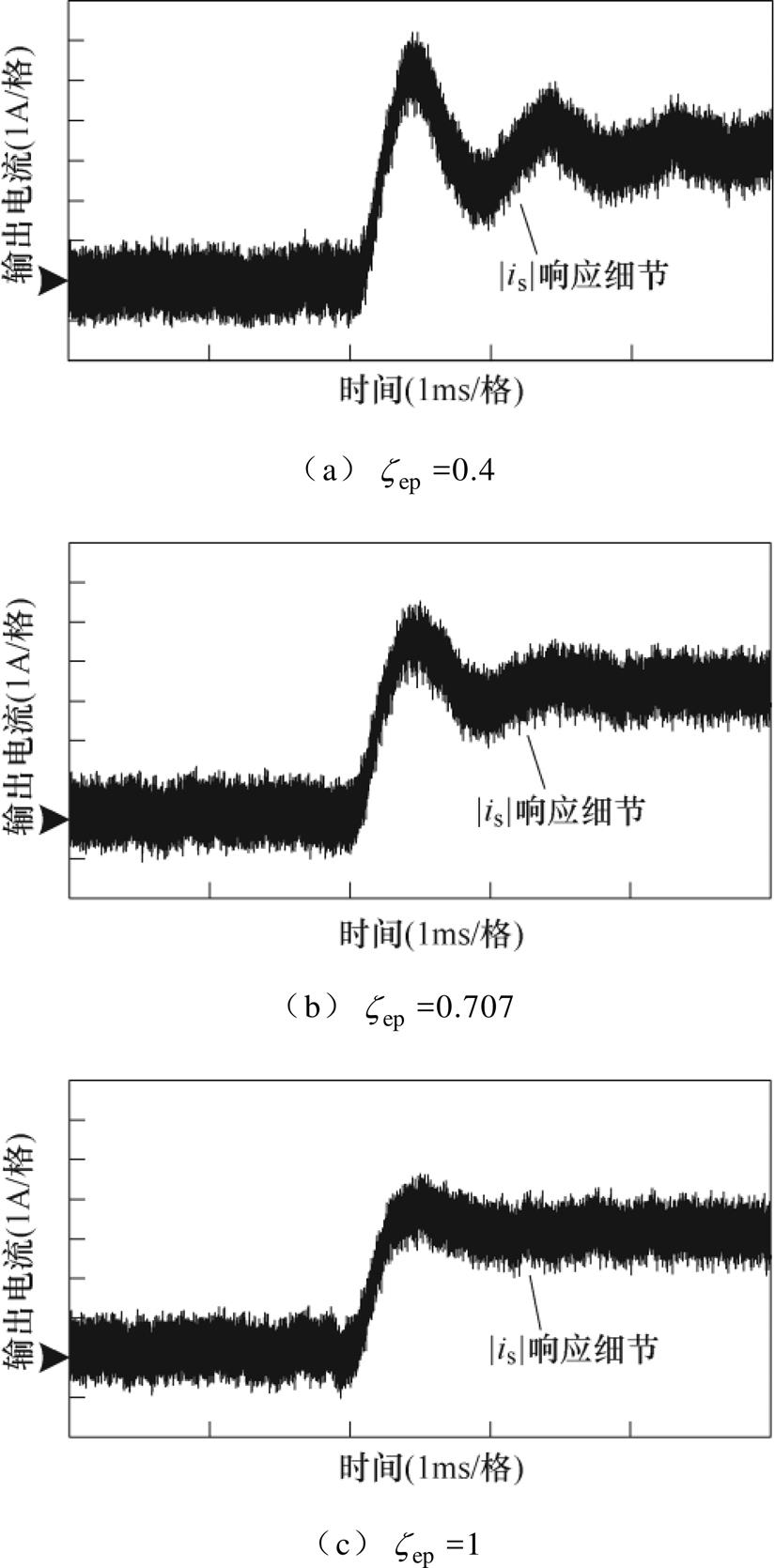
图13 不同 下的阶跃响应仿真结果
下的阶跃响应仿真结果
Fig.13 Simulation results of step signal response under different
从以上仿真结果来看,当由小变大时,电流环阶跃响应时的超调量也逐渐减小。当=1时,理论上阶跃响应应为无超调状态,然而由于时延环节所引起稳定裕度降低,系统仍存在超调。
考虑到反馈通道采样延迟Tc仅为前向通道控制延迟Td的1.5%,本节以考虑控制时延环节 为主,将其等效为一阶惯性环节1/(sTd+1)。此时式(7)所示的系统闭环传递函数变化为
为主,将其等效为一阶惯性环节1/(sTd+1)。此时式(7)所示的系统闭环传递函数变化为
 (12)
(12)
图14给出了 =1,考虑与未考虑时延环节时,式(12)所示闭环传递函数随基频fe变化的广义根轨迹图。
=1,考虑与未考虑时延环节时,式(12)所示闭环传递函数随基频fe变化的广义根轨迹图。

图14 随fe变化的广义根轨迹
Fig.14 Generalized root locus along with the change of fe
由图14可以看出,未考虑时延环节时,=1的条件下,系统主导极点位于实轴上。考虑时延环节后,系统主导极点变化为一对共轭复极点,即控制系统变为了欠阻尼状态,从而引起超调。可通过增大阻尼比的方式抑制超调,然而增大阻尼比需要牺牲内环动态性能,而超高速电机驱动系统对内环动态性能要求较高。为解决上述矛盾,本文提出一种双采样电流预测器,实现简单,仅增加极小运算量。
图15与图16分别给出550 000r/min运行条件下,电流采样仿真结果,以及不同时,基于所提出双采样电流预测器的阶跃响应仿真情况。
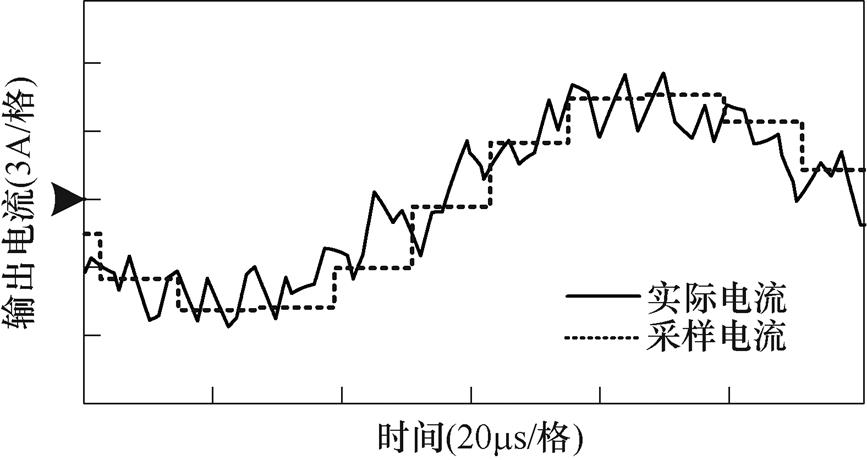
图15 基于双采样电流预测器电流采样仿真结果
Fig.15 Simulation results of current sampling based on the proposed double-sampling current predictor
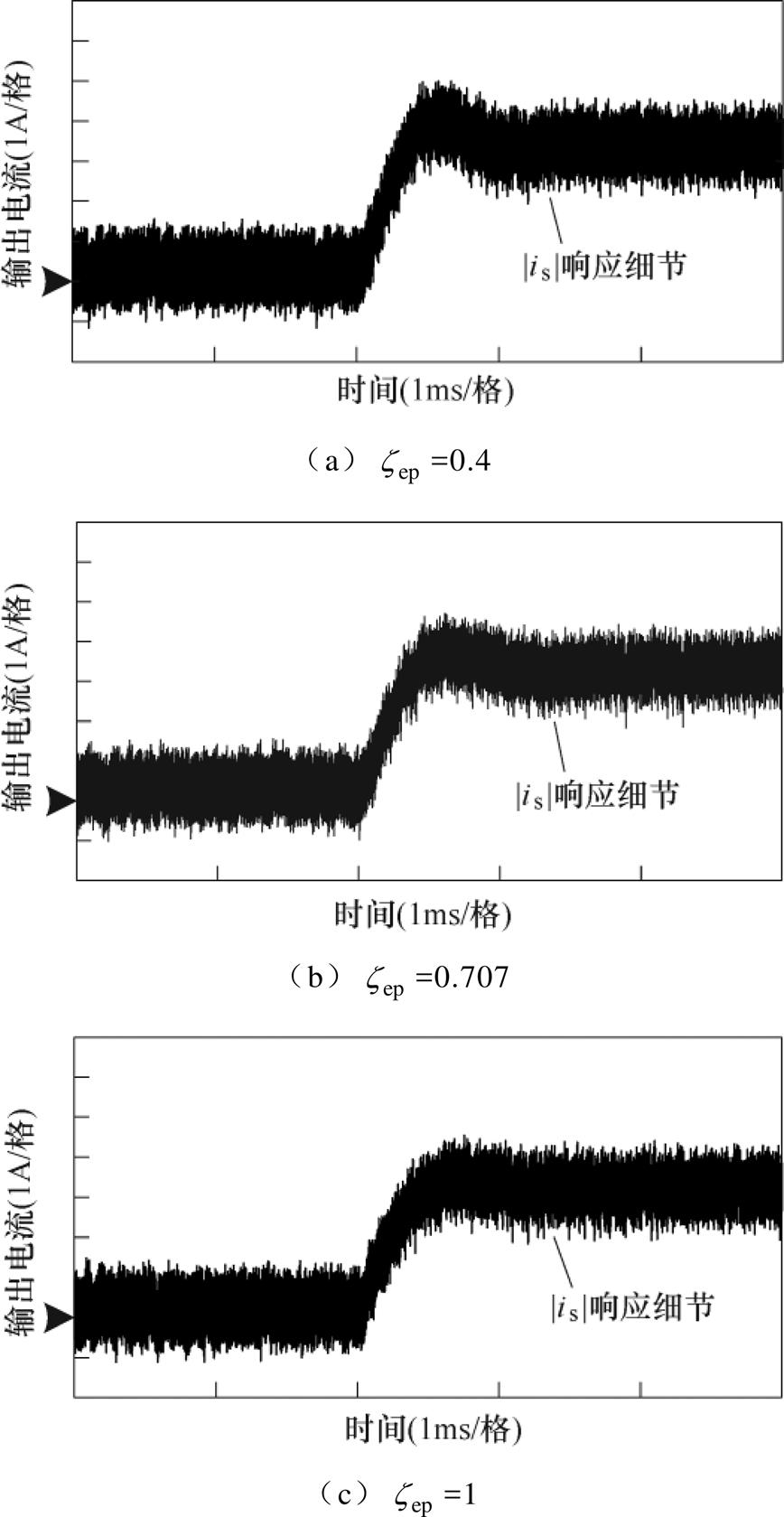
图16 基于双采样电流预测器不同下阶跃响应仿真
Fig.16 Simulation results of step signal response under different with the proposed double-sampling current predictor
表2总结了不同下采用本文所提双采样预测器前后的超高速电机驱动系统电流环阶跃响应性能仿真对比,其中调节时间的误差带选取D =5%。
表2 电流环阶跃响应性能仿真对比
Tab.2 Simulation comparison of step response performance of current loop
系统阻尼比性能指标不采用采用 0.4最大超调量s(%)5124 调节时间ts/s2.61.2 0.707最大超调量s(%)3816 调节时间ts/s1.81.0 1最大超调量s(%)202 调节时间ts/s1.20.8
基于图16与表2,可以看出,加入双采样电流预测器可有效改善算法执行所带来的一拍时间延迟影响,补偿稳定裕度,在系统阻尼比=1的条件下,采用所提预测器后最大超调量 降低90%,使得电流环阶跃响应能够获取接近理想下的性能,且电流环动态性能较好。
降低90%,使得电流环阶跃响应能够获取接近理想下的性能,且电流环动态性能较好。
上述仿真分析结果充分证明了所提出阻尼-积分调节器与双采样电流预测器对延迟补偿的有效性,下文将通过实验分析对所提出方案进行进一步验证。
本节针对表1所示550 000r/min/110W超高速永磁实验样机对所提出改进型电流控制方案进行了验证。为了获取足够高的开关频率,本文采用氮化镓(GalliumNitride, GaN)功率器件配合数字信号处理器(Digital Signal Processor, DSP)微处理器实验驱动平台设计,所设计驱动器实验平台以及550 000r/min/110W超高速永磁无刷电机如图17所示。
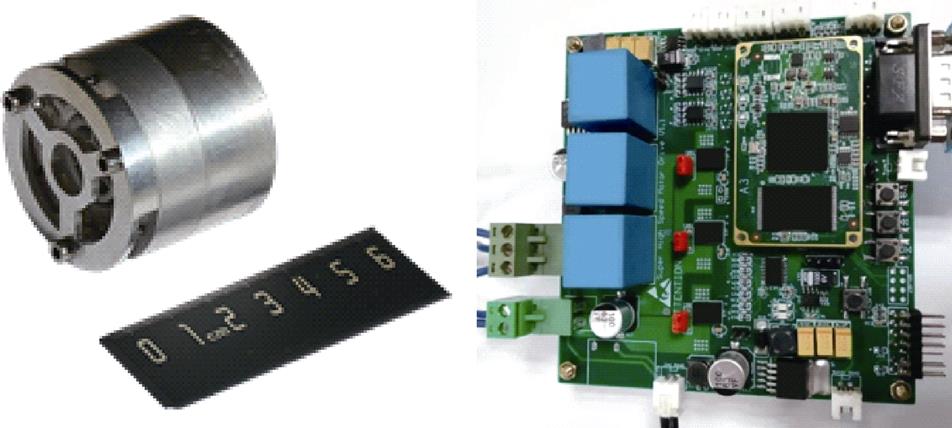
图17 超高速永磁电机驱动系统实验平台
Fig.17 The experimental platform of ultra-high speed permanent magnet motor drive
本文首先针对电机起动至550 000r/min的情况,对传统PI调节器,以及改进型电流调节器在最佳期望阻尼比(=0.707)下的起动与稳态性能进行了验证,实验结果如图18、图19所示。
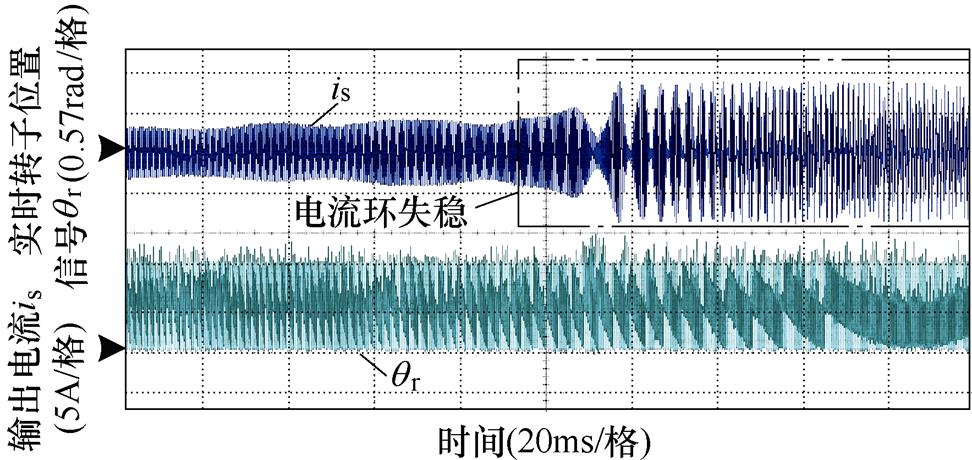
图18 基于传统PI调节器的升速实验结果
Fig.18 The experimental results of acceleration based on the traditional PI regulator
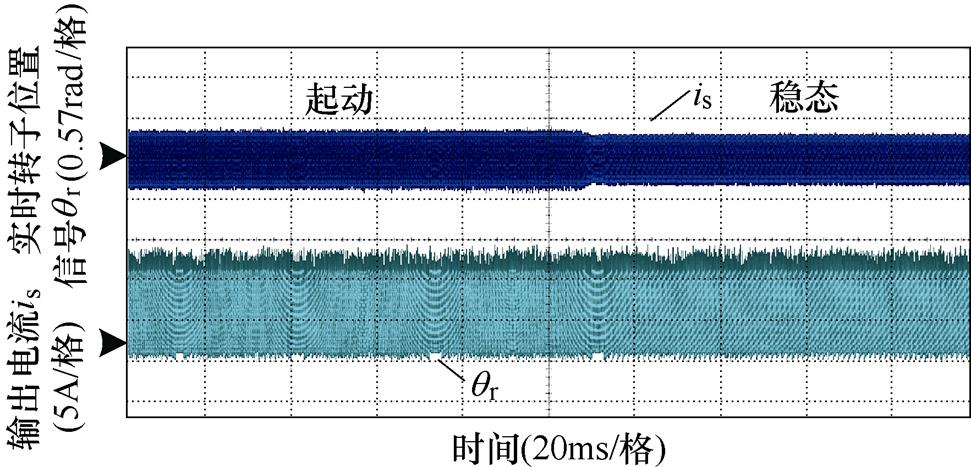
图19 基于阻尼-积分电流调节器的升速实验结果
Fig.19 The experimental results of acceleration based on the Damping-Integral current regulator
从图18和图19可以看出,当采用传统的PI调节器实现电流环控制时,系统运行至高速区时出现了失控情况,而采用本文所提出的改进型电流调节器后,系统可以平稳加速至550 000r/min,并实现稳定运行。图20给出了超高速实验样机在550 000r/min稳定运行时的输出电流细节实验结果。
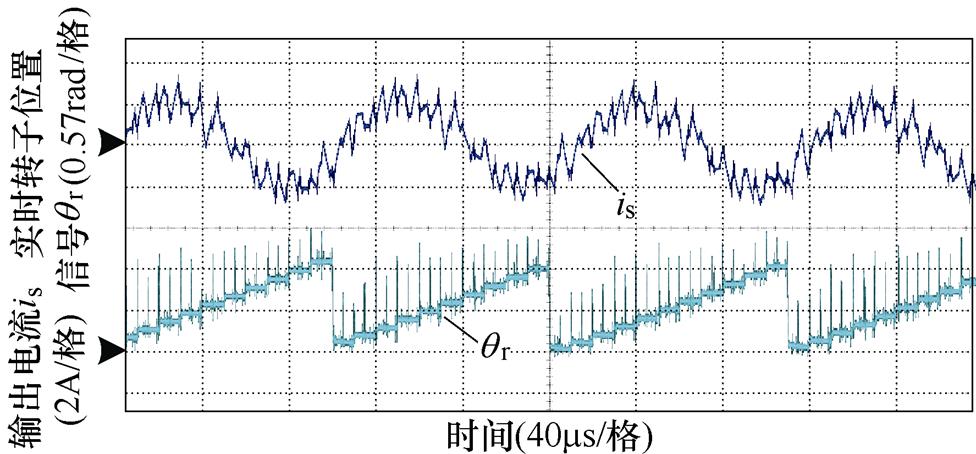
图20 550 000r/min稳态运行实验结果
Fig.20 Steady-state operation at 550 000r/min
上述实验结果充分验证了本文所提出改进型电流调节器对系统阻尼比补偿的有效性。
对应于仿真分析,本文对电流采样结果,以及=0.4、=0.707、=1三种情况下的电流阶跃响应性能进行了实验分析,如图21、图22所示。

图21 电流采样实验结果
Fig.21 Experimental results of current sampling
从上述实验结果可以看出,当=1时,由于时延环节的影响,阶跃响应仍会出现微小超调。图23和图24给出采用了本文所提出的双采样电流预测器后,电流采样结果以及不同下的阶跃响应实验结果。
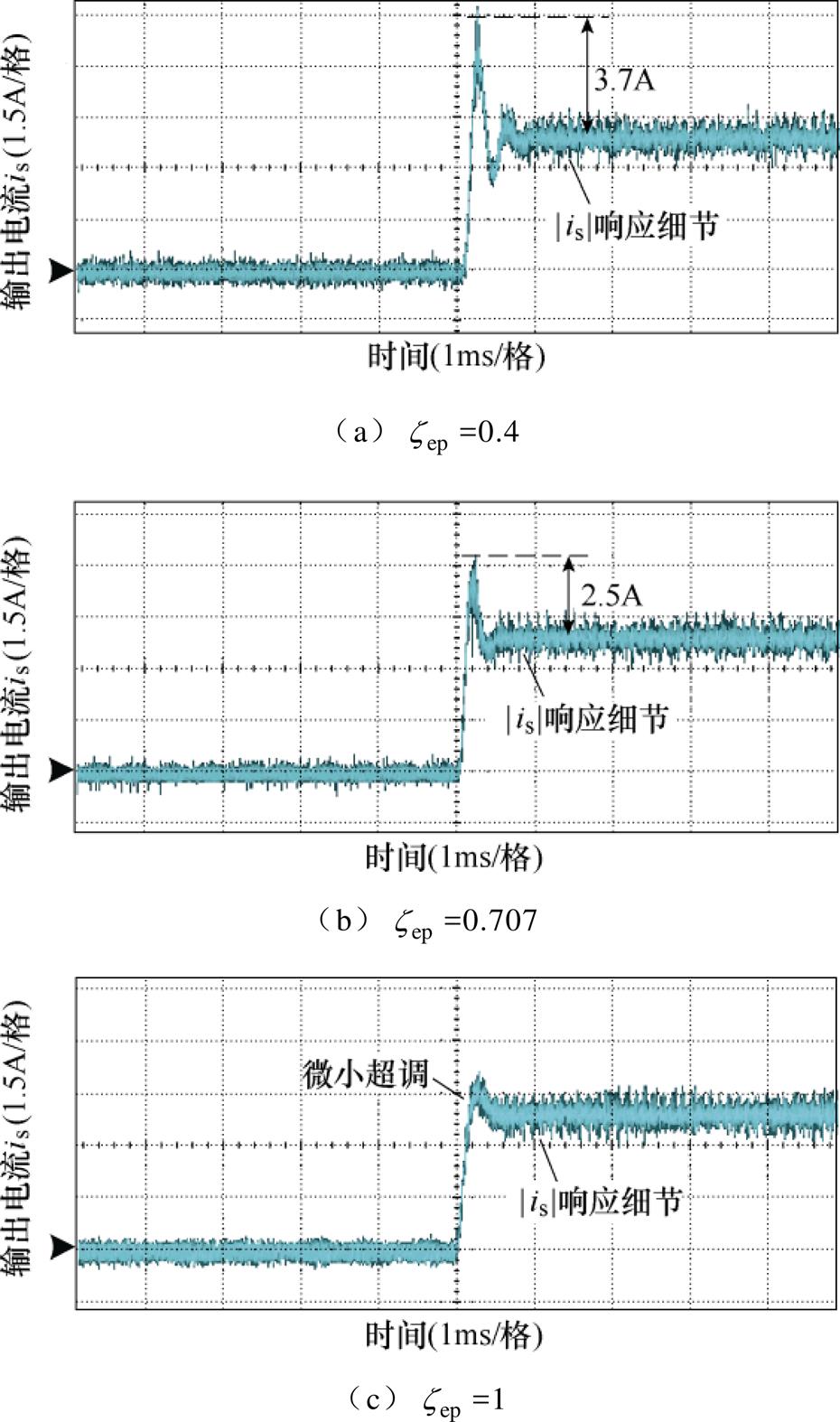
图22 不同下的阶跃响应实验结果
Fig.22 Experimental results of step signal response under different
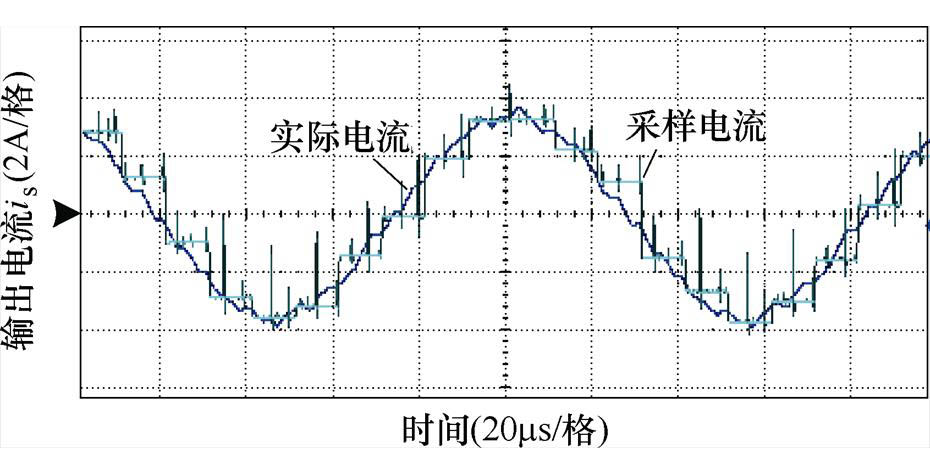
图23 基于双采样电流预测器电流采样实验结果
Fig.23 Experimental results of current sampling based on the proposed double-sampling current predictor
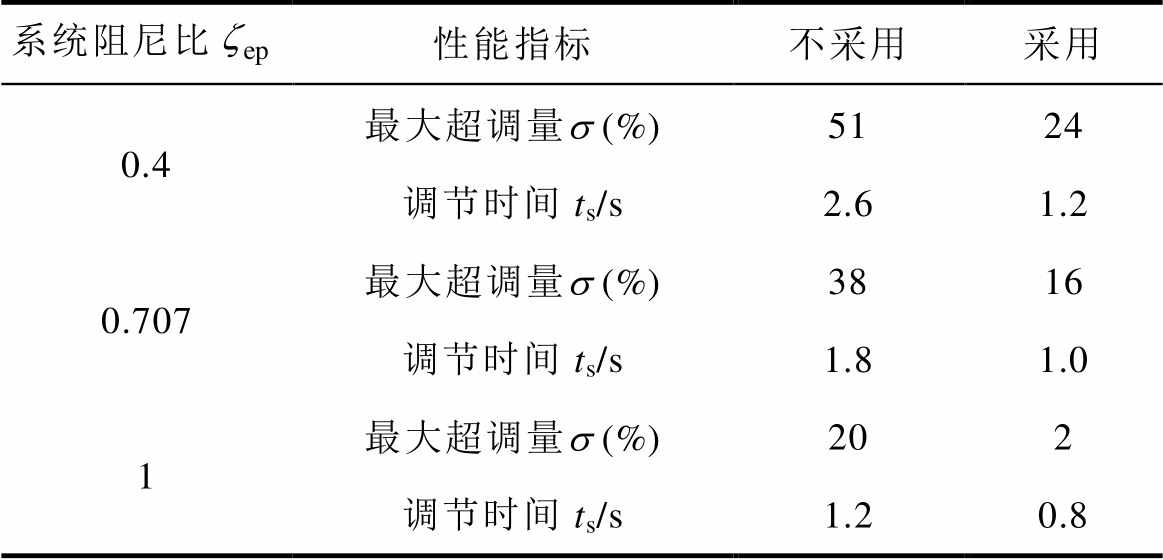
表3总结了不同下采用本文所提双采样预测器前后的超高速电机驱动系统电流环阶跃响应性能实验对比,其中调节时间的误差带选取D =5%。
基于图24与表3,可以看出,当采用双采样电流预测器与改进型电流调节器配合运行后,在系统阻尼比=1的条件下,采用所提预测器后最大超调量降低91%,阶跃响应获得与理想接近的控制效果,且电流环动态性能较好。实验结果与理论和仿真所得结论相符合。
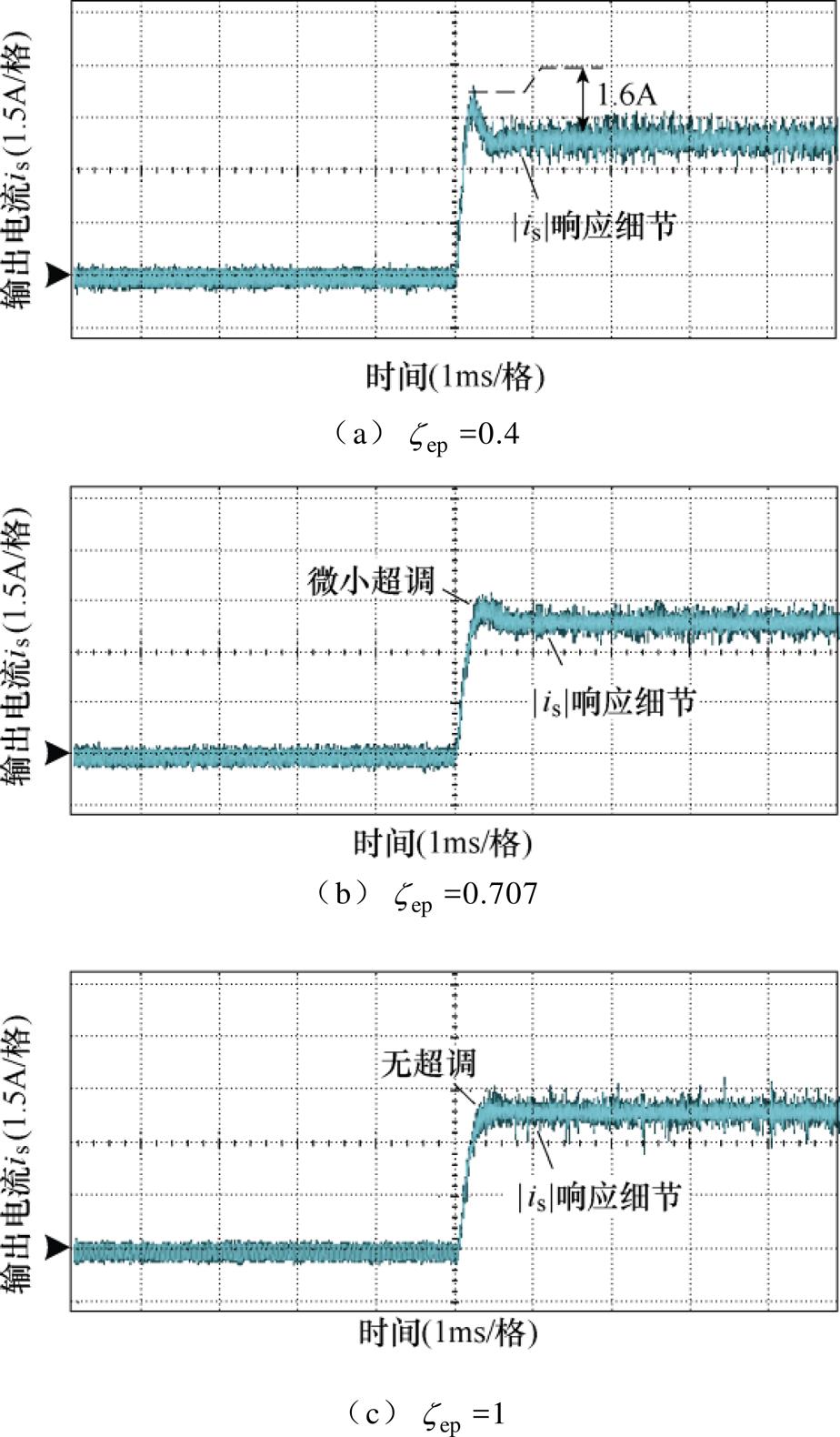
图24 基于双采样电流预测器不同下的阶跃响应实验结果
Fig.24 Experimental results of step signal response under different based on the proposed double-sampling current predictor
表3 电流环阶跃响应性能实验对比
Tab.3 Experimental comparison of step response performance of current loop

系统阻尼比性能指标不采用采用 0.4最大超调量s(%)9240 调节时间ts/s10.8 0.707最大超调量s(%)6215 调节时间ts/s0.70.7 1最大超调量s(%)222 调节时间ts/s0.60.6
综上所述,上述实验分析结果显示,本文所提阻尼-积分型电流调节器与双采样电流预测器配合运行,能够有效抑制附加交叉耦合与时间延迟效应对系统的不利影响,进而改善系统在高基频运行条件下的稳定性。
本文主要在考虑超高速永磁电机驱动系统超高运行基频特点下,通过对电流环动态模型重构精确建模,深入分析延迟对系统稳定性的影响,并提出相应的补偿策略,具体内容包括:
1)在考虑高基频系统延迟的条件下,对电流环动态模型进行重构精确建模,深入分析延迟对系统稳定性的影响:①延迟在原电流环动态模型的前向通道和反馈通道分别引入一个附加交叉耦合,从而降低系统阻尼比,降低电流环稳定性,严重时甚至会造成负阻尼比进而导致系统失稳;②时延效应将明显降低系统稳定裕度,造成动态超调增大。
2)基于考虑附加交叉耦合后电流环动态模型变化情况,提出了一种适用于超高速电机驱动系统的阻尼-积分型电流调节器,并推导了实现期望阻尼比的补偿条件,给出了设计原则。所提方案避免了传统超高速电机驱动系统阻尼比与闭环带宽之间的矛盾,实现了高基频下系统阻尼比有效补偿,保证系统全局稳定性。
3)针对时间延迟效应造成的系统稳定裕度降低问题,本文提出了一种适用于高基频低载频比的分段执行式的双采样电流预测算法,利用预测电流值作为反馈电流进行电流环控制,有效补偿了稳定裕度,抑制动态超调,实现电流环接近理想阻尼比下的控制性能,且电流环动态性能较好。本文所提电流预测器无需依赖任何模型参数,且实现简单、鲁棒性较强。
最后,本文基于一台550 000r/min/110W超高速永磁电机完成了相应仿真与实验,充分验证了所提出改进型电流环控制方案的有效性与优越性。
参考文献
[1] 周天豪, 杨智, 祝长生, 等. 电磁轴承高速电机转子系统的内模-PID控制[J]. 电工技术学报, 2020, 35(16): 3414-3425.
Zhou Tianhao, Yang Zhi, Zhu Changsheng, et al. Internal model control-PID control of an active magnetic bearing high-speed motor rotor system[J]. Transactions of China Electrotechnical Society, 2020, 35(16): 3414-3425.
[2] 寇宝泉, 葛庆稳, 张浩泉, 等. 双边错位高速永磁直线同步电机的设计与分析[J]. 电工技术学报, 2021, 36(6): 1149-1158.
Kou Baoquan, Ge Qingwen, Zhang Haoquan, et al. Design and analysis of double-sided dislocated high speed permanent magnet linear synchronous motors[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1149-1158.
[3] Sarlioglu B, Morris C T. More electric aircraft: review, challenges, and opportunities for commercial transport aircraft[J]. IEEE Transactions on Transport- ation Electrification, 2015, 1(1): 54-64.
[4] Tenconi A, Vaschetto S, Vigliani A. Electrical machines for high-speed applications: design con- siderations and tradeoffs[J]. IEEE Transactions on Industrial Electronics, 2014, 61(6): 3022-3029.
[5] Gerada D, Mebarki A, Brown N L, et al. High-speed electrical machines: technologies, trends, and developments[J]. IEEE Transactions on Industrial Electronics, 2014, 61(6): 2946-2959.
[6] 张凤阁, 杜光辉, 王天煜, 等. 高速电机发展与设计综述[J]. 电工技术学报, 2016, 31(7): 1-18.
Zhang Fengge, Du Guanghui, Wang Tianyu, et al. Review on the development and design of high speed machines[J]. Transactions of China Electrotechnical Society, 2016, 31(7): 1-18.
[7] Kolondzovski Z, Arkkio A, Larjola J, et al. Power limits of high-speed permanent-magnet electrical machines for compressor applications[J]. IEEE Transactions on Energy Conversion, 2010, 26(1): 73-82.
[8] Ma Xiaohe, Su Rong, Jet T K, et al. Review of high-speed electrical machines in gas turbine elec- trical power generation[C]//IEEE Region 10 Conference, Macao, China, 2015: 1-9.
[9] Epstein A H. Millimeter-scale, micro-electro-mechanical systems gas turbine engines[J]. Journal of Engineering for Gas Turbines and Power, 2004, 126(2): 205-226.
[10] 余志强, 孙晓云, 邱清泉, 等. 电机外置式径向型高温超导飞轮储能系统样机悬浮测试及旋转实验[J]. 电工技术学报, 2019, 34(10): 2166-2175.
Yu Zhiqiang, Sun Xiaoyun, Qiu Qingquan, et al. Levitation test and rotation experiment of radial-type superconducting flywheel energy storage system prototype with external motor[J]. Transactions of China Electrotechnical Society, 2019, 34(10): 2166-2175.
[11] Krishnan R. 永磁无刷电机及其驱动技术[M]. 北京: 机械工业出版社, 2013.
[12] Choi C, Lee W. Analysis and compensation of time delay effects in hardware-in-the-loop Simulation for automotive PMSM drive system[J]. IEEE Transa- ctions on Industrial Electronics, 2012, 59(9): 3403- 3410.
[13] 国敬, 范涛, 章回炫, 等. 高速低载波比下永磁同步电机电流环稳定性分析[J]. 中国电机工程学报, 2019, 39(24): 7336-7346.
Guo Jing, Fan Tao, Zhang Huixuan, et al. Stability analysis of permanent magnet synchronous motor current loop control at high speed and low carrier ratio[J]. Proceedings of the CSEE, 2019, 39(24): 7336-7346.
[14] Bae B H, Sul S K. A compensation method for time delay of full-digital synchronous frame current regulator of PWM AC drives[J]. IEEE Transactions on Industry Applications, 2003, 39(3): 802-810.
[15] Novak M, Novak Z. Stability issues of high-speed PMSM feedback control systems[C]//15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2013: 1-9.
[16] Holmes D G, Lipo T A, Mcgrath B P, et al. Optimized design of stationary frame three phase AC current regulators[J]. IEEE Transactions on Power Electro- nics, 2009, 24(11): 2417-2426.
[17] 伍小杰, 袁庆庆, 符晓, 等. 基于复矢量调节器的低开关频率同步电机控制[J]. 中国电机工程学报, 2012, 32(3): 124-129.
Wu Xiaojie, Yuan Qingqing, Fu Xiao, et al. A novel complex state current controller for synchronous motors at very low switching frequency[J]. Pro- ceedings of the CSEE, 2012, 32(3): 124-129.
[18] Holtz J, Quan J, Schmittt G, et al. Design of fast and robust current regulators for high power drives based on complex state variables[C]//Industrial Application Society Annual Meeting, Salt Lake City, UT, USA, 2003: 1997-2004.
[19] 邹常跃, 刘邦银, 段善旭, 等. 并网逆变器中数字控制延时对系统稳定性的影响及其优化设计[J]. 中国电机工程学报, 2015, 35(2): 411-417.
Zou Changyue, Liu Bangyin, Duan Shanxu, et al. Influence of delay on system stability and its optimization in grid-connected inverters[J]. Pro- ceedings of the CSEE, 2015, 35(2): 411-417.
[20] 董方明. 基于减小延时和采样补偿的LCL型并网逆变器有源阻尼研究[D]. 武汉: 华中科技大学, 2017.
[21] Schmirgel H, Krah J O, Berger R. Delay time compensation in the current control loop of servo drives-higher bandwidth at no trade-off[C]//Power Conversion Intelligent Motion Conference, Shanghai, China, 2006: 541-546.
[22] Klarenbach C, Schmirgel H, Krah J O. Design of fast and robust current controllers for servo drives based on space vector modulation[J]. Power Conversion Intelligent Motion Conference, Beijing, China, 2011: 182-188.
[23] Borisavljevic A, Brands M, Lomonova E. Vector control of very-high-speed PM machines[C]//Inter- national Conference on Electrical Machine, Marseille, France, 2012: 2462-2468.
[24] Uddin M, Mekhilef S, Nakaoka M, et al. Model predictive control of induction motor with delay time compensation: an experimental assessment[C]//Applied Power Electronics Conference and Exposition, Charlotte, USA, 2015: 543-548.
[25] Lee M, Kong K. Fourier-series-based phase delay compensation of brushless DC motor systems[J]. IEEE Transactions on Power Electronics, 2018, 33(1): 525-534.
[26] Bibian S, Jin H. Time delay compensation of digital control for DC switchmode power supplies using prediction techniques[J]. IEEE Transactions on Power Electronics, 2000, 15(5): 835-842.
[27] Lu Minghui, Wang Xiongfei, Loh P C, et al. Graphical evaluation of time-delay compensation techniques for digitally controlled converters[J]. IEEE Transactions on Power Electronics, 2018, 33(3): 2601-2614.
[28] Yang Dongsheng, Ruan Xinbo, Wu Heng. A real-time computation method with dual sampling mode to improve the current control performance of the LCL- type grid-connected inverter[J]. IEEE Transactions on Industrial Electronics, 2015, 62(7): 4563-4572.
[29] 孙素娟, 翟炜, 瞿兴鸿, 等. 可适应宽频带的抗混叠有源阻尼控制策略[J]. 中国电机工程学报, 2015, 35(20): 5310-5316.
Sun Sujuan, Zhai Wei, Qu Xinghong, et al. Antialiasing active damping control strategy adaptable for wide band[J]. Proceedings of the CSEE, 2015, 35(20): 5310-5316.
国家自然科学基金(5217070613)、江苏省自然科学基金(BK20201297)资助项目。
Stability Analysis and Improvement Design of Current Loop of Ultra-High-Speed Permanent Magnet Motor Drive System
Abstract The delay of the drive system of ultra-high speed permanent magnet motor will seriously affect the stability of the system under the operating condition of ultra-high fundamental frequency. In this paper, the dynamic model of the current loop is accurately reconstructed, and the influence of cross-coupling and delay effect on the system stability is systematically analyzed under high fundamental frequency operating conditions. Accordingly, a damp-integral current loop regulation mechanism is proposed for ultra-high-speed motors based on double sampling current prediction. By compensating the damping ratio of the system, the additional cross-coupling effect is eliminated. In addition, a two-sampling current prediction algorithm with piecewise execution is designed, which can realize the prediction of the next beat feedback current without relying on any parameters and effectively compensate the system stability margin. The above two measures provide a strong guarantee for the global stability of ultra-high fundamental frequency system. Finally, a 550 000r/min/110W ultra-high-speed experimental prototype platform was used to fully simulate and analyze the proposed improved current loop regulation mechanism, which verified the effectiveness and superiority of the proposed scheme.
keywords:Ultra-high-speed motor, stability, control delay, sample delay, damping-ratio, stability margin
DOI: 10.19595/j.cnki.1000-6753.tces.201421
中图分类号:TM351
鲍旭聪 男,1997年生,博士研究生,研究方向为高速电机控制技术、无轴承电机控制技术。E-mail: baoxc@nuaa.edu.com
王晓琳 男,1976年生,教授,研究方向为永磁电机、无轴承电机、高速电机的驱动和控制。E-mail: wangxl@nuaa.edu.cn(通信作者)
收稿日期 2020-10-26
改稿日期 2021-02-16
(编辑 崔文静)