图1 多齿SFPMMM拓扑结构
Fig.1 The multi-tooth SFPMMM topology
摘要 由于多齿开关磁链永磁记忆电机(Multi-tooth SFPMMM)相邻电枢绕组之间互感较大,在设计时如果忽略互感会产生较大的误差。为了提高优化设计精度,该文提出一种考虑相间互感和端部漏磁的等效磁路模型(EMCM)法。建立考虑多齿SFPMMM相邻两相互感的等效磁路模型。最后,用有限元仿真和实验样机分别进行验证,结果表明,与未考虑互感时的EMCM相比,使用所提出的模型,空载反电动势计算精度提高了15.3%。
关键词:多齿开关磁链永磁记忆电机 等效磁路 互感
永磁电机具有较高的效率和转矩密度等特点,至今已得到广泛的研究和应用[1-3]。但传统永磁电机由于永磁体产生的磁场不可调节,在弱磁运行时需要施加较大的d轴电流来削弱气隙磁场,降低了电机的运行效率,增加了永磁体不可逆退磁的风险。为了解决这个问题,国内外学者陆续提出了记忆电机的概念[4-10]。记忆电机采用了具有高剩磁、低矫顽力(Low Coercive Force, LCF)特点的永磁体,可以通过在励磁绕组施加的脉冲电流实现在线调磁,减小了电机的额外损耗,提高了电机的运行效率。
在多齿开关磁链永磁记忆电机(Multi-tooth Switched Flux Permanent Magnet Memory Machine, Multi-tooth SFPMMM)优化设计时,有限元分析(Finite Element Analysis, FEA)计算精度高,但计算量大、耗时长[11]。此外,使用有限元进行记忆电机在线调磁优化仿真时,由于磁性材料属性变换,很难对在线调磁的过程进行计算。因此,在记忆电机初始设计时,需要使用等效磁路模型[12-20](Equivalent Magnetic Circuit Model, EMCM)来对记忆电机的在线调磁过程进行分析。文献[17]对混合磁路可变磁通记忆电机的串联磁路和并联磁路分别进行了建模,研究了该记忆电机的单极漏磁现象。文献[17-19]建立可变磁通记忆电机的等效磁路模型时考虑了磁饱和与永磁体极端漏磁现象,文献[18-19]分别引入了并联漏磁磁阻和开路漏磁系数的方法来解决这个问题。文献[20]针对轴向可变磁通记忆电机提出了一种基于三维网格的等效磁路,在计算非线性问题时采用了牛顿-拉夫逊方法。
但是,以往的文献在建立记忆电机的等效磁路模型时,往往忽略电机各个绕组之间的互感影响[21],导致优化设计时会产生较大的误差。因此本文提出一种考虑相间互感和端部漏磁的等效磁路模型。通过在空载和负载两种情况下的比较,本文提出的改进等效磁路模型在增磁、零磁、弱磁三种不同磁化状态下,反电动势幅值精度都得到了较大的提高。最后,通过有限元和实验样机对所提出的模型精度进行了验证。
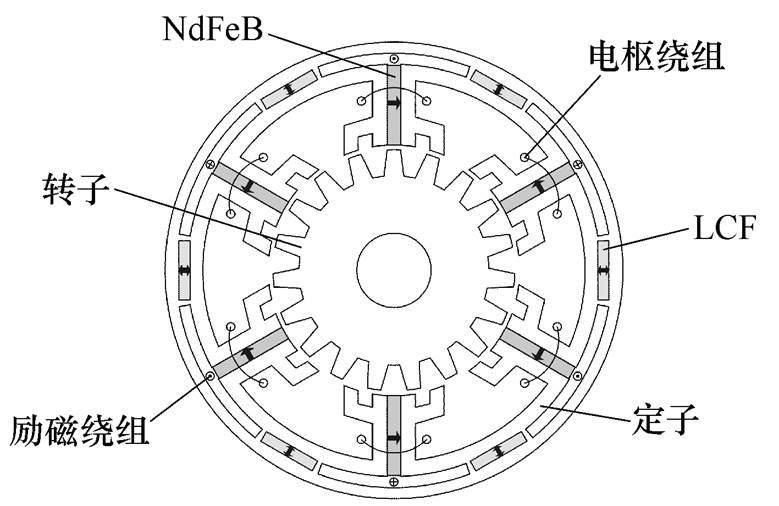
图1为多齿SFPMMM的拓扑结构,该记忆电机采用了定子集中式绕组结构。如图中所示,钕铁硼(NdFeB)永磁体嵌入在定子齿中,LCF永磁体和励磁绕组周向交替分布在定子外磁轭部分。当给励磁绕组施加不同方向和大小的脉冲电流时,LCF永磁体的磁化方向和磁化水平随之改变。
图1 多齿SFPMMM拓扑结构
Fig.1 The multi-tooth SFPMMM topology
图2为多齿SFPMMM在增磁、弱磁情况下的磁场分布。如图2a所示,LCF永磁体产生的磁场与NdFeB产生的磁场叠加,并且均通过气隙闭合,增大了气隙磁场。当LCF永磁体磁化方向如图2b所示时,部分NdFeB产生的磁场穿过LCF永磁体,不通过气隙,从而削弱气隙磁场,实现了弱磁的效果。当LCF永磁体的磁化水平较高,剩磁较大时,多齿SFPMMM的齿部和轭部可能会出现饱和现象。
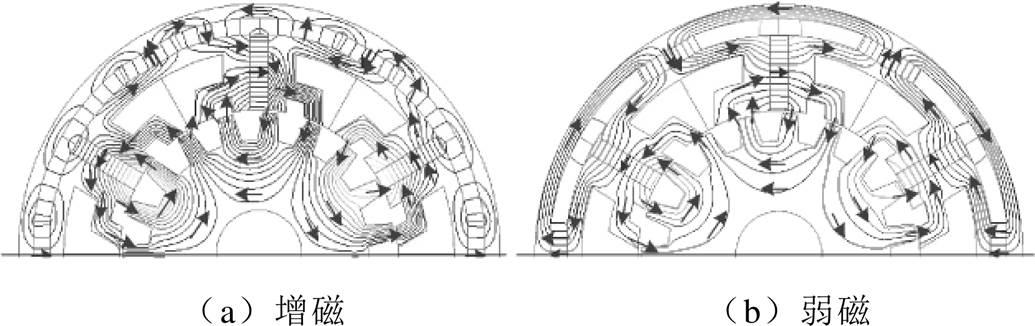
图2 多齿SFPMMM的磁场分布
Fig.2 Flux equipotential distributions of multi-tooth SFPMMM
表1为该多齿SFPMMM的设计参数。表2为多齿SFPMMM电枢绕组在不同磁化状态下的自感和互感。由表2可知,该记忆电机的互感/自感的比值皆近似为50%,在建立相应的等效磁路模型时,需要考虑互感对模型准确度的影响。为了表述方便,在以下出现的图表中,EMCM-Ⅰ代表忽略相邻电枢绕组之间互感影响的等效磁路模型,EMCM-Ⅱ代表考虑绕组之间互感影响的等效磁路模型。
表1 多齿SFPMMM基本参数
Tab.1 Main design parameters of multi-tooth SFPMMM
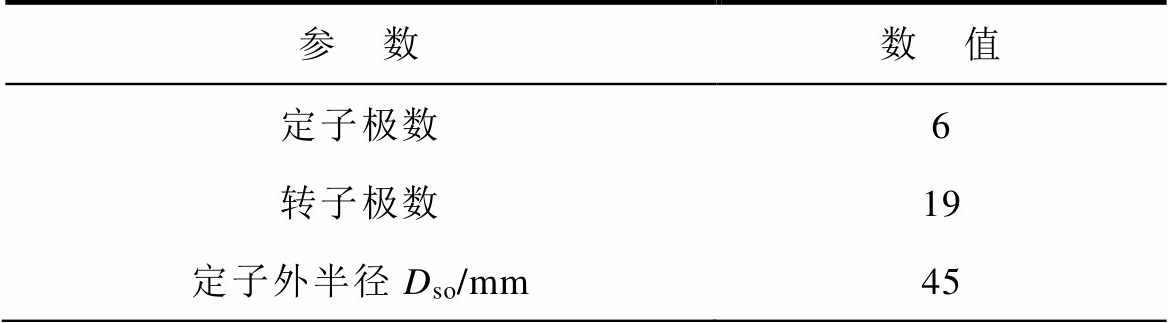
参 数数 值 定子极数6 转子极数19 定子外半径Dso/mm45
(续)

参 数数 值 定子内半径Dr/mm27 电枢绕组匝数36 励磁绕组匝数100 电机轴长Lst/mm25 定子外磁轭厚度Wyoke/mm2.5 气隙宽度g/mm0.5 LCF永磁体厚度hm1/mm2.5 LCF永磁体矫顽力Hc1/(kA/m)140 LCF永磁体剩磁Br1/T0.72 NdFeB厚度hm2/mm3.6 NdFeB矫顽力Hc2/(kA/m)910 NdFeB剩磁Br2/T1.2
表2 不同磁化状态下的电枢绕组自感和互感
Tab.2 The self-inductance and mutual-inductance of armature windings at different magnetization states
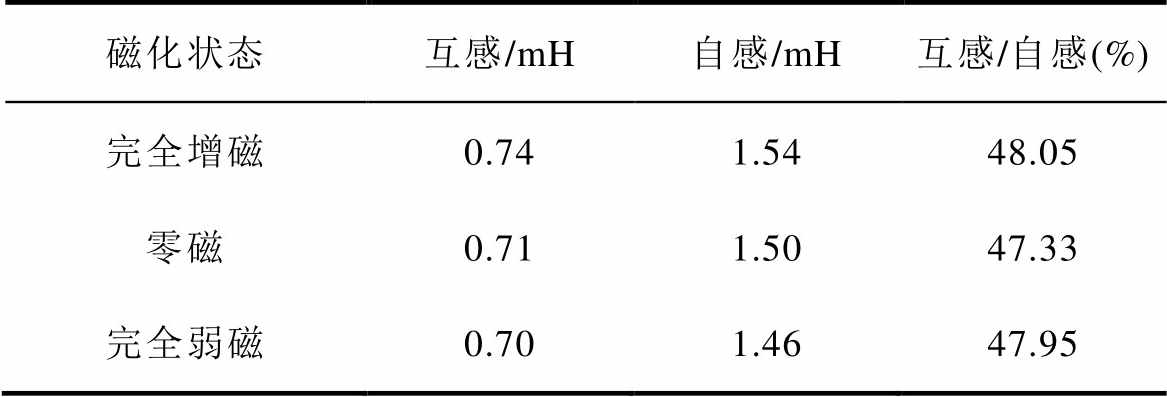
磁化状态互感/mH自感/mH互感/自感(%) 完全增磁0.741.5448.05 零磁0.711.5047.33 完全弱磁0.701.4647.95
多齿SFPMMM的基本工作原理与开关磁链永磁电机相同,其磁链基波的波形接近正弦,求得该电机电枢绕组磁链最大值,即可构造磁链波形,进而推算空载反电动势(back Electromotive Force, back-EMF)[22-23]。当该电机转子处于A相磁链最大位置时,可以构建相应的静态等效磁路模型。
图3、图4分别为不考虑多齿SFPMMM相邻电枢绕组之间互感影响的简化磁路和等效磁路模型,即EMCM-Ⅰ。在这种情况下,排除了相邻B、C两相的作用,只考虑A相LCF永磁体和NdFeB产生的磁场。图3中,fNdFeB、fLCF分别为NdFeB和LCF永磁体产生的磁场路径, 为气隙漏磁。如图3b所示,在弱磁状态下,相邻两个LCF永磁体产生的磁场在多齿SFPMMM定子轭部发生了自闭合,削弱了气隙磁场。图4构造的磁路模型考虑了永磁体的极端漏磁现象,为表示该漏磁在永磁体磁阻两端并联一个等效磁阻[18-19]。
为气隙漏磁。如图3b所示,在弱磁状态下,相邻两个LCF永磁体产生的磁场在多齿SFPMMM定子轭部发生了自闭合,削弱了气隙磁场。图4构造的磁路模型考虑了永磁体的极端漏磁现象,为表示该漏磁在永磁体磁阻两端并联一个等效磁阻[18-19]。
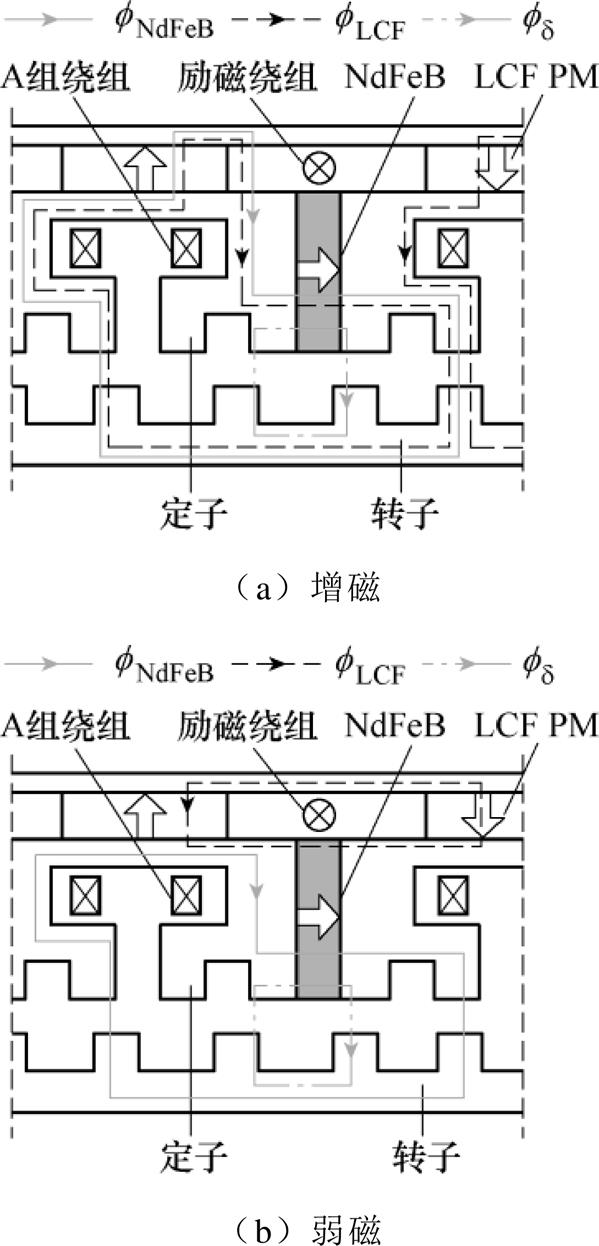
图3 多齿SFPMMM不考虑电枢绕组互感下的简化磁路
Fig.3 Flux path in multi-tooth SFPMMM without considering the armature winding mutual effect
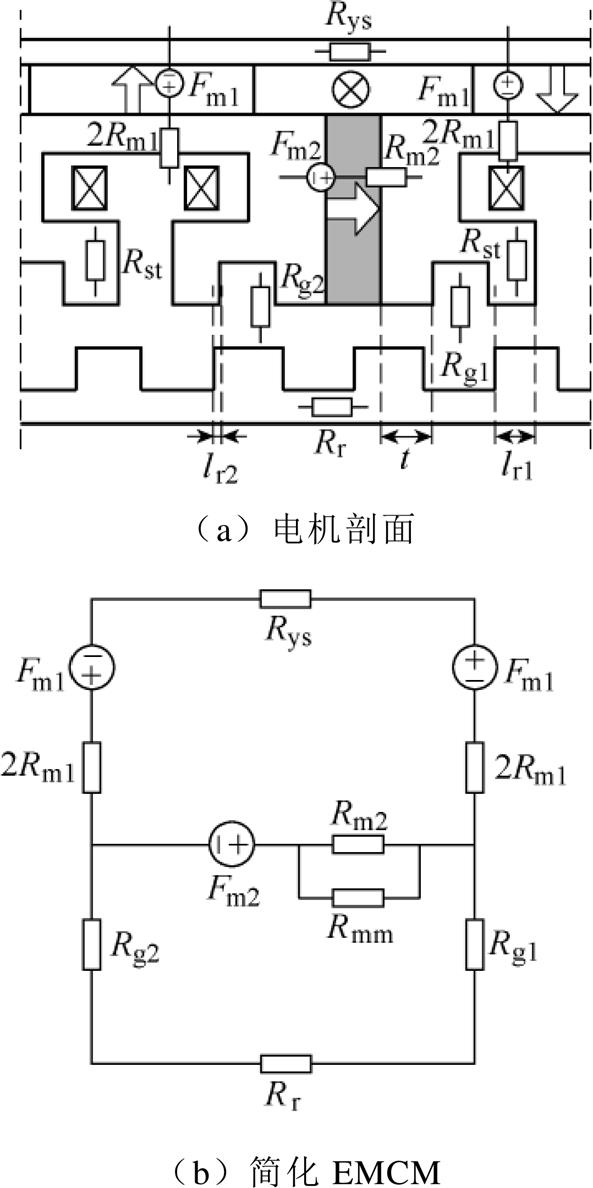
图4 多齿SFPMMM在不考虑电枢绕组互感下的EMCM
Fig.4 Simplified EMCM in multi-tooth SFPMMM without considering the armature winding mutual effect
图4中,Fm1和Fm2分别为LCF永磁体和NdFeB的磁动势;Rm1、Rm2、Rys分别为LCF永磁体、NdFeB和多齿SFPMMM定子磁轭部分的磁阻;Rg1和Rg2为气隙等效磁阻;Rst、Rr分别为定子、转子硅钢片等效磁阻;Rmm为NdFeB永磁体的极端漏磁等效磁阻;lr1和lr2为定、转子齿相对的宽度;t为定子小齿的宽度。
磁路中部分磁阻和磁动势计算公式为
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
 (7)
(7)
式中, 为真空磁导率;
为真空磁导率; 、
、 、
、 分别为LCF永磁体、NdFeB和硅钢片的相对磁导率;Lm1和Lm2分别为LCF永磁体和NdFeB的长度;Ns为定子齿数。
分别为LCF永磁体、NdFeB和硅钢片的相对磁导率;Lm1和Lm2分别为LCF永磁体和NdFeB的长度;Ns为定子齿数。
通过磁路计算,可以得到EMCM-Ⅰ的气隙磁链 和漏磁支路上的磁链
和漏磁支路上的磁链 的表达式分别为
的表达式分别为
 (8)
(8)
 (9)
(9)
定义漏磁系数 =Rm2/Rmm,可表示为
=Rm2/Rmm,可表示为
 (10)
(10)
 (11)
(11)
式中,Ai为A相NdFeB两端的定子小齿横截面积;Bmm为定子小齿的磁通密度。
随着磁路饱和程度的增加,假设NdFeB两端小齿饱和,通过限定Bmm的大小可以得出漏磁系数,从而确定NdFeB的等效磁阻。
由于多齿SFPMMM的转子磁阻远远小于气隙磁阻,在实际计算过程中可以忽略。在弱磁状态下,LCF永磁体产生的磁场在该电机的定子轭部发生了自闭合,当LCF永磁体的磁化水平较高时,此处的磁场密度将明显增大,可能会出现局部磁饱和现象。定子轭部的磁链和磁通密度表达式分别为
 (12)
(12)
 (13)
(13)
式中, 、Bys、hys分别为多齿SFPMMM定子轭部的磁链、磁通密度和厚度。
、Bys、hys分别为多齿SFPMMM定子轭部的磁链、磁通密度和厚度。
图5、图6分别是考虑多齿SFPMMM相邻电枢绕组之间互感影响的简化磁路和等效磁路模型,即EMCM-Ⅱ。在该EMCM中,A、B、C三相永磁体共同作用产生磁场且假设三相的磁链特性一致。
EMCM-Ⅱ的磁路复杂程度高,可以通过矩阵形式的节点电压方程得到对应的气隙磁链表达式,有
 (14)
(14)
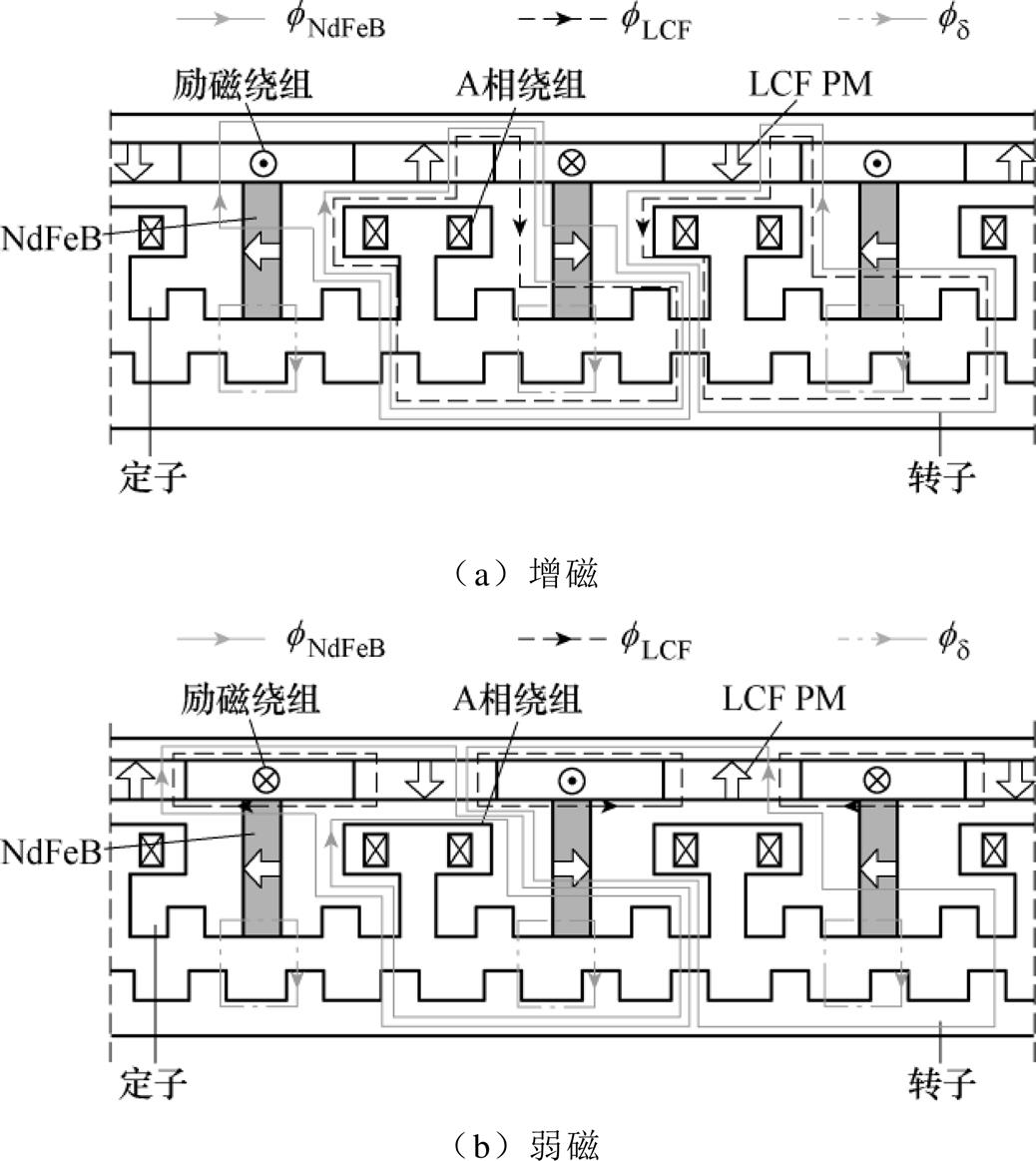
图5 多齿SFPMMM在考虑电枢绕组互感下的简化磁路
Fig.5 Flux path in multi-tooth SFPMMM with considering the armature winding mutual effect
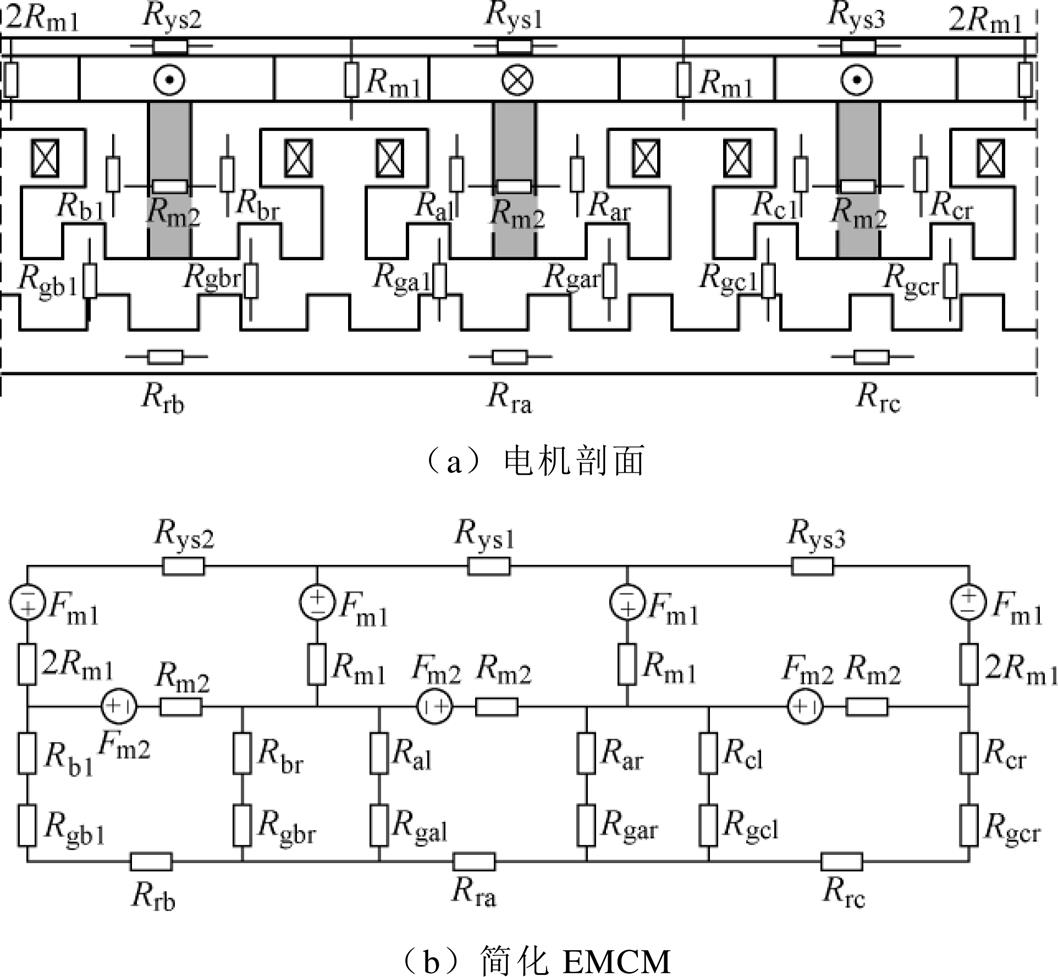
图6 多齿SFPMMM在考虑电枢绕组互感下的EMCM
Fig.6 Simplified EMCM in multi-tooth SFPMMM with considering the armature winding mutual effect
式中, 为支路磁链的幅值矩阵;
为支路磁链的幅值矩阵; 为节点导纳矩阵的逆矩阵;A为关联矩阵;Y为支路导纳矩阵;Fs为支路磁动势源矩阵;Rn为磁阻矩阵。
为节点导纳矩阵的逆矩阵;A为关联矩阵;Y为支路导纳矩阵;Fs为支路磁动势源矩阵;Rn为磁阻矩阵。
多齿SFPMMM的互感包括相邻电枢绕组之间的互感以及电枢绕组和励磁绕组之间的互感。在EMCM-Ⅱ中,该电机定子轭部和定转子齿尖等部位的磁阻会随着磁路的数量和饱和程度增加而增加。且脉冲电流一般大于电枢电流,施加脉冲电流的瞬间,脉冲磁动势会导致电机更易出现饱和。计及硅钢片非线性时相磁链幅值计算如图7所示。根据图7的计算流程,磁路中磁阻和磁通密度不断循环迭代,最终确定磁链和反电动势。
空载反电动势为
 (15)
(15)
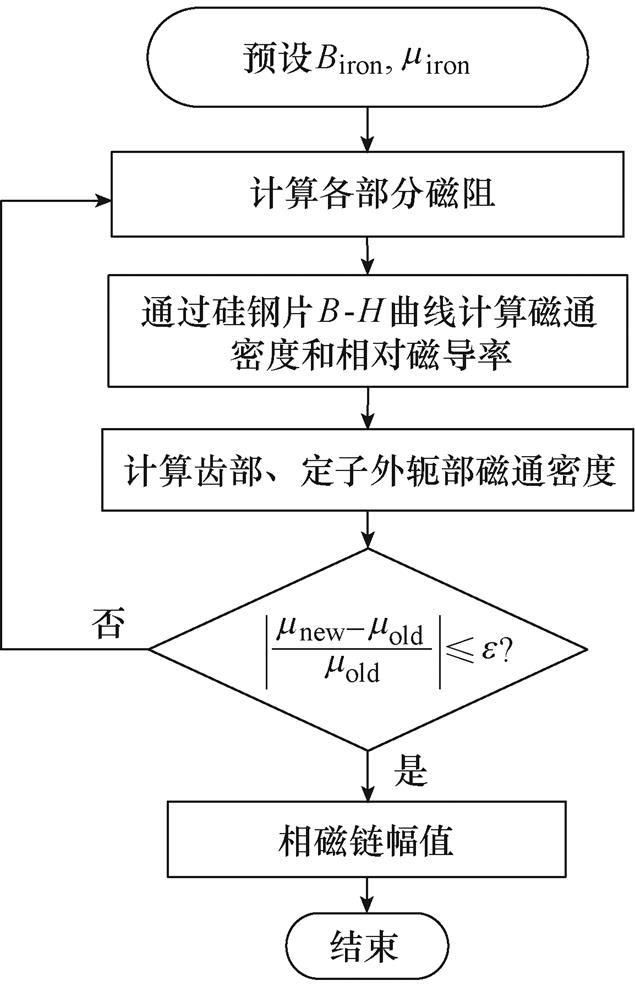
图7 计及硅钢片非线性时相磁链幅值计算
Fig.7 Flowchart for calculation of flux-linkage amplitude considering nonlinearity
式中,Em为空载反电动势幅值; 为相磁链幅值;
为相磁链幅值; 为电角度;
为电角度; 为转子角速度;Nr为转子齿数;n为转速。
为转子角速度;Nr为转子齿数;n为转速。
由于该记忆电机的互感/自感的比值皆近似为50%,为了分析相间互感对模型精度的影响,基于建立的两种EMCM,计算得到不同磁化状态下两种模型的相磁链幅值和空载反电动势幅值。表3、表4分别是两种EMCM在完全增磁、零磁、完全弱磁情况下的相磁链幅值和空载反电动势幅值的比较结果。
表3 不同磁化状态下的相磁链幅值
Tab.3 Flux-linkage amplitude at different magnetization states (单位: mWb)

磁化状态EMCM-ⅠEMCM-Ⅱ差值 完全增磁5.516.94-1.43 零磁4.325.69-1.37 完全弱磁3.374.35-0.98
表4 不同磁化状态下的空载反电动势幅值
Tab.4 Open-circuit back-EMF amplitude at different magnetization states (单位: V)
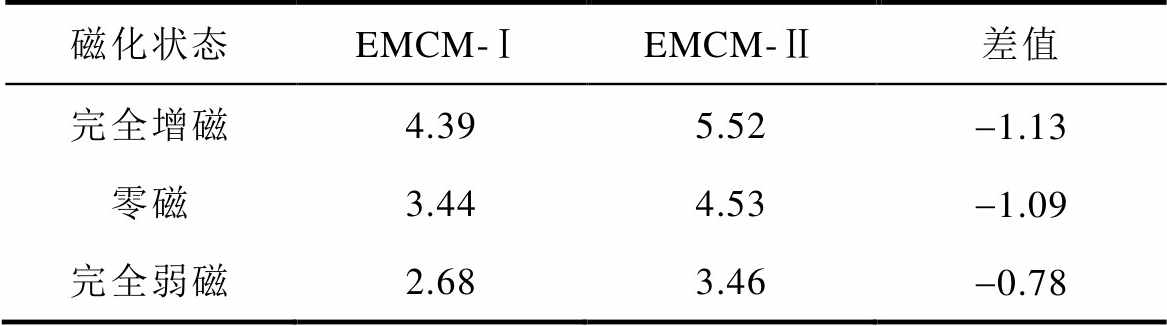
磁化状态EMCM-ⅠEMCM-Ⅱ差值 完全增磁4.395.52-1.13 零磁3.444.53-1.09 完全弱磁2.683.46-0.78
如表3、表4所示,在增磁、零磁和弱磁三种磁化状态下,EMCM-Ⅰ和EMCM-Ⅱ的相磁链幅值的差值分别为-1.43mWb、-1.37mWb和-0.98mWb;EMCM-Ⅰ和EMCM-Ⅱ的空载反电动势幅值的差值分别为-1.13V、-1.09V和-0.78V。
为了比较EMCM-Ⅰ和EMCM-Ⅱ的准确度,从空载和负载两种情况用有限元仿真结果进行了验证,结果见表5、表6。空载时,多齿SFPMMM在增磁、零磁和弱磁三种磁化状态下,EMCM-Ⅰ的相磁链幅值分别比仿真结果小12.7%、27.4%和28.0%,反电动势幅值比仿真结果小12.7%、29.2%和26.4%。EMCM-Ⅱ的相磁链幅值误差为9.9%、-4.4%和-7.1%,反电动势幅值的误差为9.7%、-6.8%和-4.9%。
表5 不同磁化状态下的相磁链幅值对比
Tab.5 Comparison of flux-linkage at different magnetization states
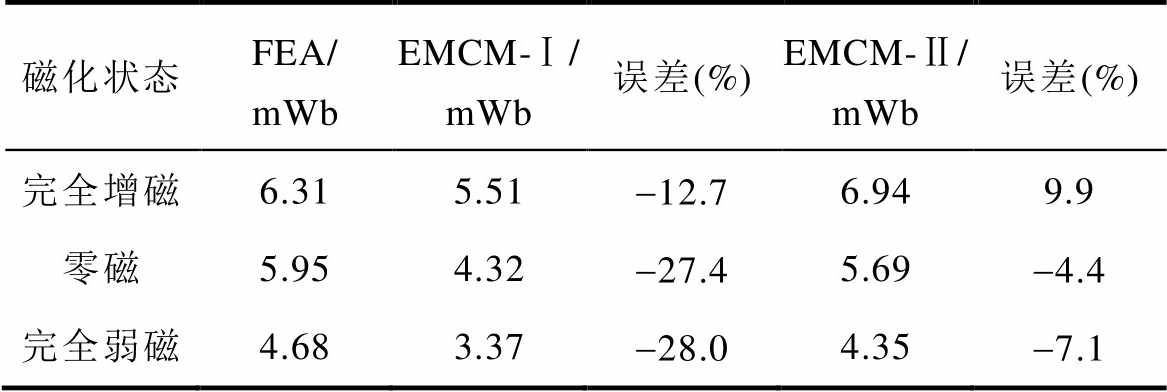
磁化状态FEA/ mWbEMCM-Ⅰ/ mWb误差(%)EMCM-Ⅱ/ mWb误差(%) 完全增磁6.315.51-12.76.949.9 零磁5.954.32-27.45.69-4.4 完全弱磁4.683.37-28.04.35-7.1
表6 不同磁化状态下的空载反电动势幅值对比
Tab.6 Comparison of open-circuit back-EMF at different magnetization states

磁化状态FEA/VEMCM-Ⅰ/V误差(%)EMCM-Ⅱ/V误差(%) 完全增磁5.034.39-12.75.529.7 零磁4.863.44-29.24.53-6.8 完全弱磁3.642.68-26.43.46-4.9
文献[18]提出的分段线性磁滞模型,如图8所示,LCF永磁体的工作点通过施加的脉冲电流在不同的增磁回线和退磁回线之间重复变化。当电机在负载运行时,负载线的斜率小于空载线,此时的LCF永磁体更易发生去磁。这是因为在电机定子铁心饱和程度增加时,NdFeB永磁体和电枢反应磁场的磁路更易经过LCF永磁体,使其去磁。交轴电枢磁动势与主磁场正交,对于LCF永磁体的磁化水平影响可以忽略不计,直轴电枢磁动势与主磁场方向相同,对LCF永磁体的磁化水平有直接影响。
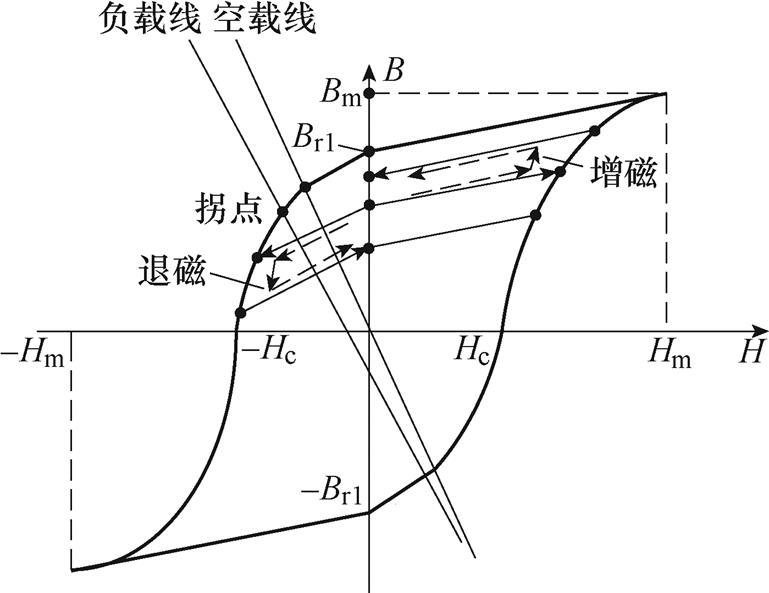
图8 分段线性磁滞模型
Fig.8 Piecewise linear hysteresis model
表7和表8分别为在d、q轴电流作用下施加脉冲电流调磁后计算得到的空载反电动势,以此来间接比较EMCM-Ⅰ和EMCM-Ⅱ的精度。当id=0,iq=4A时,与有限元仿真结果对比,EMCM-Ⅰ的空载反电动势幅值在完全增磁和完全弱磁的状态下分别比FEA结果小12.7%和24.5%,EMCM-Ⅱ有限元的误差分别为7.8%和-4.7%。当id=-4A,iq=0时,在完全增磁状态下,EMCM-Ⅰ的空载反电动势幅值比有限元结果小12.7%,EMMC-Ⅱ比有限元结果大9.3%;在完全弱磁状态下,EMCM-Ⅰ的空载反电动势幅值比有限元结果小26.6%,而EMCM-Ⅱ比有限元结果小7.4%。
表7 id=0, iq=4A时空载反电动势幅值对比
Tab.7 Comparison of open-circuit back-EMF with id=0, iq=4A
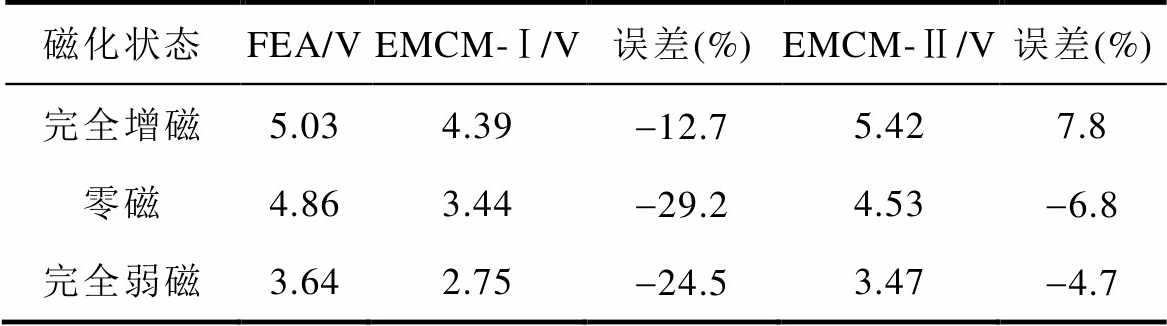
磁化状态FEA/VEMCM-Ⅰ/V误差(%)EMCM-Ⅱ/V误差(%) 完全增磁5.034.39-12.75.427.8 零磁4.863.44-29.24.53-6.8 完全弱磁3.642.75-24.53.47-4.7
表8 id=-4A, iq=0时空载反电动势幅值对比
Tab.8 Comparison of open-circuit back-EMF with id=-4A, iq=0
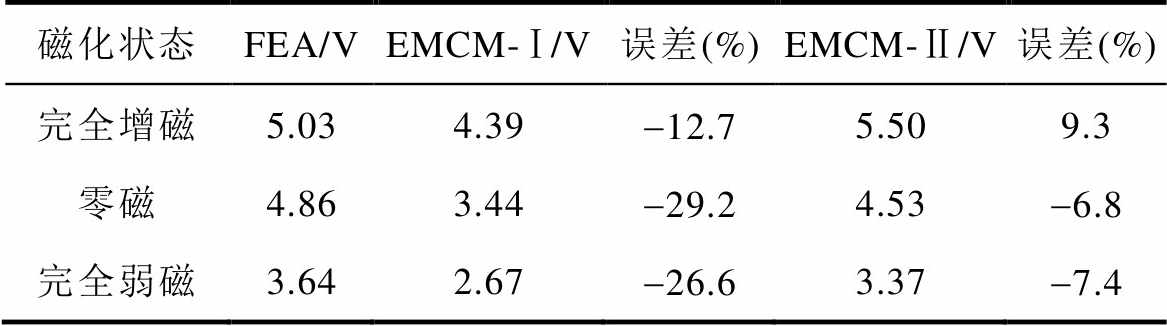
磁化状态FEA/VEMCM-Ⅰ/V误差(%)EMCM-Ⅱ/V误差(%) 完全增磁5.034.39-12.75.509.3 零磁4.863.44-29.24.53-6.8 完全弱磁3.642.67-26.63.37-7.4
比较结果表明,在空载和负载状态下,EMCM-Ⅰ的精度较差,特别是在零磁状态和完全弱磁状态下,EMCM-Ⅱ在三种磁化状态下的误差都在10%以内,这说明考虑多齿SFPMMM相邻电枢绕组之间互感影响的等效磁路模型精度更高。
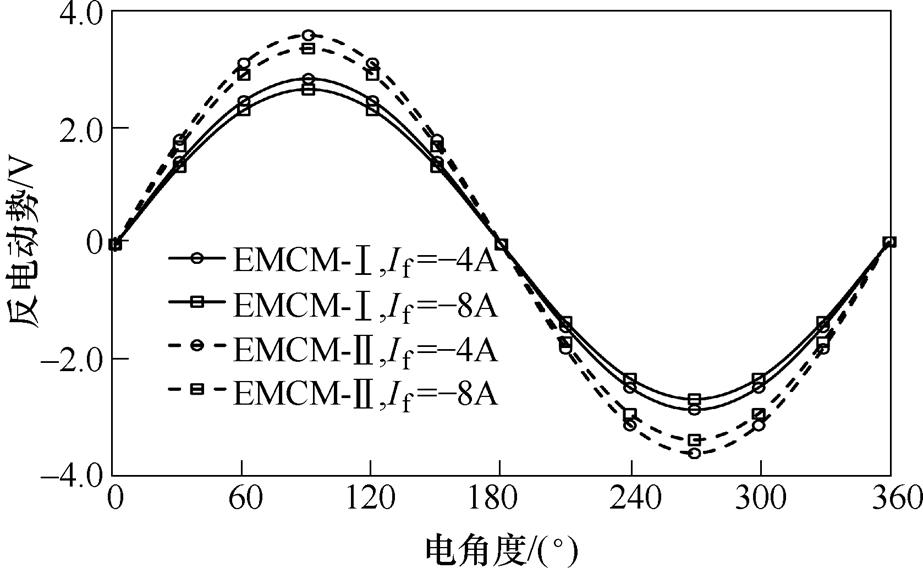
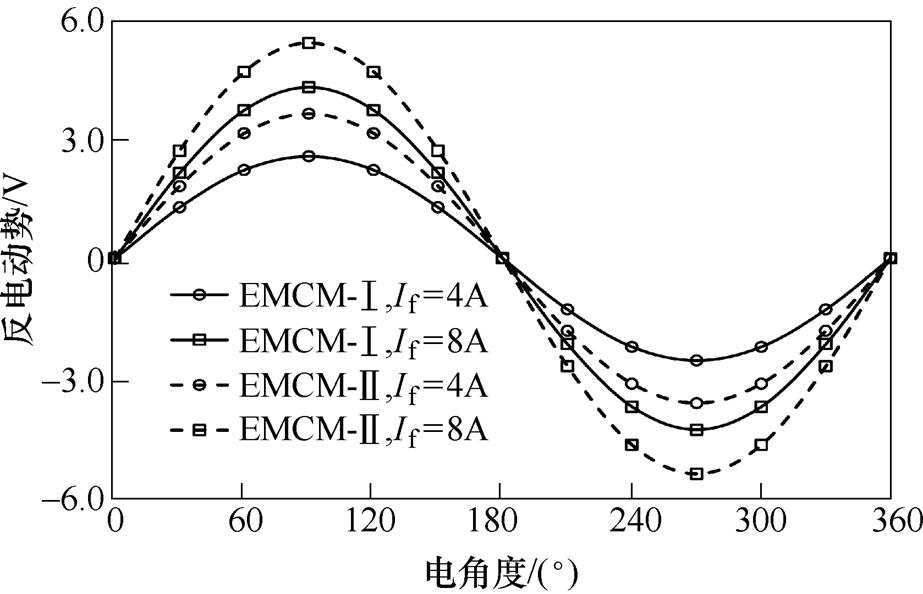
为了更深入地比较两种等效磁路模型在多齿SFPMMM在线调磁过程中的精度,计算了在励磁绕组中施加不同大小和方向的脉冲电流时的空载反电动势,脉冲电流幅值用If表示。图9为多齿SFPMMM在完全增磁状态下施加负向脉冲电流时的空载反电动势波形,图10则为多齿SFPMMM在完全弱磁状态下施加正向脉冲电流时的空载反电动势波形变化。
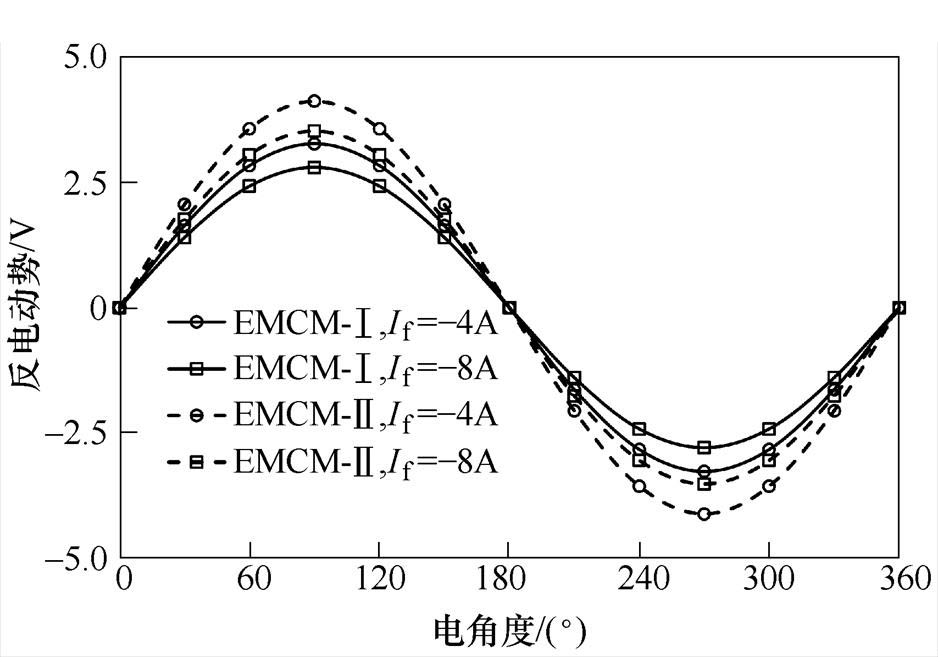
图9 在负向脉冲电流下的反电动势波形
Fig.9 Back-EMF waveforms with negative current pulse
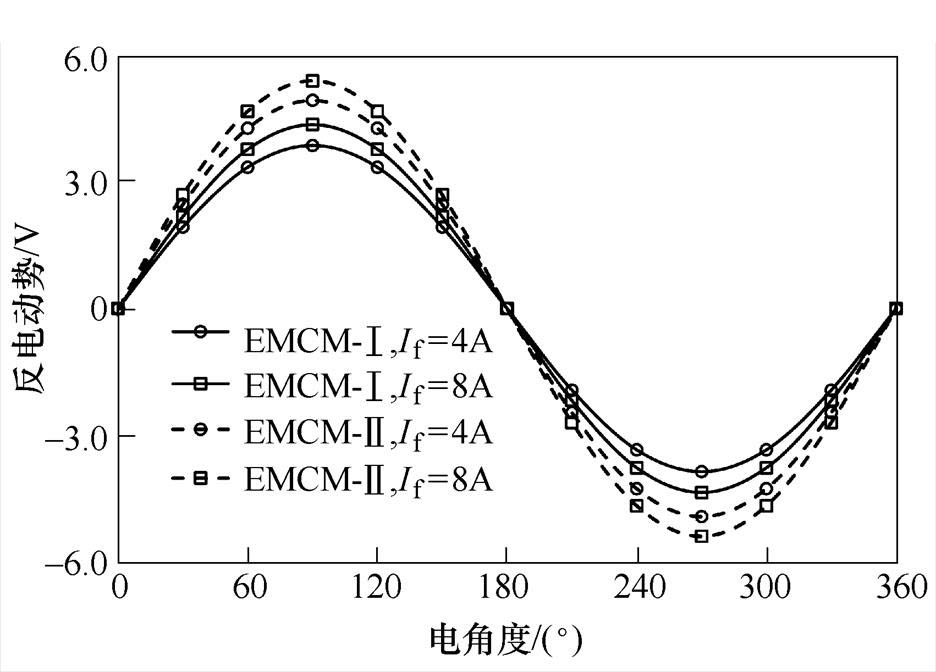
图10 在正向脉冲电流下的反电动势波形
Fig.10 Back-EMF waveforms with positive pulse current
如图9所示,当在多齿SFPMMM励磁绕组中施加逐渐增大的负向脉冲电流时,EMCM-Ⅰ和EMCM-Ⅱ的空载反电动势幅值不断减小,且在相同大小的脉冲电流下,EMCM-Ⅱ的空载反电动势幅值皆大于EMCM-Ⅰ的计算值。当施加的负向脉冲电流相对较大时,EMCM-Ⅰ的空载反电动势幅值稳定在2~3V之间,EMCM-Ⅱ的幅值稳定在3~4V之间,EMCM-Ⅱ的计算结果与有限元的仿真结果差别较小,即3.64V。
同理,图10表明,当在多齿SFPMMM励磁绕组中施加逐渐增大的正向脉冲电流时,EMCM-Ⅰ和EMCM-Ⅱ的空载反电动势幅值不断增大,当脉冲电流较大时,EMCM-Ⅰ的空载反电动势幅值稳定在4~4.5V之间,EMCM-Ⅱ的幅值稳定在5~6V之间,EMCM-Ⅱ的计算结果更接近有限元的仿真结果,即5.03V。
在空载情况下,通过与有限元结果对比,间接表明考虑相间互感的等效磁路模型在多齿SFPMMM在线去磁/充磁时精度更高。
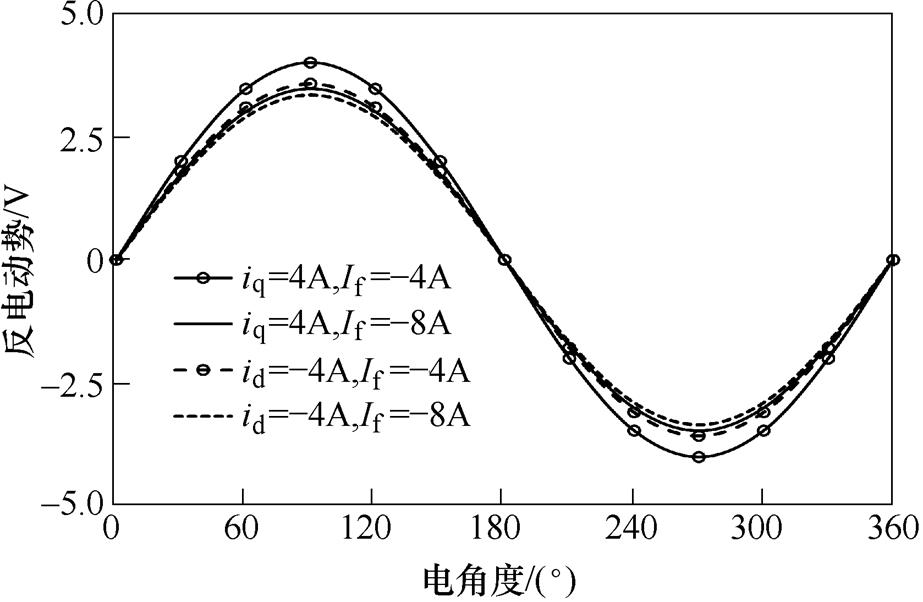
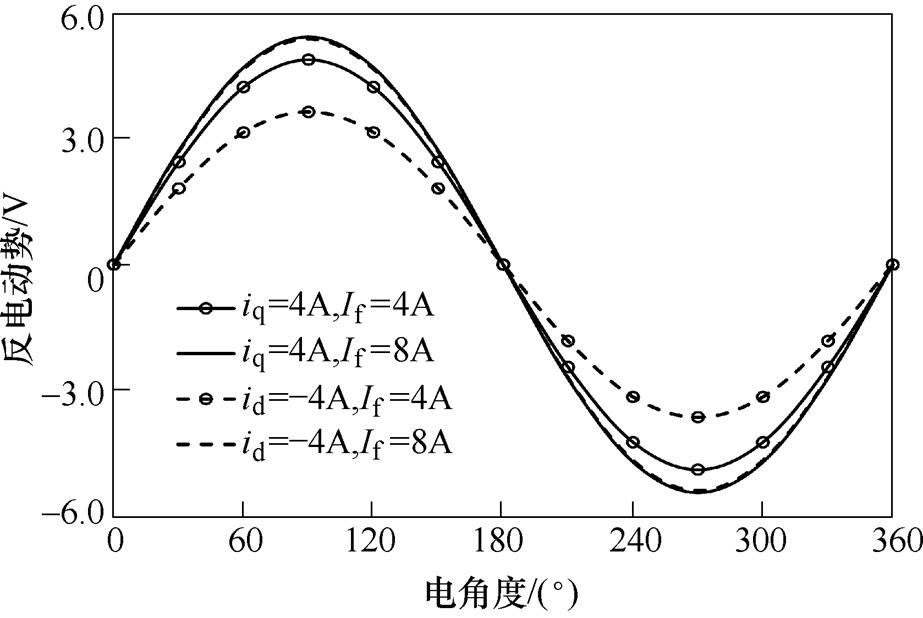
在负载情况下,由于多齿SFPMMM电枢电流的存在,LCF永磁体的磁化水平不仅由励磁绕组中施加的脉冲电流决定,同时还会受电枢电流的影响。因此,在探究负载情况下多齿SFPMMM的在线调磁特性时,需要同时考虑电枢绕组与励磁绕组之间互感的影响。为了进一步验证考虑相间互感影响的等效磁路模型在多齿SFPMMM负载情况下的精度,在该电机电枢绕组中注入d、q轴电流的同时施加不同大小和方向的脉冲电流,再计算得到空载反电动势以间接比较两种等效磁路模型的精度。图11、图12分别为在iq=4A或者id=-4A时多齿SFPMMM反电动势波形。如图11、图12所示,在多齿SFPMMM的增磁和去磁过程中同时注入d轴或q轴电流,EMCM-Ⅱ得到的反电动势幅值皆比EMCM-Ⅰ的计算值大,这与空载情况下的分析结果一致。
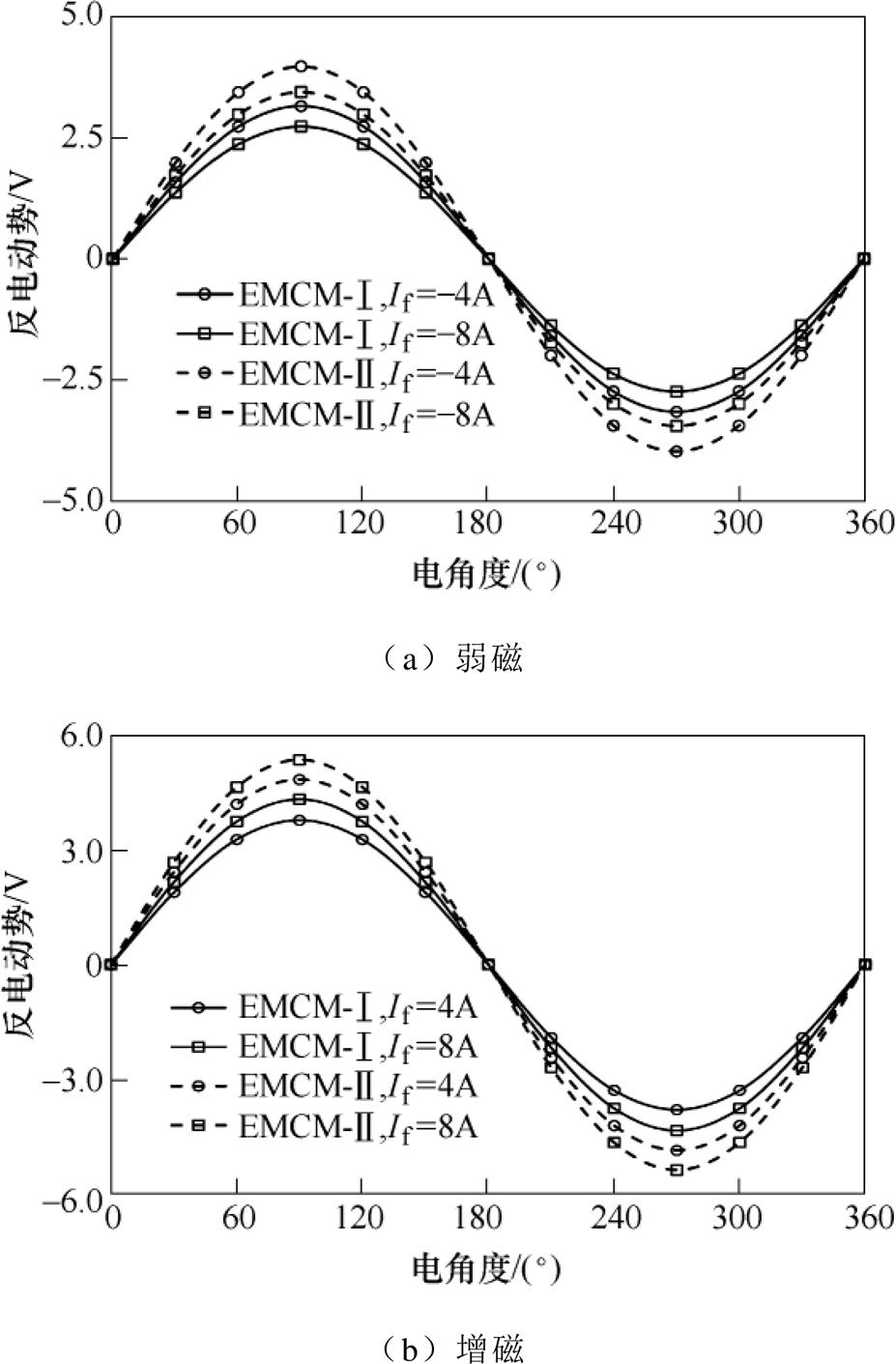
图11 id=0, iq=4A时反电动势波形
Fig.11 The waveforms of back-EMF with id=0, iq=4A
(a)弱磁
(b)增磁
图12 id=-4A, iq=0时反电动势波形
Fig.12 The waveforms of back-EMF with id=-4A, iq=0
id、iq作用下的波形对比如图13所示。图中表明,当id=-4A时,在多齿SFPMMM在线充磁和去磁的过程中,在相同大小的脉冲电流下,多齿SFPMMM的反电动势幅值比iq=4A时的计算值小。这主要是因为q轴电流产生的磁场垂直于脉冲电流产生的磁场,对LCF永磁体的磁化水平影响不大。而d轴电流产生的磁场穿过LCF永磁体,直接影响了LCF永磁体的磁化水平。
为了验证考虑多齿SFPMMM相间互感的等效磁路模型的精度,制作了实验样机并在转速为400r/min下进行了实验。图14为多齿SFPMMM样机。
(a)弱磁
(b)增磁
图13 id、iq作用下的波形对比
Fig.13 Comparison of waveforms with the action of id, iq
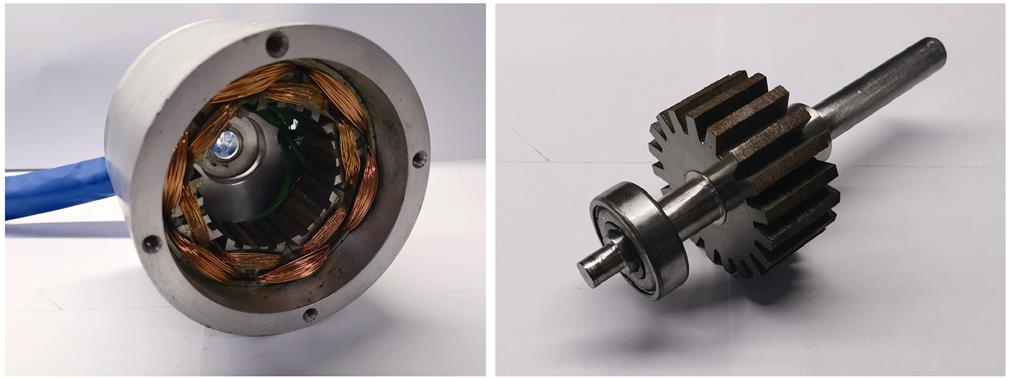
(a)定子 (a)转子
图14 多齿SFPMMM样机
Fig.14 Multi-tooth SFPMMM prototype
图15为在空载情况下,EMCM-Ⅰ、EMCM-Ⅱ计算值构造的空载反电动势波形和实验测量波形对比。在图15中,当脉冲电流为-8A时,EMCM-Ⅰ和EMCM-Ⅱ的反电动势幅值分别为2.79V和3.51V,实验测量值为3.41V,EMCM-Ⅱ的计算精度比EMCM-Ⅰ提高了15.3%,说明EMCM-Ⅱ的模型准确度更高。
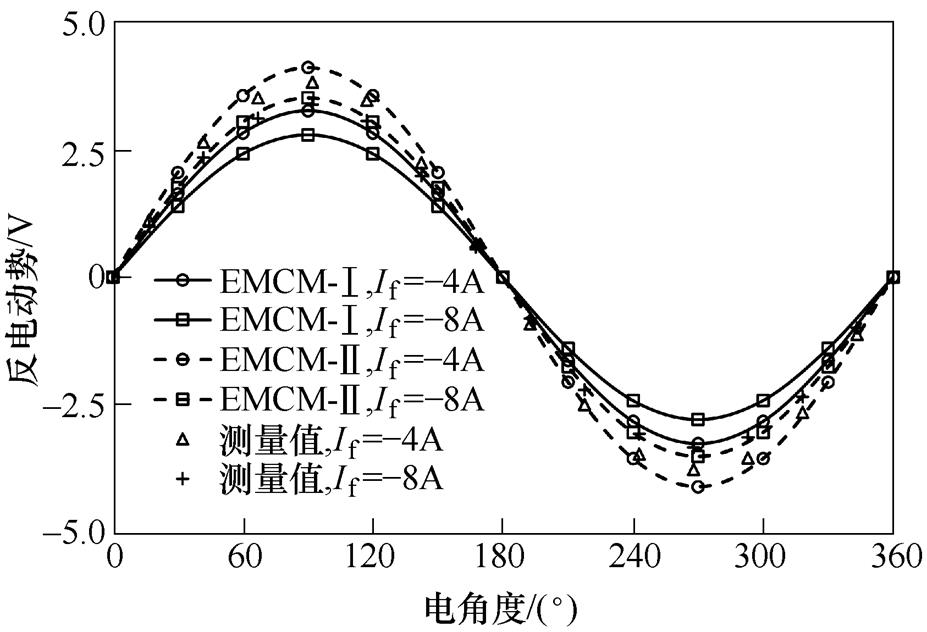
图15 反电动势波形的对比
Fig.15 Comparison of calculated and measured back-EMF waveforms
图16为在id、iq作用下且脉冲电流If =-4A时,EMCM-Ⅱ的反电动势计算幅值构造的波形和实验测量波形对比。在id=0或者iq=0的情况下,EMCM-Ⅱ构造的反电动势波形皆比EMCM-Ⅰ的更接近于实验波形。此外,当id=0,iq=4A时,EMCM-Ⅱ和实验的反电动势波形在q轴电流作用下与空载条件下基本相同;当iq=0,id=-4A时,EMCM-Ⅱ和实验的反电动势波形幅值比空载条件下偏小。图16进一步验证了考虑相邻电枢绕组之间互感影响的等效磁路模型准确度更高,且d轴电流比q轴电流在多齿SFPMMM的在线去磁过程中影响更明显。
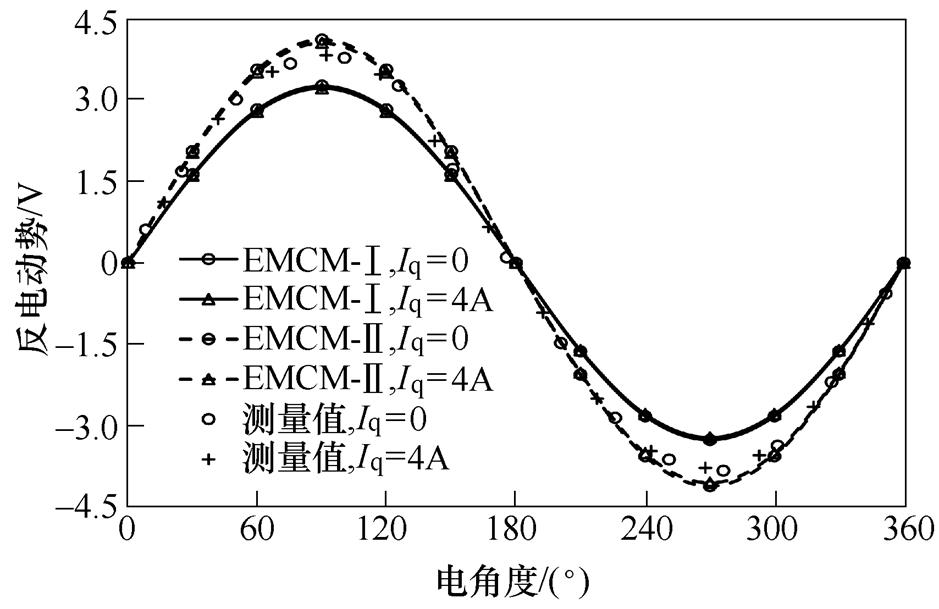
(a)id=0
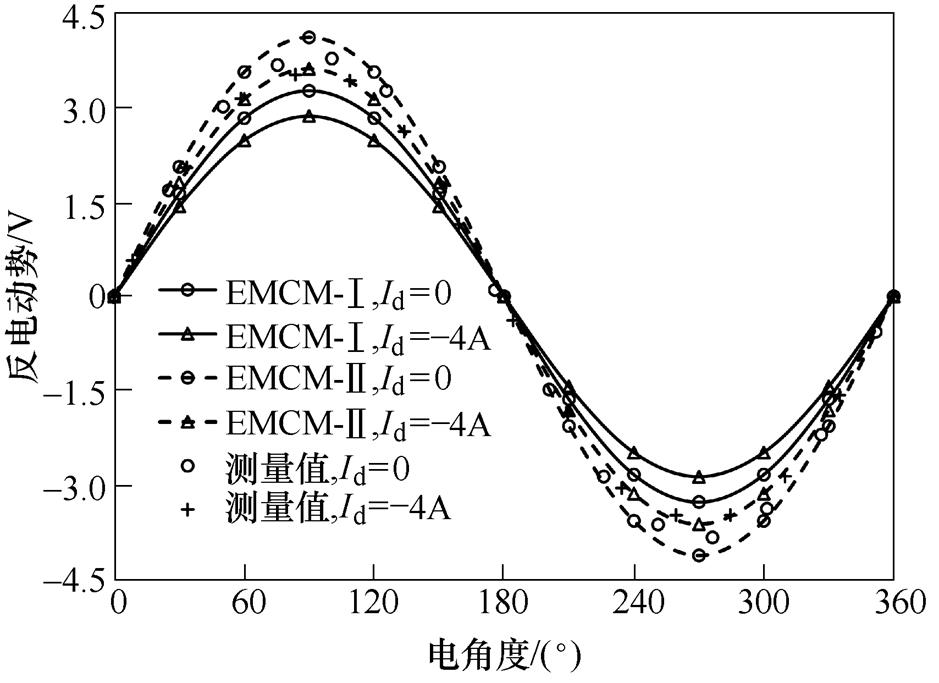
(b)iq=0
图16 基于EMCM-Ⅱ和实验的反电动势波形对比
Fig.16 Comparison of back-EMF waveforms based on EMCM-Ⅱ and experiment
为了测量样机在不同磁化状态下的静态转矩,搭建了图17所提供的静态转矩测量平台。如图中所示,该平台由分度盘、电子秤、载重、水平仪和平衡杆组成。首先在样机A相注入一个直流电,使样机的A相与d轴位置重合,将平衡杆调至水平,电子秤置零。将样机的B相、C相绕组并联后再与A相绕组串联,用DC直流电源在A相绕组中注入逐渐增大的电流,记录不同电流下电子秤读数,可以得到静态转矩值。当用脉冲电流改变多齿SFPMMM的LCF永磁体的磁化方向时,可以得到样机在增磁、零磁、弱磁三种磁化状态下的静态转矩实验结果,如图18所示。
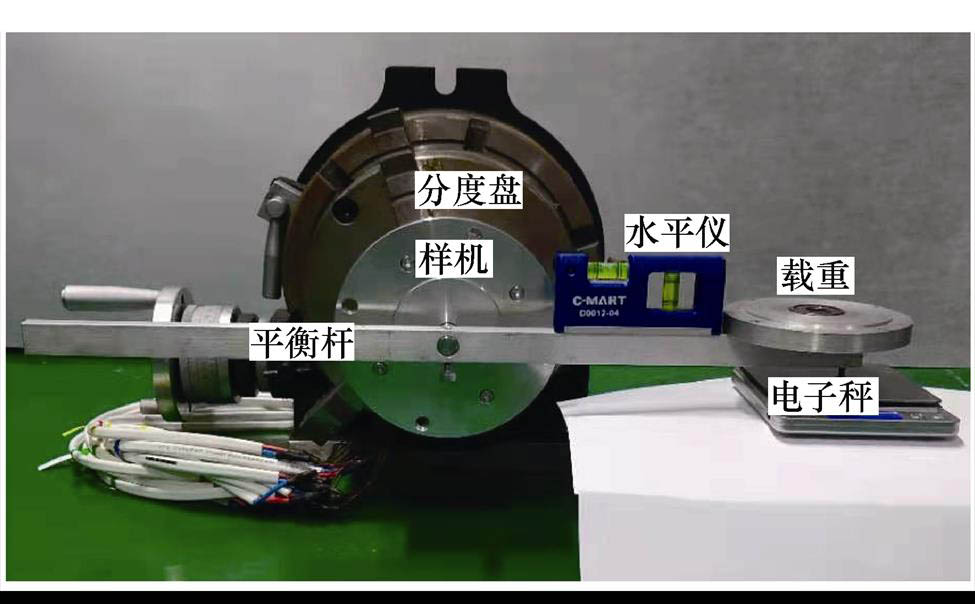
图17 静态转矩测量平台
Fig.17 Static torque test platform
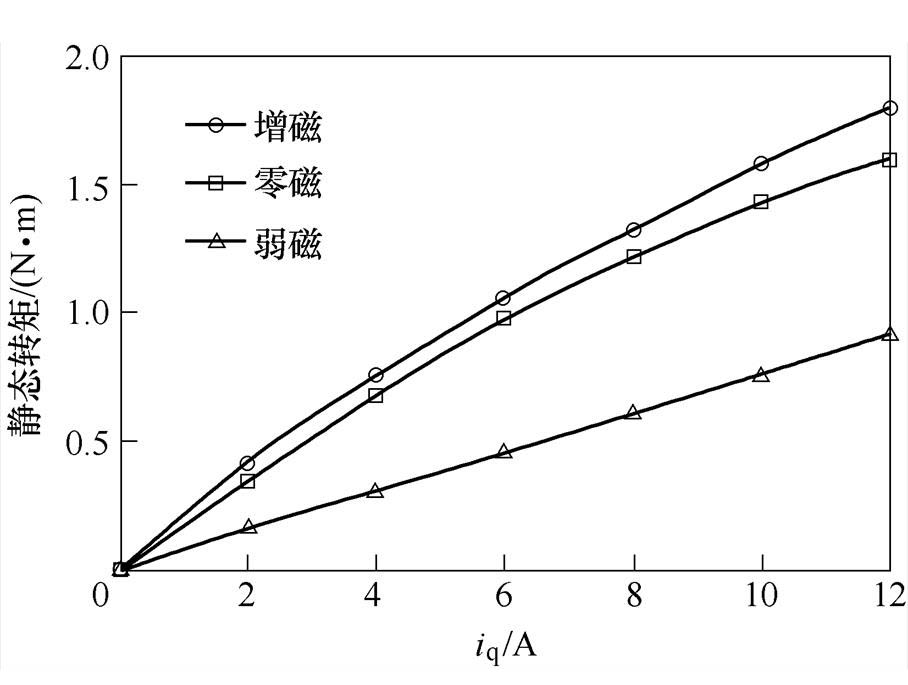
图18 静态转矩实验结果
Fig.18 Static torque experimental results of SFPMMM
由于多齿开关磁链永磁记忆电机相邻电枢绕组、电枢与励磁绕组之间存在互感,在计算在线调磁的励磁电流大小时,忽略互感会产生较大的误差,从而导致电机初始设计存在较大的误差。因此,本文提出了一种考虑相间互感的精确多齿开关磁链永磁记忆电机模型。通过与实验样机的测试对比表明,与未考虑互感时的EMCM相比,使用所提出的模型,空载反电动势计算精度提高了15.3%。因而,通过该模型不仅可以实现多齿开关磁链永磁记忆电机较精确的快速初始设计,而且还可以用来计算多齿开关磁链永磁记忆电机在线调磁时的励磁电流。
参考文献
[1] 刘细平, 胡卫平, 丁卫中, 等. 永磁同步电机多参数辨识方法研究[J]. 电工技术学报, 2020, 35(6): 1198-1207.
Liu Xiping, Hu Weiping, Ding Weizhong, et al. Research on multi-parameter identification method of permanent magnet synchronous motor[J]. Transa- ctions of China Electrotechnical Society, 2020, 35(6): 1198-1207.
[2] Zhang Xu, Zhang Wei, Liang Xingyan, et al. Per- formance analysis and comparison for two topologies of flux-switching permanent magnet machine[J]. China Electrotechnical Society Transactions on Elec- trical Machines and Systems, 2020, 4(3): 190-197.
[3] Li Wei, Cheng Ming. Investigation of influence of winding structure on reliability of permanent magnet machines[J]. China Electrotechnical Society Transa- ctions on Electrical Machines and Systems, 2020, 4(2): 87-95.
[4] 高峰阳, 齐晓东, 李晓峰, 等. 部分分段Halbach永磁同步电机优化设计[J]. 电工技术学报, 2021, 35(4): 787-800.
Gao Fengyang, Qi Xiaodong, Li Xiaofeng, et al. Optimization design of partially-segmented Halbach permanent magnet synchronous motor[J]. Transa- ctions of China Electrotechnical Society, 2021, 35(4): 787-800.
[5] Ostovic V. Memory motors[J]. IEEE Industry Applications Magazine, 2003, 9(1): 52-61.
[6] 林鹤云, 阳辉, 黄允凯, 等. 记忆电机的研究综述及最新进展[J]. 中国电机工程学报, 2013, 33(33): 57-67, 8.
Lin Heyun, Yang Hui, Huang Yunkai, et al. Overview and recent developments of memory machines[J]. Proceedings of the CSEE, 2013, 33(33): 57-67, 8.
[7] Yang Hui, Lin Heyun, Zhu Ziqiang, et al. A variable- flux hybrid-PM switched-flux memory machine for EV/HEV applications[J]. IEEE Transactions on Industry Applications, 2016, 52(3): 2203-2214.
[8] Yang Hui, Lin Heyun, Zhu Ziqiang. Recent advances in variable flux memory machines for traction appli- cations: a review[J]. CES Transactions on Electrical Machines and Systems, 2018, 2(1): 34-50.
[9] 葛梦, 李健, 陈俊桦. 变磁通记忆电机磁化特性分析[J]. 电工技术学报, 2020, 35(增刊1): 117-125.
Ge Meng, Li Jian, Chen Junhua. Analysis on mag- netization characteristics of a variable flux memory machine[J]. Transactions of China Electrotechnical Society, 2020, 35(S1): 117-125.
[10] 杨晨, 白保东, 陈德志, 等. 可变磁通永磁辅助同步磁阻电机设计与性能分析[J]. 电工技术学报, 2019, 34(3): 489-496.
Yang Chen, Bai Baodong, Chen Dezhi, et al. Design and analysis of a variable flux permanent magnet assisted synchronous motor[J]. Transactions of China Electrotechnical Society, 2019, 34(3): 489-496.
[11] 于占洋, 李岩, 井永腾, 等. 基于混合磁场解析法的磁极偏心型表贴式永磁同步电机空载特性分析[J]. 电工技术学报, 2020, 35(18): 3811-3820.
Yu Zhanyang, Li Yan, Jing Yongteng, et al. No-load characteristic analysis of surface-mounted permanent magnet synchronous motor with non-concentric pole based on hybrid magnetic field analysis method[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3811-3820.
[12] 郭凯凯, 郭有光. 磁通反向直线旋转永磁电机三维非线性等效磁路模型分析[J]. 电工技术学报, 2020, 35(20): 4278-4286.
Guo Kaikai, Guo Youguang. 3D nonlinear equivalent magnetic circuit model analysis of a flux reversal linear rotary permanent magnet machine[J]. Transa- ctions of China Electrotechnical Society, 2020, 35(20): 4278-4286.
[13] 庞古才, 邓智泉, 张忠明. 基于改进广义磁路法的表贴式永磁电机空载气隙磁场解析计算[J]. 电工技术学报, 2019, 34(22): 4623-4633.
Pang Gucai, Deng Zhiquan, Zhang Zhongming. Analytical calculation of no-load air gap magnetic field in surface-mounted permanent magnet motor based on improved generalized magnetic circuit method[J]. Transactions of China Electrotechnical Society, 2019, 34(22): 4623-4633.
[14] Zhu Xiaoyong, Chen Yunyun, Xiang Zixuan, et al. Electromagnetic performance analysis of a new stator-partitioned flux memory machine capable of online flux control[J]. IEEE Transactions on Mag- netics, 2016, 52(7): 1-4.
[15] Hsieh M F, Hsu Y C. A generalized magnetic circuit modeling approach for design of surface permanent- magnet machines[J]. IEEE Transactions on Industrial Electronics, 2012, 59(2): 779-792.
[16] Zhu Ziqiang, Hua Hao, Pride A, et al. Analysis and reduction of unipolar leakage flux in series hybrid permanent-magnet variable flux memory machines[J]. IEEE Transactions on Magnetics, 2017, 53(11): 1-4.
[17] Song J Y, Jin H L, Kim D W, et al. Analysis and modeling of concentrated winding variable flux memory motor using magnetic equivalent circuit method[J]. IEEE Transactions on Magnetics, 2017, 53(6): 1-4.
[18] Song J Y, Jin H L, Kim D W, et al. Analysis and modeling of permanent magnet variable flux memory motor using magnetic equivalent circuit method[J]. IEEE Transactions on Magnetics, 2017, DOI: 10.1109/ TMAG.2017.2657226.
[19] 王明杰, 贾宛英, 张志艳, 等. 永磁直线同步电机空载反电动势和推力的解析计算[J]. 电工技术学报, 2021, 36(5): 954-963.
Wang Mingjie, Jia Wanying, Zhang Zhiyan, et al. Analytical calculation of no-load electromotive force and thrust in permanent magent linear synchronous motors[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 954-963.
[20] Li Nian, Zhu Jianguo, Lin Mingyao, et al. Analysis of axial field flux-switching memory machine based on 3-D magnetic equivalent circuit network considering magnetic hysteresis[J]. IEEE Transactions on Mag- netics, 2019, DOI: 10.1109/TMAG.2019.2900 368.
[21] 刘旭, 孙朝勇, 刘岩岩. 新型多齿开关磁链永磁记忆电机分段线性磁滞模型研究[J]. 电机与控制学报, 2020, 24(5): 17-25.
Liu Xu, Sun Chaoyong, Liu Yanyan. Piecewise linear hysteresis model for multi-tooth switched flux permanent magnet memory machine[J]. Electric Machines and Control, 2020, 24(5): 17-25.
[22] 许泽刚, 谢少军, 毛鹏. 混合励磁磁通切换电机等效磁路模型[J]. 中国电机工程学报, 2011, 31(30): 124-131.
Xu Zegang, Xie Shaojun, Mao Peng. Equivalent magnetic circuit model of flux-switching hybrid excitation machine[J]. Proceedings of the CSEE, 2011, 31(30): 124-131.
[23] 许泽刚, 谢少军, 许津铭. 12/10极混合励磁磁通切换电机的快速设计[J]. 电机与控制学报, 2013, 17(3): 76-83.
Xu Zegang, Xie Shaojun, Xu Jinming. Rapid design of 12-slot 10-pole flux-switching hybrid excitation machine[J]. Electric Machines and Control, 2013, 17(3): 76-83.
Accurate Magnetic Circuit Model of Multi-Tooth Switched Flux Permanent Magnet Memory Machine Considering the Mutual Inductance
Abstract The mutual inductance between adjacent armature windings of the multi-tooth switched flux permanent magnet memory machine (multi-tooth SFPMMM) is large, which will produce a large error if the mutual inductance is ignored in the optimal design. To improve the accuracy of optimization, the equivalent magnetic circuit model (EMCM) considering the mutual inductance and the end leakage was proposed in the paper. And an equivalent model considering the mutual inductance between two adjacent phases of the multi-tooth SFPMMM was established. Finally, the results of finite element analysis and the experimental prototype were used for verification. Compared with the EMCM without considering the mutual inductance, the experimental results show that the calculation accuracy of the back electromotive force (back-EMF) in no-load condition is improved by 15.3% using the proposed model.
keywords:Multi-tooth switched flux permanent magnet memory machine, equivalent magnetic circuit model, mutual effect
DOI: 10.19595/j.cnki.1000-6753.tces.201338
中图分类号:TM351
沈月芬 女,1994年生,硕士研究生,研究方向为永磁记忆电机的设计。E-mail: shenyf.ee@qq.com
刘 旭 男,1984年生,教授,博士生导师,研究方向为永磁电机及其控制。E-mail: liuxu@hebut.edu.cn(通信作者)
收稿日期 2020-10-09
改稿日期 2020-12-22
国家自然科学基金(52077055)和河北省自然科学基金(E2018202252)资助项目。
(编辑 崔文静)