
图1 手柄式操作力矩检测装置及测量结果
Fig.1 The handle-type operating torque detection device and measurement results
摘要隔离开关故障频发却缺乏有效诊断方法,该文提出一种基于操作力矩波形的隔离开关机械状态智能诊断方法。为对操作力矩进行准确检测,研制了电机式操作力矩检测装置,并通过刚柔耦合动力学仿真模型验证了试验结果的准确性,通过模拟合闸不到位、卡涩和三相不同期三种典型机械缺陷,分析总结操作力矩在不同机械状态下变化规律。从波形中提取啮合前力矩均值、啮合角度、停止角度三个特征量,作为神经网络诊断模型的输入,实现缺陷智能判断。再从特征量中反演出表征故障严重程度的故障量,使该诊断技术不仅能判断正常、卡涩、三相不同期和合闸不到位四种机械状态,还可输出卡涩等级与标准位相差角度,触头触指间距离等与检修标准密切相关的故障量,为隔离开关检修提供实用性参考。
关键词:隔离开关 故障诊断 动力学仿真 神经网络
2017年国家电网公司牵头智能运检体系建设,发布《智能运检白皮书》,全力推动电力检修方式从传统计划检修向状态检修的积极转变,致力于打造以状态实时检测为基础、以故障有效诊断和决策为输出的智能运检体系[1]。
在众多电力设备中,高压隔离开关应用规模、故障次数均位列高压输变电设备榜首。根据国家电网公司2015年开关设备运行情况统计,全国高压隔离开关设备在运368 454套[2],常与断路器配合使用,以便形成明显断口,确保断电的可靠性。而户外隔离开关因为工作在开放环境中,经历不同天气状况,伴随空气中灰尘、粉尘等颗粒污染物的长期堆积[3],叠加了需在现场进行安装调试的不确定性,以及相关研发投入不足、性能提升缓慢[4]的市场现状,使得隔离开关故障率居高不下。而且隔离开关数量多、分布广,随着用电负荷的日益增长,隔离开关年久失修引起的事故占比越来越高,对电网造成巨大影响,例如广东电网某500kV变电站“4.10”事件及某500kV变电站“4.11”事件,均是因为没有及时发现隔离开关存在隐患,最终造成大面积停电[5]。
据国网公司开关设备运行情况统计,2015年72.5kV及以上隔离开关发生缺陷7 682台·次[2];浙江电网2014年在役110kV及以上开放式隔离开关32 934台,2006年~2014年发生故障3 777起,其中锈蚀、触头发热、卡涩等典型故障共发生2 664起,占总故障的70%以上[5];2008年~2016年,云南电网110kV 及以上电压等级的隔离开关一共发生357起缺陷故障,其中机械故障缺陷占比54.62%[3];2019年,江西电网在役110kV及以上隔离开关35 881台,其中220kV及以上隔离开关全年发生严重及以上缺陷57处,占变电设备的43%。
而隔离开关现行检修方式依旧以计划检修为主,其判断在很大程度上依赖运维人员经验,如《隔离开关和接地开关状态评价导则》要求对隔离开关各部件是否存在缺陷逐一判断和打分,但判断手段模糊且无法同时诊断多种故障,操作性差[6]。
随着智能运检的发展与推进,国内外学者也对隔离开关的状态检修开展系列研究。有的学者基于隔离开关分合闸轨迹判断隔离开关是否正常,如王黎明等归纳出基于隔离开关主轴转角特性的故障诊断方法[7];马宏明等将此方法应用于折叠式隔离开关,取得一定效果[8]。这种方法直观明晰,但对于不改变隔离开关运动特性的轻微卡涩等机械故障,不能有效识别。李少华等通过振动信号与各状态标准信号的相似程度来判断隔离开关状态[9],随后采用ReliefF算法和BP神经网络实现故障类型、位置诊断[10];Jia Yongyong等通过振动信号判断气体金属封闭开关设备(Gas Insulated Switchgear, GIS)内隔离开关合闸状态[11-12]。振动信号也是目前对断路器机械缺陷诊断的主流研究方向[13-16],但振动信号仅对零件松动和间歇性接触等故障敏感[17],对卡涩、不同期等常见故障无明显特征,且检测结果受传感器安装位置影响大,稳定性和通用性不高。考虑到电机是隔离开关的动力来源,许多学者提出将电机电流作为隔离开关机械状态的在线检测状态量。王黎明提出利用电机电流时间特性及电机功率转角特性诊断隔离开关机械故障的设想,但尚未进行实际试验验证[7];刘贤杰等以电流信号为判断标准防止电机过载及支柱绝缘子断裂,但并未进行定量分析[18];邱志斌和Peng Tao等推导了电机电流与操作力矩的函数关系[19-22],通过电流幅值及时间点判断隔离开关是否卡涩,但电机电流信号在隔离开关机械故障诊断中尚无实际应用,且在电流信号的特征提取和智能诊断方面缺乏深入研究。
针对隔离开关机械故障频发,对电力系统构成严重威胁,且缺乏有效检测诊断方法的现状,本文基于刚柔耦合动力学仿真和操作力矩-转角检测平台的检测结果,提出操作力矩与隔离开关机械故障密切相关,能有效反映诊断隔离开关机械状态,随后结合神经网络,提取力矩波形特征量,实现隔离开关机械状态的智能化诊断,准确判断故障类型并输出表征故障程度的对应参数。
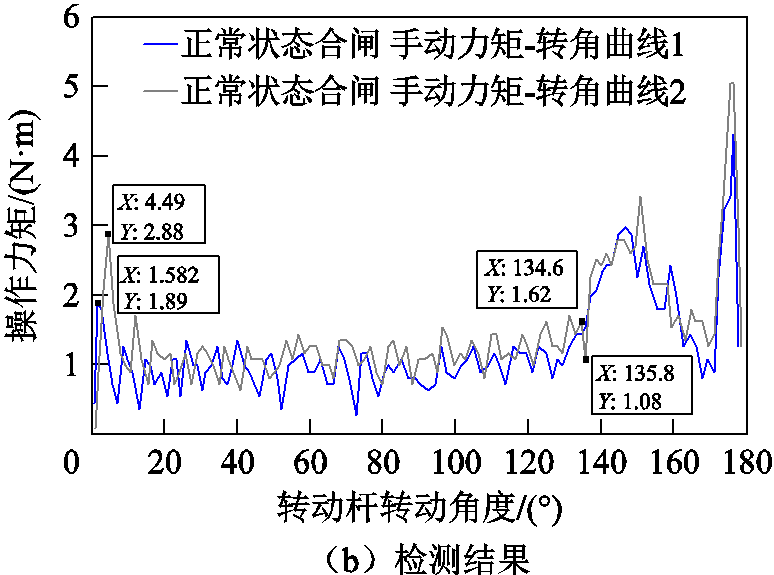
隔离开关作为电机驱动的动态设备,其性能与操作力矩密切相关。日常运维中,电力工人常通过手柄进行手动分合闸操作时的手感轻重来判断机械状态,由此设计手柄式操作力矩检测装置,如图1a所示,内置式力矩传感器能实时检测分合闸过程中力矩变化情况。以系统中常见的GW4型水平双柱旋转式隔离开关为试验对象,采用该手柄式力矩传感器从操作机构箱手动操作口进行多次手动合闸操作,以隔离开关垂直连杆的转动角度为横坐标,操作力矩为纵坐标,绘制合闸过程的力矩波形如图1b所示。
图1 手柄式操作力矩检测装置及测量结果
Fig.1 The handle-type operating torque detection device and measurement results
从图1中可以看出,测得的力矩-转角曲线存在较大波动,且两次检测结果差异较大,主要是因为手动操作时受操作者个人影响极大,难以保证手柄匀速转动,因此无法作为有效参考。为了避免人力影响,设计电机式力矩检测装置,改用步进电机提供稳定驱动,带动角度传感器和力矩传感器后通过连杆与隔离开关相连,如图2a所示。
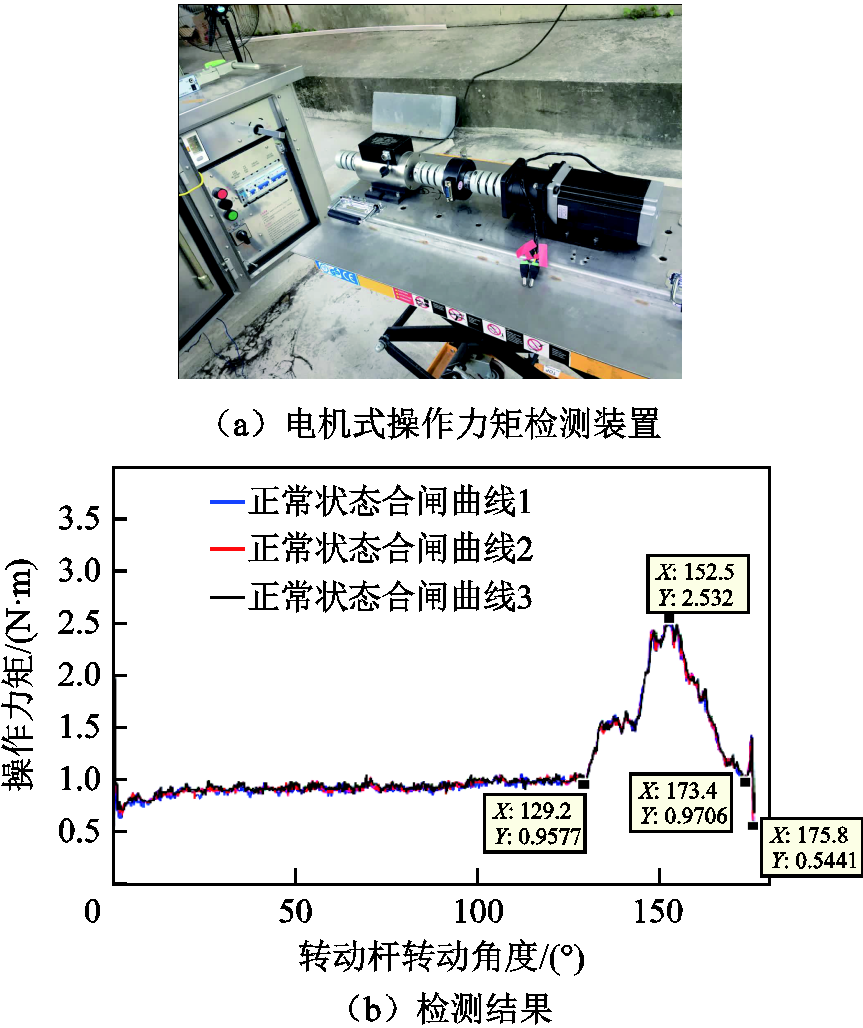
图2 电机式操作力矩检测装置及测量结果
Fig.2 The motor-type operating torque detection device and measurement results
对同一台GW4型隔离开关进行多次检测后,绘制的操作力矩-转角曲线如图2b所示。从图中可看出,三次合闸曲线基本重合,可见电机式操作力矩检测装置稳定性好,能获得可靠的操作力矩特性曲线。
为对试验测得的力矩波形进行验证与分析,建立试验对象的动力学仿真模型,考虑到隔离开关触指和簧片的形变与其隔离开关性能密切相关,需采用柔性体模型,其他无明显形变的结构视为刚体。由此建立隔离开关刚柔耦合动力学仿真模型,仿真流程如图3所示,需要分别进行刚性体和柔性体建模后再进行耦合。
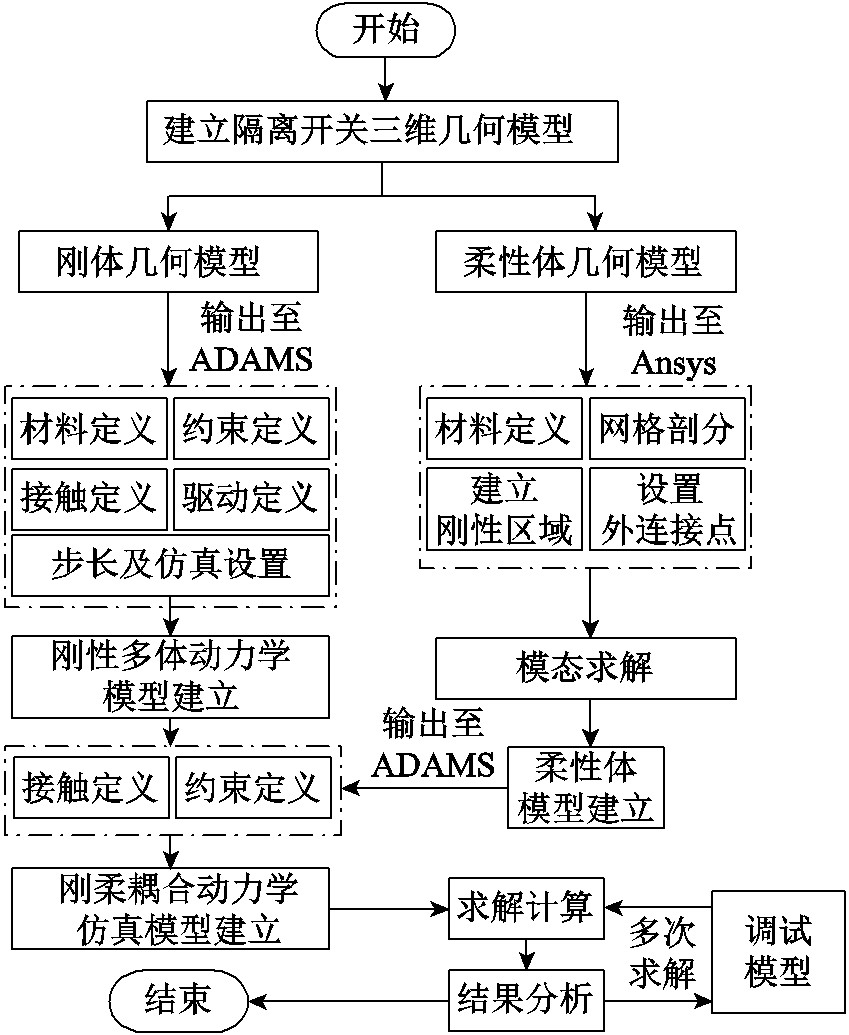
图3 动力学仿真流程
Fig.3 Flow chart of dynamic simulation
隔离开关的传动结构(如连杆等零部件)的材质主要是碳钢,导电部分(如触头、触指)为黄铜材质,支柱绝缘子为陶瓷材质,按实际情况给各部件赋予密度、杨氏模型、泊松比等物理特性,并按照实际装配关系在各零部件间施加固定、旋转、滑移等运动约束,隔离开关刚体模型如图4所示。
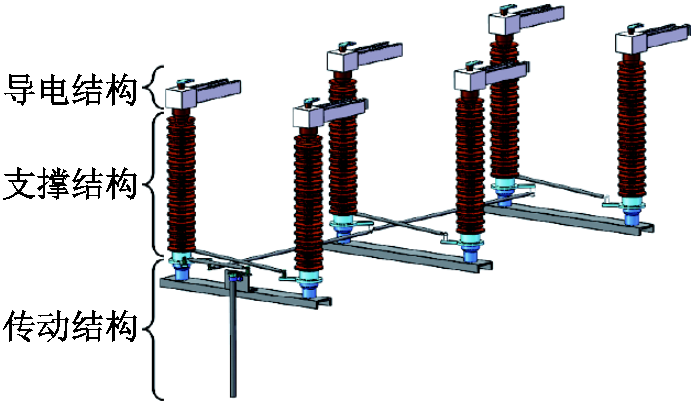
图4 GW4型隔离开关刚体模型
Fig.4 Rigid model of the GW4 disconntecor
将柔性部件(如触指、簧片)的几何模型逐一导入有限元分析软件,设置材料属性后采用六面体进行网格剖分,采用刚性区域法生成模态中性文件(Modal Neutral File, MNF)。GW4型隔离开关柔性体模型如图5所示。对触指而言,选择螺栓孔作为刚性连接区域,将MNF导入隔离开关刚体模型,固定在触指座相应位置,此模型共有六根触指,每边三根分列在触指座两边,簧片与每一根触指的螺栓孔同心对应,如图5b所示。在触头触指间设置刚体与柔性体间采用impact模型计算接触力[18]。
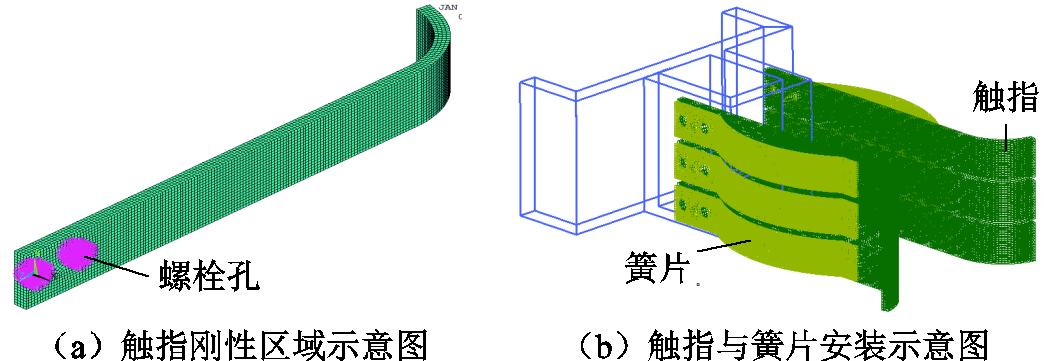
图5 GW4型隔离开关柔性体模型
Fig.5 Flexible model of the GW4 disconntecor
通过在传动结构的垂直连杆下端施加固定角速度3.6°/s,驱动垂直连杆匀速转动,带动隔离开关合闸。仿真所得合闸过程的操作力矩与触头触指间接触力曲线如图6所示,其中实线为操作力矩,虚线和点画线分别为内、外侧触指的接触力。从图6可见,由于触头与内、外触指的先后接触和挤压,导致力矩波形有两个明显的波峰与一个波谷,与试验结果曲线特征一致。
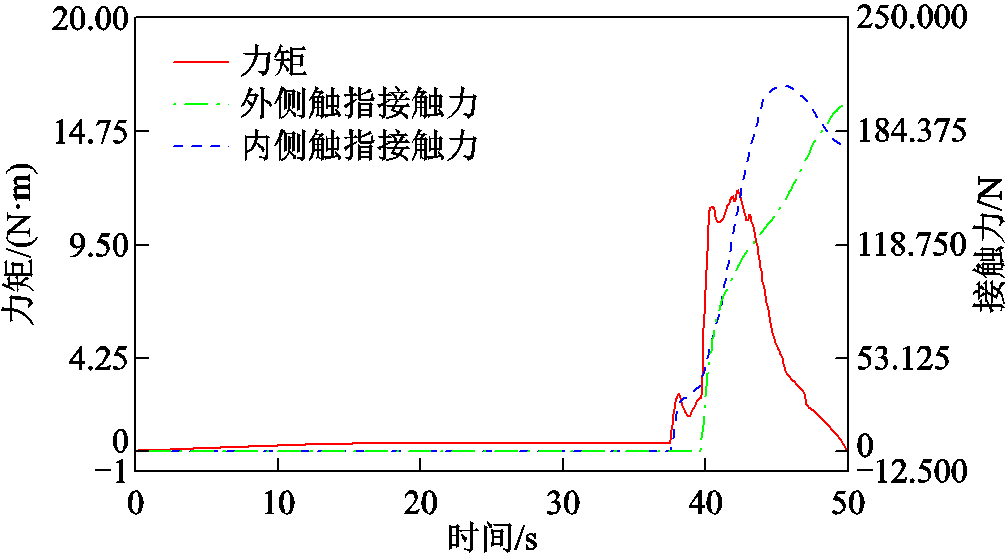
图6 力矩与接触力曲线
Fig.6 The waves of torque and contact force
与仿真模型相比,试验时力矩传感器在操作机构箱外侧,还需经过操作箱中的减速器和齿轮等传动环节才传动至垂直连杆部位[23],因此松开垂直连杆与机构箱出口轴的固定抱箍,测得减速器与齿轮等结构的操作箱内传动部分空载力矩曲线如图7a所示。试验测得的合闸力矩曲线减去此空载曲线并经减速器的传动比换算后,即为换算到仿真等效模型的操作力矩曲线,换算后的试验与仿真曲线对比如图7b所示。
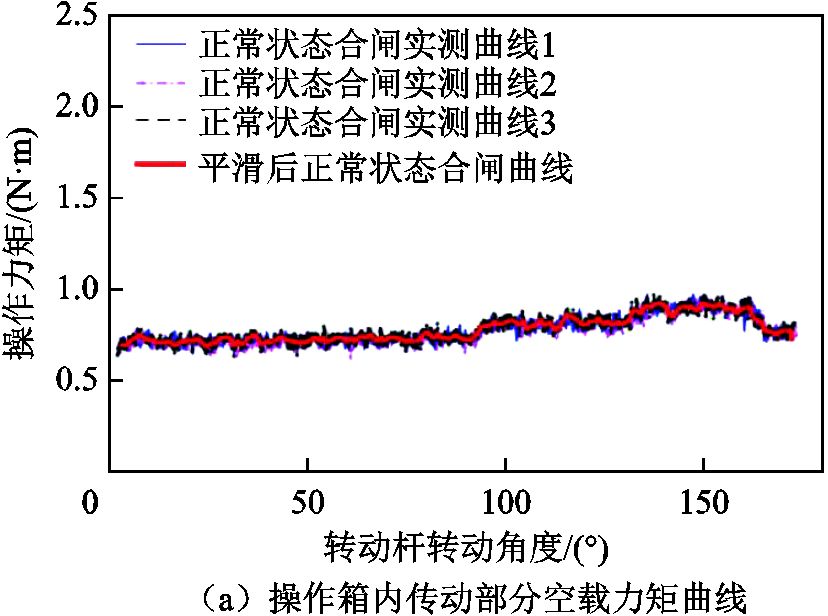
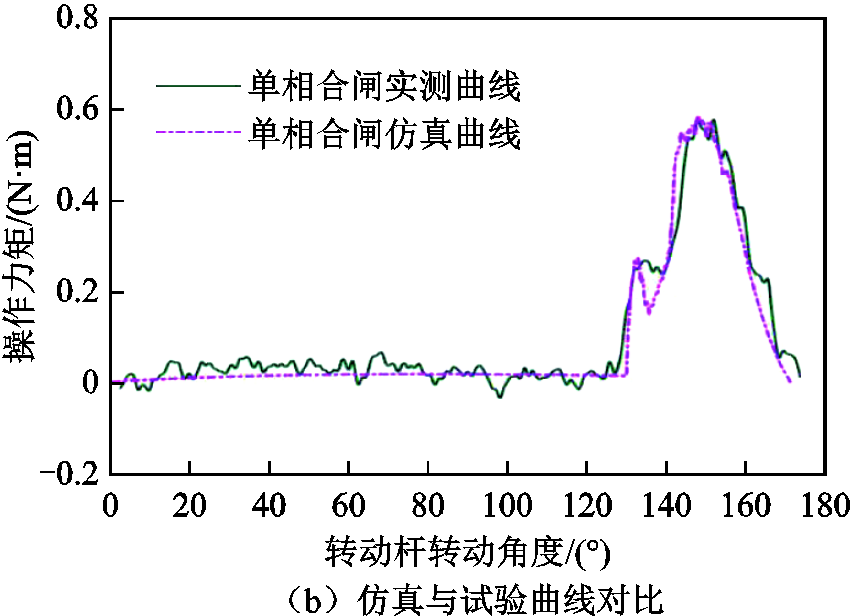
图7 正常状态下试验与仿真力矩曲线对比图
Fig.7 The contradistinction between simulation result and experiment results in normal status
为对两曲线进行定量分析,结合隔离开关合闸过程特性,从波形中提取啮合前均值、啮合角度、力矩最大值、力矩最大值角度、包络线峭度、停止角度作为特征量,两曲线的特征量计算结果见表1。可见各特征值误差均小于5%,证明仿真与试验结果一致。
表1 正常状态下力矩波形特征量
Tab.1 The characteristic of torque waves in normal status
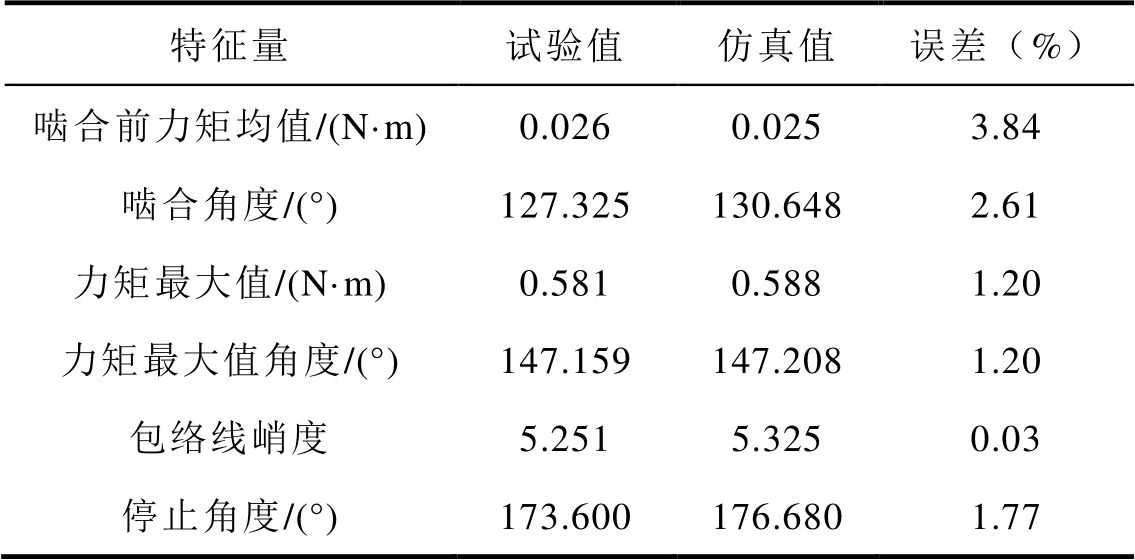
特征量试验值仿真值误差(%) 啮合前力矩均值/(N·m)0.0260.0253.84 啮合角度/(°)127.325130.6482.61 力矩最大值/(N·m)0.5810.5881.20 力矩最大值角度/(°)147.159147.2081.20 包络线峭度5.2515.3250.03 停止角度/(°)173.600176.6801.77
合闸不到位是隔离开关常见故障之一,容易造成触头触指间接触电阻过大,引起触头发热甚至烧蚀。改变试验中控制电机起停的限位装置位置,使限位挡板与分合闸位置定位器提前接触,电机提前停止,可模拟隔离开关分合闸不到位缺陷[24]。采用前述电机式操作力矩测量装置测得合闸不到位时力矩曲线,与正常状态曲线对比如图8所示。
图8中实线为正常状态力矩曲线,虚线为合闸不到位时力矩曲线,两曲线基本重合。但在合闸快结束时,合闸不到位曲线比正常曲线缺失了一部分,从横坐标转动角度来看,正常曲线在175.7°左右停止,而合闸不到位曲线在167.6°左右停止,该停止角度主要与合闸定位器的位置有关。
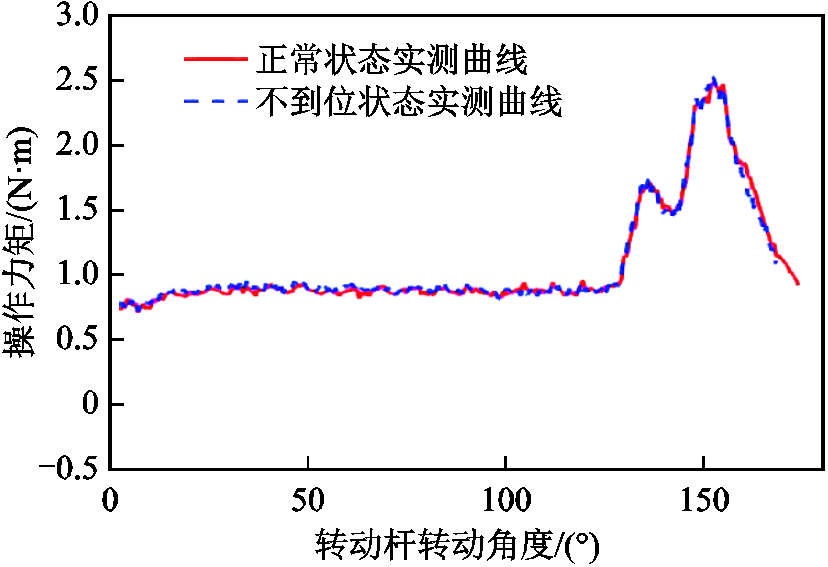
图8 合闸不到位状态与正常状态曲线对比
Fig.8 The contradistinction of torque wave between normal status and incorrect closing status
为了更加直观比较曲线在不同状态下变化程度,同样选取隔离开关啮合前力矩的平均值、啮合角度、最大力矩值、最大力矩出现角度、包络线峭度和隔离开关停止角度作为特征量,并以归一化协方差系数R来体现曲线相似度,定量描述两波形曲线的相似程度,设有两个长度为N的操作力矩值序列X(k)、Y(k)(k=0,1,…,N-1),且X(k)、Y(k)为实数,归一化协方差系数Rxy可按下列公式计算。
首先计算两个序列的标准方差
 (1)
(1) (2)
(2)然后计算两个序列的协方差
 (3)
(3)便可以计算两个序列的归一化协方差系数为
 (4)
(4)式中,N为操作力矩-转角曲线的数据长度;Rxy可表征两曲线的相似度相关,取值为0<Rxy≤1,Rxy越大表示曲线相似度越高。
合闸不到位状态与正常状态特征值对比见表2。可见合闸不到位状态下力矩波形变化主要表现在停止角度发生变化,因而引起包络线峭度随之改变。
运行一段时间后,隔离开关的轴承等部位容易因为润滑剂干枯和金属件锈蚀等原因发生卡涩缺陷,是造成隔离开关拒动的主要原因之一。在隔离开关槽钢上固定一个环形抱箍,可通过抱紧绝缘子底部法兰施加转动阻力来模拟卡涩缺陷,通过螺钉松紧可调节阻力大小[25],如图9所示。
表2 合闸不到位状态与正常状态特征值对比
Tab.2 The contradistinction of characteristic between normal status and incorrect closing status
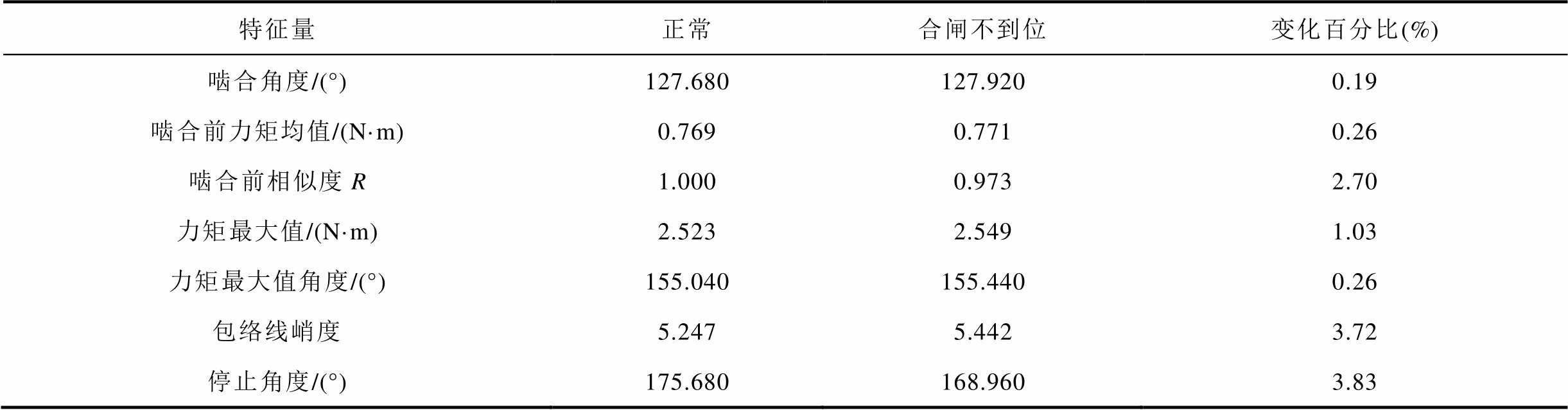
特征量正常合闸不到位变化百分比(%) 啮合角度/(°)127.680127.9200.19 啮合前力矩均值/(N·m)0.7690.7710.26 啮合前相似度R1.0000.9732.70 力矩最大值/(N·m)2.5232.5491.03 力矩最大值角度/(°)155.040155.4400.26 包络线峭度5.2475.4423.72 停止角度/(°)175.680168.9603.83
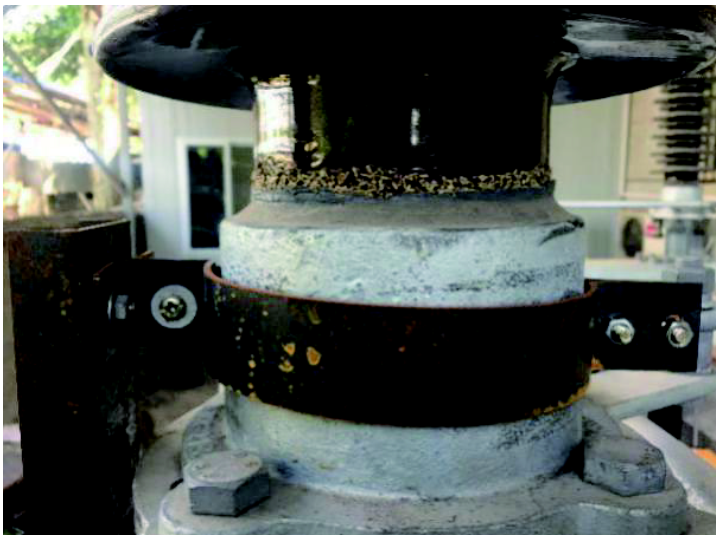
图9 卡涩状态模拟装置
Fig.9 Device to simulate stucking status
正常状态与三种不同程度轴承卡涩状态下力矩波形对比如图10所示,卡涩状态时力矩波形高于正常状态,但波峰波谷位置基本不变。因为模拟轴承卡涩的抱箍与法兰间摩擦力不连续,导致所测操作力矩曲线存在较大的波动,但对各特征量的分析影响较小。选取卡涩最严重时曲线与正常状态曲线的特征量对比见表3。
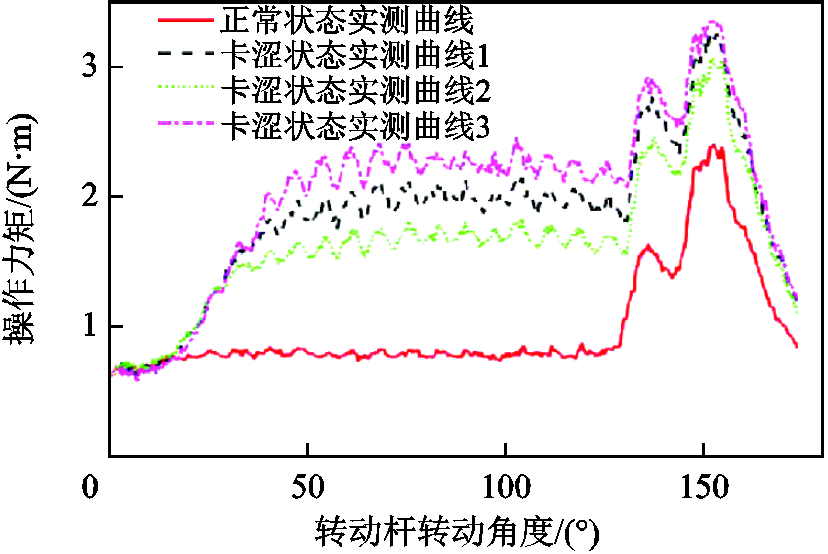
图10 卡涩状态与正常状态曲线对比
Fig.10 The contradistinction of torque wave between normal status and stucking status
表3 卡涩状态与正常状态特征值对比
Tab.3 The contradistinction of characteristic between normal status and stucking status
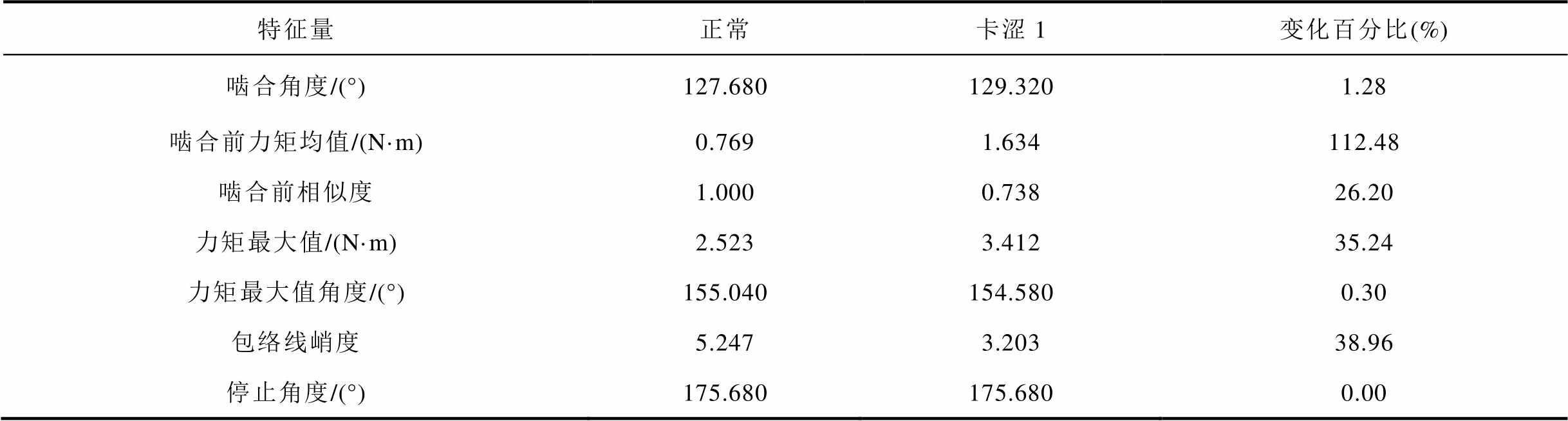
特征量正常卡涩1变化百分比(%) 啮合角度/(°)127.680129.3201.28 啮合前力矩均值/(N·m)0.7691.634112.48 啮合前相似度1.0000.73826.20 力矩最大值/(N·m)2.5233.41235.24 力矩最大值角度/(°)155.040154.5800.30 包络线峭度5.2473.20338.96 停止角度/(°)175.680175.6800.00
从表3中可以看出:卡涩状态与正常状态的操作杆转动角度相同,力矩最大值对应角度和停止角度基本没有变化,但卡涩状态的力矩均值与极值均大于正常状态,因此相似度和包络线峭度也随之改变。结合不同程度的卡涩波形和表中数据,可见发生卡涩故障时,角度相关特征量不发生明显变化,力矩值显著增大。
隔离开关的三相不同期是指隔离开关合闸过程中,其中一相最先接触时,其余两相触指触头最小距离中的较大值。对于110kV电压等级的隔离开关,要求其三相不同期≤10mm。本文研究对象GW4A—126W型隔离开关长度可调的部件有操动拐臂、操动连杆、交叉连杆、相间连杆、BC相联动拐臂、三相从动拐臂,如图11所示。调整BC相间连杆长度,使C相不同期,此时A、B相运动不受影响。
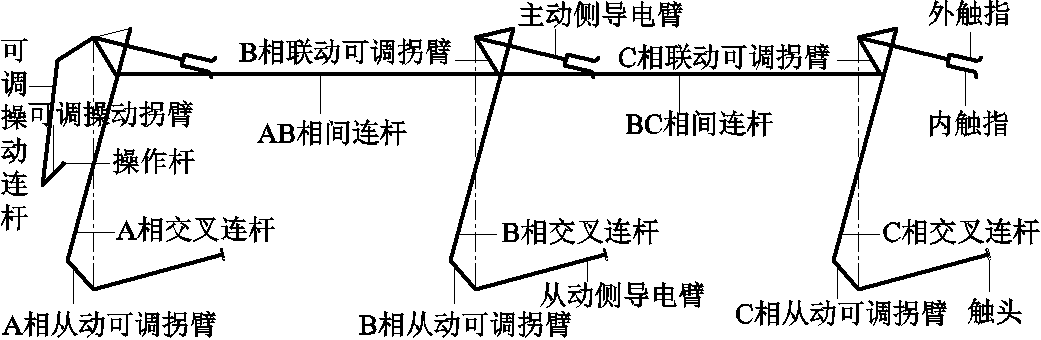
图11 GW4型隔离开关可调节部位示意图
Fig.11 The adjustable components of GW4 disconnector
三相不同期与正常状态的电动操作力矩-转角对比曲线如图12所示。可见,三相不同期缺陷时,触头触指啮合前的曲线与正常状态基本一致;触头触指啮合时,三相不同期曲线与正常状态有明显变化,主要表现在啮合角提前,且第一个波峰明显增大,选取其中一条三相不同期曲线,与正常状态特征量对比结果见表4。
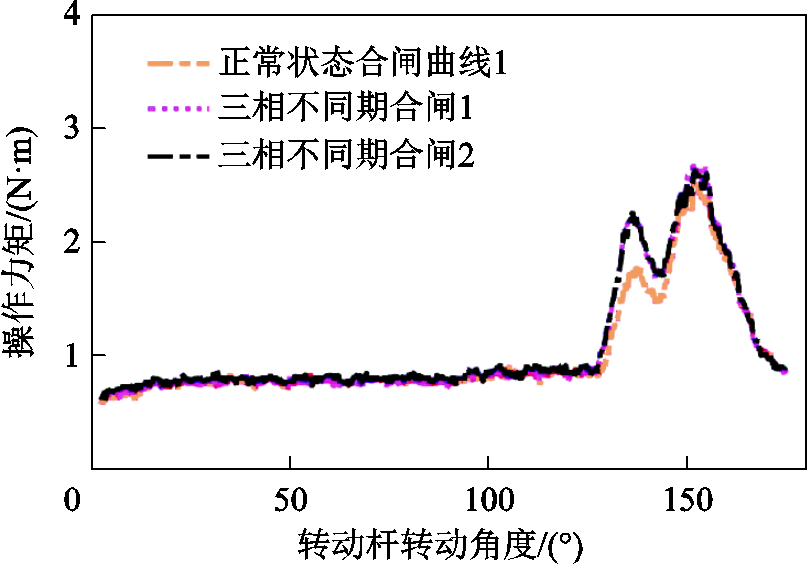
图12 三相不同期状态与正常状态曲线对比
Fig.12 The contradistinction of torque wave between normal status and inconsistent closing status
表4 三相不同期状态与正常状态特征值对比
Tab.4 The contradistinction of characteristic between normal status and inconsistent closing status
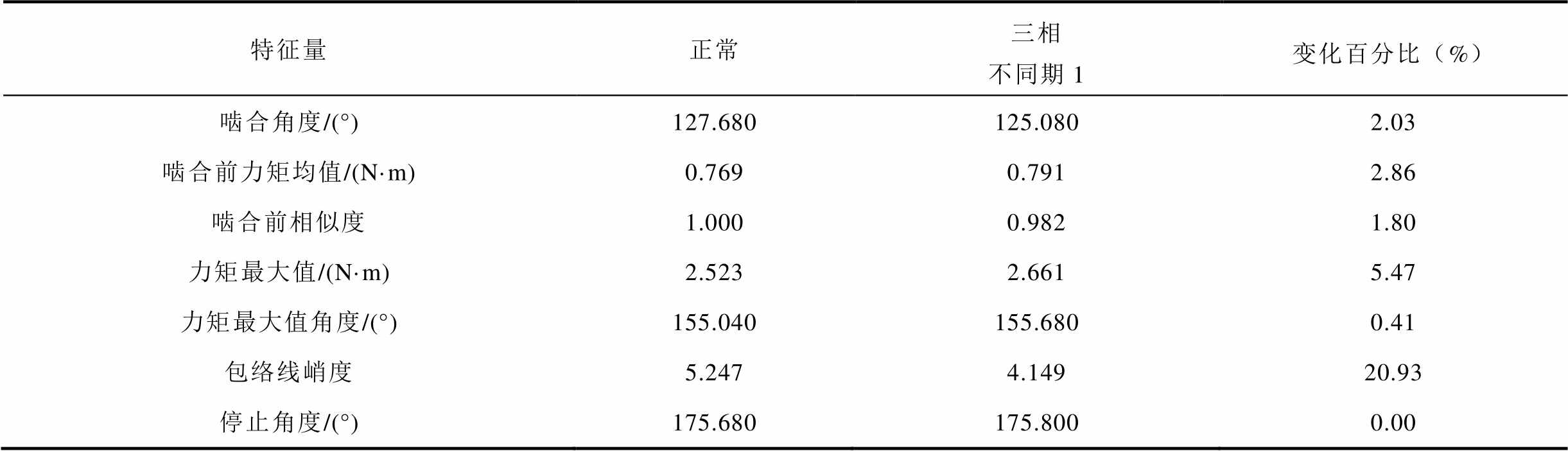
特征量正常三相不同期1变化百分比(%) 啮合角度/(°)127.680125.0802.03 啮合前力矩均值/(N·m)0.7690.7912.86 啮合前相似度1.0000.9821.80 力矩最大值/(N·m)2.5232.6615.47 力矩最大值角度/(°)155.040155.6800.41 包络线峭度5.2474.14920.93 停止角度/(°)175.680175.8000.00
从表4中可以看出:三相不同期与正常状态时操作杆转动角度相同;啮合前力矩均值与正常状态相差较小,啮合前整体波形与正常状态相似度较高,变化主要体现在包络线峭度和力矩最大值,与卡涩及合闸不到位缺陷相比,啮合角度首次发生改变。
前文可见,力矩曲线对机械故障变化较敏感,但不同故障特征量变化错综且无定量标准,因此考虑采用神经网络算法进行故障类型的智能判断。
由于试验获取效率较低,通过对已有的检测波形进行方差分析,采用随机误差法生成各类型操作力矩曲线各150条,共计600条,构成样本数据库。提取样本的啮合角度、停止角度、啮合前力矩均值三种特征值,作为神经网络诊断模型的输入。
为判断隔离开关典型机械状态的正常状态、不到位状态、卡涩状态和三相不同期状态四种典型缺陷,因此输出层设计了四个对应输出层节点。
隐藏层介于输入层和输出层之间。其层数与迭代次数和准确率密切相关,如果隐藏层神经元数量过高,能使网络表达更加复杂的数学公式,但迭代次数也随之增加,可能会导致无法收敛,整体呈现过拟合;相反,如果隐含层的数量过低,则会导致网络不能充分学习,预测准确率降低。在本系统中,参考其他文献,依据式(5)确定隐含层神经元数量[26-28]。
 (5)
(5)式中,n为输入层的神经元个数;m为输出层神经元个数;a为常数,取值通常在1~10。因此,本模型中将隐含层神经元个数设置为10。形成了3-8-4结构的网络,如图13所示。

图13 神经网络模型结构
Fig.13 The framework of the neural network model
隐藏层和输入层分别采用tansig和purelin函数,采用梯度下降自适应学习率训练函数tringdx,以方均差为误差判断标准,设收敛标准为0.01,学习率为0.01,最大迭代次数20 000,有效性检查值为50,进行训练学习。
该网络经过1 214次迭代达到目标误差0.01,梯度在0.1~0.5范围波动,学习率在0~2波动,整体收敛速度快,收敛稳定性较好。随机抽取正常状态60条,卡涩缺陷、三相不同期缺陷和合闸不到位缺陷各20条,共计120条曲线作为测试样本,预测结果如图14所示,“○”为预测结果,“*”为聚类后的输出类别,其中纵坐标1~4分别代表卡涩缺陷、正常状态、三相不同期缺陷和合闸不到位缺陷,预测准确率达100%。
确定性系数R(coefficient of determination),表示方程中变量X对Y的解释程度。R取值在0~1之间,越接近1,表明方程中X对Y的解释能力越强。该模型的回归线分析如图15所示,R值均接近1,证明网络模型性能优秀,预测精度高。
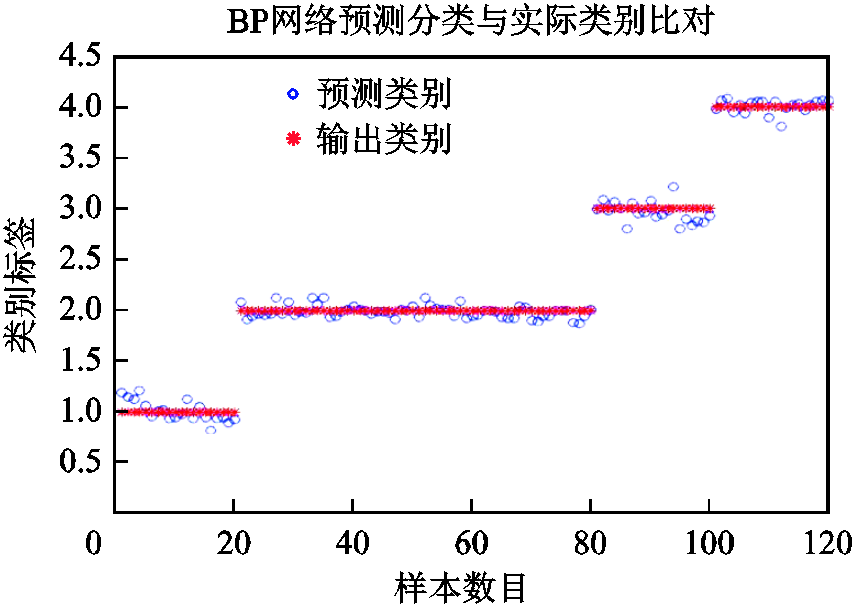
图14 神经网络模型预测效果
Fig.14 The prediction effect of neural network model
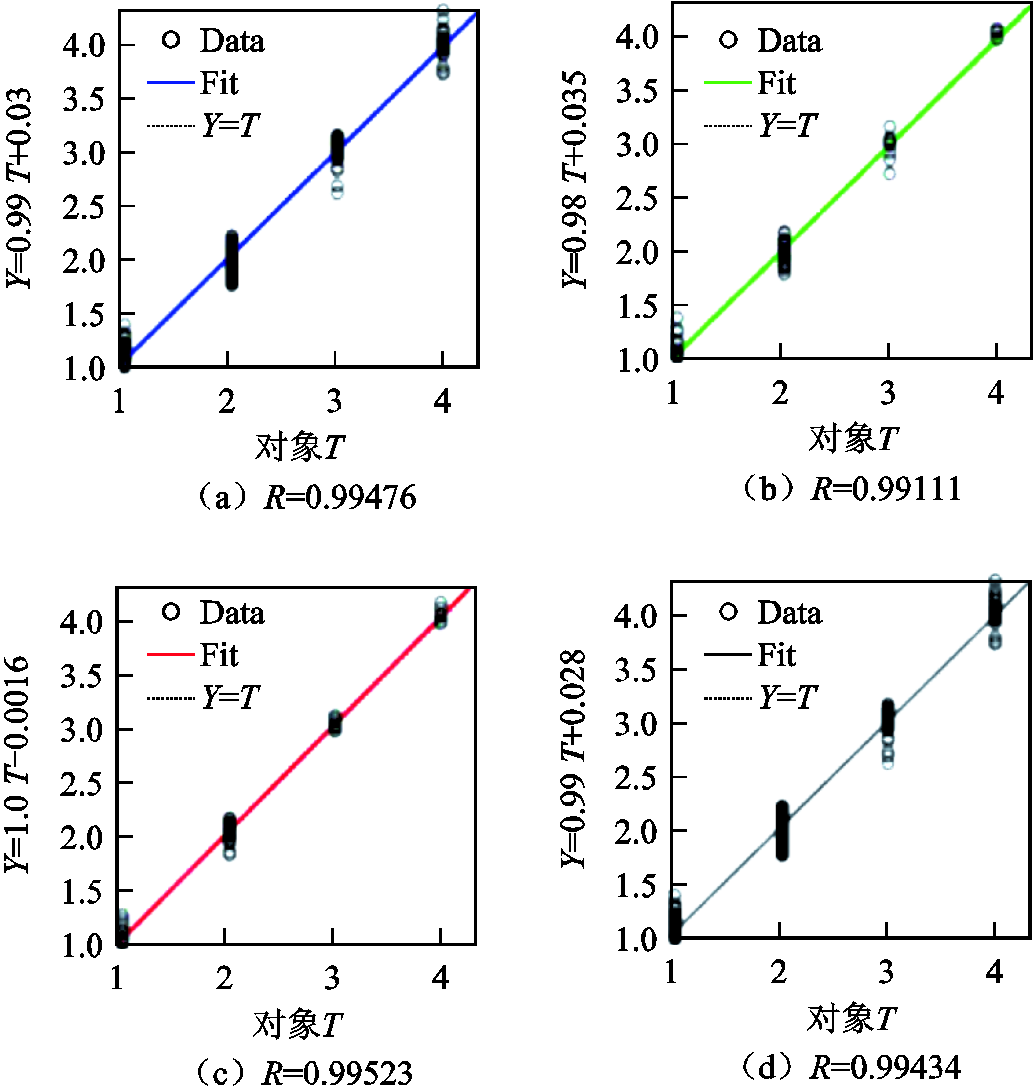
图15 神经网络模型的确定性分析
Fig.15 The determination of the neural network model
考虑到工程中隔离开关机械缺陷多样,采集的样本占比较小,因此探索样本数目对模型判断效果的影响。设训练样本比例为n,600条曲线数据库中,有x个训练样本,测试样本数量为600-x。调整训练样本比例,探究样本数目对判断效果的影响。考虑到训练随机性,对网络进行多次训练与预测,统计判断错误的测试样本数量,去掉最大值与最小值后计算平均错误个数a和准确率c,则训练样本比例n=x/600,准确率c=a/(600-x),平均错误个数和准确率随样本比例变化情况如图16所示。从图中可知,本模型判断准确率较高,即使在样本占比较少的情况下也能有效判断待诊断设备状态。
3.2.1 卡涩分级
不同卡涩程度对隔离开关的威胁程度不同,实际运行时采取的应对措施也不同,因此有必要对卡涩程度进行进一步区分。
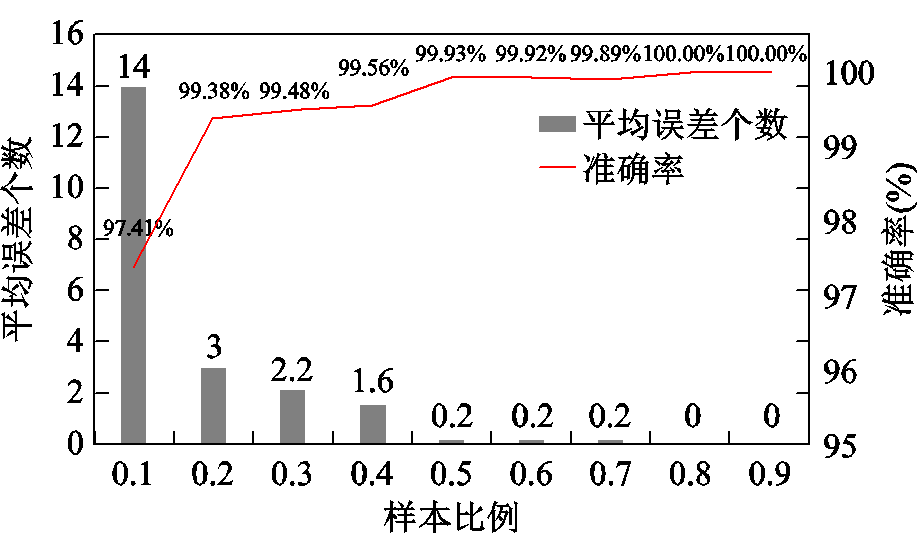
图16 预测准确性与样本比例的关系
Fig.16 The relationship between the proportion of training samples and exactness
以电机能提供的最大力矩和正常状态下操作力矩为上、下限,均分为轻度卡涩、中度卡涩和重度卡涩三种状态,获得不同程度卡涩实测的操作力矩临界值见表5。
表5 不同卡涩等级对应的力矩值
Tab.5 Torque values corresponding to different levels of interference

卡涩等级操作力矩啮合前均值/(N·m) 正常<1 轻度卡涩1~4 中度卡涩4~7 重度卡涩>7
按照上述卡涩等级划分标准优化神经网络诊断系统,对诊断为卡涩状态的隔离开关依据其啮合前力矩均值判断其卡涩程度,卡涩分级优化的神经网络模型如图17所示。

图17 卡涩分级优化的神经网络模型
Fig.17 The neural network model optimized by classified stucking status
为了验证该神经网络预测效果,建立包含正常状态、不到位状态、不同期状态、轻度卡涩状态、中度卡涩状态和重度卡涩状态六种机械状态的各100条操作力矩-转角曲线数据库,将80%作为训练样本,20%作为测试样本,如图18所示。

图18 样本组成示意图
Fig.18 The composition of the sample
将样本特征值输入改进后的神经网络模型,采用tringdm训练函数,以方均差为误差判断标准,设收敛标准为0.01,学习率为0.01进行样本学习,经过1 210步计算收敛,且方程的确定性系数R均大于0.99,证明网络模型性能优秀。
对测试样本的预测结果如图19所示,可见本模型可有效判断出故障类型,并对判断为卡涩故障的样本进一步判断其卡涩程度,输出轻度、中度、重度三种判断结果,图中“○”为预测结果,“*”为标准结果,聚类后的预测卡涩等级与标准卡涩等级完全吻合,可见预测效果优异。
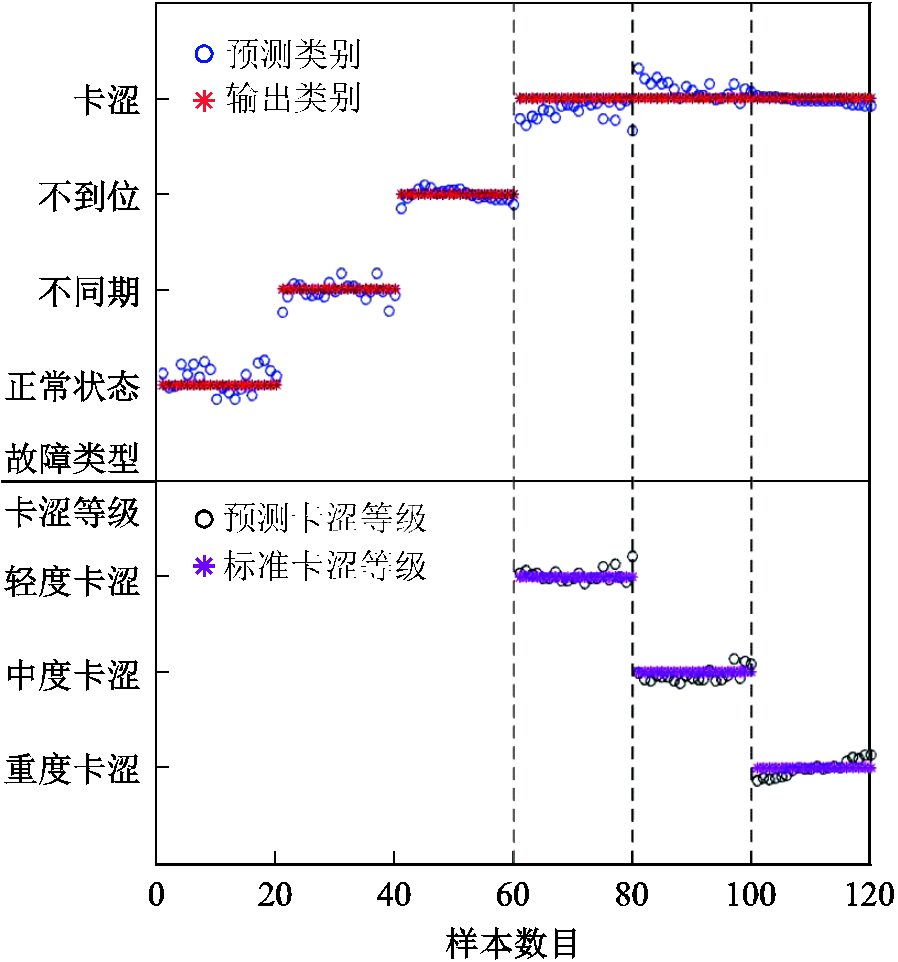
图19 卡涩分级优化的神经网络模型预测效果
Fig.19 The prediction effect of the optimized neural network model
3.2.2 角度映射
日常运维与标准中对三相不同期缺陷与合闸不到位缺陷的判断通常选择触头触指间距离及主、从动级转角与标准合闸位相差角度为依据,因此有必要建立所测的操作杆转动角度与这些关注量间的对应关系。
1)操作杆转动角度与主、从动级转角映射
从仿真软件中输出合闸过程主、从动极转角与操作杆转角数据。由于考虑的主要为合闸不到位故障,因此选择操作杆转动160°~180°区间内,以操作杆转动角度为横坐标,以主、从动极与标准合闸到位时相差角度为纵坐标绘制曲线,如图20所示。
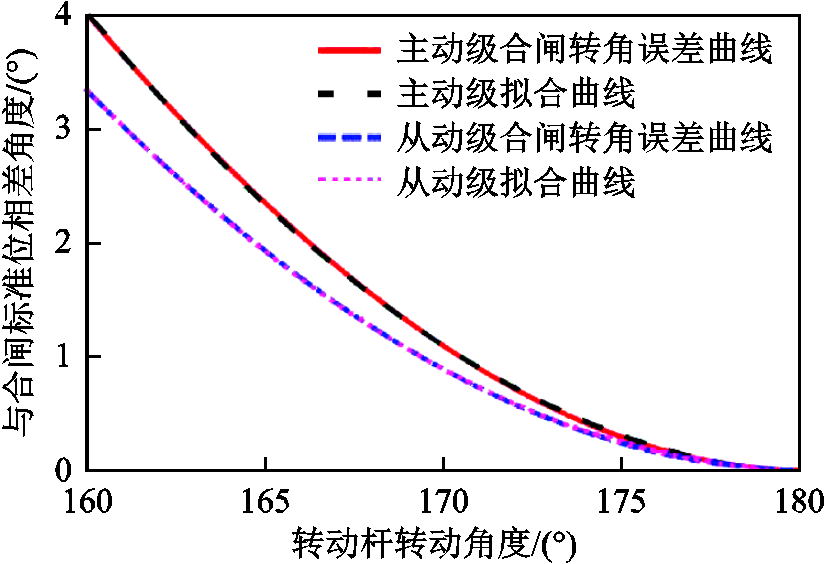
图20 检测角度与合闸误差角度关系
Fig.20 The relationship between the detected angle and the error angle of closing
采用多项式进行拟合,经尝试发现多项式最高次为2次项可满足拟合误差小于0.1的要求,最终拟合获得的主、从动极误差角度分别为
 (6)
(6) (7)
(7)式中,Yz为主动极转角与标准合闸位相差角度;Yc为从动极转角与标准合闸位相差角度;x为操作杆转动角度,范围在160°~180°。
根据式(7),可在判断为合闸不到位缺陷时,通过所测操作杆转动角度,换算输出触头触指间距离,与标准中要求的三相不同期量(如GW4-126A型要求±1°)对比,可直观体现合闸位是否超标及严重程度。
2)操作杆转动角度与触头触指间距离映射
从仿真软件中导出触指弧线段圆心与触头弧线段圆心坐标参数,求取两圆心间距离后,减去触指弧线段半径与触头弧线段半径,获得两圆弧间距离。
假设触指弧线段圆心坐标为(x1, y1, z1),半径为r1,触头弧线段圆心坐标为(x2, y2, z2),半径为r2,则两圆心间距离D为
 (8)
(8)两弧线间距离d为
 (9)
(9)由于针对的是三相不同期故障,因此选取操作杆转动角度为啮合前10°,范围为125°~135.5°,以操作杆转动角度为横坐标,两弧线间距离d为纵坐标,绘制的曲线如图21所示。
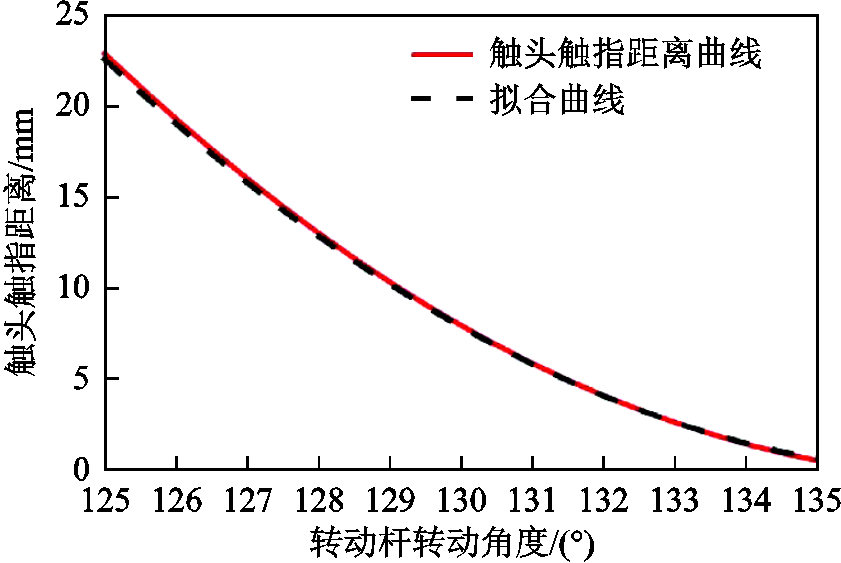
图21 SPMSG等效电路和空间矢量图
Fig.21 The equivalent circuit and space vector diagram of SPMSG
采用多项式进行拟合,经尝试发现多项式最高次为2次项可满足拟合误差小于0.1要求,最终拟合获得的主、从动极误差角度为
 (10)
(10)式中,Y为触头触指间距离;x为操作杆转动角度,范围在125°~135.5°。
根据上述表达式,可在判断为三相不同期缺陷时,通过所测操作杆转动角度,换算输出触头触指间距离,与标准中要求的三相不同期量(如110kV要求10mm)对比,可直观体现三相不同期是否超标及严重程度。
本文基于刚柔耦合动力学仿真和操作力矩-转角检测装置的检测结果,提出一种基于操作力矩的隔离开关典型机械缺陷智能诊断方法,能有效检测诊断隔离开关机械状态并输出判断故障程度的物理量,获得的主要结论包括:
1)仿真与试验结果一致表明,GW4型隔离开关正常状态下合闸力矩波形表现为一小一大两个典型波峰。
2)通过典型机械缺陷模拟试验力矩波形可知:合闸不到位缺陷主要影响合闸角度;卡涩缺陷使力矩值变大,合闸前力矩波形相似度和包络线峭度也随之改变,但角度相关特征量不变;三相不同期缺陷影响包络线峭度、力矩最大值及最大值出现时间和啮合角度。
3)本文建立的隔离开关典型机械缺陷智能诊断系统,以啮合前力矩的平均值、啮合角度和停止角度作为特征量输入,可判断隔离开关正常、合闸不到位、三相不同期、卡涩四种机械状态,当诊断为卡涩时,输出卡涩级别;当诊断为三相不同期时,输出三相不同期量;当诊断为合闸不到位时,输出与标准合闸角度差值。
参考文献
[1]国家电网有限公司设备管理部. 构建基于“大云物移智”等现代信息通信技术的智能运检体系[J]. 电力设备管理, 2019(4): 26-27. Equipment management department of State Grid Corporation of China. Intelligent operation and inspection system based on modern information and communication technology such as "big-cloud-thing-moving-intelligence"[J]. Electric Power Equipment Management, 2019(4): 26-27.
[2]董洪达,冯世涛,黄涛,等. 高压隔离开关典型机械故障与检测方法分析[J]. 电工技术, 2018(7): 36-38, 42. Dong Hongda, Feng Shitao, Huang Tao. Analysis of detection methods and typical mechanical faults of high voltage disconnectors[J]. Electric Engineering, 2018(7): 36-38, 42.
[3]马宏明,周涛涛,彭诗怡,等. GW4隔离开关机械故障仿真与诊断技术[J]. 电工技术学报, 2019, 34(增刊2): 501-508. Ma Hongming, Zhou Taotao, Peng Shiyi, et al. Research on mechanical fault simulation and diagnosis technology of GW4 disconnector[J]. Transactions of China Electrotechnical Society, 2019, 34(S2): 501-508.
[4]姜才海. 高压隔离开关设备完善化设计与改进[D].北京: 华北电力大学, 2015.
[5]储燎原. 高压隔离开关若干关键部件腐蚀与防护试验研究[D]. 杭州: 浙江大学, 2017.
[6]国家能源局. 隔离开关及接地开关状态评价导则: DL/T1701-2017[S]. 北京: 中国电力出版社, 2018.
[7]王黎明,何建明. 电动隔离开关机械故障状态监测的设想[J]. 浙江电力, 2006, 25(3): 56-59. Wang Liming, He Jianming. Mechanical fault monitoring of electrical driving disconnector[J]. Zhejiang Electric Power, 2006, 25(3): 56-59.
[8]马宏明,周涛涛,彭诗怡,等. 基于操作杆转角信号的隔离开关机械故障诊断技术研究[J]. 高压电器, 2018, 54(8): 33-39, 47. Ma Hongming, Zhou Taotao, Peng Shiyi,et al. Research on mechanical fault diagnosis technology of disconnector based on operation corner angle signal[J]. High Voltage Apparatus, 2018, 54(8): 33-39, 47.
[9]李少华,张文涛,宋亚凯,等. 基于高压隔离开关振动信号的故障诊断方法分析[J]. 内蒙古电力技术, 2018, 36(1): 89-92. Li Shaohua, Zhang Wentao, Song Yakai, et al. Analysis of fault diagnosis method based on vibration signal of high-voltage disconnector[J]. Inner Mongolia Electric Power, 2018, 36(1): 89-92.
[10]张一茗,李少华,陈士刚,等. 基于ReliefF特征量优化及BP神经网络识别的高压隔离开关故障类型与位置诊断方法[J]. 高压电器, 2018, 54(2): 12-19. Zhang Yiming, Li Shaohua, Chen Shigang, et al. Fault type and position diagnosis method of high-voltage disconnectors based on ReliefF characteristic quantity optimization and BP neural network recognition[J]. High Voltage Apparatus, 2018, 54(2): 12-19.
[11]Jia Yongyong, Wu Bang, Sun Shanyuan, et al. Research of the vibration characteristics in GIS disconnector under different contact state[C]//2018 IEEE International Conference on High Voltage Engineering and Application (ICHVE), ATHENS, Greece, 2018: 1-4.
[12]Bian Chao, Zhou Yuqi, Guan Weimin, et al. Study on the closing state of high voltage disconnectors based on the modal analysis[C]//2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 2017: 1-5.
[13]杨秋玉,阮江军,黄道春,等. 基于振动信号时频图像识别的高压断路器分闸缓冲器状态评估[J]. 电工技术学报, 2019, 34(19): 4048-4057. Yang Qiuyu, Ruan Jiangjun, Huang Daochun, et al. Opening damper condition evaluation based on vibration time-frequency images for high-voltage circuit breakers[J]. Transactions of China Electrotechnical Society, 2019, 34(19): 4048-4057.
[14]孙曙光, 李勤, 杜太行, 等. 基于一维卷积神经网络的低压万能式断路器附件故障诊断[J]. 电工技术学报, 2020, 35(12): 2562-2573. Sun Shuguang, Li Qin, Du Taihang, et al. Fault diagnosis of accessories for the low voltage conventional circuit breaker based on one-dimensional convolutional neural network[J]. Transactions of China Electrotechnical Society, 2020, 35(12): 2562-2573.
[15]杨秋玉,阮江军,黄道春,等. 基于VMD-Hilbert边际谱能量熵和SVM的高压断路器机械故障诊断[J]. 电机与控制学报, 2020, 24(3): 11-19. Yang Qiuyu, Ruan Jiangjun, Huang Daochun, et al. Mechanical fault diagnosis for high voltage circuit breakers based on VMD-Hilbert marginal spectrum energy entropy and SVM[J]. Electric Machines and Control, 2020, 24(3): 11-19.
[16]张丽萍,石敦义,缪希仁. 低压断路器振动特性分析及其故障诊断研究[J]. 电机与控制学报, 2016, 20(10): 82. Zhang Liping, Shi Dunyi, Miao Xiren. Research on vibration signal feature analysis and its fault diagnosis[J]. Electric Machines and Control, 2016, 20(10): 82.
[17]陈士刚,关永刚,张小青,等. 不完备故障类别下基于Multi-SVDD的高压隔离开关故障诊断方法[J]. 电工技术学报, 2018, 33(11): 2439-2447. Chen Shigang, Guan Yonggang, Zhang Xiaoqing, et al. Diagnosis method of high voltage isolating switch fault based on Multi-SVDD under incomplete fault type[J]. Transactions of China Electrotechnical Society, 2018, 33(11): 2439-2447.
[18]刘贤杰,高世伟,胡曙明.防止高压电动隔离开关支柱绝缘子断裂措施新探[J]. 山西电力, 2013(3): 59-61. Liu Xianjie, Gao Shiwei, Hu Shuming. New measures to avoid the fracture of high voltage post insulator of electric isolating switch[J]. Shanxi Electric Power, 2013(3): 59-61.
[19]邱志斌,阮江军,黄道春,等.高压隔离开关机械故障分析及诊断技术综述[J].高压电器, 2015, 51(8): 171-179. Qiu Zhibin, Ruan Jiangjun, Huang Daochun, et al. Mechanical faults analysis of high voltage disconnectors and review of diagnosis technology[J]. High Voltage Apparatus, 2015, 51(8): 171-179.
[20]Qiu Zhibin, Ruan Jiangjun, Huang Daochun, et al. Mechanical fault diagnosis of high voltage outdoor disconnector based on motor current signal analysis[C]//2014 International Conference on Power System Technology, Chengdu, 2014: 1193-1198.
[21]黄聿琛,阮江军,邱志斌,等.隔离开关操动机构电机输出轴扭矩和电流关系的研究[J].高压电器, 2015, 51(6): 139-144. Huang Yuchen, Ruan Jiangjun, Qiu Zhibin, et al. Study on the relationship between motor output shaft torque and motor current of disconnector operation mechanism[J]. High Voltage Apparatus, 2015, 51(6): 139-144.
[22]Peng Tao, Lü Chaohui, Du Yi, et al. Mechanical fault diagnosis of high voltage disconnector based on motor current detection[C]//2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China: 1726-1729.
[23]杨文英,刘兰香,刘洋,等.考虑碰撞弹跳的接触器动力学模型建立及其弹跳特性影响因素分析[J].电工技术学报, 2019, 34(9): 1900-1911. Yang Wenying, Liu Lanxiang, Liu Yang, et al. Establishing of contactor dynamic model considering collision bounce and analysis of influencing factors of bounce characteristics[J]. Transactions of China Electrotechnical Society, 2019, 34(9): 1900-1911.
[24]王栋.隔离开关智能测试装置的设计[D]. 上海: 上海交通大学, 2014.
[25]刘春来,周涛涛,马宏明,等.基于力矩与转角检测的GW4-126型隔离开关典型机械故障诊断[J]. 高压电器, 2020, 56(2): 232-239. Liu Chunlai, Zhou Taotao, Ma Hongming, et al. Typical mechanical fault diagnosis of GW4-126 disconnector based on torque and angle detection[J]. High Voltage Apparatus, 2020, 56(2): 232-239.
[26]赵科, 杨景刚, 马速良, 等. 基于神经网络集成模型在高压断路器机械故障诊断中的应用[J]. 高压电器, 2018, 54(7): 217-223. Zhao Ke, Yang Jinggang, Ma Suliang, et al. Application of neural network ensemble model in mechanical fault identification of high voltage circuit breaker[J]. High Voltage Apparatus, 2018, 54(7): 217-223.
[27]程学珍, 朱晓林, 杜彦镔, 等. 基于神经模糊Petri网的高压断路器故障诊断研究[J]. 电工技术学报, 2018, 33(11): 2535-2544. Cheng Xuezhen, Zhu Xiaolin, Du Yanbin, et al. High voltage circuit breaker fault diagnosis based on neural fuzzy Petri nets[J]. Transactions of China Electrotechnical Society, 2018, 33(11): 2535-2544.
[28]杨秋玉, 阮江军, 张灿, 等. 基于定量递归分析的高压断路器机械缺陷辨识及应用[J]. 电工技术学报, 2020, 35(18): 3848-3859. Yang Qiuyu, Ruan Jiangjun, Zhang Can, et al. Study and application of mechanical defect identification for high-voltage circuit breakers using recurrence quantification analysis[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3848-3859.
Intelligent Diagnosis Technology of Mechanical Defects of High Voltage Disconnector
Abstract As high voltage equipment with the largest number and most failures, disconnector still judged by the backward traditional maintenance methods. This paper aims to propose a convenient and reliable fault diagnosis method for disconnector. Based on the consistent results of rigid-flexible coupling dynamic simulation and torque detection experiment, the driving torque is proved closely related to the states of disconnector, and three characteristics extracted from the driving torque wave was chosen as the input of the neural network model, which can identify four typical status of disconnector intelligently. And the neural network model was optimized to output more information about its degree, which can provide more useful reference for the fault diagnosis of disconnector.
keywords:Disconnectors, fault diagnosis, dynamic simulation, neural network
中图分类号:TM732
DOI:10.19595/j.cnki.1000-6753.tces.200258
国家电网公司科技项目资助(521820180019)。
收稿日期 2020-03-12
改稿日期 2020-08-24
彭诗怡 女,1994年生,硕士,助理工程师,研究方向为开关设备运行管理及状态评价等。E-mail:524409117@qq.com(通信作者)
刘 衍 男,1983年生,硕士,高级工程师,研究方向为开关设备运行管理及过电压。E-mail:lywhu096@163.com
(编辑 赫蕾)