 (1)
(1)摘要 为了降低传统内置式永磁同步电机(IPMSM)低速无位置传感器控制系统中的铜耗,该文提出一种基于虚拟信号和高频脉振信号注入的最大转矩电流比(MTPA)无位置控制技术,以提高电机的转矩输出能力和系统效率。为避免两种控制算法相互干扰,与传统虚拟信号注入MTPA控制策略不同,该文提出的方法在估计的dq轴上注入直流信号,通过功率计算来跟踪MTPA工作点。该MTPA策略不会引起额外的损耗且不依赖于电机参数。与此同时,由于注入信号为直流信号,无位置传感器控制精度并不会受到影响。实验结果表明,所提方法在不同负载转矩、不同转速等工况下,能够在准确追踪MTPA工作点的同时准确地在线估计转子位置。
关键词:内置式永磁同步电机 高频脉振信号注入法 无位置控制策略 最大转矩电流比控制 虚拟信号注入法
内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor, IPMSM)具有高转矩密度、高效率、体积小等优点,已广泛应用于电动汽车、航空航天等高端领域[1]。传统控制方法需要通过机械传感器获得转子位置及转速信息,造成系统更加复杂、成本增加、可靠性降低等问题。为进一步拓宽IPMSM的应用领域,无位置传感器控制技术已经成为当前研究的热点[2-4]。
IPMSM在中高速范围通常采用反电动势法获得转子位置信息[5-7]。而在零低速时,由于电机反电动势过小,不易准确获取转子位置信息,因此常采用高频脉振信号注入法实现无位置传感器控制[8-9]。高频脉振信号注入法利用电机的凸极效应,向估计d轴注入高频电压信号,从高频电流中提取出零低速下的转子位置信息。该方法易于实现,具有较高的工程应用价值。为了简化控制,无位置传感器控制技术通常基于id=0控制。但是,为了充分利用IPMSM的磁阻转矩,提升电机的转矩输出能力和系统效率,更应采取最大转矩电流比控制(Maximum Torque Per Ampere, MTPA)。
为了实现MTPA控制,许多学者进行了相关的研究,主要分为两种:一种是离线计算法,包括公式法和查表法[10-12]。公式法是将电机参数视为常数,通过对转矩方程求取关于定子电流矢量角的导数并令其等于零,从而计算出MTPA控制时所对应的最佳电流矢量角,但电机的电感、磁链等参数会随工况的不同而发生变化,所以这种方法精度较差且计算量较大。查表法主要将多次实验或者有限元仿真得到的不同转矩下最优dq轴电流绘制成表,用在线查表的方式给定最优的dq电流值,但是这需要进行多次离线测试且运行效果会受到实际工况的影响。另一种是在线估计法,包括极值搜索法和信号注入法。极值搜索法是通过比较不同电流矢量角下的定子电流幅值,寻找最小电流幅值对应的电流矢量角来实现MTPA控制[13-14],但这类方法收敛速度较慢导致动态响应能力较差。信号注入法通过注入高频信号至电流、磁链或电压矢量中,分析响应信号实现MTPA控制。但由于这类方法将信号注入到电机中,所以不可避免地会引起额外的转矩脉动和损耗增加[15-17]。文献[18-20]提出一种虚拟信号注入的方法,通过向电流矢量角中注入高频正弦或者方波信号,构建注入信号后的电机模型实现MTPA控制。此类方法不依赖电机参数且并未将高频信号注入到电机中,避免了由信号注入带来的损耗增加等问题。
为提升控制系统的可靠性和效率,已有一些学者将MTPA控制与无位置传感器控制相结合[21-23]。文献[21]中,设计了基于反电动势的转矩观测器,实现了MTPA控制。利用包含转子位置信息的反电动势,得到转子位置信息。但是,该方法需要准确获取电机的参数,并且只适用于中高速范围。文献[22]中,定义一个虚拟q轴电感值,用高频虚拟信号注入的方式追踪虚拟q轴电感值的变化,同时实现追踪MTPA轨迹和无位置传感器控制。但是,其无位置传感器控制是通过基于反电动势的方法,所以更适用于中高速范围。文献[23]中,将虚拟信号注入到基波平面追踪MTPA轨迹,高频脉振电压信号注入谐波平面实现无位置传感器控制,在五相电机上实现无位置传感器MTPA控制。由于基波平面与谐波平面互相解耦,所以注入的两种高频信号不会互相干扰,但却只适用于多相电机。
目前,虚拟信号注入MTPA控制策略注入的高频信号主要有两种形式:正弦信号和方波信号。对于正弦信号,通常需要使用带通滤波器和低通滤波器获取dTe/db。如果将其直接与高频脉振注入无位置控制结合,较多的滤波器会进一步降低整个控制系统带宽,影响系统动态响应能力。对于方波信号,省去滤波器的使用,但会使得到的电流矢量角中包含高频方波信号。对于高频脉振信号注入的无位置传感器控制,不可避免地要向控制系统中注入高频信号,这会使得d轴上存在两种高频信号,从而影响位置信号的提取。
为克服传统虚拟信号注入MTPA控制策略与高频脉振无位置控制策略结合的不足,本文提出一种基于直流虚拟信号注入的MTPA控制策略。在高频脉振信号注入无位置控制策略的基础上,为避免注入的两种信号相互干扰,通过分别向估计dq轴上注入直流信号,计算出相应的功率追踪MTPA工作点,来提升系统效率。两种控制算法都是通过信号注入的方式对电机参数扰动具有一定的鲁棒性。最后搭建IPMSM实验系统,验证该方法的可行性与有效性。
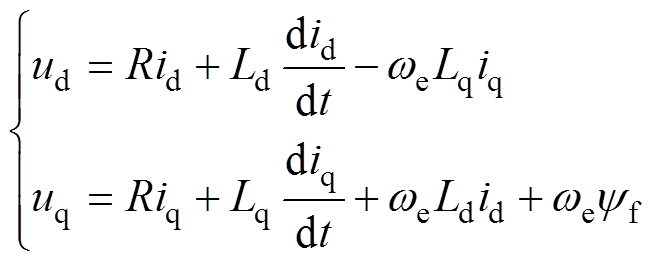
IPMSM在dq同步旋转坐标系下电压方程可表示为
(1)式中,ud和uq分别为电机的d、q坐标系下电压;id和iq分别为d、q坐标系下电流;Ld和Lq分别为d、q坐标系下电感;yf为永磁磁链幅值;R为定子电阻;we为电机的电角速度。
当电机运行于零低速区且注入的信号频率远大于电机的旋转角频率时,反电动势、定子电阻上的压降可以忽略,则IPMSM高频电压模型可简化为
 (2)
(2)式中,下标“h”为高频分量。
在无位置传感器控制系统中,由于转子位置信息无法通过测量直接获取,坐标变换无法实现。所以,假设估计dq轴坐标系,估计dq坐标系与实际dq坐标系关系如图1所示。

图1 估计dq坐标系和实际dq坐标系
Fig.1 Estimated dq frame and actual dqframe
通常,向估计的d轴注入高频电压为Uhcos(wht),得到估计dq轴下高频电流响应为
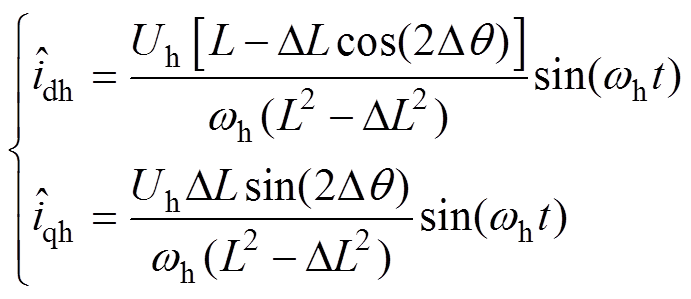 (3)
(3)式中,上标“ ”为估计dq坐标系下的物理量;Uh和wh分别为注入高频信号的幅值和频率;
”为估计dq坐标系下的物理量;Uh和wh分别为注入高频信号的幅值和频率; 为估计位置误差,
为估计位置误差, ;L、DL为电感参数,其表达式分别为
;L、DL为电感参数,其表达式分别为
 (4)
(4)
由式(3)可知,估计q轴高频电流响应中含有转子位置误差信息Dq,只要调节 至零,就可使位置的估计值
至零,就可使位置的估计值 与实际值qe相等,从而实现无位置传感器控制。
与实际值qe相等,从而实现无位置传感器控制。
图2为位置和速度观测器。由图可知, 轴电流先通过带通滤波器得到高频电流幅值,然后将与调制信号sin(wht)相乘,最后将其通过低通滤波器滤除所注入的高频信号。位置误差信号f(Dq)提取的数学过程可表示为
轴电流先通过带通滤波器得到高频电流幅值,然后将与调制信号sin(wht)相乘,最后将其通过低通滤波器滤除所注入的高频信号。位置误差信号f(Dq)提取的数学过程可表示为
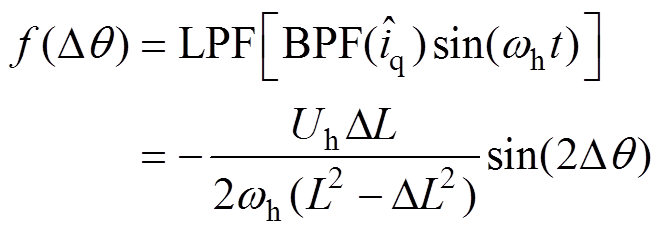 (5)
(5)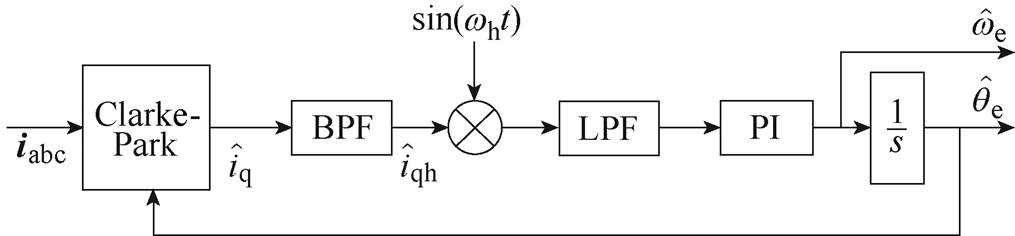
图2 位置和速度观测器
Fig.2 Position and speed observer
由式(5)可知,通过PI调节器将f(Dq)调节至零,使估计位置与实际位置相等,可以获得转子转速和位置估计值,这就是高频脉振信号注入法的基本原理。
IPMSM在dq轴同步坐标系下的转矩方程可以表示为
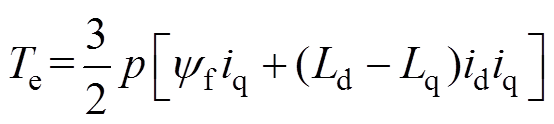 (6)
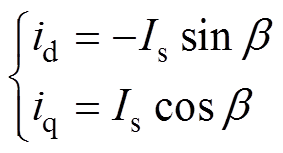
(6)其中
 (7)
(7)
式中,Is为定子电流幅值;b 为定子电流矢量角;p为电机极对数。由式(6)和式(7)可知,在满足稳态输出转矩的条件下,存在唯一的b,使定子电流幅值最小,即MTPA工作点。令转矩表达式对电流矢量角的导数等于零,可以求得电机运行在MTPA工作点时的最佳电流矢量角。

 (8)
(8)
根据式(8)求得最佳电流矢量角为
 (9)
(9)理论上,通过式(9)和电机参数的标称值,可以计算出最佳电流矢量角。但由于电机电感、磁链等参数会随着工况的改变而改变,此方法无法保证MTPA点追踪的精度。
IPMSM的输入功率可以表示为
 (10)
(10)在恒转矩区,由于转速较低,铁耗可以忽略,式(10)可以进一步写成
 (11)
(11)式中,Pcopper为电机铜耗;Pout为电机的输出功率。
由式(1)知,在稳态下,电压方程可表示为
 (12)
(12)将式(12)代入式(11),则Pout可等效为
 (13)
(13)
向估计d轴注入直流偏置量A,注入后的电机输出功率为
 (14)
(14)同理,向估计q轴注入直流偏置量A后的电机输出功率为
 (15)
(15)
dTe/db 可以进一步表示为
 (16)
(16)
根据式(6),可得Te对id和iq的偏导数为
 (17)
(17) (18)
(18)
则由Pout、Pdout、Pqout表达式可得
 (19)
(19) (20)
(20)
根据式(16)、式(19)和式(20),可令
 (21)
(21)从式(21)可以看出,当系统处于稳态时,dTe/db与P1成正比,即要使dTe/db =0,只需令P1=0。由式(12)可得
 (22)
(22)
将式(22)代入式(13)~式(15),Pout、Pdout、Pqout还可以表示为
 (23)
(23) (24)
(24)
 (25)
(25)
根据以上分析,通过式(21)、式(23)~式(25)可获取所需要的信号即dTe/db。由于定子电阻阻值很小,并且不随电流变化。同时,由于永磁体的存在使得d轴磁路在空载时就已接近饱和,所以当电流变化时,d轴电感变化范围比q轴电感要小,并且可以将注入虚拟信号幅值选取一个较小的数值进一步减小d轴电感变化带来的影响。所以可以将定子电阻和d轴电感视为常数。
图3是虚拟信号注入MTPA控制框图。其中,ud和uq为电流环的输出, 和
和 是根据估计位置角和ABC三相电流通过坐标变换得到。为了消除注入高频电压信号和逆变器动作引入的噪声干扰,ud、uq、id、iq需通过低通滤波器。将式(21)计算得到的P1通过PI调节器调节至零,得到电流矢量角的给定值。低通滤波器滤波过后的ud、uq、id、iq只是用于算出电流矢量角的给定值,与无位置控制算法和SVPWM算法无关,所以不会影响系统性能。
是根据估计位置角和ABC三相电流通过坐标变换得到。为了消除注入高频电压信号和逆变器动作引入的噪声干扰,ud、uq、id、iq需通过低通滤波器。将式(21)计算得到的P1通过PI调节器调节至零,得到电流矢量角的给定值。低通滤波器滤波过后的ud、uq、id、iq只是用于算出电流矢量角的给定值,与无位置控制算法和SVPWM算法无关,所以不会影响系统性能。
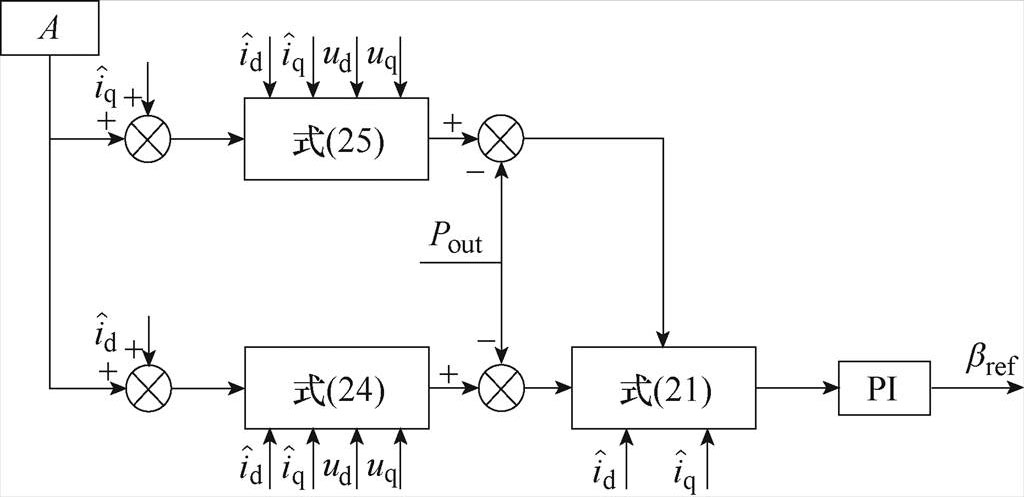
图3 虚拟信号注入MTPA控制框图
Fig.3 Signal processing block of the MTPA control
综上分析,基于虚拟信号与高频脉振信号注入的无位置传感器永磁同步电机的MTPA控制策略框图如图4所示。该控制系统是基于传统的速度环与电流环双闭环控制,速度环输出为定子电流幅值的大小,定子电流矢量角由MTPA模块给定。因为,MTPA模块中注入的是直流信号且无位置传感器估计模块只针对注入的高频信号进行处理,所以MTPA模块不会对位置估计产生影响。
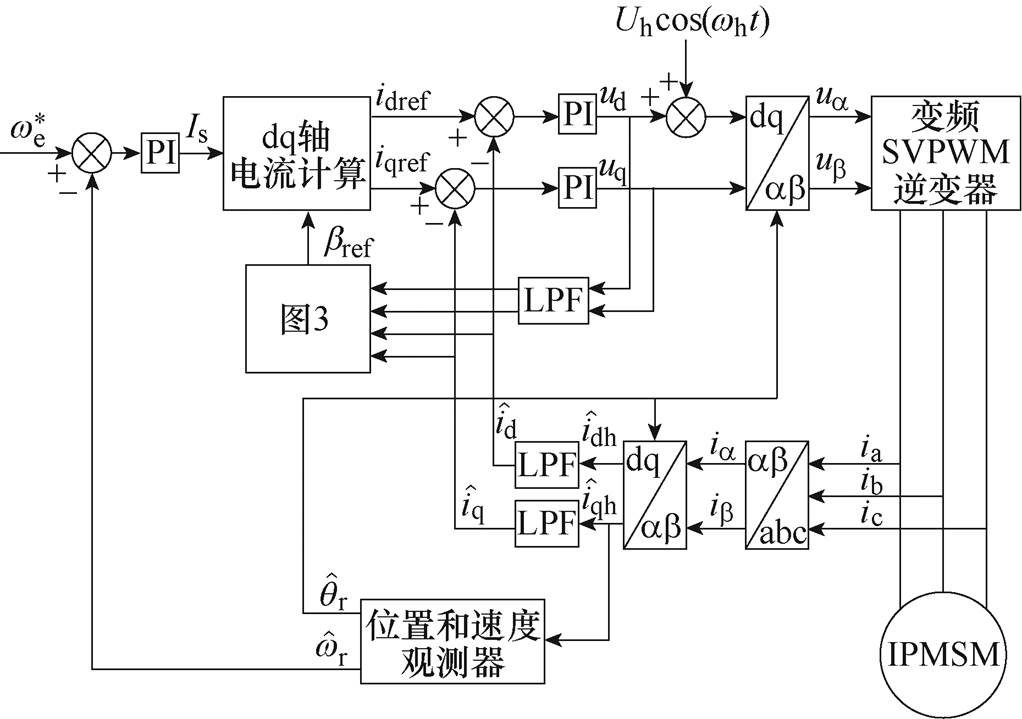
图4 所提算法的整体控制框图
Fig.4 Control block diagram of proposed method
为了验证所提控制方法的可行性,搭建了如图5所示的三相IPMSM控制系统实验平台。其中,直流电机提供负载,驱动器控制芯片型号为TI公司TMS320F28377。系统中通过光电编码器获得电机的实际转子位置信号,该信号不参与系统控制,仅用于对比验证。表1为实验中内置式永磁同步电机参数。在实验中,实验电压为50V,注入的高频电压信号频率为800Hz,幅值为7V。
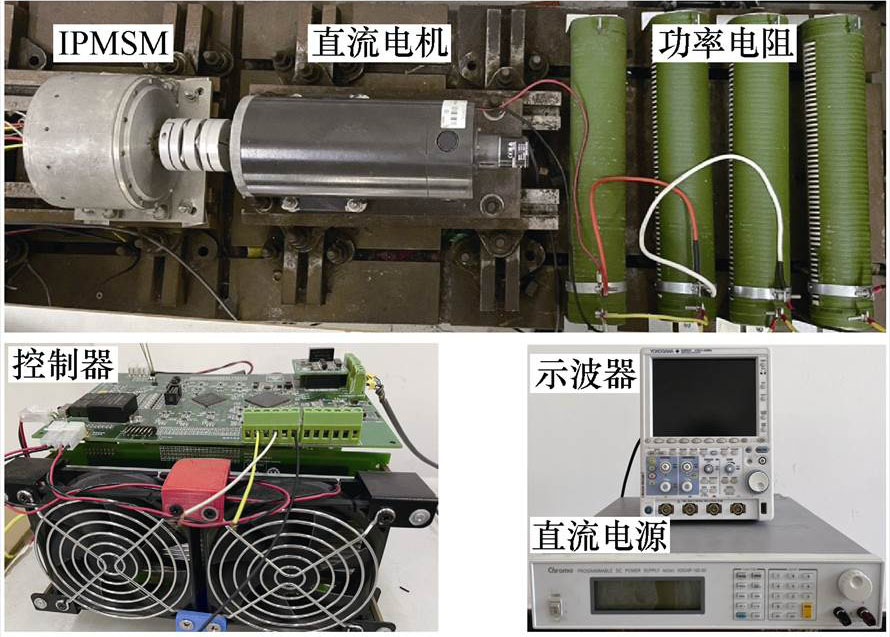
图5 IPMSM控制系统实验平台
Fig.5 Experiment platform of IPMSM control system
表1 内置式永磁同步电机参数
Tab.1 The parameters of prototype IPMSM

参 数数 值 相数3 极对数4 相电阻/mW81.5 d轴电感/mH1 q轴电感/mH2.4 永磁体磁链幅值/Wb0.07 额定转速/(r/min)1 500 额定功率/kW2
首先,为了验证MTPA点追踪精度不受无位置控制注入的高频信号的影响,当电机运行于150r/min、负载转矩为6N·m时,在2s处开始注入高频信号,其定子电流矢量角的实验结果如图6所示。由实验结果可以看出,在注入高频信号后,定子电流矢量角不会发生变化,说明所提方法不受注入高频信号的影响。

图6 高频信号注入后的电流矢量角
Fig.6 Current angle after high-frequency signal injection
注入虚拟信号幅值A应选取较小的值以降低d轴电感变化带来的影响,本文取A=0.5。为了验证A较小时,A的变化对MTPA追踪精度没有影响,当电机转速为150r/min,负载转矩为5N·m时,在4s时将注入的虚拟信号幅值A由0.5变成2,其估算位置误差和电流矢量角如图7所示。从实验结果可见,虚拟信号幅值A对MTPA追踪精度和转子位置估计值没有影响。
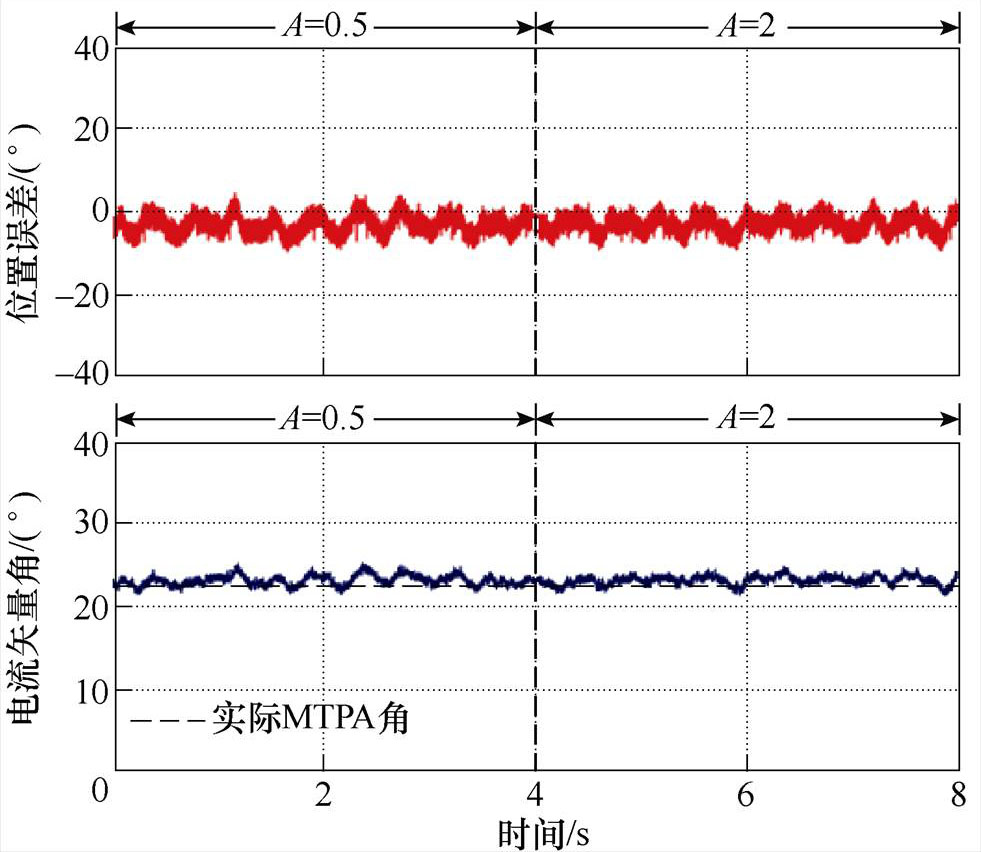
图7 虚拟信号幅值变化时的位置误差与电流矢量角
Fig.7 Position error and current angle response to the amplitude of the virtual signal injection change
为了验证算法的鲁棒性,进行了变参数实验。首先电机以准确参数运行,转速为150r/min,负载转矩为4N·m,1.5s时将算法中的定子电阻由81.5mW 变为100mW,3s时将d轴电感由1mH变为1.2mH,定子电流矢量角、位置误差和转速误差的实验结果如图8所示。由实验结果可以看出,算法中电机参数变化对算法没有影响,证明了提出算法有较好的鲁棒性。
为了验证MTPA算法的有效性,进行了将控制算法从id=0控制切换为MTPA控制的实验。实验中,电机转速为150r/min,负载转矩为4.5N·m,其结果如图9所示。由图9a和图9b可见,id=0控制时转子位置误差平均值为10°,转速误差平均值在5r/min。切换到MTPA控制时,转子位置估计会受到影响,这是由于id给定值的变化会使d轴电压改变,从而导致位置观测受到干扰,但转子位置误差的平均值仍为10°。由图9c可知,所提方法可以在无位置传感器控制下快速地追踪到MTPA点。由图9d、图9e可见,id=0控制切换为MTPA控制时,d轴电流由0A减小为-3.8A,q轴电流由10A减小为8.5A,电流幅值由10A减小至9.5A。说明所提方法可以同时实现无位置传感器控制和MTPA控制。
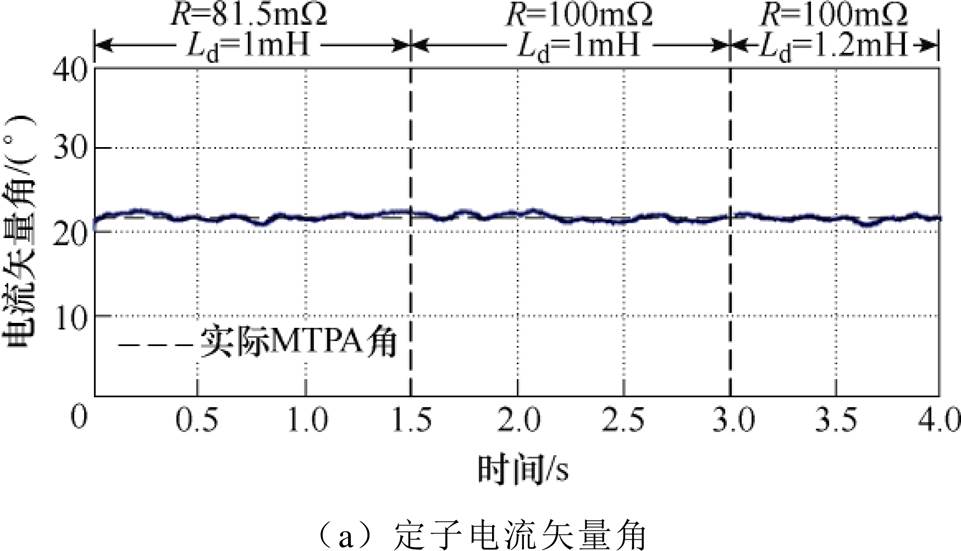
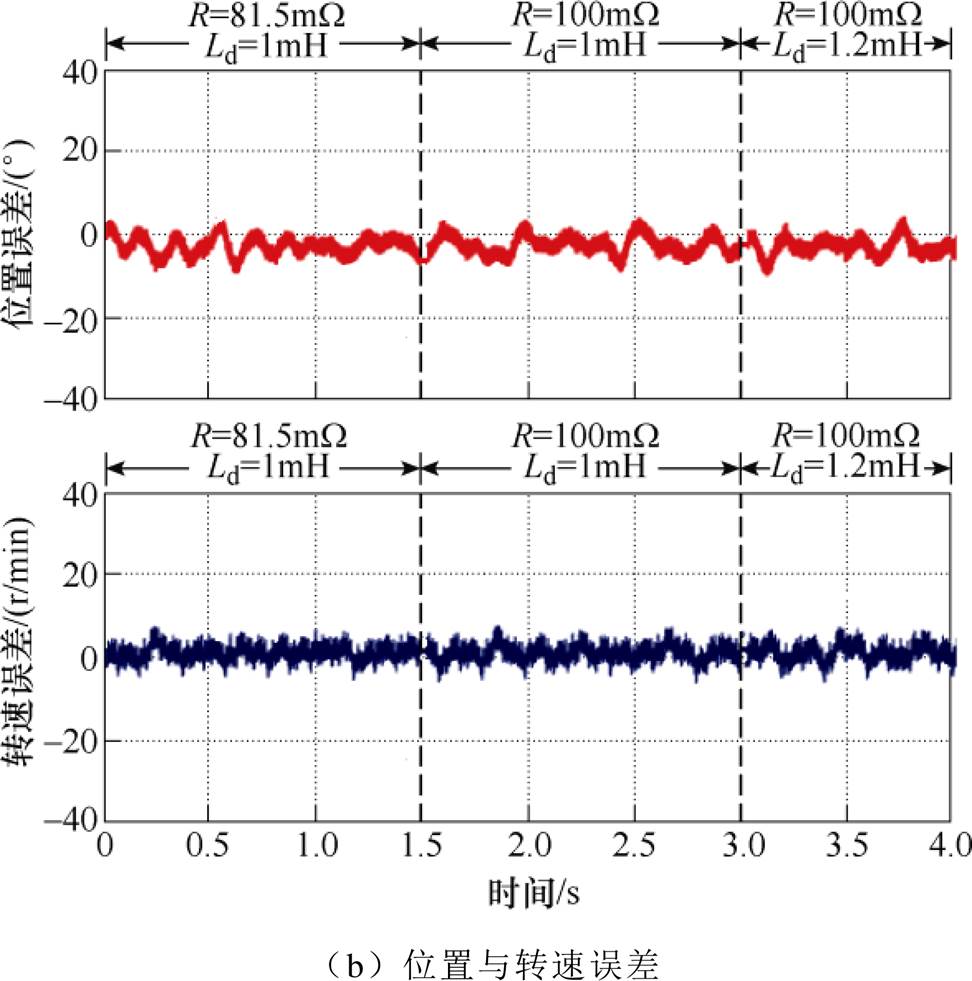
图8 电机参数幅值变化的实验结果
Fig.8 Results of the amplitudes of the motor parameter change
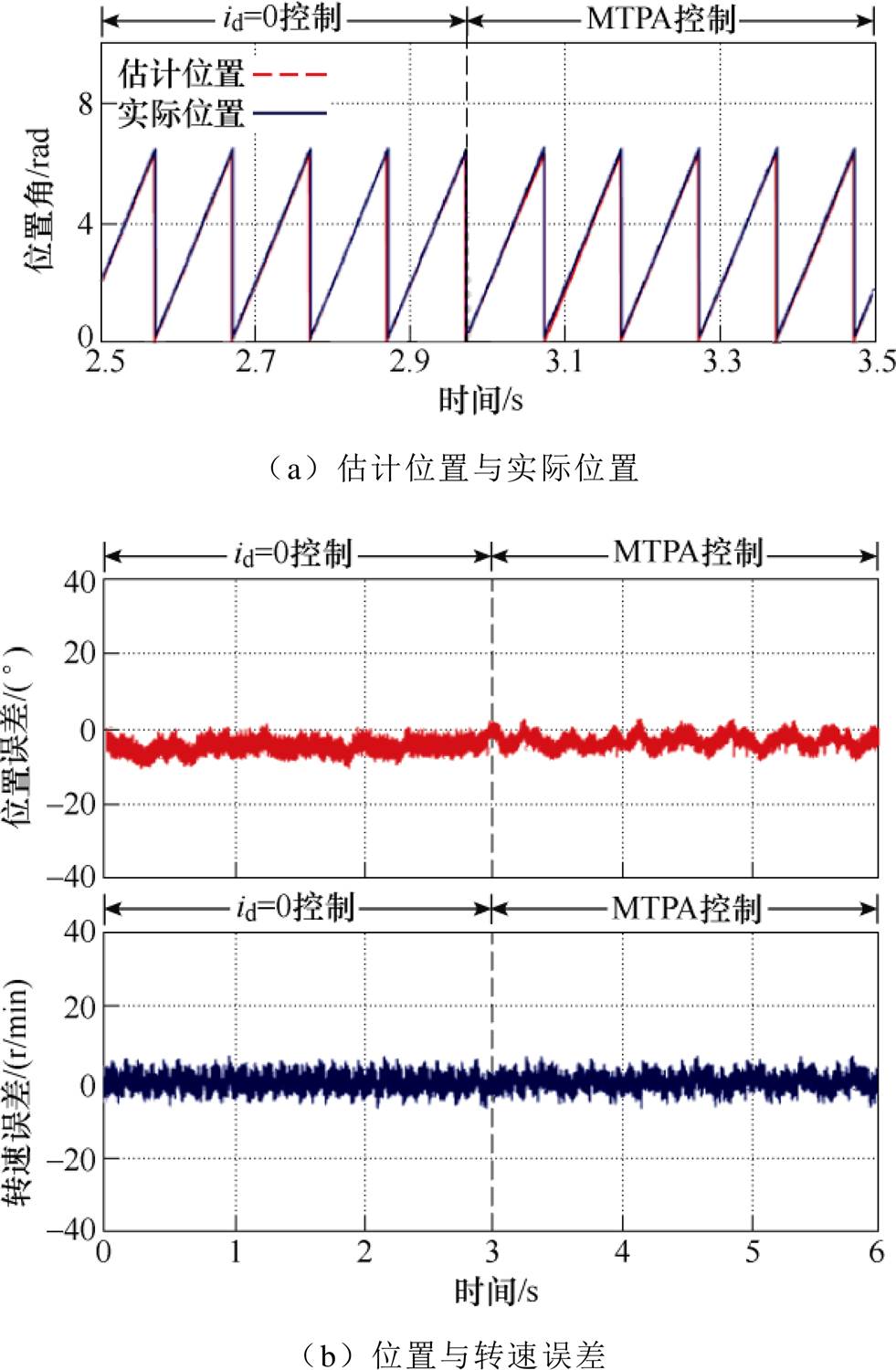
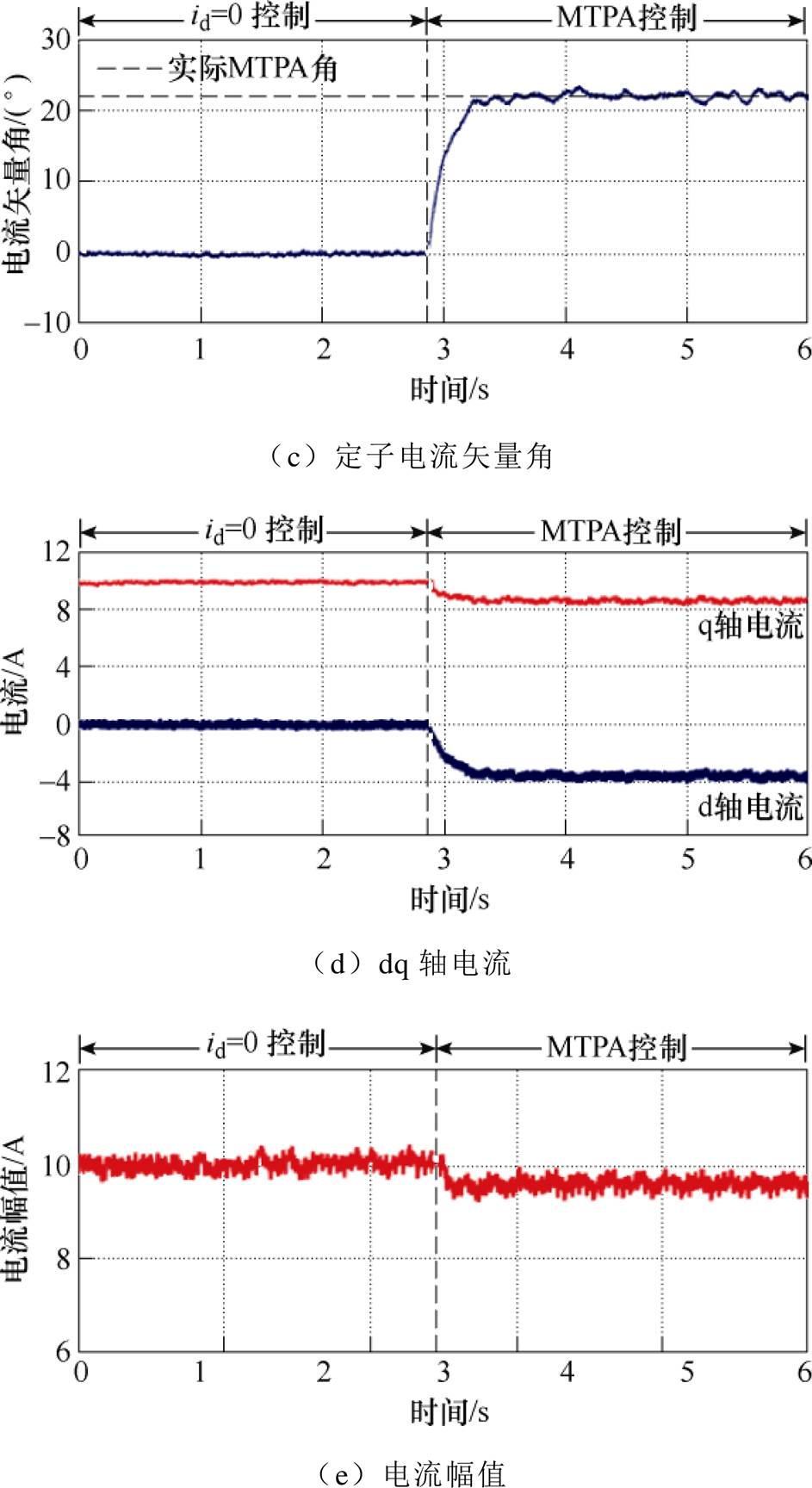
图9 id=0控制切换为MTPA控制的实验结果
Fig.9 Experiment results of id=0 control switch to MTPA control
为了验证所提方法的动态特性,进行了转速突变实验,实验中电机负载转矩为3N·m,转速为100r/min,转速由100r/min增加至150r/min,然后减少至100r/min,实验结果如图10所示。由于所搭平台负载为直流电机带功率电阻,所以转速升至150r/min时,负载转矩变为4N·m。由图10a和图10b可见,所提方法能快速响应负载转速变化,最大估计转子位置误差为21°,最大转速误差为24r/min,稳态时转子位置误差为12°,转速误差为5r/min。由于转速变化时负载也会变化,两个条件变化导致动态误差较大,同时本算法在追踪MTPA点时d轴电压会发生相应的变化,而高频无位置信号是注入到d轴电压上的,所以动态时会对无位置估算精度有所影响。由图10c~图10e可知,速度由100r/min增加至150r/min时,由于负载转矩由3N·m增加至4N·m,定子电流矢量角从18°变为 23°;速度由150r/min减少至100r/min时,负载转矩由4N·m减至3N·m,定子电流矢量角从23°减回至18°。d轴电流、q轴电流和电流幅值有相应的变化,且响应速度较快,说明所提方法可以在转速转矩变化时具有较好的动态响应能力与鲁棒性。

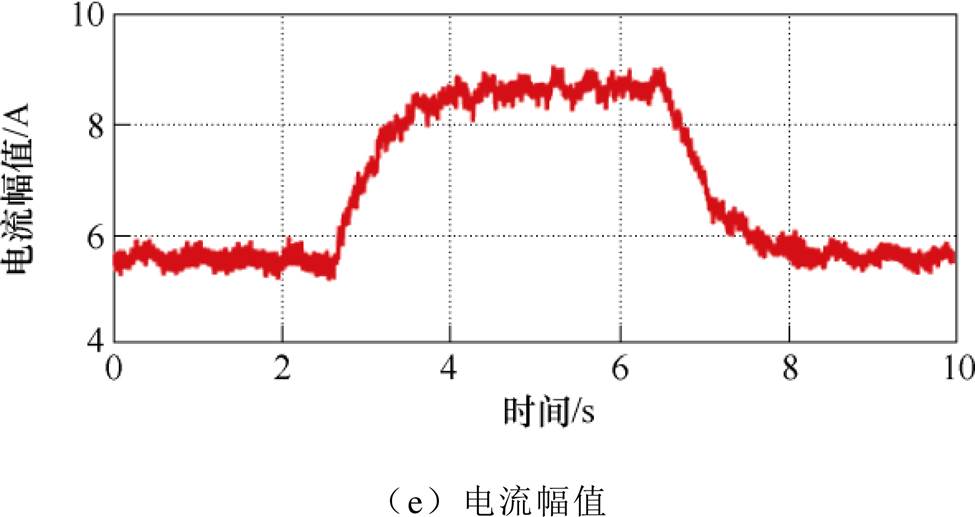
图10 转速转矩变化的实验结果
Fig.10 Experiment results of speed and torque change
本文提出一种基于虚拟信号和高频脉振信号的内置式永磁同步电机无位置传感器MTPA控制。该方法通过向估计d轴注入高频脉振电压信号获取转子位置信息,向估计dq轴电流注入直流信号追踪MTPA工作点。该虚拟信号注入方法不会产生额外的损耗,并且不依赖电机参数。与传统虚拟信号注入MTPA方法相比,所提方法不会影响无位置控制算法,同时注入的高频电压信号不会影响MTPA追踪精度。实验结果表明,该方法能够在不影响转子位置估计精度、不依赖电机参数的情况下,实现MTPA控制,并且在不同工况下具有较好的动态响应能力和鲁棒性。
参考文献
[1] 刘国海, 张嘉皓, 陈前. 基于空间电压矢量注入的频率可变型五相永磁同步电机最大转矩电流比控制[J]. 电工技术学报, 2020, 35(20): 4287-4295.
Liu Guohai, Zhang Jiahao, Chen Qian. Variable frequency maximum-torque-per-ampere control for five-phase permanent-magnet motor based on space voltage vector injection[J]. Transactions of China Electrotechnical Society, 2020, 35(20): 4287-4295.
[2] 李文真, 刘景林. 考虑磁路饱和及交叉耦合效应的内置式永磁同步电机无传感器优化方法[J]. 电工技术学报, 2020, 35(21): 4465-4474.
Li Wenzhen, Liu Jinglin. An improved sensorless method of IPMSM considering magnetic saturation and cross-coupling effect[J]. Transactions of China Electrotechnical Society, 2020, 35(21): 4465-4474.
[3] 杜博超, 崔淑梅, 宋立伟, 等. 一种基于变频电流信号的IPMSM无位置传感器高频注入电流噪声抑制方法[J]. 电工技术学报, 2020, 35(18): 3830-3837.
Du Bochao, Cui Shumei, Song Liwei, et al. A variable frequency current injection sensorless control strategy of IPMSM for audible noise reduction[J]. Transa- ctions of China Electrotechnical Society, 2020, 35(18): 3830-3837.
[4] Chen Qian, Shi Xuping, Xu Gaohong, et al. Torque calculation of five-phase synchronous reluctance motors with shifted-asymmetrical-salient-poles under saturation condition[J]. China Electrotechnical Society Transactions on Electrical Machines and Systems, 2020, 4(2): 105-113.
[5] 矫帅, 赵文祥, 邱先群, 等. 基于改进式反电动势法的直线游标永磁电机无位置传感器控制[J]. 电工技术学报, 2016, 31(增刊2): 236-242.
Jiao Shuai, Zhao Wenxiang, Qiu Xianqun, et al. Sensorless control of linear permanent magnet vernier motor based on improved stator back EMF[J]. Transactions of China Electrotechnical Society, 2016, 31(S2): 236-242.
[6] Zhang Xing, Li Haoyuan, Yang Shuying, et al. Improved initial rotor position estimation for PMSM drives based on HF pulsating voltage signal inje- ction[J]. IEEE Transactions on Industrial Electronics, 2018, 65(6): 4702-4713.
[7] Zhang Guoqiang, Wang Gaolin, Wang Huiying, et al. Pseudo random-frequency sinusoidal injection based sensorless IPMSM drives with tolerance for system delays[J]. IEEE Transactions on Power Electronics, 2019, 34(4): 3623-3632.
[8] 刘计龙, 付康壮, 麦志勤, 等. 基于双频陷波器的改进型高频脉振电压注入无位置传感器控制策略[J]. 中国电机工程学报, 2021, 41(2): 749-759.
Liu Jilong, Fu Kangzhuang, Mai Zhiqin, et al. Sensorless control strategy of improved HF pulsating voltage injection based on dual frequency notch filter[J]. Proceedings of the CSEE, 2021, 41(2): 749-759.
[9] 吴春, 陈科, 南余荣, 等. 考虑交叉饱和效应的变角度方波电压注入永磁同步电机无位置传感器控制[J]. 电工技术学报, 2020, 35(22): 4678-4687.
Wu Chun, Chen Ke, Nan Yurong, et al. Variable angle square-wave voltage injection for sensorless con- trol[J]. Transactions of China Electrotechnical Society, 2020, 35(22): 4678-4687.
[10] 徐心愿, 王云冲, 沈建新. 基于最大转矩电流比的同步磁阻电机DTC-SVM控制策略[J]. 电工技术学报, 2020, 35(2): 246-254.
Xu Xinyuan, Wang Yunchong, Shen Jianxin. Direct torque control-space vector modulation control strategy of synchronous reluctance motor based on maximum torque per-ampere[J]. Transactions of China Electrotechnical Society, 2020, 35(2): 246-254.
[11] Jung S Y, Hong J, Nam K. Current minimizing torque control of the IPMSM using ferrari’s method[J]. IEEE Transactions on Power Electronics, 2013, 28(12): 5603-5617.
[12] Li Ke, Wang Yi. Maximum torque per ampere (MTPA) control for IPMSM drives based on a variable- equivalent-parameter MTPA control law[J]. IEEE Transactions on Power Electronics, 2019, 34(7): 5402-5410.
[13] Liu Qian, Hameyer K. High-performance adaptive torque control for an IPMSM with real-time MTPA operation[J]. IEEE Transactions on Energy Conversion, 2017, 32(2): 571-581.
[14] Wang Gaolin, Li Zhuomin, Zhang Guoqiang, et al. Quadrature PLL-based high-order sliding-mode observer for IPMSM sensorless control with online MTPA control strategy[J]. IEEE Transactions on Energy Conversion, 2013, 28(1): 221-224.
[15] Liu Guohai, Wang Jian, Zhao Wenxiang, et al. A novel MTPA control strategy for IPMSM drives by space vector signal injection[J]. IEEE Transactions on Industrial Electronics, 2017, 64(12): 9243-9252.
[16] Li Ke, Wang Yi. Maximum torque per ampere (MTPA) control for IPMSM drives using signal injection and an MTPA control law[J]. IEEE Transactions on Industrial Informatics, 2019, 15(10): 5588-5598.
[17] Xia Jinhui, Guo Yuanbo, Li Ze, et al. Step-signal- injection-based robust MTPA operation strategy for interior permanent magnet synchronous machines[J]. IEEE Transactions on Energy Conversion, 2019, 34(4): 2052-2061.
[18] Sun Tianfu, Wang Jiabin, Chen Xiao. Maximum torque per ampere (MTPA) control for interior permanent magnet synchronous machine drives based on virtual signal injection[J]. IEEE Transactions on Power Electronics, 2015, 30(9): 5036-5045.
[19] Wang Jun, Huang Xiaoyan, Yu Dong, et al. An accurate virtual signal injection control of MTPA for an IPMSM with fast dynamic response[J]. IEEE Transactions on Power Electronics, 2018, 33(9): 7916-7926.
[20] Chen Qian, Zhao Wenxiang, Liu Guohai, et al. Extension of virtual-signal-injection-based MTPA control for five-phase IPMSM into fault-tolerant operation[J]. IEEE Transactions on Industrial Elec- tronics, 2019, 66(2): 944-955.
[21] Lin Faa-Jeng, Hung Ying-Chih, Chen Jia-Ming, et al. Sensorless IPMSM drive system using saliency back- EMF-based intelligent torque observer with MTPA control[J]. IEEE Transactions on Industrial Infor- matics, 2014, 10(2): 1226-1241.
[22] Tang Qipeng, Shen Anwen, Luo Pan, et al. IPMSMs sensorless MTPA control based on virtual q-axis inductance by using virtual high-frequency signal injection[J]. IEEE Transactions on Industrial Elec- tronics, 2020, 67(1): 134-146.
[23] Zhang Jiahao, Liu Guohai, Chen Qian. MTPA control of sensorless IPMSM drive system based on virtual and actual high-frequency signal injection[J]. IEEE Transactions on Transportation Electrification, 2021, 7(3): 1516-1526.
MTPA Control of Sensorless IPMSM Based on Virtual Signal and High-Frequency Pulsating Signal Injection
Abstract To reduce the copper loss of the traditional sensorless control system for interior permanent magnet synchronous motor (IPMSM) at low-speed region, a new method of virtual signal and high-frequency pulsating signal injection is proposed to realize the sensorless control and the maximum torque per ampere (MTPA) control simultaneously to improve the motor output torque capability and system efficiency. Different from the traditional MTPA control based on virtual signal injection, the proposed MTPA method injects a virtual constant signal into the estimated d-axis and q-axis currents, thereby avoiding the inference between the two control strategies. The proposed MTPA method does not cause additional copper loss and is parameter independent. Besides, since the injected signal in MTPA method is constant, the detection accuracy of rotor position will not be affected. The experiments verify the proposed method can realize the sensorless control and the MTPA control simultaneously and accurately under different load and speed conditions.
keywords:Interior permanent magnet synchronous motor, high-frequency pulsating signal injection, sensorless control, maximum torque per ampere control, virtual signal injection
DOI: 10.19595/j.cnki.1000-6753.tces.211039
中图分类号:TM315
国家杰出青年科学基金资助项目(52025073)。
收稿日期 2021-07-12
改稿日期 2021-09-17
赵文祥 男,1976年生,教授,博士生导师,研究方向为电机及其控制。E-mail: zwx@ujs.edu.cn
刘 桓 男,1995年生,硕士研究生,研究方向为永磁电机的驱动控制。E-mail: 729284143@qq.com
(编辑 崔文静)