 (1)
(1)式中, 为主绕组转子磁链;Nr为主绕组与从绕组的等效匝比;
为主绕组转子磁链;Nr为主绕组与从绕组的等效匝比; 与
与 分别为主绕组和从绕组的电枢反应磁链,其表达式为
分别为主绕组和从绕组的电枢反应磁链,其表达式为
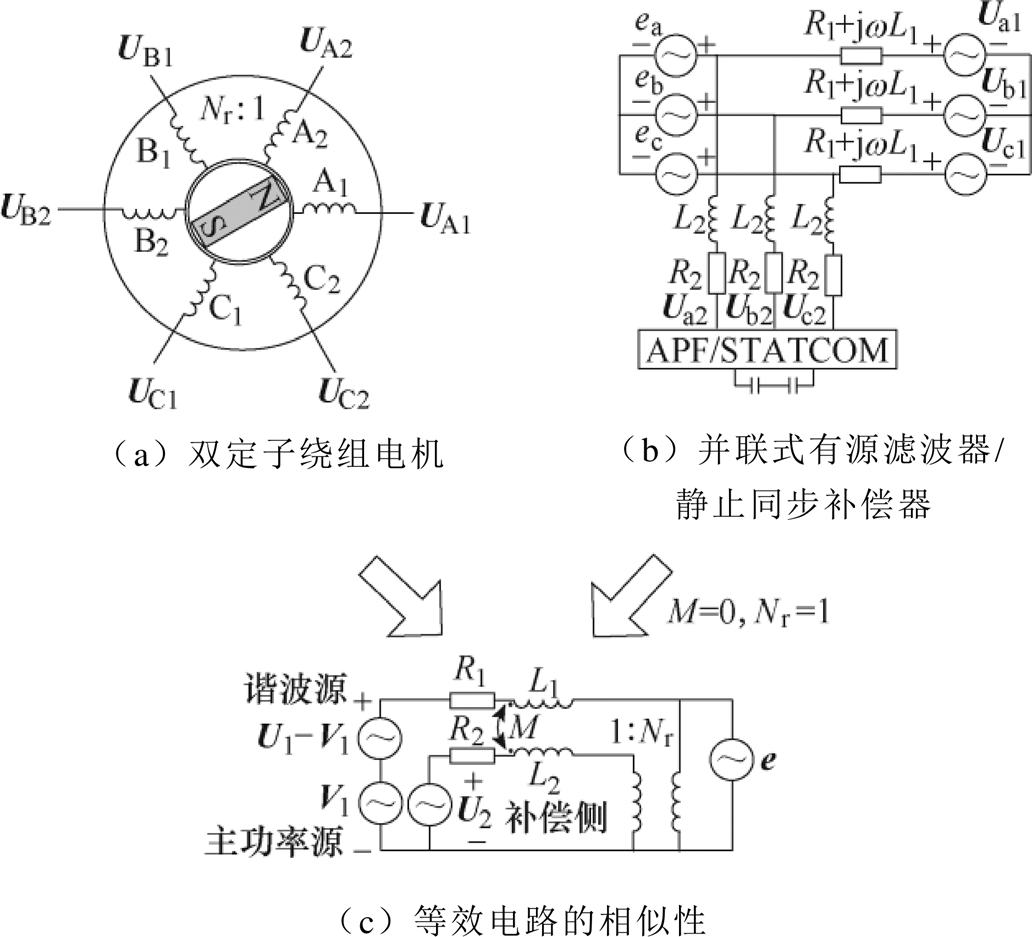
图1 主从绕组电机驱动系统与有源滤波系统类比
Fig.1 Comparison of the master-slave windings motor driver and active power filters
摘要 针对大功率电机驱动系统工作在低载波比下引起的转矩脉动问题,该文提出一种基于双定子绕组结构的主从绕组电机驱动系统。利用向从绕组中注入高频谐波电流形成补偿磁链,再与低载波比工况下的主绕组磁链线性组合,保证圆形组合磁链,找到解决低载波比驱动系统中的转矩脉动问题的新途径。首先,阐述电机中主从绕组的磁链组合与转矩补偿原理,并给出主从绕组的设计指标;其次,针对从绕组侧高频谐波电流注入方式、控制策略等问题进行详细分析;最后,仿真与实验均表明该文提出的主从绕组系统及其控制策略的有效性。通过变换器开关损耗与导通损耗的计算与比较,结果表明,实现相同转矩脉动指标,主从绕组系统损耗可以降低30%左右,明显优于现有高载波比三相系统。
关键词:主从绕组 电机驱动 磁链组合 转矩脉动补偿
由于电力电子功率器件开关损耗的限制,大功率电机驱动变换器载波比通常较低,严重的定子电流与磁链谐波造成转矩脉动以及转矩精度恶化[1-2]。近年来,随着电机在伺服系统等高端大型装置中的应用,如何提高大功率电机的输出转矩性能成为迫切需要解决的问题[3]。特定谐波消除等脉冲宽度调制(Pulse Width Modulation, PWM)优化方法尽管抑制了部分转矩脉动,但仍受制于载波比约束,转矩脉动抑制效果有限[4-5]。宽禁带器件应用、多电平技术等通过提升驱动器载波比或等效开关频率等方法抑制谐波[6-7],但成本、系统复杂度等问题限制了此类方案的推广应用[8]。
从电励磁同步电机、双馈发电机等多绕组电机应用表明,结合新型电力电子变换技术将显著提升电机性能[9-14]。电励磁与混合励磁同步电机通过调节转子直流励磁,使电机在高速工况下具有更好的弱磁能力[11, 13]。而双馈发电机通过控制转子绕组交流励磁电流相位调整机组功率角,使其有功和无功功率独立可调,在电网电压跌落等情况下相比单绕组电机具有更好的稳定性[12, 14]。上述结构表明,通过电力电子技术控制多绕组磁链组合是提升电机驱动性能的新途径。
结合双绕组电机多自由度特性,参考有源滤波系统高频电流发生与谐波补偿的原理,本文构建了一种包含主功率绕组与辅助功率绕组的主从绕组结构电力电子驱动系统。利用向从绕组中注入高频谐波电流形成高频补偿磁链与低载波比工况下的主绕组侧低频磁链线性组合,重新形成新的圆形组合磁链,从而抑制转矩脉动,具有转矩脉动小、效率高、动态优越等优势。本文围绕主从绕组系统的组合方式,从矢量合成、主从绕组设计、控制策略、损耗等方面进行详细的分析、仿真与实验验证。
双定子绕组包含双绕组同齿槽和双绕组分齿槽两种结构[15-16],形成了双三相电机与含辅助绕组电机等多种电机形式,通过参数换算,这类电机具有统一的等效电路。双定子绕组结构与并联式有源滤波拓扑具有相同形式的等效电路,如图1所示。基于图1等效电路一致性,参考有源滤波器的运行方式,将系统主功率通过主绕组A1B1C1传输,采用低载波比方式降低损耗,同时从绕组A2B2C2产生高频电流并通过定子磁场耦合抑制主绕组转矩脉动,最终构成一种主从绕组电机驱动系统。
主从绕组系统的定子磁链由转子永磁体磁链和电枢反应磁链两部分组成,有
(1)式中,为主绕组转子磁链;Nr为主绕组与从绕组的等效匝比;与分别为主绕组和从绕组的电枢反应磁链,其表达式为
图1 主从绕组电机驱动系统与有源滤波系统类比
Fig.1 Comparison of the master-slave windings motor driver and active power filters
 (2)
(2)式中,L1、L2与M分别为主绕组自感、从绕组自感以及两绕组间互感;I1和I2分别为主绕组和从绕组电流矢量。
根据式(2)可得系统电磁转矩Te与及的关系,有
 (3)
(3)式中,pn为电机极对数。
参考三相电机转矩表达式,定义 为主从绕组的组合电枢反应磁链,有
为主从绕组的组合电枢反应磁链,有
 (4)
(4)式(4)表明,是主从绕组电枢反应磁链的线性叠加。下面根据组合磁链与各绕组磁链关系分析电机转矩脉动。
当I2=0时,从绕组变换器停止工作,仅主绕组以低载波比运行。当M较小时,≈0。通过式(3)和式(4)可得主绕组电枢磁链脉动以及对应的转矩脉动为
 (5)
(5)式中,V1为主绕组理想圆形磁链轨迹对应的电压矢量;U1为主绕组实际电压矢量;Dt为电压U1作用时间。载波比较低,此时主绕组电枢反应磁链的轨迹从理想圆形轨迹退化为不规则多边形轨迹。
通过从绕组变换器调整I2实现 =0,此时主从绕组磁链脉动完全抵消。对应可得高载波比运行的从绕组注入的电压U2应满足
=0,此时主从绕组磁链脉动完全抵消。对应可得高载波比运行的从绕组注入的电压U2应满足
 (6)
(6) (7)
(7)
相对式(5),组合电枢反应磁链运行轨迹重新保持圆形,输出电磁转矩保持稳定。
由式(7)可得,定子电压矢量U1和U2的匹配关系为
 (8)
(8)以上推导表明,主从绕组系统电压矢量按照KV进行匹配,式(8)为实现转矩补偿的电压组合要求。由于式(8)已经考虑了主从绕组之间的互感,因此实现转矩补偿的同时主从绕组之间可实现解耦。KV大小与主从绕组等效匝比、主绕组自感、从绕组自感以及绕组间互感等电机结构参数相关。下一节将围绕以上参数详细分析主从绕组电机设计方法。
根据主从绕组运行原理,本节讨论通过三相系统绕组的拆分与组合构建主从绕组驱动系统的具体环节。首先,在传统三相驱动系统的基础上添加从绕组及其驱动系统,如图2所示,Vdc1和Vdc2分别为主绕组和从绕组变换器的母线电压。
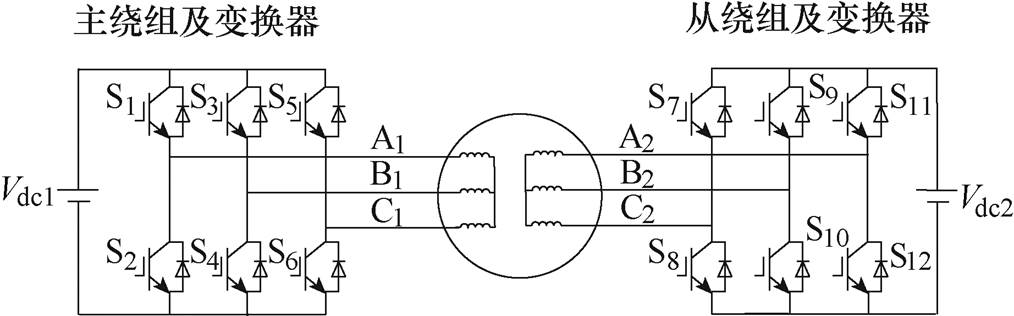
图2 主从绕组驱动系统结构
Fig.2 Scheme of the master-slave windings motor driver
由式(2)~式(5)可得,稳态时,主从绕组电流脉动通过绕组间互感综合引起的磁链波动为
 (9)
(9)式中,DI1和DI2分别为主、从绕组的电流纹波。
由于两绕组转矩脉动相互抵消,由式(3)可知
 (10)
(10)将式(10)代入式(9)可得
 (11)
(11)
式(11)表明,随着两绕组间互感M增大,相同电压脉冲序列下引起主绕组电流纹波增加,电流纹波对应的损耗上升。因此,为降低主绕组损耗,主从绕组间互感应远小于主绕组自感,即M L1。
L1。
为了设计从绕组所需母线电压设计主从绕组间匝比,由式(8)可得从绕组电压表达式为
 (12)
(12)考虑寄生电阻与电感参数,V1与V2之比约为匝比Nr,因此式(12)可变为
 (13)
(13)
由式(13)可知,当V1幅值达到最大值且U1为零矢量时,U2幅值达到最大值。根据矢量调制方法可得从绕组所需母线电压为
 (14)
(14)由于主绕组自感L1与从绕组自感L2之比约等于匝比Nr的二次方,KV的近似表达式为
 (15)
(15)
将式(15)代入式(14)可得从绕组母线电压与匝比Nr的关系为
 (16)
(16)式(16)表明,从绕组所需母线电压约为主绕组母线电压的2/Nr倍。表明若需满足主从绕组器件电压应力相等,即从绕组与主绕组母线电压接近,主从绕组匝比应满足Nr≥2。
以12槽8极永磁电机为例,构建主从绕组电机,各相绕组线圈分配如图3a所示。为满足等效匝比Nr≥2的需求,从绕组每相分配一组线圈,主绕组每相分配相邻三组线圈,且第2、6、10组线圈反绕。根据上述线圈分配方式,各组线圈电动势矢量如图3b所示。
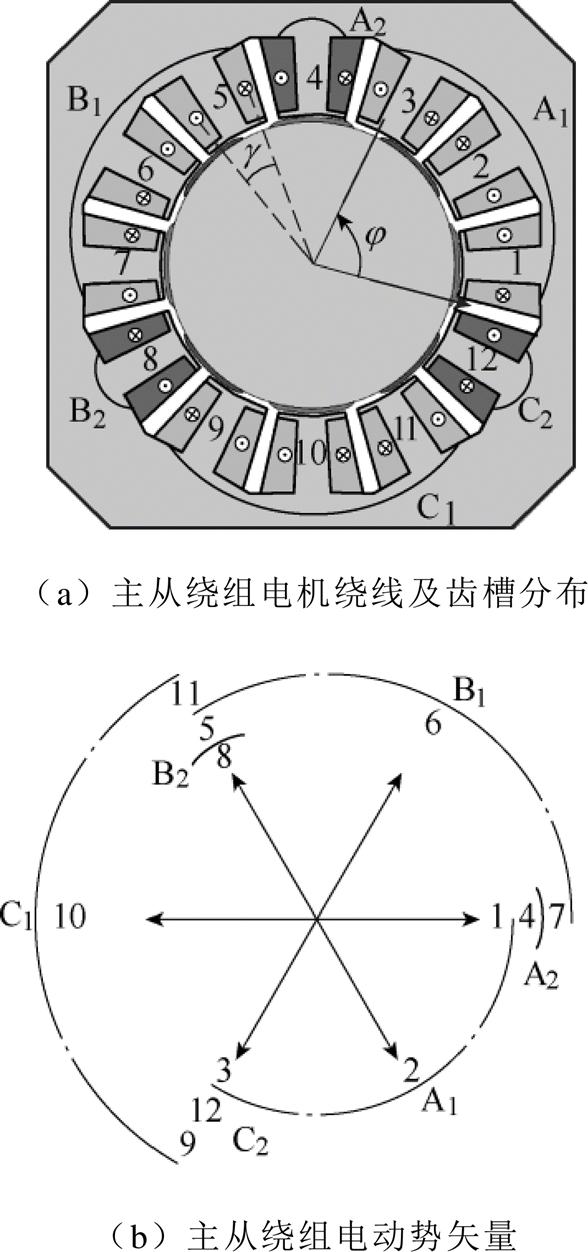
图3 主从绕组电机设计
Fig.3 Design of the master-slave winding motor
以主绕组A1相和从绕组A2相为例,分析主绕组与从绕组电动势。A1相中第1~3组线圈电动势以依次滞后60°分布,A2相中第4组线圈电动势与第1组相同,通过矢量合成可得A1相电动势是A2相电动势的两倍,且相位滞后A2相电动势相位60°。因此,图3a所示的主从绕组Nr=2,符合等效匝比需求。
采用绕组磁链函数法进行分析[17-19],以图3a中第1组和第12组线圈的中线为参考点,根据绕组函数法可得主绕组A1相和从绕组A2相通过电流I产生的气隙磁动势分布,如图4a所示。图中,n为每组线圈匝数,g 为线圈导体形成的夹角(g<p/6 。由图可得,|F1|/|F2|>11以及|F3|/|F2|>13,因此绕组A1在自身产生的磁动势远高于在各相从绕组产生的磁动势,同样绕组A2在自身产生的磁动势远高于在各相主绕组产生的磁动势。这说明主从绕组之间互感远小于自感,符合互感要求。
。由图可得,|F1|/|F2|>11以及|F3|/|F2|>13,因此绕组A1在自身产生的磁动势远高于在各相从绕组产生的磁动势,同样绕组A2在自身产生的磁动势远高于在各相主绕组产生的磁动势。这说明主从绕组之间互感远小于自感,符合互感要求。
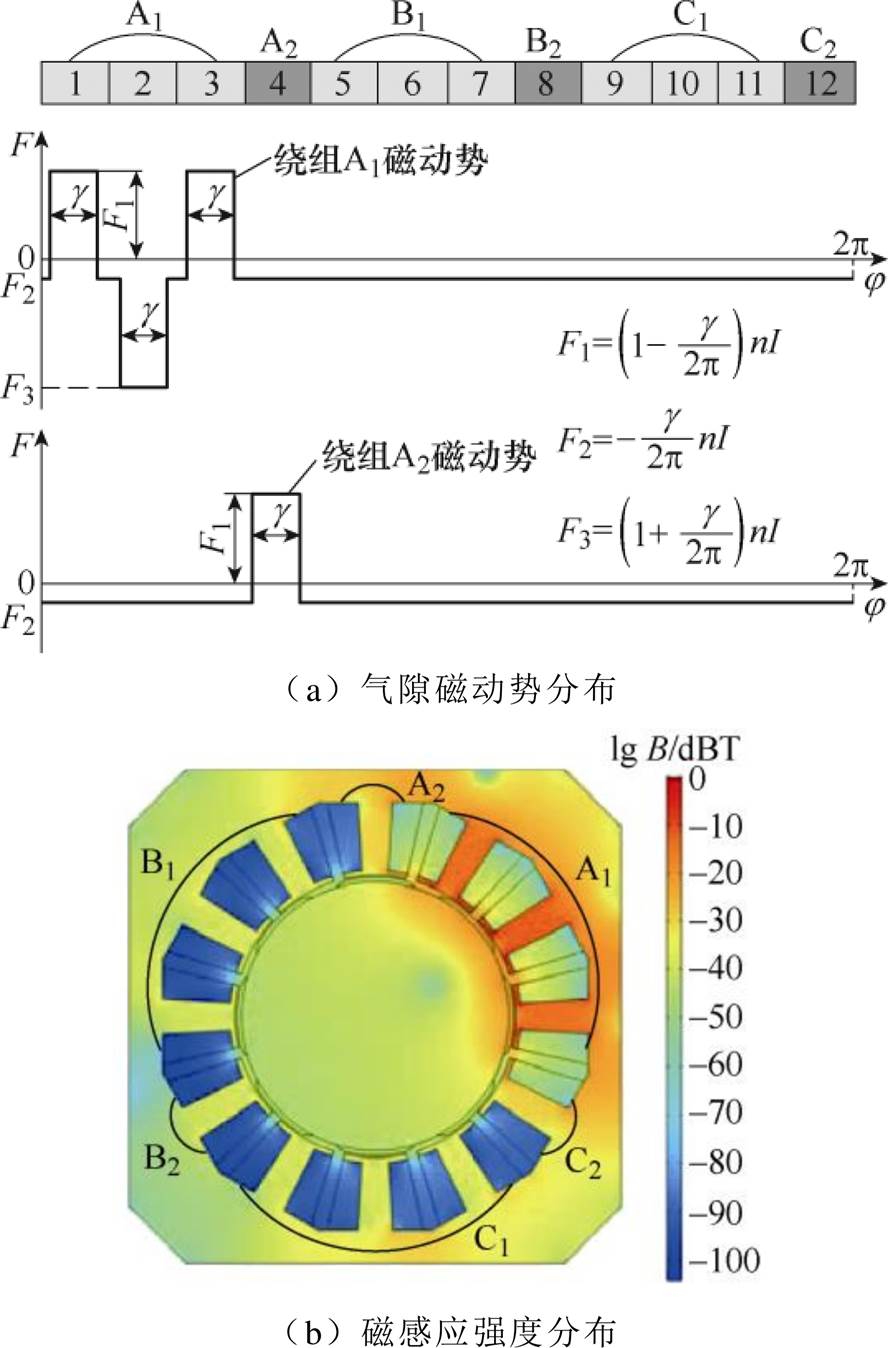
图4 电机互感分析
Fig.4 Mutual inductance analysis for master-slave windings
根据有限元仿真,图4b展示了绕组A1注入电流产生的磁感应强度分布,可以看出,与绕组A1自身交链的磁通远高于与各相从绕组交链的磁通,与图4a分析结果相符。
根据主从绕组的基本运行原理,本节提出了基于转子磁链定向的主从绕组系统控制策略。为实现主绕组和从绕组的独立控制,采用双重dq变换进行磁场定向,其中主绕组和从绕组的变换矩阵分别为
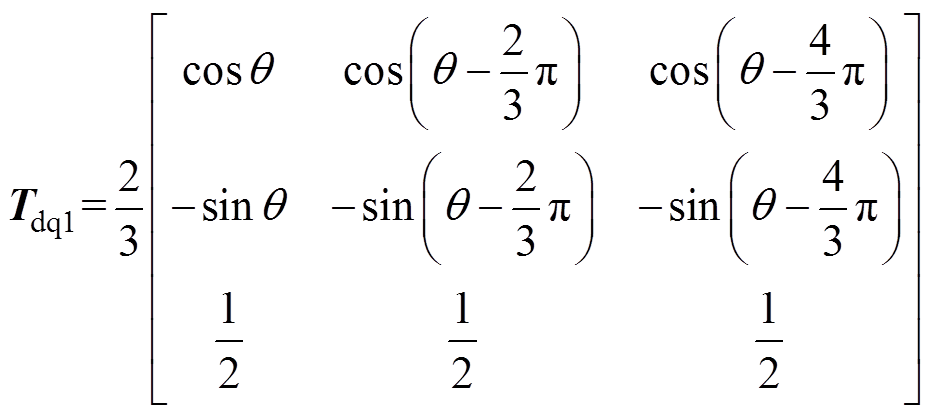 (17)
(17)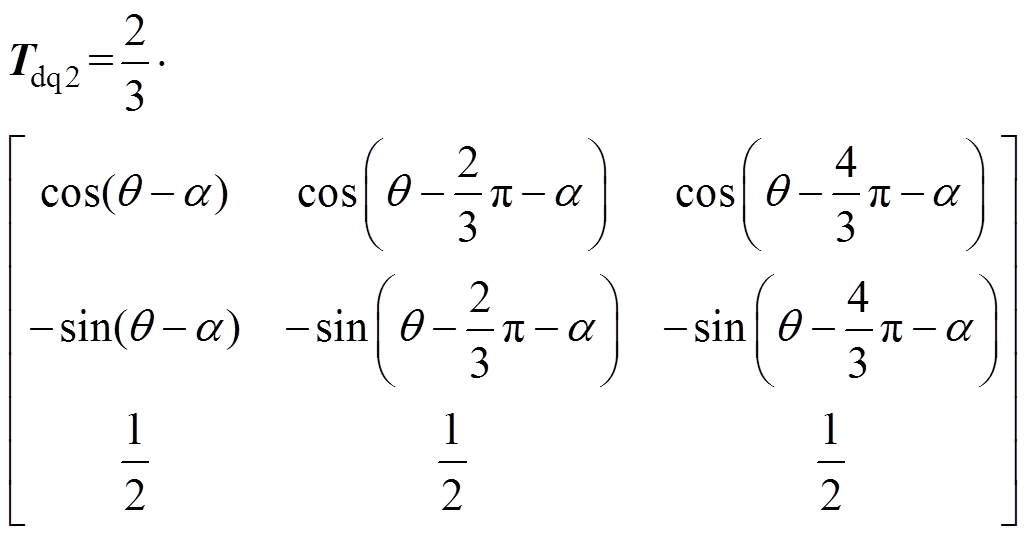 (18)
(18)
式中,q 为转子磁链电角度;a 为从绕组与主绕组相差的电角度。
在双重dq坐标系下,式(12)中的从绕组电压表达式改写为
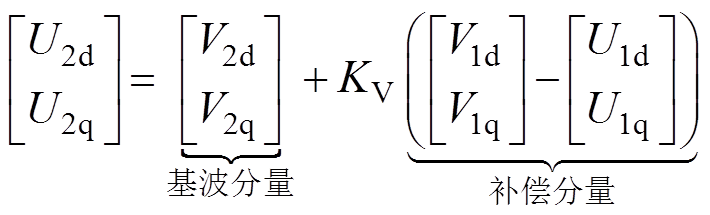 (19)
(19)其中,主从绕组电压基波分量V1d、V1q、V2d和V2q由电流闭环控制器计算得到,而主绕组实际电压U1d和U1q通过矢量调制方法计算得到。
在电机加减速和面临负载扰动时,从绕组将提供辅助转矩,一方面提升主从绕组系统的动态响应;另一方面可参与负载扭振的抑制。记从绕组转矩与总转矩之比为变量KT,可得主从绕组q轴电流参 考值为
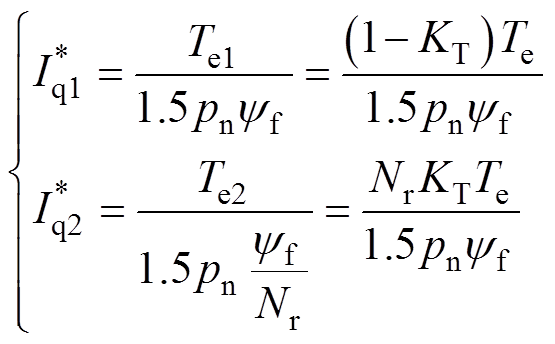 (20)
(20)最后,主从绕组驱动系统控制策略如图5所示,其中转矩分配单元根据式(20)分配主从绕组q轴电流,电流控制单元实现主从绕组d轴和q轴电流的解耦控制,转矩纹波补偿单元根据式(19)实现总转矩平稳输出。
图6阐释了图5控制方法的工作原理,图6a为主绕组单独运行的矢量。随着载波比降低,定子电压V1退化为U1,不再满足圆形轨迹,产生q轴电流纹波,造成转矩脉动。图6b为增添从绕组后的主绕组运行矢量,解释了互感M使主绕组电流脉动增加。图6c为按式(19)匹配运行的从绕组矢量,图6d为主从绕组电流纹波关系,可以看出,两绕组电流脉动相互抵消,从而实现抑制转矩脉动。
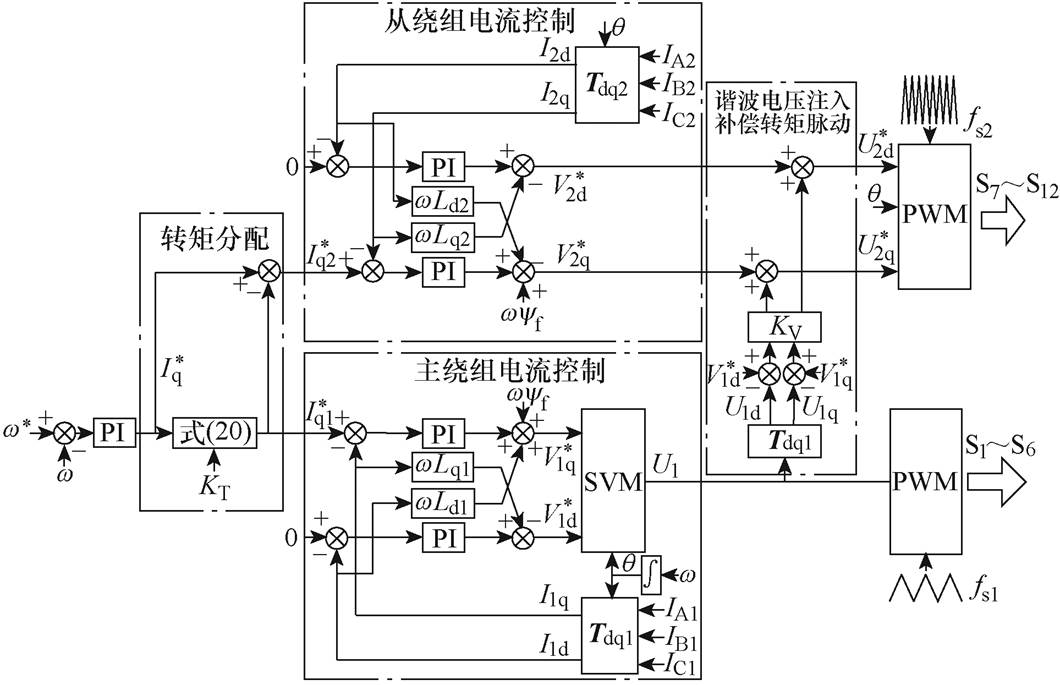
图5 主从绕组驱动系统控制策略
Fig.5 Control system for master-slave windings driver
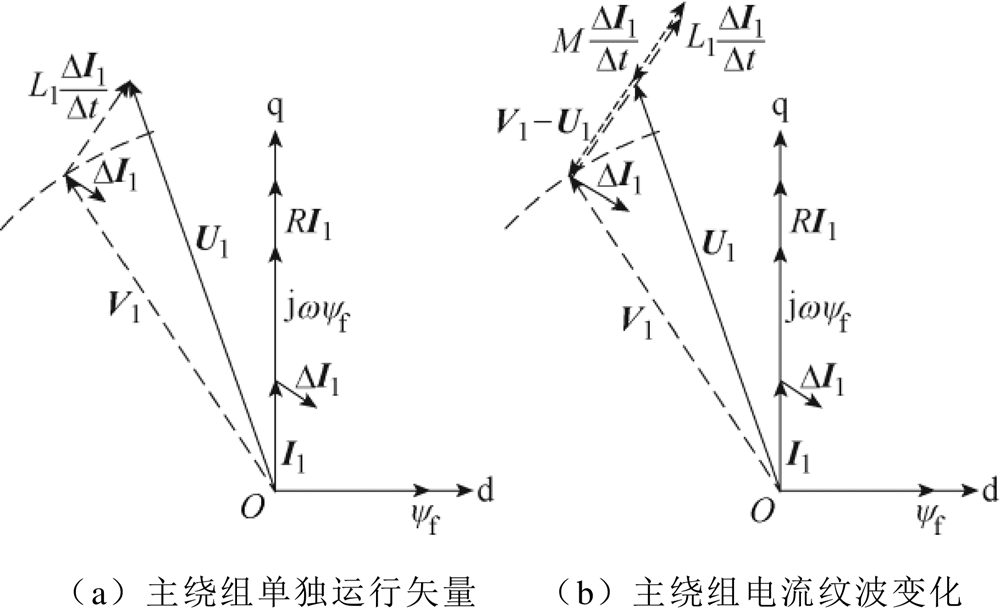
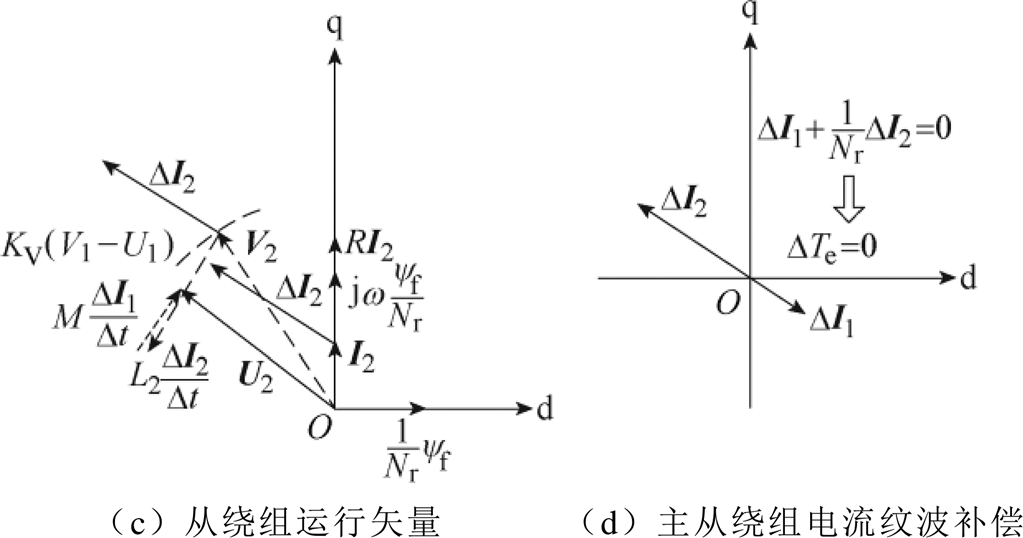
图6 主从绕组运行矢量
Fig.6 Vectors diagram of operation of the master-slave windings
在相同的功率、母线电压和转矩纹波等运行工况下,本节将对比分析主从绕组驱动系统与一般三相驱动系统的变换器损耗。变换器的器件参数见表1,表中器件开关损耗指在电压600V、电流50A下器件开通和关断各一次产生的总损耗。与三相变换器相比,由于主绕组侧变换器开关频率较低,主绕组变换器采用了导通损耗较低、开关损耗较高的器件。由于从绕组开关频率较高而电流有效值较低,因此从绕组变换器采用了开关损耗低、导通电阻较高的器件。
表1 器件参数
Tab.1 Parameters of the power devices
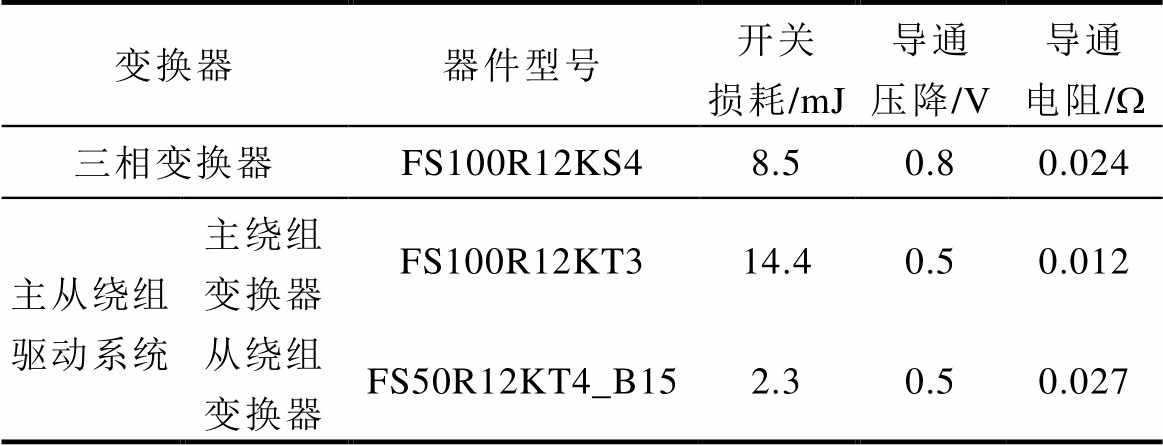
变换器器件型号开关损耗/mJ导通压降/V导通电阻/W 三相变换器FS100R12KS48.50.80.024 主从绕组驱动系统主绕组变换器FS100R12KT314.40.50.012 从绕组变换器FS50R12KT4_B152.30.50.027
根据计算得到了主从绕组系统相对一般三相系统的变换器驱动系统损耗变化,如图7所示。其中,驱动系统参数:功率为30kW,调制比为0.99,VDC=600V,fo=50Hz,从绕组开关频率fs2=10kHz,三相系统开关频率fs3=10kHz。图7中,P0为三相电机系统总损耗,P7为主从绕组系统总损耗。P1和P2分别为三相变换器的开关损耗和导通损耗。DP1为主绕组变换器开关损耗与P1之差,DP2为主绕组变换器导通损耗与P2之差。损耗单位为W。与三相系统相比,由于主绕组开关频率大幅降低,主绕组变换器开关损耗降低。同时由于主绕组采用了低导通损耗器件,主绕组变换器的导通损耗下降。根据上述分析,DP1与DP2可以视为降低主绕组载波比减少的主绕组变换器开关损耗和导通损耗。
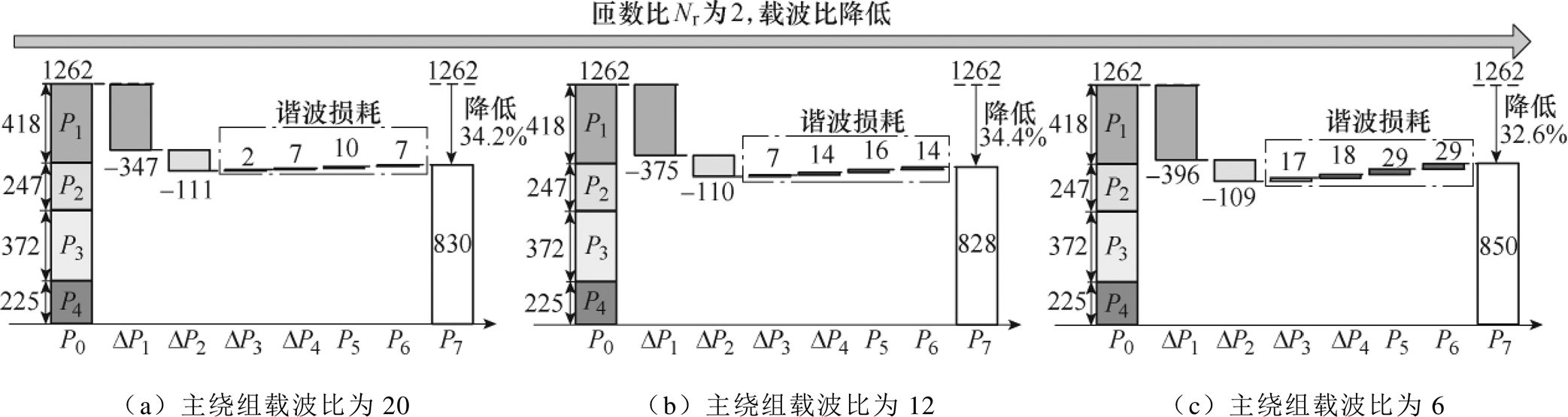
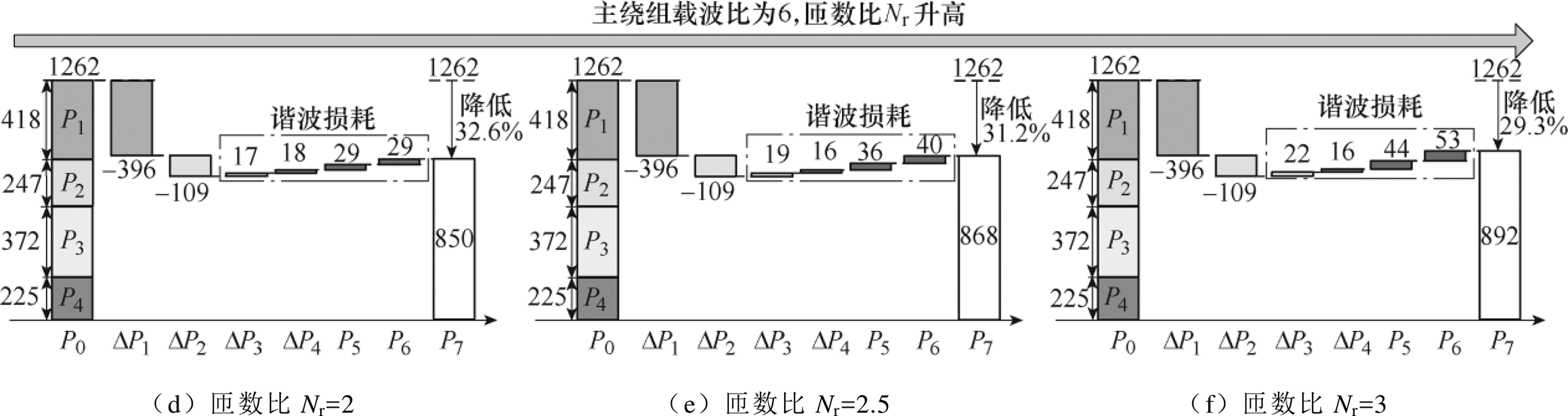
图7 电机驱动系统损耗对比
Fig.7 Diagram of system loss comparison
图7中,P3为三相电机系统的铜损,P4为铁损,DP3和DP4分别为从绕组注入谐波后电机增加的铜损与铁损。由于注入的电流谐波由从绕组变换器产生,所以从绕组变换器导通损耗P5和开关损耗P6可以被视为由注入电流谐波引起的损耗。由此,可得通过注入电流引起的总谐波增加的损耗,如图7点画线所标记。
与主绕组降低的损耗相比,由于从绕组注入谐波电流有效值较低,注入谐波增加的损耗远低于通过降低主绕组载波比减少的损耗,所以与三相系统相比,主从绕组系统的变换器损耗降低,如图7 所示。
具体而言,通过图7a~图7c横向比较了不同主绕组载波比下系统损耗的详细变化。可以看出,随着主绕组载波比降低,主绕组开关损耗下降。同时由于电流纹波增加,从绕组开关损耗和导通损耗上升。主绕组载波比低于6时,从绕组损耗增加更显著,抵消了主绕组损耗的降低,使系统总损耗上升。从损耗角度考虑,主绕组载波比应不低于6。
图7d~图7f比较了不同匝比的主从绕组系统损耗。由式(10)可知,随着匝比增加,从绕组电流纹波增加,从绕组损耗上升,图中系统损耗随匝比增加而上升。因此,从损耗角度考虑,主从绕组匝比应为2。
为验证本文所提出的主从绕组驱动系统运行原理,按照第3节的方法绕制了主从绕组样机,并搭建了实验平台,如图8所示。通过阻抗分析仪测量得到主绕组电感为14.5mH,从绕组电感为3.6mH,而主从绕组互感只有0.74mH,与第1.2节互感分析结论相符。
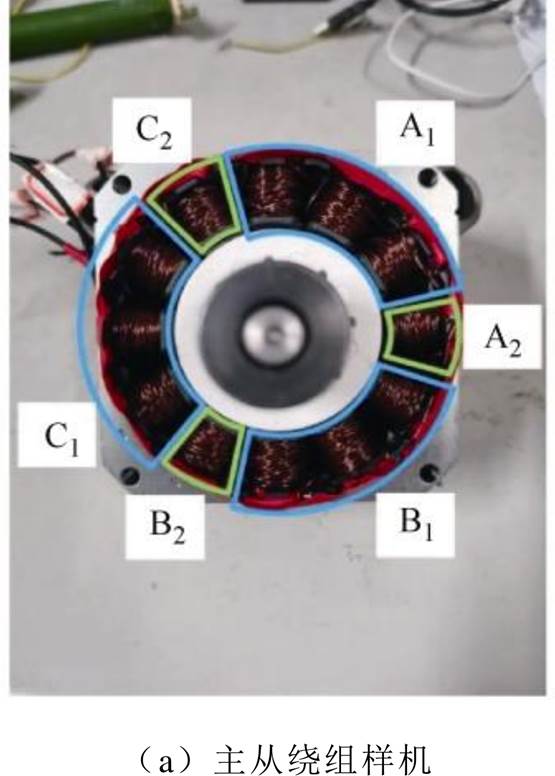
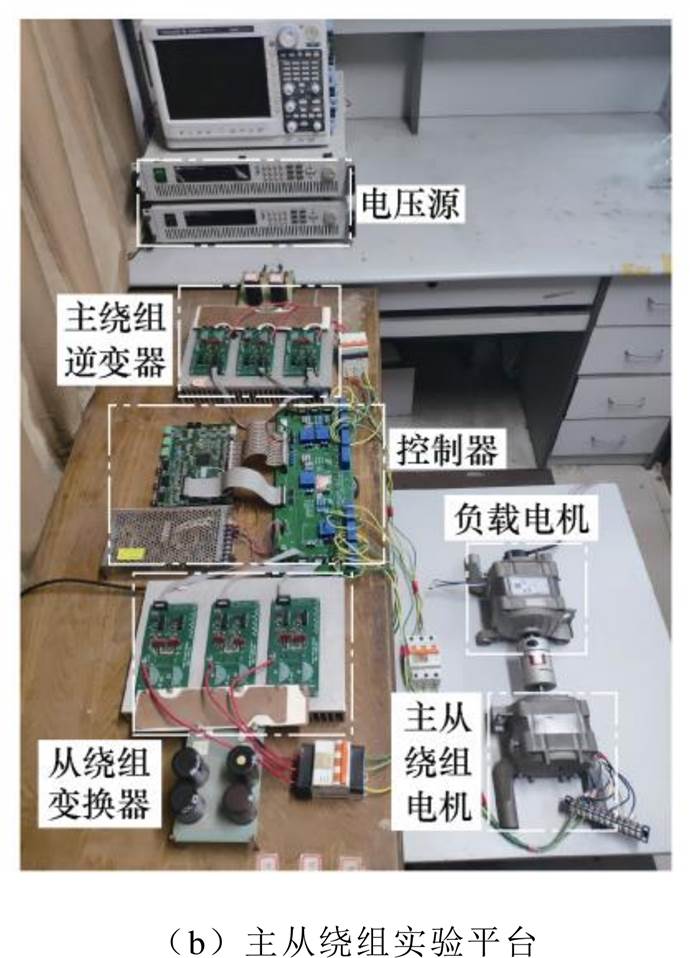
图8 实验平台
Fig.8 Experiment platform
通过仿真验证图5提出的主从绕组控制策略,结果如图9所示。其中,基波频率为40Hz,主绕组开关频率为250Hz,载波比为6.25,从绕组开关频率为10kHz。图9a为主从绕组的转矩补偿效果。其中,Te1为主绕组转矩,Te2为从绕组转矩,Te为总转矩。由图可见,从绕组产生的转矩有效补偿了主绕组低载波比运行产生的转矩脉动,使总转矩保持 稳定。
图9b为主从绕组运行时的磁链轨迹。第一张图表示主绕组低载波比运行时的电枢磁链不规则轨迹。通过第二张图中从绕组产生补偿磁链,第三张图中的组合电枢反应磁链轨迹呈圆形,验证了第2节中的主从绕组运行原理。图9c为主从绕组运行时的电压轨迹。由图可见,主从绕组所需电压母线相同,验证了第1节中对匝比的分析。
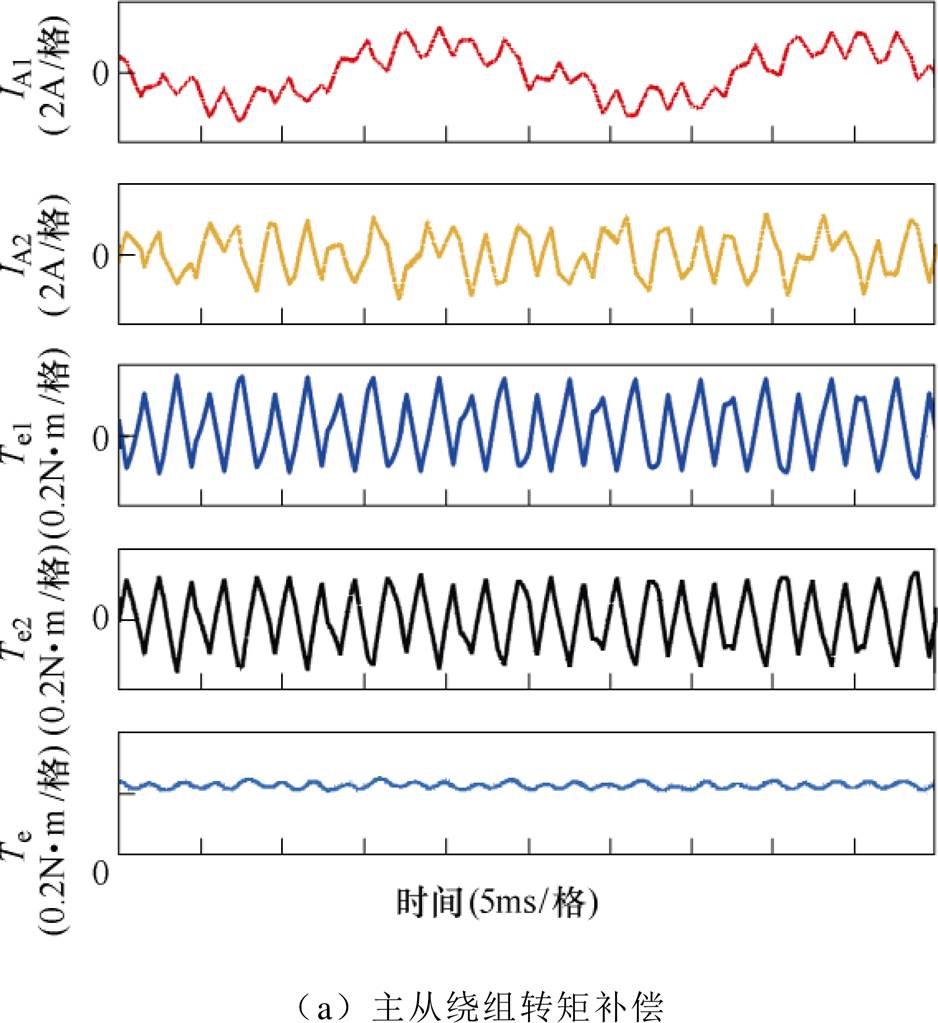
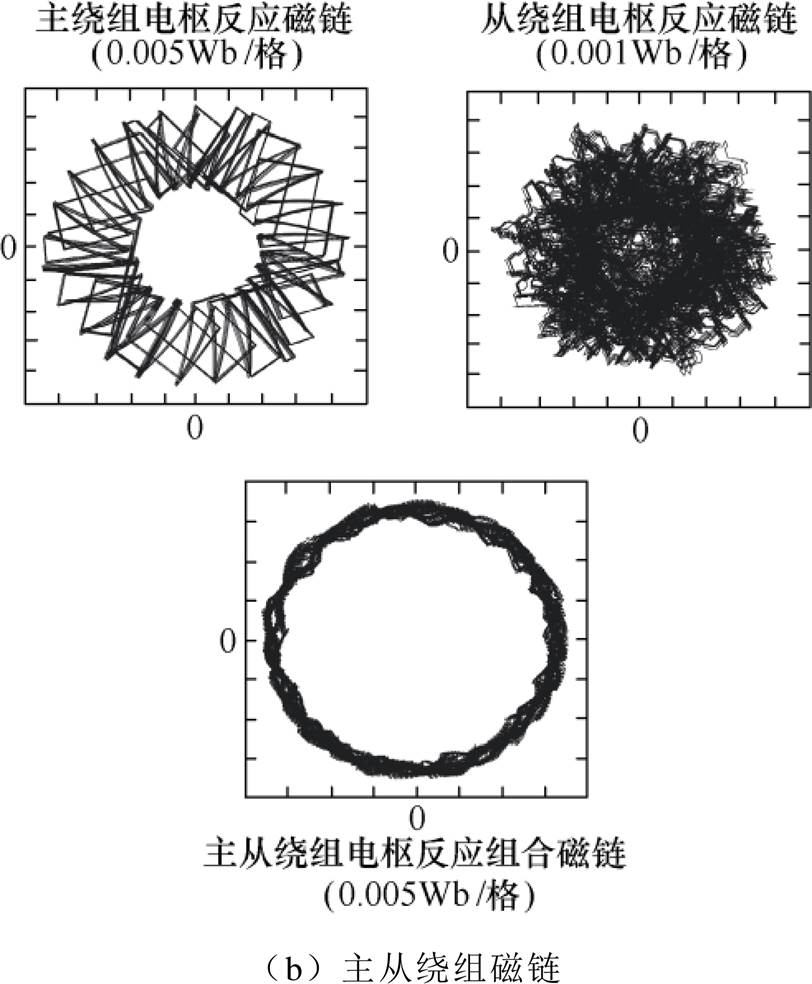
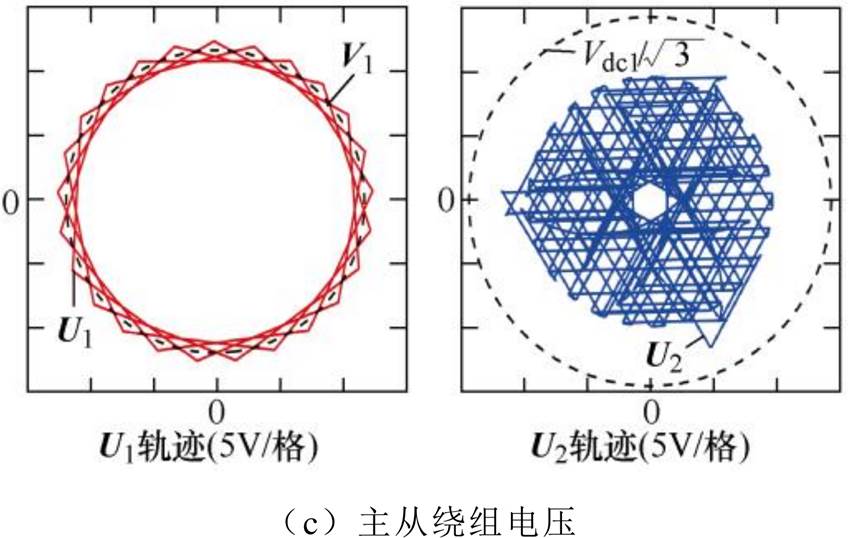
图9 主从绕组驱动系统转矩补偿仿真
Fig.9 Simulation of torque ripple compensation for the master-slave windings driver
主从绕组驱动系统转矩补偿实验如图10所示。由图可见,实验波形与仿真波形基本相符。图11对比了主绕组转矩以及总转矩的快速傅里叶变换(Fast Fourier Transform, FFT)分析结果。由于主绕组载波比(250Hz 40Hz)较低,主绕组转矩脉动较高,其中主要成分为两倍开关频率(500Hz)分量,其幅值与平均转矩之比接近28%。此时,从绕组通过高载波比(10kHz40Hz)产生互补转矩,抵消主绕组转矩脉动,使总转矩中转矩脉动降低82%。可见,总转矩中来自主绕组的转矩纹波分量被有效抑制。
40Hz)较低,主绕组转矩脉动较高,其中主要成分为两倍开关频率(500Hz)分量,其幅值与平均转矩之比接近28%。此时,从绕组通过高载波比(10kHz40Hz)产生互补转矩,抵消主绕组转矩脉动,使总转矩中转矩脉动降低82%。可见,总转矩中来自主绕组的转矩纹波分量被有效抑制。

图10 主从绕组驱动系统转矩补偿实验
Fig.10 Experiment of torque ripple compensation for the master-slave windings driver
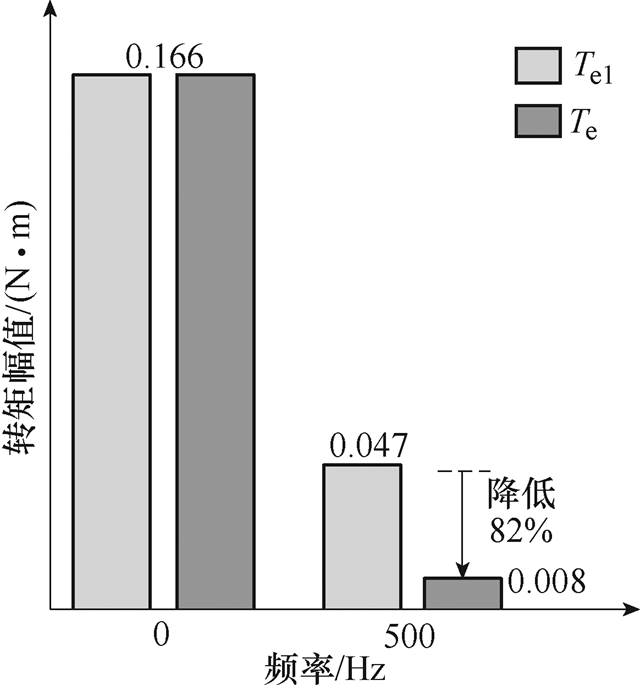
图11 转矩脉动FFT分析
Fig.11 FFT analysis of torque ripples
图12为主从绕组驱动系统转矩切换实验,展示了负载切换时从绕组对主绕组转矩脉动的补偿效果。负载转矩发生变化时,由主绕组转矩Te1负责跟踪负载转矩。可以看出,在主绕组转矩变化的过程中,从绕组转矩仍然有效补偿主绕组转矩纹波,验证了提出控制方法的有效性。
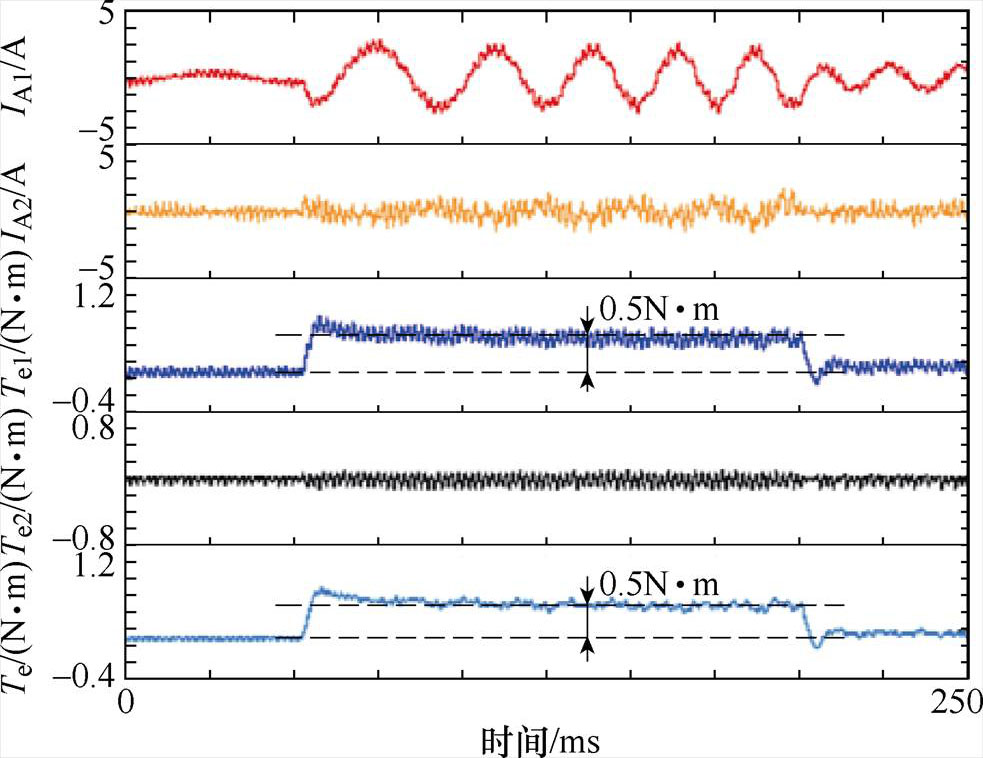
图12 主从绕组驱动系统转矩切换实验
Fig.12 Experiment of torque variation for the master-slave windings motor
图13为负载扰动时从绕组投切实验,展示了从绕组对负载转矩扰动的抑制效果,Iq1与Iq2分别为主绕组与从绕组的q轴电流,w为转速。实验通过负载电机模拟负载转矩扰动,开始时由主绕组输出负载转矩的平均值,而从绕组负责跟踪负载转矩扰动。当从绕组切出后,由于低开关频率限制了主绕组电流环带宽,主绕组难以跟踪负载转矩扰动,因此速度与主绕组q轴电流出现振荡。当从绕组重新投入后,从绕组较高带宽的电流环快速响应,使电机速度快速恢复稳定。
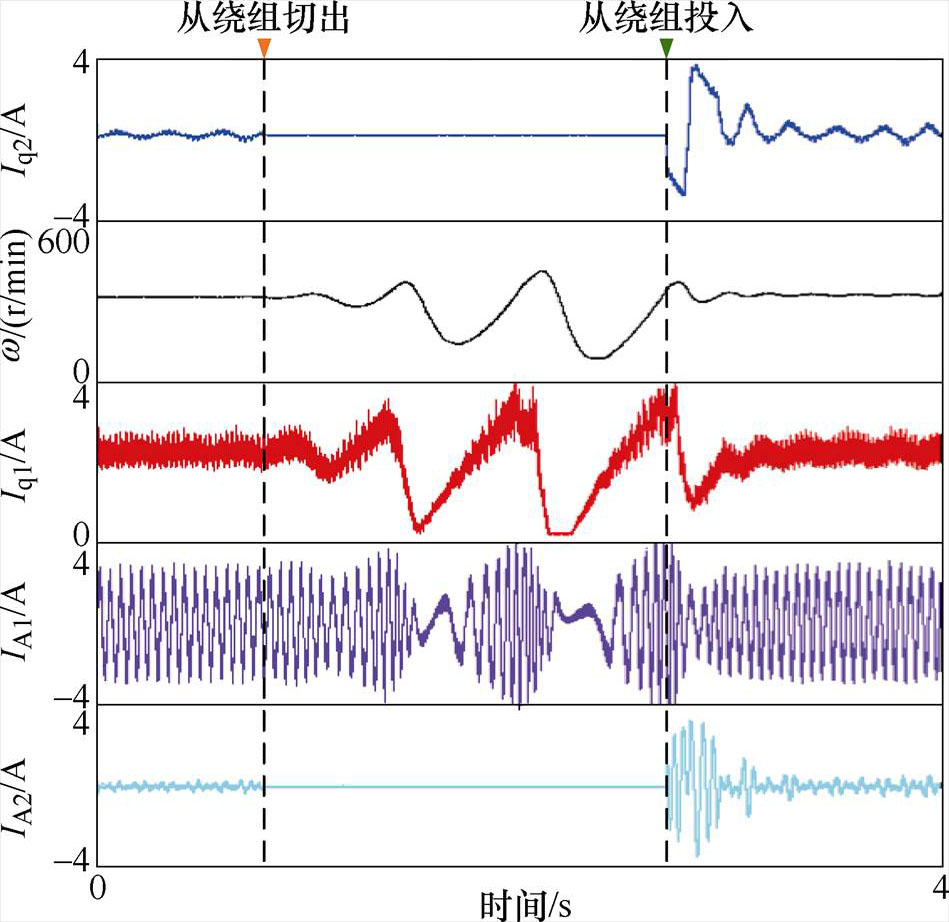
图13 负载扰动时从绕组投切实验
Fig.13 Experiment for switching of slave winding during load fluctuation
本文基于双定子绕组结构的电机,提出一种主从式的驱动结构及控制策略。该系统中通过从绕组侧的注入高频电流实现了对低载波比主绕组侧转矩的补偿。损耗分析表明,在输出转矩指标接近的情况下,本文提出的驱动系统相比高载波比三相系统可大幅降低变换器损耗。仿真与实验验证了本文提出的驱动系统及控制策略的有效性。本文研究对电机驱动系统的集成化设计及变频系统的谐波抑制研究均有重要参考作用。
参考文献
[1] 赵雷廷, 刁利军, 张哲, 等. 低开关频率下异步电机电流环的数字控制[J]. 中国电机工程学报, 2014, 34(21): 3456-3466.
Zhao Leiting, Diao Lijun, Zhang Zhe, et al. Discrete- time current controller for induction motors at low switching frequency[J]. Proceedings of the CSEE, 2014, 34(21): 3456-3466.
[2] Shen Jie, Schroder S, Stagge H, et al. Impact of modulation schemes on the power capability of high-power converters with low pulse ratios[J]. IEEE Transactions on Power Electronics, 2014, 29(11): 5696-5705.
[3] 虞志源. 大功率高精度永磁交流伺服系统关键技术研究[D]. 杭州: 浙江理工大学, 2016.
[4] Blasko V. A novel method for selective harmonic elimination in power electronic equipment[J]. IEEE Transactions on Power Electronics, 2007, 22(1): 223-228.
[5] Grahame H D, Lipo T A. 电力电子变换器PWM技术原理与实践[M]. 北京: 人民邮电出版社, 2010.
[6] Zhang Zheyu, Wang Fred, Tolbert L M, et al. Evalu- ation of switching performance of SiC devices in PWM inverter-fed induction motor drives[J]. IEEE Transactions on Power Electronics, 2015, 30(10): 5701-5711.
[7] 何湘宁, 陈阿莲. 多电平变换器的理论和应用技术[M]. 北京: 科学出版社, 2005.
[8] Zhao Tiefu, Wang Jun, Huang A Q, et al. Com- parisons of SiC MOSFET and Si IGBT based motor drive systems[C]//2007 IEEE Industry Applications Annual Meeting, New Orleans, USA, 2007: 331- 335.
[9] 刘国海, 张嘉皓, 陈前. 基于空间电压矢量注入的频率可变型五相永磁同步电机最大转矩电流比控制[J]. 电工技术学报, 2020, 35(20): 4287-4295.
Liu Guohai, Zhang Jiahao, Chen Qian. Variable frequency maximum-torque-per-ampere control for five-phase permanent-magnet motor based on space voltage vector injection[J]. Transactions of China Electrotechnical Society, 2020, 35(20): 4287-4295.
[10] Zhang Bingnan, Du Bochao, Zhao Tianxu, et al. Research on the combinations of pole and slot for twelve-phase fractional-slot concentrated-winding permanent magnet motor[C]//2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 2019: 1-6.
[11] 李崇坚. 交流同步电机调速系统[M]. 北京: 科学出版社, 2006.
[12] Ni Kai, Hu Yihua, Gan Chun. Parameter deviation effect study of the power generation unit on a doubly-fed induction machine-based shipboard pro- pulsion system[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(4): 339-348.
[13] 李祥林, 李金阳, 杨光勇, 等. 电励磁双定子场调制电机的多目标优化设计分析[J]. 电工技术学报, 2020, 35(5): 972-982.
Li Xianglin, Li Jinyang, Yang Guangyong, et al. Multi-objective optimization analysis of electric- excitation double-stator field-modulated machine[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 972-982.
[14] 夏超英, 张耀华, 郭海宇. 无刷双馈电机反馈线性化控制方法[J]. 电工技术学报, 2020, 35(7): 1387- 1397.
Xia Chaoying, Zhang Yaohua, Guo Haiyu. Feedback linearization control approach of brushless doubly fed machine[J]. Transactions of China Electro- technical Society, 2020, 35(7): 1387-1397.
[15] Hu Sideng, Liang Zipeng, Zhang Wei, et al. Research on the integration of hybrid energy storage system and dual three-phase PMSM drive in EV[J]. IEEE Transactions on Industrial Electronics, 2018, 65(8): 6602-6611.
[16] Tamrakar I, Malik O P. Power factor correction of induction motors using PWM inverter fed auxiliary stator winding[J]. IEEE Transactions on Energy Conversion, 1999, 14(3): 426-432.
[17] 陈威, 吴桂初, 方攸同. 基于绕组分布函数理论和动态磁网络的两种内置式永磁牵引电机解析建模方法[J]. 电工技术学报, 2020, 35(2): 377-386.
Chen Wei, Wu Guichu, Fang Youtong. Two analytical models based on winding function theory and dynamic reluctance mesh for interior permanent magnet traction machines[J]. Transactions of China Electrotechnical Society, 2020, 35(2): 377-386.
[18] Raziee S, Misir O, Ponick B. Winding function approach for winding analysis[J]. IEEE Transactions on Magnetics, 2017, 53(10): 1-9.
[19] 刘凯, 张炳义, 冯桂宏. 基于非对称绕组函数法永磁同步电机偏心电感参数的研究[J]. 电工技术学报, 2020, 35(增刊2): 387-394, 431.
Liu Kai, Zhang Bingyi, Feng Guihong. Research on eccentric inductance of permanent magnet machine based on asymmetrical winding function approach[J]. Transactions of China Electrotechnical Society, 2020, 35(S2): 387-394, 431.
Principle and Control Strategy for Master-Slave Windings Motor Drive System
Abstract To solve the torque ripple caused by the low carrier ratio limitation in high-power motor drive systems, a master-slave motor drive system based on the double stator winding structure is proposed in this paper. The high frequency harmonic current is injected through the auxiliary winding to compensate the torque ripple caused by the low carrier ratio. The basic operation principle in master-slave motor drive system and the design of master-slave windings are presented. The low frequency torque ripple and high frequency compensation are analyzed in detail. The loss of the master-slave winding system is better than that of the three-phase system with high carrier ratio when the same torque ripple is ensured. Simulations and experiments show the effectiveness of the proposed master-slave winding system and the control strategy. The loss calculation under the same torque ripple shows that the loss can be reduced by 30%, compared with conventional system with high carrier ratio.
keywords:Master-slave windings, motor drive, flux combination, torque ripple compensation
DOI: 10.19595/j.cnki.1000-6753.tces.210794
中图分类号:TM351
国家自然科学基金资助项目(52177199)。
收稿日期 2021-06-01
改稿日期 2021-08-09
梁梓鹏 男,1992年生,博士研究生,研究方向为电力电子与电力传动。E-mail: loavigil@163.com
胡斯登 男,1984年生,博士,副教授,博士生导师,研究方向为电力电子与电力传动、储能与交通运输电气化等。E-mail: husideng@zju.edu.cn
(编辑 崔文静)