
图1 直流微电网基本架构
Fig.1 Basic architecture of AC-DC hybrid microgrid
摘要 针对直流微电网电能质量问题与环流问题,提出一种计及直流微电网扰动抑制的残差动态分散补偿控制策略。此策略在直流下垂控制的基础上,首先分析直流微电网扰动问题及并联状态下的环流问题;其次建立Buck型与Boost型多DC-DC变换器并联的状态空间模型,推导基于残差的变换器动态分散补偿结构,该结构直接在电压环输出端进行补偿,通过扰动抵消计算补偿控制器Q*(s)。采用小信号稳定性分析方法证明本文补偿结构的稳定性;最后基于RTDS搭建数字物理实验平台,以相同与不同类型变换器并联为例进行实验验证。该结构能够加快分布式电源及公共负荷投切时直流母线电压动态响应速度,有效地抑制了环流影响和交流侧不平衡情况引起的直流母线电压二倍工频扰动,维持了电压的一致性,保证了母线电压的稳定,有助于实现分布式电源的“即插即用”技术。
关键词:残差 直流下垂 状态空间 即插即用 电压跌落补偿 RTDS
随着新型可再生能源的发展以及用户用电需求的改变,越来越多的分布式电源需要并网运行,微电网的发展为分布式电源平滑稳定地接入大电网奠定了基础[1-3]。微电网主要包括交流微电网和直流微电网。直流微电网中包含的电力电子装置较少,不需要考虑无功和频率问题,便于光伏、蓄电池、超级电容等分布式电源的接入,因此直流微电网成为未来的重点研究方向之一[4-9],其基本结构如图1所示。直流微电网中的扰动问题主要包括电压波动、电压纹波、电压不平衡[10]等。大容量分布式电源和交直流负荷的投切会使直流母线电压出现电压波动、动态电压暂升和暂降等问题,交流侧电压不平衡现象会使直流母线电压出现电压纹波等问题,这些问题引起的电压变化会导致变换器间出现环流。
图1 直流微电网基本架构
Fig.1 Basic architecture of AC-DC hybrid microgrid
很多学者针对上述扰动问题提出了多种解决方法。文献[11]提出一种新型的分散控制算法,结合初级控制与次级控制,实现电压调节与负载电流分配,有效减小环流,但并没有考虑交流侧对直流侧的影响。文献[12]提出一种虚拟直流电机的方法,抑制了分布式电源和负荷变化引起的功率波动,但该方法的推导过程较为复杂,不利于实际应用。文献[13]提出一种基于模糊控制理论的双向DC-DC变换器时间-状态协调控制策略,加快了直流母线电压的动态响应,但设计参数选取复杂。文献[14]提出一种直流微网类虚拟同步发电机控制策略,提高了直流微电网的惯性,抑制了直流母线电压的波动,但未考虑整个直流微电网的影响。文献[15]提出一种基于模型预测的直流微电网电压动态响应优化控制方法,采用虚拟电容加快电压动态响应,抑制电压扰动影响,但该方法依赖权重系数的选取。文献[16]提出一种基于直流有源滤波器的直流母线电压纹波抑制方法,抑制了交流负荷三相不平衡等情况导致的直流母线电压纹波,但该方法引入了外部设备,增加了系统成本。文献[17]提出一种基于观测器的下垂直流微电网的电流前馈控制,无需额外的电流传感器,有效地加快了母线电压的动态响应,提高了负荷需求电流的分配精度,但并没有考虑直流母线二倍频扰动的影响。除上述问题外,在采用传统直流下垂控制的直流微电网中还存在固有的电压跌落问题,为解决此问题,文献[18]提出一种基于虚拟负电阻的反馈控制方法,以抵消线路电流对电压的影响。文献[19]提出一种直流下垂多级优化控制,采用PI反馈控制补偿电压跌落值。
为保证直流微电网母线电压的稳定,本文针对上述问题提出了一种计及直流微电网扰动抑制的残差动态分散补偿控制结构。在基于下垂控制的多台DC-DC变换器并联基础上,建立变换器并联状态空间模型。通过扰动抵消的方法求取基于残差的补偿控制器Q*(s),补偿信号直接作用于电压环的输出端。使用最小公倍数的方法对传统直流下垂控制造成的电压跌落进行补偿。采用小信号稳定性分析方法证明本文补偿控制器的稳定性。本文基于RTDS搭建数字物理实验平台,以相同与不同类型变换器并联为例进行实验验证。实验结果表明,本文所提控制结构简单,求取的补偿控制器阶次较低,能够加快分布式电源与负荷投切导致的动态电压波动响应速度,有效抑制了环流影响及交流侧电压不平衡状况导致的直流母线电压二倍频波动,有助于实现分布式电源的“即插即用”技术,维持了电压的一致性,保证直流母线电压的稳定。
根据图1可以得出直流母线功率为
 (1)
(1)式中,UDC、IDC、PDC分别为直流母线电压、电流与功率;PB、Ppv、Pwind分别为蓄电池、光伏、风机的输出功率;PAC为交流侧输入至直流侧的功率;RDC、RAC分别为直流负荷及交流等效负荷。
分布式电源和负荷的功率变化会导致直流母线电压出现电压波动等问题[10]。交流侧三相不平衡时,直流侧母线电压会出现二倍频纹波。当直流微电网中发生上述扰动问题时,因输出电压的变化,连接直流母线的各变换器之间出现暂态环流现象。多台DC-DC变换器并联结构如图2所示。
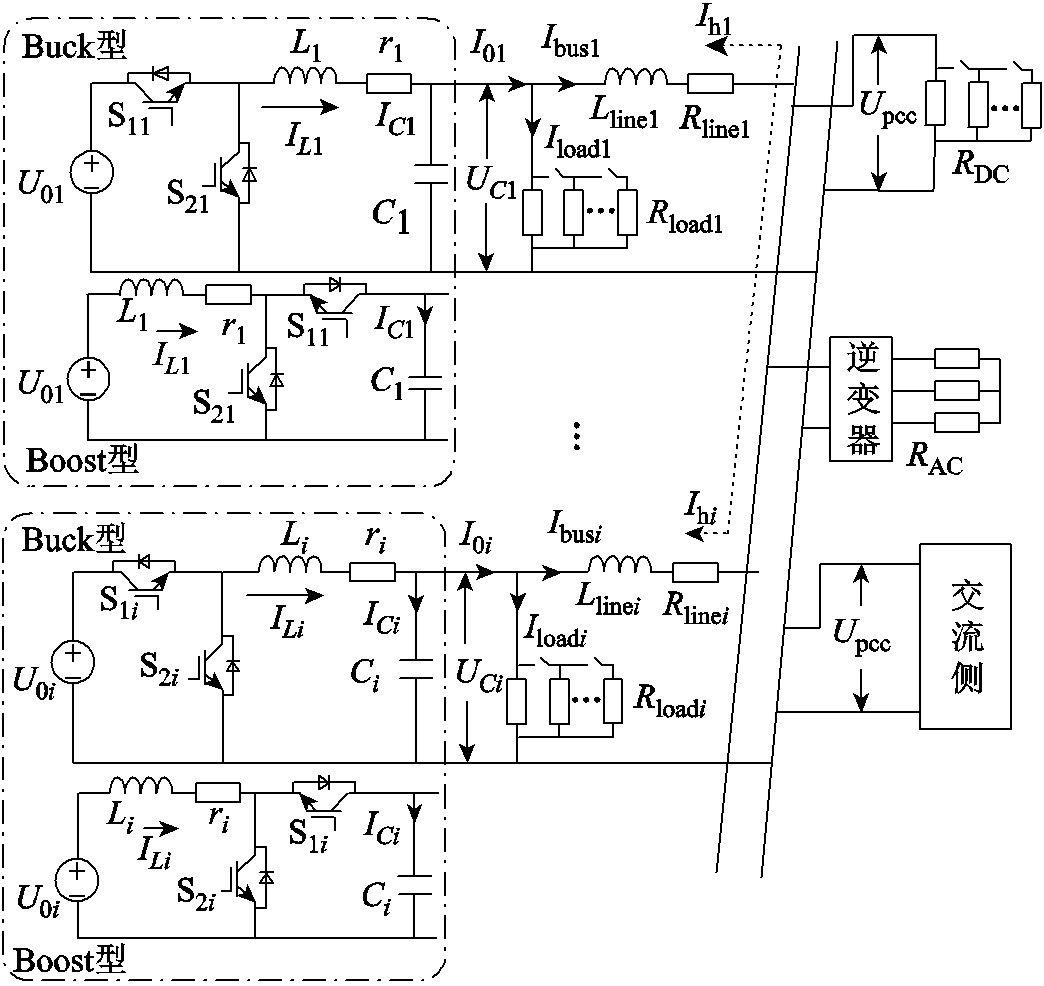
图2 直流微电网多DC-DC变换器并联结构图
Fig.2 Parallel structure diagram of multiple DC-DC converters in DC microgrid
图2中,S1i、S2i为开关管,Li为电感值,ri为电感内阻;Rloadi为本地负荷,Ci为电容值,ILi、ICi分别为流过变换器的电感电流和电容电流,I0i为变换器输出端口电流值,U0i为直流源输入值,UCi为输出端口电压,Llinei为线路电感,Rlinei为线路电阻,Ibusi为线路稳态电流,Ihi为环流,i=1,2,…,k。令R为母线所带负荷总和,Ibus为母线电流总和,根据基尔霍夫定律可求出i台变换器环流表达式为
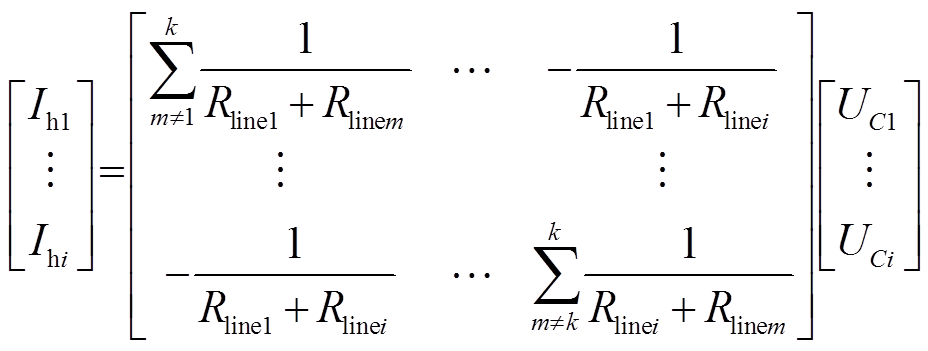 (2)
(2)由式(2)可以看出,环流实质上与变换器输出端口电压有关。系统处于稳态时UC1=UC2=…=UCi,此时系统中无环流。当系统中出现扰动时,各个变换器输出电压UC1≠UC2≠…≠UCi,此时环流出现。整体直流微电网中的扰动等效结构如图3所示。
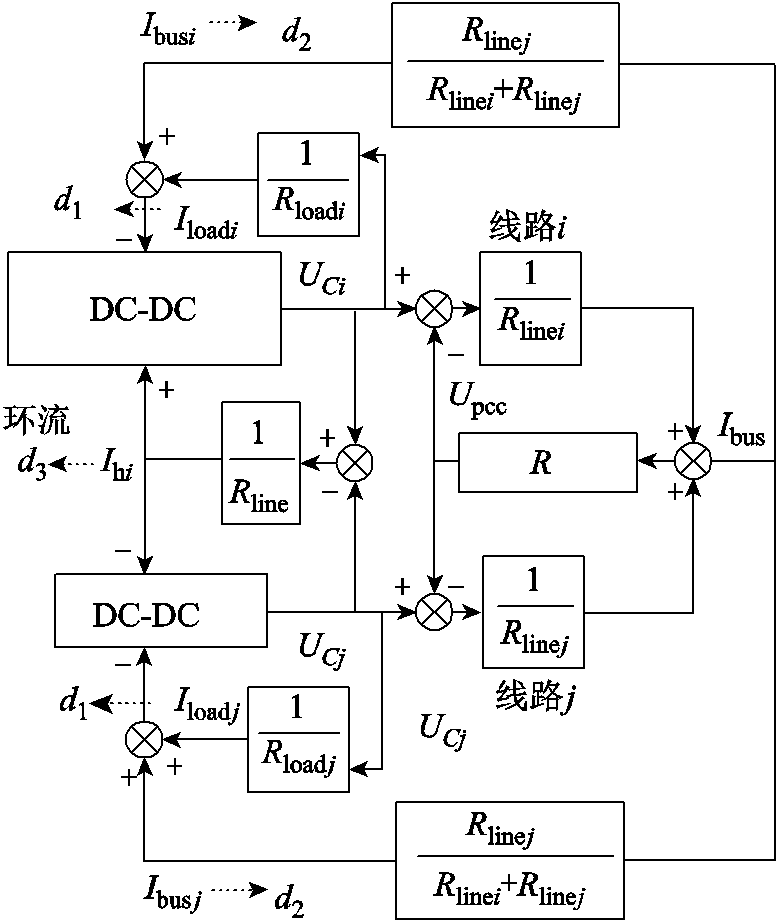
图3 直流微电网扰动等效结构图
Fig.3 Disturbance equivalent structure diagram of DC microgrid
图3中本地负荷进行投切操作时,会造成变换器输出电压和电流的波动,因此选取本地负荷电流Iloadi为扰动输入d1。直流母线中的扰动会通过线路影响到每个变换器,因此选取变换器线路电流稳态值Ibusi为扰动输入d2。为抑制环流对变换器的影响,定义线路电流暂态环流Ihj为扰动输入d3。抑制分布式电源与负荷投切、功率波动及二倍频纹波等扰动即可保持电压稳定、减弱环流。
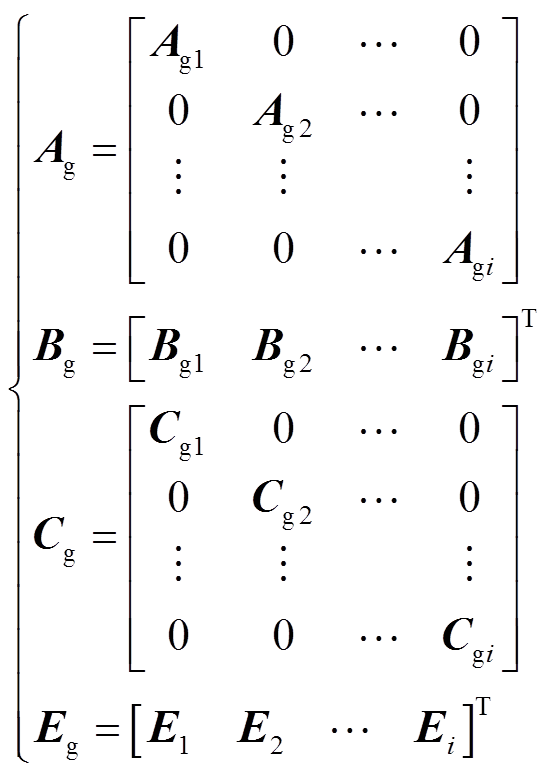
以图2所示的Buck型与Boost型双向DC-DC变换器并联模型为基础,多台双向DC-DC变换器并联的状态空间表达式皆可表示为
 (3)
(3) (4)
(4)
式中,xg=[xg1xg2 xgi]T为变换器并联系统状态量;yg=[yg1yg2 ygi]为系统输出量;ug=[ug1ug2 ugi]为系统输入量;ds1、ds2、ds3分别为本地负荷电流、线路电流稳态值与环流扰动,ds1=[d11d12 d1i],ds2=[d21d22 d2i],ds3=[d31d32 d3i]。
xgi]T为变换器并联系统状态量;yg=[yg1yg2 ygi]为系统输出量;ug=[ug1ug2 ugi]为系统输入量;ds1、ds2、ds3分别为本地负荷电流、线路电流稳态值与环流扰动,ds1=[d11d12 d1i],ds2=[d21d22 d2i],ds3=[d31d32 d3i]。
选取电感电流与电容电压为状态量,根据图2可得Buck型双向DC-DC变换器状态空间参数矩阵如式(5)所示,其输入输出及状态矩阵为:xgi=[UCiILi]T;ygi=[UCi];ugi=[Vr],Vr为电流环输出调制波;d1i=[Iloadi];d2i=[Ibusi];d3i=[Ihi]。
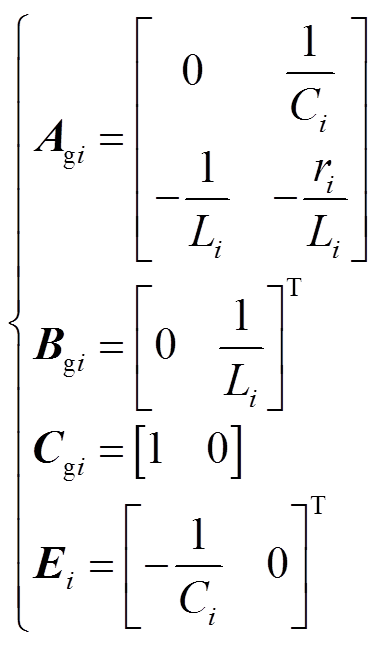 (5)
(5)Boost型双向DC-DC变换器为非最小相位系统,选取一个稳态工作点对其状态空间进行线性化。选取电感电流实际值与稳态值之差为状态量,根据图2中Boost型双向DC-DC变换器拓扑对式(5)中的参数矩阵进行修改,如式(6)所示。
 (6)
(6)
部分输入输出和状态量矩阵修改为
xgi=[Uci-Uciw ILi-ILiw]T ugi=D2i-D2iw
ygi=UCi-UCiw d1i=Iloadi-Iloadiw d2i=Ibusi-Ibusiw
式中,UCiw、ILiw、Iloadiw、Ibusiw、D2iw分别为稳态时对应的输出电压、电感电流、负载电流、线路电流稳态值、占空比。
残差信息常被用来进行系统故障定位与诊断,以及扰动的检测与抑制,其表达式为
 (7)
(7)式中,r(s)为残差;y(s)为系统实际输出值; 为输出估计值。
为输出估计值。
残差信息能够体现扰动和故障等因素对系统的影响程度。当系统不受扰动和故障影响时,r(s)=0;反之r(s)≠0。因此本文利用残差信息,设计相应的控制器实现扰动抑制。
采用极点配置计算观测器增益矩阵L,以Luenberger状态观测器为基础,建立扰动残差生成器,其表达式为
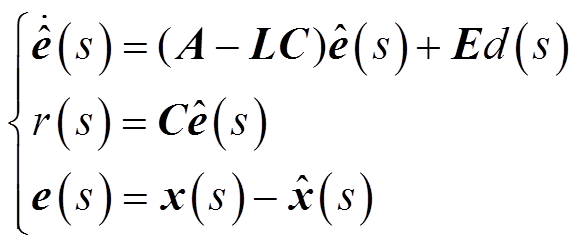 (8)
(8)式中,A、E、C分别为系统的状态矩阵、扰动输入矩阵、输出矩阵;d(s)为扰动输入值;x(s)为状态量; 为状态估计值。
为状态估计值。
根据鲁棒二重互质分解和尤拉参数稳定化控制器理论[20-21]可知
 (9)
(9)式中,u(s)为被控对象输入值;u0(s)为原控制器输出量;Q*(s)为补偿控制器。
在原系统稳定的情况下,将残差信息r(s)输入至补偿控制器Q*(s)中进行扰动的反向补偿。在式(9)的基础上设计了基于残差的双闭环动态补偿结构如图4所示,图中uk(s)为控制器K1(s)的输出。
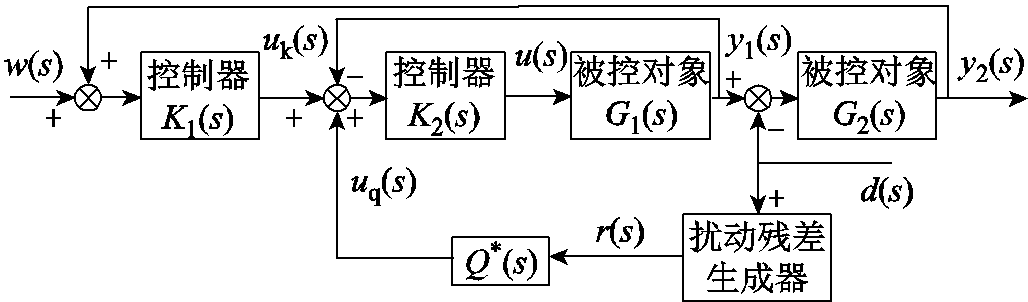
图4 基于残差的动态补偿结构
Fig.4 Dynamic compensation structure diagram based on residuals
当扰动d(s)出现时,补偿控制器Q*(s)会根据扰动迅速输出补偿信号uq(s),经过电流内环进行扰动抑制补偿。根据图4得到基于残差的动态补偿结构的整体传递函数表达式为
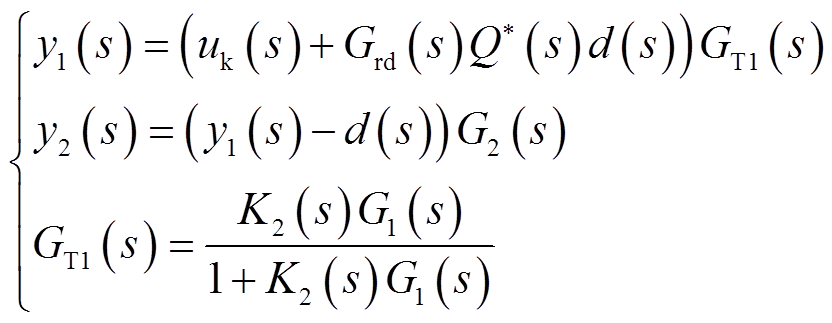 (10)
(10)式中,Grd(s)为扰动残差生成器的传递函数;Q*(s)为待求的补偿控制器;GT1(s)为双闭环控制结构中内环闭环传递函数。
为保证扰动抑制效果,需设计合适的补偿控制器Q*(s)。控制器输出的补偿信号经过电流内环之后进行扰动抵消,因此图4的补偿结构可以等效为图5所示。
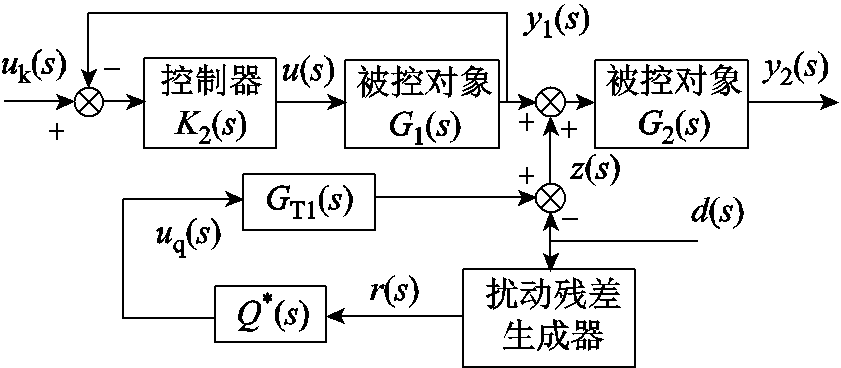
图5 动态补偿结构等效框图
Fig.5 Equivalent block diagram of dynamic compensation structure
为直观表示补偿控制器求解过程,扰动补偿过程可单独表示为图6。
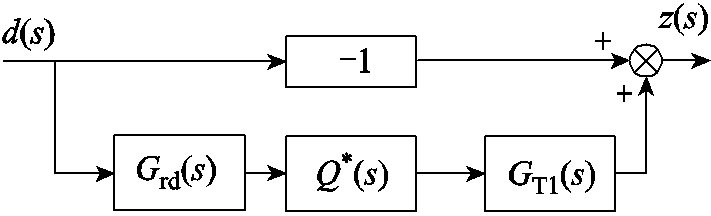
图6 补偿控制器求解示意图
Fig.6 Compensation controller solution diagram
当图6中z(s)为0时,控制器输出的补偿量将扰动d(s)完全抵消,此时可求得补偿控制器Q*(s)的最优值,其表达式为
 (11)
(11)根据图5与式(11)可知,本文所提的补偿结构和补偿控制器求解较为简单,同时在补偿控制器求解过程中只考虑电流内环,有效地避免了补偿信号通过反馈环对控制器产生的新的影响。在变换器并联的基础上,本文采用此动态补偿结构对扰动进行抑制补偿。
将基于残差的动态补偿结构应用于双向DC-DC变换器中的控制结构中,如图7与图8所示。
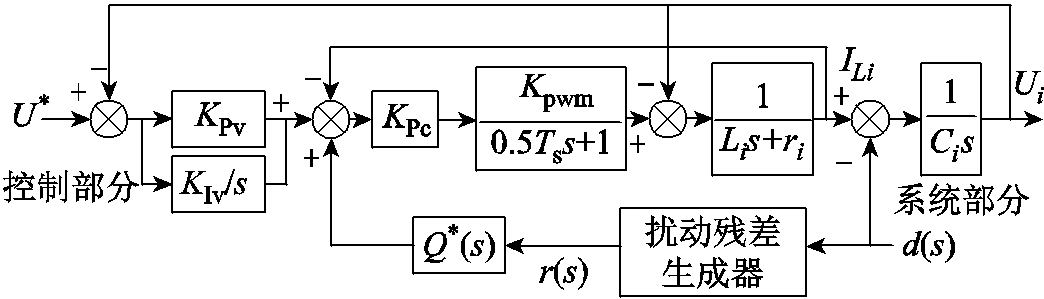
图7 Buck型双向DC-DC变换器动态分散补偿框图
Fig.7 Buck type bidirectional DC-DC converter dynamic decentralized compensation block diagram
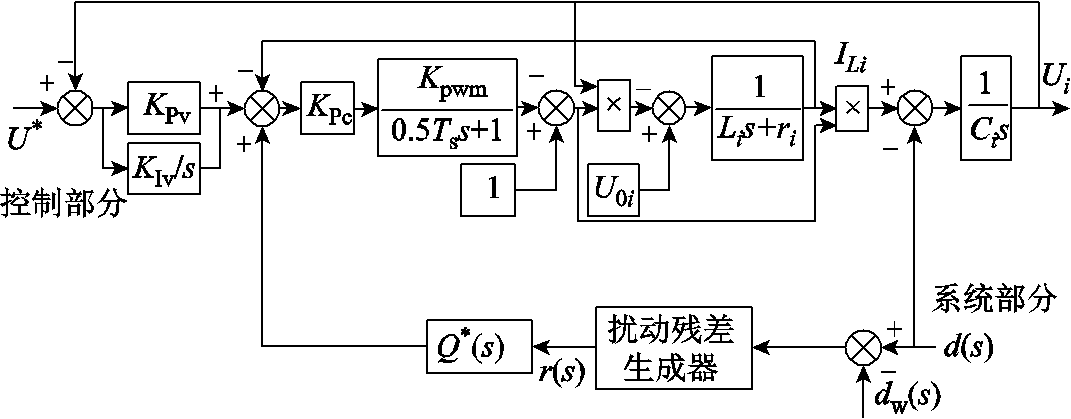
图8 Boost型双向DC-DC变换器动态分散补偿结构
Fig.8 Dynamic decentralized compensation structure of Boost bidirectional DC-DC converter
图7与图8中,KPv为电压环比例增益;KIv为电压环积分增益;KPc为电流环比例增益;Kpwm为PWM等效增益;Ts为采样周期;d(s)表示变换器自身的本地负荷电流Iloadi、线路电流稳态值Ibusi及环流Ihi三种扰动类型。这三种扰动经过扰动残差生成器生成残差,图8中扰动残差生成器基于Boost型双向DC-DC变换器线性化之后的模型建立,因此输入还需减去扰动稳态值dw(s)。残差通过补偿控制器Q*(s)产生补偿信号,抑制扰动对各变换器的影响。本文所提结构不影响各变换器的扰动输入,因此该结构为分散式的动态扰动抑制结构。
以第i台变换器为例,根据图7可得Buck型双向DC-DC变换器电流内环闭环传递函数为
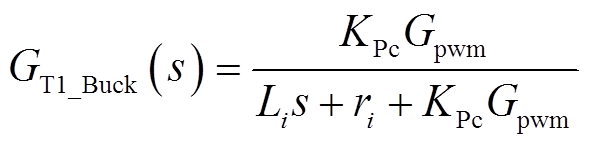 (12)
(12)式中,Gpwm=Kpwm/(0.5Tss+1)。根据PWM原理,当载波幅值等于电压源输入值时,Kpwm等效为1。
Boost型双向DC-DC变换器属于非最小相位系统,其线性化之后的系统状态空间转传递函数时会出现正零点,但本文提出的补偿结构只考虑电流内环,避免在补偿控制器计算过程中正零点转换为正极点的问题,根据图8可得其电流内环传递函数为
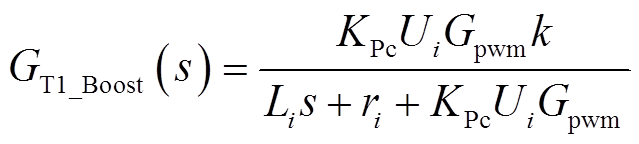 (13)
(13)式中,k=UCi/U0i。
根据极点配置可知状态转移矩阵Lk是一个2×1的矩阵Lk=[lk1lk2]T,Buck型双向DC-DC变换器鲁棒扰动残差生成器的传递函数表达式为
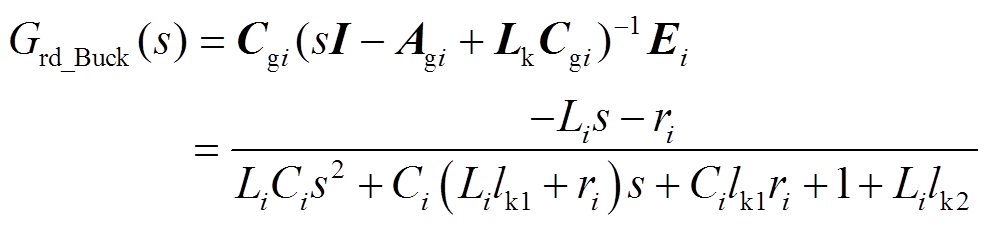 (14)
(14)以线性化之后Boost型双向DC-DC变换器状态空间模型为基础建立扰动残差生成器,并将其转换为传递函数形式,同样采取极点配置的方法计算状态转移矩阵Lt=[lt1lt2]T,假设稳态时占空比D2iw=0.5,Boost型双向DC-DC变换器扰动残差生成器传递函数表达式为
 (15)
(15)
根据图6的补偿控制器求解结构,双向DC-DC变换器动态补偿控制器求解示意图如图9所示。
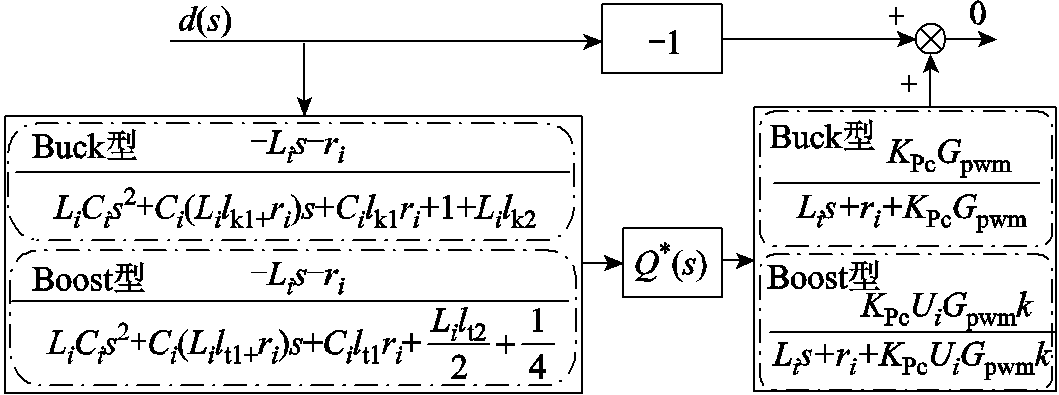
图9 双向DC-DC变换器动态补偿控制器求解
Fig.9 Solution of dynamic compensation controller for bidirectional DC-DC converter
由图9可以求得Buck型双向DC-DC变换器动态补偿控制器的表达式为
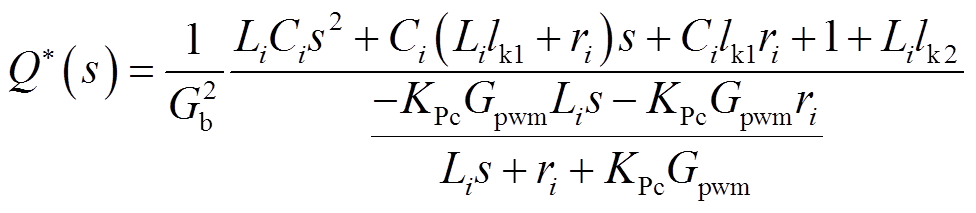 (16)
(16)类似的Boost型双向DC-DC变换器动态补偿控制器的表达式为
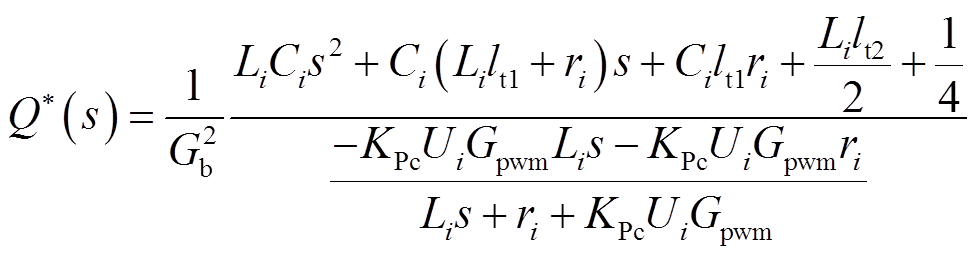 (17)
(17)
式(16)和式(17)中Gb=δs+1,δ为数值极小的补偿系数。由此可以看出本文提出的补偿结构利于补偿控制器求解且计算的控制器阶数较小。
直流微电网中各变换器多采用直流下垂控制[22]以保证功率分配。直流下垂控制与输出线路电流稳态值有关,因此本地负荷投切并不影响变换器自身的下垂控制。本文提出的动态扰动补偿结构通过调节电感电流来抑制输入至变换器的扰动电流,并没有改变扰动电流值,当线路电流稳态值因发生扰动而变化时,直流下垂可以根据电流的变化重新调节电压环给定。因此本文提出的控制策略并不影响直流下垂特性。
由于受下垂系数与线路电阻的影响,传统直流下垂控制存在固有的电压跌落问题,当负荷发生扰动时,电压跌落问题更加严重,因此采用最小公倍数的方法,对传统直流下垂进行电压补偿,即
 (18)
(18)式中,U∆i为电压补偿量。
假设线路电阻已知的情况下,求取电压补偿量的流程如图10所示,具体步骤为:
(1)求取各变换器下垂系数及线路电阻之和Zi。
(2)计算Zi中每个数值与其最小值Zmin的比值bi;计算bi的最小公倍数g。
(3)求解每个变换器输出电流占母线电流的份数hi,计算电压补偿量。
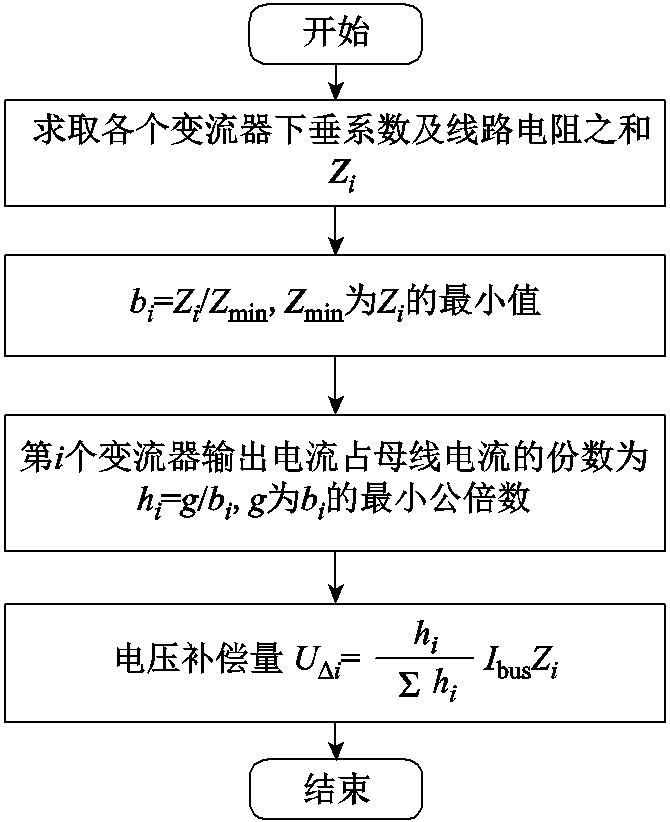
图10 电压补偿量求解流程
Fig.10 Flow chart of voltage compensation
采用直流下垂控制的计及直流微电网扰动抑制的残差动态分散补偿控制策略整体结构如图11所示。当系统出现分布式电源与负荷投切、交流侧电压不平衡等扰动时,采集扰动电流至扰动残差生成器生成残差,补偿控制器根据残差快速生成补偿信号以抑制扰动,同时电压跌落补偿控制保证了直流母线在发生上述扰动情况下电压的一致性。
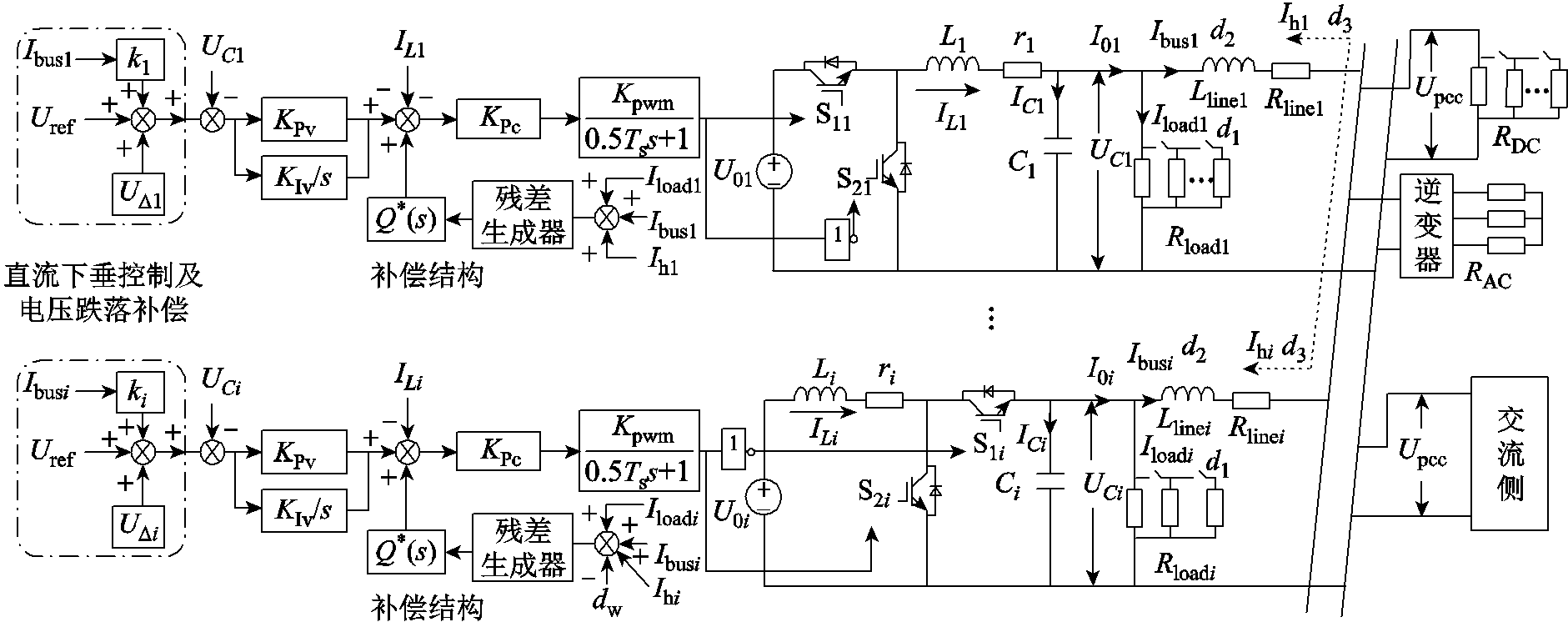
图11 计及直流微电网扰动抑制的残差动态分散补偿控制结构
Fig.11 Residual dynamic decentralized compensation control structure considering disturbance suppression of DC microgrid
对于微电网这样的动态系统,当系统出现小扰动时,系统非线性方程在稳态工作点处可以线性化得到近似线性状态方程为
 (19)
(19)式中,Dx为线性化状态量;Du为线性化输入量。
由现代控制理论及李雅普诺夫定理可知,系统的稳定性取决于状态矩阵A的特征值,且当状态矩阵A的特征值全部分布在复平面左半平面上时系统稳定[23]。具体推导过程及状态参数矩阵见附录。
双向DC-DC变换器在加入计及直流微电网扰动抑制的残差动态分散补偿控制结构的完整小信号模型A矩阵如式(20)所示。
采用特征值分析法进行小信号稳定性分析,双向DC-DC变换器动态补偿结构特征值分布如图12所示。
从图12中可以看出,加入本文所提的动态分散补偿控制结构的双向DC-DC变换器整体系统A矩阵的所有特征根都分布在复平面左半平面。因此证明了本文所提的并联变换器动态分散补偿控制不影响原系统的稳定,保证了整体结构的稳定性。
 (20)
(20)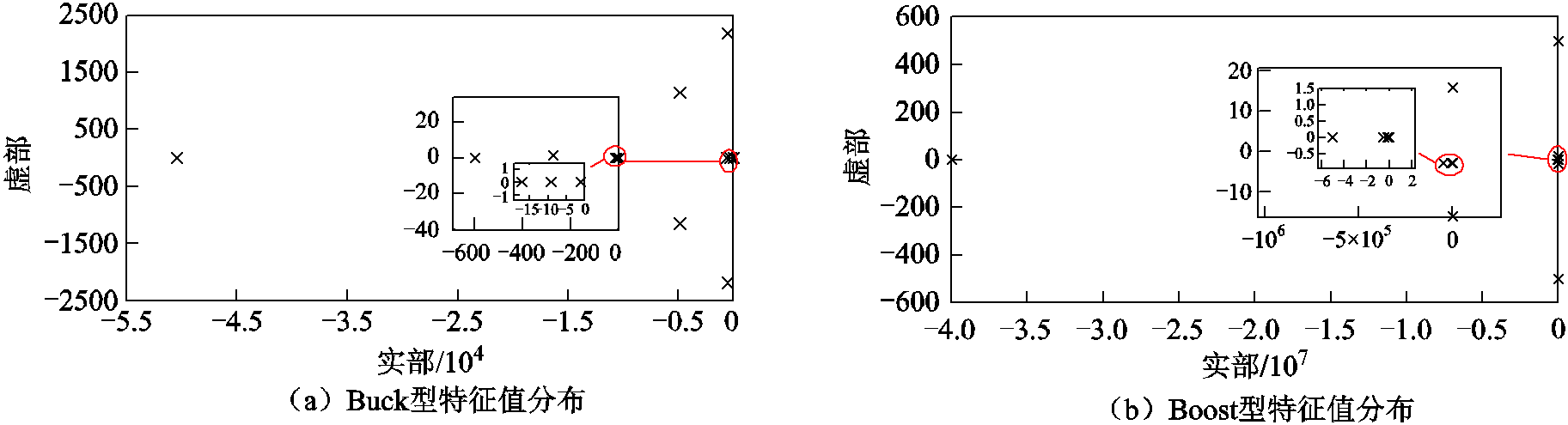
图12 双向DC-DC变换器动态补偿结构特征值分布
Fig.12 Distribution of eigenvalues of dynamic compensation structure of bidirectional DC-DC converter
为验证本文控制方法的有效性,本文基于RTDS搭建了数字物理闭环实验平台如图13所示。

图13 RTDS物理闭环实验平台
Fig.13 RTDS physics closed loop experimental platform
平台利用RTDS用户软件RSCAD搭建仿真模型,利用GTAO模块采集电压电流信号,将采集到的数据输入至DSP控制器中,DSP输出控制信息经过上位机输入至RTDS中。实验分为两部分,第一部分为Buck型双向DC-DC变换器并联实验,第二部分为Buck型与Boost型双向DC-DC变换器并联实验。
按图14搭建实验拓扑,系统参数见表1~表3。
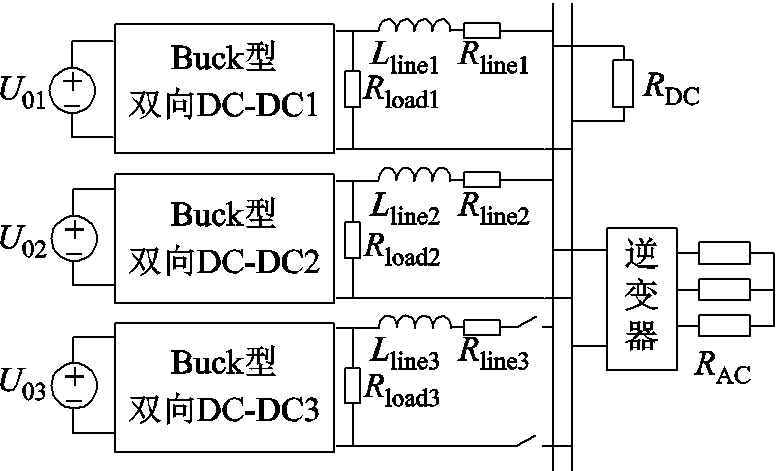
图14 Buck型双向DC-DC变换器并联实验拓扑
Fig.14 Parallel experiment topology diagram of Buck type bidirectional DC-DC converter
表1 Buck型双向DC-DC变换器参数
Tab.1 Buck type bidirectional DC-DC converter parameters
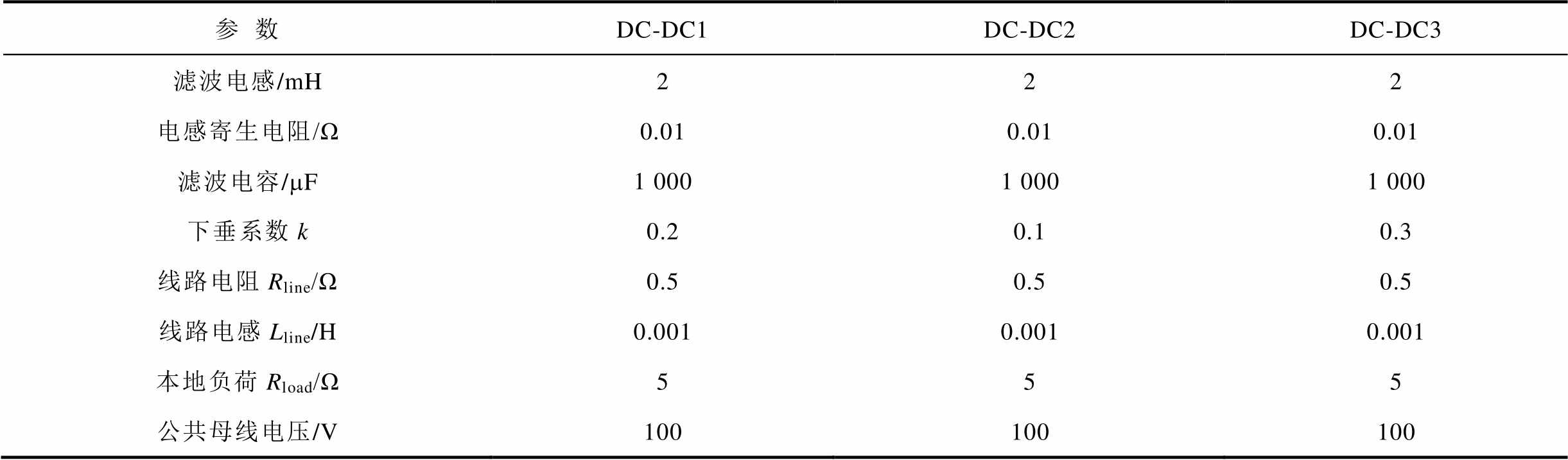
参数DC-DC1DC-DC2DC-DC3 滤波电感/mH222 电感寄生电阻/Ω0.010.010.01 滤波电容/mF1 0001 0001 000 下垂系数k0.20.10.3 线路电阻Rline/Ω0.50.50.5 线路电感Lline/H0.0010.0010.001 本地负荷Rload/Ω555 公共母线电压/V100100100
表2 Buck型双向DC-DC变换器控制器参数
Tab.2 Buck type bidirectional DC-DC converter controller parameters

参数数值 电压环比例系数0.5 电压环积分系数40 电流环比例系数10 电流环积分系数0
表3 逆变器参数
Tab.3 Inverter parameters

逆变器参数数值控制参数数值 滤波电感/mH2电压环比例系数10 寄生电阻/Ω0.01电压环积分系数40 滤波电容/mF500电流环比例系数10 输出电压/V50电流环积分系数0
5.1.1 本地负荷投切实验
设定变换器1的本地负荷在0.6s时切入一个5Ω负荷,1.15s时切出一个5Ω负荷,直流母线电压波形对比如图15所示。
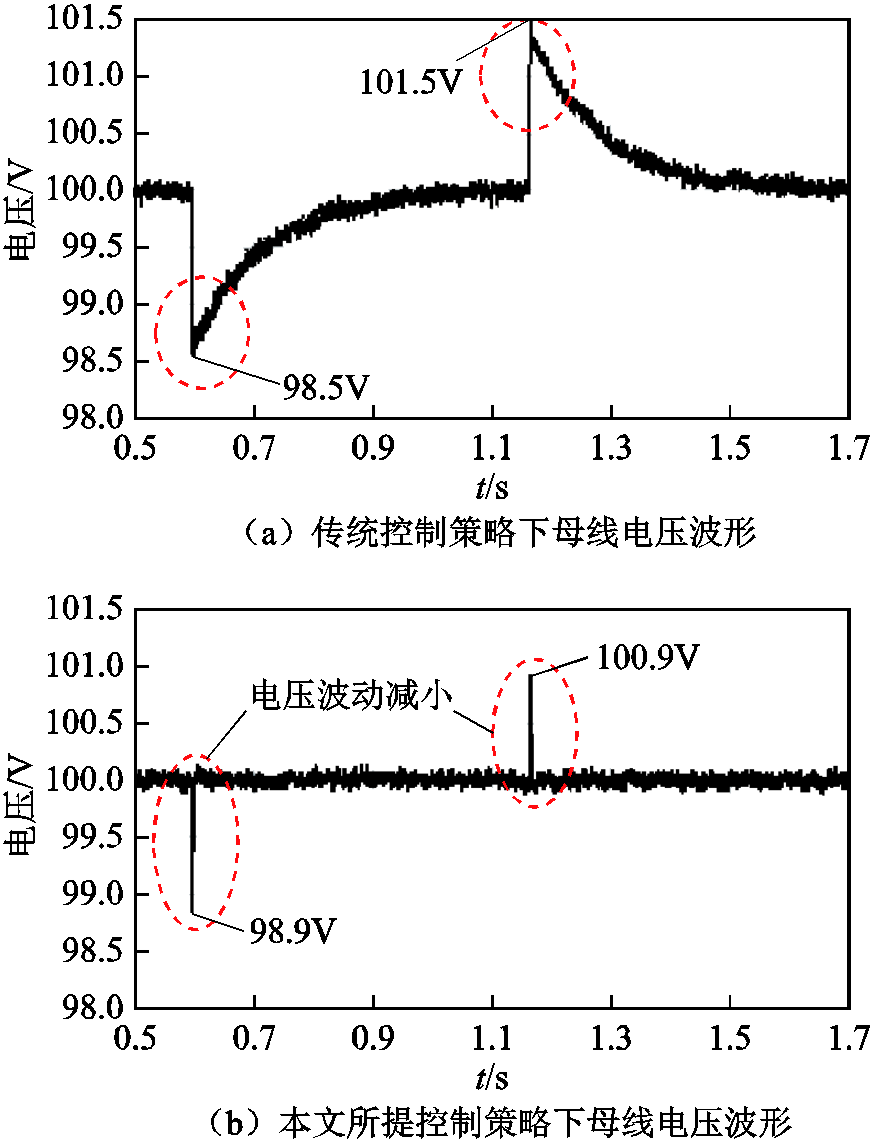
图15 本地负荷投切时直流母线电压波形对比
Fig.15 Comparison of DC bus voltage waveforms during local load switching
从图15中可以看出,在传统直流下垂控制下,0.6s时本地负荷切入,母线电压暂降至98.5V左右,1.15s时本地负荷切出,母线电压暂升至101.5V,经过0.3s左右调节至稳态值。加入本文所提动态分散补偿结构后,0.6s时母线电压暂降至98.9V左右,经过0.04s调节至稳态值。1.15s时母线电压暂升至100.9V,经过0.03s调节至稳态值。
各变换器线路电流波形如图16所示。从图16中可以看出,0.6s时本地负荷切入,变换器1电流暂降至1A左右,变换器2电流暂升至9A左右,经过0.3s调节至稳态值。1.15s时本地负荷切出,变换器1电流暂升至6A左右,变换器2电流暂降至4.5A左右,经过0.3s左右调节至稳态值。加入本文所提动态分散补偿结构后,0.6s时变换器1电流暂降至2A左右,变换器2电流暂升至8A,经过0.04s调节至稳态值。1.15s时变换器1电流暂升至5A,变换器2电流暂降至5.5A,经过0.03s调节至稳态值。实验表明,本文所提出的动态分散补偿控制策略能够有效地抑制在负荷变化情况下的电压波动幅值,加快了电压和电流恢复至稳态值的动态响应时间,减小了环流的影响。
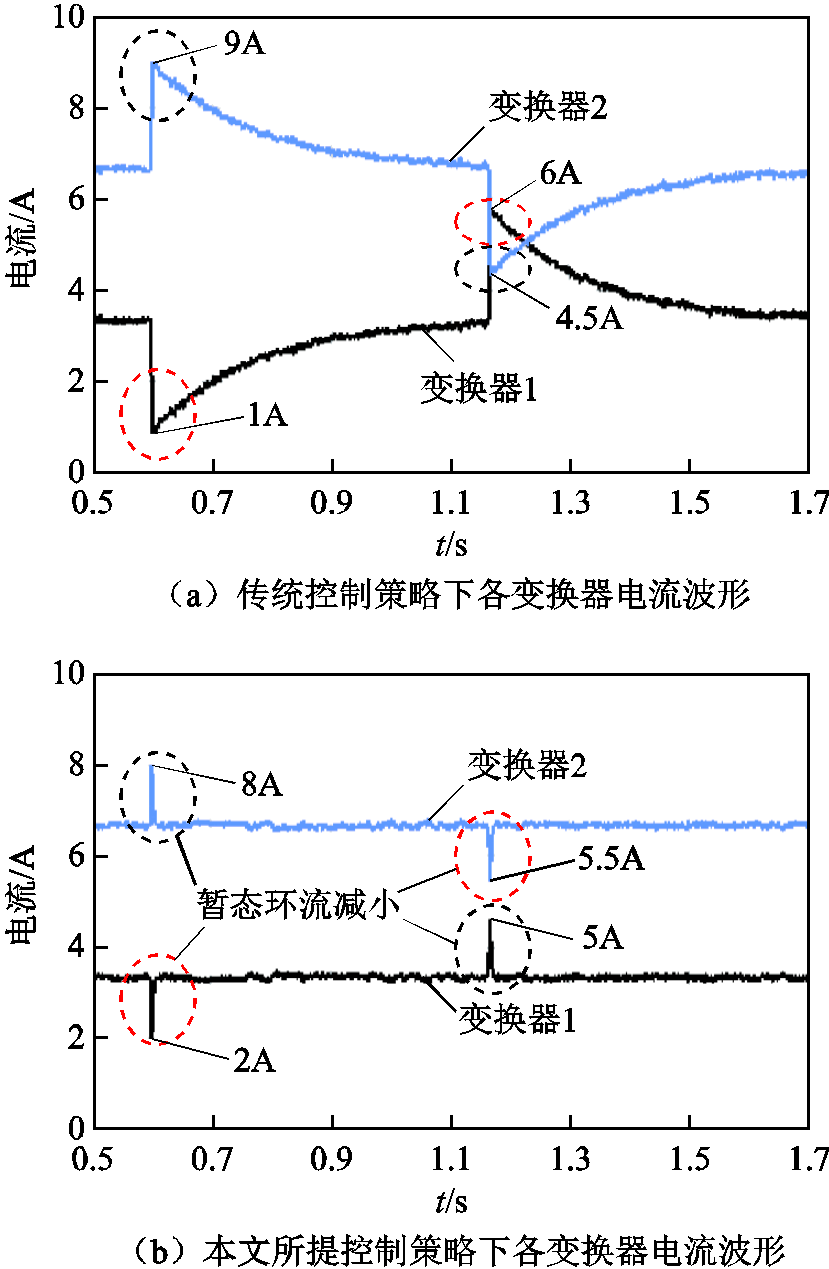
图16 本地负荷投切时变换器线路电流波形对比
Fig.16 Comparison of converter circuit current waveforms when local load is switched on and off
5.1.2 公共负荷投切实验
设定在0.6s时公共直流负荷切入10Ω负荷,1.15s时公共负荷切出10Ω负荷,直流母线电压波形对比如图17所示。从图17中可以看出,在传统直流下垂控制下,0.6s公共母线负荷切入,电压暂降至98.5V左右,1.15s公共母线负荷切出,电压暂升至101.5V,经过0.3s调节至稳态值。加入本文所提动态分散补偿结构后,0.6s时电压暂降至98.5V左右,1.15s时电压暂升至101.5V,经过0.05s调节至稳态值。各变换器线路电流运行波形对比如图18 所示,在传统直流下垂控制下,0.6s时变换器1电流上升至6.75A左右,变换器2电流上升至13.5A左右,1.15s时变换器1电流下降至3.3A左右,变换器2电流下降至6.7A左右,经过0.3s调节至稳态值。
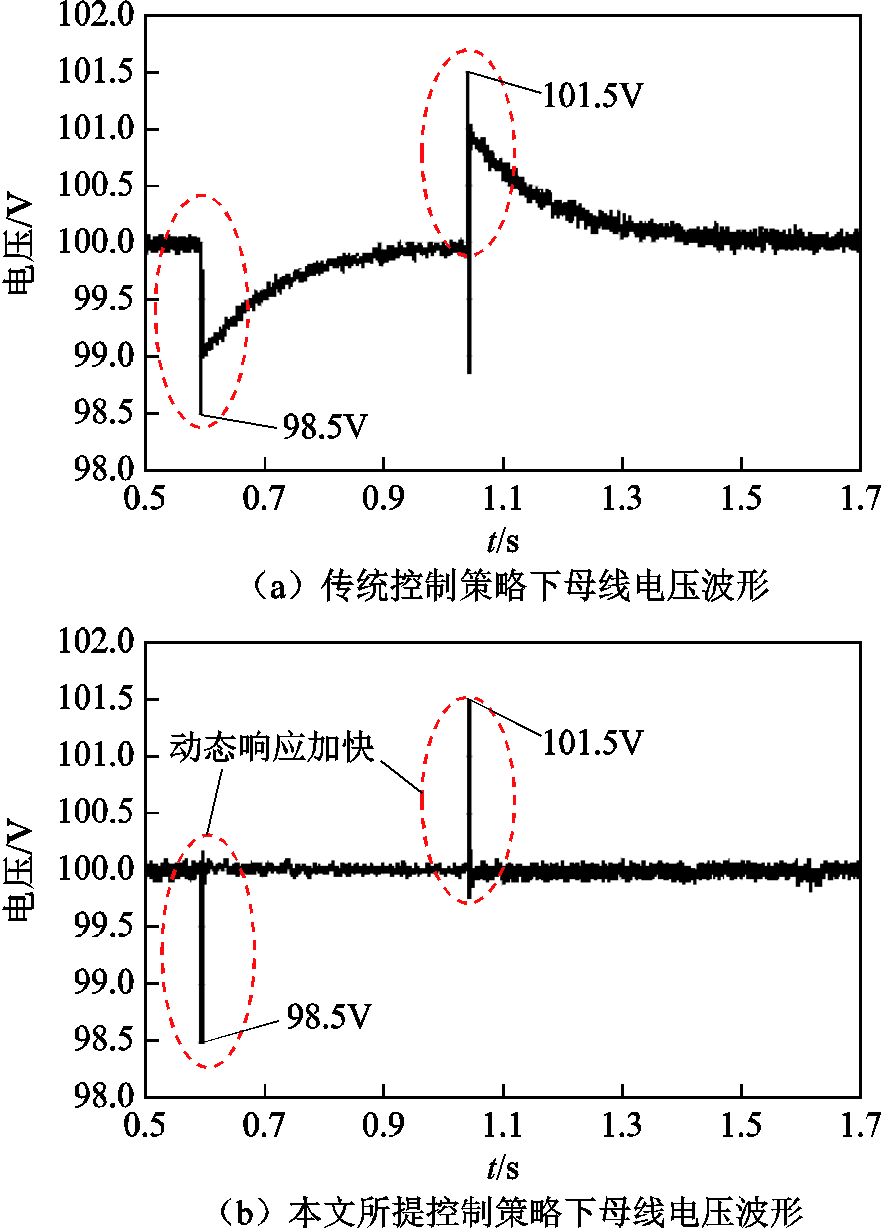
图17 公共负荷投切时直流母线电压波形对比
Fig.17 Comparison of DC bus voltage waveforms during public load switching
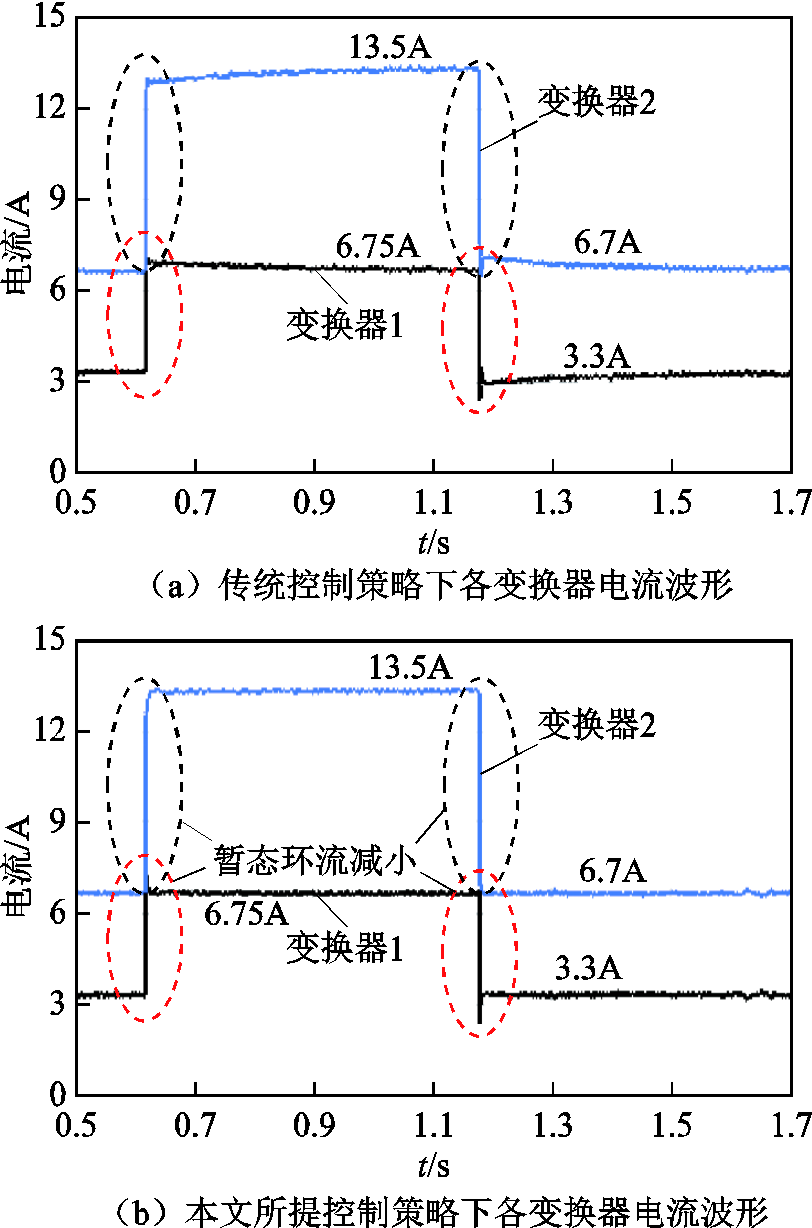
图18 公共负荷投切时变换器线路电流波形对比
Fig.18 Comparison of converter line current waveforms when public load is switched on and off
加入动态分散补偿结构后,0.6s时变换器1电流上升至6.75A左右,变换器2电流上升至13.5A左右,经过0.05s调节至稳态值。1.15s变换器1电流下降至3.3A左右,变换器2电流下降至6.7A左右,经过0.05s调节至稳态值。实验表明,本文所提出的动态分散补偿控制策略加快了电压电流恢复至稳态值的动态响应时间,有效地减小了环流的影响。
5.1.3 纹波实验
交流负荷通过逆变器与直流母线相连,当交流负荷由于故障等原因出现电压不平衡现象时,会使直流母线电压出现二倍频的波动。正常时交流侧负荷为ABC三相1Ω的平衡负荷,0.6s时C相负荷切出,交流负荷变为不平衡负荷,1.15s时恢复成正常三相负荷。在传统控制与本文所提控制结构下的直流母线电压运行波形对比如图19所示。
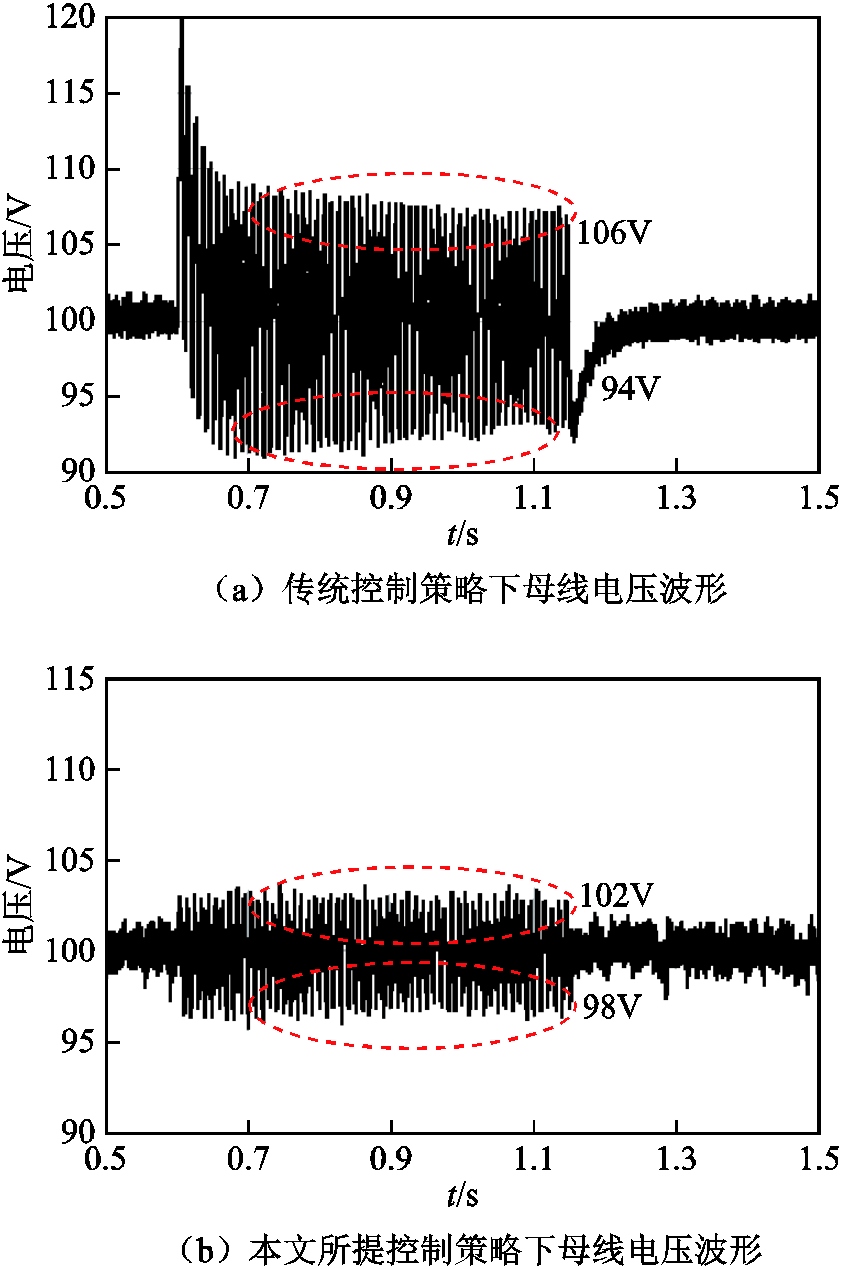
图19 交流侧电压不平衡时直流母线电压波形对比
Fig.19 Comparison of DC bus voltage waveform when AC side voltage is unbalanced
从图19中可以看出,当交流负荷发生不平衡状态时,直流母线出现幅值为±6V的波动,波动频率为100Hz。加入动态分散补偿结构后波动幅值变为±2V。实验表明,本文所提出的动态补偿控制策略减小了直流电压二倍频波动的幅值,同时加快了不平衡负荷变化时的动态响应,有效避免对设备的危害。
5.1.4 双向DC-DC变换器投切实验
三台变换器并联,0.6s时第3台变换器切入,1.2s时第3台变换器切出。传统控制策略下的直流母线电压运行波形对比如图20所示。
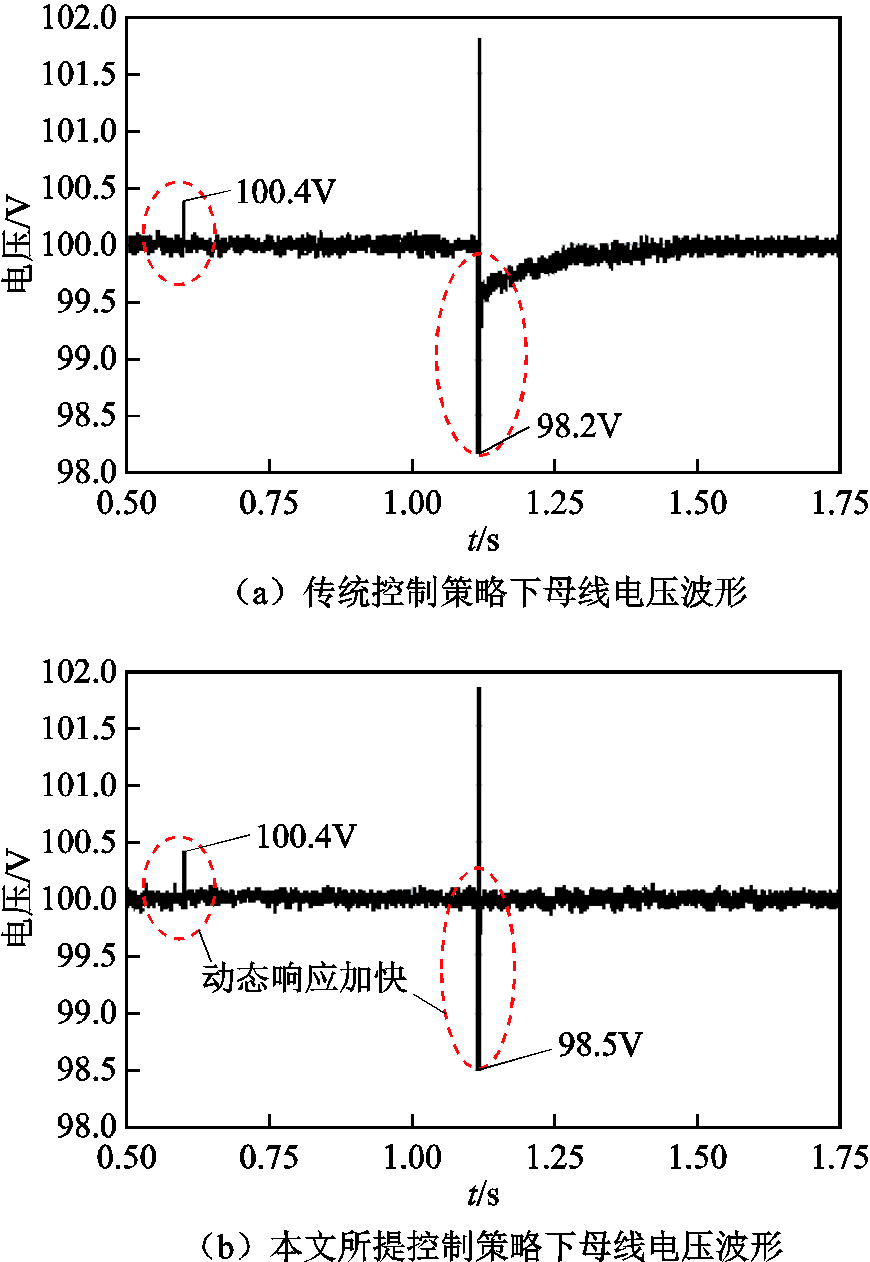
图20 变换器投切时直流母线电压波形对比
Fig.20 Comparison of DC bus voltage waveforms during converter switching
从图20中可以看出,在传统直流下垂控制下,0.6s变换器切入,电压变化值极小。1.15s变换器切出,电压暂降至98.2V左右,经过0.2s调节至稳态值。加入动态分散补偿结构后,0.6s变换器切入,电压变化值极小,1.15s变换器切出,电压暂降至98.5V左右,经过0.02s左右调节至稳态值。
各变换器线路电流运行波形对比如图21所示,0.6s时变换器1电流下降至2A左右,变换器2电流下降至4A左右,经过0.3s调节至稳态值。1.2s时变换器1电流上升至3.5A左右,变换器2电流上升至6.7A左右,经过0.2s调节至稳态值。加入动态分散补偿结构后,0.6s变换器1电流下降至2A左右,变换器2电流下降至4A左右,经过0.05s调节至稳态值。1.2s时变换器1电流上升至3.5A左右,变换器2电流上升至6.7A左右,经过0.05s调节至稳态值。实验表明,本文所提出的动态补偿控制策略能够有效抑制DC-DC变换器投切情况下的电压波动,加快了电压电流恢复至稳态值的动态响应时间,减小了环流的影响。
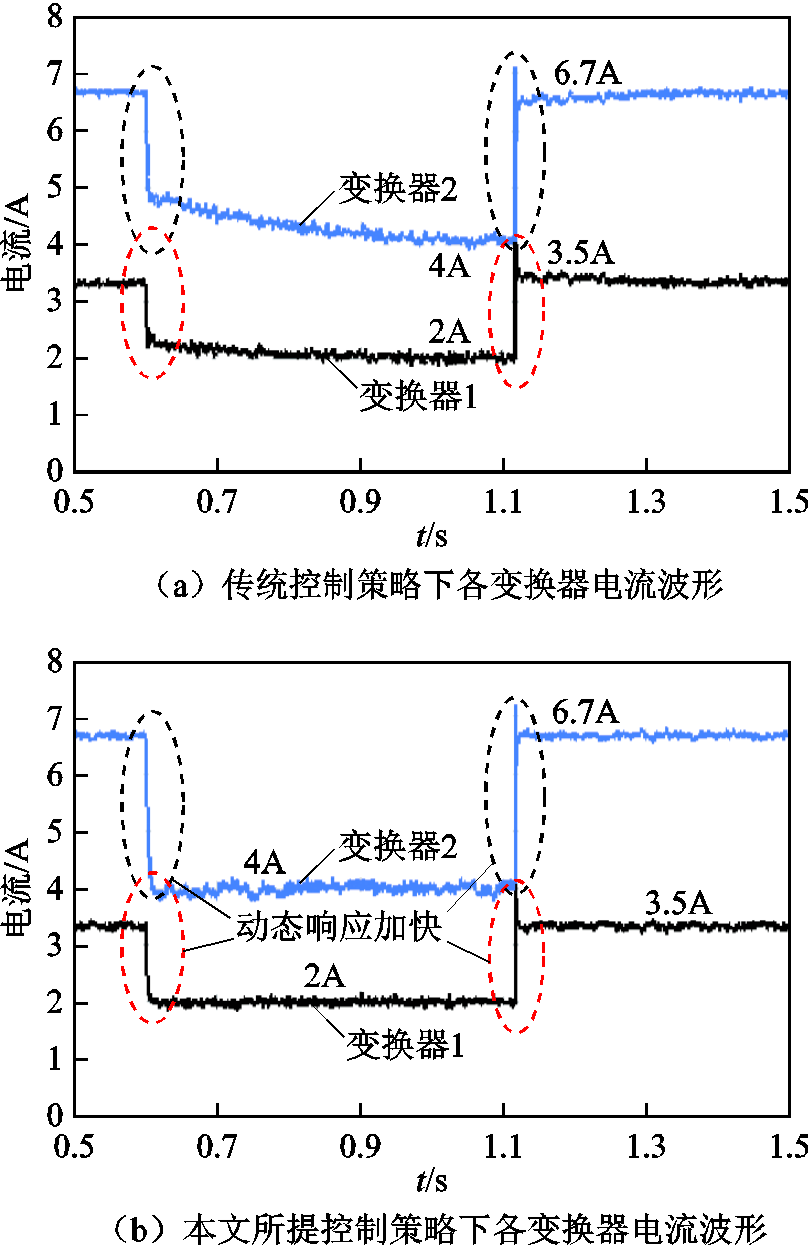
图21 变换器投切时变换器线路电流波形对比
Fig.21 Comparison of converter circuit current waveforms when the converter is switched on and off
以一台Boost型双向DC-DC变换器并联与两台Buck型双向DC-DC变换器为例,实验拓扑如图22所示,系统参数见表4和表5。
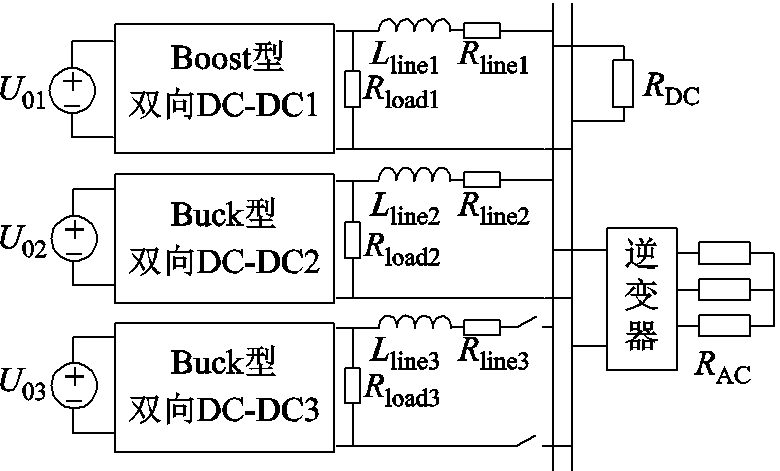
图22 两种类型双向DC-DC变换器并联实验拓扑
Fig.22 Two types of bidirectional DC-DC converter parallel experiment topology diagram
5.2.1 本地负荷投切实验
设定Buck型双向DC-DC变换器的本地负荷在0.6s时切入一个5Ω负荷,1s时切出一个5Ω负荷,直流母线电压运行波形如图23所示。
表4 两类双向DC-DC变换器参数
Tab.4 Two types of bidirectional DC-DC converter parameters
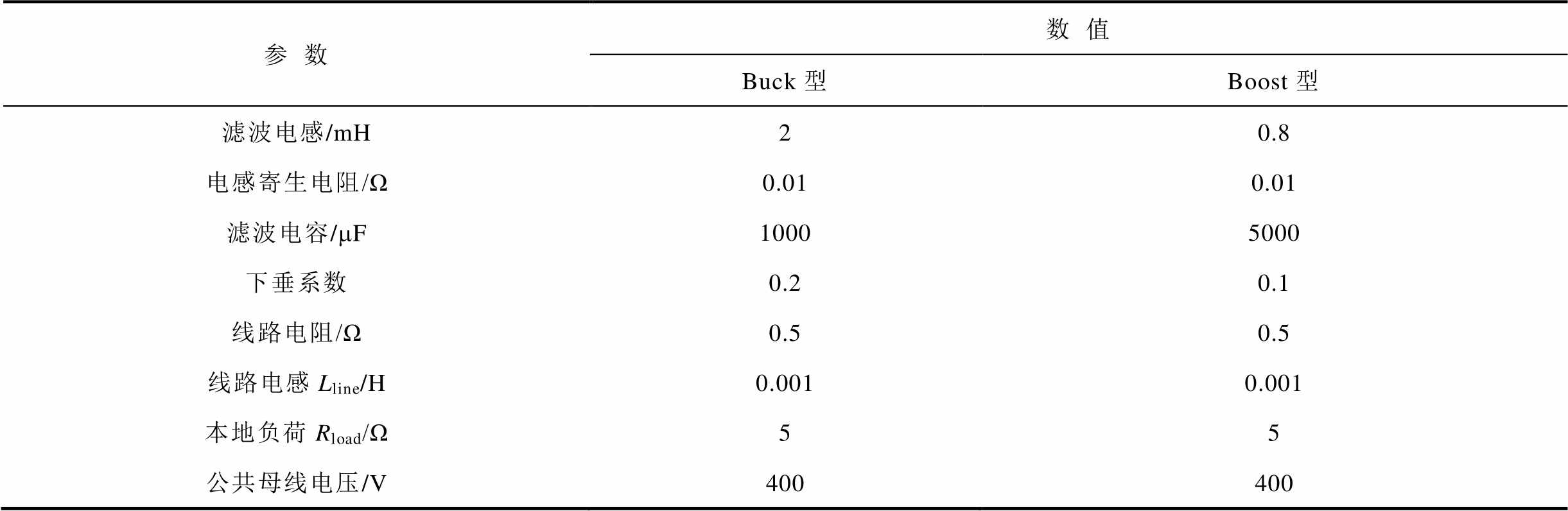
参数数值 Buck型Boost型 滤波电感/mH20.8 电感寄生电阻/Ω0.010.01 滤波电容/mF10005000 下垂系数0.20.1 线路电阻/Ω0.50.5 线路电感Lline/H0.0010.001 本地负荷Rload/Ω55 公共母线电压/V400400
表5 两类双向DC-DC变换器控制器参数
Tab.5 Two types of bidirectional DC-DC converter controller parameters

参数数值 Buck型Boost型 电压环比例系数0.50.5 电压环积分系数4025 电流环比例系数100.5 电流环积分系数00
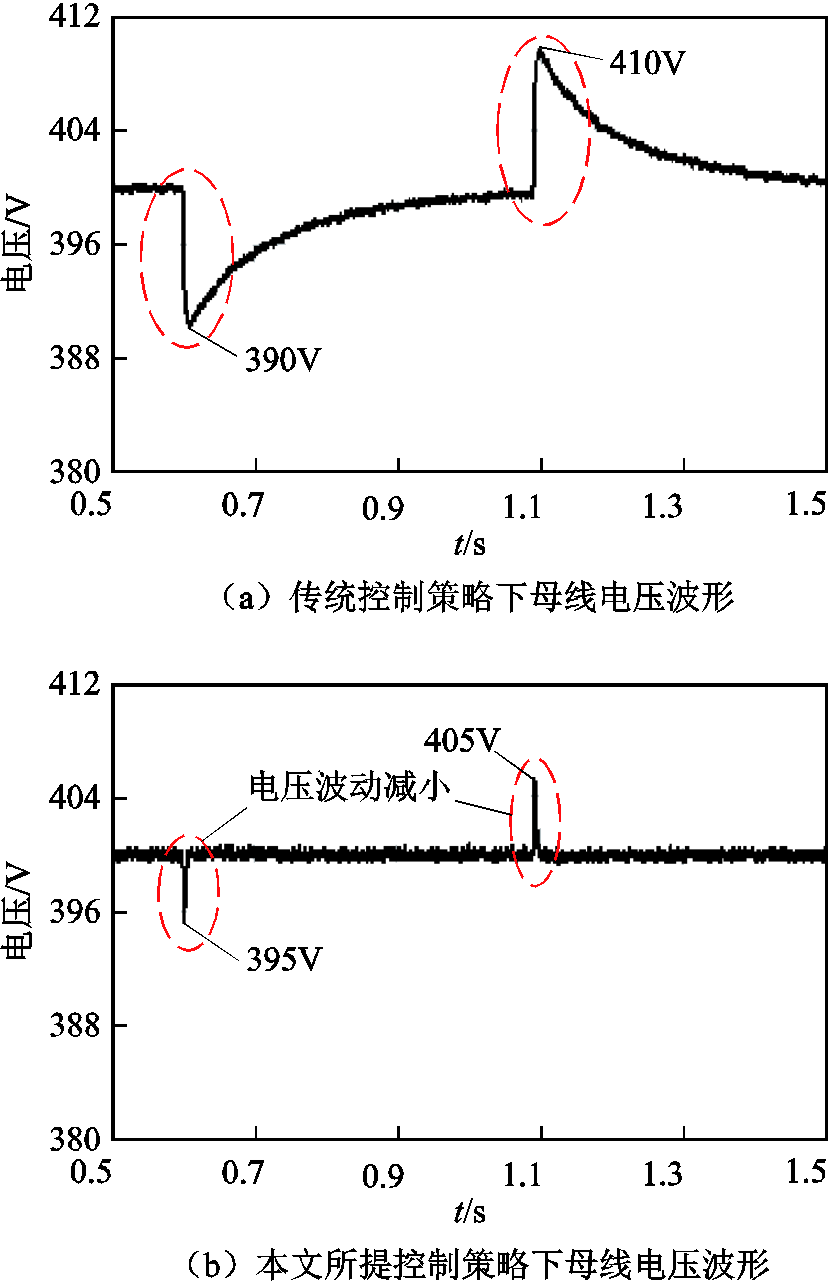
图23 本地负荷投切时直流母线电压波形对比
Fig.23 Comparison of DC bus voltage waveforms during local load switching
从图23中可以看出,在传统直流下垂控制下,0.6s时本地负荷切入,母线电压暂降至390V左右,经过0.3s调节至稳态值。1s时本地负荷切出,母线电压暂升至410V,经过0.3s左右调节至稳态值。加入本文所提动态分散补偿结构后0.6s时本地负荷切入,母线电压暂降至395V左右,经过0.03s调节至稳态值。1s时本地负荷切出,母线电压暂升至405V,经过0.03s左右调节至稳态值。
各变换器线路电流运行波形如图24所示,在传统直流下垂控制下,0.6s时Boost型变换器电流暂升至35A左右,Buck型变换器电流暂降至43A左右,经过0.3s调节至稳态值。1s时Boost型变换器电流暂降至20A左右,Buck型变换器电流暂升至62A左右,经过0.3s左右调节至稳态值。
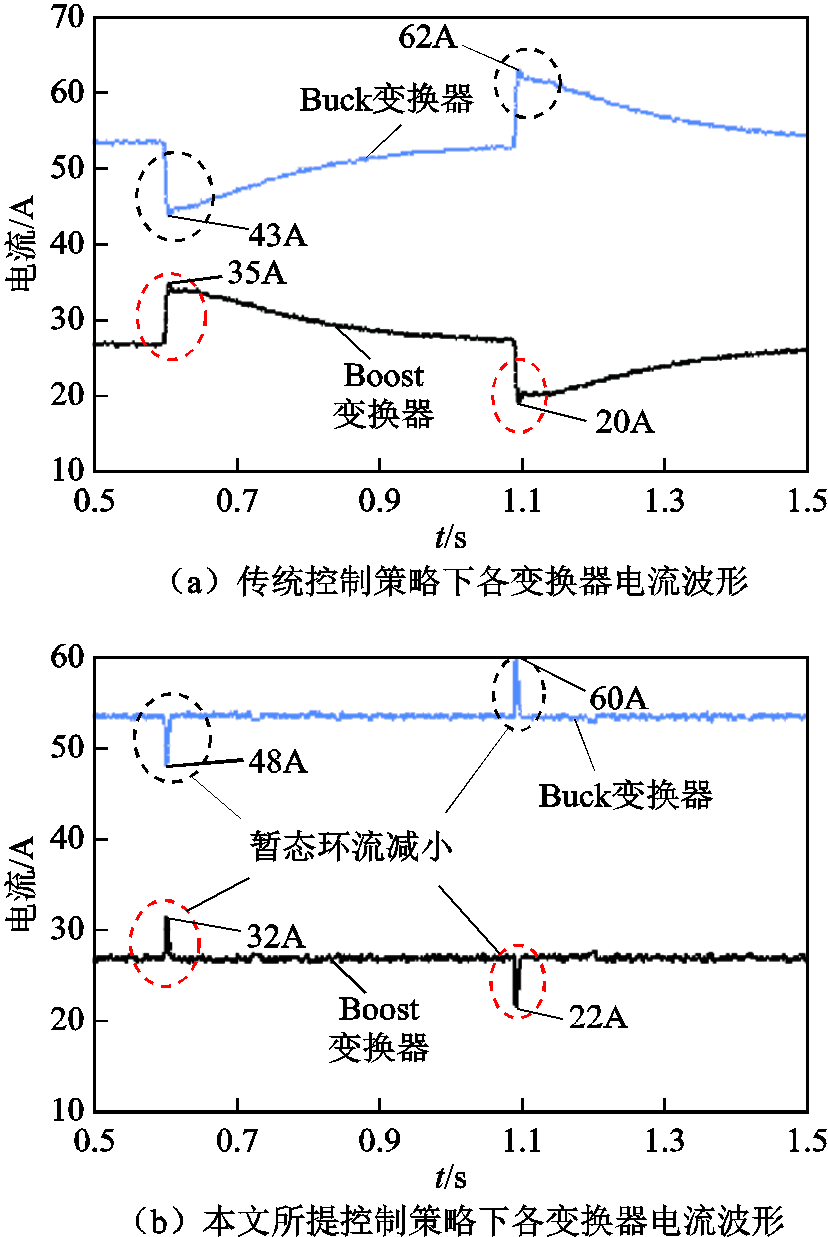
图24 本地负荷投切时变换器线路电流波形对比
Fig.24 Comparison of converter circuit current waveforms when local load is switched on and off
加入动态分散补偿结构后,0.6s时Boost型变换器电流暂升至32A左右,Buck型变换器电流暂降至48A左右,经过0.03s调节至稳态值。1s时Boost型变换器电流暂降至22A左右,Buck型变换器电流暂升至60A左右,经过0.03s左右调节至稳态值。实验表明在不同类型变换器并联的前提下,本文所提控制策略有效降低了本地负荷投切造成的电压冲击,加快了电压电流恢复至稳态的响应时间,抑制了环流的影响。
5.2.2 公共负荷投切实验
设定在0.6s时公共直流负荷切入5Ω负荷,0.9s时公共负荷切出5Ω负荷,直流母线电压波形对比如图25所示。从图25中可以看出,在传统直流下垂控制下,0.6s公共交流负荷切入,电压暂降至382V左右,0.9s公共交流负荷切出,电压暂升至418V左右,经过0.2s左右调节至稳态值。加入动态分散补偿结构后,0.6s时电压暂降至384V左右,0.9s时电压暂升至415V左右,经过0.05s调节至稳态值。实验表明,本文所提出的动态补偿控制策略能够有效地抑制在公共负荷投切情况下的电压波动,加快电压恢复至稳态值的动态响应时间。
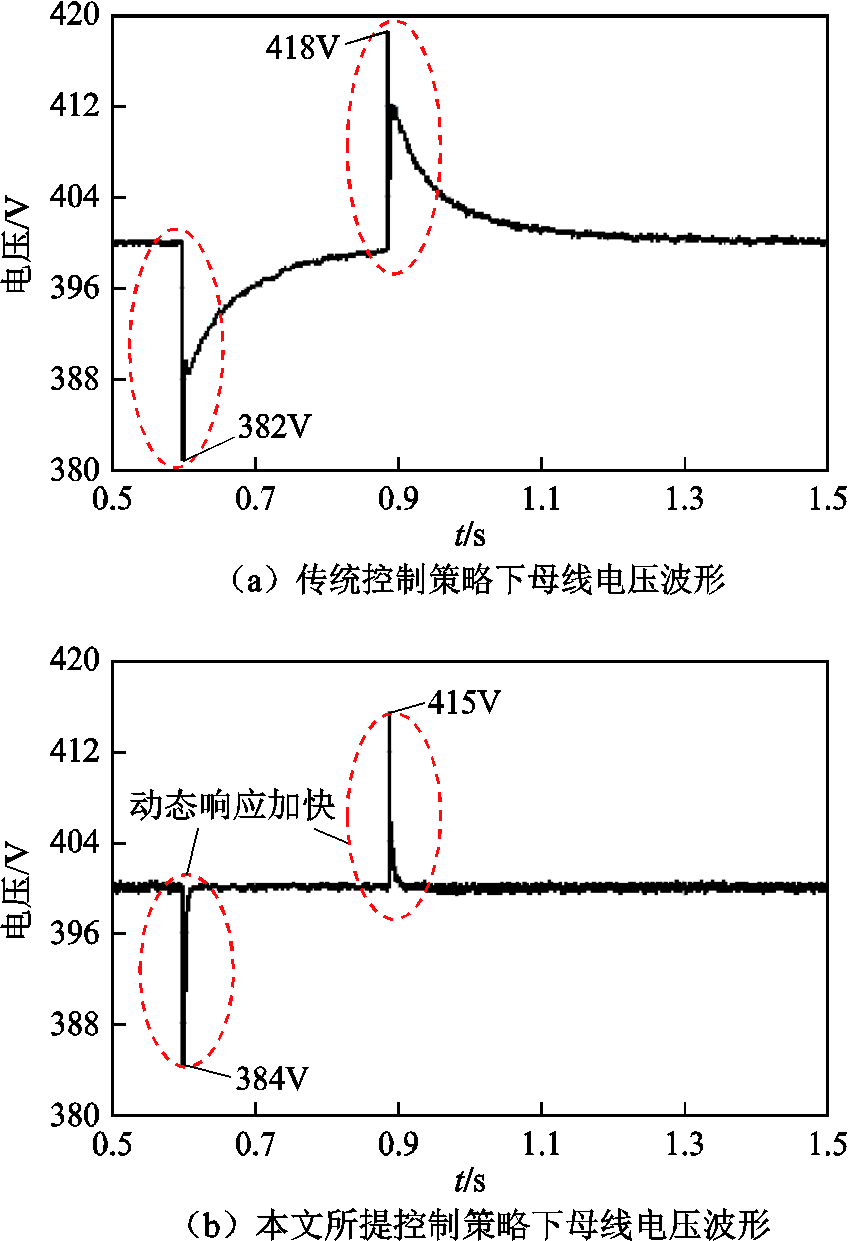
图25 公共直流负荷投切直流母线电压波形对比
Fig.25 Comparison of DC bus voltage waveforms between public DC load switching
5.2.3 双向DC-DC变换器投切实验
实验设定0.6s时第三台Buck型变换器切入,1.1s时第三台Buck型变换器切出。直流母线电压运行波形如图26所示。
从图26中可以看出,在传统直流下垂控制下,0.6s变换器切入,电压变化值极小。经过0.3s调节至稳态值。1.1s变换器切出,电压暂降至382V左右,经过0.2s调节至稳态值。加入动态分散补偿结构后,1.1s时电压暂降至380V左右,经过0.04s调节至稳态值。实验表明,本文所提出的动态分散补偿控制策略能够抑制在变换器投切情况下的电压波动幅值,提高了电压恢复至稳态值的响应时间。
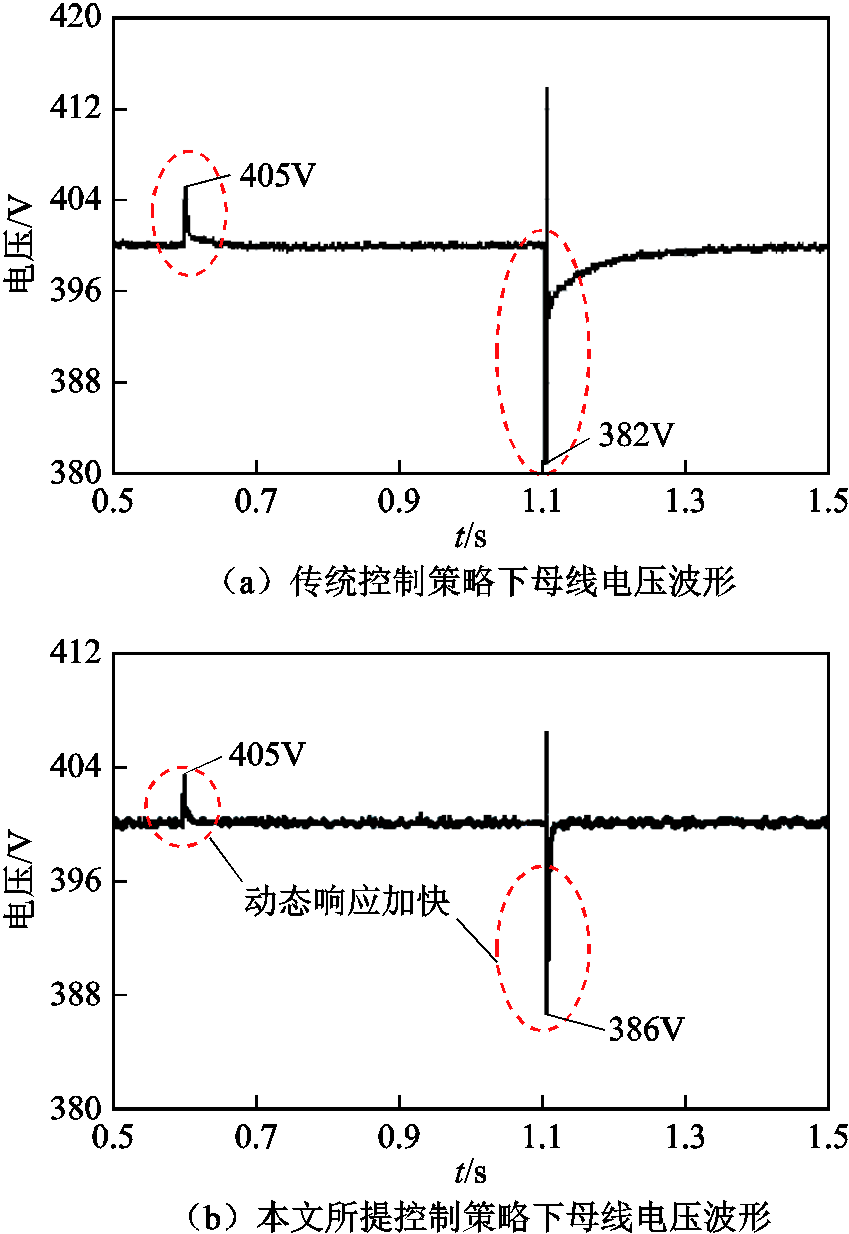
图26 变换器投切时直流母线电压波形对比
Fig.26 Comparison of DC bus voltage waveforms during converter switching
5.2.4 纹波实验
当交流负荷由于故障等原因出现负荷不平衡时,会使直流母线电压出现二倍工频的波动。正常时交流侧负荷为ABC三相1Ω的平衡负荷,0.6s时C相负荷切出,交流负荷变为不平衡负荷。在传统直流下垂控制与本文所提控制结构下的直流母线电压运行波形如图27所示。从图27中可以看出,当交流负荷发生电压不平衡现象时时,直流母线出现幅值为±8V的波动,波动频率为100Hz。加入动态补偿结构后波动幅值变为±3V。实验表明,本文所提出的动态分散补偿控制策略减小了直流电压二倍频波动的幅值,同时加快了不平衡负荷变化时的动态响应,有效避免对设备的危害。
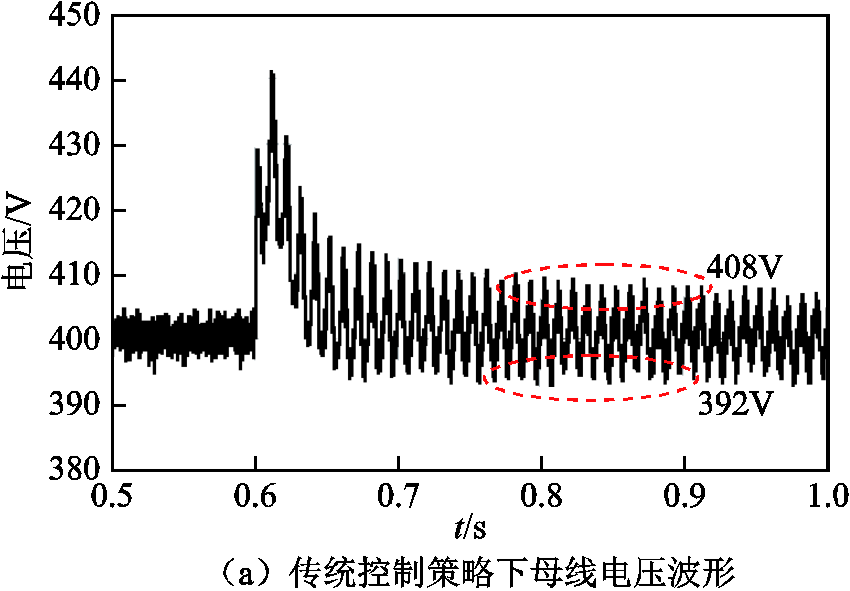

图27 交流侧电压不平衡时直流母线电压波形对比
Fig.27 Comparison of DC bus voltage waveform when AC side voltage is unbalanced
本文在直流微电网多双向DC-DC变换器并联的基础上,提出一种计及直流微电网扰动抑制的残差动态分散补偿控制策略。通过为每个变换器设计补偿控制器,有效地抑制了分布式电源与负荷投切造成的扰动影响,提升了直流母线电压的动态响应速度,抑制环流,减小了由交流侧不平衡负荷导致的直流母线电压二倍工频纹波扰动。本文所提的控制结构具有一定的通用性,可实现不同类型变换器并联的扰动补偿效果。计算的补偿控制器阶次低,补偿位置为电压环输出处,避免了扰动信号对控制器添加新的影响。该控制器不影响直流下垂特性,同时针对传统下垂控制造成的电压跌落问题设计基于最小公倍数的电压补偿项,维持了电压的一致性,保证了电压稳定,更有助于实现“即插即用”功能。
定义直流下垂控制器的状态变量为:α=Uref-Ui*。直流下垂控制器小信号模型为
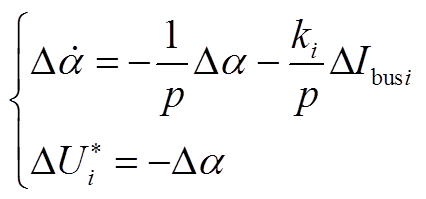 (A1)
(A1)式中,p=0.1。
扰动残差生成器的小信号模型为
 (A2)
(A2)将3.2节计算的动态补偿控制器Q*(s)传递函数转换为状态空间的小信号模型为
 (A3)
(A3)
根据图11可得加入补偿信号的双闭环控制器小信号模型为
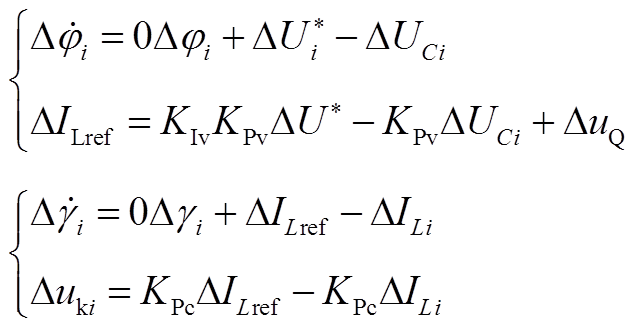 (A4)
(A4)式中,状态量 和
和 为
为 ,
,
 。
。
根据式(6)可以推导单台变换器小信号模型为
 (A5)
(A5)线路小信号模型为
 (A6)
(A6)
状态矩阵可表示为
 (A7)
(A7) (A8)
(A8)
式中,∆ei为扰动残差生成器状态量取小扰动;∆xQ为本文所提控制器状态量去小扰动。
根据式(9)选取Boost型双向DC-DC变换器补偿结构参数矩阵进行小信号稳定性分析,式(A8)中的状态量修改为
 (A9)
(A9)参考文献
[1] Takantape M M, Allahverdinejad B, Hamzeh M. Accurate oscillatory current-sharing in DC microgrids using distributed cooperative control method[J]. IET Smart Grid, 2020, 3(2): 246-253.
[2] 杨新法, 苏剑, 吕志鹏, 等. 微电网技术综述[J]. 中国电机工程学报, 2014, 34(1): 57-70.
Yang Xinfa, Su Jian, Lü Zhipeng, et al. Overview on micro-grid technology[J]. Proceedings of the CSEE, 2014, 34(1): 57-70.
[3] 王盼宝. 低压直流微电网运行控制与优化配置研究[D]. 哈尔滨: 哈尔滨工业大学, 2016.
[4] 李霞林, 郭力, 王成山, 等. 直流微电网关键技术研究综述[J]. 中国电机工程学报, 2016, 36(1): 2-17.
Li Xialin, Guo Li, Wang Chengshan, et al. Key technologies of DC microgrids: an overview[J]. Proceedings of the CSEE, 2016, 36(1): 2-17.
[5] 谢卫才, 李晓凤, 王世豪, 等. 交直流混合微电网频率和电压的无差控制[J]. 电力系统及其自动化学报, 2019, 31(7): 110-116.
Xie Weicai, Li Xiaofeng, Wang Shihao, et al. Deviation-free control of frequent and voltage of AC/DC hybrid micro-grid[J]. Proceedings of the CSU-EPSA, 2019, 31(7): 110-116.
[6] 刘子文, 苗世洪, 范志华, 等. 基于自适应下垂特性的孤立直流微电网功率精确分配与电压无偏差控制策略[J]. 电工技术学报, 2019, 34(4): 795-806.
Liu Ziwen, Miao Shihong, Fan Zhihua, et al. Accurate power allocation and zero steady-State error voltage control of the islanding DC microgird based on adaptive droop characteristics[J]. Transactionsof China Electrotechnical Society, 2019, 34(4): 795-806.
[7] 孟建辉, 邹培根, 王毅, 等. 基于灵活虚拟惯性控制的直流微网小信号建模及参数分析[J]. 电工技术学报, 2019, 34(12): 2615-2626.
Meng Jianhui, Zou Peigen, Wang Yi, et al. Small-signal modeling and parameter analysis of the DC microgrid based on flexible virtual inertia control[J]. Transactions of China Electrotechnical Society, 2019, 34(12): 2615-2626.
[8] 兰征, 涂春鸣, 姜飞. 基于虚拟电机技术的直流微电网与主电网柔性互联策略[J]. 电工技术学报, 2019, 34(8): 1739-1749.
Lan Zheng, Tu Chunming, Jiang Fei. The flexible interconnection strategy between DC microgrid and AC grid based on virtual electric machinery technology[J]. Transactions of China Electrotechnical Society, 2019, 34(8): 1739-1749.
[9] 郭伟, 赵洪山. 基于事件触发机制的直流微电网多混合储能系统分层协调控制方法[J]. 电工技术学报, 2020, 35(5): 1140-1151.
Guo Wei, Zhao Hongshan. Coordinated control method of multiple hybrid energy storage system in DC microgrid based on event-triggered mechanism[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 1140-1151.
[10] 王成山, 李微, 王议锋, 等. 直流微电网母线电压波动分类及抑制方法综述[J]. 中国电机工程学报, 2017, 37(1): 84-98.
Wang Chengshan, Li Wei, Wang Yifeng, et al. DC bus voltage fluctuation classification and restraint methods review for DC microgrid[J]. Proceedings of the CSEE, 2017, 37(1): 84-98.
[11] Wang Cheng, Duan Jiajun, Fan Bo, et al. Decentralized high-Performance control of DC microgrids[J]. IEEE Transactions on Smart Grid, 2019, 10(3): 3355-3363.
[12] Samanta S, Mishra J P, Roy B K. Virtual DC machine: an inertia emulation and control technique for a bidirectional DC-DC converter in a DC microgrid[J]. IET Electric Power Applications, 2018, 12(6): 874-884.
[13] 李鹏, 李鑫明, 陈安伟, 等. 直流微电网DC/DC双向换流器时间-状态协调最优控制[J]. 电网技术, 2018, 42(1): 41-47.
Li Peng, Li Xinming, Chen Anwei, et al. Optimal coordinated time-State control of DC/DC bidirectional converter in DC microgrid[J]. Power System Technology, 2018, 42(1): 41-47.
[14] 朱晓荣, 孟凡奇, 谢志云. 基于虚拟同步发电机的直流微网DC-DC变换器控制策略[J]. 电力系统自动化, 2019, 43(21): 132-144.
Zhu Xiaorong, Meng Fanqi, Xie Zhiyun. Control strategy of DC-DC converter in DC microgrid based on virtual synchronous generator[J]. Automation of Electric Power Systems, 2019, 43(21): 132-144.
[15] 朱晓荣, 候顺达, 李铮. 基于模型预测控制的直流微电网电压动态响应优化[J]. 电网技术, 2020, 44(6): 2187-2195.
Zhu Xiaorong, Hou Shunda, Li Zheng. Voltage dynamic response optimization of DC microgrid based on model predictive control[J]. Power System Technology, 2020, 44(6): 2187-2195.
[16] 郭振, 乐全明, 郭力, 等. 交直流混合微电网中直流母线电压纹波抑制方法[J]. 电网技术, 2017, 41(9): 2896-2904.
Guo Zhen, Le Quanming, Guo Li, et al. Control method of DC bus voltage ripple mitigation in hybrid AC/DC microgrids[J]. Power System Technology, 2017, 41(9): 2896-2904.
[17] Li Xialin, Guo Li, Zhang Shaohui, et al. Observer-based DC voltage droop and current feed-forward control of a DC microgrid[J]. IEEE Transactions on Smart Grid, 2018, 9(5): 5207-5216.
[18] Tah A, Das D. An enhanced droop control method for accurate load sharing and voltage improvement of isolated and interconnected DC microgrids[J]. IEEE Transactions on Sustainable Energy, 2016, 7(3): 1194-1204.
[19] Meng Lexuan, Dragicevic T, Vasquez J C, et al. Tertiary and secondary control levels for efficiency optimization and system damping in droop controlled DC-DC converters[J]. IEEE Transactions on Smart Grid, 2015, 6(6): 2615-2626.
[20] Luo Hao, Yang Xu, Krueger M, et al. A plug-and-play monitoring and control architecture for disturbance compensation in rolling mills[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(1): 200-210.
[21] Luo Hao, Krueger M, Koenings T, et al. Real-time optimization of automatic control systems with application to BLDC motor test rig[J]. IEEE Transactions on Industrial Electronics, 2017, 64(5): 4306-4314.
[22] 谢文强, 韩民晓, 严稳利, 等. 考虑恒功率负荷特性的直流微电网分级稳定控制策略[J]. 电工技术学报, 2019, 34(16): 3430-3443.
Xie Wenqiang, Han Minxiao, Yan Wenli, et al. Hierarchical stability control strategy of DC micro-grid considering constant power load performance[J]. Transactions of China Electrotechnical Society, 2019, 34(16): 3430-3443.
[23] 王康, 金宇清, 甘德强, 等. 电力系统小信号稳定分析与控制综述[J]. 电力自动化设备, 2009, 29(5): 10-19.
Wang Kang, Jin Yuqing, Gan Deqiang, et al. Survey of power system small signal stability and control[J]. Electric Power Automation Equipment, 2009, 29(5): 10-19.
Residual Dynamic Decentralized Compensation Control Strategy Considering Disturbance Suppression in DC Microgrid
Abstract Aiming at the power quality and circulation problems of DC microgrid, a residual dynamic decentralized compensation control strategy which takes into account the disturbance suppression of DC microgrid is proposed. Based on the DC droop control, this strategy first analyzes the disturbance problem of the DC microgrid and the circulation problem in the parallel state. Secondly, a state space model of Buck-type and Boost-type multi-DC-DC converters in parallel is established, and the dynamic decentralized compensation structure of the converter based on residual is derived. The structure is directly compensated at the output of the voltage loop, and the compensation controller Q*(s) is calculated by the disturbance cancellation. The small signal stability analysis method is used to prove the stability of the compensation structure in this paper. Finally, build a digital physics experiment platform based on RTDS, and take the same and different types of converters in parallel for experimental verification. This structure can speed up the dynamic response speed of the DC bus voltage when the distributed power supply and public load are switched on and off, and effectively suppress the influence of circulating current and The double power frequency disturbance of the DC bus voltage caused by the imbalance of the AC side maintains the consistency of the voltage, ensures the stability of the bus voltage, and helps to realize the "plug and play" technology of distributed power.
keywords:Residual, DC droop, state space, plug and play, voltage sag compensation, RTDS
DOI: 10.19595/j.cnki.1000-6753.tces.201298
中图分类号:TM464
北京市高水平创新团队建设计划(IDHT20180502)和国家重点研发计划(2018YFC0809700)资助项目。
收稿日期 2020-09-29
改稿日期 2021-01-04
胡长斌 男,1982年生,博士,副教授,研究方向为智能电网协调优化控制及电力电子变换器鲁棒控制。E-mail:changbinlove@163.com
王慧圣 男,1996年生,硕士研究生,研究方向为微电网电能质量治理。E-mail:1445638373@qq.com(通信作者)
(编辑 赫蕾)